02 rafael isaacs
DESCRIPTION
Articulo de Topologia UNALTRANSCRIPT
Un espacio hiperconexo con muchos subespacios
Rafael IsaacsHomenaje a Carlos Ruiz Salguero
Universidad Industrial de Santander
January 24, 2013
Rafael Isaacs El espacio de los discursos
Palabras, codigos y bicodigos
Definicion
2∗ son las palabras (o cadenas) sobre el alfabeto {0, 1}. Masformalmente 2∗ =
⋃∞k=0 2
k donde 2k son las palabras de k letras y20 = {λ} siendo λ la palabra sin letras.2+ = 2∗ − {λ}
Definicion
2Z es el conjunto de funciones f : Z −→ 2 = {0, 1} 2Z con latopologıa producto (tomando 2 con la topologıa discreta) es unade tantas representaciones del famoso y muy importante espaciode Cantor. Hay muchas formas de dar una base a este espacio.Sea f : A −→ 2 una funcion definida sobre A que es unsubconjunto finito de Z, definimos [f ] como el conjunto de todaslas funciones que amplıan f a Z es decir:
[f ] = {g : Z −→ 2| g ⇃A= f }
El conjunto de todas las [f ] forma una base (de abiertos cerrados)Rafael Isaacs El espacio de los discursos
Palabras, codigos y bicodigos
Definicion
2∗ son las palabras (o cadenas) sobre el alfabeto {0, 1}. Masformalmente 2∗ =
⋃∞k=0 2
k donde 2k son las palabras de k letras y20 = {λ} siendo λ la palabra sin letras.2+ = 2∗ − {λ}
Definicion
2Z es el conjunto de funciones f : Z −→ 2 = {0, 1} 2Z con latopologıa producto (tomando 2 con la topologıa discreta) es unade tantas representaciones del famoso y muy importante espaciode Cantor. Hay muchas formas de dar una base a este espacio.Sea f : A −→ 2 una funcion definida sobre A que es unsubconjunto finito de Z, definimos [f ] como el conjunto de todaslas funciones que amplıan f a Z es decir:
[f ] = {g : Z −→ 2| g ⇃A= f }
El conjunto de todas las [f ] forma una base (de abiertos cerrados)Rafael Isaacs El espacio de los discursos
El espacio de los discursos
Definicion
El espacio de los discursos X es el espacio cociente 2Z/ ∼ dondef ∼ g si y solo si existe k ∈ Z tal que para todo z ∈ Z, se tienef (z) = g(z + k).
Los elementos de X, que llamaremos discursos, se deben ver comosucesiones que se extienden indefinidamente tanto a derecha comoa izquierda, sin interesar donde inician. Cada p ∈ X es un conjuntode funciones f ∈ 2Z cada una de ellas es re-presentante de p; quef ∈ p significa que la clase de equivalencia de f es p.
Rafael Isaacs El espacio de los discursos
Un discurso
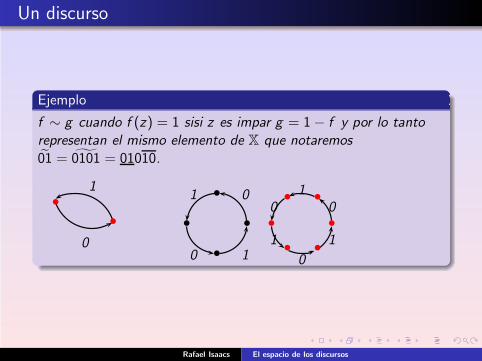
Ejemplo
f ∼ g cuando f (z) = 1 sisi z es impar g = 1− f y por lo tantorepresentan el mismo elemento de X que notaremos01 = 0101 = 01010.
01
10
••
•
•
01
0
1
0
1••
• •
• •0
1•
•
Rafael Isaacs El espacio de los discursos
Otros discursos
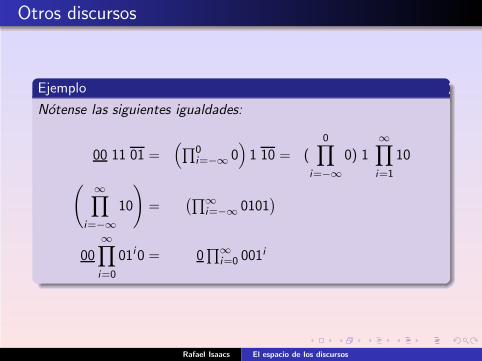
Ejemplo
Notense las siguientes igualdades:
00 11 01 =(∏0
i=−∞ 0)1 10 = (
0∏
i=−∞
0) 1
∞∏
i=1
10
(∞∏
i=−∞
10
)=
(∏∞i=−∞ 0101
)
00
∞∏
i=0
01i0 = 0∏∞
i=0 001i
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
Un abierto que no es basico: < 10 > ∪ < 01 >= X−{0, 1}.
Ejemplo
Todo abierto que contiene a 0 contiene a 01 mientras que < 01 >es una abierto que contiene a 01 pero que no contiene 0. Por
tanto la topologıa que hereda{0, 01
}es la de Sierpinski donde los
unicos abiertos son: {0, 01
},{01}, ∅
Ejemplo
Sean p = 0, , q = 01, r = 10 y s =∏
i∈Z(0|i |+11|i |+1); en la
topologıa que hereda {p, q, r , s} los abiertos son exactamente:
∅, {p, q, r , s}, {q, r , s}, {q, s}, {r , s}{s},Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
Un abierto que no es basico: < 10 > ∪ < 01 >= X−{0, 1}.
Ejemplo
Todo abierto que contiene a 0 contiene a 01 mientras que < 01 >es una abierto que contiene a 01 pero que no contiene 0. Por
tanto la topologıa que hereda{0, 01
}es la de Sierpinski donde los
unicos abiertos son: {0, 01
},{01}, ∅
Ejemplo
Sean p = 0, , q = 01, r = 10 y s =∏
i∈Z(0|i |+11|i |+1); en la
topologıa que hereda {p, q, r , s} los abiertos son exactamente:
∅, {p, q, r , s}, {q, r , s}, {q, s}, {r , s}{s},Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
Un abierto que no es basico: < 10 > ∪ < 01 >= X−{0, 1}.
Ejemplo
Todo abierto que contiene a 0 contiene a 01 mientras que < 01 >es una abierto que contiene a 01 pero que no contiene 0. Por
tanto la topologıa que hereda{0, 01
}es la de Sierpinski donde los
unicos abiertos son: {0, 01
},{01}, ∅
Ejemplo
Sean p = 0, , q = 01, r = 10 y s =∏
i∈Z(0|i |+11|i |+1); en la
topologıa que hereda {p, q, r , s} los abiertos son exactamente:
∅, {p, q, r , s}, {q, r , s}, {q, s}, {r , s}{s},Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
El conjunto de los discursos de la forma 10n1 para n ∈ N forma unconjunto infinito de discursos cuya topologıa es la discreta puescada abierto basico < 10n1 > contiene unicamente a un discursode estos.
Ejemplo
U =< 101 > ∪ < 1001 > ∪ < 10001 > ∪ . . . es un abierto que noes union finita de basicos y que no es compacto. El complemento
de U es el conjunto{01i0
}i∈N
∪{0, 1, 10, 01
}aquellos p ∈ X en
cuyas representaciones no se encuentran dos 1’s separados porceros, es decir todos los 1’s van en bloque.
Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
El conjunto de los discursos de la forma 10n1 para n ∈ N forma unconjunto infinito de discursos cuya topologıa es la discreta puescada abierto basico < 10n1 > contiene unicamente a un discursode estos.
Ejemplo
U =< 101 > ∪ < 1001 > ∪ < 10001 > ∪ . . . es un abierto que noes union finita de basicos y que no es compacto. El complemento
de U es el conjunto{01i0
}i∈N
∪{0, 1, 10, 01
}aquellos p ∈ X en
cuyas representaciones no se encuentran dos 1’s separados porceros, es decir todos los 1’s van en bloque.
Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
< 1 >= X−{0}
< 01 >= X−{0, 1, 10
}
< 11 > ∪ < 00 >= X−{01}
Rafael Isaacs El espacio de los discursos
Dinamicas en X
Definicion
Una 2-dinamica G es una pareja G =< V ,E > donde V es unconjunto cuyos elementos son los denominados vertices y
E ⊆ (V × V × 2)
y sus elementos son denominadas aristas (etiquetadas con 0 o 1).Si a = (v1, v2, x) ∈ E esto significa que a es una arista que va dev1 a v2 y esta etiquetada con x ∈ 2 .La 2-dinamica es finita si el conjunto de vertices es finito.GF la 2-dinamica final sera la 2-dinamica con un unico vertice v0 ydos arcos: (v0, v0, 0) y (v0, v0, 1).
Rafael Isaacs El espacio de los discursos
Dinamicas en X
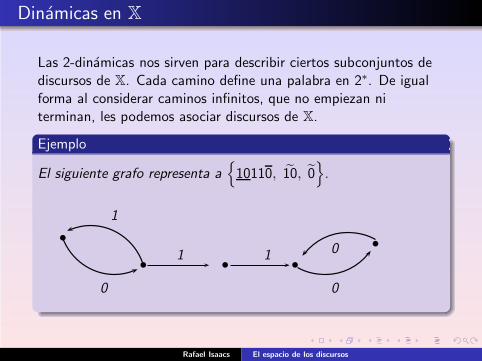
Las 2-dinamicas nos sirven para describir ciertos subconjuntos dediscursos de X. Cada camino define una palabra en 2∗. De igualforma al considerar caminos infinitos, que no empiezan niterminan, les podemos asociar discursos de X.
Ejemplo
El siguiente grafo representa a{10110, 10, 0
}.
0
1
1 1
0
0•
• • •
•
Rafael Isaacs El espacio de los discursos
Morfismos
Definicion
Si G = (V ,E ) y G ′ = (V ′,E ′) son 2-dinamicas diremos queΓ : V −→ V ′ es un morfismo si se cumple para todo vi , v2 ∈ V :
(v1, v2, x) ∈ E ⇒ (Γ(v1), Γ(v2), x) ∈ E ′
.Si Γ es ademas biyeccion y Γ−1 tambien es morfismo, entonces Γes un isomorfismo y G y G ′ son isomorfos.
Rafael Isaacs El espacio de los discursos
Ejemplos de Morfismos
Ejemplo
Sea w ∈ 2∗ una palabra de n letras, digamos w = x1 . . . xn,entonces definimos la 2 dinamica Gw = (V ,R) dondeV = {0, . . . , n} y R = {(i − 1, i , xi )}i = 1, . . . n. Ası las palabrasde 2∗ corresponden a las 2- dinamicas cuyos grafos asociados sonlineales. Gw no es conexa.
Definicion
Si f ∈ 2Z definimos Gf = (Z,Ef ) dondeEf = {(n, n + 1, f (n))}n∈Z.
Proposicion
Sean f , g ∈ 2Z entonces Gf es isomorfo a Gg , si y solo si, f ∼ g.Es mas, cualquier morfismo entre Gf y Gg es un isomorfismo.
Rafael Isaacs El espacio de los discursos
Ejemplos de Morfismos
Ejemplo
Sea w ∈ 2∗ una palabra de n letras, digamos w = x1 . . . xn,entonces definimos la 2 dinamica Gw = (V ,R) dondeV = {0, . . . , n} y R = {(i − 1, i , xi )}i = 1, . . . n. Ası las palabrasde 2∗ corresponden a las 2- dinamicas cuyos grafos asociados sonlineales. Gw no es conexa.
Definicion
Si f ∈ 2Z definimos Gf = (Z,Ef ) dondeEf = {(n, n + 1, f (n))}n∈Z.
Proposicion
Sean f , g ∈ 2Z entonces Gf es isomorfo a Gg , si y solo si, f ∼ g.Es mas, cualquier morfismo entre Gf y Gg es un isomorfismo.
Rafael Isaacs El espacio de los discursos
Ejemplos de Morfismos
Ejemplo
Sea w ∈ 2∗ una palabra de n letras, digamos w = x1 . . . xn,entonces definimos la 2 dinamica Gw = (V ,R) dondeV = {0, . . . , n} y R = {(i − 1, i , xi )}i = 1, . . . n. Ası las palabrasde 2∗ corresponden a las 2- dinamicas cuyos grafos asociados sonlineales. Gw no es conexa.
Definicion
Si f ∈ 2Z definimos Gf = (Z,Ef ) dondeEf = {(n, n + 1, f (n))}n∈Z.
Proposicion
Sean f , g ∈ 2Z entonces Gf es isomorfo a Gg , si y solo si, f ∼ g.Es mas, cualquier morfismo entre Gf y Gg es un isomorfismo.
Rafael Isaacs El espacio de los discursos
Regiones
Definicion
Dada una 2-dinamica G y un discurso en p ∈ X decimos quep ∈ L(G ) si existe un morfismo Γ : Gp −→ G.
Ejemplo
L(Gp) = {p} para todo p ∈ X.
Definicion
Una region de X es cualquier conjunto de la forma L(G ) donde Ges una 2-dinamica finita.
Rafael Isaacs El espacio de los discursos
Regiones
Definicion
Dada una 2-dinamica G y un discurso en p ∈ X decimos quep ∈ L(G ) si existe un morfismo Γ : Gp −→ G.
Ejemplo
L(Gp) = {p} para todo p ∈ X.
Definicion
Una region de X es cualquier conjunto de la forma L(G ) donde Ges una 2-dinamica finita.
Rafael Isaacs El espacio de los discursos
Regiones
Definicion
Dada una 2-dinamica G y un discurso en p ∈ X decimos quep ∈ L(G ) si existe un morfismo Γ : Gp −→ G.
Ejemplo
L(Gp) = {p} para todo p ∈ X.
Definicion
Una region de X es cualquier conjunto de la forma L(G ) donde Ges una 2-dinamica finita.
Rafael Isaacs El espacio de los discursos
Ejemplo de Region
Ejemplo
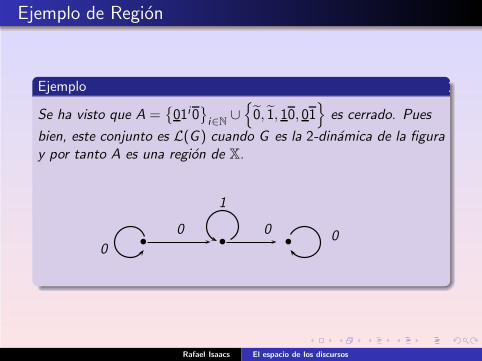
Se ha visto que A ={01i0
}i∈N
∪{0, 1, 10, 01
}es cerrado. Pues
bien, este conjunto es L(G ) cuando G es la 2-dinamica de la figuray por tanto A es una region de X.
• • •0
1
0 0 0
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
Proposicion
Sea G una 2-dinamica finita. Un discurso p ∈ X esta en L(G ) sisipara todo w ∈ 2+ se tiene que w ⊳ p implica w ∈ G [∗].
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
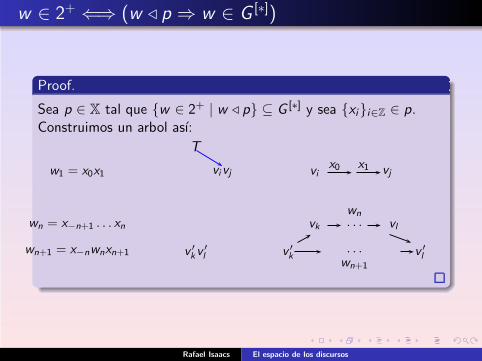
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn+1 = x−nwnxn+1
vivj
v ′
kv′
l v ′
k v ′
l. . .wn+1
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
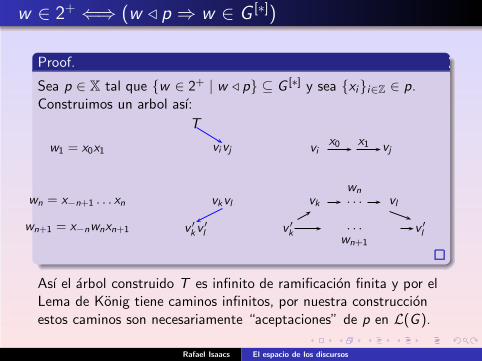
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn = x−n+1 . . . xn
wn+1 = x−nwnxn+1
vivj
v ′
kv′
l v ′
k v ′
l. . .wn+1
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn = x−n+1 . . . xn
wn+1 = x−nwnxn+1
vivj
v ′
kv′
l
vk vl. . .wn
v ′
k v ′
l. . .wn+1
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn = x−n+1 . . . xn
wn+1 = x−nwnxn+1
vivj
vkvl
v ′
kv′
l
vk vl. . .wn
v ′
k v ′
l. . .wn+1
Ası el arbol construido T es infinito de ramificacion finita y por elLema de Konig tiene caminos infinitos, por nuestra construccionestos caminos son necesariamente “aceptaciones” de p en L(G ).
Rafael Isaacs El espacio de los discursos
Las regiones son cerradas
Corolario
Las regiones de X son conjuntos cerrados.
Proof.
Si p /∈ L(G ) existe w ⊳ p tal que w /∈ G [∗] entonces p ∈< w > y< w > ∩L(G ) = ∅
Pregunta
¿Son todos los cerrados regiones?
Rafael Isaacs El espacio de los discursos
Las regiones son cerradas
Corolario
Las regiones de X son conjuntos cerrados.
Proof.
Si p /∈ L(G ) existe w ⊳ p tal que w /∈ G [∗] entonces p ∈< w > y< w > ∩L(G ) = ∅
Pregunta
¿Son todos los cerrados regiones?
Rafael Isaacs El espacio de los discursos

Las regiones son cerradas
Corolario
Las regiones de X son conjuntos cerrados.
Proof.
Si p /∈ L(G ) existe w ⊳ p tal que w /∈ G [∗] entonces p ∈< w > y< w > ∩L(G ) = ∅
Pregunta
¿Son todos los cerrados regiones?
Rafael Isaacs El espacio de los discursos