تحسين استجابة المنشآت الزلزالية بوساطة أجهزة التحكم...
DESCRIPTION
SEMI ACTIVE CONTROLTRANSCRIPT
لجمهورية العربية السورية، دمشقا
جامعة دمشق، المعهد العالي للبحوث والدراسات الزلزالية
قسم الهندسة االنشائية الزلزالية
تحسين استجابة المنشآت الزلزالية بوساطة
أجهزة التحكم شبه اإليجابي
اطروحة اعدت كجزء من متطلبات الحصول على درجة الماجستير
في الهندسة االنشائية الزلزالية
في المعهد العالي للبحوث والدراسات الزلزالية، جامعة دمشق
إعداد يزن محمود الغصين
المشرف المشارك الدكتور المشرف
د. م. تركي طبق د. م. هاله توفيق حسن
الدراسات والبحوث العلمية مركز العالي للبحوث والدراسات الزلزاليةالمعهد
2015دمشق
الجمهورية العربية السورية، دمشق
جامعة دمشق، المعهد العالي للبحوث والدراسات الزلزالية
قسم الهندسة االنشائية الزلزالية
تحسين استجابة المنشآت الزلزالية بوساطة أجهزة التحكم شبه اإليجابي
اطروحة اعدت كجزء من متطلبات الحصول على درجة الماجستير في الهندسة االنشائية الزلزالية
في المعهد العالي للبحوث والدراسات الزلزالية، جامعة دمشق
إعداد يزن محمود الغصين
يعتمد من لجنة الممتحنين:
عضوًا رئيساً سمارةالأحمد محمد الدكتور المهندس /
كلية الهندسة المدنية/جامعة دمشق استاذ في قسم الهندسة االنشائية/
اً عضوًا مشرف هاله توفيق حسنة / الدكتورة المهندس
جامعة دمشق /المعهد العالي للبحوث والدراسات الزلزالية/ الزلزالية في قسم الهندسة االنشائية مدرس
عضوًا ربيع الصفديالدكتور المهندس/
جامعة دمشق / كلية الهندسة المدنيةفي قسم الهندسة االنشائية/ مدرس
I
:الملخص
ميم ومساهمتها التص مقاومه للزالزل الشديدة، وبالرغم من تطور اساليب أبنيةيشهد العالم طلبًا متزايدًا على
تخفيض المخاطر الزلزالية وكودات التصميم، ال زلنا نعاني من الخسائر البشرية واالقتصادية خاصه في األبنية في
امة )مثل المشافي وابنيه المصارف ...(. لذلك يسعى الباحثون دوما إليجاد حلول أفضل لتحسين االستجابة اله
الزلزالية للمنشآت وتقليل مخاطر الزالزل.
( كحل ذكي Semi Active Controlتأتي طريقه التحكم شبه االيجابي باالستجابة الديناميكية للمنشآت )
الل وضع مخمدات يمكن التحكم بخواصها )من خالل حاسب وبرنامج تحكم( في ومتكّيف لهذه المشكلة، من خ
ال تتطلب هذه و ،اماكن محدده في البناء، وبالتالي التحكم باستجابة البناء في الوقت الحقيقي للحركة الديناميكية
كات(، كية ومحر المخمدات طاقة كهربائية عالية مقارنة مع التحكم االيجابي )الذي يتطلب وضع مكابس هيدرولي
ويمكن ضبطها للتكّيف مع الحمل الديناميكي الذي يخضع له المبنى مما يجعلها الحل االمثل لتحسين استجابة
المباني التي ال يمكن تحسين استجابتها بالعزل الزلزالي )كاألبنية العالية(.
ض للزالزل بنية التي تتعر أثر استخدام التحكم شبه اإليجابي على استجابة األتقّيم ة هذه الدراستم في
ي التحكم الخط ةيتم التحكم بها بوساطة نظريوالتي (، MR damperباستخدام المخمدات الهيدروليكية المغناطيسية )
بدون مخمدات أبنية(، ثم مقارنة النتائج مع 2.5A~0(، بأوامر كهربائية تتغير في المجال )Matlabوبرنامج )
(Uncontrolled و ،)ب مزودة أبنية( التحكم السلبي التقليديPassive control حيث تعمل المخمدات طوال الوقت )
وهو مشروع يهدف الى جمع ،(SACمشروع ) ةبنيألمن خالل دراسة تحليلية ، وذلك (2.5Aبأمر كهربائي ثابت )
وبعض سجالت الزالزل ةمعياري ةبنيأ ةاستجابة المنشآت من خالل مجموع الجهد المبذول في دراسة أساليب تحسين
.النتائج ةعليها لمقارنبنية تم دراسة األ التي
II
لألبني ة ةنموذجي ي ةبنط ابق، وه ي أ 20 ، 9 ، 3 ف ي ه ذا البح ث اس تخدام ابني ة م ن مت
ي تم انش ائهاوب الرغم ان ه ل م ،العالي ة االرتف اع لمنطق ة ل وس انجل يس، كاليفورني االمنخفض ة والمتوس طة و
أساس اً ق د أعط تف (SAC)لدراس ات ةمعياري ي ةبنا االك ود األميرك ي لألبني ة، ولكونه حق ق ش رو ت فإنه ا
اربع ة عل ىالمط ور ف ي ه ذا البح ث (∞Hوت م اختب ار اداء الم تحكم )، أوس ع لمقارن ة نت ائج ه ذه الدراس ة
مش تقة منه ا مس تخدمة 6، ووك وبي ، ون ورث رد ،وهاش ينوهي ،س جالت زلزالي ة أساس ية ه ي الس نترو
منطق ه زلزالي ة ه زات زلزالي ة معياري ة ل زالزل ق د ت ثر عل ى( وه ي تش كل س جالت SACروع )ف ي مش
، near and far field)ف ي خمس ين ع ام ول زالزل قريب ة او بعي دة الموق ع ) %2و % 10و %50باحتم ال
نت ائج دقيق ة ويعط ي ،ه ذه ال زالزل تح ت ال تحكم ش به اإليج ابي ف ي نظ ام يزي د م ن دق ة اداء الم تحكم
وموثوقة في تحسين االستجابة الديناميكية.
فاعلي ه ال تحكم ش به اإليج ابي ف ي تحس ين اس تجابة المبن ى م ن الدراس ة التحلي ة ت نت اء أظه ر
المفاص ل وتقلي ل تش كل ،واالنزي اي النس بي ب ين الطواب ق ،خ الل تقلي ل االنتق ال االعظم ي ألعل ى البن اء
المخ اطر حس ين اس تجابة األبني ة وتخفي فاللدن ة مم ا يثب ت أّن ال تحكم ش به اإليج ابي ه و ح ل مه م لت
الزلزالية على األبنية.
ية.مخمدات الهيدروليكية المغناطيس ،ستجابة الزلزالية لألبنيةاالالتحكم شبه اإليجابي، الكلمات المفتاحية:
III
الفهرس:
I ......................................................................................................... :الملخص
III .........................................................................................................:الفهرس
VII................................................................................................ :الجداول الئحة
VIII............................................................................................... :األشكال الئحة
XIV ................................................................................ :والمصطلحات الرموز الئحة
2 ........................................................................................... المقدمة األول الفصل
2 ....................................................................................................:مقدمة .1 1
2 ........................................................................................... :البحث مشكلة .2 1
4 ............................................................ (:Research Objectives) البحث أهداف .3 1
4 .................................................................. (:Scope of Work) البحث خطوات .4 1
5 .........................................................(:Thesis Outlines) للرسالة العامة الخطو .5 1
7 ...............................................................السابقة والتقنيات األبحاث مراجعة الثاني الفصل
7 ....................................................................................................:مقدمة .1 2
8 ..........................................................................:المنشآت باستجابة التحكم أنواع .2 2
10 ................................................................ :المنشآت باستجابة التحكم أجهزة. 1 2 2
21 ................................................................................. :المتحكمات أنواع. 2 2 2
26 ..................................................................................:1_ المرجعية الدراسة .3 2
27 ............................ :المرجعية الدراسة من المشتق التحليل في المستخدم المخمد نموذ . 1 3 2
30 ........................................................................................:2_ المرجعية الدراسة
34 ................................................................................ :المرجعية الدراسة نتائج .4 2
36 ................................................................ ماتالب باستخدام المتحكم بناء الثالث الفصل

IV
36 ..................................................................................................:مقدمة .1 3
36 ........................................................................... :المتحكم تصميم مشاكل أهم .2 3
36 .......................................................................:المتنوعة الديناميكية االثارة .1 2 3
37 ................................................................. :والحساسات القياس آالت حدود. 2 2 3
37 ...............................................................:الالخطي الديناميكي المخمد نظام. 3 2 3
37 ................................................ (:MR) مخمد في( Hysteresis) التخلفية أثر. 4 2 3
38 ...........................................................................:للمشغل الزمني التأخر. 5 2 3
38 ................................... (:Uncertain parameters) الم كدة غير البناء بارامترات .6 2 3
38 ...................................................................... :الماتالب باستخدام المتحكم بناء .3 3
39 ..............................:المخمدات مع االنشائي للنظام الديناميكية الحركة معادالت كتابة. 1 3 3
40 ................................ :الحالة فضاء شكل الى التفاضلي الشكل من المعادالت تحويل. 2 3 3
42 .............................................................. :الحالة فضاء في التمثيل ايجابيات .3 3 3
43 ................................................................ :الحالة فضاء في التمثيل سلبيات. 4 3 3
40 ...............................................................:الحالة فضاء في التمثيل معادالت .5 3 3
42 ............................ :الحالة فضاء معادالت الى الحركة معادالت من التحويل معادالت. 6 3 3
42 .............................................................................. :والرصدّية التحكمّية .7 3 3
44 ..........................................................................:وحسابه المتحكم عمل طريقة .4 3
45 ......................................................................:النظام أقطاب تغيير طريقه. 1 4 3
46 .................................................................:الخطي التربيعي المتحكم طريقة. 2 4 3
46 ................................................................................... :الراصد حساب. 3 4 3
47 .......................................................................... :(LQR) متحكم تطوير .4 4 3
V
49 ............................................................ :الدراسة في المستخدم( ∞𝚮) متحكم. 5 4 3
55 .......................................................... :(Clipped optimal) متحكم إضافة .6 4 3
SAP2000 ..................................... 57 و MATLAB باستخدام التحليلية الدراسة الرابع الفصل
57 ..................................................................................................:مقدمة .1 4
57 .............................................................................. :المستخدمة األبنية نماذ .2 4
57 ............................ (:Story Benchmark Building-3) طوابق 3 من معدني بناء. 1 2 4
58 ............................ (:Story Benchmark Building-9) طوابق 9 من معدني بناء. 2 2 4
60 ......................... (:Story Benchmark Building-20) طابق 20 من معدني بناء. 3 2 4
62 .............................................................. :الماتالب في النموذ وتحليل بناء. 4 2 4
65 .................................. (:Nonlinear Analysis Tool) في الالخطي التحليل أداة. 5 2 4
66 .............................................................:التحليل في المستخدمة الزلزالية السجالت .3 4
68 .......................................... (:SAP2000)و( MATLAB) بواسطة المطور البرنامج .4 4
69 ......................................(:SAP2000)و المرجعية الدراسة مع بالمقارنة النموذ تحقيق .5 4
72 .............................................................................. النتائج مناقشة الخامس الفصل
72 ..................................................................................................:مقدمة .1 5
72 ................................................................................... :طوابق 3 بناء نتائج .2 5
72 ............... :السلبي بالتحكم مزود مبنى مع مخمدات بدون ( story-3) مبنىال نتائج مقارنة .1 2 5
75 ................... :مختلفة تيار بشدات السلبي بالتحكم المزود( story-3) مبنىال نتائج مقارنة. 2 2 5
76 .......... :المرجعية المتحكمات مع( LQR) بالمتحكم المزود( story-3) مبنىال نتائج مقارنة .3 2 5
78 ..... :السلبي بالتحكم مزود مبنى مع( ∞H) بالمتحكم المزود( story-3) مبنىال نتائج مقارنة. 4 2 5
91 .....................................................:للمخمدات مختلف توزيع مع طوابق 3 بناء نتائج .3 5

VI
91 ........................................................................ :األول الطابق في المخمد. 1 3 5
92 ...................................................................... :األخير الطابق في المخمد. 2 3 5
93 ..............................................................:والثالث الثاني الطابقين في المخمد. 3 3 5
96 ................................................................................... :طوابق 9 بناء نتائج .4 5
96 ............... :السلبي بالتحكم مزود مبنى مع مخمدات بدون ( story-9) مبنىال نتائج مقارنة .1 4 5
96 ..... :االيجابي شبه بالتحكم المبنى مع السلبي بالتحكم المزود( story-9) مبنىال نتائج مقارنة .2 4 5
103 .................................................................................:طابقا 20 بناء نتائج .5 5
103 ............. :السلبي بالتحكم مزود مبنى مع مخمدات بدون ( story-9) مبنىال نتائج مقارنة .1 5 5
104 . :االيجابي شبه بالتحكم المبنى مع السلبي بالتحكم المزود( story-20) مبنىال نتائج مقارنة .2 5 5
110 .............................................................. :االرتفاع باختالف األبنية نتائج مقارنة .6 5
112 ............................................................... والتوصيات النتائج ملخص: السادس الفصل
112 ...................................................................................... :النتائج ملخص .1 6
114 ........................................................................ :المستقبلي والعمل التوصيات .2 6
115 ......................................................................................................:المراجع
121 .....................................................................................................:المالحق
Abstract:.................................................................................................. 122

VII
الئحة الجداول:
13 ....(Spencer Jr and Soong 1999. )2000 عام قبل األبنية في اإليجابي التحكم أجهزة استخدام(: 1-2) الجدول
68 .............. (testing 2011) في طوابق 3 لبناء السلبي والتحكم االيجابي شبه التحكم نتائج مقارنة(: 1-4) الجدول
68 ...السنترو باستخدام البحث مع( Ohtori et al. 2004) في تحكم بدون المعيارية األبنية نتائج مقارنة(: 2-4) الجدول
70 ................(.SAP2000) و والماتالب 1_المرجعية الدراسة: للنماذ السلبي التحكم نتائج مقارنة(: 3-4) الجدول
77 .... .السنتروب( testing 2011) والمرجعية جديدة تحكم استراتيجيات على طوابق الثالث لمبنىاا نتائج(: 1-5) الجدول
89 ......................مختلفة وزالزل تحكم استراتيجيات على طوابق الثالث لمبنى الطوابق انتقال نتائج(: 2-5) الجدول
90 .........................المختلفة التحكم استراتيجيات باستخدام العشرة للزالزل االنتقاالت نتائج متوسط(: 3-5) الجدول
90 .................... .المختلفة التحكم استراتيجيات باستخدام العشرة للزالزل األداء معايير نتائج متوسط(: 4-5) الجدول
94 ............................ .مختلف مخمدات توزيع باستخدام طوابق الثالث مبنى طوابق انتقال نتائج: (5-5) الجدول
94 .. .مختلف مخمدات توزيع باستخدام طوابق 3 لمبنى التحكم استراتيجيات باستخدام األداء معايير نتائج: (6-5) الجدول
101 ............................مختلفة تحكم استراتيجيات باستخدام طوابق 9 مبنى طوابق انتقاالت نتائج :(7-5) الجدول
102 .......... العشرة التحليل زالزل باستخدام المدروسة التحكم الستراتيجيات االعظمية االنتقاالت متوسط :(8-5) الجدول
102 ...................طوابق 9 لمبنى زالزل عشر على التحكم الستراتيجيات األداء معايير نتائج متوسط :(9-5) الجدول
108 .......................... المختلفة التحكم استراتيجيات وفق طابق العشرين لمبنى الطوابق انتقاالت(: 10-5) الجدول
109 ...................... طابق 20 لمبنى المدروسة التحكم الستراتيجيات االعظمية االنتقاالت متوسط(: 11-5) الجدول
109 ................ طابق 20 لمبنى زالزل عشر على التحكم الستراتيجيات األداء معايير نتائج متوسط(: 12-5) الجدول
VIII
الئحة األشكال:
7 .............................. .اإليجابي الكتلة بمخمدات المزود( story Kyobashi Seiwa-11) بناء(: 1-2) الشكل
8 ........................................................................ المنشآت باستجابة التحكم آليات(: 2-2) الشكل
10 ............................ (Spencer Jr and Soong 1999. )اإليجابي شبه التحكم عمل توضيح(: 3-2) الشكل
11 .......................(Spencer Jr and Soong 1999. )االيجابي التحكم لمكونات توضيحي رسم(: 4-2) الشكل
12 ......................................(Villamizar Mejia 2005. )النشط الكتلة مخمد عمل طريقة(: 5-2) الشكل
14 ................................ (Villamizar Mejia 2005. )المضبو السائل مخمد عمل طريقة( : 6-2) الشكل
15 .......................... .مواصالت جسر في اإليجابي شبه الفوهة متغير هيدروليكي مخمد استخدام( : 7-2) الشكل
16 .......... مختلفة تحكم استراتيجيات باستخدام( Symans and Constantinou 1997) دراسة نتائج( : 8-2) الشكل
17 .................. (SAHD( )Kurata et al. 2000) بمخمدات المزود Kajima Shizuoka بناء( : 9-2) الشكل
19 ..........................................(20t_MR( .)Spencer Jr et al. 1997) مخمد أجزاء( : 10-2) الشكل
24 ............................................. (Dyke 1996. )(Clipped optimal) متحكم عمل( : 11-2) الشكل
27 ................................... (story building-3) بناء في( MR) لمخمدات الهجينة الدراسة(: 12-2) الشكل
28 ..........(Lord Corporation 200kN_MR damper( )Christenson et al. 2007) مخمد(: 13-2) الشكل
28 ............................. (Christenson et al. 2007) المغناطيسي الهيدروليكي( MR) سائل(: 14-2) الشكل
29 ....................... (Christenson et al. 2007) مختلفة تيار شدة على( MR) مخمد استجابة(: 15-2) الشكل
29 ................................ (Christenson et al. 2007.)وبارومتراته الرياضي المخمد نموذ (: 16-2) الشكل
30 .................................. (MR( )Jiang 2012) لمخمد والتحليلية التجريبية النتائج مقارنة( : 17-2) الشكل
31 ................................ (story prototype building_3) لبناء( RTHS) التجربة نموذ (: 18-2) الشكل
31 .................................... .التجربة في المستخدم( story prototype building_3) بناء(: 19-2) الشكل
32 .................................. (.story prototype building_3) لبناء التجريبية الدراسة إطار: (20-2) الشكل
32 ............................. (.MR) بمخمدات مزودة طوابق ثالث لبناء المرجعية( RTHS) تجربة(: 21-2) الشكل
33 .......... .والثاني األول الطابقين في( MR) بمخمدي مزود طوابق 9 لبناء( RTHS) تجربة طريقة(: 22-2) الشكل
IX
33 ............ والثاني األول الطابقين في( MR) بمخمدي مزود طوابق 9 لبناء( RTHS) تجربة نتائج(: 23-2) الشكل
34 ...(story-9) مبنى وتسارعات وسرع النتقاالت (RTHS) والتجريبية( SIM) التحليلية النتائج مقارنة(: 24-2) الشكل
39 ............................................ (Cheng et al. 2010) الطابق مستوي على الم ثرة القوة(: 1-3) الشكل
41 ............................................................. الحالة فضاء لمعادالت الديناميكي النظام(: 2-3) الشكل
43 ........................................................... الحالة وفضاء والخر الخل فضاءات ترابط(: 3-3) الشكل
45 ................................................................... .الخطي للمتحكم الديناميكي النظام(: 4-3) الشكل
46 ..................................................... (.State Estimator) للراصد الديناميكي النظام(: 5-3) الشكل
47 ............................................................ ومتحكم راصد مع للبناء الديناميكي النظام(: 6-3) الشكل
48 ............................................................................ .المطور( LQR) متحكم(: 7-3) الشكل
49 ............................................. (Guide 1998) .متحكم مع األساسي الديناميكي النظام(: 8-3) الشكل
50 ..................... (Guide 1998) (.controller ∞H) متحكم كتابة اجل من التقليدي البناء نظام(: 9-3) الشكل
50 ........................... (.H∞ controller) متحكم كتابة اجل من الديناميكي البناء نظام تطوير(: 10-3) الشكل
51 ..... .التقليدي (Wground Acc) الزلزالي التسارع وزن لتابع( Bode diagram) الترددي التضخيم(: 11-3) الشكل
52 ........ (.Wground Acc) الزلزالي التسارع وزن تابع لوزن ( Bode diagram) الترددي التضخيم(: 12-3) الشكل
53 ............... (.W Actuator) المشغل فعل رد وزن لتابع( Bode diagram) الترددي التضخيم(: 13-3) الشكل
53 ................ (.W𝑓𝑙𝑜𝑜𝑟 Acc) الطوابق تسارع وزن لتابع( Bode diagram) الترددي التضخيم(: 14-3) الشكل
54 .... (.Wfloor dis) الزلزالي التسارع وزن تابع لوزن ( Bode diagram) الترددي الزلزالي التضخيم(: 15-3) الشكل
55 ......................................... (Dyke et al. 1996a) (.Clipped optimal) متحكم( : 16-3) الشكل
55 .................................................... (Matlab Simulink) برنامج في المتحكم بنية(: 17-3) الشكل
58 ............................................................................ . المعياري طوابق 3 بناء(: 1-4) الشكل
59 ...............................................................................المعياري طوابق 9 بناء(: 2-4) الشكل
61 ............................................................................. المعياري طوابق 20 بناء(: 3-4) الشكل
63 ....................... .المعيارية لالبنية األخير الطابق النتقالوتسارع الزلزالي للتضخيم الطيفية النسب(: 4-4) الشكل

X
64 ....................................................... .المعيارية لالبنية األولى الثالثة االهتزاز أنما (: 5-4) الشكل
65 .............................. . الخطية ثنائي تخلفي ونموذ طوابق 3 مبنى في اللدنة المفاصل أماكن(: 6-4) الشكل
66 ...................................................... التحليل في المستخدمة الرئيسية الزالية السجالت(: 7-4) الشكل
67 ........................................................ بالتحليل المستخدمة الزلزالية السجالت خواص(: 8-4) الشكل
67 ......................................................... (Stander deviation) المعياري االنحراف: )9-4) الشكل
69 ................................................................... .المطور والماتالب الساب نموذ :)10-4) الشكل
73 ............................................................. (.story-3) مبنىال في المخمدات توزيع(: 1-5) الشكل
73 ........ .السنترو على السلبي بالتحكم مبنى مع مخمدات بدون ( story-3) العلوي الطابق نتائج مقارنة(: 2-5) الشكل
على( Cdb_3)المبنى نتائج مع( Udb_3) مبنى لطوابق النس بي واالنتقال االعظمي التس ارع نتائج مقارنة(: 3-5) الش كل
74 ............................................................................................... (El_Centro) زلزال
75 ......................... .الكهربائي التيار شدة بتغيير طوابق 3 مبنى انتقاالت على السلبي التحكم أثر(: 4-5) الشكل
76 .......... (.MR) لمخمد الكهربائي التيار شدة بتغّير( Hysteresis loop) التخلفية الحلقة شكل تغّير(: 5-5) الشكل
تراتيجياتواالس المطورة التحكم اس تراتيجيات باس تخدام طوابق الثالث لمبنى الطوابق انتقال نتائج مقارنة(: 6-5) الش كل
77 ......................................................................... .السنترو وزالزل( testing 2011) المرجعية
وزالزل لمقارنةل الس لبي بالتحكم مقارنةً التحكم اس تراتيجيات على طوابق الثالث لمبنى الطوابق انتقال نتائج(: 7-5) الش كل
78 ............................................................................................................ .السنترو
79 . (Cdb_3) ومبنى( Pdb_3)طوابق الثالث لمبنى األخير الطابق وتسارع النتقال الزمني السجل مقارنة(: 8-5) الشكل
(Cdb_3) ومبنى( Pdb_3) للمبنى االعظمي الطابقي والتس ارع االعظمي النس بي االنتقال لنتائج مقارنة(: 9-5) الش كل
80 ....................................................................................................السنترو باستخدام
باس تخدام الس نترو زلزال على( Cdb_3) و( Pdb_3) لمبنى الطابقي والتس ارع االنتقال نتائج مقارنة(: 10-5) الش كل
81 .......................................................................................................(∞H) متحكم
باستخدام هاشينوهي زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الطابقي والتسارع االنتقال نتائج مقارنة(: 11-5) الشكل
82 .......................................................................................................(∞H) متحكم
XI
ري د نورث زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الط ابقي والتس ارع االنتق ال نت ائج مق ارن ة(: 12-5) الش ك ل
83 ............................................................................................ .(∞H) متحكم باستخدام
باس تخدام كوبي زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الطابقي والتس ارع االنتقال نتائج مقارنة(: 13-5) الش كل
84 .......................................................................................................(∞H) متحكم
باس تخدام الس نترو زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الطابقي والتس ارع االنتقال نتائج مقارنة (:14-5) الش كل
85 ....................................................................................................... .(2H) متحكم
باستخدام هاشينوهي زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الطابقي والتسارع االنتقال نتائج مقارنة(: 15-5) الشكل
86 ....................................................................................................... .(2H) متحكم
ري د نورث زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الط ابقي والتس ارع االنتق ال نت ائج مق ارن ة(: 16-5) الش ك ل
87 ............................................................................................. .(2H) متحكم باستخدام
باس تخدام كوبي زلزال على( Cdb_3) ومبنى( Pdb_3) لمبنى الطابقي والتس ارع االنتقال نتائج مقارنة(: 17-5) الش كل
88 ....................................................................................................... .(2H) متحكم
90 ....................... .المختلفة التحكم استراتيجيات باستخدام العشرة للزالزل االنتقاالت نتائج متوسط(: 18-5) الشكل
وزلزال لتحكما اس تراتيجيات على األول الطابق في والمخمدات طوابق الثالث لمبنى والتس ارع االنتقال نتائج(: 19-5) الش كل
91 ............................................................................................................ .السنترو
لتحكما اس تراتيجيات على األخير الطابق في والمخمدات طوابق الثالث لمبنى والتس ارع االنتقال نتائج (:20-5) الش كل
92 ..................................................................................................... .السنترو وزلزال
تراتيجياتاس على والثالث الثاني الطابقين في والمخمدات طوابق الثالث لمبنى والتس ارع االنتقال نتائج(: 21-5) الش كل
93 .............................................................................................. .السنترو وزلزال التحكم
95 ............................... .للمخمدات مختلفة بتوزيعات طوابق الثالث لمبنى النسبي االنزياي قيم(: 22-5) الشكل
95 ........... .السلبي للتحكم نسبةً للمخمدات مختلفة بتوزيعات طوابق الثالث لمبنى النسبي االنزياي قيم(: 23-5) الشكل
96 ... .مخمدات بدون المبنى مع بالمخمدات المزود طوابق 9 لمبنى االخير الطابق وتسارع انتقال مقارنة(: 24-5) الشكل
97 ... .االيجابي شبه والتحكم السلبي بالتحكم المزود طوابق 9 لمبنى االخير الطابق وتسارع انتقال مقارنة(: 25-5) الشكل

XII
ش به والتحكم الس لبي بالتحكم المزود طوابق 9 لمبنى الطوابق األعظمي والتس ارع النس بي االنتقال مقارنة(: 26-5) الش كل
97 ........................................................................................................... .االيجابي
التحكم اس تراتيجيات على طوابق 9 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 27-5) الش كل
98 ................................................................................................ .هاشينوهي باستخدام
التحكم اس تراتيجيات على طوابق 9 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 28-5) الش كل
99 ................................................................................................ .رد نورث باستخدام
التحكم اس تراتيجيات على طوابق 9 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 29-5) الش كل
100 .................................................................................................... .كوبي باستخدام
في ةالعش ر الزالزل تس جيالت باس تخدام المدروس ة التحكم الس تراتيجيات االعظمية االنتقاالت متوس ط(: 30-5) الش كل
102 .............................................................................................................التحليل
103 . .مخمدات بدون المبنى مع بالمخمدات المزود طابق 20 لمبنى األخير الطابق وتسارع انتقال مقارنة(: 31-5) الشكل
التحكم اس تراتيجيات على طابق 20 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 32-5) الش كل
104 ............................................................................................ .السنترو زلزال باستخدام
التحكم اس تراتيجيات على طابق 20 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 33-5) الش كل
105 ......................................................................................... .هاشينوهي زلزال باستخدام
التحكم اس تراتيجيات على طابق 20 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 34-5) الش كل
106 ....................................................................................... . ريد نورث زلزال باستخدام
التحكم اس تراتيجيات على طوابق 20 المبنى لطوابق األعظمي والتس ارع النس بي واالنتقال االنتقال مقارنة(: 35-5) الش كل
107 .............................................................................................. .كوبي زلزال باستخدام
20 مبنىل العش رة التحليل زالزل باس تخدام المدروس ة التحكم الس تراتيجيات االعظمية االنتقاالت متوس ط(: 36-5) الش كل
109 .............................................................................................................. طابق
باس تخدام التحكم اس تراتيجيات على( طابقاً 20و طوابق 9و طوابق 3) لألبنية األعظمي االنتقال مقارنة(: 37-5) الش كل
110 ..................................................................................................... .السنترو زلزال
XIII
زلزال باس تخدام الس لبي للتحكم منس وباً ( طابقاً 20و طوابق 9و طوابق 3) لألبنية االعظمي االنتقال مقارنة(: 38-5) الش كل
110 ........................................................................................................... .السنترو
التحكم اس تراتيجيات على( طابقاً 20و طوابق 9و طوابق 3) لألبنية األعظمي النس بي االنزياي مقارنة(: 39-5) الش كل
111 ............................................................................................ .السنترو زلزال باستخدام
للتحكم منس وباً ( طابقاً 20و طوابق 9و طوابق 3) لألبنية االعظمي النس بي االنزياي مقارنة(: 40-5) الش كل
111 ................................................................................. .السنترو زلزال باستخدام السلبي
XIV
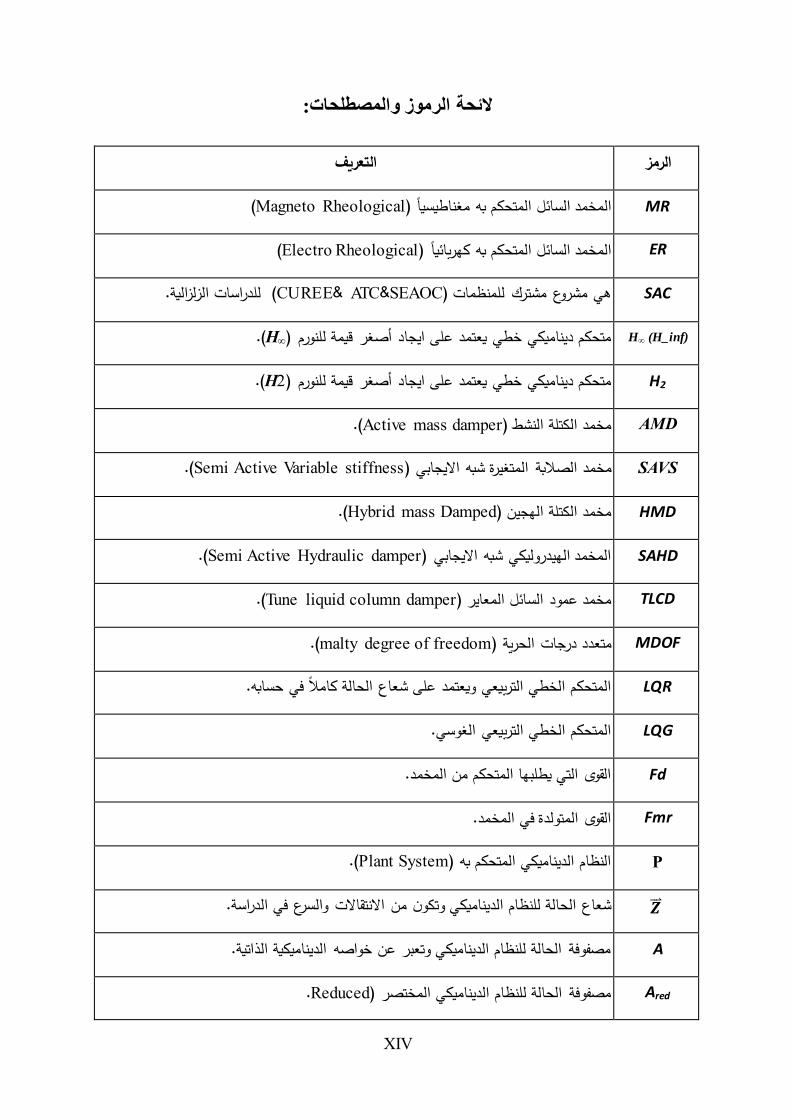
:والمصطلحات الئحة الرموز
الرمز التعريف
MR (Magneto Rheological) السائل المتحكم به مغناطيسياً المخمد
ER (Electro Rheological) اً كهربائيالسائل المتحكم به المخمد
SAC ( للدراسات الزلزالية.SEAOC& ATC&CUREE)هي مشروع مشترك للمنظمات
H∞ (H_inf) (.H∞قيمة للنورم ) أصغرمتحكم ديناميكي خطي يعتمد على ايجاد
2H (.2Hقيمة للنورم ) أصغرمتحكم ديناميكي خطي يعتمد على ايجاد
AMD .(Active mass damperمخمد الكتلة النشط )
SAVS (.Semi Active Variable stiffnessالصالبة المتغيرة شبه االيجابي )مخمد
HMD (.Hybrid mass Dampedمخمد الكتلة الهجين )
SAHD (.Semi Active Hydraulic damperالمخمد الهيدروليكي شبه االيجابي )
TLCD (.Tune liquid column damperمخمد عمود السائل المعاير )
MDOF (.malty degree of freedomدرجات الحرية )متعدد
LQR المتحكم الخطي التربيعي ويعتمد على شعاع الحالة كاماًل في حسابه.
LQG المتحكم الخطي التربيعي الغوسي.
Fd القوى التي يطلبها المتحكم من المخمد.
Fmr القوى المتولدة في المخمد.
P (.Plant Systemالنظام الديناميكي المتحكم به )
�⃑⃑� شعاع الحالة للنظام الديناميكي وتكون من االنتقاالت والسرع في الدراسة.
A .مصفوفة الحالة للنظام الديناميكي وتعبر عن خواصه الديناميكية الذاتية
Reduced. redAمصفوفة الحالة للنظام الديناميكي المختصر )
XV
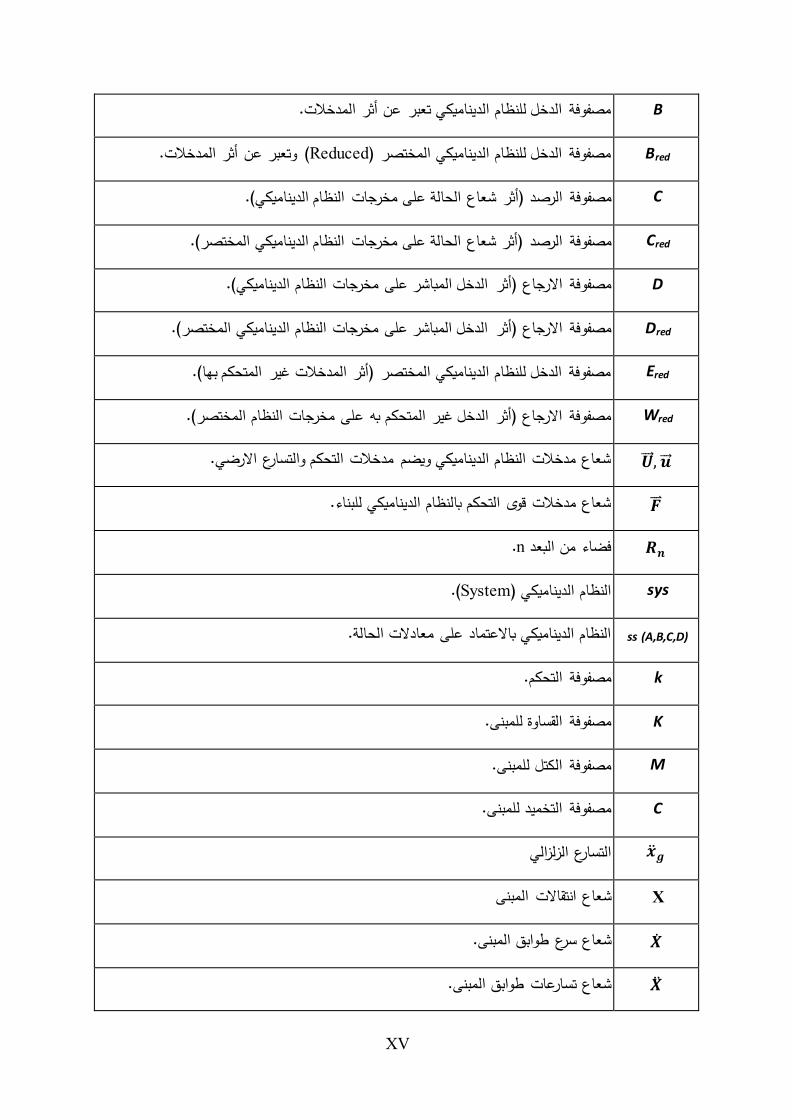
B أثر المدخالت. مصفوفة الدخل للنظام الديناميكي تعبر عن
redB ( وتعبر عن أثر المدخالت.Reducedمصفوفة الدخل للنظام الديناميكي المختصر )
C شعاع الحالة على مخرجات النظام الديناميكي(. )أثر الرصد مصفوفة
redC )أثر شعاع الحالة على مخرجات النظام الديناميكي المختصر(. الرصد مصفوفة
D الدخل المباشر على مخرجات النظام الديناميكي(. )أثرمصفوفة االرجاع
redD الدخل المباشر على مخرجات النظام الديناميكي المختصر(. )أثرمصفوفة االرجاع
redE .غير المتحكم بها( مصفوفة الدخل للنظام الديناميكي المختصر )أثر المدخالت
redW على مخرجات النظام المختصر(. غير المتحكم بهمصفوفة االرجاع )أثر الدخل
, �⃑⃑� شعاع مدخالت النظام الديناميكي ويضم مدخالت التحكم والتسارع االرضي. �⃑⃑�
�⃑⃑� شعاع مدخالت قوى التحكم بالنظام الديناميكي للبناء.
n. 𝑹𝒏فضاء من البعد
sys (.Systemالنظام الديناميكي )
ss (A,B,C,D) معادالت الحالة.النظام الديناميكي باالعتماد على
k مصفوفة التحكم.
K مصفوفة القساوة للمبنى.
M مصفوفة الكتل للمبنى.
C مصفوفة التخميد للمبنى.
�̈�𝒈 التسارع الزلزالي
X شعاع انتقاالت المبنى
�̇� شعاع سرع طوابق المبنى.
�̈� شعاع تسارعات طوابق المبنى.

XVI
�̂� المستقرأ.شعاع حالة المبنى المقدر أو
𝜻𝒊 .(𝒊) التخميد الموافق للنمط
𝒊∅ .(𝒊) الموافق للنمط
∞‖𝑷‖ ه من معادالت النظام الديناميكي.( يتم حساب∞Hنورم )
𝝎𝒊 .(𝒊) التردد الموافق للنمط
𝒆𝒊 .(𝒊لشعا المخرجات رقم )الموافق
e العدد النبري.
det محدد المصفوفة.
المصطلحات:
( وذلك الس تخدامه Hysteresisاص طالي تعبير تخلفية على أثر )تم في هذه الدراس ة التخلفية:الحلقة
Hysteresis :the phenomenon inمعنى كلمة )إن ،عربية وعدة تختص اص ات هندس ية مراجععدة من قبل
which the value of a physical property lags behind changes in the effect causing it )هو
الم ثر الخارجي الذي تس بب بها حيث أن الخواص في لحظة تعتمد عن في تغيرات الخواص الفيزيائية خلفالت
"هس تيري"المص طلح الطبي عن الذي يجب تميزهو ،على الخواص الفيزيائية للعنص ر في اللحظة التي تس بقها
(Hysteria: exaggerated or uncontrollable emotion or excitement وال )في عني االنفع ال ي ذي
المشاعر.
تعبر من اع ة المتحكم على ق درة على األداء الجي د رغم المتغيرات الط ارئ ة (:Robustمناعة المتحكم )
وهي الميزة االهم للمتحكمات في الواقع العملي حيث اليمكن الس يطرة على هذه المتغيرات. تم ،التي يخض ع لها
استخدامها في البحث لتعبر عن أداء المتحكم عند تغير خواص السجل الزلزالي )الشدة وأثر الموقع( وتغير خواص
المبنى )االرتفاع الطابقي(.
الفصل األول
المقدمة
Introduction
2
الفصل األول
المقدمة
Introduction
:مقدمة .1ـ1
ه ذه الجمل ة هن اك لالزم لقراءةا وخالل الوق توالمتكررة تع د الزالزل من الكوارث الطبيعي ة الخطرة ج دا
التآبواس طة مكان ما دون ان يالحظها العالم اال أكبر فيدرجات او 5ان يض رب زلزال بقدر %3احتمال
ارثية ك يض رب زلزال كبير منطقة آهلة بالس كان يمكن أن تكون النتائجما ذلك، عند االرض ية ومعقياس الحركات
.األساسيةالخدمات و مع أضرار واسعة بالمباني وشبكات النقل
في والبش رية ن الناحية االقتص اديةم خس ائراً الزالزل أكبر 2011العام ش هدت االعوام الس ابقة خاص ًة
، كلفةً كثرالزلزال األ أنهTohoku (M9.0 )ونيوزيلندا حيث أثبت زلزال وتس ونامي ل اليابانمث عدة بلدانتاريخ
، في نس مه 19000يقرب من ووفاة ما إجمالي الخس ائربليون دوالر أمريكي في 700~400 حواليتس بب بفقد
20~15( تس بب بخس ائر ض خمة في بناء األورا المالية وفقدان حوالي M6.3) Christchurchحين أن زلزال
. وتسببت الهزات االرتدادية في كل منهما المزيد ٪80تأمين بنحو قطاع بليون دوالر أمريكي ضرر مع خسائر في
لص ين من الزالزل العديدة في افي و ،Vanمن الض رر. وش وهدت أيض ا خس ائر كبيرة في تركيا من وقوع زلزال
(earthquakes 2014).حدة من وقوع زلزال والية فرجينياالواليات المت ،Yunnan &Xinjiangتي مقاطع
البحث:مشكلة .2ـ1
تح دث عن دما ، و ف ي األروايوخس ائر كبي رة، خس ائر مادي ة س بب ف ي خ الل الزل زال انهي ار المنش آت يعتب ر
ولك ن ، كبي رة زل زال وق د تتحم ل بع ض المنش آت للعناص ر االنش ائية ق درة تحمله ا، يتج اوز الطل ب الزلزال ي
يع ود . البن اء ةإع ادو ألالس تعمال دون اص الحات كبي رة ةص الحغي ر تص بح كثي ر م ن األحي ان ف ي
، وم ن الض روري العم ل عل ى تص ميم جي د للمب اني البن اء ميص مت ه االض رار ال ىه ذل األه مالس بب
لطاق ة االت ي تس هم ف ي تبدي د ، و ووص التهعناص رة واس تعمال م واد ذات مطاوع ة ومقاوم ة عالي ة ف ي تنفي ذ
)طريقة المطاوعة التقليدية(.تشكل المفاصل اللدنة من خالل
3
باش رة بعد مفوري اش غال ، قدرة ، ومباني الدفاع المدنيلمس تش فياتكا تتطلب مباني الخدمات الهامةلكن
،الحفاظ على هذه المباني بحيث تحقق متطلبات االمان والس المة، لذلك فإنه من الض روري الزالزل القويةوقوع
(Myrtle et al. 2005).انشائية يمكن اصالحها بعد الزلزال مباشرةبأضرار ويسمح
نص ت معظم الكودات العالمية للتص ميم على ض رورة تص ميم المباني لمقاومة احمال الزالزل، كما تض من
العربي الس وري لتص ميم وتنفيذ المنش آت الخرس انية المس لحة فقرات خاص ة بتص ميم المباني لمقاومة احمال الكود
الزالزل في المرحلة المرنة دون ضرر انشائي وينتج عن عدم السماي بالضرر االنشائي ارتفاع كلفة تنفيذ المنشأة.
نعًا ألي انهيار جزئي أو كلي، وتجنبًا يتم عادة تص ميم المنش أة لتحقق المقاومة واالس تقرار والثبات م
لحدوث خس ائر بش رية وذلك عند تعرض ها لزالزل معتدلة الش ده، المحتمل حدوثها في عمر المنش أة التص ميمي
. ولكن في حال تعرض المنش أ الى زلزال عنيف ش دته عالية جدًا نس بة الى الش دة %90 زال يتجاو باحتمال
ا التص ميمي )وهي عمليًا اعلى ش دة زلزالية يحتمل حدوثها في موقع المنش أ المحتمل حدوثها مرة واحدة في عمره
كبيرة نس بيًا في عناص رها االنش ائية وغير االنش ائية، بش ريطة خالل الزمن مهما طال( وعندها يس مح بظهور ش قو
األرواي. حيث ائر ببحدوث انهيار كلي في المنشأة ينجم عنه خس حال يسمبقاء المنشأة مترابطة أثناء الزلزال ولكن
نميز معيارين اساسيّين في تصميم المنشآت:
(.life safetyمعيار الحفاظ على الحياة واألرواي ) -1
(.Immediate Occupancyمعيار االشغال الفوري للمنشآت ) -2
توجد أكثر من آلية تزود المنشأ بإمكانية تبديد الطاقة الزلزالية:
( structural local damageي الموض عي والتش ققات )آلية الس لوك غير المرن للض رر االنش ائ -1
ر والبقاء من آثار الزالزل، ان اعتبا للنجاةويخوله الكامنةالذي يزود المنش أ بإمكانية لتبديد الطاقة
.هذا السلوك في التصميم سوف يقودنا الى تصميم اقتصادي ومالئم للمنشأة
ناء تشوهها )التحكم السلبي باستجابة المنشأ(.ألية إضافة مخمدات وعناصر تقوم بتبديد الطاقة أث -2
4
كية االس تجابة الدينامياقتري تحس ين حيثعن االس اليب التقليدية بديالً اً مفهوم 1972(عام Yao)قدم
( وش به االيجابي Active controlمن خالل التحكم االيجابي )االض افية، وردود أفعال قوى إض افةب المنش آت
(Semi active control) ، يعطي فإنه اس تجابة المنش آتهذا نوع يتفاعل مع معطيات الهزة االرض ية و نألو
(Spencer Jr and Sain 1997). استجابة ممكنة أفضل
ابي عل ى تحس ين االس تجابة الزلزالي ة م ن هن ا ت اتي مش كلة البح ث ف ي دراس ة ق درة ال تحكم ش به االيج
الزلزالية السابقة. حداثللمنشأت خاصًة بعد قصور الطر التقليدية عن حماية المنشآت كما أثبتت األ
(:Research Objectives) ثالبحأهداف .3ـ1
Semi Activeاإليج ابي )يه دف ه ذا البح ث لدراس ة دراس ة فعالي ة وج دوى ال تحكم ش به
Control تخمي د ض افة ا م ن خ اللتحس ين اس تجابة المنش آت الزلزالي ة ل( بالمقارن ة م ع ال تحكم الس لبي
.شديدة القدر لزالزللمنشآت التي تتعرض لوصالبة
:(Scope of Work) خطوات البحث .4ـ1
يلي:ما ويتضمن (MATLAB Control Toolboxبناء متحكم بواسطة برنامج ماتالب )
o تطوير متحكمLQR .التقليدي من خالل فصل االهتزاز الحر عن االهتزاز القسري
o ( برمجة وبناء متحكم خطي ديناميكي بطريقةH∞) ومتحكم ،H2.
بنظام التحكم شبه االيجابي والسلبي وبدون تحكم. دراسة مقارنة بين استجابة المباني
رتفاع:مع تغير اال استجابة األبنية على دراسة فعالية التحكم الشبه االيجابي
o تحليلية دراسة( 3لبناء معدني من ثالث طوابق_story benchmark.)
.دراسة أثر موقع المخمدات على كفاءة المتحكم
o 9لبناء معدني من تحليلية دراسة ( 9طوابق_story benchmark.)
o 20لبناء معدني من تحليلية دراسة ( 20طابق_story benchmark.)
التقليديةية المزودة بأجهزة التحكم بالمقارنة مع االبنية المطاوعة لألبن تحري متطلبات.
توصياتالنتائج و استخالص ال.
5
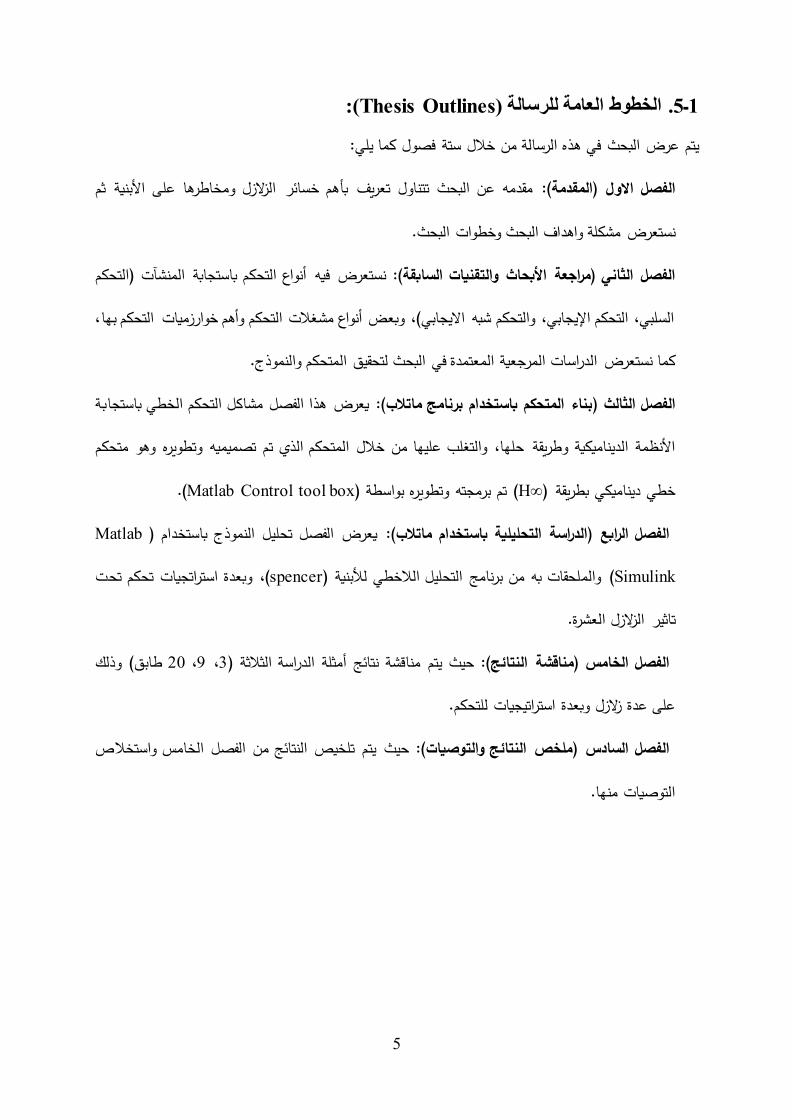
:(Thesis Outlinesالخطوط العامة للرسالة ) .5ـ1
فصول كما يلي: ةتسيتم عرض البحث في هذه الرسالة من خالل
م ثومخاطرها على األبنية بأهم خسائر الزالزلتناول تعريف ت مقدمه عن البحث (:مقدمةالالفصل االول )
. وخطوات البحثنستعرض مشكلة واهداف البحث
تحكم أنواع التحكم باستجابة المنشآت )النستعرض فيه :السابقة( والتقنيات الفصل الثاني )مراجعة األبحاث
السلبي، التحكم اإليجابي، والتحكم شبه االيجابي(، وبعض أنواع مشغالت التحكم وأهم خوارزميات التحكم بها،
.متحكم والنموذ الالمعتمدة في البحث لتحقيق كما نستعرض الدراسات المرجعية
ابة مشاكل التحكم الخطي باستج يعرض هذا الفصل(: الببناء المتحكم باستخدام برنامج مات) الفصل الثالث
والتغلب عليها من خالل المتحكم الذي تم تصميميه وتطويره وهو متحكم ا،طريقة حلهو األنظمة الديناميكية
(.Matlab Control tool box( تم برمجته وتطويره بواسطة )∞Hخطي ديناميكي بطريقة )
Matlabالنموذ باستخدام ) تحليلالفصل يعرض (:باستخدام ماتالب)الدراسة التحليلية الفصل الرابع
Simulinkلألبنيةخطي لحقات به من برنامج التحليل الال( والم (spencer ،) تحت وبعدة استراتجيات تحكم
.العشرةتاثير الزالزل
طابق( وذلك 20 ،9 ،3مناقشة نتائج أمثلة الدراسة الثالثة )يتم حيث (:النتائجمناقشة الفصل الخامس )
على عدة زالزل وبعدة استراتيجيات للتحكم.
تلخيص النتائج من الفصل الخامس واستخالص حيث يتم (:ملخص النتائج والتوصيات)الفصل السادس
التوصيات منها.

الفصل الثاني
السابقةوالتقنيات مراجعة األبحاث
Review of previous researches and techniques

7
الفصل الثاني
السابقةمراجعة األبحاث والتقنيات
Review of previous researches and techniques
مقدمة: .1ـ2
بدأ التحكم باستجابة المنشآت أساسًا في حل المشكالت الهندسية في هندسة الفضاء والطيران، ثم سرعان
س بعينيات القرن الماض ي لحماية المنش آت اثناء االحمال الش ديدة كالزالزل المدنية فيدس ة ما بدأ باالنتقال إلى الهن
أو لت أمين راح ة مس تخ دمين ه ذه المنش آت أثن اء االحم ال المتوس ط ة ك الري اي والزالزل متوس ط ة الش دة
(Housner et al. 1997)، المرنة مخمدات اللزجة الالزلزالي و وذلك بواس طة العزل(Viscoelastic و )مخمدات ال
. بعد عدة س نوات ظهر مبدأ التحكم اإليجابي في أول اس تخدام (Tuned liquid damperالس وائل المعايرة )ذات
لتخفيض ،(Spencer Jr and Soong 1999)، ( في طوكيوstory Kyobashi Seiwa-11) ل ه في بن اء
طريقة التحكم ش به اإليجابي في ش ق م خراً نجحت القوية والزالزل متوس طة الش دة. اهتزاز المبنى تحت تأثير الرياي
: األول قس مينيقس م هذا الفص ل الى طريقها للتحكم باس تجابة األبنية في الواليات المتحدة األمريكية واليابان.
أكثر نظريات التحكم اس تخدامًا في التحكم بهذه يتناول ( والقس م الثاني Actuatorأجهزة ومش غالت التحكم ) يتناول
عرض للمشكلة الرئيسية في التحكم باستجابة المنشآت. وأخيراً األجهزة
(Spencer Jr and Soong 1999)اإليجابي. ( المزود بمخمدات الكتلة story Kyobashi Seiwa-11بناء ) :(1-2الشكل )
8
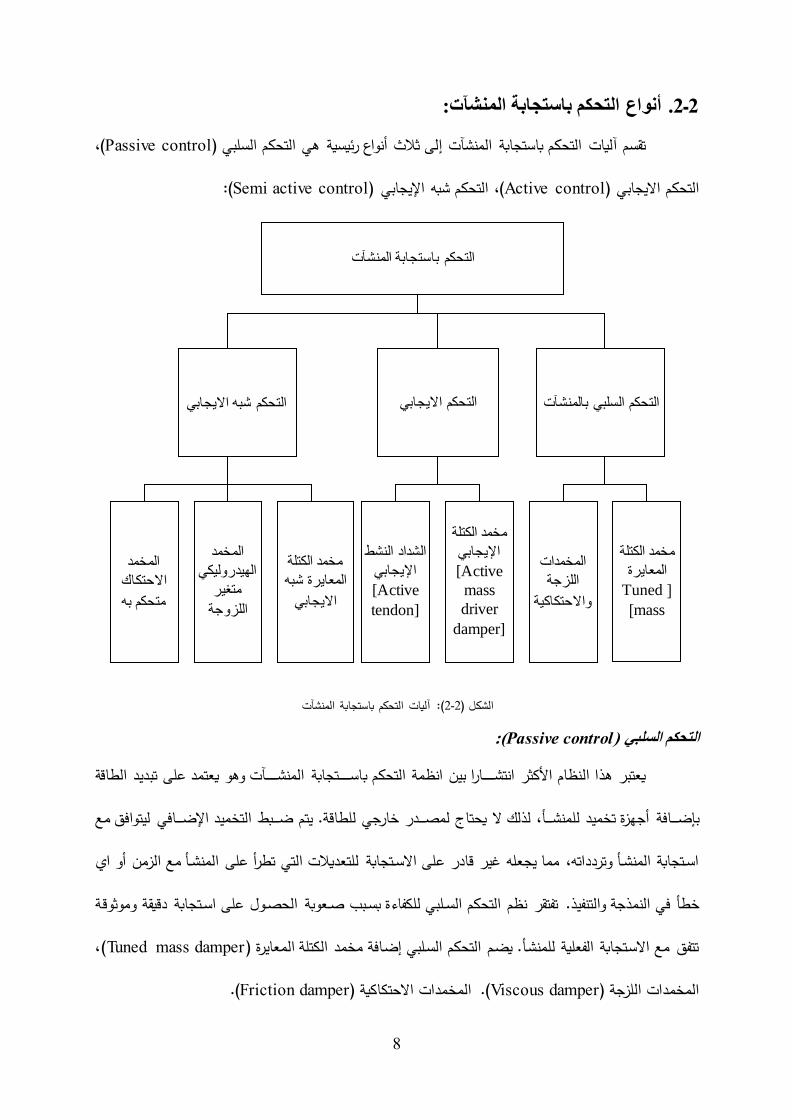
أنواع التحكم باستجابة المنشآت: .2ـ2
(، Passive controlالتحكم باستجابة المنشآت إلى ثالث أنواع رئيسية هي التحكم السلبي ) آلياتتقسم
(:Semi active control(، التحكم شبه اإليجابي )Active controlالتحكم االيجابي )
التحكم باستجابة المنشآت (: آليات2-2الشكل )
:(Passive controlالتحكم السلبي )
اس تجابة المنش آت وهو يعتمد على تبديد الطاقة مة التحكم بظنظام األكثر انتش ارا بين انيعتبر هذا ال
يتم ض بط التخميد اإلض افي ليتوافق مع يحتا لمص در خارجي للطاقة.لذلك ال ، بإض افة أجهزة تخميد للمنش أ
زمن أو اي المنش أ مع الللتعديالت التي تطرأ على اس تجابة المنش أ وتردداته، مما يجعله غير قادر على االس تجابة
وموثوقة ةتفتقر نظم التحكم الس لبي للكفاءة بس بب ص عوبة الحص ول على اس تجابة دقيق خطأ في النمذجة والتنفيذ.
(، Tuned mass damper)المعايرة تتفق مع االس تجابة الفعلية للمنش أ. يض م التحكم الس لبي إض افة مخمد الكتلة
.(Friction damper(. المخمدات االحتكاكية )Viscous damperالمخمدات اللزجة )
باستجابة المنشآت التحكم
التحكم السلبي بالمنشآت
مخمد الكتلة
المعايرة
[Tuned
mass]
المخمدات
اللزجة
واالحتكاكية
التحكم االيجابي
مخمد الكتلة
اإليجابي
[Active
mass
driver
damper]
الشداد النشط
اإليجابي
[Active
tendon]
التحكم شبه االيجابي
مخمد الكتلة
المعايرة شبه
االيجابي
المخمد
الهيدروليكي
متغير
لزوجةال
المخمد
االحتكاك
حكم بهمت

9
(:Active controlالتحكم اإليجابي )
أجهزة التحكم التي تول ده ا الق درة على إض اف ة وتخمي د الط اق ة من خالل القوى نظ اميمل ك ه ذا ال
(actuator) كبيرا خفيض اً ت يحقق مماباس تمرار المنش أ فعل حركة ورد مراقبة، كما يتيح الكهربائية أو الهيدروليكية
لتحس ن يرجع ا ، وس ببالبس يطبالمقارنة مع نظام التحكم الس لبي وذلك أثناء األحداث الزلزالية س تجابة المنش آتال
.ارجيةخقوة فيرتو و ،لهااألجهزة وفقا التي تولدهاالقوى إلى استخدام حساسات تراقب حركة المنشأ وتعدل
عرضي هذاو ،يسددتطيت ميمينها مولد محليال للطاقةكبير خارجي صدددرمتطلب يإن توليد قوى إض افية
مسددتةرة غيرش بكة الكهرباء مكون حيث الز الز خال المنش ا لحمايةله التطبيق العملي إمكانية مسدداتالت حو
قوى إضداييةمصددر برعتم (actuator) أجهزة التحكم فإن ،أخرى ومن ناحية ،التيار الكهربائينةطاع ال عرض ةو
تي بذلت الالكبيرة على الرغم من الجهودو المنشدي، اسدتةرار بش أنة يدعد أس ئلة مطرحوبالتالي ، وليس ت مخمدات
ماذجن يي طبيعة عدم اليةين، ولكن التحكم اتنظري من خال مطبيق هذه المشدددددددكلة التخفيف من حدة امجاه يي
.ال مزا دون حل كبيرة مخاوفاثار الهندسة المدنية
(:Semi Active Controlالتحكم الشبه اإليجابي )
في ذات أداء عالي مهمة تقنيةوهي اإليجابية والس لبية نظمة التحكمأ حل وس ط بين يعتبر ًهذا النظام
ها تمتازولكن ،التحكم الس لبيجهزة أك مخمدات(الات للطاقة )مبدد ، يتم التحكم من خاللالمنش أتحس ين اس تجابة
االس تجابة الديناميكية لتحس ين الزمال الحقيقي في الوقت اض بطه يمكن يتال ة بس رعة والمتغير هاخص ائص ب
من الخص ائص الجذابة للنظم اإليجابية، بعض اً ملكمثل هذه األجهزة فإنها ت، وعلى الرغم من محدودية لمنش آتل
كما يمكنها تحس ين ص فات المخمدات المزروعة بأماكن ،في أنها قادرة على مراقبة القوة في الوقت الحقيقيتتجلى
الزمة اقة الوحيدة الوبالتالي تحس ين اس تجابة المنش أ بأكمله. إن الط ، محددة من المنش أ اس تناداج إلى االس تجابة
لى جهاز ض بط ص فات ظمة التحكم ش به اإليجابية هيلتش غيل أن الالزمة ألجهزة االس تش عار وحواس ب الس يطرة، واج
ما تكون هذه المتطلبات أقل بكثير من متطلبات أجهزة التحكم اإليجابي.وعادة المخمدات،
( طريقة عمل التحكم شبه اإليجابي من خالل مقارنته بالتحكم السلبي والتحكم اإليجابي:3-2الشكل )يوضح
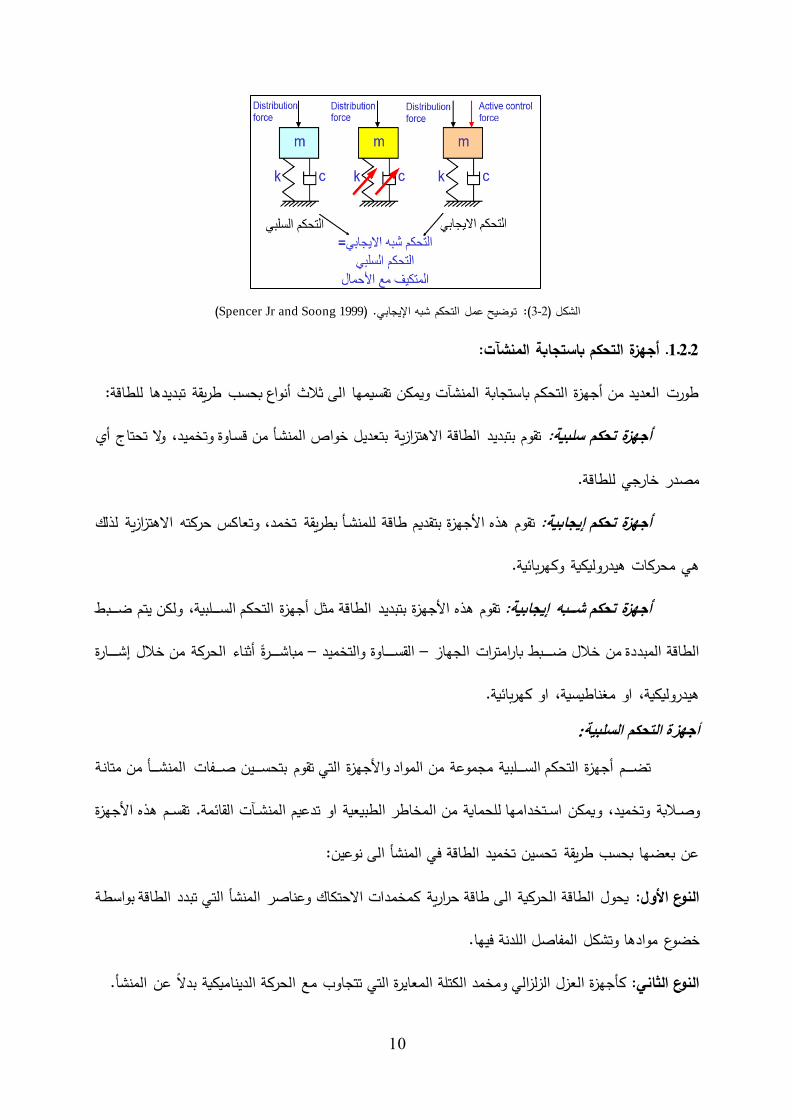
10
(Spencer Jr and Soong 1999) .اإليجابي(: توضيح عمل التحكم شبه 3-2الشكل )
المنشآت: ةباستجابالتحكم أجهزة .1ـ2ـ2
ها للطاقة:يدتبدطورت العديد من أجهزة التحكم باستجابة المنشآت ويمكن تقسيمها الى ثالث أنواع بحسب طريقة
وال تحتا أي ،الطاقة االهتزازية بتعديل خواص المنش أ من قس اوة وتخميد تبديدتقوم ب أجهزة تحكم سلبية:
مصدر خارجي للطاقة.
زازية لذلك وتعاكس حركته االهت، قديم طاقة للمنش أ بطريقة تخمدتقوم هذه األجهزة بتأجهزة تحكم إيجابية:
هي محركات هيدروليكية وكهربائية.
ض بط يتم ن لك، و الطاقة مثل أجهزة التحكم الس لبية تبديدتقوم هذه األجهزة بأجهزة تحكم شــــبه إيجابية:
من خالل إش ارة أثناء الحركة مباش رةً –القس اوة والتخميد – الجهاز تبارامترادة من خالل ض بط مبدالطاقة ال
هيدروليكية، او مغناطيسية، او كهربائية.
أجهزة التحكم السلبية:
تض م أجهزة التحكم الس لبية مجموعة من المواد واألجهزة التي تقوم بتحس ين ص فات المنش أ من متانة
هزة القائمة. تقس م هذه األجالمنش آت يمكن اس تخدامها للحماية من المخاطر الطبيعية او تدعيم ، و وص البة وتخميد
عن بعضها بحسب طريقة تحسين تخميد الطاقة في المنشأ الى نوعين:
يحول الطاقة الحركية الى طاقة حرارية كمخمدات االحتكاك وعناصر المنشأ التي تبدد الطاقة بواسطة :النوع األول
.وتشكل المفاصل اللدنة فيهاخضوع موادها
أ.تتجاوب مع الحركة الديناميكية بداًل عن المنشالتي المعايرة الزلزالي ومخمد الكتلة أجهزة العزل ك :النوع الثاني
11
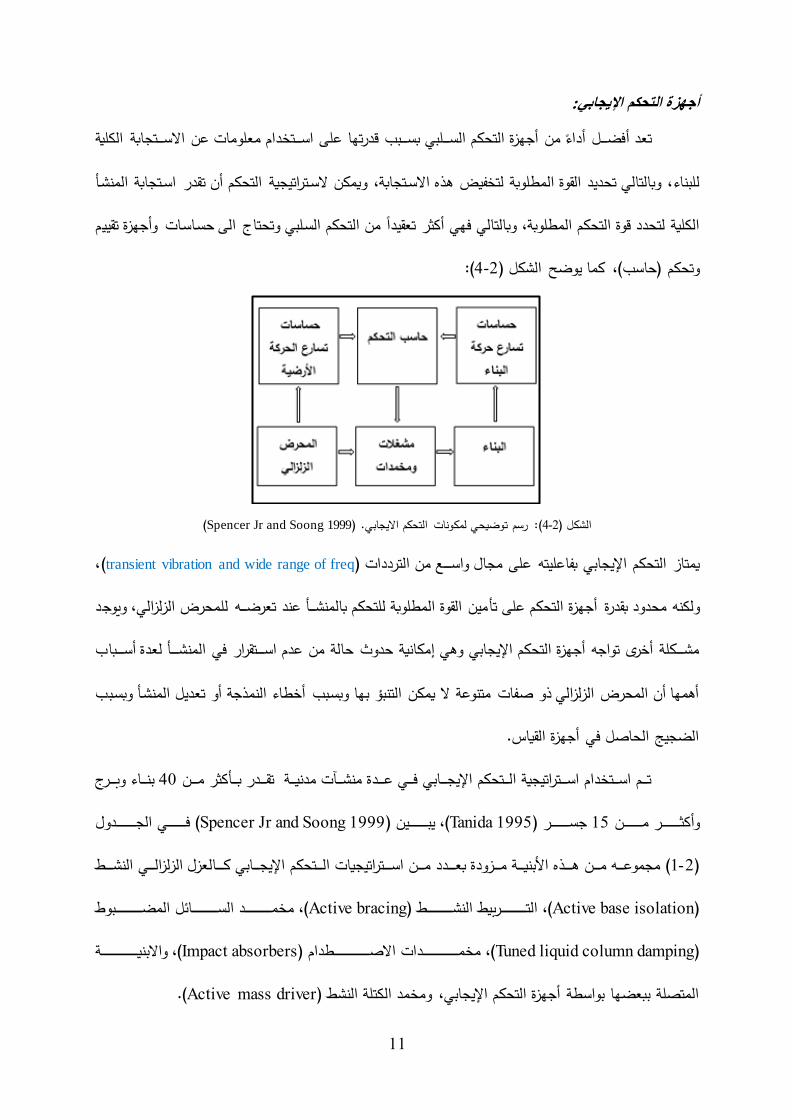
أجهزة التحكم اإليجابي:
اس تخدام معلومات عن االس تجابة الكلية بس بب قدرتها على من أجهزة التحكم الس لبي تعد أفض ل أداءً
قدر اس تجابة المنش أ أن تيمكن الس تراتيجية التحكم ، و وبالتالي تحديد القوة المطلوبة لتخفيض هذه االس تجابة ،للبناء
لتحدد قوة التحكم المطلوبة، وبالتالي فهي أكثر تعقيدًا من التحكم الس لبي وتحتا الى حس اس ات وأجهزة تقييم الكلية
(:4-2الشكل )كما يوضح (،وتحكم )حاسب
(Spencer Jr and Soong 1999) .: رسم توضيحي لمكونات التحكم االيجابي(4-2الشكل )
(، transient vibration and wide range of freq) اإليجابي بفاعليته على مجال واس ع من الترددات التحكم يمتاز
يوجد و ،مين القوة المطلوبة للتحكم بالمنش أ عند تعرض ه للمحرض الزلزاليأأجهزة التحكم على تبقدرة ه محدود لكنو
حالة من عدم اس تقرار في المنش أ لعدة أس باب حدوثهي إمكانية و مش كلة أخرى تواجه أجهزة التحكم اإليجابي
وبس بب أخطاء النمذجة أو تعديل المنش أ وبس ببالتنب بها نأهمها أن المحرض الزلزالي ذو ص فات متنوعة ال يمك
الضجيج الحاصل في أجهزة القياس.
بن اء وب ر 40تق در ب أكثر م ن ت م اس تخدام اس تراتيجية ال تحكم اإليج ابي ف ي ع دة منش آت مدني ة
الج دول ف ي (Spencer Jr and Soong 1999)، يب ين (Tanida 1995)جس ر 15وأكث ر م ن
الزلزال ي النش ط ك العزلم ن اس تراتيجيات ال تحكم اإليج ابي مجموع ه م ن ه ذه األبني ة م زودة بع دد( 2-1)
(Active base isolation( الت ربيط النش ط ،)Active bracing مخم د الس ائل المض بو ،)
(Tuned liquid column damping( مخم دات االص طدام ،)Impact absorbers واالبني ة ،)
(.Active mass driverومخمد الكتلة النشط )المتصلة ببعضها بواسطة أجهزة التحكم اإليجابي،
12
( أنه على الرغم من اس تخدام التحكم ش به اإليجابي حاليًا spencer and Soong 1999اثبتت دراس ة )
من أجل تحس ين اس تجابة المنش آت على الرياي المتوس طة لتحقيق راحة قاطني البناء إال أن نظام التحكم ش به
ومخاطر زلزالية أعلى.، ورفع قدرة تحمله على شدة رياي ،بة المنشأاإليجابي قادر على تحسين استجا
أن تطور أجهزة التحكم ش به اإليجابية يس اهم في زيادة المرونة واالقتص اد في عملية أثبتت الدراس ة كما
االنش اء من حيث التعامل مع احتماالت مختلفة لألحمال )ش دات منخفض ة، متوس طة، وعالية من الرياي أو
( حيث يمكن أن يحتوي البناء تخميد بنظام تحكم س لبي يقاوم األحمال األس اس ية ونظام تحكم إيجابي أو الزالزل
شبه إيجابي يقاوم االحمال الخاصة والطارئة بحيث يتكَيف المبنى مع االحمال التي يتعرض لها.
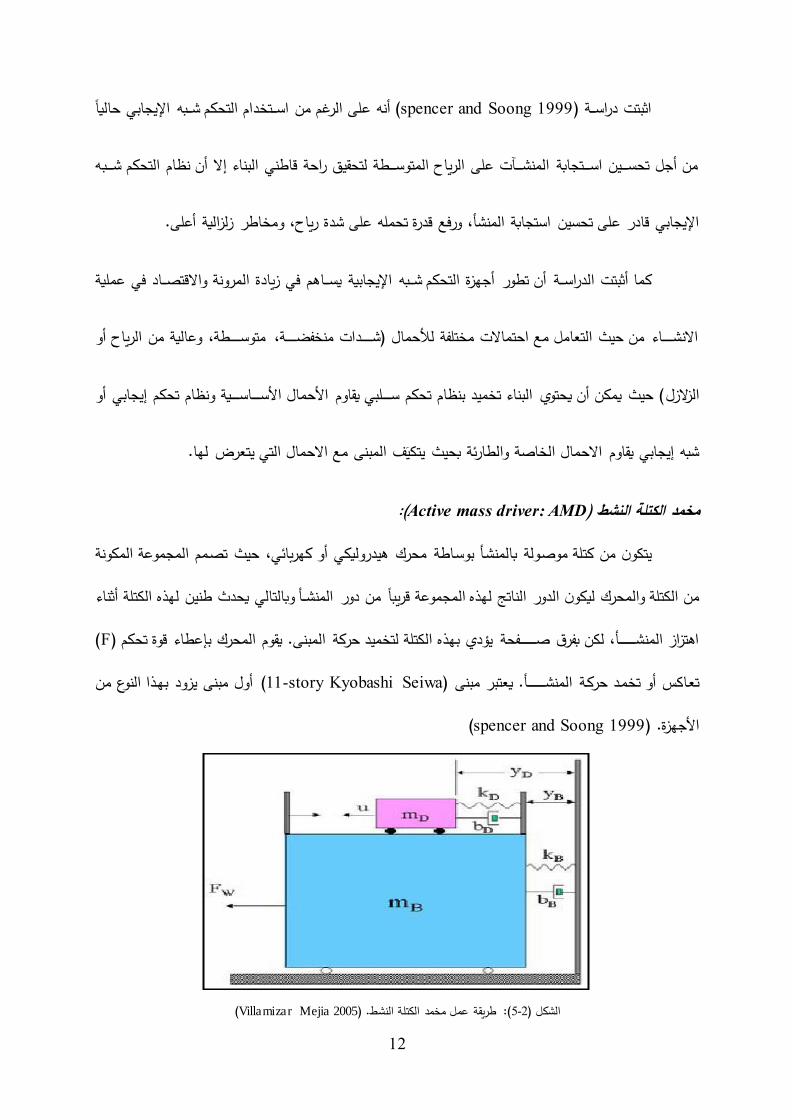
(:Active mass driver: AMD) نشطمخمد الكتلة ال
كونة ص مم المجموعة الممحرك هيدروليكي أو كهربائي، حيث تس اطة يتكون من كتلة موص ولة بالمنش أ بو
ثناء دور المنش أ وبالتالي يحدث طنين لهذه الكتلة أ كون الدور الناتج لهذه المجموعة قريبًا منمن الكتلة والمحرك لي
( F)اهتزاز المنش أ، لكن بفر ص فحة ي دي بهذه الكتلة لتخميد حركة المبنى. يقوم المحرك بإعطاء قوة تحكم
يزود به ذا النوع من أول مبنى (story Kyobashi Seiwa-11) تع اكس أو تخم د حرك ة المنش أ. يعتبر مبنى
(spencer and Soong 1999) األجهزة.
(Villamizar Mejia 2005). (: طريقة عمل مخمد الكتلة النشط5-2الشكل )
13
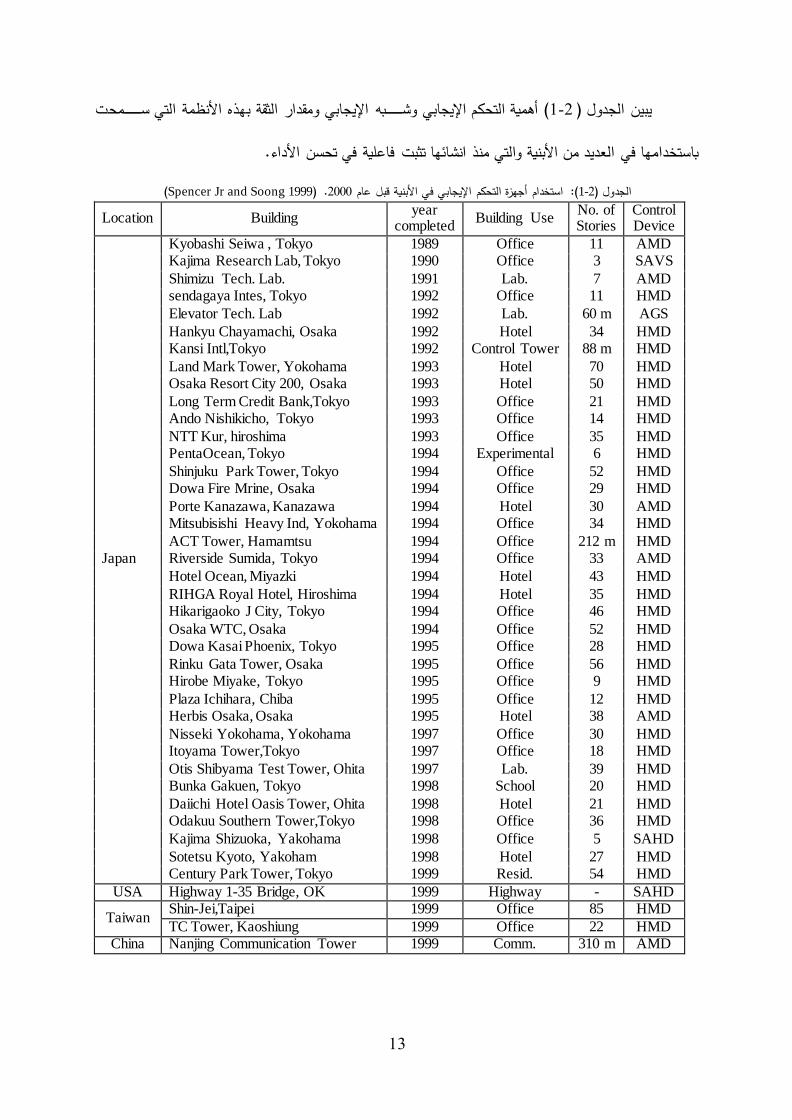
هذه األنظمة التي س محت ( أهمية التحكم اإليجابي وش به اإليجابي ومقدار الثقة ب1-2الجدول )يبين
باستخدامها في العديد من األبنية والتي منذ انشائها تثبت فاعلية في تحسن األداء.
(Spencer Jr and Soong 1999). 2000استخدام أجهزة التحكم اإليجابي في األبنية قبل عام (: 1-2الجدول )
Location Building year
completed Building Use
No. of Stories
Control Device
Japan
Kyobashi Seiwa , Tokyo 1989 Office 11 AMD Kajima Research Lab, Tokyo 1990 Office 3 SAVS
Shimizu Tech. Lab. 1991 Lab. 7 AMD sendagaya Intes, Tokyo 1992 Office 11 HMD
Elevator Tech. Lab 1992 Lab. 60 m AGS
Hankyu Chayamachi, Osaka 1992 Hotel 34 HMD Kansi Intl,Tokyo 1992 Control Tower 88 m HMD
Land Mark Tower, Yokohama 1993 Hotel 70 HMD Osaka Resort City 200, Osaka 1993 Hotel 50 HMD
Long Term Credit Bank,Tokyo 1993 Office 21 HMD Ando Nishikicho, Tokyo 1993 Office 14 HMD
NTT Kur, hiroshima 1993 Office 35 HMD PentaOcean, Tokyo 1994 Experimental 6 HMD
Shinjuku Park Tower, Tokyo 1994 Office 52 HMD Dowa Fire Mrine, Osaka 1994 Office 29 HMD
Porte Kanazawa, Kanazawa 1994 Hotel 30 AMD Mitsubisishi Heavy Ind, Yokohama 1994 Office 34 HMD
ACT Tower, Hamamtsu 1994 Office 212 m HMD Riverside Sumida, Tokyo 1994 Office 33 AMD
Hotel Ocean, Miyazki 1994 Hotel 43 HMD
RIHGA Royal Hotel, Hiroshima 1994 Hotel 35 HMD Hikarigaoko J City, Tokyo 1994 Office 46 HMD
Osaka WTC, Osaka 1994 Office 52 HMD Dowa Kasai Phoenix, Tokyo 1995 Office 28 HMD
Rinku Gata Tower, Osaka 1995 Office 56 HMD Hirobe Miyake, Tokyo 1995 Office 9 HMD
Plaza Ichihara, Chiba 1995 Office 12 HMD Herbis Osaka, Osaka 1995 Hotel 38 AMD
Nisseki Yokohama, Yokohama 1997 Office 30 HMD Itoyama Tower,Tokyo 1997 Office 18 HMD
Otis Shibyama Test Tower, Ohita 1997 Lab. 39 HMD Bunka Gakuen, Tokyo 1998 School 20 HMD
Daiichi Hotel Oasis Tower, Ohita 1998 Hotel 21 HMD Odakuu Southern Tower,Tokyo 1998 Office 36 HMD
Kajima Shizuoka, Yakohama 1998 Office 5 SAHD
Sotetsu Kyoto, Yakoham 1998 Hotel 27 HMD Century Park Tower, Tokyo 1999 Resid. 54 HMD
USA Highway 1-35 Bridge, OK 1999 Highway - SAHD
Taiwan Shin-Jei,Taipei 1999 Office 85 HMD
TC Tower, Kaoshiung 1999 Office 22 HMD China Nanjing Communication Tower 1999 Comm. 310 m AMD
14
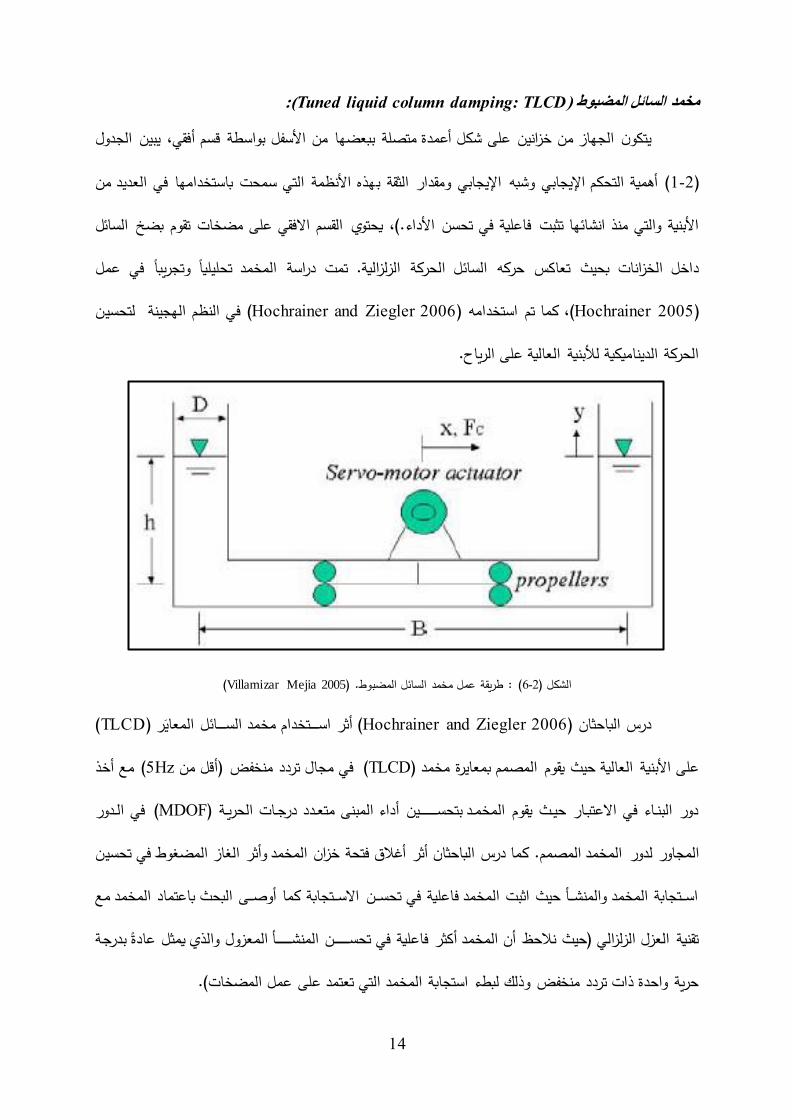
(:Tuned liquid column damping: TLCDمخمد السائل المضبوط )
الجدول ن يبييتكون الجهاز من خزانين على شكل أعمدة متصلة ببعضها من األسفل بواسطة قسم أفقي،
هذه األنظمة التي سمحت باستخدامها في العديد من ( أهمية التحكم اإليجابي وشبه اإليجابي ومقدار الثقة ب2-1)
خ السائل فقي على مضخات تقوم بض(، يحتوي القسم االاألبنية والتي منذ انشائها تثبت فاعلية في تحسن األداء.
داخل الخزانات بحيث تعاكس حركه السائل الحركة الزلزالية. تمت دراسة المخمد تحليليًا وتجريبًا في عمل
(Hochrainer 2005) كما تم استخدامه ،(Hochrainer and Ziegler 2006) في النظم الهجينة لتحسين
الحركة الديناميكية لألبنية العالية على الرياي.
(Villamizar Mejia 2005)( : طريقة عمل مخمد السائل المضبو . 6-2الشكل )
( TLCD( أثر اس تخدام مخمد الس ائل المعاَير )Hochrainer and Ziegler 2006درس الباحثان )
( مع أخذ 5Hz( في مجال تردد منخفض )أقل من TLCDعلى األبنية العالية حيث يقوم المصمم بمعايرة مخمد )
( في ال دور MDOFدور البن اء في االعتب ار حي ث يقوم المخم د بتحس ين أداء المبنى متع دد درج ات الحري ة )
المخمد المصمم. كما درس الباحثان أثر أغال فتحة خزان المخمد وأثر الغاز المضغو في تحسين المجاور لدور
اس تجابة المخمد والمنش أ حيث اثبت المخمد فاعلية في تحس ن االس تجابة كما أوص ى البحث باعتماد المخمد مع
ة عزول والذي يمثل عادًة بدرجتقنية العزل الزلزالي )حيث نالحظ أن المخمد أكثر فاعلية في تحس ن المنش أ الم
حرية واحدة ذات تردد منخفض وذلك لبطء استجابة المخمد التي تعتمد على عمل المضخات(.
15
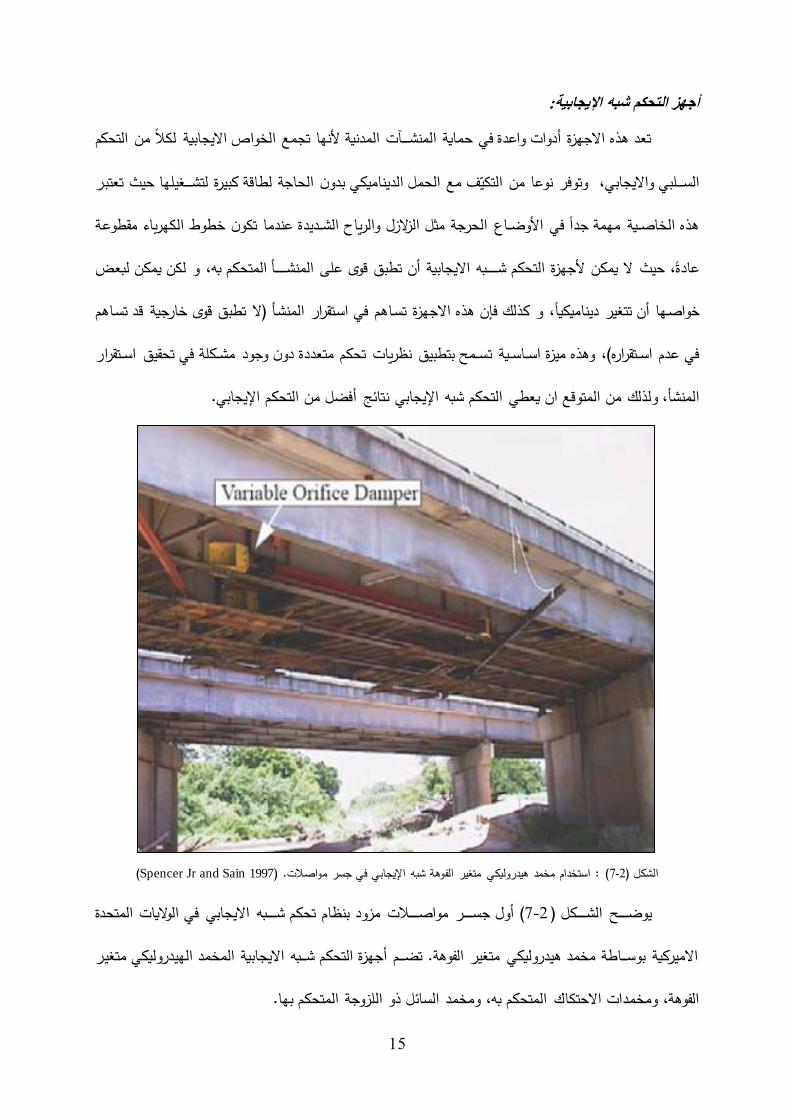
أجهز التحكم شبه اإليجابية:
تحكم من ال تجمع الخواص االيجابية لكالً ألنهاتعد هذه االجهزة أدوات واعدة في حماية المنش آت المدنية
حيث تعتبر اف مع الحمل الديناميكي بدون الحاجة لطاقة كبيرة لتش غيلهنوعا من التكيّ وتوفر ، وااليجابيالس لبي
تكون خطو الكهرباء مقطوعة هذه الخاص ية مهمة جدًا في األوض اع الحرجة مثل الزالزل والرياي الش ديدة عندما
بعض لكن يمكن ل ، وم بهال يمكن ألجهزة التحكم ش به االيجابية أن تطبق قوى على المنش أ المتحك، حيث عادةً
م تس اهم في اس تقرار المنش أ )ال تطبق قوى خارجية قد تس اهكذلك فإن هذه االجهزة ، و خواص ها أن تتغير ديناميكياً
س مح بتطبيق نظريات تحكم متعددة دون وجود مش كلة في تحقيق اس تقرار تميزة اس اس ية في عدم اس تقراره(، وهذه
يجابي.تائج أفضل من التحكم اإلنيجابي التحكم شبه اإل لذلك من المتوقع ان يعطي، و المنشأ
(Spencer Jr and Sain 1997). شبه اإليجابي في جسر مواصالت متغير الفوهة ( : استخدام مخمد هيدروليكي7-2الشكل )
أول جس ر مواص الت مزود بنظام تحكم ش به االيجابي في الواليات المتحدة (7-2الش كل )يوض ح
االميركية بوس اطة مخمد هيدروليكي متغير الفوهة. تض م أجهزة التحكم ش به االيجابية المخمد الهيدروليكي متغير
ك المتحكم به، ومخمد السائل ذو اللزوجة المتحكم بها.الفوهة، ومخمدات االحتكا
16
:(Variable-orifice fluid dampers) الهيدروليكي متغير الفوهةمخمد ال
، من خالل تعديل فتحه ص مام )الفوهة التي يمر بها المخمد بمعامل تخميد يمكن تعديلهيتص ف هذا
قوة لاها الس ائل الهيدروليكي، وبالتالي يمكن التحكم بالس ائل ض من حجرتي المخمد( لتغير المقاومة التي يتعرض ل
(Symans and Constantinou 1997) المتولدة في المخمد بوساطة قوة صغيرة الزمة لتعديل فتحة الصمام.
عدة اس تراتيجيات تحكم في مع( Semi Active Hydraulic damper: SHD) اس تخدم هذا الجهاز
(Kurino and Kobori 1998) دراس ة، كما اثبتت (Kurino and Kobori 1998) از يمكن ان يبدد أن الجه
ضعف الطاقة المخمدة بوساطة المخمد الهيدروليكي السلبي.
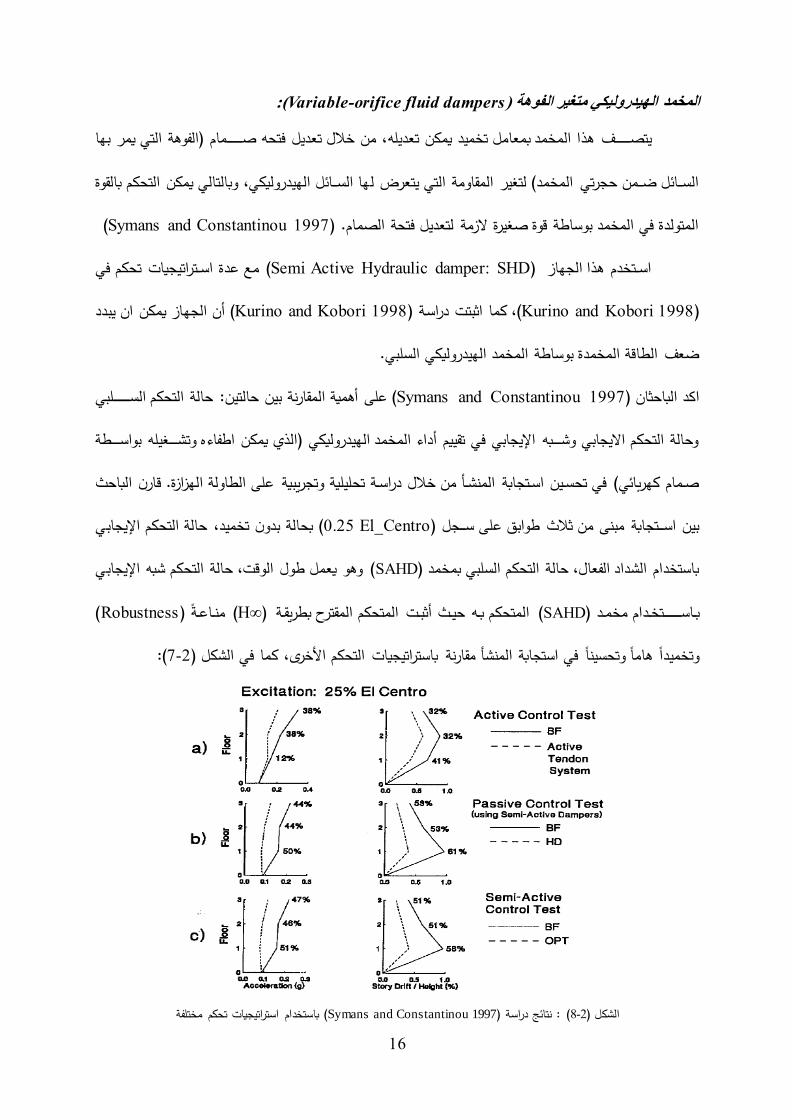
على أهمية المقارنة بين حالتين: حالة التحكم الس لبي (Symans and Constantinou 1997)الباحثان اكد
وحالة التحكم االيجابي وش به اإليجابي في تقييم أداء المخمد الهيدروليكي )الذي يمكن اطفاءه وتش غيله بواس طة
ارن الباحث لهزازة. قص مام كهربائي( في تحس ين اس تجابة المنش أ من خالل دراس ة تحليلية وتجريبية على الطاولة ا
( بحالة بدون تخميد، حالة التحكم اإليجابي El_Centro 0.25بين اس تجابة مبنى من ثالث طوابق على س جل )
( وهو يعمل طول الوقت، حالة التحكم شبه اإليجابي SAHDباستخدام الشداد الفعال، حالة التحكم السلبي بمخمد )
( Robustness( من اع ًة )∞Hالمتحكم المقتري بطريق ة ) ( المتحكم ب ه حي ث أثب تSAHDب اس تخ دام مخم د )
(:7-2الشكل )كما في وتخميدًا هامًا وتحسينًا في استجابة المنشأ مقارنة باستراتيجيات التحكم األخرى،
م استراتيجيات تحكم مختلفةباستخدا (Symans and Constantinou 1997)( : نتائج دراسة 8-2الشكل )

17
( في العديد من األبنية العالية أهمها:SAHD) المخمد الهيدروليكي شبه اإليجابيتم استخدام
طابقًا وتم أثبات قدرته في تحسين التخميد. 11تم استخدامه في بناء من(Kurata et al. 2000)
( تم اس تخدامه في بناءShiodone Kejima Tower في طوكيو في اليابان، حيث طور الباحث )(Kurata et al. 2000) ( مخمد هيدروليكي ش به إيجابيSAHD اس تخدمه في البناء عام )1998
والذي يعتبر اول اس تخدام للمخمد في بناء طابقي حيث درس الباحث أثر المخمد على اس تجابة المنش أ ( حيث أثبت فاعلية المخمد.Steady Stateهتزاز الطبيعي المستقر )باال
بالحجمأجريت عليه دراس ة تجريبية بمثال ( الطبيعي في مخبرKobori research complex في ) (Kurata et al. 2000). اليابان
الذي يعتبر أول بناء مزود بالتحكم ( 7-2الشكل )تم استخدامه في دراسة تجريبيه على جسر مواصالت (Kuehn et al. 1999; Neff Patten et al. 1999)شبه اإليجابي في الواليات المتحدة األمريكية.
(Kurata et al. 2000) (SAHDالمزود بمخمدات ) Kajima Shizuoka( : بناء 9-2الشكل )
وزم ال ه عملي ة أمثل ة توض ع ه ذه (Salam et al. 2012)كم ا درس الباح ث س يد عب د الس الم
األجه زة ف ي بن اء برج ي ط ابقي حي ث وج د أن اس تخدام المخم د وربط ه ب ين ع دة طواب ق يعط ي نت ائج
ريق ة لحس اب األم اكن المثل ى لتوض عها. إن اس تخدام ه ذه أفض ل ف ي تحس ين االس تجابة الزلزالي ة وأقت ري ط
س محت بتخف يض ع دد المخم دات )ح ل اقتص ادي(، تحس ين )رب ط ع دة طواب ق مع ًا( الطريق ة ف ي التوزي ع
استجابة المنشأ، ورفع كفاءة المنشأ ومنعه من االنهيار على شدة زلزالية أعلى.
(SHDمخمد )
حاسب التحكم
مسارعحساس

18
المخمد الهيدروليكي ش به (Kuehn et al. 1999; Neff Patten et al. 1999)اس تخدم الباحث
وتجربة ،( 7-2الشكل )( في جسر مواصالت، 12Volt( والذي يتم تغذيته من خالل بطارية )SAHDاإليجابي )
(، كما اثبتت دراس ة %50لمخمد على مدى عامين. حيث أثبتت الدراس ة ان النظام يخفض االجهاد االعظمي )ا
تخدام الجسر ( أن هذه الطريقة في التحكم تزيد العمر األمن السNCHRPالجمعية الوطنية لبرامج بحوث الطر )
( من كلفة استبدال الجسر.%10عام، وأن كلفة هذا النظام ال تتجاوز ) 50مدة
:(Controllable fluid dampers) المتحكم بلزوجته السائلمخمد
يمكن لهذا الجهاز التحكم بخواص الس ائل الداخلي من خالل إش ارة كهربائية أو مغناطيس ية، وبالتالي
الق درة ب وك ذل ك يتميز، ميزات ه ذه األجهزة أن المكبس هو الجزء الوحي د المتحرك في هوأهم ، قوة التخمي دتع دي ل
قل وذلك بتعريض ه لح، الى مخمد ش به ص لب في ميلي ثانية(مرن الس ريعة على تغير خواص ه )من مخمد لز
كهربائي أو مغناطيسي.
:Electrorheological)مخم د اليوج د نوع ان له ذه األجه زة بحس ب الس ائل المس تخدم فيه ا:
ER مخم دال( ال ذي يح وي س ائل متغي ر اللزوج ة كهربائي ًا، و (Magnetorheological: MR ال ذي )
( الس تخدامه ف ي تطبيق ات الهندس ة ERت م تط وير مخم د ) مغناطيس يًا.يح وي س ائل متغي ر اللزوج ة
Gavin 2001; Gavin et al. 1996; Hanson)المدني ة معظ م ه ذه التط ويرات درس ت م ن قب ل
and Filisko 1996; Leitmann and Reithmeier 1993) .وآخرون
( ERالس ائل الم تحكم بلزوجت ه كهربائي ًا ) ( بإيج اد نم اذ رياض ية لمخم دGavinاهتم ت دراس ة )
_ القاب ل لتع ديل قس اوته وتخمي ده أني ًا _ م ن أج ل عملي ة النمذج ة وال تحكم بالمخم د وم ن ثم ا تجربت ه م ن
الم تحكم ف ي تحس ين اس تجابة المنش آت عل ى ال زالزل خ الل مجموع ة ابني ة وأمثل ة، حي ث اثب ت فاعلي ة
وذل ك لس رعة اس تجابة المخم د )ميل ي ثاني ة(. لك ن االس تطاعة المح دودة له ذا الن وع م ن المخم دات أدت
( ذو س رعة االس تجابة MRلتط وير ن وع مش ابه ه ي مخم دات الس ائل الم تحكم بلزوجت ه مغناطيس يًا )
(.30tonالعالية واالستطاعة التي قد تصل )

19
20( اس تطاعة )MR( مخم د ).Lord coص نع ش ركة )( 20t_MR( جه از )10-2الش كل ) يوض ح
ton( وال ذي يعتب ر أح د أكب ر مخم دات )MRي ة ( الس تخدامه ف ي تطبيق ات الهندس ة المدن(Spencer Jr
et al. 1997) .حيث نالحظ بساطة الجهاز بما أن الجزء المتحرك الوحيد هو المكبس الداخلي
(Spencer Jr et al. 1997)(. 20t_MR)( : أجزاء مخمد 10-2الشكل )
( ER( وذل ك الس تطاعته العالي ة مقارن ة م ع مخم د )ERع ن مخم د ) ( ب ديالً MRيعتب ر مخم د )
( بوس اطة حق ل مغناطيس ي عوض ًا ع ن MRحي ث يعتم د مب دأ عمل ه عل ى ال تحكم بمواص فات س ائل )
كهرب ائي وال ذي يح ول الس ائل م ن حالت ه الس ائلة اللزج ة ال ى حال ه ش به ص لبة ويمنح ه خ واص لزج ة لدن ة
(viscoplastic( يمل ك مخم د .)MR) ب ه بوس اطة تي ار م نخفض مج ال اس تطاعة واس ع يمك ن ال تحكم
( والت ي يمك ن تأمينه ا م ن خ الل بطاري ة. ك ذلك A 2~1( وش دة تيّ ار منخفض ة )V 24~12الجه د )
( بتغيّ ر قلي ل ف ي مقاومته ا. 40ºc~150ºc-( العم ل ف ي درج ات ح رارة متنوع ة )MRتس تطيع مخم دات )
( ف ي MR) مخم دميل ي ثاني ة(. ط ّور 10ص ل ال ى )يمك ن تع ديل خ واص الجه از بس رعة عالي ة ت
(Dyke et al. 1996b) س لوكه. كم ا ت م العدي د م ن ، حي ث اس تخدم نم وذ ميك انيكي بس يط لدراس ة
;Dyke and Spencer Jr 1996)( ف ي MRالدراس ات التحليلي ة والتجريبي ة لع رض فاعلي ة مخم دات )
Dyke and Spencer Jr 1997; Dyke et al. 1996a; Dyke et al. 1996b; Dyke 1996) ،
بي ة لك ن بج زء بس يط م ن حي ث اثبت ت الدراس ات ق درة المخم د عل ى العم ل بش كل يش به أجه زة ال تحكم اإليجا
.قة التي يحتاجها التحكم اإليجابيالطا
20
( الدكتورة المهندس ة في اختص اص تحس ين المنش آت زلزاليًا Shirley Dykeقامت دراس ات الباحثة )
_ القابل لتعديل قس اوته وتخميده أنيًا _، (MRوالتحكم بها وزمال ها بدراس ة مخمد الس ائل المتحكم به مغناطيس يًا )
وجدت مجموعة من النماذ الرياض ية للمخمد تم اعتماد أحدها في الدراس ة التحليلية. كما درس ت طر حيث أ
( ال ذي يقوم بترجم ة أوامر الح اس ب )القوة Clipped optimalالتحكم به ذه المخم دات حي ث طورت متحكم )
س رعته وقدرته على التحكم (. تأتي أهمية المتحكم فيon-offالمطلوبة من المخمد( الى أوامر تحكم كهربائية )
بالمخمد دون الحاجة الس تخدام معادالته الالخطيه المعقدة التي تعتمد على ش دة التيار الكهربائي وانتقال وس رعة
مكبس المخمد النسبية في حساب قوى التخميد وذلك من خالل مقارنة القوة المطلوبة من المخمد بالقوة المتولدة في
ص غر بكثير من الخطوة الزمنية التي يطلب بها حاس ب التحكم القوة وبالتالي يقوم متحكم المخمد في أجزاء زمنية أ
(Clipped optimal بإطفاء الجهاز وتش غيله ض من هذه األجزاء مجبرة الجهاز العمل وفق القوة المطلوبة عندما )
تتحقق شرو االنتقال والسرعة الكافية إلحداث هذه القوة.
به:مخمد االحتكاك المتحكم
خالل القوة يعم ل مخم د االحتك اك على تحوي ل الط اق ة الحركي ة الى حراري ة وب الت الي تخمي د الط اق ة من
المتش كلة في س طح االحتكاك، يمكن تعديل القوة المتولدة في المخمد من خالل إش ارة كهربائية أو ض غط غاز
درس قابلية هذه األجهزة تخفيض االنتقال (Dowdell and Cherry 1994) والذي يغير معامل االحتكاك. في
اس تخدمت (Feng et al. 1993; Fujita et al. 1994)واالنزياي النس بي للمبنى طابقي يتعرض للزالزل، وفي
.Akbay and Aktan 1990; Pandya et al)هذه األجهزة مع العزل الزلزالي لتحس ين أدا ه. طورت أبحاث
(.British Columbia( وذلك في جامعة )controlled slipبه بانزال )جهاز احتكاك يسمح المتحكم (1996
21
:المتحكماتأنواع .2ـ2ـ2
من اس تراتيجيات التحكم في العقدين الماض ّين، وذلك باالعتماد على المعلومات كبيرتم دراس ة عدد
، ونوع االثارة التخميدنوع أجهزة و المتوفرة عن المنش أ المتحكم به، ونموذجه الرياض ي، ونوع القياس ات المتاي فيه،
الديناميكية التي يتعرض لها المنش أ )زالزل، رياي، حركة مركبات...(. يس تطيع كل حل من حلول التحكم أن يلبي
نوعًا محددًا من المنشآت وليس كل األنواع. تَم في هذا الجزء من البحث استعراض أكثر أنواع التحكم استخدامًا في
تطبيقات الهندسة المدنية.
(:Optimal controlتحكم األمثل )ال
)م ش ر يعتمد على متغيرات النظام داء اص غرياً األم ش ر يعرف التحكم االمثل بانه المتحكم الذي يجعل
بأقل جهد ممكن (،-ض متغيرات النظام الديناميكيعب-كاالنزياي النس بي مثاًل وهو م ش ر يرتبط بانتقاالت الطوابق
المطلوبة للتخميد(.)أقل ما يمكن من القوة
Second orderيمك ن إيج اد ق وة ال تحكم به ذه الطريق ة لنظ ام دين اميكي م ن الدرج ة الثاني ة )
dynamic systems اعتم ادًا عل ى م ش ر أداء يمك ن أن يح وي أي م ن معطي ات المبن ى كاالنتق االت )
الطاق ة ف ي المفاص ل والس رع والتس ارعات، أو بع ض مع ايير األداء الكالس يكية كاالنزي اي النس بي أو
اللدنة، أو أي متغيرات يراها المصمم ضرورية.
:ما متحكميوجد هدفين لتصميم
األول(Regulator )( هو جعل النظام الديناميكي مستقرًا وبالتالي إبقاء حالة المبنىSystem
state.ومخرجاته صغيرة ما أمكن )
الثاني هو(Trackerوالذي يجعل مخرجات النظام الدي )( ناميكيOutputs تتبع مسارًا محددًا )
مسبقًا وتبقى حالته محدودة.
(، Linear Quadratic Regulator: LQRأهم نظريات التحكم األمثل هي المتحكم الخطي التربيعي )
Clipped Optimalومتحكم ) (،Linear Quadratic Gaussian: LQGوالمتحكم الخطي التربيعي الغوسي )
control( ومتحكم ،)Bang-Bang control.)

22
(:LQRالتحكم التربيعي الخطي )
دومًا اتخدامهاس نتستخدم هذه الخوارزمية في كال من التحكم اإليجابي والتحكم شبه اإليجابي لكن ال يمك
ومتوفرة، وهذا ص عب بس بب محدودية عدد أجهزة القياس. تتطلب أن تكون جميع حاالت المبنى مقاس ة ذلك ألنها
ع هذه الخوارزمية أخذ ال خطية المنشأ والمخمد في الحسبان.كما ال تستطي
= �⃑�تأخذ معادلة أوامر التحكم ش كل معادلة خطية ) −𝐾 ∗ 𝑥 من هنا أتت تس ميتها بالخطية، حيث )
(K( هي مص فوفة االرجاع والتحكم )feedback( و )𝑥 ( هو ش عاع حاالت المبنى )system states( و )�⃑� )
التي يتحكم بها وهي في حالتنا قوى التحكم. بربط التحكم بالنظام الديناميكي تنتج لدينا هو ش عاع مدخالت المبنى
، الشكل، تعمل وفق السلوك المطلوب.(close loopدارة مغلقة )
ومن ، (1-2) معادلة ،( من خالل تخفيض م ش ر أداء تربيعيKيتم إيجاد مص فوفة االرجاع والتحكم )
هنا أتت تسمية متحكم تربيعي.
(2-1) 𝑱(𝑿, 𝑼) = ∫ (𝑿𝑻(𝝉)∗ 𝑸 ∗ 𝑿𝑻(𝝉) +𝑼𝑻(𝝉) ∗ 𝑹 ∗ 𝑼𝑻(𝝉)) ∗ 𝒅𝝉∞
𝟎
;Agrawal et al. 1998; Fujita et al. 1994 )تم استخدام هذه الخوارزمية في عدد من الدراسات
Kurata et al. 1999; Nagarajaiah and Mate 1998; Sadek and Mohraz 1998; Symans and
Constantinou 1997) ذلك باعتبارها أساسا للمقارنة، وفي و(Symans and Constantinou 1997) تم اجراء
ذه الطريقة في التحكم.تجربة عملية الستخدام ه
تعتب ر طريق ة ال تحكم التربيع ي الخط ي األس اس النظ ري لمجموع ة م ن المتحكم ات ل ذلك اتفق ت
الراس ات عل ى أهمي ة دراس تها والمقارن ة به ا حي ث اثبت ت ق درتها عل ى تحس ين اس تجابة المنش آت بش كل
وذل ك ب الرغم م ن أن ه ذه الطريق ة ملح وظ ف ي ع دة مع ايير كاالنتق ال واالنزي اي النس بي والتس ارع الط ابقي،
بالتحكم ال يمكنها أخذ أثر الالخطيه في المنشأ أو مشَغل التحكم.
تع د ه ذه الطريق ة ص عبة االس تخدام لل تحكم بالمنش آت متع ددة درج ات الحري ة وذل ك لحاجته ا
(( والت ي تص بح R( االس تجابة وأوزان ال تحكم )Qلف رض ع دد كبي ر م ن المعطي ات )مص فوفة اوزان )
معايرتها أصعب كلما زادت درجات الحرية وعدد المشغالت.
23
:(LQG) التحكم التربيعي الخطي الغوسي
( يقوم بإيجاد ش عاع حالة L( راص د ديناميكي )Observerتختلف هذه الطريقة عن س ابقتها بوجود )
تحكم:( من خالل بعض القياسات وليس جميعها حيث تدخل معادلة الراصد في معادالت ال𝑥تقريبي )
( وأداء Robustnessلمتحكم )ل مناعة( وذلك لتأمين L( والرص د )Kيجب حس اب مص فوفتي التحكم )
.على الضجيج الحاصل في أجهزة القياس )ضجيج الحساسات( وأخطاء النمذجة )القصور في النمذجة(عالي
ح اثج ابي ًا في أبتم تطبيق ه ذه النظري ة في ع دد من المنش آت الم دني ة المتحكم به ا ايج ابي ًا وش ب ه اي
(Yi and Dyke 2000; Yoshida et al. 1994).
اثبتت هذه الطريقة في التحكم قابليتها على اس تخدام عدد أقل من الحس اس ات، ومناعة في تحس ين
االس تجابة الزلزالية للمنش آت حيث تقوم هذه الطريقة بالتحكم بإلغاء الخطاء بين القياس الطبيعي )المس جل في
دة بحسابه الراصد الديناميكي( والناتج عن ضجيج الموقع، جو الحساسات( وبين القياس المتوقع حسابيًا )الذي يقوم
الحساسات، أخطاء النمذجة وقصورها عن تمثيل جميع خواص المنشأ الديناميكية.
(:Clipped optimalمتحكم )
( التطبيق العملي للمتحكمين الس ابقين خاص ة في التحكم ش به Clipped optimalتعد طريقة التحكم )
يمكنها اعطاء ال عادًة والتي تعتمد على اس تجابة المنش أ في توليد القوى الالخطيه جهزة التحكماإليجابي حيث أن أ
( و LQRبوس اطة )( Kبعد حس اب مص فوفة التحكم ) يقوم المتحكم، حيث ة المطلوبة بمجرد أمر كهربائيالقو
(LQG )( 3[…والتي تقوم بحس اب القوة المطلوبة,f2,f1=[fdF( يقوم متحكم )d optimalClippe بمقارنة القوة )
المتول دة في جه از المخم د مع القوة المطلوب ة وب الت الي زي ادة أو تخفيض ش دة التي ار بحس ب الح اج ة لزي ادة او
عمل هذا المتحكم حيث يقوم بإطفاء او تش غيل الجهاز بس رعة (11-2الش كل )تخفيض القوة في الجهاز، يوض ح
( وبالتالي الحصول على القوة المطلوبة من الجهاز.تصل الى أجزاء ميلي ثانيةعالية )
24
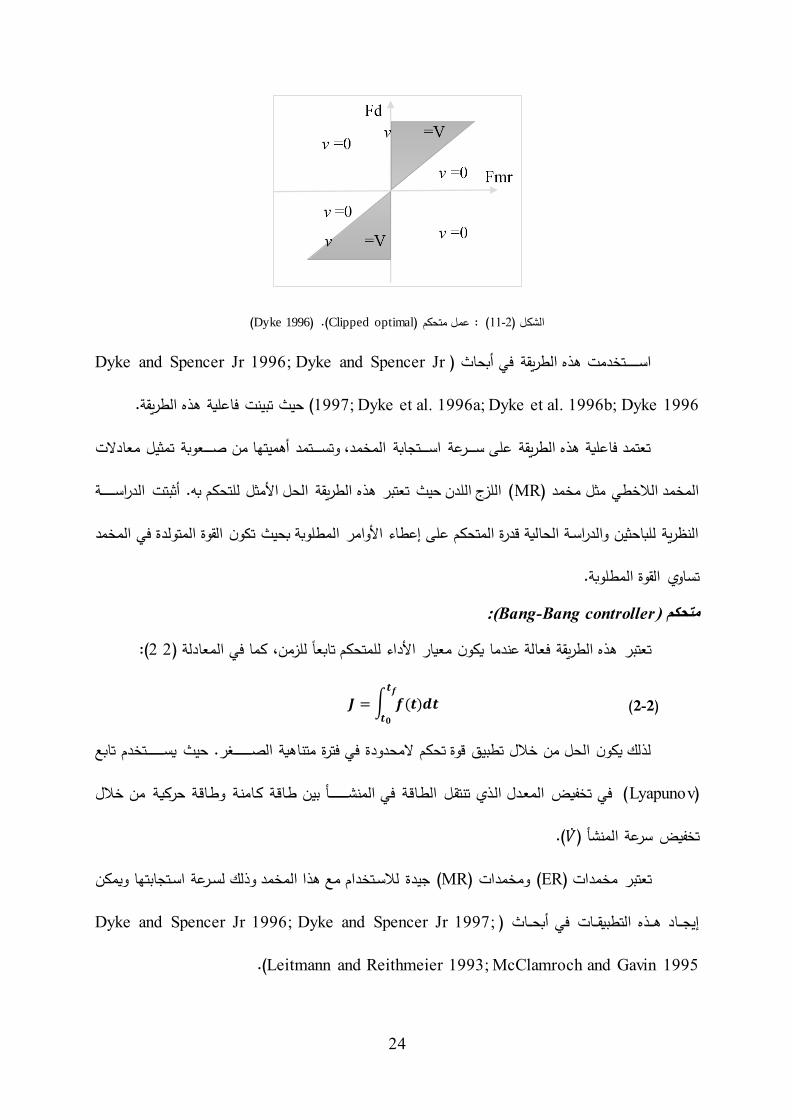
(Dyke 1996. )(Clipped optimal( : عمل متحكم )11-2الشكل )
Dyke and Spencer Jr 1996; Dyke and Spencer Jr)اس تخدمت هذه الطريقة في أبحاث
1997; Dyke et al. 1996a; Dyke et al. 1996b; Dyke 1996) يقة.حيث تبينت فاعلية هذه الطر
تعتمد فاعلية هذه الطريقة على س رعة اس تجابة المخمد، وتس تمد أهميتها من ص عوبة تمثيل معادالت
( اللز اللدن حيث تعتبر هذه الطريقة الحل األمثل للتحكم به. أثبتت الدراس ة MRالمخمد الالخطي مثل مخمد )
خمد ر المطلوبة بحيث تكون القوة المتولدة في المالنظرية للباحثين والدراس ة الحالية قدرة المتحكم على إعطاء األوام
تساوي القوة المطلوبة.
(:Bang-Bang controllerمتحكم )
:(2 2معادلة )كما في ال ،تعتبر هذه الطريقة فعالة عندما يكون معيار األداء للمتحكم تابعًا للزمن
(2-2) 𝑱 = ∫ 𝒇(𝒕)𝒅𝒕𝒕𝒇
𝒕𝟎
لذلك يكون الحل من خالل تطبيق قوة تحكم المحدودة في فترة متناهية الص غر. حيث يس تخدم تابع
(Lyapunov في تخفيض المع دل ال ذي تنتق ل الط اق ة في المنش أ بين ط اق ة ك امن ة وط اق ة حركي ة من خالل )
(.�̇�تخفيض سرعة المنشأ )
لالس تخدام مع هذا المخمد وذلك لس رعة اس تجابتها ويمكن ( جيدة MR( ومخمدات )ERتعتبر مخمدات )
;Dyke and Spencer Jr 1996; Dyke and Spencer Jr 1997) إيج اد ه ذه التطبيق ات في أبح اث
Leitmann and Reithmeier 1993; McClamroch and Gavin 1995).
25
(:Robust control) نيعالتحكم الم
قيمتها بغير الم كدة النظام الديناميكي تبارامترايهدف هذا التحكم إليجاد حل تحكم منيع ض د تغيرات
(. يعتبر النظام الديناميكي للدارة المغلقة من البناء والمتحكم منيعًا مس تقرًا إذا Uncertainض من مجال معَين )
النظام. توب ضمن مجال الشك ببارامتراتحققت شرو األداء المطل
تأتت الحاجة لهذا النوع من التحكم الن نماذ المنش آت تحوي عددًا من المجاهيل الملموس ة والبارامترا
تحكم أهم طر هذا التحكم هي م. تالبارامتراالمشكوك بقيمها والتي يتم نمذجتها عادًة من خالل مجال تغيير هذه
(H∞( ومتحكم ،)Lyapunov( ومتحكم ،)Sliding Mode.)
(:∞Hمتحكم )
( يقوم بحس اب مخرجات النظام Transfer functionيقوم المص مم بإيجاد تابع تحويل يعبر عن المنش أ )
( ال ذي يتعرض إلث ارة دين اميكي ة أق ل من قيم ة مح ددة س ابق ًا. حي ث يكون ه دف المتحكم إيج اد yال دين اميكي )
ولتجع ل الش ر ( مس تقرًا،P) نظ ام ال دين اميكي المتحَكم ب هلتجع ل ال( Kمص فوف ة ارج اع وتحكم )
(‖𝐹1(𝑃,𝐾)‖∞ < ( وذلك الستجابة الدارة المغلقة للنظام والمتحكم.1
( في المج ال الترددي ل ذل ك يمكن اس تخ دام نظ ام مع ادالت ال دين اميكي ة الترددي ة ∞Hيص مم متحكم )
ر معروفة.بسهولة. ويعتبر المتحكم جيد للنظم التي تتعرض إلثارة غي
تم دراس ة هذه المتحكم في زلزاليًا، و المحرض ةمع األبنية اس تخدامهأثر (Yang et al. 1996)درس
وتم اس تخدام هذه الطريقة في األبنية ع حدود أعظمية لالس تجابة والطاقة، وذلك بوض (Yang et al. 2003)ث بح
.(Schmitendorf et al. 1994; Wang 2003) المدنية في أبحاث
Active Stiffness) الص الب ةااليج ابي المتغير ( على النظ ام ∞Hدرس الب احث ان أثر اس تخ دام متحكم )
System حكم في مع ادالت التإدخ اله ا ( لألبني ة التي تتعرض للزالزل. إن ه ذه األنظم ة تحتوي الخطي ه ال يمكن
باإلض افة لمجموعة من المتحكمات حيث أثبت المتحكم فاعلية في بالبحث (∞Hمتحكم )تم اس تخدام اللذلك
تحسين االستجابة الزلزالية، مناعة ضد تغيرات النظام وقصور المعادالت الخطية عن التعبير عن األثر الالخطي.
26
(:Lyapunovمتحكم )
نظام ال( Lyapunov)ف . يعر (Lyapunovيدعى تابع ) موجبمحدد ابع ت يعتمد المص مم على اختيار
. الهدف من للدارة المغلقة للنظام والمتحكم محدد ( س البا وش بهLyapunovمس تقرًا عندما يكون معدل تغير تابع )
( س البًا قدر اإلمكان. تكمن أهمية المتحكم في Lyapunovالمتحكم اختيار مص فوفة تحكم تجعل مش تق تابع )
قدرته على جعل أي متغير يريده المصمم اصغريًا )حاالت النظام، خطأ التحكم، قوة التحكم ...(.
(:Sliding mode controlمتحكم )
يعتبر ه ذا التحكم من أنواع التحكم الالخطي الغير مس تمر، وال ذي يقوم ب الح د من حرك ة ح االت البن اء
جانبيه في فضاء معادالت فضاء الحالة. ( يهتز البناء علىSliding surfaceبالنسبة لسطح )
state( محدد في فض اء الحالة )Sliding surfaceتتطلب الطريقة من المص مم أن يختار س طح )
space ثم يقوم المتحكم بجعل حاالت النظام تس عى نحو هذا الس طح والبقاء في هذه الحالة حتى الرجوع الى .)
بمناعتها العالية.. تمتاز هذه الطريقة الحالة المبدئية
𝜎في هذا المتحكم يقوم بتحقيق الش رطين ) = 𝑆𝑥 = �̇�و ) _معادلة س طح االنزال _ (0 = ( إليجاد 0
V)الش ك ل ( من Lyapunov( يح دد ت ابع )Lyapunovق انون التحكم، بينم ا في طريق ة ) =1
2∗ 𝜎2 ) ويقوم
�̇�المتحكم بجعل مش تق التابع ) = 𝜎 ∗ �̇� = 𝜎 ∗ 𝑆�̇� = 𝜎 ∗ 𝑆(𝐴𝑥 + 𝐵𝑢) ) س البًا وذلك من خالل توابع
غير مستمرة والتي تستخدم معلومات عن المجال الذي تتغير فيه بارامترات النظام الديناميكي للمنشأ.
(testing 2011) :1الدراسة المرجعية _ .3ـ2
( بتع اون مع ع دد من …Richard Christenson & Shirley Dykeق ام ع دد من الب احثون )
,Texas University, University of Colorado at Boulder, University of Connecticutالج امع ات )
Utah State University, Washington University( وم خ ب ر )NEES: Network of Earthquake
Engineering Simulation للبحوث الزلزالية بتجربة مش تركه تهدف للجمع الجهد لتطوير التحكم الش به اإليجابي )
عام ( حيث اس تمر المش روع منMR damper) لزوجةواس طه مخمد الهيدروليكي متغير الب الالخطيهلألبنية
.2010 عام حتى 2005

27
المخمداتزالزل، و لل النموذ الحاس وبي لبناء يخض ع نموذ هجين مكون منقام البحث على تجربة
.والتي يتم تحريضها بواسطة محركات هيدروليكية (،12-2الشكل ) في المخبر، ختبرةالم
(story building-3( في بناء )MRالدراسة الهجينة لمخمدات ): (12-2الشكل )
وذلك لعدة أهداف أهمها:
( إيجاد نموذ رياضي لمخمدMR.المستخدم في دراستنا )
اختب ار ( ع دد من العوام ل مث ل الت أخر الزمنيTime Delayبش ك ل واقعي وحقيقي ) والتجهيزات
.يقي الممكنوالحساسات المستخدمة والضجيج الحق ائيةالكهرب
.تجميع عدد من المتحكمات وتجربتها وهذا ما قام به طالب الجامعات المشاركة
إعطاء نتائج موثوقة ذلك بس بب عدد المتغيرات الكبير والمجاهيل المش كوك بها في مس الة التحكم ش به
اإليجابي.
(testing 2011) نموذج المخمد المستخدم في التحليل المشتق من الدراسة المرجعية: .1ـ3ـ2
كما هو ،(Lord Corporationص نع ش ركه )( 200kN_MR damperتمت التجربة على مخمد )
:تاليةمواصفات الو الذ ،(13-2الشكل )مبين في

28
(Christenson et al. 2007) (Lord Corporation 200kN_MR damper: مخمد )(13-2الشكل )
.(I=2.5A( وشّدة تيار )V=0.1m/secعند سرعة ) (kN 200استطاعة الجهاز ) •
(.inches = 1.47 m 58) الجهازطول •
(.inches=584 mm 23حركة الجهاز )مجال •
(.kN 2.734وزن الجهاز ) •
.(Bang-Bang controller) ةطبواسيتحكم به •
ضها ترتصف عند تعر يحوي ذرات معدنيه ه( المخمد الهيدروليكي التقليدي لكن سائلMRيشبه مخمد ) •
يمكن ضبط هذا الجهاز في (، حيث14-2الشكل )لحقل مغناطيسي بشكل سالسل تكبح الحركة،
( ثانيه ليعطي قوه الكبح المطلوبة.1/1024)
(Christenson et al. 2007)( الهيدروليكي المغناطيسي MR: سائل )(14-2الشكل )
القوة المتولدة في (15-2الش كل )يوض ح مبير،أ( 2.5-0كهربائي ) تياريتم التحكم بالمخمد بوس اطة د.المخمد بتغيير اإلشارة الكهربائية واالنتقال والسرعة ضمن المخم
accumulator
MR fluid
piston
magnetic flux
MR fluidelectromagnetic coil
piston head
1mm annular gap
cylinder housing
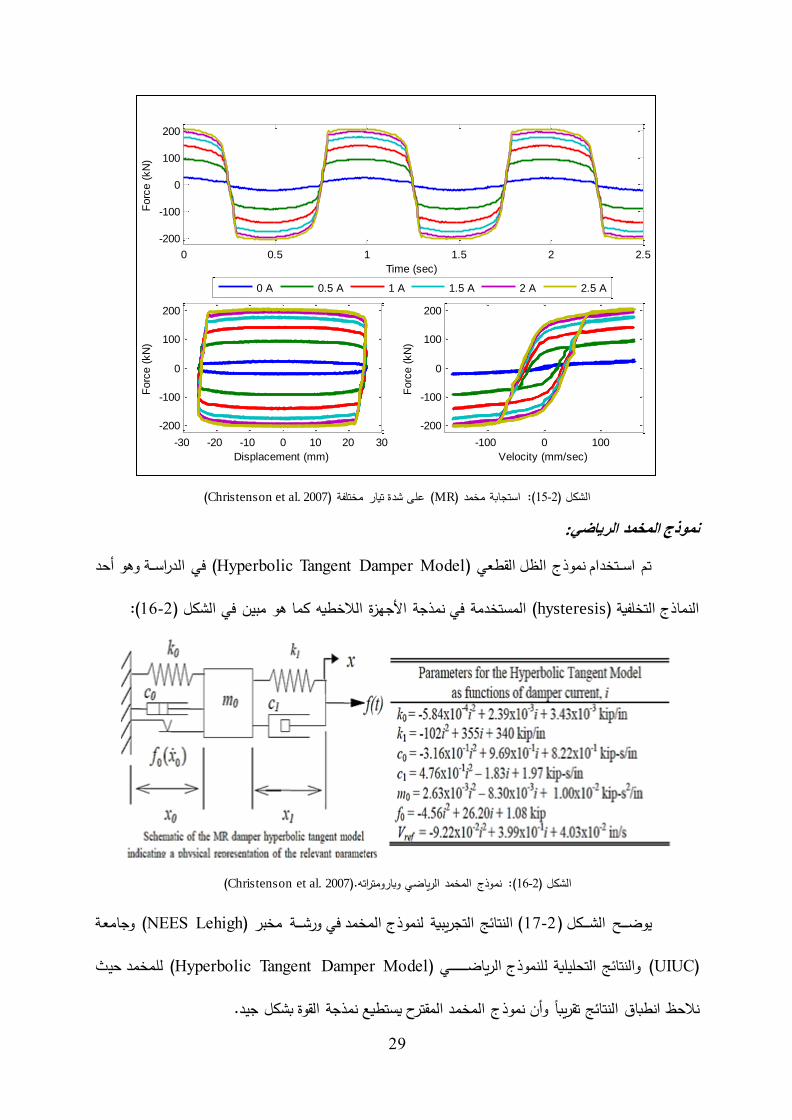
29
(Christenson et al. 2007)( على شدة تيار مختلفة MRاستجابة مخمد ) :(15-2الشكل )
نموذج المخمد الرياضي:
وهو أحد في الدراس ة ( Hyperbolic Tangent Damper Model)تم اس تخدام نموذ الظل القطعي
:(16-2الشكل )كما هو مبين في الالخطيه( المستخدمة في نمذجة األجهزة hysteresisالنماذ التخلفية )
(Christenson et al. 2007)وبارومتراته.: نموذ المخمد الرياضي (16-2الشكل )
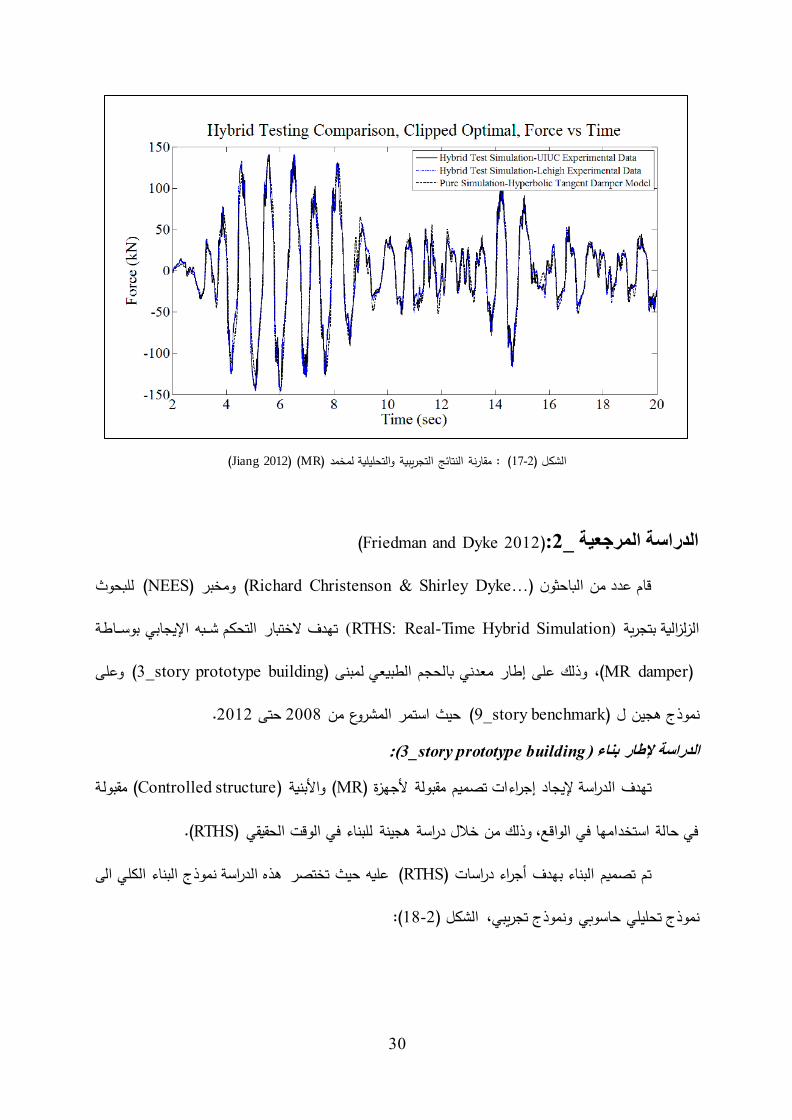
( وجامعة NEES Lehigh( النتائج التجريبية لنموذ المخمد في ورش ة مخبر )17-2الش كل )يوض ح
(UIUC( والنتائج التحليلية للنموذ الرياض ي )Hyperbolic Tangent Damper Model للمخمد حيث )
المخمد المقتري يستطيع نمذجة القوة بشكل جيد.نالحظ انطبا النتائج تقريبًا وأن نموذ
0 0.5 1 1.5 2 2.5
-200
-100
0
100
200
Forc
e (
kN
)
Time (sec)
0 A 0.5 A 1 A 1.5 A 2 A 2.5 A
-30 -20 -10 0 10 20 30
-200
-100
0
100
200
Forc
e (
kN
)
Displacement (mm)
-100 0 100
-200
-100
0
100
200
Forc
e (
kN
)
Velocity (mm/sec)
30
(Jiang 2012)( MR: مقارنة النتائج التجريبية والتحليلية لمخمد )( 17-2الشكل )
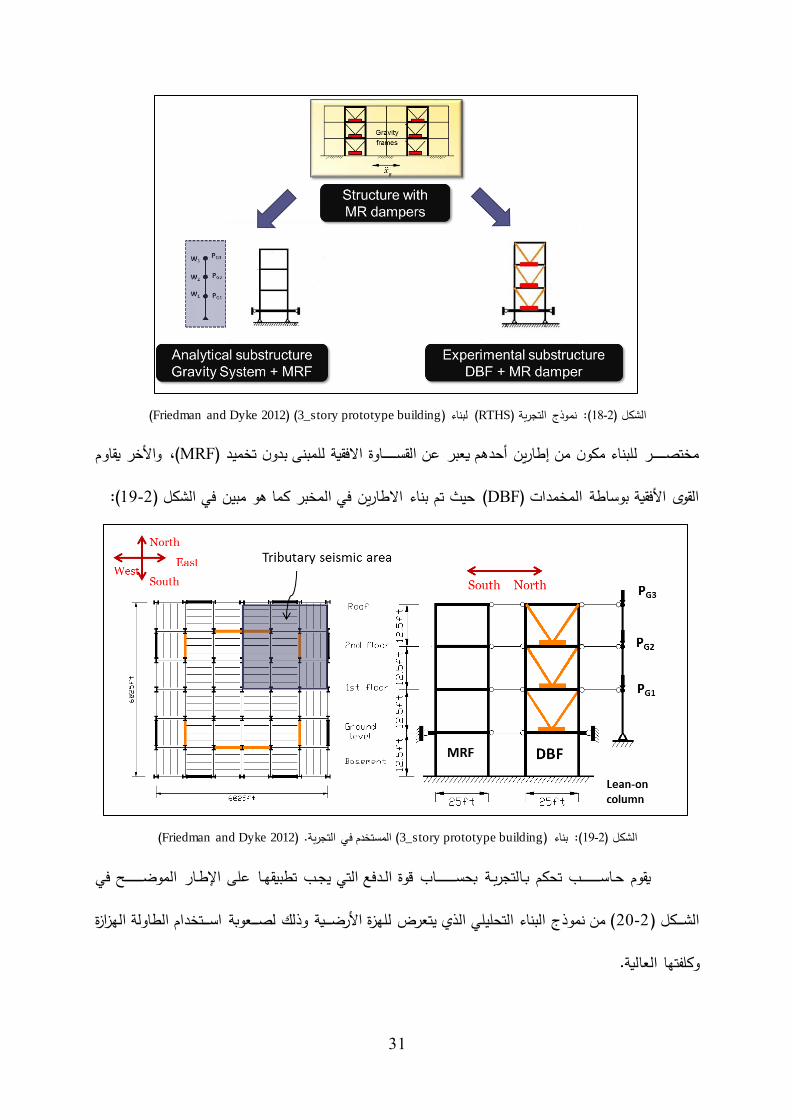
(Friedman and Dyke 2012):2الدراسة المرجعية _
( للبحوث NEESومخبر ) (…Richard Christenson & Shirley Dykeالباحثون )قام عدد من
ةطاتهدف الختبار التحكم ش به اإليجابي بوس (RTHS: Real-Time Hybrid Simulation)الزلزالية بتجربة
(MR damper)إطارعلى ، وذلك ( 3معدني بالحجم الطبيعي لمبنى_story prototype building وعلى )
.2012حتى 2008( حيث استمر المشروع من story benchmark_9نموذ هجين ل )
(:story prototype building_3الدراسة إلطار بناء )
ولة مقب( Controlled structure( واألبنية )MRألجهزة ) مقبولة تهدف الدراسة إليجاد إجراءات تصميم
(.RTHS)في حالة استخدامها في الواقع، وذلك من خالل دراسة هجينة للبناء في الوقت الحقيقي
البناء الكلي الىنموذ الدراسة هذه ختصرت( عليه حيث RTHSتم تصميم البناء بهدف أجراء دراسات )
:(18-2الشكل )، نموذ تحليلي حاسوبي ونموذ تجريبي
31
(Friedman and Dyke 2012) (story prototype building_3( لبناء )RTHS: نموذ التجربة )(18-2الشكل )
(، واألخر يقاوم MRFمختص ر للبناء مكون من إطارين أحدهم يعبر عن القس اوة االفقية للمبنى بدون تخميد )
:(19-2الشكل )طارين في المخبر كما هو مبين في ( حيث تم بناء االDBFالقوى األفقية بوساطة المخمدات )
(Friedman and Dyke 2012) ( المستخدم في التجربة.story prototype building_3: بناء )(19-2الشكل )
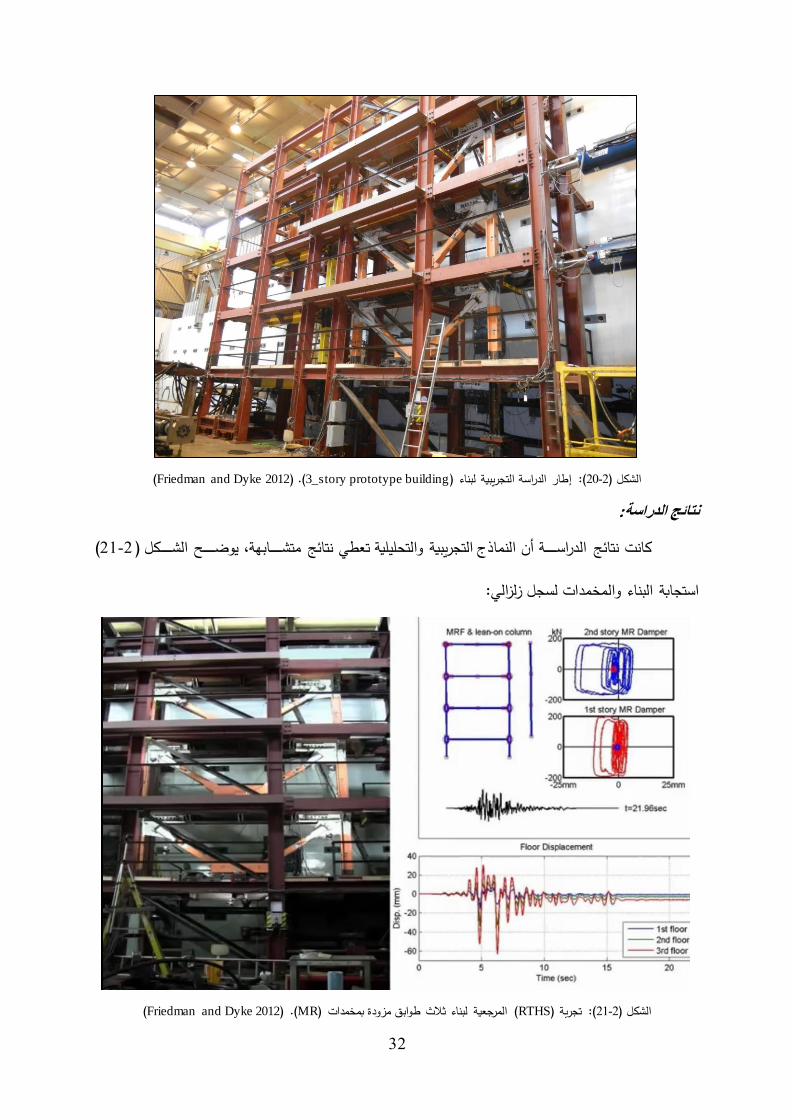
يقوم ح اس ب تحكم ب التجرب ة بحس اب قوة ال دفع التي يج ب تطبيقه ا على اإلط ار الموض ح في
( من نموذ البناء التحليلي الذي يتعرض للهزة األرض ية وذلك لص عوبة اس تخدام الطاولة الهزازة 20-2الش كل )
وكلفتها العالية.
32
(Friedman and Dyke 2012). (story prototype building_3لبناء ) الدراسة التجريبية إطار: (20-2الشكل )
نتائج الدراسة:
( 21-2الش كل )يوض ح الدراس ة أن النماذ التجريبية والتحليلية تعطي نتائج متش ابهة، جكانت نتائ
استجابة البناء والمخمدات لسجل زلزالي:
(Friedman and Dyke 2012). (MR( المرجعية لبناء ثالث طوابق مزودة بمخمدات )RTHS(: تجربة )21-2الشكل )
33
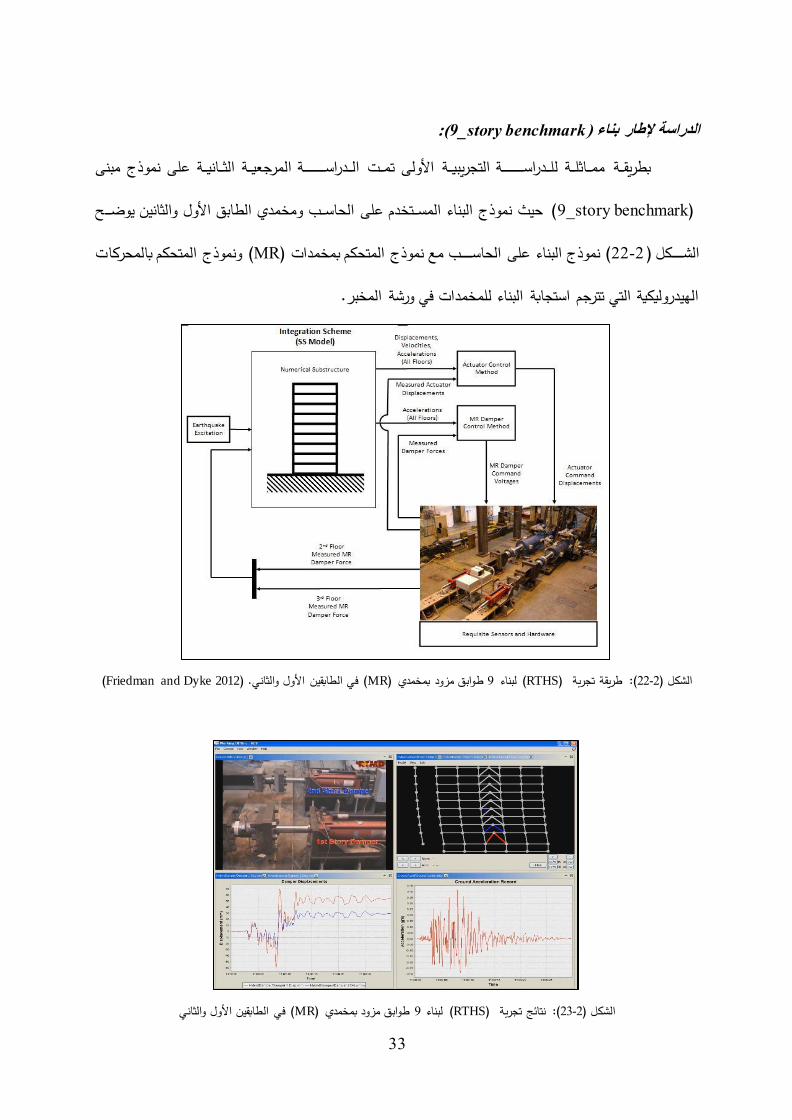
(:story benchmark_9بناء ) إلطارالدراسة
بطريق ة مم اثل ة لل دراس ة التجريبي ة األولى تم ت ال دراس ة المرجعي ة الث اني ة على نموذ مبنى
(9_story benchmark حيث نموذ البناء المس تخدم على الحاس ب ومخمدي الطابق األول والثانين يوض ح )
( ونموذ المتحكم بالمحركات MR( نموذ البناء على الحاس ب مع نموذ المتحكم بمخمدات )22-2الش كل )
الهيدروليكية التي تترجم استجابة البناء للمخمدات في ورشة المخبر.
(Friedman and Dyke 2012). ( في الطابقين األول والثانيMRطوابق مزود بمخمدي ) 9( لبناء RTHS(: طريقة تجربة )22-2الشكل )
( في الطابقين األول والثانيMRد بمخمدي )طوابق مزو 9( لبناء RTHS(: نتائج تجربة )23-2الشكل )
34
(:story benchmark_9والتحليلية لبناء ) ةتطابق النتائج التجريبي
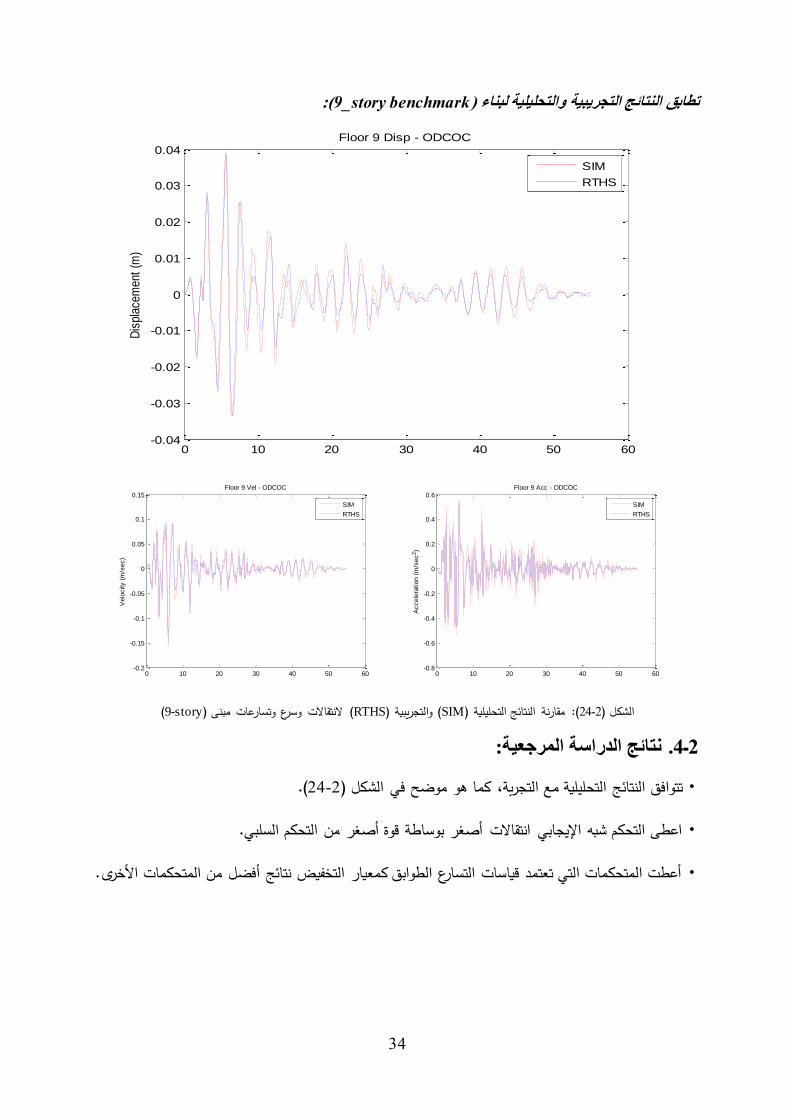
(story-9النتقاالت وسرع وتسارعات مبنى ) (RTHS( والتجريبية )SIM) ةمقارنة النتائج التحليلي(: 24-2الشكل )
نتائج الدراسة المرجعية: .4ـ2
.(24-2الشكل ) ، كما هو موضح فيةالتجربة مع حليليافق النتائج التتو ت •
من التحكم السلبي. أصغرقوة بوساطة أصغراعطى التحكم شبه اإليجابي انتقاالت •
ات األخرى.من المتحكم أفضلأعطت المتحكمات التي تعتمد قياسات التسارع الطوابق كمعيار التخفيض نتائج •
0 10 20 30 40 50 60-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Dis
plac
emen
t (m
)Floor 9 Disp - ODCOC
SIM
RTHS
0 10 20 30 40 50 60-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Accele
ration (
m/s
ec
2)
Floor 9 Acc - ODCOC
SIM
RTHS
0 10 20 30 40 50 60-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Velo
city (
m/s
ec)
Floor 9 Vel - ODCOC
SIM
RTHS

الفصل الثالث
بناء المتحكم باستخدام ماتالب
Building the controller using MATLAB
36
الفصل الثالث
بناء المتحكم باستخدام ماتالب
Building the controller
:مقدمة .1ـ3
ه د يعتم د علي ه، مع أق ل جمنّيع، ذو أداء ع الي، ق اب ل للتطبيق العملي، على بن اء متحكمالتحكم يعتم د
هناك صعوبة في تحقيق ذلك لألسباب التالية:لكن و تحكم.
تنوع أنواع االثارة الديناميكية
القدرة على تحديدها بدقةعدم
في المنشآت الالخطيهوجود
في المخمدات الالخطيهوجود
في نظام المنشأ الديناميكي وعةالمتن تالمجاهيل والبارامترا
.حدود آالت القياس والحساسات
ل هذا الفص س يتم في عديدة. وجود دراس ات هذه المش اكل مفتوحة امام الباحثين بالرغم من اذن تبقى
.حلتصميم المتحكم وطر الفي مشاكل الاستعراض أهم و وفق مراحل( H∞) خوارزمية متحكم باستخدام تصميم
تصميم المتحكم:أهم مشاكل .2ـ3
س يتم التعرف على أهم مش كل تص ميم المتحكم من ناحية نوع االثارة وحدود آالت القياس والحس اس ات
والتغلب على الالخطية في المخمد
المتنوعة: الديناميكيةاالثارة .1ـ2ـ3
ياي األرض ي والر الزلزالي تس ارع الك ومتوقعة عادًة غير معروفةثارة التي يخض ع لها المنش أ تكون األ
، واألحمال الديناميكية كالسيارات واألشخاصالشديدة
لكن و إن ص عوبة معرفة زمن حدوث االثارة وتقييم أثرها الديناميكي ت ثر بش كل كبير على تص ميم متحكم فعال،
على السجالت الزلزالية المتوفرة يمكن إيجاد تقريب من أجل إدخال طبيعة االثارة في تصميم المتحكم. باالعتماد

37
الت القياس والحساسات:حدود آ .2ـ2ـ3ى ويمكن ان ي ثر ذلك علعندما تكون قياس ات مخرجات النظام غير دقيقة تنخفض فاعلية نظام التحكم
على مش كلة أخرى هي عدم القدرةتوجد في تص ميم المتحكم. عدم الدقةاألخذ بعين االعتبار البد لذلك ،االس تقرار
قيم عدد القيم المطلوبة )من أقل حس اس ات ددفي الهندس ة المدنية وعادًة ما يس تخدم ع قيم االس تجابةقياس جميع
لذلك يجب إيجاد راصد ديناميكي يقوم بحساب المجاهيل المطلوبة االنتقال والسرعة والتسارع لكافة درجات الحرية(
من خالل معادالت النظام الديناميكي.
:للمخمدالديناميكي األثر .3ـ2ـ3ن ه مالقوة المطلوب ة أو المكبس في التحكم االيج ابي اإليجابيفي التحكم ش ب ه المخم ديج ب أن يعطي
تحول ناميكية ديخواص المخمد الن ألهذا األمر مستحيل يعتبر لكن في الشرو الحقيقية ،في الحالة المثالية تماماً
أهم المش اكل في من (dF)دون تحقيق القوة المطلوبة ىوص ول مش غل التحكم لطاقته القص و يعتبر ، و دون ذلك
االحتكاك. و ى الناتج عن الوقت الالزم للمكبس لتطبيق القوة المطلوبةالتأخر في تطبيق القو لك ذك، التحكم اإليجابي
االت االنتق ) بن اءعلى حرك ة الالمخم دات ينم ا في أجهزة التحكم ش ب ه اإليج ابي ف إن المش كل ة تكمن في اعتم اد
يجب أدخال خواص المخمد ، لذلكويص عب التحكم بها لذلك ال يمكنها إعطاء القوة المطلوبة منها دوماً (والس رع
ديناميكية في تصميم المتحكم.
حمال الزلزالية بس بب االذلك س تجابة الزلزالية للمنش آت االب ( س ريعة للتحكمالمش ّغل)المخمد يجب ان تكون اس تجابة
.، لذلك يجب أدخال أثر التأخر في استجابة المشّغل في تصميم المتحكمعمتوقالمتغيرة بسرعة وبشكل غير
:(MRمخمد )في ( Hysteresis)أثر التخلفية .4ـ2ـ3المدروس في (MRمخمد )ل خاص ةً في التحكم اإليجابي وش به اإليجابي مهمة جداً ظاهرة التخلفية تعتبر
تثبت ان والتي ات( الس يار )ته في التطبيقات العملية والتأكيد على أهمية تس رعة اس تجابالذي تم اختياره ل هذا البحث
هذه المخمدات واعدة مستقبليًا. مما سيطري تحدين:
األول ادخال أثر التخلفية في حساب المتحكم.
.(MRامر التحكم )امر كهربائي( لتشغيل مخمد )الثاني هو إيجاد
38
لم يتم دراس ة المش كلة األولى بش كل كافي في هندس ة التحكم لكن تم حل المش كلة الثانية في أبحاث
(Dyke 1996) ( بوس اطة متحكمClipped Optimalحيث يتم التحكم بها من خالل مقارنة القوة المطلوبة .)
(Fd) ( بالقوة المتولدةFmr في )( مخمدMR) في أجزاء الميلي ثانية للحص ول واطفا ه من ثم تش غيل الجهاز و
على القوة المطلوبة.
التأخر الزمني للمشغل: .5ـ2ـ3
( أو المخمد عاماًل مهمًا في حس اب المتحكم Actuatorيعتبر عامل التأخر الزمني الس تجابة المش غل )
ثارة التي يخض ع لها المنش أ كالزالزل والرياي الن اهم متطلبات التحكم أن يكون فعل التحكم س ريعًا ذلك أن اإل
اس ة لن ي خذ أثر التأخر الزمني في حس اب المتحكم لكنه س يدخل ر. في هذه الدر مدمث في وقت قص ير بتأثير دتح
.( سريع االستجابةMRفي معادالت مخمد )
(:Uncertain parameters) المؤكدة غيرالبناء تبارامترا .6ـ2ـ3
تبنى معظم المتحكمات اعتمادًا على معادالت المبنى الرياض ية، وذلك لس هولة اش تقاقها من نموذ
اوة بس بب تغير قس الجمل االنش ائية ت(. لكن البد من وجود بعض الش كوك في بارامتراFEMالعناص ر المحدودة )
مواد البناء، أو بس بب اهمال بعض العوامل الديناميكية كالقس اوة تدهور العناص ر االنش ائية عند تش ققها أو بس بب
غير إلثارة إن تعرض البناء ذلك، كن البيتو والتخميد التي ال يمكن تحديدها بدقة ويتم تقديرها عادًة، كعامل مرونة
الغير مرغوب بها والتي تختلف عن ترددات البناء األساسية. يجعله يهتز وفق ترددات هذه االثارة همحدد
يواجه مص مم المتحكم تحديًا كبيرًا ليس تطيع أخذ هذه العوامل في الحس اب حيث يتم ذلك بوس اطة متحكم
(.Robust controlمنيع )
تخدام الماتالب:بناء المتحكم باس .3ـ3
Linearتقديم المبادئ األس اس ّية للتحكم بالنظم الخطّية متعددة المتغيرات )يهدف هذا الجزء من البحث
Multivariable System مع تقديم حلول عملّية لمس ائل التحكم مع تحليل رياض ي دقيق. ومع التركيز على )
التمثيل في فضاء الحالة:

39
الديناميكية للنظام االنشائي مع المخمدات:كتابة معادالت الحركة .1ـ3ـ3
لش كل امعادالت الديناميك الحاكمة لحركة المبنى، يبين معرفة يعتمد حس اب المتحكم بش كل أس اس ي على
( القوى التي يتعرض لها أحد الطوابق حيث نالحظ تولد رد الفعل في المخمد والتربيط الحامل له.3-1)
(Cheng et al. 2010) طابقال مستويالقوة الم ثرة على :(1-3الشكل )
الت الحركة لكل طابق من خال المعادلة التفاضلية التالية:يمكن كتابه معادله الحركة للمبنى بتجميت معاد
(3-1) 𝑴∗ �⃑⃑̈� + 𝑪 ∗ �⃑⃑̇� +𝑲∗ �⃑⃑� = 𝚪 ∗ �⃑⃑� − 𝑴∗ �⃑⃑� ∗ 𝒙�̈�
, �̈�حيث ) �̇� , X⃑⃑ ) المبنىوسرع وتسارعات انتقاالت هي أشعة:
(3-2) �⃑⃑� = [𝒙𝟏𝒙𝟐𝒙𝟑] �⃑⃑̇� = [
𝒙�̇�𝒙�̇�𝒙�̇�
] �⃑⃑̈� = [𝒙�̈�𝒙�̈�𝒙�̈�
]
( هي مصفوفه الكتل المجمعة للمبنى:Mو)
(3-3) 𝐌 = [𝒎𝟏 𝟎 𝟎𝟎 𝒎𝟐 𝟎𝟎 𝟎 𝒎𝟑
]
( مصفوفه التخميد للمبنىCو)( مصفوفه القساوة Kو)
(3-4) 𝐊 = [𝒌𝟏 +𝒌𝟐 −𝒌𝟐 𝟎−𝒌𝟐 𝒌𝟐+𝒌𝟑 −𝒌𝟑𝟎 −𝒌𝟑 𝒌𝟑
] 𝐂 = [𝒄𝟏 𝟎 𝟎𝟎 𝒄𝟐 𝟎𝟎 𝟎 𝒄𝟑
]
عن رد فعل المخمدات على المبنى:عبر ي شعاع( Fو)
(3-5) �⃑⃑� = [
𝒇𝟏𝒇𝟐
𝒇𝟑] , 𝚪 = [
+𝟏 𝟎 𝟎−𝟏 +𝟏 𝟎𝟎 −𝟏 +𝟏
]
Λو) ∗ 𝑥�̈� )عبر عن أثر التسارع الزلزالي على طوابق المبنى:شعاع ي
(3-6) �⃑⃑� ∗ 𝒙�̈� = [𝟏𝟏𝟏] ∗ 𝒙�̈�

40
(Gawronski 2004) تفاضلي الى شكل فضاء الحالة:الشكل التحويل المعادالت من .2ـ3ـ3
ا جراء عمليات معقدة نس بّي تتطلب دراس ة النظم في المجال الزمني معرفة المعادالت التفاض لّية واج
هي معادالت ت فض اء الحالة والتيمعادالت إلى االنتقال إلى وقد دفعت ص عوبة تطبيق هذه التقنيا ،كالتكامالت
خطي ة تف اض لي ة من ال درج ة األولى )تحوي اش تق ا وحي د(. إن ه ذا التمثي ل يحم ل معلوم ات عن ح ال ة النظ ام
ى س بيل المثال( كما يقوم بوص ف النموذ الديناميكي من خالل مدخالته )القوى في ل)انتقاالت وس رع الطوابق ع
تس ارع الجاذبية األرض ية...( ومخرجاته )حس اس ات التس ارع...(. يعتبر التمثيل في فض اء الحالة مناس بًا الطوابق،
ص ميم تكما يمكن اس تخدامها في .لتحليل النظم الديناميكية الخطية متعددة المدخالت والمخرجات والتحكم بها
.اء(سات البناء ومخرجاته قوى التحكم بالبنباعتبار مدخالته حسا )تمثيل المتحكم من خالل فضاء الحالة المتحكم
معادالت التمثيل في فضاء الحالة: .3ـ3ـ3
(:7-3كما في المعادلة ) معادلة الحالة ، االولىيتم تمثيل أي نظام بفضاء الحالة بمعادلتين
(3-7) �⃑⃑̇� = 𝑨𝒓𝒆𝒅 ∗ �⃑⃑� + 𝑩𝒓𝒆𝒅 ∗ �⃑⃑�
= 𝑍الش عاع )ندعو [ 𝑋 , �⃑⃑⃑̇� ] عاع من انتقاالت وهو ش للنظام الديناميكي المدروس ( ش عاع الحالة
معرفة ش عاع مدخالت النظام الديناميكيو (،0t)معرفة ش عاع الحالة في اللحظة عند وس رعات الطوابق،
(�⃑⃑� = [ 𝑥�̈� , 𝐹 ]) ض من المجال الزمني( 0 1,t t) فيمكن عندئذ معرفة(𝑍 (𝑡1)) 1)بش كل وحيد لكل 0t t) .
وتس مح (( 𝑡−1)حالة النظام في اللحظة ) تعبر بش كل مكثف عن ماض ي النظام (0t)أي أن الحالة باللحظة
𝑍 (𝑡)( بعد )nلفضاء من )شعاع الحالة ينتمي حيث .((𝑡1)حالة النظام في اللحظة ) بتحديد مستقبله ∈ 𝑅𝑛.)
:(8-3المعادلة )معادلة القياس والخر كما في الثانية
(3-8) �⃑⃑� = 𝑪𝒓𝒆𝒅 ∗ �⃑⃑� +𝑫𝒓𝒆𝒅 ∗ �⃑⃑� 𝑌)حيث ∈ [𝑍 , �̈�]التي في المبنى ( ش عاع مخرجات النظام الديناميكي ويعبر عن الحس اس ات الموزعة
ش عاع ينتمي . حيثعلى س بيل المثالاالت النظام أو أي مخرجات أخرى للنظام كتس ارعات الطوابق حتقيس
(:9-3، كما في المعادلة )( بعدmلفضاء من )الحالة
(3-9) �⃑⃑� ∈ [𝑿 , �̇� , �̈�] ∈ 𝑹𝒎

41
= �⃑⃑�النظام الديناميكي ) مدخالتيتم عادة فص ل [𝑥�̈� , 𝐹 ]) التي يتم التحكم بها )قوى المخمدات( عن
التالية:( 10-3)المدخالت التي ال يتحكم بها )قوى التسارع الزلزالي( بالمعادالت
(3-10) �⃑⃑̇� = 𝑨𝒓𝒆𝒅 ∗ �⃑⃑� + 𝑩𝒓𝒆𝒅𝟏 ∗ �⃑⃑� + 𝑬𝒓𝒆𝒅 ∗ 𝒙�̈�
�⃑⃑� = 𝑪𝒓𝒆𝒅 ∗ �⃑⃑� + 𝑫𝒓𝒆𝒅𝟏 ∗ �⃑⃑� + 𝑾𝒓𝒆𝒅 ∗ 𝒙�̈�
(Building Reduced Model Systemوب الت الي يكون نظ ام الحرك ة الخطي في ك ل ط ابق للبن اء )
للحص ول على نموذ (lamped mass modelدرجات الحرية بتجميعها في مس توي الطوابق )حيث تم تخفيض
(: 2-3الشكل ) ، والتي يعبر عنها بوساطةالمعادلة ،(Reduced Model System: redمختصر )
(3-11) 𝑺𝒀𝑺𝒔𝒔𝒃𝒖𝒊𝒍𝒅𝒊𝒏𝒈 = 𝒔𝒔(𝑨𝒓𝒆𝒅,𝑩𝒓𝒆𝒅,𝑪𝒓𝒆𝒅,𝑫𝒓𝒆𝒅 ) ( خالل النظ ام ال دين اميكي لينتج ل دين ا uالطريق التي تمر به ا الم دخالت ) (2-3الش ك ل )نالحظ في
( تعبر عن أثر المدخالت على شعاع حالة النظام الديناميكي، والمصفوفة B( نالحظ أن المصفوفة )yالمخرجات )
(Dتعبر عن أثر المدخال )( تu( المباش ر على المخرجات )y( ونالحظ أن المص فوفة ،)A تعبر عن أثر )
(.uاالهتزاز الحر للمنشأ حيث ليس لها عالقة مباشرة بالمدخالت )
النظام الديناميكي لمعادالت فضاء الحالة :(2-3الشكل )
A :مصفوفة الحالة أبعادها)( nn ( فإنn) .ضعف عدد درجات الحرية أو عددعناصر شعاع الحالة
Bمصفوفة التحكم )مصفوفة الدخل( أبعادها :( )n m ( فإنm) عدد مدخالت النظام. Cمصفوفة الرصد أبعادها :( )p n ( فإنp) عدد عدد مخرجات النظام. Dمصفوفة تعبر عن العالقة المباشرة بين الدخل والخر أبعادها :( )p m.
2n: بارامترات النظامعدد n m p n p m )يمكن تمثيل النظام بالرباعّية: , , , )A B C D
u y
A
B C
D
Z Z`
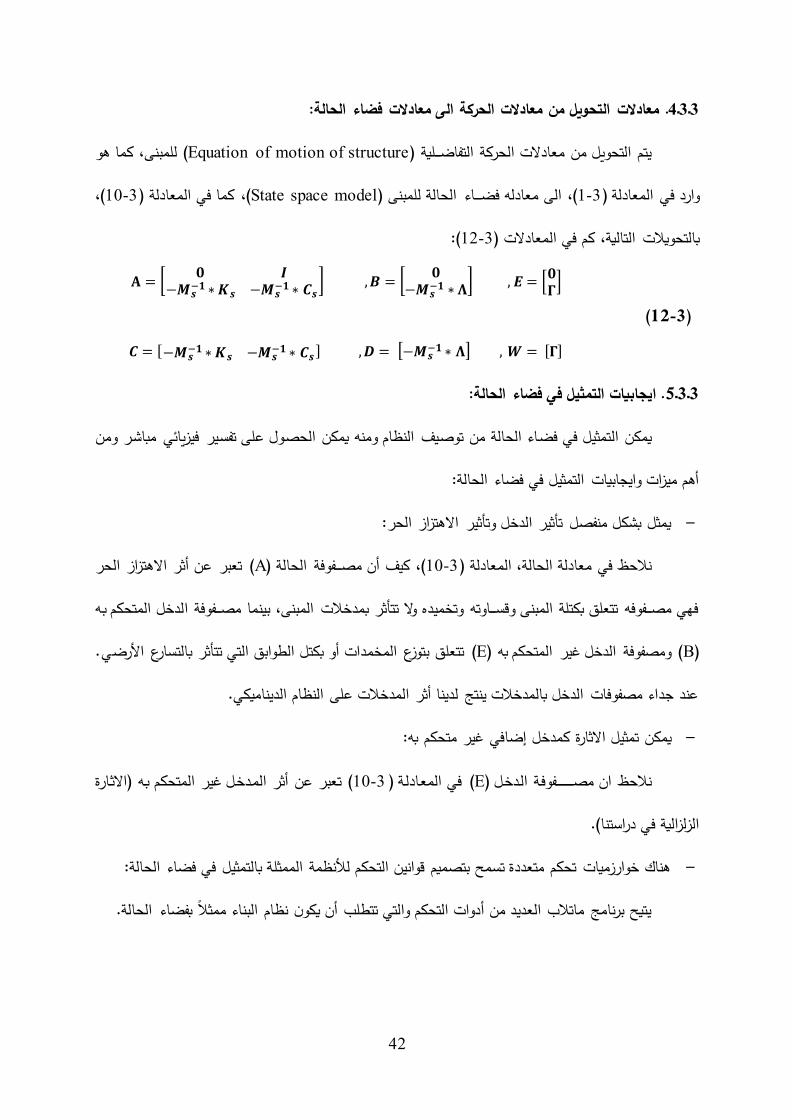
42
معادالت التحويل من معادالت الحركة الى معادالت فضاء الحالة: .4ـ3ـ3
كما هو ،للمبنى( Equation of motion of structure)الحركة التفاض لية يتم التحويل من معادالت
،(10-3) معادلةال كما في ،(State space model) معادله فض اء الحالة للمبنىالى ، (1-3) المعادلة وارد في
:(12-3) معادالتكم في ال، ةالتالي تبالتحويال
(3-12) 𝐀 = [
𝟎 𝑰−𝑴𝒔
−𝟏 ∗𝑲𝒔 −𝑴𝒔−𝟏 ∗ 𝑪𝒔
] ,𝑩 = [𝟎
−𝑴𝒔−𝟏 ∗ 𝚲
] , 𝑬 = [𝟎𝚪]
𝑪 = [−𝑴𝒔−𝟏 ∗𝑲𝒔 −𝑴𝒔
−𝟏 ∗ 𝑪𝒔] ,𝑫 = [−𝑴𝒔−𝟏 ∗ 𝚲] , 𝑾 = [𝚪]
ايجابيات التمثيل في فضاء الحالة: .5ـ3ـ3
من و من توص يف النظام ومنه يمكن الحص ول على تفس ير فيزيائي مباش ر تمثيل في فض اء الحالةيمكن ال
أهم ميزات وايجابيات التمثيل في فضاء الحالة:
:يمثل بشكل منفصل تأثير الدخل وتأثير االهتزاز الحر –
( تعبر عن أثر االهتزاز الحر Aكيف أن مص فوفة الحالة )، (10-3) المعادلة دلة الحالة،نالحظ في معا
لدخل المتحكم به افهي مص فوفه تتعلق بكتلة المبنى وقس اوته وتخميده وال تتأثر بمدخالت المبنى، بينما مص فوفة
(B ومصفوفة الدخل غير المتحكم به )(E )تتعلق بتوزع المخمدات أو بكتل الطوابق التي تتأثر بالتسارع األرضي.
عند جداء مصفوفات الدخل بالمدخالت ينتج لدينا أثر المدخالت على النظام الديناميكي.
:إضافي غير متحكم به كمدخل ثارةيمكن تمثيل اال –
تعبر عن أثر الم دخ ل غير المتحكم ب ه )االث ارة (10-3) المع ادل ة( في Eوف ة ال دخ ل )نالحظ ان مص ف
الزلزالية في دراستنا(.
:الةة بالتمثيل في فضاء الحالممثلهناك خوارزميات تحكم متعددة تسمح بتصميم قوانين التحكم لألنظمة –
يتيح برنامج ماتالب العديد من أدوات التحكم والتي تتطلب أن يكون نظام البناء ممثاًل بفضاء الحالة.
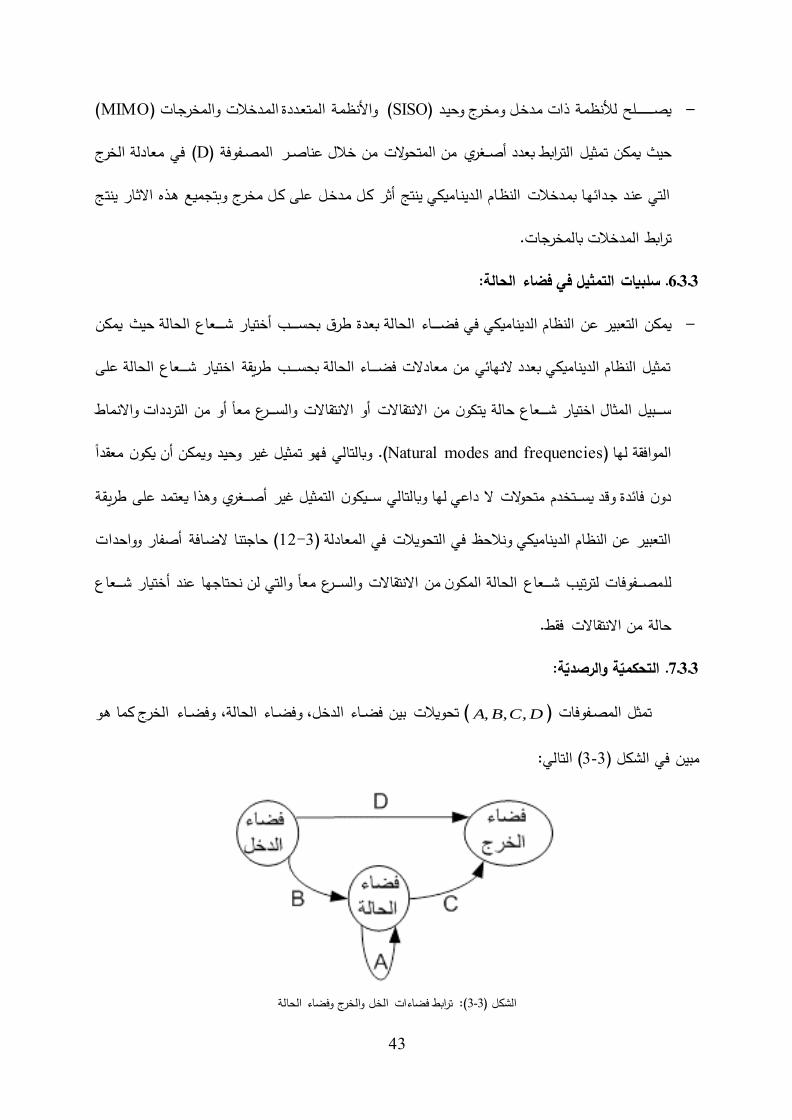
43
( MIMO( واألنظم ة المتع ددة الم دخالت والمخرج ات )SISOيص لح لألنظم ة ذات م دخ ل ومخر وحي د ) –
( في معادلة الخر Dمن خالل عناص ر المص فوفة ) الترابط بعدد أص غري من المتحوالتحيث يمكن تمثيل
التي عن د ج دائه ا بم دخالت النظ ام ال دين اميكي ينتج أثر ك ل م دخ ل على ك ل مخر وبتجميع ه ذه االث ار ينتج
ترابط المدخالت بالمخرجات.
التمثيل في فضاء الحالة: سلبيات .6ـ3ـ3
س ب أختيار ش عاع الحالة حيث يمكن يمكن التعبير عن النظام الديناميكي في فض اء الحالة بعدة طر بح –
تمثيل النظام الديناميكي بعدد النهائي من معادالت فض اء الحالة بحس ب طريقة اختيار ش عاع الحالة على
س بيل المثال اختيار ش عاع حالة يتكون من االنتقاالت أو االنتقاالت والس رع معًا أو من الترددات واالنما
تمثيل غير وحيد ويمكن أن يكون معقداً وبالتالي فهو .(Natural modes and frequenciesالموافقة لها )
طريقة ي وهذا يعتمد علىدون فائدة وقد يس تخدم متحوالت ال داعي لها وبالتالي س يكون التمثيل غير أص غر
( حاجتنا الض افة أص فار وواحدات 12-3المعادلة )التحويالت في التعبير عن النظام الديناميكي ونالحظ في
مص فوفات لترتيب ش عاع الحالة المكون من االنتقاالت والس رع معًا والتي لن نحتاجها عند أختيار ش عاع لل
حالة من االنتقاالت فقط.
:التحكمّية والرصدّية .7ـ3ـ3
DCBA)تمثل المص فوفات الخر كما هو وفض اء ،الحالةوفض اء ،تحويالت بين فض اء الدخل (,,,
التالي: (3-3الشكل )مبين في
(: ترابط فضاءات الخل والخر وفضاء الحالة3-3الشكل )
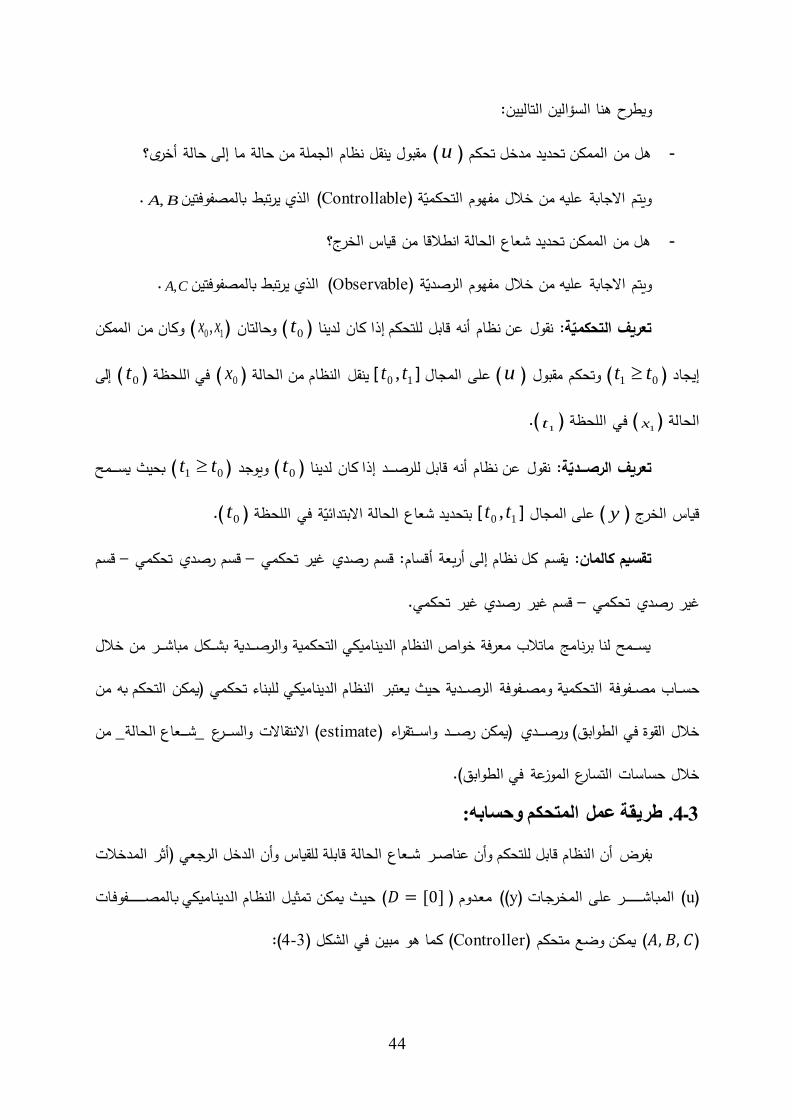
44
التاليين:الس الين هنا ويطري
مقبول ينقل نظام الجملة من حالة ما إلى حالة أخرى؟ (u)تحكم لمدخهل من الممكن تحديد -
.,BAالذي يرتبط بالمصفوفتين (Controllable) مفهوم التحكمّية ويتم االجابة عليه من خالل
هل من الممكن تحديد شعاع الحالة انطالقا من قياس الخر ؟ -
.,CAالذي يرتبط بالمصفوفتين( bservableO)مفهوم الرصدّية عليه من خاللويتم االجابة
10)وحالتان (0t)نقول عن نظام أنه قابل للتحكم إذا كان لدينا :التحكمّيةتعريف , xx) وكان من الممكن
01)إيجاد tt ) وتحكم مقبول(u) 10]على المجال , tt] ينقل النظام من الحالة(0x) في اللحظة(0t) إلى
)الحالة 1x) في اللحظة (
1t).
01)ويوجد (0t)نقول عن نظام أنه قابل للرص د إذا كان لدينا :الرصـــدّيةتعريف tt ) بحيث يس مح
10]على المجال (y)قياس الخر , tt ]بتحديد شعاع الحالة االبتدائّية في اللحظة (0t).
قسم –قسم رصدي تحكمي –: قسم رصدي غير تحكمي م كل نظام إلى أربعة أقساميقس :كالمانتقسيم
قسم غير رصدي غير تحكمي. –غير رصدي تحكمي
يس مح لنا برنامج ماتالب معرفة خواص النظام الديناميكي التحكمية والرص دية بش كل مباش ر من خالل
ن النظام الديناميكي للبناء تحكمي )يمكن التحكم به م حيث يعتبر حس اب مص فوفة التحكمية ومص فوفة الرص دية
_ش عاع الحالة_ من والس رع ت( االنتقاالestimate)واس تقراء خالل القوة في الطوابق( ورص دي )يمكن رص د
.(خالل حساسات التسارع الموزعة في الطوابق
:حسابهو المتحكمعمل طريقة .4ـ3
دخالت )أثر المالدخل الرجعي وأن قابلة للقياس الحالةعناص ر ش عاع وأن لنظام قابل للتحكماأن بفرض
(u( المب اش ر على المخرج ات )y ))مع دوم (𝐷 = ( حي ث يمكن تمثي ل النظ ام ال دين اميكي ب المص فوف ات [0]
(𝐴, 𝐵, 𝐶 وض( يمكن( ع متحكمController) (:4-3الشكل )و مبين في كما ه

45
.النظام الديناميكي للمتحكم الخطي: (4-3الشكل )
( ينتج لدينا القوى المطلوبة من المخمدات من Z⃑( عند جدائه بشعاع الحالة )K)خطي تم استخدام متحكم
= 𝐹المعادلة ) −𝐾 ∗ 𝑍 ):عند تعويض المتحكم في معادالت المبنى
(3-13) �⃑⃑̇� = 𝑨𝒓𝒆𝒅 ∗ �⃑⃑� + 𝑩𝒓𝒆𝒅𝟏∗ �⃑⃑� �⃑⃑̇� = (𝑨𝒓𝒆𝒅 −𝑩𝒓𝒆𝒅𝟏∗𝑲) ∗ �⃑⃑�
أو القيم (System polesب أقط اب النظ ام ال دين اميكي للمبنى ) (16-3) ( ج ذور المع ادل ة𝑠0ت دعى )
.والتي تحدد استجابة المبنى( A( لمصفوفة الحالة )Eigen Valuesالذاتية )
(3-14) 𝐝𝐞𝐭(𝒔𝟎𝜤−𝑨𝒓𝒆𝒅)= 𝟎 هي أقط اب النظ ام ال دين اميكي الج دي د للمبنى مع التحكم حي ث ( 17-3) ( ج ذور المع ادل ةs) نالحظ أن
حلول هذه المعادلة لتعطي االستجابة المطلوبة من المبنى.( s)( يمكن تغيير Kنالحظ بتغيير )
(3-15) 𝐝𝐞𝐭(𝒔𝑰− (𝑨𝒓𝒆𝒅 −𝑩𝒓𝒆𝒅𝟏∗𝑲)) = 𝟎 ( الذي يتيح عدد من الطر لحس اب المتحكم Matlab control toolbox( بوس اطة )Kيتم حس اب )
(K ):اهم هذه الطر هي
(Ogata and Yang 1970) طريقه تغيير أقطاب النظام: .1ـ4ـ3
للمبنى والتي يمكن تطبيقها من خالل طلوبةالم( من االس تجابة sيتم فيها حس اب األقطاب الجديدة )
:(18-3) ( من المعادلةK)مصفوفة التحكم المدخالت المتحكم بها )قوى المتولدة في المخمدات( وبالتالي حساب
(3-16) 𝐝𝐞𝐭(𝒔𝑰− (𝑨𝒓𝒆𝒅−𝑩𝒓𝒆𝒅𝟏∗ 𝑲)) = 𝟎 ⇒ 𝑲
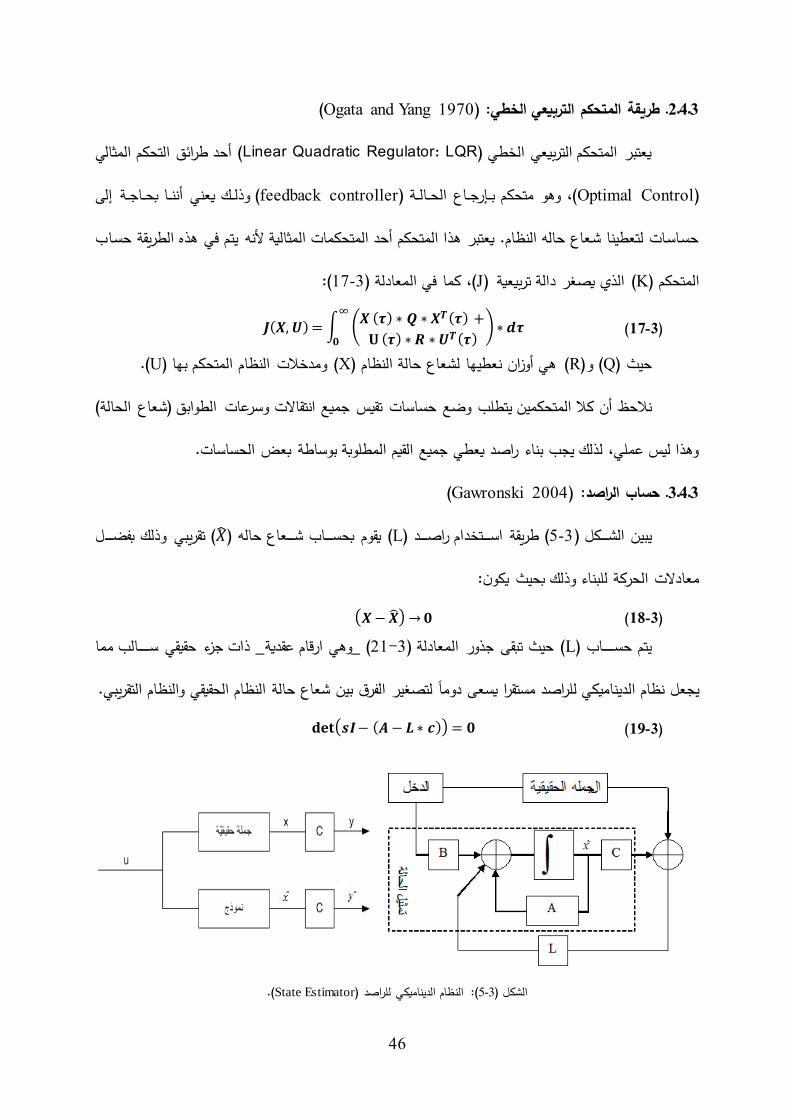
46
(Ogata and Yang 1970) المتحكم التربيعي الخطي:طريقة .2ـ4ـ3
( أحد طرائق التحكم المثاليLinear Quadratic Regulator: LQRيعتبر المتحكم التربيعي الخطي )
(Optimal Control وهو متحكم ب إرج اع الح ال ة ،)(feedback controller ) وذل ك يعني أنن ا بح اج ة إلى
يقة حس اب يتم في هذه الطر حس اس ات لتعطينا ش عاع حاله النظام. يعتبر هذا المتحكم أحد المتحكمات المثالية ألنه
:(17-3) معادلةكما في ال، (Jيصغر دالة تربيعية )( الذي Kالمتحكم )
(3-17) 𝑱(𝑿, 𝑼) = ∫ (𝑿 (𝝉) ∗ 𝑸 ∗ 𝑿𝑻(𝝉) +
𝐔 (𝝉) ∗ 𝑹 ∗𝑼𝑻(𝝉)) ∗ 𝒅𝝉
∞
𝟎
(.Uالمتحكم بها )( ومدخالت النظام Xالنظام ) شعاع حالةل( هي أوزان نعطيها Rو) (Qحيث )
وضع حساسات تقيس جميع انتقاالت وسرعات الطوابق )شعاع الحالة( أن كال المتحكمين يتطلبنالحظ
وهذا ليس عملي، لذلك يجب بناء راصد يعطي جميع القيم المطلوبة بوساطة بعض الحساسات.
(Gawronski 2004) حساب الراصد: .3ـ4ـ3
ل �̂�) ش عاع حاله( يقوم بحس اب Lاس تخدام راص د )ة ( طريق5-3الش كل )يبين ( تقريبي وذلك بفض
معادالت الحركة للبناء وذلك بحيث يكون:
(3-18) (𝑿− �̂�) →𝟎
ذات جزء حقيقي س الب مما _وهي ارقام عقدية_ (21-3) ( حيث تبقى جذور المعادلةLيتم حس اب )
مستقرا يسعى دومًا لتصغير الفر بين شعاع حالة النظام الحقيقي والنظام التقريبي.يجعل نظام الديناميكي للراصد
(3-19) 𝐝𝐞𝐭(𝒔𝑰− (𝑨 − 𝑳 ∗ 𝒄)) = 𝟎
(.State Estimatorالنظام الديناميكي للراصد ): (5-3الشكل )
47
( ليعطي القوة L( وراص د )K( النظام الديناميكي النهائي للبناء بإض افة متحكم )6-3)الش كل يوض ح
.(MR damperالمطلوبة من مخمدات )
النظام الديناميكي للبناء مع راصد ومتحكم(: 6-3)الشكل
:(LQRتطوير متحكم ) .4ـ4ـ3
نظرًا ألهمية هذه الطريقة بأعتبارها األس اس النظري خلف معظم المتحكمات وبس اطتها نالحظ اعتمادها
بناء المعياري ( لدراس ة أثره على الLQRير متحكم )من قبل أغلب الدراس ات في عملية المقارنة، حيث تم تطو
طوابق. 3المكون من
( مص فوفة وزن المخرجات )انتقاالت Qتعتمد هذه الطريقة على إيجاد مص فوفتي الوزن المناس بتين: )
(، كما في المعادلة J( مص فوفة وزن المدخالت )قوى التخميد( اللتان تدخالن في حس اب الدالة )Rالطوابق( و)
، ثم حس اب مص فوفة ( والتي تعبر عن مقدار الخطأ وكلفة التحكم الذان يجب أن يكونا أص غر ما يمكن3-19)
( والتي عند ض ربها بش عاع الحالة في لحظة معينة ينتج لدينا قوى التحكم المطلوبة في الخطوة التي Kالتحكم )
.تليها
( بحي ث Rاالنتق االت كبيرًا، وأختي ار )( تكون كبيرة بحي ث يكون الخط أ الن اتج عن Qيتم ع ادًة أختي ار )
بحيث تكون كلفة التحكم )مقدار القوى المطلوبة( أص غر ما يمكن، لكن هذه الطريقة التفلح تكون قيمتها ص غيرة
( بحي ث يطل ب R( و)Qدوم ًا في إيج اد متحكم أمثلي يخفض االنتق االت بقوة تحكم ص غيرة وتحت ا لمع ايرة )
خمدات ويخفض االنتقاالت للحد األدنى.المتحكم قوى ضمن استطاعة الم
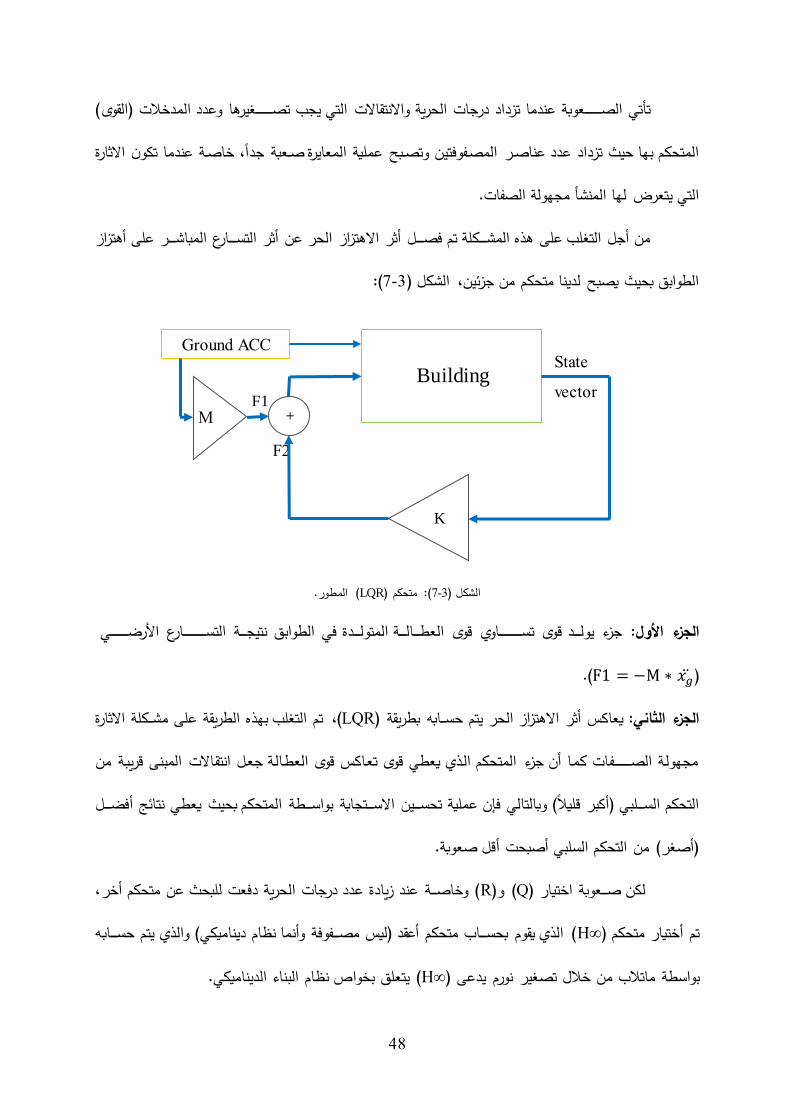
48
تأتي الص عوبة عندما تزداد درجات الحرية واالنتقاالت التي يجب تص غيرها وعدد المدخالت )القوى(
المتحكم بها حيث تزداد عدد عناص ر المص فوفتين وتص بح عملية المعايرة ص عبة جدًا، خاص ة عندما تكون االثارة
.فاتالص التي يتعرض لها المنشأ مجهولة
من أجل التغلب على هذه المش كلة تم فص ل أثر االهتزاز الحر عن أثر التس ارع المباش ر على أهتزاز
:(7-3الشكل )، الطوابق بحيث يصبح لدينا متحكم من جزئين
.( المطورLQRمتحكم )(: 7-3الشكل )
جزء يول د قوى تس اوي قوى العط ال ة المتول دة في الطوابق نتيج ة التس ارع األرض ي :الجزء األول
(F1 = −M ∗ 𝑥�̈�).
على مش كلة االثارة بهذه الطريقة تم التغلب ،(LQRيعاكس أثر االهتزاز الحر يتم حس ابه بطريقة ) :الجزء الثاني
مجهول ة الص ف ات كم ا أن جزء المتحكم ال ذي يعطي قوى تع اكس قوى العط ال ة جع ل انتق االت المبنى قريب ة من
ائج أفض ل متحكم بحيث يعطي نتالتحكم الس لبي )أكبر قلياًل( وبالتالي فإن عملية تحس ين االس تجابة بواس طة ال
)أصغر( من التحكم السلبي أصبحت أقل صعوبة.
،( وخاص ة عند زيادة عدد درجات الحرية دفعت للبحث عن متحكم أخرR( و)Q)لكن ص عوبة اختيار
( الذي يقوم بحس اب متحكم أعقد )ليس مص فوفة وأنما نظام ديناميكي( والذي يتم حس ابه ∞Hتم أختيار متحكم )
( يتعلق بخواص نظام البناء الديناميكي.∞Hماتالب من خالل تصغير نورم يدعى ) بواسطة
Building
Ground ACC
+
K
M F1
F2
State
vector
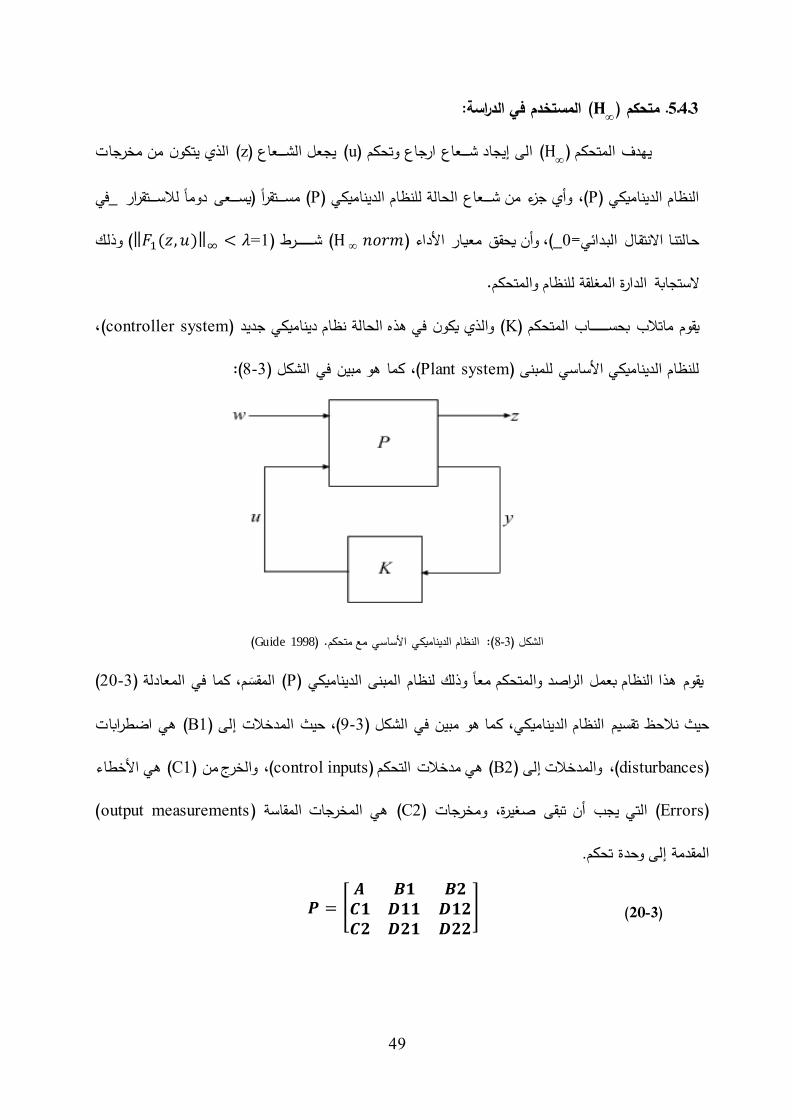
49
𝚮متحكم ) .5ـ4ـ3∞
( المستخدم في الدراسة:
Η) يهدف المتحكم∞
مخرجات ( الذي يتكون منz( يجعل الش عاع )u)إيجاد ش عاع ارجاع وتحكم ( الى
)يس عى دومًا لالس تقرار _في مس تقراً (P)للنظام الديناميكي أي جزء من ش عاع الحالة و ، (Pالنظام الديناميكي )
∞ Η، وأن يحقق معي ار األداء )_(0ح التن ا االنتق ال الب دائي 𝑛𝑜𝑟𝑚( ش ر )‖𝐹1(𝑧, 𝑢)‖∞ < 𝜆=1 وذل ك )
الدارة المغلقة للنظام والمتحكم. الستجابة
(، controller system( والذي يكون في هذه الحالة نظام ديناميكي جديد )Kيقوم ماتالب بحس اب المتحكم )
:(8-3الشكل )كما هو مبين في (،Plant systemللنظام الديناميكي األساسي للمبنى )
(Guide 1998) .النظام الديناميكي األساسي مع متحكم(: 8-3الشكل )
(20-3) المعادلةكما في ، ممقسَ ( الP)ديناميكي المبنى اليقوم هذا النظام بعمل الراصد والمتحكم معًا وذلك لنظام
اضطرابات هي( B1) ىإل المدخالت حيث، (9-3الشكل )كما هو مبين في ، حيث نالحظ تقسيم النظام الديناميكي
(disturbances)، إلى والمدخالت (B2 )تحكمال مدخالت هي (control inputs) ،منخر وال (C1 )األخطاء هي
(Errors )ومخرجات صغيرة، أن تبقى التي يجب (C2 )هي ( المخرجات المقاسةoutput measurements)
.إلى وحدة تحكم المقدمة
(3-20) 𝑷 = [𝑨 𝑩𝟏 𝑩𝟐𝑪𝟏 𝑫𝟏𝟏 𝑫𝟏𝟐𝑪𝟐 𝑫𝟐𝟏 𝑫𝟐𝟐
]
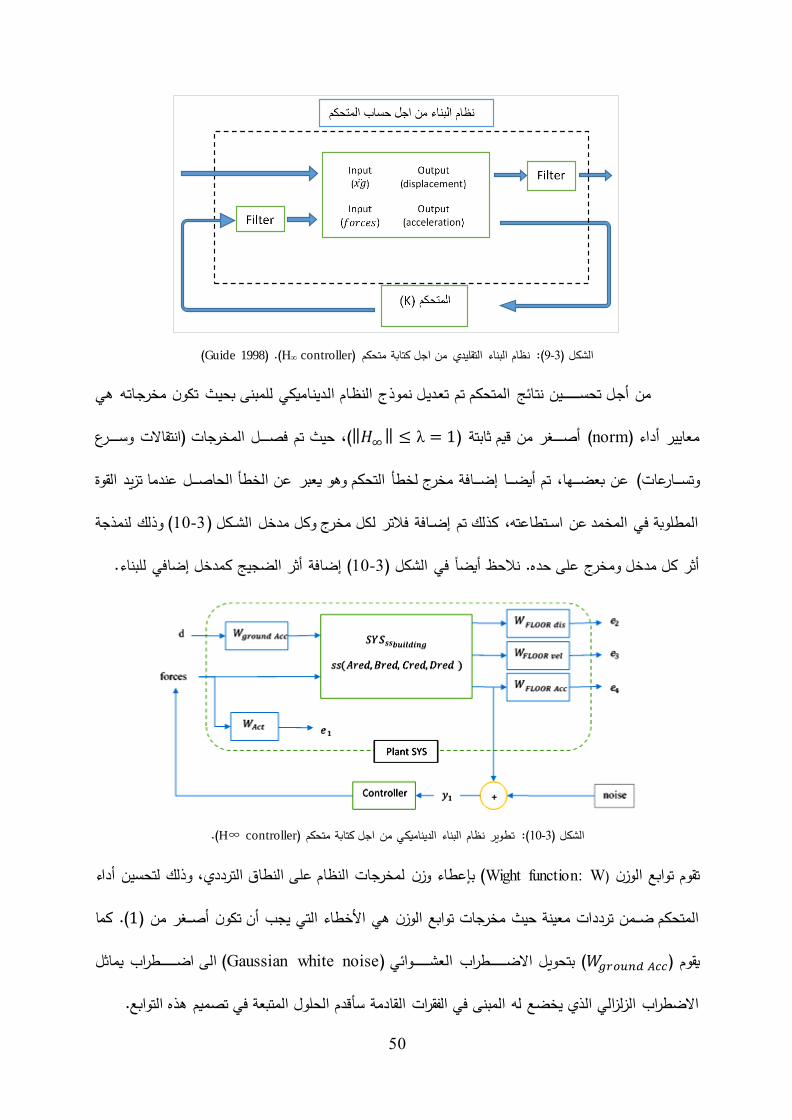
50
(Guide 1998) .(controller ∞H) متحكمالتقليدي من اجل كتابة : نظام البناء (9-3الشكل )
من أج ل تحس ين نت ائج المتحكم تم تع دي ل نموذ النظ ام ال دين اميكي للمبنى بحي ث تكون مخرج ات ه هي
‖∞𝐻‖أص غر من قيم ثابتة ) (norm) أداءمعايير ≤ λ = وس رع ، حيث تم فص ل المخرجات )انتقاالت (1
عن بعض ها، تم أيض ا إض افة مخر لخطأ التحكم وهو يعبر عن الخطأ الحاص ل عندما تزيد القوة وتس ارعات(
( وذلك لنمذجة 10-3الش كل )المطلوبة في المخمد عن اس تطاعته، كذلك تم إض افة فالتر لكل مخر وكل مدخل
إضافة أثر الضجيج كمدخل إضافي للبناء.( 10-3الشكل ). نالحظ أيضًا في هأثر كل مدخل ومخر على حد
.(H∞ controllerتطوير نظام البناء الديناميكي من اجل كتابة متحكم ): (10-3الشكل )
وذلك لتحسين أداء ،( بإعطاء وزن لمخرجات النظام على النطا التردديWight function: W) تقوم توابع الوزن
(. كما 1المتحكم ض من ترددات معينة حيث مخرجات توابع الوزن هي األخطاء التي يجب أن تكون أص غر من )
( الى اض طراب يماثل Gaussian white noise( بتحويل االض طراب العش وائي )𝑊𝑔𝑟𝑜𝑢𝑛𝑑 𝐴𝑐𝑐يقوم )
.قادمة سأقدم الحلول المتبعة في تصميم هذه التوابعاالضطراب الزلزالي الذي يخضع له المبنى في الفقرات ال
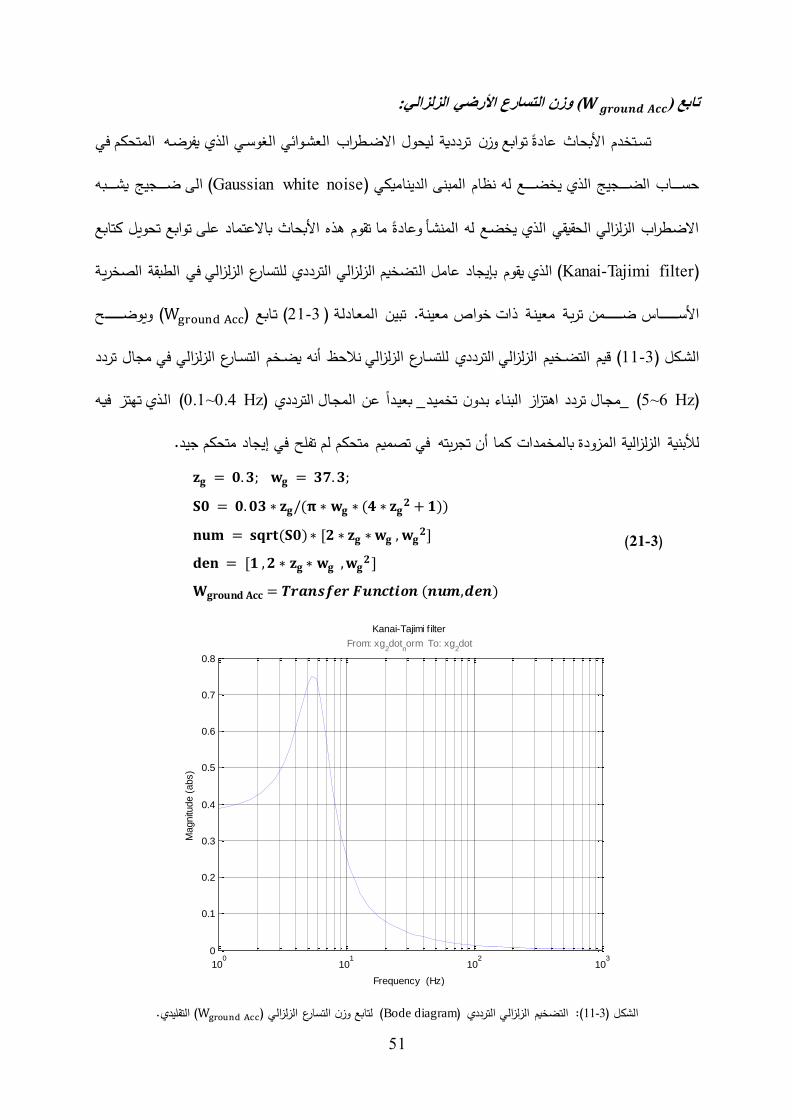
51
( وزن التسارع األرضي الزلزالي:𝑾𝒈𝒓𝒐𝒖𝒏𝒅 𝑨𝒄𝒄تابع )
تس تخدم األبحاث عادًة توابع وزن ترددية ليحول االض طراب العش وائي الغوس ي الذي يفرض ه المتحكم في
( الى ض جيج يش به Gaussian white noiseحس اب الض جيج الذي يخض ع له نظام المبنى الديناميكي )
تابع كاالض طراب الزلزالي الحقيقي الذي يخض ع له المنش أ وعادًة ما تقوم هذه األبحاث باالعتماد على توابع تحويل
(Kanai-Tajimi filter الذي يقوم بإيجاد عامل )تضخيم الزلزالي الترددي للتسارع الزلزالي في الطبقة الصخرية ال
يوض ح( و Wground Acc)ت ابع (21-3) مع ادل ةالة ذات خواص معين ة. تبين األس اس ض من ترب ة معين
جال تردد لتس ارع الزلزالي في منالحظ أنه يض خم اقيم التض خيم الزلزالي الترددي للتس ارع الزلزالي (11-3الش كل )
(5~6 Hz ) _عن المج ال الترددي اً بعي د_مج ال تردد اهتزاز البن اء ب دون تخمي د (0.4~0.1 Hz) هفي ال ذي تهتز
كما أن تجربته في تصميم متحكم لم تفلح في إيجاد متحكم جيد. المزودة بالمخمدات لألبنية الزلزالية
(3-21)
𝐳𝐠 = 𝟎.𝟑; 𝐰𝐠 = 𝟑𝟕.𝟑;
𝐒𝟎 = 𝟎.𝟎𝟑 ∗ 𝐳𝐠/(𝛑 ∗ 𝐰𝐠 ∗ (𝟒 ∗ 𝐳𝐠𝟐 +𝟏))
𝐧𝐮𝐦 = 𝐬𝐪𝐫𝐭(𝐒𝟎)∗ [𝟐 ∗ 𝐳𝐠 ∗𝐰𝐠 , 𝐰𝐠𝟐]
𝐝𝐞𝐧 = [𝟏 ,𝟐 ∗ 𝐳𝐠 ∗ 𝐰𝐠 ,𝐰𝐠𝟐]
𝐖𝐠𝐫𝐨𝐮𝐧𝐝 𝐀𝐜𝐜 = 𝑻𝒓𝒂𝒏𝒔𝒇𝒆𝒓 𝑭𝒖𝒏𝒄𝒕𝒊𝒐𝒏 (𝒏𝒖𝒎,𝒅𝒆𝒏)
Wground( لتابع وزن التسارع الزلزالي )Bode diagramالتضخيم الزلزالي الترددي )(: 11-3الشكل ) Acc) التقليدي.
100
101
102
103
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
From: xg2dot
norm To: xg
2dot
Magnitu
de (
abs)
Kanai-Tajimi f ilter
Frequency (Hz)
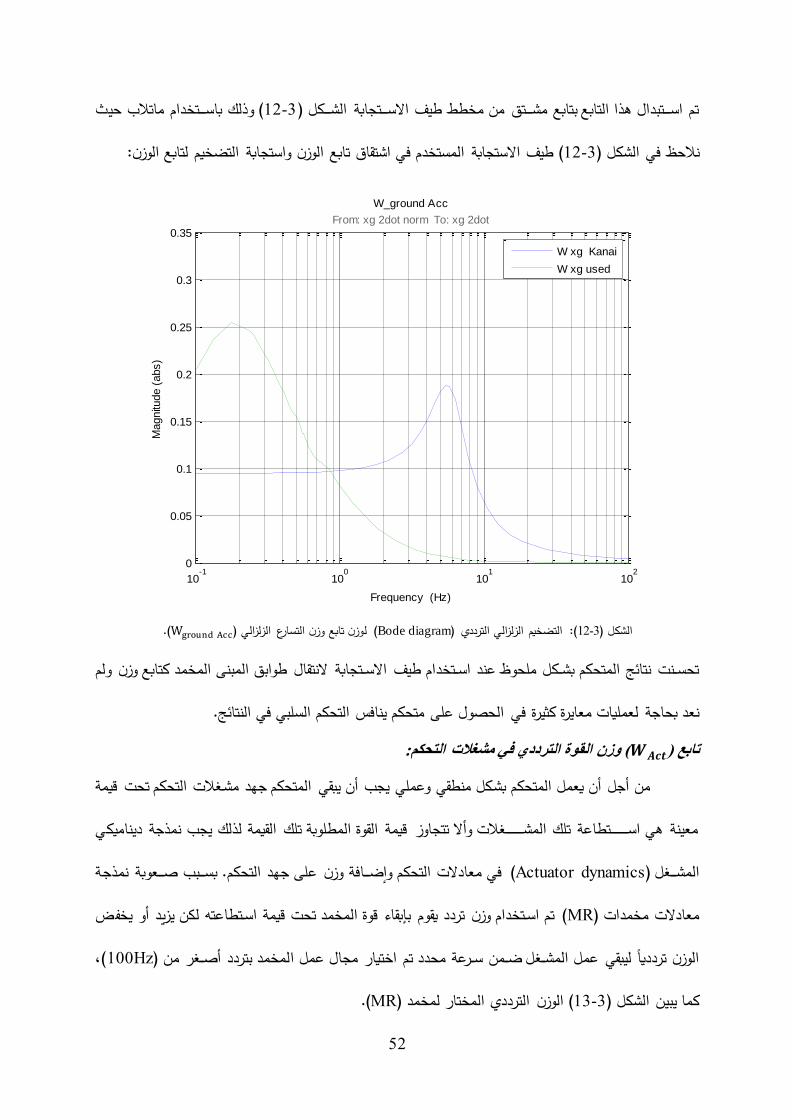
52
( وذلك باس تخدام ماتالب حيث 12-3الش كل )تم اس تبدال هذا التابع بتابع مش تق من مخطط طيف االس تجابة
طيف االستجابة المستخدم في اشتقا تابع الوزن واستجابة التضخيم لتابع الوزن:( 12-3الشكل )نالحظ في
Wgroundزن التسارع الزلزالي )( لوزن تابع و Bode diagramالتضخيم الزلزالي الترددي )(: 12-3الشكل ) Acc).
ابع وزن ولم كت النتقال طوابق المبنى المخمد تحس نت نتائج المتحكم بش كل ملحوظ عند اس تخدام طيف االس تجابة
الحصول على متحكم ينافس التحكم السلبي في النتائج. نعد بحاجة لعمليات معايرة كثيرة في
:في مشغالت التحكم الترددي ( وزن القوة𝑾𝑨𝒄𝒕تابع )
من أجل أن يعمل المتحكم بش كل منطقي وعملي يجب أن يبقي المتحكم جهد مش غالت التحكم تحت قيمة
معينة هي اس تطاعة تلك المش غالت وأال تتجاوز قيمة القوة المطلوبة تلك القيمة لذلك يجب نمذجة ديناميكي
ض افة و Actuator dynamicsالمش غل ) زن على جهد التحكم. بس بب ص عوبة نمذجة ( في معادالت التحكم واج
( تم اس تخدام وزن تردد يقوم بإبقاء قوة المخمد تحت قيمة اس تطاعته لكن يزيد أو يخفض MRمعادالت مخمدات )
(، 100Hzلمخمد بتردد أص غر من )الوزن تردديًا ليبقي عمل المش غل ض من س رعة محدد تم اختيار مجال عمل ا
(.MRالمختار لمخمد ) يالوزن التردد( 13-3الشكل )كما يبين
10-1
100
101
102
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
From: xg 2dot norm To: xg 2dot
Magnitu
de (
abs)
W_ground Acc
Frequency (Hz)
W xg Kanai
W xg used

53
.(W Actuator) رد فعل المشغلتابع وزن ( لBode diagramالتضخيم الترددي ) (:13-3الشكل )
تجربة عدة مجاالت للس رعة التي يعمل بها المخمد للوص ول للمجال األفض ل حيث تبين أثر هذا الوزن تم
في إبقاء عمل المخمد بمجال قوة معين وسرعة معينة تجعل نتائج التحكم أفضل.
:( وزن تسارع الطوابق𝑾𝒇𝒍𝒐𝒐𝒓 𝑨𝒄𝒄تابع )
ماد حس اب تابع الوزن لتس ارعات الطوابق باالعت تم بطريقة مش ابهة لحس اب وزن التس ارع األرض ي الزلزالي
( حيث تم اختيار مغلف amplitude spectrumعلى طيف التس ارع الس تجابة البناء المدروس للطابق األخير )
:(14-3الشكل )باستخدام ماتالب كما هو مبين في لطيف االستجابة تم على أثره حساب تابع الوزن الترددي
W𝑓𝑙𝑜𝑜𝑟تابع وزن تسارع الطوابق )( لBode diagramالتضخيم الترددي ) (:14-3الشكل ) Acc).
101
102
103
104
0
100
200
300
400
500
600
700
800
900
1000
1100
From: x 2dot To: x 2dot_norm
Magnitu
de (
abs)
W_floor Acc
Frequency (Hz)
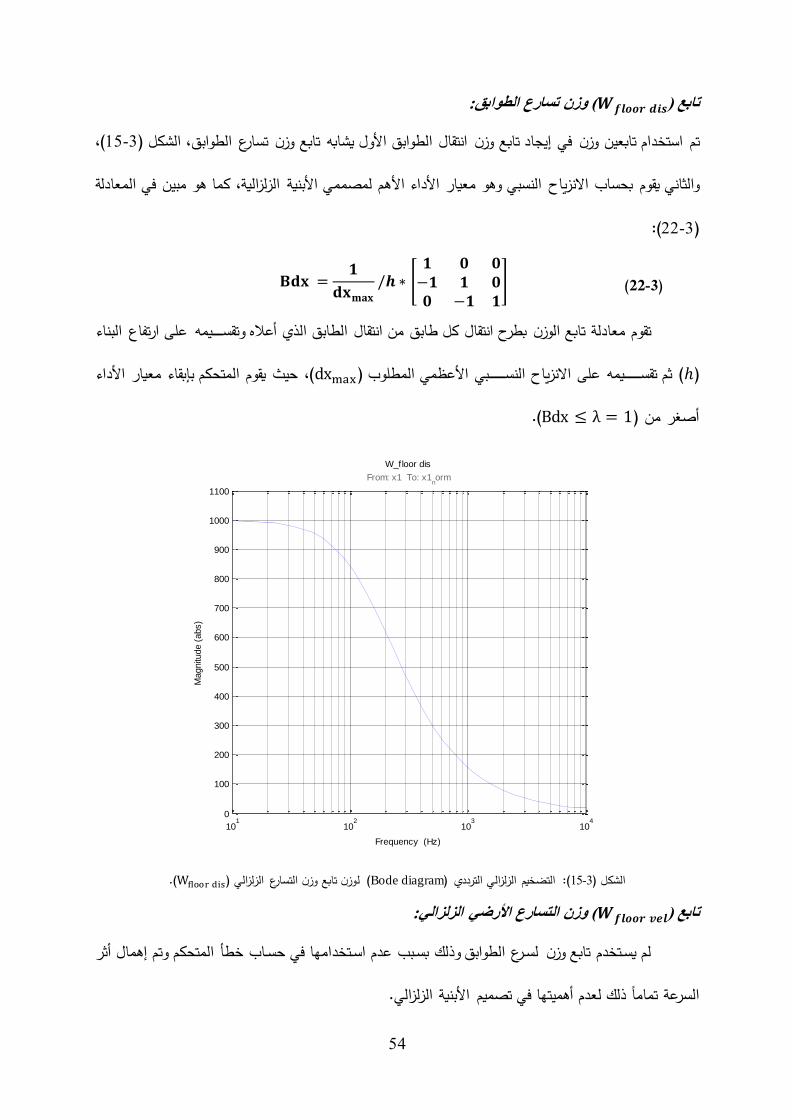
54
( وزن تسارع الطوابق:𝑾𝒇𝒍𝒐𝒐𝒓 𝒅𝒊𝒔تابع )
،(15-3الشكل ) ،استخدام تابعين وزن في إيجاد تابع وزن انتقال الطوابق األول يشابه تابع وزن تسارع الطوابق تم
معادلةال يكما هو مبين ف ي األبنية الزلزالية،صمموهو معيار األداء األهم لم النسبي زيايوالثاني يقوم بحساب االن
(3-22):
(3-22) 𝐁𝐝𝐱 =𝟏
𝐝𝐱𝐦𝐚𝐱/𝒉 ∗ [
𝟏 𝟎 𝟎−𝟏 𝟏 𝟎𝟎 −𝟏 𝟏
]
فاع البناء ارتتقوم معادلة تابع الوزن بطري انتقال كل طابق من انتقال الطابق الذي أعاله وتقس يمه على
(ℎ( ثم تقس يمه على االنزياي النس بي األعظمي المطلوب )dxmax حيث يقوم المتحكم بإبقاء معيار األداء ،)
Bdxأصغر من ) ≤ λ = 1.)
.(Wfloor disالزلزالي )( لوزن تابع وزن التسارع Bode diagramالتضخيم الزلزالي الترددي )(: 15-3الشكل )
( وزن التسارع األرضي الزلزالي:𝑾𝒇𝒍𝒐𝒐𝒓 𝒗𝒆𝒍تابع )
همال أثر إ لم يس تخدم تابع وزن لس رع الطوابق وذلك بس بب عدم اس تخدامها في حس اب خطأ المتحكم وتم
.الزلزالي ذلك لعدم أهميتها في تصميم األبنيةتمامًا السرعة
101
102
103
104
0
100
200
300
400
500
600
700
800
900
1000
1100
From: x1 To: x1norm
Magnitu
de (
abs)
W_floor dis
Frequency (Hz)

55
:(Clipped optimal)إضافة متحكم .6ـ4ـ3
القوة المطلوبة من المخمدات لكن بس بب ص عوبة معادالت ة جميعها( الس ابقK) اتعطي المتحكمت
ديد جالمخمد الهيدروليكي المغناطيس ي ال يمكن تحويل القوة المطلوبة إلش ارة كهربائية، لذلك نحن بحاجه لمتحكم
.للتحكم بالمخمداتوذلك ( A 2.5~0)في المجال (vأوامر كهربائية )و ( إلى إشارة Fdيترجم القوة المطلوبة )
( Fdبمقارنه القوة المطلوبة )الذي يقوم ( Clipped optimal( طريقه عمل متحكم )16-3الش كل )يبين
( ويقوم بتش غيل او إطفاء المخمد للحص ول sec 1/1024( في أجزاء الثانية )Fmrد )مع القوة المتولدة في المخم
(Dyke 1996) على القوة المطلوبة.
(Dyke et al. 1996a) .(Clipped optimalمتحكم )( : 16-3الشكل )
حيث (،17-3الشكل )( كما هو موضح في Matlab Simulinkتم جمع األجزاء جميعها في ماتالب )ي
المتحكم ضجيج عشوائي لكل من حساسات التسارع وحساسات القوى في المخمدات، كذلك استخدم ضيفا
(controller infHالذي يعطي قيمة ) و ، القوة المطلوبة من المخمد( متحكمClipped optimal controller )
:بمقارنة القوة في المخمدات مع القوى المطلوبة واجعطاء األمر الكهربائي بناًء على ذلكيقوم الذي
(Matlab Simulink: بنية المتحكم في برنامج )(17-3الشكل )

الفصل الرابع
SAP2000و MATLABالدراسة التحليلية باستخدام
The analytical study using MATLAB and SAP2000
57
الفصل الرابع
SAP2000و MATLABباستخدام الدراسة التحليلية
مقدمة: .1ـ4
تح ت ت اثير ع دة ط ابق( 20، 9، 3ب ارتف اع ات مختلف ة ) مب اني مع دني ة ثالث تحلي لفي ه ذا الفص ل تم
ألجل مش روع (Brandow & Johnston) ش ركةمص ممة من قبل ، وهي أبنيةارض ية بش دات مختلفةهزات
(SAC Phase IIالبحثي ) (SAC 1996) بتص ميم الوص الت في اإلطارات المعدنية المقاومة للعزمالذي يهتم ، و
(Venture et al. 2000) ، ش رو الكوداتلتلبية جميع مص ممة منفذة إاّل أنهاوبالرغم ان هذه المباني غير
دراس ات س ي لقيا مرجعبمثابة اليفورنيا. وقد تم اختيار هذه المباني ألنها أيض افي كلمنطقة لوس انجليس
(SAC)، مقارنة النتائج. ل وسعأتوفر أساسا فهي وبالتالي
التالية:هي مشروع مشترك للمنظمات ( SAC)حيث أن
(.SEAOC) في والية كاليفورنيااإلنشائيين نقابة المهندسين
(.ATC)مجلس التكنولوجيا التطبيقية
(.CUREE) يةالزلزالهندسة ال كاليفورنيا لألبحاث في مجال اتجامع
نماذج األبنية المستخدمة: .2ـ4
(:Story Benchmark Building-3طوابق ) 3بناء معدني من .1ـ2ـ4
جملة ،(m 11.89( وارتفاع البناء الكلي )m 3.96طوابق ارتفاع كل منها ) 3يتكون البناء المعدني من
( تق اوم األحم ال الج انبي ة وجمل ة إط ارات ع ادي ة MRFمحيطي ة مق اوم ة للعزم ) تأربع ة إط ارامن مكون ة البن اء
( المكون m ×54.87 m 36.58أبعاد المس قط االفقي )( 1-4الش كل ) حمال الش اقولية. يوض حتقاوم األداخلية
(.m 9.15ا متساوية البعد )هوب وستة فتحات في االتجاه شر غرب جميعمن أربع فتحات في االتجاه شمال جن
وهي موثوقة في األس اس على (،H( على ش كل حرف )fy=345 MPaذ )فوالمن عمدة تص نع األ
مستوي القاعدة وتستمر على كامل البناء.
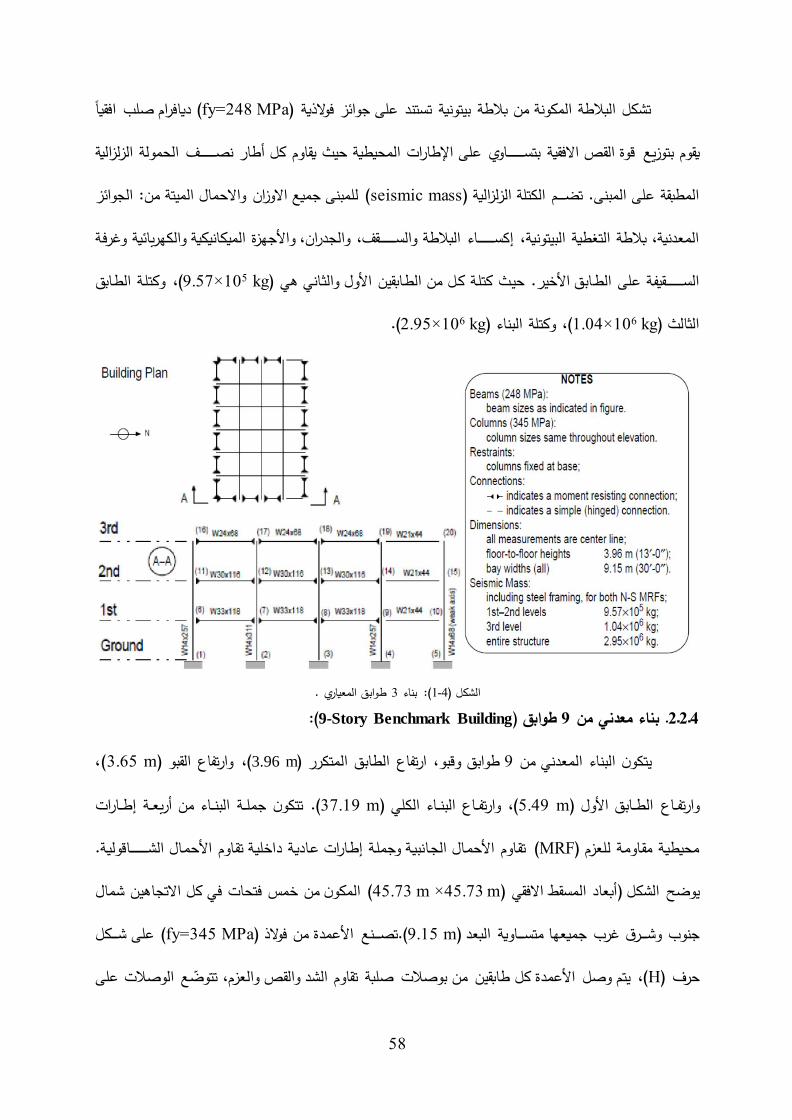
58
( ديافرام صلب افقيًا fy=248 MPaتشكل البالطة المكونة من بالطة بيتونية تستند على جوائز فوالذية )
ية كل أطار نص ف الحمولة الزلزال قوة القص االفقية بتس اوي على اإلطارات المحيطية حيث يقاوم يقوم بتوزيع
( للمبنى جميع االوزان واالحمال الميتة من: الجوائز seismic massتض م الكتلة الزلزالية ) المطبقة على المبنى.
غرفة األجهزة الميكانيكية والكهربائية و و جدران، وال، إكس اء البالطة والس قف، ةالمعدنية، بالطة التغطية البيتوني
وكتل ة الط ابق ، (kg 510×9.57والث اني هي ) ابق األخير. حي ث كتل ة ك ل من الط ابقين األولالس قيف ة على الط
(.kg 610×2.95، وكتلة البناء )(kg 610×1.04الثالث )
.طوابق المعياري 3(: بناء 1-4الشكل )
(:Story Benchmark Building-9طوابق ) 9بناء معدني من .2ـ2ـ4
(، m 3.65(، وارتفاع القبو )m 3.96المتكرر )الطابق طوابق وقبو، ارتفاع 9يتكون البناء المعدني من
ت(. تتكون جمل ة البن اء من أربع ة إط اراm 37.19(، وارتف اع البن اء الكلي )m 5.49وارتف اع الط ابق األول )
حم ال الش اقولي ة. تق اوم األنبي ة وجمل ة إط ارات ع ادي ة داخلي ة ( تق اوم األحم ال الج اMRFمحيطي ة مق اوم ة للعزم )
( المكون من خمس فتحات في كل االتجاهين شمال m ×45.73 m 45.73أبعاد المسقط االفقي )الشكل )يوضح
( على ش كل fy=345 MPaتص نع األعمدة من فوالذ )(.m 9.15جنوب وش ر غرب جميعها متس اوية البعد )
على تتوّضع الوصالتتقاوم الشد والقص والعزم، صلبة بوصالتمن (، يتم وصل األعمدة كل طابقين Hحرف )
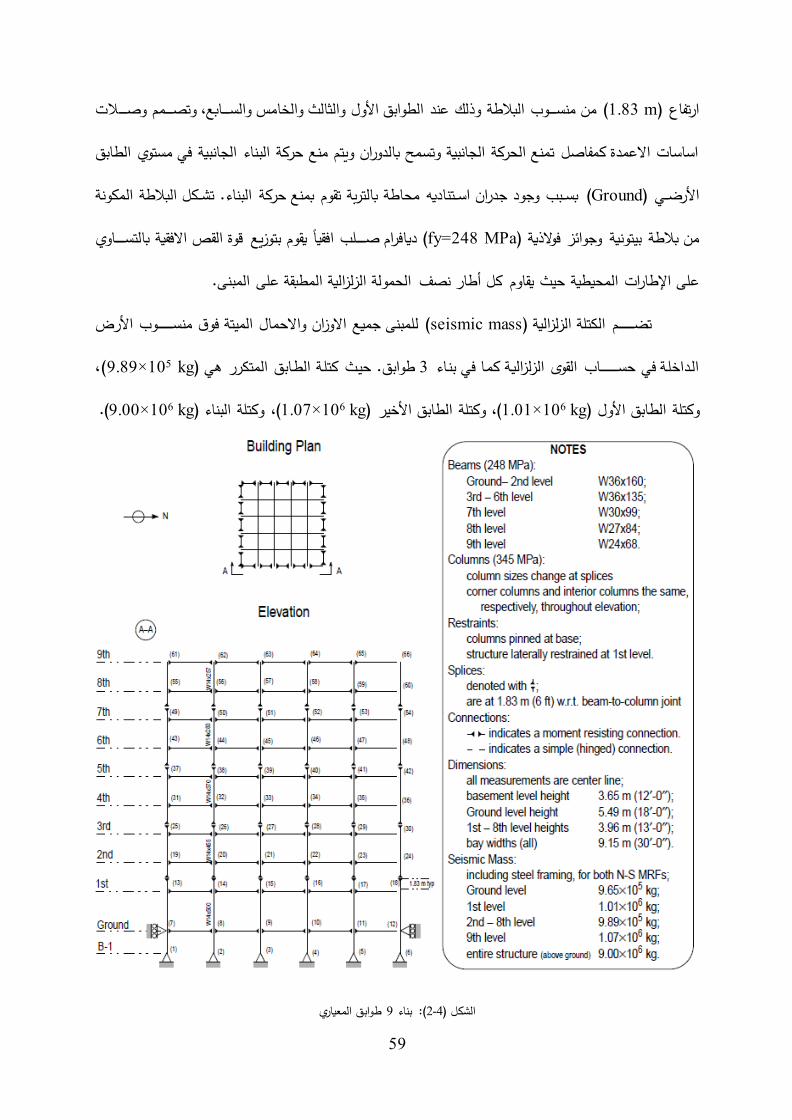
59
وص الت متص م، و الثالث والخامس والس ابعاألول و الطوابقوذلك عند ( من منس وب البالطةm 1.83ارتفاع )
الطابق ي ناء الجانبية في مستو اساسات االعمدة كمفاصل تمنع الحركة الجانبية وتسمح بالدوران ويتم منع حركة الب
مكونة تش كل البالطة ال بس بب وجود جدران اس تناديه محاطة بالتربة تقوم بمنع حركة البناء. (Groundي )األرض
تس اوي اليقوم بتوزيع قوة القص االفقية ب ص لب افقياً ديافرام( fy=248 MPaمن بالطة بيتونية وجوائز فوالذية )
كل أطار نصف الحمولة الزلزالية المطبقة على المبنى.يقاوم على اإلطارات المحيطية حيث
فو منس وب األرض( للمبنى جميع االوزان واالحمال الميتة seismic massتض م الكتلة الزلزالية )
، (kg 510×9.89الط ابق المتكرر هي ). حي ث كتل ة طوابق 3ال داخل ة في حس اب القوى الزلزالي ة كم ا في بن اء
(.kg 610×9.00) وكتلة البناء(، kg 610×1.07وكتلة الطابق األخير ) (،kg 610×1.01) لألو وكتلة الطابق ا
طوابق المعياري 9(: بناء 2-4الشكل )

60
(:Story Benchmark Building-20طابق ) 20بناء معدني من .3ـ2ـ4
ف اع القب و (، وارتm 3.96وقب وين، ارتف اع المتك رر منه ا )ط ابق 20يتك ون البن اء المع دني م ن
(5.49 mوارتف اع الط ابق األرض ي ،) (3.96 m( وارتف اع البن اء الكل ي ،)80.77 m تتك ون جمل ة .)
( تق اوم األحم ال الجانبي ة وجمل ة إط ارات عادي ة MRFمحيطي ة مقاوم ة للع زم ) تالبن اء م ن أربع ة إط ارا
أبع اد المس قط االفق ي ( 3-4الش كل )ية. يوض ح تق اوم االحم ال الش اقولداخلي ة
(30.48 m × 36.58 mالمك ون م ن خ ) س تة فتح ات ف ي م س فتح ات ف ي االتج اه ش مال جن وب و
(.m 6.10االتجاه شر غرب جميعها متساوية البعد )
من طوابق 3األعمدة كل يتم وص ل (، H)( على ش كل حرف fy=345 MPaتص نع االعمدة من فوالذ )
ع الوص الت على ارتفاع )، و تقاوم الش د والقص والعزم خالل وص لة ص لبة ( من منس وب البالطة m 1.83تتوض ّ
.األو والرابت والسابت والعاشر والثالث عشر والسادس عشر والثامن عشروذلك في الطوابق
وص الت اس اس ات االعمدة كمفاص ل تمنع الحركة الجانبية وتس مح بالدوران ويتم منع حركة البناء متص م
بس بب وجود جدران اس تناديه محاطة بالتربة تقوم بمنع حركة (Groundي )األرض الطابق الجانبية في مس توي
ص لب افقياً ديافرام( fy=248 MPaالبناء. تش كل البالطة المختلطة المكونة من بالطة بيتونية وجوائز فوالذية )
لزالية يقاوم نص ف الحمولة الز إطارحيث كل ،تس اوي على اإلطارات المحيطيةاليقوم بتوزيع قوة القص االفقية ب
المطبقة على المبنى.
( للمبن ى جمي ع االوزان واالحم ال الميت ة seismic massتض م الكتل ة الزلزالي ة )
طواب ق. حي ث كتل ة 3الق وى الزلزالي ة كم ا ف ي بن اء ف و منس وب األرض الداخل ة ف ي حس اب
(، وكتل ة × kg 5105.63(، وكتل ة الط ابق األول )kg 510× 5.52الط ابق المتك رر ه ي )
(.× kg 7101.11(، وكتلة البناء ) kg 510×5.84الطابق األخير )
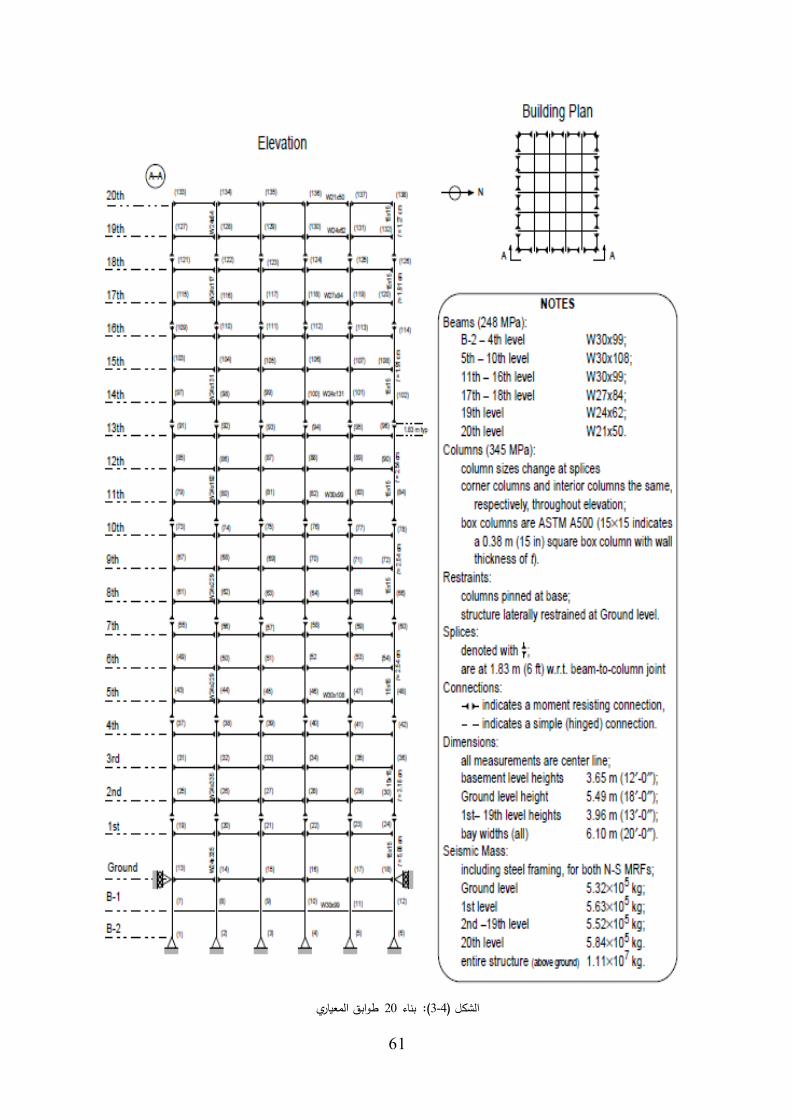
61
طوابق المعياري 20(: بناء 3-4الشكل )
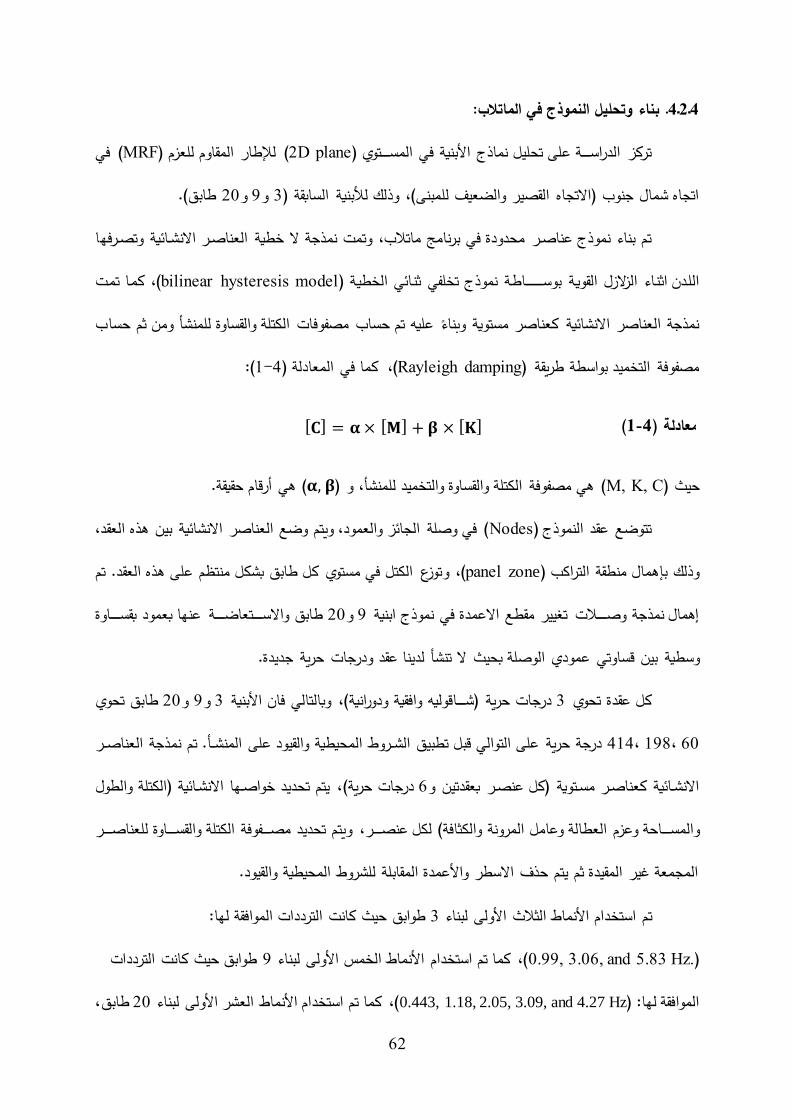
62
:في الماتالبنموذج بناء وتحليل ال .4ـ2ـ4
( في MRFالمقاوم للعزم ) لإلطار( 2D planeاألبنية في المس توي )نماذ تركز الدراس ة على تحليل
(. طابق 20و 9و 3السابقة ) لألبنيةوذلك (، اتجاه شمال جنوب )االتجاه القصير والضعيف للمبنى
خطية العناص ر االنش ائية وتص رفها نمذجة الوتمت ، رنامج ماتالبتم بناء نموذ عناص ر محدودة في ب
تكم ا تم (، bilinear hysteresis modelبوس اط ة نموذ تخلفي ثن ائي الخطي ة )القوي ة الزالزلالل دن اثن اء
نمذجة العناصر االنشائية كعناصر مستوية وبناًء عليه تم حساب مصفوفات الكتلة والقساوة للمنشأ ومن ثم حساب
:(1-4) المعادلةكما في (، Rayleigh dampingمصفوفة التخميد بواسطة طريقة )
[𝐂] (1-4) عادلةم = 𝛂× [𝐌] + 𝛃 × [𝐊]
,𝛂و )، ( هي مصفوفة الكتلة والقساوة والتخميد للمنشأM, K, C) حيث 𝛃 أرقام حقيقة.( هي
( في وصلة الجائز والعمود، ويتم وضع العناصر االنشائية بين هذه العقد، Nodesتتوضع عقد النموذ )
توزع الكتل في مستوي كل طابق بشكل منتظم على هذه العقد. تم ، و (panel zoneوذلك بإهمال منطقة التراكب )
قس اوةبطابق واالس تعاض ة عنها بعمود 20و 9إهمال نمذجة وص الت تغيير مقطع االعمدة في نموذ ابنية
عمودي الوصلة بحيث ال تنشأ لدينا عقد ودرجات حرية جديدة.بين قساوتي وسطية
طابق تحوي 20و 9و 3بنية األن (، وبالتالي فاوافقية ودورانيةدرجات حرية )ش اقوليه 3كل عقدة تحوي
ناص ر تم نمذجة الع درجة حرية على التوالي قبل تطبيق الش رو المحيطية والقيود على المنش أ. 414، 198، 60
، يتم تحديد خواص ها االنش ائية )الكتلة والطول (درجات حرية 6كل عنص ر بعقدتين واالنش ائية كعناص ر مس توية )
يتم تحديد مص فوفة الكتلة والقس اوة للعناص ر ، و المس احة وعزم العطالة وعامل المرونة والكثافة( لكل عنص رو
المجمعة غير المقيدة ثم يتم حذف االسطر واألعمدة المقابلة للشرو المحيطية والقيود.
طوابق حيث كانت الترددات الموافقة لها: 3تم استخدام األنما الثالث األولى لبناء
(0.99, 3.06, and 5.83 Hz. كما تم استخدام األنما الخمس األولى لبناء ،)طوابق حيث كانت الترددات 9
طابق، 20(، كما تم استخدام األنما العشر األولى لبناء and 4.27 Hz ,3.09 ,2.05 ,1.18 ,0.443الموافقة لها: )

63
بفرض أن (..and 3.68 Hz ,… ,2.44 ,2.40 ,1.83 ,1.30 ,0.753 ,0.261حيث كانت الترددات الموافقة لها: )
لطابق التس ارع لنتقال و اس تجابة االيعطي الذي ( Transfer Functionالبناء خطي يمكن إيجاد تابع تحويل )
ش كل الوذلك على مجال تغير الترددات، كما هو موض ح في الش كل، ويوض ح ،األخير من خالل التس ارع األرض ي
اشكال أنما االهتزاز الثالث األولى لألبنية المدروسة.( 4-4)
.)الخط المتقطع( وتسارع الطابق األخير )الخط المستمر( لالبنية المعياريةالزلزالي النتقال النسب الطيفية للتضخيم (: 4-4الشكل )
10-1
100
101
10-4
10-2
100
Magnit
ude (
abs)
3_ Strory Building Model
Frequency (Hz)
10-1
100
101
10-4
10-2
100
Magnit
ude (
abs)
9_ Story Building Model
Frequency (Hz)
10-1
100
101
10-4
10-2
100
Magnit
ude (
abs)
20_ Story Building Model
Frequency (Hz)
Displacement
Acceleration
Displacement
Acceleration
Displacement
Acceleration
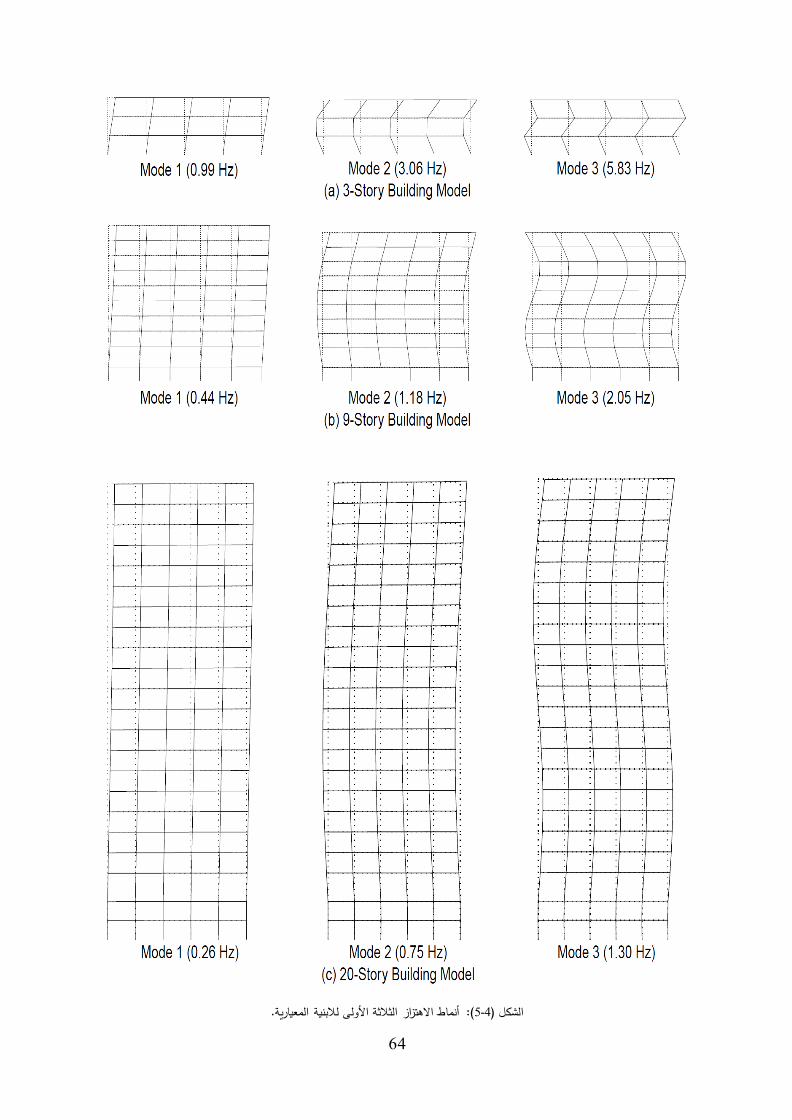
64
.(: أنما االهتزاز الثالثة األولى لالبنية المعيارية5-4الشكل )
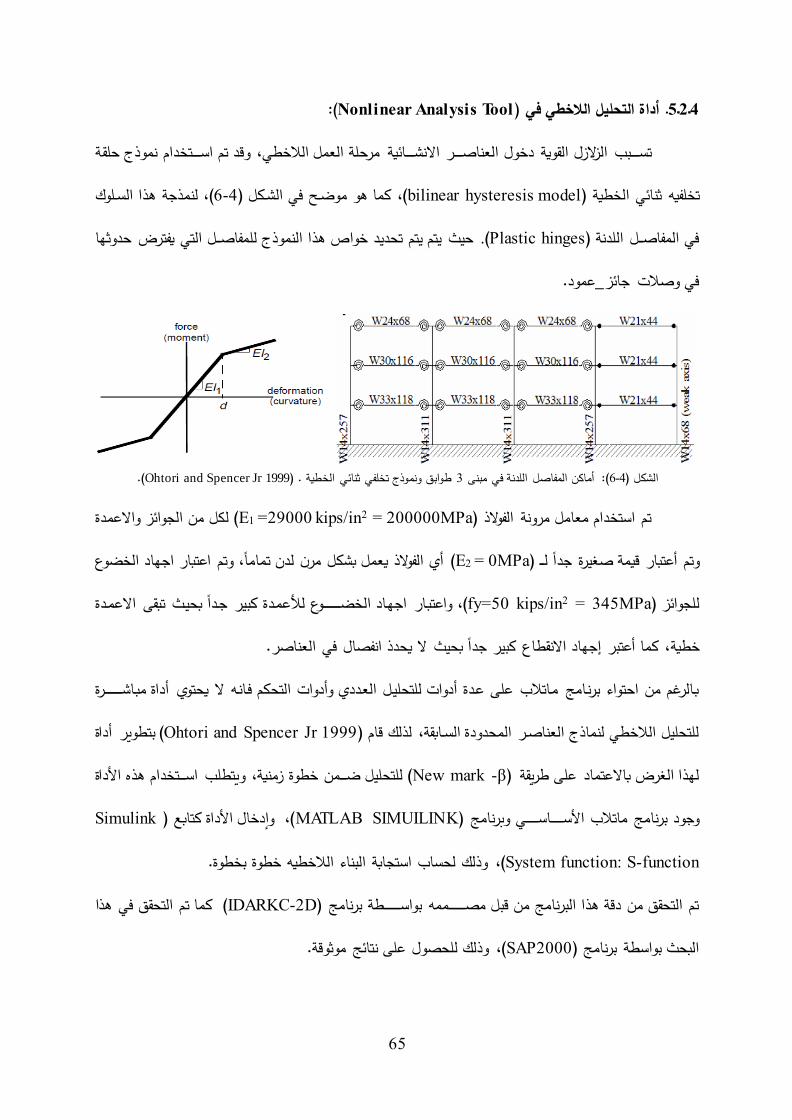
65
(:Nonlinear Analysis Toolخطي في )أداة التحليل الال .5ـ2ـ4
قة حل تم اس تخدام نموذ وقد، نش ائية مرحلة العمل الالخطيالعناص ر االول القوية دختس بب الزالزل
الس لوك ، لنمذجة هذا (6-4الش كل ) (، كما هو موض ح فيbilinear hysteresis modelثنائي الخطية ) تخلفيه
ها يفترض حدوثحيث يتم يتم تحديد خواص هذا النموذ للمفاص ل التي .(Plastic hingesفي المفاص ل اللدنة )
.في وصالت جائز_عمود
.(Ohtori and Spencer Jr 1999) .نموذ تخلفي ثنائي الخطية طوابق و 3أماكن المفاصل اللدنة في مبنى : (6-4الشكل )
( لكل من الجوائز واالعمدة 00MPa2000= 2=29000 kips/in 1Eتم استخدام معامل مرونة الفوالذ )
اعتبار اجهاد الخضوع تم ( أي الفوالذ يعمل بشكل مرن لدن تمامًا، و 0MPa2 E =وتم أعتبار قيمة صغيرة جدًا ل )
بحي ث تبقى االعم دة كبير ج داً خض وع لألعم دة الاجه اد اعتب ار و ،(=345MPa 2kips/in 50fy =للجوائز )
.، كما أعتبر إجهاد االنقطاع كبير جدًا بحيث ال يحدذ انفصال في العناصرخطية
رة أداة مب اش يكم ف ان ه ال يحتو ب الرغم من احتواء برن امج م اتالب على ع دة أدوات للتحلي ل الع ددي وأدوات التح
بتطوير أداة (Ohtori and Spencer Jr 1999)قام الس ابقة، لذلكللتحليل الالخطي لنماذ العناص ر المحدودة
يتطلب اس تخدام هذه األداة ، و ( للتحليل ض من خطوة زمنيةNew mark -βلهذا الغرض باالعتماد على طريقة )
دخال األداة كتابع ) ،(MATLAB SIMUILINKوجود برنامج ماتالب األس اس ي وبرنامج ) Simulinkواج
System function: S-function) ، خطوة بخطوة. الالخطيهوذلك لحساب استجابة البناء
هذا ( كما تم التحقق فيIDARKC-2Dتم التحقق من دقة هذا البرنامج من قبل مص ممه بواس طة برنامج )
موثوقة.(، وذلك للحصول على نتائج SAP2000البحث بواسطة برنامج )

66
(Somerville and Venture 1997)السجالت الزلزالية المستخدمة في التحليل: .3ـ4
رئيس ية هي:الس جالت األربعة ال، و وس تة مش تقة منها لتقيّيم أداء المتحكم ،رئيس يةزلزالية تتم اس تخدام أربعة س جال (، هي:two far-field and two near-fieldعنه ) انموقع الزلزال وسجالن بعيد يبان منسجالن زمنّيان قر
a. س جل زلزال( الس نتروEl Centroمركبة س جل الس نترو ش مال جنوب المس جلة في مركز :)
(Imperial Valley Irrigation District substationفي كاليفورني )ا ( 18بتاريخ May 1940.) b. ينوه-هاش يس جل زلزال (Hachinoheمركبة س جل هاش ي :)-ش مال جنوب المس جلة في ينوه
(Hachinohe City during the Toka-chi-oki earthquake( في اليابان بتاريخ )16 May 1968.) c. رد-نورثس جل زلزال (Northridge مركبة س جل :)ش مال جنوب المس جلة في رد-نورث(Sylmar
County Hospital parking lotا( في كاليفورني ( 17بتاريخJan,1994.) d. س ج ل زل زال( ك وب يKobe م رك ب ة س ج ل ك وب ي ش م ال ج ن وب ال مس ج ل ة ف ي :)
(Japanese Meteorological Agency (JMA) station during the Hyogo-ken Nanbu في ) (.17Jan,1995اليابان بتاريخ )
( and 8.1782 m/sec ,8.2676 ,2.250 ,23.417)السجالت األربعة ذات التسارع االعظمي: (7-4الشكل )يوضح هي: (.8-4الشكل )، عدة مستويات من هذه الزالزل تم اشتقا كذلك ، و على التوالي
(0.5, 1.0 and 1.5 times the magnitude of El Centro and Hachinohe). (0.5 and 1.0 times the magnitude of Northridge and Kobe.)
(: السجالت الزالية الرئيسية المستخدمة في التحليل7-4الشكل )
لتسارعات هذه الزالزل: (PGA) ةيظمعوالقيمة األخصائص االنحراف المعياري ( 8-4الشكل )يوضح
0 10 20 30 40 50 60-4
-2
0
2
4
Time (sec)
Acc
(m
/sec
2)
PGA=3.4
0 10 20 30 40-2
0
2
4
Time (sec)
Acc
(m
/sec
2)
PGA=2.25
PGA=8.18
0 5 10 15 20 25 30-10
-5
0
5
10
Time (sec)
Acc
(m
/sec
2)
PGA=8.27
0 5 10 15 20 25 30-10
-5
0
5
10
Time (sec)
Acc
(m
/sec
2)
PGA=8.18
KOBE
El_centro HACHINHE
Northridg
PGA=2.25

67
السجالت الزلزالية المستخدمة بالتحليل: خواص (8-4الشكل )
وهو(، σ)( ويرمز له Stander deviation: std)تعريف االنحراف المعياري ( 9-4الش كل )يوض ح داد امتعلى مدى يدل و لقياس مدى التبعثر اإلحص ائي، ةاإلحص ائير اس تخداما من بين مقاييس القيمة األكث
مجاالت القيم ضمن مجموعة البيانات اإلحصائية.
تتجمع حولها قيم مجموعة ويمكن من خاللها الحكم على بقية ( μ)المتوس ط الحس ابي )المعدل(: هو قيمة
قيم المجموعة، فتكون هذه القيمة هي الوسط الحسابي.
(Stander deviationاالنحراف المعياري ): )9-4الشكل )
0.5 El
Centro
1.0 El
Centro
1.5 El
Centro
0.5
Hachino
he
1.0
Hachino
he
1.5
Hachino
he
0.5
NORTH
RDG
1.0
NORTH
RDG
0.5
KOBE
1.0
KOBE
std acc 0.24 0.48 0.71 0.20 0.40 0.59 0.36 0.72 0.30 0.59
peak acc 1.71 3.42 5.13 1.13 2.25 3.38 4.13 8.27 4.09 8.18
Median acc 0.00 0.00 -0.01 -0.02 -0.04 -0.05 0.00 0.00 0.00 0.00
-1.00
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
M/S
EC
^2
السجالت الزلزالية المستخدمة بالتحليل
خواص السجالت الزلزالية الداخلة في التحليل
std acc peak acc Median acc
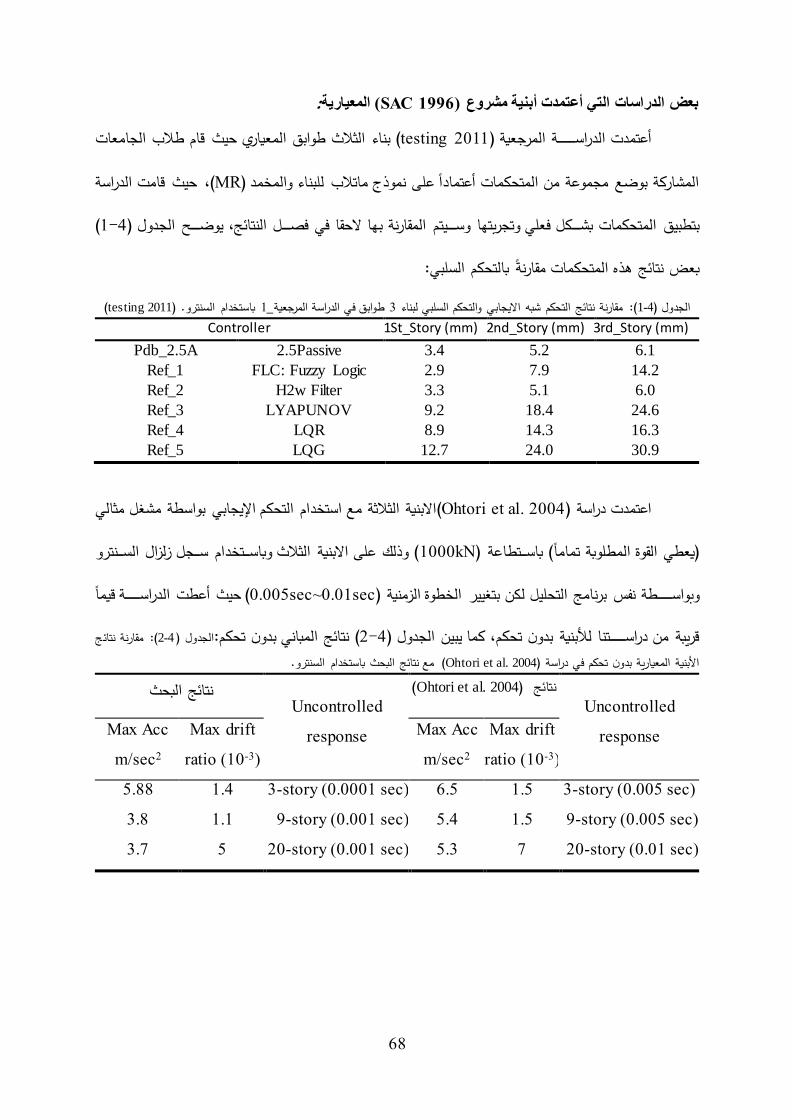
68
:المعيارية (SAC 1996)بعض الدراسات التي أعتمدت أبنية مشروع
بناء الثالث طوابق المعياري حيث قام طالب الجامعات (testing 2011) الدراس ة المرجعية أعتمدت
، حيث قامت الدراسة (MR) المشاركة بوضع مجموعة من المتحكمات أعتماداً على نموذ ماتالب للبناء والمخمد
(1-4) بش كل فعلي وتجربتها وس يتم المقارنة بها الحقا في فص ل النتائج، يوض ح الجدولبتطبيق المتحكمات
بعض نتائج هذه المتحكمات مقارنًة بالتحكم السلبي:
(testing 2011) باستخدام السنترو. 1الدراسة المرجعية_ طوابق في 3لبناء السلبي شبه االيجابي والتحكم مقارنة نتائج التحكم (: 1-4الجدول )Controller 1St_Story (mm) 2nd_Story (mm) 3rd_Story (mm)
Pdb_2.5A 2.5Passive 3.4 5.2 6.1
Ref_1 FLC: Fuzzy Logic 2.9 7.9 14.2
Ref_2 H2w Filter 3.3 5.1 6.0
Ref_3 LYAPUNOV 9.2 18.4 24.6
Ref_4 LQR 8.9 14.3 16.3
Ref_5 LQG 12.7 24.0 30.9
ي مشغل مثالالتحكم اإليجابي بواسطة االبنية الثالثة مع استخدام (Ohtori et al. 2004)راسة اعتمدت د
( وذلك على االبنية الثالث وباس تخدام س جل زلزال الس نترو 1000kN( باس تطاعة )يعطي القوة المطلوبة تماماً )
الدراس ة قيمًا ( حيث أعطت0.005sec~0.01sec) بتغيير الخطوة الزمنيةلكن وبواس طة نفس برنامج التحليل
مقارنة نتائج (: 2-4الجدول ):نتائج المباني بدون تحكم (2-4) جدول، كما يبين اللألبنية بدون تحكم قريبة من دراس تنا باستخدام السنترو. مع نتائج البحث (Ohtori et al. 2004)األبنية المعيارية بدون تحكم في دراسة
Uncontrolled
response
(Ohtori et al. 2004) نتائج Uncontrolled
response
نتائج البحث
Max drift
)3-10( ratio
Max Acc
2m/sec Max drift
)3-(10 ratio
Max Acc
2m/sec 3-story (0.005 sec) 1.5 6.5 3-story (0.0001 sec) 1.4 5.88 9-story (0.005 sec) 1.5 5.4 9-story (0.001 sec) 1.1 3.8 20-story (0.01 sec) 7 5.3 20-story (0.001 sec) 5 3.7

69
(:SAP2000و) (MATLAB)البرنامج المطور بواسطة .4ـ4
يالالخطيقوم بإدخال النموذ )كما هو موض ح في الملحقات( الماتالب واس طةتطوير برنامج بتم
دخال القوة المتولدة في المخمد خطوة بخطوة كس جل زمني SAP2000لإلطار على برنامج ) للقوى في أماكن ( واج
. يهدف البرنامج الى ما يلي:(10-4الشكل ) ،زلزالي األرضيموازي لسجل التسارع ال( MRتوضع مخمدات )
التحقق من عمل أداة التحليلي الالخطي لإلطار بواسطة ماتالب. .1
البس يطة التي يمكن نمذجتها على أمكانية العمل على منش آت أكثر تعقيدا من المنش آت االطارية التأكد من .2
أداة التحليلي الالخطي لإلطار بواسطة ماتالب.
ماتالب للتحكم ونموذ المخمد في ماتالب.( على التوازي مع برنامج SAP2000برنامج ) محاولة ربط .3
.نموذ الساب والماتالب المطور :)10-4الشكل )
(:SAP2000)والدراسة المرجعية النموذج بالمقارنة مع تحقيق .5ـ4
طوابق الث ثمقارنة نتائج التحليل للمبنى تتم ةلتحقق من ملف الماتالب المس تخدم في الدراس ة التحليليل
بين ( ث اب ت طول الوق تA 2.5( بتي ار كهرب ائي أعظمي )MRالتحكم الس لبي حي ث تعم ل مخم دات )ب المزود
وفي جميع الطوابق. ،( مع الدراسة المرجعيةMatlab &SAP2000)ونموذ نموذ ماتالب
نموذ التحليلي باس تخدام ونتائج 1الدراس ة المرجعية_االنتقال للطوابق في نتائج ، (3-4الجدول )يوض ح
(Matlab &Spencer ) مبسط ونتائج برنامج(Matlab &SAP2000).
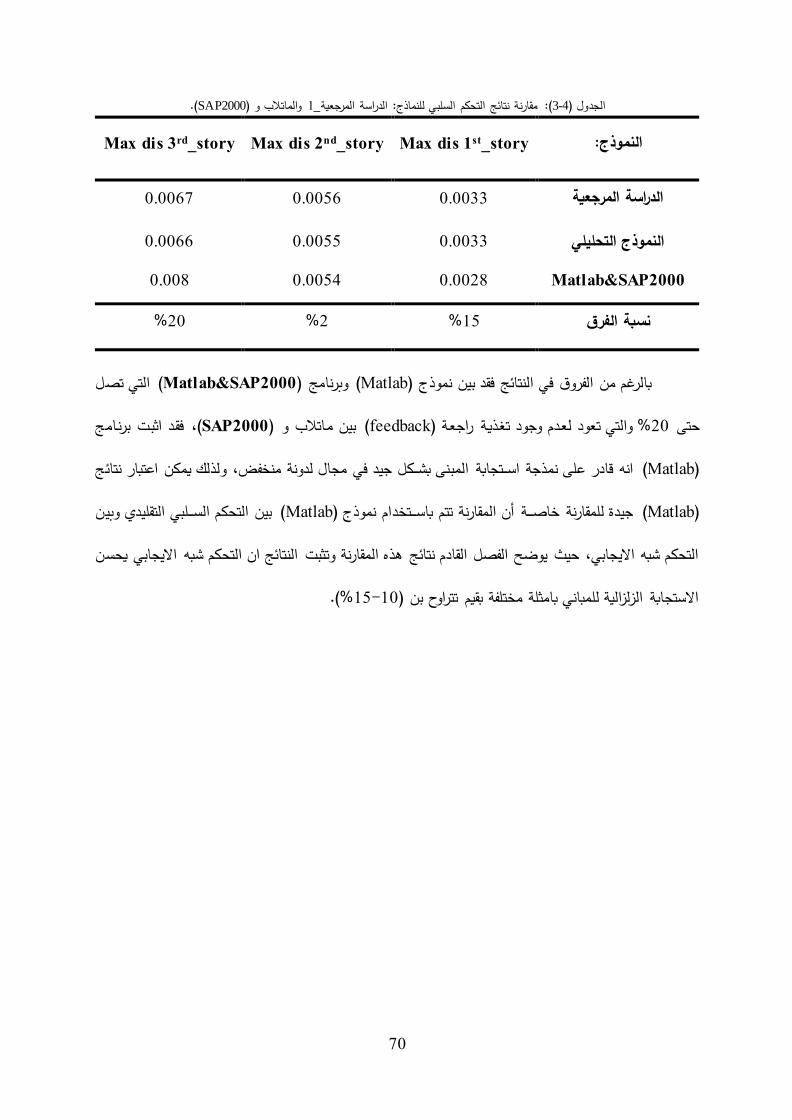
70
(.SAP2000والماتالب و ) 1مقارنة نتائج التحكم السلبي للنماذ : الدراسة المرجعية_(: 3-4الجدول )
storystMax dis 1 _storyndMax dis 2 _storyrdMax dis 3_ النموذج:
0.0067 0.0056 0.0033 الدراسة المرجعية
0.0066 0.0055 0.0033 النموذج التحليلي
Matlab&SAP2000 0.0028 0.0054 0.008
%20 %2 %15 نسبة الفرق
التي تصل (Matlab&SAP2000)وبرنامج ( Matlabبالرغم من الفرو في النتائج فقد بين نموذ )
، فق د اثب ت برن امج (SAP2000( بين م اتالب و )feedbackوالتي تعود لع دم وجود تغ ذي ة راجع ة ) %20حتى
(Matlab) ائجلذلك يمكن اعتبار نتو نى بش كل جيد في مجال لدونة منخفض، المباس تجابة انه قادر على نمذجة
(Matlab )( جيدة للمقارنة خاص ة أن المقارنة تتم باس تخدام نموذMatlab بين التحكم الس لبي التقليدي وبين )
ه االيجابي يحسن ان التحكم شبالنتائج التحكم شبه االيجابي، حيث يوضح الفصل القادم نتائج هذه المقارنة وتثبت
(.%15-10االستجابة الزلزالية للمباني بامثلة مختلفة بقيم تتراوي بن )
71
الفصل الخامس
النتائجمناقشة
Results Discussion

72
الفصل الخامس
جئالنتامناقشة
Results Discussion
مقدمة: .1ـ5
أبنية الدراس ة كل من ( لnonlinearخطي )الالالتحليل نتائجومناقش ة تم في هذا الفص ل اس تعراض
(3&9&20-story benchmark buildings وذلك ،):على ثالث مراحل لكل بناء
.(Uncontrolled damped building: Udbبدون مخمدات )المبنى (.آ )
حيث معمل المخمدات ( Passively damped building: Pdb) سدددددددلبي مةليد بمتحكم المبنى مزود ب(.)
(.Constant current 2.5Aثابت )اقصى طوا الوقت بيمر كهربائي
الموض ح في الفص ل الثالث، (Controlled damped building: Cdb)خطي بمتحكم المبنى مزود ج(.)
(.A 2.5~0) متغير يي المجا حيث معمل المخمدات طوا الوقت بيمر كهربائي
ن خالل ، وذلك مالموض حة في الفص ل الرابع على الس جالت الزلزالية العش رة األداءالتحليل وتقيّيم تم
( 5600kNقوة )( في كل طابق لت من 200kN MR Damperمخمد ) 28حيث تم اس تخدام ،برنامج ماتالب
ي الدراس ة فوهي نص ف القوة الالزمة إلبقاء المبنى في الحالة المرنة حيث تم اس تخدام هذا العدد الكبير نس بيًا كما
للمقارنة بها. مقبولة حيث يبقى زمن التحليل مقبواَل ويمنحنا قيماً 1المرجعية_
طوابق: 3نتائج بناء .2ـ5
( بدون مخمدات مع مبنى مزود بالتحكم السلبي:story-3مبنى )نتائج المقارنة .1ـ2ـ5
ثالث طوابق حيث كل طابق يحوي مخمد المبنى ( توزيع المخمدات على طوابق 2-5)الش كل يوض ح
(، حيث نالحظ أن حس اس ات التس ارع وحس اس ات 200kN MR Damperمخمد ) 28باس تطاعة تعادل اس تطاعة
( للمتحكم الذي يقوم بأعطاء اوامر التحكم بالمخمدات Feedbackعة )القوة المتولدة في المخمد تعطي أش ارة راج
الموزعة.
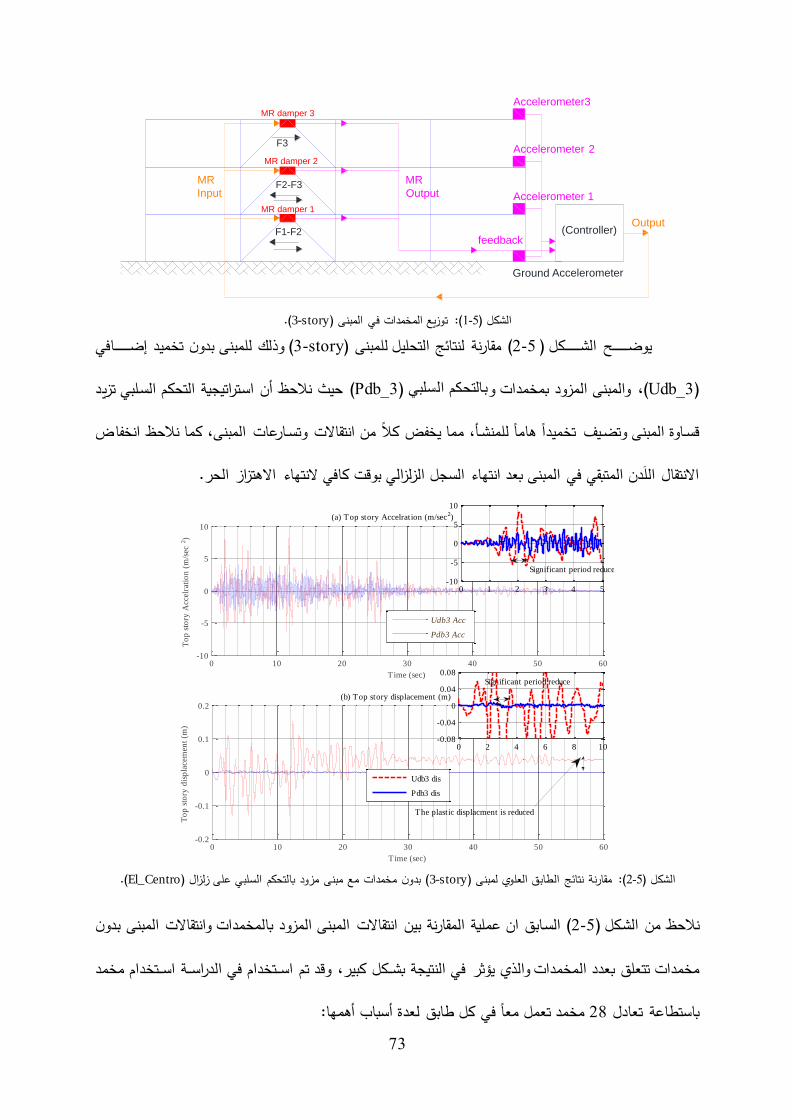
73
.(story-3مبنى )لا توزيع المخمدات في(: 1-5الشكل )
( وذلك للمبنى بدون تخميد إض افيstory-3مقارنة لنتائج التحليل للمبنى ) (2-5)الش كل يوض ح
(Udb_3)التحكم السلبيب، والمبنى المزود بمخمدات و (Pdb_3 ) د تزيالس لبي حيث نالحظ أن اس تراتيجية التحكم
نخفاض ، كما نالحظ اتس ارعات المبنىمن انتقاالت و مما يخفض كالً ،تخميدًا هامًا للمنش أتض يف قس اوة المبنى و
.الحر كافي النتهاء االهتزازاالنتقال الَلدن المتبقي في المبنى بعد انتهاء السجل الزلزالي بوقت
.(El_Centro( بدون مخمدات مع مبنى مزود بالتحكم السلبي على زلزال )story-3مبنى )الطابق العلوي لنتائج (: مقارنة 2-5)الشكل
ى بدون المبن وانتقاالتد بالمخمدات انتقاالت المبنى المزو بين مقارنة عملية الان ( الس ابق 2-5)الش كل نالحظ من
مخمد في الدراس ة اس تخدامتم اس تخدام وقد ،ي ثر في النتيجة بش كل كبير مخمدات والذيعدد الب تتعلقمخمدات
لعدة أسباب أهمها: مخمد تعمل معًا في كل طابق 28باستطاعة تعادل
F3
F2-F3
F1-F2 (Controller)
Accelerometer3
Accelerometer 2
Accelerometer 1
MR damper 3
MR damper 2
MR damper 1
Ground Accelerometer
feedback
MR
Input
Output
MR
Output
0 10 20 30 40 50 60-10
-5
0
5
10
(a) Top story Accelration (m/sec2)
T ime (sec)
To
p s
tory
Acc
elra
tio
n (
m/s
ec2)
Udb3 Acc
Pdb3 Acc
0 1 2 3 4 5-10
-5
0
5
10
0 10 20 30 40 50 60-0.2
-0.1
0
0.1
0.2(b) Top story displacement (m)
Time (sec)
To
p s
tory
dis
pla
cem
ent
(m)
0 2 4 6 8 10-0.08
-0.04
0
0.04
0.08
Udb3 dis
Pdb3 dis
The plastic displacment is reduced
Significant period reduce
Significant period reduce
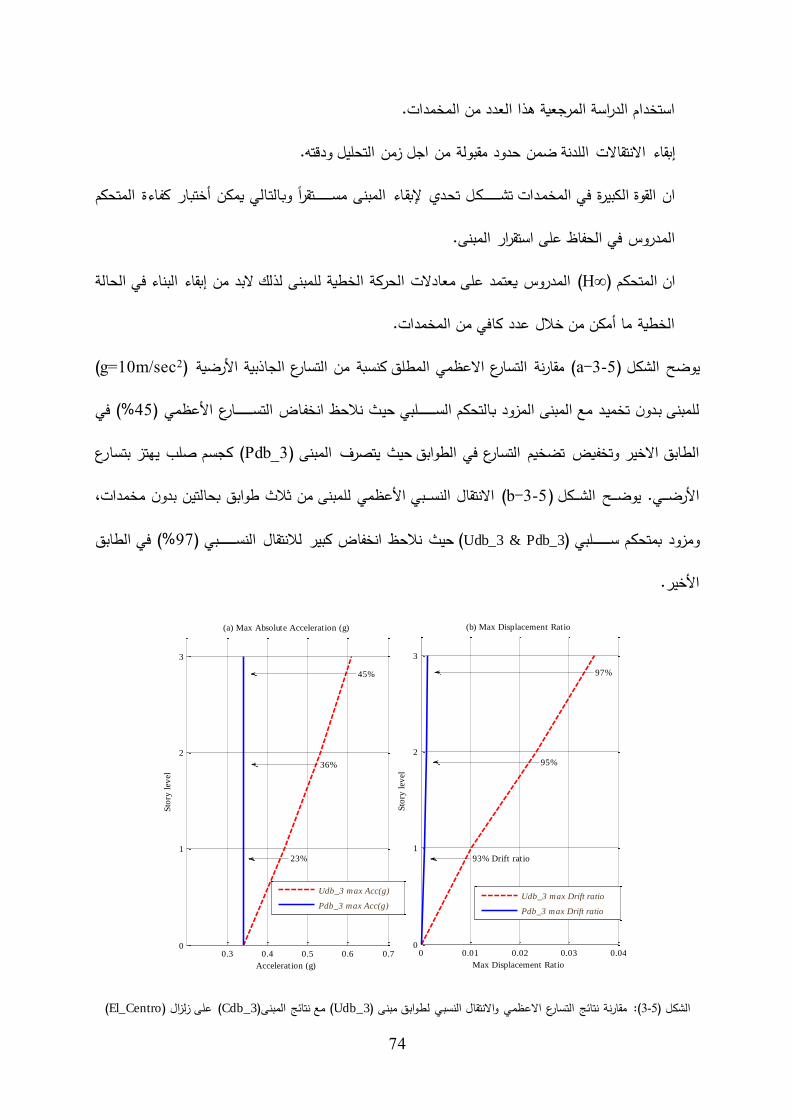
74
استخدام الدراسة المرجعية هذا العدد من المخمدات.
االنتقاالت اللدنة ضمن حدود مقبولة من اجل زمن التحليل ودقته.إبقاء
وب الت الي يمكن أختب ار كف اءة المتحكم ان القوة الكبيرة في المخم دات تش ك ل تح دي إلبق اء المبنى مس تقراً
.المدروس في الحفاظ على استقرار المبنى
لذلك البد من إبقاء البناء في الحالة يعتمد على معادالت الحركة الخطية للمبنىالمدروس ( ∞Hان المتحكم )
.الخطية ما أمكن من خالل عدد كافي من المخمدات
(2g=10m/secكنسبة من التسارع الجاذبية األرضية ) ( مقارنة التسارع االعظمي المطلقa-3-5)الشكل يوضح
في (%45) األعظمي حي ث نالحظ انخف اض التس ارع للمبنى ب دون تخمي د مع المبنى المزود ب التحكم الس لبي
( كجسم صلب يهتز بتسارع Pdb_3حيث يتصرف المبنى ) يض تضخيم التسارع في الطوابقفوتخ الطابق االخير
مخمدات،للمبنى من ثالث طوابق بحالتين بدون االنتقال النس بي األعظمي( b-3-5)الش كل . يوض ح األرض ي
في الطابق (%97) كبير لالنتقال النس بي( حيث نالحظ انخفاض Udb_3 & Pdb_3)ومزود بمتحكم س لبي
.األخير
( El_Centroعلى زلزال ) (Cdb_3)مبنىال نتائج مع (Udb_3)مبنى النسبي لطوابق االنتقالالتسارع االعظمي و نتائج مقارنة (:3-5)الشكل
0.3 0.4 0.5 0.6 0.70
1
2
3
(a) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Udb_3 max Acc(g)
Pdb_3 max Acc(g)
0 0.01 0.02 0.03 0.040
1
2
3
(b) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Udb_3 max Drift ratio
Pdb_3 max Drift ratio
45%
23%
36%
97%
95%
93% Drift ratio
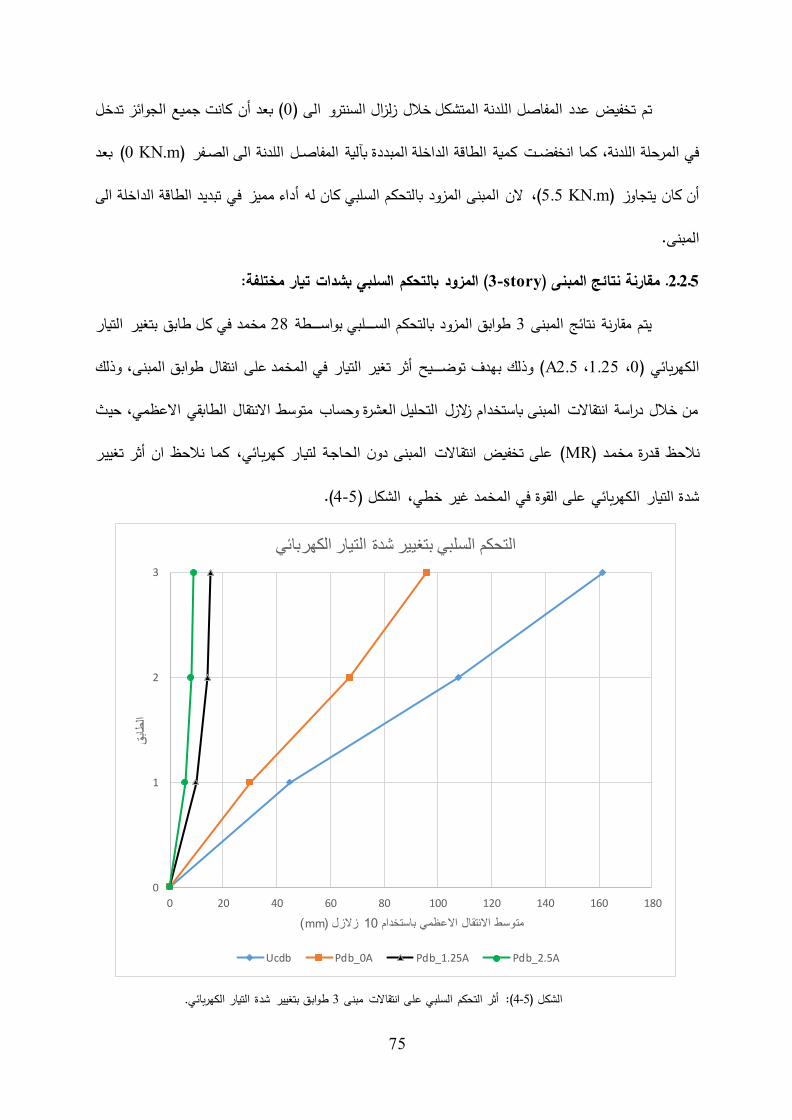
75
تدخل ( بعد أن كانت جميع الجوائز 0زلزال السنترو الى ) خاللالمتشكل اللدنةتخفيض عدد المفاصل تم
( بعد KN.m 0الى الص فر )المفاص ل اللدنة بآلية دة بدالمالداخلة الطاقة كمية تكما انخفض ، في المرحلة اللدنة
ى لفي تبديد الطاقة الداخلة ا زأداء مميالن المبنى المزود بالتحكم السلبي كان له (، KN.m 5.5أن كان يتجاوز )
المبنى.
بشدات تيار مختلفة: ( المزود بالتحكم السلبيstory-3مبنى )نتائج المقارنة .2ـ2ـ5
مخمد في كل طابق بتغير التيار 28طوابق المزود بالتحكم الس لبي بواس طة 3يتم مقارنة نتائج المبنى
وذلك ،ابق المبنى( وذلك بهدف توض يح أثر تغير التيار في المخمد على انتقال طو 2.5A، 1.25، 0الكهربائي )
من خالل دراسة انتقاالت المبنى باستخدام زالزل التحليل العشرة وحساب متوسط االنتقال الطابقي االعظمي، حيث
( على تخفيض انتق االت المبنى دون الح اج ة لتي ار كهرب ائي، كم ا نالحظ ان أثر تغيير MRنالحظ ق درة مخم د )
.(4-5الشكل )، غير خطيشدة التيار الكهربائي على القوة في المخمد
.بتغيير شدة التيار الكهربائيطوابق 3مبنى انتقاالت على التحكم السلبي أثر (:4-5الشكل )
0
1
2
3
0 20 40 60 80 100 120 140 160 180
قطاب
ال
(mm)زالزل 10متوسط االنتقال االعظمي باستخدام
التحكم السلبي بتغيير شدة التيار الكهربائي
Ucdb Pdb_0A Pdb_1.25A Pdb_2.5A
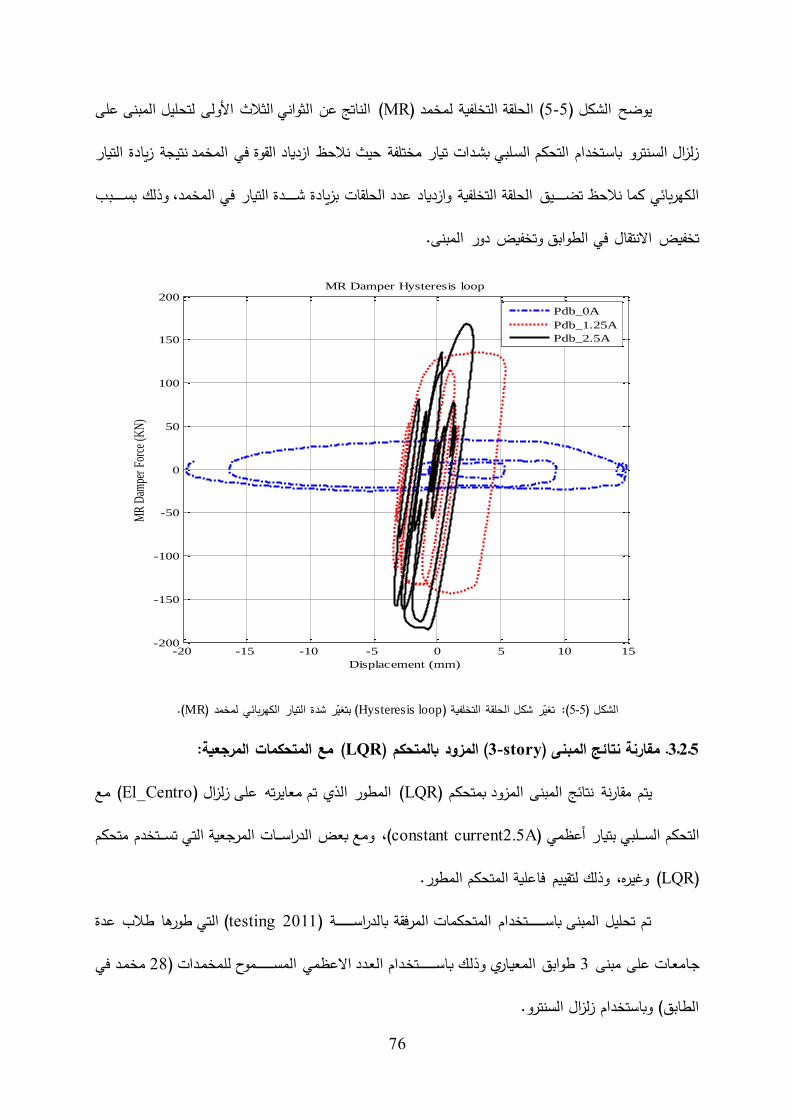
76
ثواني الثالث األولى لتحليل المبنى على ( الناتج عن الMRة لمخمد )تخلفي( الحلقة ال5-5الشكل )يوضح
جة زيادة التيار في المخمد نتي زلزال الس نترو باس تخدام التحكم الس لبي بش دات تيار مختلفة حيث نالحظ ازدياد القوة
وازدياد عدد الحلقات بزيادة ش دة التيار في المخمد، وذلك بس بب ة تخلفيال الكهربائي كما نالحظ تض يق الحلقة
تخفيض االنتقال في الطوابق وتخفيض دور المبنى.
(.MR( بتغّير شدة التيار الكهربائي لمخمد )Hysteresis loopتغّير شكل الحلقة التخلفية ) (:5-5الشكل )
:مرجعيةالمتحكمات ال( مع LQR( المزود بالمتحكم )story-3مبنى )نتائج المقارنة .3ـ2ـ5
( مع El_Centro( المطور الذي تم معايرته على زلزال )LQRمقارنة نتائج المبنى المزود بمتحكم ) يتم
المرجعية التي تس تخدم متحكم ات الدراس بعض ومع (،constant current2.5Aكم الس لبي بتيار أعظمي )التح
(LQR )وذلك لتقييم فاعلية المتحكم المطور.، وغيره
التي طورها طالب عدة (testing 2011)تم تحليل المبنى باس تخدام المتحكمات المرفقة بالدراس ة
مخم د في 28طوابق المعي اري وذل ك ب اس تخ دام الع دد االعظمي المس موي للمخم دات ) 3ج امع ات على مبنى
الطابق( وباستخدام زلزال السنترو.
-20 -15 -10 -5 0 5 10 15-200
-150
-100
-50
0
50
100
150
200
Displacement (mm)
MR
Dam
per
Forc
e (K
N)
MR Damper Hysteresis loop
Pdb_0A
Pdb_1.25A
Pdb_2.5A

77
( المطور، LQRللطابق األخير تتوافقق مع المتحكم ) عظميالنتقال األأص غر قيمة لحيث نالحظ أن
االعظمي للطابق األول )وبالتالي االنزياي النس بي االعظمي للبناء( يتوافق مع متحكم نتقالأص غر قيمة لالأن و
(H∞ ،) وبالتالي يمكن أعتباره المتحكم األفض ل والذي تم دراس ة أثره بش كل مفص ل الحقًا، كما نالحظ أن أفض ل
( المطور، كما ∞Hمتحكم )( والذي يتش ابه في أس اس ه النظري مع H2wالمتحكمات المرجعية أداًء هو متحكم )
(:1-5الجدول )( و 6-5الشكل )يوضح
(testing 2011)مرجعية ال االستراتيجياتو المطورةتحكم الاستراتيجيات باستخداملطوابق لمبنى الثالث طوابق نتائج انتقال امقارنة (:6-5الشكل )
.السنترووزالزل
.السنتروزالزل على (testing 2011)مرجعية الجديدة و التحكم الانتقال الطوابق لمبنى الثالث طوابق على استراتيجيات نتائجمقارنة (: 1-5الجدول )
Controller 1St_Story (mm) 2nd_Story (mm) 3rd_Story (mm)
Pdb_2.5A 2.5Passive 3.4 5.2 6.1
Ref_1 FLC: Fuzzy Logic 2.9 7.9 14.2
Ref_2 H2w Filter 3.3 5.1 6.0
Ref_3 LYAPUNOV 9.2 18.4 24.6
Ref_4 LQR 8.9 14.3 16.3
Ref_5 LQG 12.7 24.0 30.9
New Controller_1 pole placment 4.5 5.7 6.5
New Controller_2 (LQRالمطور ) 5.5 4.6 2.8
New Controller_3 H∞ 2.6 4.9 5.6
0
1
2
3
0 5 1 0 1 5 2 0 2 5 3 0 3 5
قابط
ال
(MM)االنتةا الطابةي االعظمي
Pdb_2.5A
Ref_1
Ref_2
Ref_3
Ref_4
Ref_5
pole placment
LQR
H-inf

78
طوابق مقارنة بالتحكم 3( أهم المتحكمات التي نجحت في تحس ين اس تجابة مبنى 7-5الش كل )يوض ح
( المطور في البحث يعطي أفض ل انتقال للطابق العلوي LQRالس لبي حيث نالحظ انه بالرغم من أن متحكم )
نزياي نسبي وهو المعيار األهم في تصميم األبنية.( يعطي أفضل ا∞Hلكن المتحكم )
.السنترووزالزل للمقارنة التحكم مقارنًة بالتحكم السلبينتائج انتقال الطوابق لمبنى الثالث طوابق على استراتيجيات (:7-5الشكل )
( مع مبنى مزود بالتحكم السلبي:∞Hالمزود بالمتحكم )( story-3مبنى )نتائج المقارنة .4ـ2ـ5
( مع El_Centro( ال ذي تم مع ايرت ه على نت ائج زلزال )∞Hمق ارن ة نت ائج المبنى المزود بمتحكم ) يتم
م constant current2.5Aالتحكم الس لبي بتيار أعظمي ) (، وذلك على الزالزل االربعة الرئيس ية من اجل تقيَي
ته على تحسين االستجابة على مختلف الزالزل.مناعة المتحكم وقدر
التحكم ب( وذلك للمبنى المزود بمخمدات وstory-3( مقارنة لنتائج التحليل للمبنى )8-5)الش كل يوض ح
ولوحظ أن اس تراتيجية التحكم ش به ، (Cdb_3مع المبنى المزود بالتحكم ش به اإليجابي ) (،Pdb_3) السددددلبي
معي ار ك المطلق تم مع ايرة المتحكم به دف تخفيض االنتق ال االعظميحي ث ال االعظمي )اإليج ابي تخفض االنتق
( تطابق س جل التس ارع a-8-5، كما نالحظ في الش كل)للتحكم( لكنها ال تخفض االنتقال في معظم الس جل الزمني
ى ان المبن ( مع الس جل الزمني للتس ارع األرض ي مما يدلPdb_3( والمبنى )Cdb_3للطابق األخير للمبنى )
.شكل قسري بالتسارع األرضيمزود بالمخمدات يهتز كجسم صلب وب
0
1
2
3
0 1 2 3 4 5 6 7
قابط
ال
(MM)االنتةا الطابةي االعظمي
Pdb_2.5A Ref_2 (H2w) LQR H-inf

79
(Cdb_3( ومبنى )Pdb_3مقارنة السجل الزمني النتقال وتسارع الطابق األخير لمبنى الثالث طوابق) (:8-5)الشكل
لمبنى النس بي االعظمي والتس ارع الطابقي االعظمي ل االنتقالمقارنة لنتائج (9-5)الش كل يوض ح
(Pdb_3 )ومبنى (Cdb_3حيث يخفض التحكم الش به اإلي ) وذلك بالرغم من (، %8النس بي بنس بة ) االنتقالجابي
هذالتسارع الطابقي االعظمي فان ه يزيدمن ان التحكم وبالرغمكما نالحظ أنه .جديدة للمبنى عدم إضافة أي قوى
(.g*0.001تجاوز )تال زيادةال
0 1 2 3 4 5 6-4
-2
0
2
4 max Acc
El_Centro
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
elra
tion (
m/s
ec2)
0 1 2 3 4 5 6-6
-4
-2
0
2
4
x 10-3
max dis
El_Centro
(b) Top story displacement (m)
Time (sec)
dis
pla
cem
ent
(m)
passive dis
Control dis
0.33 0.335 0.34 0.345 0.350
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.5 1 1.5
x 10-3
0
1
2
3
(d) Max Displacement Ratio
Max Dispalcement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
2.05 2.1 2.15 2.2
2.6
2.8
3
3.2
3.4
passive Acc
Control Acc
El_centro
8%
max Drift
0.001*g

80
باستخدام السنترو. (Cdb_3) ( ومبنىPdb_3النسبي االعظمي والتسارع الطابقي االعظمي للمبنى ) االنتقالمقارنة لنتائج (: 9-5)الشكل
على تخفيض نتائج باس تخدام الس نترو فالبد من تأكد من مناعة المتحكم ( ∞H)نجاي المتحكم بالرغم من
زلزالية مختلفة من حيث تربة الموقع والتض خيم الزلزالي، القرب أو البعد عن المص در الزلزالي، ش دة على س جالت
رو، تتجربته على الزالزل العش رة المذكورة س ابقًا واس تعراض نتائج الزالزل الرئيس ية )الس ن تتم، وقد الزلزال
:مع مالحظة ما يلي األشكال التاليةهاشينوهي، نورث رد ، كوبي( الموضحة في
بقاء المبنى صلبًا دون اختالف كبير في استجابة التسارع للطوابق. .1
قيم التحكم السلبي.بقاء قيم االنتقال واالنزياي قريبة من .2
ن المتحكم أبالرغم ،تغيير في ش دة االثارة الزلزاليةال ،مما يدل على قدرة المتحكم على العمل في ظروف متفاوتة
في موقع محدد ولن يواجه البناء هذا التفاوت الشديد في الشدة الزلزالية.معاير من أجل سجل زلزال السنترو
مبنى و ،(Pdb_3)سلبي ثالث طوابق مع تحكم والتسارع الطابقي لمبنىنسبة االنتقال االعظمي تمت مقارنة .( a,b,c,d, 10-5في االشكال ) مبين ، كماهوالسنترو( على زلزال Cdb_3) (∞Hمتحكم )ثالث طوابق مع
0.32 0.325 0.33 0.335 0.34 0.345 0.350
1
2
3
(a) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry level
Pdb_3 max Acc(g)
Cdb_3 max Acc(g)
0 0.5 1 1.5
x 10-3
0
1
2
3
(b) Max Displacement Ratio
Max Displacement Ratio
Sto
ry level
Pdb_3 max Drift ratio
Cdb_3 max Drift ratio
8%0.001*g
max drift ratio
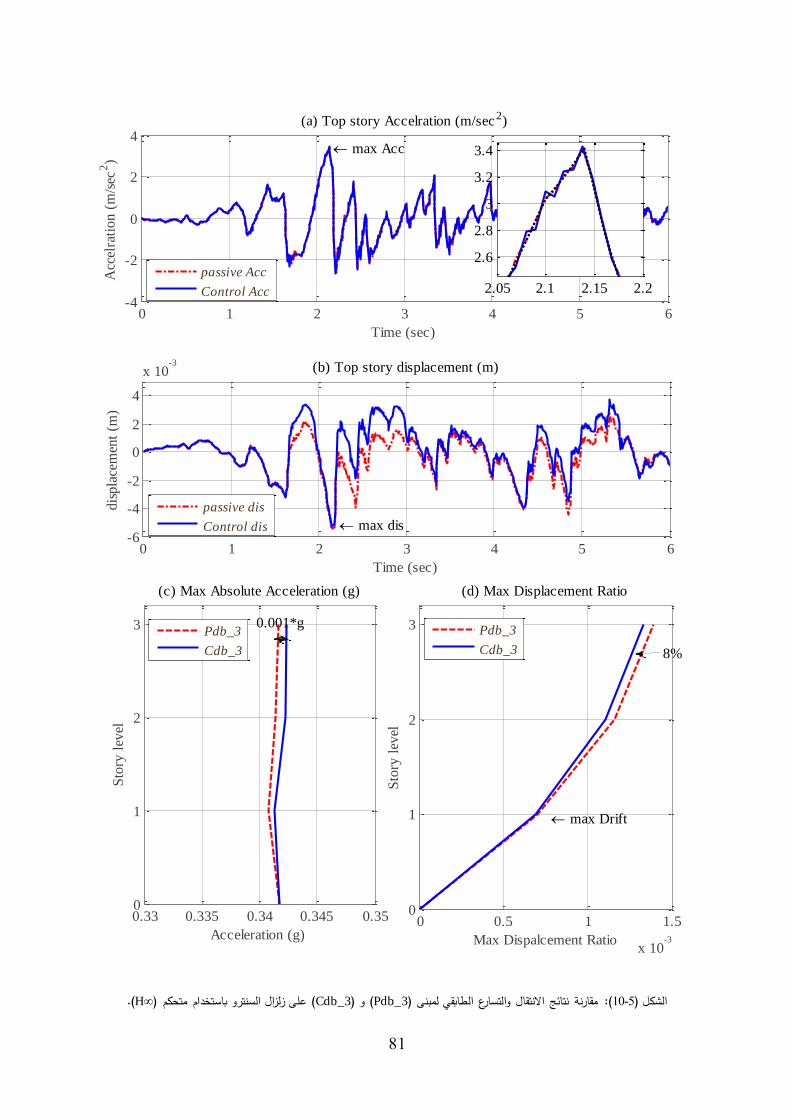
81
.(∞H( على زلزال السنترو باستخدام متحكم )Cdb_3)و ( Pdb_3الطابقي لمبنى )النتقال والتسارع امقارنة نتائج (:10-5الشكل )
0 1 2 3 4 5 6-4
-2
0
2
4 max Acc
El_Centro
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
elra
tion (
m/s
ec2)
passive Acc
Control Acc
0 1 2 3 4 5 6-6
-4
-2
0
2
4
x 10-3
max dis
El_Centro
(b) Top story displacement (m)
Time (sec)
dis
pla
cem
ent
(m)
passive dis
Control dis
0.33 0.335 0.34 0.345 0.350
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.5 1 1.5
x 10-3
0
1
2
3
(d) Max Displacement Ratio
Max Dispalcement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
2.05 2.1 2.15 2.2
2.6
2.8
3
3.2
3.4
8%
max Drift
0.001*g

82
و ،(Pdb_3)سلبي ثالث طوابق مع تحكم االنتقال االعظمي والتسارع الطابقي لمبنى مقارنة نسبةوكذلك تمت .( a,b,c,d, 11-5في االشكال ) ، كماهاشينوهي( على زلزال Cdb_3) (∞Hمتحكم )مبنى ثالث طوابق مع
.(∞Hباستخدام متحكم ) يهاشينوه( على زلزال Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:11-5الشكل )
0 1 2 3 4 5 6
-2.5
0
2.5
x 10-3
max dis
Hachinohe
(b) Top story displacement (m)
Time (sec)
dis
pla
cem
ent
(m)
passive dis
Control dis
0.2 0.21 0.22 0.23 0.24 0.250
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.25 0.5 0.75 1
x 10-3
0
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
0 1 2 3 4 5 6-3
-2
-1
0
1
2
3 max Acc
(a) Top story Acceleration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
Hachinohe
passive Acc
Control Acc
Northrdg
0.004*g
max drift ratio -12%

83
و ،(Pdb_3) ثالث طوابق مع تحكم سلبي نسبة االنتقال االعظمي والتسارع الطابقي لمبنىوكذلك تمت مقارنة في االشكال كما ،، وزلزال كوبينورث ريد ( على زلزالCdb_3) (∞Hمتحكم )مبنى ثالث طوابق مع
(a,b,c,d, 12-5 ) و(a,b,c,d, 13-5 ) على التوالي.
.(∞Hد باستخدام متحكم )ي( على زلزال نورث ر Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:12-5الشكل )
2 3 4 5 6 7 8-10
-5
0
5
10 max Acc
(a) Top story Acceleration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
4.1 4.2 4.3 4.4
4
6
8 max Acc
2 3 4 5 6 7 8-0.1
-0.05
0
0.05
0.1
max dis
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0.8 0.82 0.840
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.005 0.01 0.015 0.020
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
max Acc
max dis max dis
Pdb_3
Cdb_3
passive Acc
Control Acc
Northridg
max drift ratio
-9%
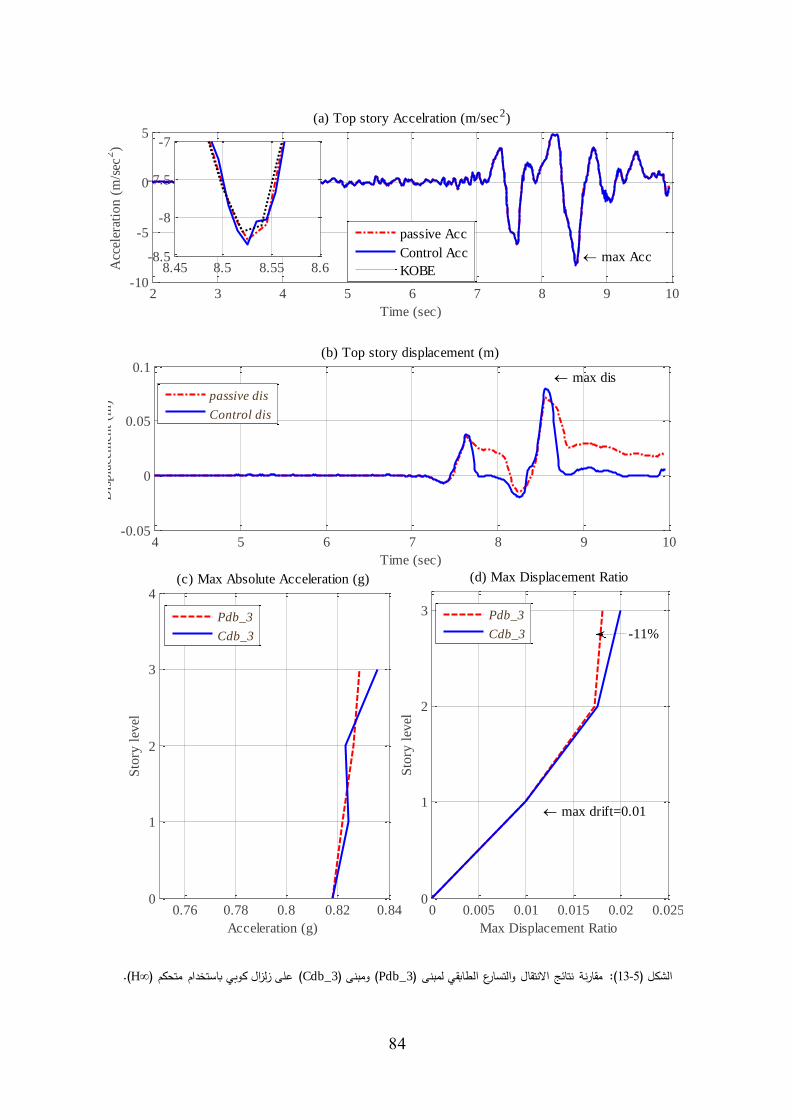
84
.(∞Hباستخدام متحكم )( على زلزال كوبي Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:13-5الشكل )
2 3 4 5 6 7 8 9 10-10
-5
0
5
max Acc
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
8.45 8.5 8.55 8.6-8.5
-8
-7.5
-7
4 5 6 7 8 9 10-0.05
0
0.05
0.1 max dis
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0.76 0.78 0.8 0.82 0.840
1
2
3
4(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.005 0.01 0.015 0.02 0.0250
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
max dis
Pdb_3
Cdb_3
passive Acc
Control Acc
KOBE
max drift=0.01
-11%

85
( لكن يختلف عنه في طريقة حس اب معيار األداء حيث ∞H( الش بيه بمتحكم )H2نتائج متحكم )نبين
في كما ،ات وس جالت زلزالية مختلفةعلى تخفيض اس تجابة االنتقال ومناعته على ش دّ (H2) نالحظ قدرة المتحكم
.( على التوالي17-5الشكل )(، و 16-5الشكل )(، و 15-5الشكل )(، و 14-5الشكل )االشكال
.(2H( على زلزال السنترو باستخدام متحكم )Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:14-5الشكل )
0 1 2 3 4 5 6-4
-2
0
2
4 max Acc
2
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (m
/sec
2)
2.4 2.6 2.8-3
-2
-1
0
0 1 2 3 4 5 6-6
-4
-2
0
2
4
x 10-3
max dis
2
(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
passive dis
Control dis
0.32 0.33 0.34 0.350
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.5 1 1.5
x 10-3
0
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
passive Acc
Control Acc
El_centro
-12%
-12%

86
.(2Hباستخدام متحكم ) هاشينوهي( على زلزال Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:15-5الشكل )
0 1 2 3 4 5 6 7 8-2
-1
0
1
2
3 max Acc
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
passive Acc
Control Acc
4.05 4.1 4.15 4.2 4.250.5
1
1.5
2
2.5
0 1 2 3 4 5 6 7 8
-2.5
0
2.5
x 10-3
max dis
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0.2 0.22 0.24 0.260
1
2
3
4(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.2 0.4 0.6 0.8 1
x 10-3
0
1
2
3
4(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
-14% Drift ratio
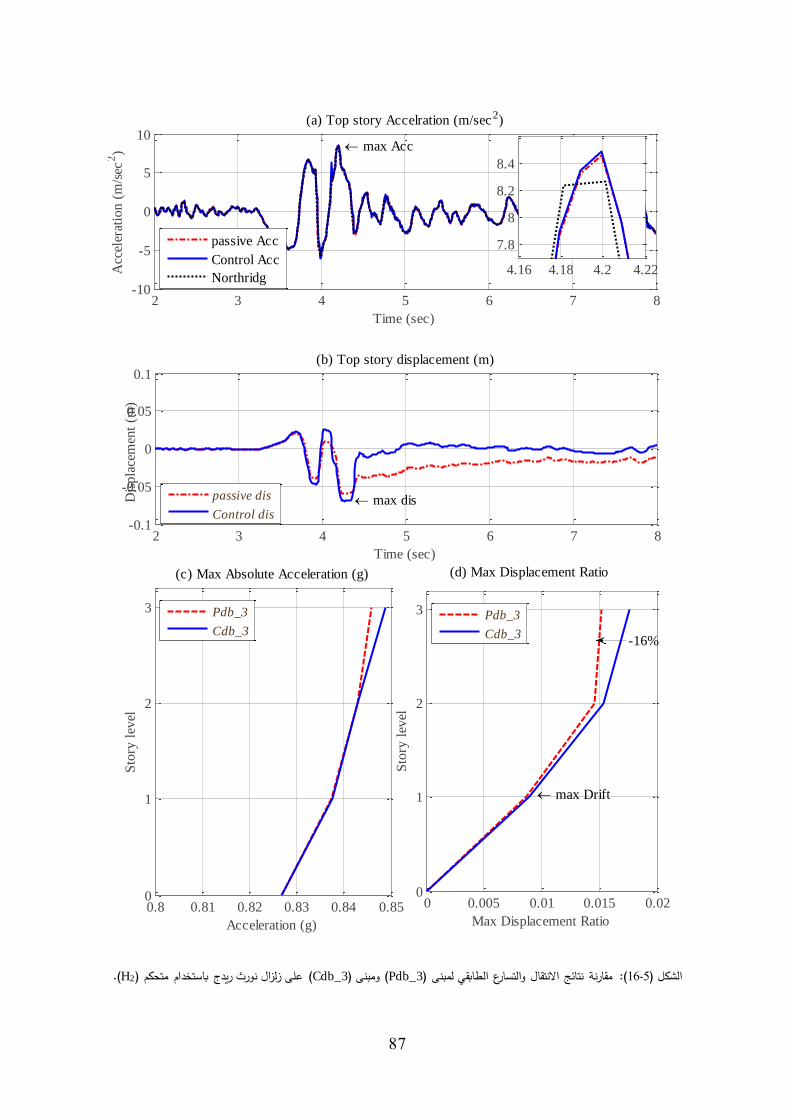
87
.(2Hد باستخدام متحكم )ي( على زلزال نورث ر Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:16-5الشكل )
2 3 4 5 6 7 8-10
-5
0
5
10 max Acc
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
4.16 4.18 4.2 4.22
7.8
8
8.2
8.4
2 3 4 5 6 7 8-0.1
-0.05
0
0.05
0.1
max dis
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0.8 0.81 0.82 0.83 0.84 0.850
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.005 0.01 0.015 0.020
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
passive Acc
Control Acc
Northridg
-16%
max Drift
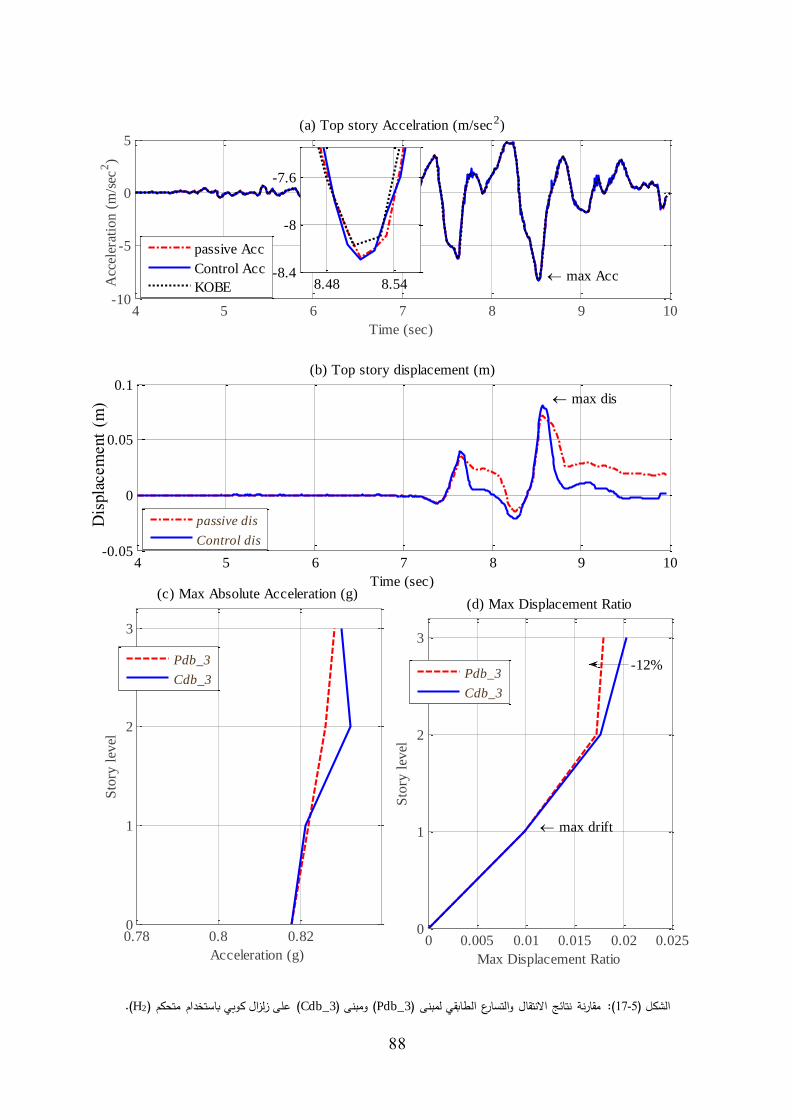
88
.(2H( على زلزال كوبي باستخدام متحكم )Cdb_3( ومبنى )Pdb_3مقارنة نتائج االنتقال والتسارع الطابقي لمبنى ) (:17-5الشكل )
4 5 6 7 8 9 10-10
-5
0
5
max Acc
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
8.48 8.54-8.4
-8
-7.6
4 5 6 7 8 9 10-0.05
0
0.05
0.1 max dis
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0.78 0.8 0.820
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3
Cdb_3
0 0.005 0.01 0.015 0.02 0.0250
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_3
Cdb_3
passive Acc
Control Acc
KOBE
max drift
-12%
Dis
pla
cem
ent
(m)

89
( نت ائج انتق ال الطوابق لمبنى الثالث طوابق على اس تراتيجي ات التحكم: ب دون تحكم 2-5الج دول )يبين
(UCb_3( مع تحكم س لبي ،)Pdb_3( مع تحكم ش به إيجابي )Cdb_3( بواس طة )∞H( وبواس طة )2H )
ية العشرة:المختلفة وباستخدام السجالت الزلزال
وزالزل مختلفة. نتائج انتقال الطوابق لمبنى الثالث طوابق على استراتيجيات تحكم: (2-5الجدول )Story Displacment (mm) D_S1 D_S2 D_S3 Story Displacment (mm) D_S1 D_S2 D_S3
UCb_3_0.5 ElCentro 28 62 86 Cdb_3_0.5 ElCentro 1 2 3
UCb_3_1.0 ElCentro 41 93 140 Cdb_3_1.0 ElCentro 3 4 5
UCb_3_1.5 ElCentro 53 123 170 Cdb_3_1.5 ElCentro 12 17 18
UCb_3_0.5 Hachinohe 16 37 59 Cdb_3_0.5 Hachinohe 1 1 2
UCb_3_1.0 Hachinohe 33 80 124 Cdb_3_1.0 Hachinohe 2 3 4
UCb_3_1.5 Hachinohe 44 110 188 Cdb_3_1.5 Hachinohe 3 5 6
UCb_3_0.5 Northridg 51 105 154 Cdb_3_0.5 Northridg 6 8 9
UCb_3_1.0 Northridg 68 174 271 Cdb_3_1.0 Northridg 35 59 66
UCb_3_0.5 Kobe 46 121 187 Cdb_3_0.5 Kobe 6 9 10
UCb_3_1.0 Kobe 59 149 263 Cdb_3_1.0 Kobe 40 70 79
Pdb_3_0.5 ElCentro 1 2 3 Cdb_3_0.5 ElCentro 1 2 2
Pdb_3_1.0 ElCentro 3 5 6 Cdb_H2_3_1.0 ElCentro 2 4 5
Pdb_3_1.5 ElCentro 12 16 17 Cdb_H2_3_1.5 ElCentro 12 17 19
Pdb_3_0.5 Hachinohe 1 1 2 Cdb_H2_3_0.5 Hachinohe 1 2 2
Pdb_3_1.0 Hachinohe 2 3 4 Cdb_H2_3_1.0 Hachinohe 2 3 4
Pdb_3_1.5 Hachinohe 3 5 6 Cdb_H2_3_1.5 Hachinohe 4 6 7
Pdb_3_0.5 Northridg 5 7 8 Cdb_H2_3_0.5 Northridg 6 10 13
Pdb_3_1.0 Northridg 34 58 60 Cdb_H2_3_1.0 Northridg 35 61 70
Pdb_3_0.5 Kobe 6 8 9 Cdb_H2_3_0.5 Kobe 6 8 10
Pdb_3_1.0 Kobe 39 69 72 Cdb_H2_3_1.0 Kobe 40 70 81
( متوس ط نتائج االنتقال الطابقي للزالزل العش رة باس تخدام اس تراتيجيات التحكم حيث نالحظ 18-5لش كل )ايوض ح
من التحكم ش به اإليجابي على اغلب الزالزل المدروس ة وبفرو تص ل لل أنه بالرغم أن التحكم الس لبي كان أفض ل
نما اج الية و ات الزلز التذكير أن المتحكم ليس مص مم ليتكيف مع هذا النوع من التفاوت في الش دّ لكن يجب ، (10%)
بحث يوص ي ال لذا وس جالت ذات طبيعة مش ابهة من حيث الش دة والتردد،الس نترو مص مم ومعاير ليعمل مع زلزال
ف مع تغيير الشدات الزلزالية.يّ بدراسة أثر استخدام التحكم المتك

90
متوسط نتائج االنتقاالت للزالزل العشرة باستخدام استراتيجيات التحكم المختلفة. (:18-5لشكل )ا
استراتيجيات التحكم المختلفة.متوسط نتائج االنتقاالت للزالزل العشرة باستخدام : (3-5الجدول )
Control strategy displacment (mm) D_S1 D_S2 D_S3
Uncontrol 44 106 164
Passive 11 17 18
Control_ H∞ 11 18 20
Control_H2 11 18 21
( متوس ط نت ائج مع ايير األداء وهي على الترتي ب: االنزي اي الط ابقي األعظم، 4-5الج دول )يوض ح
في نهاية (،Drift _end) االنزياي الطابقي اللدن المتبقي(، Drift _rms) االنحراف المعياري لالنزياي الطابقي
، (Acc_rms) واالنحراف المعياري للتس ارع الطابقي(، PGA) اي (gاالعظمي كنس بة من )التس ارع التحليل،
، الطاقة المبددة في هذه المفاصل.اللدنةعدد المفاصل
التحكم المختلفة.متوسط نتائج معايير األداء للزالزل العشرة باستخدام استراتيجيات (: 4-5الجدول )
Strategy Drift
peak
Drift _rms
*10-3
Drift _end PGA Acc
rms
(m.sec2)
Number of
palstic hinge Disspate Enrgy
at plastic hinge
KN.m
Uncontrol 0.019 2.244 0.004 0.683 0.082 14
13.33
Passive 0.003 0.244 0.000 0.428 0.044 1 0.02
H∞ 0.003 0.438 0.000 0.431 0.093 1 0.03
H2 0.003 0.203 0.000 0.432 0.043 1 0.03
0
0.5
1
1.5
2
2.5
3
3.5
0 20 40 60 80 100 120 140 160 180
قطاب
ال
(mm)االنتقال
uncontrol
Passive
Control
Control_H2

91
ع كما يجب اإلش ارة انه ليس من المتوق، و المتحكمللمص مم اس تخدام أي من المعايير الس ابقة كهدف لتص ميم يمكن
دًا اض افية يفرض قيو نما اج قوى جديدة على البناء و ذلك الن التحكم ال يض يف أي ،أن يعطي المتحكم نتائجًا أفض ل
على مخمدات المبنى ويجب استخدامه بتوزيع مختلف للمخمدات على المبنى كما توضح الفقرات القادمة.
توزيع مختلف للمخمدات:مع طوابق 3نتائج بناء .3ـ5
:األولالمخمد في الطابق .1ـ3ـ5
تم اس تخ دام المخم دات في الط ابق األول فقط ومق ارنته ا مع المبنى ب دون تحكم والمبنى مزود ب التحكم
الس لبي حيث نالحظ أثر اس تخدام التحكم ش به اإليجابي الملحوظ في تحس ين اس تجابة االنتقال واالنزياي النس بي
(، حيث قام المتحكم بتوزيع االنزياي النس بي بش كل أفض ل على 19-5الش كل )للطوابق على طول الس جل الزمني،
طوابق المبنى بعد أن كانت المخمدات تقوم بتثبيت حركة الطابق األول ناقلة االهتزاز األرضي للطوابق العليا.
والتسارع لمبنى الثالث طوابق والمخمدات في الطابق األول على استراتيجيات التحكم وزلزال السنترو. االنتقالنتائج (:19-5الشكل )
0 1 2 3 4 5 6-10
-5
0
5
10
2
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (m
/sec
2 )
Pdb Acc
Cdb Acc
UCdb Acc 3.2 3.4 3.6-2
0
2
4
0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2
2
(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
Pdb dis
Cdb dis
UCdb dis 2.4 2.6 2.8 3 3.20.06
0.11
0.15
0.2 0.3 0.4 0.5 0.6 0.70
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Stor
y le
vel
Pdb_3_1st
Cdb_3_1st
UCdb_3_1st
0 0.01 0.02 0.03 0.040
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Stor
y le
vel
Pdb_3_1st
Cdb_3_1st
UCdb_3_1st
10%33%
Drift=0.11
Drift=0.13
Drift=0.16
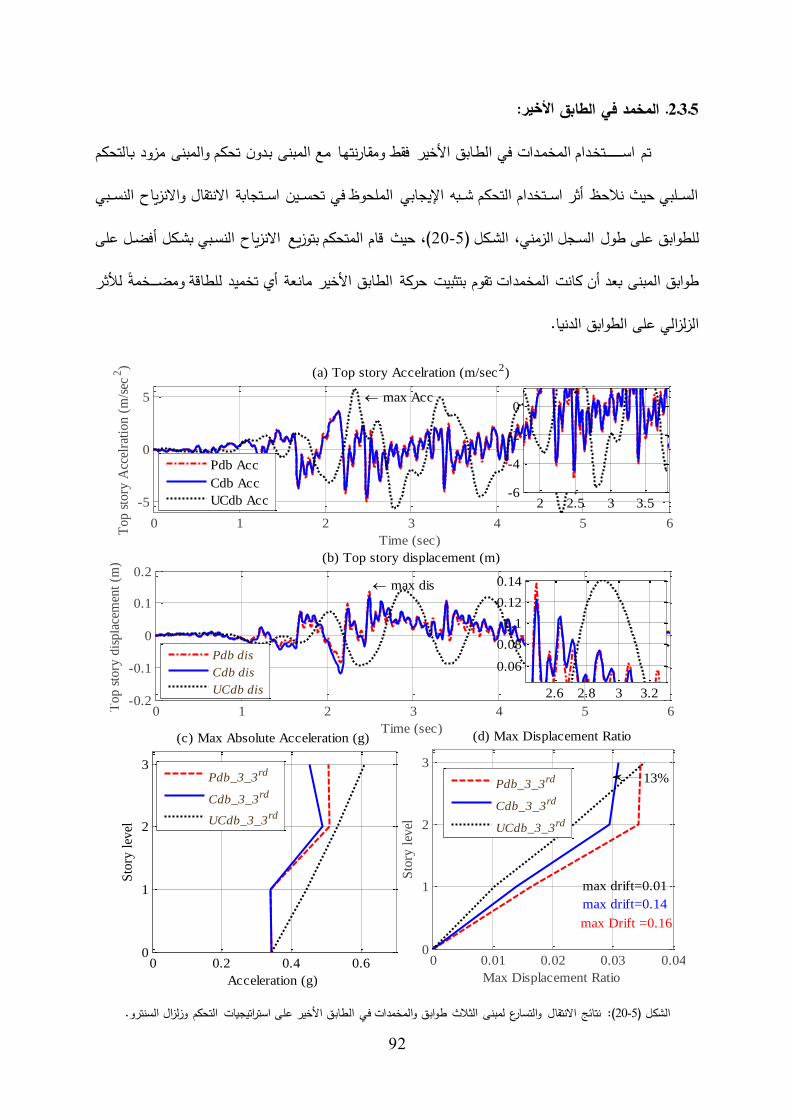
92
:األخيرالمخمد في الطابق .2ـ3ـ5
تم اس تخ دام المخم دات في الط ابق األخير فقط ومق ارنته ا مع المبنى ب دون تحكم والمبنى مزود ب التحكم
الس لبي حيث نالحظ أثر اس تخدام التحكم ش به اإليجابي الملحوظ في تحس ين اس تجابة االنتقال واالنزياي النس بي
(، حيث قام المتحكم بتوزيع االنزياي النس بي بش كل أفض ل على 20-5الش كل )للطوابق على طول الس جل الزمني،
ثر أي تخميد للطاقة ومض خمًة لأل األخير مانعةطوابق المبنى بعد أن كانت المخمدات تقوم بتثبيت حركة الطابق
.الزلزالي على الطوابق الدنيا
والتسارع لمبنى الثالث طوابق والمخمدات في الطابق األخير على استراتيجيات التحكم وزلزال السنترو. االنتقالنتائج (:20-5الشكل )
0 1 2 3 4 5 6
-5
0
5 max Acc
2
(a) Top story Accelration (m/sec2)
Time (sec)
Top s
tory
Acc
elra
tion (
m/s
ec2)
2 2.5 3 3.5-6
-4
-2
0
0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2 max dis
2
(b) Top story displacement (m)
Time (sec)
Top s
tory
dis
pla
cem
ent
(m)
Pdb dis
Cdb dis
UCdb dis 2.6 2.8 3 3.2
0.06
0.08
0.1
0.12
0.14
0 0.2 0.4 0.60
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3_3rd
Cdb_3_3rd
UCdb_3_3rd
0 0.01 0.02 0.03 0.040
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_3_3
rd
Cdb_3_3rd
UCdb_3_3rd
Pdb Acc
Cdb Acc
UCdb Acc
13%
max Drift =0.16
max drift=0.14
max drift=0.01
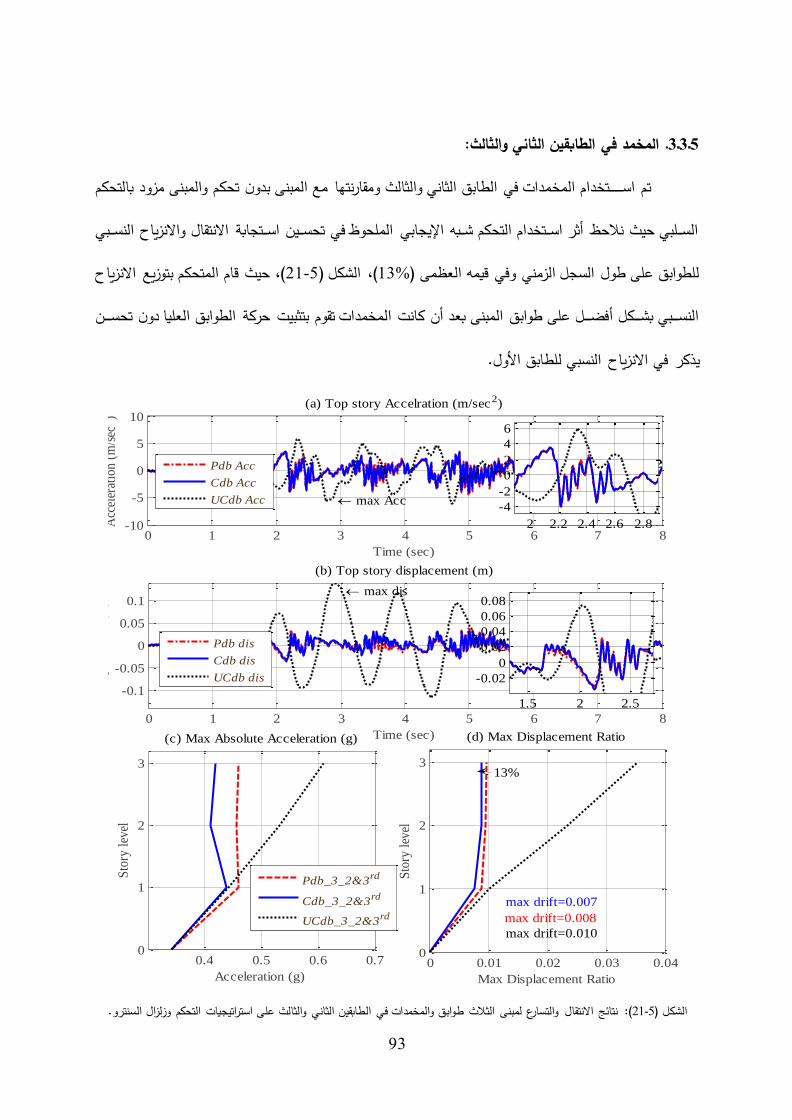
93
المخمد في الطابقين الثاني والثالث: .3ـ3ـ5
ومقارنتها مع المبنى بدون تحكم والمبنى مزود بالتحكم تم اس تخدام المخمدات في الطابق الثاني والثالث
الس لبي حيث نالحظ أثر اس تخدام التحكم ش به اإليجابي الملحوظ في تحس ين اس تجابة االنتقال واالنزياي النس بي
(، حيث قام المتحكم بتوزيع االنزياي 21-5الشكل )، (%13وفي قيمه العظمى ) للطوابق على طول السجل الزمني
النس بي بش كل أفض ل على طوابق المبنى بعد أن كانت المخمدات تقوم بتثبيت حركة الطوابق العليا دون تحس ن
في االنزياي النسبي للطابق األول. يذكر
والتسارع لمبنى الثالث طوابق والمخمدات في الطابقين الثاني والثالث على استراتيجيات التحكم وزلزال السنترو. االنتقالنتائج (:21-5الشكل )
0 1 2 3 4 5 6 7 8-10
-5
0
5
10
max Acc
2
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (m
/sec
2)
Pdb Acc
Cdb Acc
UCdb Acc
2 2.2 2.4 2.6 2.8
-4
-2
0
2
4
6
0 1 2 3 4 5 6 7 8
-0.1
-0.05
0
0.05
0.1 max dis
(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
Pdb dis
Cdb dis
UCdb dis
1.5 2 2.5
-0.02
0
0.02
0.04
0.06
0.08
0.4 0.5 0.6 0.70
1
2
3
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_3_2&3rd
Cdb_3_2&3rd
UCdb_3_2&3rd
0 0.01 0.02 0.03 0.040
1
2
3
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
13%
max drift=0.007
max drift=0.008
max drift=0.010
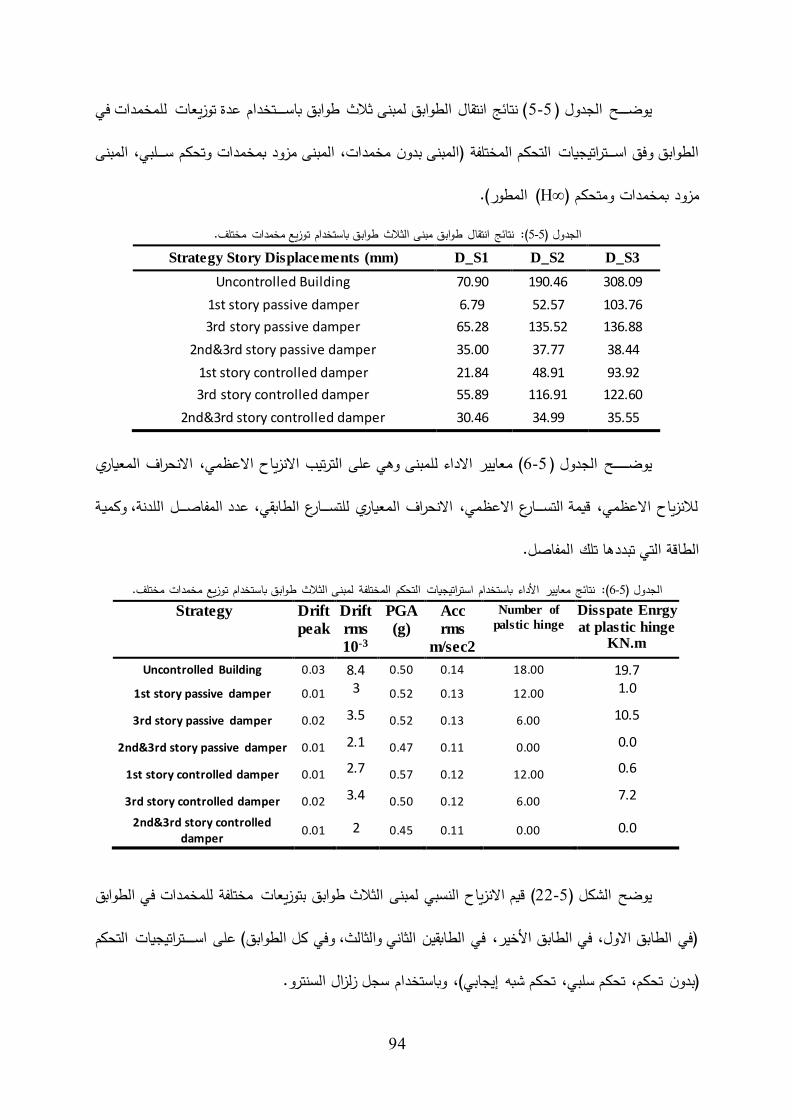
94
( نتائج انتقال الطوابق لمبنى ثالث طوابق باس تخدام عدة توزيعات للمخمدات في 5-5الجدول )يوض ح
الطوابق وفق اس تراتيجيات التحكم المختلفة )المبنى بدون مخمدات، المبنى مزود بمخمدات وتحكم س لبي، المبنى
( المطور(.∞Hمزود بمخمدات ومتحكم )
مبنى الثالث طوابق باستخدام توزيع مخمدات مختلف.انتقال طوابق جنتائ: (5-5الجدول )
Strategy Story Displacements (mm) D_S1 D_S2 D_S3
Uncontrolled Building 70.90 190.46 308.09
1st story passive damper 6.79 52.57 103.76
3rd story passive damper 65.28 135.52 136.88
2nd&3rd story passive damper 35.00 37.77 38.44
1st story controlled damper 21.84 48.91 93.92
3rd story controlled damper 55.89 116.91 122.60
2nd&3rd story controlled damper 30.46 34.99 35.55
وهي على الترتيب االنزياي االعظمي، االنحراف المعياري ( معايير االداء للمبنى 6-5الجدول )يوض ح
لالنزياي االعظمي، قيمة التس ارع االعظمي، االنحراف المعياري للتس ارع الطابقي، عدد المفاص ل اللدنة، وكمية
ها تلك المفاصل.الطاقة التي تبدد
لمبنى الثالث طوابق باستخدام توزيع مخمدات مختلف. معايير األداء باستخدام استراتيجيات التحكم المختلفة جنتائ: (6-5الجدول )
Strategy Drift
peak
Drift
rms
10-3
PGA
(g)
Acc
rms
m/sec2
Number of
palstic hinge Disspate Enrgy
at plastic hinge KN.m
Uncontrolled Building 0.03 8.4 0.50 0.14 18.00 19.7
1st story passive damper 0.01 3 0.52 0.13 12.00 1.0
3rd story passive damper 0.02 3.5 0.52 0.13 6.00 10.5
2nd&3rd story passive damper 0.01 2.1 0.47 0.11 0.00 0.0
1st story controlled damper 0.01 2.7 0.57 0.12 12.00 0.6
3rd story controlled damper 0.02 3.4 0.50 0.12 6.00 7.2
2nd&3rd story controlled damper
0.01 2 0.45 0.11 0.00 0.0
ي الطوابق ف قيم االنزياي النسبي لمبنى الثالث طوابق بتوزيعات مختلفة للمخمدات( 22-5الشكل )يوضح
)في الطابق االول، في الطابق األخير، في الطابقين الثاني والثالث، وفي كل الطوابق( على اس تراتيجيات التحكم
تحكم سلبي، تحكم شبه إيجابي(، وباستخدام سجل زلزال السنترو.)بدون تحكم،
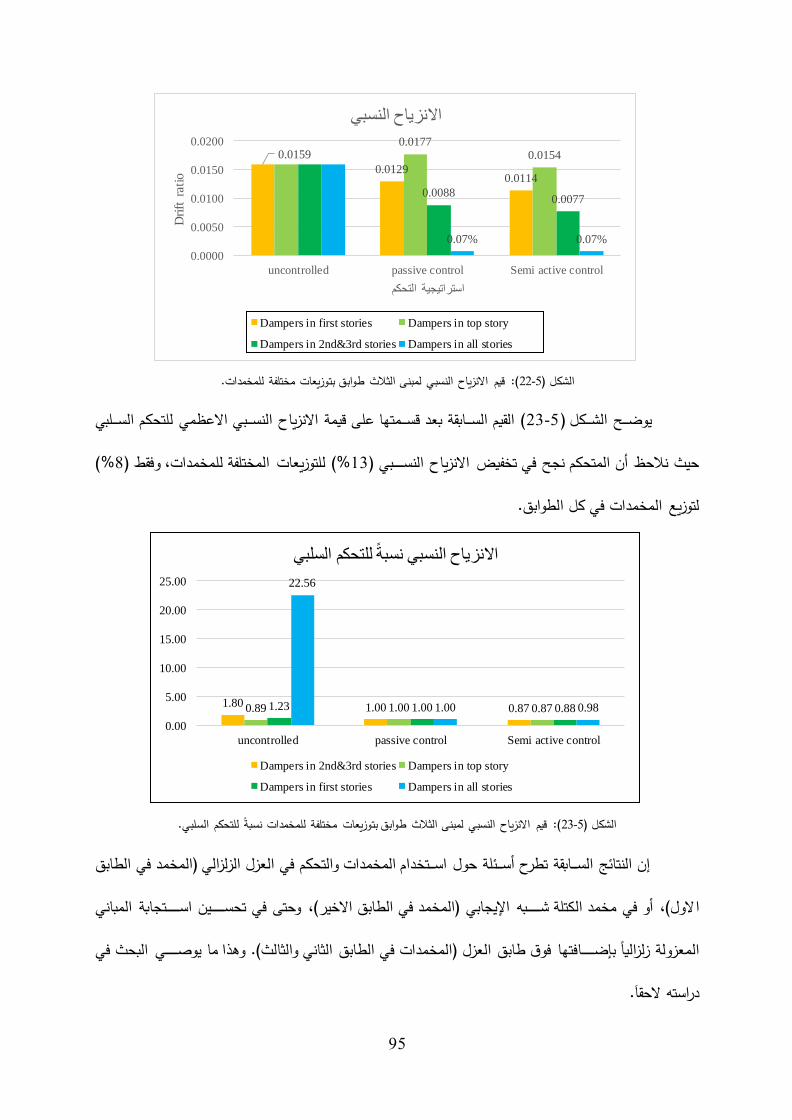
95
.(: قيم االنزياي النسبي لمبنى الثالث طوابق بتوزيعات مختلفة للمخمدات22-5الشكل )
( القيم الس ابقة بعد قس متها على قيمة االنزياي النس بي االعظمي للتحكم الس لبي 23-5الش كل )يوض ح
( %8( للتوزيعات المختلفة للمخمدات، وفقط )%13حيث نالحظ أن المتحكم نجح في تخفيض االنزياي النس بي )
لطوابق.لتوزيع المخمدات في كل ا
(: قيم االنزياي النسبي لمبنى الثالث طوابق بتوزيعات مختلفة للمخمدات نسبًة للتحكم السلبي.23-5الشكل )
إن النتائج الس ابقة تطري أس ئلة حول اس تخدام المخمدات والتحكم في العزل الزلزالي )المخمد في الطابق
الول(، أو في مخمد الكتلة ش به اإليجابي )المخمد في الطابق االخير(، وحتى في تحس ين اس تجابة المباني ا
فو طابق العزل )المخمدات في الطابق الثاني والثالث(. وهذا ما يوص ي البحث في بإض افتهاالمعزولة زلزاليًا
دراسته الحقَا.
0.0159
0.01290.0114
0.01770.0154
0.00880.0077
0.07% 0.07%
0.0000
0.0050
0.0100
0.0150
0.0200
uncontrolled passive control Semi active control
Dri
ft r
ati
o
استراتيجية التحكم
االنزياح النسبي
Dampers in first stories Dampers in top story
Dampers in 2nd&3rd stories Dampers in all stories
1.80 1.00 0.870.89 1.00 0.871.23 1.00 0.88
22.56
1.00 0.98
0.00
5.00
10.00
15.00
20.00
25.00
uncontrolled passive control Semi active control
االنزياح النسبي نسبةً للتحكم السلبي
Dampers in 2nd&3rd stories Dampers in top story
Dampers in first stories Dampers in all stories
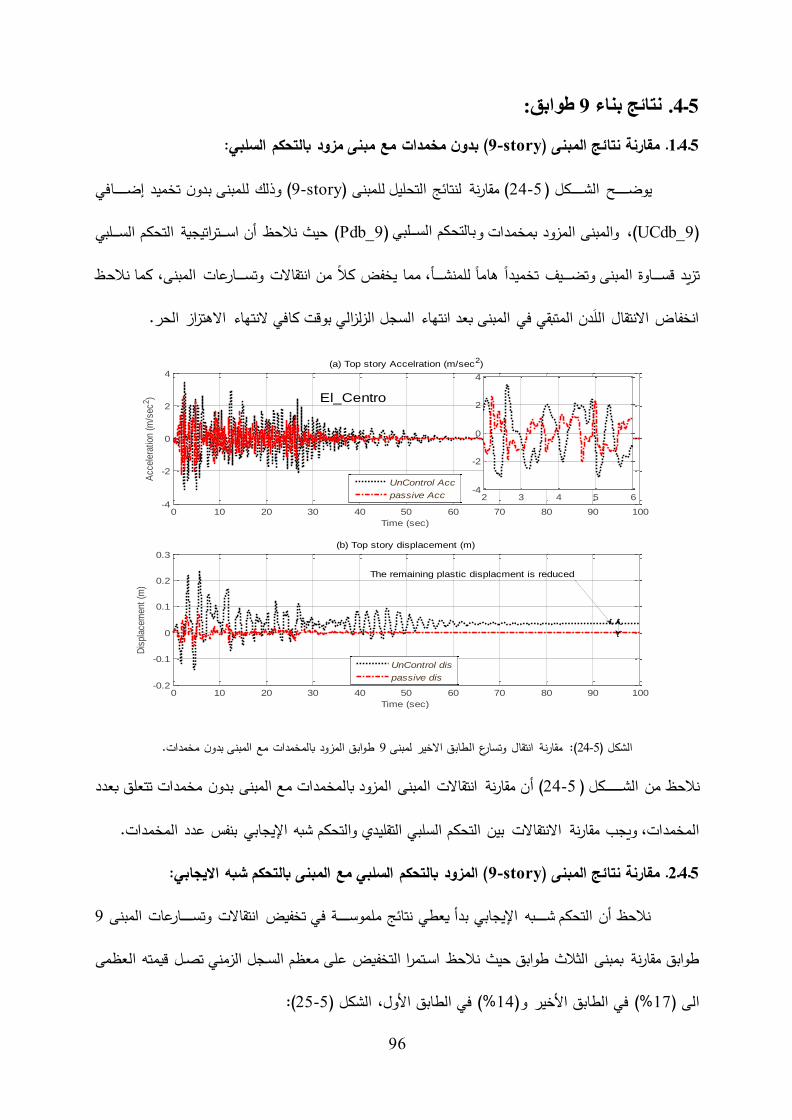
96
طوابق: 9نتائج بناء .4ـ5
( بدون مخمدات مع مبنى مزود بالتحكم السلبي:story-9مبنى )نتائج المقارنة .1ـ4ـ5
( وذلك للمبنى بدون تخميد إض افيstory-9( مقارنة لنتائج التحليل للمبنى )24-5الش كل ) يوض ح
(UCdb_9)التحكم السدددلبيبات و، والمبنى المزود بمخمد (Pdb_9 حيث نالحظ أن اس تراتيجية التحكم الس لبي )
ا نالحظ ، كمتض يف تخميدًا هامًا للمنش أ، مما يخفض كاًل من انتقاالت وتس ارعات المبنىتزيد قس اوة المبنى و
.الحر زانخفاض االنتقال الَلدن المتبقي في المبنى بعد انتهاء السجل الزلزالي بوقت كافي النتهاء االهتزا
طوابق المزود بالمخمدات مع المبنى بدون مخمدات. 9مقارنة انتقال وتسارع الطابق االخير لمبنى (:24-5الشكل )
تتعلق بعدد ن مقارنة انتقاالت المبنى المزود بالمخمدات مع المبنى بدون مخمدات أ( 24-5الش كل )نالحظ من
بين التحكم السلبي التقليدي والتحكم شبه اإليجابي بنفس عدد المخمدات. تاالنتقاالويجب مقارنة المخمدات،
( المزود بالتحكم السلبي مع المبنى بالتحكم شبه االيجابي:story-9مبنى )النتائج مقارنة .2ـ4ـ5
9نالحظ أن التحكم ش به اإليجابي بدأ يعطي نتائج ملموس ة في تخفيض انتقاالت وتس ارعات المبنى
ته العظمىل قيميض على معظم الس جل الزمني تص طوابق مقارنة بمبنى الثالث طوابق حيث نالحظ اس تمرا التخف
(:25-5الشكل ) ،( في الطابق األول%14في الطابق األخير و) (%17ى )ال
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
El_Centro
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (m
/sec
2 )
UnControl Acc
passive Acc
0 10 20 30 40 50 60 70 80 90 100-0.2
-0.1
0
0.1
0.2
0.3(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
UnControl dis
passive dis
2 3 4 5 6-4
-2
0
2
4
The remaining plastic displacment is reduced
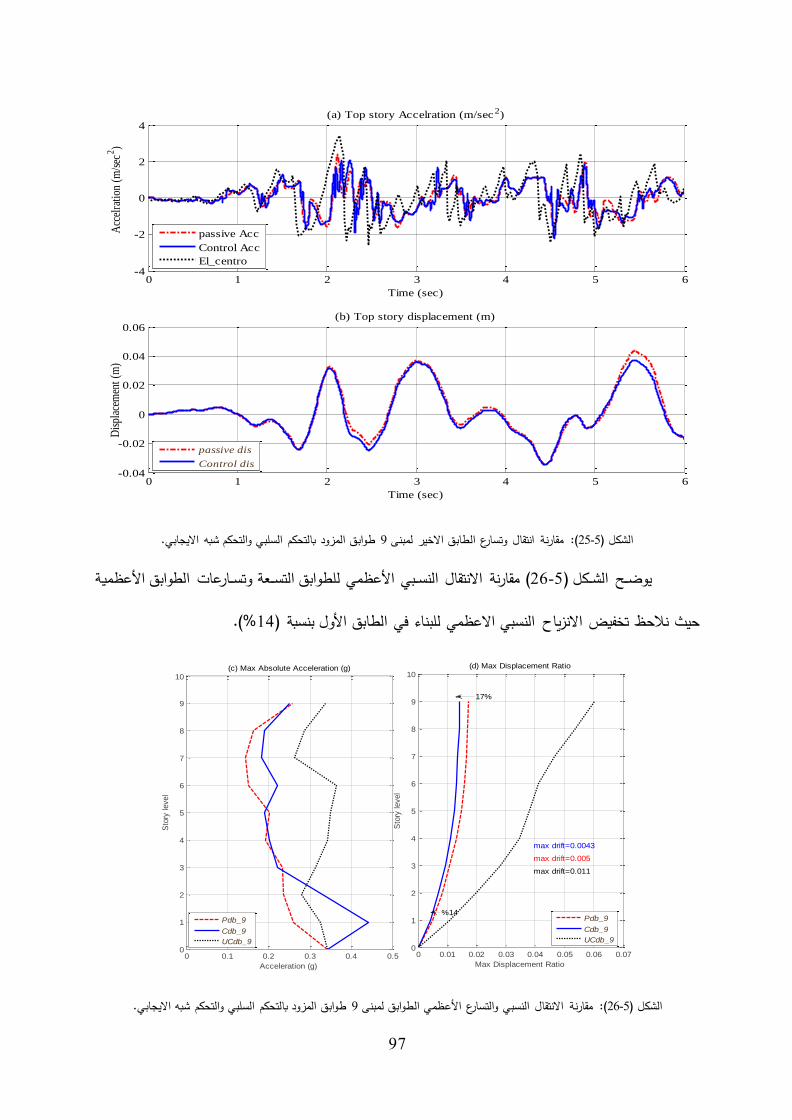
97
طوابق المزود بالتحكم السلبي والتحكم شبه االيجابي. 9لمبنى مقارنة انتقال وتسارع الطابق االخير (:25-5الشكل )
ية عظموابق التس عة وتس ارعات الطوابق األلطالنس بي األعظمي ل االنتقال( مقارنة 26-5الش كل )يوض ح
(.%14النسبي االعظمي للبناء في الطابق األول بنسبة ) ينزيااالحيث نالحظ تخفيض
طوابق المزود بالتحكم السلبي والتحكم شبه االيجابي. 9والتسارع األعظمي الطوابق لمبنى النسبي االنتقالمقارنة (:26-5الشكل )
0 1 2 3 4 5 6-4
-2
0
2
4(a) Top story Accelration (m/sec2)
Time (sec)
Acc
elra
tion
(m
/sec
2 )
0 1 2 3 4 5 6-0.04
-0.02
0
0.02
0.04
0.06(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
passive dis
Control dis
passive Acc
Control Acc
El_centro
0 0.1 0.2 0.3 0.4 0.50
1
2
3
4
5
6
7
8
9
10(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry level
Pdb_9
Cdb_9
UCdb_9
0 0.01 0.02 0.03 0.04 0.05 0.06 0.070
1
2
3
4
5
6
7
8
9
10(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry level
Pdb_9
Cdb_9
UCdb_9
max drift=0.0043
max drift=0.005
max drift=0.011
17%
%14

98
( حيث نالحظ قدرة المتحكم ∞H( نتائج متحكم )29-5الشكل )( و 28-5الشكل )( و 27-5الشكل )توضح االشكال:
ات وسجالت زلزالية مختلفة.على شدّ األداء الجيد()قدرته على على تخفيض استجابة االنتقال ومناعته
طوابق على استراتيجيات التحكم باستخدام هاشينوهي. 9النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:27-5الشكل )
0 1 2 3 4 5 6 7 8 9 10
-2
-1
0
1
2
(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
passive Acc
Control Acc
0 1 2 3 4 5 6 7 8 9 10
-0.05
0
0.05
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0 0.1 0.2 0.30
1
2
3
4
5
6
7
8
9
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_9
Cdb_9
UCdb_9
0 0.02 0.04 0.060
1
2
3
4
5
6
7
8
9
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_9
Cdb_9
UCdb_9
max Drift=0.004
max Drift=0.004
max Drift=0.010
6%
HACHINHE
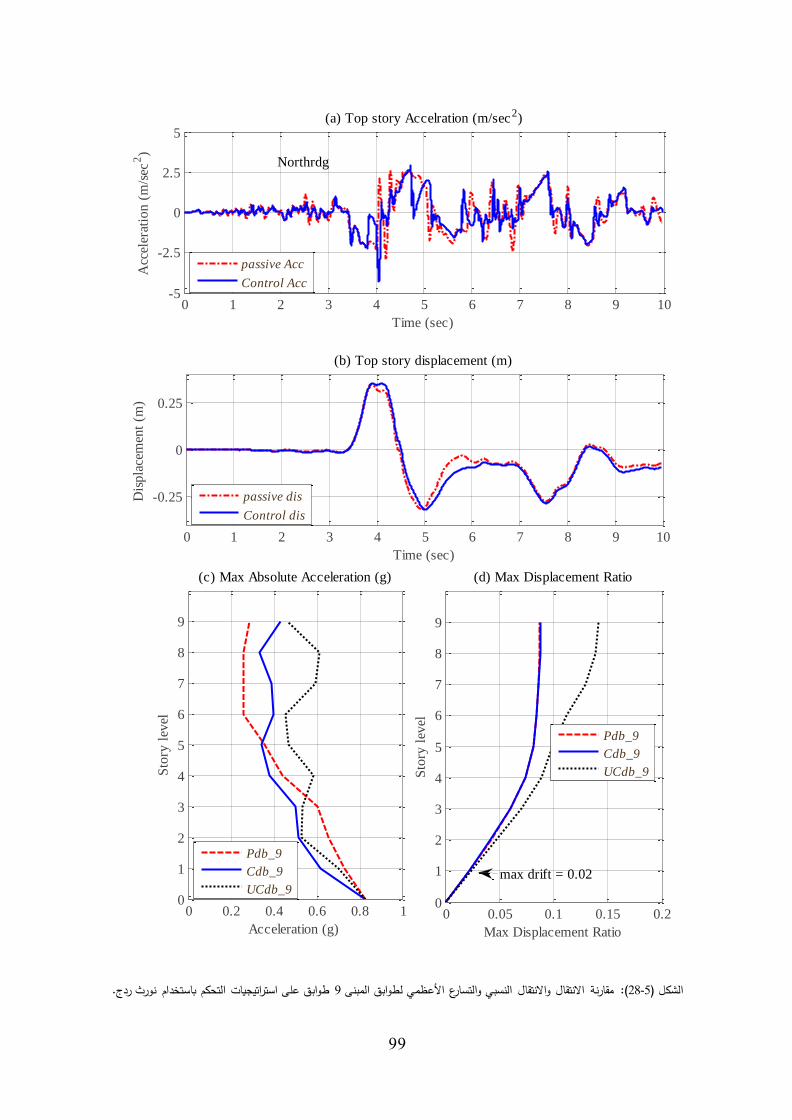
99
طوابق على استراتيجيات التحكم باستخدام نورث رد . 9النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:28-5الشكل )
0 1 2 3 4 5 6 7 8 9 10-5
-2.5
0
2.5
5(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
passive Acc
Control Acc
0 1 2 3 4 5 6 7 8 9 10
-0.25
0
0.25
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7
8
9
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_9
Cdb_9
UCdb_9
0 0.05 0.1 0.15 0.20
1
2
3
4
5
6
7
8
9
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_9
Cdb_9
UCdb_9
max drift = 0.02
Northrdg

100
طوابق على استراتيجيات التحكم باستخدام كوبي. 9النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:29-5الشكل )
5 6 7 8 9 10 11 12 13 14 15-5
-2.5
0
2.5
5(a) Top story Accelration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
passive Acc
Control Acc
5 6 7 8 9 10 11 12 13 14 15-0.5
-0.25
0
0.25
0.5(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7
8
9
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_9
Cdb_9
UCdb_9
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
1
2
3
4
5
6
7
8
9
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_9
Cdb_9
UCdb_9
max drift =0.01
Kobe

101
تلفة وزالزل التحليل تحكم مخ تاس تراتيجياطوابق باس تخدام 9( نتائج انتقاالت طوابق مبنى 7-5الجدول )يوض ح
العشرة حيث تم معايرة المتحكم من أجل زلزال السنترو وتجربته على الزالزل المتبقية لدراسة مناعته.
تحكم مختلفة تاستراتيجياطوابق باستخدام 9نتائج انتقاالت طوابق مبنى :(7-5الجدول )
Story Displacment (mm) D_S1 D_S2 D_S3 D_S4 D_S5 D_S6 D_S7 D_S8 D_S9
UCb_9_0.5 ElCentro 32 57 79 100 113 123 133 154 175
UCb_9_1.0 ElCentro 43 79 112 138 151 163 185 214 238
UCb_9_1.5 ElCentro 51 87 112 138 158 172 183 203 231
UCb_9_0.5 Hachinohe 29 48 65 82 95 105 127 148 163
UCb_9_1.0 Hachinohe 39 69 101 134 160 182 207 238 267
UCb_9_1.5 Hachinohe 46 89 131 168 195 231 267 318 359
UCb_9_0.5 Northridg 47 86 121 153 172 185 205 235 250
UCb_9_1.0 Northridg 95 188 278 351 394 445 511 550 561
UCb_9_0.5 Kobe 26 49 73 93 107 114 115 112 113
UCb_9_1.0 Kobe 48 93 137 176 205 224 235 243 249
Pdb_9_0.5 ElCentro 6 11 15 18 21 23 24 25 26
Pdb_9_1.0 ElCentro 20 33 43 53 59 63 66 68 69
Pdb_9_1.5 ElCentro 34 59 79 98 111 119 124 127 128
Pdb_9_0.5 Hachinohe 6 10 13 16 19 21 23 24 24
Pdb_9_1.0 Hachinohe 17 29 39 48 54 57 59 60 61
Pdb_9_1.5 Hachinohe 30 50 68 87 101 111 117 120 121
Pdb_9_0.5 Northridg 40 68 91 110 122 129 139 143 144
Pdb_9_1.0 Northridg 88 168 241 295 322 333 341 345 346
Pdb_9_0.5 Kobe 15 26 35 44 52 59 65 70 74
Pdb_9_1.0 Kobe 31 57 82 103 120 135 150 163 175
Cdb_9_0.5 ElCentro 6 10 13 16 18 20 20 21 22
Cdb_9_1.0 ElCentro 17 28 37 45 49 52 55 56 57
Cdb_9_1.5 ElCentro 33 58 79 98 112 120 125 125 127
Cdb_9_0.5 Hachinohe 6 10 13 17 20 22 24 25 26
Cdb_9_1.0 Hachinohe 17 28 38 47 53 55 57 58 58
Cdb_9_1.5 Hachinohe 28 47 64 81 94 103 108 110 109
Cdb_9_0.5 Northridg 39 68 91 109 122 129 134 137 138
Cdb_9_1.0 Northridg 88 168 241 296 323 334 343 348 350
Cdb_9_0.5 Kobe 17 30 41 50 58 65 70 74 77
Cdb_9_1.0 Kobe 34 62 86 107 125 140 153 165 177
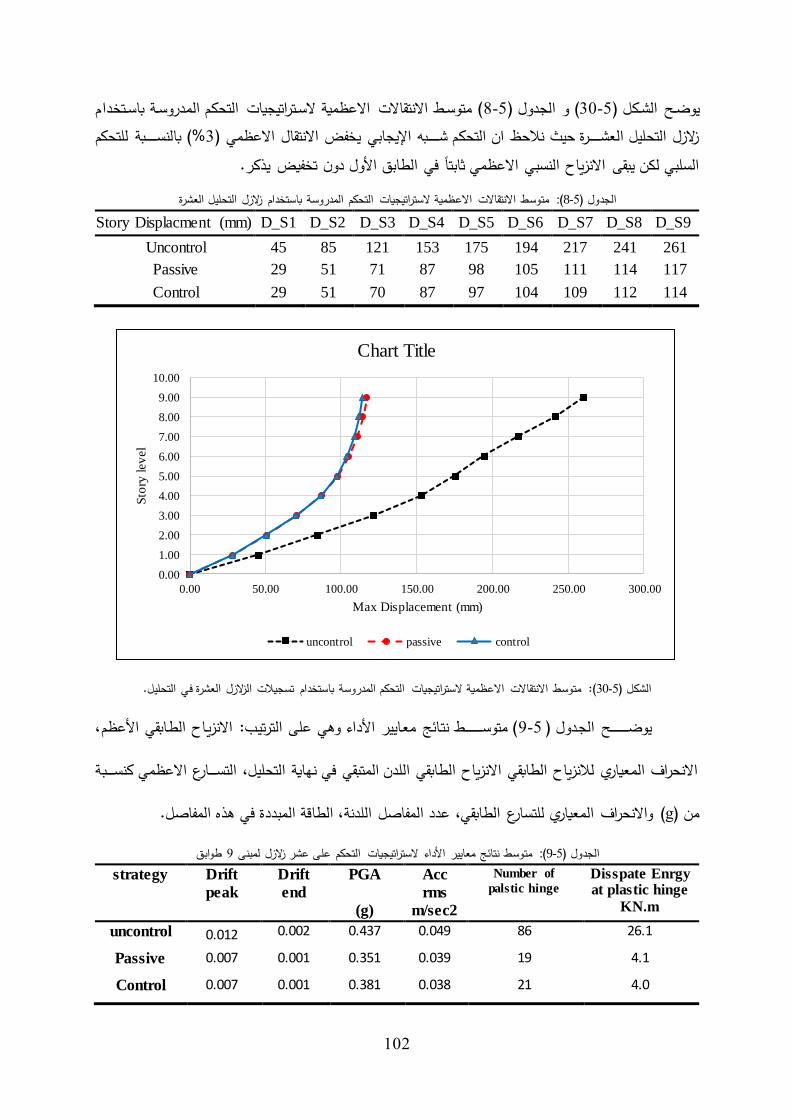
102
( متوس ط االنتقاالت االعظمية الس تراتيجيات التحكم المدروس ة باس تخدام 8-5الجدول )( و 30-5الش كل )يوض ح ( بالنس بة للتحكم %3زالزل التحليل العش رة حيث نالحظ ان التحكم ش به اإليجابي يخفض االنتقال االعظمي )
.يذكر تخفيضدون ي االعظمي ثابتًا في الطابق األول السلبي لكن يبقى االنزياي النسب متوسط االنتقاالت االعظمية الستراتيجيات التحكم المدروسة باستخدام زالزل التحليل العشرة :(8-5الجدول )
Story Displacment (mm) D_S1 D_S2 D_S3 D_S4 D_S5 D_S6 D_S7 D_S8 D_S9
Uncontrol 45 85 121 153 175 194 217 241 261
Passive 29 51 71 87 98 105 111 114 117
Control 29 51 70 87 97 104 109 112 114
في التحليل. زالزل العشرةال تسجيالت متوسط االنتقاالت االعظمية الستراتيجيات التحكم المدروسة باستخدام (:30-5الشكل )
( متوس ط نت ائج مع ايير األداء وهي على الترتي ب: االنزي اي الط ابقي األعظم، 9-5الج دول )يوض ح
االنحراف المعياري لالنزياي الطابقي االنزياي الطابقي اللدن المتبقي في نهاية التحليل، التس ارع االعظمي كنس بة
، الطاقة المبددة في هذه المفاصل.اللدنةالمعياري للتسارع الطابقي، عدد المفاصل ( واالنحرافgمن )
طوابق 9متوسط نتائج معايير األداء الستراتيجيات التحكم على عشر زالزل لمبنى :(9-5الجدول )
strategy Drift
peak
Drift
end
PGA
(g)
Acc
rms
m/sec2
Number of
palstic hinge Disspate Enrgy at plastic hinge
KN.m
uncontrol 0.012 0.002 0.437 0.049 86 26.1
Passive 0.007 0.001 0.351 0.039 19 4.1
Control 0.007 0.001 0.381 0.038 21 4.0
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
10.00
0.00 50.00 100.00 150.00 200.00 250.00 300.00
Sto
ry lev
el
Max Displacement (mm)
Chart Title
uncontrol passive control
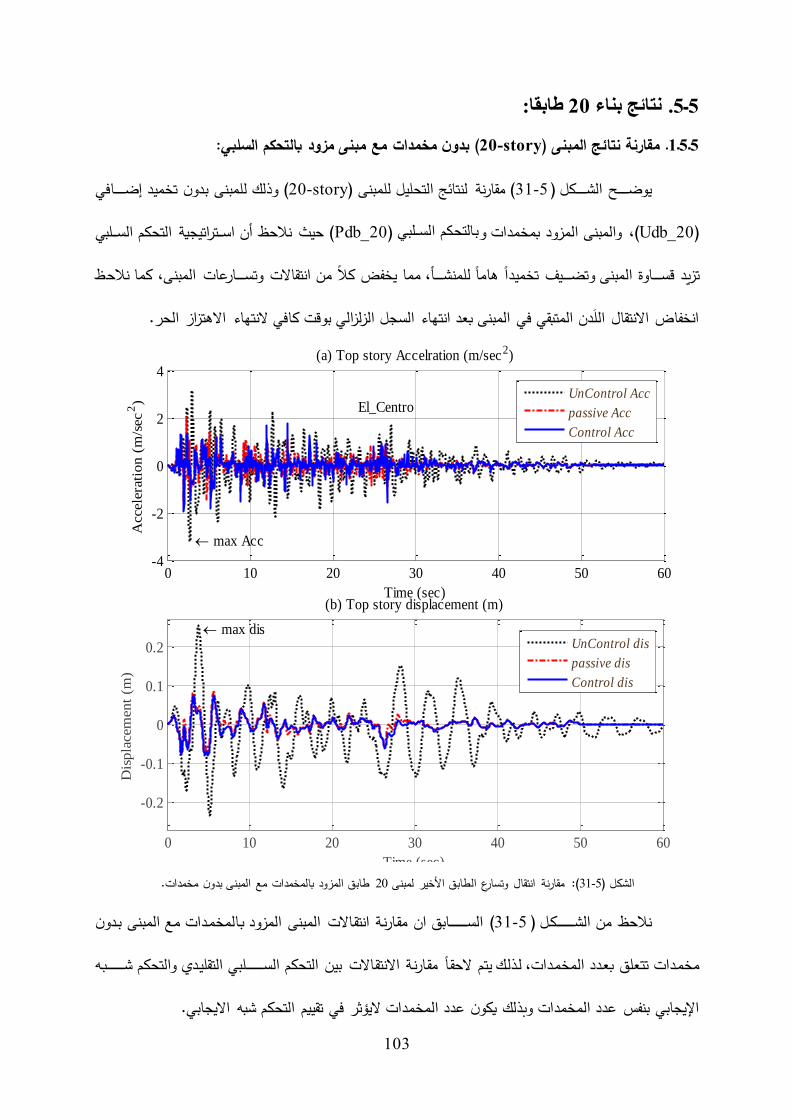
103
طابقا: 20نتائج بناء .5ـ5
بدون مخمدات مع مبنى مزود بالتحكم السلبي:( story-20مبنى )نتائج المقارنة .1ـ5ـ5
( وذلك للمبنى بدون تخميد إض افيstory-20( مقارنة لنتائج التحليل للمبنى )31-5الش كل ) يوض ح
(Udb_20)التحكم السددلبيب، والمبنى المزود بمخمدات و (Pdb_20 حيث نالحظ أن اس تراتيجية التحكم الس لبي )
ا نالحظ ، كمتض يف تخميدًا هامًا للمنش أ، مما يخفض كاًل من انتقاالت وتس ارعات المبنىتزيد قس اوة المبنى و
.رحانخفاض االنتقال الَلدن المتبقي في المبنى بعد انتهاء السجل الزلزالي بوقت كافي النتهاء االهتزاز ال
طابق المزود بالمخمدات مع المبنى بدون مخمدات. 20مقارنة انتقال وتسارع الطابق األخير لمبنى (:31-5الشكل )
الس ابق ان مق ارن ة انتق االت المبنى المزود ب المخم دات مع المبنى ب دون ( 31-5الش ك ل )من نالحظ
بين التحكم الس لبي التقلي دي والتحكم ش ب ه تاالنتق االمق ارن ة ل ذل ك يتم الحق اً تتعلق بع دد المخم دات،مخم دات
.وبذلك يكون عدد المخمدات الي ثر في تقييم التحكم شبه االيجابي اتاإليجابي بنفس عدد المخمد
0 10 20 30 40 50 60-4
-2
0
2
4
max Acc
(a) Top story Accelration (m/sec2)
Time (sec)
Accele
rati
on (
m/s
ec
2)
UnControl Acc
passive Acc
Control Acc
0 10 20 30 40 50 60
-0.2
-0.1
0
0.1
0.2
max dis
El_Centro
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
UnControl dis
passive dis
Control dis
El_Centro
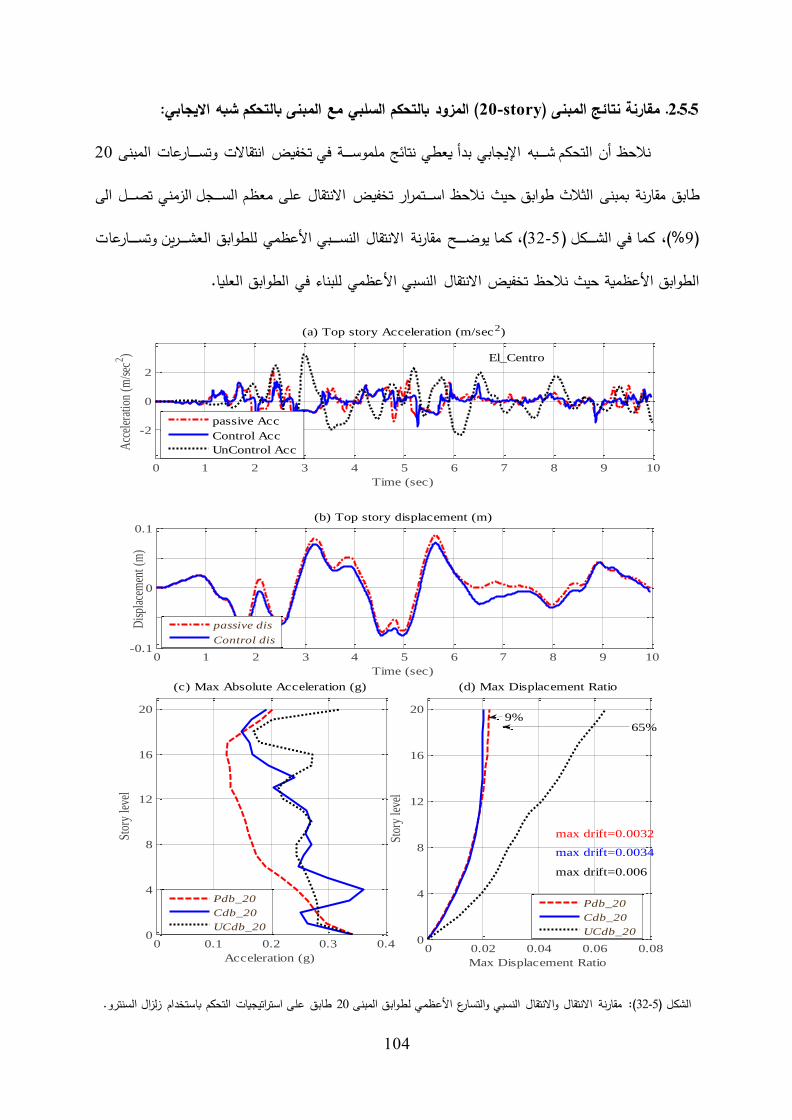
104
( المزود بالتحكم السلبي مع المبنى بالتحكم شبه االيجابي:story-20مبنى )نتائج المقارنة .2ـ5ـ5
20نالحظ أن التحكم ش به اإليجابي بدأ يعطي نتائج ملموس ة في تخفيض انتقاالت وتس ارعات المبنى
على معظم الس جل الزمني تص ل الىاالنتقال تخفيض رالثالث طوابق حيث نالحظ اس تمرامقارنة بمبنى طابق
ت وتس ارعا عش رينوابق اللطالنس بي األعظمي ل االنتقالمقارنة يوض ح (، كما32-5الش كل )كما في (، 9%)
.العليا ابقو عظمي للبناء في الطالنسبي األ االنتقالنالحظ تخفيض حيثعظمية الطوابق األ
السنترو.زلزال على استراتيجيات التحكم باستخدام طابق 20النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:32-5الشكل )
0 1 2 3 4 5 6 7 8 9 10
-2
0
2
El_Centro
(a) Top story Acceleration (m/sec2)
Time (sec)
Acc
eler
atio
n (m
/sec
2 )
0 1 2 3 4 5 6 7 8 9 10-0.1
0
0.1(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
passive dis
Control dis
0 0.1 0.2 0.3 0.40
4
8
12
16
20
(c) Max Absolute Acceleration (g)
Acceleration (g)
Stor
y le
vel
Pdb_20
Cdb_20
UCdb_20
0 0.02 0.04 0.06 0.080
4
8
12
16
20
(d) Max Displacement Ratio
Max Displacement Ratio
Stor
y le
vel
Pdb_20
Cdb_20
UCdb_20
passive Acc
Control Acc
UnControl Acc
max drift=0.0032
max drift=0.0034
max drift=0.006
9%65%
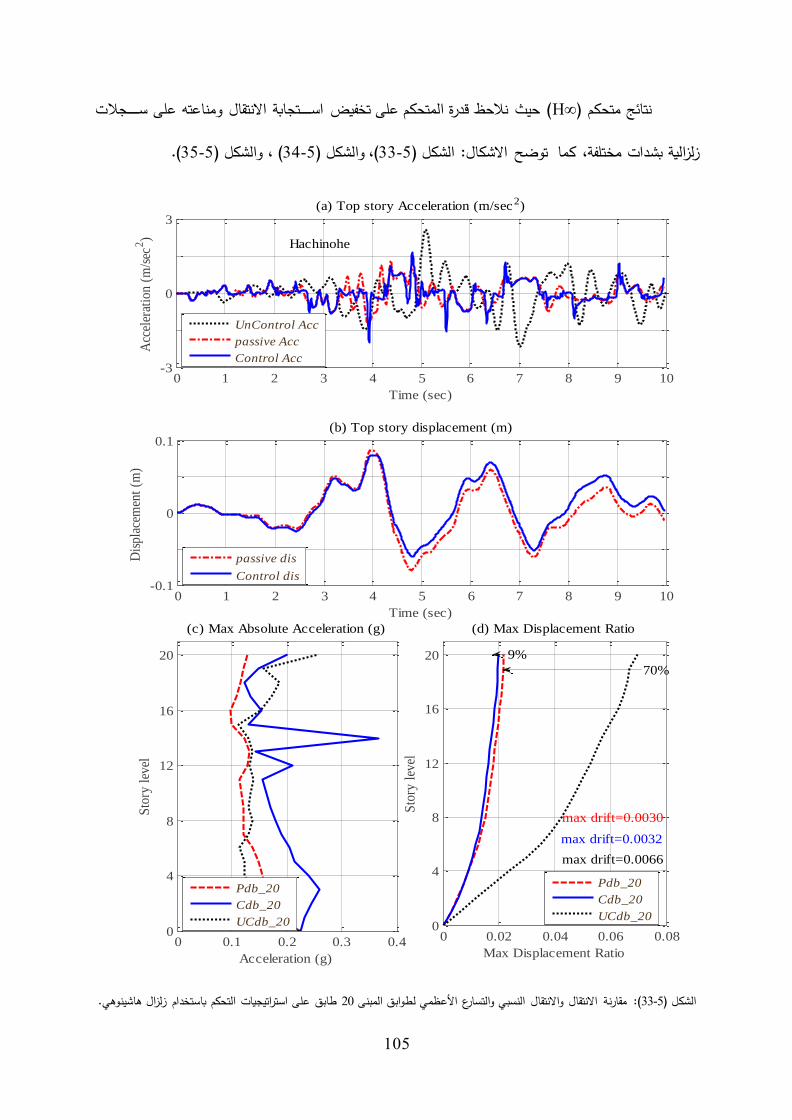
105
( حيث نالحظ قدرة المتحكم على تخفيض اس تجابة االنتقال ومناعته على س جالت ∞Hنتائج متحكم )
(.35-5الشكل )، و ( 34-5الشكل )و ،(33-5الشكل )توضح االشكال: زلزالية بشدات مختلفة، كما
هاشينوهي. زلزال استراتيجيات التحكم باستخدام علىطابق 20 النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:33-5الشكل )
0 1 2 3 4 5 6 7 8 9 10-3
0
3(a) Top story Acceleration (m/sec2)
Time (sec)
Acc
eler
atio
n (m
/sec
2)
UnControl Acc
passive Acc
Control Acc
0 1 2 3 4 5 6 7 8 9 10-0.1
0
0.1(b) Top story displacement (m)
Time (sec)
Dis
plac
emen
t (m
)
passive dis
Control dis
0 0.1 0.2 0.3 0.40
4
8
12
16
20
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_20
Cdb_20
UCdb_20
0 0.02 0.04 0.06 0.080
4
8
12
16
20
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_20
Cdb_20
UCdb_20
70%
Hachinohe
9%
max drift=0.0066
max drift=0.0030
max drift=0.0032

106
. د ينورث ر زلزال على استراتيجيات التحكم باستخدامطابق 20النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:34-5الشكل )
0 1 2 3 4 5 6 7 8 9 10
-2
0
2
Northrdg
(a) Top story Acceleration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
UnControl Acc
passive Acc
Control Acc
0 1 2 3 4 5 6 7 8 9 10
0
0.5
(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0 0.2 0.4 0.6 0.80
4
8
12
16
20
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_20
Cdb_20
UCdb_20
0 0.05 0.1 0.15 0.20
4
8
12
16
20
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_20
Cdb_20
UCdb_20
-6%
34%
max drift=0.019
max drift=0.018
max drift=0.020

107
كوبي.زلزال طوابق على استراتيجيات التحكم باستخدام 20النسبي والتسارع األعظمي لطوابق المبنى االنتقالمقارنة االنتقال و (:35-5الشكل )
4 6 8 10 12 14 16-4
-2
0
2
4
Kobe
(a) Top story Acceleration (m/sec2)
Time (sec)
Acc
eler
atio
n (
m/s
ec2)
UnControl Acc
passive Acc
Control Acc
4 6 8 10 12 14 16-0.3
0
0.3(b) Top story displacement (m)
Time (sec)
Dis
pla
cem
ent
(m)
passive dis
Control dis
0 0.2 0.4 0.6 0.8 0.90
4
8
12
16
20
(c) Max Absolute Acceleration (g)
Acceleration (g)
Sto
ry l
evel
Pdb_20
Cdb_20
UnCdb_3
0 0.02 0.04 0.06 0.080
4
8
12
16
20
(d) Max Displacement Ratio
Max Displacement Ratio
Sto
ry l
evel
Pdb_20
Cdb_20
UnCdb_3
7%
25%
max drift=0.0078
max drift=0.0084
max drift=0.012
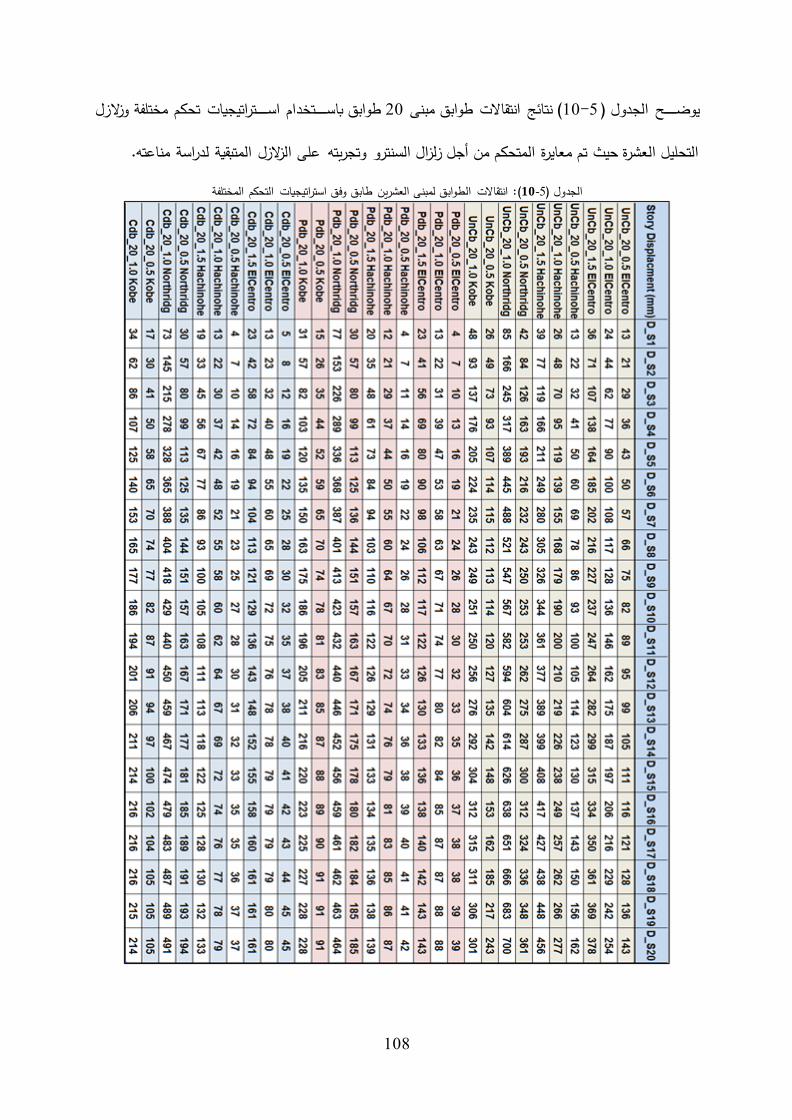
108
تحكم مختلفة وزالزل تاس تراتيجياطوابق باس تخدام 20( نتائج انتقاالت طوابق مبنى 10-5الجدول ) يوض ح
ناعته.الزالزل المتبقية لدراسة م التحليل العشرة حيث تم معايرة المتحكم من أجل زلزال السنترو وتجربته على
: انتقاالت الطوابق لمبنى العشرين طابق وفق استراتيجيات التحكم المختلفة(10-5الجدول )
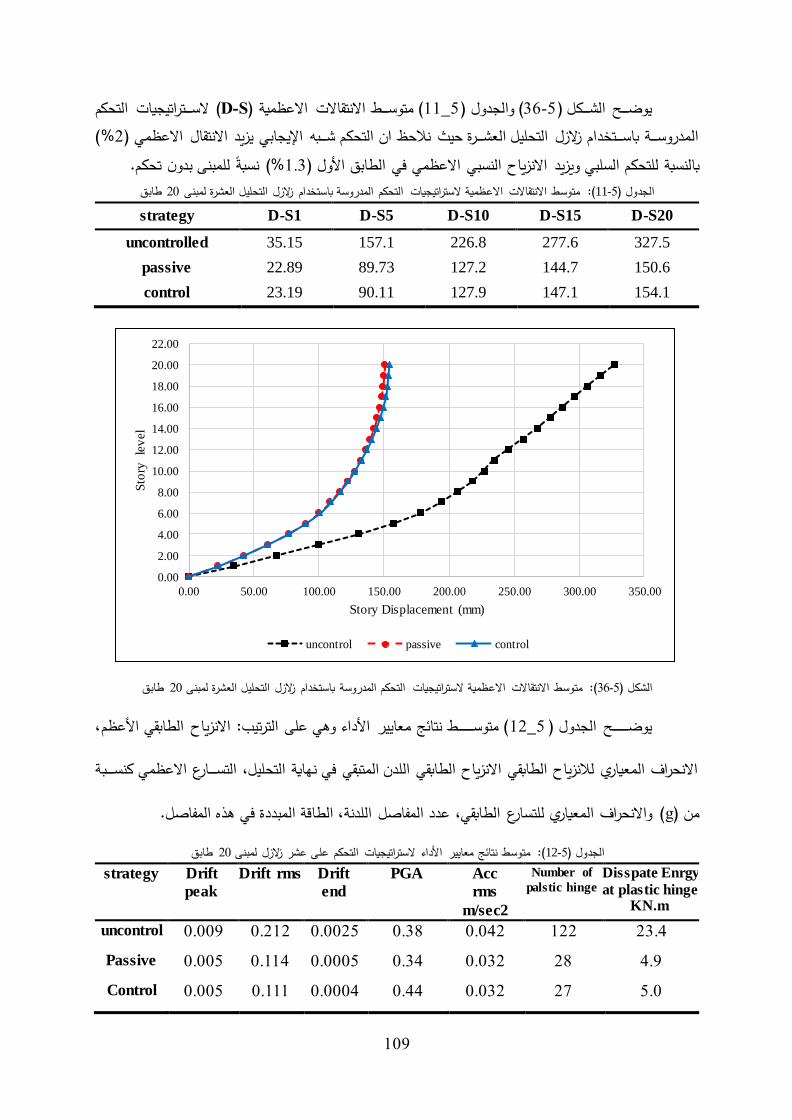
109
الس تراتيجيات التحكم ( D-S)( متوس ط االنتقاالت االعظمية 11_5الجدول )( و 36-5الش كل )يوض ح ( %2االنتقال االعظمي ) يزيد المدروس ة باس تخدام زالزل التحليل العش رة حيث نالحظ ان التحكم ش به اإليجابي
( نسبًة للمبنى بدون تحكم.%1.3في الطابق األول ) ويزيد االنزياي النسبي االعظميبالنسبة للتحكم السلبي طابق 20متوسط االنتقاالت االعظمية الستراتيجيات التحكم المدروسة باستخدام زالزل التحليل العشرة لمبنى (:11-5الجدول )
strategy D-S1 D-S5 D-S10 D-S15 D-S20
uncontrolled 35.15 157.1 226.8 277.6 327.5
passive 22.89 89.73 127.2 144.7 150.6
control 23.19 90.11 127.9 147.1 154.1
طابق 20التحكم المدروسة باستخدام زالزل التحليل العشرة لمبنى متوسط االنتقاالت االعظمية الستراتيجيات (:36-5الشكل )
( متوس ط نتائج معايير األداء وهي على الترتيب: االنزياي الطابقي األعظم، 12_5الجدول )يوض ح
االنحراف المعياري لالنزياي الطابقي االنزياي الطابقي اللدن المتبقي في نهاية التحليل، التس ارع االعظمي كنس بة
، الطاقة المبددة في هذه المفاصل.اللدنة( واالنحراف المعياري للتسارع الطابقي، عدد المفاصل g) من
طابق 20متوسط نتائج معايير األداء الستراتيجيات التحكم على عشر زالزل لمبنى (: 12-5الجدول )
strategy Drift
peak
Drift rms Drift
end
PGA Acc
rms
m/sec2
Number of
palstic hinge Disspate Enrgy
at plastic hinge KN.m
uncontrol 0.009 0.212 0.0025 0.38 0.042 122 23.4
Passive 0.005 0.114 0.0005 0.34 0.032 28 4.9
Control 0.005 0.111 0.0004 0.44 0.032 27 5.0
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
18.00
20.00
22.00
0.00 50.00 100.00 150.00 200.00 250.00 300.00 350.00
Sto
ry
lev
el
Story Displacement (mm)
uncontrol passive control

110
باختالف االرتفاع: األبنيةمقارنة نتائج .6ـ5
على اس تراتيجيات طابقًا( 20طوابق و 9طوابق و 3تم في هذا الجزء مقارنة اس تجابة األبنية الثالثة )
التحكم الثالثة وذلك من أجل زلزال الس نترو وذلك الن التحكم معاير ومص مم من أجله والنتائج باس تخدامه هي
:(37-5)الشكل ، كما هو مبين في االد في المقارنة
طابقاً( على استراتيجيات التحكم باستخدام زلزال السنترو. 20طوابق و 9طوابق و 3األعظمي لألبنية ) االنتقالمقارنة (:37-5)الشكل
على ( ∞𝐻)به دف اظه ار م دى كف اءة المتحكم تم ايج اد النس ب ة بين االنتق ال االعظمي بوجود متحكم
في تخفيض االنتق ال االعظمي ( ∞𝐻) ان فع الي ةنى بوج دود متحكم س لبي، وعلي ه نج د باالنتق ال االعظمي للم
،%9عش رين طابق مبنى، ومن ال%12منها في المبنى ثالثة طوابق أكثر %17للمبنى من تس ع طوابق بنس بة
:(38-5)الشكل كما هو مبين في
طابقاً( منسوبًا للتحكم السلبي باستخدام زلزال السنترو. 20طوابق و 9طوابق و 3االعظمي لألبنية ) االنتقالمقارنة (: 38-5)الشكل
0.140
0.006 0.005
0.238
0.069 0.057
0.254
0.088 0.080
0.000
0.050
0.100
0.150
0.200
0.250
0.300
Uncontrol Passive H∞ Control ler
Ma
x D
isp
lace
men
t (m
)
control strategy
3-STORY 9-STORY 20-STORY
2535%
100% 88%348%
100% 83%287%
100% 91%
0%
500%
1000%
1500%
2000%
2500%
3000%
Uncontrol Passive H∞ Control ler
Ma
x d
is/p
ass
ive
Ma
x d
is
control strategy
3-STORY 9-STORY 20-STORY
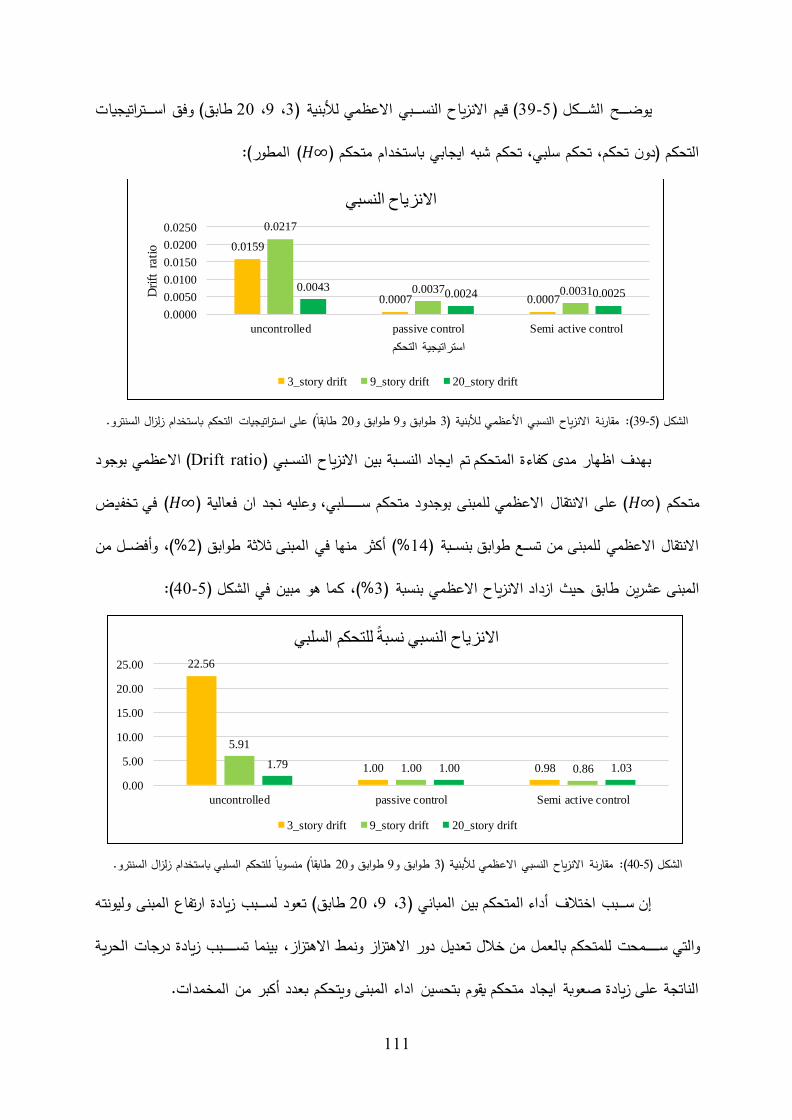
111
ق اس تراتيجيات طابق( وف 20، 9، 3( قيم االنزياي النس بي االعظمي لألبنية )39-5الش كل )يوض ح
(:( المطور∞𝐻)التحكم )دون تحكم، تحكم سلبي، تحكم شبه ايجابي باستخدام متحكم
طابقاً( على استراتيجيات التحكم باستخدام زلزال السنترو. 20طوابق و 9طوابق و 3النسبي األعظمي لألبنية ) االنزيايمقارنة (:39-5الشكل )
االعظمي بوجود (Drift ratioاالنزياي النس بي )بهدف اظهار مدى كفاءة المتحكم تم ايجاد النس بة بين
( في تخفيض ∞𝐻فعالية ) يه نجد انبوجدود متحكم س لبي، وعل( على االنتقال االعظمي للمبنى ∞𝐻متحكم )
من أفض ل و ،(%2)منها في المبنى ثالثة طوابق أكثر (%14)االنتقال االعظمي للمبنى من تس ع طوابق بنس بة
(:40-5)الشكل ، كما هو مبين في (%3حيث ازداد االنزياي االعظمي بنسبة ) المبنى عشرين طابق
طابقاً( منسوبًا للتحكم السلبي باستخدام زلزال السنترو. 20طوابق و 9طوابق و 3النسبي االعظمي لألبنية ) االنزيايمقارنة (: 40-5)الشكل
زيادة ارتفاع المبنى وليونته س ببطابق( تعود ل 20، 9، 3تالف أداء المتحكم بين المباني )إن س بب اخ
رية زيادة درجات الح ، بينما تس ببمن خالل تعديل دور االهتزاز ونمط االهتزاز س محت للمتحكم بالعملوالتي
أكبر من المخمدات.نى ويتحكم بعدد الناتجة على زيادة صعوبة ايجاد متحكم يقوم بتحسين اداء المب
0.0159
0.0007 0.0007
0.0217
0.0037 0.00310.00430.0024 0.0025
0.0000
0.0050
0.0100
0.0150
0.0200
0.0250
uncontrolled passive control Semi active control
Dri
ft r
ati
o
استراتيجية التحكم
االنزياح النسبي
3_story drift 9_story drift 20_story drift
22.56
1.00 0.98
5.91
1.00 0.861.79 1.00 1.03
0.00
5.00
10.00
15.00
20.00
25.00
uncontrolled passive control Semi active control
االنزياح النسبي نسبةً للتحكم السلبي
3_story drift 9_story drift 20_story drift
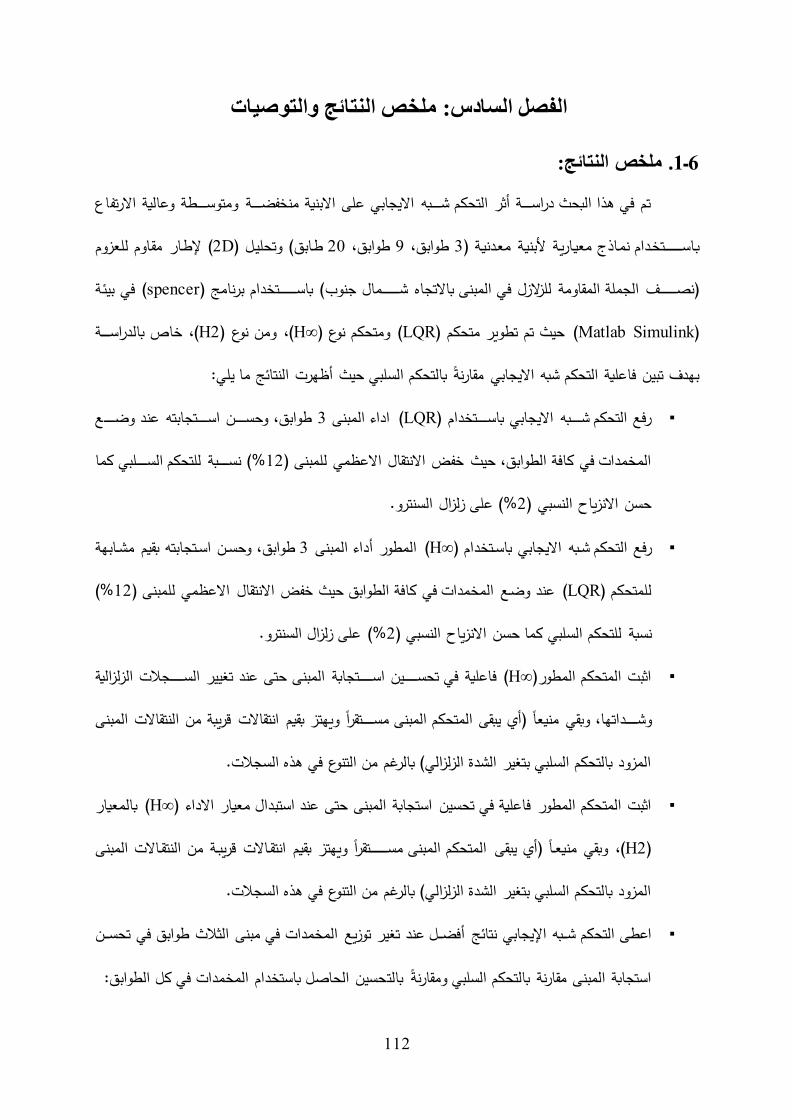
112
ملخص النتائج والتوصياتالفصل السادس:
ملخص النتائج: .1ـ6
تم في هذا البحث دراس ة أثر التحكم ش به االيجابي على االبنية منخفض ة ومتوس طة وعالية االرتفاع
مق اوم للعزوم إلط ار( 2Dط ابق( وتحلي ل ) 20طوابق، 9طوابق، 3مع دني ة ) ألبني ةب اس تخ دام نم اذ معي اري ة
( في بيئة spencer( باس تخدام برنامج )ش مال جنوب نص ف الجملة المقاومة للزالزل في المبنى باالتجاه)
(Matlab Simulink حيث تم تطوير متحكم )(LQR( ومتحكم نوع )H∞ و ،)نوع من(H2 ،) خاص بالدراس ة
:يما يلج بهدف تبين فاعلية التحكم شبه االيجابي مقارنًة بالتحكم السلبي حيث أظهرت النتائ
ع 3اداء المبنى (LQR)رفع التحكم ش به االيجابي باس تخدام ▪ طوابق، وحس ن اس تجابته عند وض
كما ( نس بة للتحكم الس لبي %12لمبنى )حيث خفض االنتقال االعظمي ل ،المخمدات في كافة الطوابق
( على زلزال السنترو.%2حسن االنزياي النسبي )
بقيم مش ابهة ، وحس ن اس تجابته طوابق 3مبنى داء الالمطور أ (∞H)باس تخدام التحكم ش به االيجابيرفع ▪
(%12)المخمدات في كافة الطوابق حيث خفض االنتقال االعظمي للمبنى عند وض ع ( LQRللمتحكم )
( على زلزال السنترو.%2كما حسن االنزياي النسبي ) للتحكم السلبينسبة
حتى عند تغيير الس جالت الزلزالية في تحس ين اس تجابة المبنى فاعلية (∞H)اثبت المتحكم المطور ▪
المبنى لنتقاالت اقريبة من انتقاالت يهتز بقيم أي يبقى المتحكم المبنى مس تقرًا و )وبقي منيعًا ، وش داتها
بالرغم من التنوع في هذه السجالت. (المزود بالتحكم السلبي بتغير الشدة الزلزالي
( بالمعيار ∞Hفاعلية في تحسين استجابة المبنى حتى عند استبدال معيار االداء )اثبت المتحكم المطور ▪
(H2 وبقي منيع ًا ،)( المبنى ق االت النتقريب ة من انتق االت يهتز بقيم أي يبقى المتحكم المبنى مس تقرًا و
بالرغم من التنوع في هذه السجالت. (المزود بالتحكم السلبي بتغير الشدة الزلزالي
في تحس ن طوابق الثالثفي مبنى عند تغير توزيع المخمدات أفض لكم ش به اإليجابي نتائج اعطى التح ▪
:حسين الحاصل باستخدام المخمدات في كل الطوابقتاستجابة المبنى مقارنة بالتحكم السلبي ومقارنًة بال
113
ابق انتقال الطخفض ول من المبنى ثالثة طوابق الطابق األمع تحكم سلبي في MRم المخمد ان استخدا ▪
ن في الطوابق لك وبقي االنزياي النسبي مشابه للمبنى بدون تحكم ،نسبًة للمبنى دون تحكم (%33) األخير
االنزياي النسبي ( نسبًة للتحكم السلبي، و %10للطابق االخير )االنتقال االعظمي تخفيضتم بينما العليا،
(.∞Hمع متحكم ) MRم المخمد استخداب( نسبًة للتحكم السلبي، وذلك %13) للبناءالكلي
.بالعزل الزلزاليان المسالة السابقة تشبه إضافة التحكم شبه اإليجابي على مبنى مزود –
ال خفض انتقلم ي من المبنى ثالثة طوابق خيرالطابق األمع تحكم س لبي في MRان اس تخدام المخمد ▪
تخفيض تم بينما ،بدون تحكم س بًة للمبنى( ن%60)االنزياي النس بي ، بل تس بب بزيادةالطابق األخير
اي االنزيتس بب بتخفيض ، و والمبنى ( نس بًة للتحكم الس لبي%13للطابق االخير )االنتقال االعظمي
اس تخدام ، وذلك ب( عن المبنى دون تحكم%40وبزيادة ) ( نس بًة للتحكم الس لبي%13للبناء )النس بي الكلي
(.∞Hمع متحكم ) MRالمخمد
Activeالس ابقة تش به إض افة التحكم ش به اإليجابي على مبنى مزود بمخمد الكتلة )ان المس الة –
mass damper.في الطابق االخير )
انتقال خفض ثالث من المبنى ثالثة طوابقالالثاني و الطابق مع تحكم سلبي في MRم المخمد ان استخدا ▪
للمبنى بدون نس بًة (%20)نس بي االنزياي ال خفضو نس بًة للمبنى دون تحكم، (%90) الطابق األخير
االنزياي النسبي ( نسبًة للتحكم السلبي، و %13للطابق االخير )االنتقال االعظمي تخفيضتم بينما ،تحكم
(.∞Hمع متحكم ) MRم المخمد استخدا( نسبًة للتحكم السلبي، وذلك ب%13) للبناءالكلي
.ول زلزالياً مبنى معز لطوابق العليا الان المسالة السابقة تشبه إضافة التحكم شبه اإليجابي على –
واالنزياي (%17)تخفيض االنتقال ( ∞Hباس تخدام المتحكم المطور )اس تطاع التحكم ش به اإليجابي ▪
لمبنى التسع طوابق مقارنًة بالتحكم السلبي. (%14)النسبي
لكن %9 تخفيض انتقال الطابق األخير( المطور ∞H)باض افة المتحكم ابياس تطاع التحكم ش به اإليج ▪
االنزياي النسبي لمبنى العشرين طابق مقارنًة بالتحكم السلبي. %3سبب زيادة
114
:العمل المستقبليالتوصيات و .2ـ6
يوصي البحث بدراسة كل من:
على بش كل أفض ل خطيه الالأثر إلدخال (ANSYS or ABQUSتحليل النموذ على برنامج ) ▪
.المختلفةاستجابة األبنية
اس تخدام المتحكم حيث لوحظ اثناء التجارب اختالف في التخفيض في أثردراس ة )س بكتوغرام( لدراس ة ▪
الزمن.
دراسة التحكم شبه اإليجابي على األبنية المعزولة زلزاليا في طابق العزل وفي باقي الطوابق. ▪
semi Active massاألبنية المزودة بمخمد الكتلة ش به اإليجابي )دراس ة التحكم ش به اإليجابي على ▪
damper).
115
المراجع:
[1]. Agrawal, A., Yang, J., and Schmitendorf, W. "Hybrid control of buildings using
nonlinear polynomial output feedback." Presented at American Control
Conference, 1998. Proceedings of the 1998.
[2]. Akbay, Z., and Aktan, H. M. "Intelligent energy dissipation devices." Presented
at Proc., 4th US Nat. Conf. On Earthquake Engrg.
[3]. Cheng, F. Y., Jiang, H., and Lou, K. (2010). Smart structures: innovative systems
for seismic response control: CRC Press.
[4]. Christenson, R., Bass, B., and Lin, Y. Z. (2007). "NEES Payload–August 6-7,
2007: Experimental Verification of Semiactive Control using Large-Scale
Magneto-Rheological (MR) Fluid Dampers".
[5]. Dowdell, D., and Cherry, S. "Semi-active friction dampers for seismic response
control of structures." Presented at Proc., Fifth US .Nat. Conf. on Earthquake
Engrg.
[6]. Dyke, S., and Spencer Jr, B. "Seismic response control using multiple MR
dampers." Presented at Proc. of the 3rd Intl. Workshop on Struct. Control.
[7]. Dyke, S., and Spencer Jr, B. "A comparison of semi-active control strategies for
the MR damper." Presented at Intelligent Information Systems, 1997. IIS'97.
Proceedings.
[8]. Dyke, S., Spencer Jr, B., Sain, M., and Carlson, J. "Experimental verification of
semi-active structural control strategies using acceleration feedback." Presented at
Proc. of the 3rd Intl. Conf. on Motion and Vibr. Control.
[9]. Dyke, S., Spencer Jr, B., Sain, M., and Carlson, J. (1996b). "Modeling and control
of magnetorheological dampers for seismic response reduction." Smart materials
and structures, 5(5), 565.
116
[10]. Dyke, S. J. (1996). Acceleration feedback control strategies for active and
semi-active control systems: modeling, algorithm development, and experimental
verification, University of Notre Dame.
[11]. earthquakes, L. o. (2014). "Lists of earthquakes"Lists of earthquakes.
City.
[12]. Feng, M. Q., Shinozuka, M., and Fujii, S. (1993). "Friction-controllable
sliding isolation system." Journal of Engineering Mechanics, 119(9), 1845-1864.
[13]. Friedman, A. J., and Dyke, S. J. (2012). Development and experimental
validation of a new control strategy considering device dynamics for large-scale
MR dampers using real-time hybrid simulation, Doctoral Dissertation.
[14]. Fujita, T., Shimazaki, M., Yutaka, H., Aizawa, S., Higashino, M., and
Haniuda, N. (1994). "Semiactive seismic isolation system using controllable
friction damper." Bulletin of earthquake resistant structure research center , 27, 21-
31.
[15]. Gavin, H. P. (2001). "Control of seismically excited vibration using
electrorheological materials and Lyapunov methods." Control Systems Technology,
IEEE Transactions on, 9(1), 27-36.
[16]. Gavin, H. P., Hanson, R. D., and Filisko, F. E. (1996). "Electrorheological
dampers, part I: analysis and design." Journal of Applied Mechanics, 63(3), 669-
675.
[17]. Gawronski, W. K. (2004). Advanced structural dynamics and active
control of structures: Springer.
[18]. Guide, M. U. s. (1998). "The mathworks." Inc., Natick, MA, 5, 333.
[19]. Hanson, R., and Filisko, F. (1996). "Electrorheological Dampers, Part II:
Testing and Modeling." Ann Arbor, 1050, 48109.

117
[20]. Hochrainer, M. (2005" .)Tuned liquid column damper for structural
control." Acta mechanica, 175(1-4), 57-76.
[21]. Hochrainer, M. J., and Ziegler, F. (2006). "Control of tall building
vibrations by sealed tuned liquid column dampers." Structural Control and Health
Monitoring, 13(6 ,)980-1002.
[22]. Housner, G. W., Bergman, L. A., Caughey, T., Chassiakos, A., Claus, R.,
Masri, S., Skelton, R., Soong, T., Spencer, B., and Yao, J. T. (1997). "Structural
control: past, present, and future." Journal of engineering mechanics, 123(9), 897-
971.
[23]. Jiang, Z. (2012). Increasing resilience in civil structures using smart
damping technology.
[24]. Kuehn, J., Song, G., and Sun, J. "Experimental verification of a non-
protruding intelligent stiffener for bridges (ISB)." Presented at Proceedings of the
International Post-SMiRT Conference Seminar on Seismic Isolation, Passive
Energy, Dissipation and Active Control of Vibrations of Structures.
[25]. Kurata, N., Kobori, T., Takahashi, M., Ishibashi, T., Niwa, N., Tagami, J.,
and Midorikawa, H. (2000). "Forced vibration test of a building with semi‐active
damper system." Earthquake engineering & structural dynamics , 29(5), 629-645.
[26]. Kurata, N., Kobori, T., Takahashi, M., Niwa, N., and Midorikawa, H.
(1999). "Actual seismic response controlled building with semi‐active damper
system." Earthquake engineering & structural dynamics , 28(11), 1427-1447.
[27]. Kurino, H., and Kobori, T. "Semi-active structural response control by
optimizing the force–deformation loop of variable damper." Presented at
Proceedings Second World Conference on Structural Control .
[28]. Leitmann, G., and Reithmeier, E. (1993). "Semiactive control of a
vibrating system by means of electrorheological fluids." Dynamics and Control,
3(1), 7-33.

118
[29]. McClamroch, N. H., and Gavin, H. "Closed loop structural control using
electrorheological dampers." Presented at American Control Conference,
Proceedings of the 1995.
[30]. Myrtle, R. C., Masri, S. F., Nigbor, R. L., and Caffrey, J. P. (2005).
"Classification and prioritization of essential systems in hospitals under extreme
events ".Earthquake Spectra, 21(3), 779-802.
[31]. Nagarajaiah, S., and Mate, D. "Semi-active control of continuously
variable stiffness system." Presented at Proceedings of the Second World
Conference on Structural Control.
[32]. Neff Patten, W., Sun, J., Li, G., Kuehn, J . , and Song, G. (1999). "Field test
of an intelligent stiffener for bridges at the I‐35 Walnut Creek bridge."
Earthquake engineering & structural dynamics, 28(2), 109-126.
[33]. Ogata, K., and Yang, Y. (1970). "Modern control engineering".
[34]. Ohtori, Y., Christenson, R., Spencer Jr, B., and Dyke, S. (2004).
"Benchmark control problems for seismically excited nonlinear buildings."
Journal of Engineering Mechanics, 130(4), 366-385.
[35]. Ohtori, Y., and Spencer Jr, B. "A MATLAB-based tool for nonlinear
structural analysis ".Presented at Proc. of the 13th Engineering Mechanics Conf.
[36]. Pandya, J., Akbay, Z., Uras, M., and Aktan, H. "Experimental
implementation of hybrid control." Presented at Building an International
Community of Structural Engineers.
[37]. SAC. (1996). "The SAC Steel project". City.
[38]. Sadek, F., and Mohraz, B. (1998). "Semiactive control algorithms for
structures with variable dampers." Journal of Engineering Mechanics, 124(9),
981-990.

119
[39]. Salam, S. A., Shaalan, O., Elhoseny, Y., and Fathy, I. (2012).
"OPTIMIZING THE PLACEMENT OF SIMI-ACTIVE HYDRAULIC
DAMPERS IN BUILDINGS USING FEA." Journal of American Science (ISSN
1545-1003), USA.
[40]. Schmitendorf, W., Jabbari, F., and Yang, J. (1994). "Robust control
techniques for buildings under earthquake excitation." Earthquake engineering &
structural dynamics, 23(5), 539-552.
[41]. Somerville, P. G., and Venture, S. J. (1997). Development of ground
motion time histories for phase 2 of the FEMA/SAC steel project : SAC Joint
Venture.
[42]. Spencer Jr, B., Carlson, J. D., Sain, M., and Yang, G" .On the current status
of magnetorheological dampers: seismic protection of full-scale structures."
Presented at American Control Conference, 1997. Proceedings of the 1997.
[43]. Spencer Jr, B., and Sain, M. K. (1997). "Controlling buildings: a new
frontier in feedback." Control Systems, IEEE, 17(6), 19-35.
[44]. Spencer Jr, B., and Soong, T. "New applications and development of
active, semi-active and hybrid control techniques for seismic and non-seismic
vibration in the USA." Presented at Proceedings of international post-SMiRT
conference seminar on seismic isolation, passive energy dissipation and active
control of vibration of structures.
[45]. Symans, M. D., and Constantinou, M. C. (1997). "Seismic testing of a
building structure with a semi-active fluid damper control system." Earthquake
Engineering & Structural Dynamics, 26(7), 759-777.
[46]. Tanida, K. "Active control of bridge towers during erection." Presented at
Proc. 3 rd Colloquium on Vib. Control of Structures, JSCE, part A.

120
[47]. testing, s. o. l. s. r. t. p. d. h. (201 1" .) NEES@Lehigh". City:
Nees.lehigh.edu. 2011.
[48]. Venture, S. J., Committee, G. D., and Venture, S. J. (2000). Recommended
seismic design criteria for new steel moment-frame buildings: Federal Emergency
Management Agency.
[49]. Villamizar Mejia, R. (2005). Robust control of systems subjected to
uncertain disturbances and actuator dynamics: Universitat de Girona.
[50]. Wang, S. G. (2003). "Robust active control for uncertain structural
systems with acceleration sensors." Journal of Structural Control, 10(1), 59-76.
[51]. Yang ,J., Lin, S., Jabbari, F., and Schmitendorf, W. "H infinity Control
With Peak Response Constraints: Energy Bounded & Peak Bounded Excitations."
Presented at Proceedings of the Third World Conference on Structural Control .
[52]. Yang, J., Wu, J., and Li, Z. (19 96" .) Control of seismic-excited buildings
using active variable stiffness systems." Engineering Structures, 18(8), 589-596.
[53]. Yi, F., and Dyke, S. J. "Structural control systems: performance
assessment." Presented at American Control Conference, 2000. Proceedings of the
2000.
[54]. Yoshida, K., Kang, S., and Kim, T. "LQG control and H∞ control of
vibration isolation for multi-degree-of-freedom systems." Presented at 1st Wolrd
Conference on Structural Control.
121
المالحق:
(:CDمرفق في )
منشور في مجلة جامعة دمشق.الالبحث -1
( وشرحه.MATLAB&SAP2000برنامج ) -2
(.MATLABمع نماذ األبنية الثالثة بواسطة )برنامج التحكم -3
Abstract:
The world is witnessing a growing demand for buildings resistant to severe
earthquakes, but in spite of the development of risk reduction methods and seismic
design codes, we still suffer from human and economic losses, especially in important
buildings (such as hospitals, banks...). Therefore, the researchers always seeks to find
better solutions to improve buildings seismic response and reduce earthquakes risks.
The Semi Active Control of dynamic response is a smart and adaptable solution
for this problem, through using Magneto Rheological (MR) dampers, which properties
can be controlled (by a computer and a control program ).When MR dampers are
implanted in a building, we can control the building response in the real time to a
dynamic movement. This dampers requires low electrical energy comparing with Active
control (which requires using hydraulic compressors and engines ), but they can be
tuned to adapt to the dynamic load which the building is subject to, making it the better
solution to improve the response of buildings that can’t be improved by seismic isolation
( high rise buildings).
This article presents the impact of the use of Semi Active control to the seismic
response of buildings exposed to earthquakes using MR dampers. MR Dampers are
controlled, by the optimal linear control theory in MATLAB, by electrical orders change
in the field (0 ~2.5 A).Then results are compared with the Uncontrolled building
(without dampers), and traditional Passive controlled building, where the dampers
works the whole length of time by constant electric current (2.5 A). The 3-storey. 9-storey and 20-storey buildings used for this study are typical low,
medium and high-rise buildings of the Los Angeles area, California. Although not built,
they verify the terms of ACI. These buildings are benchmark for the studies of (SAC),
what will provide a basis for a broader comparison the results of this study. The study
uses four basic earthquake records and six derivative of them, these records are
examples of earthquake may affect a seismic zone with probability of 50%, 10% and
2% in the fifty years. These records are examples of near and far field earthquakes. All
these earthquakes give proposed semi-Active control method accurate results and
reliable performance of the controller.

The results show Effectiveness of Semi Active Control in improving the response
of the building by reducing the maximum displacement of the building and the relative
displacement between floors as well as reducing energy damped by deformation of
frame joints, which proves that the Semi Active Control is the best solution for reducing
seismic risk on high-rise buildings.
KEY WORDS: Semi active control, structural control, MR dampers, LQR, H∞
Damascus University High Institute Of Earthquake Studies and Research
Dept. of Earthquake Structural Engineering
2015
Improving seismic response with semi Active control
Thesis submitted to the
Higher Institute of Seismic Research and Studies, Damascus University
MASTER
In
Seismic Structural Engineering
By
Yazan Mahmoud Algasin
Approved by the Examining Committee:
Prof. Dr. Eng. Mohammad Al_Samara Head of Committee
Dr. Eng. Hala T. Hasan Main Advisor
Dr. Eng. Rabee Al_Safadi Member
Damascus University High Institute Of Earthquake Studies and Research
Dept. of Earthquake Structural Engineering
Improving seismic response of Structures
by semi Active control
A thesis submitted as a partial fulfillment
for the Master degree in Structural earthquake engineering
By
Yazan Mahmoud Al_Gasin
Under the Supervision of
Dr. Eng. Hala T. Hasan Dr. Eng. Turki Tabak
Doctor of Structural Engineering Doctor of Civil Engineering Higher Institute of Earthquake Studies
& Research Damascus University Scientific Studies and Research
Center
Damascus, 2015