diap- balanceo
TRANSCRIPT
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 1/73
1

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 2/73
2
Objetivo del curso
• Comprenderán las técnicas de balanceo de
rotores, así también les permitirá resolver la
mayoría de los problemas que seencuentren con respecto al desequilibrio,
tanto en sitio donde trabaja la máquina
como en el taller de equilibrado.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 3/73
3
El desequilibrio se define como:
• La distribución desigual de peso de un rotor
sobre su línea central rotativa.
• La condición que existe en un rotor cuando
la fuerza o el movimiento de vibración se
transmite a sus cojinetes a causa de lasfuerzas centrifugas.

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 4/73
4
Causas
• Los rotores de
fundición tendrán
sopladuras o agujerosocasionados por dicho
proceso. El vacío que
se forma puede ser la
causa de undesequilibrio
importante.
• Sopladuras
ocasionadas por
fundiciones
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 5/73
5
Causas
• La línea de centro
geométrica no
coincide con la líneade centro rotativa.
• Sopladuras ocasionadas
por fundiciones
• Excentricidad

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 6/73
6
Causas
• Algunos fabricantes
cuando se realiza un
equilibrio de componentes
utilizan cuños completos,
medio cuño o quizás sin
cuños; y tal vez otro
fabricante equilibro sin
cuño, por consiguiente
cuando se armen estos
componentes se producirá
un desequilibrio.
• Sopladuras ocasionadas por
fundiciones
• Excentricidad
• Añadiduras de cuños
y cuñeros
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 7/737
Causas
• Es cuando cambia la
forma del rotor alterando
su equilibrio inicial.
• Sopladuras ocasionadas por
fundiciones
• Excentricidad
• Añadiduras de cuños y
cuñeros
• Distorsión
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 8/738
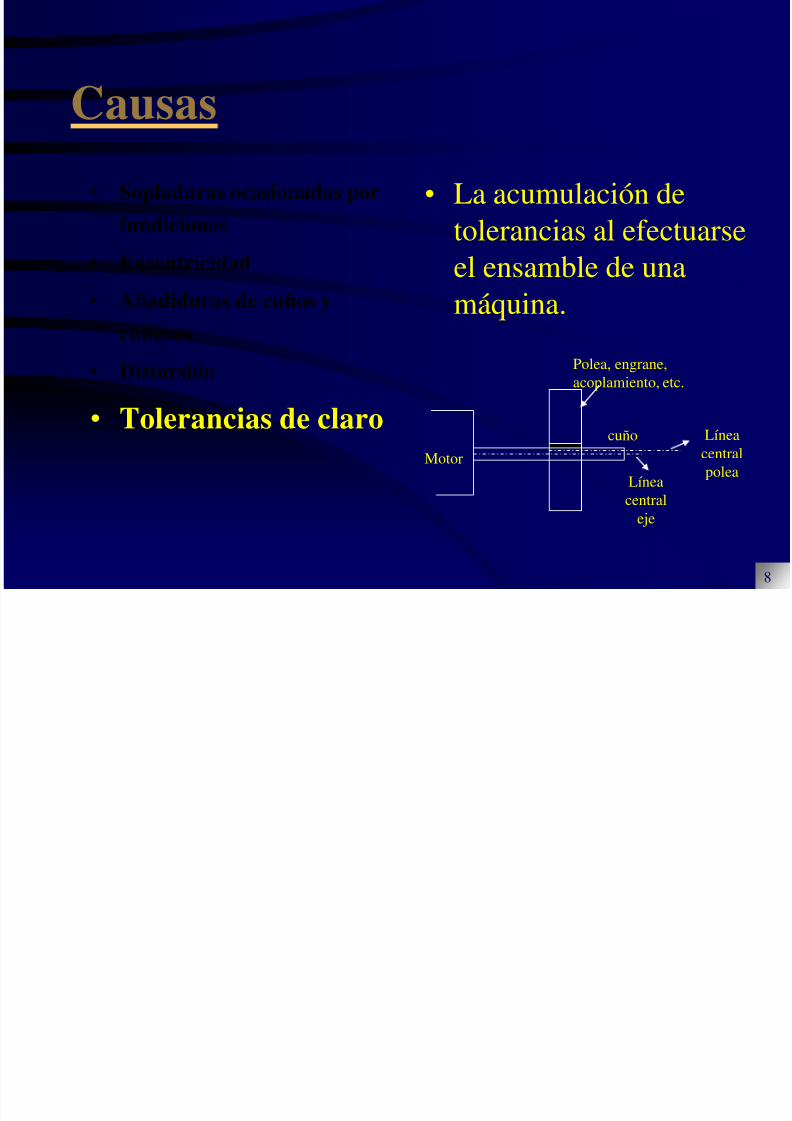
Causas
• La acumulación de
tolerancias al efectuarse
el ensamble de unamáquina.
• Sopladuras ocasionadas por
fundiciones
• Excentricidad
• Añadiduras de cuños y
cuñeros
• Distorsión
• Tolerancias de claro
Línea
central
eje
Línea
central
poleaMotor
Polea, engrane,
acoplamiento, etc.
cuño
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 9/739
Causas
• La mayoría de los rotores
debido al material que
manejan son susceptibles a la
corrosión, abrasión y
desgaste.
• Si la corrosión y el desgaste
no ocurren uniformemente, se
producirá desequilibrio..
• Sopladuras ocasionadas por
fundiciones
• Excentricidad
• Añadiduras de cuños y
cuñeros
• Distorsión
• Tolerancias de claro• Corrosión y desgaste

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 10/7310
Causas • Los rotores se pueden
desequilibrar a causa de una
acumulación desigual de
depósitos (polvo, cal, sílice,
etc.) en el rotor.
• Ocasiona problemas de
desequilibrio cuando las
partículas de sedimento se
comienzan a desprenderse.
• Por la misma vibración del rotor
origina mas desprendimiento de
partículas originando un grave
problema de desequilibrio.
• Sopladuras ocasionadas por
fundiciones
• Excentricidad
• Añadiduras de cuños y
cuñeros
• Distorsión
• Tolerancias de claro• Corrosión y desgaste
• Acumulación de
depósitos

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 11/7311
Causas • Tolerancias de claro
• Corrosión y desgaste
• Acumulación de depósitos
• Sopladuras ocasionadas por
fundiciones
• Excentricidad
• Añadiduras de cuños y
cuñeros
• Distorsión
• Las causas anteriores pueden ocurrir en un rotor
en grado mayor o menor.
• Pero; la suma vectorial de todo el desequilibrio seconsidera como una concentración en sitio
llamado el “punto pesado”.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 12/7312
Como corregir el desbalance:
• Se elimina una cantidad de peso en la
posiciòn directa.
o
– Se compensa colocando un peso equivalenteen la posiciòn directamente opuesta al punto
pesado.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 13/7313
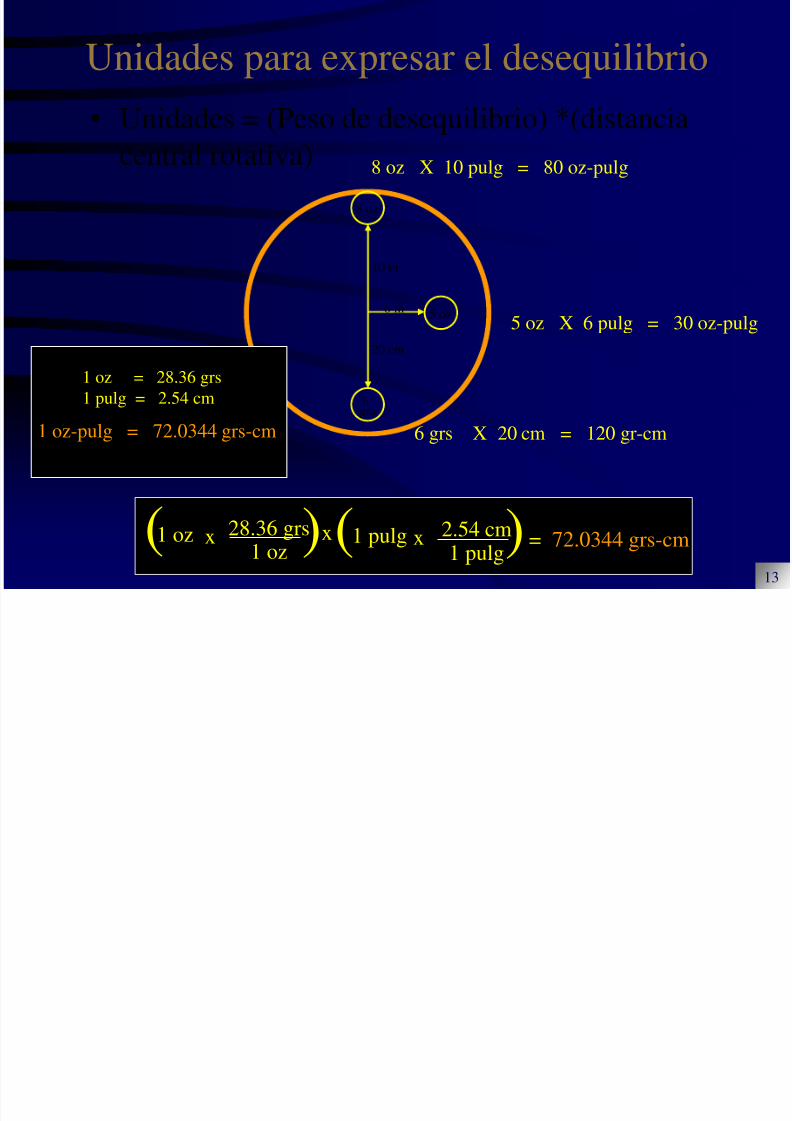
Unidades para expresar el desequilibrio
• Unidades = (Peso de desequilibrio) *(distancia
central rotativa)
8 oz
6
grs
5 oz
10 in
6 in
20 cm
8 oz X 10 pulg = 80 oz-pulg
5 oz X 6 pulg = 30 oz-pulg
6 grs X 20 cm = 120 gr-cm
1 oz 28.36 grs
1 oz
x
( )1 pulg 2.54 cm
1 pulgx
( )x = 72.0344 grs-cm
1 oz = 28.36 grs
1 pulg = 2.54 cm
1 oz-pulg = 72.0344 grs-cm
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 14/7314
Importancia del equilibrio
• Las fuerzas ocasionadas por el desequilibrio son
dañinas para la duración de una maquina -- el
rotor, los cojinetes y la estructura de soporte.
• La cantidad de fuerza producida por el
desequilibrio depende de la velocidad de rotación
y del grado de desequilibrio.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 15/7315
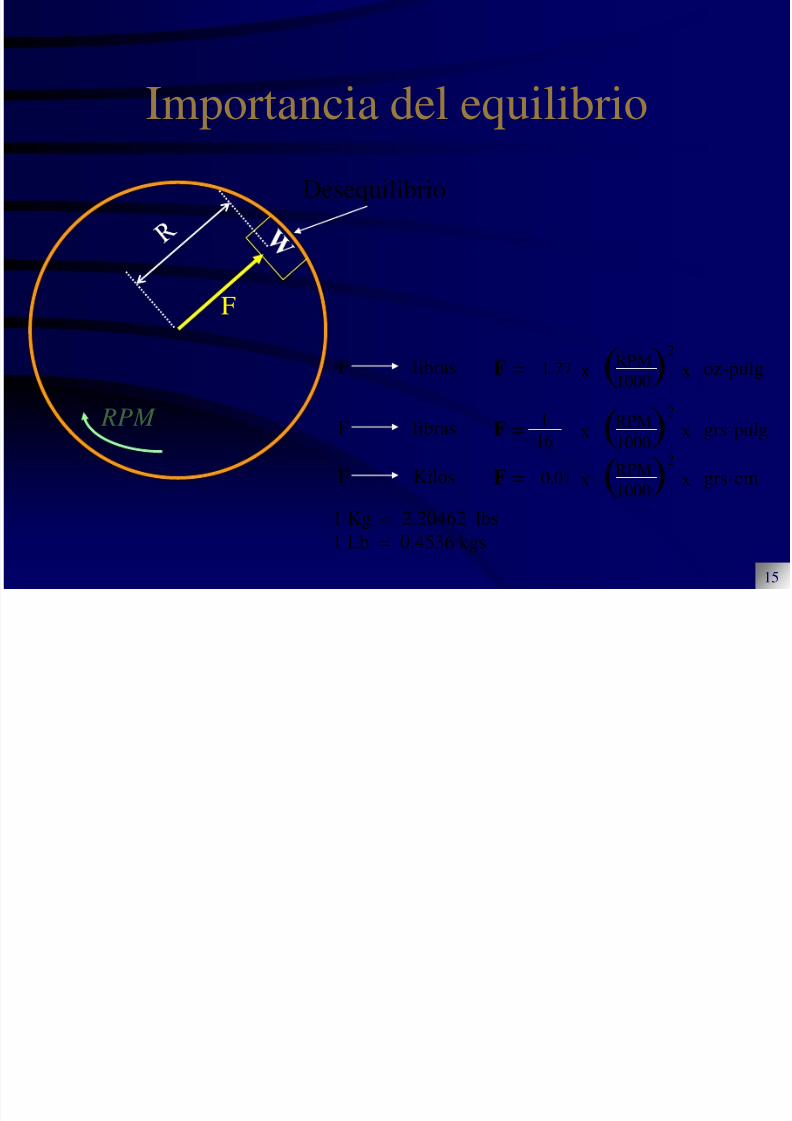
Importancia del equilibrio
Desequilibrio
RPM
F
F = xRPM
1000( )2
x oz-pulg1.77F libras
F = 116
xRPM1000( )
2x grs-pulgF libras
F Kilos F = xRPM
1000( )2
x grs-cm0.01
1 Kg = 2.20462 lbs
1 Lb = 0.4536 kgs

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 16/7316
F
P e s o d e
1 7. 3 g r s
F
P e s o d e
2 2. 5 g r s
R P M
R P M Plano 1
Plano 2
Radio de 14 c ms
Radio de 14 c ms
F
P e s o d e
1 7. 3 g r s
F
P e s o d e
2 2. 5 g r s
R P M
R P M Plano 1
Plano 2
Radio de 14 c ms
Radio de 14 c ms
Plano 1: 242.2 grs-cm a 22º y Plano 2: 315 grs-cm a 34º
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 17/7317

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 18/7318
Tipos de desequilibrios• El desequilibrio también puede definirse como:
La condición que existirá cuando la línea central
rotatoria y el eje central principal no sean
idénticos.
• Existen cuatro tipos de desequilibrio:
• ESTATICO• PAR
• CUASI-ESTATICO
• DINAMICO
7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 19/7319
Tipos de desequilibrios
• Cada tipo de desequilibrio se define por la
relación que guardan entre si el eje principal
y la línea central rotatoria de la maquina.
• Según el tipo de desequilibrio que presente
un rotor, se hará necesario realizar el
equilibrado en uno, dos o más planos de
corrección.
7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 20/7320
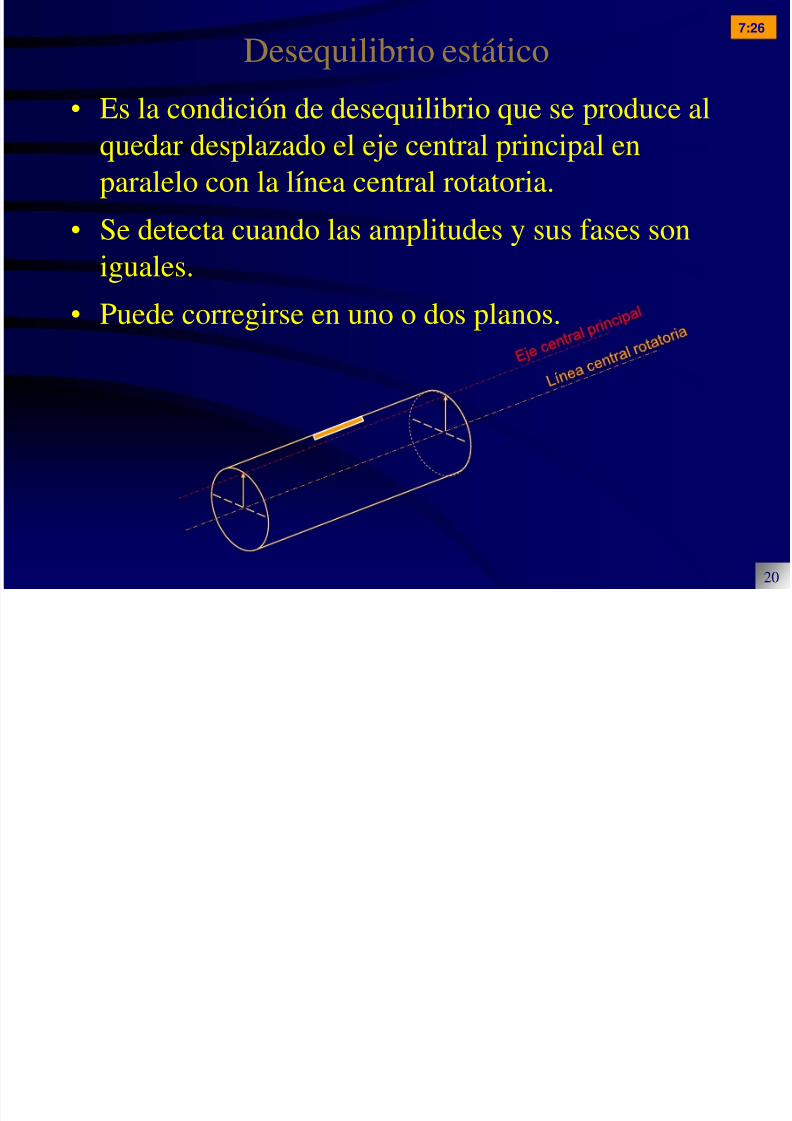
Desequilibrio estático
• Es la condición de desequilibrio que se produce al
quedar desplazado el eje central principal enparalelo con la línea central rotatoria.
• Se detecta cuando las amplitudes y sus fases son
iguales.• Puede corregirse en uno o dos planos.
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 21/7321
Desequilibrio por par de fuerzas• Es la condición que existe cuando cruce el eje central principal la línea
central rotatoria en el centro de gravedad del rotor.
• Esto es; hay un lugar pesado en cada extremo del rotor, pero
hallàndose en lados opuestos de la línea central.
• Se detecta cuando las amplitudes sean iguales pero sus fases difieran
180º.
• Puede corregirse en dos planos necesariamente.
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 22/7322
Desequilibrio cuasi-estático• Es la condición en la que el eje central principal cruza la línea central
rotacional, pero no en el centro de gravedad del rotor.
• Se puede considerar como una combinación del desequilibrio estático y por
par de fuerzas en que el desequilibrio estático se halle directamente alineado
con uno de los momentos de par.
• Se detecta: las fases variarán unos 180ª , pero la amplitud de vibración será
más elevada en un extremo del rotor que en otro.
• Puede corregirse a lo menos en dos planos.
7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 23/7323
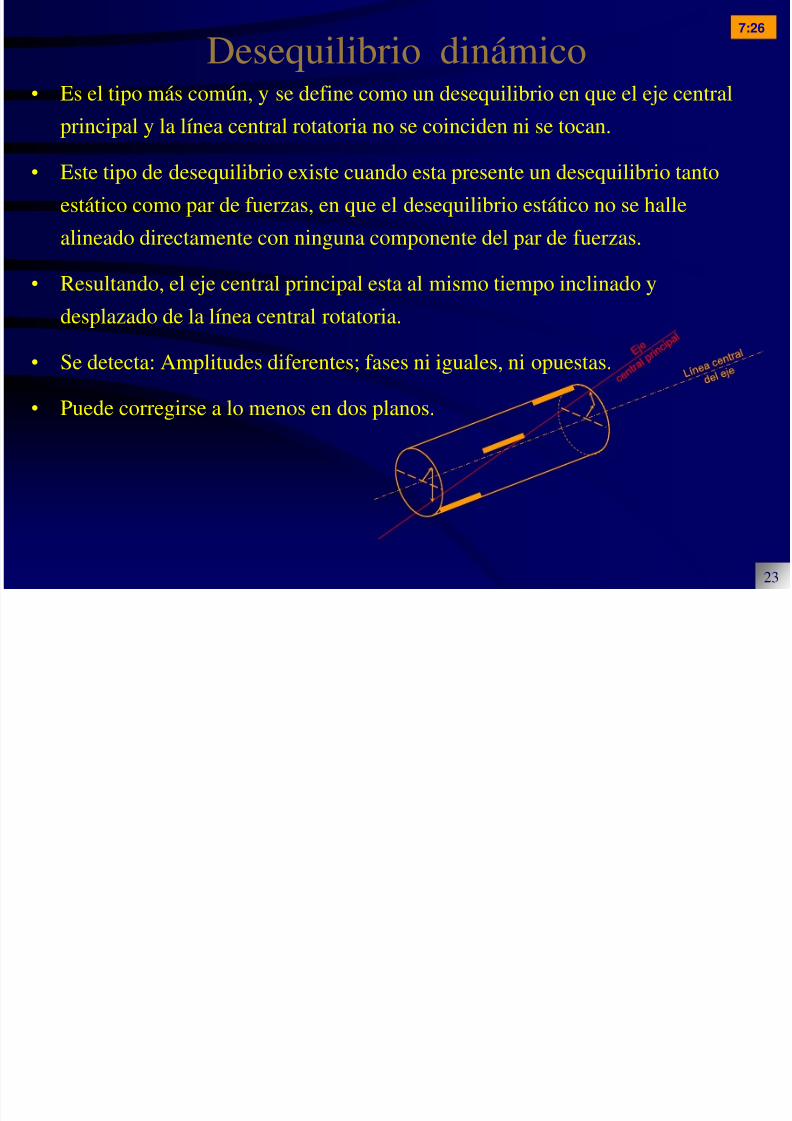
Desequilibrio dinámico• Es el tipo más común, y se define como un desequilibrio en que el eje central
principal y la línea central rotatoria no se coinciden ni se tocan.
• Este tipo de desequilibrio existe cuando esta presente un desequilibrio tanto
estático como par de fuerzas, en que el desequilibrio estático no se halle
alineado directamente con ninguna componente del par de fuerzas.
• Resultando, el eje central principal esta al mismo tiempo inclinado y
desplazado de la línea central rotatoria.
• Se detecta: Amplitudes diferentes; fases ni iguales, ni opuestas.
• Puede corregirse a lo menos en dos planos.
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 24/7324
CARACTERISTICAS DE LOS ROTORES DESEQUILIBRADOS
• El desequilibrio siempre es indicado por una vibración alta a 1 x RPM de laparte desequilibrada (pero la vibración a 1 x RPM no siempre es un
desequilibrio). En general, esta cresta de 1 x RPM dominará el espectro.
• La amplitud a 1 x RPM normalmente será mayor que o igual a 80 % de la
amplitud total siempre que el problema sea sólo de desequilibrio (puede serde sólo 50 a 80% si además del desequilibrio existen otros problemas).
• Cuando el desequilibrio predomina sobre otros problemas, en general habrá
una diferencia de fase de unos 90° entre las direcciones vertical y horizontal
de un cojinete ( + 30°). En consecuencia, si hay vibración alta a 1 x RPM,
pero tal diferencia de fase es de 0° o cercana a 180°, normalmente indica otra
causa del problema, como excentricidad.
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 25/7325
CARACTERISTICAS DE LOS ROTORES DESEQUILIBRADOS
• Tal vez un indicador de desequilibrio aún mayor que el cambio de fase de
aproximadamente 90° entre la horizontal y la vertical es el hecho de que cuando
existe un desequilibrio considerable, la diferencia de fase horizontal entre los
cojinetes interior y exterior deberá aproximarse a la diferencia de fase en la dirección
vertical. Esto es, lugar de comparar la fase horizontal y vertical sobre el mismo
cojinete, deberá compararse la diferencia de fase horizontal externa e interna con la
diferencia de fase vertical externa e interna.
75º
Apoyo interno
78º
Apoyo externo
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 26/7326
CARACTERISTICAS DE LOS ROTORES DESEQUILIBRADOS
• Cuando el desequilibrio es dominante, la vibración radial (horizontal y vertical)
normalmente será mucho más alta que la que hay en la dirección axial (excepto para
los rotores colgados).
• La resonancia a veces puede aumentar los efectos del desequilibrio.
• El desequilibrio puede contribuir enormemente a la vibración de aflojamiento alta.
De hecho, en un rotor con desequilibrio y aflojamiento, en caso de que se pueda
equilibrar el rotor, esto puede reducir sustancialmente la vibración de aflojamiento,
aunque a menudo regresará cuando se presenta de nuevo incluso el más mínimo
componente de desequilibrio. A veces ni siquiera es posible equilibrar rotores que
presentan un aflojamiento notorio.
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 27/73
27
MOTOR CON DESEQUILIBRIO DE FUERZA DOMINANTE
4 3
2 1
DIRECCIONAPOYO
1
APOYO
2
APOYO
3
APOYO
4
AXIAL 60° *70° 60° *80°
HORIZONTAL 30° 25° 30° 40°
VERTICAL 120° 110° 120° 135°
* VALORES DE FASES CORREGIDAS
7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 28/73
28
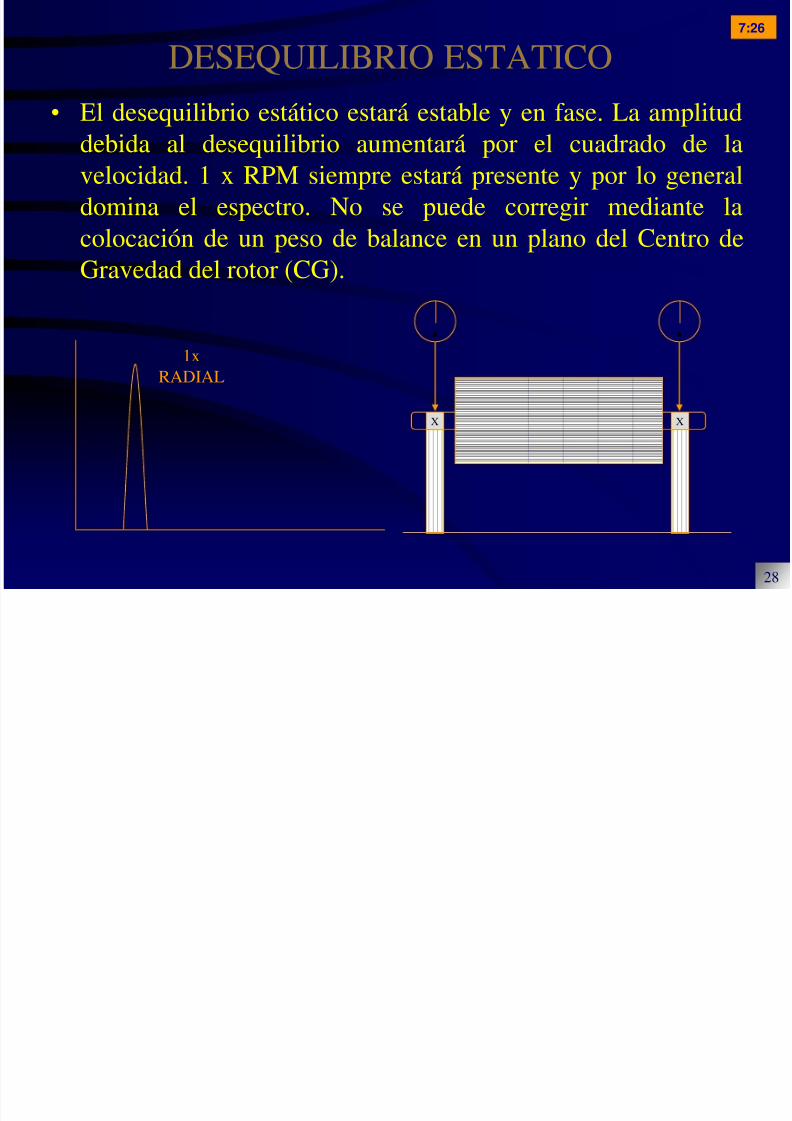
DESEQUILIBRIO ESTATICO
• El desequilibrio estático estará estable y en fase. La amplitud
debida al desequilibrio aumentará por el cuadrado de lavelocidad. 1 x RPM siempre estará presente y por lo general
domina el espectro. No se puede corregir mediante la
colocación de un peso de balance en un plano del Centro de
Gravedad del rotor (CG).
1x
RADIAL
. .
X X
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 29/73
29
MOTOR CON DESEQUILIBRIO DE ACOPLAMIENTO DOMINANTE
4 3
2 1
* VALORES DE FASES CORREGIDAS
DIRECCIONAPOYO
1
APOYO
2
APOYO
3
APOYO
4
AXIAL 60° *70° 60° *80°
HORIZONTAL 30° 210° 200° 180°
VERTICAL 120° 295° 280° 300°
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 30/73
30
DESEQUILIBRIO DE PAR DE FUERZAS
• El desequilibrio de acoplamiento tiende hacia los 180°
fuera de fase en el mismo eje. 1x siempre estará presente ydomina por lo general el espectro. La amplitud varia con el
cuadrado de la velocidad en incremento. Puede ocasionar
tanto vibraciones axiales como radiales. Para corregir es
necesario colocar pesos de balance en dos planos por lomenos. Adviértase que debe haber una diferencia de fase
de unos 180° entre las horizontales y las verticales.
1xRADIAL
. .
X X
7:26
MOTOR CON DESEQUILIBRIO DINAMICO DOMINANTE

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 31/73
31
MOTOR CON DESEQUILIBRIO DINAMICO DOMINANTE
4 3
2 1
* VALORES DE FASES CORREGIDAS
DIRECCIONAPOYO
1
APOYO
2
APOYO
3
APOYO
4
AXIAL 60° *70° 60° *80°
HORIZONTAL 30° 90° 80° 70°
VERTICAL 120° 180° 170° 165°
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 32/73
32
RESUMEN: El desequilibrio de fuerza (o de estática), se manifiesta mediante fases casi
idénticas en dirección radial sobre cada cojinete del rotor de máquina.
. El desequilibrio de acoplamiento (o de par de fuerzas), presenta una relación
fuera de fase de unos 180° cuando se comparan, en una misma máquina, las
fases de dirección horizontal externa e interna, o las fases de dirección vertical
externa e interna.
El desequilibrio dinámico, se indica cuando la diferencia de fase está muy distante
de 0° ó 180°, pero significativamente, es casi idéntica en las direcciones
horizontal y vertical. Esto es la diferencia de fase horizontal podría ser casi
cualquier cosa entre los cojinetes exterior e interior; pero el punto clave es que
la diferencia de fase vertical debería entonces ser casi idéntica a la diferencia
de fase vertical ( +- 30°). Por ejemplo, si la diferencia de fase horizontal entre
los cojinetes internos y externos es de 60° y el problema dominante es eldesequilibrio dinámico, la diferencia de fase vertical entre estos dos cojinetes
debe ser de unos 60| ( +- 30°). Si la diferencia de fase horizontal varía mucho
de la diferencia de fase vertical, esto indica claramente que el problema
dominante no es el desequilibrio.
7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 33/73
33
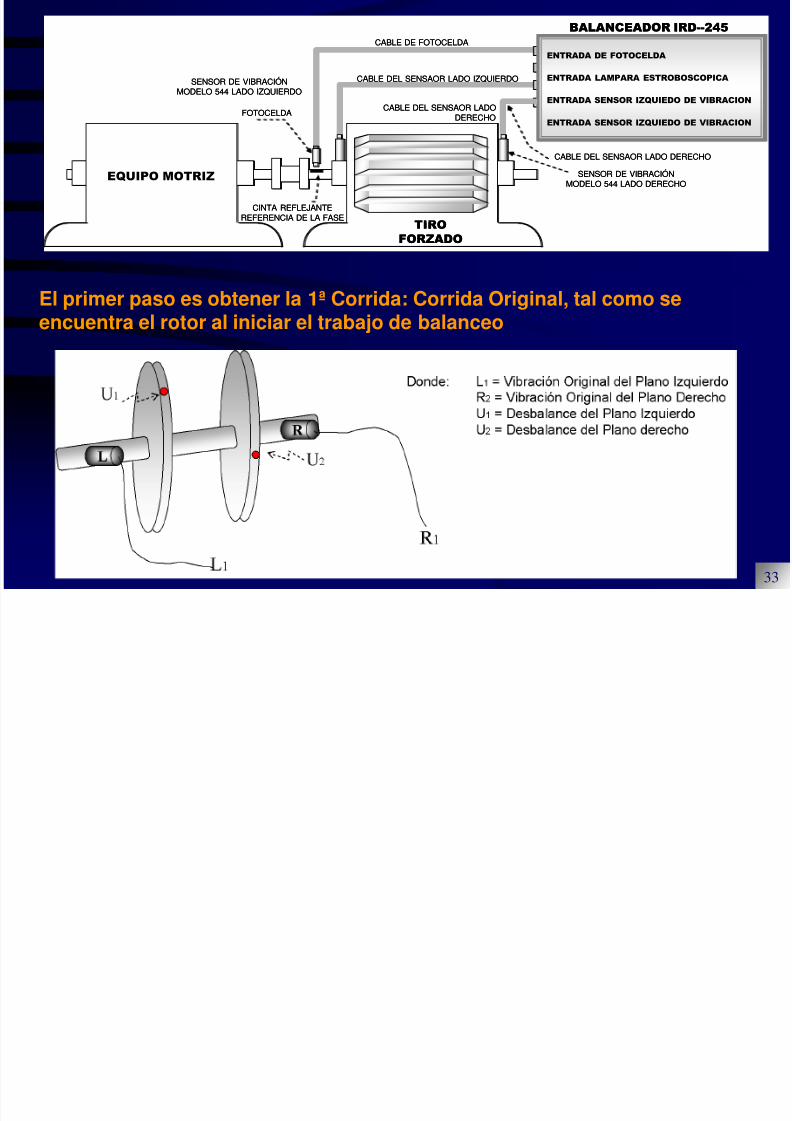
ENTRADA DE FOTOCELDA
ENTRADA LAMPARA ESTROBOSCOPICA
ENTRADA SENSOR IZQUIEDO DE VIBRACION
ENTRADA SENSOR IZQUIEDO DE VIBRACION
CABLE DE FOTOCELDA
TIRO
FORZADO
EQUIPO MOTRIZ
CABLE DEL SENSAOR LADO IZQUIERDO
CABLE DEL SENSAOR LADODERECHO
BALANCEADOR IRD--245
FOTOCELDA
SENSOR DE VIBRACIÓNMODELO 544 LADO IZQUIERDO
SENSOR DE VIBRACIÓNMODELO 544 LADO DERECHO
CINTA REFLEJANTEREFERENCIA DE LA FASE
CABLE DEL SENSAOR LADO DERECHO
ENTRADA DE FOTOCELDA
ENTRADA LAMPARA ESTROBOSCOPICA
ENTRADA SENSOR IZQUIEDO DE VIBRACION
ENTRADA SENSOR IZQUIEDO DE VIBRACION
CABLE DE FOTOCELDA
TIRO
FORZADO
EQUIPO MOTRIZ
CABLE DEL SENSAOR LADO IZQUIERDO
CABLE DEL SENSAOR LADODERECHO
BALANCEADOR IRD--245
FOTOCELDA
SENSOR DE VIBRACIÓNMODELO 544 LADO IZQUIERDO
SENSOR DE VIBRACIÓNMODELO 544 LADO DERECHO
CINTA REFLEJANTEREFERENCIA DE LA FASE
CABLE DEL SENSAOR LADO DERECHO
El primer paso es obtener la 1ª Corrida: Corrida Original, tal como seencuentra el rotor al iniciar el trabajo de balanceo
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 34/73
34
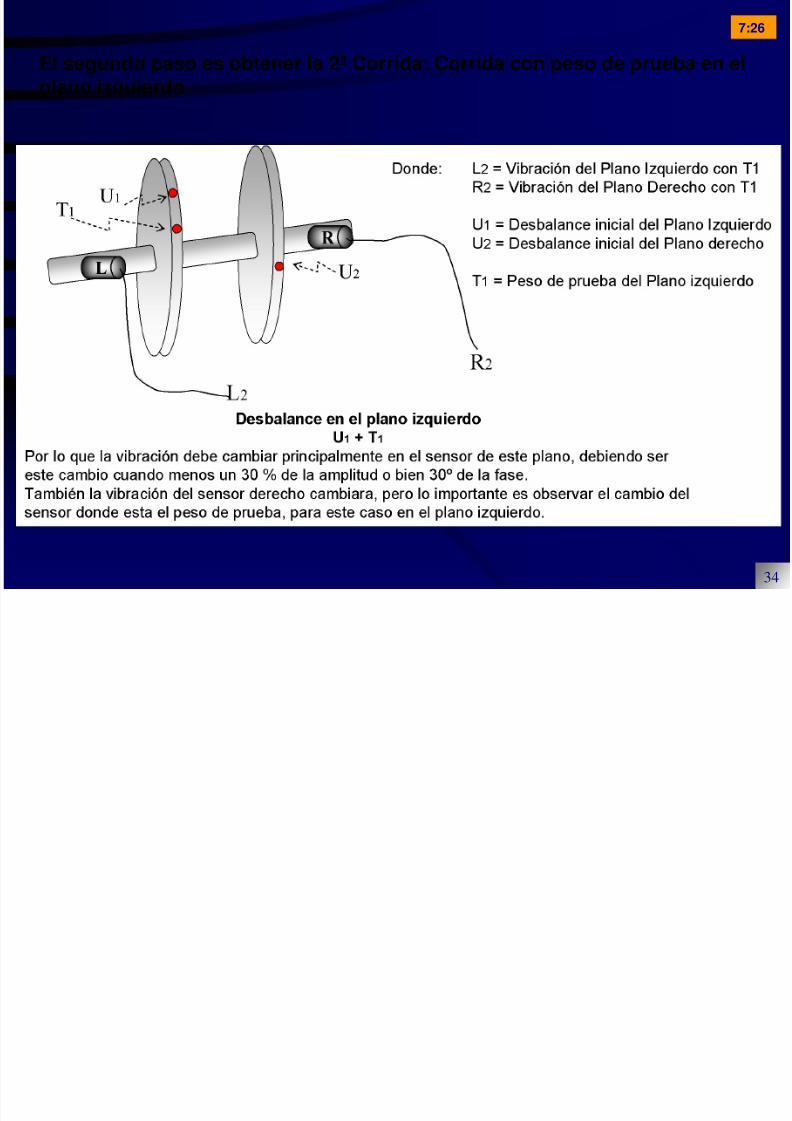
El segundo paso es obtener la 2ª Corrida: Corrida con peso de prueba en elplano izquierdo
7:26
7 26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 35/73
35
El segundo paso es obtener la 3ª Corrida: Corrida con peso de prueba en elplano derecho
7:26
7 26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 36/73
36
Colocar las correcciones dadas por el instrumento IRD-245 para cadaplano.Agregando la cantidad y posición correspondiente para cada plano,por ejemplo:
LT COR = 2.01 x TW 204º RT COR = 2.73 x TW 265º . Corrección plano Izquierdo Corrección plano Derecho
.
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 37/73
37
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 38/73
38
U1
U2
Donde: L1 = Vibración del Plano No. 1R2 = Vibración del Plano No. 2
U1 = Desbalance del Plano No. 1
U2 = Desbalance del Plano No. 2
T1 = Peso de prueba del Plano No. 1
T2 = Peso de prueba del Plano No. 2
A, B, C, D = Coeficientes de influencia
L
L1
R
R1
BALANCEO EN DOS PLANOS
METODO DE COEFICIENTES DE INFLUENCIA
7:26
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 39/73
39
1a. Corrida: Lecturas originales
L1
= AU1
+ BU2 ...................
3
U1
U2
4R1 = CU1 + DU2 ...................
BALANCEO EN DOS PLANOS: METODO DE COEFICIENTES DE INFLUENCIA7:26
BALANCEO EN DOS PLANOS: METODO DE COEFICIENTES DE INFLUENCIA
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 40/73
40
2a. Corrida: Con (T1) peso de prueba
conocido en el plano No. 1
U1
U2
+ T1
L2
= A(U1
+ T1) + BU
2 ...................3
R2 = C (U1 + T1) + DU2 ................... 4
BALANCEO EN DOS PLANOS: METODO DE COEFICIENTES DE INFLUENCIA 7:26
BALANCEO EN DOS PLANOS: METODO DE COEFICIENTES DE INFLUENCIA 7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 41/73
41
U1
U2
+ T2
L3
= AU1
+ B (U2
+ T2) ……….
5
R3 = CU1 + D (U2 + T2) ………... 6
3a. Corrida: Con (T2) peso de prueba
conocido en el plano No. 2
BALANCEO EN DOS PLANOS: METODO DE COEFICIENTES DE INFLUENCIA 7:26
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 42/73
42
Por reducción encontramos los coeficientes de influencia
L2 - L1
T1
A =
L3 - L1
T2
B =
-
Ecuaciones y1 3L1 = AU1 + BU2
L2 = -AU1 - AT1 - BU2
L1 - L2 = - AT1
-L1 = AU1 + BU2
L3 = -AU1 - BU2 - BT2
L1 - L3 = - BT2
Ecuaciones y1 5
7:26
7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 43/73
43
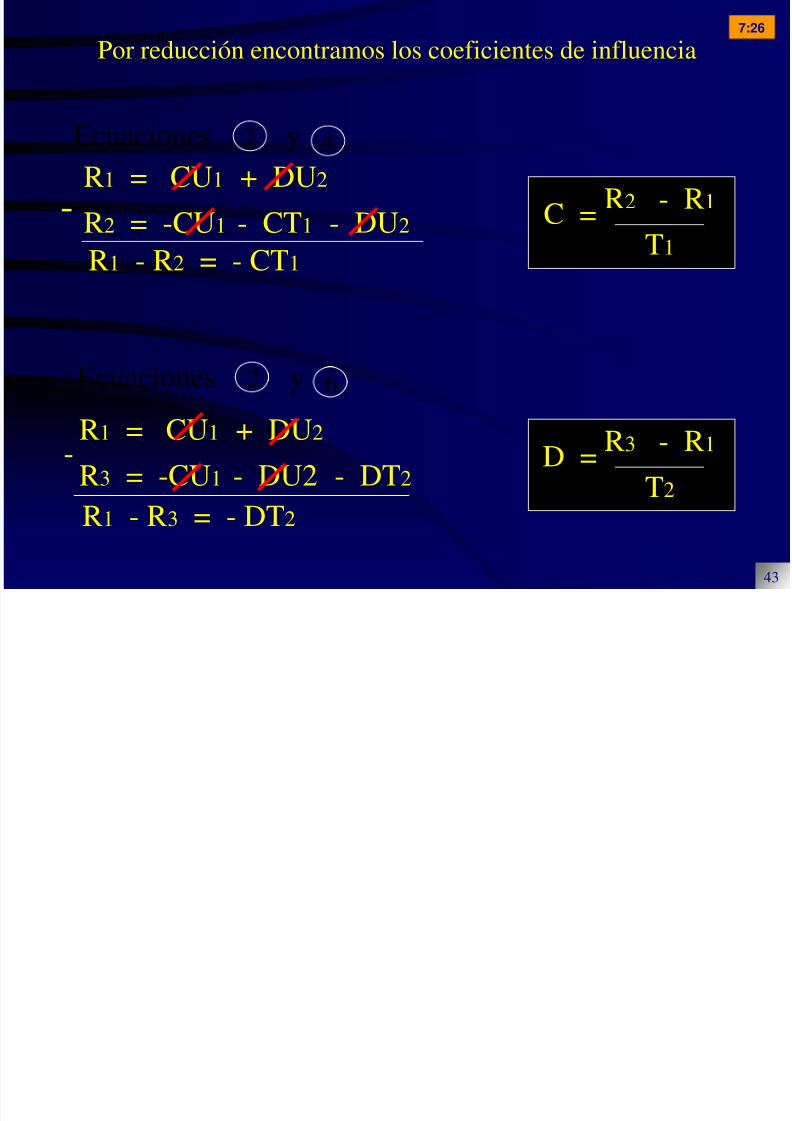
Por reducción encontramos los coeficientes de influencia
R2 - R1
T1
C =
R3 - R1
T2
D =
-
Ecuaciones y2 4R1 = CU1 + DU2
R2 = -CU1 - CT1 - DU2
R1 - R2 = - CT1
-R1 = CU1 + DU2
R3 = -CU1 - DU2 - DT2
R1 - R3 = - DT2
Ecuaciones y2 6
7:26
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 44/73
44
L1 = AU1 + BU2 & R1 = CU1 + DU2Lecturas originales:
Cálculo de las correcciones: Plano No. 1
C1 = - U1
Plano No. 2
C2 = - U2
L1 D - R1B
AD - CBU1 =
L1 B
R1 DU1 = =
A L1
C R1
R1 A - L1C
AD - CBU2 =
A L1
C R1U2= =
A L1
C R1
Cálculo de los desbalances:7:26
E ilib d d l d7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 45/73
45
Equilibrado de un rotor colgado
• Resumen de procedimientos para equilibrar rotores colgados
son configuraciones de máquina donde la rueda del ventiladorque debe equilibrarse se proyecta fuera de sus dos cojinetes de
apoyo.
• Esta configuración es muy común en máquinas como
sopladores, bombas, etc.
• Ya que los planos en los que deben colocarse los pesos
correctivos de equilibrio se encuentran proyectados fuera de
los cojinetes de apoyo, estos rotores no responderán a menudoa las técnicas estándar de equilibrio de uno y de dos planos.
7:26
E ilib d d t l d7:26
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 46/73
46
Equilibrado de un rotor colgado
• Además, como los planos de desequilibrio se encuentran
proyectados fuera de los cojinetes de apoyo, incluso un solodesequilibrio estático creará un desequilibrio de acoplamiento
proporcional a la distancia que hay entre el CG del rotor y el
plano de desequilibrio. En consecuencia, al tratar de equilibrar
rotores colgados, el analista necesita tomar en cuenta las dos
fuerzas de desequilibrio – la estática y la de acoplamiento- y
tratarlas como corresponde.
7:26
7:26

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 47/73
47
Como equilibrar rotores colgados mediante el
método clásico de acoplamiento-estática de un
solo plano.• Considerando la figura de referencia, es común que el cojinete
A sea el más sensitivo al desequilibrio estático en tanto que el
cojinete más lejano a la rueda del ventilador que se va a
equilibrar (el cojinete B) es el más sensible al desequilibrio deacoplamiento.
B A
1 2
6

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 48/73
48
Como equilibrar rotores colgados mediante el método clásico de
acoplamiento-estática de un solo plano.
• Ya que el plano 1 es el más cercano al centro de gravedad
(CG) del rotor, las correcciones de estática deberán efectuarseen este plano mientras se mide la respuesta en el cojinete A.
• Por otra parte, las mediciones en el cojinete B deben
realizarse a la hora en que se hacen las correcciones de
acoplamiento en el plano 2. Sin embargo, colocar un peso deprueba en el plano 2 anula el equilibrio estático alcanzado en
el cojinete A.Plano 1 Plano 2
A
Vibración del cojinete A
colocando corrección estática
en el plano 1
B
Vibración del cojinete B
colocando correcciones de
acoplamiento en el plano 2
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 49/73
49
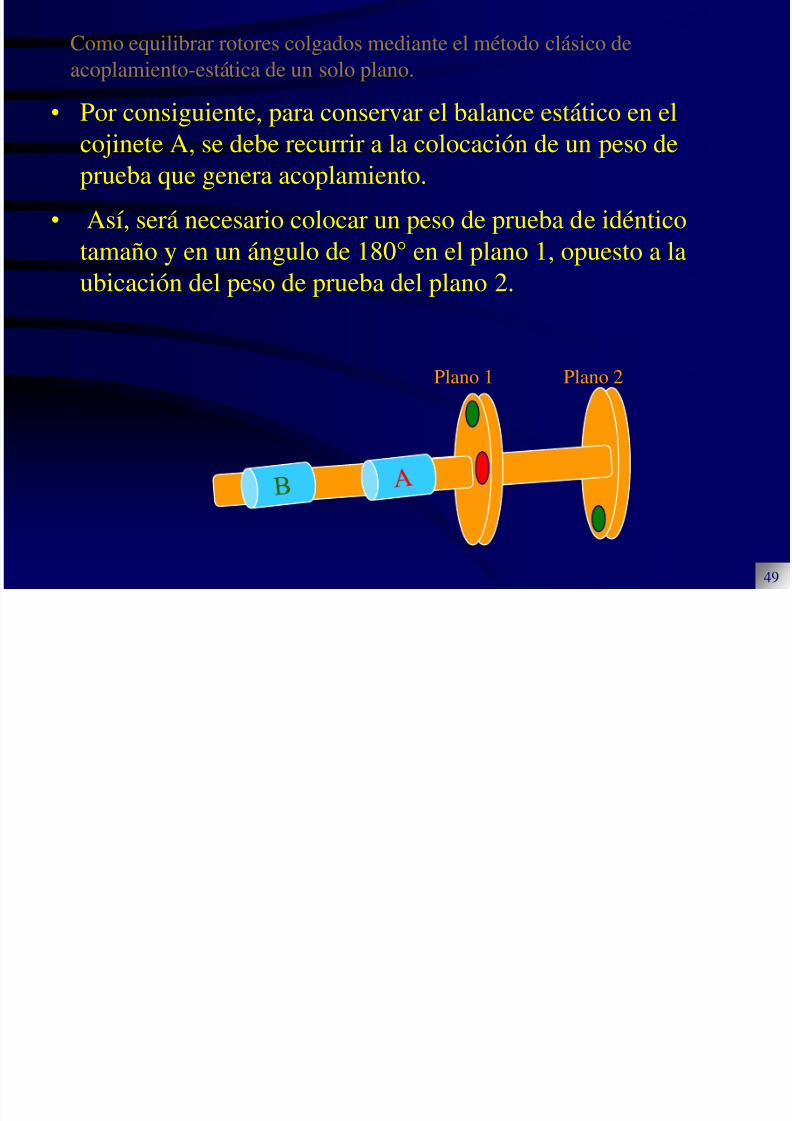
Como equilibrar rotores colgados mediante el método clásico de
acoplamiento-estática de un solo plano.
• Por consiguiente, para conservar el balance estático en el
cojinete A, se debe recurrir a la colocación de un peso deprueba que genera acoplamiento.
• Así, será necesario colocar un peso de prueba de idéntico
tamaño y en un ángulo de 180° en el plano 1, opuesto a la
ubicación del peso de prueba del plano 2.
Plano 1 Plano 2
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 50/73
50
Configuracion de instrumento de campo para
equilibrar rotores colgados• Realizar un equilibrio de un solo plano
. De acuerdo a lafigura de referencia, usar las técnicas de un solo plano para
hacer las mediciones sobre el cojinete A y colocar pesos de
prueba correctivos en el Plano 1.
• Determinar si las amplitudes de vibración resultantessatisfacen los criterios requeridos. Luego de completar el
equilibrio estático de un solo plano utilizando el plano 1,
repetir las mediciones de vibracion en los dos cojinetes,
exterior e interior, y en cada dirección(incluyendo la axial), y
asegurarse de que esta vez las amplitudes satisfagan el criterioadmisible.

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 51/73
51
Configuracion de instrumento de campo para equilibrar rotores
colgados
• Si queda un considerable desequilibrio de acoplamiento, proseguir con el equilibrio de un solo plano desde el cojinete B.
• Determinar si las amplitudes satisfacen ya todos los criterios.
• Si los criterio admisible no se pueden satisfacer para las tres
direcciones de cada cojinete, se deberá realizar el siguiente
procedimiento de equilibrio en dos planos.

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 52/73
52
Desequilibrio de rotor colgado (cantiliver)
• El desequilibrio de rotor colgado ocasiona 1x RPM altas
en dirección axial y radial. Las lecturas axiales tienden a
estar en fase, en tanto que las lecturas de fase radiales
pueden que estén inestables. Los rotores colgados (o
cantiliver) a menudo sufren tanto de un desequilibrio de
potencia como de acoplamiento, irregularidades quequieren corregirse.
x x
. .1x
AXIAL &
RADIAL

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 53/73
53
Desequilibrio de rotor colgado (cantiliver)
• El desequilibrio de rotor colgado ocasiona 1x RPM altas
en dirección axial y radial. Las lecturas axiales tienden a
estar en fase, en tanto que las lecturas de fase radiales
pueden que estén inestables. Los rotores colgados (o
cantiliver) a menudo sufren tanto de un desequilibrio de
potencia como de acoplamiento, irregularidades quequieren corregirse.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 54/73
54
RESUMEN:
. El desequilibrio de fuerza (o de estática), se manifiesta mediante fases casi idénticas
en dirección radial sobre cada cojinete del rotor de máquina.
. El desequilibrio de acoplamiento (o de par de fuerzas), presenta una relación fuera
de fase de unos 180° cuando se comparan, en una misma máquina, las fases de
dirección horizontal externa e interna, o las fases de dirección vertical externa e
interna.
El desequilibrio dinámico, se indica cuando la diferencia de fase está muy distante de
0° ó 180°, pero significativamente, es casi idéntica en las direcciones horizontal y
vertical. Esto es la diferencia de fase horizontal podría ser casi cualquier cosa
entre los cojinetes exterior e interior; pero el punto clave es que la diferencia de
fase vertical debería entonces ser casi idéntica a la diferencia de fase vertical ( +-
30°). Por ejemplo, si la diferencia de fase horizontal entre los cojinetes internos yexternos es de 60° y el problema dominante es el desequilibrio dinámico, la
diferencia de fase vertical entre estos dos cojinetes debe ser de unos 60| ( +- 30°).
Si la diferencia de fase horizontal varía mucho de la diferencia de fase vertical,
esto indica claramente que el problema dominante no es el desequilibrio.
MAQUINAS BALANCEADORAS
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 55/73
55
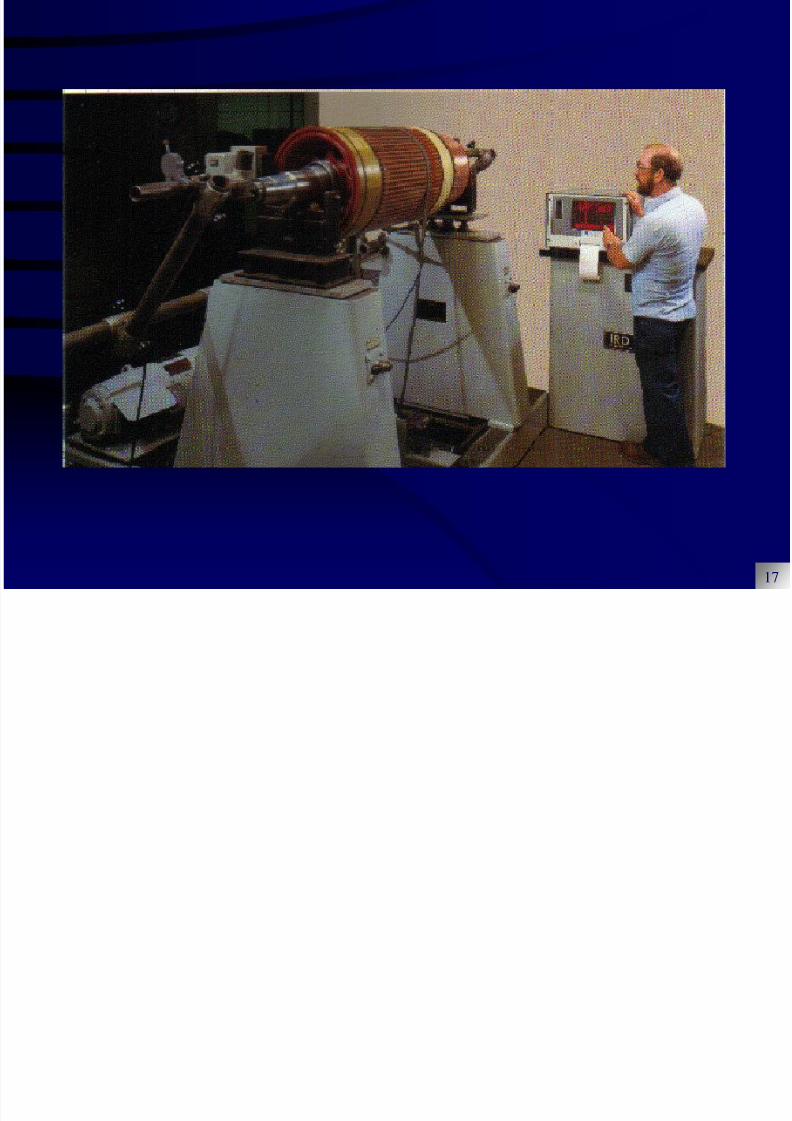
MAQUINAS BALANCEADORAS.
INTRODUCCIÓN:
• Las máquinas para balanceo dinámico resuelven
importantes problemas de balanceo de precisión de
componentes de máquinas de alta velocidad, ya que
pequeñas cantidades de desbalanceo a altas velocidades
causan vibraciones peligrosas que a menudo se traducen enfallas mecánicas.
• Se han desarrollado balanceadoras de precisión capaces de
manejar piezas rotatorias desde 1 libra a 50 toneladas de
peso. La versatilidad, simplicidad y las características deseguridad en la operación de las máquinas de balanceo, son
motivo de gran aceptación de éstas en la industria.
MAQUINAS BALANCEADORAS
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 56/73
56
MAQUINAS BALANCEADORAS.
• Refacciones compresores rotatorios
• Ejes de precisión
• Aspas de ventilador
• Flechas motrices
• Ruedas de ferrocarril
• Rodillos de fábricas de papel y máquinas de precisión
• Rotores de turbinas de vapor y gas
• Rotores diversos tales como de bombas, motores
eléctricos, etc.
Las aplicaciones incluyen el balanceo de
precisión de:
MAQUINAS BALANCEADORAS

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 57/73
57
MAQUINAS BALANCEADORAS.
• Manejar grandes cantidades de desbalanceo en forma por
demás segura.
• Determinar el valor exacto del peso correctivo.
• Localizar exactamente los planos nodales de corrección.
• Hacerse fácilmente portátil debido a que no necesita
cimentación especial.
• Entrenarse rápidamente a operadores sin experiencia paraobtener resultados inmediatos satisfactorios.
Sus características más importantes son su
flexibilidad para:
Informaciòn general de máquinas balanceadoras de apoyos flexibles
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 58/73
58
• Estos tipos de máquinas balanceadoras incorporan diseños y
características de operación bastante simples, comparadas conlas del tipo antiguo.
• Uno de los requisitos fundamentales para le balanceo dinámico
es el tipo del montaje que soporta la pieza para que ésta pueda
oscilar libremente sin tener restricciones debido a la fricción.
• El sistema de soporte ligero tiene una frecuencia natural de
oscilación baja previendo una gran cantidad de movimiento
oscilatorio, de tal manera que el sistema pueda oscilar
ampliamente en condiciones extremas de desbalanceo a unavelocidad baja antes de que las fuerzas centrífugas causadas por
el mismo hayan alcanzado un valor igual al peso del rotor.
Informaciòn general de máquinas balanceadoras de apoyos flexibles
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 59/73
59
• La fuerza del desbalanceo y el movimiento causado por ésta
estarán en la misma dirección siempre y cuando la velocidad
del rotor sea más baja que la frecuencia natural de su
montaje.
• Algunas máquinas balanceadoras de diseño más antiguotratan de usar montajes de resortes rígidos con una
frecuencia natural más alta que la velocidad de rotación, lo
cual requiere de una estructura masiva para anclar el resorte
pesado y duro; y en la mayoría de los casos, la base de lamáquina requiere de cimentación pesada para transportar las
fuerzas del desbalanceo.
Informaciòn general de máquinas balanceadoras de apoyos flexibles
Informaciòn general de máquinas balanceadoras de apoyos flexibles
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 60/73
60
• La práctica moderna de balanceo incluye un sistema de
montaje donde el rotor puede girar a una velocidad mayor quela frecuencia natural del sistema de montaje, en cuyo caso, las
fuerzas de desbalanceo y el movimiento resultante se oponen
la una a la otra.
• Esto se puede llevar a cabo únicamente en un sistema demontaje que tenga una frecuencia natural muy baja para que el
rotor pueda girar a una velocidad pequeña sin que ésta deje de
ser mayor que la frecuencia natural del sistema de montaje.
• Bajo estas condiciones se llega o sobrepasa la frecuenciacritica o de resonancia del sistema antes que el rotor haya
alcanzado una fuerza considerable debido a la velocidad.
g q p y
I f iò l d á i b l d d fl ibl

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 61/73
61
• Tal sistema permite operaciones de balanceo a cualquier
velocidad deseable arriba de la frecuencia de montaje natural
que es muy baja, en el punto donde la fuerza y el movimiento
van en direcciones opuestas.
• Este método da una indicación positiva y confiable de la
posición del desbalanceo para cualquier velocidad, sin peligro
de operar en la frecuencia crítica o de resonancia del montaje,
debido a que ésta prácticamente queda atrás una vez empiece a
girar el rotor.
• Este sistema de montaje proporciona un sistema de masa
pequeña sin fricción donde en el diseño básico la frecuencia
natural es controlada para estar normalmente debajo de 50
RPM (sistema Raydyne). Esta construcción da resultados
uniformes de balanceo a velocidades de 150 a 5000 RPM.
Informaciòn general de máquinas balanceadoras de apoyos flexibles
Informaciòn general de máquinas balanceadoras de apoyos flexibles

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 62/73
62
• Estos sistemas proporcionan un soporte sísmico para el trabajo
y donde casi esta montado libremente en el espacio, para que
aún la fuerza más pequeña haga oscilar el rotor para ladetección del desbalanceo.
• También proporciona una carrera de desbalanceo para que
grandes cantidades de éste puedan indicarse y corregirse a
velocidades más bajas y seguras; después de esto, la velocidad
puede aumentarse al nivel deseado para una corrección fina de
balanceo.
• Para el montaje de rotores, este sistema proporciona cojinetes
antifricción en los soportes de los muñones, Cuando los
rotores están equipados con sus chumaceras anti-fricción,
pueden ser balanceados en la máquina Raydyne montándolos
en los cojinetes tipo “V” de la misma.
Informaciòn general de máquinas balanceadoras de apoyos flexibles
Informaciòn general de máquinas balanceadoras de apoyos flexibles
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 63/73
63
• El sistema de montaje está sostenido independientemente por tuercas
moleteadas; por lo tanto, cada extremo puede elevarse o bajarse para
acomodar a rotores de diámetros de flechas diferentes, de tal maneraque el rotor pueda nivelarse rápidamente para poder correr libremente
entre los soportes.
• Una característica importante del sistema son los cojinetes tipo “V”
universales que se proporcionan, ya sean anti-fricción ó babbit, que
acepta un amplio rango de diámetros, eliminando por completo la
necesidad de hacer y ajustar las mitades de los cojinetes como se hacia
antiguamente.
• El sistema de transmisión es colocado en un lugar conveniente de la
pieza de trabajo mediante una banda sin-fin flexible, la cual semantiene tensa por dos poleas locas ajustables. Este sistema tiene un
motor de banda a control remoto. Este motor es de velocidad variable
para permitir operaciones en amplios rangos de velocidades.
Informaciòn general de máquinas balanceadoras de apoyos flexibles
Informaciòn general de máquinas balanceadoras de apoyos flexibles

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 64/73
64
• La máquina balanceadora está completamente equipada con
páneles de control de botones de contacto, siempre cerca de los
dedos del operador para una operación fácil, segura y rápida.
• El panel de control da al operador mando sobre todos los
motores, velocidad, tensión de la banda y los aparatos
indicadores. Todas las partes eléctricas que se emplean en el
equipo son estándar y fácilmente obtenibles.
• Estas máquinas están diseñadas para indicar estática pura,
dinámica pura o cualquier combinación de éstas, incluyendo la
selección de planos. La cuestión de balanceo y precisión es
totalmente controlado por la pieza de trabajo, la combinación delos muñones y la defección en los rotores flexibles.
g q p y
Informaciòn general de máquinas balanceadoras de apoyos flexibles

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 65/73
65
• Es igual de fácil de llevar a cabo un balanceo completo hasta
unas micro-pulgadas como lo es hacer un trabajo duro de
balanceo comercial, siempre y cuando los muñones ó cojinetesde la pieza de trabajo están correctamente terminados y que la
pieza este libre de defección.
g q p y
Requisitos que debe reunir un rotor antes de

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 66/73
66
Requisitos que debe reunir un rotor antes de
ser balanceado.
• Deberá estar perfectamente limpio.
• Verificar rectitud de la flecha, entre puntos de ser posible.
• Verificar redondez y tersura de los muñones de apoyo de
sus cojinetes.
• Buscar y eliminar holguras y partes sueltas de sus
componentes.
• Los cuñeros de la flecha, cople, impulsor, etc. Deberán
cortarse hasta el ras de la misma, debiendo tener por tanto
forma escalonada.
• Las cuñas que salgan de los cuñeros de la flecha, deberán
cortarse hasta el ras de la misma, debiendo tener por tanto
forma escalonada.
Requisitos que debe reunir un rotor antes de ser balanceado.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 67/73
67
Requisitos que debe reunir un rotor antes de ser balanceado.
• Deberán estar en buen estado los coples, disparos y
deflectores, etc. Es decir, sin golpes, sin escoraciones deesmeril, sin barrenos, sin excesivas deformaciones.
• Los componentes con alabes y radios (ventiladores,
impulsores, poleas, etc.) Deberán estar completos y en buen
estado, de acuerdo al punto anterior.• Verificar que se encuentre completo, es decir que tengan
todos sus tornillos, tuercas, chavetas, etc.
• Los opresores de los coples, ventiladores, poleas, etc., No
deberán sobresalir, ni quedar debajo de su barreno que losaloje.
* El cumplimiento de estos requisitos significa responsabilidad.
** El incumplimiento de ellos traerá retraso en el trabajo.
Requisitos que debe reunir un rotor antes de ser balanceado.

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 68/73
68
Requisitos que debe reunir un rotor antes de ser balanceado.
• Deberán estar en buen estado los coples, disparos y
deflectores, etc. Es decir, sin golpes, sin escoraciones deesmeril, sin barrenos, sin excesivas deformaciones.
• Los componentes con alabes y radios (ventiladores,
impulsores, poleas, etc.) Deberán estar completos y en buen
estado, de acuerdo al punto anterior.• Verificar que se encuentre completo, es decir que tengan
todos sus tornillos, tuercas, chavetas, etc.
• Los opresores de los coples, ventiladores, poleas, etc., No
deberán sobresalir, ni quedar debajo de su barreno que losaloje.
* El cumplimiento de estos requisitos significa responsabilidad.
** El incumplimiento de ellos traerá retraso en el trabajo.
5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 69/73
69
Pausa

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 70/73
70
ROTORES FLEXIBLES FRENTE A
ROTORES RIGIDOS
• La clasificación de un rotor como rígido o flexible depende
de la relación que existe entre la velocidad rotatoria (RPM)
y su frecuencia natural.
• Se sabe que todo objeto, incluyendo un rotor y eje de una
máquina, tiene una frecuencia natural, una frecuencia a la
que le gusta vibrar.
• Por eso si la frecuencia natural de alguna parte de una
máquina también es igual a la velocidad rotatoria u otra
frecuencia vibratoria excitadora, existe una condición de
resonancia.

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 71/73
71
ROTORES FLEXIBLES FRENTE A ROTORES RIGIDOS
• La velocidad rotacional a la que el rotor mismo entra en
resonancia se llama la “velocidad crítica”.
• Estando parada una máquina si aumentáramos la velocidad
de la misma a medida que midieramos la amplitud de
vibración, observariamos el aumento de la vibración,
seguido de una baja a un nivel más o menos constante.
• El valor de RPM al pico es donde se produce la resonancia
por lo que se llama la velocidad crítica.
A m
p l i t u d d e v i b r a c i
ó n
Velocidad rotativa
Velocidad critica
ROTORES FLEXIBLES FRENTE A ROTORES RIGIDOS

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 72/73
72
ROTORES FLEXIBLES FRENTE A ROTORES RIGIDOS
• En la práctica, cualquier trazado que se haga de la amplitud
de vibración frente a RPM podrá presentar varios picos.Los picos adicionales pueden ser producidos por la
resonancia de los cojinetes y la estructura que los apoya o,
puede que tengan el eje y el rotor más que una velocidad
crítica.
• En todo caso, al comparar los rotores rígidos con los
flexibles, nos referimos a la velocidad crítica del eje y rotor
y no a la resonancia que tenga la estructura de soporte.
• Por regla general, los rotores que funcionan a un nivel másbajo que un 70% de velocidad crítica se deformarán o
flexionará, debido a las fuerzas de desequilibrio por lo que
se llaman rotores flexibles.
ROTORES FLEXIBLES FRENTE A ROTORES RIGIDOS

5/17/2018 Diap- Balanceo - slidepdf.com
http://slidepdf.com/reader/full/diap-balanceo 73/73
ROTORES FLEXIBLES FRENTE A ROTORES RIGIDOS
• Un rotor podrà deflexionarse en varias maneras segùn su
velocidad operacional y la distribuciòn del desequilibrio atraves del rotor. La figura representa los tres modos
flexionales que pudieran afectar un rotor.