主動式 rfid 室內定位追蹤演算法與系統設計 design of indoor positioning and tracking...
Post on 19-Dec-2015
261 views
TRANSCRIPT

1
主動式 RFID 室內定位追蹤演算法與系統設計Design of Indoor positioning and Tracking algorithm and
system based on Active RFID Technology
Speaker: Kung Che-Chen 龔哲幀 Advisor : Dr. Ke Kai-Wei 柯開維 博士 Date : 07/27/2010
2
Outline
• Motivation• Background• Proposed Indoor Positioning &
Tracking• System Design• Results and Analysis• Conclusion• Demo

3
Motivation
• 隨著全球無線行動通訊的蓬勃發展,促使無線通訊定位技術突飛猛進。無線通訊定位技術最廣泛使用的便是全球定位系統 (GPS) ,但 GPS 如遭到障礙物的阻擋便會產生定位誤差,甚至是無法進行定位,所以較不適用於室內定位。而室內定位近年來許多學者使用了不同無線通訊技術進行研究,但因環境與實際應用的考量,尚未有一個廣泛使用的技術。
4
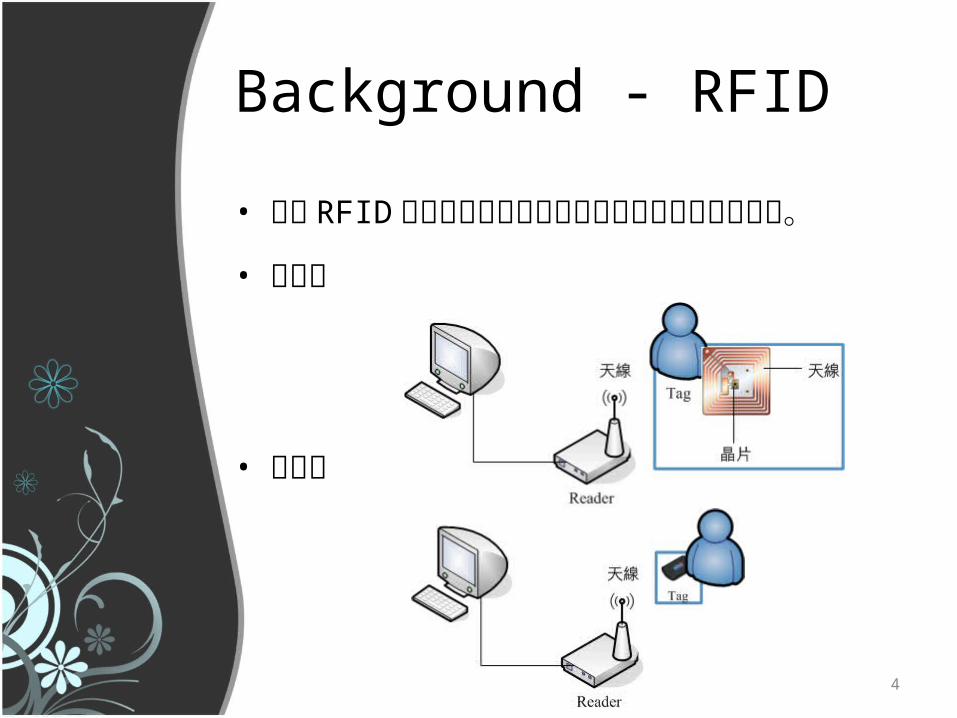
Background - RFID
• 使用 RFID 技術進行室內定位是近年來提出較新穎的技術。
• 被動式
• 主動式

5
Background - Measurement Principles of Wireless Positioning System
• 以目前在無線環境下進行定位大致有以下四種方法:
1. 接收信號角度定位法 (Angle of Arrival ; AOA)2. 訊號抵達時間定位法 (Time of Arrival ; TOA)3. 訊號抵達時間差定位法 (Time Difference of Arrival ; TDOA)4. 接收訊號強度定位法 (Received Signal Strength indicator ; RSSI)

6
Background - Measurement Principles of Wireless Positioning System
• 接收訊號強度指標定位法 (RSSI)
透過訊號強度和已知的頻道衰弱模型來估計參考點與待測點的距離,根據多個距離值就可以利用類似 TOA 定位法原理得到待測點的位置。
Reader 2
Reader 3
Reader 1 Tag

7
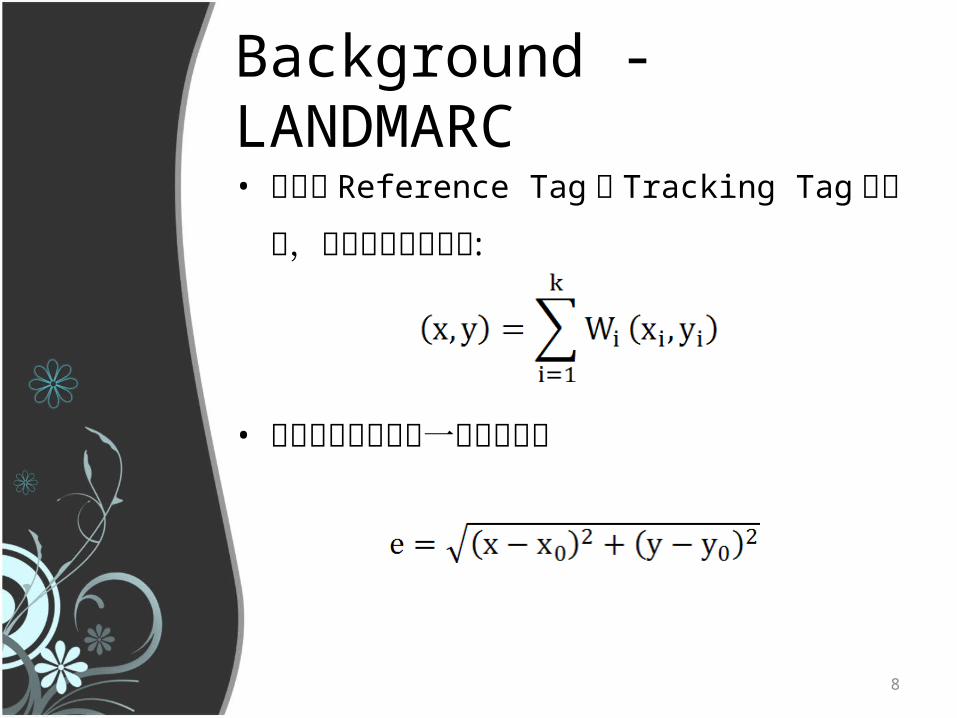
Background - LANDMARC• 由 Lionel M.Ni 在 2003 年提出,對於每
個別的 Tracking Tag 與某一 Reference Tag 之間,得到一個訊號強度的歐基里得距離 :
• 選擇 k (1~m) 個數值較小的 Reference Tags 與Tracking Tag 間的距離關係得到不同的權限值 :
8
Background - LANDMARC• 得到各 Reference Tag 對 Tracking Tag 的權重,
便可計算出其座標 :
• 在此系統也定義了一個定位誤差
9
Proposed Indoor Positioning & Tracking
• 採用 RSSI 。
• 提出– Virtual Tag 。
– 2 種訊號處理法。
– 智慧型參考點選擇機制。
– 多重區域分割概念增加定位精準度。
10
System Design
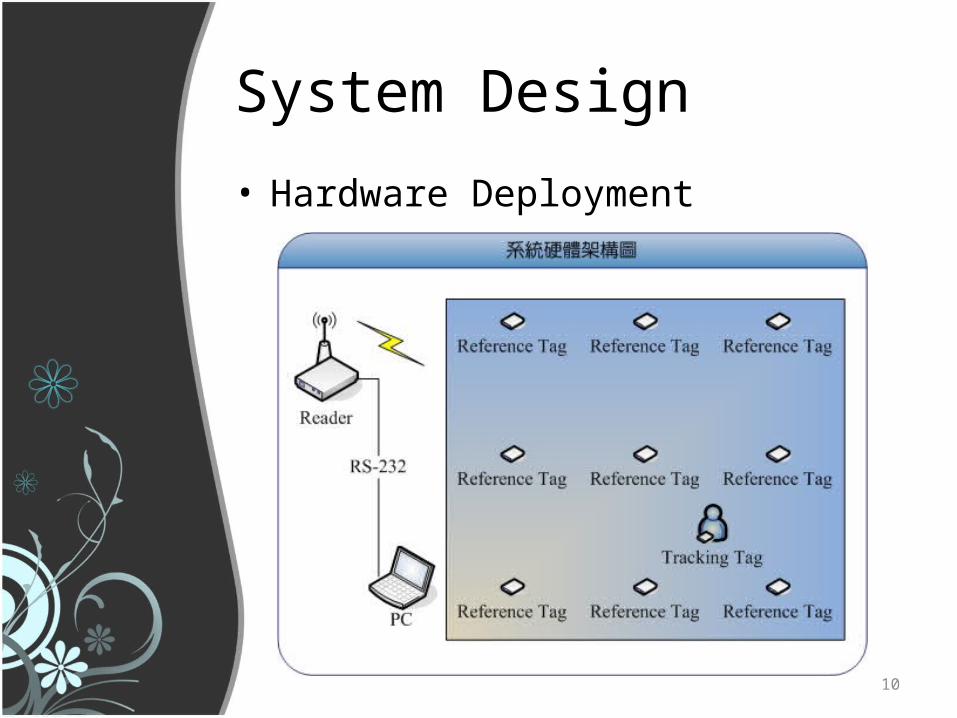
• Hardware Deployment

11
System Design• Software Flowchart( 一 )

12
System Design• Software Flowchart( 二 )
13
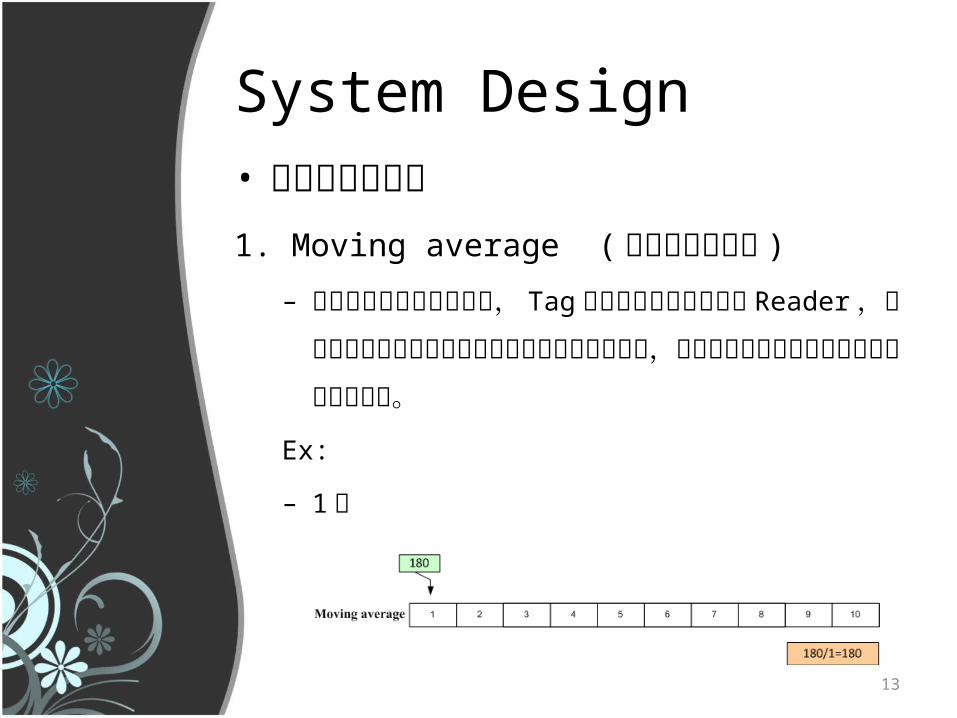
System Design• 訊號強度處理法1. Moving average ( 移動視窗平均法 )
– 在接收訊號強度的過程中, Tag 的訊號強度會不斷送給 Reader ,本平均法只保留接收到最新的十個訊號強度做平均,未滿十個則以有多少個訊號強度就平均多少。
Ex:
– 1 個

14
System Design– 5 個
– 10 個
– 超過 10 個

15
System Design2. Segmenting average ( 分割視窗平均法 )
– 每當接受到一個新的訊號強度,便與前一個接收到的作平均
Ex:
Segmenting average
179
179
1
2
3

16
System Design• Virtual tag group-based RFID positioning
( 虛擬標籤群組定位法 )– 流程圖

17
System Design• Ex:
– 16 Reference Tag– 1 Reader
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
Reference TagTracking TagReader
設定各個 Group

18
System Design
如果選到的鄰近參考點如右圖 =>
如果選到的鄰近參考點<= 如左圖
19
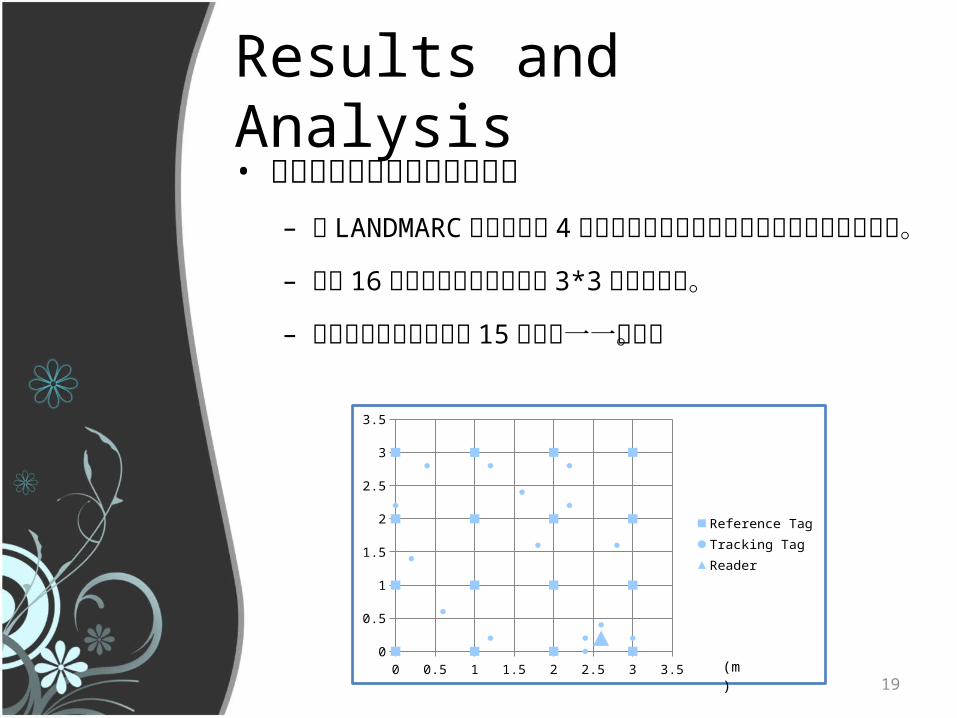
Results and Analysis• 鄰近參考點數對定位點之影響
– 在 LANDMARC 中提到選擇 4 個訊號最接近定位點的參考點會得到最佳結果。
– 設置 16 個參考點均勻的放置在 3*3 公尺的空間。
– 隨機把定位點分別至於 15 個位置一一量測。
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
Reference TagTracking TagReader
(m)
20
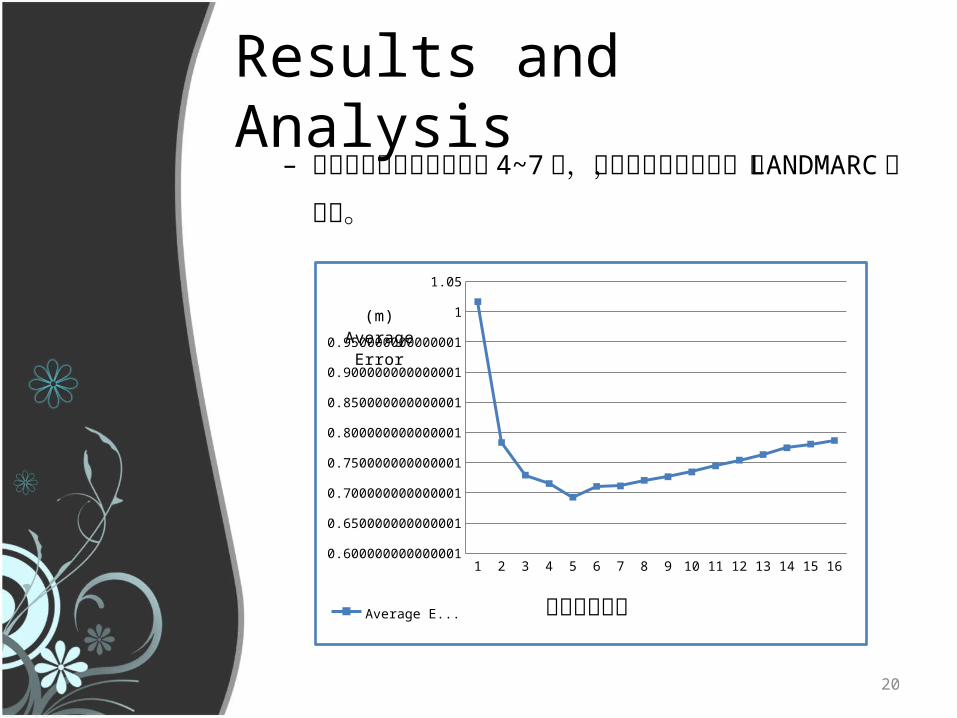
Results and Analysis– 當選擇的鄰近參考點數在 4~7 時,有最小的平均誤
差,與 LANDMARC 相吻合。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 160.600000000000001
0.650000000000001
0.700000000000001
0.750000000000001
0.800000000000001
0.850000000000001
0.900000000000001
0.950000000000001
1
1.05
Average Error 鄰近參考點數
(m)Average Error

21
Results and Analysis• 距離對訊號強度分析
– 理論上, Tag 與 Reader 之間隨著距離的增加,訊號強度會隨之衰減。
– 實際量測在一個室內的長廊,以 1 公尺為單位從 1
公尺量測至 15 公尺。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
RSSI
180.47
175 156.37
139.37
152.31
148.97
146.44
141.28
139.99
126 134.02
133.25
132.01
128.01
130.2
105
115
125
135
145
155
165
175
185
距離與訊號強度關係圖
Distance(m)
RSSI

22
Results and Analysis– 針對 4 個方向、相同距離作實際的測量,以每 1 公
尺為單位分別從 1 公尺量測至 4 公尺。
1
1
1
1 2
2
2
2 3
3
3
3
4
4 (m)4
4
RSSI 145 157 162 178 193 167 154 146 RSSI

23
Results and Analysis• 實體參考點與虛擬參考點定位精準度 (單區 )
– 本研究使用兩種佈局,實測使用實體與虛擬參考點的定位誤差。
– 佈局一• 4 個參考點設置於 2*2 公尺空間中的角落。
• Reader 設置參考點區域外 1 公尺處。
• 定位點隨機取 4 個位置。
0 2 4 6 8 10 12 14 160
2
4
6
8
10
12
Reference TagTracking TagReader
Case 1

24
Results and Analysis• 實體與虛擬參考點佈局一之平均誤差比較
Latest RSSI Moving average Segmenting average0
0.2
0.4
0.6
0.8
1
1.2 1.05250.86500000000000
20.9350.915
0.8525 0.805
Real
Virtual訊號強度處理法
(m)Average Error

25
Results and Analysis– 佈局二
• 六個參考點均勻設置於 2*1 公尺空間中。
• Reader 設置參考點區域外 1 公尺處。
• 定位點隨機取 4 個位置。
0 2 4 6 8 10 12 14 160
1
2
3
4
5
6
Reference TagTracking TagReader
Case 2

26
Latest RSSI Moving average Segmenting average
0.620.640.660.68
0.70.720.740.760.78
0.70750.677500000
000002
0.700000000000001
0.7175
0.695
0.777500000000001
RealVirtual 訊號強度處理法
(m)Average Error
Latest RSSI Moving average Segmenting average
0.70.720.740.760.78
0.80.820.840.860.88
0.88
0.771250000000002
0.81750.816250.773750000
0000020.79125
RealVirtual 訊號強度處理法
(m)Average Error
Results and Analysis• 實體與虛擬參考點佈局二之平均誤差比較
• 實體與虛擬參考點綜合平均誤差比較
27
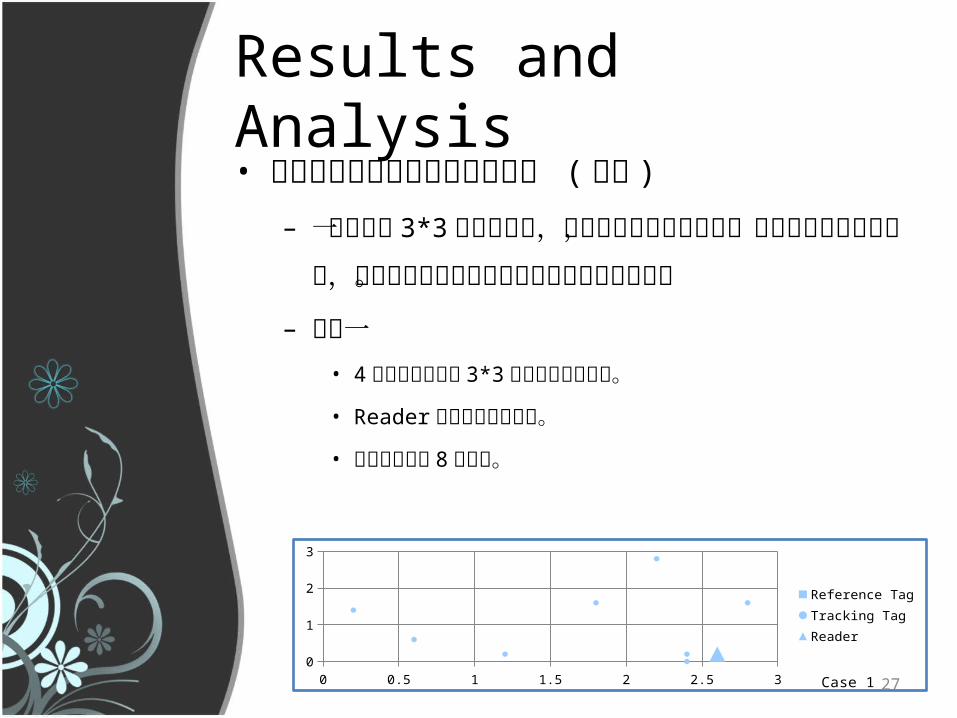
Results and Analysis• 參考點密度對定位精準度之影響 (單區 )
– 一個相同的 3*3 公尺區域中,分別使用兩種佈局方式,實測相同的大小區域中,使用不同數量的參考點對定位精準度之影響。
– 佈局一• 4 個參考點設置於 3*3 公尺空間中的角落。
• Reader 設置參考點區域內。
• 定位點隨機取 8 個位置。
0 0.5 1 1.5 2 2.5 30
0.51
1.52
2.53
Reference TagTracking TagReader
Case 1
28
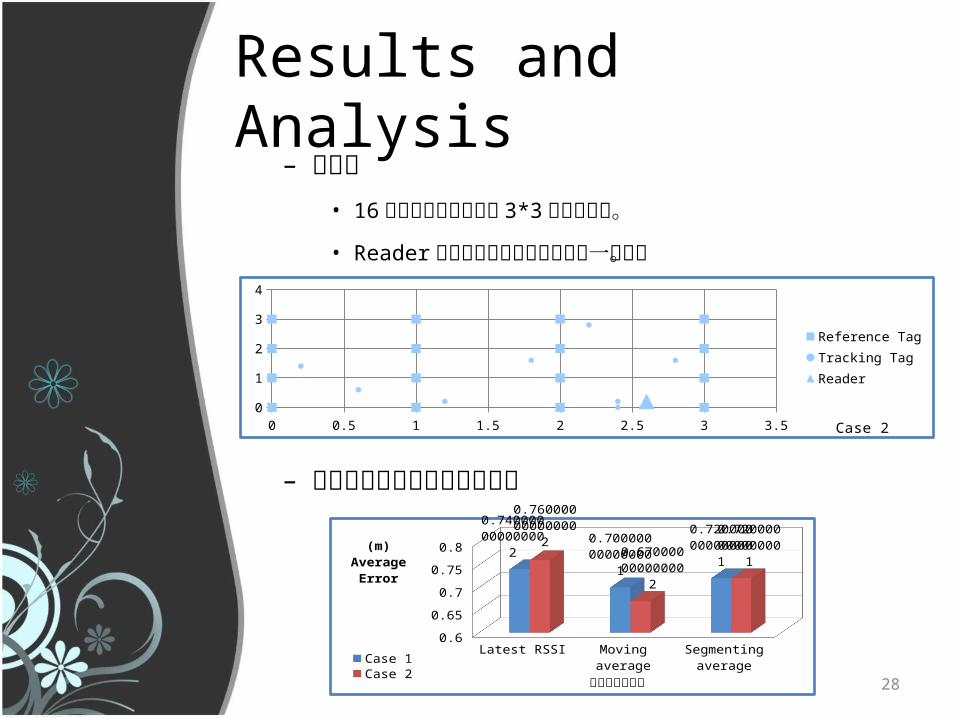
Results and Analysis– 佈局二
• 16 個參考點均勻設置於 3*3 公尺空間中。
• Reader 位置與定位點位置取與佈局一相同。
– 參考點密度綜合平均誤差比較
0 0.5 1 1.5 2 2.5 3 3.50
0.51
1.52
2.53
3.5
Reference TagTracking TagReader
Case 2
Latest RSSI Moving average Segmenting average0.620.640.660.68
0.70.720.740.76
0.740000000000002
0.700000000000001
0.720000000000001
0.760000000000002
0.670000000000002
0.720000000000001
Case 1Case 2 訊號強度處理法
(m)Average Error
29
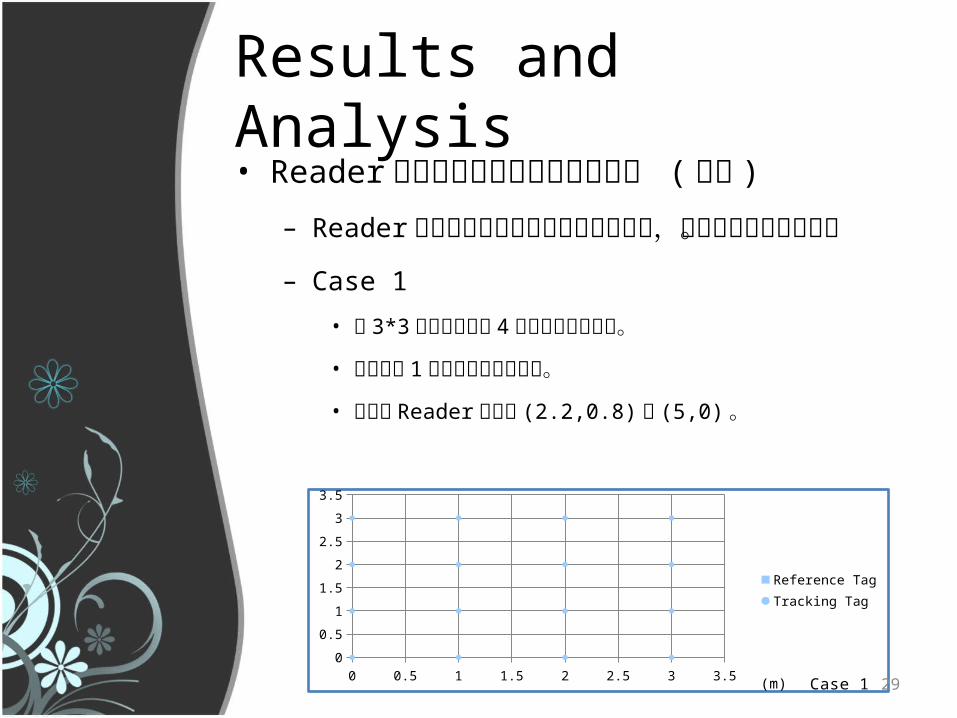
Results and Analysis• Reader擺放位置對定位精準度之影響 (單
區 )
– Reader擺放位置的不同是否會影響精準度,實測了兩種佈局方法。
– Case 1
• 在 3*3 公尺空間中的 4 個角落設置參考點。
• 定位點以 1 公尺為單位均勻擺放。
• 分別把 Reader 設置於 (2.2,0.8) 與 (5,0) 。
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
Reference TagTracking Tag
(m) Case 1

30
Results and Analysis• Reader 設置位置於 Case1綜合平均誤差比較
Latest RSSI Moving average Segmenting average
(2.2,0.8) 1.11822 1.11759 1.11572
(5,0) 1.51125 1.50188 1.50313
0.1
0.3
0.5
0.7
0.9
1.1
1.3
1.5
1.11822 1.11759 1.11572
1.51125 1.50188 1.50313
訊號強度處理法
(m)Average Error

31
Results and Analysis– Case 2
• 在 2*2 公尺空間中以 1 公尺為單位均勻設置參考點。
• 定位點隨機取 5 點。
• 分別把 Reader 設置於 ((15,0) 、 (25,0) 、 (45,0)
與 (7,7) 。
0 2 4 6 8 10 120
2
4
6
8
10
12
Reference TagTracking Tag
/ 5 (m)Case 2

32
Results and Analysis– Reader 設置位置於 Case2綜合平均誤差比較
Latest RSSI Moving average Segmenting average
(15,0) 1.15 1.14 0.94
(25,0) 0.83 0.80 0.73
(45,0) 0.90 0.96 0.80
(7,7) 0.68 0.66 0.74
0.1
0.3
0.5
0.7
0.9
1.1
1.15 1.14
0.94
0.83 0.800.73
0.900.96
0.80
0.68 0.660.74
訊號強度處理法
(m)Average Error

33
Results and Analysis• 隔牆周圍增加參考點對定位精準度之影響
( 多區 )
– 所謂多區是指由很多個單區所組成的狀況,必須把隔牆造成的定位誤差考慮進去,把多區裡全部的參考點或者不同區的參考點納入定位計算,將為造成定位誤差。
– 本實驗在同一個多區的環境下,佈局兩種方式。

34
Results and Analysis– 佈局一
• 被牆隔出兩個區域,在上方的區域設置 4 個參考點,下方的區域設置 4 個參考點。
• Reader 設置在下方的參考點區域中。
• 隨機選擇 9 個定位點。

35
Results and Analysis– 佈局二
• 本佈局被牆隔出兩個區域,上、下方的區域除了佈局一各4 個參考點外,在隔牆的周圍附近,額外各增加 4 個參考點。
• Reader 設置在下方的參考點區域中。
• 選擇與佈局一相同之定位點。

36
Results and Analysis• 隔牆綜合平均定位誤差比較
A N
佈局一 1.062222 1.027778
佈局二 0.963332999999998 0.872593
0.1
0.3
0.5
0.7
0.9
1.1
1.062222 1.0277780.963332999999998
0.872593
訊號強度處理法
(m)Average Error
37
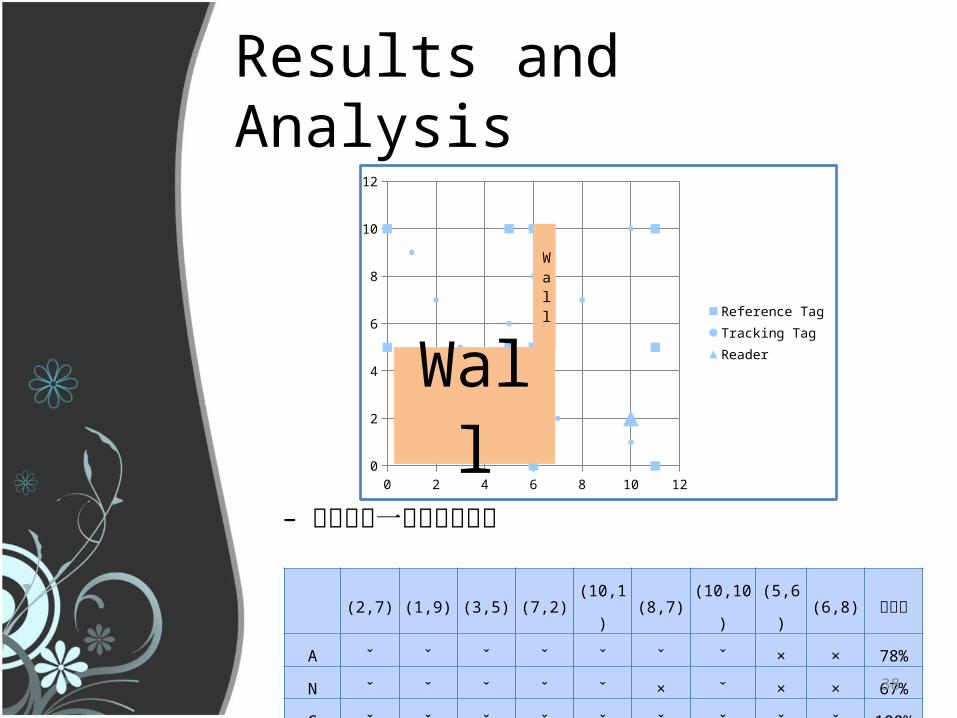
Results and Analysis• 使用虛擬標籤群組定位法增加定位精準度
( 多區 )
– 佈局兩種方式,實測使用虛擬標籤群組定位法是否增加定位精準度。
– 佈局一• 本佈局被牆隔出兩個區域,在左邊的區域設置 4 個
參考點,右邊的區域設置 6 個參考點。
• Reader 設置在右邊的區域中。
• 隨機選擇 9 個定位點。
38
Results and Analysis
– 隔牆佈局一定位區域判別0 2 4 6 8 10 12
0
2
4
6
8
10
12
Reference TagTracking TagReader
Wall
Wall
(2,7) (1,9) (3,5) (7,2)(10,1
)(8,7)
(10,10
)
(5,6
)(6,8) 成功率
A ˇ ˇ ˇ ˇ ˇ ˇ ˇ × × 78%
N ˇ ˇ ˇ ˇ ˇ × ˇ × × 67%
G ˇ ˇ ˇ ˇ ˇ ˇ ˇ ˇ ˇ 100%

39
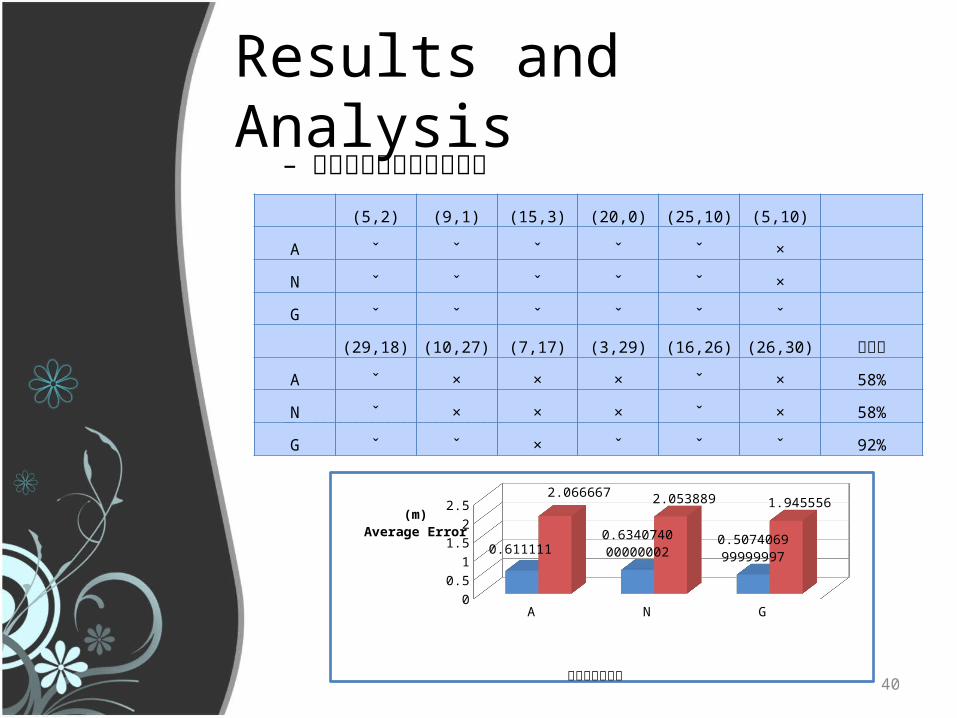
Results and Analysis– 佈局二
• 本佈局被牆隔出兩個區域,上方是一個空曠的走道設置 6 個參考點,下方是一個教室的空間設置 6 參考點,教室中含有桌椅。
• Reader 設置在下方參考點區域中。
• 隨機選擇 12 個定位點進行定位誤差分析。
40
Results and Analysis– 隔牆佈局二定位區域判別
– 隔牆綜合定位平均誤差比較
(5,2) (9,1) (15,3) (20,0) (25,10) (5,10)
A ˇ ˇ ˇ ˇ ˇ ×
N ˇ ˇ ˇ ˇ ˇ ×
G ˇ ˇ ˇ ˇ ˇ ˇ
(29,18) (10,27) (7,17) (3,29) (16,26) (26,30) 成功率
A ˇ × × × ˇ × 58%
N ˇ × × × ˇ × 58%
G ˇ ˇ × ˇ ˇ ˇ 92%
A N G
佈局一 0.611111 0.634074000000002
0.507406999999997
佈局二 2.066667 2.053889 1.945556
0.250.751.251.752.25
0.6111110.63407400
0000002 0.507406999999997
2.066667 2.053889 1.945556
訊號強度處理法
(m)Average Error
41
Conclusion• 實測單區的情況下,得到幾點結論:
– 使用虛擬參考點與實體有差不多的定位精準度,虛擬參考點反而比實體參考點節省成本,且佈局也較方便美觀。
– 使用較多的參考點,假如未使用訊號強度處理法,會導致平均定位誤差增大。
– Reader 設置於定位區域內,擁有較高定位精準度。
– Reader天線朝上,擁有較高定位精準度。
– 環境中有人員走動會影響定位精準度。
– 使用虛擬標籤群組定位法確實能增加定位精準度。
42
Conclusion• 實測多區的情況下,得到幾點結論:
– 隔牆周圍使用較多的參考點能增加定位精準度。
– 使用虛擬標籤群組定位法確實能增加定位精準度與定位區域判別成功率。

43
Demo

44
Demo
Demo
Q&A
Thanks for your attention
45