드론 분야의 기술 트렌드 및 발전 방향 - 김태호 실장
TRANSCRIPT



2
2015 CE Show
“Attack of the drones”, USA Today Tech CES 2015
* http://www.cesweb.org

3
2015 CE Show
“Attack of the drones”, USA Today Tech CES 2015
* http://www.pcmag.com
Airdog DJI Inspire 1 DJI Ghost Harwar Military Drone
Hubsan ProtoX MaxAero X-Star Zano Nano Selfie Drone Parrot Bebop
4
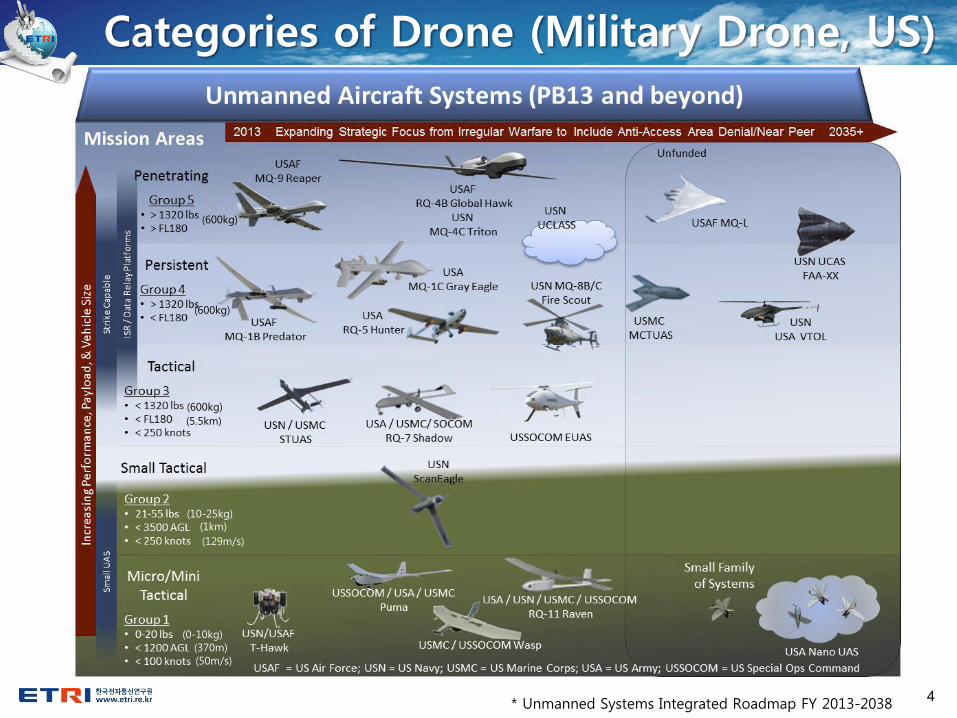
Categories of Drone (Military Drone, US)
* Unmanned Systems Integrated Roadmap FY 2013-2038
(600kg)
(600kg)
(600kg)
(10-25kg)
(0-10kg)
(129m/s)
(50m/s)(370m)
(1km)
(5.5km)
5
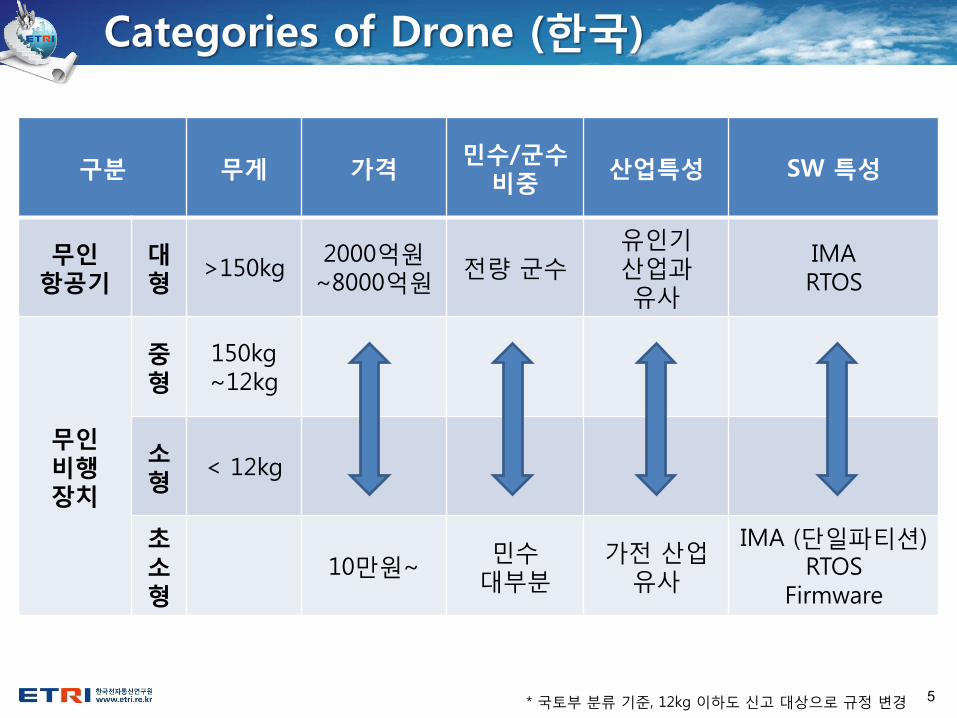
Categories of Drone (한국)
* 국토부 분류 기준, 12kg 이하도 신고 대상으로 규정 변경
구분 무게 가격민수/군수
비중산업특성 SW 특성
무인항공기
대형
>150kg2000억원~8000억원
전량 군수유인기산업과유사
IMARTOS
무인비행장치
중형
150kg~12kg
소형
< 12kg
초소형
10만원~민수
대부분가전 산업
유사
IMA (단일파티션)RTOS
Firmware

6
무인기 시스템 구성
출처: 국토교통부 홈페이지
합성개구레이더 가시광선/적외선
위성 통신
7
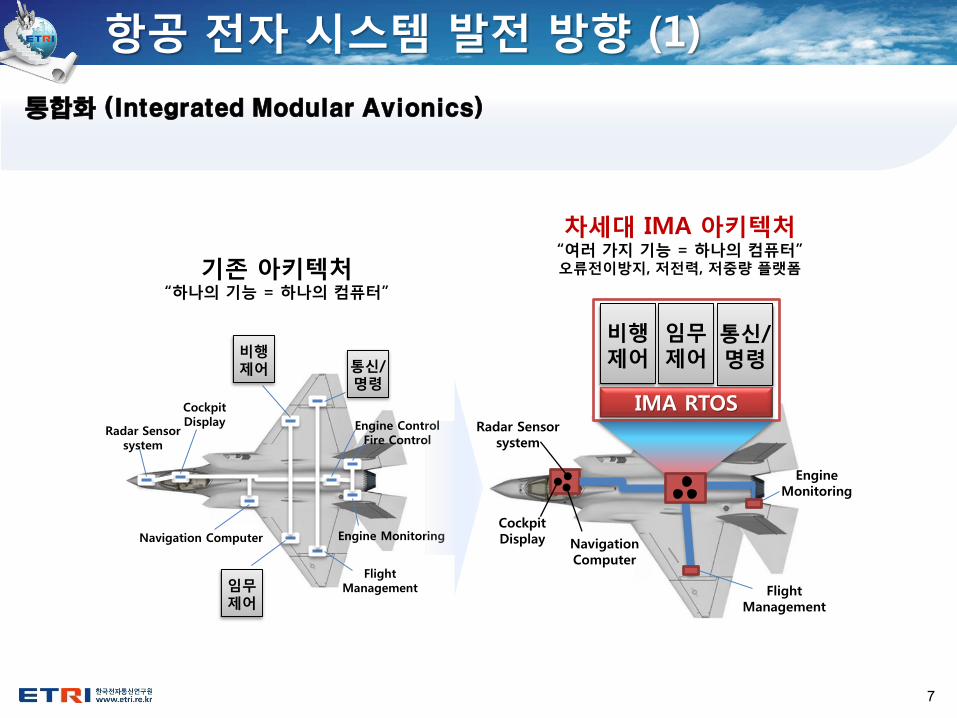
항공 전자 시스템 발전 방향 (1)
Radar Sensorsystem
Cockpit Display Navigation
Computer
Flight Management
Engine Monitoring
Radar Sensorsystem
Cockpit Display
Navigation Computer
Flight Management
Engine Monitoring
Engine ControlFire Control
기존 아키텍처“하나의 기능 = 하나의 컴퓨터”
차세대 IMA 아키텍처“여러 가지 기능 = 하나의 컴퓨터”오류전이방지, 저전력, 저중량 플랫폼
비행제어
임무제어
통신/명령
비행제어
임무제어
통신/명령
IMA RTOS
통합화 (Integrated Modular Avionics)
8
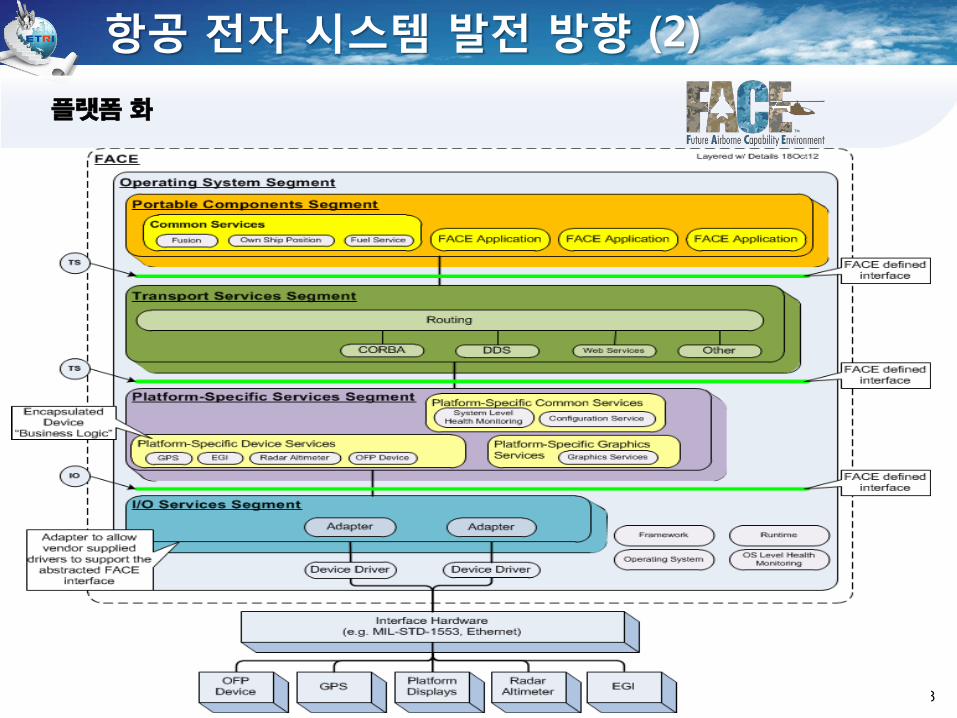
항공 전자 시스템 발전 방향 (2)
플랫폼 화

9
항공 전자 시스템 발전 방향 (3)
표준화 및 솔루션 화 (예, 무인기 표준 SW 플랫폼 및 Test-bed 개발 사업)
Partitioned Kernel

10
IMA RTOS 구조
Flight Control(Level A)
Mission Control(Level B)
Comm(Level C)
IMA RTOS
PortabilityReusability Modularity
Mixed-Criticality
Partition Manager
BSP
PartitionPartition
Flight Control
Mission Control
Comm.
Partition
VM Manager
μ-kernel
Linux
WiFi 등다양한 Comm.
FlightCont.
Qplus-AIR
Qplus-HYPER
Qplus-AIR
MissionCont.
Safe and ReliableRTOS
Hypervisor
(2010.10-2013.3)
(2012.6-2017.2)

11
WBS 무인기 비행제어 컴퓨터 하드웨어

12
WBS 무인기 비행시험 국내 최초 국산 RTOS 비행 시험
2013.2. 고흥
13
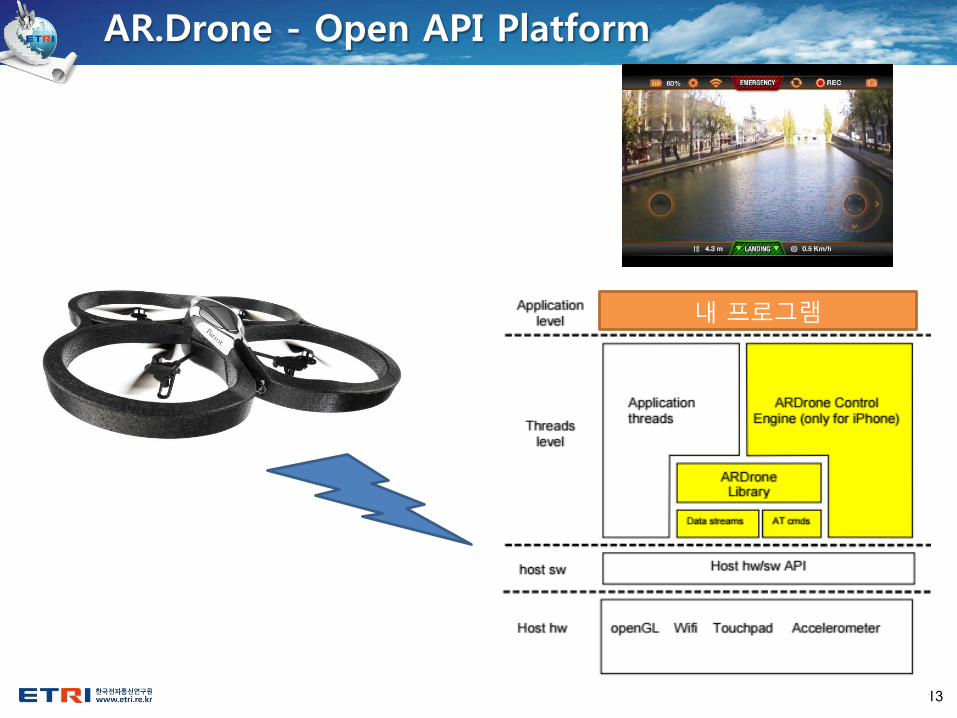
AR.Drone - Open API Platform
내 프로그램
14
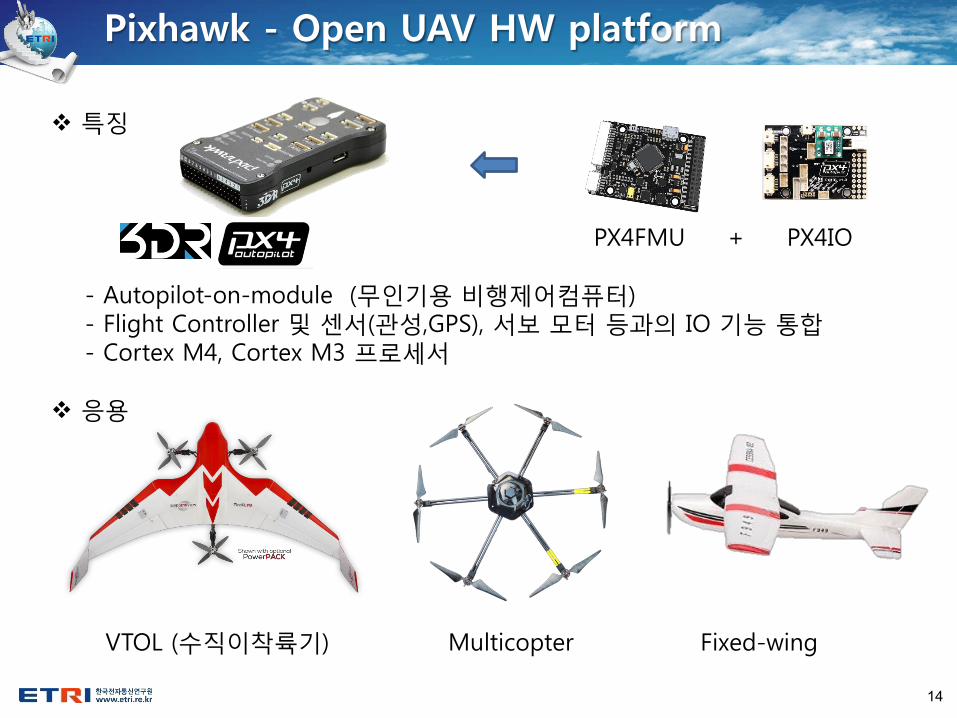
Pixhawk - Open UAV HW platform
� 특징
PX4FMU + PX4IO
- Autopilot-on-module (무인기용 비행제어컴퓨터)- Flight Controller 및 센서(관성,GPS), 서보 모터 등과의 IO 기능 통합- Cortex M4, Cortex M3 프로세서
� 응용
VTOL (수직이착륙기) Multicopter Fixed-wing

15
Dronecode - Open source UAV platform
� 구성-
, (ArduPilot, Hardware, Firmware, Mission Planner)
- Linux Foundation 에서 운영- Amazon, Hexo+, Airdog, Horizon Precision Agriculture 등에서 이용
� 참여 멤버
16
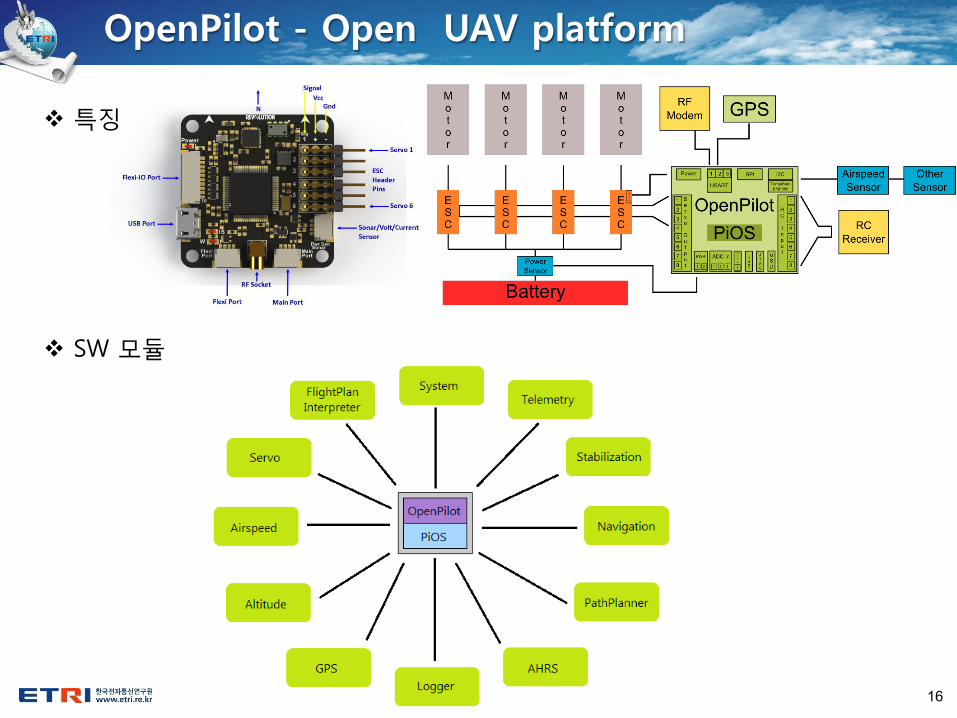
OpenPilot - Open UAV platform
� 특징
� SW 모듈

17
탑재드론
태블릿 기반지상국
실시간 항공 RTOS (RTNOS) 탑재 드론 SDK
� +
� 자율비행이 가능한 드론용 임베디드 SW 개발자 플랫폼� ETRI 개발 Qplus-AIR RTOS 기반 창업
운영체제
비행제어라이브러리
비행제어
자동비행
충돌회피
COTS HW통합개발환경
경로생성
안전회기
<시스템 설정>
<드론 응용 설정>
18
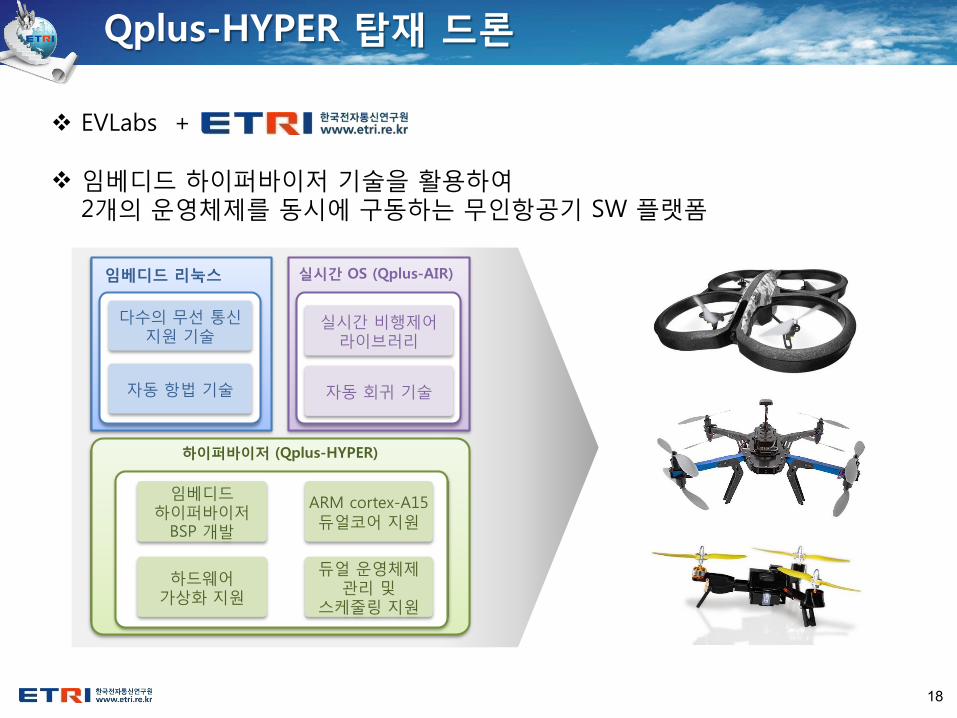
Qplus-HYPER 탑재 드론
� EVLabs +
� 임베디드 하이퍼바이저 기술을 활용하여2개의 운영체제를 동시에 구동하는 무인항공기 SW 플랫폼
하이퍼바이저 (Qplus-HYPER)
임베디드 리눅스 실시간 OS (Qplus-AIR)
임베디드하이퍼바이저
BSP 개발
ARM cortex-A15듀얼코어 지원
하드웨어가상화 지원
듀얼 운영체제관리 및
스케줄링 지원
실시간 비행제어라이브러리
자동 회귀 기술
다수의 무선 통신지원 기술
자동 항법 기술

19
ITS
GCS
HILS
통합비행제어컴퓨터
ITS 콘솔
비싼 무인기 시험 환경
20
값싼 무인기 시험 환경
� FlightGear Flight Simulator- Flight Dynamics Model - World Scenary Database
. 20,000 Airports
. Runway, Taxiway, Lighting, …. - Sky Model
. Sun, Moon, Stars, … - Aircraft Model
� MS FlightSimulator� X-Plane � LO-MAC � …
21
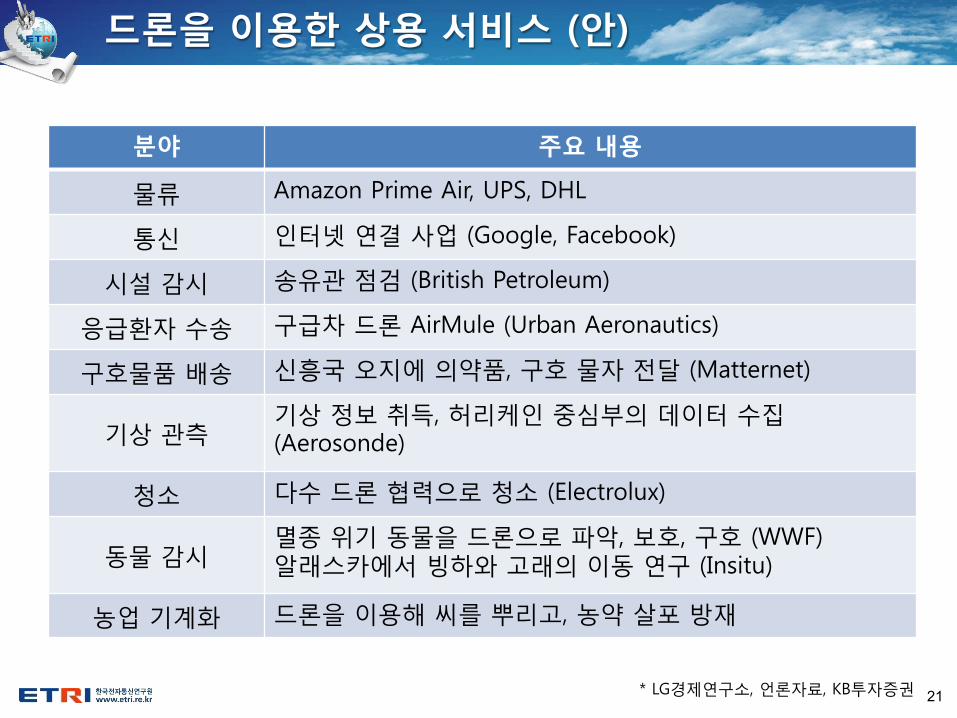
드론을 이용한 상용 서비스 (안)
분야 주요 내용
물류 Amazon Prime Air, UPS, DHL
통신 인터넷 연결 사업 (Google, Facebook)
시설 감시 송유관 점검 (British Petroleum)
응급환자 수송 구급차 드론 AirMule (Urban Aeronautics)
구호물품 배송 신흥국 오지에 의약품, 구호 물자 전달 (Matternet)
기상 관측기상 정보 취득, 허리케인 중심부의 데이터 수집(Aerosonde)
청소 다수 드론 협력으로 청소 (Electrolux)
동물 감시멸종 위기 동물을 드론으로 파악, 보호, 구호 (WWF)알래스카에서 빙하와 고래의 이동 연구 (Insitu)
농업 기계화 드론을 이용해 씨를 뿌리고, 농약 살포 방재
* LG경제연구소, 언론자료, KB투자증권
22
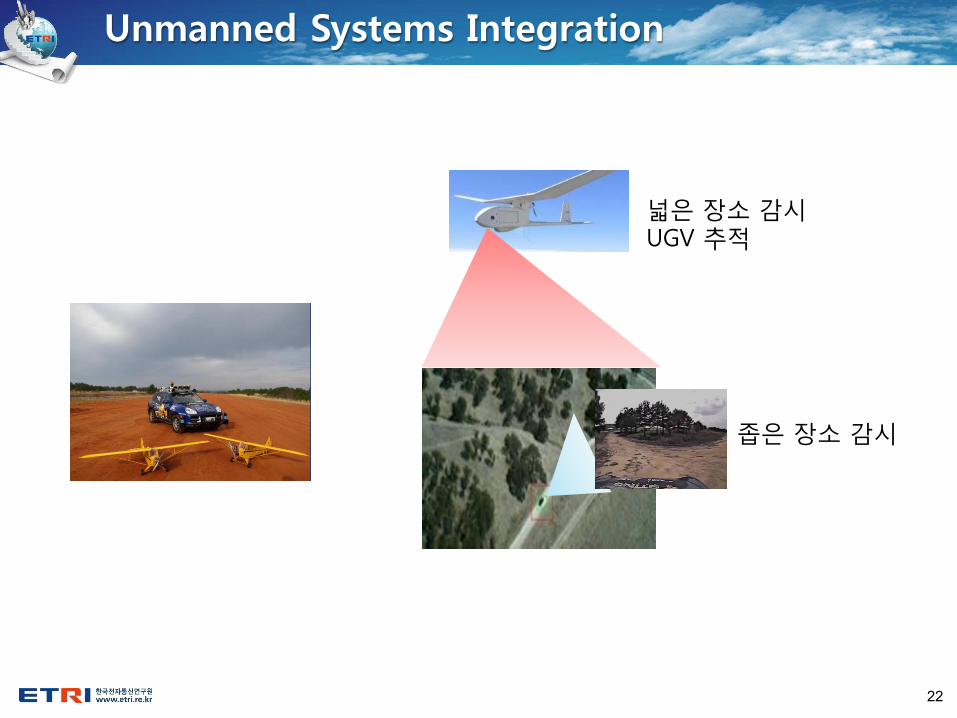
Unmanned Systems Integration
넓은 장소 감시UGV 추적
좁은 장소 감시
23
무인기 플랫폼 발전 방향 및 예상
� 무인기 플랫폼 확산- 공통 기술의 대중화- 탑재체 (Payload) 다양화- 공통 안전기술 기본 제공
• Fault-tolerant • Fault Isolation • Fail safe (출발점 귀환, 비상 착륙)
- 보안 기술 기본 제공• Security Isolation
� 군용 무인기 시장과 민간용 무인기 시장의 충돌 및 협력- 중대형 vs 소형 무인기
- 인허가 규제