động cơ bldc
TRANSCRIPT

Các dạng ñộng cơ DC ñặc biệt
Động cơ DC không chổi than(BLDC)
P0015301 5P0015301 5--SESE--9 B9 Bàài 10i 10

Nguyên lý• Động cơ BLDC mặc dù có tên là “một chiều không chổi than” nhưng
nó thuộc nhóm ñộng cơ ñồng bộ nam châm vĩnh cửu
• Động cơ ñồng bộ nam châm vĩnh cửu là nhóm ñộng cơ xoay chiều ñồng bộ (tức là rotor quay cùng tốc ñộ với từ trường quay) có phần cảm là nam châm vĩnh cửu.
• Chia thành 2 loại ñộng cơ dựa vào dạng sóng sức phản ñiện ñộng stator của ñộng cơ.– -Động cơ (sóng) hình sin– -Động cơ (sóng) hình thang
• Động cơ BLDC là loại ñộng cơ sóng hình thang, những ñộng cơ còn lại là ñộng cơ sóng hình sin (ta gọi chung với tên là PM –Permanent magnet Motor).
• EMF có dạng hình thang quyết ñịnh ñể xác ñịnh một ñộng cơ BLDC chứ không phải các yếu tố khác như Hall sensor, bộ chuyển mạch ñiện tử (Electronic Commutator), .v.v.
Đặc ñiểm BLDC• Ưu ñiểm:
– Mật ñộ từ thông khe hở không khí lớn.– Tỷ lệ công suất/ khối lượng máy ñiện cao.– Tỷ lệ mômen/ quán tính lớn (có thể tăng tốc nhanh).– Vận hành nhẹ nhàng (dao ñộng của mômen nhỏ) thậm chí ở tốc ñộ thấp (ñể ñạt
ñược ñiều khiển vị trí một cách chính xác).– Mômen ñiều khiển ñược ở vị trí bằng không.– Vận hành ở tốc ñộ cao.– Có thể tăng tốc và giảm tốc trong thời gian ngắn.– Hiệu suất cao.– Kết cấu gọn.
• Nhược ñiểm– Giá thành cao – Được ñiều khiển bằng một bộ ñiều khiển với ñiện ngõ ra dạng xung vuông và
cảm biến Hall ñược ñặt bên trong ñộng cơ ñể xác ñịnh vị trí rotor � không tự ñổi chiều dòng ñiện như ñộng cơ DC thông thường
– nam châm sắt từ dễ từ hóa nhưng khả năng tích từ không cao, dễ bị khử từ và ñặc tính từ của nam châm bị giảm khi tăng nhiệt ñộ. Nhưng với loại nam châm hiếm như hiện nay thì nhược ñiểm này ñã ñược cải thiện ñáng kể.

CẤU TẠO• Stator:
– lõi sắt (các lá thép kĩ thuật ñiện ghép cách ñiện với nhau)
– dây quấn � khác so với cách quấn dây ñộng cơ xoay chiều 3 pha thông thường, sự khác biệt này tạo nên sức phản ñiện ñộng dạng hình thang
• Rotor: không có gì khác so với các ñộng cơ nam châm vĩnh cửu khác.
• Hall sensor: do ñặc thù sức phản ñiện ñộng có dạng hình thang nên cấu hình ñiều khiển thông thường của BLDC cần có dùng cảm biến hiệu ứng Hall, gọi tắt là Hall sensor ñể xác ñịnh vị trí của từ trường rotor so với các pha của cuộn dây stator

Rotor
Nam châm ñược ñặt trên rotor của ñộng cơ BLDC: (a,b,c) nam châm dán bề mặt ngoài, (d,e,f,g) nam châm ñặt bên trong rotor.

Brushless DC Motor
100
N
S
R
B
r
r
gg
b
bG
com
com
com
110
010
011
101
001
R
GB
N
S

PHƯƠNG PHÁP ĐIỀU KHIỂN
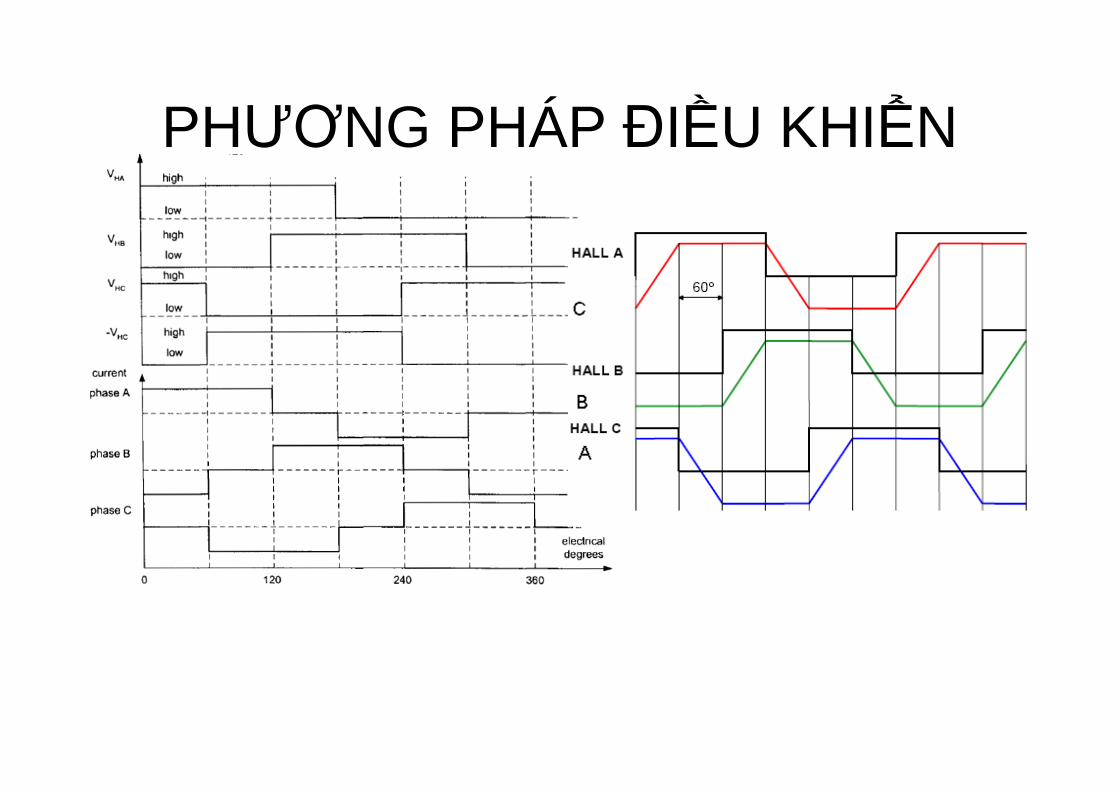
PHƯƠNG PHÁP ĐIỀU KHIỂN

Quá trình kích ñóng 6 bước+V
PWM1H
PWM1L
3 PhaseBLDC
PWM2H
PWM2L
PWM3H
PWM3L
Sector 5 0 1 2 3 4 5 0 1

+V
PWM1H
PWM1L
3 PhaseBLDC
PWM2H
PWM2L
PWM3H
PWM3L
Sector 5 0 1 2 3 4 5 0 1
Quá trình kích ñóng 6 bước

+V
PWM1H
PWM1L
3 PhaseBLDC
PWM2H
PWM2L
PWM3H
PWM3L
Sector 5 0 1 2 3 4 5 0 1
Quá trình kích ñóng 6 bước

+V
PWM1H
PWM1L
3 PhaseBLDC
PWM2H
PWM2L
PWM3H
PWM3L
Sector 5 0 1 2 3 4 5 0 1
Quá trình kích ñóng 6 bước

4 Amps Peak
Fixed Speed1000 RPM
Giản ñồ Hall sensor và dòng ñiện ngõ ra tổng
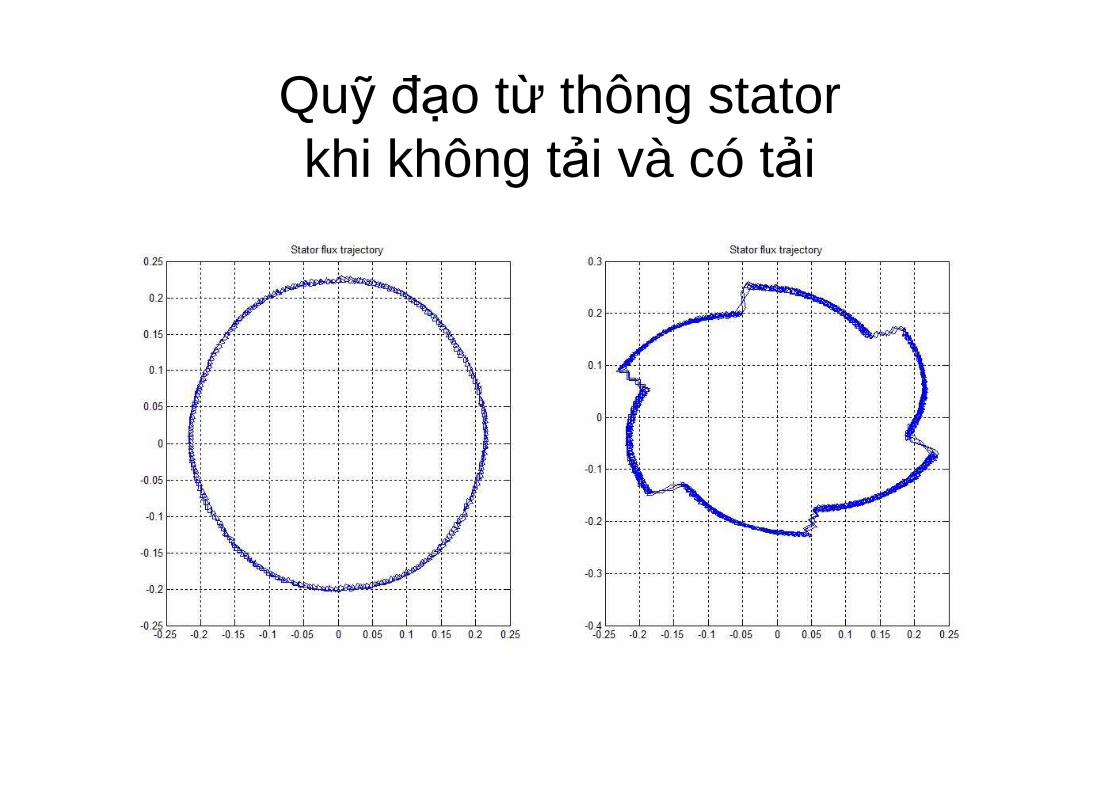
Quỹ ñạo từ thông stator khi không tải và có tải

THAY ĐỔI TỐC ĐỘ BẰNG CÁCH THAY ĐỔI ĐIỆN ÁP TRUNG BÌNH PHA
� ĐIỀU CHẾ PWM• Điện áp cung cấp cho bộ
khóa công suất không ñổi, tuy nhiên ñiện áp ra khỏi bộ khóa ñến ñộng cơ thay ñổi theo thuật toán ñiều khiển.
• Phương pháp PWM cóthể dùng cho khóa trên, khóa dưới hay ñồng thời cả hai khóa trên và dưới cùng lúc.

PWM1H
Hall EffectSensors
PWM1L
BLDC Motor có ñiều chế PWM

ĐIỀU KHIỂN ĐIỆN ÁP HÌNH SIN
còn ñược gọi là ñiều khiển AC không chổi than (brushless AC)
�giảm tiếng ồn có thể nghe thấy ñược,
�giảm gợn sóng mômen do dạng sóng ñiện áp
�dòng ñiện ra ít bị gợn sóng.

ĐIỀU KHIỂN KHÔNG CẢM BIẾN
2 kỹ thuật ñiều khiển không cảm biến:
� xác ñịnh vị trí rotor dựa vào sức ñiện ñộng của ñộng cơ� ước lượng vị trí dùng các thông số của ñộng cơ, các giá trị ñiện áp và dòng ñiện trên ñộng cơ

EMF hồi tiếp v/s Hall sensors
Back EMF
Hall sensor
ĐIỀU KHIỂN VÒNG KÍN ĐỘNG CƠ BLDC

BỘ ĐIỀU KHIỂN PI(D)
• Proportional-Integral-Differential
• Set Point - Process Variable = Error
• Control Variable = Output
• CV = Pe + I ∫e dt + D de/dt

Closed Loop
PID BLDC+ -
Tốc ñộ mong mu ốn
Tốc ñộ hồi ti ếp
Sai số tốc ñộ Voltage
Khall
Hall Sensor

PID số
+ -
Tốc ñộ ñặt
Tốc ñộ hồi ti ếp
Error Điện áp
Kp * Error
+ +
Up
Ui
Ki * ∫Error dt
Kd *dError
dt
+
Ud

PID số
• Up(T) = Kp * Error(T)
• Ui(T) = Ki * Error(T) + Ui(T-1)
• Ud(T) = Kd * (Error(T) – Error(T-1))
Voltage(T) = Up(T) + Ui(T) + Ud(T)
Kp * Error
Ki * ∫Error dt
Kd *dError
dt

PID số mở rộng
Kp * Error
Ki * ∫Error dt
Kd dError
dt
Kp * Error
Kd * (1 – Z ) * Error-1
Ki
1 - Z-1 * Error +
+
+

PID số mở rộng
Kp * Error
Kd * (1 – Z ) * Error-1
Ki
1 - Z-1 * Error +
+
+Error * Kp +
Ki
1 - Z-1
+ Kd (1 – Z )-1

Optional Digital PID
Error *Error * Kp +Kp +KiKi
1 1 -- ZZ--11 + Kd (1 + Kd (1 –– Z )Z )
--11= Controller Output= Controller Output
Error *Error *1 1 -- ZZ
--11 = Controller Output= Controller OutputKp (1 Kp (1 –– Z )Z )--11 + Ki ++ Ki + Kd (1 Kd (1 –– Z )Z )--11 22
Error *Error *1 1 -- ZZ
--11 = Controller Output= Controller Output(Kp + Ki + Kd) + ((Kp + Ki + Kd) + ( --Kp Kp -- 2*Kd) Z + Kd*Z2*Kd) Z + Kd*Z
--11 --22

PID số mở rộng
Error *1 - Z
-1 = Ngõ ra b ộ ĐK(Kp + Ki + Kd) + (-Kp - 2*Kd) Z + Kd*Z
-1 -2
Error = Error (T)
Error * Z = Error (T-1)
Error * Z = Error (T-2)-2
-1
Sai số gần nh ất
Sai số ít nh ất

Ngõ ra bộ ñiều khiển (T) = Ngõ ra bộ ñiều khiển (T – 1)+ Error (T) * K1 + Error (T-1) * K2 + Error (T-2) * K3
Với:K1 = Kp + Ki + KdK2 = -Kp -2KdK3 = Kd
Error *1 - Z
-1 = Ngõ ra bộ ñiều khiển (Kp + Ki + Kd) + (-Kp - 2*Kd) Z + Kd*Z
-1 -2
PID số mở rộng
ỨNG DỤNG
• Điều khiển ñóng ngắt có ñộ chính xác cao, môi trường dễ cháy nổ, không ñuợc bảo trì thường xuyên.
• Giao thông vận tải.• Giải trí.