1050: 車載用adas/自動運転プラットフォームdrive...
TRANSCRIPT

シニア・ソリューションアーキテクト 馬路 徹, 2015年9月18日
車載用ADAS/自動運転プラットフォームDRIVE PX
及びコックピト・プラットフォームDRIVE CXのご紹介

2
Agenda
Autonomous Driving System Architecture and DRIVE PX/CX Implementations
DRIVE PX for Map Module, AI Module and Computer Vision
DRIVE CX for HMI Module
Summary

3
Autonomous Driving System ArchitectureTypical Architecture
地図モジュール- 固定道路地図- ローカルダイナミックマップ
- 目標走行軌跡生成
速度制御モジュール- Adaptive Cruise Control- Pre-Crush System
エンジン・ブレーキ
操舵制御モジュール(車線維持制御)
ハンドル
HMI モジュール-手動、自動切換え操作システム- 稼動状況表示
ビッグデータ、道路・交通情報等(車外データ)
走行環境センシングおよび障害物認識- 前方の障害物センシング(ミリ波レーダ、レーザレーダ、カメラ)- レーンマーカセンシング
測位GPS
参考文献:「自動運転 システム構成と要素技術」、保坂明夫、青木啓二、津川定之 森北出版、2015年7月Reference: “Automated Driving System and Technologies”, Akio Hosaka et al, Morikita Publishing Co., Ltd., July 2015
人工知能モジュール- 環境理解- 判断- 目標走行軌跡修正
修正指示
修正指示
道路地図交通情報等
道路線形
障害物位置等
車間距離
白線距離

4
Autonomous Driving System ArchitectureTypical Architecture
MAP MODULE- Road Map
- Local Dynamic Map
- Target Path Generation
SPEED CONTROL
MODULE- Adaptive Cruise Control
- Pre-Crush System
Engine, Break
STEERING CONTROL
MODULE- Lane Keep Control
Steering
HMI MODULE- Auto/Manual Mode SW
Operation
- System Operation Status
Big Data, Road, Traffic Information etc
Driving Environment Sensing and Obstacle Recognition- Front Obstacles Sensing (Mili-wave Radar, Laser Radar, Camera)
- Lane Marker Sensing
Position
Sensing
GPS
AI MODULE- Environment Recognition
- Decision Making
- Target Path Tuning
AdjustingAcceleration
Adjusting Direction
Road MapTraffic Information
Road Structure
ObstacleLocation
CarDistance
Lane Distance
参考文献:「自動運転 システム構成と要素技術」、保坂明夫、青木啓二、津川定之 森北出版、2015年7月Reference: “Automated Driving System and Technologies”, Akio Hosaka et al, Morikita Publishing Co., Ltd., July 2015

5
Autonomous Driving System ArchitectureMAP MODULE implementation by DRIVE PX/CUDA
SPEED CONTROL
MODULE- Adaptive Cruise Control
- Pre-Crush System
Engine, Break
STEERING CONTROL
MODULE- Lane Keep Control
Steering
HMI MODULE- Auto/Manual Mode SW
Operation
- System Operation Status
Big Data, Road, Traffic Information etc
Driving Environment Sensing and Obstacle Recognition- Front Obstacles Sensing (Mili-wave Radar, Laser Radar, Camera)
- Lane Marker Sensing
Position
Sensing
GPS
AI MODULE- Environment Recognition
- Decision Making
- Target Path Tuning
AdjustingAcceleration
Adjusting Direction
Road MapTraffic Information
Road Structure
ObstacleLocation
CarDistance
Lane Distance
DRIVE PX / CUDA
MAP MODULE- Road Map
- Local Dynamic Map
- Target Path Generation
参考文献:「自動運転 システム構成と要素技術」、保坂明夫、青木啓二、津川定之 森北出版、2015年7月Reference: “Automated Driving System and Technologies”, Akio Hosaka et al, Morikita Publishing Co., Ltd., July 2015

6
Autonomous Driving System Architecture+ AI MODULE implementation by DRIVE PX/DL
SPEED CONTROL
MODULE- Adaptive Cruise Control
- Pre-Crush System
Engine, Break
STEERING CONTROL
MODULE- Lane Keep Control
Steering
HMI MODULE- Auto/Manual Mode SW
Operation
- System Operation Status
Big Data, Road, Traffic Information etc
Driving Environment Sensing and Obstacle Recognition- Front Obstacles Sensing (Mili-wave Radar, Laser Radar, Camera)
- Lane Marker Sensing
Position
Sensing
GPSAdjusting Direction
Road MapTraffic Information
Road Structure
ObstacleLocation
CarDistance
Lane Distance
DRIVE PX / CUDA DRIVE PX / DL
MAP MODULE- Road Map
- Local Dynamic Map
- Target Path Generation
AI MODULE- Environment Recognition
- Decision Making
- Target Path Tuning
AdjustingAcceleration
参考文献:「自動運転 システム構成と要素技術」、保坂明夫、青木啓二、津川定之 森北出版、2015年7月Reference: “Automated Driving System and Technologies”, Akio Hosaka et al, Morikita Publishing Co., Ltd., July 2015

7
Autonomous Driving System Architecture+ HMI MODULE Implementation by DRIVE CX/HMI
SPEED CONTROL
MODULE- Adaptive Cruise Control
- Pre-Crush System
Engine, Break
STEERING CONTROL
MODULE- Lane Keep Control
Steering
Big Data, Road, Traffic Information etc
Driving Environment Sensing and Obstacle Recognition- Front Obstacles Sensing (Mili-wave Radar, Laser Radar, Camera)
- Lane Marker Sensing
Position
Sensing
GPSAdjusting Direction
Road MapTraffic Information
Road Structure
ObstacleLocation
CarDistance
Lane Distance
DRIVE PX / CUDA DRIVE PX / DL
DRIVE CX/HMI
MAP MODULE- Road Map
- Local Dynamic Map
- Target Path Generation
AI MODULE- Environment Recognition
- Decision Making
- Target Path Tuning
HMI MODULE- Auto/Manual Mode SW
Operation
- System Operation
Status
AdjustingAcceleration
参考文献:「自動運転 システム構成と要素技術」、保坂明夫、青木啓二、津川定之 森北出版、2015年7月Reference: “Automated Driving System and Technologies”, Akio Hosaka et al, Morikita Publishing Co., Ltd., July 2015
8
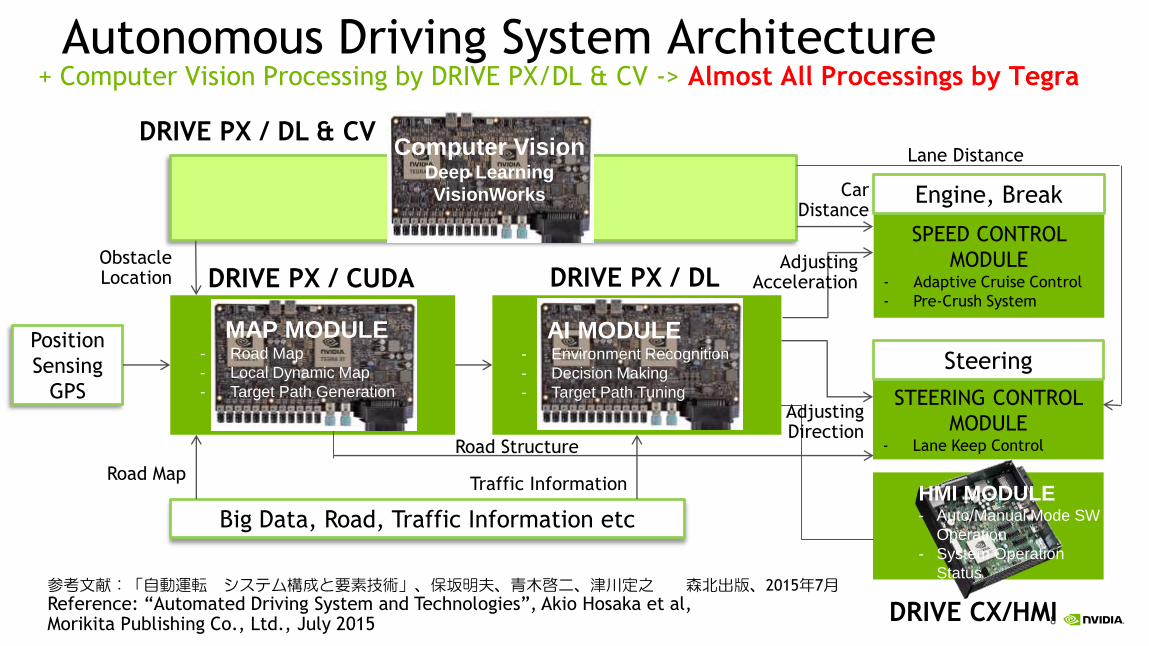
Autonomous Driving System Architecture+ Computer Vision Processing by DRIVE PX/DL & CV -> Almost All Processings by Tegra
SPEED CONTROL
MODULE- Adaptive Cruise Control
- Pre-Crush System
Engine, Break
STEERING CONTROL
MODULE- Lane Keep Control
Steering
Big Data, Road, Traffic Information etc
Position
Sensing
GPSAdjusting Direction
Road MapTraffic Information
Road Structure
ObstacleLocation
CarDistance
Lane Distance
DRIVE PX / CUDA DRIVE PX / DL
DRIVE CX/HMI
MAP MODULE- Road Map
- Local Dynamic Map
- Target Path Generation
AI MODULE- Environment Recognition
- Decision Making
- Target Path Tuning
HMI MODULE- Auto/Manual Mode SW
Operation
- System Operation
Status
Computer VisionDeep Learning
VisionWorks
DRIVE PX / DL & CV
AdjustingAcceleration
参考文献:「自動運転 システム構成と要素技術」、保坂明夫、青木啓二、津川定之 森北出版、2015年7月Reference: “Automated Driving System and Technologies”, Akio Hosaka et al, Morikita Publishing Co., Ltd., July 2015

9

10
Audi zFAS Example as a Low-Speed Autonomous Driving: Obstacle Recognition, Target Path Generation by one Tegar K1
From GTC2015
11
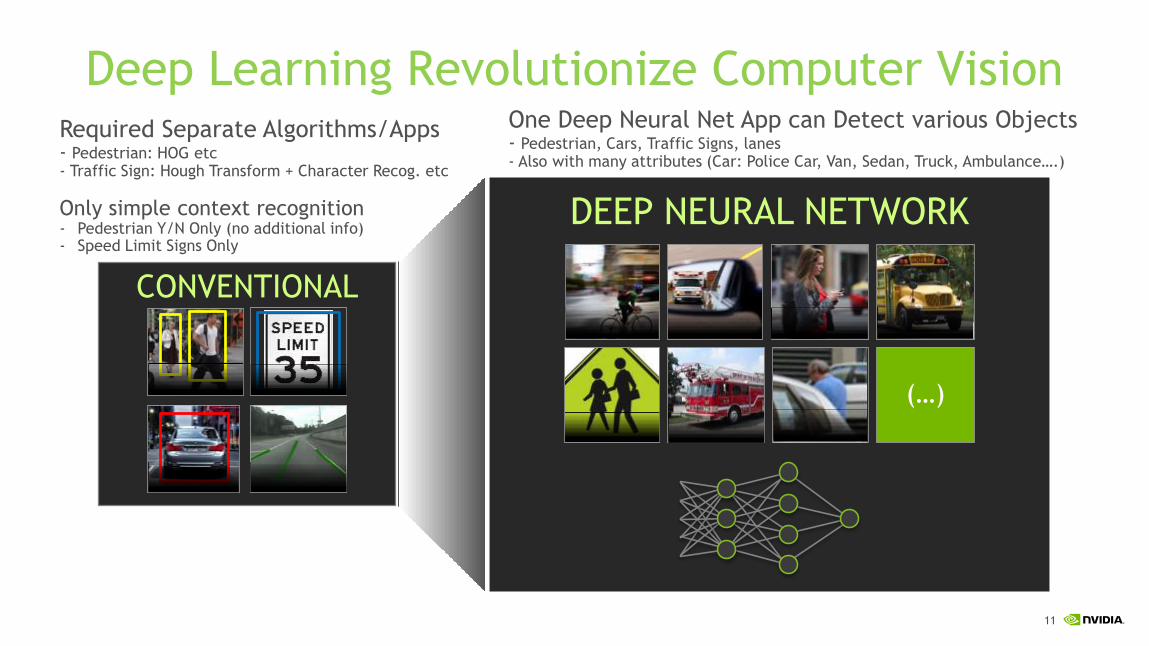
Deep Learning Revolutionize Computer Vision
CONVENTIONAL
DEEP NEURAL NETWORK
(…)
Required Separate Algorithms/Apps- Pedestrian: HOG etc- Traffic Sign: Hough Transform + Character Recog. etc
Only simple context recognition- Pedestrian Y/N Only (no additional info)- Speed Limit Signs Only
One Deep Neural Net App can Detect various Objects- Pedestrian, Cars, Traffic Signs, lanes- Also with many attributes (Car: Police Car, Van, Sedan, Truck, Ambulance….)

12
TEGRA X1 CLASSIFICATION Performance
AlexNet
0
10
20
30
40
50
60
70
80
90
100
Tegra K1 Tegra X1
IMAG
ES /
SECO
ND

13

14
Growing Performance of Automotive Tegra Products will allow further Integration in the Future
Tegra 2 Tegra 3
Tegra 4
Tegra K1
0
200
400
600
800
1000
1200
GFLO
PS
FP16/INT16
Core i7
Tegra X1
CPU
GPUGPU
CPU
Tegra X1 (FP16)
Note: 4790K Core i7, CPU @ 4GHz, GPU @ 350 MHz
TIME
15
DRIVE PX For Map Module, AI Module and Computer Vision

16
DRIVE PX
An advanced computing platform based on NVIDIA Tegra processors for autonomous driving cars
FEATURES
The ability to capture and process multiple HD camera and sensor inputs
A rich middleware for computer graphics, computer vision and deep learning
A powerful and easy to develop platform for algorithm research and rapid prototyping
NVIDIA CONFIDENTIAL — DRIVE PX DEVELOPMENT PLATFORM Preliminary information — Subject to change

17Proprietary & Confidential
All Information Subject to Change
DRIVE PX Camera & Display Interfaces
Group A Group B Group C
12 simultaneous LVDS camera inputs
• All cameras synchronized within each Group (3 groups)
2 LVDS display ports
Display

18
Other Interfaces to AurixCAN*, LIN*, FlexRay* and Ethernet
48-pin Automotive Grade
Vehicle Harness
CAN 2.0 (x6)
FlexRay (x2)
LIN (x4)
UART (x1)
Ethernet (x1)
1x Power

19
Hardware Specs PROCESSORS
Dual Tegra X1 VCM; each VCM consists of:
Tegra X1 processor
DRAM: 4GB
NOR FLASH: 64MB
eMMC: 64GB
Inter-Tegra X1 VCM Communication
SPI and USB 3.0 for direct inter-Tegra communication and through Ethernet Switch
ASIL-D MCU
Camera and IO controls through ASIL-D MCU.
NVIDIA CONFIDENTIAL — DRIVE PX DEVELOPMENT PLATFORM Preliminary information — Subject to change

20
Hardware Specs PERIPHERALS
Sensors:
Vision Sensors interface:
12x LVDS Cameras
Sensor Interfaces for Radar, LIDAR, Vehicle Dynamics etc.:
CAN 2.0; LIN; Ethernet; Flexray
Displays:
LVDS interface (x2)
Power Management of ECU:
System power monitor/control — ASIL-D MCU
NVIDIA CONFIDENTIAL — DRIVE PX DEVELOPMENT PLATFORM Preliminary information — Subject to change

21
DRIVE PX software specs
OS: NVIDIA Vibrante Linux 4.064-bit Kernel Linux, Quickboot, AutoSAR RunTimeEnvironment
Graphics: Open GL ES 3.1
Development Tools/Samples: Delivered through Jetpack 2.x
Graphics debugger, PerfKit, DNN Classifier Sample, Vision Works 1.0 (beta) Computer Vision libraries and Samples
ASIL MCU Support for CAN, Ethernet, Flexray and LIN; AutoSAR framework
External Storage for Video RecordingUSB3.0 interface for camera output in RAW or H.265/H.264 encoded formats
Camera: NVMedia and Driver support for LVDS camera
Open Source Collaboration initiatives/Compliance:
Yocto 1.8Genivi7 Compliant
NVIDIA CONFIDENTIAL — DRIVE PX DEVELOPMENT PLATFORM Preliminary information — Subject to change

22
WORLD CLASS SOFTWARE TOOLSFaster debug and analysis reduces development costs
Preliminary information — Subject to change
TEGRA GRAPHICS DEBUGGER
Visualize GPU performance metrics
Automated analysis of GPU bottlenecks
PERFKIT
Performance monitoring
Automated bottleneck analysis
ECLIPSE IDE
Standard Linux development environment

23
DRIVE PX LINUX SOFTWARE STACK
Preliminary information — Subject to change
Imaging (Camera) Pipeline
Linux
Performance Microprocessor A
Graphics/ComputeNVMedia
CUDA/EGL/Open GL ES
Tegra™ X1 Hardware (ARM, GPU & SoC Peripherals) Safety MCU
Safety MCU
MCA
L
Applications
T1/OEM SW OS/3rd SW/HW NVIDIA Licensed SW Drive PX HardwareElektrobit
AUTOSAR BSW on Linux
Linux
Performance Microprocessor B
Tegra™ X1 Hardware (ARM, GPU & SoC Peripherals)
AUTOSAR BSW on Linux
ApplicationsApplications
Linux BSP/Drivers
Filesystem(s)
Linux BSP/Drivers
Graphics/Compute
CV/DL Libraries
Imaging (Camera) Pipeline
Graphics/Compute NVMedia
CUDA/EGL/Open GL ES
Filesystem(s)
Graphics/Compute
CV/DL Libraries
AUTOSAR
on
Safety
MCU

24
DRIVE CXFor HMI MODULE
25NVIDIA CONFIDENTIAL
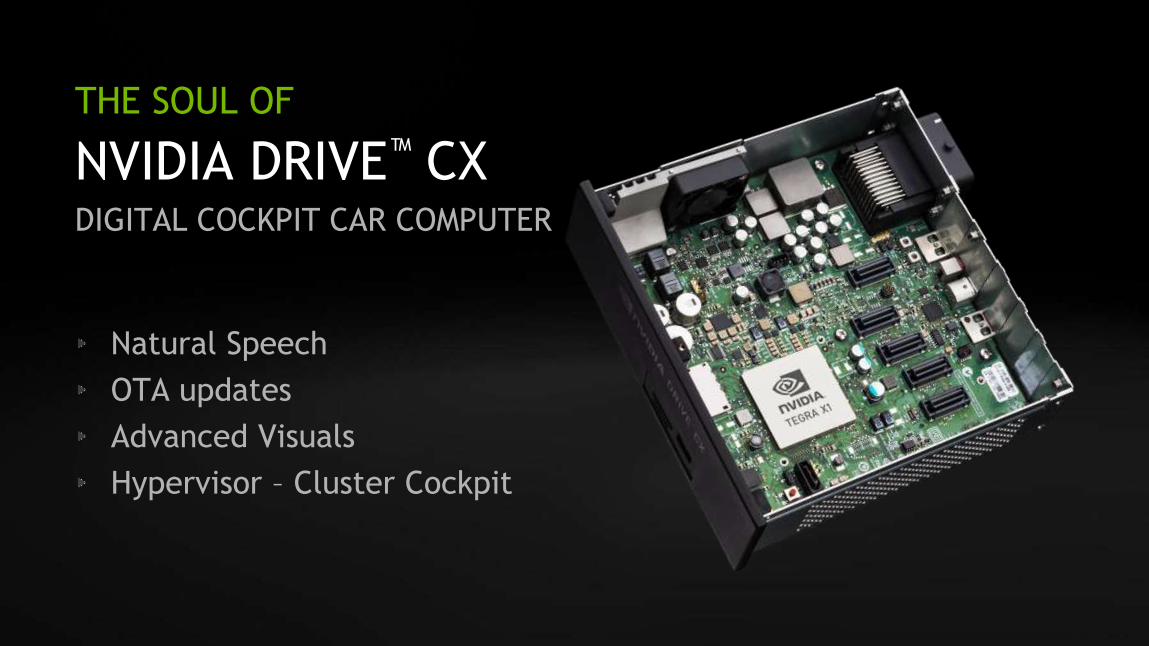
THE SOUL OF
NVIDIA DRIVE™ CXDIGITAL COCKPIT CAR COMPUTER
Natural Speech
OTA updates
Advanced Visuals
Hypervisor – Cluster Cockpit
26
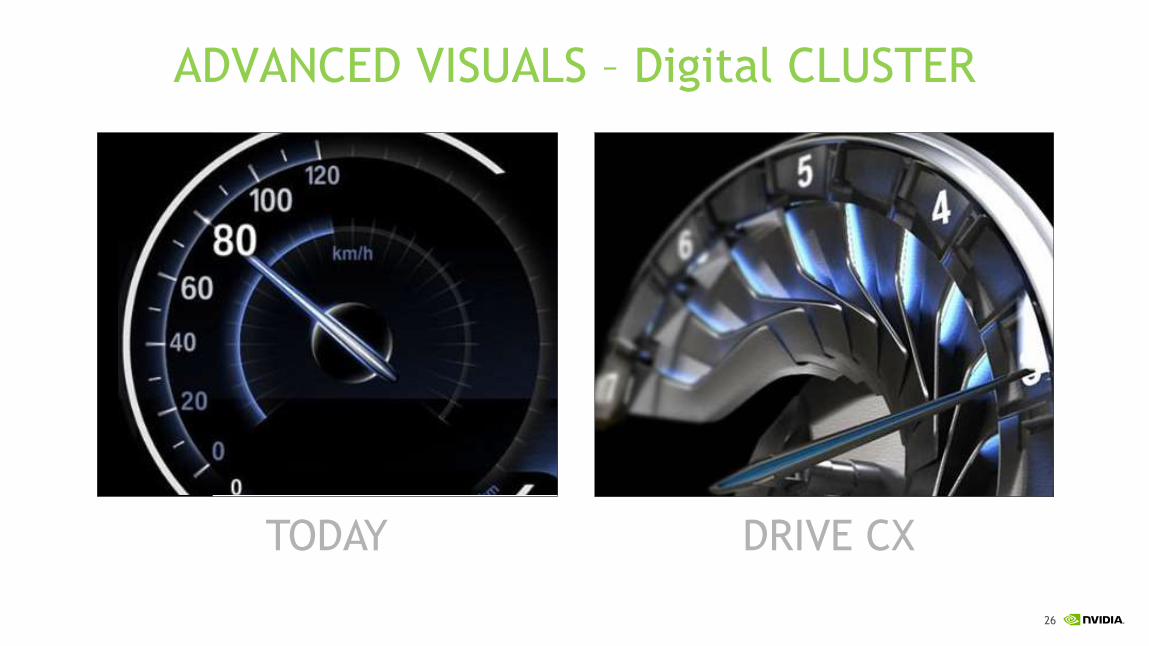
DRIVE CXTODAY
ADVANCED VISUALS – Digital CLUSTER

27
DRIVE CX ADASAlso supported by DRIVE PX
Best-in-Class
Surround View
28
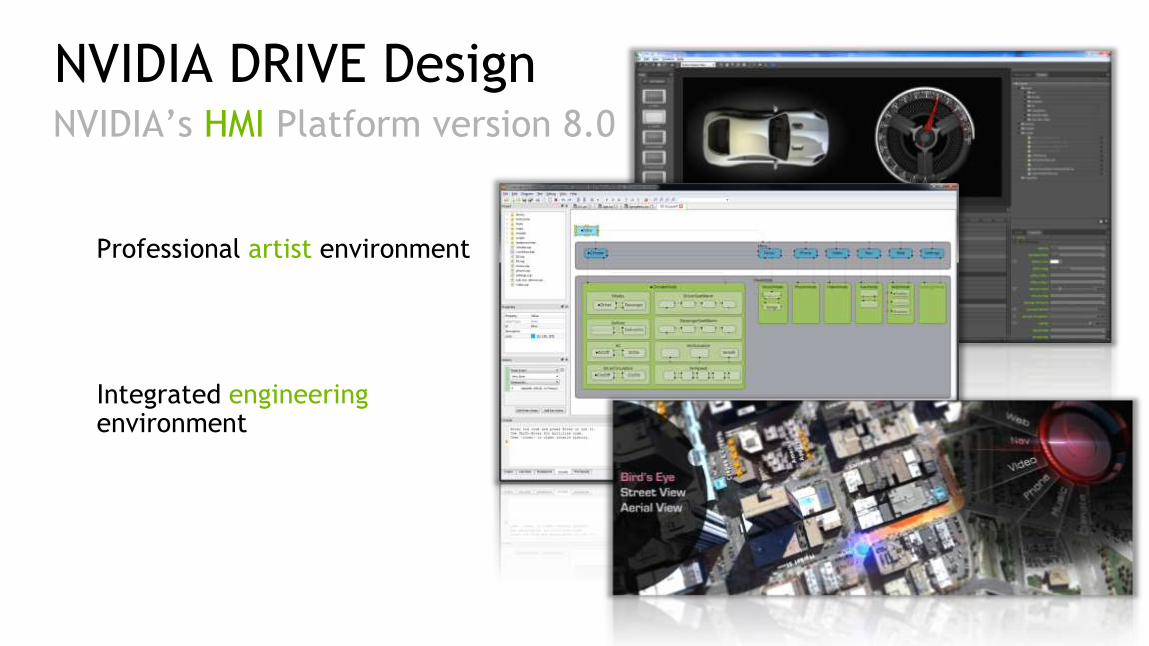
NVIDIA DRIVE Design
Design StudioProfessional artist environment
Design ArchitectIntegrated engineeringenvironment
NVIDIA’s HMI Platform version 8.0

29
Today(no internet connection)
Google(with Internet Connection)
DRIVE CX(no internet connection)
ACCURACY LOW1M parameters
HIGH30M parameters
HIGH30M parameters
VOCABULARY SMALL50k words
LARGE4M words
LARGE4M words
SPEED SLOW500+ ms latency
FAST
… or no response
(lost internet
connection)
FAST
… always
Fail-safe NATURAL LANGUAGE SPEECH
30
SUMMARY
1. Autonomous Driving System Architecture consists of Sensing Module, Map Module, AI Module and HMI Module. DRIVE PX and CX can implement all functions with CUDA, Deep Learning , Computer Vision and HMI Frameworks.
2. DRIVE PX consists of two powerful Tegra X1 processors with the total performance of 2.3TFLOPS. It comes with a rich middleware for GPU Computing, Deep Learning and Computer Vision.
3. DRIVE CX powerful Tegra X1 processor enables the fail-safe Natural Speech Recognition, advanced visual quality which offers a safe, versatile and high-quality HMI. This is essential for the critical human-car interaction in the Autonomous Driving Cars.
4. Today, we might start with a few DRIVE PX and a DRIVE CX. However, the continuous performance and feature enhancement in the future will make it possible to implement the total system by a single DRIVE platform if required.

THANK YOU