dl.madsg.comdl.madsg.com/computer/ict.docx · web viewنوسان سازی که به وسیله...
TRANSCRIPT

دانشگاه علوم و فنون هوایی شهید ستاریدانشکده ی مهندسی برق
عنوان پروژه:اصول کلی رادار
استاد پروژه:مهندس صابر شربتی
گردآورنده:ابراهیم راهپیما
1390زمستان
تقدیم به پدر و مادر عزیزم

کپی برداری بدون ذکر منبع ) پروژه دات کام ( و نام نویسنده ممنوع است
بسمه تعالی
دانشگاه علوم و فنون هوایی شهید ستاریدانشکده ی مهندسی برق- طرح و پژوهش
چکیده پایان نامه ی دوره ی کارشناسیاصول کلی رادار:عنوان پروژه
گردآورنده: ابراهیم راهپیمامهندس صابر شربتی تاریخ ارائه : استاد راهنمای پروژه
رادار سیستم الکترومغناطیسی است که برای تشخیص و تعیین موقعیت هدف بهکار می روند کلمه رادار اختصار کلمات آشکار سازی و بردیابی
رادیویی می باشد رادار یکی از مظاهر شگفت انگیز قرن بیستم است اصولاولیه آشکارسازی تقریبا قدمتی برابرقدمت بحث الکترو مغناطیسی دارد.
گرچه امروزه توسط رادارهای جدید و پیشرفته از هدف عالوه بر فاصله
استخراج می شود ولی تعیین فاصله هدف از فرستنده هنوز یکی از مهم ترین تیلور یانگ از آزمایشگاه تحقیقات1922وظایف این دستگاه است. در پاییز
( با فرستنده و گیرنده مجزاCW( با استفاده از یک موج پیوسته )NRLدریایی ) وجود یک کشتی چوبی را آشکار نمودند بدین ترتیب می توان گفت که اولین
سیستم های راداری آزمایشی به صورت موج پیوسته کار می کردند و نوع آشکار سازی آنها بستگی به تداخل ایجاد شده بین عالئم مهم سیستم دریافت
شده از فرستنده عالئم انعکاسی ازهدف متحرک با متغیر فرکانس داپلرداشت.
رادار یکی سیستم الکترومغناطیسی است که کاربردهای مختلف می تواند داشته باشد اما مهمترین مزیت رادار توانایی آن در محاسبه مسافت می
.باشد:نظریه ی استاد راهنمای پروژه
: امضای استاد راهنمای پروژه
مهر وامضای طرح و پژوهش دانشکده ی مهندسی برق:پروژه دات کام
فهرست مطالبث............................................................................................................................چکیده
1...............................................................................................فصالول: اصولرادار
2.................................................................................................................... مقدمه1-1
4...........................................................................................................- اصولرادار:1-2
8..........................................................................................- فرمولهایاسامیرادار:1-3
1-4- راههایکاهشنویز...............................................................................
..................................11
12..................................................................... (Dinamic rany- رنجدینامیکی: )1-5
13.....................................................................- تقسیمبندیرادارهاازنظرکاربرد:1-6
Fan beam..............................................................................................15- نوعبیم1-7

1-8- تفاوتراداهایاخطاراولیهباراداهایتجسسی:................................................
.........................16
1-9 -PRF برابرPRF)18.......................................................... رادارتجسسی )پالیین
18............................................................................... رادارهایسهبعدی:1-9-1
19............................................................(Track radars رادارهایتعقیبهدف: )1-9-2
19.....................................................(Fire control radars- رادارکنترآلتش: )1-9-3
20............................................................................................. باندهایفرکانسی؛1-10
21..............................................- کاربردطیففرکانسراداریدررادارهامختلف؛1-11
VHF...................................................23( mHz 300 – 30- باندفرکانسی: ) 1-12
P..............................................................24 ( GHz 8 – 4و: ) C- باندفرکانس1-13
X................................................................24 ( GHz 12 – 8- باندفرکانس: ) 1-14
25.........................................................................- امواجباطولموجمیلیمتری :1-15
25...............................................................................- فرکانسهایلیزری:1-16
31..........................................................................- محاسبهفرکانسداپلر1-17
…………..- انواعرادا1-18.…………………………………………………………………………………………………
MTI33
37......................................................................- محاسبهخروجیآشکارسازفاز:1-19
38................................................فصلدوم:نمایشاهدافمتحرکبررویاسکوپ
39.............................................(PPI- استخراجاطالعاتداپلربهوسیلهاسکوپ: )2-1
D.L Coneeler....................................................................................39- طرزکار: 2-2
40.............................................................................- خطتأخیرالکترومغناطیس:2-3
PFN......................................................................................42- مدوالتور: 2-4
44...............................................................................- خطتأخیرازنوعفیوزکوارتز2-5
45..............................................................................- خطتأخیریدیجیتالی:2-6
delay line canceller :.........................................................46- مشخصاتفیلتری2-6
Single Delay Line Canceller.....................................47- منحنیپاسخفرکانس: 2-7
47...............................................................- تحلیلسرعتکوربرایرادارهایمختلف:2-8
Double delay line canceller:...............................................49- پاسخفرکانس 2-9
Transversal filters:............................................................51- فیلترهایمتقاطع2-10
2-11 -STAGER PRF ( PRF:)52.........................................................................متغیر
Stager :...................................................................56بهصورتPRF- روشتولید2-12
58.........................................................................- فیلترهایداپلرباکمترلفاصله:2-13
61...............................................................................- شرحکارسیستم:2-14
MTI.....................................................................62- محدودیتهایعملکردرادار: 2-15
62......................................................(Improvement factor- ضریببهبودی: ) 2-16
63................................................ (Sub clutter visibility- قابلیتدیددرکالتر: ) 2-17
64...........................................................- اثرتغییراتفرکانس:2-18
65................................(Internal Clutter Fluctuation- نوساناتداخلیکالتر: ) 2-19
70...........................................................فصلسوم:نوساناتداخلیکالتردررادار
MTI.................................................71- محدودکردنگسترشطیفیکالتردررادار: 3-1
Non Coherent. ..................................................................- بلوک دیاگرام33-2
MIT Rada72
72.......................................................( :AMTI- مشکالتخاصدرطراحیرادار)3-
73............................................................................................- رادارهایپالسداپلر:3-4
76........................................................................................- سیستمهایپالسداپلر:3-5
Mediom PRF :...................................................................77- رادارهایپالسداپلر3-6
FM :..................................................................................................78- فاصلهیابی3-7
81..................................................................................- رادارهایبافشردگیپالس:3-8
Puls Lompression Advantage :................................82- مزیتهایفشردگیپالس3-9
83........................................................دستیابیبهیکپالسوسیعبااستفادهازپالسباریک:
83.........................................................................- کاربردهایپالسباریکدررادار:3-10
84.....................................................................- محدودیتهاییکرادارپالسکوتاه:3-11
85.................................................- عواملموثردرانتخابسیستمفشردگیپالس:3-12
85...........................................................................- روشفعالدرتولیدشکلموج:3-13
86..................................................................................- تکنیکهایفشردگیپالس:3-14
90...............................( :Passive Fm Linr Deviceخطی)FM- وسایلغیرفعال3-15
91.................................................................( :V.C.Oنوسانسازباکنترلولتاژ)3-15-1
100.............................................................................فصلچهارم:رادارهایردیاب
101..............................................................( :Tracling Radars- رادارهایردیاب)4-1
101......................................................................- چگونگیعملکردیکرادارردیاب:4-2
101...................................................................- کاربردهایاساسیرادارهایردیاب:4-3
102............................................- چگونگیدستیابیبهمختصاتهدفوعملپردازش :4-4
106................................................................................- اسکنالکترونیکیچیست؟4-5
106................................................................................................- اسکنوانواعآن:4-6
107................................................................................................- مدتزماناسکن:4-7
108...........................................................................( :Raster Scan- اسکنخطی)4-8
112..................................................................( :Conical Scan- اسکنمخروطی)4-9
115...................................( :mono puls tracking radar- رادارردیابتکپالس)4-10

115........................................................................- انواعرادارهایردیابتکپالس:4-11
118.....................- بلوکدیاگرامیکرادارردیابتکپالسمقایسهگردامنهییکبعدی:4-12
119.................................-تکنیکهایفیدهورن )تغذیهکنندهآنتن( رادارتکپالس:4-13
119.........................................................................................-زاویهیدیدچیست؟4-14
120............................................................-رادارهایردیابتکپالسمقایسهگرفاز:4-15
123...................................ازنوعتکپالسمقایهگرفاز:Track- بلوکدیاگرامرادار4-16
123.............................................................................- مقایسهیرادارهایردیاب:4-17
124..............................................................- ردیابیدرسطحپایین ) زاویهیکم(:4-18
125.............................................................................................- ردیابیدرفاصله:4-19
127......................................................................................- رادارهایارتفاعیاب:4-20
127..............................................................................( :3D- رادارهایسهبعدی)4-21
129..............................................................................................بیم:V- رادارهای4-22
130........................................................................................- رادارهایچندبیمی:4-23
131...............................................................................- رادارهایاسکنسهبعدی:4-24
131.........................................................................................- اسکنالکترونیکی:4-25
132............................................................................................- اسکنفرکانس :4-26
134..............................................................................فصلپنجم:اصوآلرایهفازی
135...............................................................................................- اصوآلرایهفازی:5-1
136............................................................................................- ترکیباتآرایهفازی:5-2
137..............................................................- محاسبهیخروجیآرایهچهارنقطهای:5-3
138................................................- عمالسکندرطولپالسدررادارهایآرایهفازی:5-4
139...........................................................................................................- هدایتبیم:5-5
140..............................................................- مقایسهیتغذیهگرهایموازیومتوالی:5-6
146.....................................................................- معایبومزایایرادارهاآرایهفازی:5-7

147.................................................................- فرقرادارهایاولیهوثانویهچیست؟5-8
IFF :............................................................................................148- درهایسیستم5-9
SIF :..................................................................................................150- سیستم5-10
RF :.......................................................................................................152- بخش5-11
153........................................................................(ARC- کنسوآلنالوگگیرنده: )5-12
154....................................................................................................- منبعتغذیه :5-13
154......................................................................(DMC- کنسوالصلیدیجیتال: )5-14
156.......................................................................(DSC- کنسولفرعیدیجیتال: )5-15
157.......................................................................(DRC- کنسولراهدوررادار : )5-16
157.........................................................................- سیگنالهایدرایوفرستنده :5-17
158................................................................- مشخصاتفنیقسمتآنالوگگیرنده:5-18
160..........................................................- مشخصاتسیستمبرقمورداستفاده:5-19
161................................میباشد.db 40گیرندهدرمجموعMixer- ضریبتقویت5-20
163........................................................................( :ARC- کنسوآلنالوگگیرنده)5-21
171.............................................................................( :DMC- کنسولدیجیتالی)5-22
173.......................................................................( :SCS- طبقهیتطبیقسیگنال)5-23
X Angle :.............................................................................................174- کارت5-24
JY14 :....................................................................................174- مشخصاترادار5-25
179....................................................( :ARM- تکنیکهایضدموشکهایضدرادار)5-26

فصل اولاصول رادار
1

مقدمه1-1 رادار یک سیستم الکترومغناطیسی است که کاربردهای مختلف می تواند داشته باشد اما مهم ترین مزیت رادار توانایی آن در محاسبه مسافت می باشد در این فصل با توجه به اهمیت رادار پالسی و کاربرد گسترده آن به بحث پیرامون این سیستم پرداخته می شود و شاخص های مهمی که در
معادله برد رادار وجود دارد و در رادارهای دیگر نیز به گونه ای این شاخص هااهمیت دارند مورد تجزیه و تحلیل قرار می گیرد.
رادار یکی از مظاهر شگفت انگیز قرن بیستم است اصول اولیه آشکارسازی تقریبا قدمتی برار با قدمت بحث الکترو مغناطیسی دارد فارا و ماکسول در
پی بردندن که جریان های متغیر با زمان باعث ایجاد1845-1860سال های میدان های الکترومغناطیسی متغیر با زمان در فضای آزاد می شوند همچنین میدان های متغیر با زمان جریان الکتریکی متغیر با زمان تولید می کند میدانالکترومغناطیسی به وجود آمده در فضای آزاد با سرعت نور حرکت می کند
هرتز به طور تجربی نظریه هیا ماکول را مورد مطالعه قرار1886در سال داد و نشان داد که امواج الکترومغناطیسی در برخورد اجسام منعکس و
پراکنده می شوند که این مطالعه وی منجر بوجود آمدن ایده رادار شد جالب سانتی متر66است بدانید آزمایش های هرتز در فرکانس های باال طول موج
در فرکانس های پائین ادامه یافت1930انجام شد ولی کارهای بعدی تا سال تا آن که بعدا اهمیت استفاده از فرکانس های باال روشن شد
به علت محدودیت در فناوری آن زمان در سال امواج آشکار سازی در 1922 مطرح نبود تا اینکه در سال 1922فواصل بیش از یک مایل تا سال
مارکونی ارتباط رادیویی بین قاره ها را طمرح نمود و عنوان کرد که امکان بوجود آمدن دستگاهی است که امواج را در جهات مختلف ارسال کند و پس
از برخورد پرتوها به یک جسم فلزی نظیر کشتی توسط یک گیرنده این پرتوها دریافت شود که در نتیجه می توان در هوای ابری وجود کشتی را آشکار نمود
2

اما وی در به دست آوردن بعضی از ایده هایش از جمله آشکار سازی جسم وانتشار امواج کوتاه در ورای خط دید ناموفق ماند.
( با استفاده ازNRL تیلور یانگ از آزمایشگاه تحقیقات دریایی )1922در پاییز ( با فرستنده و گیرنده مجزا وجود یک کشتی چوبی راCWیک موج پیوسته )
آشکار نمودند بدین ترتیب می توان گفت که اولین سیستم های راداری آزمایشی به صورت موج پیوسته کار می کردند و نوع آشکار سازی آنها
بستگی به تداخل ایجاد شده بین عالئم مهم سیستم دریافت شده از فرستندهعالئم انعکاسی ازهدف متحرک با متغیر فرکانس داپلر داشت
این اثر شبیه لرزش موزونی است که ممکن است در هنگام عبور هواپیما از باالی گیرنده بویژه ایستگاه های ضعیف رخ می دهد این نوع رادارها رادار
اموا پیوسته تداخل موجی نیز می نامند البته این نوع رادارها فقط برای اشکار سازی وجود هدف مفید بودند و استخراج اطالعات موقعیت هدف از
درNRL در آزمایشگاه CWآنها مقدور نبود الزم به ذکر است نمونه های رادار مگاهرتز ساخته شد.60 و 32همان سال ها در فرکانس
با توجه به محدودیت های استخراج اطالعات کافی موقعیت از رادارهای موج با رادار پالسی در1934 اولین تجربه را به سال NRLپیوسته پژوهشگران
مگا هرتز به دست آوردند و با انجام آژمایش های متعدد دریافتند6فرکانس که فرکانس های راداری باال برای این کار مطلوب می باشد و با ساخت المپ
مگاهرتزی200های پرقدرت باعث تکامل طراحی رادار پالسی در فرکانس شدند.
پیشرفت های اولیه رادار پالسی در رابطه با کاربردهای نظامی بود و در بریتانیا توسعه رادار بعد از آمریکا شروع شد اما به خاطر اینکه پیشرفت
فناوری رادار مصادف با جنگ جهانی دوم بود و برتانیا نزدیک تر به جبهه جنگ بود این کشور کوشش های فراوان و بیشتری راصرف توسعه رادار نمود
توسعه رادار1940 شروع شد وتا اوایل 1935توجه برتانیا به رادار از سال در بریتانیا و آمریکا مستقال انجام می شد. عالوه بر این دو رادار در آلمان،
3
سال بعد30فرانسه، روسیه و ایتالیا و ژاپن نیز به طور مستقل در حالل مورد تحقیق و توسعه قرار گرفت لیکن حدود توسعه و کاربردهای نظامی آنها
متفاوت بود.
- اصول رادار:1-2 تعریف: رادار سیستمی است که بر اساس خاصیت امواج
الکترومغناطیس عمل می نماید و با ارسال امواج و دریافت سیگنال منعکسشده از هدف ، مشخصات و مختصات هدف را ارائه می دهد.
یک رادار ساده از چه قسمت هایی تشکیل شده است )بلوک دیاگرام یکرادار ساده(:
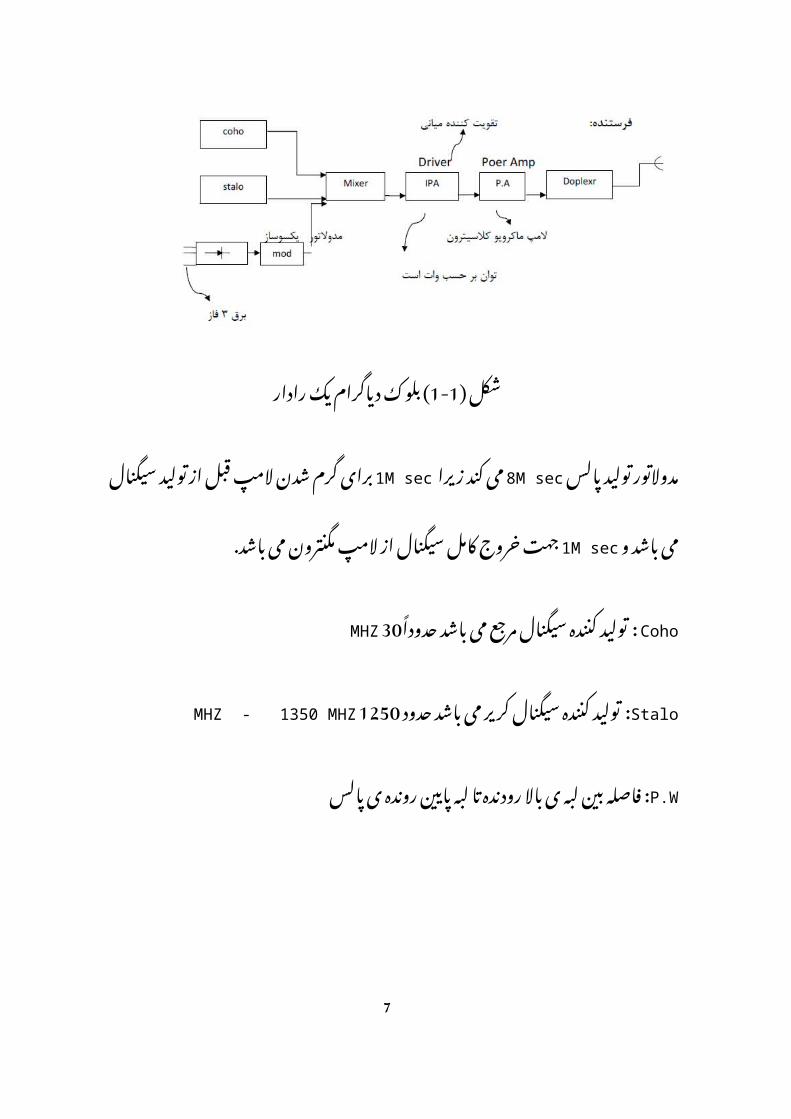
( بلوک دیاگرام یک رادار1-1شکل )4
برای گرم شدن المپ قبل از1Μ sec می کند زیرا 8Μ secمدوالتور تولید پالس جهت خروج کامل سیگنال از المپ مگنترون1Μ secتولید سیگنال می باشد و
می باشد.
Coho MHZ 30 : تولید کننده سیگنال مرجع می باشد حدودا
Stalo 1250: تولید کننده سیگنال کریر می باشد حدود MHZ - 1350 MHZ
P.W فاصله بین لبه ی باال رودنده تا لبه پایین رونده ی پالس :
5

( بلوک دیاگرام مدوالتور تولید پالس2-1شکل )
( مدار تولید پالس3-1شکل )
6
PRTمدت زمان یک پالس از لبه باال رونده تا لبه ی باال رونده پالس بعدی :
: PFNمحاسبه ی عرض پالس تولید شده توسط مدوالتور
PW = N √LC
MHZ 100 = 1250 – 1350عرض باند:
نقاط فرکانسی هر رادار بستگی به فیلترهای موجود و به کار رفته در آندارد.
7

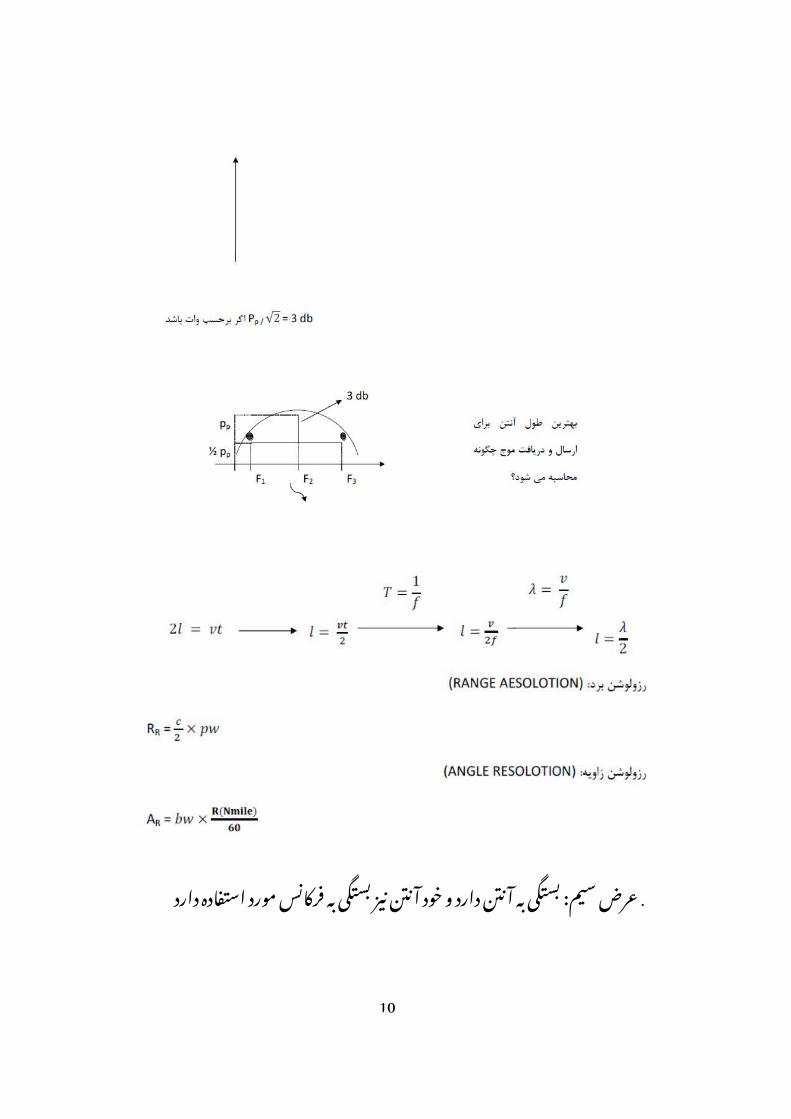
عرض سیم: بستگی به آنتن دارد و خود آنتن نیز بستگی به فرکانس.مورد استفاده دارد
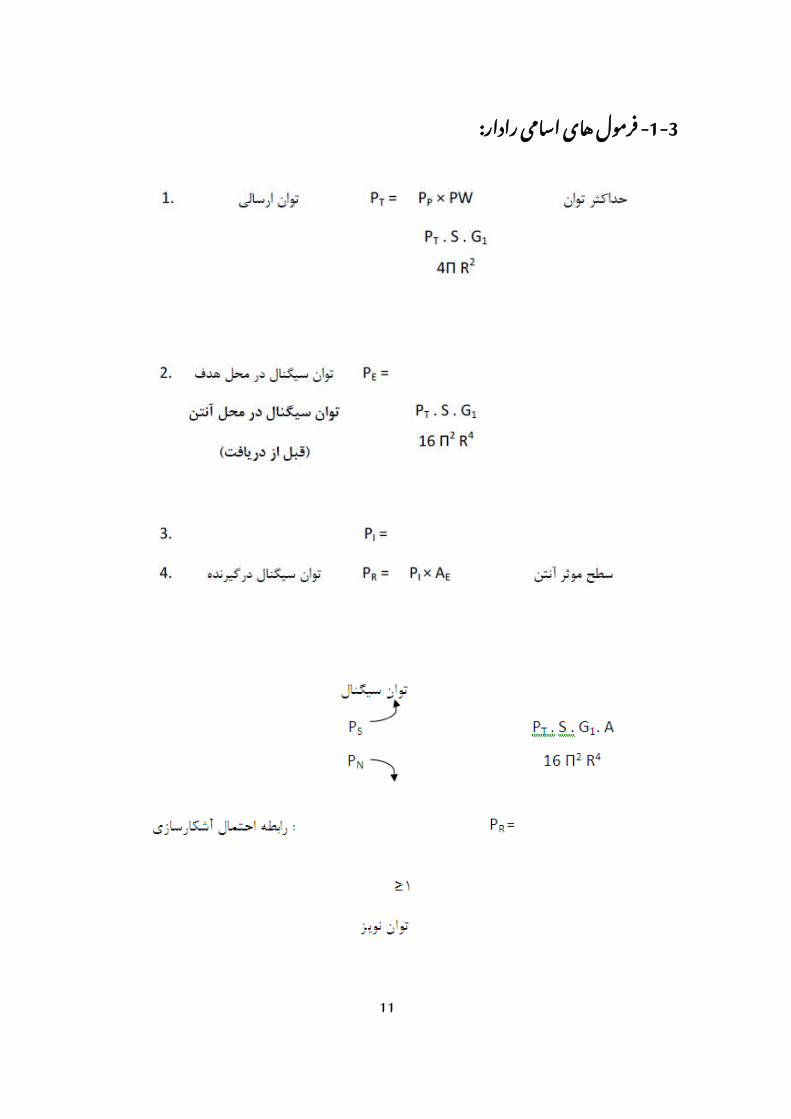
- فرمول های اسامی رادار:1-3
8

9
باشد توان دریافت رادار چقدر میDB 40 یک گیرنده – MDSسوال: اگرباشد؟
حساسیت گیرنده: ضعیف ترین سیگنالی که گیرنده می تواند دریافت و بیان میDBآشکارسازی نماید حساسیت گیرنده نامیده می شود و برحسب
نشان داده می شود.MDSشود و با
10

رنج دینامیکی فاصله ای است که رادار می تواند از نظر دریافت سیگنال ها با توان متفاوت عمل نماید یعنی ضعیف ترین سیگنالی که می تواند بگیرد و
11

آشکارسازی نماید و باالترین توان سیگنالی را که می تواند بگیرد بدون این کهاشباع شود.
- راه های کاهش نویز:1-4کم کردن عرض باند سیستم-1استفاده از المپ های ترانزیستوری جهت کم کردن حرارت-2
12
( مدار و نمودار کاهش نویز4-1شکل )
(Dinamic rany- رنج دینامیکی: )1-5
STCسیستمی است که یک پالس منفی در ابتدای گیرنده می سازد که : باعث کنترل دامنه پالس دریافتی جهت جلوگیری از اشباع سیستم می شود.
13

- تقسیم بندی رادارها از نظر کاربرد:1-6Search radarرادار تجسسی -1
Early warning radarرادار اخطار اولیه-2
Hight finder radarرادارهای ارتفاع یاب-3
Tracker radarرادارهای ردیاب-4
Fire control radarرادار کنترل آتش-5
رادار اجتناب از طوفات-6
رادارهای نجومی-7
رادارهای کنترل ترافیک-8
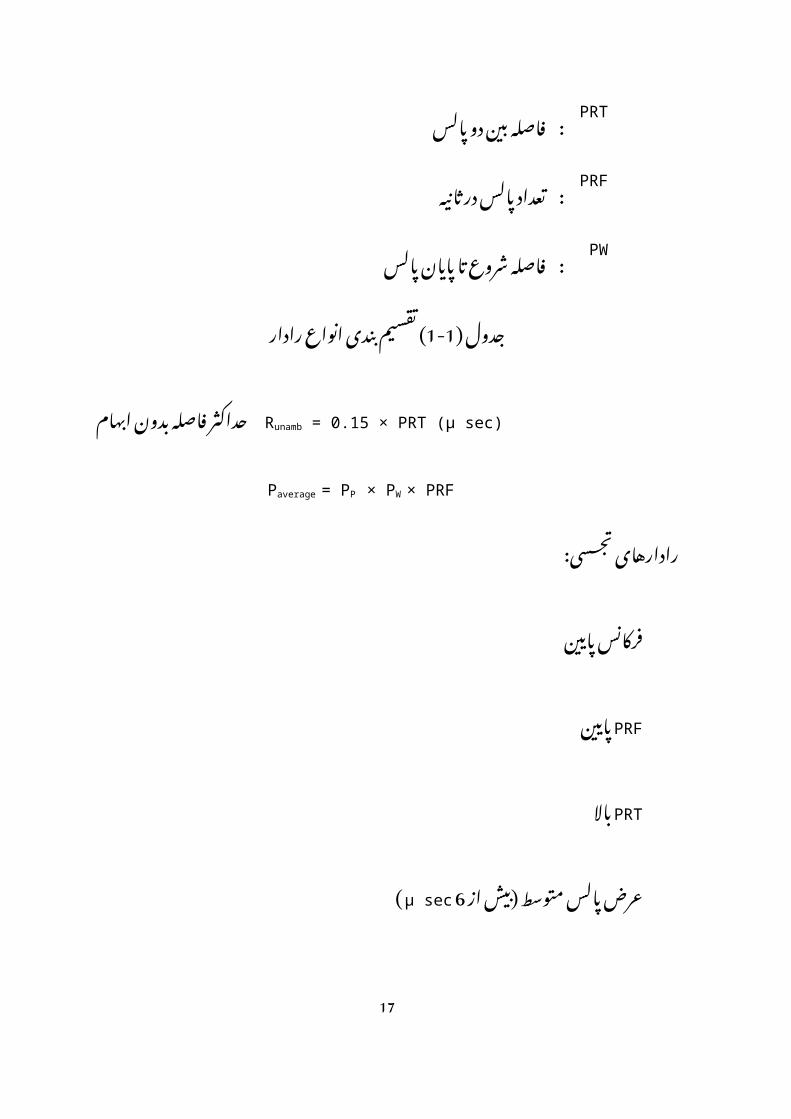
PRT:فاصله بین دو پالس
PRF:تعداد پالس در ثانیه
PW:فاصله شروع تا پایان پالس
( تقسیم بندی انواع رادار1-1جدول )
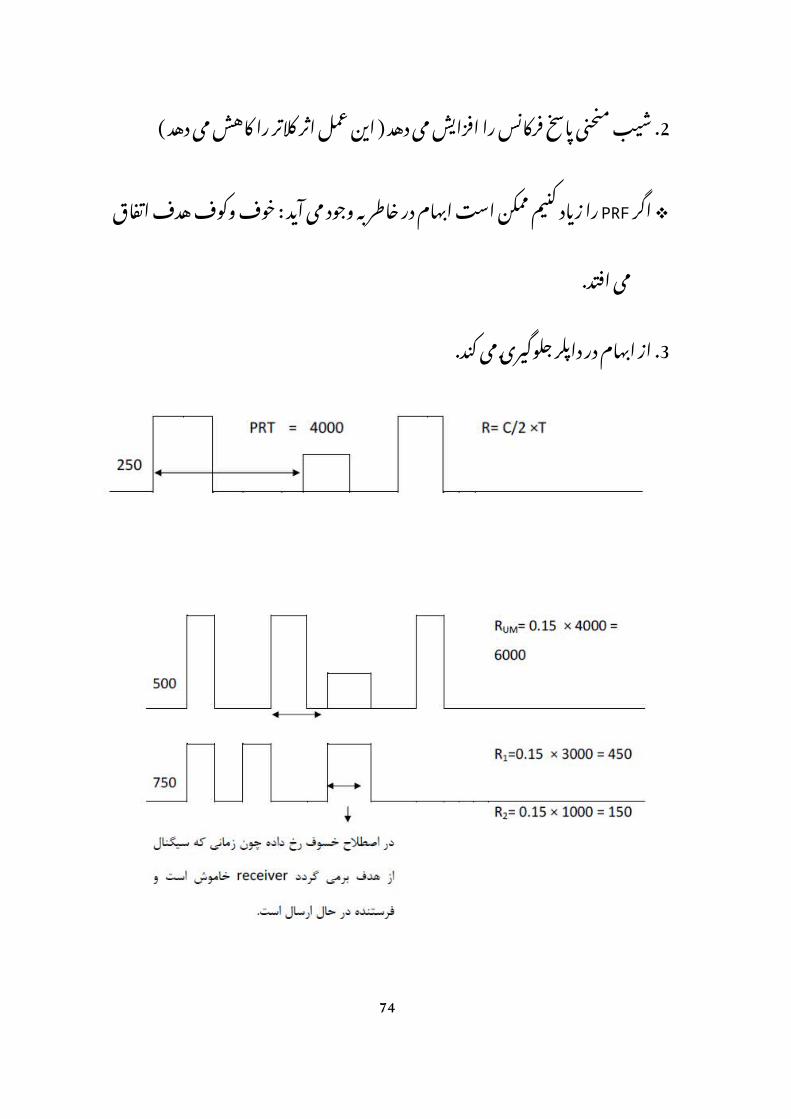
Runamb = 0.15 × PRT (µ sec) حداکثر فاصله بدون ابهام
Paverage = PP × PW × PRF
رادارهای تجسسی:
14

فرکانس پایین
PRFپایین
PRTباال
(µ sec 6عرض پالس متوسط )بیش از
Km 600 – 400برد
آنتن بزرگ
قالبیت تحرک کم
عرض بیم پهن
S و Iباند فرکانسی
رادارهای اخطار اولیه:
فرکانس پایین
15
عرض پالس زیاد
PRT باال و PRFپایین
قابلیت تفکیک کم
دقت اندازه گیری کم
برد زیاد
(L ) کمتر از VHFباند فرکانسی
Fan beam- نوع بیم1-7 در این نوع راداها بیم هایش در افق باریک و در ارتفاع پهن ولی در
رادارهای ارتفاع یاب در افق پهن و در ارتفاع باریک
- تفاوت راداهای اخطار اولیه با راداهای تجسسی:1-8در راداهای اخطار اولیه فرکانس پایین تر از راداهای تجسسی است.-1 عرض پالس بیشتر این نوع رادارها نسبت به رادارهای تجسسی از دیگر-2
تفاوت ها می باشد.3-PRF.رادارهای اخطار اولیه پایین تر از رادارهای تجسسی است
شکل بیم به آنتن بستگی دارد و در آنتن نیز به توزیع جریان وابسته می باشد secمثال در آنتن های پارابولیک )سهمی گون( توزیع جریان به صورت یک تابع
16
می باشد. برای به دست آوردن شکل بیم با به دست آوردن تابعcosecیا توزیع جریان در سطح آنتن به دست می آید.
محاسبه عرض باند یک سیستم: فرکانس دوم را منهای فرکانس اول میکنیم
visibilityقابلیت دید در کالتر( توانایی کشف و آشکارسازی سیگنال اهداف (: که بر حسبMTIمتحرک آمیخته شده با سیگنال اهداف ثابت در یک سیستم
db.بیان می شود
17

برای افزایش احتمال آشکارسازی اهداف کوچک می توانیم:کنترل دور آنتن.1PRFافزایش .2
افزایش حساسیت گیرنده.3 باشد در آنPRFسرعت کور: اگر فرکانس داپلر هدف برابر مضربی صحیح از
سرعت خاص سرعت کور می گویند.
دارار ارتفاع یاب:
18

1-9 -PRF برابر PRF)رادار تجسسی )پالیین
رادارهای سه بعدی:1-9-1 فضا را به چند بیم تقسیم می کنند و هرچه تعداد بیم ها بیشتر باشد دقت
رادار بیشتر است.
(Track radars رادارهای تعقیب هدف: )1-9-2 باند فرکانسیX و باالتر نوع بیمpencil beam
دقت اندازه گیری مختصات هدف باالست این نوع رادارها به طور مداوم موقعیت نسبی هدف را در فاصله ، زاویه و ارتفاع مشخص می نماید. آنتن این نوع رادارها دارای بیم بادیک بوده و بر
19

روی پایه متحرک قرار دارند و توسط موتوری در جهت افقی یا عمودی برایدنبال کردن هدف به کار می رود.
تغییر جهت هدف توسط تغییر زاویه یا فاز سیگنال برگشتی مشخص و باعثتغییر آنتن برای تمرکز بر روی هدف می شود.
کاربردهای این رادار کنترل اسلحه و تنظیم کردن مسیر موشک می باشد.
(Fire control radars- رادار کنترل آتش: )1-9-3 عملکرد این نوع راداها و مشخصانشان مانند رادار تعقیب هدف است. این
رادارها نیز با تصحیح زاویه آنتن باعث می شودند تا آنتن بر روی هدف بماند وسالح را به طرف هدف روانه می نماید.
.در این نوع رادارها پردازش سیگنال بسیار سریع صورت می گیرد )محاسبه فرکانس داپلر و دقت اندازه گیری داپلر و مشخص کردن
محدوده های داپلر(در آنتن های آرایه فازی از فریت ها استفاده می شود که در آن ها زاویه
تابش بیم را با کم و زیاد کردن جریان تغییر می دهند.
رادار کنترل ترافیک: باید دقت و رزولوشن آن ها باال باشد.
20

باندهای فرکانسی؛1-10
220رادارهای متداول در باند فرکانسیmHz 35 تاGHz.کار می کنند ( رادارهای ماوراء افقoTh در باند فرکانسی ) مگاهرتز کار می5 تا 4
کند.
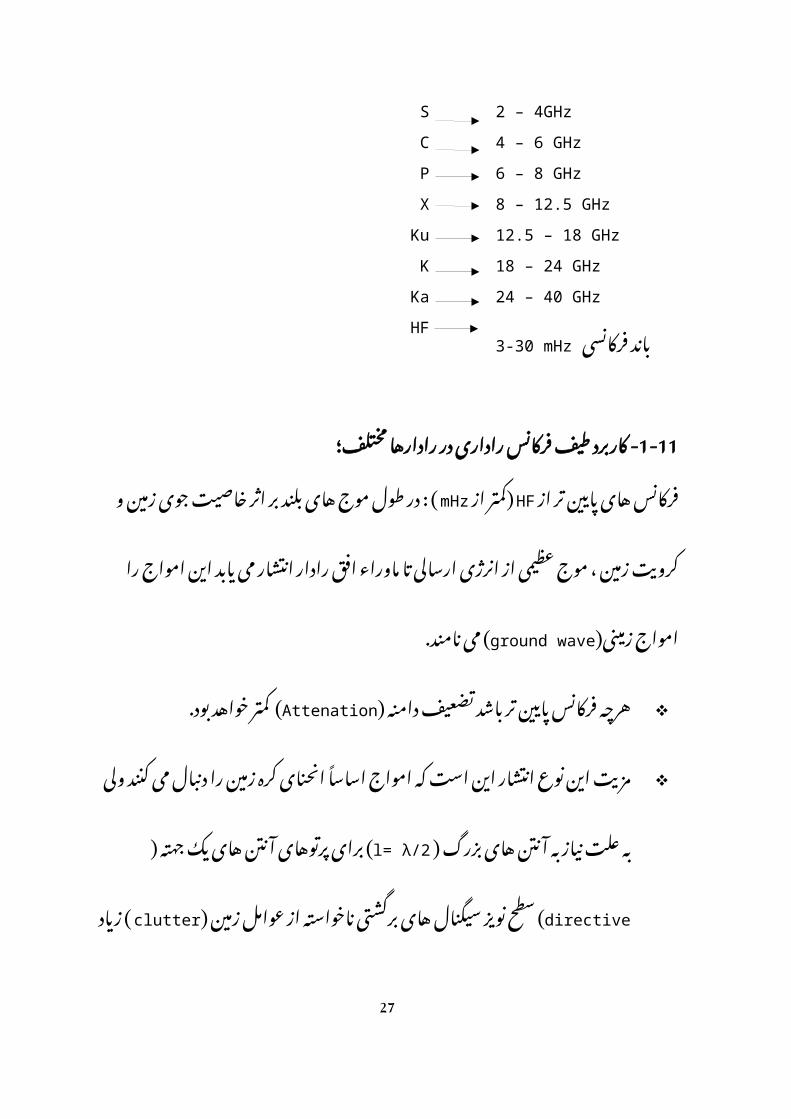
1 – 2 GHzL
2 – 4GHzS
4 – 6 GHzC
6 – 8 GHzP
8 – 12.5 GHzX
12.5 – 18 GHzKu
18 – 24 GHzK
24 – 40 GHzKa
3-30 mHz باند فرکانسی HF
- کاربرد طیف فرکانس راداری در رادارها مختلف؛1-11 ( : در طول موج های بلند بر اثرmHz )کمتر از HFفرکانس های پایین تر از
خاصیت جوی زمین و کرویت زمین ، موج عظیمی از انرژی ارسالی تا ماوراء( می نامند.ground waveافق رادار انتشار می یابد این امواج را امواج زمینی)
( هرچه فرکانس پایین تر باشد تضعیف دامنهAttenationکمتر خواهد ) بود.
21

مزیت این نوع انتشار این است که امواج اساسا انحنای کره زمین را ( برایl= λ/2دنبال می کنند ولی به علت نیاز به آنتن های بزرگ )
( سطح نویز سیگنال های برگشتیdirectiveپرتوهای آنتن های یک جهته ) ( زیاد است طیف الکترومغناطیسیclutterناخواسته از عوامل زمین ) این باند فرکانسی برای کاربردهایHFشلوغ در فرکانس های زیر
عمومی رادار مناسب نیستند. مسیر به هدف می رسد یکی2انرژی تابش یافته از آنتن رادار از
مسیر مستقیم از رادار به هدف و دیگری مسیر بازتاب یافته از سطح مسیر به گیرنده می رسد.2زمین و اکوی برگشتی نیز از
در محل رادار سیگنال برگشتی از مسیر مستقیم با سیگنال انعکاسی از 2مسیر انعکاسی دارای اختالف فاز خواهند بود باین اختالف فاز شامل
قسمت است یکی در اثر اختالف فاصله و دیگری در اثر خاصیت انعکاسیسطح زمین.
22
23
مسیر مختلف در محل رادار:2 سیگنال برگشتی از 2بنابراین مجموع
VHF( mHz 300 – 30- باند فرکانسی : ) 1-12این باند فرکانسی از اقتصادی ترین و مهم ترین بخش طیف
الکترومغناطیس است که در جهت ساخت و عملیاتی کردن رادارهای بخصوصی با برد و قدرت بسیار زیاد و آنتن های بزرگ در مراقبت
ماهواره ای به کار گرفته می شود. رادارهای در باند فرکانسیVHF(از سیگنال های برگشتی جوی Weather
echo.با تضعیف دامنه تقریبا مصون می باشند )VHF( 300MHz- 1GHzباند فرکانس : )
این باند فرکانس برای رادارهای مراقبت هوایی با برد زیاد مناسب بوده و آن را از تأثیرات عوامل جوی مصون می دارد.
محدودیت:
تخصیص طیف گسترده ای از این باند به تلوزیون هایVHFاز محدودیت های آن به حساب می آید.
L( GHz 2- 1باند فرکانس : )
24

این باند فرکانس از مزایای فرکانس های پایین مورد استفاده در رادارهای پرقدرت با آنتن های بزرگ برخوردار نیست ولی باعث تفکیک زاویه ای خوب
(angulsr resolotion.گردیده و نویزهای خارجی کمتر روی آن اثر دارد )S ( GHz 4 – 2باند فرکانس : )
اکثر رادارهایی که در این باند فرکانس کار می کنند برای مراقبت های هوایی استفاده می گردند در حالی که فرکانس های باالتر برای جمع
آوری اطالعات از هدف مانند موقعیت یابی و ردگیری دقیق به کار میروند.
مزیت:
تفکیک زاویه ای خوب توسط یک آنتن با ابعاد مناسب از مزایای باند می باشد.Sفرکانس
این باند فرکانس برای کشف هدف های با فاصله متوسط و ردگیری هدف ، زمانی که رادار باید هردو عمل را انجام دهد مناسب می باشد.
P ( GHz 8 – 4 و : ) C- باند فرکانس 1-13این باند فرکانس به طور موقعیت آمیزی در کاربردهای مراقبت هوایی
با برد متوسط جایی که اطالعات دقیق مورد نیاز است مورد استفاده بعضی از رادارهای کنترل–قرار می گیرد./ رادار ناوبری کشتی ها
اسلحه با برد زیاد.
X ( GHz 12 – 8- باند فرکانس : ) 1-14این باند فرکانس یک باند شناخته شده برای راداهای کنترل اسلحه می
S 200باشد./ رادار کنترل اسلحه
رادارهای هواشناسی روی هواپیما و رادارهای ناوبری با داپلر در این باند فرکانس کار می کنند.
25

دارای مزیت تفکیک زاویه ای با کمترین تداخل را در سطحKبه طور کلی باند مطلوب دارا می باشد.
محدودیت:
در این باند دسترسی به قدرت زیاد امکان پذیر نبوده و آنتن ها در اندازه کوچک می باشد.
- امواج با طول موج میلیمتری :1-15این بخش از طیف فرکانس رادار دارای عرض باند وسیع و پرتو یا
( توسط آنتن های کوچک می باشد.Narrow beam weidthعرض کم )افزایش فرکانس باعث افزایش ناگهانی سطح نویز و جذب اتمسفری
و کالترهای جوی می گردد و همین امر کاربرد امواج میلیمتری رامحدود می سازد.
- فرکانس های لیزری:1-16 تفکیک زاویه ای و تفکیک فاصله ای خوب با فرکانس های لیزری امکان پذیر بوده و این باند فرکانس دارای کاربردهای جمع آوری اطالعات از هدف مانند
فاصله یابی و یا تصویر هدف مناسب می باشد.
توانمندی جنگ الکترونیک رادار:
سیگنال های برگشتی رادار را دریافت و در صورت داشتنJATSأ.اختالف ، فرکانس فرستنده را تغییر می دهد.
26
cpacs( coded puls anti clutter system) ب.
پالس ها را کد می کند و می فرستد.16 µ sec
0.5 µ sec
تفکیک در زاویه را بسیار باال می برد.2رزولوشن را بسیار باال می برد.3 ( )چون از تکنیک پالس کامپرشن استفادهLPIاحتمال رهگیری رادار ).4
شده است( را کاهش می دهد. زمانی که ازpals compretionاستفاده می کنیم توان کاهش می
یابد به عبارتی به توان باال نیاز نداریم.کالتر را می شکند.5چف را نیز می شکند و هدف را از میان چف نمایان می کند.6
متغیر (PRF ) : stager PRFت.از ایجاد سرعت کور جلوگیری می کند.1ابهام در داپلر را نیز کاهش می دهد.2
) گیرنده های لگاریتمی (Log reciversث. )پرش فرکانس(Frequeny bopingج. ام:m/nپردازش ح. پالس ورودی را با هم مقایسه می کند اگر شباهت آن ها با هم12 تا 10هر
تا ( آن ها را کالتر یا هدف ثابت می پندارد و حذف7زیاد بود ) مثال بیشتر از می کند و اگر شباهت آن ها کم بود آن ها را هدف می پندارد و به اپراتور
نشان می دهد.
سطح مقطع راداری هدف:خ. ( نشان داده می شود عبارتS( یا )δسطح مقطع راداری هدف که با حرف )
است از سطح فرضی که سیگنال ارسالی از رادار را دریافت و بخشی از آن
27

(Isotropicslyرا به عنوان سیگنال برگشتی )اکو( از تمام جهات به طور یکسان )منعکس می نماید.
توضیح این که سطح مقطع راداری هدف نسبت به فرکانس یا طول موج منطقه برای آن در نظر گرفته می شود:3ثابت نبوده و به طور کلی
– Roykinابعاد هدف نسبت به طول موج کوچکتر باشد ، این حالت را )(1
Reginalمی نامند ) Resonanceابعاد هدف حدودا برابر طول موج باشد. این حالت را )(2
Reginal.می نامند ) – Opticalابعاد هدف چندین برابر طول موج باشد. این حالت را )(3
Reginal.می نامند ) که یکrبرای بررسی این حالت ها یک سطح هادی کروی مناسب با شعاع
خواهد داشت این سطح در فرکانس هایی که محیط2(πrسطح فیزیکی برابر ) (resonance elemanکره برابر طول موج باشد کره به صورت عنصر تشدید )
برابر بزرگتر از سطح مقطع حقیقی3عمل نموده و سطح مقطع راداری آن آن ظاهر می گردد.
2πr = λ
در حابتی که محیط کره ده برابر طول موج و یا بیشتر باشد سطح مقطع (optical reigonراداری برابر سطح مقطع حقیقی ظاهر خواهد شد. )
در فرکانس های زیر تشدید ، طول موج اگر بزرگتر از محیط کره باشد کره به صورت جسم بسیار کوچکی ظاهر می گردد.
در صورتی امواج راداری می تواند توسط بدنه هدف جذب شود که قطر فلز برابر طول موج باشد.
فلز مزیت امواج را بسیار خوب جذب کرده و به صورتRFبرای امواج حرارت تلف می کند و قطر مزیت به اندازه طول موج می باشد.
(Scstring principleاصول پراکندگی : ) اصول پراکندگی زمانی با اهمیت تلقی می گردد که انتخاب فرکانس برای
دیدن یک هدف الزم باشد. برای مثال / اگر کشف یک هدف در حال پرواز در باران مورد نظر باشد باید فرکانس طوری انتخاب گردد که قطرات باران نسبت به طول موج بسیار کوچک باشند. از طرفی رادارهای هواشناسی
28

دریافت سیگنال برگشتی قطرات باران اهمیت زیادی دارد و فرکانس بایدطوری انتخاب گردد که ابعاد قطرات باران در محدوده تشدید قرار گیرد.
تعریف برای سطح مقطع راداری هدف مواجه هستیم.2اصوال با ( : این تعریف با پارامترهای فنیExporenetid difinarionتجربی ) -1
گیرنده و فرستنده و ... بیان گردیده و هدف را به عنوان یک عنصر تطبیق بین دو آنتن معرفی می نماید و با محاسبه سطح مقطع
( از معادله زیر خواهیم داشتδ( یا )Sراداری )
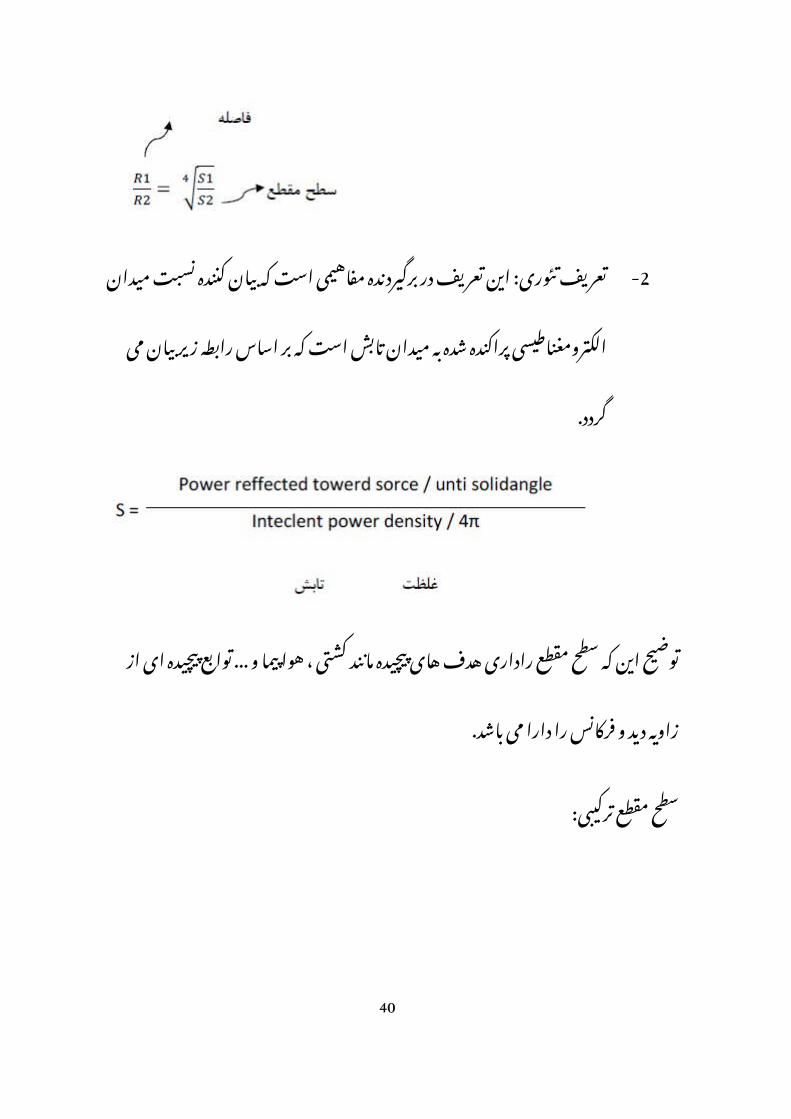
داشته باشیم خواهیم داشت: R2 و R1اگر دو هدف یکسان در فواصل
تعریف تئوری: این تعریف در برگیردنده مفاهیمی است که بیان-2 کننده نسبت میدان الکترومغناطیسی پراکنده شده به میدان تابش
است که بر اساس رابطه زیر بیان می گردد.
29

توضیح این که سطح مقطع راداری هدف های پیچیده مانند کشتی ، هواپیماو ... توابع پیچیده ای از زاویه دید و فرکانس را دارا می باشد.
سطح مقطع ترکیبی:
حجم )ایزوتروپ( همسانگرد2پراکنده سازی یک هدف نسبتا پیچیده شامل از یکدیگر قرار گرفته اند را در نظر می گیریم.L کره با فاصله 2مانند
C بین دو کره کمتر از Lدر شکل فوق فاصله .ZL< C است به عبارتی2 .Z
با2
R1این فرض که به هردو حجم همزمان پالس برخورد می کند و در نتیجه
≅R2
≅
R3سطح مقطع راداری هدف یکسان در نظر گرفته می شود و سطح مقطع ، ترکیبی نامیده می شود.
30
نسبت به رادار در حرکت باشد بردار سرعت هواپیماVاگر هدفی با سرعت یا همان بردار جهت هواپیما زاویه ای با محور انتشار امواج می سازد که آن را
نشان می دهیم.αزاویه دید رادار نامیده و با
تکنیکی است که کیفیت آشکارسازی و نمایش هدف های متحرکMTIرادار : را افزایش می دهد. که به رادار موسوم است.
اثر داپلر چیست؟ در میدان های دید و شنود اگر منبع نوسان کننده و شی ای که این نوسانات به آن برخورد می کند ، هردو یا یکی در حال حرکت باشند
تفاوتی بین فرکانس امواج دریافتی و فرکانس امواج دریافتی خواهیم داشتکه به آن اثر داپلر می گویند.
31

- محاسبه فرکانس داپلر1-17
32
فاصله هدف تا رادار باشد تعداد طول موج ها در یک رفت و برگشتRاگر
2Rموج بین رادار و هدف برابر λخواهد شد. به علت این که یک طول موج در
33

رادیان است جمع چرخش های زاویه ای که یک2πچرخش زاویه ای برابر موج الکترومغناطیسی در یک رفت و برگشت بین رادار و هدف به وجود می
4آورد πRλ.خواهد بود
دائما در حال تغییر خواهدθاگر هدف در حال حرکت باشد فاز یا همان زاویه نسبت به زمان فرکانس را خواهد داد که آن راθبود. در نتیجه تغییرات
فرکانس زاویه ی داپلر گویند.
نشان می دهند.wdسرعت زاویه ای که بر اثر داپلر به وجود آمده را با
W = 2fd = dθdt
=4 πλ×( drdt )V2
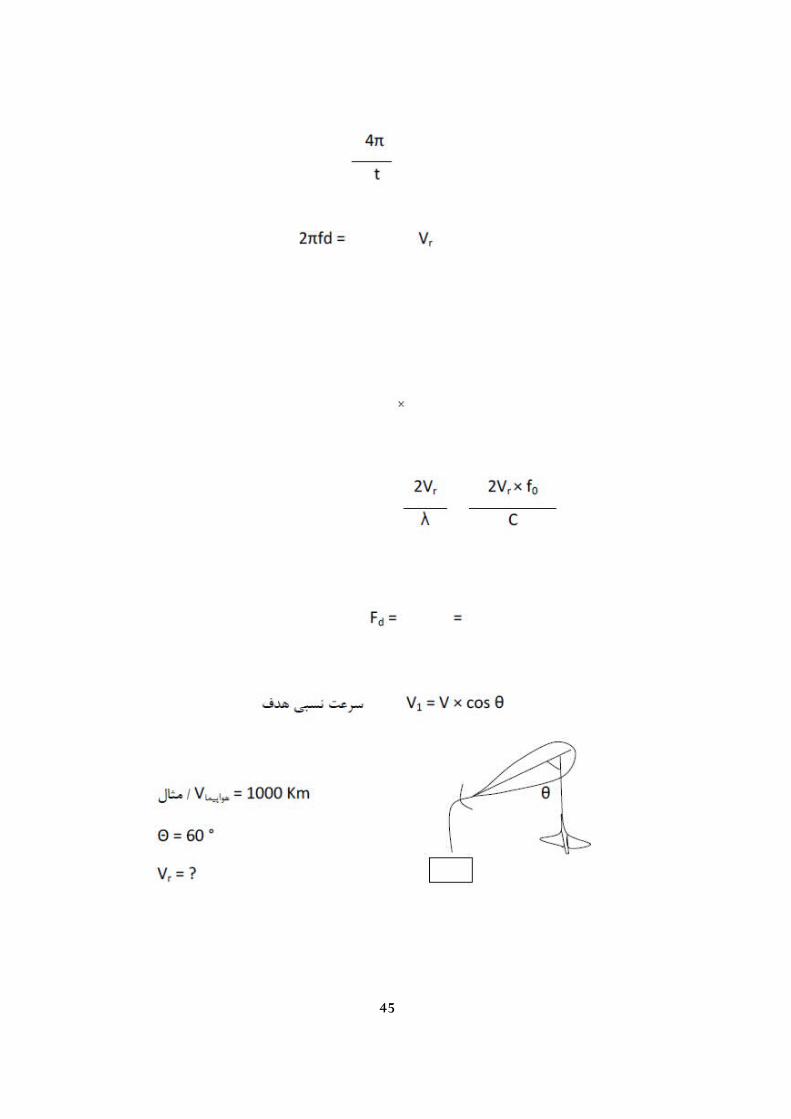
2πfd = 4 πλ × Vr
و رادار داپلر و رادار پالس داپلر از خاصیتMTIرادار داپلر جهت عملکرد خذف کالتر و نمایش هدف های
متحرک استفاده می کنند.
تعریف رادار داپلر: راداری است که برای محاسبه سرعت نسبی هدف و یا انتخاب هدف هایی با سرعت
شعاعی خاص از اثر داپلر استفاده نماید.
رادار پالس داپلر: رادار داپلری که بر اساس مدوالسیون پالس عمل می نماید رادار پالس داپلر
نامیده می شود.
چیست ؟ رادار پالسMTIفرق رادار پالس داپلر و می باشد.MTI باالتری نسبت به رادار PRFداپلر دارای
34
fd=
2Vrλ
=¿
2Vr × f0
C

MTI- انواع رادار : 1-18 : از تغییرات فاز سیگنال برای تشخیص هدف استفادهCoherent MTIأ.
می کنند. : از تغییرات دامنه سیگنال برای تشخیص هدفNon coherent MTIب.
استفاده می کند
رادارهایNon coherent MTIمعموال در هواپیماها مورد استفاده قرار می گیرد.
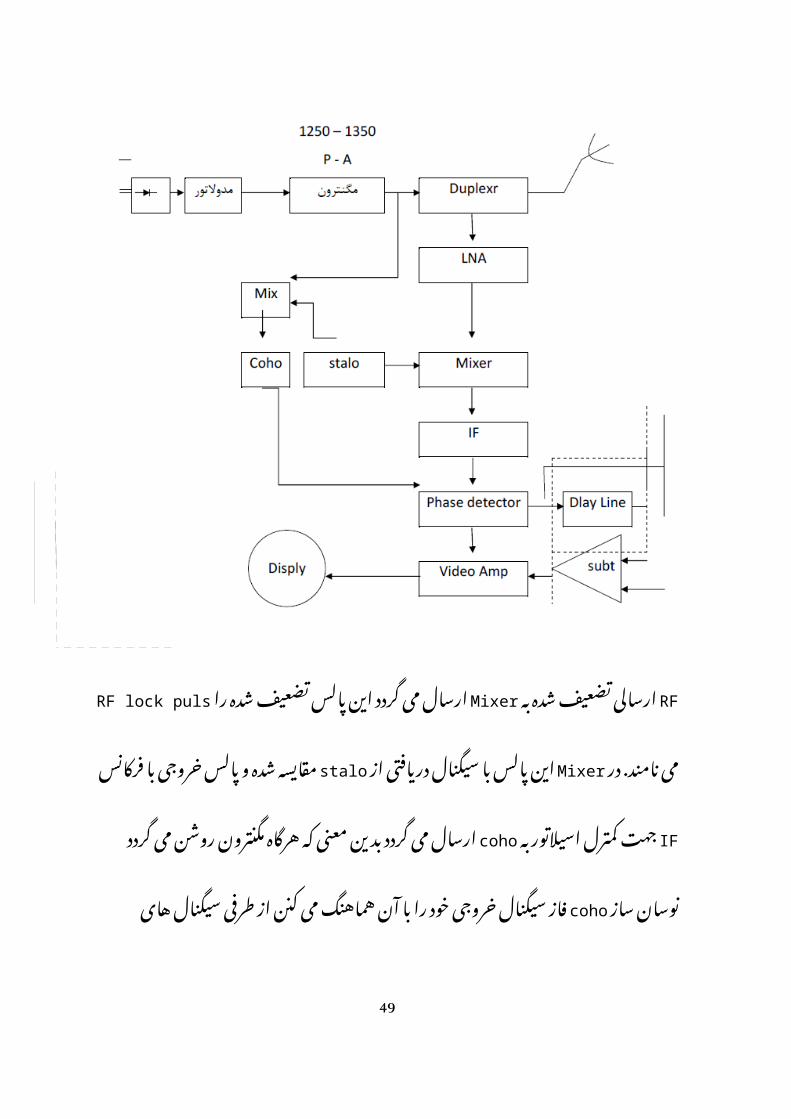
توضیح: کوهرنت یعنی این که سیگنال فرستنده و سیگنال مرجع در یک فاز نگه داشته شوند. در شکل زیر برای این که المپ مگنترون خود یک نوسان ساز پالس است و وابستگی فازی بین پالس ها ایجاد نمی نماید؛ الزم است
یک مرجع فازی برای هر پالس به وجود آید که برای این کار یک نمونه ازپالس
35

RF ارسالی تضعیف شده به Mixerارسال می گردد این پالس تضعیف شده را RF lock puls می نامند. در Mixer این پالس با سیگنال دریافتی از staloمقایسه
ارسال میcoho جهت کمترل اسیالتور به IFشده و پالس خروجی با فرکانس فازcohoگردد بدین معنی که هرگاه مگنترون روشن می گردد نوسان ساز
سیگنال خروجی خود را با آن هماهنگ می کنن از طرفی سیگنال های دریافت مقایسه و سیگنال خروجی ازstalo گیرنده با سیگنال دریافتی از Mixerشده در
IFگرفته و پس از تقویت به آشکارساز اعمال می گردد. در آشکارساز فاز با هم از نظر فاز مقایسه وcoho دریافتی با سیگنال مرجع IFاین سیگنال
خروجی آشکارساز فاز یک سیگنال ویدیویی و آیپالر است. ) دو جهته(
36

37

- محاسبه خروجی آشکارساز فاز:1-19 اگر تابع V1= A1 Sin 2π ft.t :در نتیجه سیگنال برگشتی
IF = Vecho = V2 =A2 Sin [2π (ft ± fd )−4 πft .RC
]
Vdiff = V2 – V1 = V3 = A3 Sin (2π fd . t - )
خواهد شدfdبا توجه به فرمول های فوق می بینیم که تفاوت فرکانس برابر می گردد ، که در این حالت خروجی آشکارسازfd = 0که برای هدف های ثابت
فاز تابع زمان نبوده یعنی براساس زمان تغییر نمی کند چون در معادله می شودA3 و – A3 می شود و حدود مقادیر ثابتی بین + 2π fd . t = 0مربوطه
fdکه شامل مقدار صفر نیز هست در حالی که وقتی هدف متحرک باشد
مقداری خواهد داشت ، در این صورت خروجی آشکارساز فاز تابع زمان 2π fd . t تابع زمان خواهد شد.( به عبارتی fd با تغییر فرکانس Vdiffخواهد شد )
. به طوری که می دانیم خروجی آشکارساز فاز پالس یک سیگنال0 = A نوع PPI است اگر تنها همین یک سیگنال روی Bipolar قطبی یا 2ویدیویی
قرار گیرد تشخیص هدف ثابت از متحرک بر روی اسکوپ توسط یک سیگنال امکان پذیر نیست چون هیچ تفاوتی بین هدف های ثابت و متحرک در روی یک
سیگنال ویدئویی روی این اسکوپ نیست. برای تشخیص باید چندتا از این تاویر ویدئویی را در روی اسکوپ نوع روی هم منطبق نمود چون اکوی هدف
های متحرک هر سیگنال نسبت به سیگنال های قبلی تغییر می کند در نتیجه
38
4π ftR0
C
این انطباق یا از انطباق سیگنال اولی با سیگنال حاصل می شود که هدفمتحرک به صورت اثر پروانه ای ظاهر می شود.
Aنمایش هدف متحرک به روی اسکوپ نوع :
به صورت اثر پروانه ای آشکار میAاهداف متحرک به روی اسکوپ نوع گردند اگر سیگنال ها کامال برابر باشد آن گاه حجم ثابت است و اگر سیگنال
ها با هم اختالف فاز داشته باشند هدف متحرک است.
39

فصل دوم نمایش اهداف متحرک بر
روی اسکوپ
40
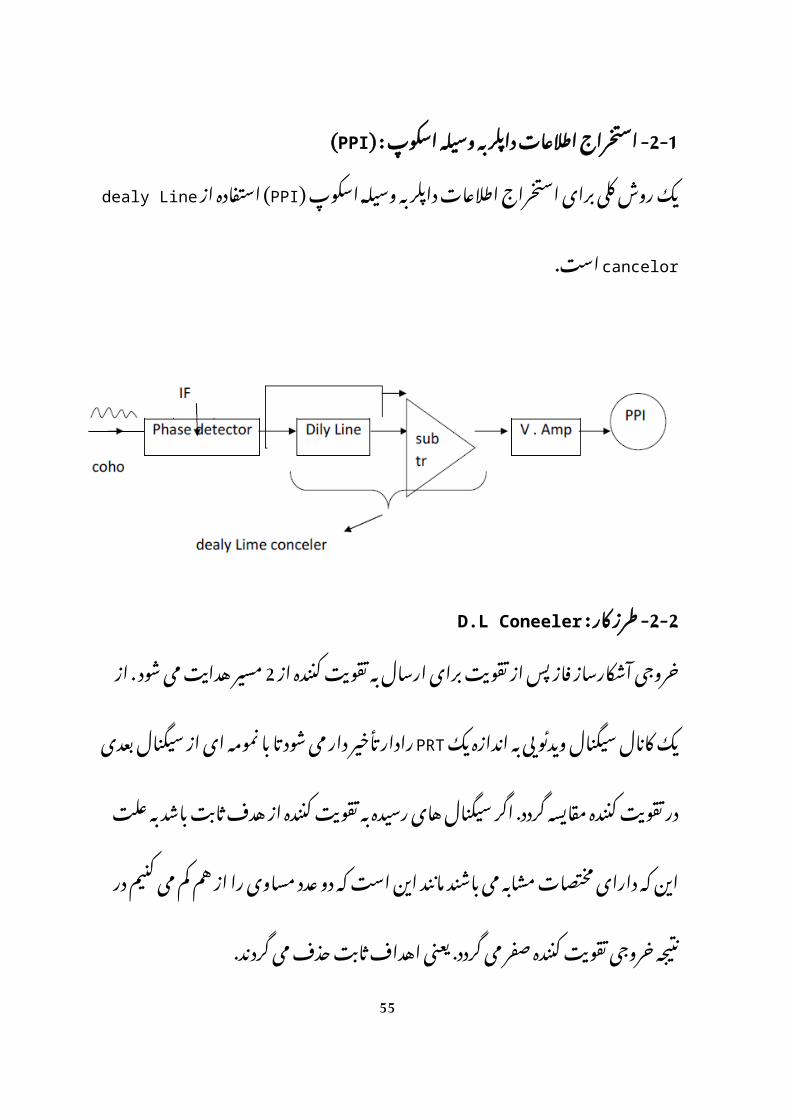
(PPI- استخراج اطالعات داپلر به وسیله اسکوپ : )2-1 ( استفادهPPIیک روش کلی برای استخراج اطالعات داپلر به وسیله اسکوپ )
است.dealy Line cancelorاز
D.L Coneeler- طرز کار : 2-2 مسیر2خروجی آشکارساز فاز پس از تقویت برای ارسال به تقویت کننده از
رادار تأخیرPRTهدایت می شود . از یک کانال سیگنال ویدئویی به اندازه یک دار می شود تا با نمومه ای از سیگنال بعدی در تقویت کننده مقایسه گردد. اگر سیگنال های رسیده به تقویت کننده از هدف ثابت باشد به علت این که
دارای مختصات مشابه می باشند مانند این است که دو عدد مساوی را از هم کم می کنیم در نتیجه خروجی تقویت کننده صفر می گردد. یعنی اهداف ثابت
حذف می گردند.
اگر سیگنال مقایسه ای از هدف متحرک باشد با هم تفاوت خواهند داشت و با مقایسه آن ها در تقویت کننده ، خروجی داشت که این خروجی یک سیگنال ویدئویی یک قطبی خواهد داشت که پس از تقویت به روی اسکوپ ارسال
می گردد.
Delay line خط تأخیر ( : عملکرد یا وظیفه( delay Lineدر مدار این است که رادار نگه می دارد تا با سمپلی از سیگنال بعدیPRTسیگنال را به اندازه یک
خود در تقویت کننده مقایسه گردد.
41
انواع خط تأخیر کدامند؟
- خط تأخیر الکترومغناطیس:2-3
42

از المان های سیف و خازن تشکیل شده و مدت زمان تأخیر از رابطه باال به دست می آید توضیح این که خطوط تأخیر الکترومغناطیسی عالوه بر سیستم های تأخیر دهنده در مدوالتورهای رادار کاربرد دارند و می توانند پالس هایی
می گویند. PFN تولید کنند که به آن µ sec 100 تا µ sec 0.1به عرض
در این صورت عرض پالس رادار از رابطه زیر محاسبه می گردد.
Pw = N√LC
هرچه عرض پالس بیشتر باشدPFN.سنگین تر و گران تر است
43

PFN- مدوالتور : 2-4
هنگامی که خازن ها دشارژ می شوند ممکن است مقداری انرژی در آن ها بماند این قسمت انرژی را زمین می کنند.
کردن قطع پالس می شود. پالس در زمان دشارژ خازنPCسلف: باعث شکلی به صورت زیر دارد که سلف آن را صاف می کند.
:Chargin.جریان شارژ خازن ها را کنترل می کند
دیود: از ورود جریان به منبع جلوگیری می کند.
44

پالس ترانس : در یک محفظه محفظه ی روغن نگهداری می شود. و باعثکوپل ولتاژ می شود.
نکته: حداکثر توان زمانی انتقال پیدا می کند که بین دو مدار تطبیق امیدانس حاصل می شود.
آن در حد چند میلی ثانیه یا باالتر است خط تأخیرPRTدر رادارهایی که الکترومغناطیسی قابل استفاده نیست به علت این که مدار آن سنگین و
45
گران تمام می شود. در این گونه موارد از خط تأخیر ماوراء صوت استفادهمی شود.
دارد.PRTطول لوله بستگی به
- خط تأخیر از نوع فیوز کوارتز2-5 µ 1زمان عبور انرژی ماوراء صوت از جیوه برای ایجاد یک تأخیر زمانی حدود
sec 150 نیاز به یک لوله استوانه ای در حدود cmدارد. نوع دیگر خط تأخیر یک چند ضلعی نا منظم است که یک حساس کریستالی از نوع پیزو الکترونیک
جهت تبدیل امواج الکترومغناطیس به صوتی و برعکس متصل گردیده است رادار را به وجود میPRTاین امواج پس از برخورد به وجه ها تأخیری برابر
آورند.
46

- خط تأخیری دیجیتالی:2-6
وسایل ذخیره کننده بر اساس1970خط تأخیر دیجیتالی در اوایل سال تکنولوژی کامپیوترهای دیجیتالی جایگزین خط تأخیری صوتی و
الکترومغناطیس گردید.
طرز کار این سیستم؛ استفاده از خط تأخیر دیجیتالی نیازمند این است که به یک سری از کلمات دیجیتالی تبدیلMIT در گیرنده Phase detectorخروجی
( ذخیره شده و سپس باmost memoryگردیده و سپس در حافظه کامپیوتری ) مقایسه گردد برای ایجاد کلمه دیجیتالی ابتداsubtractorکلمه دیجیتالی بعدی در
باید از سیگنال خروجی آشکارساز فاز نمونه برداری کرد و سپس این نمونهها را کوانتیده نمود و سپس به یک کلمه دیجیتالی تبدیل نمود.
توضیح: فشردگی و کم زحمت بودن به کارگیری پردازش سیگنال دیجیتالی های پیچیده تری با مختصات فیلتری شده که باdelay line cancellerباعث ساخت
روش های آنالوگی عملی نیستند.
47

:delay line canceller- مشخصات فیلتری 2-6
و یکsin شامل یک عبارت subtractorدر این جا می بینیم که تابع خروجی برابر صفر شود کل تابعsin می باشد. در هر حالت که این تابع cosعبارت
صفر می گردد. در نتیجهdealy line cancellerصفر می گردد در نتیجه خروجی PRF است که PRF/1 رادار و برابر T = PRT قرار می دهیم Sin π fd . T = 0تابع
= fd در اینجا نتیجه می گیریم Sin π fd 1/fp = 0 می گیریم در نتیجه fpرا هم برابر
nfp بنابراین با توجه به رابطه fd = 2Vrλ:که جایگزین کنیم
Vn = n .λ . fd / 2
Vn ≈ n . λ . fd( جایگزین کنیم: nm را برحسب ناتیکال مایل )Vاگر
48

صفر می گردد.subtractorکه در این شرایط خروجی
سرعت کور: اگر هواپیما سرعتی داشته باشد ، با توجه به زاویه دید رادار یک ( را به رادار اعمال می کند که این سرعت نسبی فرکانسVrسرعت نسبی )
باشد این هدفPRF رادار یا مضربی از PRFداپلری ایجاد می کند که برابر قابل کشف برای رادار نیست که این سرعت را سرعت کور می گویند.
Single Delay Line Canceller- منحنی پاسخ فرکانس : 2-7
- تحلیل سرعت کور برای رادارهای مختلف:2-8 ی پالسی می باشد. پس نتیجهMTIسرعت کور یکی از محدودیت های رادار
از تأثیر سرعت کور مصون است. اگر قربار باشد اولینCWمی گیریم رادار سرعت کور برای رادار بیشتر از حداکثر سرعت نسبی )شعاعی( در نظر
λ × fp مقدار Vn = n . λ . fpگرفته شده برای هدف باشد باید بر اساس رابطه
بزرگ باشد.
زیاد یا هردوPRF باید با طول موج بلند یا فرکانس پایین یا MTIبنابراین رادار خصوصیات کار کند تا از سرعت کور جلوگیری شود.
49

متأسفانه در رادار محدودیت های دیگری عالوه بر سرعت کور وجود دارد که رادار هستند.PRFتأمین کننده طول موج و
محدودیت های رادار فرکانس پایین این است که پهنای بیم برای ابعاد معین از آنتن نسبت به پهنای بیم در فرکانس های باال زیادتر است بنابراین در
) تفکیک زاویه ای( یا دقت زاویه ای از اهمیتAnglar resolutionکاربردهایی که خاصی برخوردار باشند مناسب نیستند بنابراین افزایش طول موج به طور
دلخواه امکان پذیر نیست.
PRFرا نیز نمی توان از یک حدی بیشتر کرد زیرا آن بر اساس حداکثر فاصله بدون ابهام مورد نیاز تعیین می گردد.
Rum km = 0.15 × PRT
PRT = 1 / PRF داشتیم که
( قابلStager PRF متغیر )PRFتوضیح این که اثر سرعت کور با استفاده از کنترل است.
حذف کننده های خط تأخیر مضاعف:
( Double Delay Line Canceller)
همیشه آن وسعت راdelay line cancellersignalبه علت این که پاسخ فرکانس مورد نظر ندارد و با عبور دادن خروجی ازDCبرای حذف کالتر در محدوده
با اولی بسته شده است میCascade دیگر که به صورت delay line cancellerیک توان این نتیجه را تا حد زیادی بهبود بخشید.
f(t+T) f(t+2T)
50
باشد تابعy = f(t)سوال/ اگر حذف کننده خط تأخیر مضاعف به صورت خروجی به چه صورتی خواهد بود؟
Y1= f (t)
Y2= f (t)-f (t+T)-f (t+T) +f (t+2T)
Y3= f (t)-2f (t+T) +f (t+2T)
:Doubledelay line canceller- پاسخ فرکانس2-9 delay line cancellersignalبا توجه به توضیحاتی که قبال در مورد پاسخ فرکانس
دادیم ابتدا عوامل مؤثر در پاسخ فرکانسی اسن گونه سیستم ها را بررسی و delay را با پاسخ فرکانسی Doubledelay line cancellerسپس پاسخ فرکانسی را
line cancellersignal .مقاسیه می کنیم
پاسخ فرکانس یک نمودارایده آل است و درحالت هایی صفر می گردد، زمانی رادار یا هارمونیک هایPRF ( مساوی صفر با مساوی fdکه فرکانس داپلر )
آن باشد، ولی در عمل چنین نیست. چون درخت گرچه ثابت است ولی بر اثر باد به حرکت در می آید و باعث تولیر خروجی در نقاط صفر تئوریکی می
گردد. همچنین ناپایداری سیستم )فرستنده و گیرنده( باعث ایجاد خروجی ازهدف های ثابت در نقاط صفر تئوریکی می گردد.
51

ولی عامل اصلی ایجاد اصلی ایجاد خروجی در نقاط صفر تئوریکی اسکنناپایدار بیم بر روی هدف است. توضیح این که :
هرگاه بیم از روی شی عبور کند دامنه سیگنال برگشتی دریافت شده از آن شی از یک پالس به پالس دیگر تغییر کند باعث حرکت ظاهری در شی ثابت
می گردد.
به طور کلی چنین نتیجه می گیریم که حذف کننده خط تأخیر در نقاط صفر تئوریکی دارای خروجی ناخواسته می باشد که در شکل زیر نشان داده شده
است.
یا در فرکانس های داپلرDCبرای حذف سیگنال های ناخواسته در محدوده استفاده می شود کهDoubleDelay Line canceller یا هارمونیک هایآن از PRTبرابر
منحنی پاسه فرکانسی این سیستم با خط قرمز در شکل فوق نشان داده شده است. منحنی پاسخ فرکانسی در این حالت به گونه ای است که دارای وضعیت بهتری بوده یعنی بیشتر کالتر در محدرده نقاط صفر تئوریکی حذف
می گردد.
درصد حذف :
Cancelation Rote
در حذف کالتر را درصد حذف می نامند )واینDelay Line cancellerمیزان تأثیر به دامنه هماانMTIنسبت دامنه سیگنال کالتر بعد از عمل حذف در سیستم
52

Single Delay Lineسیگنال بدون عمل حذف می باشد این میزان برای از
canceller 15 ، بینdb تا db20 می باشد ولی برای DoubleDelay line canceller، db30می باشد.
تضعیفdb20 تا 15db کالتر را بین Single Delay Line cancellerمنظور این است که روی کالترdb30 این تضعیف را درود Delay Line cancellerDoubleمی کند ولی
انجام می دهد.)
:Transversal filters- فیلترهای متقاطع 2-10 پالسه که قبال به آن اشاره گردید خود یک فیلتر متقاطع است.Nحذف کننده
حذف کنندهN پالسه از N-1 ، Delay Line.تشکیل شده است
نامیدهweight وارد می شود، Summerدر این فیلترها ضرایب پالس ها که به بود که ضرایبweight = 1, -2 , 1می شود که با توجه به حذف کننده سه پالسه پالس ها از فرمول کلی زیر به رست می آید.
Wi= (-1)i-1 n!(n−i+1 ) !(i−1)
I= 1 , 2 , 3 , … , n+1
منحنی پاسخ فرکانسی تابع زیر به دست می آید. 53

Sinn π fd.T
2-11 -STAGER PRF ( PRF:)متغیر استفادهPRF یا چند PRFاگر رادار طوری طراحی گردد که بتواند بیشتر از یک
کند. دارای مزایای زیر است.
اثر سرعت کور را کاهش می دهد. .1 شیب منحنی پاسخ فرکانس را افزایش می دهد ) این عمل اثر کالتر را.2
کاهش می دهد (
اگرPRFرا زیاد کنیم ممکن است ابهام در خاطر به وجود می آید : خوف وکوف هدف اتفاق می افتد.
از ابهام در داپلر جلوگیری می کند..3
54
به صورت متغیر در کاهش سرعت کور در رادارهایPRFمثال/ اثر استفاده از را بدست آورید. cm 10 با طول موج PRF 600, 700 , 800با
55

56

جهت جلوگیر از سرعت کور در شکل صفحه قبل نشانPRFاثر استفاده از داده شده است:
پالس در ثانیه مورد استفاده قرار600 , 700, 800 با مقادیر PRF 3در اینجا گرفته و نمودار پاسخ فرکانس هرکدام به طور مجزا رسم شده و نمودار
λ می باشد برای رادار با Nچهارم نشان دهنده پاسخ فرکانس ادغام شده هر
= 10cm اولین سرعت کور مشترک بین PRF N 560در این مثالknmاست که این مقدار بیشتر از حداکثر سرعت شعاعی یا نسبی در نظر گرفته شده برای
هدف های کنترل هوایی است در صورتی که اولین سرعت کور به تنهایی است.80nm سوم PRF و برای 70km دوم PRF و برای 60kn اول PRFبرای
PRF:متغیر به دو صورت ممکن است تولید گردد
یکی به صورت اسکن به اسکن و دیگری به صورت پالس به پالس.
مزیت روش اسکن به اسکن:ا.سادگی رادار در ساختار(1
57

) البته پس از ارسالMTIحذف سیگنال های بازگشتی کالتر در سیستم (2پالس دوم(
مزیت روش پالس به پالس:ب. دریکه فرکانس های داپلر مورد نظر دستیابی به پاسخ فرکانسی خوب امکان
پذیر است.
:Stager PRFمحدودیت
ناتوانی آن در حذف سیگنال های بازگشتی کالتر پس از ارسال پالس دوم می باشد زیرا چنین کالتری در محدوده مشابه ای از یک پالس به پالس دیگر
ظاهر نمی گردد.
:Stager به صورت PRF- روش تولید 2-12
58

PRF generator( پالس های محرک Triger pulsیکنواختی را ایجاد می کند که به) با یکدیگر فاصله دارند. فاصله این پالس ها توسط یک موجT. µ secاندازه
( به گونه ای تغییر می کند که در یک مسیر بدون تأخیر و یکgate pulsمربعی ) و مدوالتورPRF متناوبا بین تولید کننده D µ secمسیر با تأخیر به اندازه
وT0 = Dفرستنده ایجاد می گردد بنابراین زمان پالس های ارسالی متناوبا با T0 - D.خواهد بود که در شکل فوق نشان داده شد
( در مدار گیرنده تعبیه شدهSwitching Delay Lineیک خط تأخیر سوئیچ کننده ) Trاست بنابراین این سیگنال های بازگشتی از هدف پس از یک مدت زمانی
( به صورتی است که در زمان هاییgateبه گیرنده باز می گردد. موج مربعی ) که پالس فرستنده تأخیر یافته سیگنال های دریافتی بدون تأخیر می ماند و
بالعکس زمانی که پالس فرستنده با تأخیر ارسال می گردد سیگنال هایدریافتی دارای تأخیر خواهند بود.
59
در شکل نمایانگر امواج دریافت4 و 3این عمل با مقایسه شکل موج های شده در ورودی و خروجی خط تأخیر سوئیچ کننده قابل رویت می باشد
بنابراین سیگنال های برگشتی از هدف در ورودی خط تأخیر حذف کننده ازیک پالس به پالس دیگر نسبت به پالس های محرک یکنواخت تغییر می نماید.
- فیلترهای داپلر با کمترل فاصله:2-13
Delay Line Cancellerبه عنوان یک فیلتر در محدوده زمان به طور گسترده در به جداسازی هدف متحرک از کالترهای ثابت به کار می رود. اگر ماMTIرادار
( از فیلترهای داپلر به تنهایی استفادهD. L. Cبخواهیم به جای این سیستم ) کنیم اطالعات فاصله را از دست خواهیم داد. بنابراین فیلترهای داپلر را با
به کار می بریم.Range Gateسیستمی به نام
گیت های کنترل فاصله مانند سوئیچی عمل می کنند که در زمان های از قبلتعیین شده باز و بسته می شوند.
10nm-5برای مثال اگر گیتی برای عبور سیگنال های یکه اهدافی که در فاصله
× t=5 باز و پس از t=5 × 12.34 µ secقرار گرفته اند. پس از ارسال پالس گیت
12.34 µ sec.بسته می شود
60
:Box Car Generator خروجی های گیت کنترل فاصله به مداری به نام Box Car
Generatorاعمال می گردد. کار این کمک به عمل فیبتر کردن فاصله بر اساس می باشد.PRFفرکانس مدوالسیون و حذف هارمونیک های
جهت حذفBand pass Doppler Filter به یک مدار Box Car Generatorخروجی کالترها اعمال می گردد. که عرض باند فرکانس این فیلتر به وسعت طیف
اعمالFull wave liner detectorکالتر مورد نظر دارد. که خروجی این مدار به یک می گردد. کار این مدار آشکارسازی و تبدیل ویدیویی درو قطبی به ویدیویی
عبور می نمایدlow pass Filterیک قطبی است. خروجی این مدار از یک مدار که کار این مدار کم کردن اثر نویز و تطبیق امبدانس با مدار بعدی است.
Thresholdسطح آستانه(: سیستم سطح آستانه فقط سیگنال هایی را به( عنوان هدف عبور می دهد که دامنه سیگنال آن ها از سطح سیگنال تعیین
شده ) سطح آستانه ( عبور نماید.
گونه اعمال می شود. یا2سطح آستانه در سیستم های راداری به ثابت است و یا قابل تنظیم که توسط متخصصین رادار بر اساس
شرایط منطقه و سیگنال های برگشتی تنطیم می شود. و در رادارهایجدید این سطح آستانه توسط کامپیوتر تنظیم می شود.
منحنی پاسخ فرکانس این سیستم به صورت زیر است:
پردازش دیجیتالی سیگنال:61

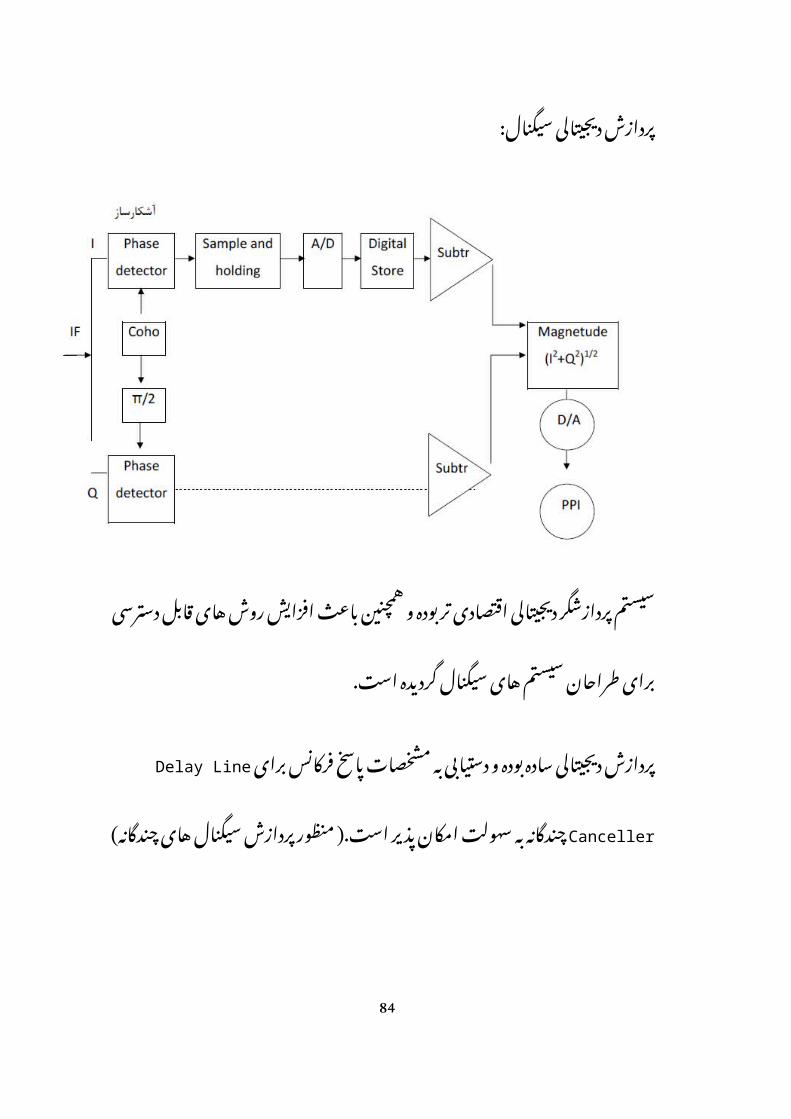
سیستم پردازشگر دیجیتالی اقتصادی تر بوده و همچنین باعث افزایش روش های قابل دسترسی برای طراحان سیستم های سیگنال گردیده
است.
پردازش دیجیتالی ساده بوده و دستیابی به مشخصات پاسخ فرکانس برایDelay Line Cancellerچندگانه به سهولت امکان پذیر است.) منظور پردازش
سیگنال های چندگانه(
این عمل اثر کالتر را بسیار بهبود می بخشد) حذف کالترهای دریایی بهعلت امواج دریا و متحرک بودن آن ها در این روش قابل حذف است(
این سیستم ها به علت استفاده از نرم افزار به جای سخت افزار در پردازش سیگنال تولید کمتری کرده در نتیجه اثر نویز حرارتی بسیار کم
است.
- شرح کار سیستم:2-14 از دو کانال هدایت می شود.IFدر این سیستم خروجی تقویت کننده ی
با همπ / 2 که سیگنال مرجع این دو کانال Q و دیگری کانال Iیکی کانال 62
اختالف فاز دارند که این دو کانال را کانال عمود بر هم گویند. که یکی از راه های از بین بردن فاز کور استفاده از این دو کانال برای پردازش
است.
خروجی آشکارساز فاز توسط سیستم نمونه برداری می شود. میزان نمونه برداری در این سیستم بستگی دارد به فرکانس نمونه برداری
سیستم . هرچه فرکانس نمونه برداری سیستم بیشتر باشد دقت اندازه به کلمات دیجیتالیA/Dگیری بیشتر است. این نمونه ها توسط قسمت
ذخیره میDigital Storeتبدیل می گردند و سپس این کلمات دیجیتالی در ( مقایسهSub Tractor ) یا همان CPUگردند و با کلمات دیجیتالی بعدی در
می گردند. مدت زمانی که این کلمات دیجیتالی در حافظه می مانند به برای مقایسه با سیگنال بعدی می باشد. PRTمدت زمان یک
همانطور که در شکل مشخص شده است سیگنال ها در با هم جمع میشوند ، بر اساس فرمول زیر:
(I2 +Q2)1/2
و به اندازه ای نیز تقویت می شوند که اگر باشد:
√2 I 2=I √2
برتری های پردازش دیجیتال نسبت به آنالوگ:
سیستم دارای پایداری بیشتری است..1سیستم نسبت به درجه حرارت حساسیت کمتری دارد..2قابل اعتمادتر است..3 آن آسان تر است.PRTکنترل .4
MTI- محدودیت های عملکرد رادار : 2-15 عوامل دیگری به جز طراحی پردازشگر سیگنال داپلر بر بهبود نسبت سیگنال
به کالتر اثر می گذارند این عوامل عبارت است از:
63
ناپایداری فرستنده.1ناپایداری گیرنده.2حرکت های فیزیکی کالتر .3مدوالسیون اسکن آنتن.4
راMTIبرای بررسی اثر این عوامل ابتدا باید پارامترهای اساسی رادار بررسی و شناسایی کنیم.
(Improvement factor- ضریب بهبودی : ) 2-16
(Sub clutter visibility- قابلیت دید در کالتر : ) 2-17 در آشکارسازی اهداف متحرک آمیخته شده با سیگنالMTIتوانایی سیستم بیان می شود.db( می گویند و برحسب SCVاهداف ثابت را )
50مثال / db
50 = 10 log X2/X1 5= log X2/X1
Log 105= log X2/X1X2/X1 = 105
64

اگر سلول تفکیک یک رادار بزرگتر از دیگری بوده و باعث دریافت توان بیشتری از کالتر گردد حتی اگر قابلیت دید در کالتر آن ها یکسان باشد ممکن است قدرت آشکارسازی یکسانی از هدف در کالتر نداشته باشند. بنابراین یک
�db ، SCV 30 درجه ای معموال 1 پهنای پالس و با پهنای بیم µ sec 10رادار با برایµ sec 1 درجه و پهنای پالس 10بیشتری از یک رادار با پهنای بیم
عملکرد یکسان نیاز دارد.
به کالرت باقی مانده درMTIتضعیف کالتر: نسبت توان کالتر در ورودی خروجی را تفکیک کالتر می نامند.
ناپایداری سیستم: به مکانیزمی گفته می شود که تغییرات پالس به پالس برروی هدف های ثابت را به پردازشگر داپلر القا نماید.
این تغییرات عبارت است از :
تغییرات فاز -1تغییرات فرکانس-2تغییرات دامنه-3تغییرات عرض پالس-4
تغییر فاز داشته باشیم:Δθاثر تغییرات فاز: به عنوان مثال اگر به اندازه
اثرات تغییرات فاز در نوسان ساز را در نظر می گیریم : اگر سیگنال باشد در پالس دوم بهA Cos ωtبرگشتی از کالتر در پالس اول به صورت
خواهد بود بنابراین اختالف بین این دو پالس در تفریقA Cos (ωt + Δθ)صورت کننده به صورت زیر ظاهر می گردد.
A Cos ωt
A Cos ωt - A Cos (ωt + Δθ) = 2A Sin( Δθ2 ).Sin (ωt+
Δθ2 )
A Cos (ωt + Δθ)
65

رادیان باعث محدود شدن ضریب بهبودی به1/100یک تغییر فاز به اندازه می گردد.40dbاندازه
)2A Sinاگر تغییرات خیلی کم باشدΔθ2 )≈ A (Δθ)
/2IC1 = IC × 1(Δθمحدویت در ضریب بهبودی )
- اثر تغییرات فرکانس:2-18
محدودیت های ایجاد شده در ضریب بهبودی توسط ناپایداری پالس به صورتزیر است:
IC2 = IC ×1
(π ×∆ f ×z)2
عرض پالس
اثر تغییر دامنه:
IC3 = IC ×1
( A∆ A
)2
:اثر تغییر عرض پالس
IC4 = IC ×1
(∆ t)2+2βZ
ضریب فشردگی پالس
66

(Internal Clutter Fluctuation- نوسانات داخلی کالتر: ) 2-19 همانطوری که قبال گفته شد در اثر ناپایداری سیستم و یا حرکت های فیزیکی
Subو در نتیجه باعث خروجی در تفریق کننده )MTIکالتر باعث خرابی رادار
Tractorمی گردد و یا صفحه رادار را غیر قابل استفاده می کند و یا توانایی ) را کاهش می دهد.MTIسیستم
برای بررسی این موضوع نمونه هایی از یک طیف کالتر خاص را به صورتیک تابع معرفی نموده و تأثیر عوامل را روی آن بررسی می کنیم.
W(f)= |g(f)2| = |g0|2 exp|- α ( f/f0)2|
در این رابطه:
W(f)طیف توان کالتر به عنوان تابعی از فرکانس :
g(f))تبدیل فوریه ی موج ورودی ) سیگنال برگشتی :
f0)فرکانس حامل رادار ) فرکانس موج کریر :
α:پارامتر مربوط به نوع کالتر و مقادیر برای انواع کالتر به شرح زیر است :
=1017α × 2.3تپه های پر درخت با وزش باد .1 =1019α × 3.9تپه های کم درخت و روز آرام .2 =1016α × 1.4اکوی برگشتی از دریا .3 =1015α × 2.8ابرهای باران زا .4 =1016α × 1برای چف .5
طیف توان کالتر را به صورت عبارتی از مقدار موثر بسط فرکانس کالتر )Clutter Frequency Sprod که با )Cδنشان می دهند و برحسب هرتز بیان می
بیان میm/s و برحسب Vδشود یا به صورت مقدار موثر بسط سرعت کالتر گردد که می توان به صورت زیر نوشت:
1- W(f)= |g(f)2| = |g0|2 exp|- α ( f/f0)2 |
2- W(f)= W0 exp ( - f2/8δc2) = W0exp ( - f0
2λ2 / 8δv2)
67
که عبارت بسط سرعت موثر معموال روش مورد قبول برای توصیف تغییراتطیف کالتر می باشد که در این حالت ضریب بهبودی عبارت است از :
3- IC=( SO/CO )ave=( SO )ave× Ci =
(
SO )ave × CA
Si/Ci Si CO Si
ضریب تضعیف از رابطه ی زیر به دست میSingle Dealy Line Cancellerبرای آید:
4- CA = ∫0
∞
W ( f )df
∫0
❑
W ( f )∨H (f )∨¿2df ¿
است .Single Dealy Line Canceller )تابع پاسخ فرکانسی ( H(f)که در این جا به صورت زیر هم می توان نوشت:H(f)بنابراین
1- H(f) = 1- exp (-j 2π ft) = 2j sin (π ft) exp ( - j π ft)
c « 1/Tδ و با فرض این که 4 در رابطه ی 5 و 2با جایگذاری رابطه
2-
CA=
∫0
∞
❑w0 exp (-f2/ 2δc2) df
CA
=
0.5
∫0
❑
❑w0 exp (- f2/2δc2) 4 sin2 πft . df 1-exp 9-2π2T2 δc
2
68

می تواند باexp ( کم باشد عبارت exp نمای مخرج ) مقدار 6اگر در رابطه ی جایگزین شود در نتیجه خواهیم داشت:2 عبارت اول بسط سری رابطه 2
69

3- CA=
Fp2
=
fp2 λ2
=
α fp2
4π2δc2 16 π2δv
2 2π2f02
را به دست آورید.IC باشد Single Dealy Line Canceller ، 2 در Gainمثال/ اگر
IC=G × CA
4- IC1=
Fp2
=
fp2 λ2
=
α fp2
2π2δc2 8 π2δv
2 π2f02
70

db 6 که بهره متوسط آن Double Dealy Line Cancellerبه طور مشابه برای
باشد ضریب بهبودی از رابطه زیر محاسبه می شود.
5- CA=
Fp2
=
fp4 λ2
=
α2 fp2
8π2δc2 128 π4δv
4 2π4 f04
به هرحال باران ، چف و اکوی دریا می توانند سرعت متوسطی غیر صفر در نظر گرفتهMTIداشته باسند که باید در سطاحی پردازشگر سیگنال رادار
نمایش9 و 8شود. وابستگی طیف کالتر به فرکانس همانگونه که در رابطه داده شده است برای محدوده فرکانسی خیلی زیاد کابرد مناسبی ندارند زیرا
تغییرات سطح مقطع راداری هر پراکنده کننده به عنوان تابعی از فرکانسدر این رابطه منظور نگردیده است.
که ابعاد آن هاλ = 0.86 cm در حالی که kaمثال شاخ و برگ درختان در باند قابل مقایسه با طول موج است دارای خواص انعکاسی متفاوت نسبت به
است می باشند.λ = 1.35 cm که VHFباند خط تأخیر:N-1 پالسه با Nتوصیف کلی ضریب بهبودی برای حذف کننده
6- INC= 2¿
¿ !( fp2 πδc
)2∋¿ ¿
Ni=N-1
71
فصل سوم نوسانات داخلی کالتر در
رادار
72

MTI- محدود کردن گسترش طیفی کالتر در رادار : 3-1 در رادارهای مدرن عموما کوشش می شود تا از محدوده دینامیکی
مناسبی برای عبور پیک کالتر بدون این که گیرنده رادار را اشباع نماید )محدود کننده( در ابتدای بخش تقویتLimiterاستفاده گردد. معموال یک
مورد استفاده قرار می گیرد تا ازMTI قبل از پردازشگر IFکننده کالترهای سیگین که موجب اشباع رادار می شود جلوگیری کند. ) این
سیستمی است که یک پالس منفیSTC می نامند( STCسیستم را جهتIF تقویت کننده Biosing به منظور تنظیم IF ampجهت اعمال به
و جلوگیری از اشباع گیرنده به کار می رود. IFکنترل دامنه سیگنال (Air born-MTI-radar با سکوی پرنده )MTIرادارهای
جهت آشکارسازی کشتی ها توسط هواپیمای گشتی و همچنین اهداف در ارتفاع کم رادارهای جستجوگر مستقر روی هواپیما ساخته شد.
نقش اساسی این رادارها عبارتند از:گسترش فاصله آشکارسازی هدف های دارای ارتفاع کم در فاصله دور.1آشکارسازی کشتی ها در دریا و هدف های مشخص زمینی.2پیدا کردن موقعیت و عمل سیستم های اخاللگر.3ردیابی هدف ها و جهت یابی هواپیماهای رهگیر.4
توضیح این که این رادارها با وسعت دیدی که دارند جهت آشکارسازی هدف ها در مقابل کالتر دریایی و زمینی مورد استفاده قرار می گیرند
این رادارها جهت کم کردن اثر کالتر قادرند زاویه آنتن خود را تغییر کیلومتری خود را نمی بینند که40 یا 30دهند )رادارهای زمینی تا حدود
این به خاطر وجود لوب های فرعی است ولی در رادارهای هواپایه اینمشکل وجود ندارد یا خیلی کم است(.
استفاده می شود. ) یا بهNon Coherent MIT( از AMTIدر این رادارها ) هستند( و برای کشفNon Coherent MITعبارت دیگر این رادارها از نوع
اهداف ثابت و آشکارسازی اهداف متحرک از تغییرات دامنه استفادهمی کنند.
73

Non Coherent MIT Radar- بلوک دیاگرام : 3-2
RADAR MIT( بلوک دیاگرام 5-3شکل )
یکه راداهای متحرک از رادارMTI.غیر کوهرنت استفاده می نمایند
( :AMTI- مشکالت خاص در طراحی رادار )3-3ارتفاع بسیار باالی سکو -1
فشار هوای خاصی درون موجبر نیاز است و این هوا باید خشک باشد که برای این منظور هوا را از کانال هایی عبور می دهند تا رطوبت هوا را بگیرد که
داخل موجبر ایجاد جرقه نکند.
74

متحرک بودن هواپیما-2محدودیت های وزن ، حجم و توان-3 درجه(360محدودیت های پوششی ) از نظر دید -4
- رادارهای پالس داپلر:3-4 کار می کند یعنی باMTIرادارهای پالس داپلر بر اساس اصول کلی رادار
استفاده از فرکانس داپلر برای تشخیص و آشکار سازی هدف های متحرک از( عمل می نماید.Clutterهدف های ثابت )
یکی از فرق های مهم و اساسی رادار با رادار پالس داپلر:
زیاد کار می کند و باعث ایجاد فرکانس داپلر بدونPRFرادار پالس داپلر با ابهام می گردد.
مورد نیاز باید حداقل دو برابر فرکانس داپلر در پایین باشد.PRFتوضیح اینکه:
رادارهای پالس داپلر در کاربردهای هوایی نظیر آواکس به علت این که نیاز بهPRF.کم دارند کاربردی ندارند
این نوع رادارها خصوصا در مقابله با چف و کالتر جوی موثر هستند.
PRFیکی از نقاط ضعف این رادار وجود نقاط کور در فاصله است که به علت
زیاد به وجود می آید.
75

این رادار بیشتر از سیستم های گیت های کنترل فاصله به صورت مجموعه ی استفاده می نماید و در فرستنده ازDelay Line Cancellerصافی داپلر به جای
المپ کالسیترون به جای مگنترون استفاده می گردد.
بلوک دیاگرام رادار پالس داپلر به صورت زیر است:
رسم طیف کالتر و هدف برای ارسال یک تک خط طیفی از سکوی متحرک بهصورت زیر است:
76

فرکانس های سیگنال برگشتی ازside lopبه دلیل وجود لوپ های فرعی یا از فرکانس حامل تغییر یابند.±2Vr/λکالتر ثابت می توانند به اندازه
کالتر دارای پیک باندی است که از سیگنال برگشتی از کالتر در بیم اصلی )main beam ایجاد گردیده است برای هدف های نزدیک شونده )fd=2(Vr+Vf)/λو
fd=- 2(Vr+Vf)/λبرای هدف های دور شونده
:Dopler resolutionتفکیک داپلر
در این گونه رادارها داپلر ریزولوشن توسط پهنای باند فیلتر داپلر تعیین میگردد.
:Issodops
طیف کالتر زمینی در رادارهای پالس داپلر نشنان دهنده خطوطی با است که در اثر حرکت افقی سکویIssodopsانعکاسات داپلر ثابت به نام
77

رادار به وجود می آید و به گونه ای است که می توان حلقه های متحدالمرکزی به آن ها اطالق نمود.
Issodopsها نمایانگر تالقی زمین و سطح یک مخروط در اطراف بردار سرعت رادار هستند.
- سیستم های پالس داپلر:3-5 در طراحی رادارهای پالس داپلر آن چه که باید اساسا مد نظر قرار گیرد
PRF برای کاربردهای مختلف مورد نظر است. حالت های انتخاب PRFانتخاب
عبارت است از:
1.Low PRF Radars
2.Medium PRF Radars
3. High PRF Radars
4.Mods PRF Radars
:low PRFرادارهای پالس داپلر
این رادارها برای کاربردهای فاصله بدون ابهام و در کاربردهای سطحی وماوراء افق مورد استفاده قرار می گیرد.
ها( از انواع دیگرRange Gateدر این نوع رادار تعداد گیت های کنترل فاصله ) رادارهای پالس داپلر بیشتر است و بالعکس فقط تعداد کمی فیلتر داپلر به
کار گرفته می شود.
را با فیلتر داپلر پر می نمایند.PRFمحدوده فرکانسی بین خطوط
78

STC توانایی آن در محدود کردن کالتر ورودی توسط low PRFبرتری اصلی نوع
می باشد.Limiterیا
در این نوع رادار گستردگی طیف کالتر در لوپ اصلی ) بیم اصلی ( در درجه اول به وسیله سرعت هواپیما، پهنای بیم آنتن و زاویه بیم در سمت تعیین می
گردد.
:High PRFرادارهای پالس داپلر
دارای داپلر بدون ابهام هستند.High PRFرادارهای
( در کالتر سنگین بهLook Downاساسا در کاربردهای هوایی جهت دید پایین )کار گرفته می شود.
در این نوع رادارها داپلر های هدف که در خارج از لوپ فرعی ظاهر میشوند می توان در محیطی که نویز آن محدود شده است آشکارسازی نمود.
در کاربردهای هایی این است که هدف های زمینیHigh PRFیکی از خصویات متحرک کند قابل حذف هستند چون یک چنین طیف گسترده داپلری برای
پردازش هدف وجود دارد.
بزرگ ترین محدودیت این رادارها در کاربردهای هوایی توانایی محدود آن در آشکارسازی هدف های متحرک در سرعت هایی است که باعث می گردد که
فرکانس داپلر این گونه هدف ها در محدوده کالتر لوپ های فرعی ظاهرگردد.
:Mediom PRF- رادارهای پالس داپلر 3-6 این گونه رادارها اساسا د رکاربردهای هوایی که نیاز به آشکارسازی هدف
( باشد مورد استفاده قرار می گیرند. اینTail – chase targetهای تعقیب کننده ) نوع رادارها در کاربرهای هوایی باعث حذف هدف های متحرک کند و ایجاد پوشش برای همه جنبه های هدف ها که در مناطق بدون ابهام کالتر لوپ
فرعی ظاهر گردند ایجاد اطالعات دقیق فاصله می گردد.
79
:PRFفاصله یابی با چند
تاKHz 100 چند تایی بین PRF زیاد استفاده از PRFرد رادارهای پالس داپلر با 300 KHzبرای جلوگیری از محو شدن سیگنال های برگشتی ) برای جلوگیری
به صورتPRFاز حالت خسوف و کسوف هدف ( از هدف نیاز است از چند متغیر به طور هم زمان استفاده کرد.
به طور همPRFمنظور این است که برای فائق آمدن بر این مشکالت از چند فاصلهPRFزمان استفاده کرد. به مشاهده موقعیت بین پالسی هدف در هر
حقیقی هدف نیز به دست می آید.
:FM- فاصله یابی 3-7 فاصله دارایPRF زیاد گاها در اثر افزایش PRFدر رادارهای پالس داپلر با
ابهام زیاد گردیده که برای حل آن باید در رادار از مدوالسیون فرکانس استفاده گردد. مدوالسیون فرکانس خطی و سینوسی هر دو برای این منظور
مناسب هستند لیکن مدوالسیون فرکانس خطی بیشتر مورد استفاده قرارمی گیرد.
زیادPRF خطی در ساده ترین شکل آن شامل ارسال یک FMفاصله یابی می گردد که شکل1است که به طور متناوب فرکانس آن مدوالسیون رمپ
زیر نمایانگر این مطلب است.
.ی 11 گردد می زیاد فرکانسش ثابت ضریب یک عنی80

81

سیگنال ارسال شده از نظر زمانی تأخیر داده می شود و همانطور که در شکل نشان داده شده است با تغییر فرکانس داپلر فرکانس آن نیز تغییر می
کند.
fd1 تغییرات محاسبه شده داپلر در طول نیمه غیر FM و fd2تفاوت فرکانس از سیکل اندازه گیری فاصاه است.FMمحاسبه شده در طول نیمه
توضیح : مدوالسیون فرکانس خطی برای یک مدت زمان حداقل چندین برابر زمان رفت و برگشت بیشتر هدف های با ارزش در فاصله ادامه پیدا می کند
در این مدت تفاوت نهایی آن ها بین فرکانس سیگنال های برگشتی ) دریافتی( و فرکانس فرستنده مقایسه می گردد.
در مدت نیمه دوم سیکل اندازه گیری فاصله ، فرکانس فرستنده ثابت می ماند و پس از یک دریافت کوتاه تفاوت بین سیگنال های دریافتی و ارسالی
دوباره محاسبه می گردد.
سیکل اندازه گیری فاصله فرکانس سیگنال تابعی ازFMدر طول نیمه غیر فرکانس سیگنال متناسب با جمع جبریFMسرعت هدف است. در نیمه
سرعت هدف و فاصله است. سیگنال های بازگشتی آشکار شده از هدف هایی کبا سرعت باال دارای تغییرات فرکانس باالتر و سیگنال های بازگشبی از
82

FMهدف های با فاصله بیشتر دارای تغییرات فرکانس کمتری در طول مود
هستند که فاصله از رابطه فوق محاسبه می گردد.
- رادارهای با فشردگی پالس:3-8Pulse compression radars
سیستم فشردگی پالس چیست؟
سیستمی است که یک پالس باریک با توان کم را به یک پالس وسیع مدولهشده قبل از تقویت و ارسال تبدیل می نماید.
منظور از روش کار رادار با فشردگی پالس چیست؟
در رادارهای پالسی برای تفکیک فاصله و دقت خوب به پالس باریک نیاز است در حالس که برای اجتناب از ابهام و احتمال آشکارسازی خوب از پالس
وسیع استفاده می گردد. منظور از روش کار رادار با فشردگی پالس این است که به هر دو هدف فوق ) به تفکیک فاصله و دقت خوب رادارهای پالس
کوتاه و توانایی آشکارسازی رادارهای با پالس وسیع ( دست یابیم.
توضیح این که در این گونه رادارها گیرنده به گونه ای طراحی شده است که می تواند پالس فشرده شده را به حالتmatch Filterبا سیستم فیلتر تطبیقی )
اول خود برگرداند و سیگنال را دریافت و پردازش نماید.
چگونه است؟puls compressionشکل موج ارسالی در سیم
در سیستم فشردگی پالس شکل موج ارسالی دارای پالسی با پهنای وسیع است که با مدوالسیون داخلی پالس پهنای موثر باند آن نیز گسترده می
گردد.
µ 1/12 می باشد که به طور معمول برابر Z/1به طور کلی عرض باند موثر
sec و زمانی که از پالس کامپرشن استفاده شود µ sec 1 است.0.5
انرژی موجود در پالس به چه عواملی بستگی دارد؟
83
به عرض پالس و توان ماکزیمم بستگی دارد.
توضیح:
( یا تفکیکی در فاصله )RR/10در رادارهایی که ایجاد دقت در فاصله ).1Range Resolution مورد نظر باشد پهنای پالس )Pw.باید محدود گردد
بنابریان انرژی مورد نیاز برای هر پالس با پیک توان بسیار زیاد حاصلمی گردد.
در رادارهای برد بلند امکان استفاده از پیک توان بسیار زیاد جهت.2 آشکارسازی اهداف با سطح مقطع راداری کم وجود ندارد. به علت این که خطر ایجاد ولتاژ شکست در عناصر تشکیل دهنده رادار وجود دارد.
در چنین رادارهایی انرژی مورد نیاز برای هر پالس با افزایش پهنایپالس حاصل می گردد.
در رادارهایی با فشردگی پالس استفاده وسیع به این معناست که انرژی.3 بسیار زیادی در هر پالس ایجاد می گردد و این عمل باعث بهبود احتمال
آشکارسازی می شود. در رادارهایCW و رادارهایی که دارای PRFباالیی هستند جهت به
روی موج ارسالی استفاده میFMدست آوردن فاصله از مدوالسیون شود.
:Puls Lompression Advantage- مزیت های فشردگی پالس 3-9استفاده بیشتر از توان متوسط موجود در فرستنده رادار-1اجتناب از خطرهای پیک باال در بخش های مختلف-2 کاهش آسیب پذیری سیستم در مقابل سیگنال های تداخلی که خواص-3
مشابهی با شکل موج فشرده شده ندارد. تقویت می شود.LPIسیستم به طرف خاصیت -4
دستیابی به یک پالس وسیع با استفاده از پالس باریک: ( امکانShort Palsدستیابی به یک پالس وسیع با استفاده از یک پالس باریک )
پذیر است. چون که پالس باریک شامل تعدادی زیاد مولفه های فرکانسی با رابطه ی فازی دقیق بین آن ها می باشد اگر این فازهای نسبی توسط یک
84

( ( تغییر یابد مولفه های فرکانسیMatch Filterفیلتر ) معموال فیلتر تطبیق با برای ایجاد یک پالس وسیع با یکدیگر ترکیب می گردند این همان پالس
وسیعی است که ارسال گردیده.
.هرچه پالس کوتاه تر باشد تغییرات داپلر کمتر است
- کاربردهای پالس باریک در رادار:3-10 رادارهای متداول با پالس باریک ممکن است برای اهداف زیر مورد توجه
قرار گیرند:
Range Resolutionتفکیک در فاصله (1
Range Accuracyدقت در فاصله (2
Clutter Reductionکاهش کالتر (3
کاهش تابش یا(4انعکاس
Glint Reduction
Multi Path Resolutionتفکیک چند مسیره(5
Minimum Rangeحداقل فاصله(6
Doupller Toleranceتغییرات مجاز داپلر(7
تفکیک در فاصله: معموال تفکیک هدف های در مختصات فاصله ساده تر از تفکیک آن ها در زاویه است. تفکیک فاصله تابعی از پهنای پالس رادار می
باشد.
RR= PW ×C
2 RR (km) = 0.15 × pw µ sec
RR (N mail) =0.81 × pw µ sec
را بهبود بخشیدRange Resolutionبا استفاده از تکنیک فشردگی پالس می توان اما نمی توان حداقل فاصله را تغییر داد.
85

دقت در فاصله:اگر یک رادار دارای قابلیت خوبی برای تفکیک در فاصله باشدقابلیت دقت اندازه گیری فاصله آن نیز خوب خواهد بود.
RAC= RR/10
کاهش کالتر: یک پالس کوتاه با کاهش کالتر موجود در سلول تفکیک نسبت به(S/Nسیگنال به کالتر را افزایش می دهد. )
کاهش تاش یا انعکاس: در رادار های ردیاب خطاهای فاصله و زاویه که بر اثر اندازه ی محدود هدف به وجود آمده است با افزایش تفکیک فاصله کاهش
داده می شود. ) چون این امر باعث تشخیص مرکز پراکنده کننده می گردد(
تفکیک چند مسیره: با تفکیک فاصله ی مناسب سیگنال های دلخواه از هدف از سیگنال های برگشتی که به واسطه ی پراکندگی از مسیرهای دورتر یا چند
مسیره به گیرنده می رسند جداسازی می گردد.
حداقل فاصله: یک پالس باریک باعث می گردد تا رادار با حداقل فاصله ی با یک پالس باریک تغییرات فرکانس داپلر درRmin (km)= 15 pwکوتاه تری کار کند
مقایسه با پهنای باند گیرنده کم خواهد بود در نتیجه یک فیلتر تطبیق برایآشکارسازی مورد نیاز می باشد.
- محدودیت های یک رادار پالس کوتاه:3-11B = 1/Zاین نوع رادارها نیاز به پهنای باند وسیع دارند بر اساس رابطه .1
اگر پیک توان فرستنده محدود باشد انرژی ارسالی کم خواهد بود. .2Pt=PP × PW
در نتیجه این گونه رادارها از نظر فاله قابل کشف محدود می باشند.
- عوامل موثر در انتخاب سیستم فشردگی پالس:3-12نوع شکل موج انتخاب شده:ا.پوشش در فاصله ) برد(.1پوشش داپلر.2گستره سطح لوپ فرعی.3قابلیت انعطاف شکل موج.4
86

حذف سیگنال های تداخلی .5(SNRنسبت سیگنال به نویز).6
روش تولید و پردازشب. روش کار با تکنیک های فعال و غیر فعال استفاده شده در تولید وج.
پردازش
- روش فعال در تولید شکل موج:3-13 روش فعال در تولید شکل موج عبارت است از انجام مدوالسیون فاز یا
فرکانس بر روی موج حامل بدون این که زمان حقیقی طوالنی تر گردد که ( میVcoیک نمونه از این روش مدوالسیون به وسیله کنترل ولتاژ نوسان )
باشد.
- تکنیک های فشردگی پالس:3-14I. فشردگی پالسFM( خطی کوتاه Liner Puls Compression Chirp: )
این تکنیک قدیمی ترین و بهترین نوع شناخته شده فشردگی پالس است که خطی کوتاه به سادگی قابل تولید است. در این نوع شکل موجFMشکل موج
87

( به تغییرات داپلر نسبتا غیرSNRپالس فشرده شده و نسبت سیگنال به نویز )حساس است.
بلوک دیاگرام یک رادار که از فشردگی پالس خطی استفاده می کند:
( گردیده و گیرنده دارایFMدر این نوع رادار فرستنده مدوالسیون فرکانس ) ( است.Match Filterفیلتر فشردگی پالس می باشد که این همان فیلتر تطبیق )
T و زمان Aشکل موج ارسالی یک پالس چهارگوش )مربعی( با دامنه ثابت
تشکیل گردیده که مراحل انجام مدوالسیون در شکل زیر مشخص شدهاست:
88

89
در زمان دریافت یا گیرندگی سیگنال برگشتی یا مدوالسیون فرکانس از یک فیلتر فشردگی پالس عبور می کند این فیلتر به گونه ای طراحی شده است
که سرعت انتشار امواج در آن با فرکانس نسبت مستقیم دارد. اگر فیلتر باشد که آن را میDispersive D.Lفشردگی پالس از نوع خط تأخیر مجزا کننده
توان بر اساس سرعت بخشیدن به موج به فرکانس های باالتر در قسمت پایین روی پالس نسبت به فرکانس های پایین تر در قسمت باال رونده ی
فشرده نماید که در آنB/1پالس بیان نمود به طوری که پالس را با پهنای 90

B=f2 – f1 باشد. زمانی که فیلتر فشردگی پالس از نوع Match Filterباشد تابع خروجی آن بدون در نظر گرفتن نویز متناسب با تابع زیر است.
sin πBtπθ .t
( :Passive Fm Linr Device خطی )FM- وسایل غیر فعال 3-15 خطیFMدو گروه از وسایل غیر فعال که در تولید و پردازش شکل موج
مورد استفاده قرار می گیرند عبارت است از :
وسایل ماوراء صوت: که در آن ها سیگنال های الکترومغناطیسیأ. ورودی ابتدا به سیگنال های امواج صوتی تبدیل می شوند و در محیطی با سرعت صوت انتشار می یابند و سپس مجددا در خروجی به سیگنال
الکترومغناطیسی تبدیل می گردند. Dispressiveوسایل الکترومغناطیسی: که از مشخصه مجزا کننده )ب.
Charectrics.از یک شبکه استفاده می نمایند ) اهداف اساسی در طراحی یک وسیله ی غیر فعال یا فعال در تولید و پردازش
FM:خطی چیست
اهداف اساسی برای این منظور عبارت است از :
Bمشخصه دامنه ی یکسان به طول پهنای باند (1
B به طول پهنای باند Zشیب تأخیر خطی با تأخیر دیفرانسیل (2
دستیابی به حداقل پاسخ های نادرست و حداقل اعوجاج و همچنین(3دستیابی به لوپ های فرعی کوچک
افت ورودی کم باشد(4 محدودیت های اساسی در استفاده از وسایل ماوراء صوت در تولید و
خطی چیست؟FMپردازش شکل موج
این محدودیت آن است که مبدل های مورد نیاز برای اتصال الکتریکی یا الکترومغناطیسی در محیط صوتی مبدل های خوبی برای انرژی نیستند
بنابراین باعث افت بسیار زیاد می گردند.91

FMمتداول ترین نوع وسایل ماوراء صوت جهت تولید و پردازش شکل موج
خطی چیست؟
خط تأخیر استریپ -1خط تأخیر انکسار عمودی -2خط تأخیر امواج سطحی-3خط تأخیر گوه ای-4کریستال های پیک-5
خطی به کار میFM خطی که در تولید و پردازش شکل موج FM وسایل (activeروند کدامند؟ )
Voltage Controlنوسان سازی که به وسیله ولتاژ کنترل می شود).1
Osilator)مدوالتور سراسوئید.2تولید کننده شکل موج خط تأخیر.3 خطی ترکیب شده با شکل موج های دیگرFMتولید کننده .4
( :V.C.Oنوسان ساز با کنترل ولتاژ )3-15-1 این سیستم نوسان سازی است که در آن فرکانس بر مبنای ولتاژ اعمال
شده تغییر می نماید . به طور ایده آل فرکانس تابع خطی ولتاژ اعمال% دارند.1شده است لیکن اکثر این وسایل خطایی حدود
اعمالvco( به یک liner voltage rampاگر یک ولتاژ رمپ با شیب خطی ) خطی تولید می گردد. FMگردد شکل موج
خطی هستند:FMشکل های زیر تکنیک های فعال در تولید سیگنال
92

مدوالتور سرا سوئید:-3-15-2 گوش تولید می گردد و با یک موج دندان4در این مدوالتور یک شکل موج
اره ای متناوب برای ایجاد یک پالس با تغییرات فاصله فشرده می گردد. � خطی را به وجود می آورندFMاین پالس های فشرده شده شکل موج
سپس سیگنال از یک چند برابر کننده فرکانس برای ایجاد انحراففرکانس مناسب عبور داده می شود.
( مرجع ، برای تولید شکل موجTrain Pulsتوضیح این که: یک قطار پالس ) دندان اره ای مورد استفاده قرار می گیرند بنابراین شکل موج خروجی
93

هم فاز با این پالس ها خواهد بود. بلوک دیاگرام این سیستم به صورتزیر است:
تولید کننده شکل موج مورد نظر با خط تأخیر:-3-15-3 این وسیله شبیه مدوالتور تشریح شده فوق است جز این که تغییر فاز می
درجه افزایش یابد.360تواند تا
(Delay Lineدر این سیستم یک قطار پالس با فواصل یکسان به خط تأخیر ) اعمال می گردد. طول خط تأخیر برابر با فاصله بین پالس ها است و
نقاط خروجی آن نیز دارای فواصل یکسان می باشد سیگنال خروجی در ( متناوبا گیت گردیده و پس از فیلتر شدن شکل موجTPSنقاط خروجی )
خروجی را می سازد.
94
Synthesize خطی ترکیب شده : )FMتولید کننده -3-15-4Liner Fm Generator)
این وسیله با ترکیب شکل موج پله ای و شکل موج دندان اره ای شکل خطی تولید می کند.FMموج
فرکانس های جانبی توسط فرکانس موج مرجع با تقسیم بندی دودویی )باینری( تولید می گردند و این فرکانس ها به یک مخلوط کننده ی
( با جمع کننده ی فرکانس به نوبت در طول پالسMatrix Filterماتریکس ) مورد نظر اعمال می گردند سرانجام خروجی مخلوط کننده یک فرکانس
پله ای خواهد بود. این شکل موج با فرکانس دندان اره ای مخلوط گردیده خطی را ایجاد می نماید.FMو شکل موج
II. فشردگی پالسFM( غیر خطی Non Liner Fm Pulls Compression: ) برای ایجاد طیف دامه ی دلخواهFMاز آن جایی که شکل موج مدوالسیون
غیر خطی به وزن دهی زمان یا فرکانس )FMطراحی شده است. شکل موج Time – Frequency Weightingبرای حذف لوپ فرعی نیازی ندارند و گیرندگی )
( و لوپ های فرعی کوچک با این طرح سازگاریMatch Filterفیلتر تطبیق ) ( مربوط به وزن دهی توسطSnrدارند. بنابراین افت نسبت سیگنال به نویز )
قرینه ای )FMتکنیک های غیر تطبیق حذف می گردد. اگر یک مدوالسیون 95

Symmetrical( با وزن دهی زمان )Time –Weightingبرای کاهش لوب های فرعی ) غیر خطی یک تابع غیر ابهامFMفرکانس مورد استفاده قرار گیرد شکل موج
(Unambing Funtion.نزدیک به ایده آل خواهیم داشت )
یک شکل موج قرینه ای دارای فرکانسی است که نسبت به زمان در طولاولین نیمه پالس افزایش یا کاهش و در طول نیمه دوم کاهش می یابد.
توضیح این که: برای دستیابی به یک شکل موج غیر قرینه ای باید از نصفموج قرینه استفاده کرد.
غیر خطی:FMمحدودیت های شکل -3-16پیچیدگی بیشتر-1محدودیت وسایل تولید کننده-2 برای دستیابی به سطح لوب فرعی مورد نیاز به طرح مدوالسیون-3
جداگانه ای برای هر طیف دامنه مورد نیاز است. ( منحنی تابع ابهام درsharpnessتوضیح: به خاطر دقیق بودن ) نیز بودن یا
غیر خطی مفیدترین نوعFMصورتی که فاصله داپلر معلوم باشد شکل موج در سیستم ردیابی است.
96
III.( فشردگی پالس با فاز کد شدهPhase – Code Puls Compression: ) در این نوع فشردگی پالس رادار یک پالس وسیع را که از پالس های باریک
( و فرکانس یکسان با فاز متفاوت تشکیلdurationمتوالی با زمان پالس )گردیده می فرستد.
97

Delayاین نوع شکل موج ممکن است با اعمال یک پالس باریک به خط تأخیر )
Line 13( که بای مثال( نقطه ی خروجی Tapsبا فاصله هایی برابر پهنای ) پالس باریک هستند تولید گردد. این نمونه در شکل زیر مشاهده می گردد.
مدارهای تغییر فاز قرار گیرفته اند و یکDelay Lineتوضیح: بین نقاط خروجی خط متداول خروجی برای تولید پالس مدوله شده با فاز زیاد مورد استفاده
یا بدون تغییرTapsقرار گرفته است در عمل سیگنال خروجی در هر نقطه درجه به روش باینری180 رادیان ( π ( یا تغییر فاز به اندازه ) 0°فاز )
خواهد بود.
نقطه13( را با Puls Duration مشابهی زمان پالس ) Delay Lineدر گیرنده Reverse Phase تغییر دهنده ی فاز 13ورودی با فاصله پیکان تطبیق داده و
Changeباعث می گردند تا پالس های باریک متوالی برای ایجاد یک پالس وسیع در خروجی حاصل نماید مانند شکل زیر
98

در شکل زیر سیگنال با فاز کد شده ی باینری مشاهده می گردد.
باید توجه داشت که تأخیر زمانی داده شده در پالس های در گیرنده ب عکستأخیرر زمانی داده شده با پالس ها در فرستنده است.
ممکن است یک خط تأخیر مشابه برای ارسال و دریافت مورد استفاده قرار گیرد بدین صورت که سیگنال ورودی به نقطه مقابل اعمال و تغییر دهنده
99

های فاز برای دریافت در حالت معکوس قرار گیرند. شکل زیر مثالی از شکلموج فشردگی پالس با فاز کد شده را نشان می دهد:
پالس باریک تشکیل13 از aپالس وسیع ارسال شده در شکل زیردر شکل خروجیb خواهد بود در تصویر 00000ππ00π0π0گردیده کا فاز آن ها به صورت
مربوط از فیبتر فشردگی پالس در گیرنده نشان داده شده است.
)فیلتر تطبیق یافته فشردگی پالس( در گیرندهmatch filterتوضیح این که: شکل موج دیافت شده را با مدوالسیون ارسال شده مرتب می نماید.
پالس های باریک شده در فیلتر تطبیق به گونه اس تلفیق می گردند کهخروجی شامل پیک های کوچک اضافی در طرفین پیک اصلی باشد.
( :Barker Codeکد بارکر )
کدهای بارکر نوعی از کدهای باینری هستند که غالبا در رادار مورد استفاده قرار می گیرند چون این کدها دارای لوپ های فرعی کوچکی هستند ) البته در مقایسه با کدهای اصلی باینری ( یک نسبت شناخته شده از کدهای بارکر
100
خالصه شده ی فازهای–در جدول زیر نشان داده شده است که عالمت + و می توانند برعکس شوند بع– هستند باید توجه داشت که عالمت + و π و 0
عنوان مثال عالمت ) - + + ( می تواند به صورت ) + - - ( تغییر یابد و به آن ها نیز معکوس گردد.digitsترتیب اعداد
هرچه تعداد بیت ها بیشتر باشد لوب های فرعی ضعیف تر یا به عبارتی کمتر خواهد بود.
Peak side lob (db)Code element
-6 db
-2.5 db
-12.1 db
-14 db
-147 db
-20.3 db
-22.3 db
++ - +
- ++
- +++ + - ++
+ - +++
- + - - +++
- + - - + - - - +++
- + - + - ++ - - ++++ - - +
2
3
4
5
7
11
13
فصل چهارمرادارهای ردیاب
101

( :Tracling Radars- رادارهای ردیاب )4-1 یک سیستم رادار ردیاب با اندازه گیری مختصات هدف اطالعاتی را فراهم
می آورد که به وسیله ی این اطالعات می توان مسیر و موقعیت بعدی هدفرا پیش بینی کرد.
) همه یا قسمتی از این اطالعات راداری که در دسترس قرار می گیرد مانند فاصله ، زاویه سمت ، زاویه ارتفاع و تغییر فرکانس ممکن است جهت پیش
بینی موقعیت بعدی هدف مورد استفاده قرار گیرد.(
- چگونگی عملکرد یک رادار ردیاب:4-2 انواع بسیار زیادی از رادارهای ردیاب وجود دارند که بعضی از آن ها عمل
( و ردیابی را به طور هم زمان انمجام می دهند و نوعی ازsearchجست و جو ) ( بوده و بر روی یکpencil beamرادارهای ردیاب هستند که دارای بیم مدادی )
سکوی چرخنده قرار دارد و برای تعقیب هدف موتورهایی زاویه سمت وزاویه ارتفاع آن را تغییر می دهند.
( و تصحیح موقعیت آنتن و قرار دادن هدفEcho)با تشخیص زاویه ی دریافت )در مرکز بیم خطاهای جهتی هدف را تعیین می کند(
- کاربردهای اساسی رادارهای ردیاب:4-3کنترل اسلحه-1
در این حالت زاویه سمت ، زاویه ارتفاع و فاصله هدف توسط رادار ردیاب اندازه گیری و نرخ تغییرات این پارمترها تعیین کننده ی بردار سرعت و
موقعیت بعدی هدف بوده و این اطالعات باعث می گردد که مسیر موشکو موقعیت بعدی آن مورد استفاده قرار می گیرد.
تنظیم کننده ی برد موشک-2توضیح:
رادار ردیاب قبل از عمل ردیابی باید هدف خود را پیدا کند بعضی از رادارها عمل جست و جو را برای پیدا کردن هدف قبل از عمل ردیابی
انجام می دهند.102

اگر یک رادار هر دو عمل ) جست و جو و ردیابی ( را انجام دهد دارای محدودیت هایی خواهد بود زیرا اگر در وضعیت ردیابی باشد اطالعاتی
از دیگر هدف های بالقوه نخواهد داشت.
- چگونگی دستیابی به مختصات هدف و عمل پردازش :4-4 ( عمل اسکن را روی هدفFan Beamیک رادار جست و جو گر با بیم باد بزنی )
انجام می دهد. با این عمل اسکن روی هدف دستیابی به مختصات هدف امکان پذیر می گردد.) اگر تغییرات مختصات هدف از یک اسکن به اسکن
دیگر زیاد نباشد و همچنین تعداد هدف ها کم باشد عمل پردازش توسط امکان پذیر می باشد.PPI هدف بر روی Bleapاپراتور با عالمت گذاری روی
در غیر این صورت عمل پردازش و دست یابی به اطالعات ردیابی توسطکامپیوتر به صورت اتوماتیک انجام می گیرد.(
عمل ردیابی توسط رادار در کاربردهای مختلف به چند گروه اصلی طبقهبندی می گردد؟
گروه اصلی طبقه بندی می گردد:2این عمل به
STT(/ Single Target Trackingردیابی یک هدف منفرد).1
MTT(/ Multiple Target Trackingردیابی چند هدف ) .2
چیست و چه کاربردی دارد؟STTعمل ردیابی
STTبه عمل ردیابی یک هدف یا بک گروه هدف با اختالف زاویه کم اتالق می گردد.
کنترل آتش ضد هوایی است. که نخست بر روی توپSTTیکی از کابردهای عبارتSTTها و سپس بر روی موشک ها استفاده گردید و کاربردهای دیگر
است از رادارهای هدایت ، رادارهای ردیاب ، ماهواره ، رادارهای کمک ناوبرو ... .
چیست؟MTT عمل ردیابی
103
صورت2 ( بوده و به Multiple Targetاین نوع عمل ردیابی برای چند هدف ) انجام می پذیرد.
Track while scanردیابی حین اسکن .1
Phase arrey trackingاسکن الکترونیکی آنتن .2
( چگونه انجام می شود و کیفیت آن به چهTWSردیابی حین اسکن )ا.عواملی بستگی دارد؟
ردیابی حین اسکن ردیابی بک هدف با استفاده از موقعیت های )مختصات( اندازه گیری شده در هر اسکن توسط رادار مراقبت امکان پذیر می باشد
و کیفیت آن به عوامل زیر بستگی دارد:
زمان بین مشاهدات )هرچه کمتر باشد بهتر است(-1دقت در تغییر موقعیت هدف-2 تعداد هدف های غیر واقعی که ممکن است در مجاورت هدف در حال-3
ردیابی ظاهر گردد.اسکن الکتونیکی آنتن:ب.
رادارهای آرایه فازی بر دو نوع هستند:
104

Planer liner arraySloter liner array
X( و سرعت آن )X چیست؟ و در آن موقعیت فعلی هدف) ß و αردیابی °) چگونه محاسبه می گردد؟
105
TX TX

( باید بر اساس آشکارسازی های قبلیTWSیک رادار ردیاب حین اسکن ) برآورد پیوسته ای از موقعیت و سرعت فعلی هدف نظیر موقعیت و سرعت
وG یا ß و αقبلی آن داشته باشد که یک روش برای محاسبه اطالعات ردیابی H ()است که موقعیت فعلی هدف X )و سرعت آن X )با روابط زیر محاسبه°
می شود:
(X n) = XPn+ α ( Xn - XPn)
(X °n) = X°n-1 + ß/ TS (Xn - XPn)
Xn مویعیت اندازه گیری شده در : nامین اسکن
αپامتر هموار نمودن یا پیوسته نمودن موقعیت هدف :
ßپامتر هموار نمودن سرعت :
TSزمان بین مشاهدات :
توضیح:
چیست؟STT نسبت به TWSبرتری -1 آن است که در این ردیابی چندین هدف به طورSTT نسبت به TWSبرتری
هم زمان ردیابی می گردند.
چیست؟TWS نسبت به STTبرتری -2 آن است که در این نوع ردیابی دستیابی بهTWS نسبت به STTبرتری
دقت بسیار باال به طور دائم امکان پذیر است.
- اسکن الکترونیکی چیست؟4-5 در این نوع اسکن رادار قارد است بیم آنتن خود را در هر نقطه از فضا با
سرعت زیاد منتقل نماید.
در این نوع اسکن رادار قارد است چند هدف را هم زمان تعقیب نموده وموشک به طرف آن ها هدایت نماید.
106

بردش می باشد.1/3حداکثر ارتفاعی که یک موشک می تواند بزند برابر بر موشک باشد.3رادار سرچ حداکثر بردش باید برابر برد موشک باشد.2رادار تعقیب هدف باید
- اسکن و انواع آن:4-6 ( را در فضا برای جست و جو یا ردیابیBeamتعریف: چرخش آنتن یا پرتو )هدف عمل اسکن می نامند.
- مدت زمان اسکن:4-7 مدت زمانی که آنتن رادار ) پرتو یا بیم آنتن ( یک سیکل کامل چرخض انجام
دهد زمان اسکن می نامند.
انواع اسکن:
انواع اسکن به شرح زیر است:
اسکن دورانی ا.اسکن قطاعیب.اسکن مخروطی ج.اسکن مارپیچی د.اسکن حلزونیه.اسکن خطیو.اسکن پالمرز.اسکن حین ردیابیح.اسکن لوپ سوئیچط.
( به طور متوالی حولbeamاسکن دورانی: در این نوع اسکن آنتن یا پرتو ) درجه به چرخش در می آید.360محور عمودی
معموال این گونه اند.Early Warningرادارهای
اسکن قطاعی: حرکت آنتن یا بیم در بخشی از فضا بین دو زاویه ی معلوم درجهت افقی یا عمودی اسکن قطاعی نامیده می شود.
107

اسکن قطایی افقی بیشتر در رادارهای ناوبری هواپیما و اسکن قطایی عمودی بیشتر در رادارهای ارتفاع یاب .
اسکن مخروطی: در این نوع اسکن پرتو یا همان بیم رادار در خراج از محور مرکزی ، حول یکی از محورهای جانبی به چرخش در آمده و در فضا یک
مخروط بزرگ ایجاد می کند.
( به سمت باال درReflectorاسکن مارپیچی: در این نوع اسکن رفلکتور آنتن ) جهت عمودی متمایل می گردد و به طور کلی می توان گفت که این نوع
اسکن رکیبی از اسکن دورانی و اسکن قطاعی عمودی می باشد که ( با استفاده ازPencil Beamرادارهای کنترل آتش که دارای بیم باریک هستند )
این نوع اسکن بخش بزرگی از فضا را مورد کاوش قرار می دهند.
اسکن حلزونی: نوعی از اسکن مخروطی است که قطر دوران آن در حیناسکن ) دوران ( افزایش می یابد.
این نوع اسکن عموما در رادارهای جست و جوگر در هواپیما مورد استفادهقرار می گیرند.
(:Raster Scan- اسکن خطی)4-8
همانند اسکن تلویزیون پرتو رادار با سرعت زیاد در جهت افقی در فضا حرکت کرده و ارتفاع خود را در حین اسکن ) حرکت ( تغییر می دهد در
حقیقت این نوع اسکن ترکیبی از اسکن قطاع عمودی و قطاع افقی است.
108

( با هر یکConical Scanاسکن پالمر: این اسکن ترکیبی از اسکن مخروطی ) پالمر دورانی.–از انواع اسکن های دیگر است/ پالمر خطی
اسکن حین ردیابی: در این نوع اسکن دو پرتو )بیم( آنتن رادار به طور هم زمان با فرکانس های متفاوت ، یکی در جهت عمودی و دیگری در جهت افقی
حرکت نموده و عمل کاوش را انجام می دهند.
اسکن لوپ سوئیچینگ ) البینگ متوالی بیم( :
شکل بیم آنتن در رادارهای ردیاب یک بیم مدادی متقارن است که در آنپهنای بیم از نظر ارتفاع و سمت دقیقا یکسان است.
در این رادارها تفاوت بین موقعیت هدف و جهت مرجع ) که معموال محور ( نامیده می شود و رادار ردیابAngular Errorآنتن است( خطای زاویه ای )
سعی می کند آنتن خود را در موقعیتی قرار دهد تا خطای زاویه ای صفر گردد و زمانی که این خطا صفر گردد هدف هم سو با جهت مرجع قرار گرفته
است.
109

یک روش برای به دست آوردن جهت و بزرگی خطای زاویه ای در یک مختصات سوئیچ کردن متناوب بیم آنتن بین دو نقطه است. این روش سوئیچ
کردن را لوپ سوئیچینگ ) البینگ متوالی بیم ( می نامند.
عمل البینگ بیم ) ایجاد دو موقعیت برای بیم ( در بعضی از رادارها از عناصرچرخنده استفاده شده که در این صورت فاز بیم ها سوئیچ می شود.
برای تشخیص خطای زاویه ای و اصالح آن در این راداها اپراتور از یک استفاده نموده که سیگنال های برگشتی ویدئویی از دوAاسکوپ نوع
موقعیت بیم را در روی اسکوپ پهلوی هم قرار می دهد.
وقتی هدف روی محور بود دو پالس روی اسکوپ دارای دامنه یکسان می باشند . چنانچه هدف خارج از محور باشد دامنه دو پالس نامساوی می باشند
که در یان صورت اپراتور وجود خطا و جهت آن را مشاهده و برای ایجادتوازن مجدد بین دو موقعیت بیم موقعیت آنتن را تغییر می دهد.
110

نتیجه این که اختالف دامنه بین سیگنال های حاصل از دو موقعیت سوئیچ شده بیم معیاری برای اندازه گیری جا به جایی هدف از محور است. این
اختالف دامنه نمایانگر جهتی است که آنتن برای هم سویی محور خود با جهت هدف باید حرکت نماید زمانی که این دامنه ها برابر شدن هدف بر روی محور
بیم قرار گرفته است و موقعیت آن مشخص می گردد.
موقعیت سوئیچینگ4برای دستیابی به خطای زاویه ای در مختصات قائم به بیم آنتن نیاز می باشد.
(Fed horn فیدهورن )4 بعدی با سوئیچ کردن متوالی دارای 2بنابراین یک رادار Right & Leftو با یک آنتن می باشد به طوری که قطاع های چپ و راست )
Sector( و باال و پایین )Up & Down Sectorبا موقعیت های پشت سر هم آنتن ) پوشیده می شود و در هر موقعیت ارسال و دریافت انجام می گیرد.
111

فیدهون نیز ممکن است جهت منظور فوق به کار گرفته5یک مجموعه با تای دیگر برای4شود به طوری که فیرهورن وسط جهت ارسال موج و
دریافت مورد استفاده قرار گیرد.
( :Conical Scan- اسکن مخروطی )4-9 اسکن مخروطی عبارت است از چرخاندن دائمی یک بیم آنتن خارج از محور
آنتن ) حول یکی از محورهای جانبی (
(Sequential Angelزاویه بین محور چرخش و محور بیم آنتن زاویه ی میل ) نامیده می شود. اسکن نمودن دائمی بیم با حرکت مکانیکی فیدهورن آنتن
انجام می گیرد. فیدهورن به طور مخصوصی در یک مسیر دایره ای شکل در اطراف نقطه ی کانونی می چرخد و باعث حرکت بیم آنتن در یک مسیر دایره
ای شکل در اطراف هدف می گردد.
( در فرکانسی برابر فرکانس چرخش بیم آنتن مدولهEchoسیگنال برگشتی ) می گردد. دامنه این مدوالسیون بستگی به شکل بیم ، زاویه ی میل و زاویه
ی بین خط دید هدف ) محور هدف ( و محور چرخش دارد. فاز مدوالسیونبستگی به زاویه ی بین هدف و محور چرخش دارد.
112

مدوالسیون اسکن مخروطی از سیگنال برگشتی جدا شده ) دی مدوالسیون( که به طور دائم آنتن را روی هدف قرار می دهدServoو به سیستم کنترل
اعمال می گردد.
جداگانه مورد نیاز می باشد چون مسألهServoباید توجه داشت که دو سیستم ردیابی دو بعدی است ) یکی ردیابی سمت و دیگری ردیابی ارتفاع( . باید توجه داشت که موقعی که آنتن بر بروی هدف قرار گیرد خط دید هدف و
محور چرخش بر یکدیگر منطبق و مدوالسیون اسکن مخروطی صفر خواهدشد.
در این نوع رادار انتن به گونه ای نصب گردیده که قارد است به وسیله ی موتورهای جداگانه ی الکتریکی با هیدرولیکی در موقعیت های افقی یا عمودی
قرار گیرد.
( باparabolicیکی از ساده ترین آنتن های اسکن مخروطی یک سهمی )فیدهورن خارج از محور چرخنده یعنی در حول محور منعکس کننده است.
توجه: همان موتورهایی که باعث چرخش بیم آنتن اسکن مخروطی می گردد درجه با هم اختالف فاز دارند را نیز90 خروجی که 2مولد مرجع دو فاز با
می چرخانند. این دو خروجی به صورت مرجع برای استخراج خطاهای افقی وعمودی مورد استفاده قرار می گیرند.
است یکی عمل چرخشRotory – Joint عدد 2توجه : این سیستم های راداری ( را انجام می دهدnoddingدر جهت افقی و دیگری عمل حرکت در عمودی )
انرژی به وسیله آن ها از فرستنده به آنتن هدایت می شود.
عمل ردیابی خطای زاویه ای )دی مدوالسیون خطا( توسط یک جفت آشکارساز فاز که ورودی مرجع آن ها توسط موتور اسکن تأمین می گردد
انجام می گیرد.
در این آشکارسازها که آشکارسازهای حساس به فاز هستند سیگنال خطا بایک سیگنال مرجع افقی و عمودی مقایسه می گردد.
113
یک آشکار ساز فاز وسیله ای غیر خطی است. به طوری که سیگنال ورودی و سیگنال مرجع در آن که دارای فرکانس برابر هستند با یکدیگر مقایسه می
درجه تغییر180گردند و سیگنال خروجی آن ها با تغییر فاز سیگنال ورودی تا عالمت می دهد و دامنه ی خروجی آشکارساز خطای زاویه ای متناسب با
میزان خطاست و عالمت آن نشان دهنده ی جهت خطا می باشد. خروجیویدئویی این رادار شامل خطای ردیابی زاویه ای به صورت سیگنال پوش )
envelop.در باالی پالس است که در شکل زیر مشاهده می گردد )
توضیح:
برای اندازه گیری خطای زاویه ای در مختصات قائم ) افقی و عمودی ( در پالس برای3 تکنیک اسکن البینگ متوالی و اسکن مخروطی حداقل به 2هر
پالس برای4آشکارسازی نیاز است و در عمل برای البینگ متوالی حداقل یک ربع مختصات مورد نیاز است.
114
( :mono puls tracking radar- رادار ردیاب تک پالس )4-10 همان طوری که بیان گردید رادارهای ردیاب در حالت اسکن مخروطی و
البینگ به تعداد حداقلی پالس برای استخراج خطای زاویه ای نیاز دارند. اگر در یک سیستم راداری ، اندازه گیری خطای زاویه ای ) تغییرات زاویه(بجای چندین پالس بر مبنای یک پالس انجام گیرد آن را رادار ردیاب تک پالس می
نامند که در این حالت تغییرات دامنه پالس به پالس سیگنال برگشتی برردیابی اثر نخواهد گذاشت.
روش های متعددی وجود دارد که در آن ها اطالعات خطای زاویه ای فقط با یک تک پالس به دست می آید. در این روش ها بیشتر از یک بیم آنتن به طور هم زمان مورد استفاده قرار می گیرد. زاویه ی دریافت سیگنال برگشتی در یک سیستم تک پالس با محاسبه ی پالس یا دامنه ی نسبی آن ها در هر بیم تعیین می گردد. بنابراین ردیابی البینگ هم زمان ) تک پالس( به تکنیک هایی
اطالق می گردد که اطالعات خطای زاویه ای را بر مبنای یک تک پالساستخراج نماید.
تکنیک تک پالس همچنین دارای قابلیت اندازه گیری زاویه با دقت زیاد است چون فیدهورن آن ثابت و بدون هیچ بخش متحرکی بر روی آنتن نصب گردیده
است این حالت توان راداهای ردیاب بیم مدادی را با دقت ردیابی زاویه ای درجه امکان پذیر گردانیده است.3000
- انواع رادارهای ردیاب تک پالس:4-11 Amplitude Comparison mono pulsرادار ردیباب تک پالس مقایسه گر دامنه -1
tracking radar
phase comparison mono puls trackingرادار ردیاب تک پالس مقایسه گر فاز -2
radar
رادار ردیاب تک پالس مقایسه گر دامنه:
بیم2این رادار برای اندازه گیری خطای زاویه ای در مختصات تک بعدی از آنتن که با هم همپوشانی داشته باشند استفاده می کند و برای محاسبه ی
reflector بعدی از یک آنتن که دارای یک 2خطای زاویه ای در مختصات
115

( است استفاده می کنند . از دو بیم کهfid horn فیدهورن )4)منعکس کننده( و همپوشانی دارند از مجموعشان برای به دست آوردن بیم فرستنده استفاده
می شود و از تفاضل و مجموعشان برای محاسبه ی خطای زاویه ای درگیرنده استفاده می گردد.
شکل زیر همپوشانی مجموع و تفاضل بیم ها را نشان می دهد:
همپوشانی بیم هاaشکل
مجموع بیم هاbشکل
تفاضل بیم هاcشکل
محاسبه ی خطای زاویه ایdشکل
بیم به دست آمده جهت اندازه گیری2سیگنال دریافت شده که از تفاضل خطای زاویه ای به کار می رود.
116

بیم حاصل شده است هم برای محاسبه2سیگنال دریافت شده که از مجموع ی فاصله به کار می رود و هم به عنوان سیگنال مرجع جهت مشخص نمودن عالمت اندازه ی خطای زاویه ای به کار می رود. سیگنال های دریافت شده
از مجموع و تفاضل بیم ها جداگانه تقویت می شوند و در آشکارساز فاز با هم ترکیب گردیده تا اندازه و عالمت سیگنال خطای زاویه ای را مشخص نمایند
نمایش داده می شوند.Δ و سیگنال های تفاضل با Σسیگنال های مجموع با
-بلوک دیاگرام یک رادار ردیاب تک پالس مقایسه گر دامنه ی4-12یک بعدی:
بعدی2رادارهای ردیاب تک پالس مقایسه گر دامنه که هدف را در مختصات بیم منحرف4 فیدهورن می باشد که 4ردیابی می کنند دارای یک رفلکتور و
شده از محور تولید و پس از تولید و تبدیل آن ها به مجموع و تفاضل آن ها راپردازش می نمایند.
117

( در اطراف محور منعکس کنندهSymmetricalفیدهورن ها به صورت متقارن ) قرار گرفته اند و برای ایجاد یک بیم مدادی بر روی محور به طور هم فاز
موسومند و درΣتوسط فرستنده تغذیه می شوند. این بیم ها به بیم مجموع گیرنده برای آشکارسازی هدف و ردیابی فاصله و به دست آوردن داپلر و به عنوان سیگنال مرجع در آشکارساز خطای زاویه ای مورد استفاده قرار می
گیرند.
در این رادارها مجموعه ی فیدهورن های آنتن یک کانال مجموع و دو کانالتفاضل را تشکیل می دهند که نحوه ی عملکرد آن ها به صورت زیر است:
باشد در حالتیAS . Cos ωIF .t گیرنده به صورت IFاگر سیگنال مجموع در بخش ( باشد توضیح این که مثبت یا منفی بودنAS> 0 , Ad> 0که سیگنال تفاضل )
آن ها به این بستگی دارد که هدف در کدام طرف محور مرکزی )محور آنتن ( قرار گرفته باشد بنابراین برای تعیین عالمت سیگنال تفاضل کافی است که
180بررسی گردد که سیگنال تفاضل با سیگنال مجموع هم فاز است یا رادیان( اختالف فاز دارند.πدرجه )
اگرچه مقایسه ی فاز بخشی از کار رادار تک پالس مقایسه گر دامنه است ولی سیگنالی خطای زاویه ای معموال با مقایسه ی دامنه های سیگنال
( هم زمان به دست می آید.offsetبرگشتی از بیم های منحرف شده ) 118

-تکنیک های فیدهورن )تغذیه کننده آنتن( رادار تک پالس:4-13Mono Puls Antena Feed horn Technique
های ( رادار تک پالس ممکن است شکلی از انواعFeed Hornتغذیه کننده های )بسیار مختلف را دارا باشند.
فیدهورن یا بیشتر می3برای ردیابی در زاویه ی سمت یا ارتفاع آنتن دارای باشد.
شیوه های مختلفی در طراحی فیدهورن ها وجود دارد زیرا سیگنال های مجموع و تفاضل به صورت مطلوب و همچنین سطح های لوپ فرعی
مناسب و مقدورات چند قطبی و سادگی سیستم همگی نمی توانند به صورت مطلوب در یک طراحی حاصل گردند به عبارت دیگر سادگی طراحی فقط
ارزان قیمت بودن آن نیست بلکه مواردی دیگر مانند عدم پیچیدگی باند وسیع سیستم ، پایداری سیستم با دید زاویه ای خوب و بر آورده شدن نیازهای
ردیابی دقیق نیز باید مورد نظر قرار گیرد.
-زاویه ی دید چیست؟4-14 زاویه ی دید عبارت است از محور الکتریکی آنتن یا موقعیت زاویه ای منبع
سیگنال در بیم آنتن که در آن خروجی های آشکارساز خطای زاویه ای صفرمی گردد.
( های تک پالس بهینهFeed Hornیکی از مشکالت اساسی طراحی تغذیه کننده ) سازی هم زمان سیگنال های مجموع و تفاضل است. یعنی مشکل اساسی
سیگنال را به3آن است که انتخاب یک ترکیب از تغذیه کننده ها که بتواند هر حد مطلوب برساند کار مشکلی است.
کانال ) یک کانال3تغذیه کننده های مدرن در حالی که کارایی خوبی را در هر کانال برای سیگنال تفاضل( دارند نیازمندی های2برای سیگنال مجموع و
پالریزاسیون همه جهته را نیز برآورده می نمایند. یک نوع تغذیه کننده( به صورت ساده در شکل زیر نشان داده می شود.Feed Horn 4چهارتایی )
119

-رادارهای ردیاب تک پالس مقایسه گر فاز:4-15Phase Compression Mono Puls Radar
با مقایسه ی اختالف فاز بین سیگنال های دو آنتن جداگانه نیز امکان تعیینزاویه ی دریافت سیگنال در یک مختصات وجود دارد.
آنتن های مورد استفاده در سیستم های مقایسه گر فاز بر خالف آنتن های bur نیستند( و زاویه ی دید )offsetمقایسه گر دامنه ، از محور منحرف نبوده )
sightآن ها با یکدیگر موازی هستند و در این شرایط حجم یکسانی از فضا را ) روشن می نمایند.
در این حالت دامنه سیگنال های برگشتی از هدف ضرورتا برای تمام بیم هایآنتن یکسان ولی فاز آن ها با هم متفاوت است.
سوال/ در رادارهای ردیاب با مخروطی الف( خطای زاویه ای به چه عواملیبستگی دارد؟ ب( خطای دامنه به چه عواملی بستگی دارد؟
سوال/ تفاوت اصلی رادارهای ردیاب مقایسه گر دامنه و مقایسه گر فاز ازنظر قرار گرفتن فید هورن در چیست؟
120

اندازه گیری زاویه ی دریافت سیگنال با مقایسه ی رابطه ی فازی سیگنال ها انجام می شود. اینinter fremiterاز آنتن های جداگانه توسط دستگاهی به نام
دستگاه یک وسیله غیر فعال است که انرژی انتشار یافته توسط هدف رادریافت می نماید.
رادار ردیابی که بر اساس اطالعات فاز کار می کند شبیه سیستم فوق � راداریinter frimeterاست ، منتهی )اما( به صورت فعال . و می توان آن را
دانست.
شکل زیر نشان دهنده ی روابط فازی موج در یک رادار مقایسه گر فاز میباشد.
فاصله هدف تاR مشاهده می گردد که dدر این تصویر دو آنتن با فاصله ی رادار است و در مقایسه با فاصله ی دو آنتن بزرگ در نظر گرفته شده است.
θ( با عمود منصف خط اتصال دو آنتن زاویه ی Line Of Sightخط دید تا هدف )
را به وجود می آورد.
تا هدف به صورت زیر محاسبه می2 و 1بنابراین فاصله ی آنتن شماره گردد:
R1 = R + d/2 Sin θ121

R2 = R - d/2 Sin θ
و اختالف فاز سیگنال های برگشتی از دو آنتن حدودا به صورت زیر خواهدبود:
Δθ = (2π/λ)d Sin θ
( اختالف فاز تابع خطی خطای زاویه ای استSin θ = θبرای زوایای کوچک ) موردServoو ممکن است برای تعیین موقعیت آن ها از طریق مدار کنترل
استفاده قرار گیرد.
اگر هدف بر محور دید آنتن منطبق باشد خروجی های دو آنتن هم فاز خواهند بود. حال اگر هدف به طرف هریک از جهت های منحرف گردد ) از محورها
خارج گردد( یک تغییر فاز نسبی به وجود خواهد آمد و دامنه ی سیگنال در دو آنتن یکسان است به طوری که خروجی آشکارساز فاز خطای زاویه ای فقط
توسط فاز نسبی تعیین می گردد.
از نوع تک پالس مقایه گر فاز:Track- بلوک دیاگرام رادار 4-16
122

در این تصویر آنتن و گیرنده ی یک رادار برای ردیابی یک مختصات زاویه ای باعثIF و طبقات تقویت کننده Mixerمشاهده می گردد. هر تغییر فاز در
( سیستم خواهد شد.bore sightتغییر در محور دید )
- مقایسه ی رادارهای ردیاب:4-17 نوع تکنیک ردیابی مداوم که تاکنون تشریح گردید اسکن مخروطی و تک4از
پالس مقایسه گر دامنه بیشتر از دو نوع دیگر کاربرد دارند به همین دلیل ایندو نوع را با یکدیگر مقایسه می کنیم:
( موجود درSNRوقت هدف تحت ردیابی است نسبت سیگنال به نویز )ا.رادار تک پالس بیشتر از رادار با اسکن مخروطی است.
Sumرادار تک پالس مقایسه گر دامنه هدف را در پیک پرتوی مجموع )ب.
Paternsمی بیند در حالی که رادار با اسکن مخروطی هدف را در زاویه ) ی خارج از بیم آنتن مشاهده می کند.
دسی بل4-2اختالف سیگنال به نویز این دو نوع رادار ممکن است بین ج.باشد.
اگر آنتن های دو رادار دارای یک اندازه ی مشابه باشند پهنای رادار باد.اسکن مخروطی کمی بیشتر از پهنای بیم رادار تک پالس خواهد بود.
به علت اسن که فیدهورن رادار اسکن مخروطی از کانون انحراف دارد(offset.است )
123
دقت ردیابی رادار تک پالس بهتر از اسکن مخروطی است چونه.تغییرات دامنه به صورت قطار پالس در آن بی اثر است.
رادار تک پالس از نظر ساختاری پیچیده تر از اسکن مخروطی است.و.
به کانال گیرنده در رادار تک پالس برای استخراج اطالعات نیاز استز.در حالی که در رادار اسکن مخروطی دارای یک گیرنده است.
- ردیابی در سطح پایین ) زاویه ی کم(:4-18Low angle tracking
( یا نزدیک به سطح زمینlow elevation angleراداری که هدف را در ارتفاع کم )ردیابی می کند دو سیگنال برگشتی از هدف را دریافت خواهد کرد.
سیگنال های دریافتی مستقیم و منعکس شده از سطح زمین در رادار ترکیب شده و باعث اندازه گیری خطای زاویه ای می شود که با اندازه گیری حقیقی که از یک هدف در غیاب انعکاس یافته از سطح زمین انجام می گیرد متفاوت
است سیگنال انعکاس یافته از سطح را سیگنال چند مسیره نیز می گویند.
سیگنال انعکاس یافته از سطح زمین مسیر طوالنی تری را نسبت به سیگنال مستقیم طی می نماید بنابراین در بعضی از مواقع آن ها را در حوزه ی
زمانی یا از نظر فاصله از هم جدا کرد.
ارتفاع آنتنhaتفاوت این دو فاصله از رابطه زیر محاسبه می شود که در آن ارتفاع هدف از سطح زمین است: htرادار از سطح زمین و
ΔR=2.ha.ht/R124

ΔR=0.6 m باشد R = 10 km , ht = 100 m , ha = 30mمثال/ اگر
- ردیابی در فاصله:4-19Tracking in Range
خطای ردیابی فاصله از چندین راه مشخص می گردد که متداول ترین آن ( این گیت ها طوریearly & late gatesاستفاده از گیت مقدم و موخر می باشد )
زمان بندی شده اند که گیت مقدم از شروع گیت فاصله ی اصلی باز و در مرکز آن بسته می شود و گیت موخر از مرکز گیت فاصله ی اصلی باز و در
انتهای آن بسته می شود.
نتیجتا گیت های مقدم و موخر باعث شارژ شدن خازن هایی توسط سیگنالویدیویی برگشتی از هدف در طول زمانی که گیت ها باز هستند می شود.
125

خازن مربوط به گیت مقدم به ولتاژ مناسبی به اولین نیمه از پالس ویدیویی هدف محاسبه می گردد و خازن مربوط به گیت موخر متناسب با دومین پالس برگشتی ولی به صورت منفی شارژ می گردد وقتی این گیت ها به
طور مناسبی روی پالس متمرکز یافتند خازن ها به صورت یکسان شارژ شدهاند که با جمع این ولتاژها ولتاژ خروجی به دست می آید.
وقتی گیت ها بر روی سیگنال برگشتی متمرکز نشود به طوری که گیت مقدم از مرکز ویدیویی هدف عبور نماید خازن مربوط به گیت دیگر بخش کمی از
پالس را می بیند و باعث کمتر شارژ شدن آن می گردد در نتیجه با جمع ولتاژهای این خازن ها یک ولتاژخروجی مثبت به وجود خواهد آمد که سیگنال
خطا خواهد بود که این سیگنال خطا معیاری برای اندازه گیری اختالف بین مرکز پالس و مرکز گیت است و عالمت آن تعیین کننده جهتی است که گیت
ها باید توسط سیستم کنترل ، تغییر محل داده شوند وقتی سیگنال خطا صفر باشد گیت ها برروی پالس منطبق هستند به این طریق گیت کردن فاصله
های مورد نیاز برای انجام ردیابی اتوماتیک دارای مزیت های زیادی می باشد.
- رادارهای ارتفاع یاب:4-20High Finder Radars
راداری که کار آن اندازه گیری زاویه ی ارتفاع است و زاویه ی سمت رااندازه گیری نمی کند به رادار ارتفاع یاب موسوم است.
رادرا ارتفاع یاب به دو گروه تقسیم می شود:
رادارهایی که فقط ارتفاع را اندازه گیری می کنند.(1 بعدی که مختصات خاص هدف را مثل زاویه ی ارتفاع ،3رادارهای (2
فاصله و زاویه ی سمت به صورت هم زمان اندازه گیری می نمایند.مشخصات بیم رادارهای ارتفاع یاب: در ارتفاع باریک ، در افق پهن
(nadingتوضیح این که : رادار ارتفاع یاب با بیم متحرک در جهت عمودی ناد) می کند این نوع رادارها زاویه ی ارتفاع هواپیما را از طریق اصول اولیه عمل
126

( اندازه گیری میvertical planاسکن مکانیکی مداوم در صفحه ی عمودی )نمایند.
( :3D- رادارهای سه بعدی )4-21Three Dimentional Radar
رادار سه بعدی رادار جستجوگری )سرچی( است که در حین عمل اسکن بر روی هدف اطالعات زاویه ی ارتفاع هدف را عالوه بر فاصله و سمت اندازه
گیری می نماید.
ی ده هزارپا می± بیم دارد و اختالف ارتفاع را 2رادار کاستا فقط دهد.
رادارهای سه بعدی رادارهایی هستند که بیش از یک بیم دارند.
هرچه تعداد بیم ها بیشتر باشد محاسبه ی ارتفاع هدف دقیق تر است فضای مورد کاوش در این راداها به تعدادی بیم تقسیم می شود ، انرژی موجود در
هر بیم توسط فرستنده و توسط تقسیم کننده ی توان تأمین می شود تقسیمتوان در بیم ها ممکن است به یک اندازه نباشد.
127

بیم هایی که ارتفاع پایین و فاصله ی کم را پوشش می دهد دارای توان کمتری نسبت به بیم هایی هستند که ارتفاع باالتر و فاصله بیشتری را تحت
پوشش قرار می دهد.
دالیل استفاده از رادار سه بعدی چیست؟
امکان پذیری دادن پوشش در کل قطاع توسط یک بیم -1 جدا نمودن سیگنال های کالتر و جمینگ دریافت شده در بیم های پایین-2
تا این که هدف های با ارتفاع باالتر با ضریب اطمینان بیشتریآشکارسازی شوند.
کاهش حجم کالتر و چف و کالتر بارانی که با هدف ها در هر یک از بیم-3ها برابری می کند.
بیم:V- رادار های 4-22 درجه نسبت به یکدیگر قرار گرفته45در این نوع راداها دو آنتن با یک زاویه
شکل در فضا می گردند یکی از آن ها بهVاند و باعث ایجاد پرتوی تشعشعی ( می باشد.Slantصورت عمودی و دیگری به صورت مایل )
در این رادار ابتدا هدف وارد یکی از بیم ها شده و پس از مدتی وارد بیم دیگر می شود هرچه ارتفاع هدف بیشتر باشد این اختالف زمانی با توجه به
وضعیت بیم ها بیشتر است بنابراین با توجه به سرعت هدف و این اختالفزمانی ارتفاع هدف محاسبه می شود.
128

توضیح این که: نحوه ی چرخش به گونه ای است که ابتدا بیم عمودی به هدف برخورد می کند و سپس بیم فایل. و بر مبنای زاویه ی چرخش آنتن )
θ.بلیپ ها بین کانون های بیم عمودی و مایل اندازه گیری می شود )
- رادارهای چند بیمی:4-23Stacek Beam Radar
بعدی چند بیمی با استفاده از یک توده ی بیم عمودی از نوع بیمNرادارهای ( با ارتفاع ثابت که به طور دائم و به صورت یکپارچهPencil Beamهای مدادی)
در زاویه ی سمت می چرخند یک پوشش اسکن حجمی ایجاد می کنند.
در این نوع رادارها هر بیم یک رادار جداگانه به حساب می آید. چون در عمل می نماید و همچنینFan Beamفرستنده مجموعه ی این بیم ها به صورت
از مجموعه ی کلیه ی بیم های مداری برای پوشش ارتفاع استفاده می شود.
توضیح این که: هر یک از بیم های مدادی تا ارتفاع خاصی را پوشش می دهند و برای هریک از بیم ها گیرنده ی جداگانه ای برای استخراج اطالعات هدف
موجود در آن بیم مورد نیاز است.
هر بیم مدادی حجم فضای محدودی را پوشش می دهند. که این خود یک مزیت است زیرا در صورت وجود کالتر زمینی ، باران یا چف در هر یک از این
مربوط به خود استفاده کرد.MTIها می توان از تکنیک های
129

توضیح: برای ایجاد یک سیگنال ویدیویی ارتفاع و فاصله توسط بیم های چندگانه این رادارهای چند بیم معموال به مداری مجهز هستند که به طور
دلخواه فقط دو بیم مجاوری که سیگنال هدف در آن قوی تر است انتخابمی نماید.
- رادارهای اسکن سه بعدی:4-24 رادارهای اسکن سه بعدی یک نمونه ی اساسی دیگر از ترکیب تکنیک های جست و جو و ارتفاع یابی مناسب برای مراقبت حجمی مداوم در وضعیت
های ترافیک سنگین هوایی می باشد.
این نوع رادارها از آنتنی استفاده می نمایند که در حین چرخش در سمتدارای اسکن سریعی در پوشش ارتفاع نیز می باشند.
- اسکن الکترونیکی:4-25Electronical Scanning
بیم یک آنتن آرایه ای ممکن است با تغییر فاز در ورودی هر عنصر هر آرایه به صورت الکترونیکی در فضا هدایت گردد. با ایجاد اختالف فاز بین ورودی های عنصر آرایه توان های ناشی از آن ها نیز به گونه ای ترکیب می گردد که بیم
اصلی در جهتی غیر از حالت قبل قرار خواهد گرفت بنابراین این تغییر فازمداوم باعث تغییر جهت هدایت بیم خواهد گردید.
130

- اسکن فرکانس :4-26 در گروه اسکن کننده های بدون حرکت مکانیکی آنتن یکی از تکنیک های
اساسی که در کاربردهای حرکت بیم ) جهت ارتفاع یابی و کاوش در سمت(اسکن فرکانس می باشد این نوع اسکن کننده ها با بکارگیری تغییر فاز )
frequency phase shiftingدر یک خط انتقال طوالنی یا موجبرهایی که به صورت ) مارپیچ خمیده شودن و با عناصر دیگر در آنتن شکل یک آرایه ی خطی به
وجود می آمدند که یک روش دقیق برای تغییر موقعیت بیم تولید شده از تغییرفرکانس استفاده می نمایند.
نمونه های دیگری از اسکن فرکانس بدین صورت است که عناصر آرایه با طول یکسان در مجاور هم قرار گرفته اند و وقتی که ورودی هر عنصر در
باشد فاز ورودی همه ی عناصر یکسان خواهد بود. و بیم حاصلf0فرکانس فاصلهf0شده در جهت محور آرایه قرار می گیرد. هرچه فرکانس ورودی از
( اختالف فاز در هر بخش خط انتقالf0 ± Δfبگیرد ) به طرف باال یه پایین رود ) به همان اندازه ) به صورت تابعی از فرکانس( افزایش یا کاهش خواهد یافت
در نتیجه باعث حرکت بیم خواهد شد.
131
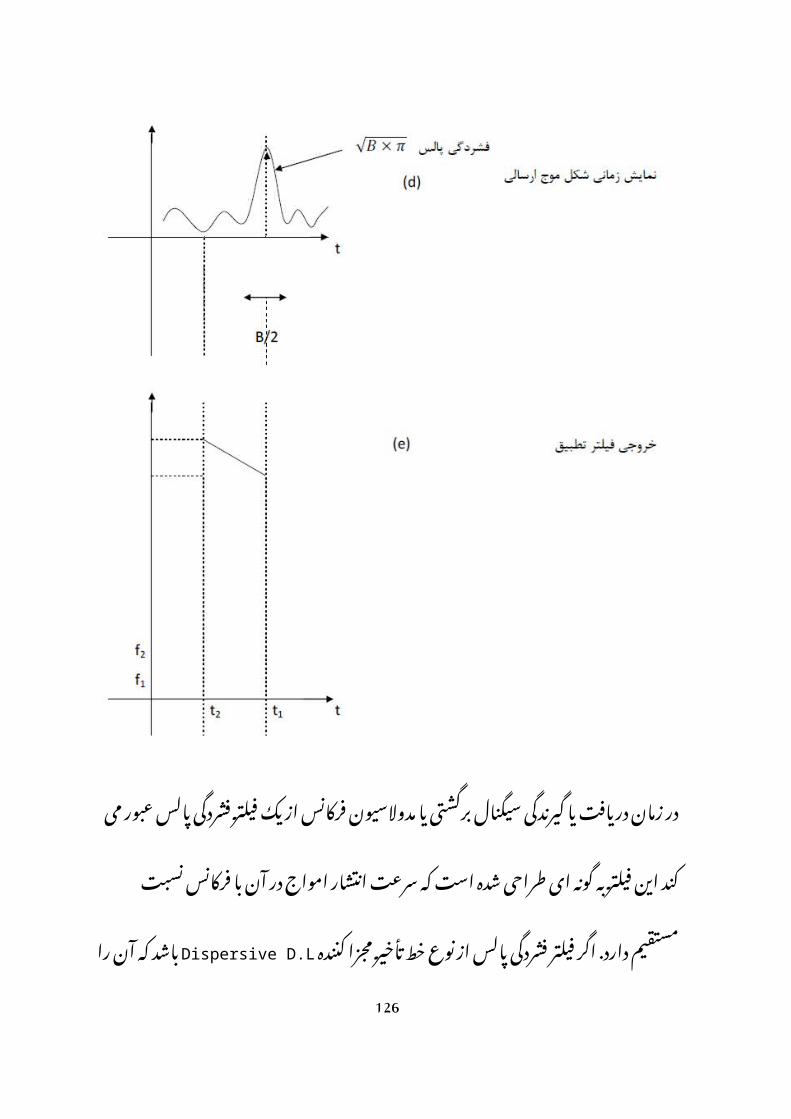
اختالف فاز به صورت منفی بوده وf0به عنوان مثال برای فرکانس های زیر بیم به طرف زوایای منفی محور اصلی ) بیم اصلی ، بیم رفرنس/ مرجع(
هدایت می گردد.
باشد بیم به طرف زوایای مثبت محور اصلی f0همچنین اگر فرکانس بیشتر ازهدایت خواهد شد.
132
فصل پنجماصول آرایه فازی
133

- اصول آرایه فازی:5-1الزامات آرایه فازی برای سیستم ها:
قابلیت تفکیک در زاویه است که بستگی به نقاط نیم توان بیم دارد که-1 در رادارهای آرایه فاز ی در هر بیم نقاط نیم توان از رابطه زیر به
دست می آید:
θ3db=k . λd
3db پهنای بیم در نقاط نیم توان
k رادیان22درجه و 70 عدد ثابت بین
λطول موج برحسب متر
dقطر دهانه ای که ) سلولی که ( بیم را می سازد بر حسب متر
نمایش داده میxRδ( که با cross range resolutionقدرت تفکیک در برد )-2شود به صورت زیر محاسبه می شود.
- ترکیبات آرایه فازی:5-2 با توجه به شکل فوق توان سیگنال دریافت شده توسط هر گیرنده ی جزء
) گیرنده هر عنصر ( با هم طبق شکل فوق و بر اساس روابط زیر جمع می به دست آید.EOut یا Eaشود. تا
134

توضیح: برای به دست آوردن روابط:
مرکز آرایه را به عنوان مرجع در جایی در نظر می گیریم که فاز آن صفربوده و فاز عناصر هم جوار به صورت زیر تغییر می کند.
135

- محاسبه ی خروجی آرایه چهار نقطه ای:5-3این خروجی از رابطه ی زیر محاسبه می شود.
Ed = Sin (ωt + 3φ2 ) + Sin (ωt +
φ2 ) + Sin (ωt -
φ2 ) + Sin (ωt -
3φ2 )
= Sin (ωt) [ 2Cos ( 2φ2 ) + Cos (
φ2 )]
= Sin ( ωt) sin(3 φ
2)
sin(φ2)
در نتیجه :
نقطه ای :nمحاسبه ی خروجی آرایه ی
Ed = Sin ( ωt) sin(n φ
2)
sin(φ2)
قرار دهیم:Ed را در عبارت φاگر مقدار
136

Ed = Sin ( ωt) sin[ Nπdλ ¿sin θ]
sin [ πdλ ¿sin θ ]¿
¿
- عمل اسکن در طول پالس در رادارهای آرایه فازی:5-4 در این نوع اسکن فرکانس سیگنال برگشتی دریافت شده بستگی به زاویه ی
ارتفاع هدف خواهد داشت و یک مجموعه ی گیرنده که هرکدام به یک فرکانس تنظیم شده اند پوشش قطاعی ارتفاع را با بیم های دریافت کننده
موازی به وجود می آورند در نتیجه زاویه ی ارتفاع هدف توسط گیرنده ی تحریک شده مشخص می گردد. که این تکنیک به تکنیک اسکن در طول پالس
موسوم است.
بهره ی آنتن برای آرایه های بزرگ ، بهره آنتن بدون اسکن با بهره ی آنتن بهسطح موثر ثابت برابر است و از رابطه ی زیر محاسبه می گردد:
G0= 4 π × Aλ2
توضیح این که : اگر بیم به صورت الکترونیکی تحت یک زاویه ای تغییر کند ) اسکن کند ، زاویه بگیرد( بر بهره آنتن اثر خواهد گذاشت، بر اساس رابطه
زیر
G (θ0) = 4 π × A× cosθ ∙
λ2
اگرθباشد بیم ثابت است هرچهθرا افزایش دهیم برگشتی کمتر می شود
) زاویه چیخش بیم درθبا توجه به رابطه فوق می بینیم که هر چقدر زاویه ی طرفین و ارتفاع ( بیشتر شود بهره آنتن کم می شود و دریافت اهداف یا
سطح مقطع راداری کم در فاصله مناسب مشکل می شود.
137
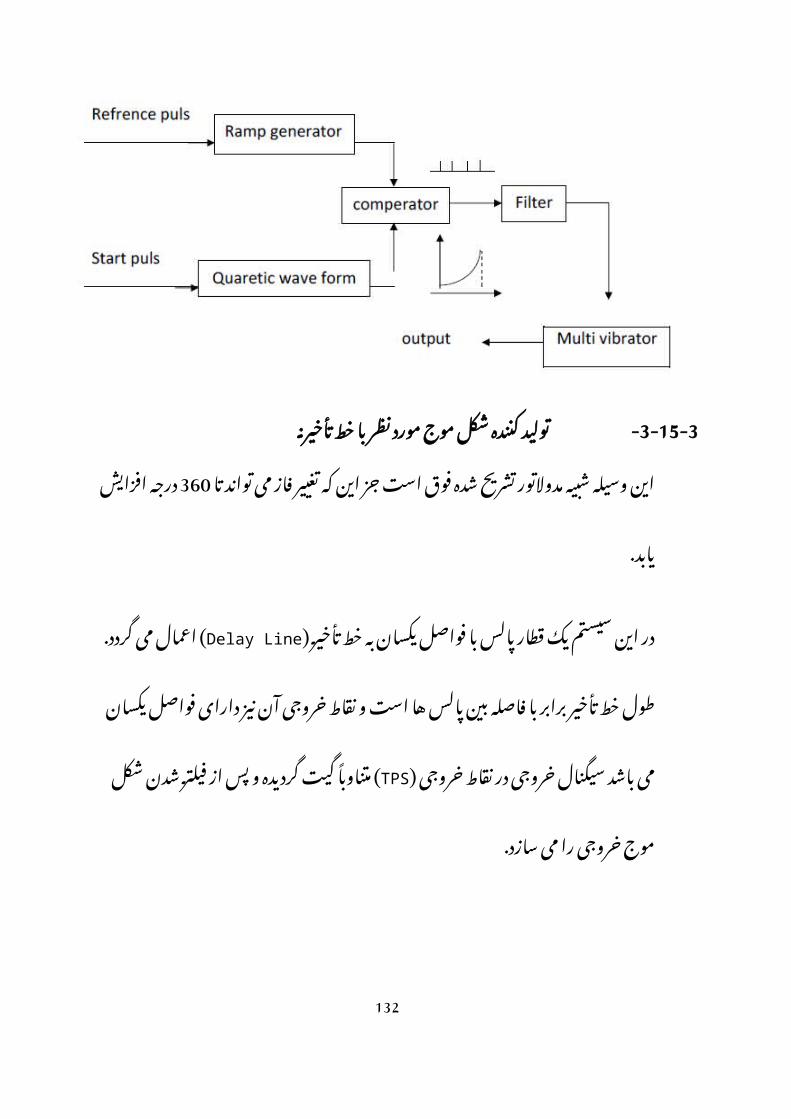
- هدایت بیم:5-5Beam Steering
( را می توان با تغییر فاز مناسب درphase arrayپرتوی آنتن های آرایه فازی ) ورودی هر المان ) عنصر ( به سرعت در فضا هدایت نمود. آرایه دارای
( را در نظر بگیرید. فاصله ی بین عناصر مجاورdعناصری با فواصل یکسان ) و دامنه ی پیام های ) اکوهای ( وارده در تمام عناصر یکسان فرضdبرابر
شده است . اگر پیام های وارده در تمام عنار هم فاز باشند و اختالف فاز درθ = 0نسبی بین عناصر مجاور برابر صفر بوده و پرتوی اصلی با زاویه ی
سطح آرایه گسترده خواهد بود.
( جهت پرتویφ≠ 0اگر اختالف فاز نسبی بین عناصر برابر صفر نباشد ) یعنی
sin θ0اصلی در راستای سطح آرایه نخواهد بود. و اگر اختالف فاز برابر
2π dλ =
φ باشد پرتوی اصلی در جهت زاویه ی θ0 0 و بنابراین فاز هر عنصر برابر +m. φ
θ.خواهد بود
m= 1,2,…,∞
تغییر پهنای پرتو )بیم( در اثر تغییر زاویه هدایت:
( در امتداد محور آنتن پهنای پرتو در نقاط نیم توان )beamبا قرار گرفتن پرتو )3db.واقع در سطح اسکن شونده افزایش می یابد )
138

تقریبا نسبت معکوس دارد.Cos θ0پهنای پرتو با
زاویه ای است که نسبت به محور اصلی آنتنθ0توضیح این که: زاویه ی اندازه گیری می گردد.
- مقایسه ی تغذیه گرهای موازی و متوالی:5-6 قرار گیرد باید اختالفθ0برای این که پرتوی اصلی تابشی در راستای زاویه ی
2πdفاز نسبی بین عناصر مجاور یک آرایه برابر= λ Sin θ0 =
φψباشد. اختالف
فاز الزم بین عناصر را می توان به یکی از دو صورت زیر ) موازی یا متوالی (ایجاد نمود.
در تغذیه ی متوالی ممکن است انرژی از یک انتهای آرایه ) خط ( وارد گردد و یا از میانه ی خط وارد شود و به سمت چپ و راست تقسیم گردد و به سوی
دو انتهای آن منتشر شود.
مانند شکل های زیر:
) فازگردان ( قرار دارد کهphase shifterتوضیح این که : بین عناصر مجاور یک می باشد در حالی که در آرایه ها با تغذیه یφمیزان تغییر فاز آن ها برابر
) تقسیم کننده ی توان (power dividerموازی انرژی تابشی به وسیله ی یکبین عناصر مختلف توزیع می شود.
:phase shifterانواع
ازV که با سرعت Fبا توجه به این که یک موج الکترومغناطیسی با فرکانس پیدا می کندφ منتشر شود اختالف فازی برابر Lطریق خط انتقالی به طول
که از رابطه ی زیر به دست می آید:
φ=2πFLV
=2πLλ
بنابراین تغییر فاز به تغییر فرکانس ، طول خط انتقالی ، سرعت انتشار وضریب هدایت ) ثابت دی الکتریک( بستگی دارد.
139
البته تغییر فرکانس برای تغییر فاز به منظور هدایت الکترونیکی پرتو روشنسبتا ساده ای است نسبت به عوامل دیگر.
یکی از روش های متداول تغییر فاز به کارگیری فازگردانی است که برایایجاد تغییر فاز طول فیزیکی یک خط انتقال را تغییر می دهد.
به دلیل این که تغییر فاز به جهت انتشار بستگی ندارد بسیاری از وسایل تغییر دهنده ی فاز به صورت دو طرفه می باشند ) ارسال و دریافت ( البته بعضی
از تغییر دهنده های فاز دو طرفه نیستند که این گونه تغییر دهنده ها برایارسال و دریافت باید به طور متفاوتی تنظیم شوند.
البته یک تغییر دهنده ی فاز باید بتواند:
فاز خود را به سرعت تغییر دهد(1قدرت زیادی را تحمل کند(2به پیام کنترل کم قدرت نیاز داشته باشد (3تلفات کم داشته باشد(4سبک و کوچک باشد (5عمر طوالنی داشته باشد(6قیمت آن معقول باشد(7
140

I.:فاز گردان های دیجیتالی فاز گردان هایی که به روش دیجیتالی گزینش می شوند با انتخاب یکی از
مسیرهای خطوط انتقال می توان فاز را تغییر داد تا مقدار فاز مورد نظر به طور تقریبی به دست آید. با کلیدهای الکترونیکی سریع خطوطی با طول های
متفاوت به مدار وارد و یا از آن خارج می شوند که عناصری مانند دیودهای نیمه هادی و فریت ها از وسایلی هستند که در فازگردان های دیجیتالی به کار
می روند.
II. فازگردان هایPhase shifter:های ( دیودی ) ویژگی دیودهای نیمه هادی که برای فازگردان هیا مایکرویو مناسب است آن
است که با تغییر ولتاژ بایاس امپدانس آن ها تغییر می کند این خاصیت بهدیود امکان می دهد که مثل یک کلید عمل کند.
بر اثر تغییر ولتاژ مقاومت درونی دیود تغییر می کند و در نتیجه سرعت امواج تغییر خواهد کرد.θتغییر خواهد کرد بنابراین طبق فرمول فوق
فازگردان ها دیودی قدرت نسبتا زیادی داشته و تلفات آن ها نسبتا کم است و به سرعت از حالتی به حالت دیگر تغییر وضعیت می دهند و به دما حساس
نیستند ، دارای ابعاد کوچکی هستند و با قدرت کم کنترل می شوند.
III.:فازگردان ها فرو مغناطیسی
141

فریت یک اکسید فلزی عایق و قابل آهنربا شدن است. که یون های آهنربای آن طوری قرار گرفته اند که می توانند آهنربای لحظه ای ایجاد کنند و در عین
حال هم خاصیت نارسایی خود را حفظ کنند.
فریت ها عایق هایی با مقاومت زیاد هستند و به امواج الکترومغناطیسی اجازه ی نفوذ می دهند البته قابلیت نفوذ امواج الکترومغناطیسی در آن ها
متفاوت است که از این خاصیت برای انحراف امواج الکترومغناطیسیاستفاده می نمایند.
اکسیدهای فلزی با ترکیبات مختلف را با هم ترکیب کرده به صورت خمیر در آورده و به شکل میله های فریتی در آورده و در کوره می پزند تا محکم شود
سپس بر اساس طول موج رادار برش می زنند.
با تغییر مقدار جریان سیم پیچ شدت میدان مغناطیسی که بدور فریت پیچیده شده تغییر می کند و باعث کنترل سرعت گذر امواج می شود. و بدین وسیله
جهت تابش پرتو را تغییر می دهد.
تغذیه گرهای آرایه:
اگر به یک آرایه ی فازی تنها یک گیرنده و فرستنده متصل باشد باید یک نوع شبکه وجود داشته باشد تا تنها دریچه ی فرستنده و یا گیرنده را به هریک از
دریچه های عناصر تابشی متصل کند برای این منظور از سیستم تقسیم کنندهی توان استفاده می شود.
142
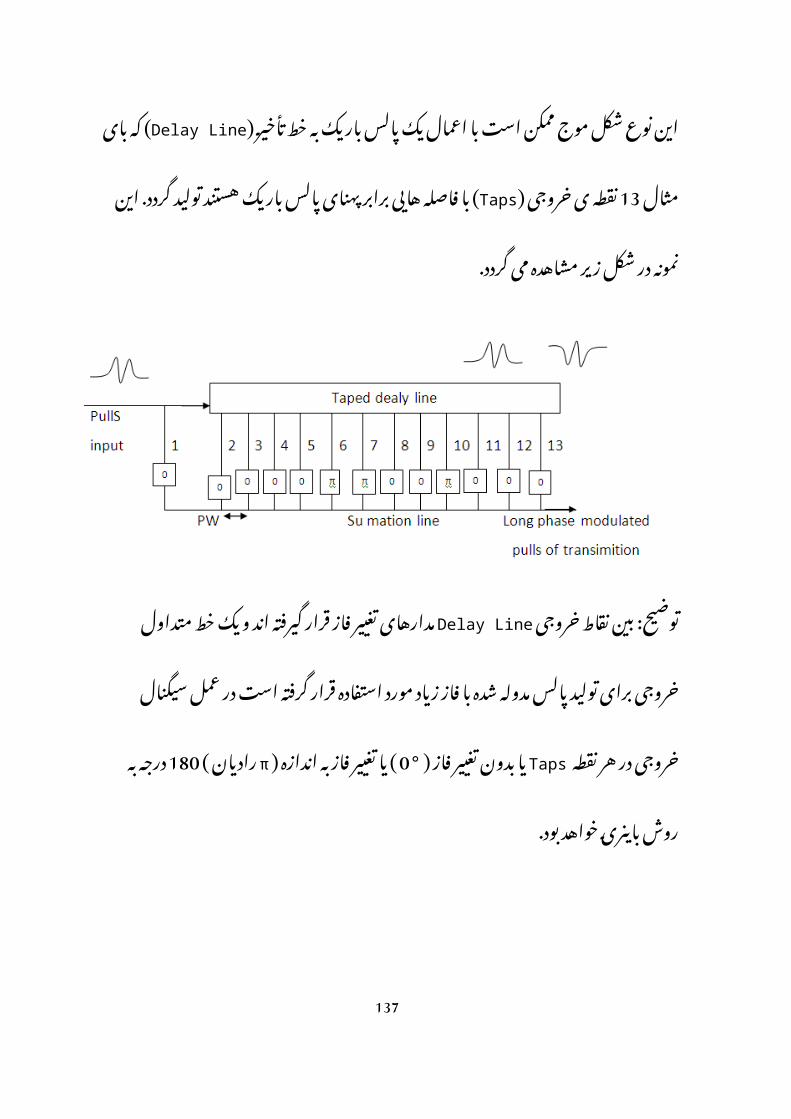
I.:)تغذیه گرهای تابشی ) دورتاب نوع تغذیه گر تابشی وجود دارد آرایه2از نظر شباهت به عدسی یا باز تاینده
ی عدسی درست مانند یک آنتن عدسی به وسیله ی یک تغذیه گر اصلی تغذیه می شود و مجموعه ای از عناصر آنتن انرژی تابشی را جمع آوری نموده و از
هایی که جبهه ی موج کروی را اصالح نموده و همین طورPhase shifterدرون یک تغییر فاز خطی در گستره ی سطح آرایه ایجاد می کنند عبور می دهد تا
پرتو را هدایت کند.
یک مجموعه ی دیگر عناصر هم در سوی دیگر آرایه پرتو را در فضا منتشرمی کند مانند شکل زیر:
143

II.:تغذیه با صفحات موازیParallel – Plate - Feeds
آنتن های پیل باکس تا شده ، شیپورهای تغذیه ای با صفحات موازی برای توزیع انرژی بین عناصر آنتن مورد استفاده قرار می گیرند که آن ها را
سیستم های تغذیه فعال می گویند و اصوال برای تغذیه ی آرایه های خطی بهکار می روند.مانند شکل زیر:
144

- معایب و مزایای رادارها آرایه فازی:5-7آنتن آرایه فازی دارای ویژگی های مطلوب ذیل می باشد:
هدایت سریع پرتو-1ایجاد چنداین پرتوی مستقل -2توانایی ارائه توان های پیک و قدرت باال-3کنترل نمودار تابشی -4کاهش تدریجی )کند( انرژی به بیم ها-5نثبیت بیم به روش الکترونیکی-6
معایب:
ساختار پیچیده -1هزینه ی نسبتا زیاد-2دارای قطعات بحرانی زیاد-3 به هنگام چرخش ، بیم ها به دلیل تغییر عرض بیم رزولوشن به هم می-4
ریزد
145

- فرق رادارهای اولیه و ثانویه چیست؟5-8 رادارهای اولیه وابسته به سیگنال منعکس شده از هدف می باشند و
اطالعات کافی در اختیار نمی گذارند و در ضمن دارای قدرت کالتر زیادی می امواج از طریق زمین یا جو (Reflectباشند ) به علت انعکاس یا
رادارهای ثانویه:
1030فرکانس ارسالی MHz
1090فرکانس دریافتی 2توان پیک حدود kw ( حساسیت گیرندهMDS-)98db
یک سیستم رادار ثانویه دارای یک فرستنده و گیرنده بر روی زمین به نامIntegratorیا پرسش کننده و یک فرستنده و گیرنده بر روی هواپیما است به نام
Transponderیا پاسخ دهنده که فرکانس سیستم پرسش کننده و پاسخ دهنده با هم فرق دارد.
به شرح زیر می باشد:IFFنیازمندی های ضروری یک سیستم
فرستنده و گیرنده ف هم برای پرسشگر و هم برای پاسخگو.1 سیستم آنتن زمینی با بیم چرخنده ) پهنای باریک در سمت و پهنای.2
وسیع در ارتفاع(
146
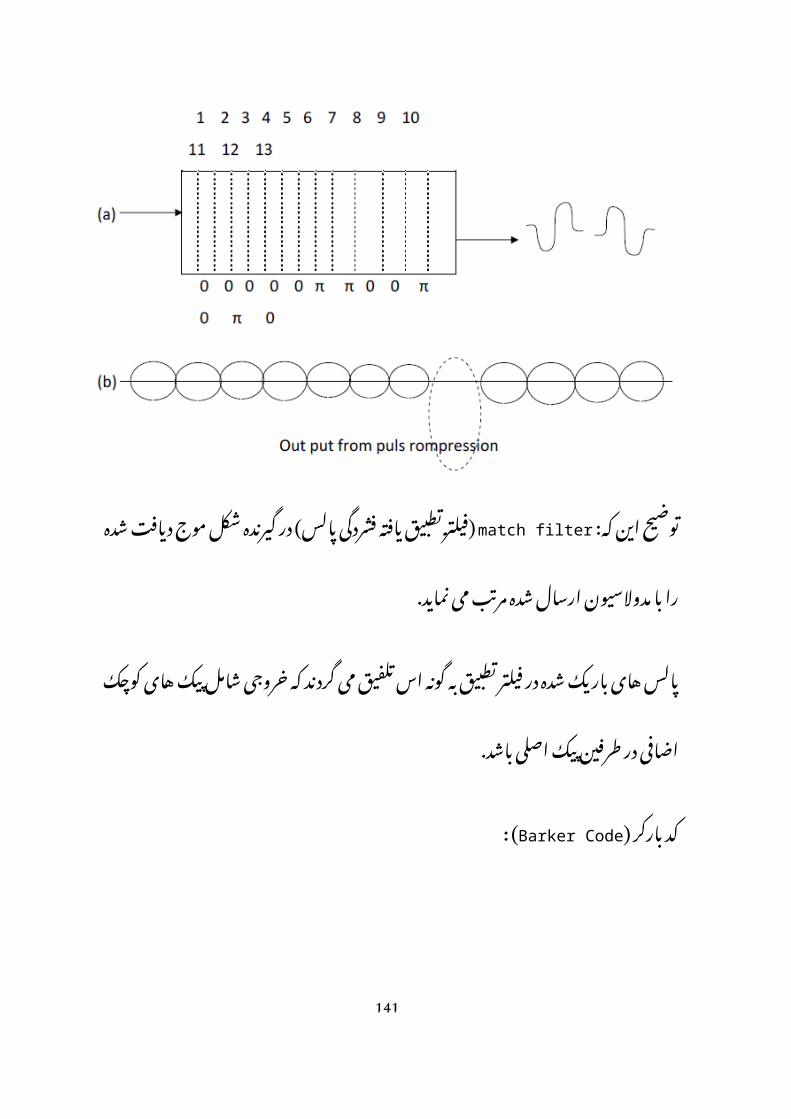
:Transponderفرستنده و گیرنده در هواپیما .3( نصب شده بر روی هواپیماOmidirectionalآنتن همه جهته ).4وسیله ی استخراج اطالعات دریافتی در ایستگاه زمینی.5
در باالی آنتن رادارIFFتوضیح این که: در بعضی از ایستگاه های زمینی آنتن نصب گردیده و همراه آن می چرخد:
:IFF- درهای سیستم 5-9 : این مد برای شناسایی عمومی هواپیماهای دوست از دشمن به1مد ا.
( شامل یکintegration signalکار گرفته می شود. سیگنال پرسشگر ) است وμ sec 3جفت پالس یک میکرو ثانیه ای و فاصله ی بین آن ها
است.μ sec 1سیگنال جواب در این مد یک پالس
: این مد برای شناسایی دقیق تر هواپیماهای بخصوص ) شکاری(2مد ب.به کار می رود.
147

و فاصله یμ sec 1مشخصات سیگنال پرسشگر در این مد: یک جفت پالس μ sec 16 به فاصله ی μ sec 1 و پاسخ هواپیما دو پالس μ sec 5بین آن ها
: این مد برای تشخیص نوع عملکرد هواپیما مورد استفاده قرار3مد ج. (ATCمی گیرد. و کاربرد مستقیم آن در کنترل ترافیک هوایی است )
μ 8 به فاصله ی μ sec 1سیگنال پرسشگر در این مود یک جفت پالس
sec 1 و سیگنال جواب یک پالس μ sec.است د.
) مد چازلی(: این مد برای گرفتن ارتفاع هواپیما به کار می رود وCمد ه. با ارسال سیگنال در این مد توسط پرسشگر با گرفتن اطالعات از
سیستم ارتفاع سنج هواپیما این اطالعات را به سیستم پرسشگر ارسال می نماید که در روی اسکوپ و در محل مربوطه نزدیکی
اسکوپ عدد ارتفاع نوشته می شود.
148

برای نشان دادنIFFعالوه بر این مدها هواپیما می تواند از سیستم وضعیت اضطراری استفاده نماید. در این حالت با استفاده از یک سوئیچ
4 در پاسخ هر یک از مدهای باال Transponderمخصوص در هواپیما سیستم ارسال می نماید.μ sec 16 به فاصله μ sec 1پالس متوالی
:SIF- سیستم 5-10Selective Identifications Feature
می باشد.IFF سیستم اضافی مورد استفاده برای سیستم SIFسیستم سیستم را قادر می سازد که نه فقط از مدهای کاری مختلفSIFاستفاده از
استفاده کند بلکه کدهای موجود در هر مد را نیز مجزا نماید.
مورد استفاده قرار گیرد مشخصات پرسش های اصلی برایSIFوقتی که مد نظیر آن چه که تشریح گردید تغییر نخواهد کرد اما در سیستم3هریک از باعث می گردد تا پالس های نرمال پاسخSIF ( دستگاه Transponderهواپیما )
پالس را ایجاد نماید. به صورت زیر:14یک قطار پالس شامل
Bracket( در این قطار پالس به نام فارمینگ یا f1 , f2اولین و آخرین پالس )
با هم فاصله دارند. این دو پالس در پاسخ به مد پرسشگرμ sec 20.3هستند که که در سیستم هواپیما برای آن تنظیم شده باشد ارسال می گردد. در بین این
پالس وجود دارد که هرکدام به ترتیب اهمیت مشخص گردیده و12دو پالس پالس وجود دارد که در حقیقت دو گروه پالس12یک فاصله در وسط این
149
و فاصله ی بین دوμ sec 1.45هفت تایی وجود دارد که فاصله بین پالس ها می باشد.μ sec 2.9گروه
در پاسخ سیستم هواپیماBracketهریک یا کلیه ی دوازده پالس بین پالس های (Transponderظاهر می گردد ولی تعداد حقیقی بستگی به کد انتخابی در یک )
و یک مقدارA , B , C , D پالس یک معرف : 12مد بخصوص به هریک از این داده شده است.4 , 2 , 1عددی :
توجه داشته باشید که گروه ها به طور متوالی باز نمی گردند بلکه گروه های در دومین دسته ادغام و باز می گردند. هر کدD , B و گروه های C , Aپالس A رقم است که هر رقم از یک گروه می باشد. پالس های گروه 4شامل
7 تا 0اولین رقم بسته به پالس های ظاهر شده در آن گروه هر مقدار از نشان داده می شود:
A1 B2 B4 D1 D4 1605مثال/ کد
دومین رقم و پالس هایB اولین رقم و پالس های گروه Aپالس های گروه چهارمین رقم را به وجود میD سومین رقم و پالس های گروه Cگروه آورند.
ارسال می گردد ترتیب کد به صورتBracketبنابراین وقتی فقط پالس های خواهد بود.0000
ظاهر می گردد7777زمانی که همه پالس ها ارسال می گردد به صورت اگر همه ی پالس های مورد استفاده قرار گیرند امکان دستیابی به حداکثر
کد مختلف در هر مود وجود خواهد داشت.212 = 4.96
: از آن جایی که این مد یک مد شناسایی عمومی است معموال یک کدIمد مشترک برای کلیه ی هواپیماهای خودی مورد استفاده قرار می گیرد و در
زمان صلح هر چند مدت یکبار این کد تغییر می نماید و تنها پالس های ( هستند به طوری کهA1 A2 A4 B1 , B2 مورد استفاده در این مد )SIFاطالعاتی
کد در آن وجود دارد.32= 25کال 150

A1 A4 B2 چه پالس هایی ظاهر می گردد. I در مد 5200مثال/ کد
: این مد یک مد شناسایی فردی است به طوری که به هر یک ازIIمد هواپیماها یک کد از این مد تعیین شده قبل از پرواز داده می شود. در این مد
پالس اطالعاتی برای هر کد استفاده می گردد که سه پالس6تعداد ثابتی از می باشد.D و یا B و سه پالس دیگر از گروه C یا Aآن از گروه
A4 B1 B2C1 C2 D1 دارای پالس های : II در مد 4331مثال/ کد
: این مد برای شناسایی ترافیکی به کار می رود و نمایانگر عملکرد یکIIIمد هواپیما برای استفاده در است. کدها معموال قبل از پرواز داده می شود در
پالس اطالعاتی در این مد به کار گرفته می شود که همه6حال حاضر فقط کد در این جا64 = 26 هستند و حداکثر B و Aاز یک گروه یا هر دو گروه
وجود داد.
A1 B2 B4 1600مثال/ کد
قسمت تشکیل شده7گیرنده ی رادار ناظر: این گیرنده از
RF (RF Section)بخش -1
کنسول آنالوگ-2گیرنده
(Analog receiver consol (Arc) )
کنسول اصلی-3دیجیتال
(Digital Master consol (Dmc) )
کنسول فرعی-4دیجیتال
(Digital slave consol (Dsc))
(Power Distribution panl (PDS)) تابوی تقسیم برق-5
کنسول راه دور-6رادار
(Digital Remot consol (DRC))
151

:RF- بخش 5-11 را به صورتRFفرستنده رادار امواج الکترومغناطیسی فرکانس باالی
T و با پریود Zمجموعه ای از پالس های مدوله شده ی متناوب با پهنای پالس
= PRT = 1/ PRFدر جهت بیم آنتن ارسال می کند که در اثر انعکاس از اشیاع و محیط اطراف رادار بخشی از این انرژی پراکنده شده به طرف رادار بر می
گردد. امواج بسیار ضعیف برگشتی از فضا که با نویز جمع شده اند توسط توسط یک تقویت کنندهRF ابتدا در بخش Doplexorآنتن دریافت شده و بعد از
به مقدار کافی تقویت و سپس به منظور تقویتLNA با نویز کم به نام RFی درStaloمجدد سیگنال و انجام عملیات الزم جهت آشکار سازی با سیگنال
را تولید می کنندIF آنالوگ مخلوط شده و سیگنال باند میانی consolقسمت آنالوگ گیرنده ارسالconsol اولیه بهFiltering پس از تقویت و انجام IFسیگنال
می شود.
(ARC- کنسول آنالوگ گیرنده: )5-12 IFکنسول آنالوگ یکی از بخش های اصلی گیرنده می باشد که سیگنال
دریافت کرده و پس از تقویت مجدد و آشکارRFتقویت شده را از بخش سازی جهت انجام پردازش های نهایی و نمایش ، انواع سیگنال باند پایه )
Videos را ایجاد می کند . سیگنال های )Trigerمورد نیاز بخش های مختلف ( ، بخش مدوالتور و ... در اینRF( ، بخش )HFمانند اسکوپ ها، ارتفاع یاب ) طبقه می باشد.4 دارای ARCبخش تأمین می شود. کنسول
فرستنده در طبقه سیگنال ژنراتورRF مورد نیاز بخش RFسیگنال های -1RF.تولید می شود
(Cohoهمچنین سیگنال مرجع اصلی جهت آشکارسازی هم فاز ) سیگنال ها سیگنال های هم زمانی در این طبقه تولیدTrigerسیگنال ویدیو و تولید
می گردد.
سیگنال های راه انداز فرستنده و کلیه یTrigerدر طبقه ی مولد -2 ، فرستنده وARC و Dmcسیگنال های و فرالمین مورد نیاز بخش های
اتاق عملیات تولید می گردد.152

در طبقه ی ویدیو تقویت ،RF دریافت شده از بخش های IFسیگنال -3 ، Bipolarفیلتر ، تقسیم و آشکارسازی می شود و در مجموع ویدوهای
Digitized ،m/n – A و log.برای پردازش و نمایش به ارسال می شود را نیز می توان برای نمایش بهm/n - A و logتوضیح این که : سیگنال های
اسکوپ های اتاق عملیات ارسال نمود.
ARC
Signal generator
stalo / Coho
Tiggerطبقه مولد
videoطبقه ی مبدل
منبع تغذیه
- منبع تغذیه :5-13 ARCولتاژهای جریان مستقیم الزم جهت تغذیه ی واحدهای مختلف موجود در
در طبقه منبع تغذیه تولید می شود.
(DMC- کنسول اصلی دیجیتال: )5-14 بعد از آشکارسازی سیگنال توسط کنسول آنالوگ سیگنال های باند پایه )
Bpvideo , m/n.به کنسول اصلی دیجیتال تحویل داده می شود )
طبقه ی اصلی می باشد:3 دارای DMCکمسول
Signal و آنتن در طبقه ی تطبیق سیگنال )ARC و DMCمدارهای رابط .1
Conditioning Stage( یا )SCSتعبیه شده اند. و ظیفه ی این طبقه ی ) و سیگنالARCآماده سازی و تطبیق سیگنال های مختلف دریافتی از
جهت کارت های پردازشگر سیگنال )IFFهای آنتن فرستنده و سیگنال DSP( و کارت زاویه و )A/D.می باشد )
153

( یا )IPC رادار در طبقه ی کامپیوتر صنعتی )Master Monitoringبرنامه .2industrial personal computer.اجرا می شود )
در اینDSP کارت پردازشگر 3 و XANG و کارت AIBهمچنین کارت های طبقه وجود دارند.
را بر عهدهSCSتولید ولتاژهای الزم برای تغذیه ی واحدهای طبقه ی .3دارد.
DMC
Signal conditioning
stage (SCS)
Indusrial personel
computer (IPC)
Power soply
A/D( بعد از انجام اصالحاتی با استفاده از کارت های BP.V باند پایه )DMCدر
به کلمات دیجیتال تبدیل شده و به همراه سیگنال دیجیتال توسط کارت ( قرار می گیرد.DSB در اختیار کارت های پردازشگر دیجیتال ) AIBواسط
MTI با انتگرال گیری هم فاز و غیر هم فاز و اعمال فیلتر DSBدر کارت های
بر روی سیگنال های دیجیتال شده اثرهای مربوط به نویز و هدف های ساکن ) کالتر ( و یا با سرعت کم و حجر و تداخل فرکانس های رادیویی حذف شده
و احتمال آشکارسازی اهداف متحرک باال می رود.
در اختیار برنامه رادار که درDSPنهایتا داده های پردازش شده در کارت های کامپیوتر اجرا می شود داده می شود . برنامه رادار با پردازش کارت های
DSPو مقایسه ی سیگنال های نهایی مربوط به هر سلول تفکیک فاصله با یک 154

سطح آستانه ی وقفی اقدام به نمایش اطالعات بر روی صفحه ی مانیتورکامپیوتر می کند.
Radar dataدر این برنامه همچنین بخشی به نام پردازش داده های رادار )
processing( یا )Ads جهت اخراج اطالعات اهداف متحرک و )Trackکردن آن ها دریافتی ازm/nوجود دارد اطالعات پردازش شده در کامپیوتر با سیگنال
ارسال می گردد.PPI ترکیب شده جهت نمایش به صفحه ی ARCکنسول
به قرار زیر است:DMCبرخی از ویژگی ها و قابلیت های
, Fitering , integrationامکان انجام انواع پردازش روی سیگنال دریافتی /-1
cancelation , MTI , C Farو ... و کال انتخاب مجموعه ای از عملیات پردازش توسط اپراتور
سیستم گرافیکی جهت نمایش کلیه ی اطالعات خام و پردازش شده ی-2 در وضعیت های مختلفmenuرادار با امکانات وسیع نمایشی به شکل
قدرت تفکیک ( وRemoteامکان ارسال و دریافت اطالعات رادار بین سایت های دور )-3
( و امکان تشکیل شبکه های راداریlocalایستگاه های نزدیک ) PPIقابلیت شبیه سازی صفحه ی مانیتور به جای -4PPIقابلیت ارتباط با صفحه ی مانیتور -5
و ذخیره ی اطالعات راداری روی دیسکDato Logingامکان گسترده ی -6و یا چاپ اطالعات.
(DSC- کنسول فرعی دیجیتال: )5-15 درDMC( با LNA در اتاق عملیات از طریق شبکه ی محلی )Slaveکنسول های
ارتباط هستند. این کنسول ها فقط شامل طبقه ی کامپیوتر می باشند که مانیتورینگ رادار بر روی این کامپیوتر اجرا می شود.slaveبرنامه ی
DSC وظیفه ی نمایش داده های دریافتی از DMCرا بر عهده دارد و با نصبModemدر این منسول می توان به وسیله ی خط تلفن و یا خطوط مستقیم
155

leased line داده های دریافتی از DMC( را به کنسول راه دور رادار DRC) مخابره نمود.
ARC وDMC ورودی کنسول های ACتابلوی تقسیم برق: در این تابلو برق
تقسیم و کنترل می شود.
(DRC- کنسول راه دور رادار : )5-16 کنسول راه دور رادار در اصل یک کامپیوتری است که توسط دستگاه مودم و
گیرنده ی رادار ارتباط برقرارDSC مخصوص با کنسول monitoringبرنامه ی می نماید.
مشخصات فنی گیرنده رادار ناظر:
مشخصات عمومی: مشخصاتی از قبیل پوشش در برد ، ارتفاع ، زاویه ی سمت ، زاویه ی ارتفاع ، بیم آنتن، توان تشعشعی فرستنده تابعی از
مشخصات فرستنده ی و آنتن می باشد و گیرنده تأثیر چندی نیز روی آنندارد.
درجه ) بر اساس مشخصات2دقت آشکارسازی در این نوع رادار .1فرستنده (
m 750 ( و μ sec 2 ) برای پهنای پالس 300mدقت آشکارسازی در برد .2
(μ sec 6)برای پهنای پالس FAR = 10-9احتمال آژیر خطر .3
%90احتمال آشکارسازی .4
- سیگنال های درایو فرستنده :5-17فرکانس موج حامل قابل انتخاب-1 قابل انتخابStaloفرکانس -2پهنای پالس -3نرخ تکرار پالس -4نرخ تغییر -5
امکان انتخاب دو به صورت دستی 156

امکان انتخاب به صورت متغیر
پالس 16 پالس یا 8 پالس ، 4داخلی: تغییر به ازای هر دو پالس ،
خارجی: تغییر به صورت اسکن به اسکن
- مشخصات فنی قسمت آنالوگ گیرنده:5-18( Minimum Detectible Signalحساسیت گیرنده ).1
dbm 117قسمت زمان-ا. dbm 115قسمت -ب.
RF : 2 db( LNAدر ابتدا قسمت )
عدد نویز .2db 4در کل گیرنده :
(RAWنرمال )
MTIآشکارسازی : .3لگاریتمی
RF : 15 dbبهره ) گین ( قسمت .4 db 50ضریب بهبودی : .5
500 KHzNarrow band)باند باریک(
پهنای باند :.68.5 MHzWide band)باند پهن(
و قابل تنظیمdb 180بهره : .7 IF : 30MHzفرکانس .8 log , m/nسیستم جنگ الکترونیک:.9
DSP و کارت های مخصوص pcنوع:
بیتی قابل انتخاب9 بیتی یا A/D : 8پردازشگر: .10
157
تعداد پالس های مورد پردازش انتخابی و به طور12معمول
CFARسطح آستانه ثبت یا سطح آستانه وقفی : یا اتوماتیک
MTI سه پالسه :
TWSردیابی :
تحت تعقیب: در هر لحظه بیشهدف هایتعداد هدف50از
هدف50مشخصات حرکتی هدف برای هر
،MTIامکان نمایش سیگنال های ویدیویی / IFFنرمال ،
امکان انتخاب مجموعه ای از عملیات پردازش توسط اپراتور.11امکان ارسال و دریافت اطالعات رادار.12امکان ذخیره اطالعات و چاپ آن ها.13امکان گیت کردن ویدیوها.14Super VGAنوع مانیتور به کار رفته در رادار .15
امکان عالمت گذاری اهداف در مناطق حساس.16 انجام عملیات توسط اپراتور به وسیله ی صفحه کلید و ماوس قابل.17
انجام است. سوال امتحانی/ سطح آستانه چیست؟ ) تعریف به طور کلی( و در رادار ناظر
بر چند نوع است؟
- مشخصات سیستم برق مورد استفاده:5-19220V , 50Hzبرق مصرفی گیرنده
گیرنده:RFبخش
158

( ، فیلتر میانگذر )LNA واحد ، تقویت کننده ی کم نویز )3این این بخش از band pass filter و )Mixer.گیرنده ) مخلوط کننده ( تشکیل شده است
از آن جایی که امواج برگشتی از اهداف بسیار ضعیف و نویزی می باشند متصلDoplexor برای کنترل عدد نویز گیرنده مستقیما به RFمجموعه ی بخش
می شود.
رادار ناظر را نشان می دهد.RFشکل فوق بلوک دیاگرام کلی بخش
1-Mixer سیگنال خروجی فیلتر میان گذر به مدار ورودی : RFمیکسر ( متصل گردیده است.j2گیرنده )
( جهت کاهش تأثیرMixerتوضیح این که : مجموعه ی این مدار ) مدار امواج ناخواسته بر روی آن در یک جعبه ی آلومینیومی ضخیم وجود دارد.
و پیش تقویت کنندهRF مدار پیش تقویت کننده ی 3 گیرنده از Mixerمدار تشکیل شده است.IFی
در مدار مخلوط کننده با سیگنالG4 پس از تقویت در RFسیگنال ورودی که ازsignal generator � RF( که از طبقه ی Local Osilatorنوسان ساز محلی )
منتقل شده ،RF به بخش RF( توسط کابل ARCکنسول آنالگ گیرنده ) مخلوط می شود و پس از تقویت و عبور از فیلتر میانگذاری که فرکانس
به ورودیVc1 تنظیم شده است توسط IFمرکزی آن بر روی فرکانس رسیده و پس از تقویت نهایتا سیگنالIF( V1مدار پیش تقویت کننده ی )
IF( به کنسول آنالوگ گیرنده ARC.ارسال می شود )
می باشد.db 40 گیرنده در مجموع Mixer- ضریب تقویت 5-20 Stalo یا نوسان ساز محلی ( که از خروجی مدار local osilator ) Loسیگنال
) که درV5 وارد می شود پس از تقویت توسط واحد RFکه به بخش V2 )Mixer را حذف نمود( به مدار )V5صورت عدم نیاز می توان واحد
وارد می شود.
159

می باشد و از طبقهMixer ، +15V-DCتوضیح این که: ولتاژ تغذیه برای مدار بهRegolator تأمین می گردد و در داخل مدار توسط ARCی منبع تغذیه ی
12v-dc.تثبیت می گردد
( :LNAتقویت کننده ی کم نویز )-2 این مدار نیز جهت کاهش اثر تداخلی سیگنال های محی در یک جعیه ی آلومینیومی ضخیم قرار گرفته است ) یک جعبه ی مکعب مستطیل به
اندازه یک قوطی کبریت بزرگ(
� ولتاژ تشکیل شده است خود مدارRegolator و RF مدار ، 2 از LNAمدار RF بخش است که عبارت است از:3 متشکل از
مدار تطبیق ورودیا.مدار تطبیق خروجیب.یک تقویت کننده ی ترانزیستوریج.
خازنMicro Strip � 50Ωمدار تطبیق ورودی و خروجی متشکل از خطوط جهت تنظیم پارامترهای تقویت کنندهGigatr ( Vc2 , Vc1های تریمر از نوع )
می باشد.
از توانزیستور ماسفت گالی ام آرسنایدLNAدر ساخت تقویت کننده ی استفاده شده است.
ARC که از بخش منبع تغذیه ی 15V-DC ولتاژ LNAولتاژ تغذیه ی ورودی
تأمین می شود.
� تغذیه دارد که دامنه ی ولتاژRegolator نیز یک طبقه ی LNAدر داخل تنظیم می شود.VR1توسط مقاومت متغیر Regolatorخروجی
فقط در محل تولید سیستم توسطVR1 و VC1 ، VC2توضیح مهم: تنظیم تجهیزات مناسب انجام می گیرد.
160

و عدد نویز کمترdb 15در صورت تنظیم مدار بهره ی کل گیرنده بیش از حاصل خواهدGHz 1.3 در طول فرکانس MHz 100 پهنای باند db 2از
شد.
3-Band apss Filter:)فیلتر میانگذر ( طبقه ساخته4 � دو میله ای می باشد و در inter Digitalاین فیلتر از نوع
شده که فرکانس مرکزی و پهنای باند هریک از طبقات توسط میله هایتعبیه شده در آن تنظیم می گردد.
.انتخاب هر فیلتر بر مبنای فرکانس کار رادار می باشد 100 فیلتر حدود 4پهنای باند مجموعه ی MHzو در محدوده ی
پهنای باند اصلی¼فرکانس کار رادار می باشد که هر کدام از فیلتر ها را می پوشاند.
2تلفات جایگزینی این فیلترها حدودdb .است نمونه سوال: عرض باند فیلترها
میله ای2مشخصات فیلترهای میان گذر
فرکانسپهنای باندمحدوده فرکانس تحت پوششمرکز
فیلتر
1250.5 ≤ F ≤ 1272.5 MHz29 MHz1265 MHzفیلتر اول
1270.5 ≤ F ≤ 1304.5 MHz29 MHz1290 MHzفیلتر دوم
1300.5 ≤ F ≤ 1322.5 MHz29 MHz1315 MHzفیلتر سوم
1325.5 ≤ F ≤ 1354.5 MHz29 MHz1340 MHzفیلتر چهارم
( :ARC- کنسول آنالوگ گیرنده )5-21وظایف این کنسول عبارت است از :
161

گیرندهRF تولید شده در بخش IFتقویت و آشکارسازی سیگنال (1 وPPI ها ( جهت نمایش روی Videoایجاد انواع سیگنال های باند پایه ) (2
جهت انجام پردازش دیجیتالی DMCیا ارسال به کنسول ، ARC ، DMC برای بخش های مختلف کنسول Triggerتولید سیگنال های (3
PPIفرستنده و اتاق عملیات و ارتفاع یاب ، فرستندهRF مورد نیاز بخش RFتولید سیگنال مورد نیاز (4
ARC
منبع تغذیه
مولد تریگر سیگنالراه انداز فرستنده
RFسیگنال ژنراتور
تولید ویدیو
مولد های و سیگنال های راه انداز فرستنده:
( عبارت است از :Triggerواحد موجود در این طبقه ) مولد
Trigger Generator Unit ) واحد مولد تریگر (TGUواحد أ.
Coho Switch Unit ) واحد سوئیچ کوهو (CSUواحد ب.
واحد میکر فرستنده و فیلترهایت.مربوطه
Mixer & Amp Unit
TriggerTrigger Amplifier Unitواحد تقویت کننده ی ث.
Frequency Meter Unitواحد فرکانس میترج.
وTrigger : یکی از مهم ترین قسمت های طبقه ی مولد TGUواحد أ.سیگنال های راه انداز فرستنده است.
162
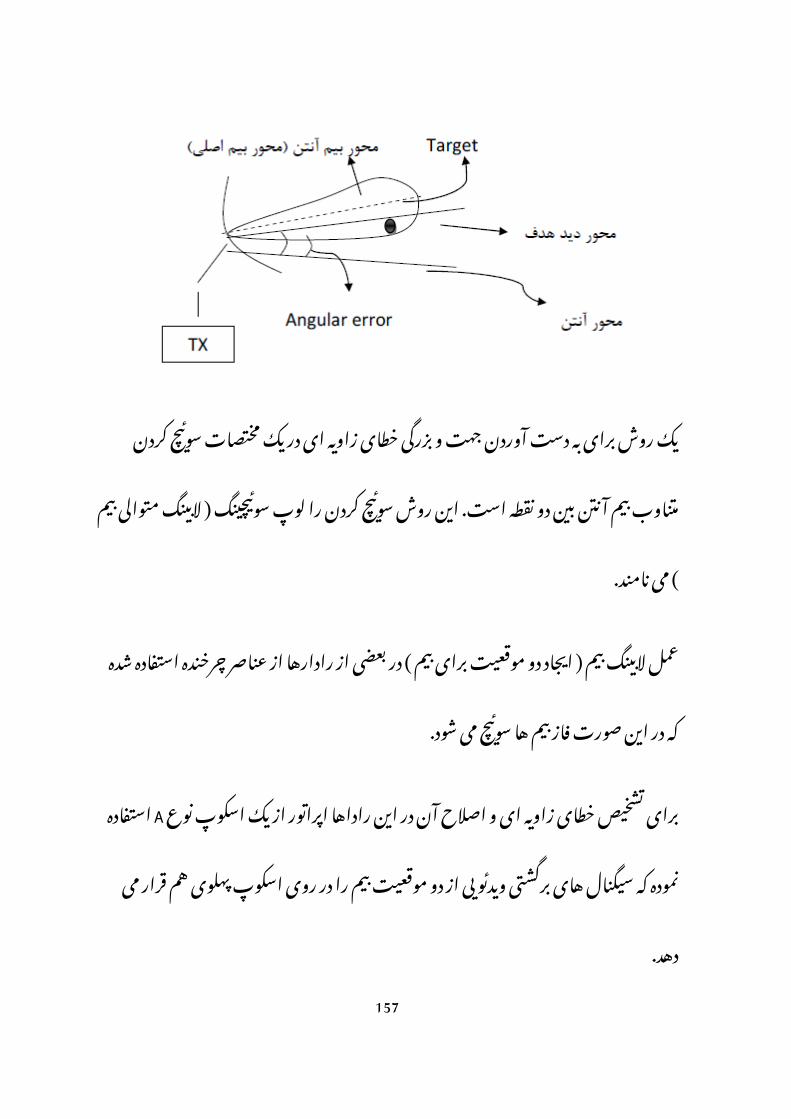
( ازMHz 30این واحد یا دریافت سیگنال مرجع سینوسی ) حدود T0 و T0 ، T1 ، T2 ، T3اسیالتور و تریگرهای
Tرا با زمان های مورد نیاز برای ، سیستم مدوالتور فرستنده ،IFF ، سیستم ARC ، DMCواحدهای مختلف
( ارتفاع یاب تولید می کند.HF و )PPIنمایشگر
قسمت های زیر وجود دارد.Power AmpiFireتوضیح این که در قسمت
کالسیترون .1فوکوس کوئل.2پالس ترانس .3ترانس فیالمان.4سیستم نشان دهنده ی حرارت.5سیستم نشان دهنده ی فشار هوا.6سیستم منابع تغذیه ی فوکوس کوئل.7
High یا High Voltageدو نوع فرستنده در سیستم های راداری وجود دارد
Carrent عدد 20 ) جریان باال( که در آن معموال PEN.وجود دارد
، رادارهای کرج ، هاشم آباد ، گنو ، بهبهانjy14.ها جریان باال هستند رادارهای کرند ، بجنورد ، قلعه مرغی و دزفول از نوعjy14.هستند
High Voltage.ها معموال تایراترون دارند
کار با مدوالتور بسیار سخت می باشد هنگام کار با این سیستم حتما آن را دشارژ کنید و حتما تنها کار نکنید و خلباصه کار کردن با
ر بسیار سخت و خطرناک است حتما طبق دستورالعمل ) کارت ها( کار کنید.
به عنوانTrigger ، T0( : این واحد با استفاده از CSUواحد سوئیچ کوهو )ب. های فرستنده راMixerکنترل ، عمل سوئیچ سیگنال کوهو به یکی از
راه انداز فرستنده فقط درRFانجام می دهد. از آن جایی که سیگنال مدت زمان ارسال یعنی در زمان روشن شدن المپ خروجی فرستنده
فرستنده هم در همان زمان روشن می گردد.Mixerباید فعال باشد لذا 163

توانStalo که به نسبت سیگنال Cohoبرای این منظور سیگنال ورودی سوئیچ می شود.Cohoبیشتری دارد توسط واحد سوئیچ
مدار مجزا تشکیل شده است.2 فرستنده: این واحد از Mixerواحد ت. فرستنده و دیگری تقویت کننده درایو. این دو مدار در یکMixerیکی
Box.قرار گرفته اند
: این واحد برای قسمت های مختلف مانندTriggerواحد تقویت کننده ی ث.IFF ، ارتفاع ، PPI.تقویت های الزم را انجام می دهد
مورد نیازRF : این طبقه وظیفه ی تأمین سیگنال RFواحد سیگنال ژنراتور برای ارسال به المپdriver گیرنده و همچنین تولید سیگنال RFبخش
کالسیترون ره به عهده دارد.
این طبقه از اجزاءزیر تشکیل شده است.
واحدSyentisizer
ضرب کننده های فرکانس کنترل بهر ی اتوماتیکRF(RF Automatic gain control) واحد تقسیم کننده ی توانRF(RF – Divider – Amp ) ( واحد رابط صفحه کلیدKeyboard Interface) اسیالتورCoho
164

تشکیل می دهند که ویژگیStaloبخش اعظم این طبقه را مدارهای مرتبط آن ها عبارت است از:
Stalo : 1220 – 1320 MHzکل باند فرکانسی .1
از خلوص باالیی برخوردار استStaloتوضیح اینکه: سیگنال خروجی .2 ) سیستم ناپایدار نیست ( و مولفه های فرکانسی مزاحم و نویز حدااقل
زیر مولفه های اصلی است.
فرکانس های تولیدی ، پایداری باالیی دارند..3 در فرکانس های مختلف تا حد ممکن مساوی میStaloتوان خروجی .4
باشد.
: مدار ساینتی سایزر یا به صورت بانک فیلتر کریستالیsyentisizerواحد أ. یا حلقه ی قفل فاز ( قابل پیادهPhase lock lop ) PLLو یا به صورت
سازی است. در صورت استفاده از ساینتر سایزر کریستالی فرکانس خروجی
خواهد بود.20 MHz( MHz 20.6 – 19.1ساینتی سایزر حدود )
فرکانس خروجی ساینتیPLLدر صورت استفاده از ساینتی سایزر ( خواهد بود.MHz 38.18 - 41.24سایزر حدود )
165

مرجع زمانی فرکانس های تولید از اسیالتورPLLدر ساینتی سایزر Cohoگرفته می شود ولی د ر ساینتی سایزر کریستالی فرکانس های
تولید توسط بانک کریستال موجود در مدار تولید می شود.
ضرب کننده ها: جهت انتقال سیگنال خروجی مدار ساینتی سایزر بهب. ( برحسب نوع ساینتیL ) باند Staloحوالی فرکانس مطلوب خروجی
Inter مجموعه ی ضرب کننده و یک فیلتر 3 یا 2سایزر مورد استفاده از
Digital.استفاده می شود ضرب کننده ی اول : این مدار با ضرب فرکانس سیگنال ورودی که.1
( می باشد یک موج سینوسی باMHz 20.6 – 19.1در محدوده ی )( تولید می کند.MHz 41.2 – 38.2فرکانس )
ضرب کننده ی دوم :.2و ... .
: در صورت استفاده از ساینتی سایزرRFکنترل بهره اتوماتیک ج. در فرکانسStaloکریستالی به منظور جبران تغییرات توان خروجی
از یک واحد کنترل اتوماتیکinter digitalهای مختلف در خروجی فیلتر ( استفاده می شود.AGCبهره )
توضیح این که : این بهره برای یک مقدار معین تنظیم می شود.
از قسمتRFواحد تقسیم کننده ی توان: این واحد با دیافت سیگنال ح.RF AGC یا فیلتر ( Inter Digital در صورت استفاده از ساینتی سایزر PLL
( پس از تقویت به دو مسیر تقسیم و هدایت می شود: Mixer و اعمال به RF با توان زیاد جهت ارسال به بخش Hخروجی (1
L.Oگیرنده به عنوان سیگنال
Mixer ، سیگنال مورد نیاز H با توان کمتر از خروجی Lخروجی (2
( را فراهم می کند. T Mixerفرستنده ) واحد رابط با صفحه کلید: وظیفه ی واحد رابط با صفحه کلید عبارتخ.
است از :
166

( برای کنترل فرکانس تولیدی مدار ساینتیFSW ایجاد اعداد کنترلی )(1سایزر
در صورتRF - AGCایجاد اعداد کنترل الزم برای کنترل بهره ی مدار (2استفاده از ساینتی سایزر کریستالی
( که برUp / Downتوضیح این که : تغییر فرکانس توسط یک کلید دو حالته ) کنسول آنالوگ گیرنده قرار دارد انجام می گیرد.Indicate Panelروی
بیت دیگر3 و syentisizerخروجی این واحد ) واحد رابط صفحه کلید ( برای استفاده می شود.RF – AGCآن جهت مدار
تولید سیگنال سینوسی باCoho : وظیفه ی اسیالتور Cohoاسیالتور د.( و با نویز فاز کم می باشد.MHz 30فرکانس کامال ثابت )
سیگنال خروجی این واحد به واحدهای زیر ارسال می گردد:
به عنوان سیگنال مرجع به واحد آشکارساز فاز .1(CSU سوئیچ )Cohoبه واحد .2syentisizer در صورت استفاده از TGUبه واحد.3
4.PLL از Coho 30 یک خروجی MHz جهت سنکرون کردن فرکانس stalo
ارسال می گردد.syentisizerبه قسمت گیرندهRF( دریافت شده از بخش IF : سیگنال باند میانی )Videoطبقه ی
مسیر مستقیم و با روش های مختلف آشکارسازی3 به Videoدر طبقه ی می گردد.
عمل تقویت و آشکارسازی صورت میif بر روی سیگنال logدر مسیر أ. می باشد. این سیگنالlog videoگیرد که خرویجی این مسیر سیگنال
Anti برای jammer و همچنین در مواقع وجود PPIبرای نمایش بر روی
Jamming.مفید می باشد عمل محدود کردن دامنه وIF بر روی سیگنالMTIدر مسیر ب.
آشکارسازی فاز صورت می گیرد.
167

خروجی این مسیر یک سیگنال ویدیویی دو قطبی در باند پایه با دامنه ی ( میDMC که کنسول اصلی دیجیتال )A/Dمناسب جهت اعمال به مدار
باشد.
سیگنال دیگر ،4در این مسیر سیگنال دو قطبی آشکاسازی شده به Unipolar ، digitized ، m/n Analog و m/n Digitalتبدیل می شود جهت تست و
ساخته می شود.DMCاستفاده به کنسول
عبارت است از:Videoواحد های مختلف موجود در طبقه ی
IFIF Divider Unitواحد تقسیم کننده ی توان .1
STCSTC Generatorواحد مبدل .2
آشکارساز و تقویت کننده ی.3لگاریتیمی
Log AmplFire & Detector
Limiter – (LIM)محدود کننده.4
Phase Detectorآشکارساز فاز.5
LPFفیلتر پایین گذر.6
Analog Processing Unit پردازشگر آنالوگ.7
m/nm/n Processing Unitپردازشگر .8
: به منظور کاهش اثر نویز و تداخل های پالسی غیر سنکرون )m/nپردازشگر استفادهm/nجمر( در خروجی پردازشگر آنالوگ از یک مدار به نام پردازشگر
می گردد.
از واحد پردازشگر آنالوگ ،Signal Digitizeورودی های مدار عبارت است از : وTGU از واحد RF( T1 ، سیگنال )TFU از واحد MHz 1سیگنال پالس ساعت
12V و +5Vولتاژهای تغذیه ی +
دیجیتال میm/n آنالوگ و m/nخروجی این مدار عبارت است از: دو سیگنال آنالوگ در اصل یک سیگنال آنالوگ چند سطحی استm/nباشد که خروجی
168
PPI( با سیگنال خروجی کارت DMC واقع در کنسول دیجیتال )VCUکه در واحد
ترکیب می شود. PPIجهت ارسال به
نوع پردازش و یا به بیان دیگر تعداد پالس هایی که به ازای آن در خروجس (Jumper باشد که توسط )10 از 3 یا 10 از 2اعالم هدف می شود ، می تواند
جامپری در داخل مدار قابل تنظیم است.
اگر تعداد پاس های بازگشتی متناظر در10 از 3به عنوان مثال / در حالت یک سلول خاص سه عدد یا بیشتر باند مدار اعالم هدف می کند ) در اکثر
تنظیم می شود.10 از 3مواقع کار مدار در وضعیت
limiterوظیفه ی این واحد فیلتر کردن سیگنال های آشکار شده در باند پایه : به منظور کاهش توان نویز می باشد. این مدار دارای دو بخش کامال مجزا
است:
بخش اول: مداری که شامل یک فیلتر پایین گذر و بافر است که جهت فیلتر کردن و تقویت سیگنال خروجی واحد آشکارساز فاز استفاده می شود. و خروجی این قسمت به عنوان یک سیگنال دو قطبی به پتانسیو
اعمال می شود و پس از تنظیم دامنه به حداکثرPHDمتر در قسمت ولت به عنوان سیگنال ویدیو جهت ارسال به کنسول الی دیجیتال1±
داده می شود.بخش دوم: ورودی بخش دوم مدار که شامل یک فیلتر پایین گذر ، بافر
و یک درایور خط می باشد سیگنال خروجی واحد آشکارساز فاز و می باشد. این سیگنال بعد از ویدیوهایLDUتقویت کننده ی لگاریتمی
ارسال می شود. پهنای باند فیلترهای پایینPPI به log videoلگاریتمی گذرترین واحد متناسب با عکس پهنای پالس ارسالی انتخاب و تنظیم
BF= 120 KHz پهنای باند فیلتر Z = 6 μ sec(. در صورتی که Z/1می شود)
است.1 ≤ z ≤ 20 m Hz1/20 ≤ BF ≤ 1 m Hz
محاسبه ی حساسیت گیرنده: 169

1عدد نویز = /θ × 1/Ca
174 + NF + 10 log bw = MDS₋
10 + 4 + 174مثال/ - log 107 = -174 + 4 + 70 = 100
10 + 4 + 174مثال/ - log 300 × 103 = -174 + 4 + 10 (log 3 + log 5)
= -174 + 4 + 10 ( 0.47712 + 5)
= -174 + 4 + 55
( :DMC- کنسول دیجیتالی )5-22 بعد از آشکارسازی سیگنال های برگشتی رادار توسط کنسول آنالوگ گیرنده
(ARC ( سیگنال های باند پایه )Video خروجی واحد : ) ها LPFو یا خروجی Bipolar مربوط به پردازشگر آنالوگ سیگنال m/n Analog و سیگنال Digitizeبه
تحویل داده می شوند.DMCکنسول
عبارت است از:DMCو دیگر ورودی های کنسول
TGU از واحد T1( PRFسیگنال تریگر ).1
از واحد شناساییIFFسیگنال .2 در سیستم آنتنShafting Coder از ACP و ARPسیگنال .3
را می توان به شرح زیر خالصه نمود:DMCوظایف اصلی کنسول
دریافت سیگنال های الزم و اصالح آن ها جهت مراحل بعدی ) سیگنال.1ویدیویی و سیگنال های کنترل(
و استخراجData Position های آماده شده در بخش DATAپردازش .2اطالعات هدف:
به منظورDSPدر این مرحله توسط نرم افزارهای موجود در کارت های حذف کالتر ، کاهش از نویز و تداخل بر روی سیگنال های ویدیویی یک سری پردازش انجام می شود. بعد از انجام پردازش اولیه ی داده های
در اختیار برنامه ی رادار در کامپیوتر )DSPپردازش شده در کارت های PC.قرار می گیرد )
170

CFARدر این برنامه ضمن تکمیل پردازش داده ها و انجام پردازش های
داده های نهایی مربوط به هر سلول تفکیک فاصله با یک سطح آستانه یوقفی مقایسه شده و اعالم هدف می گردد.
توضیح این که برنامه ی رادار جهت استخراج اطالعات اهداف متحرک( نیز وجود دارد.RDPبخش پردازش داده های رادار )
نمایش اطالعات پردازش شده : .3 (PC می رود و هم در مانیتور کامپیوتر )PPIاطالعات پردازش شده هم به
نمایش داده می شود.
از طریق شبکه کنسولslaveمخابره ی اطالعات نمایشی به کنسول .4DMC طبقه است:3 دارای
طبقه ی منبع تغذیه -1(signal conditional stage (SCS)طبقه ی تطبیق سیگنال )-2طبقه ی کامپیوتر صنعتی-3
( :SCS- طبقه ی تطبیق سیگنال )5-23 وظیفه ی این طبقه آماده سازی و اصالح سیگنال های مختلف دریافتی از
X جهت استفاده در کارت های IFFکنسول آنالوگ ، آنتن ، فرستنده و سیستم
Angle , AIB , DSP , A/Dمی باشد . که این طبقه از قسمت های زیر تشکیل شده است:
PCU(Pulls conditioning unit)واحد اصالح پالس-
واحد تبدیل سریال به-موازی
SPU(Serial to parallel unit)
واحد تبدیل آنالوگ به-دیجیتال
A/D
VCU(Video conditioning unit)واحد ترکیب ویدیو-
SDU(Signal distribution unit)واحد توزیع سیگنال-
171

LAU(Level & attenutted unit)واحد اصالح دامنه-
بخش تشکیل شده است:2( : این طبقه از IPCطبقه ی کامپیوتر صنعتی )
( بخش اول یک کامپیوترPCکه با استاندارهای صنعتی طراحی شده ) است.
/ بخش دوم تشکیل از کارت های سخت افزاریAIB ، XAng ، DSPبا Normal و PPI ، MTIنال های
از برنامه های ) اسمبلی ( یا زبان ماشینDSPتوضیح این که: کارت های شوند.DSP ، Loadاستفاده می کنند که این برنامه ها باید در کارت های
و برنامه یISA و BAS از طریق PCفرمان ها و کنترل های الزم بین کارت ها ، monitoring رادار رد و بدل می شوند و اطالعات زاویه از طریق BAS و ISAاز
توسط برنامه دریافت می گردد.X Angleکارت
:X Angle- کارت 5-24 باPCوظیفه ی این کارت دریافت اطالعات زاویه از آنتن و تحویل آن به
فرمت باینری است. این کارت به گونه ای طراحی شده است که قادر است نوع اطالعات ورودی از3با انواع اطالعات زاویه ای آنتن عمل کند. این کارت
بیتی دیجیتالی تبدیل می نماید.12انواع مختلف سیستم آنتن را به کلمات
نوع اطالعات عبارت است از:3این
(Resaltworورودی زایه به صورت کد )(1 بیتی Grray ( 12)ورودی زایه به صورت کد (2 به صورت )ARP ، ACPورودی زایه به صورت کد افزایشی یا (3
Incremental) بیتی باینری12 داده می شود به صورت یک عدد PCزاویه ی خروجی که به
( برLow beat بیتی )4( و High beat بیت )8است که در دو مرحله به صورت منتقل می شود.PC( به ISA , BASروی خطوط داده )
مشخص میPCنوع زاویه ی ورودی کارت به صورت یک فرمان به وسیله ی شود.
172

صورت می8151 توسط میکروپروسسور ISA و BASعمل نوشتن زاویه در گیرد.
در سیستمی که بر مبنای ورودی کد افزایشی عمل می کند ) سیستم شفتینگ مقدار زاویه را بهARP و ACP سیگنال 2کودر آنتن ( کارت زاویه با دریافت
دست می آورد.
:JY14- مشخصات رادار 5-25 بعدی است. یعنی مختصات هدف را از نظر فاصله3این رادار یک رادار
زاویه ی سمت و ارتفاع ارائه می دهد.
GHz 2.5 – 1.85محدوده ی فرکانس این رادار:
250 , 280, 350 به میزان PRF 3میزان : حدود
Rmax(unamb) = 0.15 × 1/ 350 = 0. 15 × 1/ 350 =
پا82000 یا 25kmحداکثر ارتفاع قابل کشف:
درجه360پوشش در زاویه ی افقی :
دور در دقیقه6گردش آنتن: فرستنده و یک گیرنده است.2این سیستم دارای
μ sec 20 × 2عرض پالس:آنتن از نظر شکل هندسی سهمی گون است.
11mطول محور آنتن:
14mارتفاع آنتن: کابین هم1 کابین گیرنده و 1 کابین فرستنده ، 2 کابین است) 4این رادار
اتاق عملیات است(نوع رادار : کالسیترونی
عدد9تعداد بیم : توضیح این که: رادار دارای عدد فیدهورن است که فیدهورنی درمقابل
reflectorبر روی یک و نحوه ی امواج درآن ها به صورتی است که اولین 173

می زند واین امواج ازreflectorفیدهورن امواج رادیویی را به قسمت باالی reflector راتشکیل می دهند.1 به سطح زمین منعکس و بیم
( امواج خود رابه پایین رفلکتورمی زند و ازآن جا به علت2و فیدهون نهم )باال )فضا( منتشر و بیم نهم را تشکیل می دهد.
تمامی سیگنال های و بیم دریک لوب در فضا روی هم سوار شده و یک بیم 20 تا 0باریک دریک جهت افق تشکیل می دهند که زاویه ی ارتفاع آن از
درجه است.
توضیح این که: اطالعات هدف رامی توان هم به صورت خودکار وهم بهصورت نیمه خودکار روی نشان دهنده استخراج نمود.
درصورتی که اختالالت جوی زیاد باشد روشن نیمه خودکارجهت استخراج اطالعات مناسب تر است به علت این که درصورت وجود کالتر یا نویز
می نماید.overloadسیستم را
:JY14تکنیک های مورد استفاده در رادار
می باشد.stcدارای سیستم .1 این مدار برای حذف کالترهای قوی زمینی و پدید ه های جوی به خصوص
کالترهای زمینی نزدیک به رادار استفاده می شود.
دارای مدار کنترل و باالنس بهره ی خودکار :.2174

جهت افزایش دقت عملPRTاین مدار بیم های مختلف رادار را در هر استخراج ارتفاع هدف باالنس می نماید.) تقسیم توان داخل بیم ها را
کنترل می کند(
دارای تکنیکی فشردگی پالس می باشد:.3 جهت افزایش دقت و تشخیص هواپیمایی که با فاصله ی کم پرواز می کند
فشرده می کند. و در مورد خنثی کردن اثر1μsecپالس ارسالی رادار را تا jamming .موثر است
است:Digital MTI( DMTIدارای سیستم ).4پردازش دیجیتالی تنها از یک کانال
رادار ملی به طور کامل در بابلسر و گرمی نصب می باشد و در پونل و انزلی هم وجود دارد ولی آن از یک رادار دیگر است.
تغییر فرکانس :.5 نقطه ی30 به کار می رود . دارای ECMاین تکنیک جهت مقابله با
MHz 10فرکانسی است ، به فاصله ی جانبی
می باشد.μsec 100حداکثر زمان الزم جهت تعویض فرکانس .6 :Frequency agilityدارای تکنیک .7
به کار می رود.ECMکه این تکنیک جهت مقابله با
( :clutter mapنقشه ی کالتر اتوماتیک ).8 می کند.MTIتنها قسمتی را که کالتر در آن وجود دارد
175
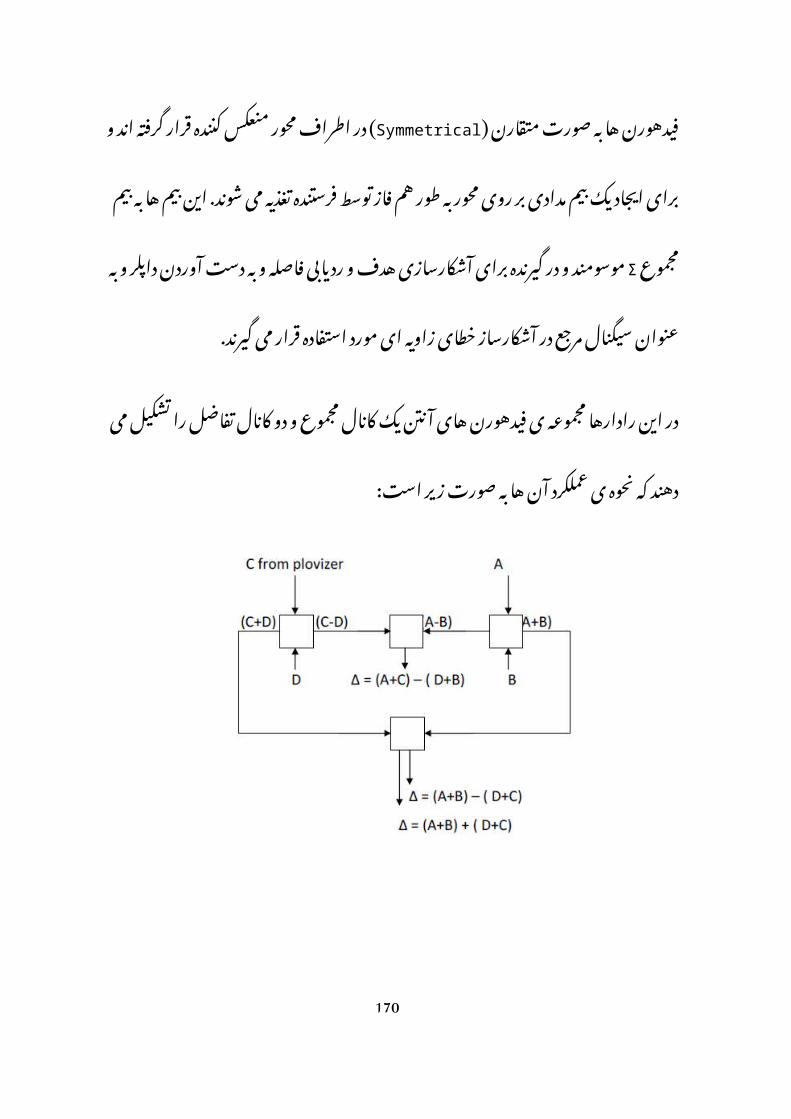
:CFAR ( Clutter false alarme razeمیزان ).9به طور دستی و و اتوماتیک قابل تنظیم است.
سیستم کنترل کننده ی نویز حرارتی :.10 را تغییر می دهد.Tresh holdنویز که باال رود
:j ATSدارای سیستم .11این سیستم با تجزیه و تحلیل اختالالت فرکانس سیستم را تغییر می دهد.
انجام میDicly Fixتوضیح این که این عمل را به وسیله ی گیرنده ی دهند.
حذف کننده ی هدف های ثابت:.12 این تکنیک اکوهای ثابت و متحرک را در هر دور آنتن با هم مطابقت داده و
مقایسه می کند و اکوهای ثابت را حذف و فقط سیگنال های هدف هایمتحرک را آشکارسازی می نماید. این تکنیک دارای خصوصیات زیر است:
اکوهایkm 200 داخل را شامل می شود. زیرا در باالی Km 200ا.ثابت بسیار کمتر است.
می باشند.MTI دارای 6 تا 1فقط بیم های ب.
176

درجه عمل می کند.360در تمامی ج.محاسبه ی ارتفاع در این رادار:.13
بعدی( به دست3اساس محاسبه ی ارتفاع هدف در رادارهای چند بیمه ) آوردن زاویه ی ارتفاع می باشد که در صورت به دست آوردن این زاویه
محاسبه می شود.Micro computerارتفاع هدف از طریق فرمول زیر توسط
h = R × Sin θ + ha × R2/2Kr ارتفاع هدف
R2ارتفاع انحنای کره ی زمین :
Krضریب شکست :
hatارتفاع آنتن از سطح دریا :
Sin θزاویه ی ارتفاع هدف :
Rفاصله ی هدف رادار:
( :ARM- تکنیک های ضد موشک های ضد رادار )5-26 روش برای مقابله با موشک های ضد رادار وجود دارد.J Y14 ، 2در رادار
صورت2اولین روش، روش قطع ارسال امواج راداری است. که به اتوماتیک و دستی انجام می شود.
دومین روش، روش استفاده ازDecoy می باشد که Decoyیک سیستم فریب دهنده است که به شرح زیر عمل می نماید:
177

رادارJ Y14 پا نمی تواند کار کند.7500 در ارتفاع بیش از 90اگر سرعت باد بیشتر از km.باشد نمی تواند کار کند درجه برسد نمی تواند کار کند.25% و دما به 90اگر رطوبت به
JY14دستورالعمل نگهداری و راه اندازی رادار
تهویه به نحو مطلوب کار کند.-1 22 – 18درجه حرارت بین C درجه15 ولی بهتر است در گیرنده
باشد.کلیه پرسنل رادار مسئولند به خصوص شیفت تهویه مسئول کنترل
آن می باشد. باشد.V 220مقدار ولتاژ ورودی کابین ها چک شود تا در حد نرمال -23-Miter.های ولتاژ یکه ی منابع تغذیه چک شود تا در حد نرمال باشد سوئیچ مربوط به همانS و چه باند Lدر هر باند فرکانسی چه باند-4
Transmitor. انتخاب شود فرکانس رادار باید ثابت باشد)تغییر نکند(-5 برای هر نوع کانال چک شود. در صورتFB و FA ها؛ Videoکلیه ی -6
چک شود.LNA( یا Fetنداشتن خروجی فت ) کلیه ی سوئیچ ها مناسب با موقعیت جوی انتخابDSP1در قسمت -7
شود.178
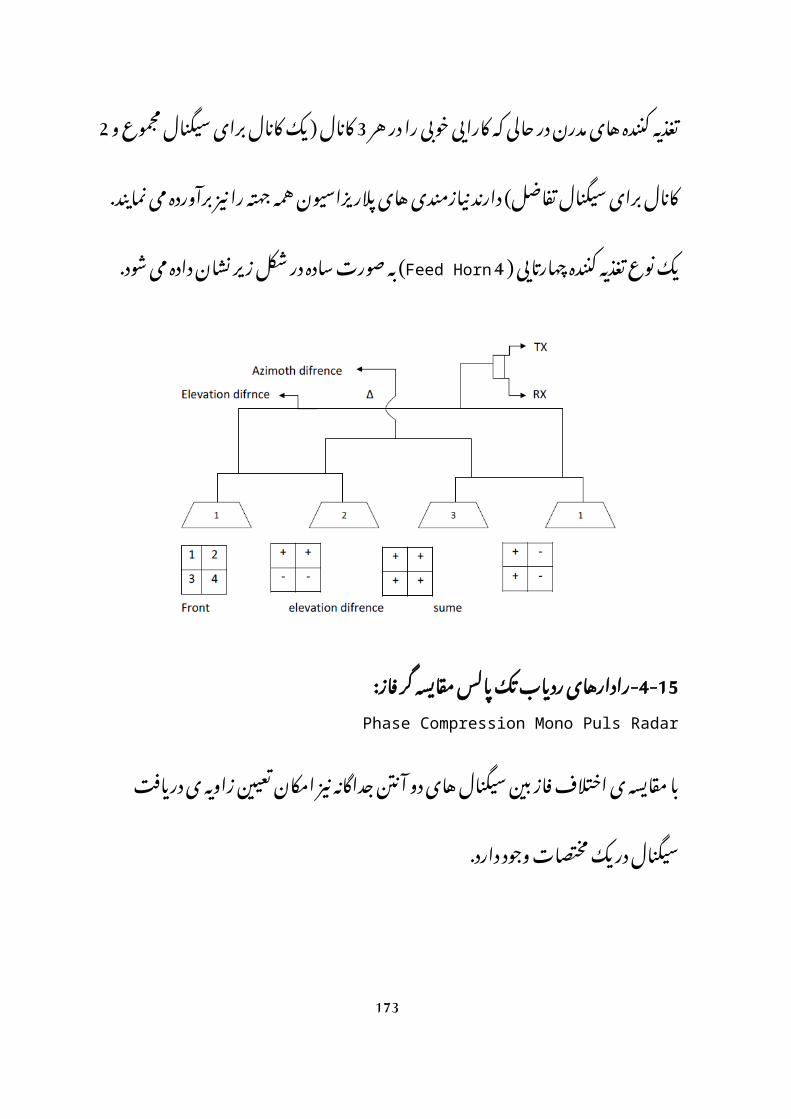
سعی شودPRF 280 استفاده شود چون بهترین PRFی که این رادار است.280می تواند کار کند
کلیه ی سوئیچ ها در وضعیت مناسب قرار گرفته باشند ) بعضی از سوئیچ ها چند وضعیتی هستند (
سعی شودMTI پالسه استفاده شود.3 در حالت ( توجه مهم: موقعی که می خواهید بردیbordرا بیرون بکشید چک )
خاموش باشد.power suplyکنید یکه ی سوئیچ ها در اختیارشما است و میlocalتوضیح این که در حالت
توانید رادار را در حالت نرمال داشته باشید.
باشد.MANسعی شود سوئیچ ها در حالت DSP2در قسمت -8 یا انتخاب فرکانسFB و FA باید سوئیچ انتخاب فرکانس Localدر صورت -9
یکی باشد.Frequency generatorیونیت اول oprate همیشه در حالت بیرون باشد یعنی روی operate & testسوئیچ -10
باشد. بستگی به شما دارد و وضعیت منطقه ، درwind offانتخاب سوئیچ -11
DSP1صورت وجود ابرهای متحرک از این سوئیچ استفاده شود و از
استفاده شود. را فشارL.P فرکانس را انتخاب نمودید سوئیچ Localهرگاه در حالت -12
دهید. چک شود از حد نرمال بیشترpower suply مقدار ولتاژX Tractorدر قسمت -13
نباشد. در حالت نرمال ، باید بیرون باشند.ARMکلیه ی سوئیچ به جز سوئیچ -14 )سوئیپ( به طور داخلیSwupدر صورتی که بخواهید از چرخش -15
استفاده نمایید.azimothاستفاده نمایید از سوئیپ در حالت برای فیلتر کالترهای روی اسکوپ در بیم های پایین ازARMسوئیچ های -16
می باشد.6 تا شماره 1
179

سوئیچ باید بیرونReset برای کامپیوترها می باشد و بعد از Resetسوئیچ -17باشد.
هنگام خاموش / روشن کردن احتیاط کامل نمائید. و بیPPIدر قسمت-18جهت کلیدها را دستکاری ننمایید.
استفاده ننمایید.Full Autoبه هیچ عنوان از کلید -19 ها را حتما خاموش نمائید.oscopهنگامی که آنتن خاموش است -20 ) گیرنده( در مورد خاموش / روشن کردن سیستم سوئیچ4در کابین -21
ها باید به ترتیب خاموش و روشن گردند. ) مثال اول فیالمان المپ و روشن شود.(High powerبعد
تهویه ی سیستم باید حتما کار کند ) در غیر این صورت فرستنده آنا می-22 است( High voltageسوزد چون
مقدار برق ورودی دقیق چک شود.-23ترتیب روشن کردن کلیدها و خاموش کردن آن ها را فراموش نکنید.-24به مقدار جریان فیالمان المپ را باال نبرید.-25
المپ را باال نبرید.powerبدون جهت
( المپ توجه نمائید.body carentبه جریان بدنه ی )-26Body corentبر اثر پرتاب الکترون هایی که متمرکز نمی شوند به وجود می
آید.
High voltage دیگر استفده کنید حتما Transmiterزمانی که می خواهید از -27
اگر خاموشvoltage را خاموش نمایید. در صورت باال بودنstandbyکانال می ترکد.High voltageنشود ترانس
گزارش شود.Qc ساعت یکبار وضعیت رادار را تست شود و به 1هر -28 وضعیت رادار را در وضعیت وقایع شیفت کامال به طور دقیق ثبت-29
نمایید.وضعیت تریگرهای شارژ و دشارژ را دقیقا چک نمایید-30 محدود16در قسمت مدوالتور حداقل تعداد مدوالتور در حالت کار -31
باشد.180

های در حالت کار اطالع داشته باشید که درtrigger Ampfireاز کلیه ی -32صورت خراب شدن بالفاصله تغییر یا جایگزین شود.
را چک نمایید وHigh voltage فاز در منبع تغذیه ی 3اطمینان از فیوزهای -33در صورت سوختن تعویض شود.
) جریان بدنه( نداشته باشند و در صورت داشتن عیبIB carentمدوالتور -34یابی شوند.
در صورت روشن شدن چراغ های قرمز باالی کابین فرستنده بالفاصله-35High voltage و trigger ها خاموش شوند سپس کلید ovor load.فشار دهید
) میلهshorting barهمیشه قبل از انجام کار روی مدوالتور به وسیله ی -36ای عصا مانند( کلیه ی مدوالتورها را خالی نمایید.
کلیه سیم ها و وایرهای داخل مدوالتور چک شود تا اتصال به بدنه-37نداشته باشد.
چک شود.peak inverce voltageکلیه ی دایودها و مقاومت های -38 بار چک شود.2مقدار آب مخزن هر روز -39اطمینان از کلیه ی شیلنگ های آب که نشتی نداشته باشد.-40 سلیکاژل پالس ترانس )رطوبت گیر پالس ترانس( چک شود تا رطوبت-41
داخل آن نرود.مقدار روغن پالس ترانس چک شود و کمبود آن جبران شود. -42
181