應用攝影測量技術量測渠道流速與流量之 研究 · 河使用lspiv...
TRANSCRIPT
應用攝影測量技術量測渠道流速與流量之
研究 Application of photogrammetric techniques to measure velocity
and discharge of channel
國立聯合大學土木與防災
工程學系 碩士生
國立聯合大學土木與防災
工程學系 教授
國家實驗研究院台灣颱風洪
水研究中心研究員兼副主任
毛培宇 柳文成*
Pei-Yu Mao Wen-Cheng Liu
摘要
攝影測量因具有非接觸之特性,被廣泛應用於各研究領域之中。其中顆粒影
像速度法(Particle Image Velocimetry, PIV)及顆粒追蹤速度法 (Particle Tracking
Velocimetry, PTV)常應用於量測水體之表面流速,進而推算流量。
台灣現行之渠道/河川於常流量時期量測流速時大多使用侵入式測量,量測
人員進入水體中除了增加了量測任務之風險外,也增加了水體之擾動。於洪流量
時期因人員無法進入水體中,渠道/河川皆使用浮標法來進行流速之量測,但因
浮標法之操作方式會造成不確定之人為誤差。因此本研究希望使用非接觸性之攝
影測量,來進行渠道表面流速與流量之量測。
本研究藉由顆粒影像速度法(Particle Image Velocimetry, PIV)及顆粒追蹤速
度法(Particle Tracking Velocimetry, PTV),來量測苗栗市境內一農業用灌溉渠道之
表面流速,並搭配數值水流流速儀量測之斷面平均流速,建立指標流速法;並比
較 PIV 及 PTV 兩種量測方法何者較適用於該渠道,其結果顯示 PIV 量法較適用
於渠道之表面流速量測。影像量測之表面流速可透過指標流速法換算成斷面平均
流速後,以得到流量,因此本研究搭配建置於渠道牆上之水尺來進行連續影像水
位量測,以期本研究所使用之方法日後可朝自動化方向發展。另外,本研究使用
雙相機來擷取渠道影像,希望透過提高影像之解析度來增加影像量測之準確度,
經與單相機量測結果比較後,其均方根誤差與平均絕對誤差均較單相機低,顯示
雙相機所量測之表面流速較單相機量測結果為佳。
*通訊作者,國立聯合大學土木與防災工程學系教授/國家實驗研究院台灣颱風洪水研究中心研究
員兼副主任,36063 苗栗市南勢里聯大 2 號,[email protected]
- 474 -

關鍵字:灌溉渠道、顆粒影像速度法、顆粒追蹤速度法、指標流速法、雙相
機、自動化。
Abstract
Photogrammetric techniques possess noncontact characteristic. It has been
widely used to different research fields. Two methods, Particle Image Velocimetry
(PIV) and Particle Tracking Velocimetry (PTV), are often applied to measure surface
velocity of the water and then to calculate river discharge.
In Taiwan, an invasive method is popularly used to measure velocity in
rivers/channels during normal flow periods. Researchers/staffs come into the water
not only to increase the potential risk, but also to disturb water body. During the high
flow periods, velocity in rivers/channels only can be measured using the buoy method
which easily results in errors and uncertainties due to the manual operations.
Therefore, the utilization of noncontact photogrammetric technique is highly expected
to measure surface velocity and discharge.
In this study, the Particle Image Velocimetry (PIV) and Particle Tracking
Velocimetry (PTV) were adopted to measure surface velocity in the irrigation channel
of the Miaoli City. The flow current meter was also used to measure cross-sectional
averaged velocity for building index-velocity. To find out which method is suitable for
measure surface velocity in the irrigation channel, the measured results with PIV and
PTV methods are compared. It showed that PIV method is suitable to measure surface
velocity comparing to PTV method. Measured surface velocity with PIV method can
be used to calculate the cross-sectional averaged velocity based on the index-velocity
and then to obtain discharge. This study utilized the water gauge which was built on
the channel’s wall to measure the water level based on the imagines for yielding the
discharge by automation. In addition, dual-camera system was used to catch images in
the channel to increase image resolution and to enhance the accuracy of surface
velocity. Comparing the measured results with single camera and dual-camera, the
statistical value of root mean squared error (RMSE) and mean absolute error (MAE)
using dual-camera system is lower than using single camera. The results indicated
dual-camera system would be better for measuring surface velocity.
Keywords: Irrigation channel, Particle Image Velocimetry (PIV), Particle
Tracking Velocimetry (PTV), Index-velocity method, Dual-camera, Automation.
- 475 -

一、前言
近年來攝影測量技術時常被用於測量動態物體上,並發展出顆粒影像速度法
(Particle Image Velocimetry, PIV)及顆粒追蹤速度法 (Particle Tracking Velocimetry,
PTV)。Tsubaki et al. (2011)使用 LSPIV 與 STIV 量測小型河川表面流速,並與常
規方法比較其準確性。Muste et al. (2011)於河川正常狀態與洪水狀態下使用
LSPIV 測量河川之流量,並與 ADCP 測量結果做比較。Bechle et al. (2012)於淡水
河使用 LSPIV 影像量測系統量測淡水河表面流速,並與 ADP 量測之斷面垂直平
均流速建立流速指標。Wang et al. (2013)使用雙相機,並架設於橋上,因相機架
設位置於橋中央,可涵蓋整個河寬。將兩台相機拍攝範圍影像接合後可以增加特
徵點之解析度進而提高整體流速分析之精度。國立聯合大學柳文成教授於 2014
年執行經濟部水利署北區水資源局委辦計畫,也於石門水庫上游集水區之稜角水
位站,使用雙相機建置自動化三維影像系統,並利用 PIV 法與 PTV 量測河川表
面流速,且與數值式水流流速儀量測之結果建置指標流速法並推算其流量。
本研究嘗試應用攝影測量技術之 PIV 法與 PTV 法量測苗栗市一農業灌溉渠
道之表面流速,比較何者較適用於該渠道,並找出攝影測量與實測資料之相關式,
進而推算出渠道流量。且為了增加後續研究之精度,本研究使用了雙相機拍攝之
影像來增加影像解析度,以期提高量測之精度。本研究之最終目的為建立自動化
影像量測系統,為了提高其自動化程度,將使用影像來判斷渠道中之水位高度,
以取代人工量測水位高。
二、研究方法
本研究於苗栗市芒蒲五張犁圳之引水渠道進行表面流速之量測。於現地佈設
控制點後,經由電腦解算相機之內外參數,然後使用顆粒影像速度法(Particle
Image Velocimetry, PIV)與顆粒追蹤速度法 (Particle Tracking Velocimetry, PTV)進
行表面流速之量測,再配合數值水流流速儀所量測之流速使用平均斷面法(王如
意、易任,1979)與 Total Station 所量測之渠道斷面,換算成實際斷面平均流速,
建立指標流速法;有了指標流速法可推求出進行攝影測量時之渠道流量。
除了進行流速與流量的觀測外,本研究也將所量測之表面流速與手持式雷達
波表面流速儀進行比較,找出 PIV 與 PTV 何者較適用於該渠道流速量測。因本
研究流速觀測使用之單相機之方法量測渠道表面流速,爾後,也將比較單相機與
雙相機之量測結果差異性。最後本研究將使用 Matlab 撰寫之程式與標示於渠道
牆上之水尺進行自動判斷水位高與後續是否可實行自動化之探討。研究流程如圖
1 所示:
- 476 -

圖 1 研究流程圖
2.1 共線式
攝影測量基本理論為共線式方程式,由透視原理所建構而成,其中包含 3
項座標點,P 為物點,C 為相機之透視中心,O 為物點對應至相片上之像點;其
特點為 3 點共同存在於同一條直線上,3 者於空間之關係如圖 2 所示
圖 2 透視中心示意圖
共線式基本公式為式(1) 、(2)所示
選定量測地點
設置控制點紙箱 架設攝影測量系統
解算相機內外參數
PIV 法與 PTV 法
進行表面流速量測
建立指標流速
與手持式雷達波
量測結果比較
計算流量
數值水流流速儀
量測各深度流速
Total Station
量測渠道斷面
使用影像
自動判斷水位
高
結果與討論
進行單雙相機
量測結果比較
P
O
C
- 477 -

11 12 13
31 32 33
c c c
c u
c c c
r x x r y y r z zu u f
r x x r y y r z z
(1)
21 22 23
31 32 33
c c c
c v
c c c
r x x r y y r z zv v f
r x x r y y r z z
(2)
其中,
uf 、vf :由內方位參數焦距 d 與尺度轉換而得;
cx 、
cy 、
cz :透鏡中心在物空間座標系統的座標值;
cu 、
cv 、d :透鏡中心在像空間座標系統的座標值;
11r ~
33r :旋轉角參數由、、組合而成;
x、 y 、 z
:物點在物空間座標系統的座標值;
u 、v
:對應像點在像空間座標系統的座標值。
2.2 空間交會模式
空間交會模式分別有空間後方交會模式與空間前方交會模式,後方交會模式
(如圖 3 所示)是由已知控制點之物座標與對應像點之像座標,計算出影像中的內、
外方位參數。每個控制點與所對應的像點可以形成 2 個方程式,共線式共 9 個參
數,因此至少需要有 5 個控制點提供 10 個方程式,方能解算 9 個參數。
空間前方交會模式則是透過空間後方交會模式所求出之相機內、外方位參數,
代回共線式方程式最後可以得出我們所求之物空間座標點。在空間前方交會模式
中,要解算目標物之座標(X,Y,Z) 3 個變數,理應要有 2 台相機,因每個目標點於
不同相機所拍攝影像中對應的像點可提供 2 個共線式方程式,2 台相機可提供 2
張影像暨 2 個對應像點,因此可提供 4 個共線式方程式解算 3 個變數。但本研究
只有使用 1 台相機只能解算 2 個變數,因此需另外輸入目標物與相機透視中心之
高度差,因不同的高度差所機算之目標物之座標會不一樣,示意圖如圖 4 所示。
圖 3 空間後方交會模式示意圖 圖 4 空間前方交會模式示意圖
C 透視中心
C 透視中心
Z1平面
Z2平面
O (U,V)
P (X1,Y1,Z1)
P (X2,Y
2,Z
2)
- 478 -
2.3 影像匹配
影像匹配指的是,於 A 與 B 兩張影像中尋找相同之共軛像點。在傳統上是
使用人工配對去指定同一物點分別在兩張影像上的位置,因此在攝影測量朝自動
化演進的過程中,數位影像的發明是很重要的里程碑。數位影像是指將傳統影像
切割成數千萬個像素區塊,並給予每個區塊一個數字,透過影像上的數字計算,
可以計算出 A 影像上像點之目標物於 B 影像上對應像點之位置。像素之數字稱
為灰度值或 RGB 值(Red-Green-Blue)。影像匹配較為常見方法共有三種(王樹根,
2009)為相關係數法、斜方差法及最小二乘匹配法。本研究採用相關係數法。
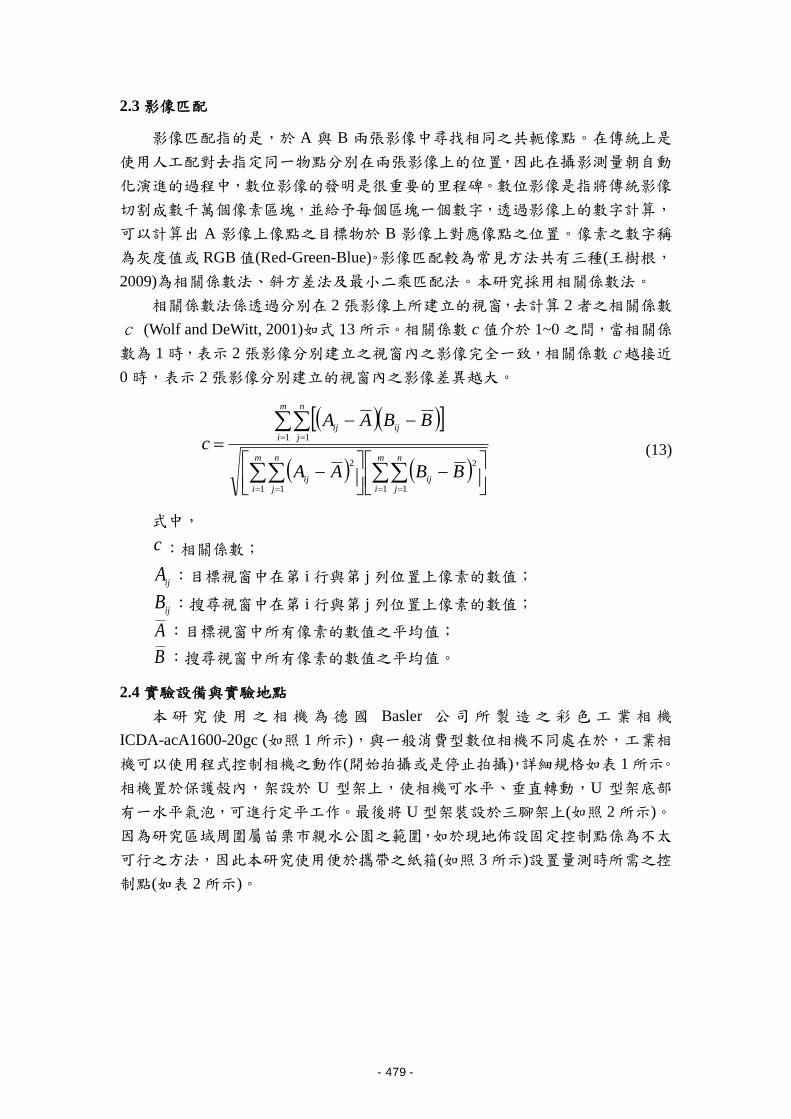
相關係數法係透過分別在 2 張影像上所建立的視窗,去計算 2 者之相關係數
c (Wolf and DeWitt, 2001)如式 13 所示。相關係數 c 值介於 1~0 之間,當相關係
數為 1 時,表示 2 張影像分別建立之視窗內之影像完全一致,相關係數c越接近
0 時,表示 2 張影像分別建立的視窗內之影像差異越大。
m
i
n
jij
m
i
n
jij
m
i
n
jijij
BBAA
BBAA
c
1 1
2
1 1
2
1 1 (13)
式中,
c:相關係數;
ijA :目標視窗中在第 i 行與第 j 列位置上像素的數值;
ijB :搜尋視窗中在第 i 行與第 j 列位置上像素的數值;
A:目標視窗中所有像素的數值之平均值;
B :搜尋視窗中所有像素的數值之平均值。
2.4 實驗設備與實驗地點
本研究使用之相機為德國 Basler 公司所製造之彩色工業相機
ICDA-acA1600-20gc (如照 1 所示),與一般消費型數位相機不同處在於,工業相
機可以使用程式控制相機之動作(開始拍攝或是停止拍攝),詳細規格如表 1 所示。
相機置於保護殼內,架設於 U 型架上,使相機可水平、垂直轉動,U 型架底部
有一水平氣泡,可進行定平工作。最後將 U 型架裝設於三腳架上(如照 2 所示)。
因為研究區域周圍屬苗栗市親水公園之範圍,如於現地佈設固定控制點係為不太
可行之方法,因此本研究使用便於攜帶之紙箱(如照 3 所示)設置量測時所需之控
制點(如表 2 所示)。
- 479 -

照 1 Basler 彩色工業相機 照 2 攝影測量設備示意圖
表 1 Basler 工業相機規格
相機規格
照片解析度 (pixel) 1624 x 1234
單位相素大小 (pixel) 4.4 x 4.4
影像感測器大小 1/1.8"
每秒連拍張數 (fps) 20
鏡頭焦距 (mm) 15
光圈 f/2.0
表 2 控制點座標資料
控制點編號
X (cm)
Y (cm)
Z (cm)
A 0 0 0 B 22.5 0 0 C 11.0 12.5 0 D 16.9 30.1 0 E 23.4 42.2 0 F 10.2 24.7 3.7 G 10.2 41.7 3.6 H 10.2 24.7 29.0 I 10.2 41.7 29.1 J 7.4 24.7 29.0 K 2.7 41.7 29.1
照 3 紙箱控制點
為了與顆粒影像流速法(PIV)和顆粒追蹤流速法(PTV)所分析出之表面平均
流速結果進行比較,本研究使用美國 Stalker 公司所生產之手持式雷達波流速儀
(如照 4 所示)量測渠道之表面流速,將其量測結果分別與 PIV 法與 PTV 法進行
比較後,並探討 PIV 法與 PTV 法何者較適用於渠道表面流速量測。
本研究最終目的是建置指標流速法,為了取得實測之斷面平均流速,本研究
使用美國 GLOBAL WATER公司所生產之FP111 數值水流流速儀(如照5所示),
以取得不同深度之流速以求得量測區域之實測流量,除以量測區域之通水斷面來
鏡頭 相機
- 480 -

得知斷面平均流速進而與攝影測量量測之表面流速建立指標流速。
照 4 手持式雷達波流速儀 照 5 數值水流流速儀
三、實驗數據討論與分析
3.1 PIV 與 PTV 量測結果比較
本研究使用了顆粒影像流速法(PIV)與顆粒追蹤流速法(PTV)來進行渠道表
面流速之分析。PIV 法除了可分析出渠道表面平均流速外,也會呈現出渠道表面
水流之方向和匹配成功之位置,如圖 5 中,方格內無白點與箭頭之方格代表此區
域匹配失敗,此方格區域無流速與流向,反之有白點與箭頭之方格區域為匹配成
功之資料點。與 PIV 法相同,PTV 法也會呈現出匹配成功之流速與其流向,但
與 PIV 法不同,PTV 法流速不是代表該區域內之數值,PTV 法所匹配成功的是
該特徵點之流速與流向,如圖 6 中所呈現的流向皆為水面上之特徵物(樹葉)之流
向,因特徵物漂流於水中,所以亦等同於水流之流向。
圖 5 PIV 法匹配成功流向圖 圖 6 PTV 法匹配成功之流向
將所量測的 40個場次所計算出的 PIV法與 PTV法之表面平均流速製作成散
佈圖來表示兩者間之關係(如圖 7 所示),經由散佈圖我們可以看出 PIV 與 PTV
之結果並沒有完全的吻合,可以看出大部分的數據較集中於散步圖右下方的三角
形中,表示藉由 PTV 法所量測出之表面平均流速是較 PTV 法快的,原因為 PIV
法為整個擷取畫面範圍之流速值的平均,PTV 法則是藉由匹配目標物來計算出
流速值,當目標物至於水面上時,正常狀況下皆會向水流較快之區域集中,因此
PTV 所量測到之流速會較 PIV 法來得快。
- 481 -

圖 7 PTV 法與 PIV 法比較圖
3.2 PIV、PTV 與手持式雷達波流速儀量測結果比較
本研究於每個攝影測量場次擷取完渠道表面之影像後,即使用手持式雷達波
表面流速儀進行表面流速量測,為了量測之準確度,本研究進行手持式雷達波表
面流速儀進行表面流速量測時會將渠道斷面分為 5 個等分進行表面流速量測,如
圖 8 所示,現地量測實際之情行為照 9 中由左到右按照 1~5 之順序進行量測,測
得渠道斷面 5 筆面流速資料後,將其平均後所得之表面平均流速,共 40 筆流速
資料與 PIV 法和 PTV 法進行數據之比較,並討論 PIV 法與 PTV 法何者較適合使
用於渠道表面流速量測。
圖 8 雷達波表面流速儀量測位置示意圖 圖 9 雷達波表面流速儀現地量測
將 PIV 法與 PTV 法之量測結果分別與手持式雷達波表面流速儀進行比較,
並繪製成散佈圖。PIV 法與手持式雷達波進行比較後,如圖 10 所示,其 RMSE
值為 0.0716 m/s,MAE 值為 0.0560 m/s;PTV 法與手持式雷達波進行比較後,如
1 2 3 4 5
左
右
- 482 -

圖 11 所示,其 RMSE 值為 0.0749 m/s,MAE 值為 0.0644 m/s,透過統計數值比
較, PIV 法之誤差值優於 PTV 法,所以我們可以得出 PIV 法用於量測渠道流量
之結果較 PTV 法之量測結果好。
圖 10 雷達波流速儀與 PIV 法比較圖 圖 11 雷達波流速儀與 PIV 法比較圖
3.3 指標流速法推求渠道流量
在建立指標流速之前,我們必須取得該渠道的實測斷面平均流速。本研究使
用數值水流流速儀(如照 5 所示)來取得不同深度之流速資料,其量測方向及點位
與手持式雷達波相同(如圖 8、圖 9 所示),並透過平均斷面法之公式(王如意、易
任,1979),搭配 Total Station 所量測之渠道斷面,換算成實測斷面平均流速。
將所量測到之實測斷面流速與攝影測量所量測到之表面平均流速繪製成散
佈圖並進行回歸計算,計算後,斷面平均流速與 PIV 法量測之平均表面流速兩
者之線性關係斜率為 0.8247,相關係數(R)為 0.87 (如圖 12 所示);斷面平均流速
與 PTV 法量測之平均表面流速兩者之線性關係斜率為 0.7683,相關係數(R)為
0.76 (如圖 13 所示)。我們可以藉由所計算出的關係式,將攝影測量所量測到之
表面平均流速換算為斷面平均流速,經由相關係數(R)值的比較,PIV 法換算為
斷面平均流速時,其準確度較 PTV 法佳。
圖 12 PIV 法之指標流速圖 圖 13 PTV 法之指標流速圖
有了斷面平均流速後,將其乘上通水斷面積,即可得出攝影測量所推求之渠
- 483 -
道流量。將所量測到之實測流速與攝影測量推求之流速繪製成散佈圖來進行比較,
如圖 14、圖 15 所示。
圖 14 PIV 法之指標流速圖 圖 15 PTV 法之指標流速圖
PIV 法推算之流量與實測流量之均方根誤差(RMSE)為 0.1255 m3/s,平均絕
對誤差(MAE)為 0.0998 m3/s;PTV 法推算之流量與實測流量均方根誤差(RMSE)
為 0.2065 m3/s,平均絕對誤差(MAE)為 0.1548 m
3/s。透過誤差值得的比較,PIV
法再進行流量估算時,是較準確的。
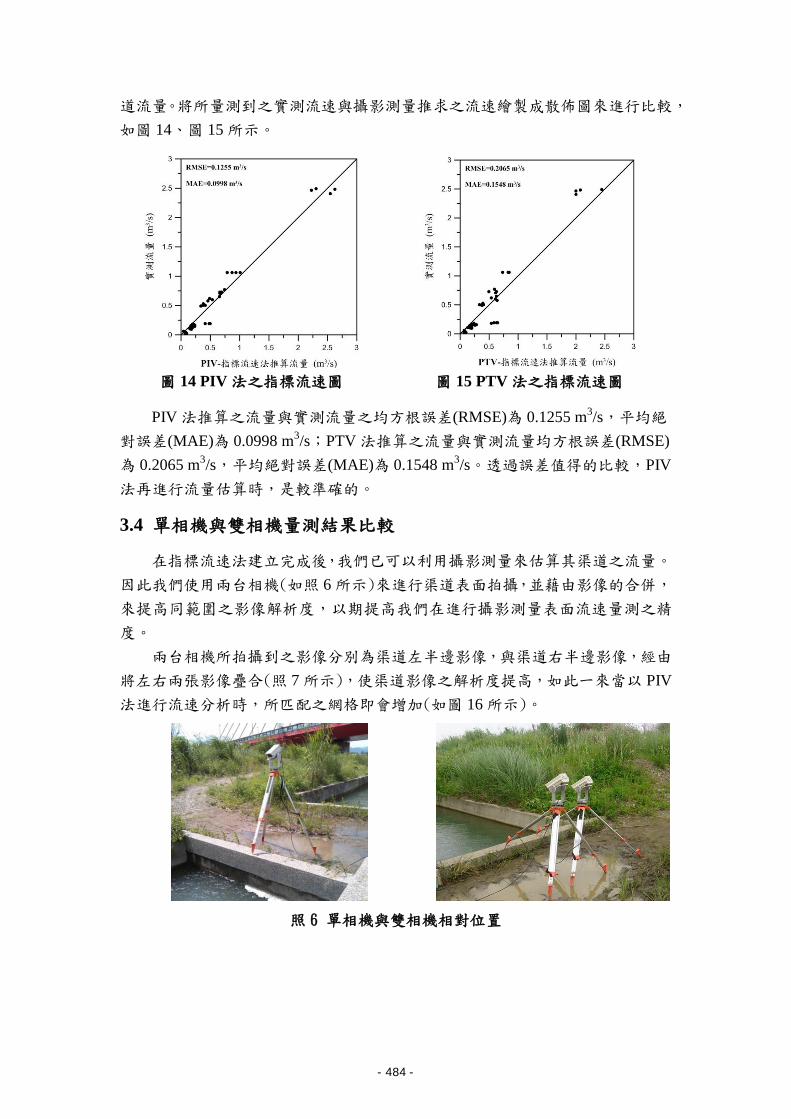
3.4 單相機與雙相機量測結果比較
在指標流速法建立完成後,我們已可以利用攝影測量來估算其渠道之流量。
因此我們使用兩台相機(如照 6 所示)來進行渠道表面拍攝,並藉由影像的合併,
來提高同範圍之影像解析度,以期提高我們在進行攝影測量表面流速量測之精
度。
兩台相機所拍攝到之影像分別為渠道左半邊影像,與渠道右半邊影像,經由
將左右兩張影像疊合(照 7 所示),使渠道影像之解析度提高,如此一來當以 PIV
法進行流速分析時,所匹配之網格即會增加(如圖 16 所示)。
照 6 單相機與雙相機相對位置
- 484 -

(a)
(b)
(c)
照 7 左右相機影像(a)左相機擷取之影像;(b)右相機擷取之影像;(c)左
右兩張影像疊合後之影像
圖 16 左右影像疊合後分析範圍示意圖
為了比較出雙相機與單相機何者量測精度較高,在這裡本研究也一樣使用了
雷達波表面流速儀與攝影測量來進行比較。本研究於單像機與雙像機之比較進行
了 8 個場次的實驗,並將其數據繪製成散佈圖,如圖 17、圖 18 所示。
圖 17 雷達波流速儀與單相機散佈圖 圖 18 雷達波流速儀與雙相機散佈圖
- 485 -
由誤差值來看,單相機之 RMSE 為 0.0843 m/s,MAE 為 0.0688 m/s;雙相機
之 RMSE 為 0.0731 m/s,MAE 為 0.0611 m/s,雙相機之 RMSE、MAE 兩項統計
誤差值均低於單像機,這表示於渠道進行量測時,使用雙相機進行擷取影像後將
影像合併提高量測範圍影像解析度亦會提高影像量測之精度。
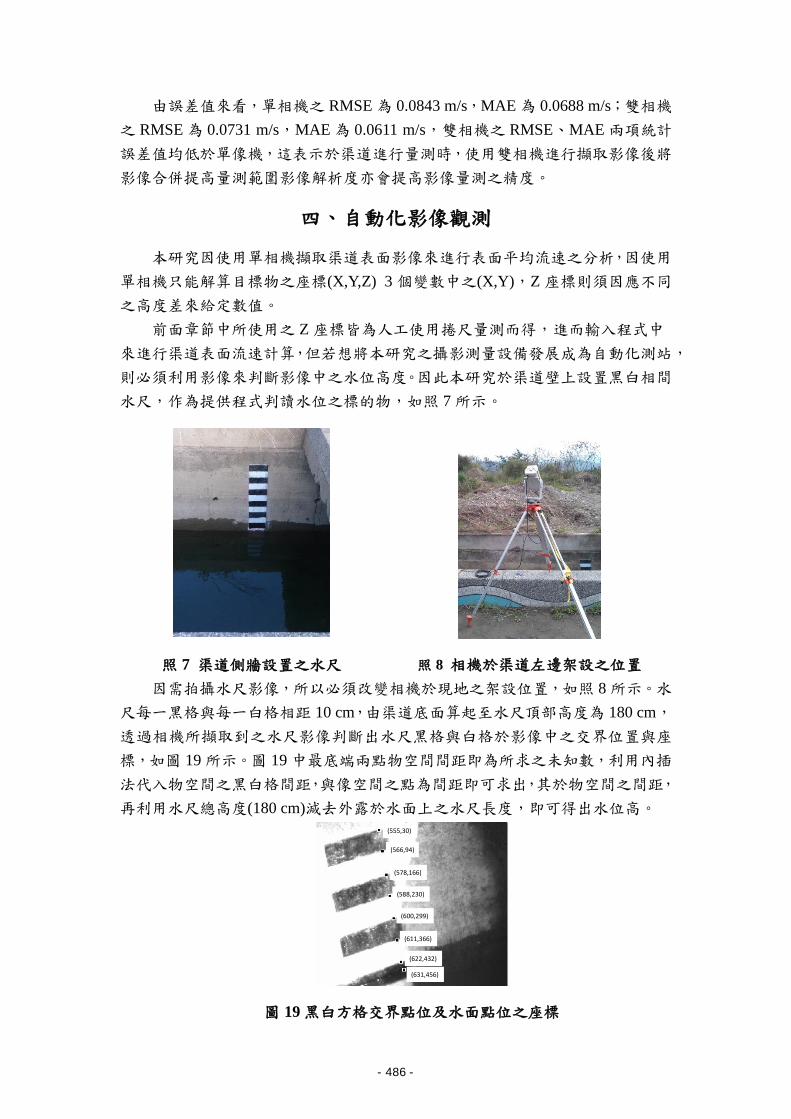
四、自動化影像觀測
本研究因使用單相機擷取渠道表面影像來進行表面平均流速之分析,因使用
單相機只能解算目標物之座標(X,Y,Z) 3 個變數中之(X,Y),Z 座標則須因應不同
之高度差來給定數值。
前面章節中所使用之 Z 座標皆為人工使用捲尺量測而得,進而輸入程式中
來進行渠道表面流速計算,但若想將本研究之攝影測量設備發展成為自動化測站,
則必須利用影像來判斷影像中之水位高度。因此本研究於渠道壁上設置黑白相間
水尺,作為提供程式判讀水位之標的物,如照 7 所示。
照 7 渠道側牆設置之水尺 照 8 相機於渠道左邊架設之位置
因需拍攝水尺影像,所以必須改變相機於現地之架設位置,如照 8 所示。水
尺每一黑格與每一白格相距 10 cm,由渠道底面算起至水尺頂部高度為 180 cm,
透過相機所擷取到之水尺影像判斷出水尺黑格與白格於影像中之交界位置與座
標,如圖 19 所示。圖 19 中最底端兩點物空間間距即為所求之未知數,利用內插
法代入物空間之黑白格間距,與像空間之點為間距即可求出,其於物空間之間距,
再利用水尺總高度(180 cm)減去外露於水面上之水尺長度,即可得出水位高。
圖 19 黑白方格交界點位及水面點位之座標
(555,30)
(566,94)
(578,166)
(588,230)
(600,299)
(611,366)
(622,432)
(631,456)
- 486 -
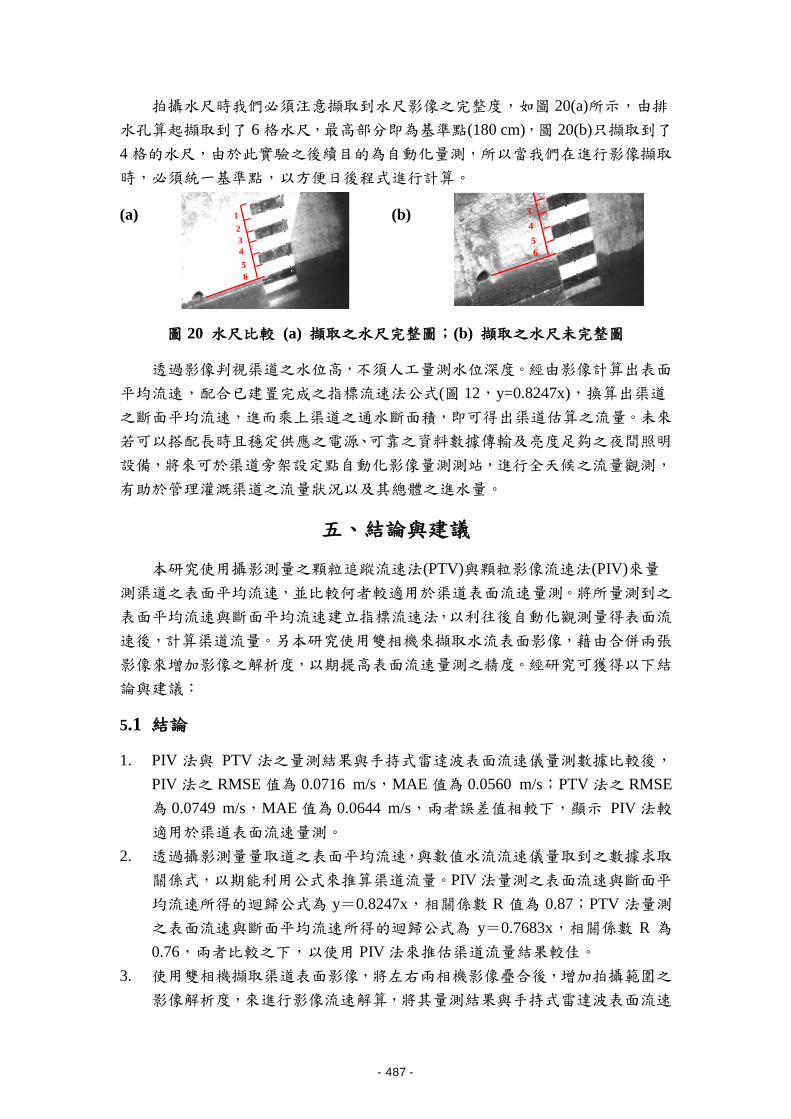
拍攝水尺時我們必須注意擷取到水尺影像之完整度,如圖 20(a)所示,由排
水孔算起擷取到了 6 格水尺,最高部分即為基準點(180 cm),圖 20(b)只擷取到了
4 格的水尺,由於此實驗之後續目的為自動化量測,所以當我們在進行影像擷取
時,必須統一基準點,以方便日後程式進行計算。
(a)
(b)
圖 20 水尺比較 (a) 擷取之水尺完整圖;(b) 擷取之水尺未完整圖
透過影像判視渠道之水位高,不須人工量測水位深度。經由影像計算出表面
平均流速,配合已建置完成之指標流速法公式(圖 12,y=0.8247x),換算出渠道
之斷面平均流速,進而乘上渠道之通水斷面積,即可得出渠道估算之流量。未來
若可以搭配長時且穩定供應之電源、可靠之資料數據傳輸及亮度足夠之夜間照明
設備,將來可於渠道旁架設定點自動化影像量測測站,進行全天候之流量觀測,
有助於管理灌溉渠道之流量狀況以及其總體之進水量。
五、結論與建議
本研究使用攝影測量之顆粒追蹤流速法(PTV)與顆粒影像流速法(PIV)來量
測渠道之表面平均流速,並比較何者較適用於渠道表面流速量測。將所量測到之
表面平均流速與斷面平均流速建立指標流速法,以利往後自動化觀測量得表面流
速後,計算渠道流量。另本研究使用雙相機來擷取水流表面影像,藉由合併兩張
影像來增加影像之解析度,以期提高表面流速量測之精度。經研究可獲得以下結
論與建議:
5.1 結論
1. PIV 法與 PTV 法之量測結果與手持式雷達波表面流速儀量測數據比較後,
PIV 法之 RMSE 值為 0.0716 m/s,MAE 值為 0.0560 m/s;PTV 法之 RMSE
為 0.0749 m/s,MAE 值為 0.0644 m/s,兩者誤差值相較下,顯示 PIV 法較
適用於渠道表面流速量測。
2. 透過攝影測量量取道之表面平均流速,與數值水流流速儀量取到之數據求取
關係式,以期能利用公式來推算渠道流量。PIV 法量測之表面流速與斷面平
均流速所得的迴歸公式為 y=0.8247x,相關係數 R 值為 0.87;PTV 法量測
之表面流速與斷面平均流速所得的迴歸公式為 y=0.7683x,相關係數 R 為
0.76,兩者比較之下,以使用 PIV 法來推估渠道流量結果較佳。
3. 使用雙相機擷取渠道表面影像,將左右兩相機影像疊合後,增加拍攝範圍之
影像解析度,來進行影像流速解算,將其量測結果與手持式雷達波表面流速
6
5
4
3
2
1
6
5
4
3
- 487 -

儀量測數據進行比較,RMSE 值為 0.0731 m/s,MAE 值為 0.0611 m/s;單相
機與手持式雷達波表面流速儀量比較之RMSE為 0.0843 m/s,MAE為 0.0688
m/s,結果顯示增加影像之解析度將有助於提高影像量測之準確度。
4. 透過影像自動判視水位高度,無須量測人員進入水中量測水位,降低了作業
風險,也提高了量測的便利性。藉由自動判視水位高度,由 PIV 法量測之
表面流速,再透過指標流速法換算為斷面平均流速,將其結果乘上通水斷面
即可以自動化的程序,得到渠道之流量。
5.2 建議
1. 雖然於長期數據比較來看, PIV 法優於 PTV 法,但兩種方法各有其優缺
點,如即時需要獲取流速資料時,可依各水流表面之情形來判斷使用何種方
法。如遇水面波紋過於平靜,PIV 法難以匹配,這時可藉由水面上之特徵物
(如:樹葉、泡沫等)來進行 PTV 法量測表面流速,其效果將會較 PIV 法佳。
2. 雙相機量測雖然精度較高,但與單相機之精度相差不大,應為本研究之量測
區域為尺寸較小之渠道,其解析度增加有限所致。若想使雙相機量測之精度
明顯的大於單相機之精度,可將儀器架設於範圍較大之區域進行長時間量測,
則雙相機與單相機之量測精度應會有明顯差異。
六、參考文獻
1. Bechle, J., Wu, C. H., Liu, W. C., Kimura, N., 2012. Development and
application of an automated river-estuary discharge imaging system. Journal of
Hydraulic Engineering, ASCE, 138(4), 327-339.
2. Muste, M., Ho, H. C., Kim, D., 2011. Considerations on direct steam flow
measurements using video imagery: outlook and research needs. Journal of
Hydro-Environment Research, 5(4), 289-300.
3. Tsubaki, R., Fujita, I., Tsutsumi, S., 2011. Measurement of the flood discharge of
a small-sized river using an existing digital video recording system. Journal of
Hydro-Environment Research, 5(4), 313-321.
4. Wang, F., Xu, B., Xu, M., Shi , J., Jia, L., Li, C., 2013. A Large-scale
particle image velocimetry system based on dual-camera field of view stitching.
Sensors & Transducers, 157(10), 234-239.
5. 王如意、易任,應用水文學, 318-329 頁,國立編譯館出版,茂昌圖書公司,
台北市,1979。
6. 王樹根,攝影測量原理與應用,49-51 頁,武漢大學出版社,中國湖北省武
漢市,2009。
7. 國立聯合大學,以三維立體影像技術量測石門水庫集水區河川表面流速及流
量研究計畫,經濟部水利署北區水資源局,2014。
- 488 -