dokumentace imp
TRANSCRIPT

Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy
100
18-20-M/01 Informační technologie
Stavba kvadrokoptéry
Individuální praktická maturitní práce
Jičín 2015 Roman Auersvald
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy
100
18-20-M/01 Informační technologie
Roman Auersvald
Stavba kvadrokoptéry
Individuální praktická maturitní práce
Jičín 2015 Vedoucí individuální praktické maturitní práce
Mgr. Ing. Zdeněk Pokorný

Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
Prohlašuji, že jsem individuální praktickou maturitní práci zpracoval samostatně a
uvedl v ní všechny prameny, literaturu a ostatní zdroje, které jsem použil.
V Jičíně 26. února 2015 Vlastnoruční podpis žáka
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
Zadání
Obor vzdělávání: Informační technologie Číslo oboru: 18-20M/01
Zaměření: Informační technologie Třída: I4A
Školní rok: 2014-2015
Téma maturitní práce: Stavba kvadrokoptéry
Vedoucí maturitní práce: Mgr. Ing. Zdeněk Pokorný
Téma zpracuje žák: Roman Auersvald
Zadání maturitní práce: Realizujte sestavení kvadrokoptéry a navrhněte její další
možné rozšíření
Požadavky:
Komponenty
- rám kvadrokoptéry – přiměřeně velký pro instalaci komponent
- motory – schopny unést sestavu + náklad
- vrtule – dvě pravotočivé, dvě levotočivé
- regulátory otáček motoru – odpovídající typu motorů
- rozvodová deska
- řídící jednotka
- ovladač
- baterie
- vysílač
Zajištění letových funkcí (vzlet, přistání, ovladatelnost ve vzduchu,
možnost udržování výšky…)
Hmotnost sestavy – max. 2kg
Užitečná hmotnost – min. 1kg (zařízení je schopno unést těleso např.:
kameru o hmotnosti 1kg)
Oponent maturitní práce: Bc. František Kubín DiS Termín zadání maturitní práce: 17. 10. 2014
Kontrola rozpracovanosti dne: do 12. 12. 2014, do 30. 01. 2015
Termín odevzdání maturitní práce: 27. února 2015
Obhajoba maturitní práce dne:
.........................................
Podpis vedoucího práce
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
Obsah Úvod ........................................................................................................................................................ 1
Volba tématu ...................................................................................................................................... 1
Cíl práce ............................................................................................................................................... 1
Využití .................................................................................................................................................. 1
1 Přehled obecných parametrů a pojmů .......................................................................................... 2
1.1 Rám ......................................................................................................................................... 2
1.1.1 Aerial: .............................................................................................................................. 2
1.1.2 Sport: ............................................................................................................................... 2
1.1.3 Sport FPV: ........................................................................................................................ 2
1.1.4 Mini: ................................................................................................................................. 2
1.1.5 Mini FPV/Micro MHQ: ..................................................................................................... 2
1.2 Motory ..................................................................................................................................... 3
1.2.1 kV ..................................................................................................................................... 3
1.2.2 Max current ..................................................................................................................... 3
1.2.3 Tah ................................................................................................................................... 3
1.2.4 Hmotnost ......................................................................................................................... 3
1.2.5 Doporučené vrtule ........................................................................................................... 3
1.3 Regulátory (ESC- Electronic Speed Controller) ....................................................................... 4
1.3.1 Li-po ................................................................................................................................. 4
1.3.2 Maximální zatížení ........................................................................................................... 4
1.4 Baterie ..................................................................................................................................... 4
1.4.1 Kapacita ........................................................................................................................... 4
1.4.2 Počet článků .................................................................................................................... 4
1.4.3 C-rate ............................................................................................................................... 4
1.5 Vrtule ....................................................................................................................................... 5
1.6 Řídící deska (Flight controller) ................................................................................................ 5
1.6.1 DJI NAZA M V2 ................................................................................................................. 5
1.6.2 3DR Pixhawk .................................................................................................................... 6
1.6.3 Open Pilot CC3D .............................................................................................................. 6
2 Výběr komponent/stavba kvadrokoptéry ..................................................................................... 7
2.1 Výběr rámu.............................................................................................................................. 7
2.2 Výběr motorů .......................................................................................................................... 8
2.3 Výběr regulátorů ..................................................................................................................... 8
2.4 Výběr baterie .......................................................................................................................... 9
2.5 Výběr vrtulí .............................................................................................................................. 9
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
2.6 Výběr řídící desky .................................................................................................................. 10
3 Výběr ostatních komponent ......................................................................................................... 10
3.1 Rozvodová deska pro napájení ............................................................................................ 10
3.2 Konektory pro baterii ............................................................................................................ 10
3.3 Adaptéry pro motory a vrtule .............................................................................................. 11
3.4 Konektory pro regulátory a rozvodovou desku ................................................................... 11
3.5 Distanční sloupky velké ........................................................................................................ 11
3.6 Distanční sloupky malé ......................................................................................................... 11
3.7 Vysílač a přijímač .................................................................................................................. 12
4 Postup sestavení ........................................................................................................................... 13
4.1 Sestavení rámu ..................................................................................................................... 13
4.2 Připájení regulátorů na rozvodovou desku .......................................................................... 13
4.3 Umístění motorů a montáž nástavce pro vrtule .................................................................. 14
4.4 Umístění řídící desky ............................................................................................................. 15
4.5 Připojování přijímače k řídící desce ...................................................................................... 15
4.6 Nastavení řídící desky ........................................................................................................... 16
4.7 Pár tipů na závěr ................................................................................................................... 16
5 Další možná rozšíření .................................................................................................................... 17
Závěr ...................................................................................................................................................... 18
Přílohy ................................................................................................................................................... 19
Zdroje .................................................................................................................................................... 20
CD s přílohou ......................................................................................................................................... 21
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
1
Úvod
Volba tématu
Stavbu kvadrokoptéry jsem zvolil z důvodu vlastní zvědavosti. Byla to výzva, kterou jsem chtěl
pokořit a sestavit kvadrokoptéru, která se bude podobat standardům a vlastnostem kvadrokoptér, co
jsou několikanásobně dražší.
Cíl práce
Cílem práce bylo sestavit kvadrokoptéru z vhodných komponent, aby se vyrovnala sériově
vyráběným kvadrokoptérám ve stejné výbavě za “lidovou“ cenu.
Zároveň vypracování této práce, která by v budoucnu mohla pomoci ostatním, kteří budou
chtít sestavit vlastní kvadrokoptéru, nebo získat povědomí o tom, co je pro stavbu klíčové.
Využití
V současné době se kvadrokoptéry stávají čím dál tím více populárními. Nejsou to
pouze kvadrokoptéry, ale také drony obecně.
„Dron (někdy také UAV z anglického Unmanned Aerial Vehicle) je bezpilotní letoun,
zpravidla malých rozměrů. Bezpilotní letouny jsou řízené na dálku a používají se
např. k průzkumům terénu nebo k útočným účelům.“[13]
Využití kvadrokoptér je velice široké. Může plnit funkci jako pracovní pomůcka například pro
fotografy, kteří chtějí pořizovat fotky z „ptačí perspektivy“ nebo se dá využít pro dopravování zásilek,
jak už v dnešní době velké korporace testují (Google, Amazon) a jako koníček pro rekreační létání
nebo závody. Velké využití bezpilotních dronů je v posledních letech především v armádě ve funkci
průzkumníků nebo slouží pro monitorování bojové situace. Drony mohou sloužit i jako průzkumníci
v zamořených oblastech, kam by se člověk nedostal.
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
2
1 Přehled obecných parametrů a pojmů 1.1 Rám Vybírá se dle plánovaného využití sestavy.
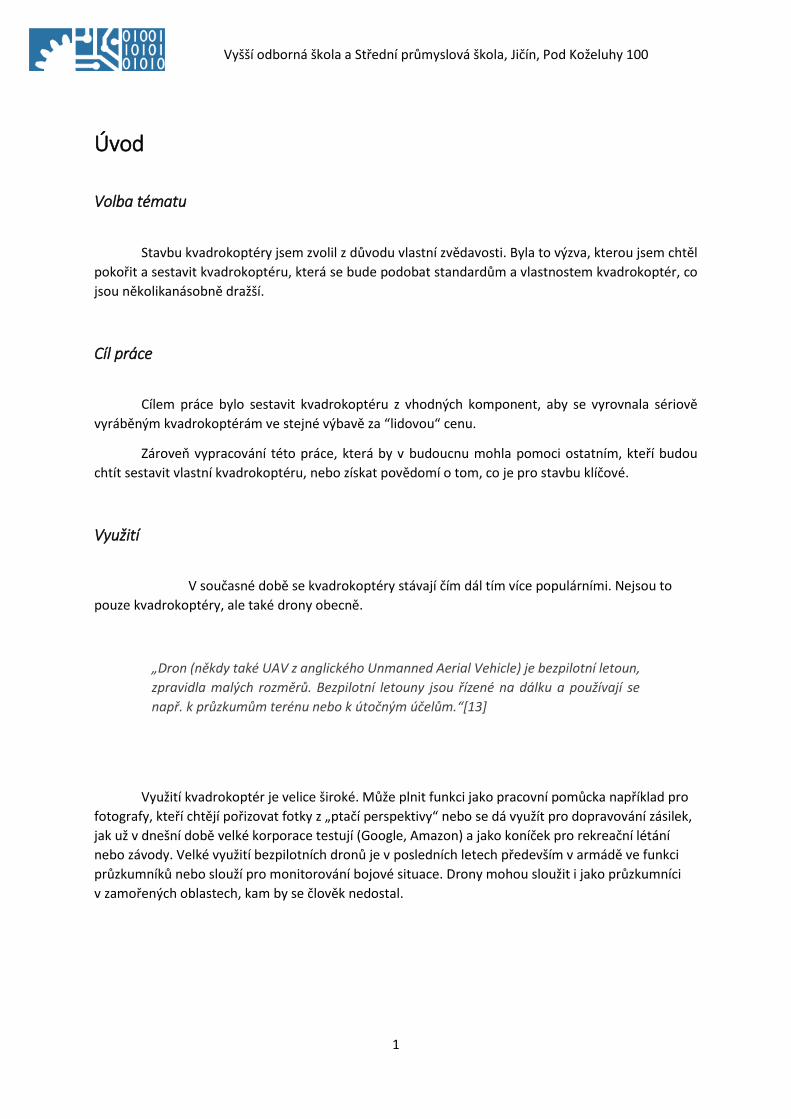
1.1.1 Aerial: (Obr. 1)
Využití pro profesionální natáčení videa / pořizování fotek.
Většinou rámy typu hexakoptéra nebo octokoptéra.
Charakteristické rysy: vysoké přistávací lyžiny kvůli
možnosti přidělání zrcadlového fotoaparátu/kamery. [1]
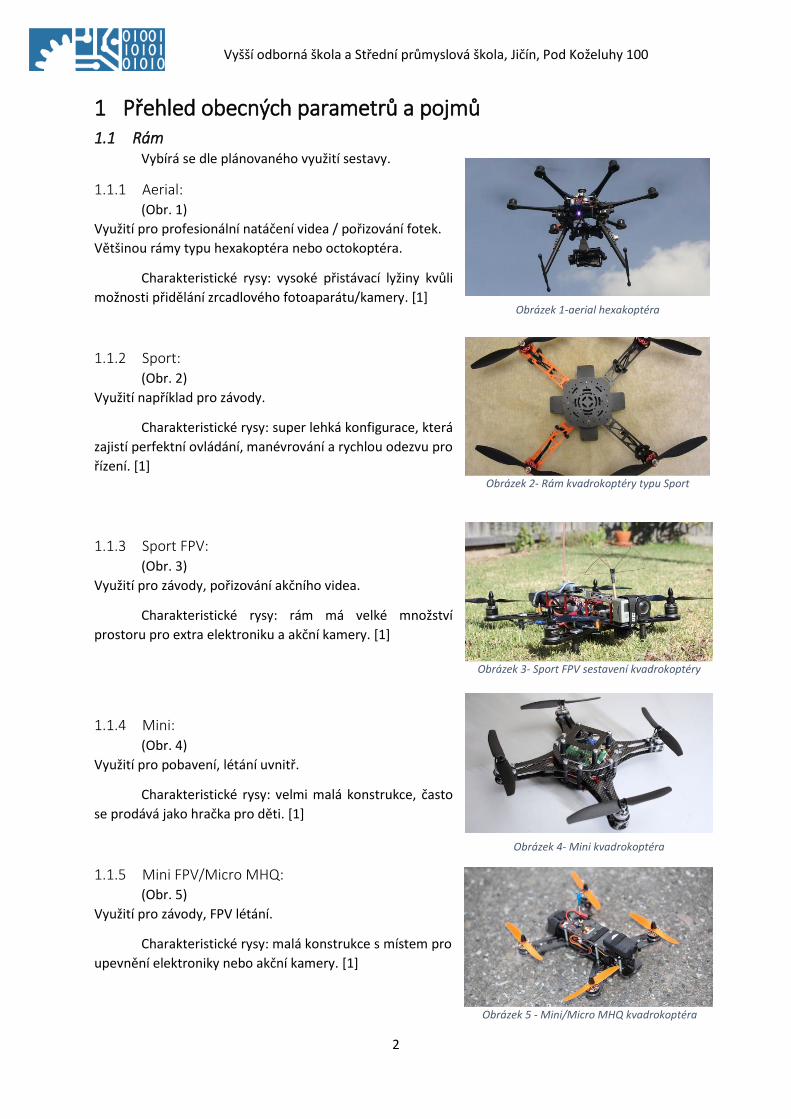
1.1.2 Sport: (Obr. 2)
Využití například pro závody.
Charakteristické rysy: super lehká konfigurace, která
zajistí perfektní ovládání, manévrování a rychlou odezvu pro
řízení. [1]
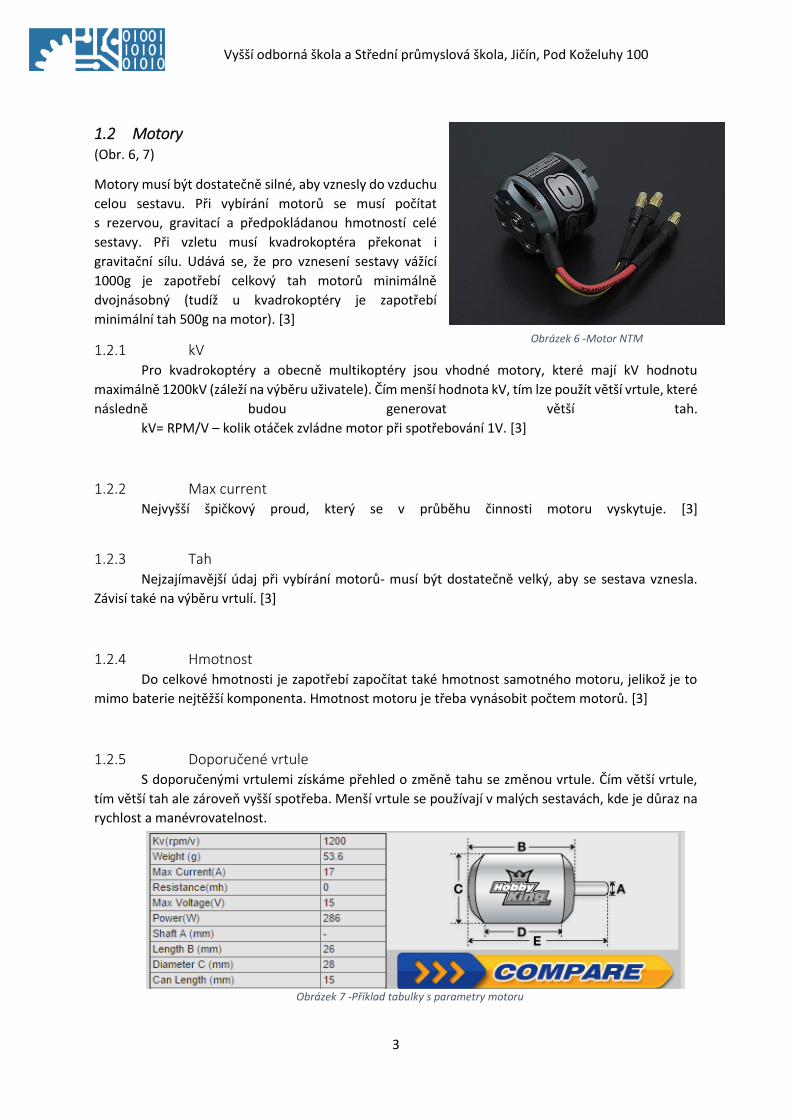
1.1.3 Sport FPV: (Obr. 3)
Využití pro závody, pořizování akčního videa.
Charakteristické rysy: rám má velké množství
prostoru pro extra elektroniku a akční kamery. [1]
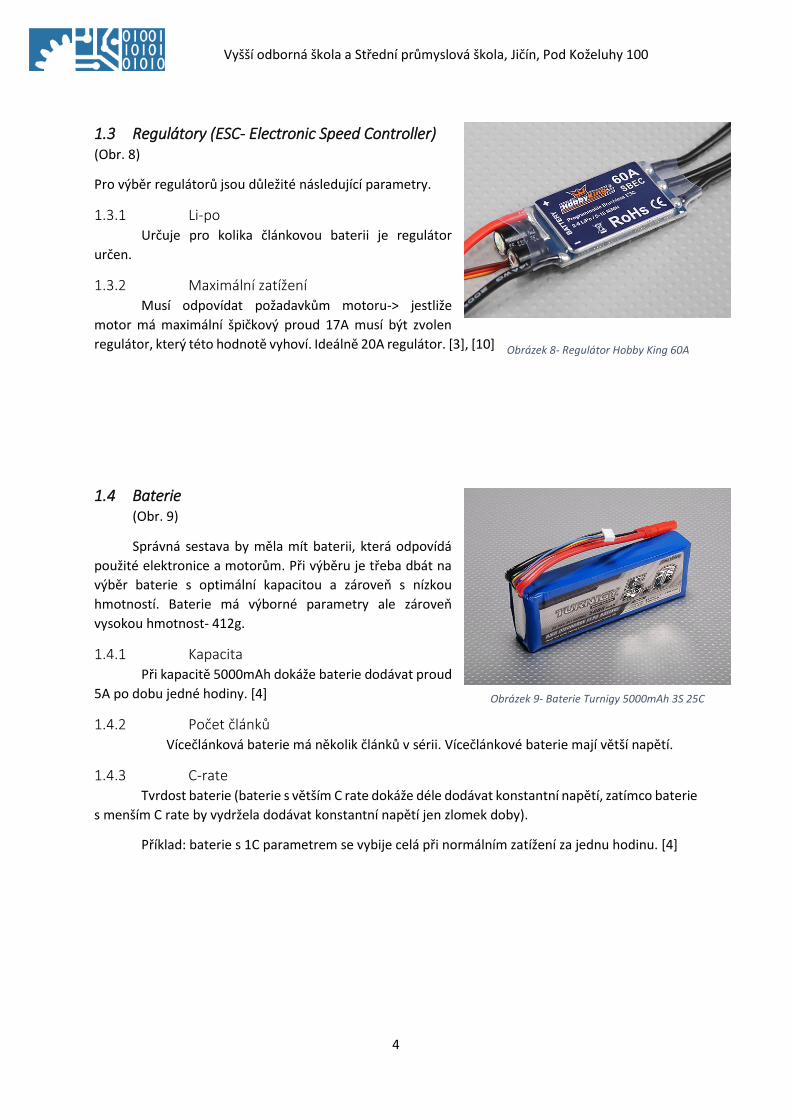
1.1.4 Mini: (Obr. 4)
Využití pro pobavení, létání uvnitř.
Charakteristické rysy: velmi malá konstrukce, často
se prodává jako hračka pro děti. [1]
1.1.5 Mini FPV/Micro MHQ: (Obr. 5)
Využití pro závody, FPV létání.
Charakteristické rysy: malá konstrukce s místem pro
upevnění elektroniky nebo akční kamery. [1]
Obrázek 1-aerial hexakoptéra
Obrázek 2- Rám kvadrokoptéry typu Sport
Obrázek 3- Sport FPV sestavení kvadrokoptéry
Obrázek 4- Mini kvadrokoptéra
Obrázek 5 - Mini/Micro MHQ kvadrokoptéra
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
3
1.2 Motory (Obr. 6, 7)
Motory musí být dostatečně silné, aby vznesly do vzduchu
celou sestavu. Při vybírání motorů se musí počítat
s rezervou, gravitací a předpokládanou hmotností celé
sestavy. Při vzletu musí kvadrokoptéra překonat i
gravitační sílu. Udává se, že pro vznesení sestavy vážící
1000g je zapotřebí celkový tah motorů minimálně
dvojnásobný (tudíž u kvadrokoptéry je zapotřebí
minimální tah 500g na motor). [3]
1.2.1 kV Pro kvadrokoptéry a obecně multikoptéry jsou vhodné motory, které mají kV hodnotu
maximálně 1200kV (záleží na výběru uživatele). Čím menší hodnota kV, tím lze použít větší vrtule, které
následně budou generovat větší tah.
kV= RPM/V – kolik otáček zvládne motor při spotřebování 1V. [3]
1.2.2 Max current Nejvyšší špičkový proud, který se v průběhu činnosti motoru vyskytuje. [3]
1.2.3 Tah Nejzajímavější údaj při vybírání motorů- musí být dostatečně velký, aby se sestava vznesla.
Závisí také na výběru vrtulí. [3]
1.2.4 Hmotnost Do celkové hmotnosti je zapotřebí započítat také hmotnost samotného motoru, jelikož je to
mimo baterie nejtěžší komponenta. Hmotnost motoru je třeba vynásobit počtem motorů. [3]
1.2.5 Doporučené vrtule S doporučenými vrtulemi získáme přehled o změně tahu se změnou vrtule. Čím větší vrtule,
tím větší tah ale zároveň vyšší spotřeba. Menší vrtule se používají v malých sestavách, kde je důraz na
rychlost a manévrovatelnost.
Obrázek 6- Mini FPV kvadrokoptéra
Obrázek 7 -Příklad tabulky s parametry motoru
Obrázek 6 -Motor NTM
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
4
1.3 Regulátory (ESC- Electronic Speed Controller) (Obr. 8)
Pro výběr regulátorů jsou důležité následující parametry.
1.3.1 Li-po Určuje pro kolika článkovou baterii je regulátor
určen.
1.3.2 Maximální zatížení Musí odpovídat požadavkům motoru-> jestliže
motor má maximální špičkový proud 17A musí být zvolen
regulátor, který této hodnotě vyhoví. Ideálně 20A regulátor. [3], [10]
1.4 Baterie (Obr. 9)
Správná sestava by měla mít baterii, která odpovídá
použité elektronice a motorům. Při výběru je třeba dbát na
výběr baterie s optimální kapacitou a zároveň s nízkou
hmotností. Baterie má výborné parametry ale zároveň
vysokou hmotnost- 412g.
1.4.1 Kapacita Při kapacitě 5000mAh dokáže baterie dodávat proud
5A po dobu jedné hodiny. [4]
1.4.2 Počet článků Vícečlánková baterie má několik článků v sérii. Vícečlánkové baterie mají větší napětí.
1.4.3 C-rate Tvrdost baterie (baterie s větším C rate dokáže déle dodávat konstantní napětí, zatímco baterie
s menším C rate by vydržela dodávat konstantní napětí jen zlomek doby).
Příklad: baterie s 1C parametrem se vybije celá při normálním zatížení za jednu hodinu. [4]
Obrázek 8- Regulátor Hobby King 60A
Obrázek 9- Baterie Turnigy 5000mAh 3S 25C
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
5
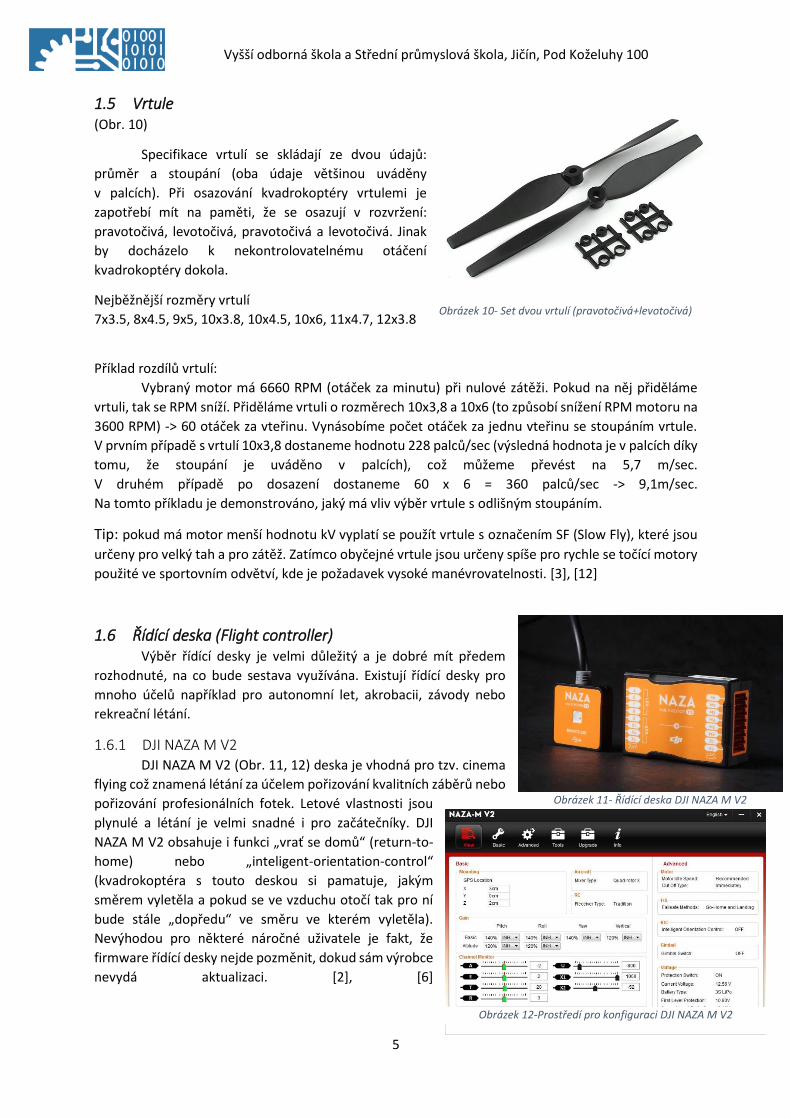
1.5 Vrtule (Obr. 10)
Specifikace vrtulí se skládají ze dvou údajů:
průměr a stoupání (oba údaje většinou uváděny
v palcích). Při osazování kvadrokoptéry vrtulemi je
zapotřebí mít na paměti, že se osazují v rozvržení:
pravotočivá, levotočivá, pravotočivá a levotočivá. Jinak
by docházelo k nekontrolovatelnému otáčení
kvadrokoptéry dokola.
Nejběžnější rozměry vrtulí
7x3.5, 8x4.5, 9x5, 10x3.8, 10x4.5, 10x6, 11x4.7, 12x3.8
Příklad rozdílů vrtulí:
Vybraný motor má 6660 RPM (otáček za minutu) při nulové zátěži. Pokud na něj přiděláme
vrtuli, tak se RPM sníží. Přiděláme vrtuli o rozměrech 10x3,8 a 10x6 (to způsobí snížení RPM motoru na
3600 RPM) -> 60 otáček za vteřinu. Vynásobíme počet otáček za jednu vteřinu se stoupáním vrtule.
V prvním případě s vrtulí 10x3,8 dostaneme hodnotu 228 palců/sec (výsledná hodnota je v palcích díky
tomu, že stoupání je uváděno v palcích), což můžeme převést na 5,7 m/sec.
V druhém případě po dosazení dostaneme 60 x 6 = 360 palců/sec -> 9,1m/sec.
Na tomto příkladu je demonstrováno, jaký má vliv výběr vrtule s odlišným stoupáním.
Tip: pokud má motor menší hodnotu kV vyplatí se použít vrtule s označením SF (Slow Fly), které jsou
určeny pro velký tah a pro zátěž. Zatímco obyčejné vrtule jsou určeny spíše pro rychle se točící motory
použité ve sportovním odvětví, kde je požadavek vysoké manévrovatelnosti. [3], [12]
1.6 Řídící deska (Flight controller) Výběr řídící desky je velmi důležitý a je dobré mít předem
rozhodnuté, na co bude sestava využívána. Existují řídící desky pro
mnoho účelů například pro autonomní let, akrobacii, závody nebo
rekreační létání.
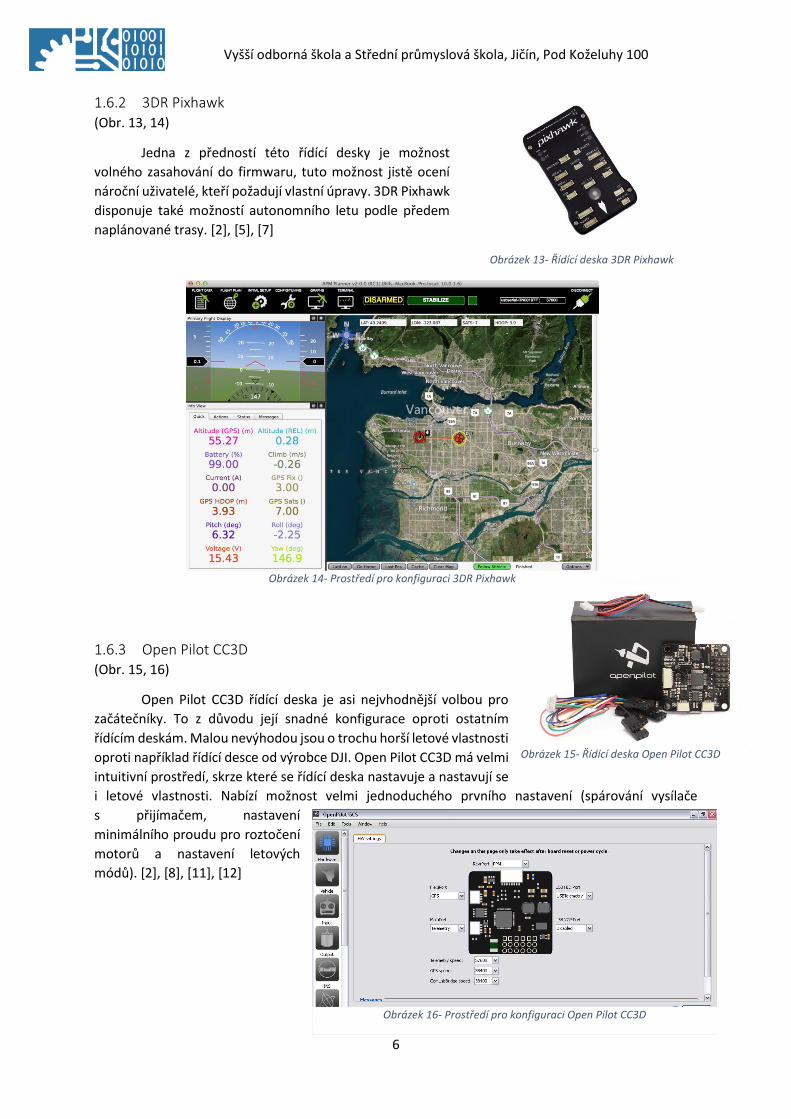
1.6.1 DJI NAZA M V2 DJI NAZA M V2 (Obr. 11, 12) deska je vhodná pro tzv. cinema
flying což znamená létání za účelem pořizování kvalitních záběrů nebo
pořizování profesionálních fotek. Letové vlastnosti jsou
plynulé a létání je velmi snadné i pro začátečníky. DJI
NAZA M V2 obsahuje i funkci „vrať se domů“ (return-to-
home) nebo „inteligent-orientation-control“
(kvadrokoptéra s touto deskou si pamatuje, jakým
směrem vyletěla a pokud se ve vzduchu otočí tak pro ní
bude stále „dopředu“ ve směru ve kterém vyletěla).
Nevýhodou pro některé náročné uživatele je fakt, že
firmware řídící desky nejde pozměnit, dokud sám výrobce
nevydá aktualizaci. [2], [6]
Obrázek 11- Řídící deska DJI NAZA M V2
Obrázek 10- Set dvou vrtulí (pravotočivá+levotočivá)
Obrázek 12-Prostředí pro konfiguraci DJI NAZA M V2
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
6
1.6.2 3DR Pixhawk (Obr. 13, 14)
Jedna z předností této řídící desky je možnost
volného zasahování do firmwaru, tuto možnost jistě ocení
nároční uživatelé, kteří požadují vlastní úpravy. 3DR Pixhawk
disponuje také možností autonomního letu podle předem
naplánované trasy. [2], [5], [7]
1.6.3 Open Pilot CC3D (Obr. 15, 16)
Open Pilot CC3D řídící deska je asi nejvhodnější volbou pro
začátečníky. To z důvodu její snadné konfigurace oproti ostatním
řídícím deskám. Malou nevýhodou jsou o trochu horší letové vlastnosti
oproti například řídící desce od výrobce DJI. Open Pilot CC3D má velmi
intuitivní prostředí, skrze které se řídící deska nastavuje a nastavují se
i letové vlastnosti. Nabízí možnost velmi jednoduchého prvního nastavení (spárování vysílače
s přijímačem, nastavení
minimálního proudu pro roztočení
motorů a nastavení letových
módů). [2], [8], [11], [12]
Obrázek 13- Řídící deska 3DR Pixhawk
Obrázek 14- Prostředí pro konfiguraci 3DR Pixhawk
Obrázek 15- Řídící deska Open Pilot CC3D
Obrázek 16- Prostředí pro konfiguraci Open Pilot CC3D
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
7
2 Výběr komponent/stavba kvadrokoptéry Tato část bude věnována stavbě kvadrokoptéry podle zadání individuální maturitní práce.
Velká většina dílů byla objednávána z e-shopu hobbyking.com z důvodu jejich ceny oproti ceně na
českých e-shopech a kvůli dostání všech komponent z jednoho místa.
Tip: vyplatí se objednat díly ze zahraničí. Díly pak stojí o mnoho méně, což se výrazně projeví na celkové
vynaložené částce.
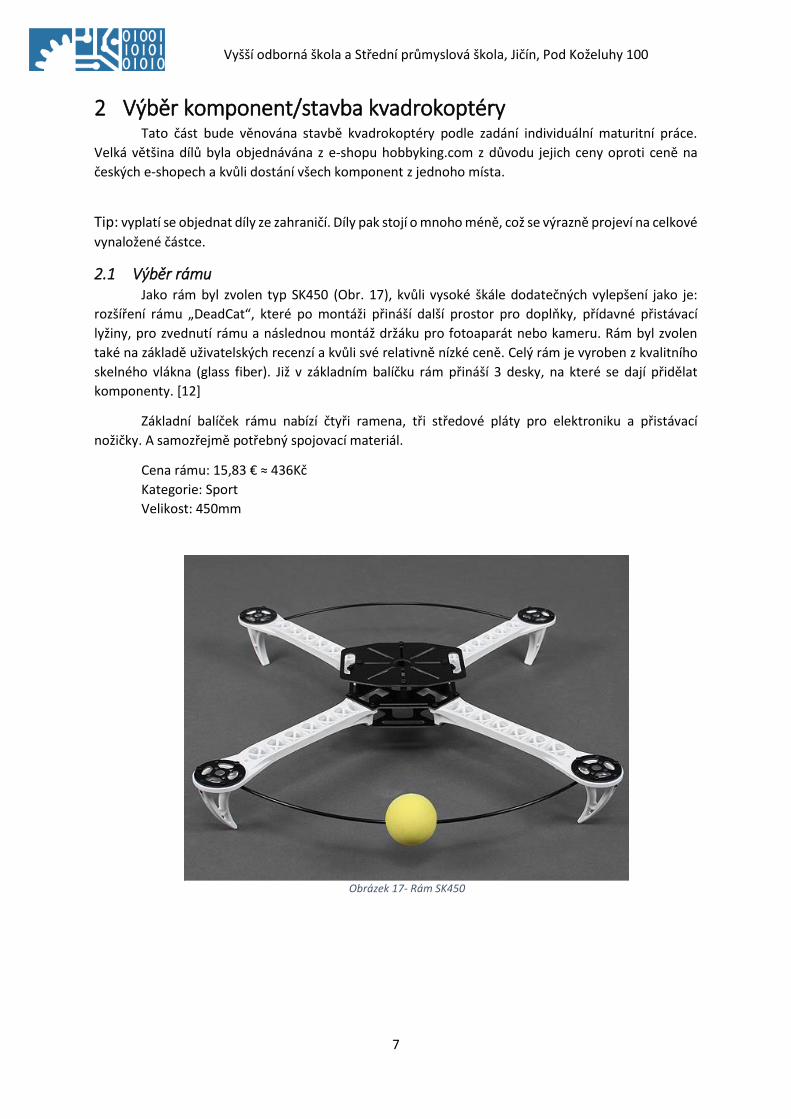
2.1 Výběr rámu Jako rám byl zvolen typ SK450 (Obr. 17), kvůli vysoké škále dodatečných vylepšení jako je:
rozšíření rámu „DeadCat“, které po montáži přináší další prostor pro doplňky, přídavné přistávací
lyžiny, pro zvednutí rámu a následnou montáž držáku pro fotoaparát nebo kameru. Rám byl zvolen
také na základě uživatelských recenzí a kvůli své relativně nízké ceně. Celý rám je vyroben z kvalitního
skelného vlákna (glass fiber). Již v základním balíčku rám přináší 3 desky, na které se dají přidělat
komponenty. [12]
Základní balíček rámu nabízí čtyři ramena, tři středové pláty pro elektroniku a přistávací
nožičky. A samozřejmě potřebný spojovací materiál.
Cena rámu: 15,83 € ≈ 436Kč
Kategorie: Sport
Velikost: 450mm
Obrázek 17- Rám SK450

Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
8
2.2 Výběr motorů Zvolené motory: NTM Prop Drive Series 28-30S 900kv / 270w (short shaft version) (Obr. 18, 19)
Motory byly vybrány od výrobce NTM, kvůli
zpracování a vyhovujícím parametrům. Tyto motory jsou
vhodné pro kvadrokoptéru díky nízké hodnotě kV a dalším
parametrům uvedeným na obrázku. Motory jsou v provedení
Outrunner (otáčí se obal motoru, zatímco vnitřek motoru je
statický). [12]
Přehled parametrů při použití určitých druhů vrtulí.
13x4 - 11.1v - 194W - 17.4A - 1.04kg tah
12x6 - 11.1v - 195W - 17.8A - 1.01kg tah
11x7 - 11.1v - 188W - 17.0A - 0.89kg tah
10x5 - 11.1v - 133W - 12.0A - 0.75kg tah
9x6 - 11.1v - 120W - 10.7A - 0.68kg tah
9x6 - 14.8v - 234W - 15.8A - 1.05kg tah Hmotnost: 66g/ks
8x4 - 14.8v - 159W - 10.6A - 0.75kg tah [12] Cena: 14,26€/ks ≈ 396Kč/kus
2.3 Výběr regulátorů Zvolené regulátory: Hobby King 20A ESC 3A UBEC
(Obr. 20)
Tyto regulátory disponují konstantním napětím 20A a
zvládnou 25A při maximální zátěži. Dají se využít pro
baterie 2-4S Li-Po. Regulátory se dají programovat
pomocí programovací karty. Tuto možnost ocení zvláště
profesionálové, kteří chtějí mít nastavené parametry
podle svých představ.
Varianta UBEC znamená, že regulátory šetří baterii a při
provozu se tolik nezahřívají.
Hmotnost:30g
Cena: 7,04€/ks ≈ 197Kč/ks
Tyto regulátory jsem vybral na základě doporučení a proto, že splňují potřebné parametry pro použití
s vybranými motory. [12]
Obrázek 18- Motor NTM
Obrázek 19- Tabulka parametrů zvoleného motoru
Obrázek 20- Zvolený regulátor
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
9
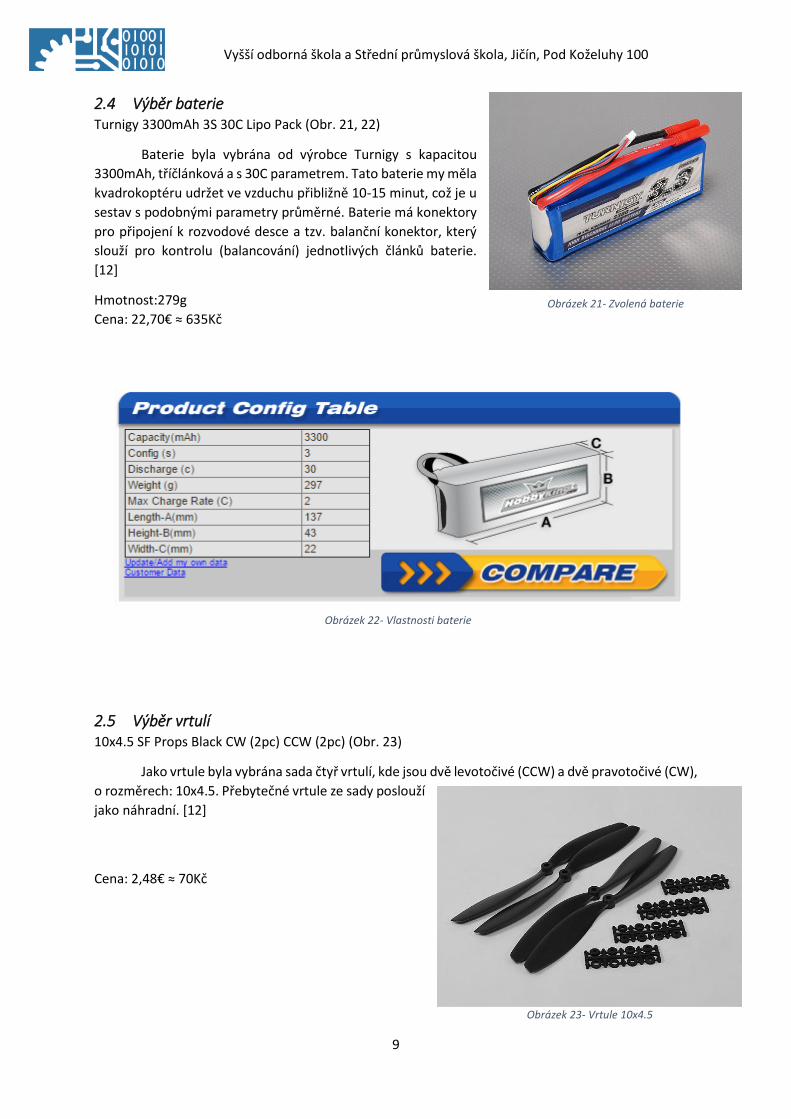
2.4 Výběr baterie Turnigy 3300mAh 3S 30C Lipo Pack (Obr. 21, 22)
Baterie byla vybrána od výrobce Turnigy s kapacitou
3300mAh, tříčlánková a s 30C parametrem. Tato baterie my měla
kvadrokoptéru udržet ve vzduchu přibližně 10-15 minut, což je u
sestav s podobnými parametry průměrné. Baterie má konektory
pro připojení k rozvodové desce a tzv. balanční konektor, který
slouží pro kontrolu (balancování) jednotlivých článků baterie.
[12]
Hmotnost:279g
Cena: 22,70€ ≈ 635Kč
2.5 Výběr vrtulí 10x4.5 SF Props Black CW (2pc) CCW (2pc) (Obr. 23)
Jako vrtule byla vybrána sada čtyř vrtulí, kde jsou dvě levotočivé (CCW) a dvě pravotočivé (CW),
o rozměrech: 10x4.5. Přebytečné vrtule ze sady poslouží
jako náhradní. [12]
Cena: 2,48€ ≈ 70Kč
Obrázek 21- Zvolená baterie
Obrázek 22- Vlastnosti baterie
Obrázek 23- Vrtule 10x4.5
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
10
2.6 Výběr řídící desky Jako řídící deska byla vybrána deska Open Pilot CC3D (Obr. 24), kvůli
své ceně a kvůli jednoduchosti, jakou poskytuje pro začátečníky.
Řídící deska obsahuje také tří-osý gyroskop a akcelerometr. V e-
shopu hobbyking.com se nachází tato deska vyráběná přímo
společností Hex Tronik pod licencí od společnosti Open Pilot, díky
tomu je k dostání téměř za poloviční cenu. Také Open Pilot komunita
na internetu a internetových fórech je velice vstřícná. [8], [11], [12]
Hmotnost:5.7g
Cena: 28,15€ ≈ 788Kč
3 Výběr ostatních komponent Dále je třeba vybrat zbývající komponenty, které jsou pro stavbu nezbytné. Od rozvodové
desky po distanční sloupky.
3.1 Rozvodová deska pro napájení Hobbyking Multi-Rotor Power Distribution Board (DIY 8 x
output PCB) (Obr. 25)
Tato rozvodová deska byla vybrána kvůli možnosti
napájení konektorů vlastnoručně. Zároveň zcela vyhovuje
požadavkům. [12]
Hmotnost:7,6g
Cena: 1,75€ ≈ 50Kč
3.2 Konektory pro baterii HXT 4mm to XT-60 Battery Adapter (2pcs/bag) (Obr. 26)
Pomocí tohoto konektoru můžeme připojit baterii
k rozvodové desce. [12]
Cena: 3,03€ ≈ 85Kč
Obrázek 24- Zvolená řídící deska Open Pilot CC3D
Obrázek 25- Rozvodová deska
Obrázek 26- Konektory pro baterii
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
11
3.3 Adaptéry pro motory a vrtule NTM Prop Drive 28 Series Accessory Pack (Obr. 27)
Adaptéry se prodávají v balíčku spolu s potřebným
spojovacím materiálem, nástavcem na motor a „čepičkou“.
[12]
Hmotnost:13,8g
Cena: 1,66€/balení ≈ 45Kč/balení
3.4 Konektory pro regulátory a rozvodovou desku PolyMax 3.5mm Gold Connectors 10 PAIRS (20PC) (Obr. 28)
Konektory potřebné pro propojení motorů s regulátory a
rozvodové desky s konektory pro baterii. [12]
Cena: 1,61€/balení ≈ 42Kč/balení
3.5 Distanční sloupky velké 5.6mm x 16mm M3 Nylon Threaded Spacer (10pc)
(Obr. 29)
Tyto sloupky se upotřebí při přichycování vrchního
plátu rámu ke zbytku rámu sestavy. [12]
Cena: 0,81€/balení ≈ 23Kč/balení
3.6 Distanční sloupky malé 5.6mm x 12mm M3 Nylon Threaded Spacer (10pc)
(Obr. 30)
Tyto sloupky se upotřebí při přichycování řídící
desky k rámu sestavy. [12]
Cena: 0,76€/balení ≈ 20Kč/balení
Obrázek 27- Adaptér pro motor a vrtuli
Obrázek 28- Konektory pro regulátory a rozvodovou desku
Obrázek 29- Distanční sloupky velké
Obrázek 30- Distanční sloupky malé
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
12
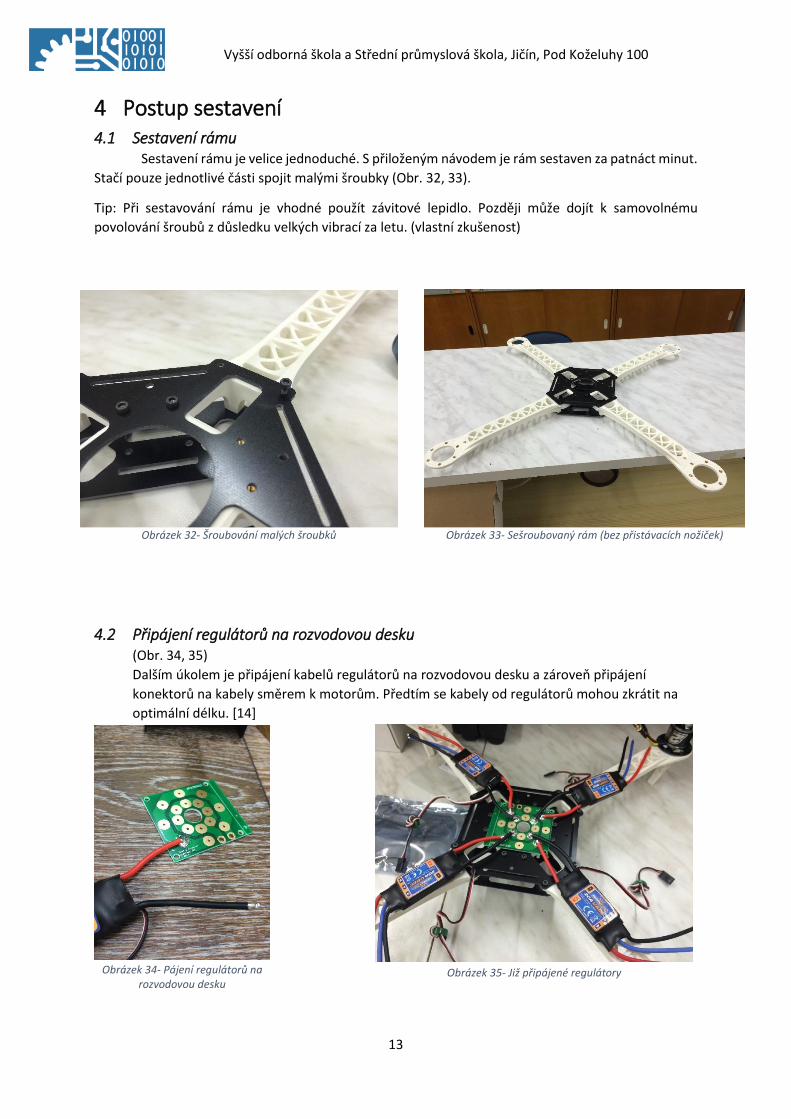
3.7 Vysílač a přijímač Turnigy 9X 9Ch Transmitter w/ Module & 8ch Receiver (Mode 2) (v2 Firmware) (Obr. 31)
Vysílač byl vybrán na základě několika doporučení od MyFirstDrone komunity. Tento vysílač je
vhodný jak pro začátečníky tak i pokročilé.
Disponuje velkým množstvím ovládacích prvků a vestavěným displayem pro zobrazení aktuálního
nastavení. Paměť vysílače umožňuje zapamatovat si až osm uživatelů, umožňuje vybírat si mezi
přednastavenými modely například Heli nebo Acro.
Celkový dosah se uvádí ve stovkách metrů až jednoho kilometru a samozřejmě záleží na použitých
anténách jak pro vysílač, tak pro přijímač. [12]
Cena: 52,79€ ≈ 1 480Kč
Obrázek 31- Vysílač a přijímač
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
13
4 Postup sestavení 4.1 Sestavení rámu Sestavení rámu je velice jednoduché. S přiloženým návodem je rám sestaven za patnáct minut.
Stačí pouze jednotlivé části spojit malými šroubky (Obr. 32, 33).
Tip: Při sestavování rámu je vhodné použít závitové lepidlo. Později může dojít k samovolnému
povolování šroubů z důsledku velkých vibrací za letu. (vlastní zkušenost)
4.2 Připájení regulátorů na rozvodovou desku (Obr. 34, 35)
Dalším úkolem je připájení kabelů regulátorů na rozvodovou desku a zároveň připájení
konektorů na kabely směrem k motorům. Předtím se kabely od regulátorů mohou zkrátit na
optimální délku. [14]
Obrázek 32- Šroubování malých šroubků Obrázek 33- Sešroubovaný rám (bez přistávacích nožiček)
Obrázek 34- Pájení regulátorů na rozvodovou desku
Obrázek 35- Již připájené regulátory
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
14
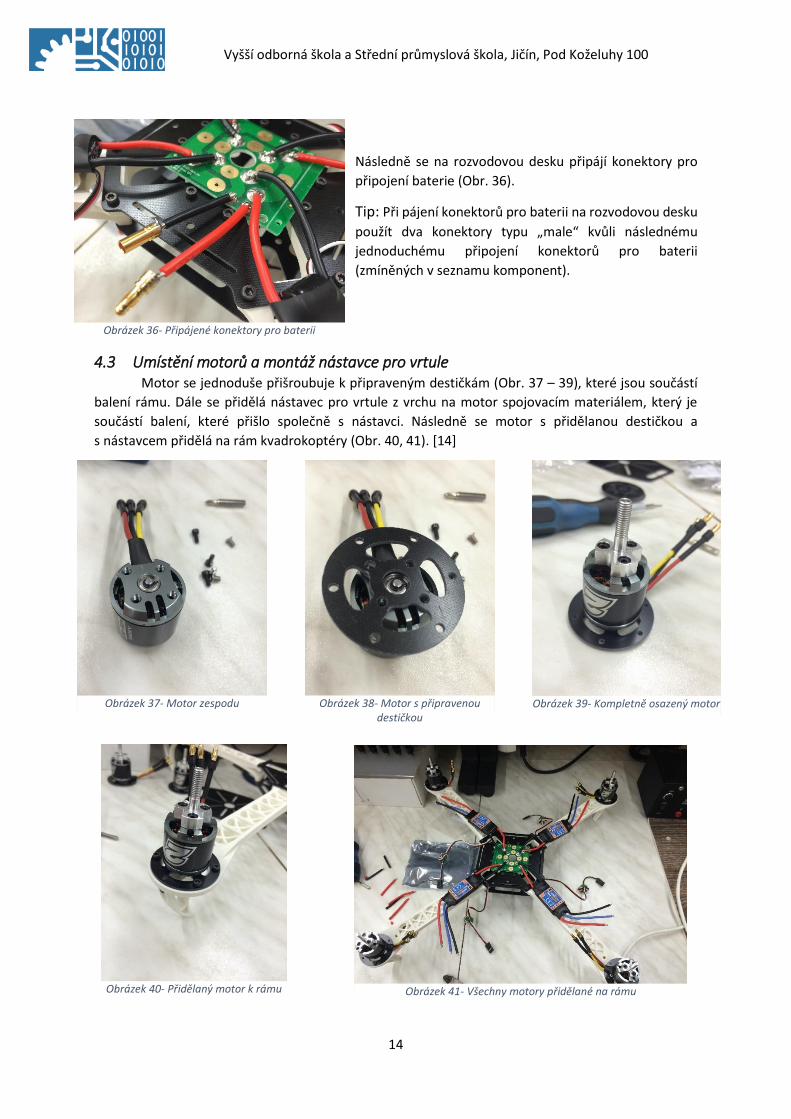
Následně se na rozvodovou desku připájí konektory pro
připojení baterie (Obr. 36).
Tip: Při pájení konektorů pro baterii na rozvodovou desku
použít dva konektory typu „male“ kvůli následnému
jednoduchému připojení konektorů pro baterii
(zmíněných v seznamu komponent).
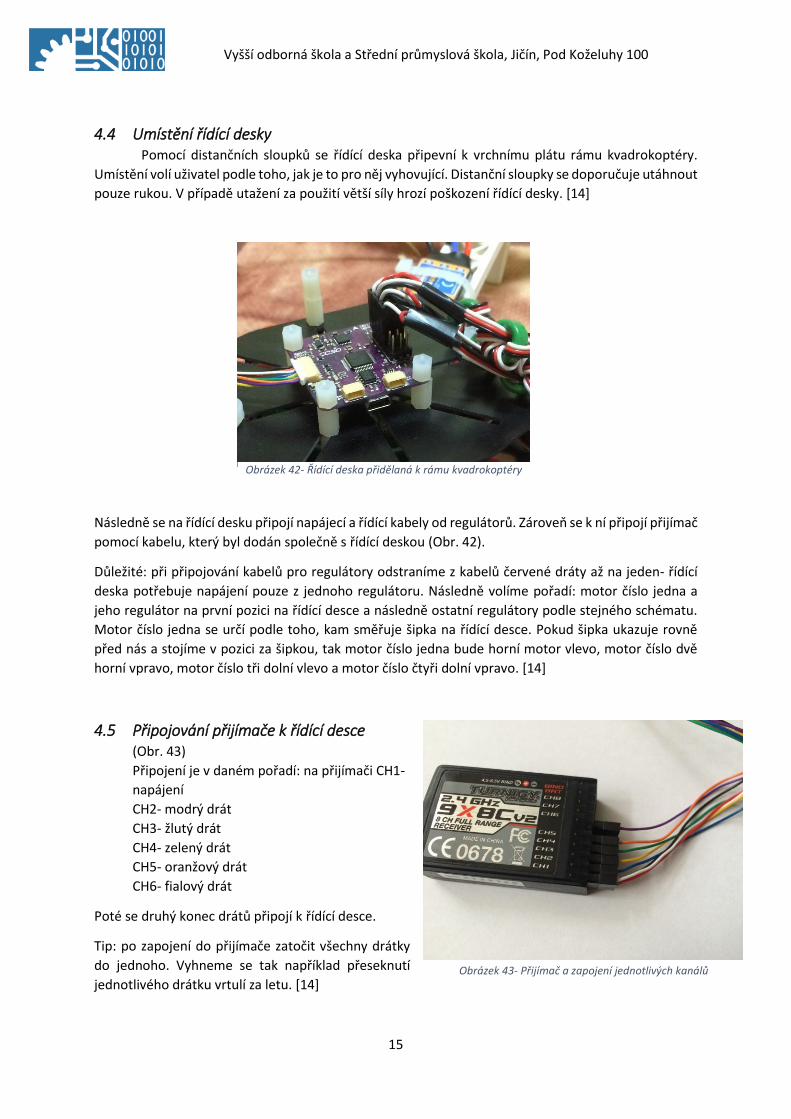
4.3 Umístění motorů a montáž nástavce pro vrtule Motor se jednoduše přišroubuje k připraveným destičkám (Obr. 37 – 39), které jsou součástí
balení rámu. Dále se přidělá nástavec pro vrtule z vrchu na motor spojovacím materiálem, který je
součástí balení, které přišlo společně s nástavci. Následně se motor s přidělanou destičkou a
s nástavcem přidělá na rám kvadrokoptéry (Obr. 40, 41). [14]
Obrázek 36- Připájené konektory pro baterii
Obrázek 37- Motor zespodu Obrázek 38- Motor s připravenou destičkou
Obrázek 39- Kompletně osazený motor
Obrázek 40- Přidělaný motor k rámu Obrázek 41- Všechny motory přidělané na rámu
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
15
4.4 Umístění řídící desky Pomocí distančních sloupků se řídící deska připevní k vrchnímu plátu rámu kvadrokoptéry.
Umístění volí uživatel podle toho, jak je to pro něj vyhovující. Distanční sloupky se doporučuje utáhnout
pouze rukou. V případě utažení za použití větší síly hrozí poškození řídící desky. [14]
Následně se na řídící desku připojí napájecí a řídící kabely od regulátorů. Zároveň se k ní připojí přijímač
pomocí kabelu, který byl dodán společně s řídící deskou (Obr. 42).
Důležité: při připojování kabelů pro regulátory odstraníme z kabelů červené dráty až na jeden- řídící
deska potřebuje napájení pouze z jednoho regulátoru. Následně volíme pořadí: motor číslo jedna a
jeho regulátor na první pozici na řídící desce a následně ostatní regulátory podle stejného schématu.
Motor číslo jedna se určí podle toho, kam směřuje šipka na řídící desce. Pokud šipka ukazuje rovně
před nás a stojíme v pozici za šipkou, tak motor číslo jedna bude horní motor vlevo, motor číslo dvě
horní vpravo, motor číslo tři dolní vlevo a motor číslo čtyři dolní vpravo. [14]
4.5 Připojování přijímače k řídící desce (Obr. 43)
Připojení je v daném pořadí: na přijímači CH1-
napájení
CH2- modrý drát
CH3- žlutý drát
CH4- zelený drát
CH5- oranžový drát
CH6- fialový drát
Poté se druhý konec drátů připojí k řídící desce.
Tip: po zapojení do přijímače zatočit všechny drátky
do jednoho. Vyhneme se tak například přeseknutí
jednotlivého drátku vrtulí za letu. [14]
Obrázek 42- Řídící deska přidělaná k rámu kvadrokoptéry
Obrázek 43- Přijímač a zapojení jednotlivých kanálů

Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
16
4.6 Nastavení řídící desky Před připojením řídící desky k počítači je nutné
stáhnout Open Pilot GCS (Ground Control Station –
pozemní kontrolní stanice). Následně řídící desku
připojíme pomocí USB kabelu k počítači a spustíme Open
Pilot GCS. Po spuštění zvolíme možnost „Vehicle Setup
Wizard“(Obr. 44, 45). Otevře se jednoduchý průvodce,
pomocí kterého provedeme nastavení regulátorů,
vysílače a samotné řídící desky.
Důležité: při nastavování regulátorů zvolit v pořadí
druhou možnost (zleva) pro nastavení regulátorů do
„rychlého módu“, při kterém se obnovovací frekvence
nastaví na 400Hz. [14]
Na vysílači je nutné nastavit model „acro“. Ve výchozím nastavení je mód nastaven na model
„heli“, který slouží pro ovládání helikoptéry a používá mixování kanálů. Pokud by se toto nastavení
neprovedlo, tak by kvadrokoptéra ihned po startu odletěla nechtěným směrem nebo by se start
nezdařil vůbec.
4.7 Pár tipů na závěr Pro nastavení hladkého startu (kolmo vzhůru) je nutné trimování pomocí malých tlačítek vedle
hlavních ovládacích páček.
Pro přidělání baterie dobře poslouží stahovací páska. Ovšem pohodlnější je pořízení pásky se
suchým zipem.
K připevnění rozvodové desky a přijímače je vhodná oboustranná lepící páska.
Obrázek 44- Open Pilot GCS
Obrázek 45- Open Pilot GCS
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
17
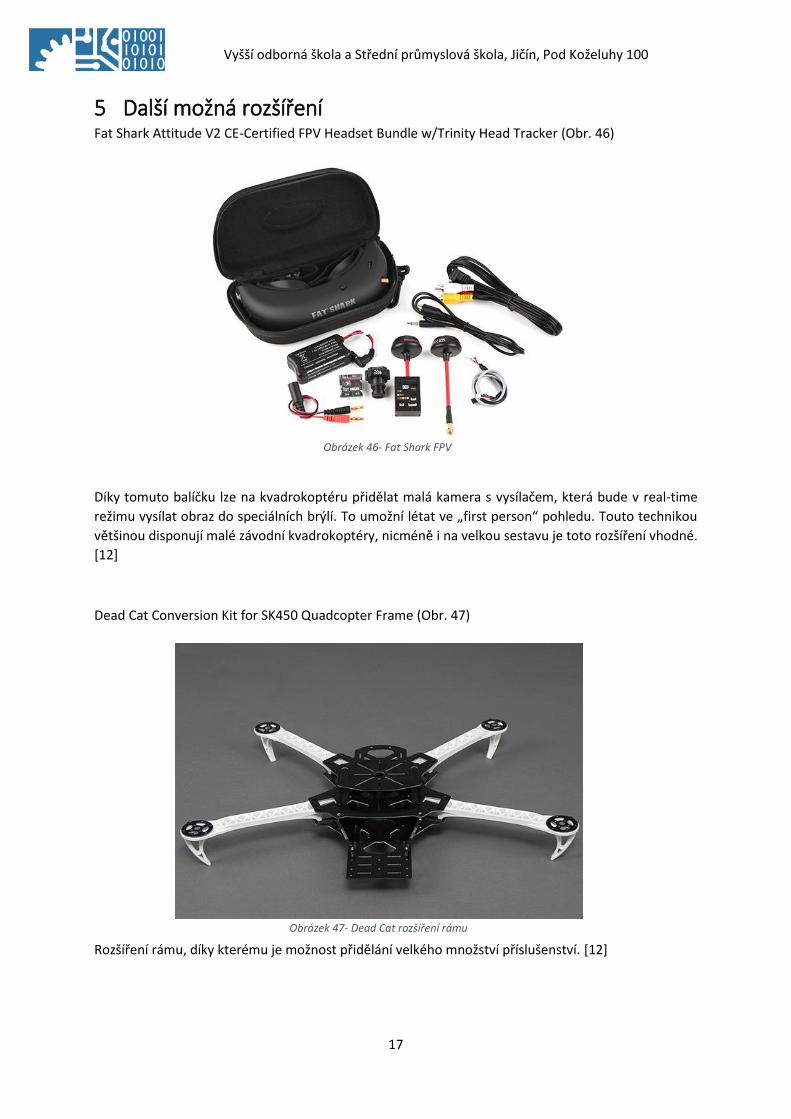
5 Další možná rozšíření Fat Shark Attitude V2 CE-Certified FPV Headset Bundle w/Trinity Head Tracker (Obr. 46)
Díky tomuto balíčku lze na kvadrokoptéru přidělat malá kamera s vysílačem, která bude v real-time
režimu vysílat obraz do speciálních brýlí. To umožní létat ve „first person“ pohledu. Touto technikou
většinou disponují malé závodní kvadrokoptéry, nicméně i na velkou sestavu je toto rozšíření vhodné.
[12]
Dead Cat Conversion Kit for SK450 Quadcopter Frame (Obr. 47)
Rozšíření rámu, díky kterému je možnost přidělání velkého množství příslušenství. [12]
Obrázek 46- Fat Shark FPV
Obrázek 47- Dead Cat rozšíření rámu

Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
18
ActionCam Inline Gimbal for FPV and Multi-Rotor (Obr. 48)
Tento stabilizovaný držák pro akční
kameru lze snadno přidělat dopředu na
rozšíření rámu (Dead Cat).
Následně do něj stačí vložit akční kameru,
připojit k řídící desce a ve výsledku je plynulé
video bez nežádoucího naklánění. [12]
Závěr Práce slouží pro přiblížení tematiky sestavování bezpilotních dronů, konkrétně kvadrokoptér.
V této dokumentaci se i laik obeznámí s problematikou stavby kvadrokoptéry a dozví se mnoho tipů,
které mu jeho stavbu usnadní. Pro zkušenějšího uživatele tato práce poslouží jako doplnění znalostí.
Práce splnila dané zadání v plném rozsahu. V úvodu se čtenář seznámí s kategoriemi, které se
v této oblasti vyskytují. Dále bude proveden skrze výběr vhodných dílů, které jsou pro stavbu
kvadrokoptéry zásadní, a udělá si přehled o ceně celé své plánované sestavy a míry složitosti na
sestavení. V závěru jsou uvedeny také možnosti dalšího rozšíření, které je volitelné.
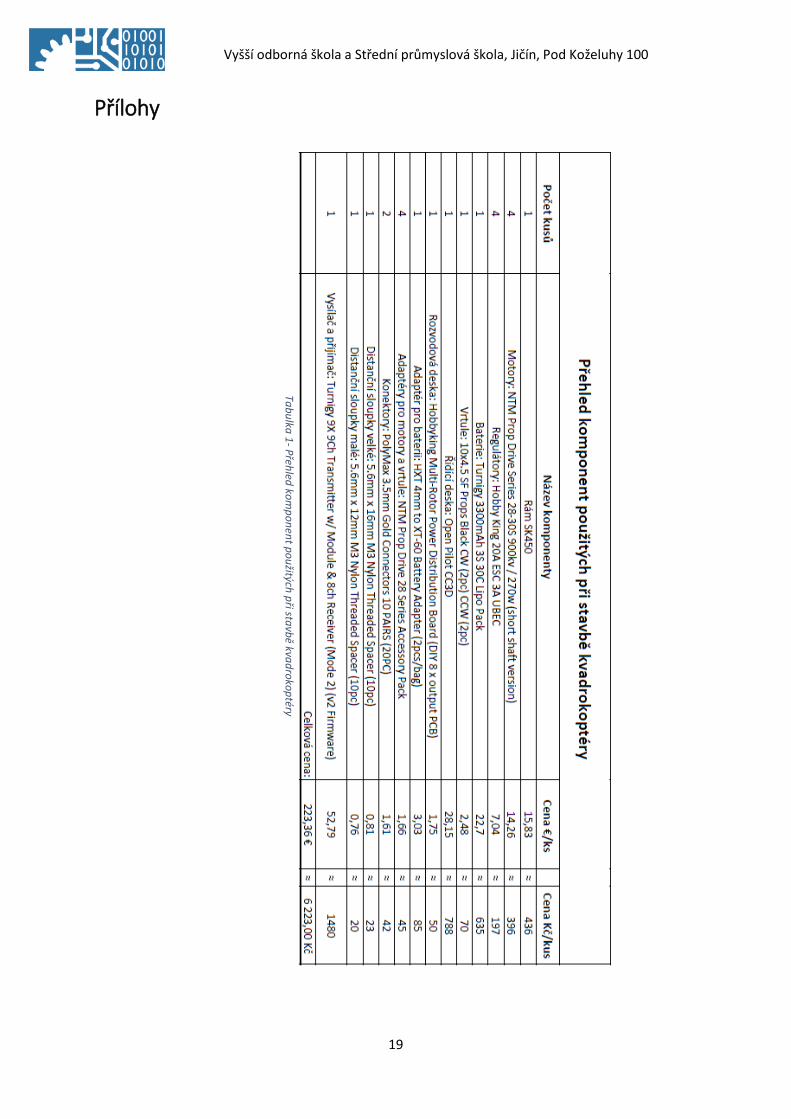
V příloze je k nalezení kompletní seznam komponent, které byly použity při stavbě kvadrokoptéry.
(Tabulka 1)
Kvadrokoptéra prošla testováním jak ve vnitřních prostorech tak ve venkovních. Dále byly
testovány různé druhy vrtulí.
Kvadrokoptéra byla k vidění také na dni otevřených dveří dne 20. 1. 2015 v tělocvičně Voš a Spš
Jičín (Obr. 49).
Obrázek 48- Stabilizovaný držák pro akční kameru
Obrázek 49- První zlomená vrtule při létání v tělocvičně
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
19
Přílohy
Tab
ulka
1- P
řehled
kom
po
nen
t po
užitých
při sta
vbě kva
dro
kop
téry
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
20
Zdroje
[1] SMITH, Korey. My first drone. Myfirstdrone.com [online]. 2014 [cit. 2015-01-15]. Dostupné z:
http://myfirstdrone.com/tutorials/best-multirotor-frame/
[2 SMITH, Korey. My first drone. Myfirstdrone.com [online]. 2014, 24.7.2014 [cit. 2015-01-15].
Dostupné z: http://myfirstdrone.com/tutorials/buying-guides/best-flight-controllers/
[3] SALAMUN, Robert. Quadcopters. The Quad Copter Guy [online]. 2014 [cit. 2015-02-15]. Dostupné
z: http://thequadcopterguy.blogspot.cz/p/choosing-your-parts_23.html
[4] A Guide to Understanding Battery Specifications [online]. MIT, 2008 [cit. 2015-02-20]. Dostupné
z: http://web.mit.edu/evt/summary_battery_specifications.pdf. Návod. MIT.
[5] 3D ROBOTICS INC. 3DR Pixhawk [online]. 2015 [cit. 2015-02-25]. Dostupné
z: http://store.3drobotics.com/products/3dr-pixhawk
[6]DJI. NAZA-M V2 [online]. 2015 [cit. 2015-01-25]. Dostupné z: http://www.dji.com/product/naza-m-v2
[7] APM Mission Planner 2.0 RC1 released. FPVCENTRAL. Fpvcentral.net [online]. 28.12.2013 [cit.
2015-02-25]. Dostupné z: http://fpvcentral.net/tag/pixhawk/
[8] Setting OpenPilot to communicate with MinimOSD. Code.google.com [online]. 14.2.2013. 2013 [cit.
2015-02-18]. Dostupné z: https://code.google.com/p/minoposd/wiki/OpenPilot
[9] Naza M V2 + GPS Combo řídící jednotky pro multikoptéry.
JAMCOPTERS.COM. JamCopters [online]. [cit. 2015-02-18]. Dostupné
z:http://www.jamcopters.cz/naza-m-v2-gps-combo-ridici-jednotky-pro-multikoptery-p217
[10] BUNZEL, Al. Electriccarconversionblog. Electriccarconversionblog.com [online]. 27.11.2011. 2011
[cit. 2015-02-18]. Dostupné z:http://electriccarconversionblog.com/what-is-esc-sbec-bec-ubec-and-
opto
[11] Core Products and Features. OPENPILOT. Wiki.openpilot.com [online]. [cit. 2015-02-18].
Dostupné z: https://wiki.openpilot.org/display/WIKI/Core+Products+and+Features
[12] HOBBY KING. Radio Control Planes, Helicopters, Cars, Boats, FPV and Quadcopters -
Hobbyking: The ultimate hobby experience [online]. © 2015 [cit. 2015-01-10]. Dostupné
z: http://www.hobbyking.com/hobbyking/store/index.asp
[13] Superia.cz. SUPERIA.CZ. http://cojeto.superia.cz/technika/dron.php [online]. (c) 2010 - 2013 [cit.
2015-01-12]. Dostupné z: http://cojeto.superia.cz
[14] SMITH, Korey. Myfirstdrone.com. Http://myfirstdrone.com/build-your-first-quad/ [online]. (c) 2015
[cit. 2015-01-12]. Dostupné z: http://myfirstdrone.com
Vyšší odborná škola a Střední průmyslová škola, Jičín, Pod Koželuhy 100
21
CD s přílohou