
Analuutiline geomeetria 1. praktikum 11.09.2018
Tehted vektoritega
Liitmine
Def. Olgu antud kaks vektorit ~a,~b. Fikseerimepunkti A P E ja moodustame kaks seotud vektorit
AB,BC nii, et´ÑAB “ ~a,
´ÑBC “ ~b. Vektorit
´ÑAC
nimetatakse vektorite ~a ja ~b summaks.
~a
~b
~a+~ b
A
B
C
~a
~a+~ b
~a− ~b
~b
A
B
C
Omadused
~a`~b “ ~b` ~ap~a`~bq ` ~c “ ~a` p~b` ~cq~a`~0 “ ~a~a` p´~aq “ ~0
Arvuga korrutamine
Def. Vektori ~a ja reaalarvu kkorrutiseks on vektor k~a,mis rahuldab kahte tingimust1. |k~a| “ |k||~a|2. k~a � ~a, kui k ą 0
k~a Ö ~a, kui k ă 0
~a
2~a−~a
pklq~a “ kpl~aq1~a “ ~akp~a`~bq “ k~a` k~bpk ` lq~a “ k~a` l~a
Ulesanded
1. On antud vektorid ~a ja ~b. Konstrueerida vektorid ~b´ ~a ja ´~a´~b.
2. Olgu |~a| “ 11, |~b| “ 23 ja |~a´~b| “ 30. Leidke |~a`~b|.
3. Olgu ∠p~a,~bq “ 60˝, |~a| “ 5 ja |~b| “ 8. Leidke |~a`~b| ning |~a´~b|.
4. Kolm vektorit´ÑAB “ ~c,
´ÑBC “ ~a ja
´ÑCA “ ~b on kolmnurga kulgedeks. Esitage vektorite ~a,~b,~c
abil kolmnurga mediaanidega uhtivad vektorid´ÑAM,
´ÑBN,
´ÑCP .
5. Kolmnurga ABC raskuskeskmeks on punkt O. Toestage, et´ÑOA`
´ÑOB `
´ÑOC “ ~0.
6. Punktid E ja F on nelinurga ABCD kulgede AB ja CD keskpunktid.
Toestage, et´ÑEF “ 1
2p´ÑBC `
´ÑADq.
7. Punktist O lahtuvad kaks vektorit´ÑOA “ ~a ja
´ÑOB “ ~b. Toestage, et vektor
´ÑOM “ |~b|~a` |~a|~b
poolitab nurga AOB.
8. Korraparases kuusnurgas ABCDEF on´ÑAB “ ~p,
´ÑBC “ ~q. Avaldage vektorid
´ÑAC,
´ÑAD,
´ÑAE
vektorite ~p ja ~q kaudu.
9. Roopkuliku ABCD kulgede BC ja CD keskpunktid on K ja L. Avaldage vektorid´ÑBC ja
´ÑCD vektorite ~k ja ~l kaudu, kui
´ÑAK “ ~k ning
ÑAL “ ~l.
Vastused 2. 20 3. |~a ~b| “?129, |~a ~b| “ 7 4.
´ÑAM “ ~c`~a
2“ ~c ~b
2“ ´p~b`~a
2q,´ÑBN “ ~a`
~b2“ ~a´~c
2“ ´p~c`
~b2q,
´ÑCP “ ~b` ~c
2“
~b´~a2“ ´p~a` ~c
2q 8.
´ÑAC “ ~p` ~q,
´ÑAD “ 2~q,
´ÑAE “ 2~q ´ ~p 9.
´ÑBC “ 4~l´2~k
3,´ÑCD “ 2~l´4~k
3

Analuutiline geomeetria 2. praktikum 18.09.2018
Vektori ja punkti koordinaadid
Olgu ruumis E3 antud reeper ehk paar rO; t~e1, ~e2, ~e3us, kus O on ruumi fikseeritud punkt
ja t~e1, ~e2, ~e3u on ruumi baas. Olgu vektorid ~a ja ~b antud oma koordinaatidega baasi t~e1, ~e2, ~e3u
suhtes: ~a “ px1, y1, z1q, ~b “ px2, y2, z2q.
Summa, vaheKahe vektori summa (vahe) koordinaadid onnende vektorite koordinaatide summad (va-
hed): ~a˘~b “ px1 ˘ x2, y1 ˘ y2, z1 ˘ z2q.
Arvuga korrutamineVektori korrutamisel reaalarvuga k korrutubselle arvuga vektori iga koordinaat:k~a “ pkx1, ky1, kz1q.
Olgu P ruumi E3 suvaline punkt. Vektorit´ÑOP nimetatakse punkti P kohavektoriks. Punkti
P koordinaatideks on vektori´ÑOP koordinaadid.
Kui on antud ruumi kaks punkti P px1, y1, z1q ja Qpx2, y2, z2q, siis vektori´ÑPQ koordinaadid
avalduvad jargmiselt:´ÑPQ “ px2 ´ x1, y2 ´ y1, z2 ´ z1q.
Avaldist k1 ~a1 ` k2 ~a2 ` . . . ` kn ~an “řn
i“1 ki~ai, kus ~a1, ~a2, . . . , ~an on vektorid jak1, k2, . . . , kn on arvud, nimetatakse vektorite ~a1, ~a2, . . . , ~an lineaarkombinatsiooniks kor-dajatega k1, k2, . . . , kn.
Ulesanded
1. Olgu ~a “ p2, 4q, ~b “ p´3, 1q ja ~c “ p5,´2q. Leidke vektorid 2~a´~b´ 2~c ja ~a´~b´ 3~c.
2. Ruumis on antud vektorid ~a “ p3,´2, 6q ja ~b “ p´2, 1, 0q. Leidke vektorid 2~a` 3~b ja 13~a´~b.
3. Esitage vektor ~c vektorite ~a ja~b lineaarkombinatsioonina, kui a) ~a “ p4,´2q, ~b “ p3, 5q, ~c “ p1,´7q,
b) ~a “ p´6, 2q, ~b “ p4, 7q, ~c “ p9,´3q.
4. Esitage vektor ~d vektorite ~a,~b,~c lineaarkombinatsioonina, kui a) ~a “ p2, 3, 1q, ~b “ p5, 7, 0q,
~c “ p3,´2, 4q, ~d “ p4, 12,´3q, b) ~a “ p3, 5, 6q, ~b “ p2,´7, 1q, ~c “ p12, 0, 6q, ~d “ p0, 20, 18q.
5. Leidke vektori´ÑAB “ px, yq lopp-punkti koordinaadid, kui a) x “ ´1, y “ 3, Ap´1, 0q,
b) x “ 0, y “ ´3, Ap4, 3q.
6. On antud trapetsi kolm jarjestikust tippu Ap´2,´3q, Bp1, 4q, Cp3, 1q. Leidke neljas tipp Dtingimusel, et alus AD on viis korda pikem alusest BC.
7. Roopkuliku kolme tipu A, B, C kohavektorid on ~a, ~b, ~c. Avaldage nende kaudu B vastastipuD kohavektor ~d.
8. Roopkuliku kolm tippu on Ap4, 2q, Bp5, 7q, Cp´3, 4q. Leidke tipu B vastastipp D.
9. Naidake, et kolm punkti Ap0, 5q, Bp2, 1q, Cp´1, 7q asetsevad uhel sirgel.
10. Loik otspunktidega Ap´1, 8, 3q ja Bp9,´7,´2q on jagatud punktidega C, D, E, F viieksvordseks osaks. Leidke nende punktide koordinaadid.
Vastused 1. p´3, 11q, p´10, 9q 2. p0,´1, 12q, p3,´53, 2q 3. a)~c “ ~a´~b, b)~c “ ´3
2~a 4. a)~d “ ~a`~b´~c,
b)~d “ 4~a´~c 5. a)Bp´2, 3q, b)Bp4, 0q 6.Dp8,´18q 7. ~d “ ~a`~c ~b 8.Dp´4,´1q 10. Cp1, 5, 2q, Dp3, 2, 1q,Ep5,´1, 0q, F p7,´4,´1q

Analuutiline geomeetria 3. praktikum 25.09.2018
Vektorite skalaarkorrutis
Def. Kahe vektori ~a,~b P E skalaarkorrutiseks nimetatakse arvu x~a,~by :“ |~a||~b| cos∠p~a,~bq.
Omadused Olgu ~a,~b,~c P E ja k, l P R.‚ x~a,~by “ x~b,~ay (kommutatiivsus) ‚ xk~a` l~b,~cy “ kx~a,~cy ` lx~b,~cy (lineaarsus)
‚ x~a,~by “ 0ô ~a K ~b ‚ x~a,~ay “ |~a|2 > 0, kusjuures x~a,~ay “ 0ô ~a “ ~0
Valemid ristkoordinaatidesOlgu vektorid antud ristkoordinaatides ~a “ px1, y1, z1q, ~b “ px2, y2, z2q.
‚ x~a,~by “ x1x2 ` y1y2 ` z1z2 ‚ cos∠p~a,~bq “ x~a,~by
|~a||~b|“
x1x2 ` y1y2 ` z1z2a
x21 ` y21 ` z21
a
x22 ` y22 ` z22
‚ |~a| “a
x21 ` y21 ` z21
Loigu jagamine antud suhtes Olgu antud loigu otspunktid P px1, y1, z1q ja Rpx2, y2, z2q.Punkti Q, mis jaotab loigu PR suhtes a
b, kus a ą 0, b ą 0, koordinaadid avalduvad jargmiselt
Q`
bx1`ax2
a`b, by1`ay2
a`b, bz1`az2
a`b
˘
.
Ulesanded
1. Loigu otspunktid on P p2, 3q ja Rp´5, 1q. Leidke loigu PR jaotuspunkt Q, mis jagab loigusuhtes 1 : 3.
2. Loigu otspunktid on P p1, 1, 1q ja Rp1, 2, 0q. Leidke loigu PR jaotuspunkt Q, mis jagab loigusuhtes 2 : 1.
3. Leidke vektorite ~a ja ~b skalaarkorrutis, kui a) |~a| “ 8, |~b| “ 5, ∠p~a,~bq “ 60˝,
b) |~a| “ |~b| “ 1, ∠p~a,~bq “ 135˝, c) |~a| “ 3, |~b| “ 1, ~a � ~b, d) |~a| “ 3, |~b| “ 1, ~a Ö ~b.
4. Leidke skalaarkorrutis x~p, ~qy, kui ~p “ 3~a`~b´ 2~c ja ~q “ ~a´ 4~b´ 5~c, kus ~a, ~b, ~c on paarikauparistuvad uhikvektorid.
5. Vektorid ~a, ~b, ~c moodustavad paarikaupa nurgad 60˝. Leidke vektori ~p “ ~a`~b`~c pikkus, kui|~a| “ 4, |~b| “ 2, |~c| “ 6.
6. Milline on uhikvektorite ~m ja ~n vaheline nurk, kui vektorid ~a “ ~m`2~n ja ~b “ 5~m´4~n on risti?
7. Vordkulgse kolmnurga kuljevektoriteks on uhikvektorid´ÑBC “ ~a,
´ÑCA “ ~b,
´ÑAB “ ~c. Leidke
avaldis x~a,~by ` x~b,~cy ` x~c,~ay.
8. Kolmnurga ABC kulgede pikkused on BC “ 5, CA “ 6 ja AB “ 7. Leidke x´ÑBA,
´ÑBCy.
9. Leidke abstsissteljel punkt M , mille kaugus punktist Np2,´3q on 5.
10. Leidke koordinaattelgedel punktid, mis asetsevad punktidest Ap1, 1q ja Bp3, 7q vordsel kaugusel.
11. On antud ruudu vastastipud Ap3, 0q ja Cp´4, 1q. Leidke ruudu teised tipud.
12. Kolmnurga tipud on Ap´1,´2, 4q, Bp´4,´2, 0q ja Cp3,´2, 1q. Leidke tipu B juures olevsisenurk.
Vastused 1.`
14, 52
˘
2.`
1, 53, 13
˘
3. a)20, b)-?22, c)3, d)´3 4. 9 5. 10 6. 60˝ 7.´3
28. 19 9. p6, 0q, p´2, 0q
10. p14, 0q,`
0, 143
˘
11. p0, 4q, p´1,´3q 12. 45˝

Analuutiline geomeetria 4. praktikum 02.10.2018
Vektorite vektorkorrutis
Def. Vektorite ~x, ~y P E3 vektorkorrutiseks nimetatakse vektorit ~x ˆ ~y, mis maaratakse kolme
tingimusega:
‚ (pikkus) |~xˆ ~y| “ |~x||~y| sin∠p~x, ~yq,‚ (siht) ~xˆ ~y K ~x, ~xˆ ~y K ~y,
‚ (suund) kui vektorid ~x, ~y on mittekollineaarsed, siis t~x, ~y, ~xˆ ~yu on parema kae kolmik.
Kui vahemalt uks vektoritest ~x voi ~y on nullvektor, siis ~xˆ ~y “ ~0.
Vektorid ~x, ~y on kollineaarsed parajasti siis, kui ~xˆ ~y “ ~0.
Kui ~x, ~y on mittekollineaarsed vektorid, siis vektorkorrutise ~xˆ ~y pikkus on vordne vektoritele
~x, ~y ehitatud roopkuliku pindalaga: S “ |~xˆ ~y|.
Omadused Olgu ~x, ~y, ~z P E3 ja k, l P R.‚ ~xˆ ~y “ ´~y ˆ ~x (kaldsummeetrilisus)
‚ pk~x` l~yq ˆ ~z “ k~xˆ ~z ` l~y ˆ ~z (lineaarsus)
Vektorkorrutis ristkoordinaatides Kui vektorid on antud parema kae ristkoordinaatides
~a “ px1, y1, z1q,~b “ px2, y2, z2q, siis nende vektorkorrutise koordinaadid avalduvad jargmiselt:
~aˆ~b “
ˆˇ
ˇ
ˇ
ˇ
y1 z1y2 z2
ˇ
ˇ
ˇ
ˇ
,´
ˇ
ˇ
ˇ
ˇ
x1 z1x2 z2
ˇ
ˇ
ˇ
ˇ
,
ˇ
ˇ
ˇ
ˇ
x1 y1x2 y2
ˇ
ˇ
ˇ
ˇ
˙
“ py1z2 ´ y2z1, x2z1 ´ x1z2, x1y2 ´ x2y1q.
Ulesanded
1. Olgu |~a| “ 3, |~b| “ 5 ja ∠p~a,~bq “ 60˝. Leidke a) |~aˆ~b|, b) |p3~a`~bq ˆ p~a´ 3~bq|.
2. Olgu |~a| “ 3, |~b| “ 4 ja x~a,~by “ ´6. Leidke |~aˆ~b|.
3. Leidke vektoritele ~a “ ~m ´ 2~n ja ~b “ 3~m ` 2~n ehitatud kolmnurga pindala, kui |~m| “ |~n| “ 6 ja
∠p~m,~nq “ 45˝.
4. On antud punktid Ap1, 2, 0q, Bp3, 0,´3q ja Cp5, 2, 6q. Leidke kolmnurga ABC pindala.
5. Leidke vektor ~x, mis on risti vektoritega ~a “ p2, 3,´1q ja ~b “ p1,´1, 3q ning rahuldab tingimust
x~x, p2,´3, 4qy “ 51.
6. Kolmnurga tipud on Ap1,´1, 2q, Bp5,´6, 2q ja Cp1, 3,´1q. Leidke tipust B kuljele AC tommatud
korgus.
7. On antud kolmnurga kaks kulge´ÑAB “ 3~p´ 4~q ja
´ÑBC “ ~p` 5~q. Leidke kolmnurga korgus |
´ÑCD|, kui
~p ja ~q on on ristuvad uhikvektorid.
8. Leidke vektoritele ~a “ 6~m´ 3~n ja ~b “ 3~m` 2~n ehitatud roopkuliku pindala, kui |~m| “ 4, |~n| “ 5 ja
∠p~m,~nq “ 30˝.
9. Millisel α vaartusel on vektorid ~p “ α~a`5~b ja ~q “ 3~a´~b kollineaarsed, kui ~a ja~b ei ole kollineaarsed?
10. Millist tingimust peavad rahuldama vektorid ~x ja ~y, et vektorid ~x`~y ja ~x´~y oleksid kollineaarsed?
Vastused 1. a)15?3
2, b)75
?3 2. 6
?3 3. 72
?2 4. 14 5. p24,´21,´15q 6. 5 7. 19
58. 210 9. ´15 10. ~x ‖ ~y

Analuutiline geomeetria 4. praktikum 02.10.2018
Vektorite segakorrutis
Def. Vektorite ~x, ~y, ~z P E3 segakorrutiseks nimetatakse arvu p~x, ~y, ~zq :“ x~x, ~y ˆ ~zy.
Mittekomplanaarsete vektorite ~x, ~y, ~z segakorrutise absoluutvaartus on vordne vektoritele ~x, ~y, ~z
ehitatud rooptahuka ruumalaga: Vrt “ |p~x, ~y, ~zq|. Vektoritele ehitatud tetraeedri ruumala on
Vte “16|p~x, ~y, ~zq|.
Vektorite ~x, ~y, ~z segakorrutis on positiivne, kui t~x, ~y, ~zu on parema kae kolmik, ja negatiivne,
kui vasaku kae kolmik.
Vektorite ~x, ~y, ~z segakorrutis vordub nulliga parajasti siis, kui vektorid ~x, ~y, ~z on komplanaarsed.
Omadused Olgu ~x, ~y, ~z P E3 ja k, l P R.‚ p~x, ~y, ~zq “ p~y, ~z, ~xq “ p~z, ~x, ~yq “ ´p~y, ~x, ~zq “ ´p~x, ~z, ~yq “ ´p~z, ~y, ~xq
‚ pk ~x1 ` l ~x2, ~y, ~zq “ kp ~x1, ~y, ~zq ` lp ~x2, ~y, ~zq (lineaarsus)
Segakorrutis ristkoordinaatides Kui vektorid on antud parema kae ristkoordinaatides
~a “ px1, y1, z1q,~b “ px2, y2, z2q,~c “ px3, y3, z3q, siis nende segakorrutis vordub jargmise 3. jarku
determinandiga: p~a,~b,~cq “
ˇ
ˇ
ˇ
ˇ
ˇ
ˇ
x1 y1 z1x2 y2 z2x3 y3 z3
ˇ
ˇ
ˇ
ˇ
ˇ
ˇ
.
Ulesanded
1. Arvutage vektorite ~a “ p2, 3,´1q,~b “ p1,´4, 3q ja ~c “ p0, 7, 0q segakorrutis p~a,~b,~cq.
2. Leidke vektoritele ~a “ p1,´3, 1q,~b “ p2, 1´ 3q ja ~c “ p1, 2, 1q ehitatud rooptahuka ruumala.
3. Tetraeedri tipud on Ap2, 3, 1q, Bp4, 1,´2q, Cp6, 3, 7q ja Dp´5,´4, 8q. Leidke tetraeedri ruumala ja
tipust D tommatud korgus.
4. Tetraeedri ruumala on V “ 5 ja kolm tippu asetsevad punktides Ap2, 1,´1q, Bp3, 0, 1q ja Cp2,´1, 3q.
Leidke neljanda tipu D koordinaadid, kui ta asetseb y-teljel.
5. Toestage, et neli punkti Ap1, 2,´1q, Bp0, 1, 5q, Cp´1, 2, 1q ja Dp2, 1, 3q asetsevad samal tasandil.
6. On antud vektorid ~a “ p11, 10, 2q ja ~b “ p4, 0, 3q. Leidke uhikvektor ~c, mis on risti vektoritega ~a ja~b ning on suunatud nii, et kolmik t~a,~b,~cu on parema kae kolmik.
7. Tetraeedri tipud on Ap2,´1, 1q, Bp5, 5, 4q, Cp3, 2,´1q ja Dp4, 1, 3q. Leidke tetraeedri ruumala.
8. Rooptahuka tipust Op1, 3, 2q valjuvate servade otspunktid on Ap2, 1, 3q, Bp´1, 2, 5q ja Cp0, 4, 6q.
Leidke rooptahuka ruumala.
Vastused 1. ´49 2. 25 3. 3086, 11 4. D1p0, 8, 0q, D2p0,´7, 0q 6.
´
65?5,´ 1?
5,´ 8
5?5
¯
7. 3 8. 20

Analuutiline geomeetria 5. praktikum 09.10.2018
Sirge vorrandid
Olgu ruumis E antud reeper alguspunktiga O. Olgu selles ruumis antud sirge l sihivektoriga ~s ‰ ~0.
Fikseerime sirge l punkti A kohavektoriga ~r0 “´ÑOA. Olgu X sirge l suvaline punkt kohavektoriga
~r “´ÑOX. Vorrandit ~r “ ~r0 ` t~s, t P R nimetatakse sirge parameetriliseks vektorvorrandiks.
Olgu vektorid antud koordinaatides ~r0 “ px0, y0, z0q, ~r “ px, y, zq, ~s “ ps1, s2, s3q. Vorrandeid#
x “ x0 ` s1ty “ y0 ` s2t, t P Rz “ z0 ` s3t
nimetatakse sirge parameetrilisteks vorranditeks koordinaatides.
Vorrandeidx´ x0
s1“
y ´ y0s2
“z ´ z0s3
nimetatakse sirge kanoonilisteks vorranditeks.
Olgu antud tasandilise sirge kanooniline vorrand x´x0
s1“
y´y0s2
. Vorrandit Ax`By ` C “ 0 ,
kus A “ s2, B “ ´s1, C “ s1y0 ´ s2x0, nimetatakse tasandilise sirge uldvorrandiks.
Kui s1 ‰ 0, siis vorrandit y “ kx` b , kus k “s2s1, b “ y0 ´ kx0, nimetatakse sirge taandatud
vorrandiks. Kordajat k nimetatakse tasandilise sirge tousuks.
Olgu antud sirge l P E3 sihivektoriga ~s. Olgu A sirgel l asuv punkt ja P suvaline ruumi punkt.
Punkti P kaugus sirgeni l leitakse valemiga d “|~sˆ
ÑAP |
|~s |.
Kui on antud kaks sirget s1 ja s2 sihivektoritega ~s1 ja ~s2, siis cos∠ps1, s2q “|x~s1, ~s2y|
|~s1||~s2|.
Ulesanded
1. Sirge labib punkte Kp2, 3q ja Lp1, 4q. Leidke sellel sirgel punkt, mille ordinaat on 7.
2. Koostage sirgega t : 2x ` 3y ` 5 “ 0 ristuva ning sirgete u : 3x ´ 5y ` 11 “ 0 ja v : x ´ y ` 1 “ 0
loikepunkti labiva sirge s uldvorrand.
3. On antud esimese astme vorrand 12x´156`
8y´72“ 4. Leidke selle vorrandiga maaratud sirge uldvorrand,
taandatud vorrand ning kanooniline vorrand.
4. Toestage, et sirged s : 10x ` 15y ´ 20 “ 0 ja t : 6x ` 9y ´ 51 “ 0 on paralleelsed ning leidke nende
sirgete vaheline kaugus.
5. Koostage sirge kanoonilised vorrandid, kui see sirge labib punkti P p´3, 4,´7q ja on paralleelne sirgega
s : x`54“
y´22“ z
8.
6. Arvutage punkti kaugus sirgest: a) P p7, 9, 7q ja s : x´24“
y´13“ z
2, b) P p1, 2, 5q ja s : x “ t,
y “ ´2t` 1, z “ t` 3, t P R.
7. Milline on sirgete s : x “ 1 ` t, y “ 2, z “ 1 ´ t, t P R ja u : x´22“
y´20“ z
2vastastikune asend? Kui
sirged loikuvad, siis leidke nende loikepunkt ja nurk ∠ps, uq.
8. Koostage sirge s parameetrilised vorrandid, kui see sirge labib punkti Sp´5, 7,´2q ja on risti nii
vektoriga ~a “ p2, 1,´3q kui ka vektoriga ~b “ p5, 4,´1q.
Vastused 1. p´2, 7q 2. 3x´2y´1 “ 0 3. x`2y´5 “ 0, y “ ´12x` 5
2, x´1
´2“
y´21
4.?13 5. x`3
4“
y´42“ z`7
8
6. a)?22, b)
a
35{6 7. p2, 2, 0q, 90° 8. x “ ´5` 11t, y “ 7´ 13t, z “ ´2` 3t, t P R

Analuutiline geomeetria 6. praktikum 16.10.2018
Tasandi vorrandid
Olgu ruumis E3 antud reeper alguspunktiga O. Olgu selles ruumis antud tasand π, mis onparalleelne kahe mittekollineaarse vektoriga ~r1, ~r2 (rihivektorid). Fikseerime tasandi π punkti
A kohavektoriga ~r0 “´ÑOA. Olgu X tasandi π suvaline punkt kohavektoriga ~r “
´ÑOX. Vorrandit
~r “ ~r0 ` u~r1 ` v~r2, u, v P R nimetatakse tasandi parameetriliseks vektorvorrandiks.
Olgu ~r0 “ px0, y0, z0q, ~r “ px, y, zq, ~r1 “ px1, y1, z1q ja ~r2 “ px2, y2, z2q. Vorrandeid$
&
%
x “ x0 ` x1u` x2vy “ y0 ` y1u` y2v, u, v P Rz “ z0 ` z1u` z2v
nimetatakse tasandi parameetrilisteks vorranditeks.
Vektorit ~n ‰ ~0, mis on risti tasandiga π, nimetatakse selle tasandi normaalvektoriks. Olgu~n “ pA,B,Cq ja D “ ´Ax0 ´ By0 ´ Cz0. Vorrandit Ax`By ` Cz `D “ 0 nimetatakse
tasandi uldvorrandiks.
Kui on antud kaks tasandit π1 ja π2 normaalvektoritega ~n1 ja ~n2, siis cos∠pπ1, π2q “|x ~n1, ~n2y|
| ~n1|| ~n2|.
Ulesanded
1. Leidke tasandi uldvorrand, kui tema parameetrilised vorrandid on
$
&
%
x “ 3` uy “ 1´ 2u` 4v, u, v P R.z “ 7` 3u` 7v
2. Koostage tasandi π uldvorrand, kui on teada, et π labib punkti Ap3,´4,´5q ning et sirges : x´4
6“
y`34“ z´9
´1asub tasandil π.
3. Leidke tasandi uldvorrand, kui tasand on paralleelne xz-tasandiga ja labib punkti Cp´7, 2,´4q.
4. Koostage tasandi uldvorrand, kui tasand labib kolme punkti Ap´3, 6,´7q, Bp´1, 7,´6q jaCp´7, 3,´8q.
5. Arvutage kahe tasandi vaheline nurk: a) π1 : ´2x` 4y ´ z ` 5 “ 0, π2 : 7x` 3y ´ 2z ` 1 “ 0;b) π1 : xz-tasand, π2 : 3y ´ 3z ` 5 “ 0.
6. Koostage sirgeid s : x´11“
y`1´2“ z´2
3ja t : x
1“
y´1´2“ z`3
3labiva tasandi uldvorrand.
7. Koostage vorrand tasandile, mis on paralleelne sirgega s :
$
&
%
x “ 1´ 3ty “ ´2` t, t P Rz “ 6` 2t
ja labib sirget
l : x´32“
y`50“ z`2
1{3.
8. Leidke tasandi uldvorrand, kui tasand on paralleelne y-teljega ja labib punkte Ap3, 4, 0q ningBp7, 5,´3q.
Vastused 1. 26x` 7y´ 4z ´ 57 “ 0 2. 57x´ 85y` 2z ´ 501 “ 0 3. y´ 2 “ 0 4. x´ y´ z ` 2 “ 05. a)90°, b)45° 6. 2x` y ´ 1 “ 0 7. x` 15y ´ 6z ` 60 “ 0 8. 3x` 4z ´ 9 “ 0

Analuutiline geomeetria 7. praktikum 23.10.2018
Sirged ja tasandid
Kui sirge s on kahe tasandi loikesirge, st s :
"
A1x`B1y ` C1z `D1 “ 0
A2x`B2y ` C2z `D2 “ 0, siis vektor
~s “ pA1, B1, C1q ˆ pA2, B2, C2q on loikesirge sihivektor.
Olgu antud tasand π : Ax`By ` Cz `D “ 0 ning ruumi punkt P px1, y1, z1q. Punkti P
kaugus tasandist π leitakse valemiga d “|Ax1 `By1 ` Cz1 `D|
?A2 `B2 ` C2
.
Ulesanded
1. Leidke tasandite π1 : 2x` 3y´ 4z` 5 “ 0 ja π2 : 7x` y´ 2z´ 5 “ 0 loikesirgega ristuva ningpunkti Ap3,´2, 5q labiva tasandi π vorrand.
2. Leidke sirge s ja tasandi π loikepunkt:
a) s :
#
3x` 5y ´ 7z ` 16 “ 0
2x´ y ` z ´ 6 “ 0, π : 5x´ z ´ 4 “ 0;
b) s :
$
’
&
’
%
x “ 2t
y “ 1´ t, t P Rz “ 3` t
, π : x` y ` z ´ 10 “ 0.
3. Leidke punkti P p1, 2, 1q kaugus tasandist π : x` 2y ` 2z ´ 10 “ 0.
4. Koostage punktiAp´3,´8, 0q labiva ja sirgetega s : x2“
y´3“ z´4
0ning t :
#
2x´ 2y ` 2z ´ 7 “ 0
x` 9y ´ 11z “ 0
paralleelse tasandi uldvorrand.
Vastused 1. 2x` 24y ` 19z ´ 53 “ 0 2. a)Lp2, 4, 6q, b)p6,´2, 6q 3. 1 4. 3x` 2y ´ 3z ` 25 “ 0

Analuutiline geomeetria 8. praktikum 06.11.2018
Ellips
A(−a, 0) B(a, 0)
D(0, −b)
C(0, b)
OF1(−c, 0)
F2(c, 0)
X(x, y)
r1r2
x
y
x = −aε
x =a
ε
~e1
~e2b
a c
Fikseerime tasandil kaks erinevat punktiF1 ja F2 ning olgu 2c loigu F1F2 pikkus, stc “ 1
2|F1F2|. Fikseerime reaalarvu a ą c.
Tasandilist joont nimetatakse ellipsiks,kui selle joone iga punkt X rahuldab
tingimust |F1X| ` |F2X| “ 2a . Punkte
F1, F2 nimetatakse ellipsi fookusteksja pikkusi r1 “ |F1X|, r2 “ |F2X| ellipsipunkti X fokaalraadiusteks. Tasandiristreeperit rO; t~e1, ~e2us, kus O on loigu
F1F2 keskpunkt, ~e1 �´ ÑF1F2, |~e1| “ 1,
~e2 K ~e1, |~e2| “ 1 ja t~e1, ~e2u on parema kae baas, nimetatakse ellipsi kanooniliseks reeperiks.
Ellipsi vorrand kanoonilise reeperi korral onx2
a2`
y2
b2“ 1 , kus b2 “ a2 ´ c2.
Loike OA, OB, OC, OD ja nende pikkusi a ning b nimetatakse ellipsi pooltelgedeks.
Arvu ε “c
a, 0 ă ε ă 1 nimetatakse ellipsi ekstsentrilisuseks.
Kui Xpx, yq on ellipsi suvaline punkt fokaalraadiustega r1, r2, siis r1 “ a` εx, r2 “ a´ εx .
Sirgeid x “ ˘a
εnimetatakse ellipsi juhtsirgeteks.
Ulesanded
1. Leidke ellipsi pooltelgede pikkused, fookuste koordinaadid ja ekstsentrilisus, kui ellips on antudvorrandiga a) 16x2 ` 25y2 “ 400, b) x2 ` 9y2 “ 36.
2. Koostage ellipsi kanooniline vorrand, kui ellipsi a) fookuste vaheline kaugus on 8 ja suur telgon 10, b) suurem pooltelg on 10 ja ekstsentrilisus on 0.8, c) fookuste vaheline kaugus on 4
?5
ja pooltelgede summa on 10, d) juhtsirgete vaheline kaugus on 13 ja vaike telg on 6.
3. Leidke ellipsilx2
45`
y2
20“ 1 punkt, mille fokaalraadiusvektorid on risti.
4. Ellips labib punkte Mp?3,´2q ja Np´2
?3, 1q. Koostage ellipsi kanooniline vorrand.
5. Ellipsi ekstsentrilisus on 0.5 ja parempoolne juhtsirge on antud vorrandiga x “ 16. Arvutageellipsi punkti M , mille abstsiss on ´4, kaugus parempoolsest fookusest.
6. Ellipsi juhtsirgete vaheline kaugus on 36 ningi tema mingi punkti fokaalraadiused on 9 ja 15.Leidke ellipsi kanooniline vorrand.
Vastused 1. a)a “ 5, b “ 4, F p˘3, 0q, ε “ 0.6, b)a “ 6, b “ 2, F p˘4?2, 0q, ε “ 2
?2
32. a)x
2
25`
y2
9“ 1,
b) x2
100`
y2
36“ 1, c)x
2
36`
y2
16“ 1, d)x
2
13`
y2
9“ 1, x2
11714
`y2
9“ 1 3. p˘3,˘4q, p˘3,¯4q 4. x2
15`
y2
5“ 1 5. 10
6. x2
144`
y2
80“ 1

Analuutiline geomeetria 9. praktikum 13.11.2018
Huperbool
y =b
ax y = − b
ax
x
y
O
A B
D
C
F1 F2
ba c
x = −aε
x =a
ε
~e1
~e2
Xr1
r2
Fikseerime tasandil kaks erinevat punktiF1 ja F2 ning olgu 2c loigu F1F2 pikkus,st c “ 1
2|F1F2|. Fikseerime reaalarvu
a ą 0 nii, et a ă c. Tasandilistjoont nimetatakse huperbooliks, kui sellejoone iga punkt X rahuldab tingimustˇ
ˇ|F1X| ´ |F2X|ˇ
ˇ “ 2a . Punkte F1, F2
nimetatakse huperbooli fookusteks japikkusi r1 “ |F1X|, r2 “ |F2X|huperbooli punktiX fokaalraadiusteks.Huperbooli vorrand kanoonilise reeperi
korral onx2
a2´
y2
b2“ 1 , kus b2 “ c2 ´ a2.
Loike OA, OB, OC, OD ja nende pikkusi a ning b nimetatakse huperbooli pooltelgedeks.
Arvu ε “c
a, ε ą 1 nimetatakse huperbooli ekstsentrilisuseks.
Kui Xpx, yq on huperbooli parempoolse (vasakpoolse) haru punkt fokaalraadiustega r1, r2, siisr1 “ εx` a, r2 “ εx´ a , ( r1 “ ´εx´ a, r2 “ ´εx` a ).
Sirgeid x “ ˘a
εnimetatakse huperbooli juhtsirgeteks. Sirgeid y “ ˘
b
ax nimetatakse
huperbooli asumptootideks.
Ulesanded
1. Leidke huperbooli 4x2 ´ 9y2 “ 36 tipud, fookused, ekstsentrilisus ja asumptoodid.
2. Koostage huperbooli vorrand, kui huperbooli a) fookuste vaheline kaugus on 10 ja fokaaltippudevaheline kaugus on 8, b) fokaalpooltelg on 5 ning fokaaltipud poolitavad keskpunkti ja fookustevahelised loigud, c) ekstsentrilisus on
?2 ja huperboolil on punkt Hp´5, 3q, d) asumptootide
vaheline nurk on 60° ja c “ 2?3.
3. Toestage, et huperbooli punkti kauguste korrutis huperbooli asumptootideni on konstant.
4. Koostage huperbooli kanooniline vorrand, kui huperbool labib punkte Ap8,´6q ja Bp6,´3q.
5. Maarake punktiMpx, yq trajektoor, kui ta jaab oma liikumisel sirgele x “ 1 kaks korda lahemalekui punktile F p4, 0q.
6. Leidke huperboolilx2
16´
y2
9“ 1 punkt, mille fokaalraadiusvektorid on risti.
Vastused 1. p˘3, 0q, p0,˘2q, F p˘?13, 0q, ε “
?133, y “ ˘2
3x 2. a)x
2
16´
y2
9“ 1, b)x
2
25´
y2
75“ 1,
c)x2
16´
y2
16“ 1, d)x
2
9´
y2
3“ 1, x
2
3´
y2
9“ 1 3. a2b2
c24. x2
80{3´
y2
180{7“ 1 5. x2
4´
y2
12“ 1 6. p˘4
5
?34,˘9
5q, p¯4
5
?34,˘9
5q
Analuutiline geomeetria 10. praktikum 20.11.2018
Parabool. Polaarkoordinaadid
O
X(x, y)
d
F(p2 , 0
)
p2
p2
r
~e1
~e2
l : x = −p
2
x
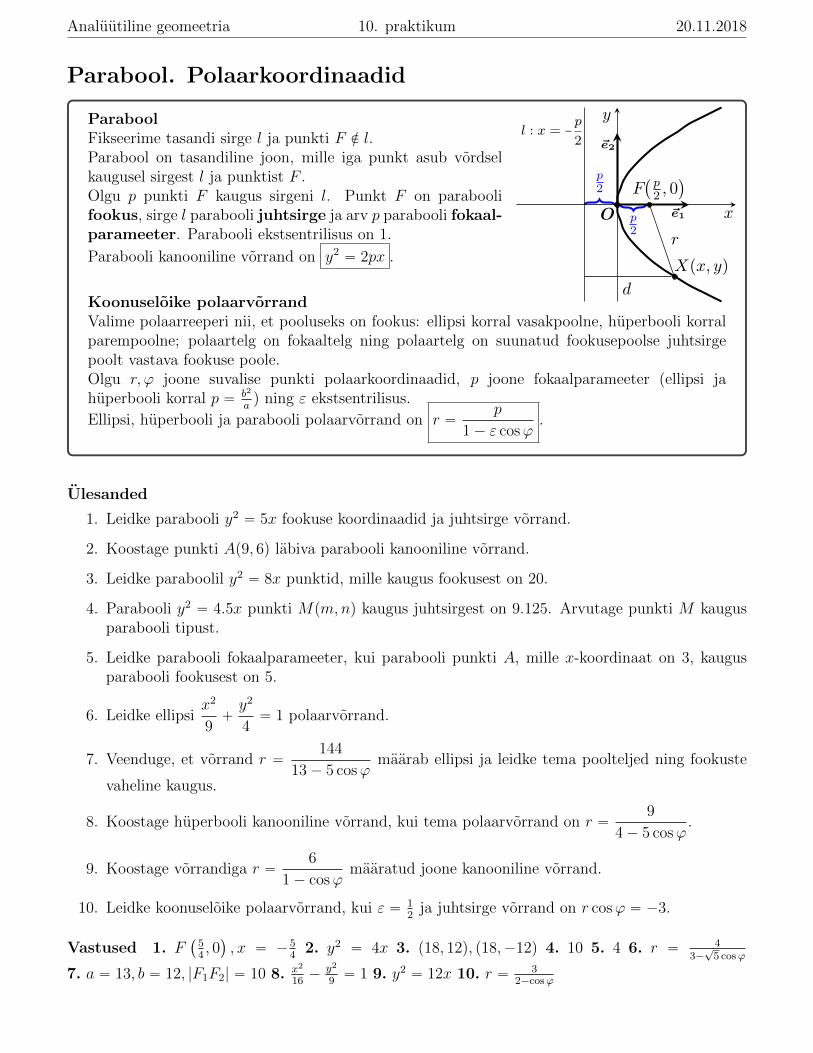
yParaboolFikseerime tasandi sirge l ja punkti F R l.Parabool on tasandiline joon, mille iga punkt asub vordselkaugusel sirgest l ja punktist F .Olgu p punkti F kaugus sirgeni l. Punkt F on paraboolifookus, sirge l parabooli juhtsirge ja arv p parabooli fokaal-parameeter. Parabooli ekstsentrilisus on 1.
Parabooli kanooniline vorrand on y2 “ 2px .
Koonuseloike polaarvorrandValime polaarreeperi nii, et pooluseks on fookus: ellipsi korral vasakpoolne, huperbooli korralparempoolne; polaartelg on fokaaltelg ning polaartelg on suunatud fookusepoolse juhtsirgepoolt vastava fookuse poole.Olgu r, ϕ joone suvalise punkti polaarkoordinaadid, p joone fokaalparameeter (ellipsi jahuperbooli korral p “ b2
a) ning ε ekstsentrilisus.
Ellipsi, huperbooli ja parabooli polaarvorrand on r “p
1´ ε cosϕ.
Ulesanded
1. Leidke parabooli y2 “ 5x fookuse koordinaadid ja juhtsirge vorrand.
2. Koostage punkti Ap9, 6q labiva parabooli kanooniline vorrand.
3. Leidke paraboolil y2 “ 8x punktid, mille kaugus fookusest on 20.
4. Parabooli y2 “ 4.5x punkti Mpm,nq kaugus juhtsirgest on 9.125. Arvutage punkti M kaugusparabooli tipust.
5. Leidke parabooli fokaalparameeter, kui parabooli punkti A, mille x-koordinaat on 3, kaugusparabooli fookusest on 5.
6. Leidke ellipsix2
9`
y2
4“ 1 polaarvorrand.
7. Veenduge, et vorrand r “144
13´ 5 cosϕmaarab ellipsi ja leidke tema poolteljed ning fookuste
vaheline kaugus.
8. Koostage huperbooli kanooniline vorrand, kui tema polaarvorrand on r “9
4´ 5 cosϕ.
9. Koostage vorrandiga r “6
1´ cosϕmaaratud joone kanooniline vorrand.
10. Leidke koonuseloike polaarvorrand, kui ε “ 12ja juhtsirge vorrand on r cosϕ “ ´3.
Vastused 1. F`
54, 0
˘
, x “ ´542. y2 “ 4x 3. p18, 12q, p18,´12q 4. 10 5. 4 6. r “ 4
3´?5 cosϕ
7. a “ 13, b “ 12, |F1F2| “ 10 8. x2
16´
y2
9“ 1 9. y2 “ 12x 10. r “ 3
2´cosϕ

Analuutiline geomeetria 11. praktikum 27.11.2018
Ellipsi, huperbooli ja parabooli puutuja
Ellipsix2
a2`
y2
b2“ 1 puutuja vorrand ellipsi punktis P px0, y0q on
x0x
a2`
y0y
b2“ 1 .
Huperboolix2
a2´
y2
b2“ 1 puutuja vorrand huperbooli punktis P px0, y0q on
x0x
a2´
y0y
b2“ 1 .
Parabooli y2 “ 2px puutuja vorrand parabooli punktis P px0, y0q on y0y “ ppx` x0q .
Ulesanded
1. Sirge 4x´ 5y ´ 40 “ 0 puutub ellipsit punktis Ap5,´4q. Leidke ellipsi kanooniline vorrand.
2. Leidke vorrand ellipsix2
5`
y2
4“ 1 puutujale, mis on paralleelne sirgega 3x´ y ´ 3 “ 0.
3. Leidke huperboolix2
6´
y2
2“ 1 puutujad, mis labivad punkti Mp1,´1q.
4. Leidke huperboolilx2
8´
y2
9“ 1 punkt, mida labiv puutuja moodustab x-teljega nurga 60°.
5. Sirge x` 3y ` 9 “ 0 on parabooli y2 “ 4x puutuja. Leidke puutepunkt.
6. Leidke parabooli y2 “ 2px parameeter p, kui parabool puutub sirget x´ 2y ` 5 “ 0.
7. Sirge x´ 2y ´ 8 “ 0 on ellipsix2
16`
y2
12“ 1 puutuja. Leidke puutepunkt.
8. Leidke huperboolix2
10´
y2
6“ 1 puutujad tema loikepunktides sirgega 3x´ 5y “ 0.
Vastused 1. x2
50`
y2
32“ 1 2. 3x´ y ˘ 7 “ 0 3. x´ y ´ 2 “ 0, 3x` 5y ` 2 “ 0 4.
´
˘8?5
5,˘3
?155
¯
,´
˘8?5
5,¯3
?155
¯
5. p9,´6q 6. 527. p2,´3q 8. x´ y ˘ 2 “ 0







