Шестнадцатая научная конференция «Шаг в будущее,...
DESCRIPTION
Шестнадцатая научная конференция «Шаг в будущее, Москва». РАЗРАБОТКА И ИССЛЕДОВАНИЕ ВОЗМОЖНОСТЕЙ ПРОГРАММИРУЕМОГО САМОХОДНОГО МЕХАТРОННОГО АППАРАТА Автор: Ривкин Андрей Маркович, Л ицей №1581, 11 класс - PowerPoint PPT PresentationTRANSCRIPT

Шестнадцатая научная конференция «Шаг в будущее, Москва»
РАЗРАБОТКА И ИССЛЕДОВАНИЕ ВОЗМОЖНОСТЕЙ ПРОГРАММИРУЕМОГО САМОХОДНОГО МЕХАТРОННОГО АППАРАТА
Автор: Ривкин Андрей Маркович, Лицей №1581, 11 класс
Руководитель: Власов Андрей Игоревич
Доцент кафедры Иу4 МГТУ им Баумана, к.т.н.
Актуальность работы
• Работа на других планетах и исследование труднодоступных мест
• Автоматизация рутинных работ• Автоматизация опасных для человека работ• Создание устройств, облегчающих работу
человеку• Качество и быстрота выполнения задачи
Картинка с областями применения

Цель проекта:
• Исследование архитектуры и принципов построения мехатронных аппаратов
• Исследование датчиков Robo-PICA• Исследование методов программирования
микроконтроллера PIC• Исследование методов навигации робота в
пространстве• Исследование возможности и ограничений
использования для навигации метода цветовой разметки
Создание самоходного мехатронного аппарата Robo-PICA
Решаемые задачи:

Архитектура и компоненты СМА
• Механическая часть• Рама• Батарейный отсек• Гусеницы• Датчики (гибкое расположение)
• Электрическая часть• Электрическая схемы
выполнена на одной печатной плате
• Микроконтроллер PIC16F877A• Исполнительные устройства• Датчики (стандартный разъем)

Датчики и исполнительные устройства
• Базовый комплект датчиков• ZX-03 ZX-03 - инфракрасный - инфракрасный
отражатель, позволяющий отражатель, позволяющий определить цвет объектаопределить цвет объекта
• ZX-08ZX-08 - - инфракрасный датчик инфракрасный датчик бесконтактного обнаружения бесконтактного обнаружения объектовобъектов
• ZX-05ZX-05 – инфракрасный – инфракрасный приемник, для приемаприемник, для приема сигналов игналов с пульта дистанционного с пульта дистанционного управления управления ER – ER – 44
• Дополнительные датчикиДополнительные датчики• Исполнительные устройстваИсполнительные устройства
• МоторыМоторы• ДинамикДинамик• ЭкранЭкран• ЛампочкиЛампочки
• Программа – связь датчиков Программа – связь датчиков и исполнительных устройстви исполнительных устройств

Пример: Инфракрасный отражатель ZX - 03
• Испускает инфракрасный сигнал и затем ловит отражение этого инфракрасного сигнала от поверхности
• Отраженный сигнал попадает на базу транзистора и открывает его
• Работает только в непосредственной близости к объекту (3-8мм)
• Расположен под рамой• Позволяет определить цвет
поверхности

Программирование микроконтроллера
Программа чтения с датчиков и отображения на дисплейПрограмма управления двигателямиПрограмма вывода данных на компьютер

Способы навигации – преимущества и недостатки
• Водитель-тренер• Дорого• Неточно
• GPS-навигация• Дорого• Не действует в закрытых помещениях
• Программа• Не точно
• Рельсы• Прокладка рельс• Не удобно при малых расстояниях
• Разметка (Ч/Б)• Недорого• Просто менять• Непредсказуемость поведения при
пересечении маршрутов
• Цветовая разметка
-

Методика исследования
• Выбор цветов разметки• Анализ влияния внешних факторов:
• Освещенность• Загрязненность• Тип поверхности
• Создание образцов• Создание программы измерения
уровня отражения• Измерения• Сведение данных в таблицу• Построение графика• Анализ полученных данных• Выводы

Выбор цветов разметки
• Вначале 9 основных цветов при одинаковых условиях
• Отличаются: Черный, Белый и Коричневый
• Создали Серый и Темнозеленый
• Можно использовать 5 хорошо определяемых цветов
60
270
975 977 977 978 980 981 983
0
200
400
600
800
1000
1200
Черный
Коричневый
Зелен
ый
Фиол
етов
ый
Жел
тый
Красны
й
Рыжий
Синий
Белый
60145
270
530
977
0
200
400
600
800
1000
1200
Черный Серый Коричневый Темнозеленый
Белый
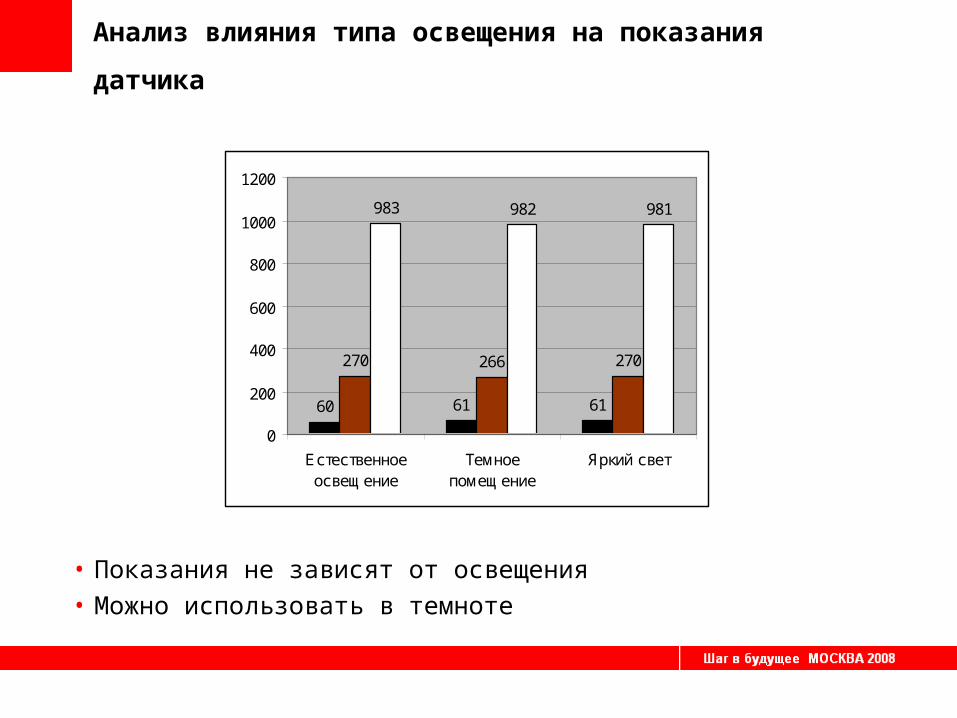
Анализ влияния типа освещения на показания датчика
• Показания не зависят от освещения• Можно использовать в темноте
60 61 61
270 266 270
983 982 981
0
200
400
600
800
1000
1200
Естественноеосвещение
Темноепомещение
Яркий свет

Анализ влияния загрязнений
• Загрязнения сильно искажают показания датчика• Нельзя использовать на улице
60104
270340
983
790
0
200
400
600
800
1000
1200
Простой Загрязненный

Анализ влияния типа поверхности
• 4 различные поверхности с разной плотностью и текстурой• Показания не зависят от типа поверхности
60 61 58 62
270 272 267 269
983 977 984 980
0
200
400
600
800
1000
1200
Бумага дерево кафель пластик

Результаты работы
• Был создан СМА• Исследована архитектура, датчики и программирование
СМА• Мехатронные устройства на базе PIC микроконтроллера
просты в изготовлении, недороги, могут быть использованы в промышленных целях
• Метод цветовой разметки может использоваться для навигации в
• Закрытых помещениях• В неосвещенных местах (туннели, шахты)
• Выбраны цвета наиболее удобные для использование при разметке

Демонстрация

Вопросы