02_sintesis de numero
DESCRIPTION
hvjvjTRANSCRIPT

Dr. Higinio Rubio Alonso
Dr. Higinio Rubio Alonso
AMPLIACIÓN DE DISEÑO Y ENSAYO DE MÁQUINASMáster en Ingeniería Industrial
SINTESIS ESTRUCTURAL DE MECANISMOS
SINTESIS DE NUMERO
Dr. Higinio Rubio Alonso
CINEMÁTICA y DINÁMICA
� CINEMÁTICA: estudia el movimiento, independiente de las causasque lo producen.
► Trayectorias posiciones, desplazamientos, velocidades, aceleraciones,…► Resolución gráfica (Geometría), más pedagógica.► Resolución analítica (Cálculo y Algebra), más general y potente.
� DINÁMICA: estudia el movimiento, considerando las causas que logeneran y las reacciones que se producen.
► Potencia motriz, reacciones en los apoyos, tensiones y deformaciones elásticas,rendimiento, problemas tribológicos, vibraciones, fallos por choques o fatiga.
► Ecuaciones con mayor dificultad de resolución: se introduce el parámetro tiempoy las no-linealidades.
► Resolución grafo-analítica o analítica.► Principios generales de aplicación: Leyes de Newton, Teorema de los Trabajos
Virtuales, Ecuaciones de Lagrange, Principio de Hamilton, Bond Graphs, etc.2

Dr. Higinio Rubio Alonso
3
ANÁLISIS y SÍNTESIS
� ANÁLISIS► Proceso sistemático para verificar una solución existente.► Permite encontrar la respuesta de un sistema mecánico ante
diversas solicitaciones.
� SÍNTESIS► Proceso sistemático, sin procedimiento de iteración, de
seleccionar y organizar varios elementos de la maneraapropiada, para generar las soluciones deseadas, halladasdesde unas restricciones y requerimientos de funcionamiento.
Dr. Higinio Rubio Alonso
ANÁLISIS y SÍNTESIS
� ANÁLISIS: analizar una máquina o mecanismo ya existente.► Métodos de Análisis empleados generalmente en Dinámica.
� Problema Dinámico Directo. Se obtiene el movimiento de un sistema sometido a determinadas acciones conocidas.
� Problema Dinámico Inverso. A partir de un movimiento conocido, se calculan los esfuerzos motores y las reacciones en los enlaces y en los elementos.
� En todos los métodos de análisis dinámico debe realizarse el análisis cinemático previamente.
► Análisis cinemático y dinámico por computador.
� SÍNTESIS: diseñar un mecanismo que cumpla una función establecida o unas determinadas especificaciones.
► La Síntesis cinemática está más establecida que la Síntesis Dinámica.► La Síntesis o Diseño de mecanismos es el gran objetivo del ingeniero mecánico.► Síntesis Óptima de Mecanismos:
� Diseño óptimo de mecanismos con requerimientos dinámicos.� Cálculo de sensibilidades y optimización.� Métodos numéricos por computador. 4

Dr. Higinio Rubio Alonso
ANÁLISIS y SÍNTESIS
ANÁLISISDE MECANISMOS
SÍNTESIS DE MECANISMOS
DATOS DE PARTIDA� LAS DIMENSIONES DE
LOS ELEMENTOS Y SU DISPOSICIÓN EN EL MECANISMO.
� Nº DE PARÁMETROS CINEMÁTICOS = Nº DE GRADOS DE LIBERTAD DEL MECANISMO.
A DETERMINAR� EL MOVIMIENTO DE LOS
PUNTOS DEL MECANISMO: TRAYECTORÍAS Y FORMA DE SER RECORRIDAS.
DATOS DE PARTIDA� LOS PARÁMETROS
CINEMÁTICOS DE LOS ELEMENTOS DEL MECANISMO.
A DETERMINAR� LAS DIMENSIONES DE
LOS ELEMENTOS Y SU DISPOSICIÓN EN EL MECANISMO.
PROCESO INVERSO AL ANÁLISIS DE
MECANISMOS
5
Dr. Higinio Rubio Alonso
ANÁLISIS y SÍNTESIS
6
ANÁLISISDE MÁQUINAS
Y MECANISMOS
¿SOLUCIÓN ÚNICA?
PROBLEMAS DE INGENIERÍA DE MÁQUINAS Y MECANISMOS
SÍNTESISDE MÁQUINAS
Y MECANISMOS
SI
NO
Dr. Higinio Rubio Alonso
MÉTODOS de SÍNTESIS
� SÍNTESIS ESTRUCTURAL O SISTEMÁTICA.► SÍNTESIS DE TIPO.► SÍNTESIS DE NÚMERO.
� SÍNTESIS DIMENSIONAL.
� OTROS MÉTODOS DE SÍNTESIS.► SÍNTESIS DE GENERACIÓN DE FUNCIONES.► SÍNTESIS DE GENERACIÓN DE TRAYECTORIAS.► SÍNTESIS CON PUNTOS DE PRECISIÓN.► SÍNTESIS POR TANTEO GRÁFICO.► SÍNTESIS DE BLOCH.► ………………………………………
7
Dr. Higinio Rubio Alonso
TIPOS de SÍNTESIS
� Síntesis de tipo o de Reuleaux: Consiste en la elección de los tipos de eslabones ymecanismos a emplear (levas, engranajes, resortes, palancas) en el diseño, en funciónde criterios de equivalencia, bondad y diversas cualidades de los mecanismos.
� Síntesis de número o de Grübler: Trata de los grados de libertad, de las cadenascinemáticas, de la topología, isomorfismos, inversiones, configuraciones cinemáticasde un número de barras dado, de movilidad dada, etc. Durante este proceso se eligenel número de barras y de pares que van a formar el mecanismo final.
� Síntesis estructural o sistemática: Comprende la síntesis de tipo y de número.Normalmente, al efectuar la síntesis de un mecanismo se mezclan la síntesis de tipo yde número y lo que realmente se está realizando es una síntesis estructural, es decir,la elección del tipo de mecanismo (por ejemplo, conjunto leva-seguidor , conjuntomanivela-biela-balancín, etc.).
� Síntesis dimensional o de Burmester: Inicialmente englobaba todas las síntesis quedeterminaban las dimensiones de las barras de un mecanismo (tras haber realizado lasíntesis estructural). Hoy abarca las síntesis geométrico-planas de Burmester: halla lasdimensiones (geométricas) de las barras de un mecanismo para unas condicionesgeométricas específicas (guiado de un punto de trayectoria recta, circular, etc.).
8

Dr. Higinio Rubio Alonso
TIPOS de SÍNTESIS
� Síntesis de generación de funciones o de coordinación de barras: Coordina lasbarras de entrada y salida de un mecanismo en un número especificado de posiciones.
� Síntesis de generación de trayectorias: Ubica los puntos de las barras de unmecanismo a lo largo de trayectorias preestablecidas.
� Síntesis de guiado del cuerpo rígido: Situar el elemento acoplador de un mecanismoen un número especificado de posiciones.
� Síntesis exactas: Síntesis donde las condiciones exigidas se satisfacen exactamente.� Síntesis aproximadas: Síntesis donde las condiciones exigidas no se logran sin cierto
error: los pequeños errores que producen las modernas síntesis aproximadas y loserrores constructivos, de desgastes, etc. que siempre existen en un mecanismo. En lapráctica industrial, las síntesis exactas son equivalentes a las aproximadas.
� Síntesis con puntos de precisión: Síntesis exactas de un número finito deespecificaciones. Por ejemplo: síntesis de generación de funciones con 5 puntos deprecisión o síntesis de generación de trayectorias con 9 puntos de precisión.
� Síntesis con derivadas de precisión: Síntesis en las que existe coincidencia entrelas características y las derivadas de las características exigidas al mecanismo, y lascaracterísticas y sus derivadas que el mecanismo proporciona.
9
Dr. Higinio Rubio Alonso
TIPOS de SÍNTESIS
� Síntesis planas y espaciales: Síntesis de mecanismos planos y espaciales,respectivamente.
� Síntesis por tanteo gráfico (método “overlay”): Síntesis aproximada mediante unproceso de tanteo, usando elementos auxiliares (gráficos superpuestos en papeltransparente o, empleando el ordenador, mediante superposición de gráficoscontenidos en diferentes capas). En general, no comporta cálculos. Su principaldificultad radica en que después de muchos tanteos se puede estar tan lejos de lasolución como en la primera prueba. Su principal ventaja es su sencillez.
� Síntesis analíticas, gráficas o grafo-analíticas: Síntesis donde se empleanprocedimientos analíticos, gráficos o mixtos, respectivamente, para su resolución.
� Síntesis cinemáticas: Síntesis cuyas especificaciones son de tipo cinemático. Porejemplo, que la velocidad de un punto en una cierta trayectoria sea constante o que laaceleración angular de una barra sea nula, etc.
� Síntesis dinámicas: Síntesis cuyas especificaciones son dinámicas. Por ejemplo, queel centro de gravedad de un mecanismo sea estacionario o que las fuerzas de inerciasean minimizadas, etc.
� Síntesis de Bloch: Grupo de síntesis que, empleando la técnica de los númeroscomplejos, satisfacen requisitos cinemáticos. 10

Dr. Higinio Rubio Alonso
TIPOS de SÍNTESIS
� Síntesis de períodos de reposo: Esta síntesis aborda el problema de cuando unabarra presenta una detención en un intervalo de su movimiento.
� Síntesis de reducción de puntos de posición o de Hain: Síntesis dimensional dondees posible aumentar el número de condiciones de síntesis o facilitar esta, a partir de unaselección adecuada de puntos, para que estos puntos coincidan en diversas posiciones.
� Síntesis de Chebyshev: Síntesis que emplean los métodos que desarrolló Chebyshevy que consisten en minimizar la máxima desviación entre una función y la producida porel mecanismo, expresada esta desviación a través de los polinomios de Chebyshev.
� Síntesis óptimas: Síntesis aproximadas que emplean las técnicas de optimización.� Síntesis por gráficos de diseño: Síntesis obtenidas a través de tablas, nomogramas,
gráficos y otras ayudas que proceden del análisis previo de muchos mecanismos.� Síntesis de Lohse o método p : Síntesis aproximada para el posicionado múltiple de
barras, basada en la curva de polos (Polotkurven).� Síntesis elastocinéticas: Técnica que consiste en involucrar en el proceso de la
síntesis las deformaciones elásticas producidas por las fuerzas de inercia y exteriores.� Síntesis elastotérmicas: Técnica que consiste en implicar en el proceso de la síntesis
las deformaciones inducidas por la temperatura.11
Dr. Higinio Rubio Alonso
12
SÍNTESIS ESTRUCTURALDE MECANISMOS
Definición:� Es la parte de la síntesis que trata de la selección de tipos de
mecanismos y de las diversas maneras de producirse la
formación de las cadenas cinemáticas y de los mecanismos.
o Síntesis de tipo o Reuleaux
o Síntesis de número o de Grübler.

Dr. Higinio Rubio Alonso
13
Clasificación de los pares
Según el tipo de contacto entre dos barras que forman el par:
o Pares de contacto superficial Pares inferiores.
o Pares de contacto lineal o puntual.Pares superiores.
Dr. Higinio Rubio Alonso
14
Número de grados de libertad
� Nº mínimo de parámetros independientes necesarios para definir la configuración geométrica de un sistema en el espacio.
� Elemento en el espacio: 6 gdl►3 traslación. ►3 de rotación.
� Movilidad de una cadena cinemática en el plano
M = G + 3
� Movilidad del mecanismo en el plano M = G14
Dr. Higinio Rubio Alonso
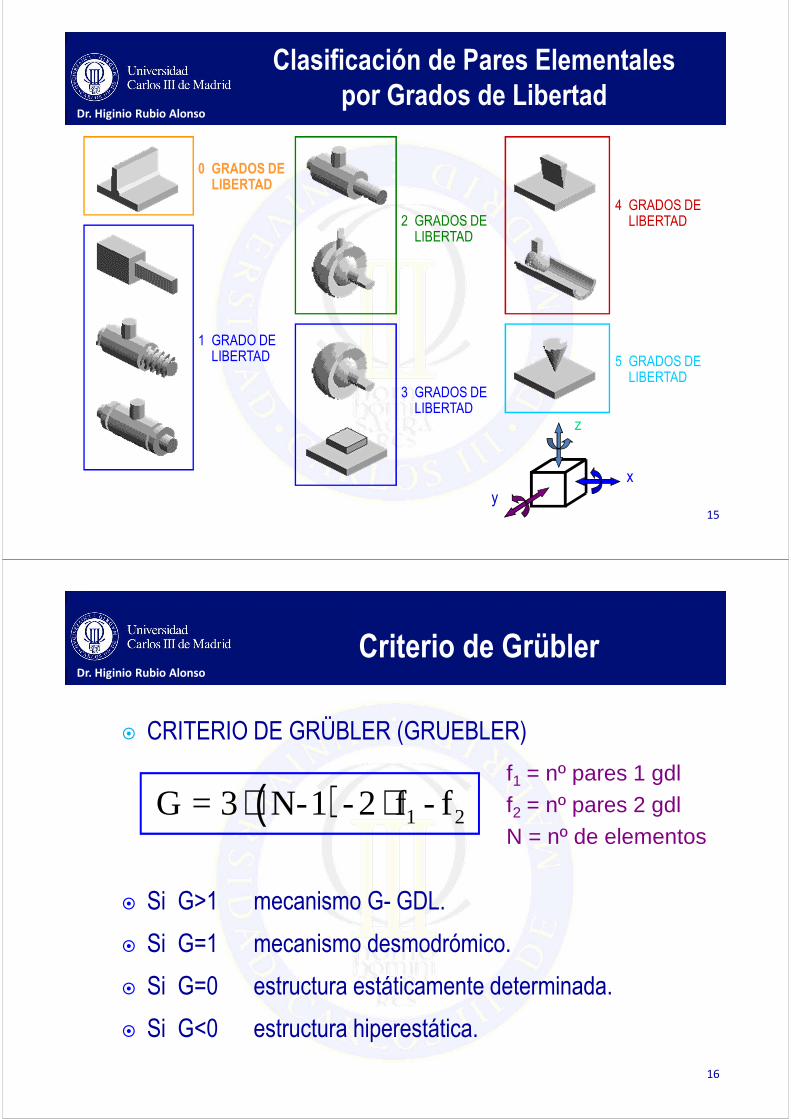
Clasificación de Pares Elementalespor Grados de Libertad
0 GRADOS DE LIBERTAD
1 GRADO DE LIBERTAD
2 GRADOS DE LIBERTAD
3 GRADOS DE LIBERTAD
4 GRADOS DE LIBERTAD
5 GRADOS DE LIBERTAD
yx
z
15
Dr. Higinio Rubio Alonso
Criterio de Grübler
� CRITERIO DE GRÜBLER (GRUEBLER)
� Si G>1 mecanismo G- GDL.
� Si G=1 mecanismo desmodrómico.
� Si G=0 estructura estáticamente determinada.
� Si G<0 estructura hiperestática.
( ) 1 2G = 3 N-1 -2 f - f⋅ ⋅f1 = nº pares 1 gdlf2 = nº pares 2 gdlN = nº de elementos
16

Dr. Higinio Rubio Alonso
Criterio de Grübler
� N = 5� F1 = 6� F2 = 0� G = 3·(5 – 1) – 2 · 6 = 0
� N = 4� F1 = 4� F2 = 1� G = 3·(4 – 1) – 2 · 4 – 1 = 0
( ) 1 2G = 3 N-1 -2 f - f⋅ ⋅
17
Dr. Higinio Rubio Alonso
Criterio de Restricción
� CRITERIO DE RESTRICCIÓN
►J Número de nudos del mecanismo► Nº de barras con 2 pares cinemáticos de 1 gdl► Nº de barras con 3 pares cinemáticos de 1 gdl►…..► Nº de barras con K pares cinemáticos de 1 gdl
( ) ( )2 3 4 kG = 2 J-3 - n +3 n +5 n + + 2 K-3 n⋅ ⋅ ⋅ ⋅ ⋅ ⋯
3n2n
nk
18

Dr. Higinio Rubio Alonso
Criterio de Restricción
� J = 7� n2 = 4� n3 = 2� n4 = n5 = … = nk = 0
� G = 2 · 7 – 3 – [4 · 1 – 3 · 2] = 1
( ) ( )2 3 4 kG = 2 J- 3 - n + 3 n + 5 n + + 2 K- 3 n⋅ ⋅ ⋅ ⋅ ⋅ ⋯
19
Dr. Higinio Rubio Alonso
20
Número de elementos, n = 12,
f1 = 12 (pins) + 3 (slider) = 15
f2 = 0
G = 3(n – 1) – 2f1 – f2 = 3(12-1) -2(15) = 3
12 11
10
98
7
6
5
1
2
3
4
11, 12
1
2
3
4
56
78
9
10
3 ACTUADORES HIDRÁULICOS
Número de grados de libertad
13
14
15

Dr. Higinio Rubio Alonso
Número de grados de libertad
21
Dr. Higinio Rubio Alonso
Número de grados de libertad
22

Dr. Higinio Rubio Alonso
Número de grados de libertad
23
Dr. Higinio Rubio Alonso
Número de grados de libertad
24

Dr. Higinio Rubio Alonso
Criterio de Grübler: Incongruencias
25
� N = 5
� F1 = 6
� F2 = 0
� G = 3·(5 – 1) – 2 · 6 -1 · 0 = 0 gdl
Dr. Higinio Rubio Alonso
Criterio de Grübler: Incongruencias
26
� N = 9� F1 = 12� F2 = 0� G = 3·(9 – 1) – 2 ·12 = 0 gdl
� N = 9� F1 = 12� F2 = 0� G = 3·(9 – 1) – 2 · 12 = 0 gdl
(Estructura Isostática)

Dr. Higinio Rubio Alonso
Criterio de Grübler: Incongruencias
27
� Rodadura + Deslizamiento = 2 gdl� N = 4� F1 = 3� F2 = 1� G = 3·(4 – 1) – 2·3 – 1·1 = 2 gdl
� Rodadura pura = 1 gdl� N = 4� F1 = 4� F2 = 0� G = 3·(4 – 1) – 2·4 – 1·0 = 1 gdl
4
¿Rodadura purao
Rodadura + Deslizamiento?
Dr. Higinio Rubio Alonso
Criterio de Grübler: Incongruencias
28
� Soluciones adoptadas:� Las barras del mecanismo no deben tener dimensiones idénticas.� Identificar los grupos de elementos que forman estructuras (sólidos
rígidos)� En el caso de la rodadura eliminar un grado de libertad
¿Rodadura purao
Rodadura + Deslizamiento?

Dr. Higinio Rubio Alonso
29
� La ecuación deducida por Grübler es:
�Todos los mecanismos desmodrómicos (de un grado de libertad) y pares de clase I, deben verificar:
�El número “N” de barras en un mecanismo con pares de la clase I y un grado de libertad debe de ser par. Con la ecuación anterior se deduce:
�El mínimo número de pares de la clase I que puede contener una barra es N/2
3N – 2P = 4
N = 2 (P+2) / 3
Leyes de Grübler
G = 3(N – 1) – 2P ) – L
G: número g.d.l. del mecanismo.
N: número de barras del mecanismo
P: número de pares de 1 g.d.l.
L: número de pares de 2 g.d.l.
Dr. Higinio Rubio Alonso
30
� El número de barras binarias en una cadena cinemática, con pares de la clase I, es independiente del número de barras ternarias
� Mecanismos con dimensiones especiales (Ej.: lados iguales) pueden violar las leyes de Grübler
� Para cadenas con pares P se han de tener en cuenta las siguientes restricciones:
� Ninguna barra de una cadena puede contener sólo pares prismáticos cuyas direcciones de movimiento sean paralelas
� Barras binarias de una cadena que tengan únicamente pares prismáticos no pueden ser conectadas directamente
� Ningún circuito cerrado de una cadena puede tener menos de dos pares R
Leyes de Grübler

Dr. Higinio Rubio Alonso
31
Leyes de Grübler
a) La posición de la barra 1 es indeterminadab) La cadena es inmóvilc) Las barras 1 y 2 carecen de movimiento relativo
� Para cadenas con pares P se han de tener en cuenta las siguientes restricciones:� Ninguna barra de una cadena puede contener sólo pares prismáticos cuyas
direcciones de movimiento sean paralelas� Barras binarias de una cadena que tengan únicamente pares prismáticos no
pueden ser conectadas directamente� Ningún circuito cerrado de una cadena puede tener menos de dos pares R
Dr. Higinio Rubio Alonso
32
� Ley general de formación de las cadenas cinemáticas planas con pares R:
� Consecuencias:
� La ley de Grübler es un caso particular, con:
� Teoremas:
� No se puede construir mecanismos sin barras binarias
� Cualquier configuración plana de nudos y barras con pares “R” tiene la movilidad “M” y el número de barras “N”, ambos pares o impares
� La obtención de los grados de libertad en un mecanismo se obtiene mediante la formula:
N – M = n3 + p3 + 2(n4 + p4) + 3(n5 + p5) + ....
p3 = p4 = p5 = 0
Leyes generales de formación de las cadenas cinemáticas planas con pares R
G = N – [3 + n3 + p3 + 2(n4 + p4) + 3(n5 + p5) + ....