PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
FACULDADE DE ENGENHARIA
CURSO DE ENGENHARIA ELÉTRICA
DISCIPLINA DE TRABALHO DE INTEGRAÇÃO
DESENVOLVIMENTO DE UM SISTEMA DE MONITORAMENTO E LOCALIZAÇÃO VIA SATÉLITE
E REDE CELULAR
ALUNO: MARCIO RUI CANTOS ORIENTADOR: JÚLIO CÉSAR MARQUES DE LIMA
Porto Alegre, junho de 2006.
2
Dedicatória
Aos meus pais
que na sua simplicidade souberam passar o indispensável para a formação do que sou.
A Ingrid
pelo apoio, incentivo e amor dedicados.
Às irmãs
pela compreensão e paciência neste tempo.
Ao professor Júlio
pelos ensinamentos passados com uma paciência inabalável.
3
Resumo
CANTOS, M.R. – Aluno da PUCRS, Departamento de Engenharia Elétrica, Porto
Alegre, RS.
LIMA, J.C.M, DE – Professor da PUCRS, Departamento de Engenharia Elétrica, Porto
Alegre, RS.
Este trabalho consiste no desenvolvimento do hardware e software de um sistema de
localização via satélite e monitoramento via sistema de comunicação móvel celular. Tem como
objetivo determinar a posição geográfica de veículos equipados com o sistema.
A posição geográfica é obtida por um módulo receptor GPS e comunicada por um
módulo celular através do envio e recebimento de mensagens de texto. Além da posição
geográfica o sistema de monitoramento e localização pode ser integrado ao sistema de controle
do veículo possibilitando o acompanhamento de eventos como abertura de portas, disparo do
sensor de alarme, botões de emergência bem como acionar bloqueadores de ignição, alarme,
trava de portas, etc.
Para o desenvolvimento do sistema foi projetada uma placa controladora com o
microprocessador MSC1211 da Texas Instruments interligado com o módulo receptor GPS da
Globalsat e ao módulo celular C18 da Motorola.
4
Sumário
1. Introdução................................................................................................................................8 2. Sistema Móvel Celular ..........................................................................................................10
2.1. Histórico do CDMA......................................................................................................11 2.2. Arquitetura da Rede CDMA .........................................................................................12
2.2.1. Estação Móvel (MS – Móbile Station)..................................................................13 2.2.2. Estação Rádio Base (ERB)....................................................................................13 2.2.3. Controlador de Estação Base (BSC – Base Station Controller)............................13 2.2.4. Central de Comutação e Controle (CCC)..............................................................13 2.2.5. Registro de Assinantes Locais (HLR – Home Location Register .........................14 2.2.6. Resgistro de Assinantes Locais (VLR – Visitor Location Register).....................14
2.3. Aspectos de Transmissão e de Rede .............................................................................14 2.3.1. Freqüências de Operação (MHz)...........................................................................15 2.3.2. Canalização ...........................................................................................................15 2.3.3. Capacidade do CDMA ..........................................................................................16
2.4. Serviços .........................................................................................................................17 2.4.1. Serviços de Transmissão de Dados .......................................................................17
2.5. Módulo Motorola C18...................................................................................................18 2.5.1. Características .......................................................................................................19
3. Sistema de Posicionamento Global .......................................................................................20 3.1. A Origem.......................................................................................................................20 3.2. O que é ..........................................................................................................................22
3.2.1. Segmento Espacial ................................................................................................22 3.2.2. Segmento de Controle ...........................................................................................24 3.2.3. Segmento de Usuário ............................................................................................25
3.3. Serviços .........................................................................................................................26 3.4. Operadores de Sinais .....................................................................................................27
3.4.1. NAVSTAR GPS....................................................................................................27 3.4.2. GLONASS ............................................................................................................27 3.4.3. Galileo ...................................................................................................................29
3.5. Operação........................................................................................................................32 3.5.1. O Posicionamento .................................................................................................32 3.5.2. Tempo Preciso.......................................................................................................35 3.5.3. Mensagens de GPS................................................................................................36 3.5.4. Tempo e Posição ...................................................................................................38 3.5.5. Aquisição de Sinais ...............................................................................................39 3.5.6. Fontes de Imprecisão.............................................................................................40 3.5.7. Mecanismo de Correção........................................................................................44
4. Receptor GPS ........................................................................................................................47 4.1. Receptor Globalsat ET-102...........................................................................................47 4.2. Antena Receptora ..........................................................................................................49 4.3. Integração ......................................................................................................................50 4.4. Protocolo .......................................................................................................................51
5
5. Desenvolvimento de Hardware .............................................................................................52 5.1. Placa de Controle ..........................................................................................................52 5.2. Conversor TTL para RS 232 .........................................................................................54 5.3. Interfaces .......................................................................................................................56 5.4. Circuito de Entrada........................................................................................................56 5.5. Circuito de Saída ...........................................................................................................57 5.6. Alimentação ..................................................................................................................58
6. Software de Controle.............................................................................................................59 7. Conclusão ..............................................................................................................................62 8. Anexos...................................................................................................................................63 9. Referências Bibliográficas ....................................................................................................64
6
Lista de Figura
Figura 2.1 – Estrutura de uma Rede CDMA.................................................................................12 Figura 2.2 – Carregamento do Canal RF.......................................................................................16 Figura 2.3 - Modulo C18...............................................................................................................18 Figura 2.4 –Placa Módulo C18 .....................................................................................................19 Figura 3.1 - Foto de Um Satélite da Constelação GPS .................................................................23 Figura 3.2 – Constelação de Satélites do GPS ..............................................................................24 Figura 3.3 – Estações de Controle do GPS ...................................................................................25 Figura 3.4 – Satelite da Constelação GLONASS..........................................................................29 Figura 3.5 – Satélite da Constelação Galileo. ...............................................................................31 Figura 3.6 – Esquema de Trilateração...........................................................................................33 Figura 3.7 – Arranjo do Sistema de Posicionamento ....................................................................34 Figura 3.8 – Diagrama em Blocos do Receptor GPS....................................................................39 Figura 3.9 – Baixa Diluição da Precisão .......................................................................................42 Figura 3.10 – Precisão Prejudicada pela Disposição dos Satélites ...............................................42 Figura 3.11 – Precisão Prejudicada pela Obstrução do Sinal........................................................43 Figura 3.12 – Conceito de GPS Diferencial ..................................................................................45 Figura 4.1 – Receptor GPS Vista Frontal......................................................................................48 Figura 4.2 – Receptor GPS Vista Lateral ......................................................................................49 Figura 4.3 – Foto Modulo Receptor ET-102.................................................................................49 Figura 4.4 – Diagrama da Antena DAM 1575 ..............................................................................50 Figura 4.5 – Foto da Antena DAM 1575 ......................................................................................50 Figura 5.1 – Foto da Placa Controladora.......................................................................................53 Figura 5.2 – Esquemático 1 da Placa Controladora ......................................................................53 Figura 5.3 – Parte 2 Esquemático da Placa Controladora .............................................................54 Figura 5.4 – Esquemático da Placa Conversora............................................................................55 Figura 5.5 – Foto da Placa Conversora .........................................................................................55 Figura 5.6 – Foto da Placa Conversora Montada sobre o GPS .....................................................56 Figura 5.7 – Esquema Circuitos de Entrada..................................................................................57 Figura 5.8 – Esquema Circuitos de Saída .....................................................................................58 Figura 6.1 – Fluxograma do Software de Controle Programa Principal. ......................................60 Figura 6.2 – Fluxograma do Software de Atendimento da Interrupção........................................61

7
Lista de Tabelas
Tabela 2.1– Padrão de Freqüências em uso nos Estados Unidos..................................................15 Tabela 2.2 – Padrão de Freqüências em uso nos Estados Unidos.................................................17 Tabela 3.1 – Fatores de Imprecisão...............................................................................................43 Tabela 4.1 – Descrição de Pinos ...................................................................................................48 Tabela 4.2 – Protocolo NMEA......................................................................................................51
8
1. Introdução
A crescente demanda por soluções que otimizem processos e reduzam custos estão
provocando um grande avanço na área de logística, a qual possibilita um melhor aproveitamento
de rotas de coleta e entrega de cargas, minimizando tempo e custo. Também faz-se necessário
melhorar a segurança dessas cargas. Estas demandas abriram espaço para a criação dos sistemas
de localização e monitoramento. Ainda no campo da segurança o crescimento da violência está
levando à solução de rastreamento também para pessoas físicas.
Dentre as tecnologias disponíveis utilizaremos o sistema de posicionamento global (GPS
Global Positioning System) para determinar as coordenadas geográficas e o sistema móvel
celular como interface de comunicação, sendo o conjunto gerenciado por uma placa baseada em
um microcontrolador do tipo MSC1211.
Esse sistema pode ser implementado por exemplo, de forma individual, em um veículo,
com a definição prévia de quais usuários poderão interagir e obter informações do estado do
mesmo, através do cadastramento de celulares. Assim o proprietário tem o controle e
responsabilidade sobre o sistema. Também pode ser montada uma central de supervisão para
acompanhar os diversos dispositivos. Com isso a localização e o monitoramento serão tratados
como serviços.

9
10
2. Sistema Móvel Celular
Na década de 80, começam a ser desenvolvidos os primeiros padrões digitais da chamada
segunda geração. A primeira geração foi responsável pelo padrão analógico. As pesquisas
sinalizavam principalmente três novos padrões: TDMA (Time Division Multiple Acess), CDMA
(Code Division Multiple Acess) e GSM (Global System for Mobile Communication).
Comparando as capacidades dos sistemas de primeira geração com os de segunda obtém-
se as seguintes relações de desempenho:
• CDMA – 8x capacidade do analógico;
• TDMA – 3x capacidade do analógico;
• GSM – 3x capacidade do analógico;
O sistema de telefonia móvel celular surgiu, no Brasil, na década de 90 e se popularizou
após a privatização do sistema Telebrás. Hoje as duas tecnologias que dominam o mercado
brasileiro são o GSM e o CDMA. Considerando esse fato optou-se por utilizar um módulo
celular da Motorola que é fabricado nas duas tecnologias. Se for CDMA recebe a denominação
C18 e se for GSM recebe a denominação G18. A escolha para o desenvolvimento deste projeto
foi a do módulo Motorola C18.
No final dos anos 90, a ANATEL, órgão regulador de telecomunicações no Brasil,
regulamenta a telefonia móvel como SMC (Sérvio Móvel Celular), posteriormente substituído
pelo modelo SMP (Serviço Móvel Pessoal).
11
2.1. Histórico do CDMA
É uma tecnologia militar usada pela primeira vez pelos aliados na Segunda Guerra
Mundial para dificultar a interceptação de suas transmissões. Eles decidiram transmitir dados
sobre várias freqüências, ao invés de utilizar uma freqüência única, dificultando assim para os
alemães, capturar o sinal completo. A empresa Qualcomm produziu os chips de comunicação
CDMA e detém os direitos de patente sobre a tecnologia. Por essa razão a implantação de um
sistema de comunicação móvel com tecnologia CDMA torna-se mais cara devido ao pagamento
de royaltes.
O CDMA utiliza espalhamento espectral como meio de acesso para permitir que vários
usuários compartilhem uma mesma banda de freqüência. Permite assim uma melhor utilização
do espectro, possibilitando um aumento de capacidade dos sistemas celulares.
A norma IS-95 da EIA/TIA (Telecommunications Industry Association), nos Estados
Unidos, padronizou os sistemas celulares de segunda geração, conhecidos popularmente como
padrão CDMA, ou CDMAone e que são baseados no IS-95. Essa tecnologia foi desenvolvida em
grande parte pela Qualcomm.
O padrão IS-95, faz uso da técnica de obtenção de acesso ao canal por CDMA (Code
Division Multiple Acess), vindo daí então a analogia direta ao nome. Nesse sentido, o que o
padrão caracteriza é uma estrutura onde cada canal alocado determina um código, na
identificação do usuário e na manutenção de aspectos como privacidade do sistema. O sistema
utiliza uma portadora de 1,25 MHz de banda, que é compartilhada por todos os usuários que
podem transmitir simultaneamente, onde cada conexão é provida de um código particular.
12
2.2. Arquitetura da Rede CDMA
O sistema CDMA tem a mesma estrutura básica dos sistemas celulares e oferece as
mesmas funcionalidades básicas associadas à mobilidade como roaming e handoff entre células.
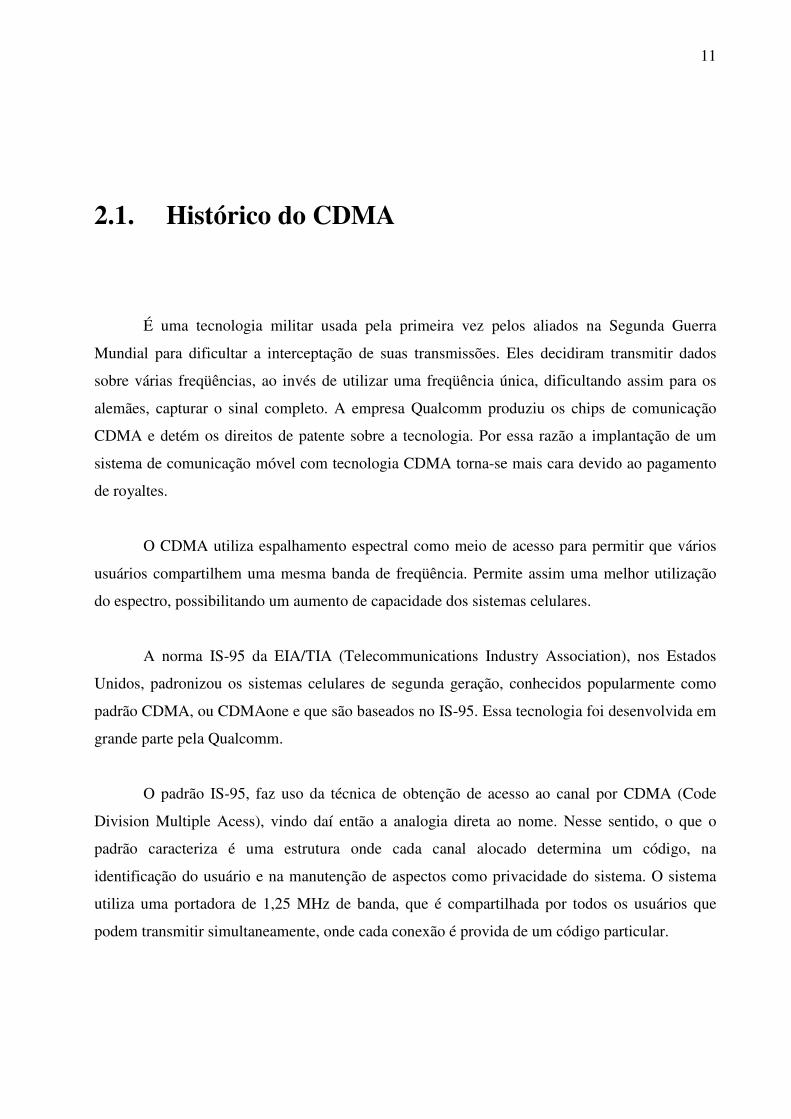
A arquitetura básica de um sistema celular CDMA (IS-95) está representada na figura
2.1.
Figura 2.1 – Estrutura de uma Rede CDMA
A especificação da arquitetura CDMA, não difere muito das outras arquiteturas como
GSM. Em sua base têm-se os mesmos componentes de sistema. A diferença primordial está na
estrutura funcional. Os mecanismos usados por cada padrão para fazer o controle e a
administração da alocação de canais, registros do sistema e demais atividades é que diferenciam
as arquiteturas.

13
2.2.1. Estação Móvel (MS – Móbile Station)
É o terminal utilizado pelo assinante. A estação móvel é identificada por um MIN
(Móbile Identification Number). O equipamento dispõe ainda de um número de série eletrônico
(ESN). No sistema CDMA o equipamento móvel está associado ao número telefônico.
2.2.2. Estação Rádio Base (ERB)
Equipamento encarregado da comunicação com as estações móveis em uma determinada
área que constitui uma célula. Essa comunicação ocorre através da interface de rádio, ou
interface aérea.
2.2.3. Controlador de Estação Base (BSC – Base Station Controller)
Controla um grupo de estações rádio base. Em alguns sistemas CDMA as funções do
BSC são implementadas na CCC – central de comutação e controle.
2.2.4. Central de Comutação e Controle (CCC)
É a central responsável pelas funções de comutação e sinalização para as estações móveis
localizadas em uma área geográfica designada como área da CCC.
14
2.2.5. Registro de Assinantes Locais (HLR – Home Location Register
O registro de assinantes locais é a base de dados que contém informações sobre os
assinantes de um sistema celular.
2.2.6. Resgistro de Assinantes Locais (VLR – Visitor Location Register)
É a base de dados que contém informações sobre os assinantes em visita (roaming) a um
sistema celular.
2.3. Aspectos de Transmissão e de Rede
No processo de transmissão pelo método do CDMA a voz é primeiramente codificada,
passa por um expansor que a multiplica por uma seqüência pré-estabelecida e única para cada
estação móvel. O sinal de espectro agora espalhado é modulado em amplitude e transmitido.
15
2.3.1. Freqüências de Operação (MHz)
No Brasil o CDMA tem sido utilizado pelas operadoras na faixa de 800 MHz nas Bandas
A e B. Teve também um uso limitado na freqüência de 1,9 GHz para Telefonia Fixa (WLL) uma
vez que essa faixa não está ainda disponível no Brasil para Telefonia Celular.
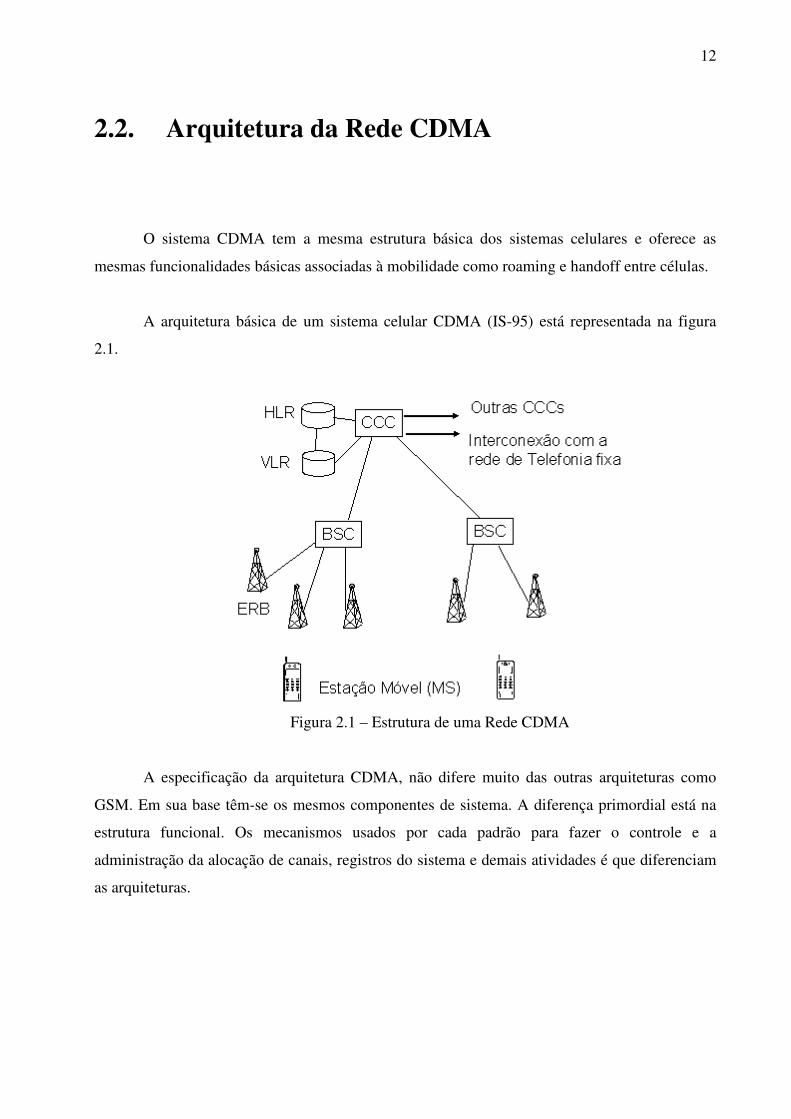
Nos Estados Unidos o CDMA IS-95 padronizou as seguintes faixas de freqüência:
Tabela 2.1– Padrão de Freqüências em uso nos Estados Unidos
� �������� �������
� ������������������� �������� �������
�������� ������������ �������� ��������
� ���!�"����"�#��$#�%&'"()� �*�+#�" !) �������(� ���,� ��� ���
2.3.2. Canalização
As bandas do CDMA são divididas em canais de RF, onde cada canal consiste de um par
de freqüências (transmissão e recepção) com 1,25 MHz de banda cada.
O CDMA utiliza a técnica de “Spread Spectrum” na qual o sinal de informação é
codificado utilizando-se uma chave de código que provoca o seu espalhamento espectral em uma
banda transformando-o aparentemente em ruído. Os códigos podem ser ortogonais (Walsh) ou
PN (Pseudo-noise). Um bit desse tipo de código é conhecido como chip, e a taxa de bits desse
código, de chip-rate. Esse tipo de espalhamento espectral é denominado espalhamento espectral
por seqüência direta.
16
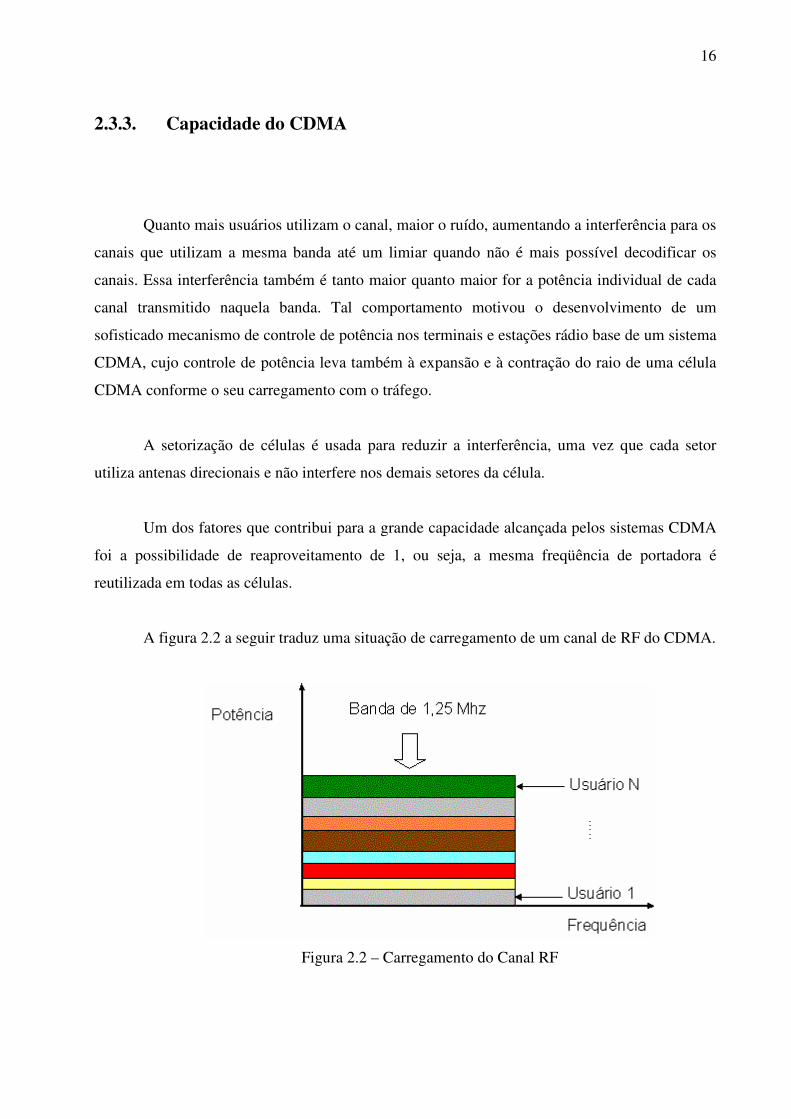
2.3.3. Capacidade do CDMA
Quanto mais usuários utilizam o canal, maior o ruído, aumentando a interferência para os
canais que utilizam a mesma banda até um limiar quando não é mais possível decodificar os
canais. Essa interferência também é tanto maior quanto maior for a potência individual de cada
canal transmitido naquela banda. Tal comportamento motivou o desenvolvimento de um
sofisticado mecanismo de controle de potência nos terminais e estações rádio base de um sistema
CDMA, cujo controle de potência leva também à expansão e à contração do raio de uma célula
CDMA conforme o seu carregamento com o tráfego.
A setorização de células é usada para reduzir a interferência, uma vez que cada setor
utiliza antenas direcionais e não interfere nos demais setores da célula.
Um dos fatores que contribui para a grande capacidade alcançada pelos sistemas CDMA
foi a possibilidade de reaproveitamento de 1, ou seja, a mesma freqüência de portadora é
reutilizada em todas as células.
A figura 2.2 a seguir traduz uma situação de carregamento de um canal de RF do CDMA.
Figura 2.2 – Carregamento do Canal RF
17
2.4. Serviços
Os sistemas CDMA (IS-95) oferecem, além dos serviços de telefonia (voz), dezenas de
serviços suplementares, tais como identificação do número chamador, chamada em espera, siga-
me e conferência
2.4.1. Serviços de Transmissão de Dados
O Serviço de Mensagens Curtas (SMS) tem suporte do IS-41 para assinantes em
roaming. Os Serviços de Mensagem Multimídia (MMS) que permitem aos assinantes móveis
enviar fotos, vídeos e áudio, assim como o acesso a Internet têm sido os motivadores para a
evolução dos sistemas CDMA no sentido de oferecerem conexões de dados com altas taxas de
transmissão. Essa evolução para serviços de terceira geração com taxas de dados de até 2 Mbit/s
vem sendo padronizada pelo 3rd Generation Partnership Project 2 (3GPP2) e mantém a
compatibilidade com os sistemas IS-95 e sua estrutura de canais de RF de 1,25 MHz.
A tabela 2.2 apresenta os padrões em desenvolvimento.
Tabela 2.2 – Padrão de Freqüências em uso nos Estados Unidos
-�#����� ��-� �.��-� �-�
+�("���/)��(0!�1"��
*2����3����,��4�3�����56�
�4�3�7�8�41��4�3�7�8�48�
+�7��0��0�0� �*���#)(�,� �.��9:)�; � ���9:)�; � �.���:)�; �
O CDMA 1xEV teve sua evolução em duas etapas:
18
O 1xEV-DO (Data Only) onde uma portadora de 1,25 MHZ é dedicada apenas para
dados e, posteriormente para 1xEV-DV (Data and Voice) onde uma portadora poderá ser
utilizada para voz e dados.
2.5. Módulo Motorola C18
O equipamento celular escolhido para o desenvolvimento do projeto é o Motorola C18,
distribuído no Brasil pela Informat Technology, voltado para transmissão de dados através das redes de
celulares de tecnologia CDMA. Possui interface de comunicação padrão que lhe permite ser conectado a
diversos outros equipamentos dos quais e para os quais se queiram transmitir informações remotas.
As figuras 2.3 2 2.4 apresentam o aspecto físico deste equipamento.
Figura 2.3 - Modulo C18
19
Figura 2.4 –Placa Módulo C18
2.5.1. Características
O Módulo C18 tem as seguintes características técnicas:
• Tensão de operação 5 a 35 V;
• Interfce RS 232 Serial Assíncrona de 9 linhas em um conector DB9;
• Protocolo dos Comandos AT – IS707 – IS95B.
20
3. Sistema de Posicionamento Global
3.1. A Origem
Como em muitos ramos da ciência, um grande impulso foi dado à navegação durante a
Segunda Guerra Mundial, quando a eletrônica, definitivamente, passou a servir como base para a
instrumentação. Surgiram, nessa época, dois importantes sistemas, conhecidos pelos nomes de
“Loran” (de “long range navigation”, ou “navegação de longo alcance”) e “Decca”. Ambos
baseados em ondas de rádio de alta freqüência emitidas por estações fixas, e captadas pelo
veículo em movimento. No veículo, um receptor era capaz de detectar o intervalo de tempo
decorrido entre a emissão do sinal de rádio e sua recepção, podendo, assim, determinar a
distância entre o emissor e o receptor. Conseguindo determinar as distâncias de 3 estações
emissoras distintas, e sabendo suas respectivas posições, através do método da trilateração, o
receptor poderia determinar a sua própria posição.
Embora tenham sido utilizados até recentemente, esses sistemas apresentavam algumas
limitações. Em primeiro lugar, o alcance de uma estação emissora era, em geral, restrito a
algumas centenas de quilômetros. No caso da navegação marítima, por exemplo, essa restrição
não prejudicava a navegação costeira, mas impedia o uso desses sistemas para navegação em alto
mar.
O sistema “Omega”, semelhante aos sistemas Loran e Decca, ao contrário desses,
utilizava-se de ondas de baixa freqüência, que apresentavam maior alcance. Assim, com apenas
21
8 estações fixas, localizadas na Noruega, Libéria, Havaí, Dakota do Norte (Estados Unidos), ilha
de Diego Garcia (Oceano Índico), Argentina, Austrália e Japão, sua abrangência era mundial.
Entretanto, da mesma forma que seus predecessores, seu uso acabou sendo limitado, prejudicado
por interferências elétricas, más condições atmosféricas e variações topográficas. Com isso,
certas aplicações, onde se fazia necessária uma maior precisão no posicionamento, não era
possível quando utilizavam os sistemas Loran, Decca e Omega.
Dez anos após o início da “Era Espacial” (com o lançamento do satélite soviético Sputnik
I, em 1957), entrava em operação o “Navy Navigation Satellite System”, mais conhecido por
“Transit”. O princípio de seu funcionamento baseava-se no chamado “efeito Doppler”, pelo qual
a freqüência de um sinal emitido por uma fonte em deslocamento é alterada. Até recentemente
ainda muito usado pela navegação marítima (especialmente pela transoceânica), o sistema
Transit apresentava algumas limitações: o pequeno número de satélites e a sua baixa órbita
impediam que se pudesse obter a posição do receptor a qualquer momento. Por se basear no
efeito Doppler, apresentava elevada imprecisão quando o receptor estava em movimento.
Finalmente, em 1973, nascia um novo sistema de navegação e posicionamento, resultado
indireto de todo esse conhecimento tecnológico acumulado ao longo de muitos anos: o
“Navigation Satellite with Time and Ranging / Global Positioning System”. Mais conhecido
como “NAVSTAR/GPS”, ou, simplesmente, “GPS”. Esse sistema foi concebido com fundos do
Departamento de Defesa dos Estados Unidos para fornecer a posição instantânea e a velocidade
de um ponto sobre a superfície terrestre, ou próximo a ela. Inicialmente para fins militares, o
GPS é hoje utilizado por diversos segmentos da sociedade civil e seu uso tende a se popularizar
cada vez mais.
Desde 1973, estima-se que o Governo norte-americano tenha investido algumas dezenas
de bilhões de dólares no Projeto. Nesse período, algumas alterações de ordem técnica foram
introduzidas, e os constantes aprimoramentos da tecnologia têm provocado um progressivo
aumento na precisão. Hoje, já é possível obter-se uma precisão da ordem de centímetros para a
localização de um determinado ponto.
22
3.2. O que é
É um sistema de rádionavegação que cobre todo o mundo. O Sistema de Posicionamento
Global é composto de três segmentos: o segmento espacial, composto por satélites artificiais que
emitem sinais eletromagnéticos; o segmento de controle, composto pelas estações terrestres que
mantêm os satélites em funcionamento; e o segmento dos usuários, composto pelos receptores
que captam os sinais enviados pelos satélites e, com eles, calculam sua posição.
3.2.1. Segmento Espacial
Foram construídos 11 protótipos de satélites pela empresa “Rockwell International”.
Esses satélites constituíram o chamado “bloco I”. Mais tarde, entraram em operação os satélites
do “bloco II”, para o qual foram construídos vinte e oito satélites, dos quais foram lançados vinte
e quatro. Vinte e um deles estão normalmente em operação, e os demais ficam como reserva.
Cada satélite é dotado de painéis solares retráteis que constituem a fonte de energia dos
mesmos. Quando estendidos, esses painéis conferem ao satélite um comprimento de
aproximadamente 5m. Sua massa, em órbita, é de aproximadamente uma tonelada. A figura 3.1
apresenta o aspecto destes satélites.
23
Figura 3.1 - Foto de Um Satélite da Constelação GPS
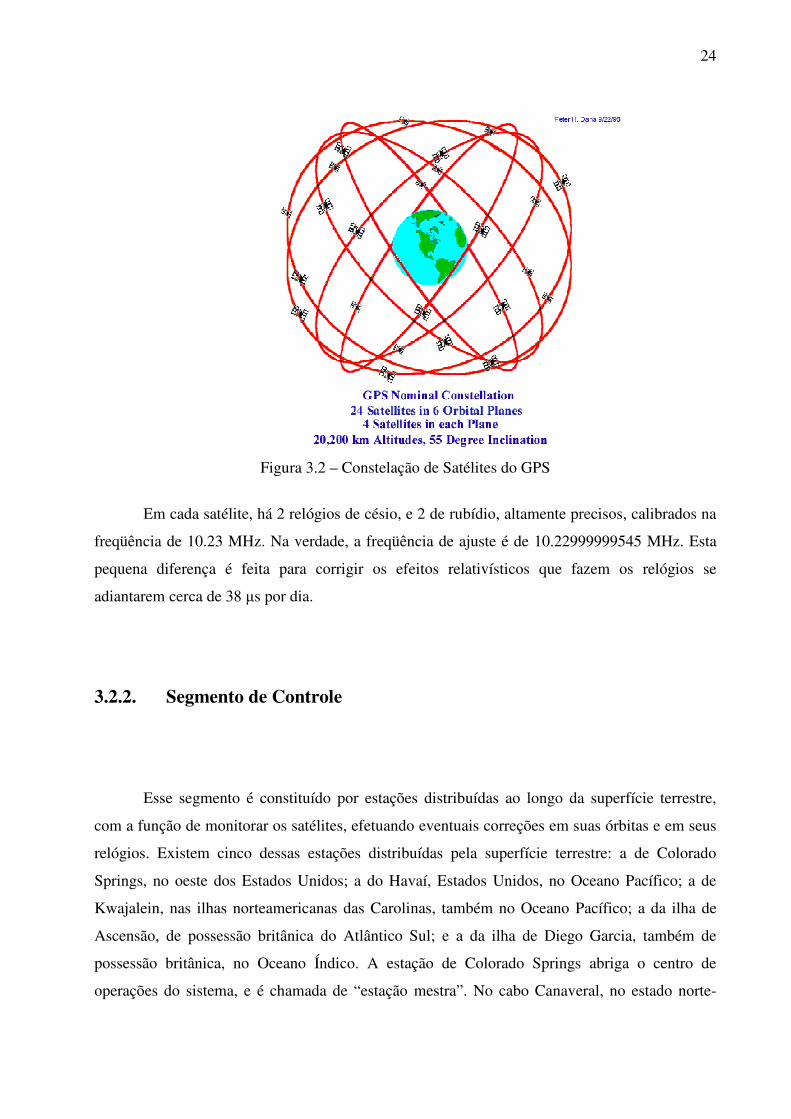
A órbita de um satélite é percorrida em aproximadamente 12 horas, o que significa que
ele executa 2 voltas em torno da Terra a cada dia. Na verdade, a órbita é completada em 11 horas
e 58 minutos e, com isso, ele aparece no horizonte 4 minutos mais cedo a cada dia. Os 24
satélites estão distribuídos em 6 órbitas distintas, o que faz com que qualquer ponto da superfície
terrestre tenha, próximo a ele, pelo menos 4 satélites acima da linha do horizonte. O plano de
cada órbita forma, com o plano do Equador terrestre, um ângulo de 55 graus. A altura em que
cada satélite executa sua órbita, em relação à da Terra, é de, aproximadamente, 20.000km.
Ao contrário dos satélites comumente utilizados para comunicações, os satélites GPS não
são geoestacionários, isto é, não permanecem numa posição fixa em relação à Terra,
acompanhando a sua rotação. Entre os motivos para esse fato, pode-se citar que, para ser
geoestacionário, um satélite tem que permanecer no plano equatorial; se todos eles se situassem
nesse plano, os pontos mais próximos aos pólos teriam uma cobertura menos favorável. Mas o
principal motivo para se querer ter os satélites em rotação em torno da Terra é o de que,
periodicamente, cada um deles passa próximo a uma estação de controle, podendo, assim, enviar
e receber informações sobre sua órbita. A figura 3.2 representa a distribuição de satélites na
constelação GPS.
24
Figura 3.2 – Constelação de Satélites do GPS
Em cada satélite, há 2 relógios de césio, e 2 de rubídio, altamente precisos, calibrados na
freqüência de 10.23 MHz. Na verdade, a freqüência de ajuste é de 10.22999999545 MHz. Esta
pequena diferença é feita para corrigir os efeitos relativísticos que fazem os relógios se
adiantarem cerca de 38 �s por dia.
3.2.2. Segmento de Controle
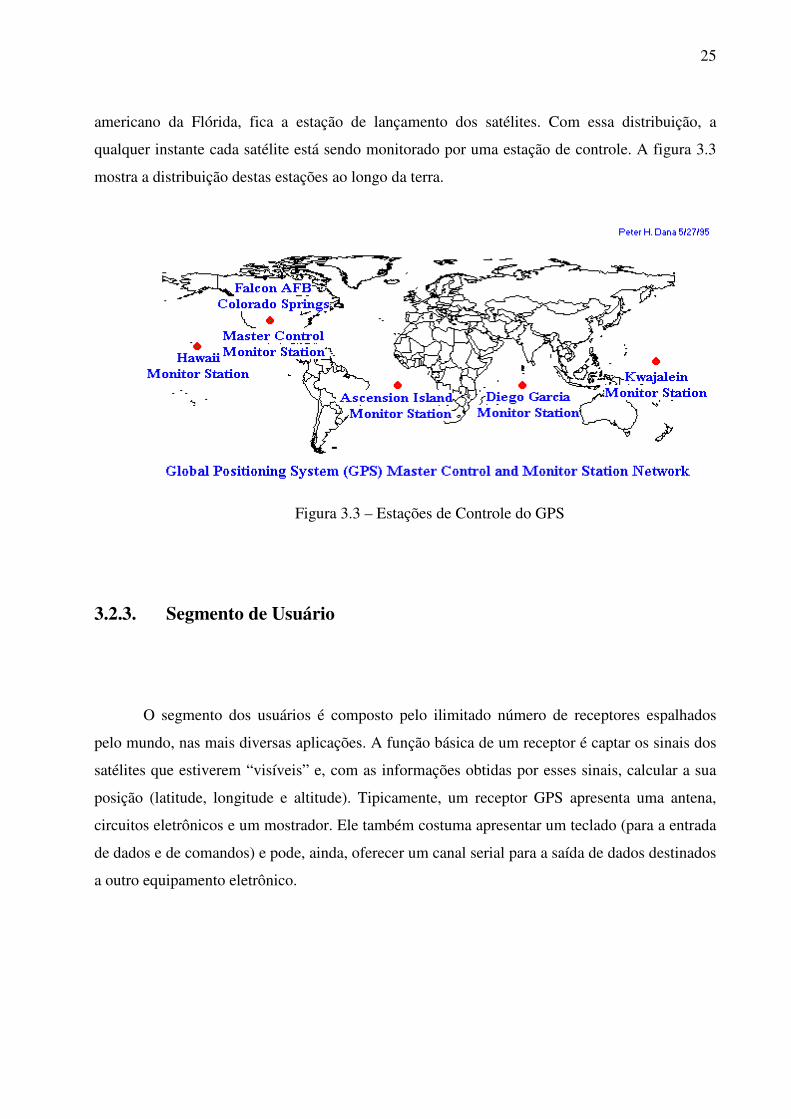
Esse segmento é constituído por estações distribuídas ao longo da superfície terrestre,
com a função de monitorar os satélites, efetuando eventuais correções em suas órbitas e em seus
relógios. Existem cinco dessas estações distribuídas pela superfície terrestre: a de Colorado
Springs, no oeste dos Estados Unidos; a do Havaí, Estados Unidos, no Oceano Pacífico; a de
Kwajalein, nas ilhas norteamericanas das Carolinas, também no Oceano Pacífico; a da ilha de
Ascensão, de possessão britânica do Atlântico Sul; e a da ilha de Diego Garcia, também de
possessão britânica, no Oceano Índico. A estação de Colorado Springs abriga o centro de
operações do sistema, e é chamada de “estação mestra”. No cabo Canaveral, no estado norte-
25
americano da Flórida, fica a estação de lançamento dos satélites. Com essa distribuição, a
qualquer instante cada satélite está sendo monitorado por uma estação de controle. A figura 3.3
mostra a distribuição destas estações ao longo da terra.
Figura 3.3 – Estações de Controle do GPS
3.2.3. Segmento de Usuário
O segmento dos usuários é composto pelo ilimitado número de receptores espalhados
pelo mundo, nas mais diversas aplicações. A função básica de um receptor é captar os sinais dos
satélites que estiverem “visíveis” e, com as informações obtidas por esses sinais, calcular a sua
posição (latitude, longitude e altitude). Tipicamente, um receptor GPS apresenta uma antena,
circuitos eletrônicos e um mostrador. Ele também costuma apresentar um teclado (para a entrada
de dados e de comandos) e pode, ainda, oferecer um canal serial para a saída de dados destinados
a outro equipamento eletrônico.
26
3.3. Serviços
O GPS disponibiliza dois tipos de serviços, conhecidos por: SPS (Standard Positioning
Service – Serviço de Posicionamento Padrão) e PPS (Precise Positioning Service – Serviço de
Posicionamento Preciso). O SPS é um serviço de posicionamento e tempo padrão, que está
disponível a todos os usuários do globo, sem cobrança de qualquer taxa. O PPS proporciona
melhores resultados, mas é restrito a uso militar e a usuários autorizados.
Na verdade, o sistema sempre teve capacidade de propiciar bons níveis de acurácia, mas
ao que tudo indica isso não era de interesse do Departamento de Defesa Americano (DoD). O
Sistema que foi originalmente projetado para uso militar, foi liberado para uso geral, em 1980,
por decisão do então presidente Ronald Reagan. Na época, o DoD americano implantou um erro
proposital no Sistema, com a finalidade de resguardar a segurança interna do país, uma vez que o
GPS poderia ser utilizado, para fins militares, por nações inimigas. Dessa forma, a limitação da
acurácia era imposta pela adoção dos recursos AS (Anti-spoofing) e SA (Selective Availability –
Disponibilidade Seletiva). O AS é um processo de criptografia de um dos códigos utilizados no
GPS para realizar medidas de distâncias (denominado código P), visando proteger seu uso por
usuários não autorizados. Pela SA ocorre manipulação das mensagens de navegação e da
freqüência dos relógios dos satélites, implicando em erros de posicionamento da ordem de 100 a
140 m. Para grande surpresa e em benefício da comunidade de usuários, o processo de
deterioração da acuracidade foi abolido a 0 h (zero hora, tempo universal), do dia 2 de maio de
2000, melhorando a acurácia de posicionamento em aproximadamente 10 vezes
27
3.4. Operadores de Sinais
Existem alguns sistemas de radio navegação por satélite: o SLR (Satellite Laser Range),
o DORIS (Doppler Orbitography and Radiolocation Integrates by Satellite), esses dois
destinados a aplicações científicas por meio do uso de equipamentos de custos elevados; o
NAVSTAR GPS (NAVigation System with Time And Ranging - Global Positioning System), o
GLONASS (Global Navigation Satellite System) e o Galileo que estão sendo orientados para
aplicações mais populares.
3.4.1. NAVSTAR GPS
O NAVSTAR GPS (NAVigation System with Time And Ranging - Global Positioning
System) é um sistema de rádio navegação por satélite que fornece, a usuários que possuam
equipamentos apropriados, coordenadas precisas de posicionamento tridimensional e informação
sobre a navegação e o tempo. Traduzido para o Português, o Sistema de Posicionamento Global
também é conhecido como Sistema de Posicionamento por Satélite. Esse sistema foi detalhado
no item 3.2.
3.4.2. GLONASS
Similar ao GPS, o GLONASS proporciona posicionamento 3-D e velocidade, bem como
informações de tempo, sob quaisquer condições climáticas, em âmbito local, regional e global.
Esse sistema foi concebido no início dos anos 70 e no momento encontra-se sob a
28
responsabilidade da Russian Federation Space Forces (Federação Russa das Forças Espaciais).
Da mesma forma que o GPS, ele é composto pelos segmentos: espacial, de controle e dos
usuários.
O segmento de controle é composto de: um sistema de controle central que planeja todas
as funções do sistema; um sincronizador central que dissemina o sistema de tempo; um sistema
de controle de freqüência; 3 estações de comando e de rastreio; e 1 unidade de campo para
controle da navegação dos satélites.
O segmento espacial é composto de uma constelação de vinte e quatro satélites ativos e
um de reserva. Eles são distribuídos em três planos orbitais separados de 120º e com inclinação
de 64,8º. Órbitas aproximadamente circulares, com altitude da ordem de 19.100 km e período
orbital de 11 horas e 15 minutos. Devido a seu maior ângulo de inclinação, esse sistema propicia
uma melhor cobertura, em relação ao GPS, para as altas altitudes. Transmite os sinais também
em duas bandas, denominadas L1 e L2. O processo de transmissão utiliza uma freqüência para
cada satélite que no geral é mais complexo, e, em alguns casos de posicionamento, menos
preciso que o do GPS. A precisão instantânea para os componentes de posicionamento horizontal
é da ordem de 60 a 75 m.
O sistema não tem recebido a manutenção esperada. Declarado operacional em janeiro de
1996, com vinte e quatro satélites em operação, o GLONASS conta atualmente com uma
quantidade bem menor de satélites em atividade, embora tenha sido noticiado um plano de
recuperação gradual, com previsão de recuperação total da constelação em 2003.
Existem no mercado aparelhos que recebem e processam simultaneamente, os sinais do
GPS e do GLONASS. Isso pode, eventualmente, melhorar a capacidade de precisão do
posicionamento. A figura 3.4 apresenta o aspecto físico do satélite da constelação GLONASS.
29
Figura 3.4 – Satelite da Constelação GLONASS
3.4.3. Galileo
O fato do governo americano não autorizar que outras nações participem do controle,
mesmo parcial, do GPS, levou a União Européia a desenvolver uma solução própria, com uma
nova constelação de satélites para navegação.
Em 1999, com base em intensa pesquisa realizada pelo Forum Europeu do GNSS (Global
Navigation Satellite System) nos anos de 1998 e 1999, o Ministério dos Transportes europeu
aprovou a fase de definição do Galileo. Será um sistema aberto e global, com controle civil,
completamente compatível com o GPS e com o GLONASS, mas com operação totalmente
independente. Com financiamento preliminar garantido pela ESA (European Space Agency –
Agência Espacial Européia) e pela TEN (Trans-European Networks - Rede de Transporte
Européia), o Projeto está aberto à participação de outras entidades, públicas e privadas, inclusive
cooperação internacional de outras nações, tais como Rússia, Canadá e Japão.
O Galileo está planejado para ser composto pelos segmentos de controle, espacial, e de
serviços e performance.
30
Ao todo, doze estações darão suporte ao segmento de controle para determinação de
órbitas e sincronização do tempo. Além disso, esse segmento será conectado por uma rede de
comunicação, a duas cadeias independentes, com operação quase autônoma, visando garantir
controle da integridade interna e operações de alta qualidade.
Quanto ao segmento espacial, duas opções estão sendo discutidas:
- 21 satélites de órbita média, distribuídos em 3 planos orbitais com inclinação de 65º e
altura de 19.100 km,complementados com 3 satélites geoestacionários adicionais cujo custo está
estimado em aproximadamente US$ 2,3 bilhões;
- 30 satélites de órbita média, distribuídos em 4 planos orbitais com inclinação de 65º e
altura de 19.100 km, complementados com 9 satélites geoestacionários adicionais, com um custo
estimado em aproximadamente US$ 2,9 bilhões, sendo esta a opção preferida.
A estrutura do sinal do Galileo será baseada em até 4 portadoras da banda L.
Dependendo de acordos internacionais, duas freqüências poderão ser idênticas as do GLONASS
e outras duas iguais as do GPS.
Quanto ao segmento de serviços e performance, três opções poderão ser disponibilizadas:
- OAS (Open Access Service – Serviço de Acesso Aberto), que será o serviço básico
oferecido ao público, sem custos diretos, desde que o SPS (Standard Positioning Service) do
GPS, também o seja.
- CAS1 (Controlled Acces Service 1 – Serviço 1 de Acesso Controlado), para usuários
que exigem um serviço garantido e com contrato de responsabilidade. Sobre esse serviço será
cobrada uma taxa dos usuários que vierem a utilizá-lo.
- CAS2 (Controlled Acces Service 2 – Serviço 2 de Acesso Controlado), para uso militar
e aplicações críticas de segurança.

31
Quanto à performance, o Galileo deverá proporcionar pelo menos o mesmo desempenho
a ser alcançado com a modernização do GPS. Para usuários autônomos, realizando
posicionamento por ponto em tempo real utilizando apenas observáveis resultantes do código
(pseudo-distâncias), está prevista acurácia horizontal de 4,0 m, vertical de 7,00 m e de tempo de
30 ns.
Sob a responsabilidade da Agência Espacial Européia, o Sistema está programado para
entrar em completa operação em 2008. O primeiro satélite foi lançado em dezembro de 2005,
mas no primeiro semestre de 2006 estará parcialmente operacional. A figura 3.5 apresenta o
aspecto físico do satélite da constelação Galileo.
Figura 3.5 – Satélite da Constelação Galileo.
32
3.5. Operação
3.5.1. O Posicionamento
Posicionamento consiste na determinação da posição de objetos em relação a um
referencial específico. Embora o GPS empregue alguns dos equipamentos tecnologicamente
mais sofisticados já construídos e complexos programas de controle, o princípio básico do
posicionamento por satélite é relativamente simples.
Os cálculos de posicionamento do receptor GPS são baseados nas distâncias entre o
receptor e os satélites e ainda da posição de cada satélite no espaço cartesiano. Isso significa que
determinamos nossa posição na Terra medindo a distância até um grupo de satélites localizado
no espaço. Os satélites atuam, na realidade, como pontos de referência precisos para nós.
O princípio básico do posicionamento usado pelo GPS é conhecido como trilateração
eletrônica e seu princípio diz o seguinte: se determinarmos as distâncias de um ponto de posição
desconhecida em relação a três outros pontos de posições conhecidas, então podemos
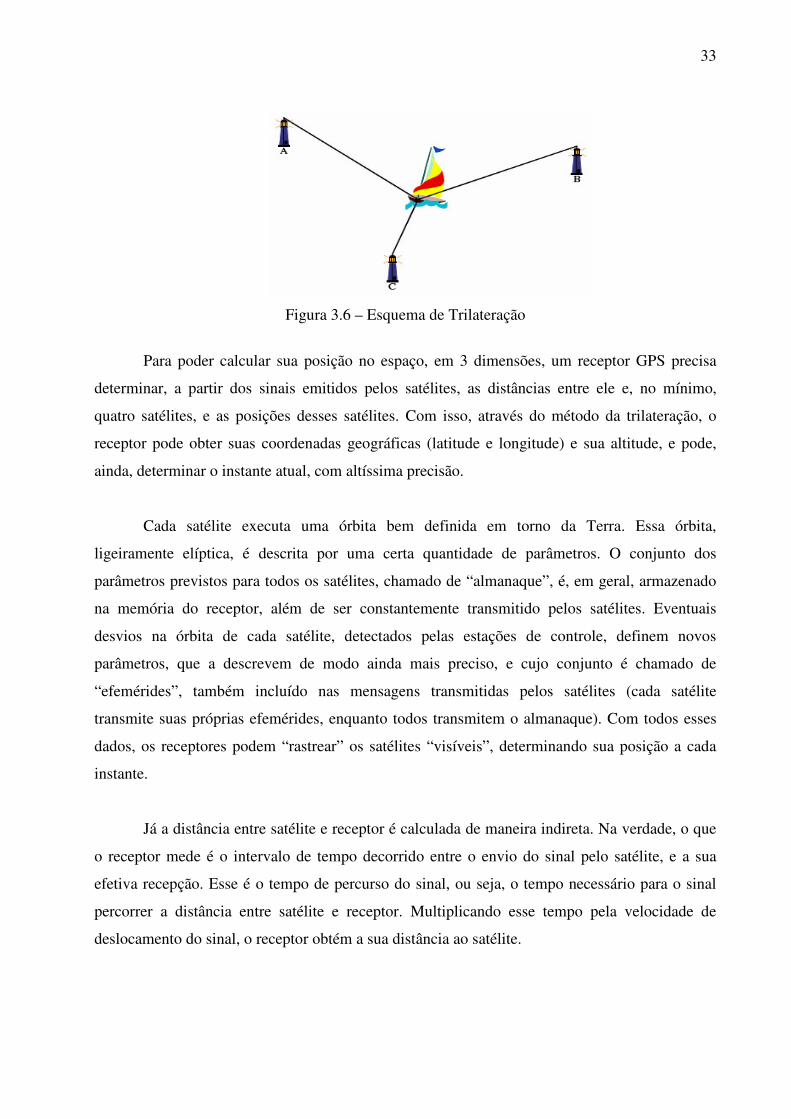
determinar a posição do ponto desconhecido. Para ilustrar este princípio, suponha que se queira
localizar um objeto como o representado na figura 3.6, e para tanto, existem 3 radiofaróis
instalados em uma região costeira em posições conhecidas (latitude, longitude e altitude) e que o
barco receba mensagem dos radiofaróis informando suas posições. Se algum equipamento no
barco conseguir calcular a distância do mesmo em relação aos 3 radiofaróis, então, usando essas
distâncias juntamente com as coordenadas desses radiofaróis, é possível calcular as coordenadas
do barco.
33
Figura 3.6 – Esquema de Trilateração
Para poder calcular sua posição no espaço, em 3 dimensões, um receptor GPS precisa
determinar, a partir dos sinais emitidos pelos satélites, as distâncias entre ele e, no mínimo,
quatro satélites, e as posições desses satélites. Com isso, através do método da trilateração, o
receptor pode obter suas coordenadas geográficas (latitude e longitude) e sua altitude, e pode,
ainda, determinar o instante atual, com altíssima precisão.
Cada satélite executa uma órbita bem definida em torno da Terra. Essa órbita,
ligeiramente elíptica, é descrita por uma certa quantidade de parâmetros. O conjunto dos
parâmetros previstos para todos os satélites, chamado de “almanaque”, é, em geral, armazenado
na memória do receptor, além de ser constantemente transmitido pelos satélites. Eventuais
desvios na órbita de cada satélite, detectados pelas estações de controle, definem novos
parâmetros, que a descrevem de modo ainda mais preciso, e cujo conjunto é chamado de
“efemérides”, também incluído nas mensagens transmitidas pelos satélites (cada satélite
transmite suas próprias efemérides, enquanto todos transmitem o almanaque). Com todos esses
dados, os receptores podem “rastrear” os satélites “visíveis”, determinando sua posição a cada
instante.
Já a distância entre satélite e receptor é calculada de maneira indireta. Na verdade, o que
o receptor mede é o intervalo de tempo decorrido entre o envio do sinal pelo satélite, e a sua
efetiva recepção. Esse é o tempo de percurso do sinal, ou seja, o tempo necessário para o sinal
percorrer a distância entre satélite e receptor. Multiplicando esse tempo pela velocidade de
deslocamento do sinal, o receptor obtém a sua distância ao satélite.
34
Ocorre que a medição do tempo de percurso do sinal é afetada pela baixa precisão do
relógio interno do receptor. Com isso, a distância do receptor a cada satélite apresenta um erro
considerável, sendo, então, chamada de “pseudo-distância” (ou “pseudo-range”). Porém, ao se
tomarem as distâncias a pelo menos 4 satélites diferentes, num mesmo instante, os efeitos da
imprecisão do relógio se anulam. É por isso que um receptor precisa captar sinais enviados por,
no mínimo, 4 satélites.
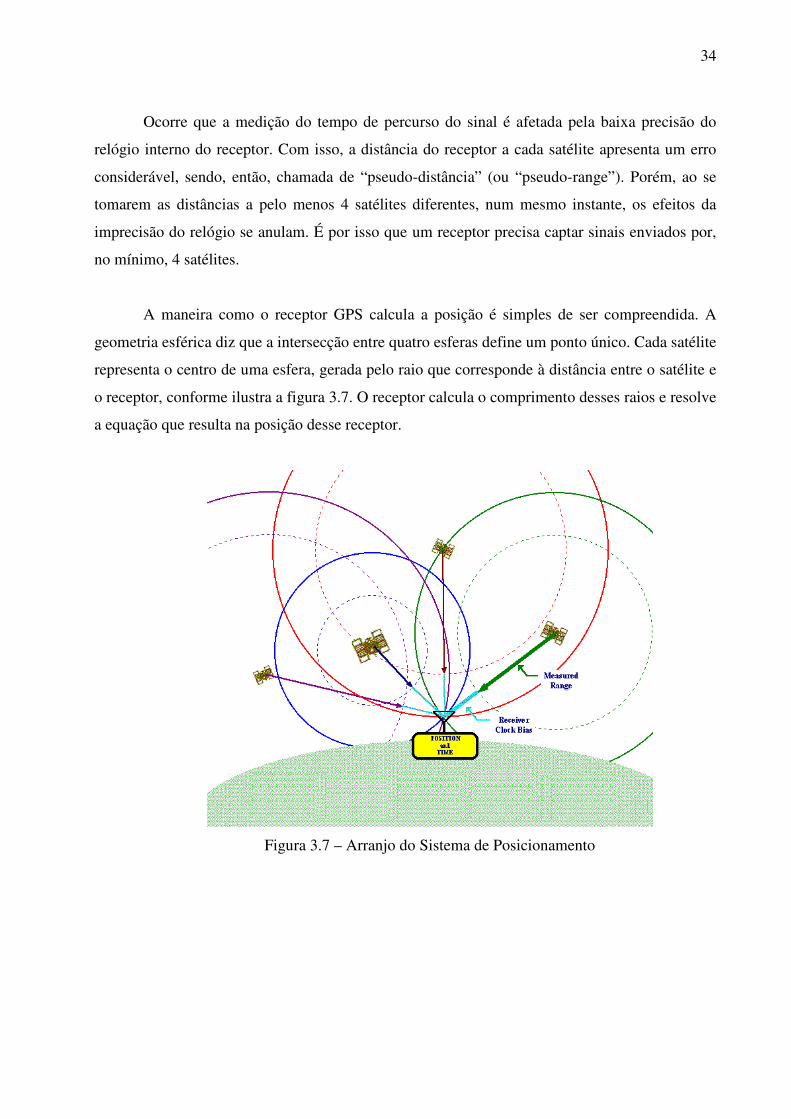
A maneira como o receptor GPS calcula a posição é simples de ser compreendida. A
geometria esférica diz que a intersecção entre quatro esferas define um ponto único. Cada satélite
representa o centro de uma esfera, gerada pelo raio que corresponde à distância entre o satélite e
o receptor, conforme ilustra a figura 3.7. O receptor calcula o comprimento desses raios e resolve
a equação que resulta na posição desse receptor.
Figura 3.7 – Arranjo do Sistema de Posicionamento
35
3.5.2. Tempo Preciso
A alta precisão na realização das medidas de tempo é crucial para o sistema GPS. Um
erro de frações de segundo pode representar uma posição a quilômetros do local desejado. Para
que essas medidas sejam realizadas os satélites têm relógios atômicos sintonizados com o relógio
da Estação de Controle Central. A medida do tempo dos relógios dos satélites é determinada
pelos pulsos atômicos dos cristais radioativos Césio ou Rubídio, garantindo precisão da ordem
de 10-12 segundos. Cada satélite possui quatro relógios para assegurar que pelo menos um relógio
estará sempre trabalhando de forma precisa.
O sincronismo entre os relógios dos satélites é resolvido com tais relógios de altíssima
precisão. Se tivéssemos que instalar um relógio atômico nos receptores GPS o preço seria
proibitivo para o uso comum. A solução encontrada é obtida com um relógio menos preciso nos
receptores. Esses relógios têm erros relativamente grandes, da ordem de 10-9 segundos. Tais
erros são quase que totalmente eliminados através de uma medição extra para um quarto satélite,
adicionalmente aos 3 mínimos necessários, que permite o ajuste a um sincronismo quase
perfeito.
O período de órbita do sistema GPS coloca os satélites a uma distância aproximada de
20.000 km de altitude e as velocidades relativísticas do clock dos veículos espaciais (SV) perdem
aproximadamente 7.2�s por dia com relação à Terra. Por outro lado a altitude dos veículos
espaciais os faz ganhar 45.6�s por dia. O ganho total é de 38.4 �s diários, valor considerado
elevado para o esse tipo de sistema. Por isso os clocks dos veículos espaciais são construídos
para perderem 38.4 �s por dia.
A precisão de um clock pode ser entendida como o grau de desvio de sua referência. A
base de tempo do GPS (freqüentemente chamada de clock composto) é formada pela ponderação
de todas as leituras dos clocks de GPS atuais. Os erros de leitura de tempo encontrados no GPS
podem ser ocasionados por erros sistemáticos, perturbações ambientais (explosões de estrelas,
chuva cósmica) e variações aleatórias.
36
3.5.3. Mensagens de GPS
Em órbita os satélites recebem os sinais da Estação Mestra de Controle e enviam os
sinais de GPS através de ondas de rádio que se propagam na velocidade da luz. Existem alguns
padrões de identificação dos satélites GPS, mas o mais utilizado é conhecido como PRN (Pseudo
Random-Noise – em português pode ser traduzido como ruído falsamente aleatório) ou SVID
(Space Vehicle Identification – identificação do veículo espacial). Esse é o número que aparece
no visor da maioria dos aparelhos receptores GPS, para identificar os satélites que estão sendo
rastreados.
Os sinais transmitidos pelos satélites, também denominados de observáveis, têm estrutura
complexa em razão da necessidade de segurança, mantendo as transmissões livres de
interferência ou acesso indevido, fundamentais em se tratando de um sistema de uso militar.
Cada satélite transmite duas portadoras, (ondas senoidais), denominadas L1 e L2. São
geradas a partir da freqüência fundamental de 10.23 MHz que multiplicadas por 154 e 120,
respectivamente, dão origem às seguintes freqüências e comprimentos de onda:
L1 = 1575.42 MHz e comprimento de onda = 19 cm
L2 = 1227.60 MHz e comprimento de onda = 24 cm
Os sinais GPS devem ser entendidos como um conjunto de informações, transportado
pelas ondas portadoras. Esse conjunto de informações pode ser identificado e captado pelos
receptores GPS que estejam situados em local onde não haja obstáculo em linha direta com o
satélite.
37
Os códigos que formam o PRN são modulados, em fase, sobre essas duas portadoras.
Essa técnica permite realizar medidas de distâncias a partir da medida do tempo de propagação
da onda, do satélite ao receptor. Um PRN é uma seqüência binária de +1 e –1, ou 0 e 1, que
parece ter característica aleatória, mas por ser gerado através de um algoritmo, pode ser
univocamente identificado. Os códigos do PRN são basicamente os códigos C/A (Coarse
Aquisition – fácil aquisição) e o código P (Precise ou Protected – preciso ou protegido).
O código C/A faz parte de uma família de códigos, que tem como característica básica a
baixa correlação entre seus membros, (cada satélite tem seu código). Isso possibilita a rápida
distinção dos sinais recebidos simultaneamente de vários satélites, pelos receptores. Esse código
é modulado somente sobre a onda portadora L1. É a partir do C/A que os usuários civis obtêm as
medidas de distâncias que permitem o posicionamento com a acuracidade estipulada no SPS
(Standard Positioning Service). Ele não é criptografado, embora possa ter eventualmente sua
precisão novamente degradada, como acontecia até maio de 2000.
O código P tem sido reservado para uso dos militares americanos e dos usuários
autorizados e possibilita posicionamentos mais precisos que aqueles realizados por meio do
código C/A. O código P é modulado nas portadoras L1 e L2, sendo único para cada satélite,
podendo assim ser identificado, embora todos os satélites transmitam na mesma freqüência. Esse
código é criptografado quando o sistema está operando no modo AS (Anti-spoofing - anti-
fraude), passando a ser denominado código Y, não disponível para usuários civis. Trata-se de
uma versão segura do código P. O propósito principal é evitar que inimigos consigam fraudá-lo,
mediante a geração de uma réplica do mesmo. Somente usuário autorizado tem acesso às
informações dessa estrutura de código.
Além dos códigos C/A e P as portadoras levam aos receptores, a mensagem de
navegação (efemérides). Essa mensagem tem essencialmente a função de informar, ao receptor, a
posição do satélite a cada instante. Cada satélite transmite sua própria mensagem de navegação,
previamente processada pelo Segmento de Controle Terrestre e injetada várias vezes ao dia em
cada satélite.
38
Uma vez conhecidas as posições dos satélites, torna-se possível determinar as
coordenadas do local onde se encontra o usuário, desde que sejam conhecidas também, a
distância do receptor em relação a cada um dos satélites, em um dado instante. Além dos
parâmetros orbitais, integram também a mensagem de navegação: os elementos essenciais a
correções devidas às interferências meteorológicas, coeficientes de ajuste do relógio do satélite,
da medição de tempo GPS. Esses dados que se encontram no conjunto de informações
denominado almanaque é que propiciam ao receptor calcular as posições aproximadas dos
satélites, mesmo daqueles que não estejam sendo rastreados.
3.5.4. Tempo e Posição
O receptor de GPS começa a localizar os satélites e recebe os códigos PRN de cada um,
enquanto o processador de dados do receptor estima os valores de Tempo de Chegada (TOA –
Time Of Arrival: que é o modo de declaração do tempo percorrido por uma onda
eletromagnética de um ponto a outro). Dessa forma, o processador multiplica individualmente os
valores de TOA pela velocidade da luz e compensa os erros determinísticos de tempo, distorções
atmosféricas entre os satélites e o receptor, além de efeitos provenientes do ruído interno gerado
pelo receptor.
O processador de dados do receptor obtém a informação necessária para realizar essas
compensações da mensagem de dados de navegação (NAV-msg). O NAV-msg é sobreposto nos
códigos P e C/A a uma taxa de dados de 50 bits/s e contém 25 frames de informação. Cada frame
de informação consiste em 1500 bits divididos em subframes de 300 bits cada. Um receptor de
GPS requer 30 segundos para receber os dados de um frame e 12,5 minutos para receber todos os
25 dados de frames disponíveis.
39
3.5.5. Aquisição de Sinais
O receptor de GPS detecta o espectro de irradiação da constelação de satélite que possui
seus níveis de radiação menores que o ruído eletromagnético natural da Terra. Depois de iniciada
a detecção o sinal é amplificado por uso do processo seletivo e o código C/A é utilizado para
identificar a freqüência portadora do sinal original.
As potências mínimas de sinais exigidas pelos receptores de GPS são:
• Freqüência L1 C/A – code: -160 dBW
• Freqüência L1 P – code: -163 dBW
• Freqüência L2 P – code: -166 dBW
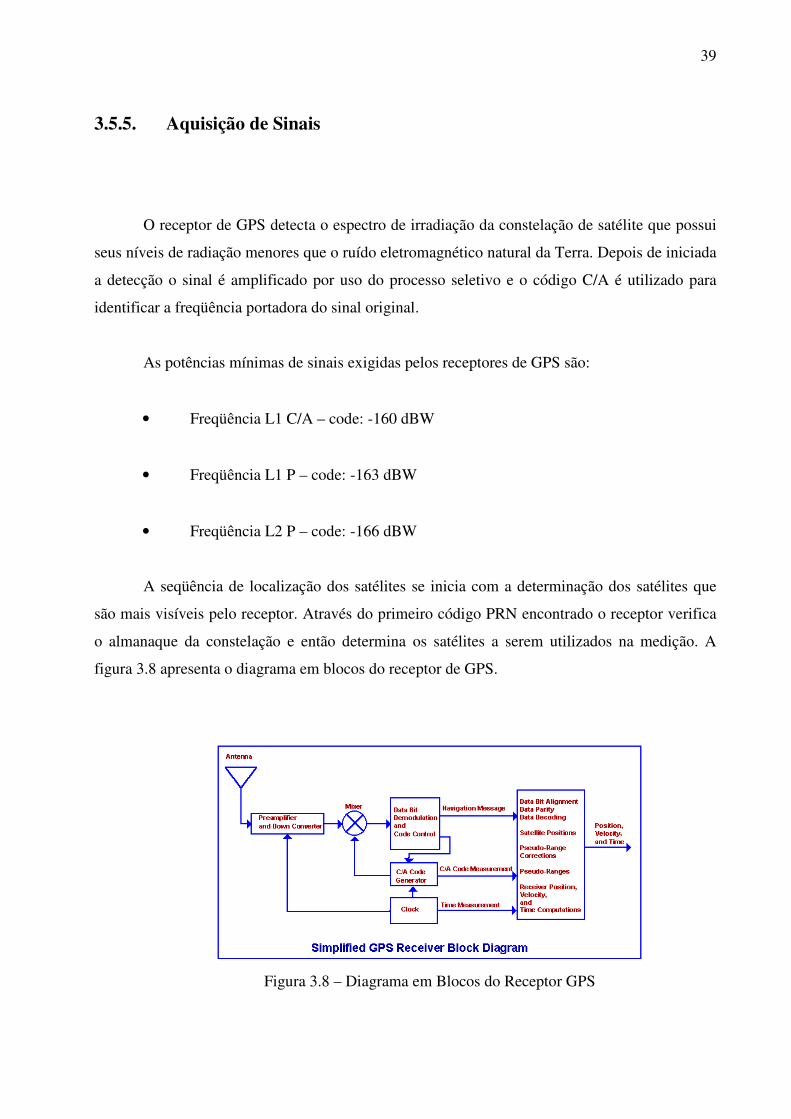
A seqüência de localização dos satélites se inicia com a determinação dos satélites que
são mais visíveis pelo receptor. Através do primeiro código PRN encontrado o receptor verifica
o almanaque da constelação e então determina os satélites a serem utilizados na medição. A
figura 3.8 apresenta o diagrama em blocos do receptor de GPS.
Figura 3.8 – Diagrama em Blocos do Receptor GPS
40
3.5.6. Fontes de Imprecisão
A precisão na determinação da posição de um receptor depende da precisão das posições
dos satélites e das suas distâncias.
O erro na determinação da posição de um satélite pode ocorrer em função de um eventual
desvio de órbita e do atraso com que esse desvio é detectado pelas estações de controle e
registrado nas efemérides dos satélites. Esse erro, porém, é, em geral, bem pequeno (tipicamente,
pode provocar imprecisão de 2,5m na determinação da posição do receptor).
Já a medição da distância entre satélite e receptor pode ser afetada por uma série de
fatores. Mesmo que os desvios no relógio do receptor sejam filtrados por redundância, com
sinais enviados por um quarto satélite, eventuais desvios nos relógios dos satélites não podem ser
detectados pelo receptor. Também, aqui, o erro na posição do receptor é pequeno (tipicamente,
de 1,5m), pois os relógios dos satélites são altamente precisos, e também monitorados pelas
estações de controle.
Outro fator que influi na precisão das medidas é a variação da velocidade dos sinais
eletromagnéticos emitidos pelos satélites, quando atravessam a atmosfera terrestre. A velocidade
dos sinais, constante apenas no vácuo, é afetada por partículas ionizadas (existentes na ionosfera)
e pelo vapor d’água (existente na troposfera). É possível se fazer um modelamento da atmosfera
que procura avaliar os desvios da velocidade dos sinais dos satélites, mas esse modelamento
nunca é perfeito, pois as condições atmosféricas se alteram de modo imprevisível. Também,
aqui, os efeitos no cálculo da posição do receptor não são muito elevados (tipicamente, de 5,5m).
Há, ainda, pequenos efeitos (da ordem de 0,6m) causados pelo fenômeno do
multipercurso, isto é, das múltiplas reflexões que o sinal de um satélite pode sofrer, em
obstáculos próximos à antena do receptor.

41
Todos esses fatores, e, ainda, eventuais imprecisões do receptor GPS, somados,
conduzem a um erro típico, na determinação da posição do receptor, da ordem de dezenas de
metros. Não esquecendo, porém, que até alguns anos atrás, havia um fator, responsável pela
elevação do erro a cerca de 100m:, a “disponibilidade seletiva”. O Departamento de Defesa dos
Estados Unidos podia, a qualquer momento, introduzir erros propositadamente que afetavam
tanto a determinação da posição dos satélites quanto o cálculo da distância dos satélites aos
receptores. Apenas alguns receptores do exército americano e de seus aliados não eram afetados
por esses erros. Concebido inicialmente para ser utilizado em épocas de guerra, o recurso da
disponibilidade seletiva vinha sendo mantido ligado quase que ininterruptamente desde que foi
introduzido, mas, atendendo a reivindicações do segmento civil dos usuários, ele acabou sendo
desligado.
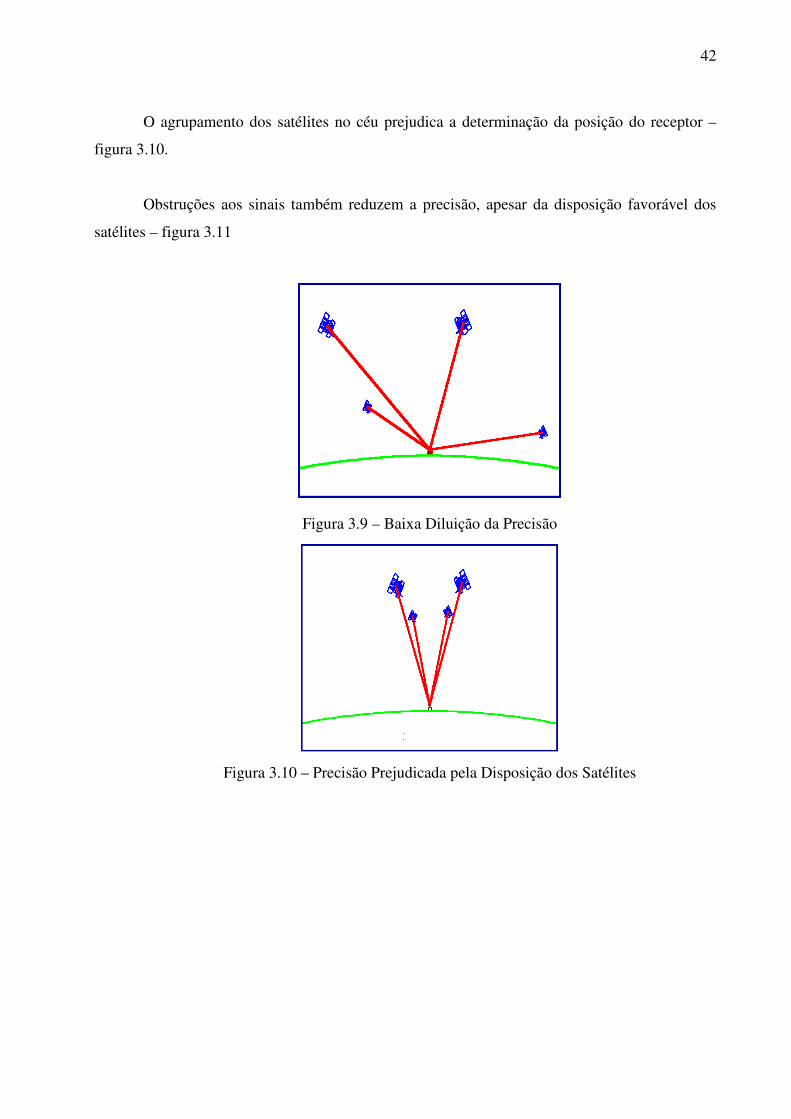
Finalmente, existem ainda fatores referentes à disposição relativa dos satélites, no
instante em que seus sinais são captados por um receptor, que definem a chamada “diluição de
precisão” (“dilution of precision”, ou DOP). Quanto mais espalhados no céu estiverem os
satélites, mais precisa é a determinação da posição do receptor. Esses fatores são denominados
de acordo com o parâmetro de posicionamento que os caracterizam:
VDOP: Relativo à altura elipsoidal.
HDOP: Relativo à latitude e longitude elipsoidal.
PDOP: Relativo ao posicionamento tridimensional.
TDOP: Relativo à medição dos intervalos de tempo
GDOP: Resulta da combinação do PDOP com o TDOP.
Uma disposição favorável dos satélites proporciona uma baixa diluição da precisão –
figura 3.9.
42
O agrupamento dos satélites no céu prejudica a determinação da posição do receptor –
figura 3.10.
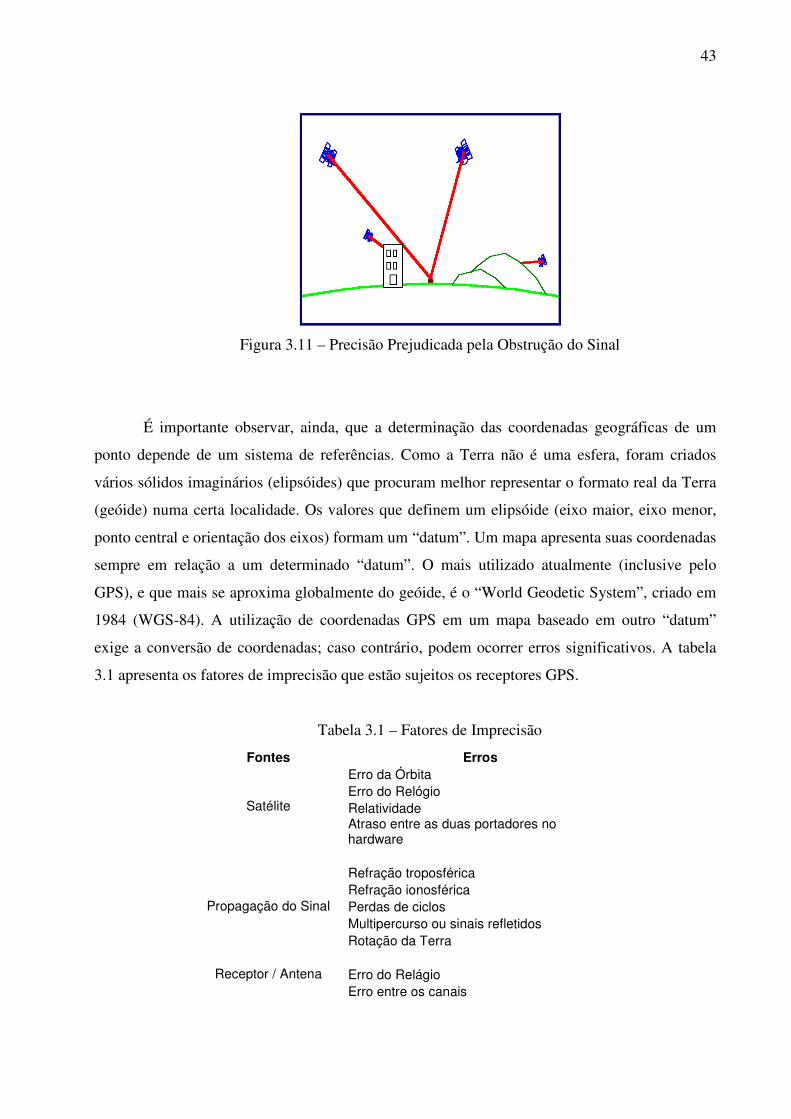
Obstruções aos sinais também reduzem a precisão, apesar da disposição favorável dos
satélites – figura 3.11
Figura 3.9 – Baixa Diluição da Precisão
Figura 3.10 – Precisão Prejudicada pela Disposição dos Satélites
43
Figura 3.11 – Precisão Prejudicada pela Obstrução do Sinal
É importante observar, ainda, que a determinação das coordenadas geográficas de um
ponto depende de um sistema de referências. Como a Terra não é uma esfera, foram criados
vários sólidos imaginários (elipsóides) que procuram melhor representar o formato real da Terra
(geóide) numa certa localidade. Os valores que definem um elipsóide (eixo maior, eixo menor,
ponto central e orientação dos eixos) formam um “datum”. Um mapa apresenta suas coordenadas
sempre em relação a um determinado “datum”. O mais utilizado atualmente (inclusive pelo
GPS), e que mais se aproxima globalmente do geóide, é o “World Geodetic System”, criado em
1984 (WGS-84). A utilização de coordenadas GPS em um mapa baseado em outro “datum”
exige a conversão de coordenadas; caso contrário, podem ocorrer erros significativos. A tabela
3.1 apresenta os fatores de imprecisão que estão sujeitos os receptores GPS.
Tabela 3.1 – Fatores de Imprecisão
Fontes Erros Erro da Órbita Erro do Relógio Relatividade Satélite Atraso entre as duas portadores no hardware
Refração troposférica Refração ionosférica Perdas de ciclos Multipercurso ou sinais refletidos
Propagação do Sinal
Rotação da Terra
Erro do Relágio Receptor / Antena Erro entre os canais
44
Centro de fase da antena
Erro nas coordenadas Multipercurso Marés terrestres Movimento do Pólo Carga dos oceanos
Estação base
Pressão atmosférica
A contribuição de uma fonte de erro particular pode ser analisada em termos de seus
efeitos na determinação da distância entre o satélite e o receptor, ou seja, na pseudo-distância. O
efeito resultante dos erros quando projetado sobre a linha que liga o usuário ao satélite, é
denominado de UERE (User Equivalent Range Error), que representa o erro equivalente da
pseudo-distância. A maioria dos aparelhos mostra em seu display o UERE de cada satélite. Um
valor típico do UERE é da ordem de 25 m.
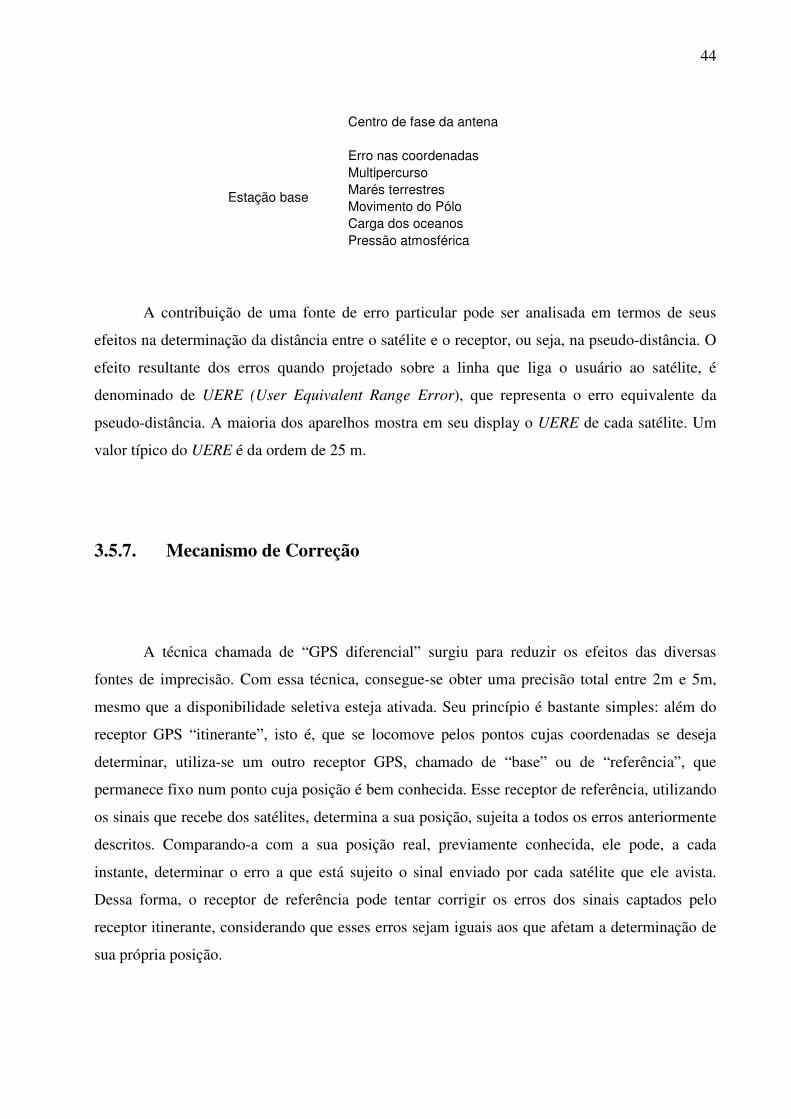
3.5.7. Mecanismo de Correção
A técnica chamada de “GPS diferencial” surgiu para reduzir os efeitos das diversas
fontes de imprecisão. Com essa técnica, consegue-se obter uma precisão total entre 2m e 5m,
mesmo que a disponibilidade seletiva esteja ativada. Seu princípio é bastante simples: além do
receptor GPS “itinerante”, isto é, que se locomove pelos pontos cujas coordenadas se deseja
determinar, utiliza-se um outro receptor GPS, chamado de “base” ou de “referência”, que
permanece fixo num ponto cuja posição é bem conhecida. Esse receptor de referência, utilizando
os sinais que recebe dos satélites, determina a sua posição, sujeita a todos os erros anteriormente
descritos. Comparando-a com a sua posição real, previamente conhecida, ele pode, a cada
instante, determinar o erro a que está sujeito o sinal enviado por cada satélite que ele avista.
Dessa forma, o receptor de referência pode tentar corrigir os erros dos sinais captados pelo
receptor itinerante, considerando que esses erros sejam iguais aos que afetam a determinação de
sua própria posição.
45
É evidente que isso não se pode garantir. As imprecisões introduzidas pelo próprio
receptor, por exemplo, são específicas para cada aparelho: o receptor de referência não pode
avaliar os erros provocados pelas características do receptor itinerante. Os efeitos do
multipercurso são, também, particulares a cada receptor, e não podem ser corrigidos.
Já os efeitos da atmosfera podem ser bastante atenuados, quanto mais próximos os
receptores itinerante e os de referência se mantiverem.
Finalmente, os erros introduzidos por desvios na órbita e no relógio interno dos satélites
podem ser totalmente eliminados pela técnica do GPS diferencial. Note-se que, nesta categoria
de erros, enquadram-se os produzidos pela ativação da disponibilidade seletiva. A figura 3.12
apresenta ao conceito de GPS diferencial.
Figura 3.12 – Conceito de GPS Diferencial

46
47
4. Receptor GPS
Para o desenvolvimento deste Projeto foi escolhido um receptor de GPS fabricado pela
Globalsat, o ET-102. Esse receptor é distribuído no Brasil pela empresa Cika Eletrônica com
sede em São Paulo – SP
4.1. Receptor Globalsat ET-102
O receptor Globalsat ET-102 possui 12 canais para a localização simultânea de até 12
satélites de GPS. O módulo recebe os sinais na freqüência L1 (1575.42 MHz) na antena
receptora.
O receptor ET-102 recebe o sinal pré-amplificado da antena, converte para freqüência
intermediária apropriada (FI) e digitaliza o sinal, entregando para o processador que identifica o
código C/A, separando a informação proveniente dos 12 satélites.
A memória é utilizada para armazenamento dos dados de efemérides dos satélites,
parâmetros de cada satélite em vista, almanaque entre outros. O módulo possui uma bateria que
evita a perda da memória em caso de reset ou desligamento, assim, quando o módulo é iniciado o
tempo de sincronismo e carregamento de dados da constelação é menor, sendo necessária apenas
sua atualização.
48
O módulo receptor pode ser alimentado com tensão entre 3.8 Volts cc até 6.5 Volts cc. O
protocolo de comunicação usado no módulo é o NMEA 0183, explicado a seguir.
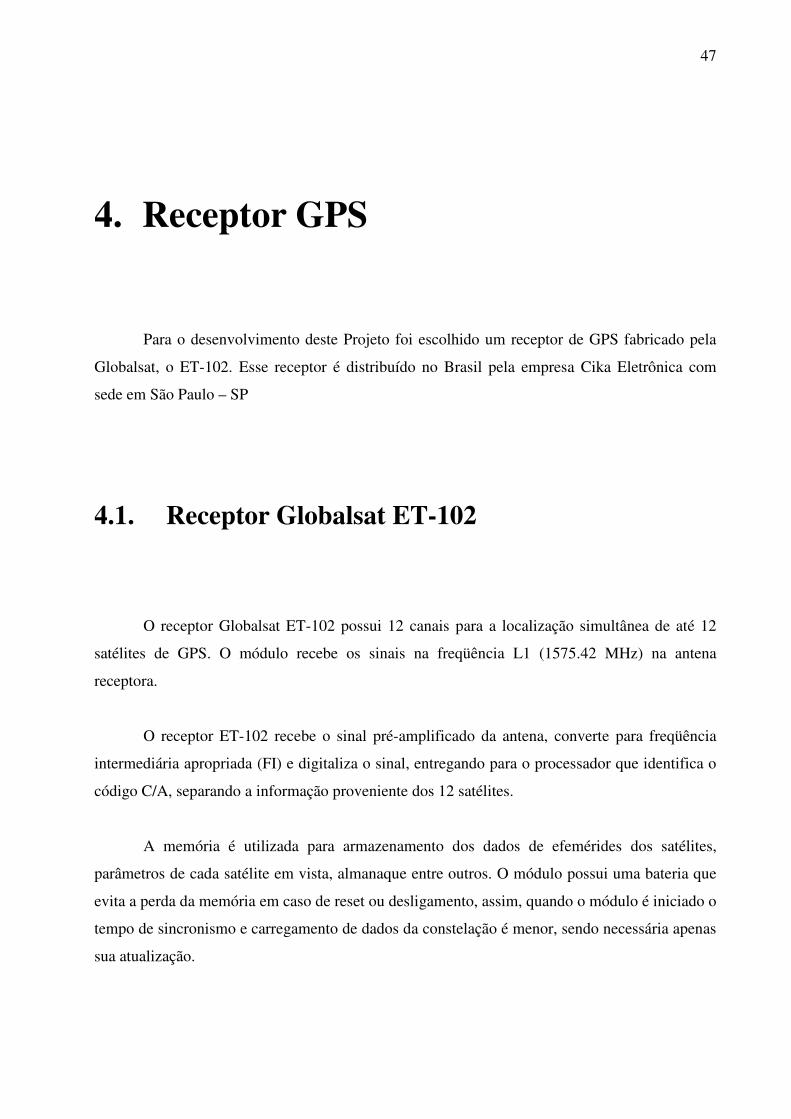
A tabela 4.1 apresenta a descrição dos pinos do receptor e as figuras 4.1, 4.2 e 4.3
apresentam aspectos físicos de do receptor GPS.
Tabela 4.1 – Descrição de Pinos
Pino Função Descrição 1 VANT Antenna DC Voltage (Input) 2 VDC 3.3~5.5 DC power input (Input) 3 VBAT Backup Battery (Input) 4 VDC (shorted with pin #2) 5 PBRES Push Button Reset Input (Active Low) (Input) 6 ---- (RESERVED)
7 SELECT Download data from RS232 to flash ROM (RESERVED)
8 ---- (RESERVED) 9 ---- (RESERVED) 10 GND Ground 11 TXA Serial Data Output A (GPS Data) 12 RXA Serial Data Input A(Commands) 13 GND Ground 14 TXB Serial Data Output B (Not Used) 15 RXB Serial Data Input B (Not Used) 16 GND Ground 17 ---- (RESERVED) 18 GND Ground 19 TIMEMARK 1PPS Time Mark Output 20 ---- (RESERVED)
Figura 4.1 – Receptor GPS Vista Frontal
49
Figura 4.2 – Receptor GPS Vista Lateral
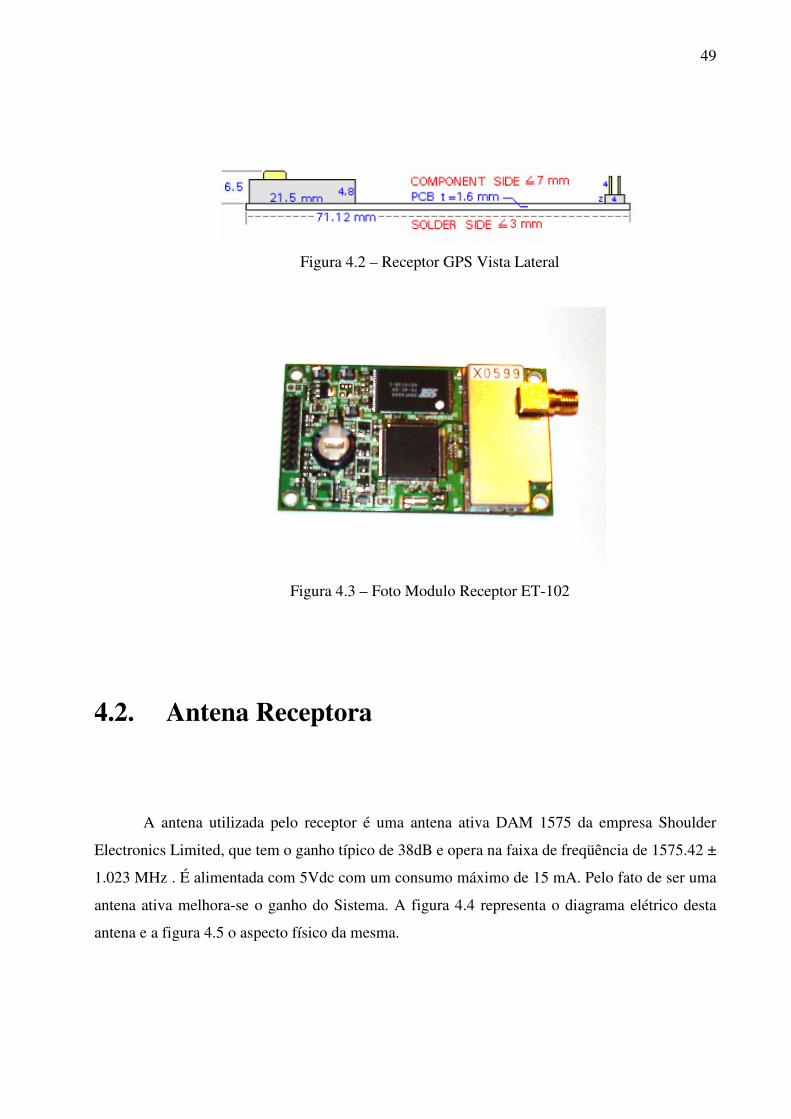
Figura 4.3 – Foto Modulo Receptor ET-102
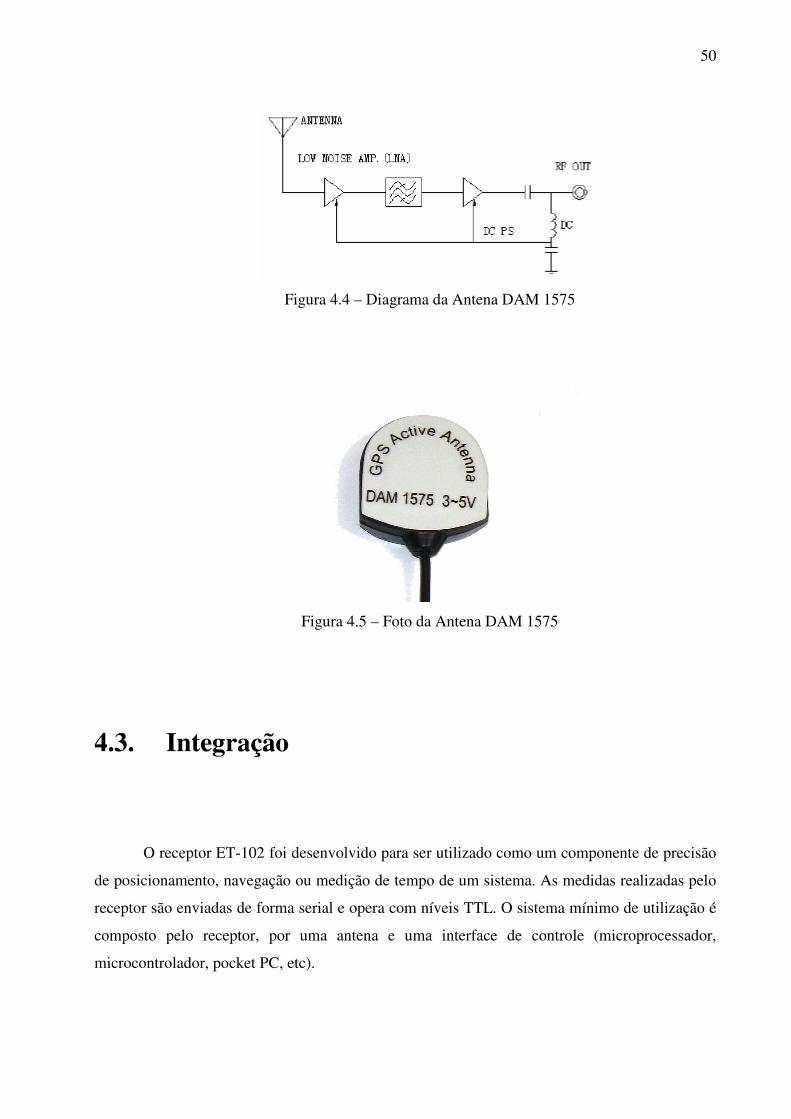
4.2. Antena Receptora
A antena utilizada pelo receptor é uma antena ativa DAM 1575 da empresa Shoulder
Electronics Limited, que tem o ganho típico de 38dB e opera na faixa de freqüência de 1575.42 ±
1.023 MHz . É alimentada com 5Vdc com um consumo máximo de 15 mA. Pelo fato de ser uma
antena ativa melhora-se o ganho do Sistema. A figura 4.4 representa o diagrama elétrico desta
antena e a figura 4.5 o aspecto físico da mesma.
50
Figura 4.4 – Diagrama da Antena DAM 1575
Figura 4.5 – Foto da Antena DAM 1575
4.3. Integração
O receptor ET-102 foi desenvolvido para ser utilizado como um componente de precisão
de posicionamento, navegação ou medição de tempo de um sistema. As medidas realizadas pelo
receptor são enviadas de forma serial e opera com níveis TTL. O sistema mínimo de utilização é
composto pelo receptor, por uma antena e uma interface de controle (microprocessador,
microcontrolador, pocket PC, etc).
51
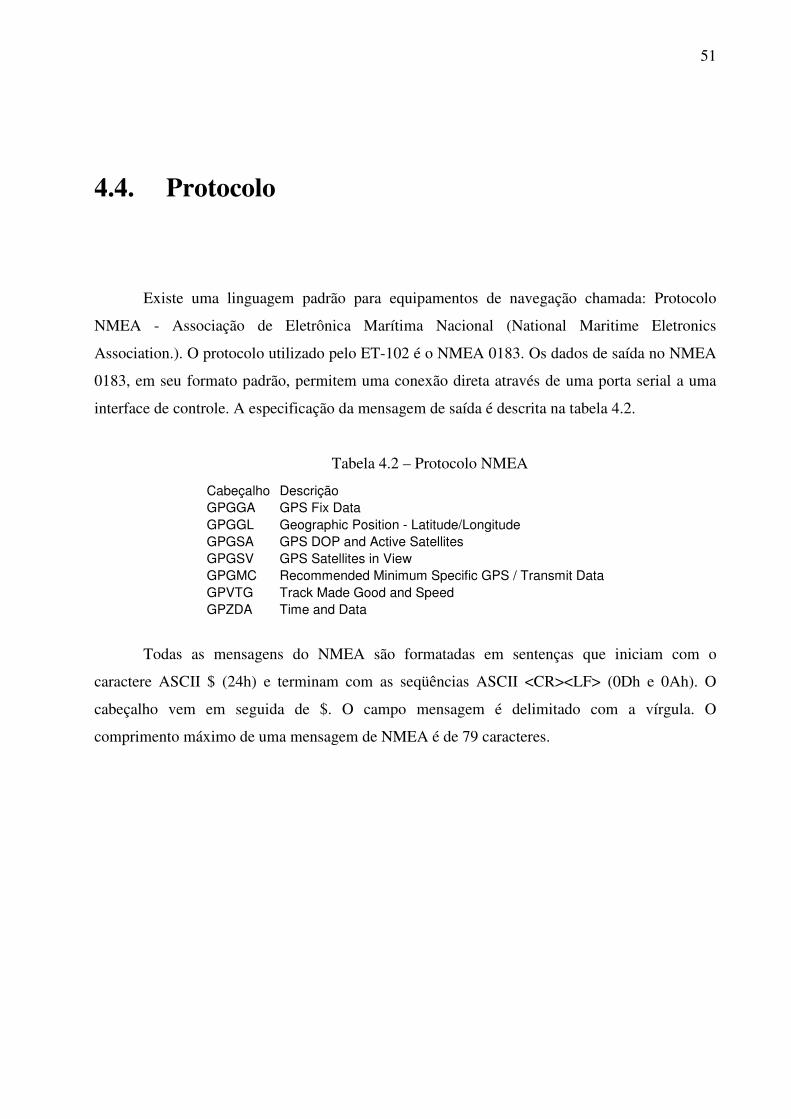
4.4. Protocolo
Existe uma linguagem padrão para equipamentos de navegação chamada: Protocolo
NMEA - Associação de Eletrônica Marítima Nacional (National Maritime Eletronics
Association.). O protocolo utilizado pelo ET-102 é o NMEA 0183. Os dados de saída no NMEA
0183, em seu formato padrão, permitem uma conexão direta através de uma porta serial a uma
interface de controle. A especificação da mensagem de saída é descrita na tabela 4.2.
Tabela 4.2 – Protocolo NMEA
Cabeçalho Descrição GPGGA GPS Fix Data GPGGL Geographic Position - Latitude/Longitude GPGSA GPS DOP and Active Satellites GPGSV GPS Satellites in View GPGMC Recommended Minimum Specific GPS / Transmit Data GPVTG Track Made Good and Speed GPZDA Time and Data
Todas as mensagens do NMEA são formatadas em sentenças que iniciam com o
caractere ASCII $ (24h) e terminam com as seqüências ASCII <CR><LF> (0Dh e 0Ah). O
cabeçalho vem em seguida de $. O campo mensagem é delimitado com a vírgula. O
comprimento máximo de uma mensagem de NMEA é de 79 caracteres.

52
5. Desenvolvimento de Hardware
O sistema é composto por um módulo celular responsável pela comunicação através do
serviço de mensagens curtas (SMS), um módulo receptor de GPS para leitura das coordenadas de
localização, placa controladora do sistema, baseada no microcontrolador MSC1211 e de um
conversor para porta serial de níveis de tensão TTL para RS232.
5.1. Placa de Controle
A placa responsável pelo gerenciamento, controle e integração do sistema de
rastreamento é baseada no microcontrolador MSC1211Y5, de fabricação da Texas Instruments.
Esse microcontrolador possui 34 pinos de entrada e saída (I/O), conversor analógico/Digital de
24 bits, conversor digital/analógico de 16 bits, memória flash de 32 Kbytes, circuito interno de
programação, PWM de 16 bits e duas UART’s (Universal Asynchronous Receiver-Transmitter).
A linguagem de programação do MSC1211 é o Assembly do 8051. Com isso o sistema poderá
ser levado da plataforma de desenvolvimento para uma plataforma final de menor custo
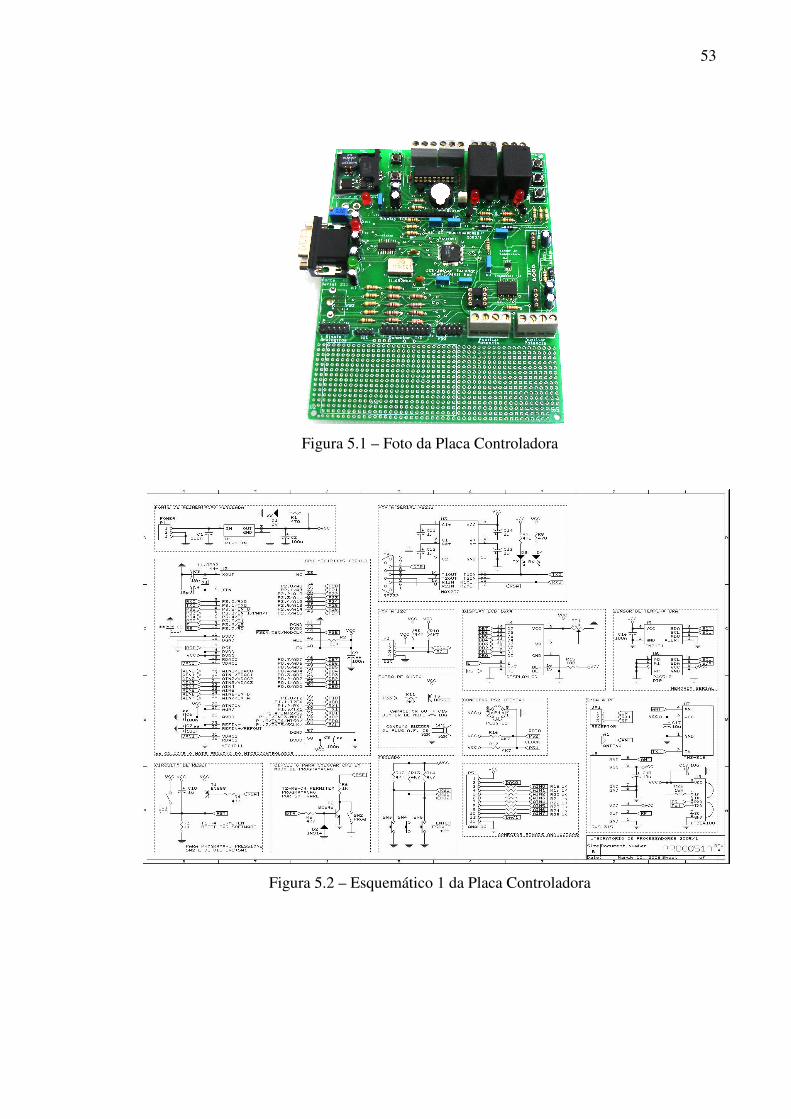
compatível com essa programação. A figura 5.1 apresenta o esquemático da placa de controle
utilizada para o desenvolvimento do Sistema. Essa placa foi projetada na disciplina de
Laboratório de Processadores. A figura 5.2 contém a foto da placa controladora e as figuras 5.3 e
5.4 o esquemático.
53
Figura 5.1 – Foto da Placa Controladora
Figura 5.2 – Esquemático 1 da Placa Controladora
54
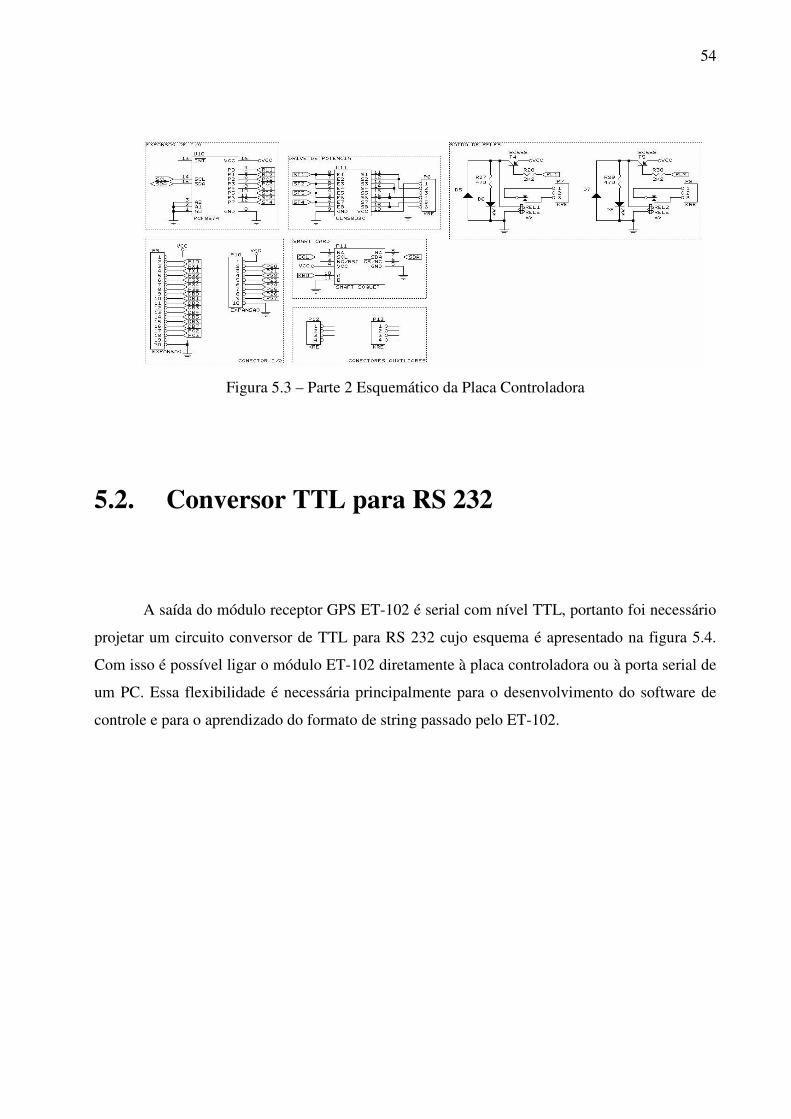
Figura 5.3 – Parte 2 Esquemático da Placa Controladora
5.2. Conversor TTL para RS 232
A saída do módulo receptor GPS ET-102 é serial com nível TTL, portanto foi necessário
projetar um circuito conversor de TTL para RS 232 cujo esquema é apresentado na figura 5.4.
Com isso é possível ligar o módulo ET-102 diretamente à placa controladora ou à porta serial de
um PC. Essa flexibilidade é necessária principalmente para o desenvolvimento do software de
controle e para o aprendizado do formato de string passado pelo ET-102.
55
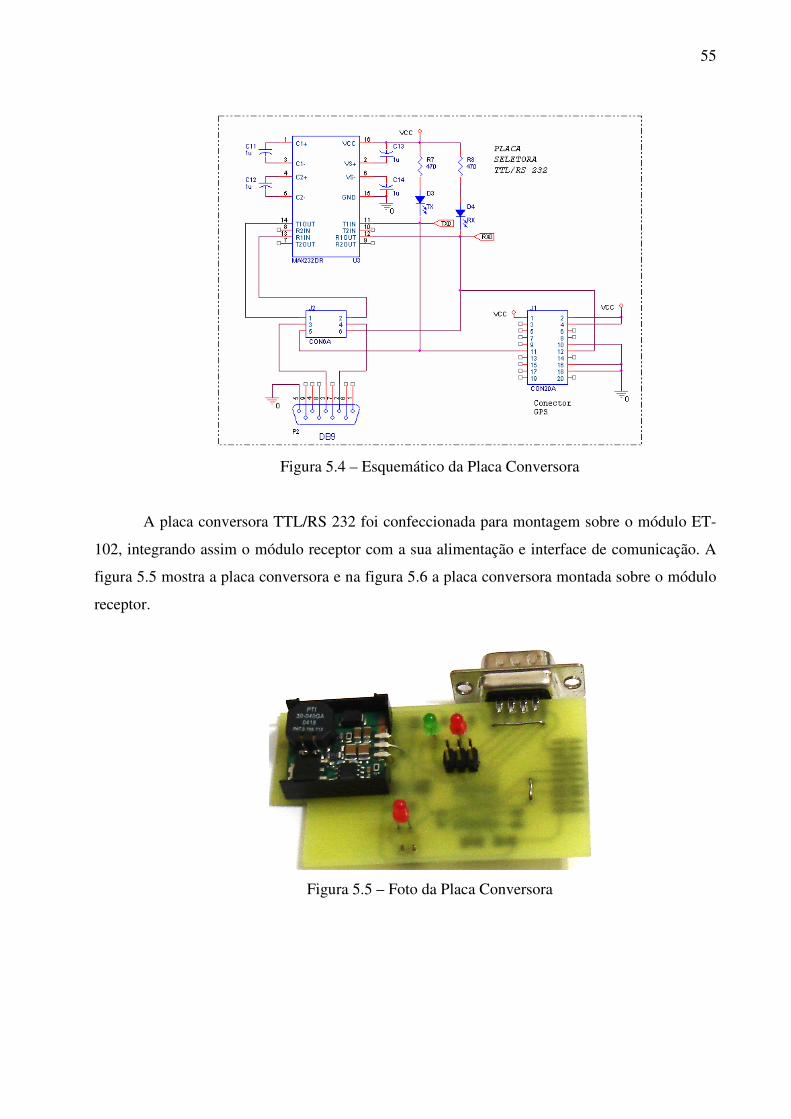
Figura 5.4 – Esquemático da Placa Conversora
A placa conversora TTL/RS 232 foi confeccionada para montagem sobre o módulo ET-
102, integrando assim o módulo receptor com a sua alimentação e interface de comunicação. A
figura 5.5 mostra a placa conversora e na figura 5.6 a placa conversora montada sobre o módulo
receptor.
Figura 5.5 – Foto da Placa Conversora
56
Figura 5.6 – Foto da Placa Conversora Montada sobre o GPS
A interface de comunicação serial RS 232 é implementada com o circuito integrado
MAX232 de fabricação da Texas Instruments. São usados apenas três pinos para a comunicação
serial (Tx, Rx e GND).
5.3. Interfaces
A placa de controle se comunica via portas seriais com o módulo celular C18 e também
com o módulo receptor GPS ET-102, portanto é necessário utilizar as duas seriais do
microcontrolador, ficando a serial 1 para o GPS, com taxa de 4800 bps, e a serial 0 para
comunicação com o módulo celular, com taxa de 19.200 bps. A serial 0 também é utilizada para
a programação do microcontrolador.
5.4. Circuito de Entrada
57
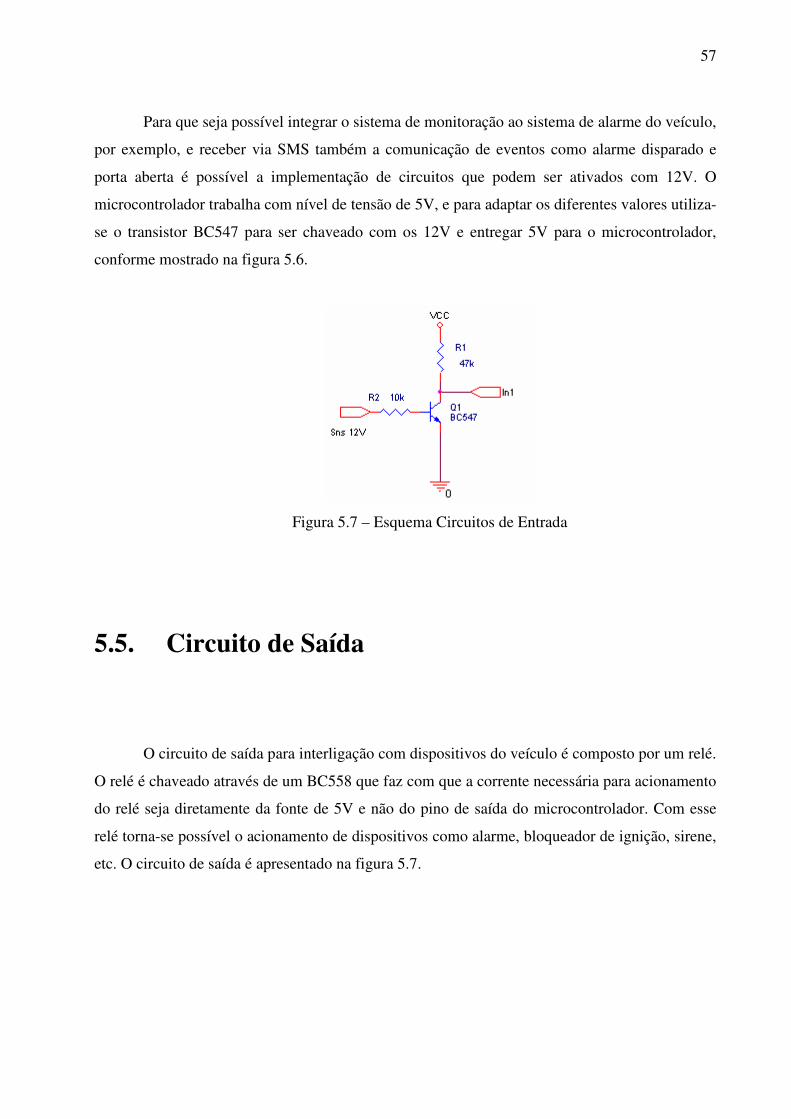
Para que seja possível integrar o sistema de monitoração ao sistema de alarme do veículo,
por exemplo, e receber via SMS também a comunicação de eventos como alarme disparado e
porta aberta é possível a implementação de circuitos que podem ser ativados com 12V. O
microcontrolador trabalha com nível de tensão de 5V, e para adaptar os diferentes valores utiliza-
se o transistor BC547 para ser chaveado com os 12V e entregar 5V para o microcontrolador,
conforme mostrado na figura 5.6.
Figura 5.7 – Esquema Circuitos de Entrada
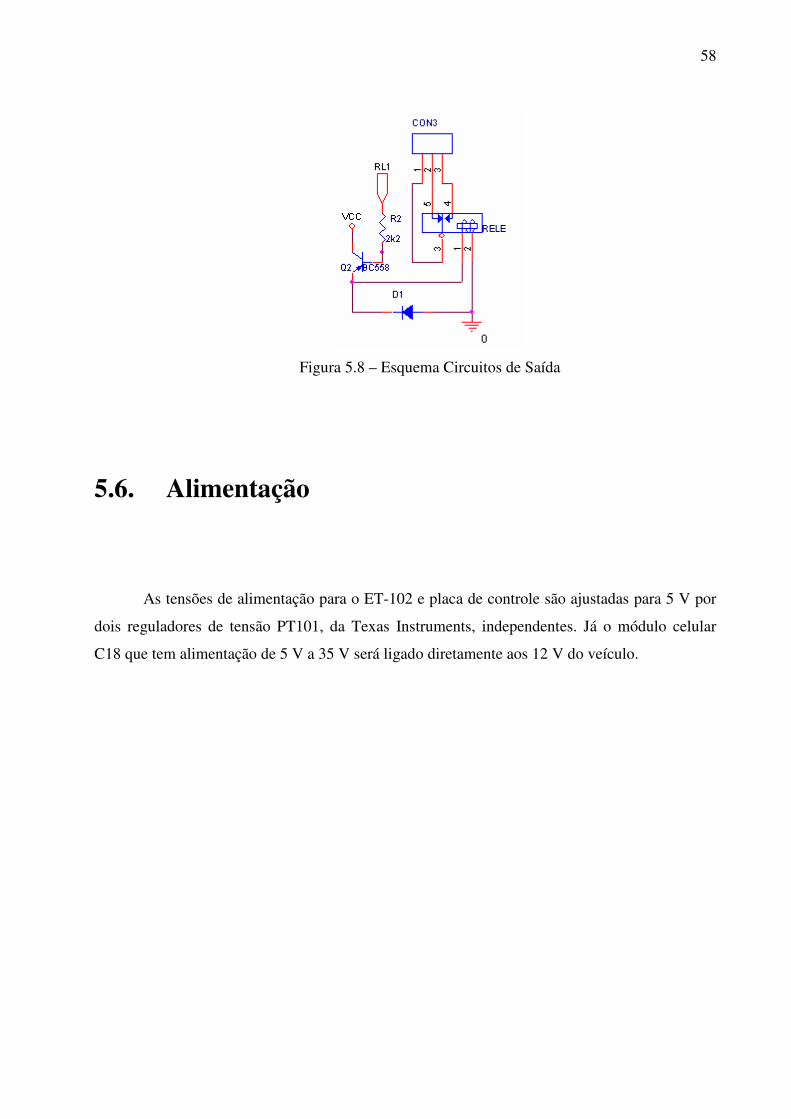
5.5. Circuito de Saída
O circuito de saída para interligação com dispositivos do veículo é composto por um relé.
O relé é chaveado através de um BC558 que faz com que a corrente necessária para acionamento
do relé seja diretamente da fonte de 5V e não do pino de saída do microcontrolador. Com esse
relé torna-se possível o acionamento de dispositivos como alarme, bloqueador de ignição, sirene,
etc. O circuito de saída é apresentado na figura 5.7.
58
Figura 5.8 – Esquema Circuitos de Saída
5.6. Alimentação
As tensões de alimentação para o ET-102 e placa de controle são ajustadas para 5 V por
dois reguladores de tensão PT101, da Texas Instruments, independentes. Já o módulo celular
C18 que tem alimentação de 5 V a 35 V será ligado diretamente aos 12 V do veículo.
59
6. Software de Controle
A linguagem de programação escolhida para desenvolvimento do software foi o
Assembly para 8051. Com isso temos a flexibilidade de migrar esse programa para qualquer
processador ou microcontrolador baseado no 8051.
O software implementa o algoritmo apresentado nos fluxogramas das figuras 6.1 e 6.2,
lembrando que a porta serial 1 é utilizada para comunicação com o módulo GPS e a porta serial
0 para comunicação com módulo celular.
Sempre que houver a inicialização do sistema, quando for alimentado ou reiniciado, o
software garante que a placa controladora só iniciará suas rotinas de inicialização após o módulo
celular ter concluído a própria inicilização, pois os primeiros comandos da placa de controle são
justamente para configurar o módulo C18 para trabalhar com o seu modo 2 que é o módulo que
responde aos comandos AT Proprietários da Motorola, bem como limpar a memória do C18 de
qualquer mensagem que possa estar gravada.
Após a inicialização, o software de controle passa a monitorar o módulo GPS e gravar a
última posição válida. A monitoração do módulo celular é feita por interrupção, ou seja, sempre
que chegar uma mensagem no celular esta será repassada para a placa de controle que atenderá
ao pedido de interrupção dando o tratamento apropriado.
São pré-configurados no software de gestão quais os dois números de celular que estão
autorizados a solicitar informações do estado do veículo e de acordo com esse parâmetro quando
uma solicitação chegar via SMS a primeira ação tomada é verificar se o solicitante está
autorizado a receber a informação pedida. Se for autorizado é criada e enviada uma mensagem
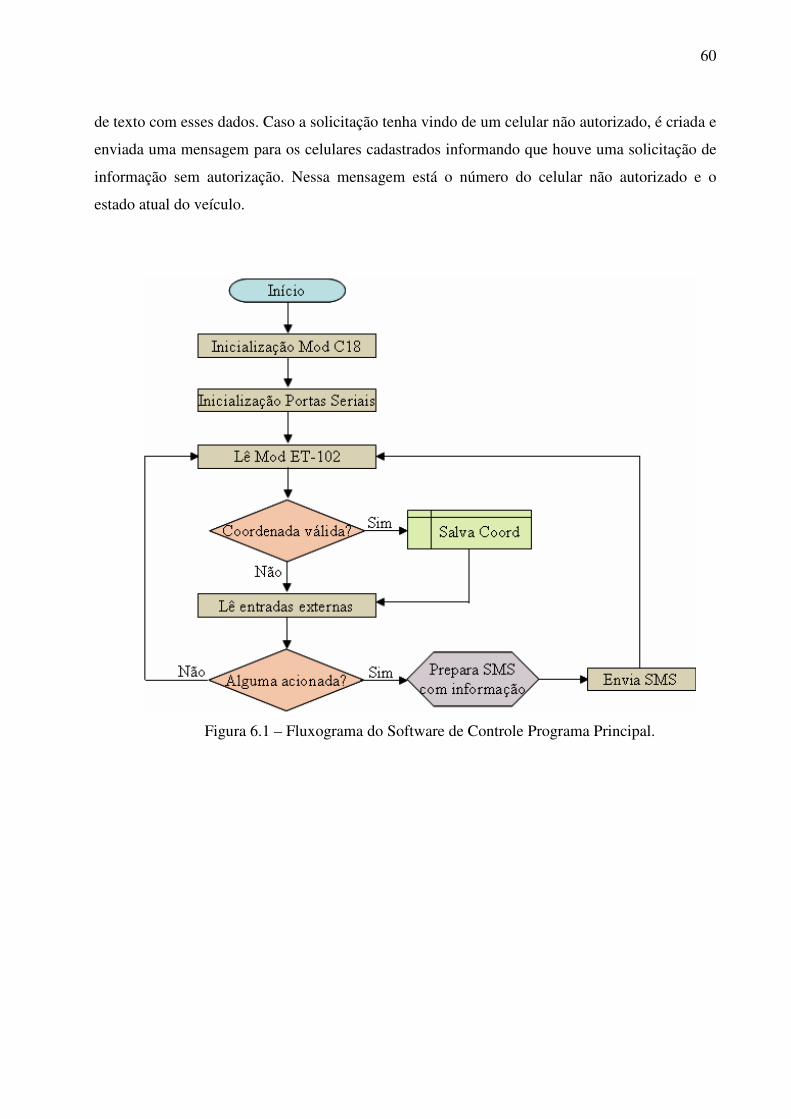
60
de texto com esses dados. Caso a solicitação tenha vindo de um celular não autorizado, é criada e
enviada uma mensagem para os celulares cadastrados informando que houve uma solicitação de
informação sem autorização. Nessa mensagem está o número do celular não autorizado e o
estado atual do veículo.
Figura 6.1 – Fluxograma do Software de Controle Programa Principal.

61
Figura 6.2 – Fluxograma do Software de Atendimento da Interrupção.
62
7. Conclusão
Com o desenvolvimento do presente trabalho compreendeu-se a utilidade e a
funcionalidade de um sistema de rastreamento veicular, que tanto pode ser útil para a aplicação
no controle e otimização de frotas quanto em aplicações de segurança.
Percebe-se a importância da implantação de tal sistema baseado no serviço de mensagens
curtas (SMS), utilizando módulo celular disponível tanto em tecnologia celular GSM como em
CDMA, de forma que se tenha a liberdade de optar pela operadora de telecomunicações que
prestará o serviço. Com isso se ganha um ótimo argumento para negociação de tarifas.
Outro ponto importante é que esse modelo pode ser comercializado como a venda de um
equipamento individual e cobrar-se por isso e pela instalação, ou também pode ser vendido como
um serviço propriamente dito de rastreamento e monitoração veicular. Essa decisão deve ser
tomada mediante o estudo detalhado da viabilidade econômica e financeira de cada modelo, ou
até mesmo de um modelo misto.
63
8. Anexos
64
9. Referências Bibliográficas
Paz, S.M. Cugnasca, C.E. O Sistema de Psicionamento Global (GPS) e suas Aplicações.
Figueirêdo, D.C. Curso Báisco de GPS CONAB Setembro de 2005.
Thurston, J. GALILEO, GLONASS And NAVSTAR A Report on GPS for GIS People
GISCafe.com Março de 2002
Pestana, A. Sistema de Posicionamento Global Navstar/GPS Gabinete de Topografia
Instituto Superior de Engenharia do Porto Junho de 2002.
Tavares, A. F. Jr. Telefonia Celular: uma visão abrangente Universidade Estadual de
Londrina 2004
www.wirelessbrasil.org
www.wirelessbr.com
www.geodesia.org
www.lps.usp.br/lps/arquivos/conteudo/grad/dwnld/
www.colorado.edu/geography/gcraft/notes/gps/gps_f.html
ec.europa.eu/dgs/energy_transport/galileo/index_en.htm

65
tycho.usno.navy.mil/gps.html
www.navcen.uscg.gov/gps/
www.edu-observatory.org







