designing a site for video analytics
TRANSCRIPT
采用 Avigilon™ 自学习视频分析功能设计站点
Avigilon 具有自学习视频分析的高清摄像机和设备可以轻松安装并可以获得积极的分析结果,而无需持续软件调整。Avigilon 的专利自学习视频分析可以根据摄像机的视场 (FoV) 自动校准,无需配置或调整。
要使视频分析有效执行,必须正确安装分析摄像机(或连接到分析设备的摄像机)。在典型应用中,如果人员侦测对视场有效,则车辆侦测将同样准确。车辆侦测范围可能远于人员侦测范围,因为车辆通常比人员更大更醒目。
摄像机必须:
l 位于高度和角度准则内。
l 与水平和地平面水平(针对室外或大型室内区域)。
l 安装位置位于感兴趣区域具有足够光线且没有障碍的地方。
l 位于感兴趣区域的范围内,以让视频分析识别对象。
l 监控具有足够对比度的场景以对场景中的对象进行分类。例如,在冰雪覆盖的 FoV 中穿白色衣服行走的人员的效果可能较差。
以下信息提供了一套基本安装参数。有关不同于列出的建议的站点要求,或者如果存在疑问,请在安装摄像机之前咨询 Avigilon 代表。
高度、角度与视角 2
反射光 2
自适应红外线 3
目标勒克斯 3
障碍 3
覆盖范围 4
对象速度 5
摄像机位置 5
自学习 6
了解更多信息 6
采用 Avigilon™ 自学习视频分析功能设计站点 1
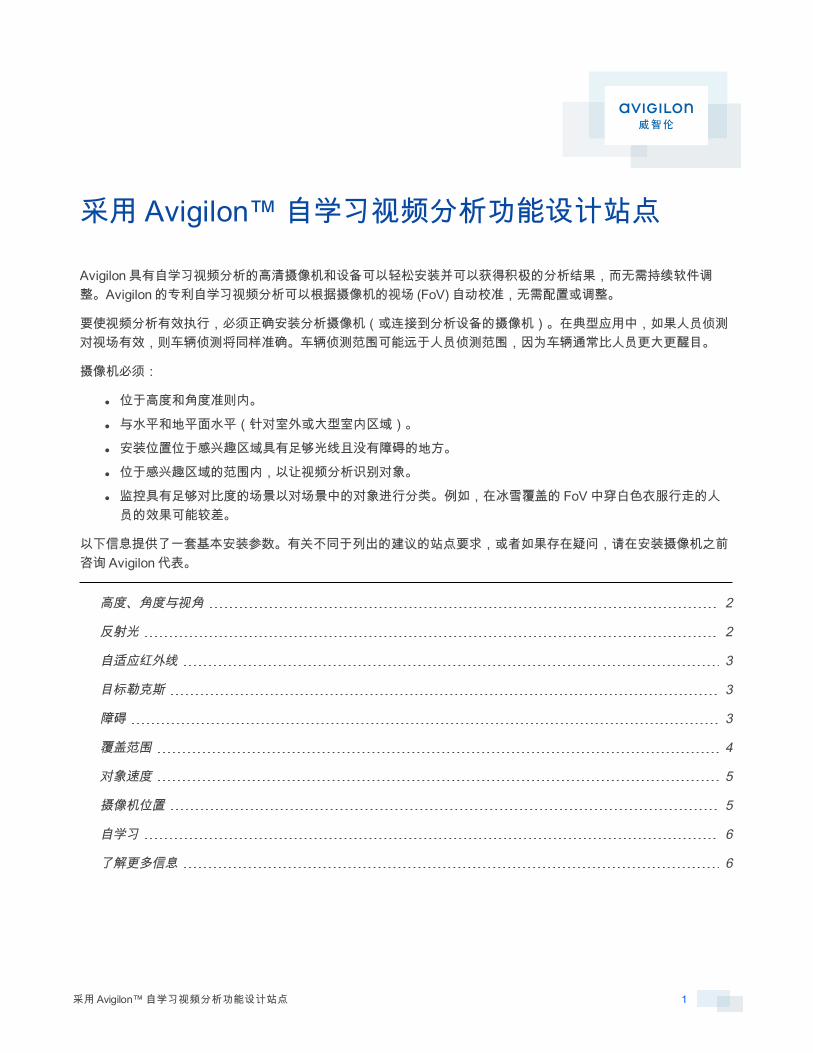
高度、角度与视角
室外应用
距离地面 2.8 m (9 英尺) 或更高并且水平向下倾斜不超过 45 度(推荐角度是 30 度)安装时,摄像机视频分析功能最准确。为尽量减少振动和移动,应将摄像机安装在稳定的表面。
Avigilon 自学习视频分析需要视线与水平线平行,并且希望人物在视场范围内直立走动。人员和车辆垂直于 FoV 移动的效果比对象靠近或远离摄像机更佳。
室内应用
Avigilon 视频分析设备支持旨在仅侦测人员的室内模式。室内模式具有其他外观模式数据,以补偿室内环境下的大量潜在阻塞(例如家具)。
室内应用指南类似于室外应用。FoV 中的人员目标应该相对直立且未失真。安装高度可能较低,但是您希望侦测的对象或人员不应大于整个 FoV 高度的约 2/3。对于室内架空模式,FoV 中不需要躯干。
注意: 此时不支持使用广角或鱼眼/全景镜头。
请注意,Avigilon 采用纵向模式安装的摄像机必须使用 Avigilon Control Center™ 软件进行配置。
反射光
将摄像机放置在太阳、车头灯或其他光源不会直接照射到镜头的位置。如果明亮光源直接照射到摄像机,则摄像机可能会暂时“失明”。请注意间接光源,以避免镜头眩光和图像对比度损失。具有宽动态范围 (WDR) 的摄像机在某些情况下能够克服这一问题,但是应该始终避免直接光源。
2 高度、角度与视角
自适应红外线
自适应红外线功能通过动态调整红外线输出,从而避免夜间光线变化时场景中的过饱和现象。但是,这也可能使对象的轮廓模糊不清,并对视频分析的准确度造成不良影响。
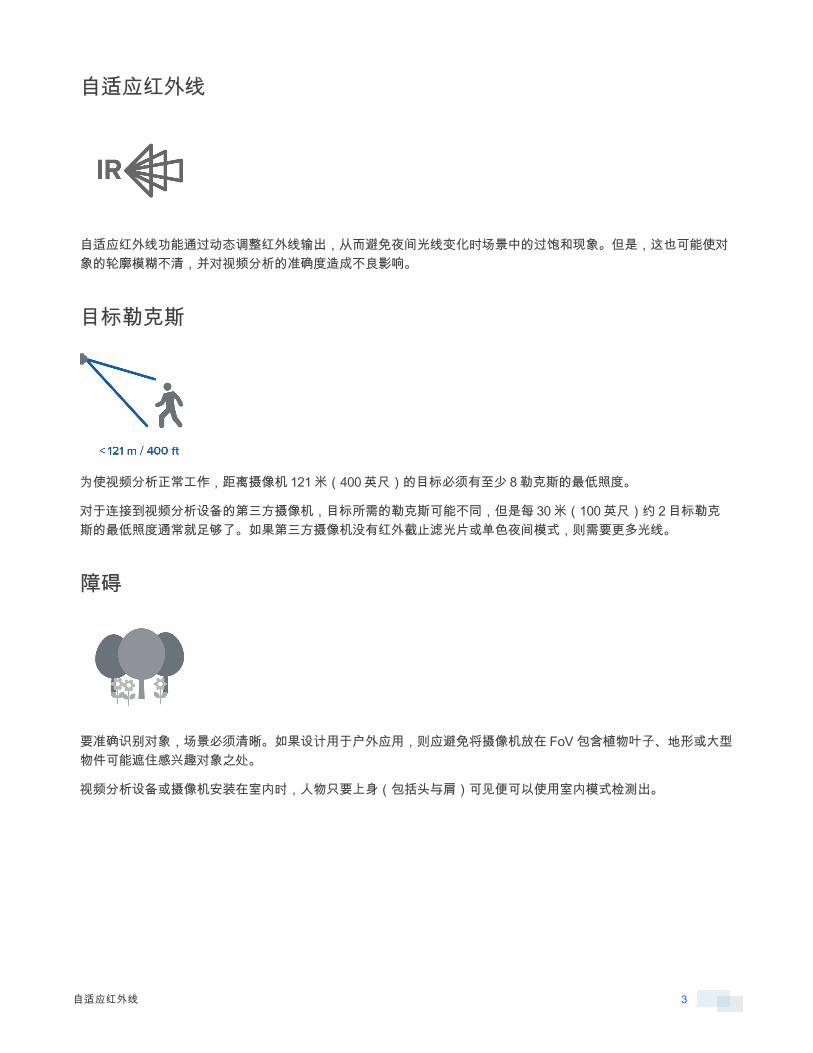
目标勒克斯
为使视频分析正常工作,距离摄像机 121 米(400 英尺)的目标必须有至少 8 勒克斯的最低照度。
对于连接到视频分析设备的第三方摄像机,目标所需的勒克斯可能不同,但是每 30 米(100 英尺)约 2 目标勒克斯的最低照度通常就足够了。如果第三方摄像机没有红外截止滤光片或单色夜间模式,则需要更多光线。
障碍
要准确识别对象,场景必须清晰。如果设计用于户外应用,则应避免将摄像机放在 FoV 包含植物叶子、地形或大型物件可能遮住感兴趣对象之处。
视频分析设备或摄像机安装在室内时,人物只要上身(包括头与肩)可见便可以使用室内模式检测出。
自适应红外线 3
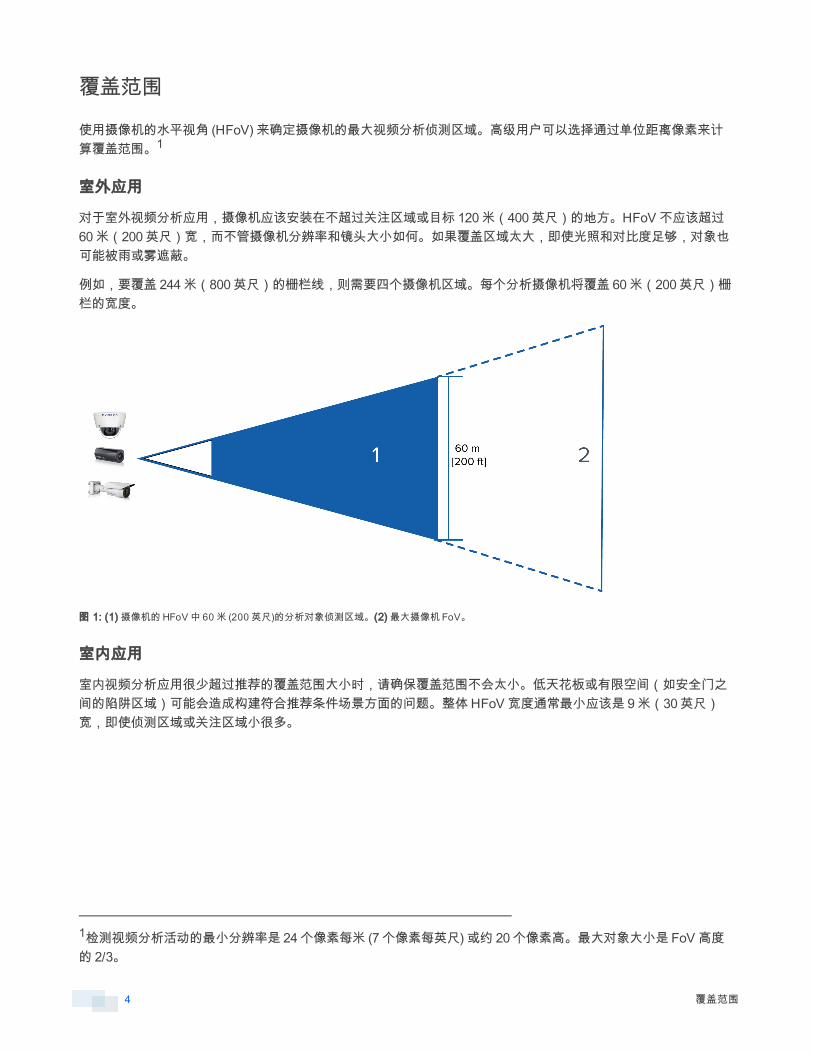
覆盖范围
使用摄像机的水平视角 (HFoV) 来确定摄像机的最大视频分析侦测区域。高级用户可以选择通过单位距离像素来计算覆盖范围。1
室外应用
对于室外视频分析应用,摄像机应该安装在不超过关注区域或目标 120 米(400 英尺)的地方。HFoV 不应该超过 60 米(200 英尺)宽,而不管摄像机分辨率和镜头大小如何。如果覆盖区域太大,即使光照和对比度足够,对象也可能被雨或雾遮蔽。
例如,要覆盖 244 米(800 英尺)的栅栏线,则需要四个摄像机区域。每个分析摄像机将覆盖 60 米(200 英尺)栅栏的宽度。
图 1: (1) 摄像机的 HFoV 中 60 米 (200 英尺)的分析对象侦测区域。(2) 最大摄像机 FoV。
室内应用
室内视频分析应用很少超过推荐的覆盖范围大小时,请确保覆盖范围不会太小。低天花板或有限空间(如安全门之间的陷阱区域)可能会造成构建符合推荐条件场景方面的问题。整体 HFoV 宽度通常最小应该是 9 米(30 英尺)宽,即使侦测区域或关注区域小很多。
1检测视频分析活动的最小分辨率是 24 个像素每米 (7 个像素每英尺) 或约 20 个像素高。最大对象大小是 FoV 高度的 2/3。
4 覆盖范围
对象速度
视频分析设备必须能够观察移动对象至少 2 秒才能将其归类——推荐 5 秒或更长时间。
如果预期的是快速横向移动的车辆,请使用视场范围更宽的设计,以便增加观察时间。
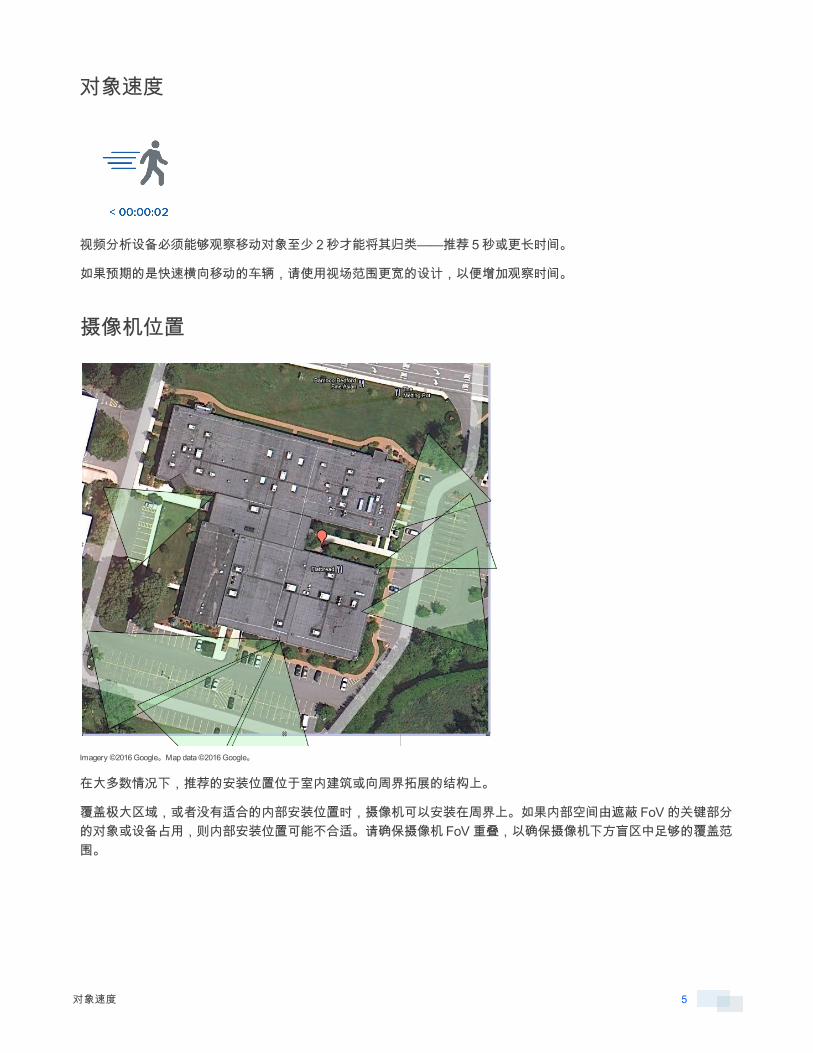
摄像机位置
Imagery ©2016 Google。Map data ©2016 Google。
在大多数情况下,推荐的安装位置位于室内建筑或向周界拓展的结构上。
覆盖极大区域,或者没有适合的内部安装位置时,摄像机可以安装在周界上。如果内部空间由遮蔽 FoV 的关键部分的对象或设备占用,则内部安装位置可能不合适。请确保摄像机 FoV 重叠,以确保摄像机下方盲区中足够的覆盖范围。
对象速度 5

Imagery ©2016 Google。Map data ©2016 Google。
自学习
Avigilon 视频分析通过观察场景中的人员活动并执行自学习过程工作。如果自学习过程在初始分析校准期间没有足够的人员活动,则可能会增加误报且必须使用示例教学 (TBE) 流程。
如果自学习没有启动或启动后自行关闭,使已归类的对象未突出显示,您可以选择重新启用自学习(但不是必须)。如果启用自学习时您收到许多误报,则请将其关闭并查看是否有帮助。如果有帮助,请禁用自学习功能。
了解更多信息
有关不同于列出的建议的站点要求,或者如果存在疑问,请在安装摄像机之前咨询 Avigilon 代表。
© 2015 - 2016, AvigilonCorporation. 保留所有权利。 AVIGILON、AVIGILON 徽标和 AVIGILON CONTROL CENTER 是 Avigilon Corporation 的商标。本文档提及的其他产品名称可能是其各自所有者的商标。本文档的商标旁边缺少符号 ™ 和 ® 并不是对相关商标所有权的放弃权项声明。Avigilon Corporation 利用在美国及全球其他司法体系中发布的专利保护其创新:http://www.avigilon.com/patents 除非以书面形式明确说明,否则 Avigilon 公司或其授权人的任何版权、工业设计、商标、专利或其他知识产权均不授予许可。
Avigilon 公司http://www.avigilon.com
PDF-DESIGNH3A-B
修订版:1 和 CN。
20160209
6 自学习