anÁlisis’del’rÉgimentransitorio’dela’mÁquina...
TRANSCRIPT

Universidad Simón Bolívar Departamento de Conversión y Transporte de Energía
CT-‐4311. Conversión de energía IV Tarea 3
Prof. José Manuel Aller
ANÁLISIS DEL RÉGIMEN TRANSITORIO DE LA MÁQUINA SINCRÓNICA (Tarea N° 3)
Alumno:
Freiber Rojas 09-‐10752
Sartenejas, Abril de 2013
Enunciado:
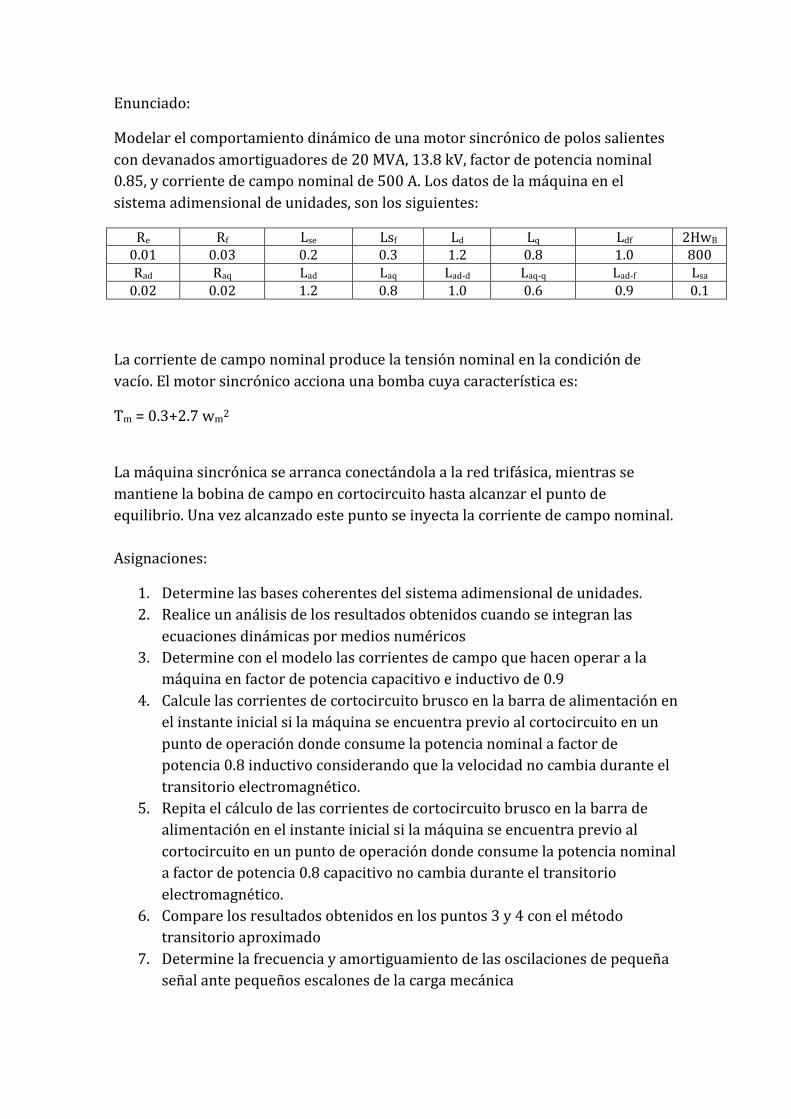
Modelar el comportamiento dinámico de una motor sincrónico de polos salientes con devanados amortiguadores de 20 MVA, 13.8 kV, factor de potencia nominal 0.85, y corriente de campo nominal de 500 A. Los datos de la máquina en el sistema adimensional de unidades, son los siguientes:
Re Rf Lse Lsf Ld Lq Ldf 2HwB 0.01 0.03 0.2 0.3 1.2 0.8 1.0 800 Rad Raq Lad Laq Lad-‐d Laq-‐q Lad-‐f Lsa 0.02 0.02 1.2 0.8 1.0 0.6 0.9 0.1
La corriente de campo nominal produce la tensión nominal en la condición de vacío. El motor sincrónico acciona una bomba cuya característica es:
Tm = 0.3+2.7 wm2
La máquina sincrónica se arranca conectándola a la red trifásica, mientras se mantiene la bobina de campo en cortocircuito hasta alcanzar el punto de equilibrio. Una vez alcanzado este punto se inyecta la corriente de campo nominal. Asignaciones:
1. Determine las bases coherentes del sistema adimensional de unidades. 2. Realice un análisis de los resultados obtenidos cuando se integran las
ecuaciones dinámicas por medios numéricos 3. Determine con el modelo las corrientes de campo que hacen operar a la
máquina en factor de potencia capacitivo e inductivo de 0.9 4. Calcule las corrientes de cortocircuito brusco en la barra de alimentación en
el instante inicial si la máquina se encuentra previo al cortocircuito en un punto de operación donde consume la potencia nominal a factor de potencia 0.8 inductivo considerando que la velocidad no cambia durante el transitorio electromagnético.
5. Repita el cálculo de las corrientes de cortocircuito brusco en la barra de alimentación en el instante inicial si la máquina se encuentra previo al cortocircuito en un punto de operación donde consume la potencia nominal a factor de potencia 0.8 capacitivo no cambia durante el transitorio electromagnético.
6. Compare los resultados obtenidos en los puntos 3 y 4 con el método transitorio aproximado
7. Determine la frecuencia y amortiguamiento de las oscilaciones de pequeña señal ante pequeños escalones de la carga mecánica

1) En la tabla 1.1 se muestran los valores correspondientes a las bases de las variables del estator en el sistema adimensional de unidades.
Tabla 1.1
V Base [KV] 7.9674 S Base [MVA] 6.6667 I base [A] 836.7395 Z base [Ω] 9.5220 ω base [rad/s] 376.9911 Tiempo base [ms] 2.6526 L base [mH] 25.2579
Luego, el valor de Lmd en unidades reales es:
𝐿𝑚𝑑 = 𝐿𝑑 − 𝐿!" ∗ 𝐿𝑏𝑎𝑠𝑒 = 25.2579𝑚𝐻
La inductancia Ldf se obtiene con la expresión de la fuerza electromotriz del campo en la condición de vacío:
𝐸𝑓 = 𝑉𝑛 =𝜔!3∗ 𝐿𝑑𝑓 ∗ 𝑖𝑓 → 𝐿𝑑𝑓 =
𝑉𝑛𝜔!3∗ 𝑖𝑓𝑛
= 73.2113𝑚𝐻
La relación La inductancia mutua y las inductancias de magnetización Lmf y Lmd permiten determinar el valor físico de la inductancia de magnetización del campo:
𝐿𝑚𝑓 =𝐿𝑑𝑓!
𝐿𝑚𝑑 = 212.2066𝑚𝐻
La tensión base y corriente base del campo se obtienen:
𝐼𝑏𝑓 = 𝐼𝑏 ∗𝐿𝑚𝑑𝐿𝑚𝑓 = 288.6751 𝐴; 𝑉𝑏𝑓 =
𝑉𝑏𝐼𝑏𝑓 ∗ 𝐼𝑏 = 23.094𝐾𝑉
Con estos valores se pueden las impedancias e inductancias base propias y mutuas. Los valores obtenidos se muestran en la tabla 1.2.
Tabla 1.2
V Base F [KV] 23.0940 I base F [A] 288.6751 Z base F [Ω] 80.0000 L base F [mH] 212.2066 Z base F-‐E [Ω] 27.6 L base F-‐E [mH] 73.2113

2) El sistema de ecuaciones diferenciales que debe integrarse es el siguiente:
𝑑𝐼𝑑𝑡 = 𝐿!! ∗ 𝑉 − 𝑅 ∗ 𝐼 − 𝜔 ∗ 𝐺 ∗ 𝐼
𝑑𝜔𝑑𝑡 =
(𝑇𝑒 − 𝑇𝑚)2 ∗ 𝐻 ∗ 𝜔𝑏𝑎𝑠𝑒
𝑑𝜃𝑑𝑡 = 𝜔
Donde:
𝐼 = 𝑣𝑒𝑐𝑡𝑜𝑟 𝑑𝑒 𝑐𝑜𝑟𝑟𝑖𝑒𝑛𝑡𝑒𝑠 =
𝑖𝑑𝑖𝑞𝑖𝑓𝑖𝑎𝑑𝑖𝑎𝑞
;𝑉 = 𝑣𝑒𝑐𝑡𝑜𝑟 𝑑𝑒 𝑡𝑒𝑛𝑠𝑖𝑜𝑛𝑒𝑠 =
𝑣𝑑𝑣𝑞𝑣𝑓𝑣𝑎𝑑𝑣𝑎𝑞
=
𝑣𝑑𝑣𝑞𝑣𝑓00
𝑅 = 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑟𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎𝑠 =
0.010
00.01
0 0 00 0 0
0 0 0.03 0 000
00
00
0.020
00.02
𝐿 = 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑡𝑟𝑎𝑛𝑠𝑓𝑜𝑟𝑚𝑎𝑐𝑖𝑜𝑛 =
1.20
00.8
1 1 00 0 0.6
1 0 1.3 0.9 010
00.6
0.90
1.20
00.8
𝐺 = 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑔𝑒𝑛𝑒𝑟𝑎𝑐𝑖𝑜𝑛 =
01.2
−0.80
0 0 −0.61 1 0
0 0 0 0 000
00
00
00
00
𝜔 = 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑎𝑛𝑔𝑢𝑙𝑎𝑟; 𝜃 = 𝑎𝑛𝑔𝑢𝑙𝑜 𝑑𝑒𝑙 𝑟𝑜𝑡𝑜𝑟
2 ∗ 𝐻 ∗ 𝜔𝑏𝑎𝑠𝑒 = 800; 𝑇𝑚 = 𝑝𝑎𝑟 𝑚𝑒𝑐𝑎𝑛𝑖𝑐𝑜 = 0.3+ 2.7 ∗ 𝜔!
𝑇𝑒 = 𝑝𝑎𝑟 𝑒𝑙𝑒𝑐𝑡𝑟𝑖𝑐𝑜 = 𝐿𝑑 − 𝐿𝑞 𝑖𝑑 ∗ 𝑖𝑞 + 𝐿𝑑𝑓 ∗ 𝑖𝑓 ∗ 𝑖𝑞 + 𝐿𝑎𝑑 ∗ 𝑖𝑎𝑑 ∗ 𝑖𝑞 − 𝐿𝑎𝑞 ∗ 𝑖𝑎𝑞 ∗ 𝑖𝑑
Con ayuda de matlab se integraron las ecuaciones. Para ello se empleó la función ode23tb que resuelve sistema de ecuaciones diferenciales dada la función del sistema, los tiempos iniciales y finales a integrar y las condiciones iniciales. El código que implementa la función del sistema es el siguiente:

function dX_dt =maq_sinc(t,X,inv_L,R,G,J)
va=sqrt(3)*cos(t);
vb=sqrt(3)*cos(t-2*pi/3);
vc=sqrt(3)*cos(t-4*pi/3);
alfa=exp(1i*2*pi/3);
v=sqrt(2/3)*(va+alfa*vb+alfa^2*vc);
theta=X(7);
w=X(6);
Vdq=v*exp(-1i*theta);
V=zeros(5,1);
V(1)=real(Vdq);
V(2)=imag(Vdq);
if abs(w-1)<0.01
V(3)=0.1;
end
dX_dt=zeros(7,1);
I=X(1:5);
dX_dt(1:5,1)=inv_L*(V-R*I-w*G*I);
Id=I(1);
Iq=I(2);
If=I(3);
Iad=I(4);
Iaq=I(5);
Te=(1.2-0.8)*Id*Iq + 1 * If*Iq + 1.2*Iad*Iq- 0.8 *Iaq*Id;
Tm=sign(w)*0.3+2.7*w^2*sign(w);
dX_dt(6,1)=1/J*(Te-Tm);
dX_dt(7,1)=w;
end
Con este código guardado y las variables inv_L, R, G y J se escriben las dos instrucciones siguientes en la línea de comandos:

>> f=@(t,X)(maq_sinc(t,X,inv_L,R,G,J));
>> [T,Y]=ode23tb(f,[0 5000],([0;0;0;0;0 ;0.01; 0]));
El sistema de ecuaciones diferenciales se resolvió con todas las variables de estado inicializadas en cero. Se aplicó un sistemas de tensiones nominales balanceadas en secuencia positiva. La tensión aplicada el campo es cero mientras la desviación de la velocidad angular sea mayor al cinco por ciento, una vez alcanzado este punto se inyecta la corriente nominal. Para determinar el valor de la tensión de campo que se debe aplicar se tiene:
𝐼𝑓𝑛 =500𝐴𝐼𝑏𝑎𝑠𝑒𝑓 = 1.732 𝑝𝑢; 𝑉𝑓𝑛 = 𝑅𝑓 ∗ 𝑖𝑓𝑛 = 0.05196 → 𝑉𝑓𝑛 = 1200𝑉
Los resultados de Vd, id,Vq, iq, Vf, if, iad,iaq se muestran en la figura 2.1. Los resultados obtenidos de w, theta, P, Q se muestran en la figura 2.2
Figura 2.1

Figura 2.2
3)
Para determinar las corrientes de campo con factor de potencia 0.9 inductivo y capacitivo (convención motor!) se debe resolver el problema directo. La potencia nominal es 0.85, por lo tanto ese debe ser el valor de la parte real de la corriente.
𝐸 = 𝑉 − 𝑅 ∗ 𝐼 − 𝑋𝑑 ∗ 𝐼𝑑 − 𝑋𝑞 ∗ 𝐼𝑞
Con ello se calculan las corrientes de campo. Los resultados se muestran en
la tabla 3.1.

Tabla 3.1
Valores Caso Inductivo Caso Capacitivo V [pu] 1.0000 1.0000 Re(I) 0.8500 0.8500 Im(I) 0.4117 -‐0.4117 I 0.9444 0.9444 If [pu] 1.8599 3.1005 If [A] 536.9069 895.0373
4) y 5) Para este caso se deben encontrar las condiciones pre falla. Esto implica hallar las corrientes de campo y del eje directo y cuadratura y las tensiones Vd, Vq y Vf que hacen operar la máquina en las condiciones de motor capacitivo e inductivo a potencia nominal (0.85) a factor de potencia 0.8 inductivo y capacitivo. Las condiciones pre falla
Tabla 4.1
Valores Caso Inductivo Caso Capacitivo V [pu] 1.0000 1.0000 Re(I) 0.8500 0.8500 Im(I) 0.6375 -‐0.6375 I 1.0625 1.0625 If [pu] 1.6564 3.506 If [A] 478.1615 1012.0950 Vd[pu] -‐1.4091 -‐0.7201 Vq[pu] 1.0072 1.5753 Vf [pu] 0.0497 0.1052 Id [pu] -‐0.5556 -‐1.6163 Iq [pu] 1.7544 0.8799
Luego resuelvo el siguiente sistema de ecuaciones diferenciales:
𝑑𝐼𝑑𝑡 = 𝐿!! ∗ 𝑉 − 𝑅 ∗ 𝐼 − 𝜔 ∗ 𝐺 ∗ 𝐼
Donde L, R y G son las mismas matrices que el caso anterior, w =1 y las condiciones iniciales de las corrientes y las tensiones aplicadas antes del cortocircuito son las especificadas en la tabla 4.1 según si el caso es capacitivo o inductivo. Cabe destacar que en esta corrida se asume que solo se cortocircuitan las bobinas del eje directo y cuadratura, mientras que el campo se mantiene constante. En la figura 4.1 y en la figura 4.2 se muestran las corrientes de corto para el caso inductivo y capacitivo respectivamente.

Figura 4.1

Figura 4.2
5) Para realizar los cálculos de cortocircuito brusco se deben calcular la reactancia transitoria del eje directo y las subtransitorias del eje directo y cuadratura. Para eso se tiene:
𝑋𝑑! = 𝑋𝑑 −𝐿𝑑𝑓!
𝐿𝑓 ; 𝑋𝑑!! = 𝑋𝑑 −𝐿𝑑 − 𝑎𝑑!
𝐿𝑎𝑑 ; 𝑋𝑞!! = 𝑋𝑞 −𝐿𝑞 − 𝑎𝑞!
𝐿𝑎𝑞
Los valores de las reactancias se muestran en la tabla 5.1.

Tabla 5.1
Xd 1.2000 Xq 0.8000 Ldf 1.0000 Lf 1.3000 Ld-‐ad 1.0000 Lq-‐aq 0.6000 Lad 1.2000 Laq 0.8000 Xd' 0.4308 Xd'' 0.3667 Xq'' 0.3500
Con esto, se realiza el cálculo de las corrientes transitorias y subtransitorias, para ello se debe resolver dos problemas directos, una con las condiciones pre falla y otra con la condición post falla. Las ecuaciones transitorias y subtransitorias son las siguientes.
𝐸′ = 𝑉 − 𝑅 ∗ 𝐼 − 𝑋𝑑′ ∗ 𝐼𝑑 − 𝑋𝑞 ∗ 𝐼𝑞
𝐸′′ = 𝑉 − 𝑅 ∗ 𝐼 − 𝑋𝑑′′ ∗ 𝐼𝑑 − 𝑋𝑞′′ ∗ 𝐼𝑞
Con las ecuaciones anteriores y con las condiciones pre falla expresados en la tabla 4.1 se obtienen las fuerzas electromotrices transitorias y subtransitorias, los resultados se expresan en la tabla 5.2
Tabla 5.2
Valores Caso Inductivo Caso Capacitivo E'd 0 0 E'q 0.7096 1.3064 E''d 0.0445 0.0198 E''q 0.7136 1.2497
Con estos valores se puede encontrar las corrientes transitorias y subtransitorias del eje directo y cuadratura. Se debe resolver el siguiente sistema de ecuaciones para el caso transitorio y subtransitorio respectivamente:
𝑅𝑒 𝑋𝑞𝑋𝑑 𝑅𝑒 ∗ 𝐼𝑑
𝐼𝑞 = 𝑉𝑑 − 𝐸𝑑𝑉𝑞 − 𝐸𝑞
Se debe tener cuenta que la ecuación anterior se aplica para el caso transitorio y subtransitorio. Solo se debe tomar en cuenta sustituir las reactancias correctas según se trate del análisis transitorio o subtransitorio. También se debe
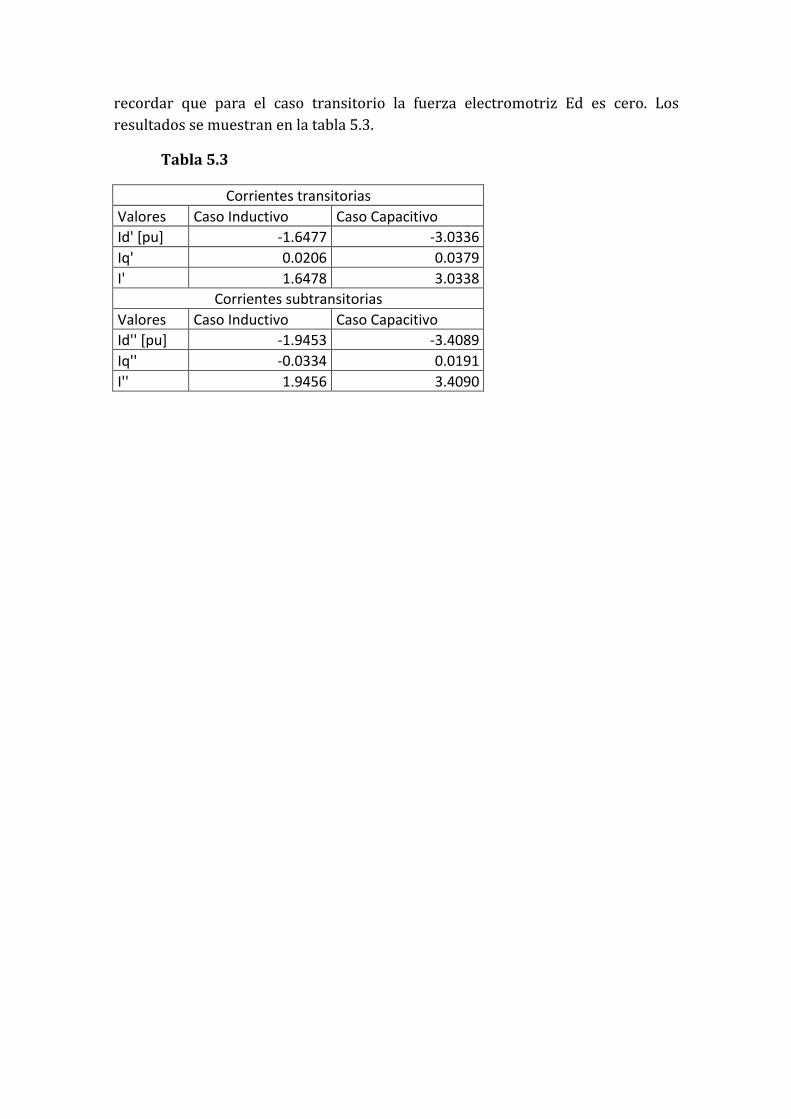
recordar que para el caso transitorio la fuerza electromotriz Ed es cero. Los resultados se muestran en la tabla 5.3.
Tabla 5.3
Corrientes transitorias Valores Caso Inductivo Caso Capacitivo Id' [pu] -‐1.6477 -‐3.0336 Iq' 0.0206 0.0379 I' 1.6478 3.0338
Corrientes subtransitorias Valores Caso Inductivo Caso Capacitivo Id'' [pu] -‐1.9453 -‐3.4089 Iq'' -‐0.0334 0.0191 I'' 1.9456 3.4090