УДК 519.711.3(075.8) Издано при финансовой поддержке ББК...
TRANSCRIPT

УДК 519.711.3(075.8)ББК 22.161.6
И20
Издано при финансовой поддержкеФедерального агентства по печати
и массовым коммуникациямв рамках Федеральной целевойпрограммы «Культура России»
Рецензенты:кафедра «Проблемы управления» Московского института радиотехники,
электроники и автоматики (технический университет)(зам. зав. кафедрой, д-р техн. наук, проф. В. М. Лохин);
д-р техн. наук, проф. В. Л. Афонин
Иванов В. А.И20 Математические основы теории оптимального и логического
управления : учеб. пособие / В. А. Иванов, В. С. Медведев. –– М. :Изд-во МГТУ им. Н. Э. Баумана, 2011. –– 599, [1] с. : ил.
ISBN 978-5-7038-3366-7
В книге, состоящей из двух частей, приведен математический аппарат,используемый в теории оптимального и логического управления. В первойчасти рассмотрены вариационное исчисление, принцип максимума и методдинамического программирования, а также оптимальная фильтрация в не-прерывных и дискретных автоматических системах. Во второй части –– ма-тематический аппарат, используемый в теории автоматического управленияпри синтезе автоматических систем (например, систем управления робота-ми), работающих в условиях неопределенности внешней среды.
Изложение материала сопровождается решением основных задач тео-рии оптимального и логического управления.
Содержание учебного пособия соответствует курсам лекций, которыеавторы читают в МГТУ им. Н. Э. Баумана.
Для студентов, обучающихся по направлению подготовки «Системыавтоматического управления». Будет полезно аспирантам и инженерам, спе-циализирующимся в данной области.
УДК 519.711.3(075.8)ББК 22.161.6
ISBN 978-5-7038-3366-7
c© Иванов В. А., Медведев В. С., 2011c© Оформление. Издательство МГТУ
им. Н. Э. Баумана, 2011

ПРЕДИСЛОВИЕ
Основой настоящего учебного пособия служат разделы специ-альных курсов лекций, которые авторы читают на протяжении рядалет студентам МГТУ им. Н. Э. Баумана, специализирующимся в об-ласти управления техническими объектами. В нем приведен мате-матический аппарат, владение которым необходимо студентам дляпоследующего изучения соответствующих разделов курса «Теорияавтоматического управления».
Учебное пособие является логическим продолжением трехтом-ного издания «Математические основы теории автоматического уп-равления», в состав авторского коллектива которого входили и ав-торы настоящей книги.
В части I пособия на базе теории классического вариационногоисчисления и на основе принципа максимума и динамического про-граммирования изложены методы решения задач оптимизации, т. е.поиска закона управления, обеспечивающего наилучшие показателикачества технической системы. Они и до настоящего времени явля-ются основными математическими методами теории оптимальногоуправления.
В главе 1 приведены определения функционала и функциональ-ного пространства, дано понятие сильного и слабого экстремумафункционала. Рассмотрены необходимое и достаточные условияэкстремума функционала, приведены уравнения Эйлера –– Лагран-жа, необходимое условие экстремума функционалов, зависящихот функций нескольких переменных. Рассмотрены задача Лагранжана условный экстремум, изопериметрическая задача, задачи Майераи Больца. Значительное внимание уделено применению методов ва-риационного исчисления для синтеза оптимальных автоматическихсистем.
В главе 2 изложен принцип максимума и его применение длясинтеза управления в оптимальных автоматических системах. При-ведена основная теорема принципа максимума, на ее основе по-строены оптимальные управления по быстродействию, расходу топ-лива, по квадратичному критерию качества как для непрерывных,так и дискретных систем, оптимальное управление при ограниче-ниях фазовых координат.
Глава 3 посвящена методу динамического программированиядля синтеза оптимального управления дискретными и непрерыв-
4 Предисловие
ными системами. Рассмотрен принцип оптимальности Беллмана,синтез оптимального управления линейными системами по квад-ратичному критерию качества, синтез систем стабилизации.
В главе 4 описана теория оптимальной фильтрации в системахуправления при наличии случайных воздействий. Приведены необ-ходимые и достаточные условия экстремума качества фильтрации(дисперсии ошибки фильтрации) для непрерывных и дискретныхсистем, рассмотрены уравнения Винера –– Хопфа для непрерывныхи дискретных систем, методы решения этих уравнений, дается выводуравнений фильтра Калмана для непрерывных и дискретных систем.
В части II настоящего пособия изложены методы современнойалгебры, необходимые при изучении теории логического управ-ления. В главе 5 даны понятия абстрактного множества, функции,бинарного отношения и графа, а также основные термины абстракт-ной алгебры: кольцо, тело, поле, изоморфизм алгебр.
В главе 6 вводятся основные понятия и законы алгебры логи-ки, рассматривается полнота системы булевых функций и основныеоперации в ней. Приведены примеры реализации логических схеми методы их упрощения. В главе 7 изложены методы исчисленийвысказываний и предикатов. Даны основные определения, правилавывода, а также вопросы применения исчисления предикатов в ма-тематике и технических приложениях. Глава 8 содержит основныеположения теории графов. Приведены основные определения этойтеории, рассматриваются виды графов, методы раскраски графов.
Глава 9 посвящена конечным автоматам. Даны определения ко-нечных автоматов и их классификация, введено понятие алгоритма,рассмотрены способы задания автоматов, а также модели функцио-нирования конечных автоматов в виде сетей Петри.
В главе 10 приведены методы дискретной алгебры и их приме-нение для решения задач управления.
Для усвоения материала книги достаточно знать традиционныекурсы математического анализа и линейной алгебры, читаемые сту-дентам инженерных специальностей.
Часть I книги написана В. А. Ивановым, часть II –– В. С. Медве-девым.
Выражаем глубокую благодарность рецензентам профессоруВ. Л. Афонину и коллективу кафедры «Проблемы управления» Мос-ковского института радиотехники, электроники и автоматикиза многочисленные советы, которые были учтены авторами.
Все замечания читателей по содержанию книги будут принятыс благодарностью.
Часть I
ВАРИАЦИОННЫЕ МЕТОДЫИ ИХ ПРИМЕНЕНИЕ В ЗАДАЧАХ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Гл а в а 1ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
§ 1.1. Функционалы. Непрерывностьи дифференцируемость функционалов
1.1.1. Функциональные пространства
При синтезе оптимальных систем автоматического регулирова-ния и управления в качестве критериев оптимизации используютсяразличные функционалы, которые определены ниже.
Вначале введем понятие функции: если задан закон, по кото-рому каждому числу из некоторого числового множества ставитсяв соответствие другое число, это соответствие называется функ-цией.
Говорят, что на некотором множестве функций задан функ-ционал, если указан закон, по которому каждой функции из это-го множества ставится в соответствие число. В математикерассматриваются три типа соответствий: функции, функционалыи операторы.
Если каждой функции из некоторого множества функций ста-вится в соответствие некоторая другая функция из иного множествафункций, это соответствие называется оператором.
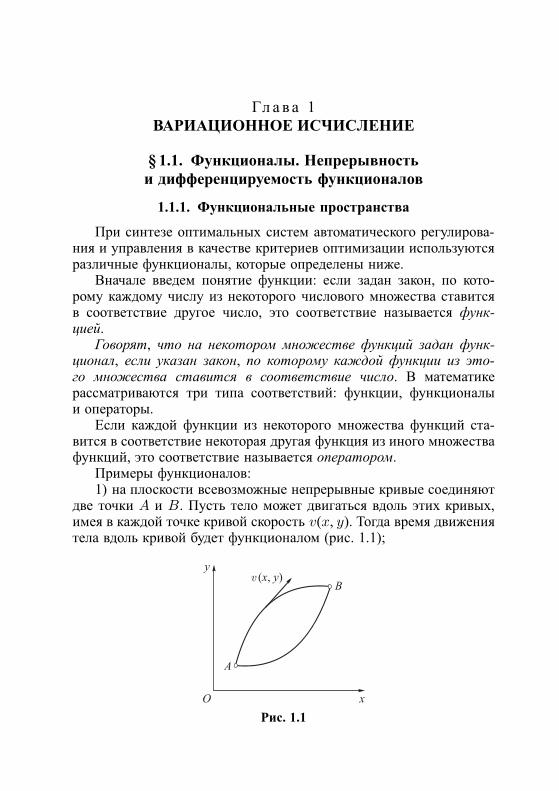
Примеры функционалов:1) на плоскости всевозможные непрерывные кривые соединяют
две точки A и B. Пусть тело может двигаться вдоль этих кривых,имея в каждой точке кривой скорость v(x, y). Тогда время движениятела вдоль кривой будет функционалом (рис. 1.1);
Рис. 1.1

Гл а в а 2ПРИНЦИП МАКСИМУМА
В ТЕОРИИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 2.1. Основная теорема принципа максимума
2.1.1. Постановка задачи оптимального управления
Принцип максимума определяет необходимые условия опти-мальности управления в нелинейных управляемых системах. Онраспространяется и на случай, когда на координаты состояния си-стемы накладываются ограничения типа неравенств.
Прежде чем перейти к рассмотрению основной теоремы прин-ципа максимума, дадим иную, более удобную для дальнейшегоизложения, формулировку основной задачи оптимального управ-ления.
Пусть объект управления описывается системой дифференци-альных уравнений
dxi
dt= fi(x1, . . . , xn, u1, . . . , ur) (i= 1, . . . , n), (2.1)
или в векторной форме
dx
dt= f (x, u),
где x –– n-мерный вектор координат состояния, x= [x1, . . . , xn]; u ––r-мерный вектор управления, u= [u1, . . . , ur].
Полагаем, что вектор управления принимает значения из неко-торой замкнутой области U r-мерного пространства управлений,а функции fi(x, u) непрерывны по всем аргументам и имеют непре-рывные частные производные по зависимым переменным xi. Назо-вем допустимыми управлениями такие управления uj(t), которыеявляются кусочно-непрерывными функциями времени и принима-ют значения из области U .
Основная задача оптимального управления формулируется сле-дующим образом: среди всех допустимых управлений, переводя-щих изображающую точку в фазовом пространстве системы Xиз начального положения x0 в конечное x1, если эти управлениясуществуют, требуется найти такое управление, для которого

Гл а в а 3МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
§ 3.1. Оптимальное управление дискретными системами
3.1.1. Принцип оптимальности
Метод динамического программирования является одним из ме-тодов решения задач оптимального управления. Впервые этот методбыл применен для решения дискретных задач управления, а затемраспространен и на непрерывные задачи.
В основе метода динамического программирования лежит прин-цип оптимальности. Дадим формулировку этого принципа в форме,которая была предложена автором метода динамического програм-мирования американским математиком Р. Беллманом.
Пусть имеется некоторая физическая система, которая харак-теризуется n параметрами, называемыми параметрами состояния.Эта система подвержена многошаговому процессу, причем на каж-дом шаге принимается решение, в результате которого параметрысостояния изменяются. Рассматриваются лишь такие системы, длякоторых предыстория не имеет никакого значения для определениябудущих действий. Следует отметить, что это условие выполня-ется для достаточно широкого класса физических систем. К нимотносятся, в частности, системы, поведение которых описываетсяразностными и обыкновенными дифференциальными уравнениями.
Целью многошагового процесса является выбор такой последо-вательности решений, для которой некоторая функция параметровсостояния системы достигает экстремального (минимального илимаксимального) значения. Назовем стратегией любое правило при-нятия решений. Оптимальная стратегия –– это такая стратегия, длякоторой функция параметров состояния системы имеет экстремаль-ное значение.
В качестве примера многошагового процесса рассмотрим изме-нение k-мерного вектора x[n], описываемое разностным уравне-нием
x[n+ 1] = f (x[n], u[n]), (3.1)
где x –– k-мерный вектор состояния; u –– r-мерный вектор управ-ления.

Гл а в а 4ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ В СИСТЕМАХ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
§ 4.1. Линейные оценки с минимальной дисперсией.Уравнение Винера –– Хопфа
4.1.1. Непрерывные системы. Необходимое и достаточноеусловие экстремума
Вначале рассмотрим задачу для непрерывных систем. Необхо-димо найти оптимальную оценку векторного случайного процес-са x(t) по результатам измерений
z(t)=H(t)x(t)+ v(t), (4.1)
где z(t) –– векторный случайный процесс –– результат измерения(известны его математическое ожидание mz(t) и корреляцион-ная матрица Kz(t1, t2)); v(t) –– векторный случайный процесс ––шум измерения. Оценка x(t) вектора x(t) должна быть несме-щенной, т. е. mx(t)=mx(t). Оптимальную оценку будем искатьв классе линейных оценок, полагая
x(t)= x(t)+t]
t0
W (t, t)z(t) dt. (4.2)
В выражении (4.2) весовая матрица W (t, t) выбирается такимобразом, чтобы оценка доставляла минимум функционалу
J(x)=SpDx(t), (4.3)
где Dx(t) –– матрица дисперсий ошибки оценивания x(t)=x(t)−− x(t). Выберем неслучайный вектор x(t) таким образом, чтобыоценка (4.2) была несмещенной. Имеем
mx(t)= x(t)+t]
t0
W (t, t)mz(t) dt=mx(t).
Тогда оценка (4.2) примет вид
x(t)=mx(t)+t]
t0
W (t, t)z(t) dt. (4.4)

Часть II
ЭЛЕМЕНТЫ ДИСКРЕТНОЙ МАТЕМАТИКИИ ИХ ПРИМЕНЕНИЕ В ЗАДАЧАХ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ

Гл а в а 5АЛГЕБРАИЧЕСКИЕ СИСТЕМЫ
§ 5.1. Множества
5.1.1. Основные определения
Понятие алгебраической системы можно определить с помощьюпонятия множества. Такая система состоит из множества элемен-тов, над которыми выполняются некоторые операции. Под мно-жеством понимают объединение в одно общее объектов, хорошоразличаемых интуитивно. Множество служит фундаментальнымпонятием дискретной математики. Это понятие в дискретной ма-тематике является первичным и не требует строгого определения.Ему соответствует множество синонимов (совокупность кривых,толпа молодежи, стая птиц, группа студентов, класс натуральныхчисел, парк автомобилей и т. д.).
Объекты, образующие множество, называют элементами мно-жества и, как правило, обозначают малыми буквами латинскогоалфавита.
Множество, содержащее конечное число элементов, называютконечным. Если же множество не содержит ни одного элемента,то его называют пустым и обозначают ∅.
Любое конечное множество можно задать с помощью спискавсех его элементов. Этот список обычно заключают в фигурныескобки { }, например, множество M цифр десятичного алфавитаможно задать в виде M = {0, 1, . . . , 9}, или задают описание егосвойств: M = {i | i –– целое, 0 < i < 9}, где справа от вертикальнойчерты указано свойство элементов этого множества. Множество Mчетных чисел можно записать в виде M = {m | m –– четное число}
∗.
Перестановка элементов списка не меняет заданного множества,так множества {1, 2, 4, 8} и {8, 2, 4, 1} совпадают.
Некоторые бесконечные множества можно описать этим жеспособом, указывая как перенумеровать все их элементы и пред-ставить их в виде бесконечной счетной последовательности. Напри-мер, множество всех целых положительных чисел удобно записатьв виде N= {1, 2, . . .}. Аналогично множество всех натуральныхчисел и множество всех неотрицательных целых чисел можно
∗
Знак вертикальная черта («|») заменяет слова «при условии, что ...».

Гл а в а 6АЛГЕБРА ЛОГИКИ
§ 6.1. Функции алгебры логики
Элементы теории множеств могут быть самой различной приро-ды. Например, элементами теории вероятностей являются элемен-тарные события и события, над которыми выполняются операцииалгебры Кантора, удовлетворяющие рассмотренным выше аксио-мам. Элементами алгебры логики служат высказывания. Высказы-ванием называется повествовательное предложение, относитель-но которого можно сделать два взаимно исключающих вывода: илионо истинно или оно ложно.
6.1.1. Основные положения алгебры логикиВ алгебре логики основой является двухэлементное множе-
ство B и двоичные переменные, принимающие значения из B. Этипеременные часто обозначают нулем и единицей, хотя они и не яв-ляются обычными числами. Результаты операций алгебры логикиобычно обозначают 0 –– ложь (false), 1 –– истина (true). Функцией ал-гебры логики является n-местная операция на множестве B = {0, 1}вида f (x1, . . . , xn). Сигнатура алгебры логики включает три опера-ции (функции), конъюнкция & (или ∧), дизъюнкция ∨ и отрицание(или ∼) (см. § 5.3).
Эти операции задаются таблицами истинности (табл. 6.1 ––дизъюнкция; табл. 6.2 –– конъюнкция; табл. 6.3 –– отрицание), каж-дой строке которых взаимно однозначно соответствуют набор зна-чений составляющих высказываний и соответствующее значениесоставного высказывания.
Таблица 6.1
x1 x2 x1 ∨ x2
0 0 0
0 1 1
1 0 1
1 1 1
Таблица 6.2
x1 x2 x1 & x2
0 0 0
0 1 0
1 0 0
1 1 1
Таблица 6.3
x x
0 1
1 0
Операции дизъюнкции, конъюнкции и отрицания читаются со-ответственно как ИЛИ, И и НЕ.
Гл а в а 7ИСЧИСЛЕНИЕ ВЫСКАЗЫВАНИЙИ ИСЧИСЛЕНИЕ ПРЕДИКАТОВ
§ 7.1. Исчисление высказываний
7.1.1. Основные определения
Высказывание –– повествовательное предложение, о которомможно сказать, истинно оно или ложно. Рассмотрим следующиепредложения.
A=Сумма квадратов сторон прямоугольного треугольника рав-на квадрату гипотенузы.
B = Неверно, что сумма квадратов сторон прямоугольного тре-угольника равна квадрату гипотенузы.
C = Если диагонали параллелограмма равны (F ), то такой па-раллелограмм –– прямоугольник (Q).
D =Вы закончили работу над проектом?E = Доброго утра!Первые три предложения являются высказываниями, последние
два, поскольку они не повествовательные предложения, –– не яв-ляются. Высказывания A и C истинны, высказывание B –– ложно.Другими словами, значение истинности высказываний A и C естьистина, а значение истинности высказывания B есть ложь. Истинаобозначается цифрой 1, а ложь –– цифрой 0.
Проанализируем высказывания A –– C с точки зрения их стро-ения. Высказывание A можно назвать простым, а высказывания Bи C –– составными, полученными из простых высказываний. Вы-сказывание B есть отрицание A, а C импликция высказываний:«Если диагонали параллелограмма равны» и «то такой паралле-лограмм –– прямоугольник». Этот пример показывает, что в языке(в данном случае, в русском) существуют способы построения од-них высказываний из других. Такие способы называют операциями.В различных языках (в том числе и в русском) существует многоподобных операций. Как и в алгебре логики, выделим пять ос-новных операций над высказываниями: одномерную –– отрицаниеи двумерные –– конъюнкцию, дизъюнкцию, импликацию (имплик-цию) и эквиваленцию.
Гл а в а 8ЭЛЕМЕНТЫ ТЕОРИИ ГРАФОВ
§ 8.1. Общие положения
Теория графов –– раздел дискретной математики, в котором ис-следуются свойства конечных (а в ряде случаев и бесконечных)множеств с заданными отношениями между их элементами. Теорияграфов позволяет исследовать многие технические, экономические,биологические, социальные и другие системы. Графами, например,описываются модели транспортных систем (железнодорожных, ав-томобильных, авиационных, сетей электро-, нефте- и газоснабже-ния и т. д.), в которых вершинами служат пункты (остановки илипункты производства и потребления продукции), а дугами –– соеди-няющие их пути, схемы электрических цепей. Графами являютсяструктурные схемы автоматических систем, вершинами служат ихзвенья, а дугами соединения для передачи данных между ними. Гра-фами описываются модели технологических объектов, в которыхвершинами являются производственные элементы (заводы, цеха,станки, промышленные роботы и т. д.), а дугами –– потоки сырьяи продукции между ними, а также процессы во многих другихсистемах. В частности, применяя теорию графов можно решатьмногие задачи управления робототехническими системами.
Возникнув при решении головоломок и занимательных задачв XX в., теория графов стала мощным средством решения мно-жества научных проблем. Графы можно применять не только приисследовании геометрических конфигураций. Их часто использу-ют при анализе функционирования различных систем. С отдельны-ми компонентами изучаемой системы связывают вершины графа,а с парами взаимодействия между компонентами –– его ребра (ду-ги). Такой граф называют структурным графом (схемой) системы.
Понятие о графе как о наглядном представлении бинарного от-ношения и некоторые определения из теории графов были рассмот-рены в § 5.2. В настоящей главе дадим более подробное описаниетеории графов.
8.1.1. Графы, их вершины, ребра и дуги
Граф –– система, которая интуитивно может быть рассмотренакак множество его вершин кружков (точек) и множество соединя-

Гл а в а 9КОНЕЧНЫЕ АВТОМАТЫ∗
§ 9.1. Общие положения
9.1.1. Алфавит, буквы, слова. Операции над словами
Конечный автомат состоит из конечного множества элементов,каждый из которых в любой данный момент времени может на-ходиться лишь в одном из конечного числа возможных устойчи-вых состояний. Таким образом, конечный автомат есть некотороеустройство с конечным числом входных и выходных сигналов, на-ходящееся в каждый момент дискретного времени (тактовых мо-ментов) в одном из конечного числа устойчивых состояний.
Конечными автоматами являются как реальные объекты (вычис-лительные машины, дискретные автоматы, роботы, живые организ-мы и т. д.), так и абстрактные системы (формальные грамматики,алгоритмы, аксиоматические теории и пр.).
Большинство задач теории автоматов аналогичны задачам об-щей теории управляющих систем. Это задачи анализа и синтезаавтоматов и их минимизации, эквивалентных преобразований и т. д.
Задача анализа автомата состоит в определении его свойств илиповедения на основе заданной его модели. Задача синтеза состоитв построении требуемой модели автомата по заданным его свой-ствам и поведению. Задача эквивалентных преобразований заклю-чается в определении системы правил преобразования автоматов,позволяющих преобразовать произвольный автомат в ему эквива-лентный. Два автомата являются эквивалентными, если их пове-дение (взаимодействие с внешней средой) одинаково. Например,внешней средой служит множество входных слов, а поведениемфункция функции перехода f . Задача минимизации автомата состо-ит в наиболее простом его представлении при сохранении требуе-мых свойств.
Формально конечным автоматом называется система A== 〈U , Y , X, f , h〉, в которой U (входной алфавит), X (алфавитсостояний), Y (выходной алфавит) –– алфавиты непустые, какправило, конечные множества, а f : U ×X и h : X ×U –– функ-ции, определенные на этих множествах. Эти элементы алфавита
∗
Глава написана в соавторстве с А. В. Назаровой.

Гл а в а 10ПРИМЕНЕНИЕ МЕТОДОВ ДИСКРЕТНОЙ АЛГЕБРЫ
ДЛЯ РЕШЕНИЯ ЗАДАЧ УПРАВЛЕНИЯ
§ 10.1. Планирование действий робота
Характерным примером интеллектуального автоматического уп-равления служит управление действиями робота в заранее неопре-деленной ситуации. Поэтому рассмотрим применение методов ло-гического управления классом робототехнических систем. Однойиз основных проблем робототехники является планирование движе-ния для решения поставленной задачи с последующим контролемвыполнения роботом команд, необходимых для осуществления этихдействий. Под планированием движения здесь понимается приня-тие решения о ходе действия перед выполнением этого движения.
Действия робота могут быть определены системой планиро-вания его действий, которая будет искать пути достижения по-ставленной цели, исходя из некоторой первоначальной ситуации.В этом случае необходим план, представляющий собой последова-тельность действий робота для достижения цели.
Исследования процесса построения решений задач робототех-ники привели ко многим идеям относительно системы построениярешения задач в области искусственного интеллекта. В обычнойпостановке задачи мы имеем робот, оснащенный датчиками и спо-собный выполнять элементарные действия в несложном рабочемпространстве. Действия робота преобразуют одно состояние (иликонфигурацию) рабочего пространства в другое. Например, в рабо-чем пространстве несколько объектов могут располагаться на столеили друг на друге, а робот, состоящий из телевизионной камеры,манипулятора и схвата, поднимает или передвигает эти объекты.В некоторых задачах робототехники робот представляет собой по-движную тележку с телевизионной камерой, выполняющую такиеоперации, как, например, перемещение объектов в рабочем про-странстве. Далее кратко рассмотрим несколько методов принятиярешений и их применение к планированию действий робота.
10.1.1. Поиск решения в пространстве состояний
Один из методов решения задачи состоит в последовательнойпроверке различных возможных вариантов до тех пор, пока мы

ЛИТЕРАТУРА
1. Белоусов А. Н., Ткачев С. Б. Дискретная математика. М.: Изд-воМГТУ им. Н. Э. Баумана, 2002.
2. Горбатов В. А., Горбатов А. В., Горбатова М. А. Дискретная мате-матика. М.: АСТ: Астрель, 2006.
3. Демидович Б. Г. Элементы теории множеств в курсе математическо-го анализа. М.: АСТ: Астрель, 2006.
4. Ерусалимский Я. М. Дискретная математика: теория, задачи, прило-жения. М.: Вузовская книга, 2000.
5. Курош А. Г. Курс высшей алгебры. СПб.: Изд-во «Лань», 2006.6. Курош А. Г. Лекции по общей алгебре. СПб.: Изд-во «Лань», 2006.7. Кузнецов О. П. Дискретная математика для инженера. СПб.: Изд-во
«Лань», 2007.8. Романовский И. В. Дискретный анализ. СПб.: Невский Диалект;
БХВ –– Петербург, 2004.8. Яблонский С. В. Введение в дискретную математику. М.: Наука,
1980.

ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автомат (конечный) 515–– алфавит 515–– асинхронный 516–– детерминированный 524–– Мили 519–– Мура 520–– с магазинной памятью 536–– недетерминированный 528–– полностью определенный 529–– с несколькими входами и выходами
539–– с ограничениями на входе 539–– с переменной структурой 542–– синхронный 516–– управляющий 535–– язык 511Алгебра 357–– булева 372–– ––, свойства 363–– Жегалкина 384–– Кантора 361–– ––, свойства 363–– кольцо 360–– множеств 357–– логики 399–– ––, базисы 408–– поле 360–– тело 360Алгоритм 516–– Краскала 573–– Форда –– Фалкерсона 583Алфавит 515Ассоциативность 358
Брахистохрона 9, 26Булеан 335Быстродействие 163, 241, 265
Вариация вторая 17–– игольчатая 151–– первая 16
Вариация вторая при незакрепленныхконцах кривой 55, 57
Высказывание 399Вывод в исчислении высказываний
435–– в исчислении предикатов 449
Гомоморфизм алгебр 365Граф 348, 456––, вершина 348, 457–– –– концевая (висячая) 348, 459–– –– изолированная 348, 459–– –– коинцидентная 457–– –– конечная 348, 459–– –– начальная 350, 457–– –– смежная (инцидентная) 348, 456––, гиперграф 462–– гомеоморфный 476–– двудольный 478––, дерево 483–– ––, корень 485–– ––, лес 484––, длина 466––, диаметр 467––, дуга 348, 457–– –– инцидентная 348, 457–– –– смежная 350, 456–– изоморфный 475–– квазиэйлеров 482––, компонента связности 468–– –– сильной связности 468–– конечный 459–– критический (квазиполный) 502–– локальная степень (степень) 459––, маршрут 464–– ––, внутренние (промежуточные)
точки 465–– ––, конец, начало 465–– ––, цепь 465–– –– ––, длина 466–– –– ––, высота 466

592 Предметный указатель
Граф, маршрут, цепь, расстояние 466–– ––, цикл 465–– –– циклический 465–– модельный (мограф) 348––, мост 471––, мощность 458––, мультиграф 462––, надграф 462–– неориентированный 350, 457–– несвязный 472––, носитель 348–– однородный 462––, окрестность единичного радиуса
349–– ориентированный 348, 457–– планарный 477–– ––, толщина 479––, подграф 461–– полный 459–– правильный 477–– пустой 458––, радиус 467––, разделяющее множество 471––, размер 458––, разрез 471––, раскраска 487–– ––, хроматическое число 496––, связность 464––, связные компоненты 467––, сигнатура 348–– связный 467–– системы управления 489––, смежные вершины 347–– структурный 456––, центр 467––, цепь простая 465–– –– радиальная 468–– –– сложная (составная) 465–– –– элементарная 466–– частичный 461––, число связности 468–– –– сильной связности 473–– эйлеров 481–– ––, критерий эйлеровости 481Граф, изоморфизм 475
Группа 358Группоид 357–– аддитивный 357–– ассоциативный (полугруппа) 358–– идемпотентный 358–– коммутативный (абелев) 358–– мультипликативный 348
Декартово произведение множеств 341–– ––, элементы 341Диаграмма Эйлера (Венна) 336Дизъюнктивная нормальная форма 404Динамическое программирование 251Дифференциал функционала 16–– –– второй 17–– –– сильный (дифференциал Фреше)
16–– –– слабый (дифференциал Гато) 16
Задача Больца–– о максимальном потоке 581–– –– –– ––, алгоритм Форда ––
Фалкерсона 582–– вариационного исчисления
простейшая 21–– –– –– изопериметрическая 95–– Лагранжа с голономными связями
79–– –– с неголономными связями 82–– –– на условный экстремум–– –– –– ––, множители 83–– Майера 99–– –– –– на минимум расхода топлива
вырожденная 188–– –– –– нормальная 188–– –– –– на условный экстремум 77–– –– –– о замене оборудования 262–– –– –– о мягкой посадке 101–– –– –– о стабилизации спутника
по направлению 277–– с закрепленными границами 21–– с подвижными границами 57, 60Задача слежения 212–– Чаплыгина 91
Предметный указатель 593
Изоморфизм 365–– алгебр 366–– графов 476Импликция 428Интеграл Гильберта 70Исчисление высказываний 428–– –– операции 428–– ––, правила вывода 434–– вариационное 9–– ––, простейшая задача 21–– предикатов 436–– ––, операции 440–– ––, правила вывода 449
Конституента 375Карта Карно 389Конъюнктивная нормальная форма 404Критерий оптимизации квадратичный
115, 206, 245, 275–– Сильвестра 31
Лемма Дюбуа-Реймона 13–– Лагранжа 12
Максимум абсолютный 19Матрица инциденций 462–– смежности 357, 464Машина Тьюринга 512Местность (арность) алгебры 357Метод двух включений 334–– динамического программирования
251–– Квайна –– Мак-Клоски 385Минимум абсолютный 19Миноранта (мажоранта) подмножества
352Многочлен Жегалкина 407–– –– линейный 408Множества 333–– изоморфные 243–– равные 334
Множество 333––, верхняя грань 367––, импликанта простая 384––, интервал 384–– –– максимальный 384––, ранг 384–– конечное 333––, мощность 335––, нижняя грань 367––, операции 336–– пустое 333–– упорядоченное, линейное 352––, фактор-множество 349–– частично упорядоченое 351––, элементы 333Множители Лагранжа 82Моноид 358
Нейтральный элемент 360Норма 9Нормальная форма Кантора 378–– –– –– двойственная 379–– –– –– минимальная 383–– –– –– сокращенная 384–– –– –– тупиковая 385
Ограничения на управляющеевоздействие 126
Окрестность единичного радиуса 349Операции над множествами 336–– –– –– законы 337Оператор 7Операция 345–– n-местная (бинарная, унарная) 345––, булево объединение 345–– –– пересеченение 345Оптимальность по быстродействию
для линейных стационарныхсистем 240
–– –– –– при ограничении фазовыхкоординат 220
Основная теорема принципамаксимума 148
Отношение бинарное 345–– –– антисимметричное 351
594 Предметный указатель
Отношение бинарное, близость 352–– –– включения 351–– –– линейно упорядоченное 352–– –– рефлексивное 350–– –– симметричное 350–– –– строгой упорядоченности 351–– –– транзитивное 351–– –– упорядочености 351–– –– эквивалентности 355
Параметры состояния 251Планирование управления роботом
556–– –– –– в пространстве состояний 556–– –– –– вычислением различия 563–– –– –– методом логического вывода
562–– –– –– с использованием исчисления
предикатов 565Поверхность переключения 184Подмножество 334–– собственное (строгое) 334Подрешетка (цепь) 369Поиск кратчайшего пути на графе 567–– –– ––, алгоритм Дейкстры 568–– –– –– –– Краскала 573–– –– –– –– Форда –– Фалкерсона 571Поле 67–– собственное 67–– центральное 67–– экстремалей 67Последовательность 341Предикат 437––, аксиомы 442, 443––, алфавит 438––, правила вывода 450––, операции (связки) 440––, кванторы 440––, логические операции 440––, навешивание кванторов 444––, операции с навешенными
кванторами 446––, предметные переменные 438
Предикат, предметные постоянные 438––, фиксация переменных 443––, формулы 439Принцип двойственности 354–– максимума Понтрягина 145–– –– для дискретных систем
управления 231–– –– для неавтономных систем 204–– –– для оптимальности
по быстродействию 155–– оптимальности Беллмана 252Программирование динамическое 251Пространство нормированное 9–– функциональное 9Процесс бесконечношаговый 252–– многошаговый 252
Разбиение множества 356–– тривиальное 355Решение уравнения Винера –– Хопфа
для непрерывной стационарнойзадачи 237
–– –– –– –– для дискретнойстационарной задачи 301
Решетка (структура) 366––, верхняя грань 367–– –– –– наименьшая (НВГ) 367–– дистрибутивная 370––, интервал 369–– модулярная (дедекиндова) 371––, нижняя грань 367–– –– –– наибольшая (ННГ) 367––, элементы дополнительные 371––, элементы связные 371
Сеть Петри 542–– –– маркированная 546Синтез оптимального регулятора 211,
275–– –– –– для колебательного звена 88–– линейных систем управления,
оптимальных по квадратичномукритерию 115, 204
–– –– дискретных систем управления,оптимальных по квадратичномукритерию 243

Предметный указатель 595
Система линейная, оптимальнаяпо квадратичному критерию 115,204, 245
–– нормальная 163–– оптимальная по быстродействию
155, 274Стабилизация спутника
по направлению 277Стратегия 251–– оптимальная 251Структурированные нуль и единица
369
Теорема Лежандра 28–– ––, условие 28, 39–– –– –– усиленное 31–– о числе переключений 168–– об n интервалах 166–– Стоуна 373–– Эйлера 460Теория исчисления высказываний 428–– –– предикатов 436Терм первичный (литерал) 375Точка регулярная 221–– сопряженная 30, 40Траектория регулярная 222Трансверсаль поля экстремалей 69
Универсум 335Управление допустимое 146–– линейными объектами,
оптимальное по расходу топлива185
–– оптимальное при ограничениикоординат состояния 220
–– –– дискретными системами 253–– –– непрерывными системами 270–– –– по быстродействию 152, 241Уравнение Беллмана 270–– –– для стационарной задачи
с фиксированными границами 272–– Винера –– Хопфа 230, 235–– –– –– решение для непрерывной
задачи 237–– –– –– –– для дискретной задачи 301
Уравнение матричное типа Риккати211, 275
–– фильтра Калмана для дискретнойзадачи 321
–– –– –– для непрерывной задачи 313–– –– –– для стационарной дискретной
задачи 326–– –– –– –– –– непрерывной задачи 316–– Эйлера 22–– Эйлера –– Лагранжа 35–– Эйлера –– Пуассона 48–– Якоби 31Уравнения Эйлера
в дифференциальной форме 282–– –– в интегральной форме 282–– Эйлера –– Лагранжа 35, 84Условие Лежандра 28, 39–– –– усиленное 31–– необходимое экстремума второе 19–– –– –– первое 19–– скачка 223Условия Вейерштрасса –– Эрдмана 65–– достаточные локального
экстремума 20–– –– слабого минимума функционала
39–– необходимые экстремума
функционала 19, 38–– трансверсальности 58, 63, 238
Фактор множество 349Фильтрация оптимальная в линейных
непрерывных системах 307–– –– –– –– –– при наличии
детерминированного процессана входе 311
–– –– –– дискретных системах 315–– –– –– –– –– при наличии
детерминированного процессана входе 322
Формула 429–– выводимая 433–– невыводимая 433–– рекуррентная для оптимального
управления 256

596 Предметный указатель
Формулы исчисления высказываний429
–– –– –– равносильные(эквивалентные) 430
–– –– –– тождественно истинные 430–– –– предикатов 439–– –– ––, правила вывода 449Функционал 8–– билинейный 11–– дифференцируемый в точке 15–– –– дважды 16–– квадратичный 11–– линейный 10–– непрерывный в области 10–– –– в точке 10Функционалы от кривых, заданных
в параметрической форме 43–– с подвижными границами 52Функции алгебры логики 401–– –– ––, аксиомы 400–– –– ––, свойства операций 401
Функции алгебры логики, таблицыистинности 400
–– теории множеств 341–– –– ––, биекция 343–– –– ––, инъекция 343–– –– ––, обратимая 342–– –– ––, сюръекция 343–– –– ––, тождественная 343Функция Вейерштрасса 71–– Гамильтона 289
Цепь 465–– вершинно-непересекающаяся 469–– реберно-непересекающаяся 469
Шум измерения 289
Экстремаль 22Экстремум функционала 8, 18–– –– локальный 18–– –– сильный 19–– –– слабый 19, 22
ОГЛАВЛЕНИЕ
Предисловие . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
ЧАСТЬ I
ВАРИАЦИОННЫЕ МЕТОДЫ И ИХ ПРИМЕНЕНИЕВ ЗАДАЧАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Гл а ва 1. Вариационное исчисление . . . . . . . . . . . . . . . . . . . . 7§ 1.1. Функционалы. Непрерывность и дифференцируемость функ-
ционалов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7§ 1.2. Простейшая задача вариационного исчисления . . . . . . . . . . 20§ 1.3. Слабый экстремум функционалов, зависящих от n функций
и от кривых, заданных в параметрической форме . . . . . . . . 34§ 1.4. Слабый экстремум функционалов, зависящих от производ-
ных высших порядков и от функций нескольких переменных 47§ 1.5. Необходимые условия экстремума функционалов, завися-
щих от кривых с подвижными границами . . . . . . . . . . . . . . . 52§ 1.6. Применение теории поля для определения экстремумов
функционалов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67§ 1.7. Задача Лагранжа на условный экстремум . . . . . . . . . . . . . . . 77§ 1.8. Изопериметрическая задача. Задачи Майера и Больца . . . . . 95§ 1.9. Использование методов вариационного исчисления при син-
тезе оптимальных автоматических систем . . . . . . . . . . . . . . . 113Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Гл а ва 2. Принцип максимума в теории оптимальногоуправления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145§ 2.1. Основная теорема принципа максимума . . . . . . . . . . . . . . . . 145§ 2.2. Оптимальное по быстродействию управление . . . . . . . . . . . 154§ 2.3. Оптимальное по быстродействию управление линейными
объектами . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162§ 2.4. Управление линейными объектами, оптимальное по расходу
топлива . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185§ 2.5. Синтез линейных систем управления, оптимальных по квад-
ратичному критерию . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204§ 2.6. Оптимальное управление при ограничении координат состо-
яния . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220§ 2.7. Принцип максимума для дискретных систем управления . . 231

598 Оглавление
§ 2.8. Оптимальное по быстродействию управление в дискретныхсистемах . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
§ 2.9. Синтез линейных дискретных систем, оптимальных по квад-ратичному критерию . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Гл а ва 3. Метод динамического программирования . . . . . . 251§ 3.1. Оптимальное управление дискретными системами . . . . . . . 251§ 3.2. Оптимальное управление непрерывными системами . . . . . . 268§ 3.3. Синтез оптимального по квадратичному критерию управле-
ния для линейных систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273§ 3.4. Связь между вариационным исчислением, принципом мак-
симума и динамическим программированием . . . . . . . . . . . . 280Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
Гл а ва 4. Оптимальная фильтрация в системахавтоматического управления . . . . . . . . . . . . . . . . . . . . . . . . 288§ 4.1. Линейные оценки с минимальной дисперсией. Уравнение
Винера –– Хопфа . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288§ 4.2. Решение уравнения Винера –– Хопфа для одномерной стаци-
онарной задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297§ 4.3. Оптимальная фильтрация в линейных непрерывных си-
стемах . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307§ 4.4. Оптимальная фильтрация в линейных дискретных системах 315Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329
ЧАСТЬ II
ЭЛЕМЕНТЫ ДИСКРЕТНОЙ МАТЕМАТИКИИ ИХ ПРИМЕНЕНИЕ В ЗАДАЧАХ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Гл а ва 5. Алгебраические системы . . . . . . . . . . . . . . . . . . . . . 333§ 5.1. Множества . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333§ 5.2. Бинарные отношения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345§ 5.3. Алгебры . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357§ 5.4. Минимизация представления множеств . . . . . . . . . . . . . . . . . 374Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
Гл а ва 6. Алгебра логики . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399§ 6.1. Функции алгебры логики . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
Оглавление 599
§ 6.2. Полнота системы логических функций . . . . . . . . . . . . . . . . . 405§ 6.3. Упрощение функций алгебры логики . . . . . . . . . . . . . . . . . . . 415Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425
Гл а ва 7. Исчисление высказываний и исчислениепредикатов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427§ 7.1. Исчисление высказываний . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427§ 7.2. Исчисление предикатов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455
Гл а ва 8. Элементы теории графов . . . . . . . . . . . . . . . . . . . . . 456§ 8.1. Общие положения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456§ 8.2. Связность в графах . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464§ 8.3. Эйлеровы графы, критерий эйлеровости . . . . . . . . . . . . . . . . 480§ 8.4. Деревья и леса . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483§ 8.5. Граф системы управления . . . . . . . . . . . . . . . . . . . . . . . . . . . . 489§ 8.6. Раскраска графов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 507
Гл а ва 9. Конечные автоматы . . . . . . . . . . . . . . . . . . . . . . . . . . 510§ 9.1. Общие положения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 510§ 9.2. Машина Тьюринга . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512§ 9.3. Способы задания конечного автомата . . . . . . . . . . . . . . . . . . . 515§ 9.4. Расширение понятия «конечный автомат» . . . . . . . . . . . . . . . 536§ 9.5. Моделирование конечных автоматов сетями Петри . . . . . . . 542Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554
Гл а ва 10. Применение методов дискретной алгебрыдля решения задач управления . . . . . . . . . . . . . . . . . . . . . . 556§ 10.1. Планирование действий робота . . . . . . . . . . . . . . . . . . . . . . . 556§ 10.2. Задача об управлении действиями робота в заранее неопре-
деленной обстановке . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 560§ 10.3. Экстремальные пути и контуры на графах . . . . . . . . . . . . . . 567Вопросы и задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 587
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 590
Предметный указатель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 591

Учебное издание
Иванов Виктор АлександровичМедведев Владимир Степанович
МАТЕМАТИЧЕСКИЕ ОСНОВЫ ТЕОРИИ ОПТИМАЛЬНОГОИ ЛОГИЧЕСКОГО УПРАВЛЕНИЯ
Редактор Н. Е. Овчеренко
Технический редактор Э. А. Кулакова
Художник Н. Г. Столярова
Компьютерная графика О. В. Левашовой, М. А. Голуба
Корректор Р. В. Царева
Компьютерная верстка М. А. Голуба
Оригинал-макет подготовленв Издательстве МГТУ им. Н. Э. Баумана.
Санитарно-эпидемиологическое заключение№ 77.99.60.953.Д.003961.04.08 от 22.04.2008 г.
Подписано в печать 05.08.2011. Формат 60×90 1/16.Усл. печ. л. 37,5. Тираж 1000 экз. Заказ
Издательство МГТУ им. Н. Э. Баумана.105005, Москва, 2-я Бауманская ул., 5.
E-mail: [email protected]://www.baumanpress.ru
Отпечатано в типографии МГТУ им. Н. Э. Баумана.105005, Москва, 2-я Бауманская ул., 5.
Тел. 8-499-263-62-01
ISBN 978 5 7038 3366 7
9 785703 833667