Download - CHE3162.Lecture9 PID Offset

CHE3162 Lecture 9
PID Controllers - Calculating &
Eliminating Offset
Chapter 7&8: Marlin Chapter 6: Smith & Corripio

Learning objectives
• Understand P control and calculate offset for setpoint and disturbance changes
• Understand how PI control eliminates offset • Understand how tuning control loop parameters
K, TI and τd affect response of control loops • Be able to prove the magnitude or absence of
offset using TF and final value theorem

PID response matches “common sense”
• If a big error occurs: – You need a big response Proportional P
• But there is still a remaining error: – Adjust until you eliminate error Integral I
• Rapid change – rapid response required Derivative D
∫ +++= u(0)]dtdee(t)dt
iT1[e(t)cKu(t) dτ
++= s
sTK
EU
dI
c τ11

General Block Diagram
Y Gc
U
Gm Ym
Gd D
+ + YSP E
+ - Gv Gp
DmGpGvGcG1
dGsY
mGpGvGcG1pGvGcG
Y+
++
=
Y depends on both YSP and D
Exercise: Derive this Closed Loop Transfer Equation relating Y to Ys and D
Forward 1+ “Around the loop”

P control
P control: What does offset mean?
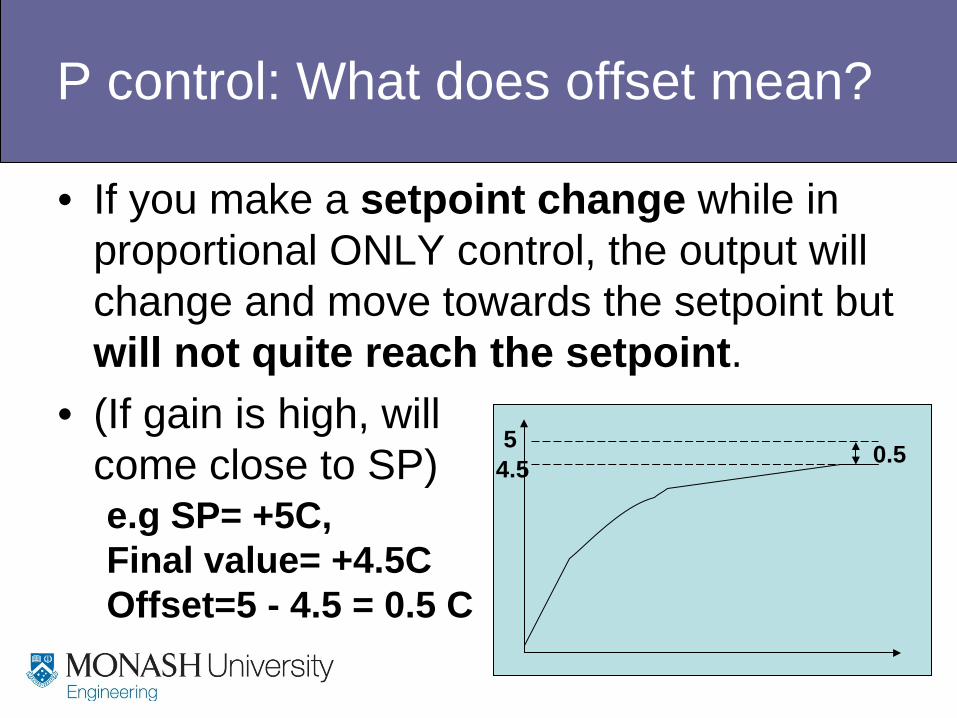
• If you make a setpoint change while in proportional ONLY control, the output will change and move towards the setpoint but will not quite reach the setpoint.
• (If gain is high, will come close to SP)
5 0.5 4.5
e.g SP= +5C, Final value= +4.5C Offset=5 - 4.5 = 0.5 C
P control: What does offset mean?
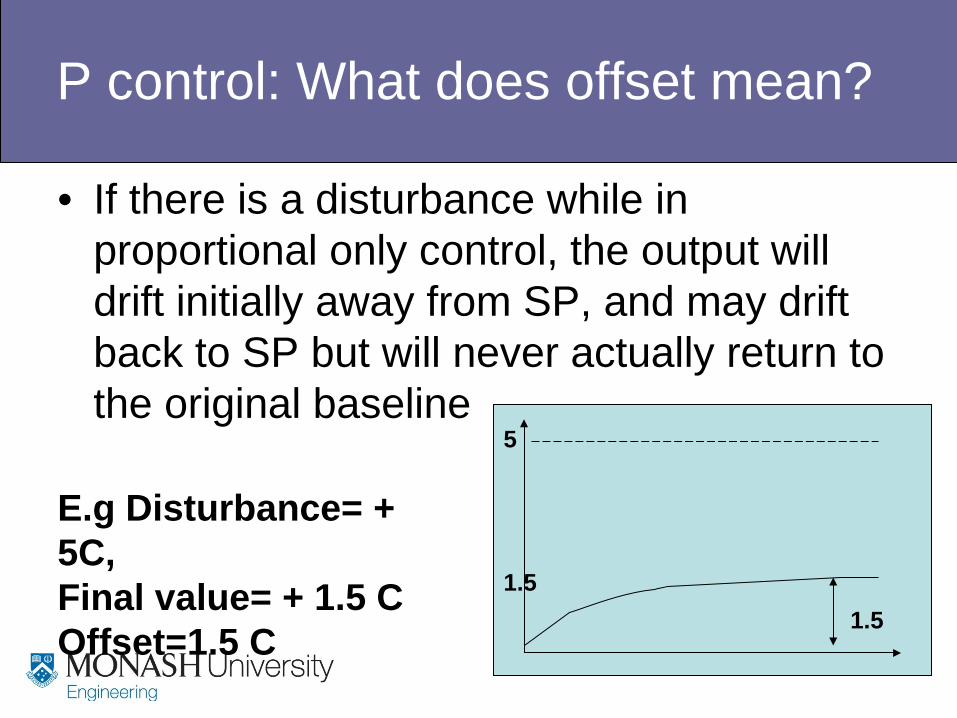
• If there is a disturbance while in proportional only control, the output will drift initially away from SP, and may drift back to SP but will never actually return to the original baseline
5
1.5 1.5
E.g Disturbance= + 5C, Final value= + 1.5 C Offset=1.5 C

Proportional Control can cause offset
Smith & Corropio
Always some Offset for P control Size of offset depends on size of controller gain Kc
First order closed loop response to a unit step in SP

P control for a disturbance
Smith
P=Offset H(t) reached steady state But did not return to h=6.0 after the disturbance
OFFSET

P control and offset
• In both cases, offset is the difference between the desired SS value and the actual SS value
• SS Offset = |desired output- actual output| • For a setpoint change, want output to reach
the setpoint : Desired = ∆SP • Offset∆SP=|SP-FVT| • For a disturbance, want output to stay
unaffected: Desired=0 • Offset∆D=|0-FVT| =FVT

P control offset calculation example
• Even for the most simple 1st order system – No valve or measurement dynamics so Gv=Gm=1 – First order response for process Gp and disturbance Gd
inputs
135
143
+=
+=
sG
sG
p
d

Proportional Control: SP Change
• Even for the most simple 1st order system:
pc
pc
GKGK
SPY
+=
1
Gp= 5 3s +1
Y Fs Kv =1 U
Km = 1
+ Kc
SP E +
-
Gd= 3 4s+1
D
+
≠1

Example: Proportional Control offset for SP Change
• Closed Loop response to a step in setpoint:
• Rearrange to standard form K/(τs+1):
1513
515
+
+
+=
sK
KK
SPY
c
c
c
c
c
c
c
pc
pc
KsK
sK
sK
GKGK
SPY
5135
1351
135
1 ++=
++
+=+
=
+
=
+=
c
c
coverall
K
KKK
513
515
τ Time Constant affected by Gain
Overall Gain ≠1
Evaluating P-control offset for ∆SP
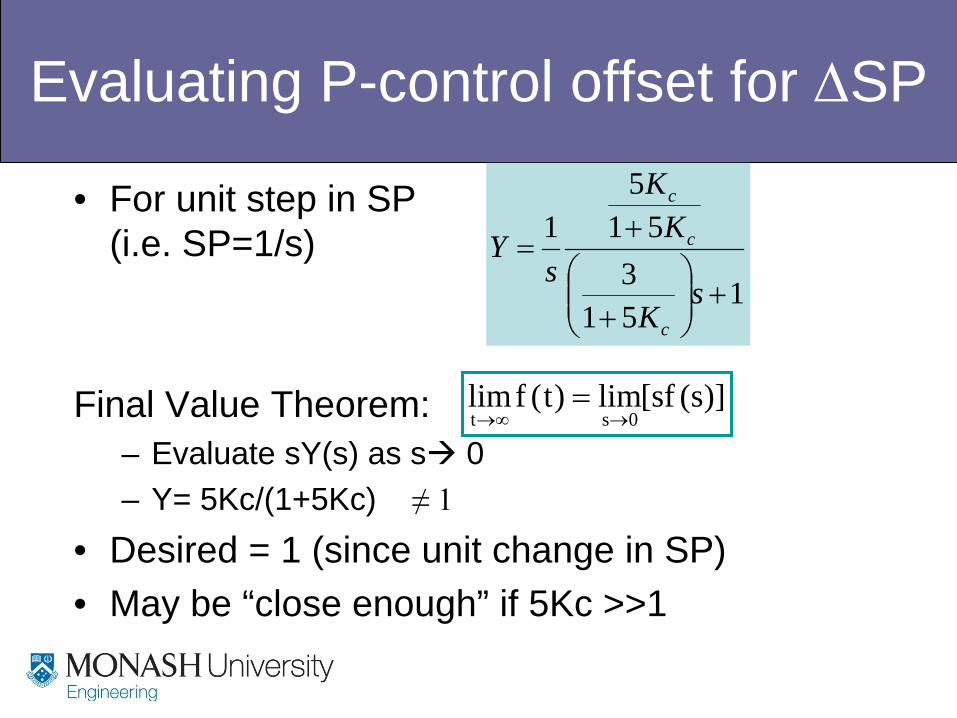
• For unit step in SP (i.e. SP=1/s)
Final Value Theorem: – Evaluate sY(s) as s 0 – Y= 5Kc/(1+5Kc) ≠ 1
• Desired = 1 (since unit change in SP) • May be “close enough” if 5Kc >>1
1513
515
1
+
+
+=
sK
KK
sY
c
c
c
)]s(sf[lim)t(flim0st →∞→
=

Proportional Offset
• SS Offset = |desired - actual| • For control:
c
c
c
Koffsetei
KKactual
511.
515
+=
+=
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4
K=1
K=2
5
Desired=SP for a SP change

Proportional Offset: Disturbance
• Even for the most simple 1st order system:
5
3s +1 Y Fs Kv =1
U
Km = 1
+ Kc
SP E +
-
3
4s+1 D
+
pc
d
GKG
DY
+=
1 ≠0

Proportional Control: Step in Disturbance variable
• Closed Loop Disturbance TF Y/D:
( )
+
++
+
+
=+++
+=
1513)14(
)13(513
)513)(14()13(3
sK
s
sK
Ksss
DY
c
c
c
)13513)(14(
3
1351
143
1+++
+=
++
+=+
=
sKss
sK
sGK
GDY
ccpc
d
Lead-lag response

Proportional Control: Step in Disturbance variable
• For unit step in D:
• Offset calculated using Final Value Theorem: – sY(s) as s 0 : Y= 3/(1+5Kc)
• Desired = 0 • Offset = 3/(1+5Kc)
( )
+
++
+
+
=1
513)14(
)13(513
1
sK
s
sK
sY
c
c

Disturbance Offset
• SS Offset = |desired - actual|
0 2 4 6 8 10 12 14 160
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Time (secs)
Amplit
ude
K=1
K=2
K=5
offsetK
actualc
=+
=513
Desired=0 For disturbances

Proportional Control: Calculating Offset for a Disturbance
2: Regulator Transfer Function
Y Gc
U
Gm Ym
Gd D
+ + YSP E
+ - Gv Gp
In process control YSP is usually constant & D(t) varies So YSP = 0
mGpGvGcG1dG
DY
+= This is the closed loop
DISTURBANCE Transfer Fn. (also known as regulator TF)
Exercise: Write down the Transfer Function Y/Ys for D(t) = constant
Proportional control of 1st order
• Closed loop means offset is unavoidable • Offset may not be important in practice
– Or, the offset could be critical – This depends on the values of gains in the process
and the process application! • Offset occurs for both setpoint changes and
process disturbances • Controller Gain directly affects overall process
gain AND time constant

Proportional control of Second Order processes
• P control of 2nd order process (Kv=1)
• Closed loop TF:
• For step in SP:
1222 ++=
ssK
G pp ξττ
pc
pc
KKssKK
SPY
++ξτ+τ=
1222
2nd order Y F
s Kv =1 U
Km = 1
+ Kc SP E
+ -
Gp
pc
pc
KKssKK
sY
+++=
121
22 ξττ

Proportional control of Second Order processes
• For step in SP
• System is still second order but Kc affects time constant τ AND damping coeff ξ
11
21
11
)12(1
22
22
+
++
+
+=
+++=
sKK
sKK
KKKK
sY
KKssKK
sY
pcpc
pc
pc
pc
pc
ξττ
ξττ

2nd Order P control Set point step change
• FVT:
• Dynamics
pc
pc)s(sY
KK1KK
0lim+
= →
pccontrol KK1+
τ=τ
pccontrol KK1+
ξ=ξ
11
21
11
22
+
++
+
+=
sKK
sKK
KKKK
sY
pcpc
pc
pc
ξττ
K values affect ξ Underdamped? Overdamped? Stability?

Example: P control 2nd order system
1s12s91Gp ++
=
ccontrol K1
2+
=ξ
0 5 10 150
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (secs)
Amplitu
de
K=1: ξ>1 overdamped
K=3: ξ=1 Critically damped
K=8: ξ>1 underdamped
• Gp TF is overdamped
• With control

Behaviour of the Proportional Controller
• As the gain increases control quality (error, or deviation from set point) starts to improve – But oscillation increases
• Beyond a certain gain instability occurs • For stable control there is a residual
steady state error – This is called the OFFSET
• P control will ALWAYS leave an offset • Increasing the gain reduces the offset

P vs PI control
• Discussed P control – 1st and 2nd order processes – SP and D changes
• Always have offset for P control • Possible to change stability of loop by
choice of Kc • What about PI control??
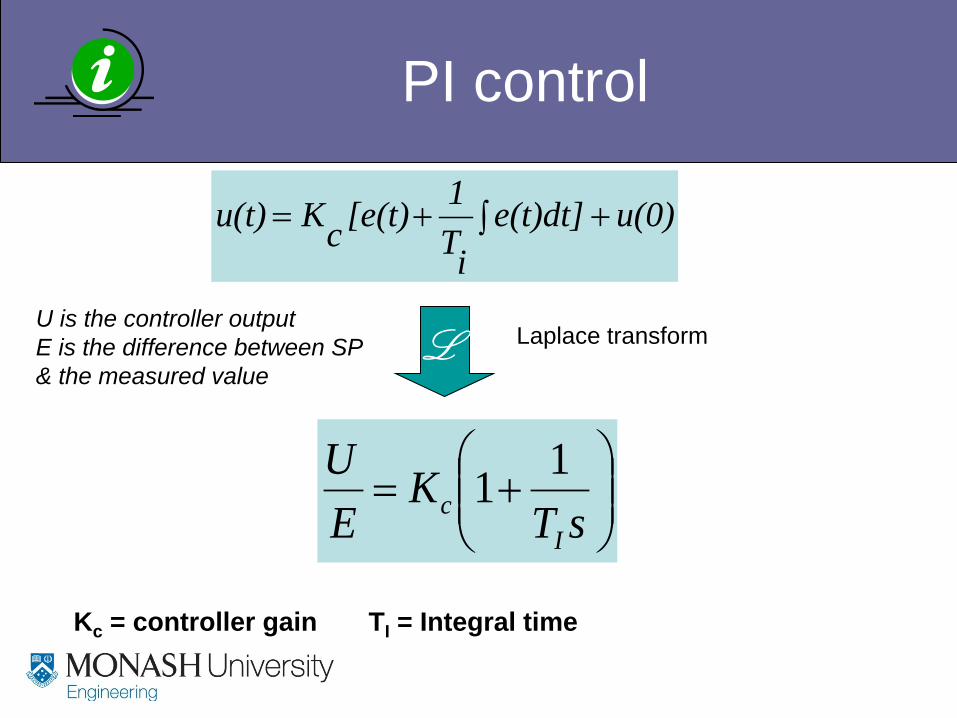
PI control
+=
sTK
EU
Ic
11
Laplace transform
∫ ++= u(0)e(t)dt]iT
1[e(t)cKu(t)
U is the controller output E is the difference between SP & the measured value
Kc = controller gain TI = Integral time
L

The Proportional Plus Integral Controller (PI)
• This is a two-term controller • The integral action eliminates offset • It also makes the control system less
stable • The PI controller is the most widely
used controller in the process industries
∫ ++= u(0)e(t)dt]iT
1[e(t)cKu(t)
]siT
1[1cKEU
+=
Ti is the integral time
1/Ti is the reset rate
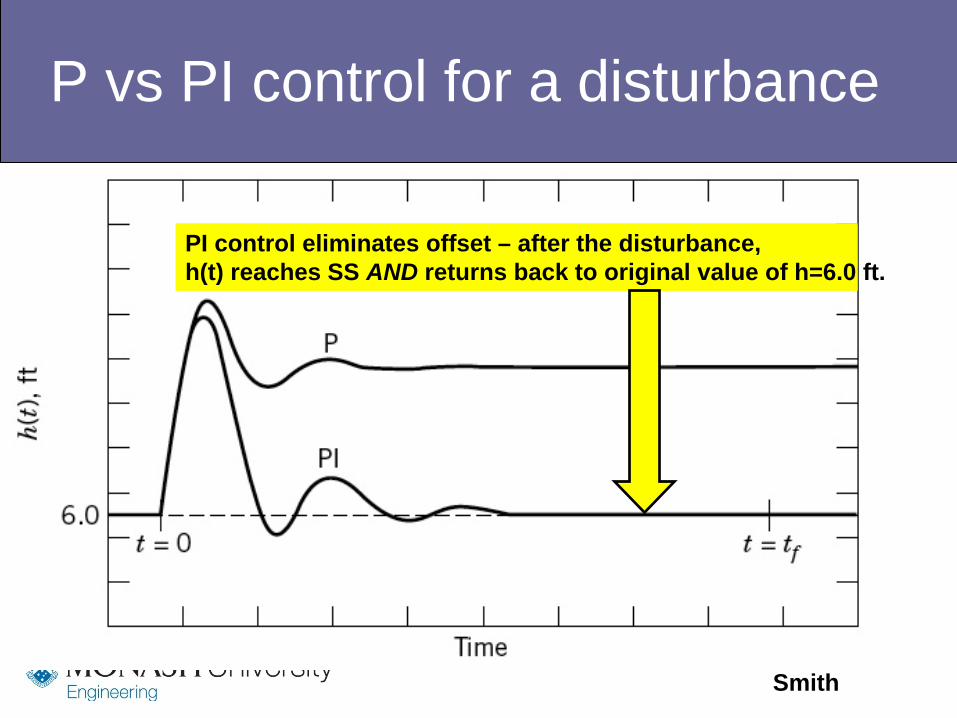
P vs PI control for a disturbance
Smith
PI control eliminates offset – after the disturbance, h(t) reaches SS AND returns back to original value of h=6.0 ft.
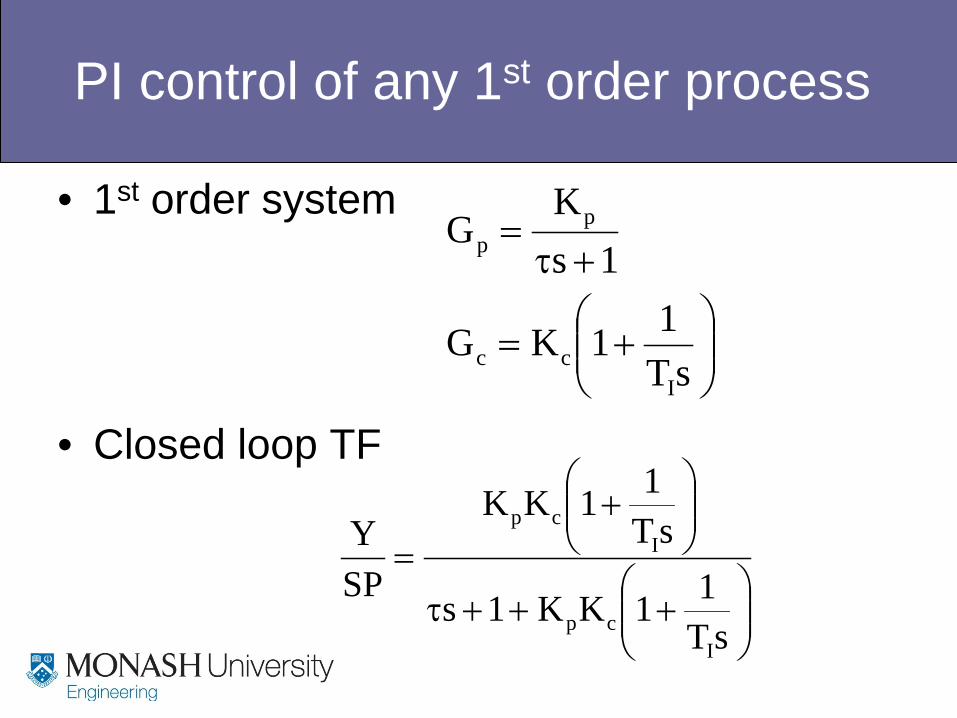
PI control of any 1st order process
• 1st order system
• Closed loop TF
+=
+τ=
sT11KG
1sK
G
Icc
pp
+++τ
+
=
sT11KK1s
sT11KK
SPY
Icp
Icp

PI control of any 1st order process
• Closed loop TF:
• Step change in SP = 1/s:
( )( )1)1(1
111
11
+++
+=
+++
+
=sTKKssT
sTKK
sTKKs
sTKK
SPY
IcpI
Icp
Icp
Icp
ττ
( )( )[ ]1)1(11
+++
+=
sTKKssTsTKK
sY
IcpI
Icp
τ
Multiply by (Tis)/(Tis)

PI control of any 1st order process
• Final Value Theorem:
– OFFSET = 0 - Action of Integral controller! • Dynamics of PI control of 1st order process:
– Like a second order system – Can be underdamped and oscillate
10lim )( = → ssY
( )( )[ ]1)1(11
+++
+=
sTKKssTsTKK
sY
IcpI
Icp
τ

Example: PI control of a 1st order process
5
3s +1 Y Fs Gv =1
U
Gm = 1
+ Gc
SP E +
-
3
4s+1 D
+
mpvc
pvc
GGGGGGG
SPY
+=
1
+=
sTG
ic
111

Example: PI control of a 1st order process
5
3s +1 Y Fs Kv =1
U
Km = 1
+ 1 + 1 TiS
SP E +
-
3
4s+1 D
+
mpvc
pvc
GGGGGGG
SPY
+=
1
)13(5111
)13(511
+
++
+
+
=
ssT
ssTSPY
I
I
+++
+
=
sTs
sT
I
I
11513
115
sTs
sT
I
I
563
55
++
+=

Example: 1st order +PI control
• Multiply by Tis/ Tis:
• Divide by 5:
56355
2 +++
=sTsT
sTSPY
II
I
Icontrol T6.0=τ II
Icontrol T
TT 6.06.0
6.0==ξ
12.16.01
2 +++
=sTsT
sTSPY
II
I
sTs
sTSPYCLTF
I
I
563
55
++
+==

Offset of PI control
• Use FVT to evaluate as sF(s) 0
• Assume unit step in SP • Put into equation and
evaluate using FVT • If Y=1 after SP=1, then Y
will reach the SP exactly (no offset)
• Independent of Ti value
12.16.01
2 +++
=sTsT
sTSPY
II
I
++
+=
12.16.011)( 2 sTsT
sTs
ssYFVTII
I
1100
10=
+++
=FVT
Offset elimination is the main advantage of PI control
Note:Integral time choice does affect stability

Example: 1st order +PI control
5sT6sT35sT5
SPY
I2
I
I
+++
=
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (secs)
TI=2
TI=1
TI=0.2 Kc=1 in this example
Shorter integral time means Less stable – need longer times To average out any oscillations Shorter integral times will cause oscillations
Setpoint increase of +1
No offset with PI Goes to +1 exactly

Error integrals
Smith & Corropio

P vs PI control for a disturbance
Smith
PI control eliminates offset – after the disturbance, h(t) reaches SS AND returns back to original value of h=6.0 ft.

PID Transfer Function
• Same procedure as used for P and PI control • Substitute the controller transfer function: • Use final value theorem to final SS value • Practice this in assignment and lab
++= s
sTK
EU
dI
c τ11
Laplace transform
∫ +++= u(0)]dtdee(t)dt
iT1[e(t)cKu(t) dτ
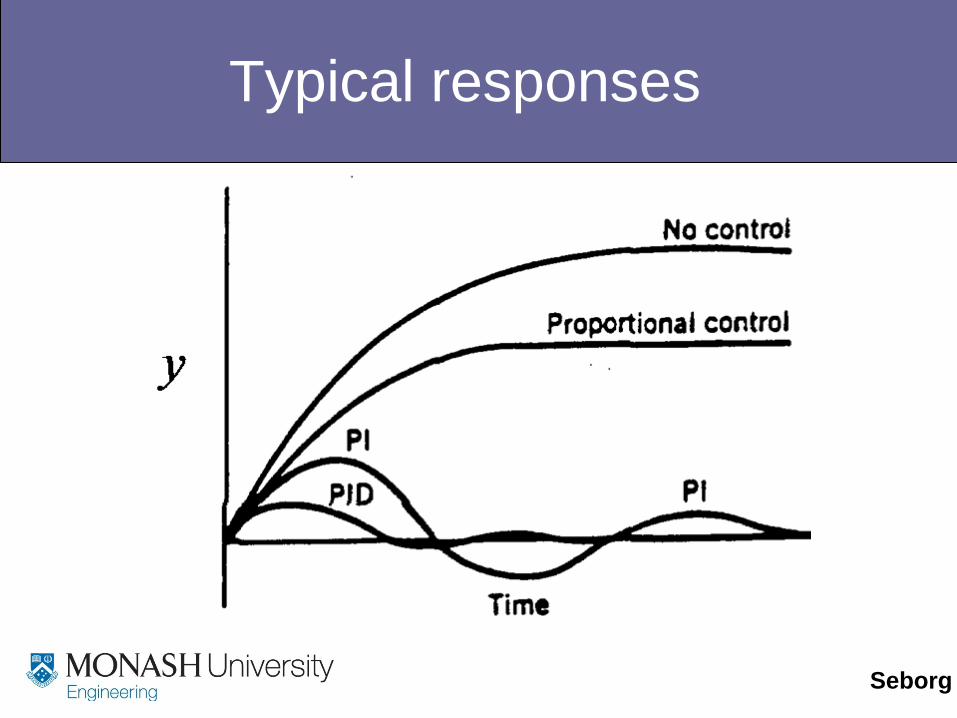
Typical responses
Seborg

Effects of the Different Control Actions
MODE VALUE TOO MUCH TOO LITTLEPROPORTIONAL Most stable Stability
decreasesLarger offset
Slower response
INTEGRAL (RESET)
Removes offset
Stability decreases
Longer oscillation
period
Slower return to set point
DERIVATIVE (RATE)
Increases stability Shorter
oscillation period
Stability increases
Amplify noise
Max benefit not achieved

PID Control Choice
Start
Can offset be tolerated?
Is there noise present?
Is dead time excessive?
Is capacity extremely small? Use PID
Use PI
Use P-Only Yes
Yes
Yes
Yes
No
No
No
No
Slide from Brent Youn

Which controller? P, PI or PID?
1. Basic pressure or level control – Basic P control OK – Can use PI to remove
offset 2. Flow control
– Fast response (can add I)
– DON’T want offset – Use PI
3. Temp or concentration – Usually SLOW response – PI usually slow or unstable – Use PID: Need D to
increase K and speed of response
All systems: Be careful with D
– Noise gives large D response
– e.g. splashing in liquids

Choice of Control Action
P only Simplest. Will give OFFSET
P + D Rare. Still have OFFSET. D action improves stability, but sensitive to noise. Usually restricted to batch temperature control.
P + I Most common I action Removes OFFSET. Stability is decreased: care!

Choice of Control Action
PID Widely used D action compensates for destabilising effect of I action, allowing higher P gains. D action sensitive to noise. PID (vs PI) IS recommended for temperature control; vapour pressure control; composition control (not with long sampling times, and not for pH).
PID (vs PI) NOT recommended for gas pressure, liquid pressure control; level, flow control.

CHE3162 Structure – Basic control
T1: Modelling & Laplace TF
T2: 1st Order responses
T3: 2nd Order responses
T4: Deadtime, Block Diagrams
T5: Frequency Response
T6: PID Control loops
T7: Tuning Control loops
T8: Cascade Control
T9: Feed Forward
& Ratio control
Single control loop







