带中点电位平衡的 vienna
TRANSCRIPT
第
5
期
随着电动汽车产业的快速发展,近几年来国家
相继出台若干举措,大力推广电动汽车充电桩的建
设。 电动汽车充电桩主要由前级
AC鄄DC
整流电路
和后级
DC鄄DC
降压电路构成, 但当前大多数研究
主要集中在后级
DC鄄DC
如何实现充电控制规律、
如何加快充电速度等方面,对前级引起的谐波污染
还需要进一步引起重视
[1]
,因此,研究高功率因数、
高电能质量的前级整流器刻不容缓。
VIENNA
整流器作为一种三电平整流器拓扑,
收稿日期:
2019鄄07鄄09
;录用日期:
2019鄄08鄄21
基金项目:校级重点科研资助项目(
2019KJ41
);宁夏高等学校
一流学科建设(电子科学与技术学科)资助项目(
NXYLXK2017
A07
);
2019
年宁夏重点研发计划(沿黄试验区科技创新专项)
资助项目(
2019BDE03010
)
Project Supported by Key Research Projects at School Level
(
2019
KJ41
)
; First鄄class Discipline Construction of Ningxia Universities
(
Electronic Science and Technology Discipline
)
Subsidy Project
(
NXYLXK2017A07
)
; Key Research and Development Plan of
Ningxia in 2019
(
Science and Technology Innovation Project along
the Yellow River Experimental Zone
)(
2019BDE03010
)
带中点电位平衡的 VIENNA整流器反推控制研究
王君瑞,贾思宁,向 上,王 闯,单 祥,李学生
(北方民族大学电气信息工程学院,银川
750021
)
摘要:由于
VIENNA
整流器具有强耦合及非线性的特点,在建立
VIENNA
整流器
d鄄q
坐标系数学模型的基础
上,采用反推控制策略实现对于直流电压以及
d鄄q
轴电流的控制。将基于两电平空间矢量脉宽调制
SVPWM
(
space
vector pulse width modulation
)的简化算法移植到
VIENNA
整流器中,分析了
VIENNA
整流器
SVPWM
工作原理,并
在此基础上采用软件算法调整
P
、
N
小矢量的作用时间,实现中点电位的平衡。 最后,利用
Matlab/Simulink
软件搭
建仿真平台,验证所提控制策略的合理性以及有效性。 在中点电位平衡作用下,与传统的
PI
控制相比,反推控制增
加了输出直流电压的稳定性,改善了电流谐波,并进一步提高了功率因数,使得
VIENNA
整流器有更好的动态响应
性能。
关键词:
VIENNA
整流器;简化
SVPWM
;反推控制;中点电位平衡;
Matlab/Simulink
Research on Backstepping Control of VIENNA Rectifier Based on
Neutral鄄point Potential Balance
WANG Junrui, JIA Sining, XIANG Shang, WANG Chuang, SHAN Xiang, LI Xuesheng
(
School of Electrical and Information Engineering, North Minzu University, Yinchuan 750021,China
)
Abstract
:
Owing to the strong coupling and non鄄linearity characteristics of a VIENNA rectifier, on the basis of es鄄
tablishing its d鄄q coordinate axis mathematical model, the backstepping control strategy is adopted to realize the control
of DC voltage and d鄄q axis current. A simplified algorithm based on two鄄level space vector pulse width modulation
(
SVP鄄
WM
)
is transplanted into the VIENNA rectifier, and the working principle for the space vector modulation of the VIEN鄄
NA rectifier is analyzed, based on which a software algorithm is used to adjust the action time of small vectors P and N
to achieve the neutral鄄point potential balance. Finally, a simulation platform is built using Matlab/Simulink to verify the
rationality and effectiveness of the proposed control strategy. Compared with the traditional PI control, the backstepping
control increases the stability of output DC voltage, improves the current harmonics, and further improves the power fac鄄
tor under the neutral鄄point potential balance, which makes the VIENNA rectifier have a better dynamic performance.
Keywords: VIENNA rectifier; simplified SVPWM; backstepping control; neutral鄄point potential balance; Matlab/
Simulink
DOI
:
10.13234/j.issn.2095鄄2805.2021.5.1
中图分类号:
TM461
文献标志码:
A
电 源 学 报
Journal of Power Supply
Vol. 19 No. 5
Sept. 2021
第
19
卷 第
5
期
2021
年
9
月
总第
97
期
电 源 学 报
其电路结构简单, 开关数量少, 没有桥臂直通问
题,而且电流谐波小,电压应力小,器件损耗低,功
率密度高,适合大功率电路使用
[2]
。 在航空电源、电
动汽车充电机、风力发电、不间断电源及有源电力
滤波器等领域正在逐步替代传统整流器作用
[3]
。 但
是,
VIENNA
整流器的中点电位波动增加了整流器
电路中功率器件的电压应力, 降低了器件寿命以及
运行的可靠性
[4]
。 因此,研究
VIENNA
整流器中点电
位波动的控制方法非常关键。针对三电平拓扑固有
的中点电位波动问题, 国内外学者也做了大量研
究。现在主要有
2
种解决途径:一种是硬件方法,设
计专门的外部电路, 依靠
Buck
、
Boost
特性来实现
对中点电压的平衡控制; 另一种是从软件的角度
出发, 不同的控制策略对应不同的中点电压平衡
方法。 例如基于空间矢量脉宽调制
SVPWM
(
space
vector pulse width modulation
), 利用冗余的小矢量
调节其作用时间
[5]
;基于单周期控制,在三相输入电
流中注入三次谐波分量,消除中点电位波动
[6]
;基于
滞环电流控制,通过调节指令电流的直流偏移量实
现直流侧中点电压平衡控制
[7]
等。
本文提出一种非线性的控制方法———反推控
制,它不依赖于精确的数学模型,具有较好的抗扰
能力。首先,介绍了
VIENNA
整流器的拓扑,并建立
其在
d鄄q
坐标系下的数学模型,对反推控制算法进
行了简单的描述,给出了以直流电压为控制目标的
相关理论推导;其次,对本模型使用的基于两电平
SVPWM
的简化调制技术进行简要介绍, 并在此基
础上通过调节冗余
P
、
N
小矢量的控制时间, 来实
现对上、 下电容电压的控制; 最后, 利用
Matlab/
Simulink
软件搭建仿真模型,验证控制策略的正确
性和可行性。
1 VIENNA
整流器的数学模型及反
推控制器的设计
1.1 VIENNA
整流器的数学模型
1994
年,
J. W. Kolar
教授提出了一种新型的三
电平整流器(
VIENNA
整流器)拓扑。 该拓扑由二极
管整流器演化而来,三相交流源经过三相电感
L
s
及
网侧电阻
R
s
, 在
a
、
b
、
c
三相输入端和直流母线电容
中点各连接一个双向开关,形成三电平结构。双向开
关由
2
个带反并联二极管的
IGBT
共发射极反向串
联构成。
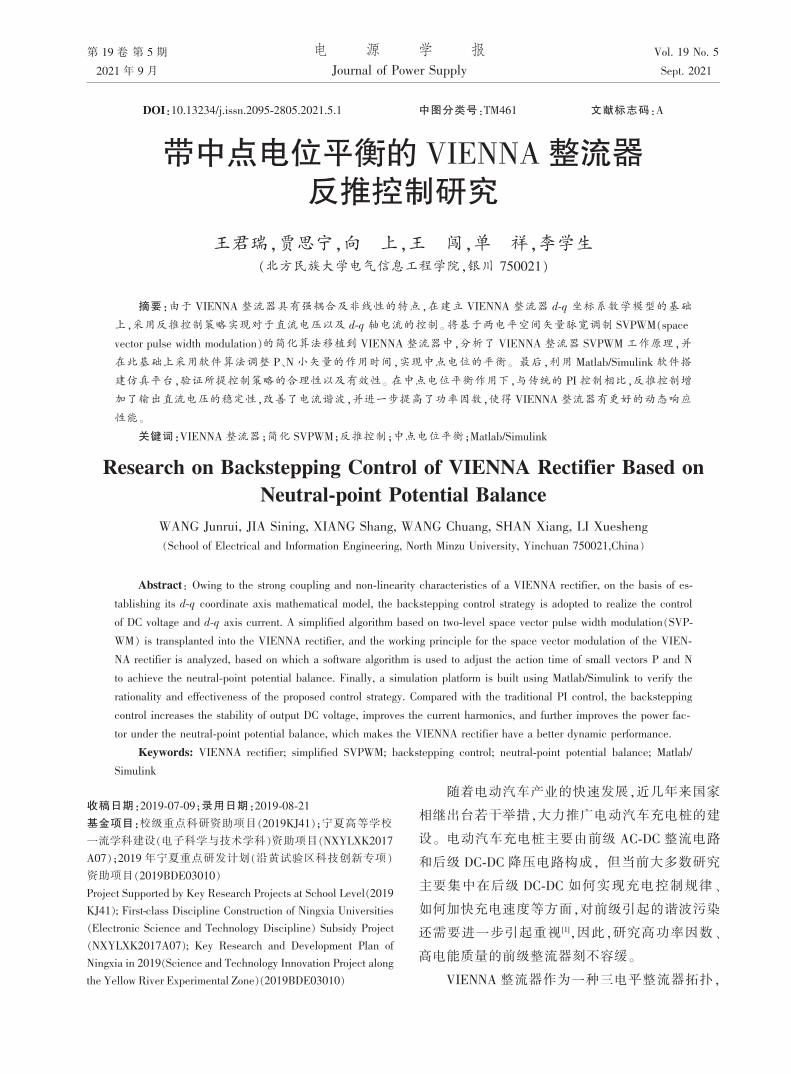
该电路是一种电流驱动型功率因数校正
PFC
(
power factor correction
)电路 ,功率开关管
S
a1
、
S
a2
、
S
b1
、
S
b2
、
S
c1
、
S
c2
两端的电压由其自身状态和输入电流
方向共同决定。 以
a
相为例,若输入电流为正,则开
关导通,开关管被箝位在直流侧正极,此时开关两端
电压
U
ao
=U
C
1
=U
dc
/2
;若输入电流为负,则开关导通,开
关管被箝位在直流侧负极,此时
U
ao
=U
C
2
=-U
dc
/2
;开关
管关断,无论电流正负,开关管被箝位在直流侧中点
O
[8]
。
VIENNA
整流器主电路拓扑如图
1
所示。
当电网处于理想平衡状态时,
VIENNA
整流器
工作在连续电流模式。根据以上工作原理,省去推导
过程, 利用旋转坐标变换将
abc
坐标系下的数学模
型转化到
d鄄q
坐标系下, 两相同步旋转
d鄄q
坐标系
下
VIENNA
整流器交流侧的电压方程
[9]
为
L
s
di
d
dt
=-R
s
i
d
+ωL
s
i
q
-V
d
+U
d
L
s
di
q
dt
=-R
s
i
q
-ωL
s
i
d
-V
q
+U
q
q
#
"
#
$
(
1
)
式中:
L
s
为交流侧输入电感;
i
d
和
i
q
分别为
d
、
q
轴电
流分量;
R
s
为交流侧电阻;
ω
为旋转角速度;
V
d
和
V
q
分别为
d
、
q
轴电压实际控制量;
U
d
和
U
q
分别为三相
电压在
d
、
q
轴上的分量。
为实现直流电压的快速控制, 若略去滤波器电
阻和主电路的开关损失, 交流侧输入功率应等于负
载功率与电容充电功率
[8]
,即
图 1 VIENNA整流器主电路拓扑
Fig. 1 Main circuit topology of VIENNA rectifier
U
a
U
b
U
c
M
L
s
R
s
L
s
R
s
L
s
R
s
D
ap
D
bp
D
cp
D
an
D
bn
D
cn
a
b
c
S
a1
S
a2
S
b1
S
b2
S
c1
S
c2
C
1
C
2
P
N
U
C
1
U
C
2
O
R
1
2
第
5
期 王君瑞,等:带中点电位平衡的
VIENNA
整流器反推控制研究
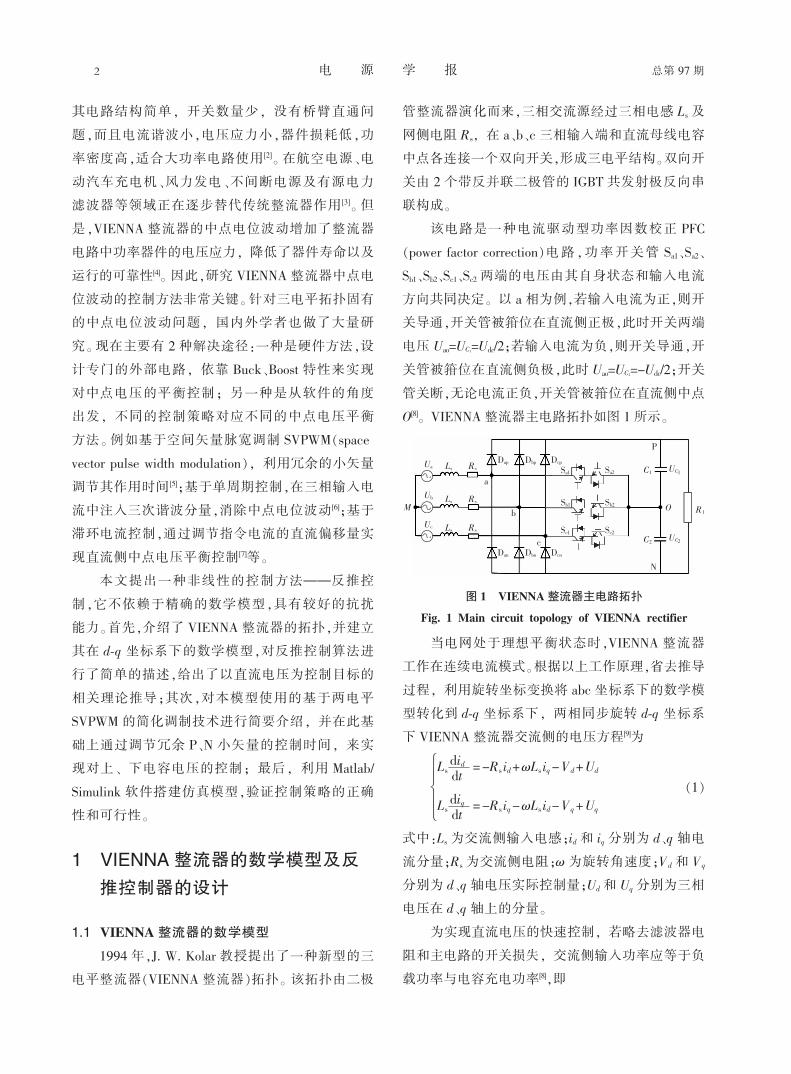
图 2 VIENNA整流器反推控制结构框图
Fig. 2 Block diagram of backstepping control structure
for VIENNA rectifier
3
2
(
U
d
i
d
+U
q
i
q
)
=U
dc
C
dU
dc
dt
+
U
2
dc
R
l
(
2
)
式中:
U
dc
为直流侧电容电压;
C
为上电容和下电容;
R
l
为负载侧电阻。
取电网电势矢量方向与
d
轴方向重合,
E
为单
相电压,则
U
d
=E
,
U
q
=0
。 在忽略网侧等效电阻的情
况下,在
d鄄q
坐标系下三相电压型
VIENNA
整流器
的方程
[9]
可以进一步表示为
L
s
di
d
dt
=-R
s
i
d
+ωL
s
i
q
-V
d
+U
d
L
s
di
q
dt
=-R
s
i
q
-ωL
s
i
d
-V
q
+U
q
dU
dc
dt
=
3E
2CU
dc
i
d
-
U
dc
R
l
C
C
#
#
#
"
#
#
#
$
(
3
)
1.2
反推控制器的设计
反推控制的设计过程是从输出量需要满足的
期望值着手,将复杂的非线性系统分解成不超过系
统阶数的子系统,然后为每个子系统设计部分
Lya鄄
punov
函数和中间虚拟控制量, 一步步反推设计到
整个控制系统,最后得到整个系统的控制器,从而
实现系统的全局稳定
[10]
。
VIENNA
整流器的目标是
实现直流侧电压平衡和单位功率因数控制,因此定
义直流侧电压跟踪误差
e
1
=U
dc
-U
*
dc
,其中,
U
*
dc
为直流
侧期望输出电压。
假定
i
d
为虚拟控制函数,首先构造出
Lyapunov
函数
V
1
=e
2
1
/2
,并对其求导,得
V
觶
1
= e
1
de
1
dt
= e
1
3E
2CU
dc
i
d
-
U
dc
R
l
C
C &
(
4
)
为了使式(
4
)恒满足条件V
觶
1
≤0
,可选择
3E
2CU
dc
i
d
-
U
dc
R
l
C
= -k
1
e
1
(
5
)
式中,
k
1
为调整参数,
k
1
>0
。 进一步可得虚拟控制函
数为
i
d
=
2CU
dc
3E
U
dc
R
l
C
-k
1
e
1
C &
(
6
)
因此,若实现该虚拟控制函数,即可达到直流侧
输出电压稳定跟踪给定电压的目的。 为了实现三相
VIENNA
整流器的电流控制,选择假定电流函数为
i
*
d
=
2CU
dc
3E
U
dc
R
l
C
-k
1
e
1
C &
i
*
q
=
C
#
"
#
$
0
(
7
)
选择
e
2
作为虚拟状态变量构成子系统。 取
d
轴
电流的误差量
e
2
=i
d
-i
*
d
,
i
*
d
为
d
轴电流分量期望值。设置
新的
Lyapunov
函数
V
2
=V
1
+e
2
2
/2
,并对其进行求导得
V
觶
2
= -k
1
e
2
1
+e
2
1
L
s
(
U
d
-R
s
i
d
+R
s
ω i
q
-V
d
)
-
- )
Q
(
8
)
式(
8
)中含有实际控制
V
d
,为了使其满足V
觶
2
≤0
,需
令(
U
d
-R
s
i
d
+R
s
ωi
q
-V
d
)
/L
s
-Q=-k
2
e
2
,调节参数
k
2
>0
,可
得实际控制为
V
d
=U
d
-R
s
i
d
+ L
s
ω i
q
+ L
s
k
2
e
2
- L
s
Q
(
9
)
式中,
Q =
2C
3E
3E
2CU
dc
i
d
-
U
dc
R
l
C
C &
2U
dc
R
l
C
-k
1
e
1
-k
1
U
dc
C &
。
同理,选择
q
轴电流的误差量
e
3
=i
q
-i
*
q
,可以设
计出其
Lyapunov
函数,得其实际控制为
V
q
=U
q
-R
s
i
q
+ L
s
ω i
d
+ L
s
k
3
e
3
(
10
)
经过以上推导过程, 反推控制调节参数
k
1
、
k
2
和
k
3
, 在理论上可根据具体的系统控制性能要求,
进行参数优化设计,但过程较为复杂,因此一般根
据经验试凑即可满足工程要求。 首先给出反推控制
一个电压(或电流)差值信号输入,有多个参数时先
进行单个参数调节,其他参数值先设置为
0
,调节
至满足目标的参数时再调节之。 本文首先对电压反
推控制调节参数
k
1
进行调节, 然后在
k
1
的基础上
调节
k
2
和
k
3
,进而完成反推控制方案的设计。
VI鄄
ENNA
整流器反推控制结构框图如图
2
所示。
。
。
。
。
。
。
。
。
。
+ -
+
-
。
U
dc
U
dc
*
虚拟控制
函数
i
d
*
i
d
i
q
i
q
=0
*
T
2s/2r
反推
控制
U
q
V
d
V
q
T
2r/3s
SVPWM
VIENNA
U
d
U
C
1
U
C
2
U
a
U
b
U
c
θ
θ
PLL
T
3s/2s
i
a
i
b
i
c
i
α
i
β
T
3s/2r
ΔU
o
U
C
1
U
C
2
3
总第
97
期
电 源 学 报
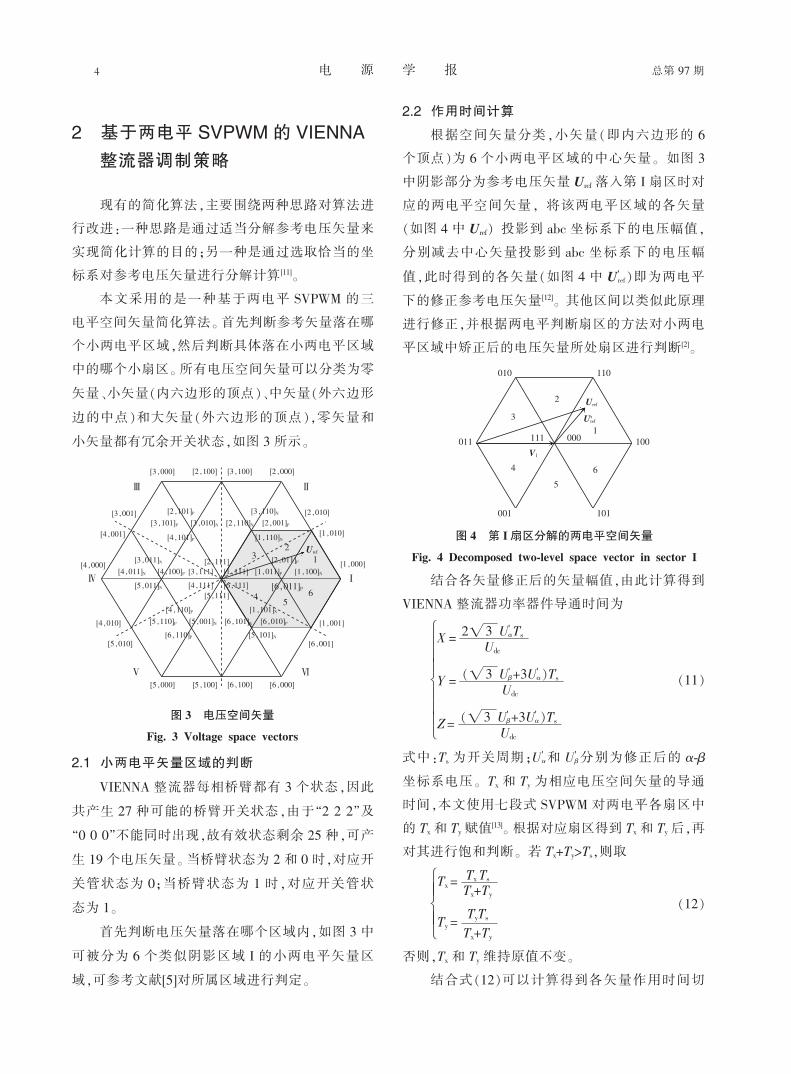
图 4 第 I扇区分解的两电平空间矢量
Fig. 4 Decomposed two鄄level space vector in sector I
010 110
001 101
011 100
2
3
4
5
6
1
000111
V
1
U
ref
U
ref
'
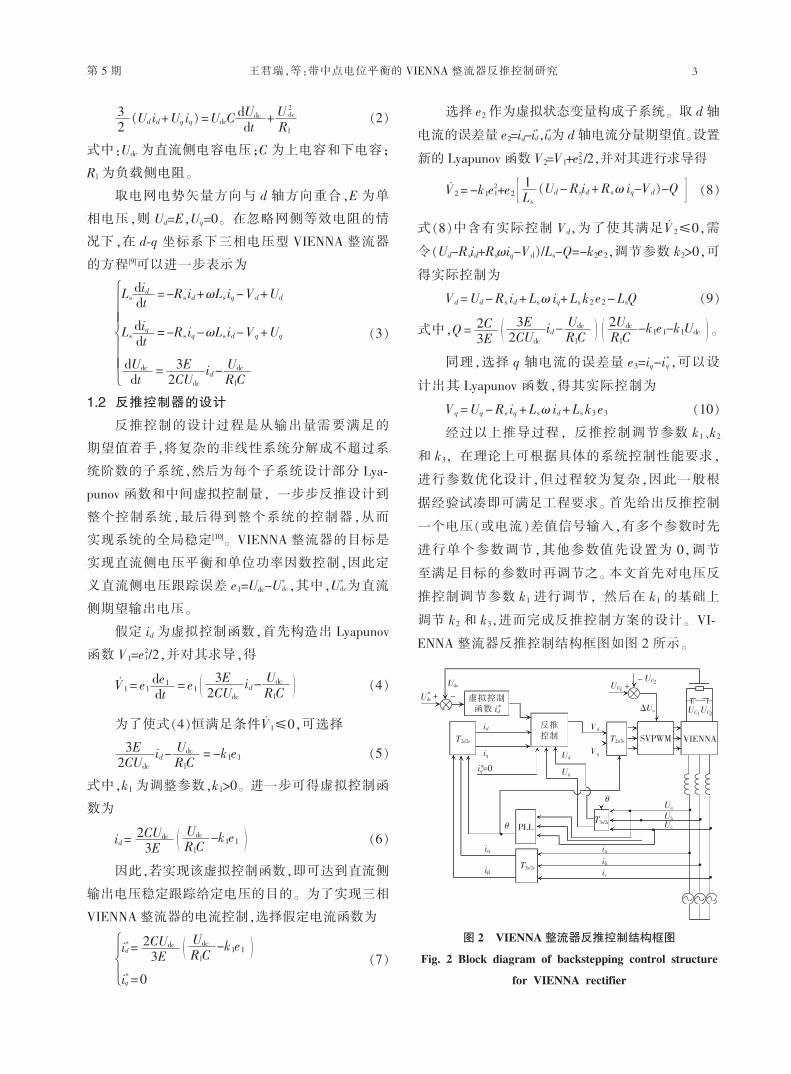
图 3 电压空间矢量
Fig. 3 Voltage space vectors
2
基于两电平
SVPWM
的
VIENNA
整流器调制策略
现有的简化算法,主要围绕两种思路对算法进
行改进:一种思路是通过适当分解参考电压矢量来
实现简化计算的目的;另一种是通过选取恰当的坐
标系对参考电压矢量进行分解计算
[11]
。
本文采用的是一种基于两电平
SVPWM
的三
电平空间矢量简化算法。 首先判断参考矢量落在哪
个小两电平区域,然后判断具体落在小两电平区域
中的哪个小扇区。 所有电压空间矢量可以分类为零
矢量、小矢量(内六边形的顶点)、中矢量(外六边形
边的中点)和大矢量(外六边形的顶点),零矢量和
小矢量都有冗余开关状态,如图
3
所示。
2.1
小两电平矢量区域的判断
VIENNA
整流器每相桥臂都有
3
个状态,因此
共产生
27
种可能的桥臂开关状态,由于“
2 2 2
”及
“
0 0 0
”不能同时出现,故有效状态剩余
25
种,可产
生
19
个电压矢量。 当桥臂状态为
2
和
0
时,对应开
关管状态为
0
;当桥臂状态为
1
时,对应开关管状
态为
1
。
首先判断电压矢量落在哪个区域内,如图
3
中
可被分为
6
个类似阴影区域
I
的小两电平矢量区
域,可参考文献
[5]
对所属区域进行判定。
2.2
作用时间计算
根据空间矢量分类,小矢量(即内六边形的
6
个顶点)为
6
个小两电平区域的中心矢量。 如图
3
中阴影部分为参考电压矢量
U
ref
落入第
I
扇区时对
应的两电平空间矢量, 将该两电平区域的各矢量
(如图
4
中
U
ref
) 投影到
abc
坐标系下的电压幅值,
分别减去中心矢量投影到
abc
坐标系下的电压幅
值,此时得到的各矢量(如图
4
中
U
ref
')即为两电平
下的修正参考电压矢量
[12]
。 其他区间以类似此原理
进行修正,并根据两电平判断扇区的方法对小两电
平区域中矫正后的电压矢量所处扇区进行判断
[2]
。
结合各矢量修正后的矢量幅值,由此计算得到
VIENNA
整流器功率器件导通时间为
X =
2 3
姨
U
'α
T
s
U
dc
Y =
( 3
姨
U
'β
+3U
'α
)
T
s
U
dc
Z =
( 3
姨
U
'β
+3U
'α
)
T
s
U
dc
c
$
$
$
#
$
$
$
%
(
11
)
式中:
T
s
为开关周期;
U
'α
和
U
'β
分别为修正后的
α鄄β
坐标系电压。
T
x
和
T
y
为相应电压空间矢量的导通
时间,本文使用七段式
SVPWM
对两电平各扇区中
的
T
x
和
T
y
赋值
[13]
。 根据对应扇区得到
T
x
和
T
y
后,再
对其进行饱和判断。 若
T
x
+T
y
>T
s
,则取
T
x
=
T
x
T
s
T
x
+T
y
T
y
=
T
y
T
s
T
x
+T
y
y
$
$
#
$
$
%
(
12
)
否则,
T
x
和
T
y
维持原值不变。
结合式(
12
)可以计算得到各矢量作用时间切
Ⅰ
ⅡⅢ
Ⅳ
Ⅴ Ⅵ
[3
,
000] [2
,
100] [3
,
100] [2
,
000]
[5
,
000] [5
,
100] [6
,
100] [6
,
000]
[3
,
001]
[4
,
001]
[2
,
010]
[1
,
010]
[2
,
101]
P
[3
,
101]
P
[3
,
010]
N
[2
,
110]
N
[3
,
110]
N
[2
,
001]
P
[4
,
101]
P
[1
,
110]
N
[4
,
000]
[1
,
000]
[3
,
011]
N
[4
,
011]
N
[4
,
100]
P
[3
,
111] [1
,
111]
[4
,
111] [6
,
111]
[2
,
111]
[5
,
111]
[2
,
011]
P
[1
,
011]
P
[1
,
100]
N
[5
,
011]
N [6
,
011]
P
[4
,
110]
P
[5
,
110]
P
[5
,
001]
N
[6
,
101]
N
[1
,
101]
N
[6
,
010]
P
[6
,
110]
P
[5
,
101]
N
[1
,
001]
[6
,
001]
[4
,
010]
[5
,
010]
6
5
4
3
2
1
U
ref
4
第
5
期
换点
t
a
、
t
b
、
t
c
,即
t
a
=
T
s
-T
x
T
y
4
t
b
=
T
x
2
+t
a
�
t
c
=
T
y
2
+t
b
b
#
#
#
"
#
#
#
$
(
13
)
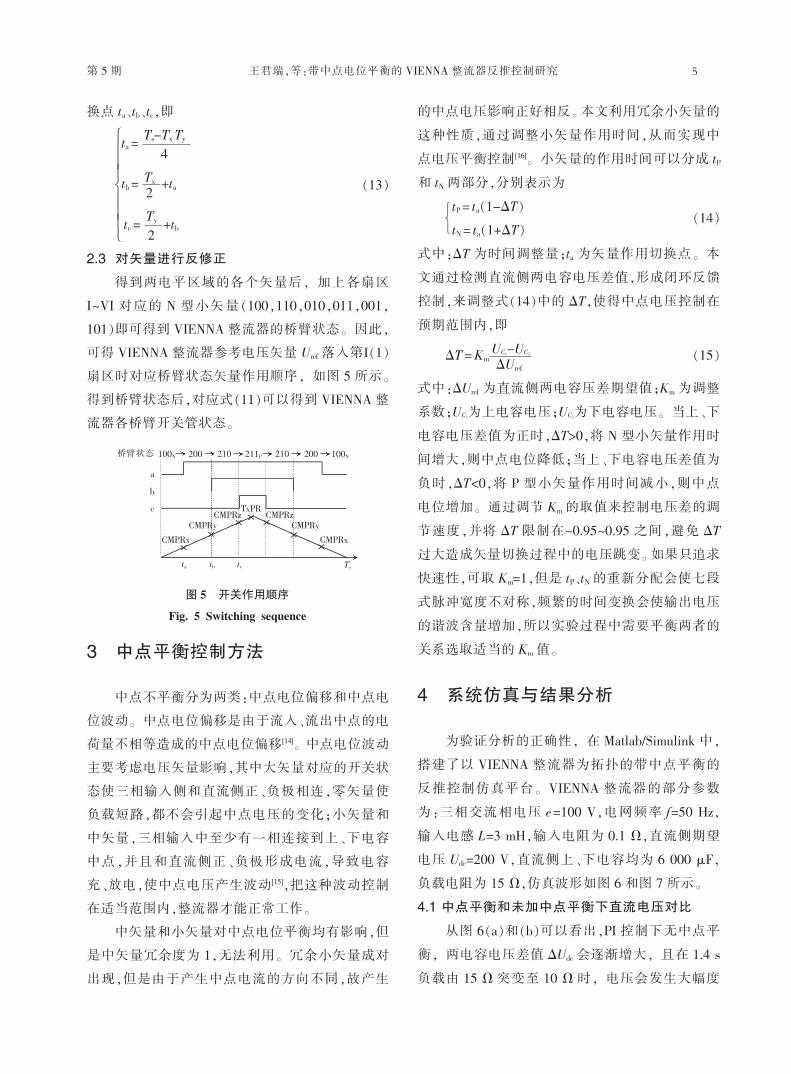
2.3
对矢量进行反修正
得到两电平区域的各个矢量后, 加上各扇区
I~VI
对应的
N
型小矢量 (
100
,
110
,
010
,
011
,
001
,
101
)即可得到
VIENNA
整流器的桥臂状态。 因此,
可得
VIENNA
整流器参考电压矢量
U
ref
落入第
I
(
1
)
扇区时对应桥臂状态矢量作用顺序, 如图
5
所示。
得到桥臂状态后,对应式(
11
)可以得到
VIENNA
整
流器各桥臂开关管状态。
3
中点平衡控制方法
中点不平衡分为两类:中点电位偏移和中点电
位波动。 中点电位偏移是由于流入、流出中点的电
荷量不相等造成的中点电位偏移
[14]
。 中点电位波动
主要考虑电压矢量影响,其中大矢量对应的开关状
态使三相输入侧和直流侧正、负极相连,零矢量使
负载短路,都不会引起中点电压的变化;小矢量和
中矢量,三相输入中至少有一相连接到上、下电容
中点,并且和直流侧正、负极形成电流,导致电容
充、放电,使中点电压产生波动
[15]
,把这种波动控制
在适当范围内,整流器才能正常工作。
中矢量和小矢量对中点电位平衡均有影响,但
是中矢量冗余度为
1
,无法利用。 冗余小矢量成对
出现,但是由于产生中点电流的方向不同,故产生
的中点电压影响正好相反。本文利用冗余小矢量的
这种性质,通过调整小矢量作用时间,从而实现中
点电压平衡控制
[16]
。 小矢量的作用时间可以分成
t
P
和
t
N
两部分,分别表示为
t
P
= t
a
(
1-ΔT
)
t
N
= t
a
(
1+ΔT
T
)
(
14
)
式中:
ΔT
为时间调整量;
t
a
为矢量作用切换点。 本
文通过检测直流侧两电容电压差值,形成闭环反馈
控制,来调整式(
14
)中的
ΔT
,使得中点电压控制在
预期范围内,即
ΔT =K
m
U
C
1
-U
C
2
ΔU
ref
(
15
)
式中:
ΔU
ref
为直流侧两电容压差期望值;
K
m
为调整
系数;
U
C
1
为上电容电压;
U
C
2
为下电容电压。 当上、下
电容电压差值为正时,
ΔT>0
,将
N
型小矢量作用时
间增大,则中点电位降低;当上、下电容电压差值为
负时,
ΔT<0
,将
P
型小矢量作用时间减小,则中点
电位增加。 通过调节
K
m
的取值来控制电压差的调
节速度,并将
ΔT
限制在
-0.95~0.95
之间,避免
ΔT
过大造成矢量切换过程中的电压跳变。如果只追求
快速性,可取
K
m
=1
,但是
t
P
、
t
N
的重新分配会使七段
式脉冲宽度不对称,频繁的时间变换会使输出电压
的谐波含量增加,所以实验过程中需要平衡两者的
关系选取适当的
K
m
值。
4
系统仿真与结果分析
为验证分析的正确性, 在
Matlab/Simulink
中,
搭建了以
VIENNA
整流器为拓扑的带中点平衡的
反推控制仿真平台。
VIENNA
整流器的部分参数
为:三相交流相电压
e=100 V
,电网频率
f=50 Hz
,
输入电感
L=3 mH
,输入电阻为
0.1 Ω
,直流侧期望
电压
U
dc
=200 V
,直流侧上、下电容均为
6 000 μF
,
负载电阻为
15 Ω
,仿真波形如图
6
和图
7
所示。
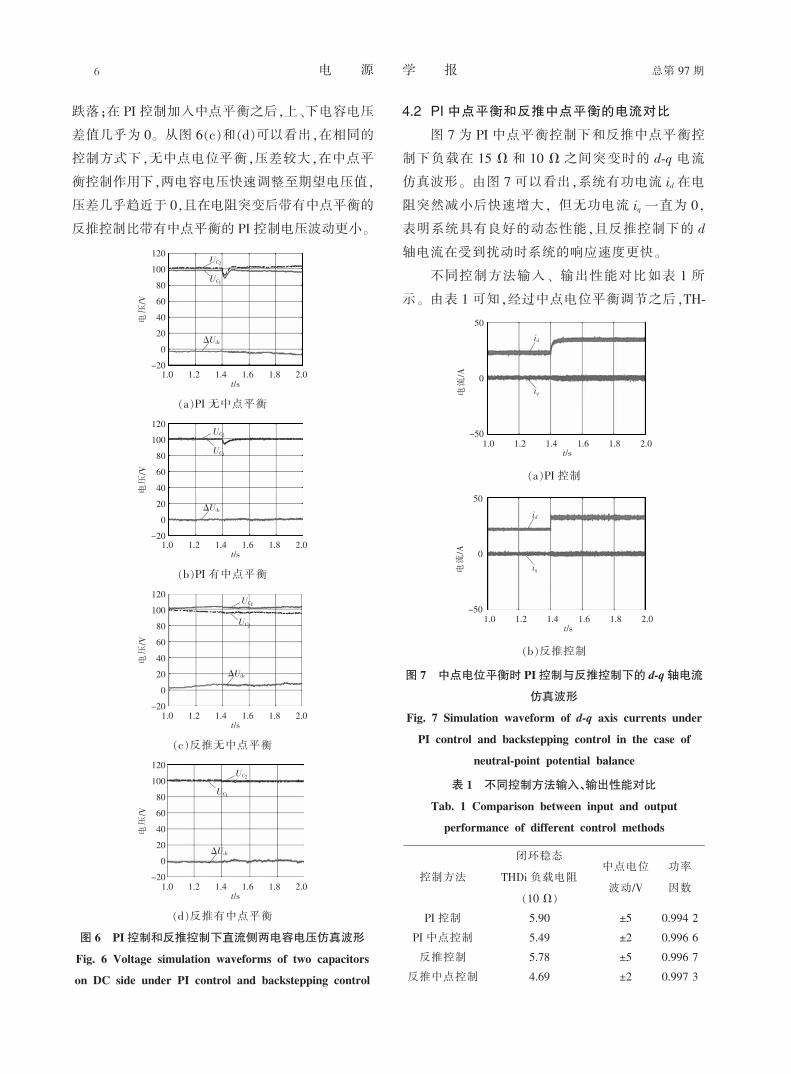
4.1
中点平衡和未加中点平衡下直流电压对比
从图
6
(
a
)和(
b
)可以看出,
PI
控制下无中点平
衡, 两电容电压差值
ΔU
dc
会逐渐增大, 且在
1.4 s
负载由
15 Ω
突变至
10 Ω
时, 电压会发生大幅度
图 5 开关作用顺序
Fig. 5 Switching sequence
王君瑞,等:带中点电位平衡的
VIENNA
整流器反推控制研究
100
N
200210211
P
210200100
N
桥臂状态
a
b
c
t
a
t
b
t
c
T
s
CMPRx
CMPRy
CMPRz
TxPR
CMPRz
CMPRy
CMPRx
5
总第
97
期
电 源 学 报
表 1 不同控制方法输入、输出性能对比
Tab. 1 Comparison between input and output
performance of different control methods
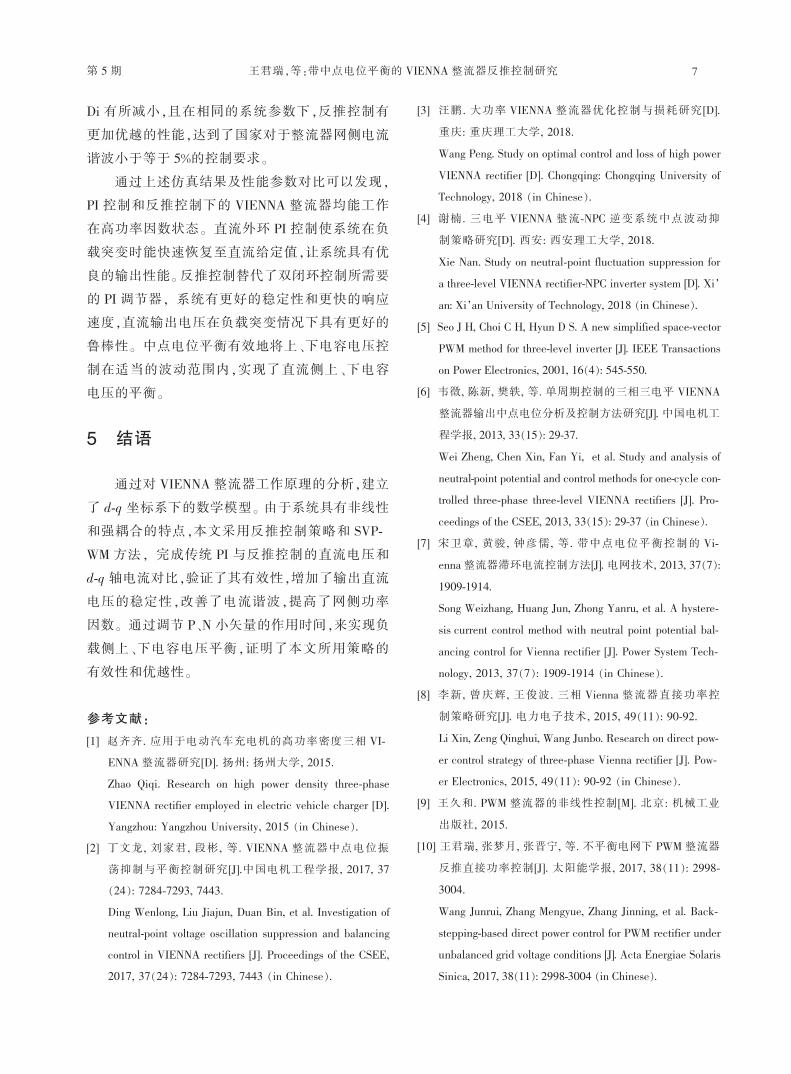
图 7 中点电位平衡时 PI控制与反推控制下的 d鄄q轴电流
仿真波形
Fig. 7 Simulation waveform of d鄄q axis currents under
PI control and backstepping control in the case of
neutral鄄point potential balance
(
a
)
PI
控制
(
b
)反推控制
图 6 PI控制和反推控制下直流侧两电容电压仿真波形
Fig. 6 Voltage simulation waveforms of two capacitors
on DC side under PI control and backstepping control
(
a
)
PI
无中点平衡
(
b
)
PI
有中点平衡
(
c
)反推无中点平衡
(
d
)反推有中点平衡
跌落;在
PI
控制加入中点平衡之后,上、下电容电压
差值几乎为
0
。 从图
6
(
c
)和(
d
)可以看出,在相同的
控制方式下,无中点电位平衡,压差较大,在中点平
衡控制作用下,两电容电压快速调整至期望电压值,
压差几乎趋近于
0
,且在电阻突变后带有中点平衡的
反推控制比带有中点平衡的
PI
控制电压波动更小。
4.2 PI
中点平衡和反推中点平衡的电流对比
图
7
为
PI
中点平衡控制下和反推中点平衡控
制下负载在
15 Ω
和
10 Ω
之间突变时的
d鄄q
电流
仿真波形。 由图
7
可以看出,系统有功电流
i
d
在电
阻突然减小后快速增大, 但无功电流
i
q
一直为
0
,
表明系统具有良好的动态性能,且反推控制下的
d
轴电流在受到扰动时系统的响应速度更快。
不同控制方法输入、 输出性能对比如表
1
所
示。 由表
1
可知,经过中点电位平衡调节之后,
TH鄄
120
100
80
60
40
20
0
-20
电压
/V
1.0 1.2 1.4 1.6 1.8 2.0
t/s
U
C
2
U
C
1
ΔU
dc
50
0
-50
电流
/A
1.0 1.2 1.4 1.6 1.8 2.0
t/s
i
d
i
q
1.0 1.2 1.4 1.6 1.8 2.0
t/s
50
0
-50
电流
/A
i
d
i
q
1.0 1.2 1.4 1.6 1.8 2.0
t/s
120
100
80
60
40
20
0
-20
电压
/V
ΔU
dc
U
C
2
U
C
1
1.0 1.2 1.4 1.6 1.8 2.0
t/s
120
100
80
60
40
20
0
-20
电压
/V
ΔU
dc
U
C
1
U
C
2
1.0 1.2 1.4 1.6 1.8 2.0
t/s
120
100
80
60
40
20
0
-20
电压
/V
ΔU
dc
U
C
2
U
C
1
控制方法
闭环稳态
THDi
负载电阻
(
10 Ω
)
中点电位
波动
/V
功率
因数
PI
控制
5.90 ±5 0.994 2
PI
中点控制
5.49 ±2 0.996 6
反推控制
5.78 ±5 0.996 7
反推中点控制
4.69 ±2 0.997 3
6
第
5
期
Di
有所减小,且在相同的系统参数下,反推控制有
更加优越的性能,达到了国家对于整流器网侧电流
谐波小于等于
5%
的控制要求。
通过上述仿真结果及性能参数对比可以发现,
PI
控制和反推控制下的
VIENNA
整流器均能工作
在高功率因数状态。 直流外环
PI
控制使系统在负
载突变时能快速恢复至直流给定值,让系统具有优
良的输出性能。反推控制替代了双闭环控制所需要
的
PI
调节器, 系统有更好的稳定性和更快的响应
速度,直流输出电压在负载突变情况下具有更好的
鲁棒性。 中点电位平衡有效地将上、下电容电压控
制在适当的波动范围内,实现了直流侧上、下电容
电压的平衡。
5
结语
通过对
VIENNA
整流器工作原理的分析,建立
了
d鄄q
坐标系下的数学模型。 由于系统具有非线性
和强耦合的特点,本文采用反推控制策略和
SVP鄄
WM
方法, 完成传统
PI
与反推控制的直流电压和
d鄄q
轴电流对比,验证了其有效性,增加了输出直流
电压的稳定性,改善了电流谐波,提高了网侧功率
因数。 通过调节
P
、
N
小矢量的作用时间,来实现负
载侧上、下电容电压平衡,证明了本文所用策略的
有效性和优越性。
参考文献:
[1]
赵齐齐
.
应用于电动汽车充电机的高功率密度三相
VI鄄
ENNA
整流器研究
[D].
扬州
:
扬州大学
, 2015.
Zhao Qiqi. Research on high power density three鄄phase
VIENNA rectifier employed in electric vehicle charger [D].
Yangzhou: Yangzhou University, 2015
(
in Chinese
)
.
[2]
丁文龙
,
刘家君
,
段彬
,
等
. VIENNA
整流器中点电位振
荡抑制与平衡控制研究
[J].
中国电机工程学报
, 2017, 37
(
24
)
: 7284鄄7293, 7443.
Ding Wenlong, Liu Jiajun, Duan Bin, et al. Investigation of
neutral鄄point voltage oscillation suppression and balancing
control in VIENNA rectifiers [J]. Proceedings of the CSEE,
2017, 37
(
24
)
: 7284鄄7293, 7443
(
in Chinese
)
.
[3]
汪鹏
.
大功率
VIENNA
整流器优化控制与损耗研究
[D].
重庆
:
重庆理工大学
, 2018.
Wang Peng. Study on optimal control and loss of high power
VIENNA rectifier [D]. Chongqing: Chongqing University of
Technology, 2018
(
in Chinese
)
.
[4]
谢楠
.
三电平
VIENNA
整流
鄄NPC
逆变系统中点波动抑
制策略研究
[D].
西安
:
西安理工大学
, 2018.
Xie Nan. Study on neutral鄄point fluctuation suppression for
a three鄄level VIENNA rectifier鄄NPC inverter system [D]. Xi
’
an: Xi
’
an University of Technology, 2018
(
in Chinese
)
.
[5] Seo J H, Choi C H, Hyun D S. A new simplified space鄄vector
PWM method for three鄄level inverter [J]. IEEE Transactions
on Power Electronics, 2001, 16
(
4
)
: 545鄄550.
[6]
韦徵
,
陈新
,
樊轶
,
等
.
单周期控制的三相三电平
VIENNA
整流器输出中点电位分析及控制方法研究
[J].
中国电机工
程学报
, 2013, 33
(
15
)
: 29鄄37.
Wei Zheng, Chen Xin, Fan Yi, et al. Study and analysis of
neutral鄄point potential and control methods for one鄄cycle con鄄
trolled three鄄phase three鄄level VIENNA rectifiers [J]. Pro鄄
ceedings of the CSEE, 2013, 33
(
15
)
: 29鄄37
(
in Chinese
)
.
[7]
宋卫章
,
黄骏
,
钟彦儒
,
等
.
带中点电位平衡控制的
Vi鄄
enna
整流器滞环电流控制方法
[J].
电网技术
, 2013, 37
(
7
)
:
1909鄄1914.
Song Weizhang, Huang Jun, Zhong Yanru, et al. A hystere鄄
sis current control method with neutral point potential bal鄄
ancing control for Vienna rectifier [J]. Power System Tech鄄
nology, 2013, 37
(
7
)
: 1909鄄1914
(
in Chinese
)
.
[8]
李新
,
曾庆辉
,
王俊波
.
三相
Vienna
整流器直接功率控
制策略研究
[J].
电力电子技术
, 2015, 49
(
11
)
: 90鄄92.
Li Xin, Zeng Qinghui, Wang Junbo. Research on direct pow鄄
er control strategy of three鄄phase Vienna rectifier [J]. Pow鄄
er Electronics, 2015, 49
(
11
)
: 90鄄92
(
in Chinese
)
.
[9]
王久和
. PWM
整流器的非线性控制
[M].
北京
:
机械工业
出版社
, 2015.
[10]
王君瑞
,
张梦月
,
张晋宁
,
等
.
不平衡电网下
PWM
整流器
反推直接功率控制
[J].
太阳能学报
, 2017, 38
(
11
)
: 2998鄄
3004.
Wang Junrui, Zhang Mengyue, Zhang Jinning, et al. Back鄄
stepping鄄based direct power control for PWM rectifier under
unbalanced grid voltage conditions [J]. Acta Energiae Solaris
Sinica, 2017, 38
(
11
)
: 2998鄄3004
(
in Chinese
)
.
王君瑞,等:带中点电位平衡的
VIENNA
整流器反推控制研究
7

总第
97
期
电 源 学 报
作者简介:
王君瑞(
1978-
),女,通信作者,博士,
副教授。 研究方向:电力电子、风力发电技
术等。
E鄄mail
:
。
贾思宁(
1995-
),男,中国电源学会会
员,硕士研究生。 研究方向:电力电子与新
能源发电。
E鄄mail
:
。
向上(
1994-
),男,硕士研究生。研究方
向 : 电力电子与新能源发电 。
E鄄mail
:
59
。
王闯(
1997-
),男,硕士研究生。研究方
向:电力电子与新能源发电。
E鄄mail
:
116
。
单祥(
1992-
),男,硕士研究生。研究方
向:电力电子与新能源发电。
E鄄mail
:
568
。
李学生(
1976-
),男,硕士,副教授。 研
究方向:电力系统自动化。
E鄄mail
:
1570876
。
王君瑞
[11]
苑春明
.
三电平变换器
SVPWM
关键技术研究
[D].
合肥
:
合肥工业大学
, 2008.
Yuan Chunming. Research on key technology of SVPWM
for three鄄level converter [D]. Hefei: Hefei University of Tech鄄
nology, 2008
(
in Chinese
)
.
[12]
何登
,
李春茂
,
华秀洁
,
等
.
一种简化三电平
SVPWM
方
法研究
[J].
电力电子技术
, 2014, 48
(
5
)
: 74鄄76.
He Deng, Li Chunmao, Hua Xiujie, et al. The research of a
simplified three鄄level SVPWM method [J]. Power Electron鄄
ics, 2014, 48
(
5
)
: 74鄄76
(
in Chinese
)
.
[13]
姜海鹏
,
刘永强
.
带中点电位平衡控制的
VIENNA
整流
器简化
SVPWM
双闭环控制
[J].
电机与控制学报
, 2014,
18
(
2
)
: 35鄄41.
Jiang Haipeng, Liu Yongqiang. Simplified SVPWM dual
closed loop vector control method for VIENNA rectifier
with midpoint potential balance control [J]. Electric Machines
and Control, 2014, 18
(
2
)
: 35鄄41
(
in Chinese
)
.
[14]
刘小虎
,
谢顺依
.
三电平逆变器中点电位偏移的抑制方法
研究
[J].
哈尔滨工业大学学报
. 2005, 37
(
8
)
: 1153鄄1155.
Liu Xiaohu, Xie Shunyi. Control method for suppressing de鄄
viation of neutral point voltage in three鄄level inverter [J].
Journal of Harbin Institute of Technology, 2005, 37
(
8
)
: 1153鄄
1155
(
in Chinese
)
.
[15]
张晔
,
汤钰鹏
,
王文军
.
三电平逆变器空间矢量调制及
中点电位平衡研究
[J].
电气传动
, 2010, 40
(
2
)
: 33鄄36.
Zhang Ye, Tang Yupeng, Wang Wenjun. Research on SVP鄄
WM method and neutral鄄point voltage balance in three鄄level
inverter [J]. Electrical Drive, 2010, 40
(
2
)
: 33鄄36
(
in Chi鄄
nese
)
.
[16]
宋文祥
,
陈国呈
,
武慧
,
等
.
一种具有中点电位平衡功能
的三电平空间矢量调制方法及其实现
[J].
中国电机工程
学报
, 2006, 26
(
12
)
: 95鄄100.
Song Wenxiang, Chen Guocheng, Wu Hui, et al. A novel
SVPWM strategy and its implementation considering neu鄄
tral鄄point potential balancing for three鄄level NPC inverter
[J]. Proceedings of the CSEE, 2006, 26
(
12
)
: 95鄄100
(
in Chi鄄
nese
)
.
8