郑惠萍 河北科技大学机械电子工程学院
DESCRIPTION
第二章 测试装置的基本特性. 郑惠萍 河北科技大学机械电子工程学院. 主 要 内 容. 概述 测试装置的静态特性 测试装置的动态特性 测试装置对任意输入的响应 实现不失真测试的条件 测试装置动态特性的测量 负载效应 测试装置的抗干扰. §1 概 述. 随着测试目的和要求的不同,测试装置的组成、复杂程度有很大差别。 例 1 :简单的温度测试装置 --- 液注式温度计 例 2 :机床动态特性测试系统 例 3 :设备运行状态检测系统 对测试装置的基本要求 线性系统及其主要性质 测试装置的性质. 对测试装置的基本要求 1. 工程测试问题有三类: - PowerPoint PPT PresentationTRANSCRIPT
郑惠萍
河北科技大学机械电子工程学院
第二章 测试装置的基本特性
河北科技大学 郑惠萍
主 要 内 容• 概述• 测试装置的静态特性• 测试装置的动态特性• 测试装置对任意输入的响应• 实现不失真测试的条件• 测试装置动态特性的测量• 负载效应• 测试装置的抗干扰
河北科技大学 郑惠萍
§1 概 述 随着测试目的和要求的不同,测试装置
的组成、复杂程度有很大差别。– 例 1 :简单的温度测试装置 --- 液注式温度计– 例 2 :机床动态特性测试系统– 例 3 :设备运行状态检测系统
• 对测试装置的基本要求• 线性系统及其主要性质• 测试装置的性质

河北科技大学 郑惠萍
对测试装置的基本要求 1
工程测试问题有三类: 1 )如果 x(t) 、 y(t) 可以观察 ( 已知 ) ,则可推断 h(t) 。 2 )如果 h(t) 已知, y(t) 可测,则可推断 x(t) 。 3 )如果 x(t) 和 h(t) 已知,则可推断和估计 y(t) 。
河北科技大学 郑惠萍
对测试装置的基本要求 2
• 研究对象 + 测试装置作为一个系统– 举例说明
• 研究对象是测试装置本身 ---- 测试装置的定度(标度)问题
• 理想的测试装置应具有单值的、确定的输入 -输出关系;输出与输入成线性关系为最佳。
• 实际的测试装置只能在较小的范围和一定的误差允许范围内满足线性要求。
河北科技大学 郑惠萍
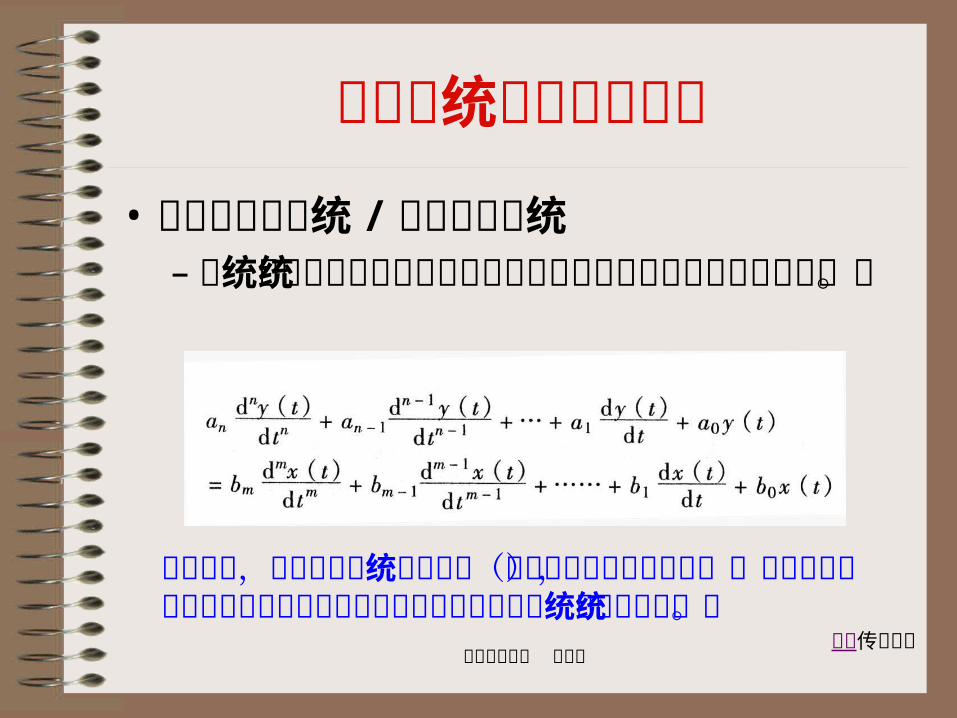
线性系统及其主要性质• 时不变线性系统 / 定常线性系统
– 系统的输入与输出的关系可用常系数线性微分方程来描述的系统。
严格的说,很多物理系统是时变的(因为不稳定因素的存在),但在工程上常可以以足够的精确度认为大多数常见物理系统是时不变系统。 返回传
递函数
河北科技大学 郑惠萍
时不变线性系统的主要性质 1
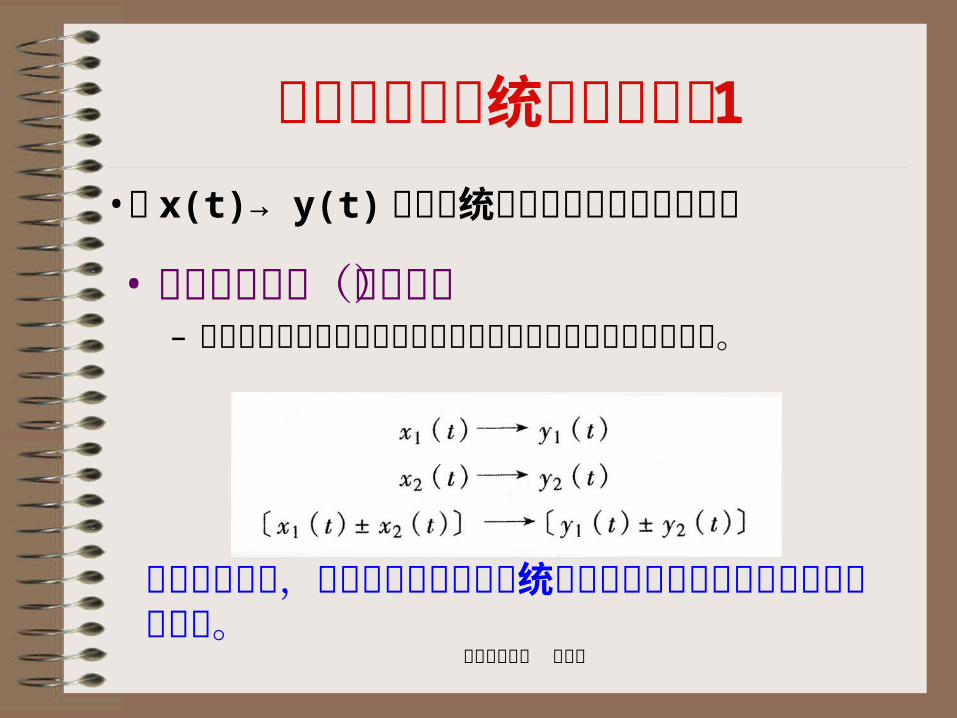
• 符合叠加原理(很重要)– 几个输入所产生的总输出是各个输入所产生的输
出叠加的结果。
符合叠加原理,意味着作用于线性系统的各个输入所产生的输出是互不影响的。
•以 x(t)→ y(t) 表示系统的输入、输出的对应关系
河北科技大学 郑惠萍
时不变线性系统的主要性质 2
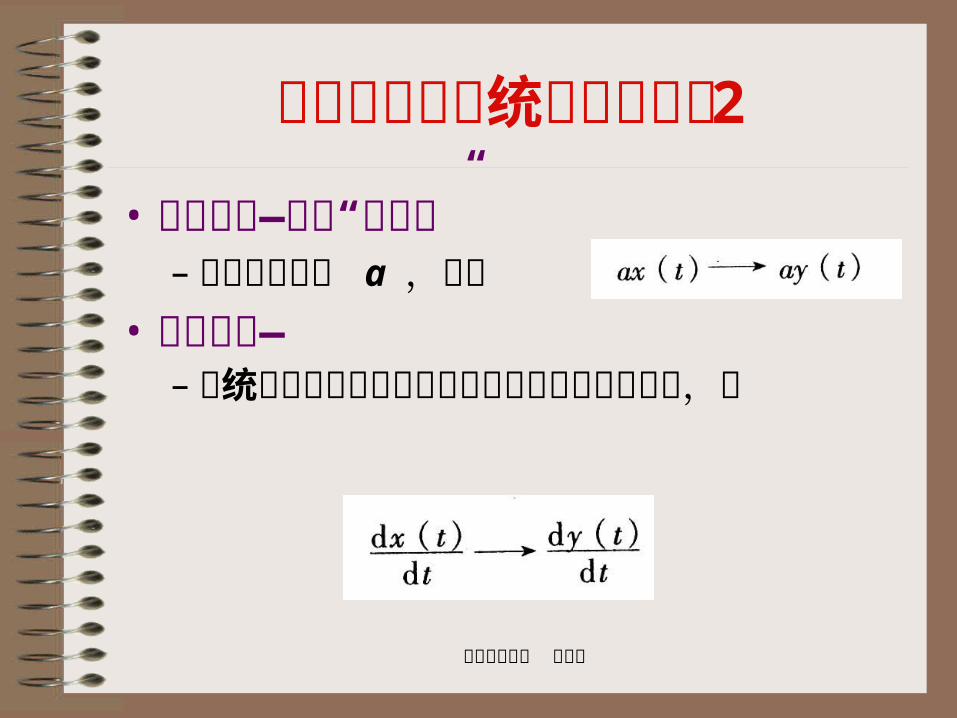
• 比例特性—又称“均匀性”– 对于任意常数 a ,必有
• 微分特性—– 系统对输入导数的响应等于对原输入响应
的导数,即
河北科技大学 郑惠萍
时不变线性系统的主要性质 3
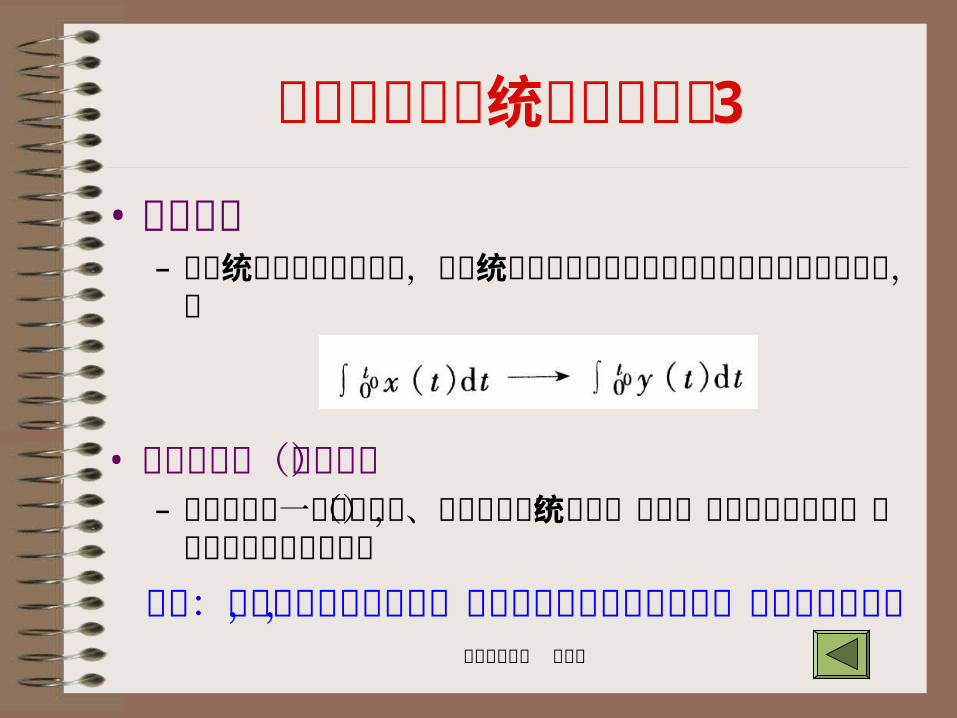
• 积分特性– 如系统的初始状态均为零,则系统对输入积分的响
应等同于对原输入响应的积分,即
• 频率保持性(很重要)– 若输入为某一频率的简谐(正弦或余弦)信号,则
系统的稳态输出必是、也只是同频率的简谐信号
应用:利用此性质判断噪声,进而利用相应的滤波技术,提取有用的信息
河北科技大学 郑惠萍
测试装置的性质
• 静态特性• 动态特性• 负载特性• 抗干扰性
河北科技大学 郑惠萍
§2 测试装置的静态特性在静态测量中,定常线性系统的输入 - 输出微分方程式变成 理想的定常线性系统,其输出将是输入的单调、线性比例函数,其中斜率 S 是灵敏度,应是常数。 实际的测量装置并非理想的定常线性系统,其微分方程式的系数并非常数。通常会是
河北科技大学 郑惠萍
测试装置的静态特性
• 线性度• 灵敏度、分辨力• 回程误差• 零点漂移和灵敏度漂移
注意:测试装置的静态特性就是在静态测试情况下描述实际测试装置与理想定常线性系统的接近程度
河北科技大学 郑惠萍
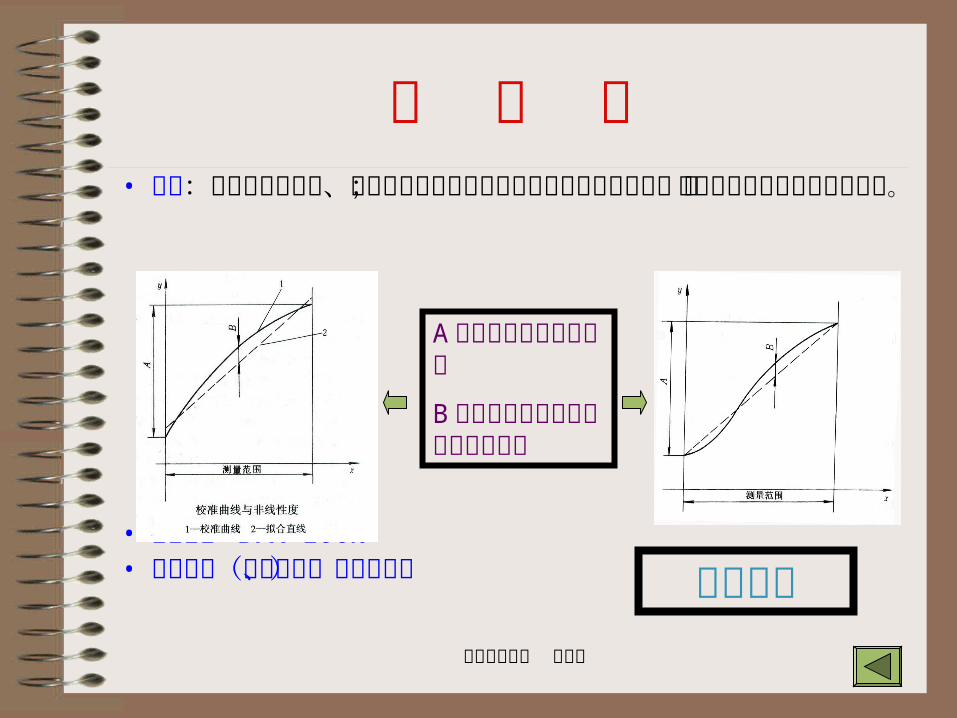
线 性 度• 定义:指测量装置输出、输入之间的关系与理想比例关系
的偏离程度;即校准曲线接近拟合直线的程度。
• 线性误差 =B/A*100%• 拟合直线(独立直线、端基直线)
A 为装置的标称输出范围
B 为校准曲线与拟合直线的最大偏差
静态校准
河北科技大学 郑惠萍
灵敏度、分辨力 1当装置的输入 x 有一个变化量∆ x ,它引起输出 y 发生相应的变化量∆ y ,则定义灵敏度 对于理想的定常线性系统,灵敏度应当是
但是,一般的测试装置总不是理想定常线性系统,用拟合直线的斜率来作为该装置的灵敏度。 注意:灵敏度有量纲,其单位取决于输入、输出量的单位。
x
ys
常数
0
0
ab
xy
xyS
河北科技大学 郑惠萍
灵敏度、分辨力 2
通常,把引起测量装置输出值产生一个可察觉变化的最小输入量(被测量)变化值称为分辨力。
通常表示为它与可能输入范围之比的百分数。
它用来描述装置对输入微小变化的响应能力。
注意:灵敏度和分辨力都是用来描述测量装置对被测量变化的反应能力的。
河北科技大学 郑惠萍
回 程 误 差
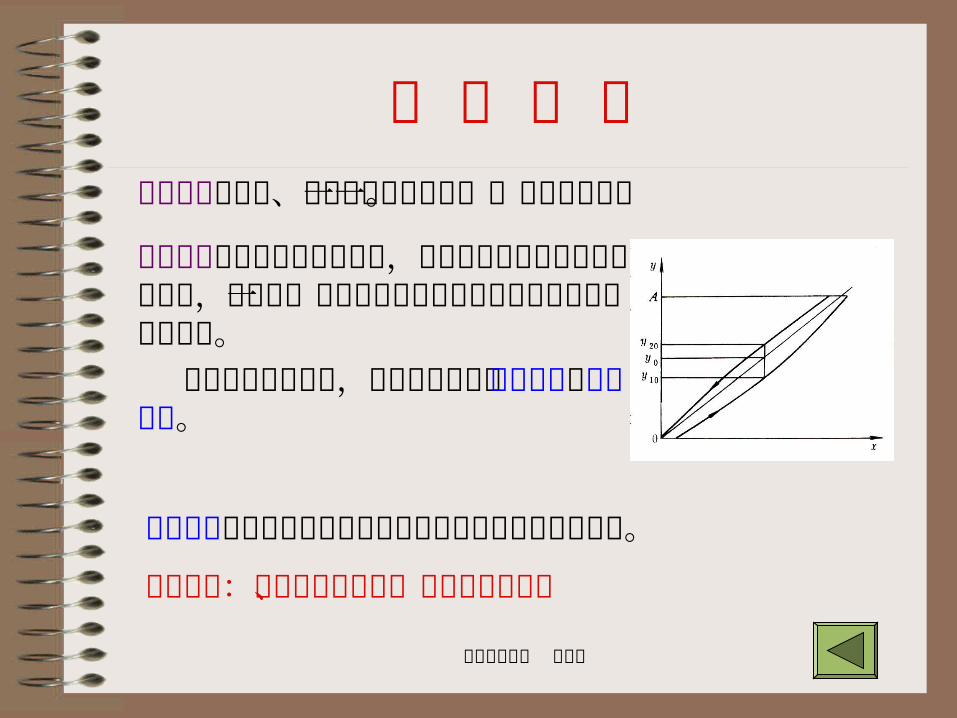
实际装置在同样的测试条件下,当输入量由小增大和由大减小时,对于同一输入量所得到的两个输出量却往往存在着差值。 把在全测量范围内,最大的差值称为回程误差或滞后误差。
理想装置的输出、输入有完全单调的一一对应的关系。
回程误差描述测试装置的输出同输入变化方向有关的特性。
产生原因:滞后现象的后果、装置死区的存在
河北科技大学 郑惠萍
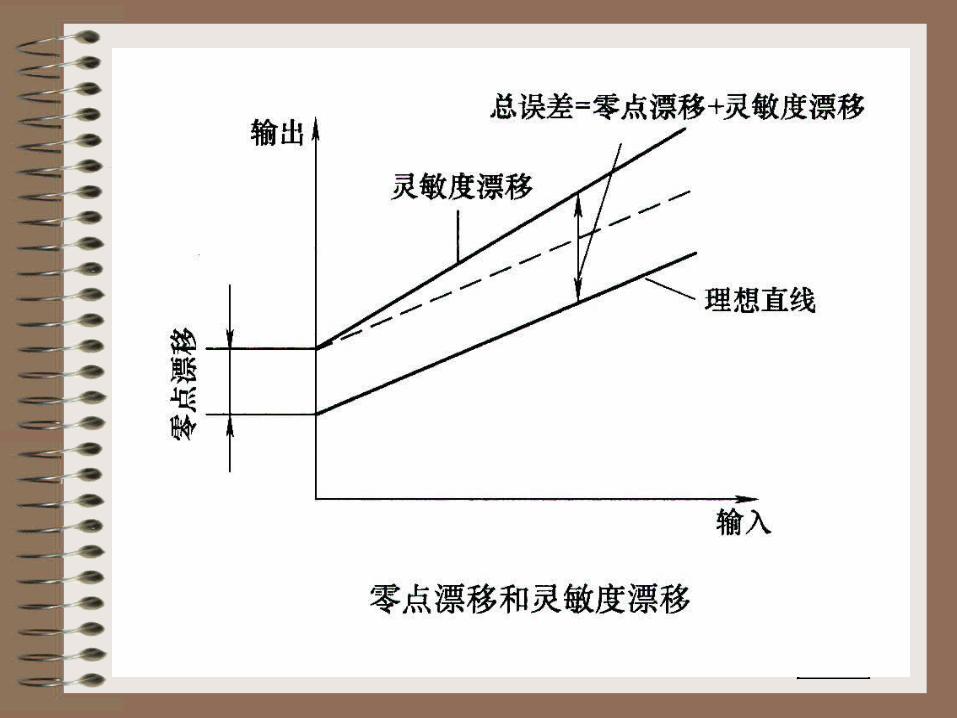
零点漂移和灵敏度漂移 稳定度是指测量装置在规定条件下保持其测量特性恒定不变的能力。
通常在不指明影响量时,稳定度指装置不受时间变化影响的能力。
漂移是指测量特性随时间的慢变化。
零点漂移是测量装置的输出零点偏离原始零点的距离,它可以是随时间缓慢变化的量;
灵敏度漂移是指由于材料性质的变化所引起的输入与输出关系(斜率)的变化。
总误差 = 零点漂移 +灵敏度漂移
河北科技大学 郑惠萍
河北科技大学 郑惠萍
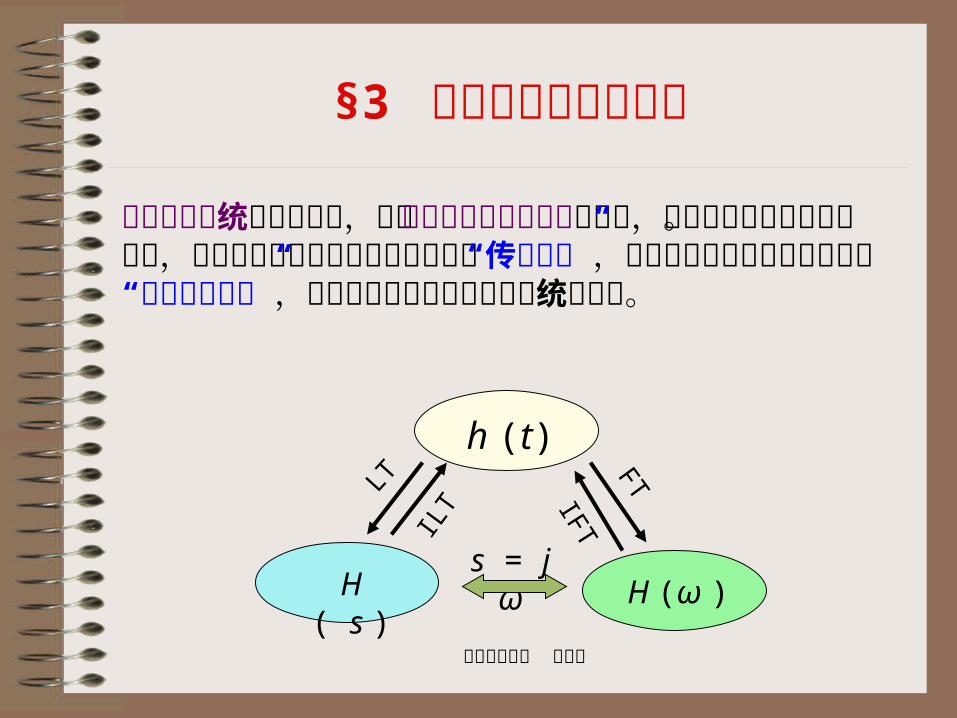
§3 测试装置的动态特性
定常线性系统的测试装置,可用常系数线性微分方程来描述,但使用时有许多不便。因此,常通过拉普拉斯变换建立其相应的“传递函数”,通过傅立叶变换建立其相应的“频率响应函数”,以便更简便地描述装置或系统的特性。
h (t)
H ( s ) H (ω )s = j ω
FT
IFTLT
ILT
河北科技大学 郑惠萍
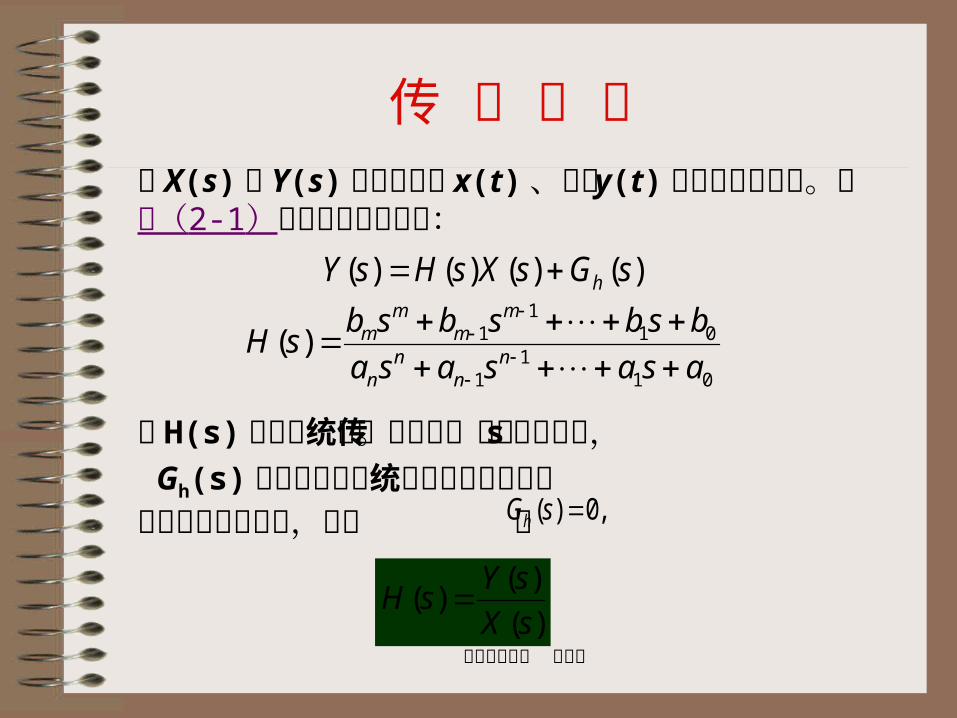
传 递 函 数设X(s) 和 Y(s) 分别为输入 x(t) 、输出 y(t) 的拉普拉斯变换。对式(2-1)取拉普拉斯变化得:
将 H(s) 称为系统的传递函数。其中 s为复变量, Gh(s) 是与输入和系统初始条件有关的。若初始条件全为零,则因 有
)()()()( sGsXsHsY h
011
1
011
1)(asasasa
bsbsbsbsH
nn
nn
mm
mm
)(
)()(
sX
sYsH
,0)( sGh
河北科技大学 郑惠萍
传 递 函 数 的 特 点
1 ) H(s) 与输入 x(t) 及系统的初始状态无关,它只表达了系统的传输特性。
2 ) H(s) 只反映系统传输特性而不拘泥于系统的物理结构。即具有相似传递函数的不同系统 , 物理性质完全相同。
3 ) an 、 bn 等系数的量纲将因具体物理系统和输入、输出的量纲而异。
4 ) H(s) 中的分母取决于系统的结构。
河北科技大学 郑惠萍
频 率 响 应 函 数
频率响应函数是在频率域中描述和考察系统特性的。
与传递函数相比较,频率响应的物理概念明确,也易通过实验来建立;利用它和传递函数的关系,由它极易求出传递函数。因此频率响应函数是实验研究系统的重要工具。
河北科技大学 郑惠萍
幅频特性、相频特性和频率响应函数
• 定常线性系统在简谐信号的激励下,系统的频率特性:• 幅频特性:稳态输出信号和输入信号的幅值比。记为
A(ω) 。
• 相频特性:稳态输出对输入的相位差。记为 φ(ω) 。
• 系统的频率响应函数为
XA
YAA
XY
jeAH
河北科技大学 郑惠萍
频率响应函数的求法 1 在系统的传递函数已知的情况下,只要令H(s) 中 s = jω便可
求得。
实验方法 1 :在初始条件为零的情况下,同时测得输入 x(t)
和输出 y(t) ,由傅里叶变换 X(ω) 和 Y(ω) ,求得频率响应函数 H(ω)=Y(ω)/X(ω)
因为若研究在 t = 0 时刻将激励信号接入稳定常系数线性系统时,令 s = jω代入拉普拉斯变换中,实际上拉普拉斯变换就变成傅里叶变换。
河北科技大学 郑惠萍
频率响应函数的求法 2
实验方法 2
对某个 ,有一组 和 ,全部的 和 , 便可表达系统的频率响应函数。
i
ii X
YA
0
0 XYi i
iiA —ii — ,2,1i
X Y0i 0i系统激励 输出
河北科技大学 郑惠萍
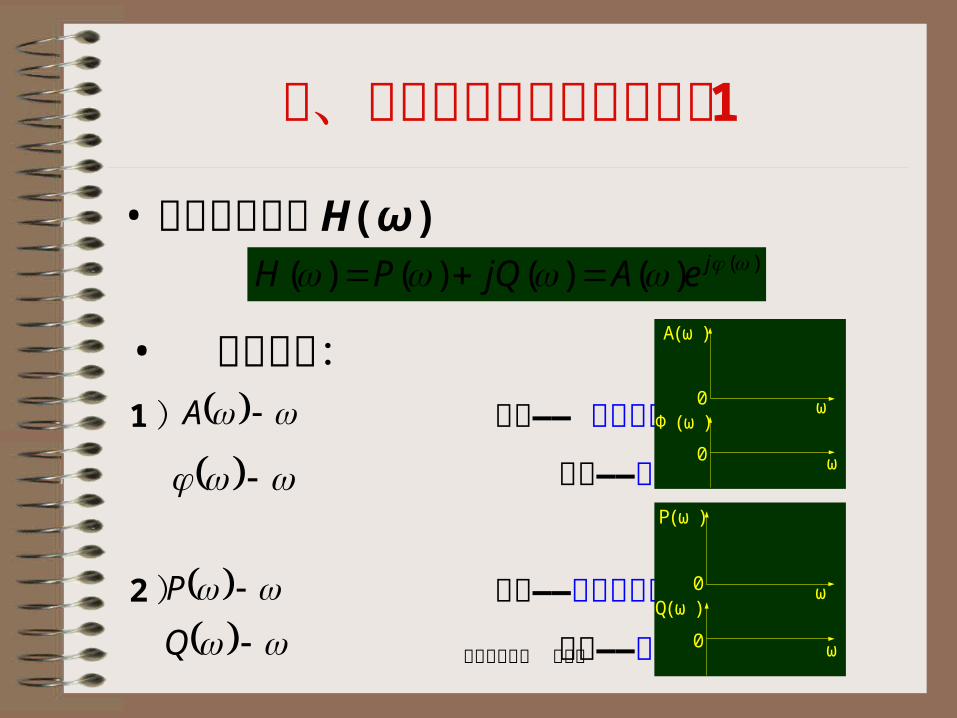
幅、相频率特性和其图象描述 1
• 频率响应函数 H(ω))()()()()( jeAjQPH
• 图象描述:1 ) 曲线—— 幅频特性曲线
曲线——相频特性曲线
2 ) 曲线——实频特性曲线
曲线——虚频特性曲线
A
P
Q
ω
ω
0
0
A(ω )
Φ (ω )
ω
ω
0
0
P(ω )
Q(ω )
河北科技大学 郑惠萍
幅、相频率特性和其图象描述 2
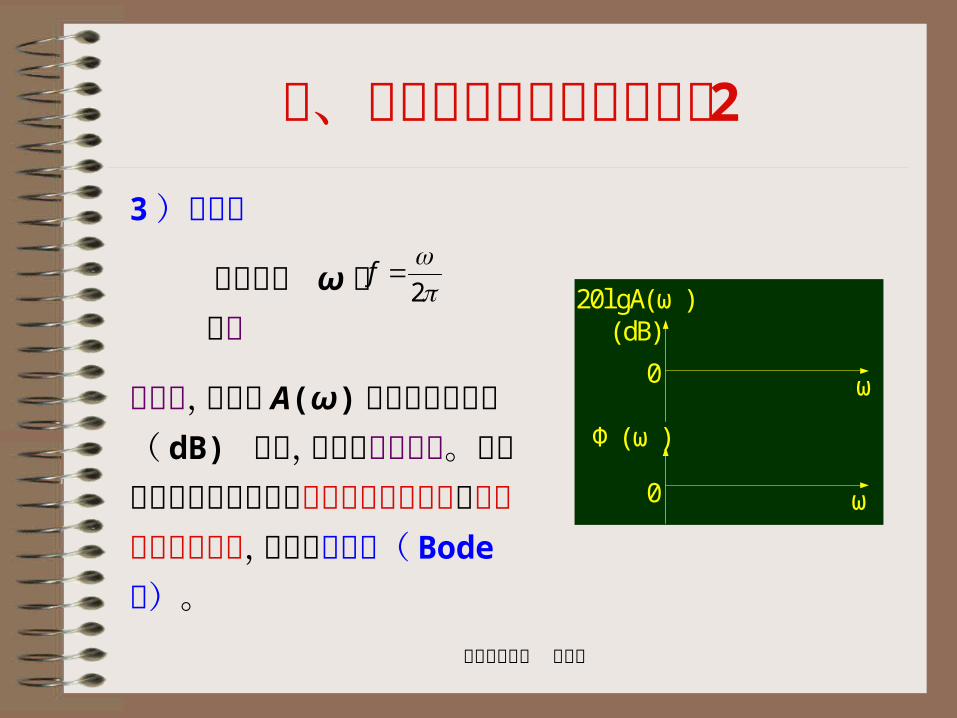
3 )伯德图
对自变量 ω 或 取对
数标尺,幅值比 A(ω) 的坐标取分贝数( dB) 标尺,相角取实数标尺。由此所作的曲线分别称为对数幅频特性曲线和对数相频特性曲线,总称为伯德图( Bode图)。
ω
ω
0
20l gA(ω )(dB)
Φ (ω )
0
2
f
河北科技大学 郑惠萍
幅、相频率特性和其图象描述 3
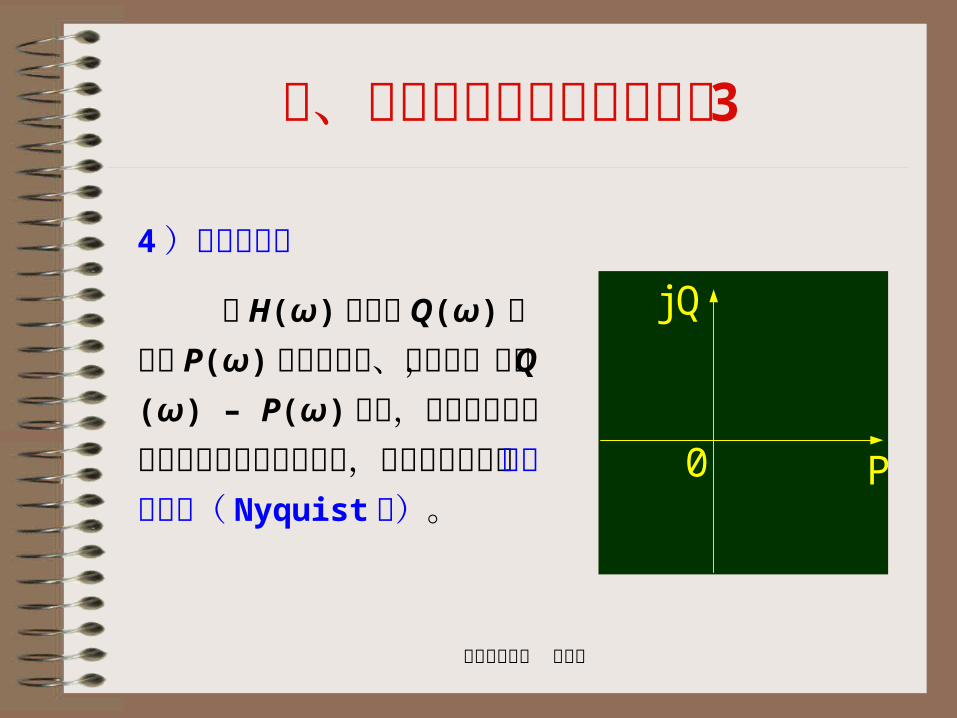
4 )奈魁斯特图
将 H(ω) 的虚部 Q(ω) 和实部 P(ω) 分别作为纵、横坐标,画出 Q(ω) – P(ω) 曲线,并在曲线某些点上分别注明相应的频率,所得的图像称为奈魁斯特图( Nyquist图)。
P
j Q
0
河北科技大学 郑惠萍
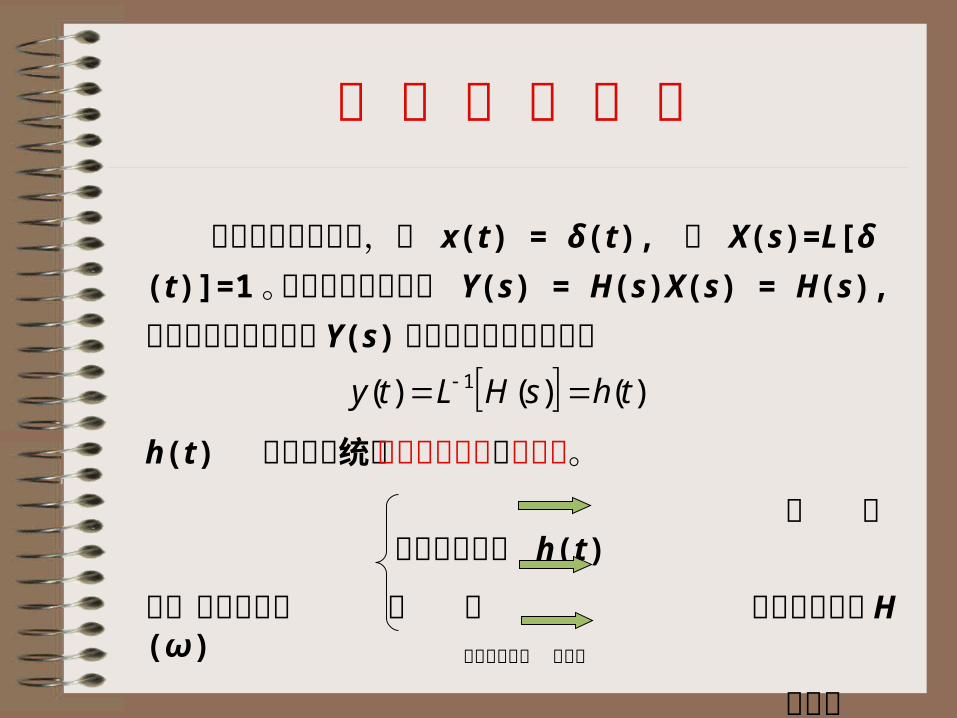
脉 冲 响 应 函 数
若输入为单位脉冲,即 x(t) = δ(t), 则 X(s)=L[δ(t)]=
1 。装置的相应输出是 Y(s) = H(s)X(s) = H(s), 其时域描述可通过对 Y(s) 的拉普拉斯反变换得到
h(t) 常称为系统的脉冲响应函数或权函数。
时 域 脉冲响应函数 h(t)
系统特性的描述 频 域 频率响应函数 H(ω)
复数域 传递函数 H(s)
)()()( 1 thsHLty
河北科技大学 郑惠萍
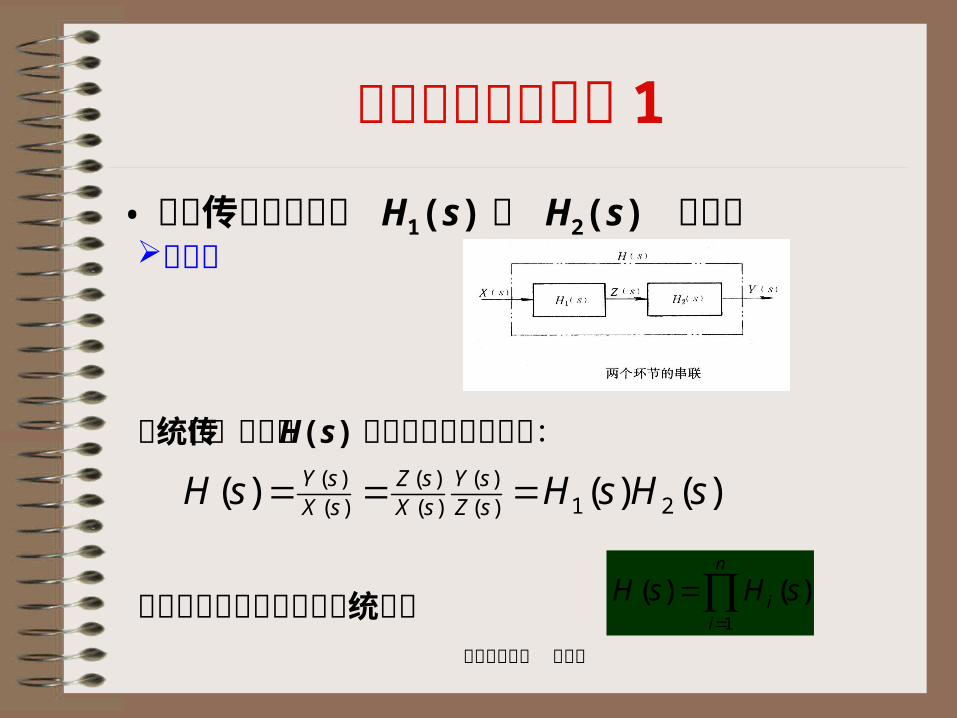
环节的串联和并联 1
• 两个传递函数各为 H1(s) 和 H2(s) 的环节串联时
系统的传递函数 H(s) 在初始条件为零时为:
对几个环节串联组成的系统,有
)()()( 21)()(
)()(
)()( sHsHsH sZ
sYsXsZ
sXsY
n
ii sHsH
1
)()(
河北科技大学 郑惠萍
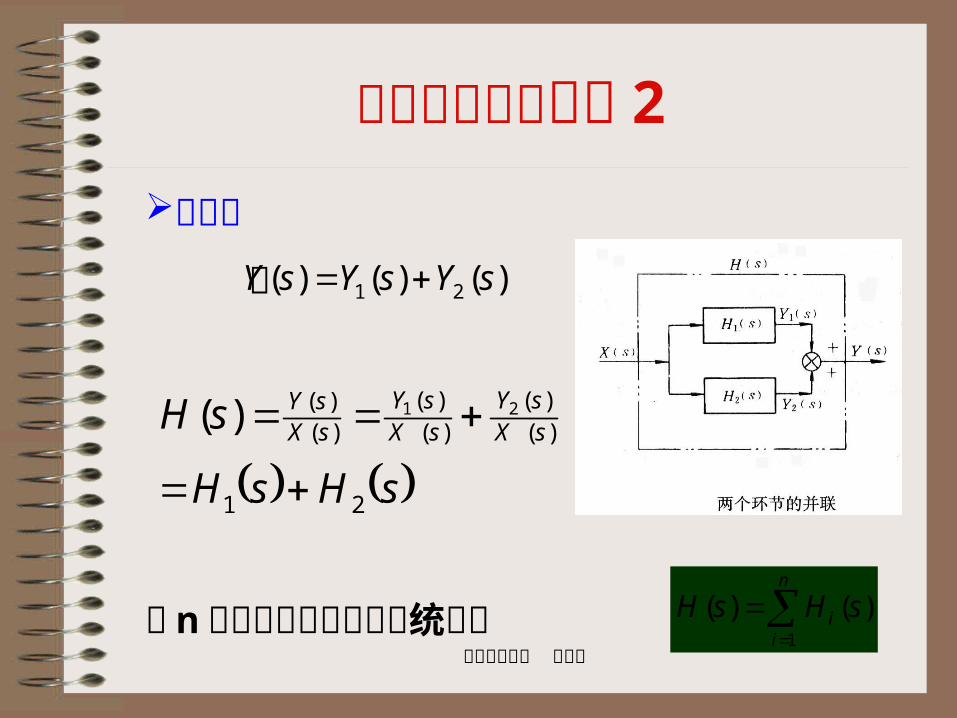
环节的串联和并联 2
并联时
因
由 n 个环节并联组成的系统,有
)()()( 21 sYsYsY
sHsH
sH sXsY
sXsY
sXsY
21
)()(
)()(
)()( 21)(
n
ii sHsH
1
)()(
河北科技大学 郑惠萍
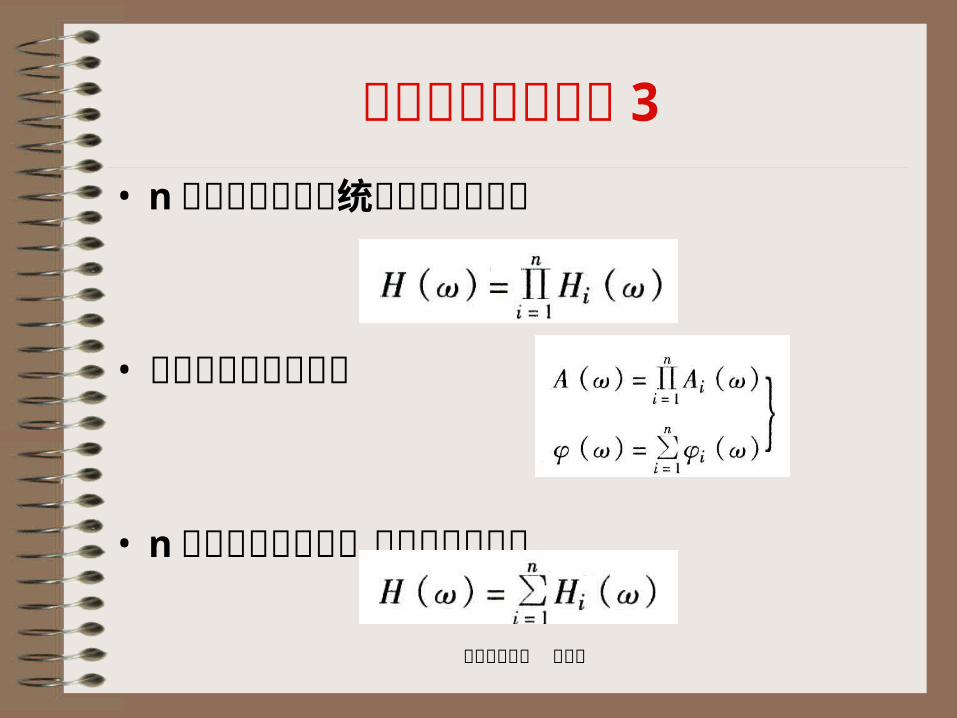
环节的串联和并联 3
• n 个环节串联时系统的频率响应函数
• 其相频和幅频分别为
• n 个环节并联时系统的频率响应函数
河北科技大学 郑惠萍
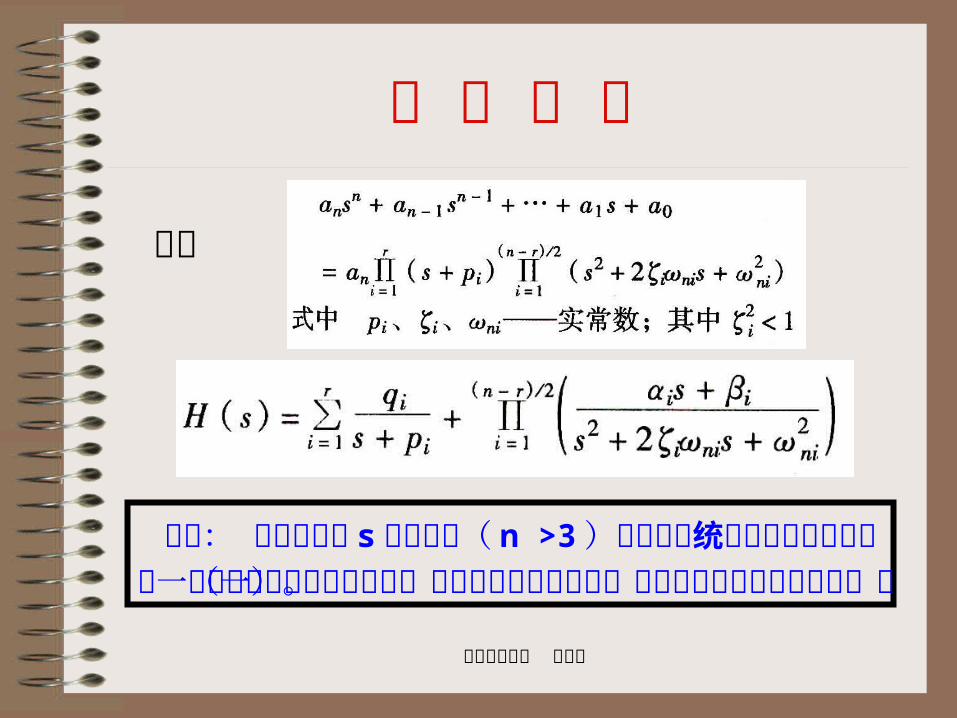
特 别 注 意
因为
结论: 任何分母中 s高于三次( n >3 )的高阶系统都可以看作是若干个一阶环节和二阶环节的并联(也自然可转化为若干一阶环节和二阶环节的串联)。
河北科技大学 郑惠萍
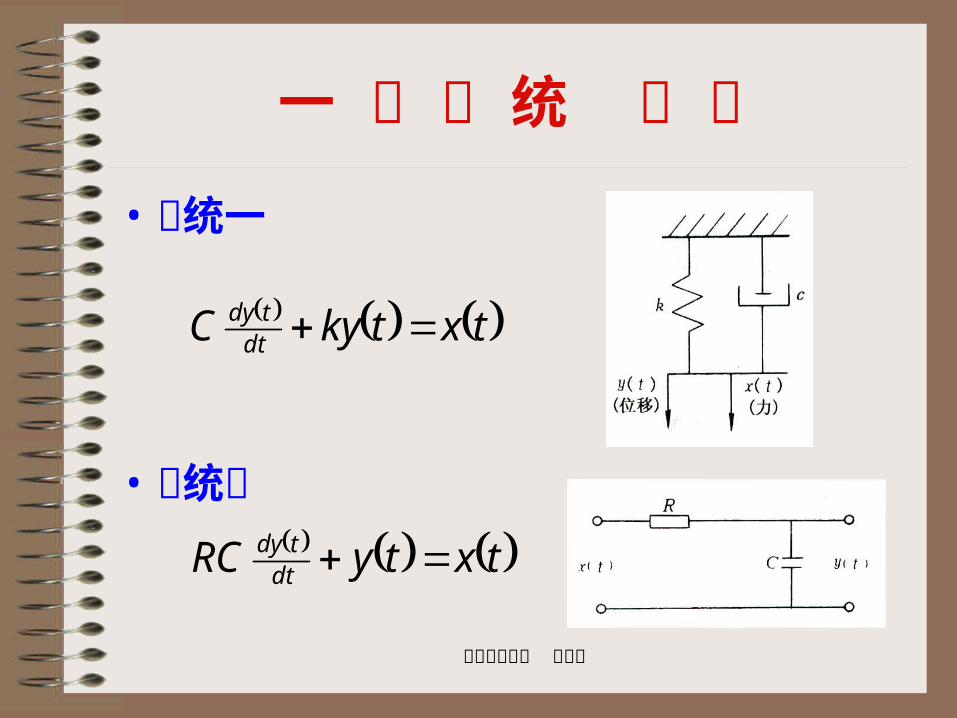
一 阶 系 统 实 例• 系统一
• 系统二 txtyRC dttdy
txtkyC dttdy
河北科技大学 郑惠萍
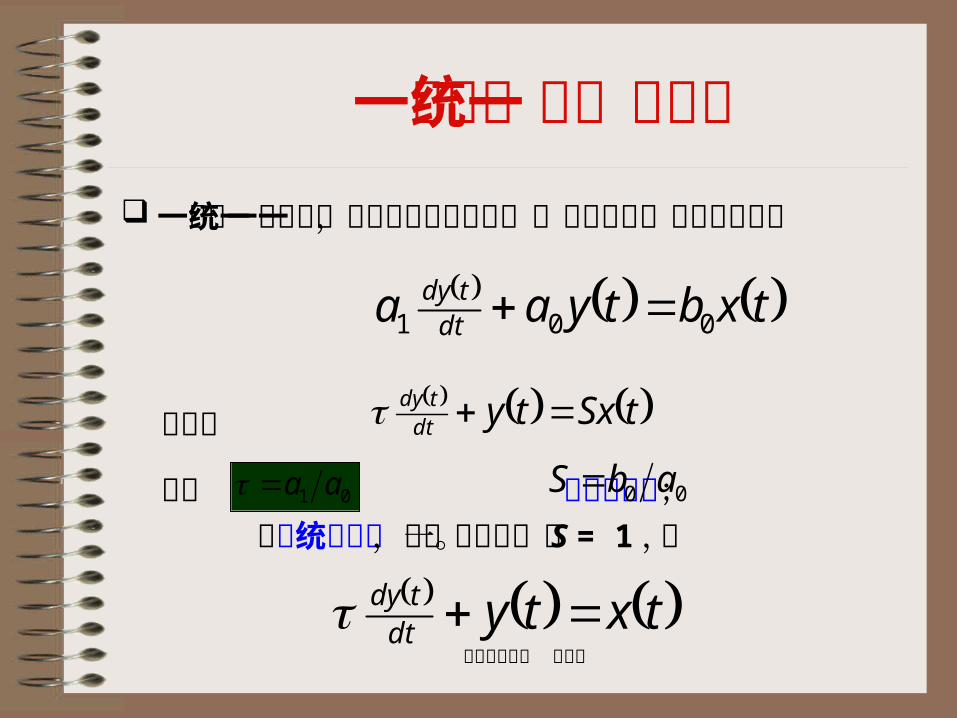
一阶系统的一般形式 一阶系统均可用一阶微分方程来描述,一般形式的一阶微分方程为
txbtyaa dttdy
001
tSxtydttdy 改写为
式中 为时间常数; 为系统灵敏度,是一个常数。令 S = 1 ,即
01 aa 00 abS
txtydttdy
河北科技大学 郑惠萍
一阶系统的特性 1
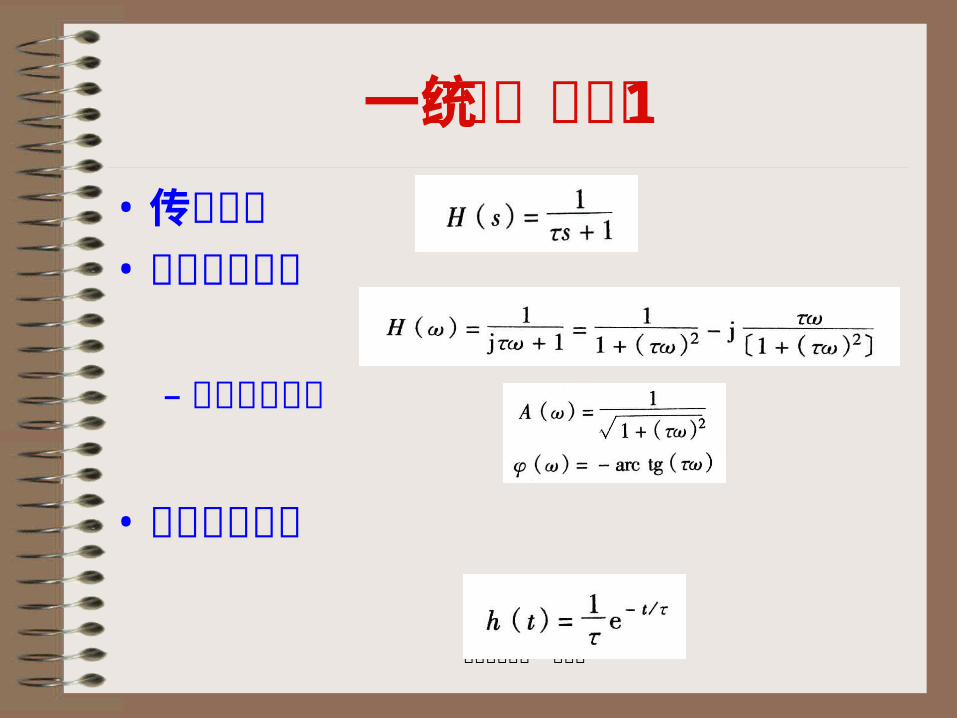
• 传递函数• 频率响应函数
– 幅相频表达式
• 脉冲响应函数
河北科技大学 郑惠萍
一阶系统的特性 2
河北科技大学 郑惠萍
一阶系统的特性 3
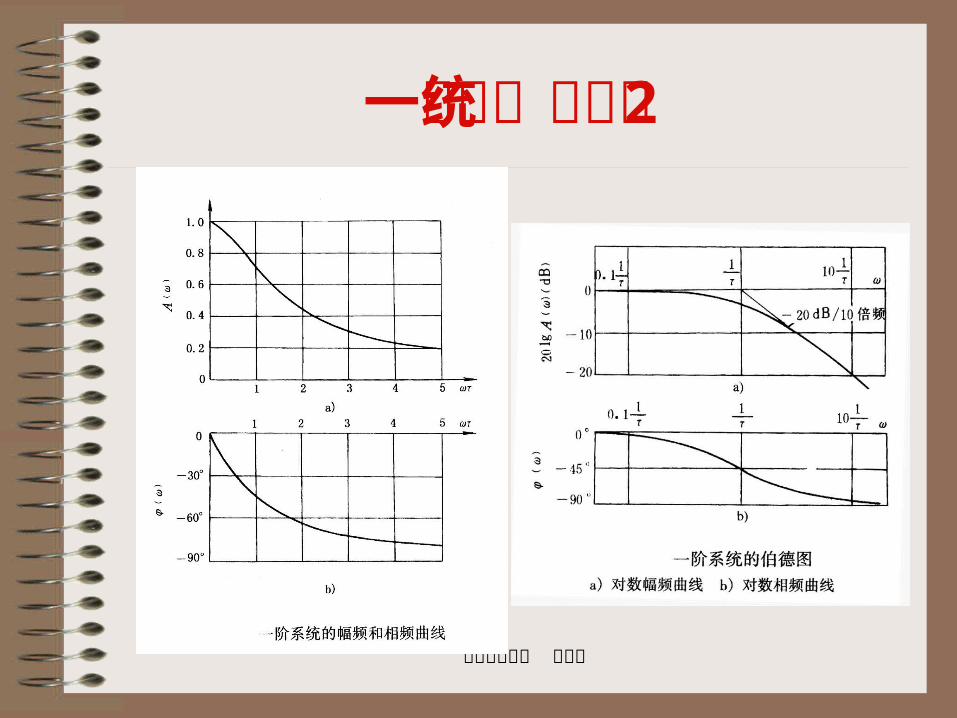
1 )当 时, ; 当 时, 。
2 )在 处, A(ω) 为 0.707 ( -3db), 相角滞后 - 4
5º 。
3 )一阶系统的伯德图可用一条折线来近似描述。这条折线在 段为 A(ω)=1, 在 段为一
-20db/10倍频斜率的直线。 点称转折频率。
1 1A 1 0A
1
1
1
1
一阶测量装置适用于测量缓变或低频的被测量时间常数 τ是一阶反映系统特性的重要参数,它决定了该装置适用的频率范围。
河北科技大学 郑惠萍
一阶系统的特性 4
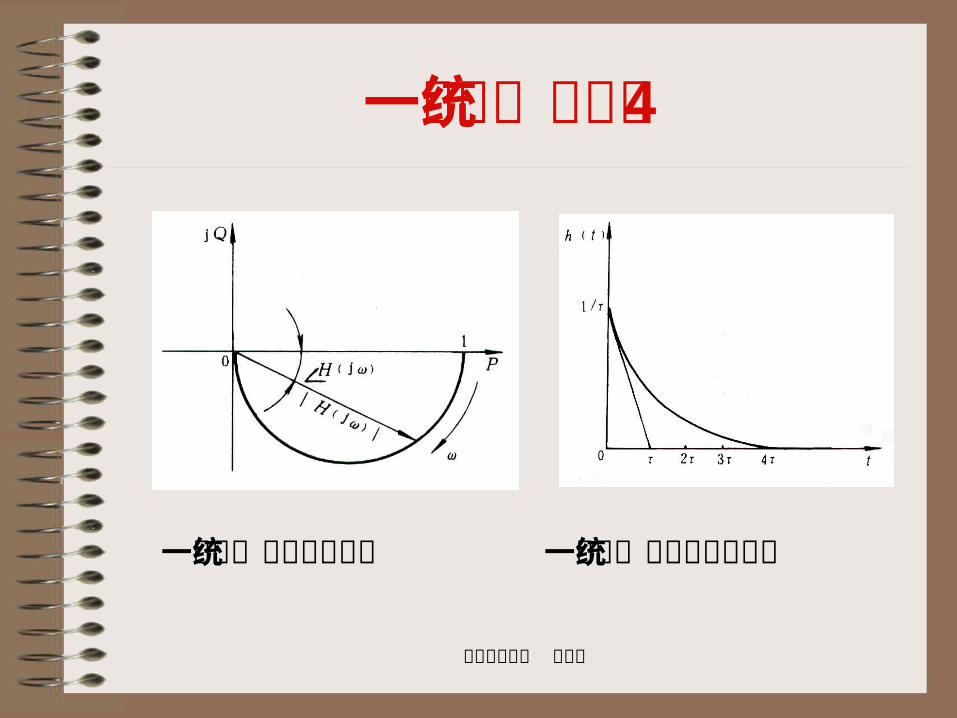
一阶系统的奈魁斯特图 一阶系统的脉冲响应函数
河北科技大学 郑惠萍
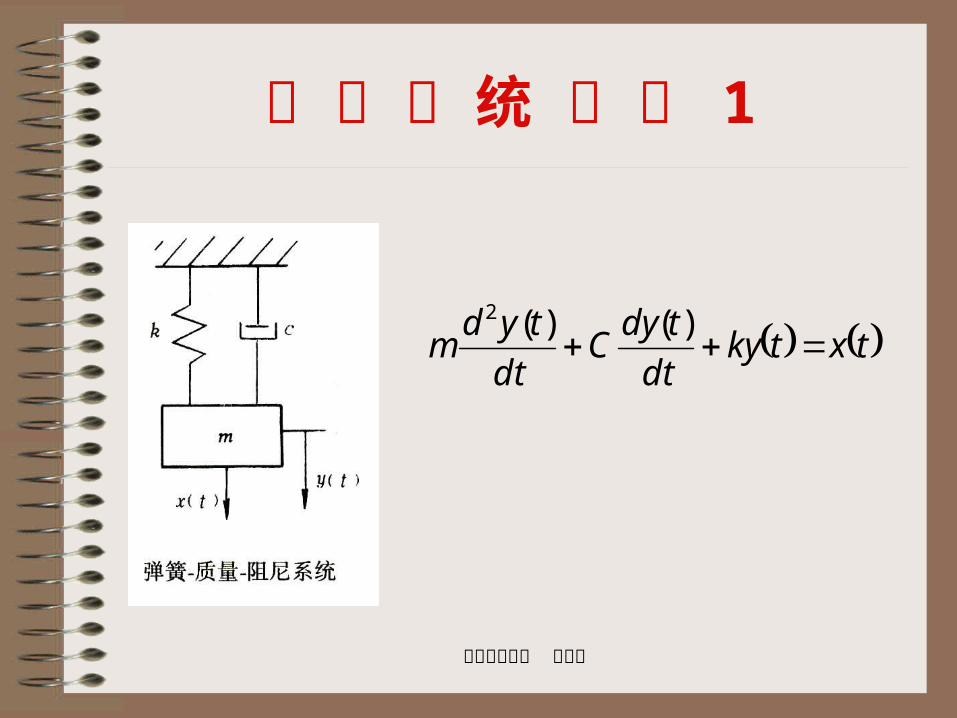
二 阶 系 统 实 例 1
txtkydt
tdyC
dt
tydm
)()(2
河北科技大学 郑惠萍
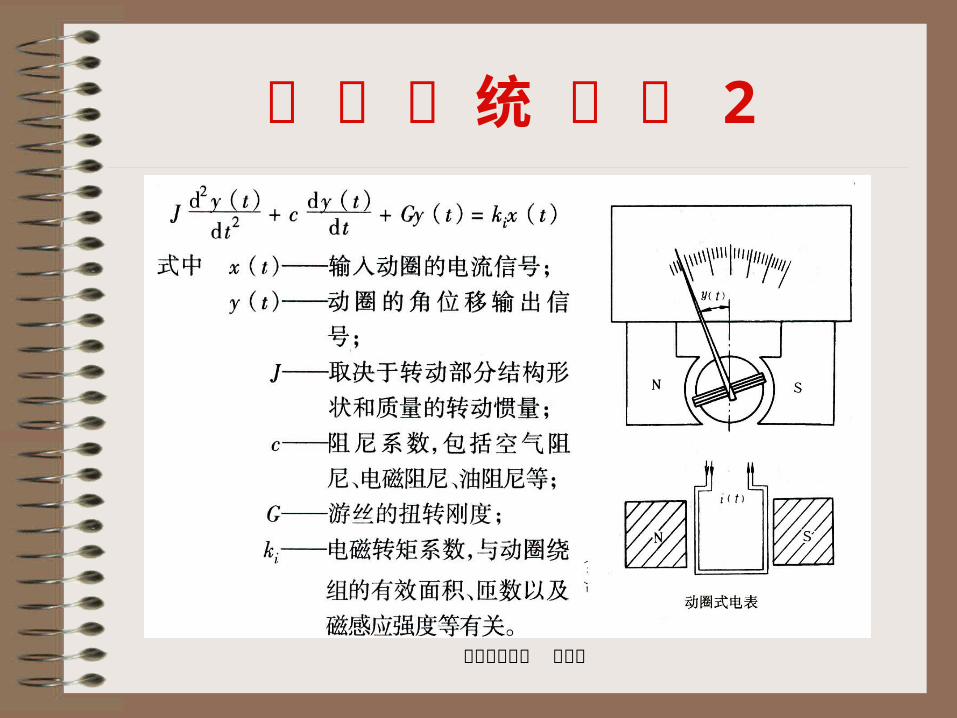
二 阶 系 统 实 例 2
河北科技大学 郑惠萍
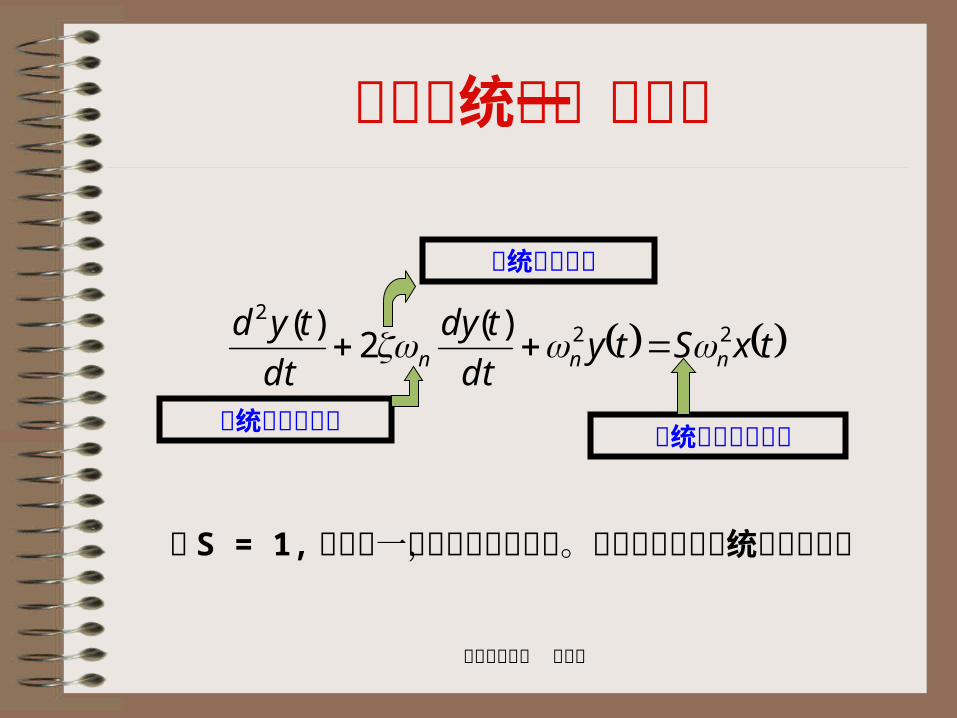
二阶系统的一般形式
txStydt
tdy
dt
tydnnn22
2 )(2
)(
令 S = 1, 得到归一化的二阶微分方程,作为研究二阶系统的标准式。
系统的固有频率 系统的静态灵敏度
系统的阻尼比
河北科技大学 郑惠萍
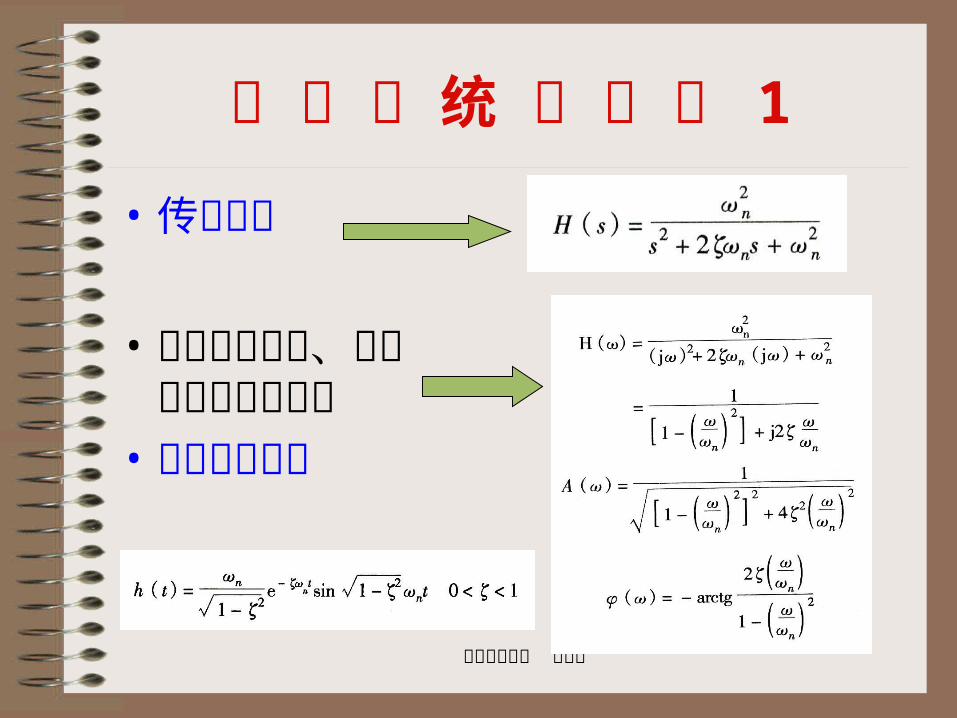
二 阶 系 统 的 特 性 1
• 传递函数
• 频率响应函数、幅频特性和相频特性
• 脉冲响应函数

河北科技大学 郑惠萍
二 阶 系 统 的 特 性 2
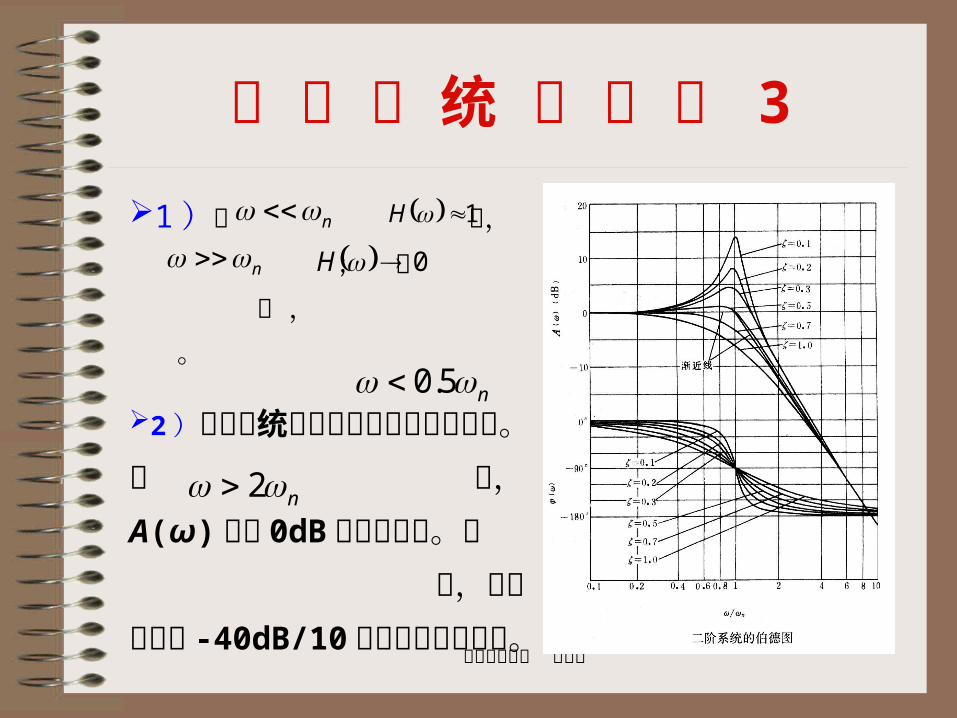
二阶系统的幅频、相频特性曲线
河北科技大学 郑惠萍
二 阶 系 统 的 特 性 3
1 )当 时, ; 当 时 , 。
2 )二阶系统的伯德图可用折线来近似。在 段,A(ω) 可用 0dB水平线近似。在 段,可用斜率为 -40dB/10倍频的直线来近似。
n 1H
n 0H
n 2
n 5.0
河北科技大学 郑惠萍
二 阶 系 统 的 特 性 4
3) 在 段, φ(ω)甚小,且和频率近似成正比增加。在 段, φ(ω)趋近于 180º ,即输出信号几乎和输入反相。在 ω靠近 区间, φ(ω)随频率的变化而剧烈变化,而且 ζ 越小,这种变化越剧烈。4 )影响二阶系统动态特性的参数是固有频率和阻尼比;在通常使用的频率中,又以固有频率的影响最为重要。固有频率的选择应以其工作频率范围为依据。 一般取
n n
n
n 8.0~6.0 7.0~65.0
河北科技大学 郑惠萍
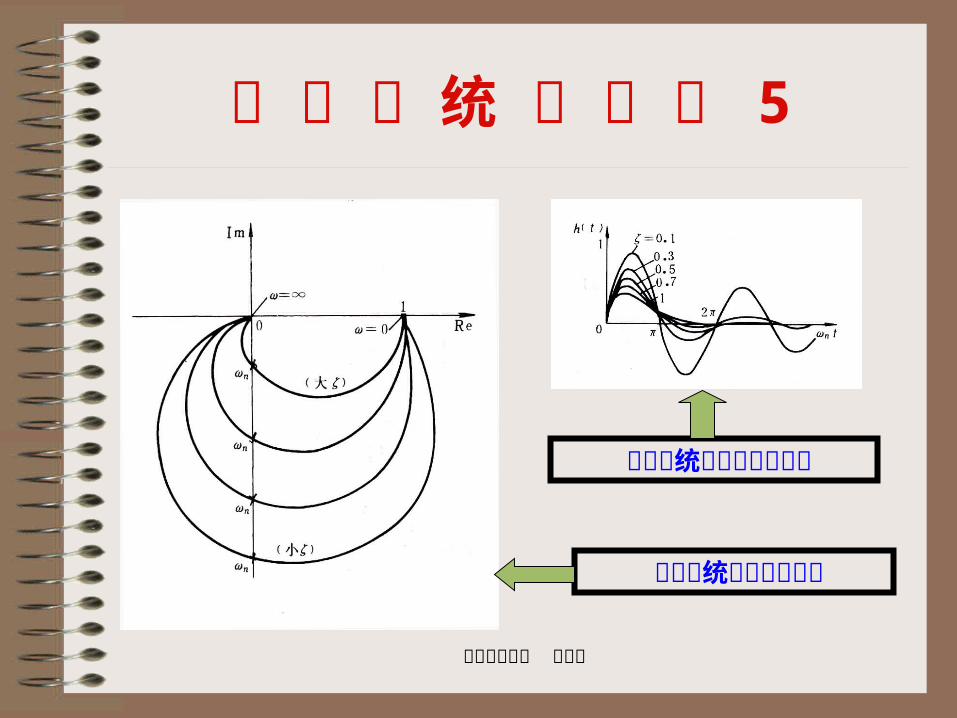
二 阶 系 统 的 特 性 5
二阶系统的脉冲响应函数
二阶系统的奈魁斯特图
THE END