
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD TICOMÁN
INGENIERÍA AERONÁUTICA
SEMINARIO DE TITULACIÓN
“INGENIERÍA Y MANUFACTURA ASISTIDO POR COMPUTADORA”
“PROPUESTA DE UN MOTOR NEUMÁTICO DE ALETAS PARA APLICACIÓN EN AEROMODELOS DE
ALA FIJA CON ENVERGADURA MÁXIMA DE 50 CENTÍMETROS”
REPORTE FINAL DE INVESTIGACIÓN
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN AERONÁUTICA
P R E S E N T A N:
TAPIA ZAPOTE RODRIGO
TERÁN DELGADO RAFULL ANTONIO
MÉXICO D.F., 1 DE AGOSTO 2007
2
ÍNDICE
GLOSARIO ................................................................................................................. 1
INTRODUCCIÓN .......................................................................................................... 6
CAPÍTULO I PLANTEAMIENTO DEL PROBLEMA .............................................................. 8
1.1 Contexto ......................................................................................................... 8
1.2 Objetivo general ............................................................................................. 8
1.3 Objetivos específicos ..................................................................................... 8
1.4 Justificación.................................................................................................... 9
1.5 Alcance .......................................................................................................... 9
1.6 Metodología ................................................................................................. 10
CAPÍTULO II MARCO TEÓRICO ................................................................................... 11
2.1 Generalidades del CAD/ CAE ...................................................................... 11
2.2 Generalidades de Neumática ....................................................................... 12
2.3 Descripción de lo motores neumáticos ........................................................ 14
2.3.1 Clasificación ........................................................................................... 14
CAPÍTULO III DESPLIEGUE DE LA FUNCIÓN DE CALIDAD ............................................... 22
3.1 Definición ..................................................................................................... 22
3.2 Identificación del cliente ............................................................................... 22
3.3 Determinación de los requerimientos y expectativas de los clientes ............ 22
3.4 Determinación de la importancia de los requerimientos y expectativas de los clientes ............................................................................................................... 24
3.5 Estudio comparativo (Benchmarking) a productos de la competencia ......... 25
3.6 Traducción de los requerimientos y expectativas en términos mesurables de ingeniería ........................................................................................................... 27
3.7 Establecimiento de metas de diseño ............................................................ 27
CAPÍTULO IV DESCRIPCIÓN DE MODELADO ................................................................ 29
4.1 Trazado del rotor. ......................................................................................... 29
4.2 Trazado de la carcasa. ................................................................................. 32
4.3 Trazado de aleta .......................................................................................... 34
4.4 Trazado de tapa ........................................................................................... 36
4.5 Trazado de la bancada. ............................................................................... 40

3
4.6 Ensamble del sistema. ................................................................................. 40
4.7 Selección de materiales para las piezas. ..................................................... 45
4.7.1 Material para rotor.................................................................................. 45
4.7.2 Material para carcasa ............................................................................ 45
4.7.3. Material para aleta ................................................................................ 45
4.7.4 Material para tapa .................................................................................. 46
CONCLUSIONES Y RECOMENDACIONES ...................................................................... 47
Anexo 1 ................................................................................................................ 54
Anexo 2 ................................................................................................................ 55
Anexo 3 ................................................................................................................ 58
BIBLIOGRAFÍA ......................................................................................................... 59

1
GLOSARIO
Aeromodelismo: Afición con un elevado componente científico y técnico cuyo
objetivo es diseñar, construir y hacer volar aviones a escala,
bien como réplica lo más exacta posible de otros existentes o
bien diseñados exclusivamente para aeromodelismo.
Bancada: Basamento donde se apoya no sólo un motor, sino también
una máquina.
Bar: Unidad de medida de la presión atmosférica, equivalente a
100 000 pascales. (Símb. bar).
Biocombustible: Combustible de origen biológico
Booleana: Operación, Álgebra Booleana estudiada por primera vez en
detalle por George Boole, En CAD se definen como
operaciones de suma, substracción, adición, multiplicación y
división de objetos.
CAD: Computer Aided Design, Diseño asistido por computadora.
CAE: Computer Aided Engineering, Ingeniería Asistida por
Computadora.
CAM: Computer Aided Manufacturing, Fabricación Asistida por
Computadora.
Carcasa: Armazón que contiene componentes de un aparato.
Centrífugo: Que se aleja del centro o tiende a alejar de él.
Compresor: Elemento cuyo funcionamiento es la de comprimir cualquier
gas.
Envergadura: Distancia que hay entre las puntas de un ala.

2
Émbolo: Barra cuyos movimientos se encuentran limitados a una sola
dirección como consecuencia del empleo de guías para
comprimir un fluido o para recibir de él movimiento.
Estanqueidad: Hermeticidad.
Estator: Parte fija de una máquina rotativa, la cual alberga una parte
móvil (rotor), ejemplo en los motores eléctricos el estator esta
compuesto por un imán natural (en pequeños motores de
corriente continua) o por una o varias bobinas montadas sobre
un núcleo metálico que generan un campo magnético.
Fuerza: Cualquier acción o influencia capaz de modificar el estado de
movimiento de un objeto. El aparato que permite medirlas se
denomina dinamómetro.
Hardware: Conjunto de elementos materiales que componen un
ordenador. En dicho conjunto se incluyen los dispositivos
electrónicos y electromecánicos, circuitos, cables, tarjetas,
armarios o cajas, periféricos de todo tipo y otros elementos
físicos.
Helicoidal: En forma de hélice o de helicoide.
Ignición: Acción y efecto de estar un cuerpo ardiendo o incandescente.
Matriz: Conjunto ordenado, en una estructura de filas y columnas. Los
elementos de este conjunto pueden ser objetos matemáticos
muy variados.
Newton: Unidad de fuerza del Sistema Internacional, equivalente a la
fuerza que, aplicada a un cuerpo cuya masa es de un
kilogramo, le comunica una aceleración de un metro por
segundo cada segundo. (Símb. N).

3
Par: Sistema de dos fuerzas iguales paralelas, de sentidos
contrarios y aplicadas en dos puntos distintos, que crean un
movimiento de rotación.
Pascal: Unidad de presión del Sistema Internacional, equivalente a la
presión uniforme que ejerce la fuerza de un newton sobre la
superficie plana de un metro cuadrado. (Símb. Pa).
Piñón: Rueda pequeña y dentada que engrana con otra mayor en una
máquina.
Pistón: Émbolo de un cilindro en un motor.
Plástico: Dicho de ciertos materiales sintéticos: Que pueden moldearse
fácilmente y en cuya composición entran principalmente
derivados de la celulosa, proteínas y resinas.
Policarbonato: El policarbonato es un grupo de termoplásticos fácil de
trabajar, moldear y termo formar, y son utilizados ampliamente
en la manufactura moderna. El nombre "policarbonato" se
basa en que se trata de polímeros que presentan grupos
funcionales unidos por grupos carbonato (-O-(C=O)-0-) en una
larga cadena molecular.
Poliuretano: Es un polímero orgánico formado por el monómero uretano y
un isocianato, es usado en la industria para formar una
espuma de determinadas características térmicas y/o
resilentes.
Potencia: Cantidad de trabajo efectuado por unidad de tiempo.
Presión: Magnitud física que expresa la fuerza ejercida por un cuerpo
sobre unidad de superficie. Su unidad en el Sistema
Internacional es el pascal.

4
QFD: Quality Functional Deployment, Despliegue de la Función de la
Calidad.
Rotor: Parte móvil de una máquina rotativa que gira dentro de una
parte fija llamada estator, como por ejemplo el que llevan los
motores eléctricos, los cuales están equipados con un núcleo
metálico sobre el que se montan unas bobinas eléctricas.
RPM: Revoluciones por minuto.
Sistema: Grupo de componentes relacionados que interactúan para
realizar una tarea determinada.
Software: Conjunto de programas que puede ejecutar el hardware para
la realización de las tareas de computación a las que se
destina.
Teflón: Teflón es el nombre popular del politetrafluoretileno (PTFE). El
PTFE es un polímero similar al polietileno, donde los átomos
de hidrógeno están sustituidos por flúor.
Turbina de Gas: Máquina térmica que desarrolla trabajo al expansionar un gas.
La máquina turbina de gas se puede considerar un motor de
combustión interna. Está compuesta principalmente por un
compresor, una o varias cámaras de combustión y la turbina
de gas propiamente dicha.
Turborreactor: El turborreactor, es un tipo de motor que a diferencia de los
alternativos que tienen un funcionamiento discontinuo
(explosiones) estos motores tienen un funcionamiento
continuo. Constan de las mismas fases que un motor
alternativo: Compresión, combustión y expansión.
Trabajo: Producto de la fuerza por el camino que recorre su punto de
aplicación.
5
Vatio: Unidad de potencia eléctrica del Sistema Internacional, que
equivale a un julio por segundo. (Símb. W).
Velocidad: Magnitud física que expresa el espacio recorrido por un móvil
en la unidad de tiempo. Su unidad en el Sistema Internacional
es el metro por segundo (m/s).
6
INTRODUCCIÓN
Un motor es un sistema que genera un trabajo mecánico y/o propulsión, resultado
de la transformación de energía normalmente obtenida a partir de un combustible
fósil o de una fuente eléctrica.
Los motores eléctricos funcionan gracias a una diferencia de cargas entre el rotor
y la carcasa, el efecto de rechazo imprime una velocidad angular en función del
potencial de la corriente.
En el caso de los motores de combustión interna, funcionan gracias a pequeñas
igniciones dentro de una cámara; de un modo sincronizado la alta presión que
surge de la combustión es encaminada a través de un elemento mecánico llamado
biela encargado de transmitir el movimiento a la flecha del motor.
Una turbina de gas utiliza el mismo principio de combustión interna, aunque difiere
en el método, cantidad y características de funcionamiento de sus elementos
respecto a un motor de émbolo.
La disposición de los elementos más importantes en este tipo de motores es
coaxial. Un compresor succiona aire de sus alrededores imprimiendo un
incremento de presión. El aire comprimido entra entonces a la cámara de
combustión donde se mezcla con el combustible provocando ignición. Los gases
generados salen a alta presión y llegan a una turbina que aprovecha una parte de
esa presión convirtiéndola en movimiento mecánico generalmente redirigido al
compresor. En un turborreactor los gases de escape de la turbina auxiliados por
un cono de salida intensifican el efecto impulsor del motor transformando la alta
presión en velocidad.
Dentro del aeromodelismo es común encontrar motores que utilizan medios
energéticos contaminantes. De ahí la importancia en buscar otras opciones de
propulsión que sean acordes en términos económicos y de medio ambiente a las
necesidades actuales.

7
La propuesta que aquí se presenta, un motor de aire comprimido de aletas, ofrece
una alternativa en la generación de movimiento mecánico a través de una energía
renovable. Económico, sencillo y con un amplio sentido medioambiental promete
explotar un recurso tan abundante como el aire, amén de crear nuevos retos en la
generación de energía mecánica limpia.
En el primer capítulo se describe de manera general el contexto en que se
desenvuelve el proyecto, denotándose el objetivo general y aquellos objetivos
específicos a alcanzar. La hipótesis y metodología precedidas por el alcance y
delimitación del proyecto ofrecerán al lector una guía a lo largo del trabajo.
En el segundo capítulo se introduce el marco teórico, punto importante en la
comprensión de las ideas generales y conceptos que enmarcan el tema.
En el tercer capítulo se presenta un estudio bajo el esquema de despliegue de la
función de calidad de las características de motores neumáticos de aletas y de
pistón de combustión interna. Finalmente se presenta el prototipo básico del motor
a desarrollar.
En el cuarto capítulo se describe de forma general el modelado, condiciones de
trabajo y desarrollo del prototipo bajo un ambiente CAD. Se presentan los dibujos
de cada pieza y un ensamble general del motor.
Finalmente se presentan las conclusiones y recomendaciones.

8
CAPÍTULO I PLANTEAMIENTO DEL PROBLEMA
1.1 Contexto
En la actualidad, las necesidades energéticas de la humanidad ya no deben
depender de medios costosos y agresivos con el media ambiente.
Se han propuesto innumerable cantidad de soluciones, de entre las cuales
destacan los biocombustibles, que conllevan un elevado costo social. Ejemplo de
lo anterior es la reciente crisis social que vivió México, cuando la especulación del
precio del maíz, producto pilar de la alimentación de esta sociedad y que puede
ser utilizado para generar etanol, afectó seriamente su estabilidad económica.
No obstante también se han estudiado las bondades del uso del aire comprimido,
que tiene un bajo costo de producción y no tiene los riesgos sociales y
económicos que representan los biocombustibles. Y sin embargo no ha
considerado como una opción importante.
1.2 Objetivo general
Establecer las bases del diseño conceptual de un motor neumático de aletas para
su utilización en aeromodelos con envergadura menor a 50 centímetros..
1.3 Objetivos específicos
Presentar el contexto bajo el cual se propone el desarrollo de este proyecto.
Mostrar los diversos motores neumáticos que existen.
Mostrar las características generales del tipo de motores neumáticos de aletas.
Aplicar la filosofía de despliegue de la función de calidad para delimitar
características del motor a diseñar.

9
Describir como se modela el motor neumático en el software Unigraphics NX3.
Establecer los materiales más apropiados para la construcción del motor.
Presentar planos de las piezas modeladas.
1.4 Justificación
Año con año se consumen miles de galones de combustibles y se utilizan millones
de baterías, lo cual se traduce en fuentes de contaminación directa al medio
ambiente, en conflictos bélicos o políticos por controlar los recursos energéticos y
por ultimo en la degradación de la salud.
Es necesario implementar mecanismos que permitan el uso de medios
energéticos responsables del medio ambiente y no menospreciar actividades tales
como el aeromodelismo, que si bien genera poca contaminación, no esta exenta
de utilizar combustibles o baterías.
1.5 Alcance
El presente trabajo lejos de contemplar la elaboración de un cálculo detallado de
las características del diseño del motor neumático, solo plantea los elementos
necesarios para comenzar el diseño conceptual, utilizando las herramientas
aprendidas en el Seminario de Titulación “Ingeniería y manufactura asistido por
computadora”.
Esta propuesta esta definida con en base a un estudio de las características de
motores neumáticos ya existentes, que si bien no han sido diseñados para su
aplicación en aeromodelismo, sirven de guía en el establecimiento de los
lineamientos generales para la primera aproximación de diseño.
Tales lineamientos en conjunto con la geometría propuesta representan un punto
fundamental de la presente obra y ofrece al lector interesado dar continuidad a
este proyecto.
10
1.6 Metodología
Ubicar el entorno en que se desarrolla el proyecto.
Familiarizar al lector con el tipo de software que se utilizó en el desarrollo del
proyecto.
Apreciar las ventajas y desventajas que ofrecen los diversos motores neumáticos
que existen.
Seleccionar y profundizar en la descripción de las características del motor
neumático que ofrezca mejores condiciones para desempeñar la función
designada.
Presentar un análisis de diversos motores neumáticos existentes, a través del
método de despliegue de calidad (QFD).
Proponer y generar la geometría del motor neumático que se considera adecuada.
Proponer los materiales con los que se debe construir el motor neumático.
Presentar los planos de las piezas que integran el sistema.
Establecer las conclusiones y recomendaciones para este proyecto.

11
CAPÍTULO II MARCO TEÓRICO
2.1 Generalidades del CAD/ CAE
Diseño asistido por computadora / Fabricación asistida por computadora, acrónimo
de Computer-Aided Design / Computer-Aided Manufacturing. Se trata de una
disciplina que estudia el uso de sistemas informáticos como herramienta de
soporte en todos los procesos involucrados en el diseño y la fabricación de
cualquier tipo de producto. Esta disciplina se ha convertido en un requisito
indispensable para la industria actual que se enfrenta a la necesidad de mejorar la
calidad, disminuir los costes y acortar los tiempos de diseño y producción.
El CAD es una tecnología implicada en el uso de computadoras para realizar
tareas de creación, modificación, análisis y optimización de un diseño. Las
herramientas de CAD abarcan desde herramientas de modelado geométrico hasta
aplicaciones a medida para el análisis u optimización de un producto especifico.
Entre estos dos extremos se encuentran herramientas de modelado y análisis de
tolerancias, calculo de propiedades físicas (masa, volumen, momentos, etc.),
modelado y análisis de elementos finitos, ensamblado, etc. La función principal en
estas herramientas es la definición de la geometría del diseño (pieza mecánica,
arquitectura, circuito electrónico, etc.) ya que la geometría es esencial para las
actividades subsecuentes en el ciclo de producto.
La geometría de un objeto se usa en etapas posteriores en las que se realizan
tareas de ingeniería y fabricación. De esta forma se habla también de Ingeniería
asistida por Computadora o Computer Aided Engineering (CAE) para referirse a
las tareas de análisis, evaluación, simulación y optimización, desarrolladas a lo
largo del ciclo de vida del producto. Este es el mayor de los beneficios de la
tecnología CAD, la reutilización de la información creada en la etapa de síntesis en
las etapas de análisis.

12
La Ingeniería Asistida por Computadora (Computer Aided Engineering o CAE) es
la tecnología que se ocupa del uso de sistemas informáticos para analizar la
geometría generada por las aplicaciones de CAD, permitiendo al diseñador
simular y estudiar el comportamiento del producto para refinar y optimizar dicho
diseño. Existen herramientas para un amplio rango de análisis pero la más
recurrente a nivel ingeniería es el método de elemento finito o FEM (Finite Element
Method). En este método, la estructura se representa por un modelo de análisis
constituido de elementos interconectados que dividen el problema en elementos
manejables por la computadora.
La ventaja del análisis y la posibilidad de optimización de diseños permite a los
ingenieros determinar cómo se va a comportar el diseño y eliminar errores sin la
necesidad gastar tiempo y dinero construyendo y evaluando prototipos reales. Ya
que el coste de reingeniería crece exponencialmente en las últimas etapas del
desarrollo de un producto y en la producción, la optimización temprana que
permiten las herramientas CAE supone un gran ahorro de tiempo y una notable
disminución de costes.
2.2 Generalidades de Neumática
La palabra neumática se deriva del griego “Pneumos” que significa respiración o
soplo, y se define como la parte de la física que trata la dinámica de los
fenómenos con gases o vacío, estudiando la conversión de energía neumática en
mecánica.
La neumática entonces, consta del flujo y la presión de gases en sistemas de
potencia fluida es decir, transmisión de potencia mediante fluidos.
La neumática moderna inicia en Europa a partir de la mitad del siglo XX debido a
la latente necesidad de una automatización racional del trabajo. En la actualidad
ya no se concibe una moderna explotación industrial sin el aire comprimido.
La energía neumática, que emplea aire comprimido como fuente de potencia, tiene
cualidades excelentes entre las que destacan:

13
• El aire es de fácil captación y abundante.
• El aire no posee propiedades explosivas, por lo que no existen riesgos de
chispas.
• Los actuadores pueden trabajar a velocidades razonablemente altas y
fácilmente regulables.
• El trabajo con aire no daña los componentes de un circuito por efecto de
golpes de ariete.
• Las sobrecargas no constituyen situaciones peligrosas o que dañen los
equipos en forma permanente.
• Los cambios de temperatura no afectan en forma significativa.
• Energía limpia.
• Cambios instantáneos de sentido.
Para delimitar el campo de utilización de la neumática es preciso conocer también
las propiedades adversas:
• Preparación: El aire comprimido debe ser preparado, antes de su
utilización. Es preciso eliminar impurezas y humedad (al objeto de evitar un
desgaste prematuro de los componentes).
• Compresible: Con aire comprimido no es posible obtener para los émbolos
velocidades uniformes y constantes.
• Fuerza: El aire comprimido es económico sólo hasta cierta fuerza.
Condicionado por la presión de servicio normalmente usual de 700 kPa (7
bar), el límite, también en función de la carrera y la velocidad, es de 20.000
a 30.000 N.
• Escape: El escape de aire produce ruido. No obstante, este problema ya se
ha resuelto en gran parte, gracias al desarrollo de materiales que
disminuyen el ruido.
• Costos: El aire comprimido es una fuente de energía relativamente cara,
este elevado costo se compensa en su mayor parte por los elementos de
precio económico y el buen rendimiento (cadencias elevadas).

14
2.3 Descripción de lo motores neumáticos
Los motores de aire comprimido son elementos que transforman la energía
neumática en movimiento de giro mecánico. Su ángulo de giro no está limitado y
recientemente ha sido uno de los elementos de trabajo más empleados por sus
muchas ventajas: poseen un diseño compacto y ligero, desarrollan más potencia
con relación a su tamaño que la mayoría de los otros tipos de motores, no se
dañan cuando se bloquean por sobrecargas, su mantenimiento es mínimo, no se
queman y no se calientan cuando se sobrecargan.
2.3.1 Clasificación
Según su concepción se distinguen:
- Motores de émbolo
- Motores de engranes
- Motores de aletas
Motores de émbolo
Este tipo se subdivide además en motores de émbolo axial y de émbolo radial. Por
medio de cilindros de movimiento alternativo, el aire comprimido acciona, a través
de una biela, el cigüeñal del motor. Se necesitan varios cilindros con el objeto de
asegurar un funcionamiento libre de sacudidas. La potencia de los motores
depende de la presión de entrada, del número de émbolos y de la superficie y
velocidad de éstos.
15
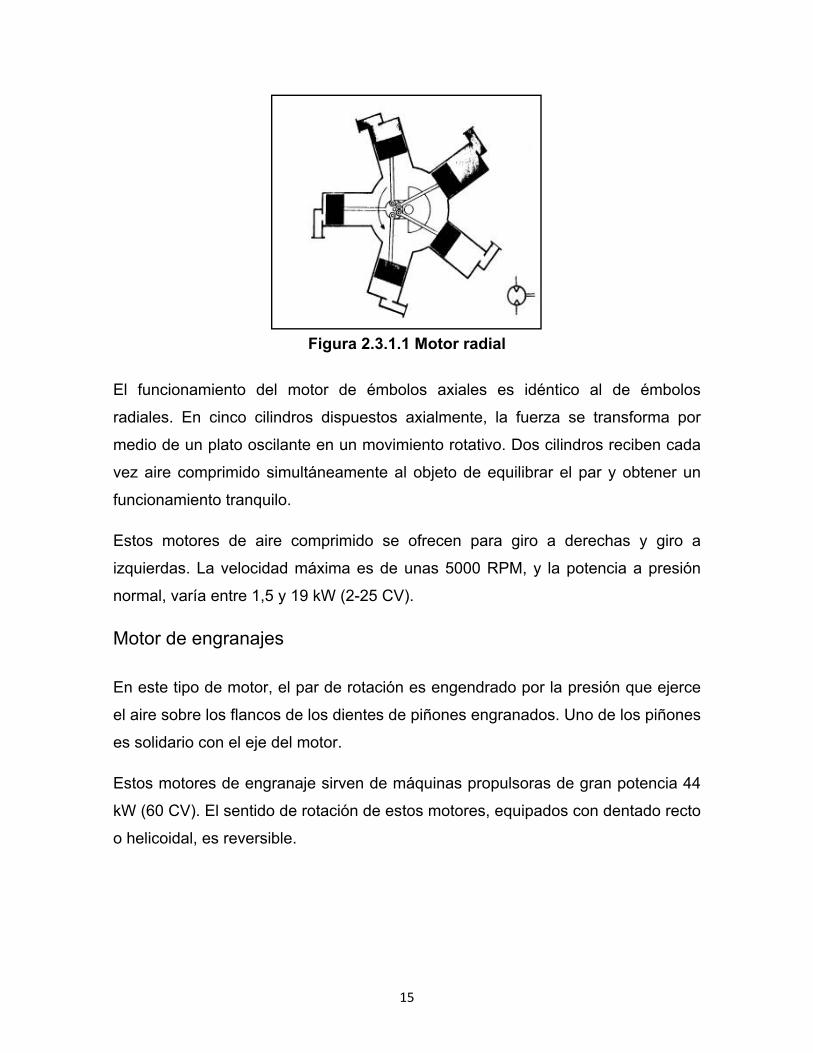
Figura 2.3.1.1 Motor radial
El funcionamiento del motor de émbolos axiales es idéntico al de émbolos
radiales. En cinco cilindros dispuestos axialmente, la fuerza se transforma por
medio de un plato oscilante en un movimiento rotativo. Dos cilindros reciben cada
vez aire comprimido simultáneamente al objeto de equilibrar el par y obtener un
funcionamiento tranquilo.
Estos motores de aire comprimido se ofrecen para giro a derechas y giro a
izquierdas. La velocidad máxima es de unas 5000 RPM, y la potencia a presión
normal, varía entre 1,5 y 19 kW (2-25 CV).
Motor de engranajes
En este tipo de motor, el par de rotación es engendrado por la presión que ejerce
el aire sobre los flancos de los dientes de piñones engranados. Uno de los piñones
es solidario con el eje del motor.
Estos motores de engranaje sirven de máquinas propulsoras de gran potencia 44
kW (60 CV). El sentido de rotación de estos motores, equipados con dentado recto
o helicoidal, es reversible.

16
Figura 2.3.1.2 Motor de engranajes
Motores de aletas
Por su construcción sencilla y peso reducido, los motores de aire comprimido
generalmente se fabrican como máquinas de rotación.
Un rotor excéntrico dotado de ranuras gira en una cámara cilíndrica. En las
ranuras se deslizan aletas, que son empujadas contra la pared interior del cilindro
por el efecto de la fuerza centrífuga, garantizando así la estanqueidad de las
diversas cámaras. Bastan pequeñas cantidades de aire para empujar las aletas
contra la pared interior del cilindro, en parte antes de poner en marcha el motor.
En otros tipos de motores, las aletas son empujadas por la fuerza de resortes. Por
regla general estos motores tienen de 3 a 10 aletas, que forman las cámaras en el
interior del motor. En dichas cámaras puede actuar el aire en función de la
superficie de ataque de las aletas. El aire entra en la cámara más pequeña y se
dilata a medida que el volumen de la cámara aumenta.
También de este motor hay unidades de giro a derechas y de giro a izquierdas, así
como de potencias conmutables de 0,1 a 17 kW (0,1 a 24 CV).
Como norma general, los motores deben trabajar con una precarga para evitar
que giren a velocidades altas. Al girar en vacío el motor, el número de veces que
las aletas rozan sobre el cilindro es casi doble que en carga. Esto supone un
17
desgaste innecesario de las aletas y de la pared del cilindro sobre la que deslizan.
La vida de las aletas se prolongará a varios cientos de horas trabajando el motor a
velocidades moderadas y metiendo aire al motor debidamente limpio y lubricado
con aceite en suspensión.
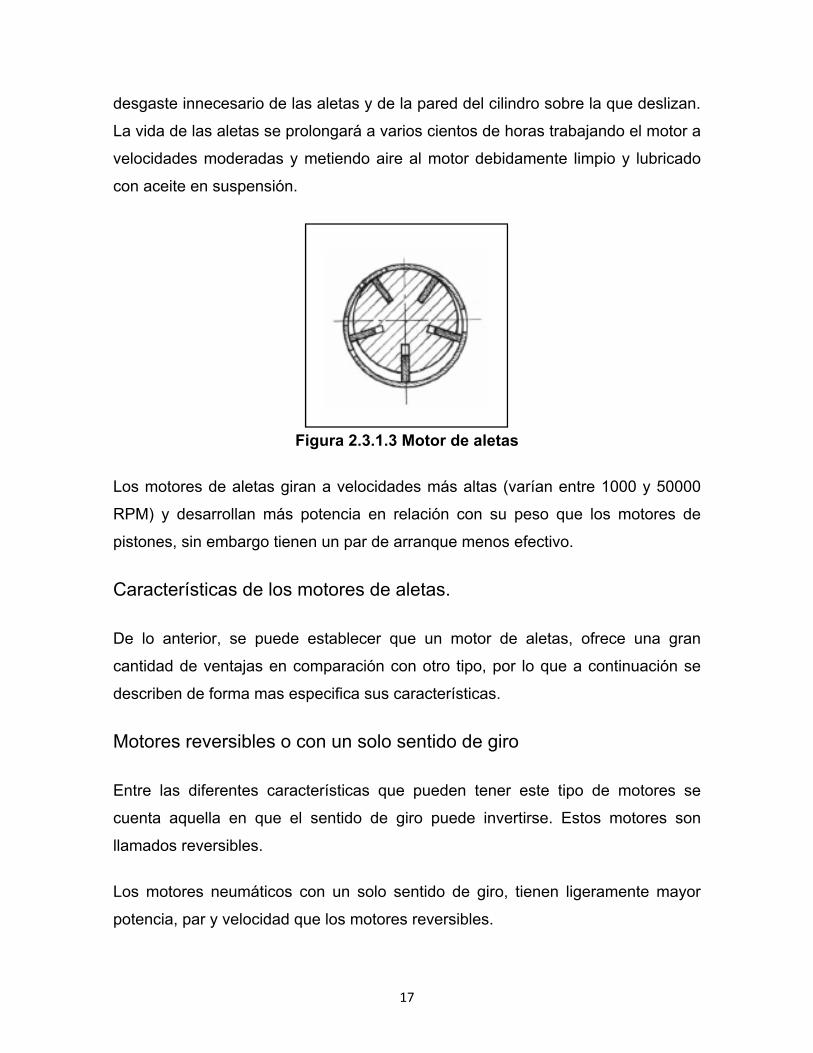
Figura 2.3.1.3 Motor de aletas
Los motores de aletas giran a velocidades más altas (varían entre 1000 y 50000
RPM) y desarrollan más potencia en relación con su peso que los motores de
pistones, sin embargo tienen un par de arranque menos efectivo.
Características de los motores de aletas.
De lo anterior, se puede establecer que un motor de aletas, ofrece una gran
cantidad de ventajas en comparación con otro tipo, por lo que a continuación se
describen de forma mas especifica sus características.
Motores reversibles o con un solo sentido de giro
Entre las diferentes características que pueden tener este tipo de motores se
cuenta aquella en que el sentido de giro puede invertirse. Estos motores son
llamados reversibles.
Los motores neumáticos con un solo sentido de giro, tienen ligeramente mayor
potencia, par y velocidad que los motores reversibles.

18
Presión de trabajo
Los motores neumáticos pueden trabajar entre 3 y 7 bares, aunque la presión
normal de trabajo es cercana a 6 bares. Los motores, están diseñados para dar
sus mejores características a esta presión. Aunque pueden trabajar por debajo de
3 bares, a esta presión tan baja, el rendimiento de los motores puede ser
insuficiente para el trabajo solicitado aunque no está generalizado para todos los
usos. Por otra parte, también pueden trabajar por encima de 7 bares, pero con
riesgo de favorecer el desgaste.
Potencia
La curva de potencia correspondiente a un motor sin regulador de velocidad es de
forma aproximada a la que figura a continuación.
Figura 2.3.1.4 Curva de Potencia
La velocidad se sitúa sobre el eje horizontal, mientras que la potencia y el par lo
hacen en el eje vertical. En la figura se ve que la potencia es cero para velocidad
cero y que va incrementándose cuando se incrementa la velocidad hasta un
máximo que corresponde con la mitad de las revoluciones libres del motor. A partir
19
de ese punto si se incrementa la velocidad, la potencia disminuye hasta cero
cuando el motor gira a las máximas revoluciones (revoluciones libres). Los
motores neumáticos obtienen la mayor parte de su potencia por la fuerza con que
el aire actúa sobre las aletas o los pistones. Otra parte de la potencia se obtiene
por la expansión del gas comprimido esta no es de ningún modo la principal fuente
de creación de potencia ya que no es práctica porque cuando el aire se expande,
se enfría. Una expansión excesiva ocasiona la formación de hielo en los orificios
de salida del aire ahogando al motor. La mayor cantidad de expansión que puede
usarse con seguridad sin que se forme hielo es del 20%.
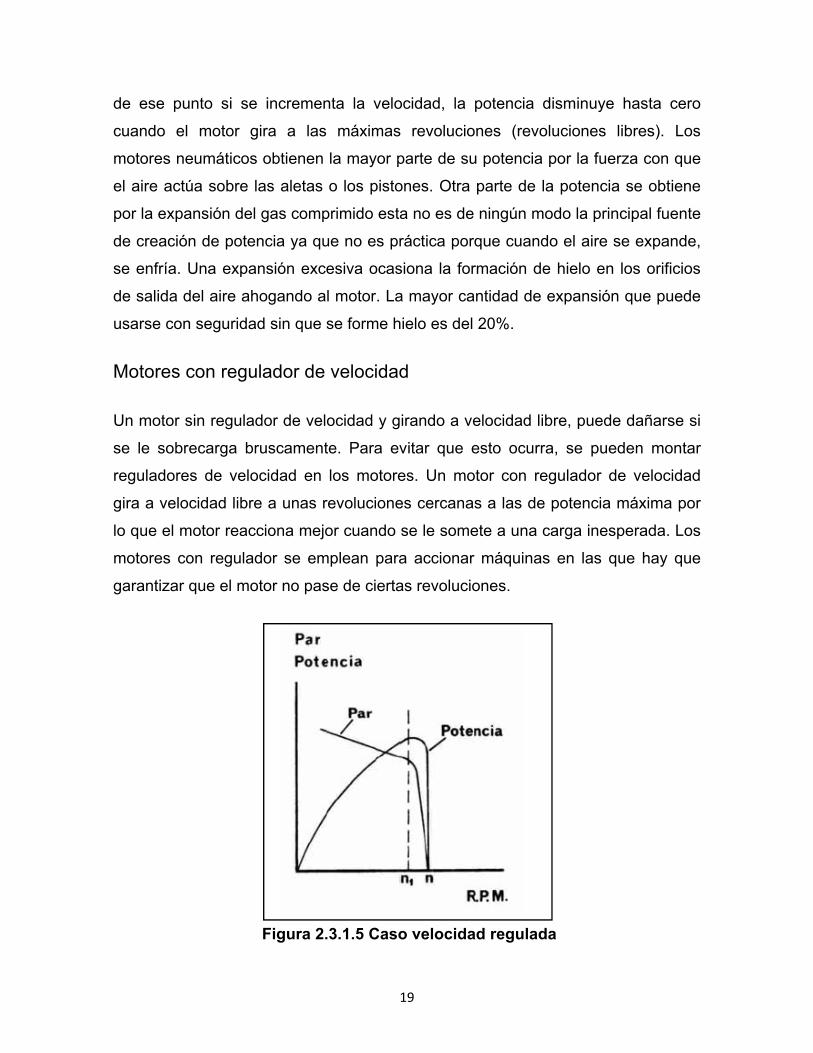
Motores con regulador de velocidad
Un motor sin regulador de velocidad y girando a velocidad libre, puede dañarse si
se le sobrecarga bruscamente. Para evitar que esto ocurra, se pueden montar
reguladores de velocidad en los motores. Un motor con regulador de velocidad
gira a velocidad libre a unas revoluciones cercanas a las de potencia máxima por
lo que el motor reacciona mejor cuando se le somete a una carga inesperada. Los
motores con regulador se emplean para accionar máquinas en las que hay que
garantizar que el motor no pase de ciertas revoluciones.
Figura 2.3.1.5 Caso velocidad regulada

20
Par Motor
El par alcanza su valor máximo cuando el motor comienza a girar (velocidad
cercana a cero) y cae rápidamente (casi linealmente) hasta cero cuando el motor
gira a velocidad libre.
Si se va aumentando la carga al motor, la velocidad del motor baja y el par se
incrementa hasta que al llegar a velocidad cero, se bloquea el motor. Si por el
contrario, la carga disminuye, el motor aumenta su velocidad y el par disminuye
hasta ajustarse a la carga aplicada.
El par al cual el motor se atasca, es, aproximadamente, el doble del par que tiene
el motor girando a máxima potencia.
El par de arranque de un motor es el que el motor puede desarrollar cuando
arranca bajo carga. Dependiendo de la posición de las aletas en el cilindro con
respecto a la entrada y la salida de aire, en el momento del arranque, el valor del
par de arranque está entre dos valores: máximo y mínimo.
El par de arranque mínimo es el que figura en los catálogos como par de arranque
y suele ser el 75% del par de atascamiento o bloqueo del motor. Este último
también puede considerarse cercano al valor del par máximo de arranque
Figura 2.3.1.6 Par Motor
21
Velocidad
La velocidad libre de los motores neumáticos, varía desde cero hasta 30000
R.P.M. La velocidad en carga, debe ser la mitad de la velocidad libre de un motor
sin regulador. La velocidad en carga para un motor con regulador es
aproximadamente el 80% de la velocidad libre del motor.
Para poder obtener velocidades más bajas de trabajo, los motores neumáticos se
equipan con diferentes reducciones. Con la misma potencia se obtienen menos
revoluciones y mayor par.
22
CAPÍTULO III DESPLIEGUE DE LA FUNCIÓN DE CALIDAD
3.1 Definición
Despliegue de la Función de Calidad (Quality Function Deployment, QFD por sus
siglas en inglés) es una filosofía que “busca focalizar el diseño de productos y
servicios para dar respuesta a las necesidades de los clientes”.
Estas necesidades se incorporan dentro del proceso de diseño y se les asigna
metas mesurables, con el objetivo de poder centrar esfuerzos en dar una
respuesta efectiva a las características que requiere el cliente.
Para la etapa de comprensión de este problema, la metodología QFD se puede
aplicar en los siguientes pasos.
3.2 Identificación del cliente
Aeromodelistas, entrenadores, profesores, aficionados e incluso industrias
jugueteras, por la necesidad de incurrir en nuevos ámbitos que sean favorables y
más económicos, son clientes potenciales para la adquisición del motor que se
propone.
3.3 Determinación de los requerimientos y expectativas de los clientes
Necesidades generales
Dentro de los características que un motor debe contemplar en su diseño
destacan la relación peso-potencia y el grado de eficiencia energética. En un
motor de combustión interna la eficiencia energética es mucho menor (del 26% al
32%) en comparación con un motor eléctrico (70% a 92%), destacando el
homologo neumático (80% a 92% aproximado).

23
Características de diseño
Una vez establecidas las necesidades generales se procede a identificar las
características de diseño1.
Potencia (hp): Para poder mover una hélice similar a las que utilizan los motores a
gasolina.
Valor = 0.45 a 0.5 Hp
Rango de RPM: Para conseguir una eficiencia adecuada de la hélice.
Valor = 1500 a 20000 RPM
Tamaño (cm): Para reducir la resistencia al avance producida por el motor.
Valor = 6x7x1.5 cm.
Capacidad Volumétrica del Motor (cm3).
Valor = 2.5 cm3.
Relación Peso/Potencia.
Valor = Entre 400 y 300.
Los requerimientos obtenidos fueron los siguientes:
1. Económicos
1.1. Gasto de inversión para desarrollo del producto $15000 a $20000
1.2. Costo unitario $ 780 a $1000
2. Funcionales
2.1. Rendimiento, aprovechamiento de la energía.
2.2. Armado sencillo, poco número de piezas que integran el ensamble. 1 Los valores de potencia, RPM, capacidad volumétrica y relación peso‐potencia utilizados como referencia para el diseño, fueron tomados de un motor de 2.5 centímetros cúbicos de desplazamiento. (ver Anexo 1)
24
2.3. Resistente a impactos.
3. Apariencia
3.1. Tamaño, de aspecto similar a un motor de 2.5 centímetros cúbicos de
desplazamiento.
3.2. Peso.
3.3. Materiales, altamente durables.
4. Manufacturabilidad
4.1. Medios de fabricación disponibles.
4.2. Disponibilidad de materia primera de calidad.
5. Conservación
5.1. Periodo de mantenimiento.
5.2. Refacciones accesibles, a bajo costo.
3.4 Determinación de la importancia de los requerimientos y
expectativas de los clientes
Una vez identificados los requerimientos y expectativas de los clientes, se está en
la posibilidad de dividirlos en dos grupos. El primero abarca aquellos
requerimientos obligatorios que poseen en mismo nivel de prioridad en el diseño.
Éstos son puntos obligatorios a alcanzar y su cumplimiento debe ser total. El
segundo grupo abarca todos los aspectos deseables, aquellos que se han
propuesto en función del mejoramiento del producto. Poseen generalmente un
valor cualitativo y en su ponderación está implícito el propósito de este paso.
En la siguiente tabla se presenta la determinación del grado de importancia
relativa (Ir) de los requerimientos deseables. En cada línea un requerimiento es
comparado con otro, si el requerimiento es más importante que con el que se
compara se le asigna un signo (+), de lo contrario su valor será (-).

25
Tabla 1. Ponderación de los requerimientos deseables
Requerimientos Deseables
Req
uerim
ient
os
Des
eabl
es1
2.1 2.2 3.2 3.3 5.1 Σ (+) Ir (%)
2.1 0 + - + + 3 30
2.2 - 0 - + + 3 30
3.2 + + 0 + + 4 40
3.3 - - - 0 - 0 0
5.1 - - - + 0 0 0
Total 10 100 1 Clasificación de los requerimientos de acuerdo al punto 3.3
De lo anterior se traduce que el peso es el factor que tiene mayor relevancia,
seguido muy de cerca por el rendimiento y un armado sencillo. Estas
características tendrán también un valor adicional en el diseño del motor
neumático.
3.5 Estudio comparativo (Benchmarking) a productos de la
competencia
El estudio comparativo se llevo al cabo con la información de cuatro motores (ver
anexo 1 y 2):
Enya SS15ABC-BB. Mono pistón de combustión interna, 0.5 hp
OBER LGSHR. Neumático de aletas, 0.53 hp
IR M004RHR000AR3. Neumático de aletas, 0.5 hp
Desoutter HM-4600. Neumático de aletas, 0.6 hp
Es posible apreciar que el rango de potencia en estos motores se sitúa entre los
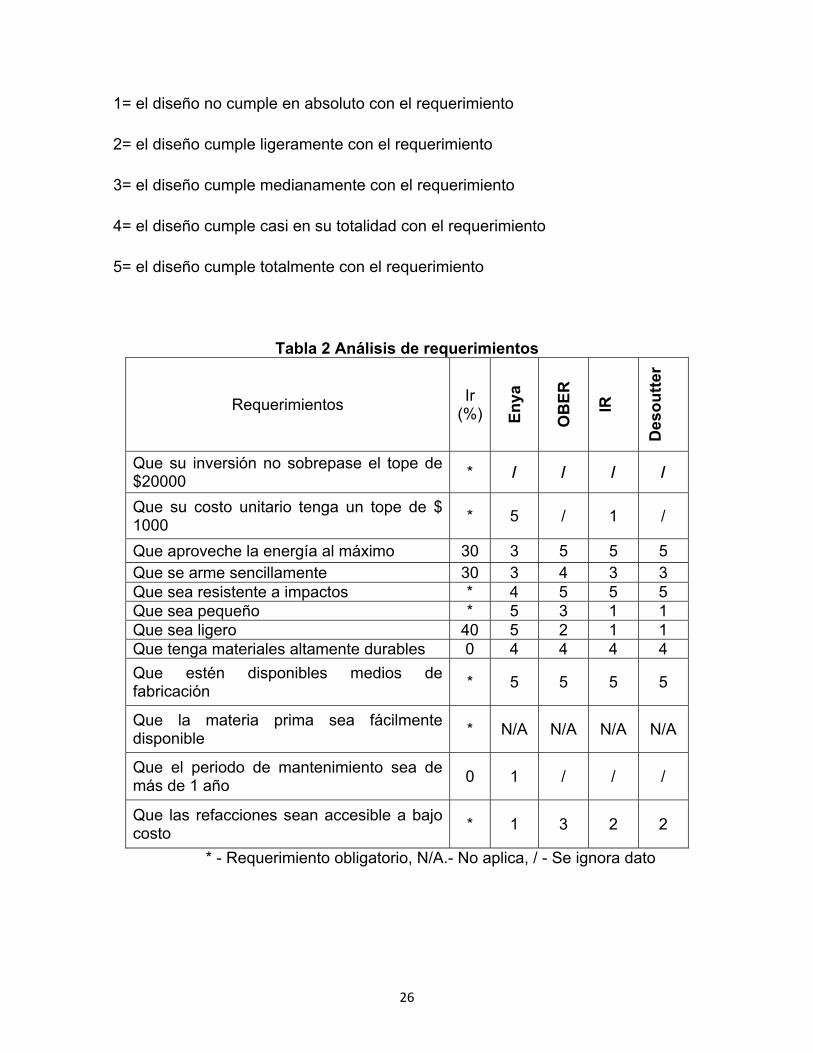
0.5 y 0.6 caballos de fuerza. En la siguiente parte se presenta una escala del 1 al
5 en donde el diseño es calificado cualitativamente respecto a si se adecua o no al
requerimiento deseado.
26
1= el diseño no cumple en absoluto con el requerimiento
2= el diseño cumple ligeramente con el requerimiento
3= el diseño cumple medianamente con el requerimiento
4= el diseño cumple casi en su totalidad con el requerimiento
5= el diseño cumple totalmente con el requerimiento
Tabla 2 Análisis de requerimientos
Requerimientos Ir (%) En
ya
OB
ER
IR
Des
outte
r
Que su inversión no sobrepase el tope de $20000 * / / / /
Que su costo unitario tenga un tope de $ 1000 * 5 / 1 /
Que aproveche la energía al máximo 30 3 5 5 5 Que se arme sencillamente 30 3 4 3 3 Que sea resistente a impactos * 4 5 5 5 Que sea pequeño * 5 3 1 1 Que sea ligero 40 5 2 1 1 Que tenga materiales altamente durables 0 4 4 4 4 Que estén disponibles medios de fabricación * 5 5 5 5
Que la materia prima sea fácilmente disponible * N/A N/A N/A N/A
Que el periodo de mantenimiento sea de más de 1 año 0 1 / / /
Que las refacciones sean accesible a bajo costo * 1 3 2 2
* - Requerimiento obligatorio, N/A.- No aplica, / - Se ignora dato

27
3.6 Traducción de los requerimientos y expectativas en términos
mesurables de ingeniería
La mayoría de los requerimientos expuestos anteriormente poseen la cualidad de
ser mesurables. La excepción en el caso de un “armado sencillo”, se traduce a
continuación a fin de llegar a sus especificaciones de diseño.
La tabla siguiente muestra los niveles de traducción obtenidos para este
requerimiento.
Tabla 3 traducción del requerimiento "simpleza de armado"
Requerimiento del cliente
Traducción del requerimiento en términos mesurables Unidad de medida
Simplicidad de armado
Adiestramiento necesario Horas Uso de herramientas especiales Cantidad
Número de partes Cantidad Tiempo de armado Horas
Una vez obtenidos las especificaciones de diseño se está en la posibilidad de
pasar a la última etapa del método: fijar las metas de diseño.
3.7 Establecimiento de metas de diseño
Ya conocidos los requerimientos y características que se desea tenga el diseño
del motor, se puede conformar una matriz de QFD, que muestra la relación que
existe entre ellos.
Se utilizo la siguiente nomenclatura para expresar el grado de relación entre
requerimientos y características.
9 = fuerte relación
3 = mediana relación
1 = poca relación
En blanco = ninguna relación

28

29
CAPÍTULO IV DESCRIPCIÓN DE MODELADO
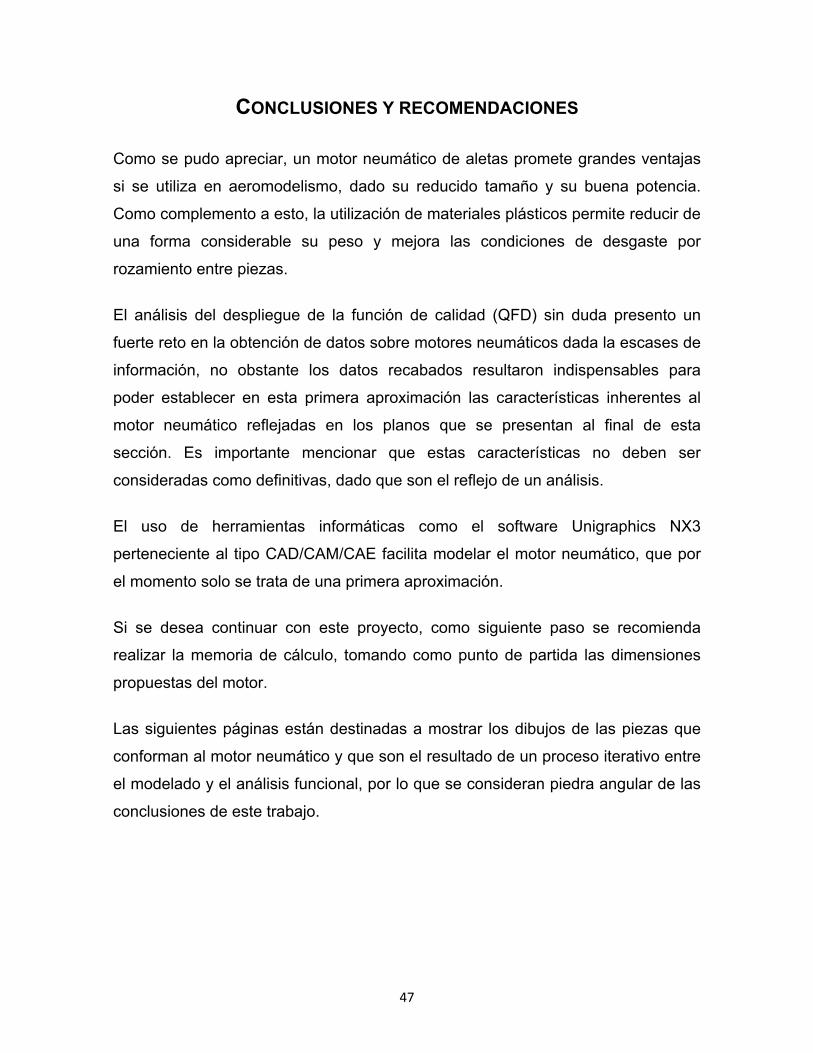
4.1 Trazado del rotor.
Este es el elemento principal del sistema alrededor del cual se desarrollará el resto
de los componentes del motor.
El primer paso a realizar, es definir el tamaño del cilindro sobre el cual se partirá
para delimitar el rotor, ver figura 4.1.1.
Figura 4.1.1
Se delinea una cavidad circular sobre una de las caras circulares del cilindro ver
figura 4.1.2
Figura 4.1.2

30
En la cara circular contraria se traza una cavidad rectangular que alojará una aleta
y se copia alrededor del centro del cilindro un número de veces igual al de las
aletas que tendrá el motor, teniendo cuidado de no dejar que las cavidades
atraviesen el cilindro, para poder formar una superficie donde se apoyaran las
aletas, ver figura 4.1.3.
Figura 4.1.3
Se redondean las aristas internas de la cavidad, con un radio igual a la mitad del
ancho del rectángulo que se utilizó para formar la cavidad y una de las aristas
exteriores con un radio inferior, ver figura 4.1.4.
Figura 4.1.4
31
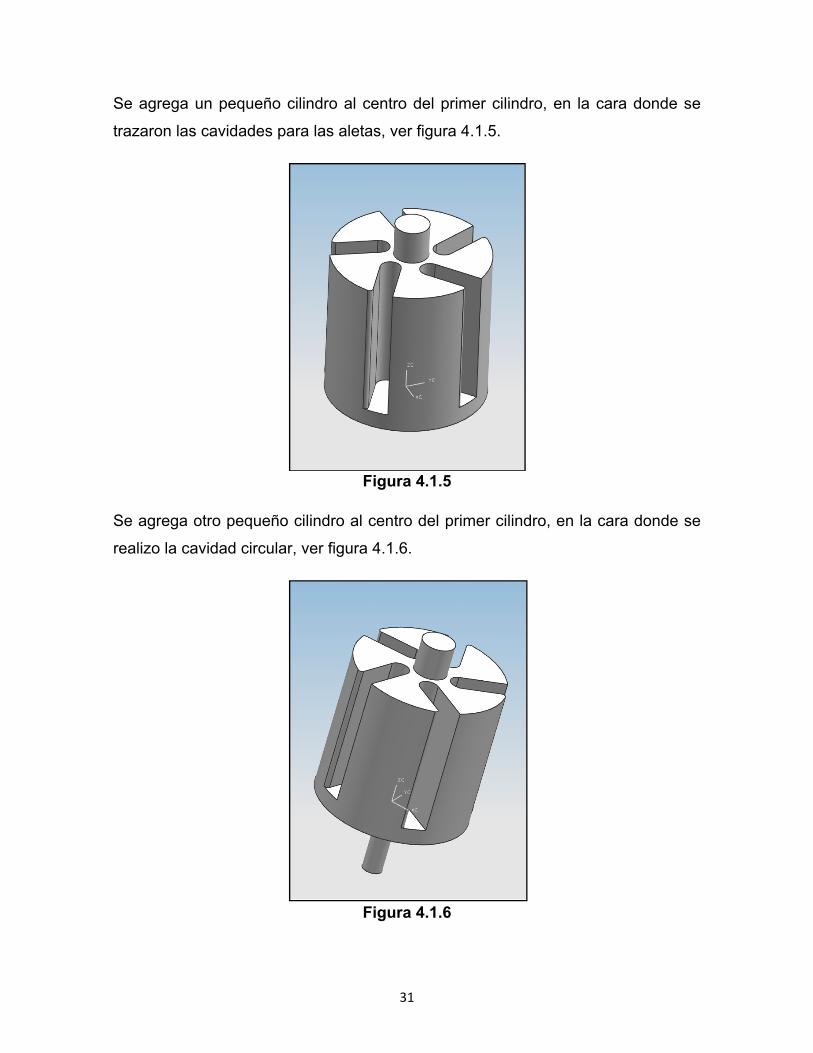
Se agrega un pequeño cilindro al centro del primer cilindro, en la cara donde se
trazaron las cavidades para las aletas, ver figura 4.1.5.
Figura 4.1.5
Se agrega otro pequeño cilindro al centro del primer cilindro, en la cara donde se
realizo la cavidad circular, ver figura 4.1.6.
Figura 4.1.6

32
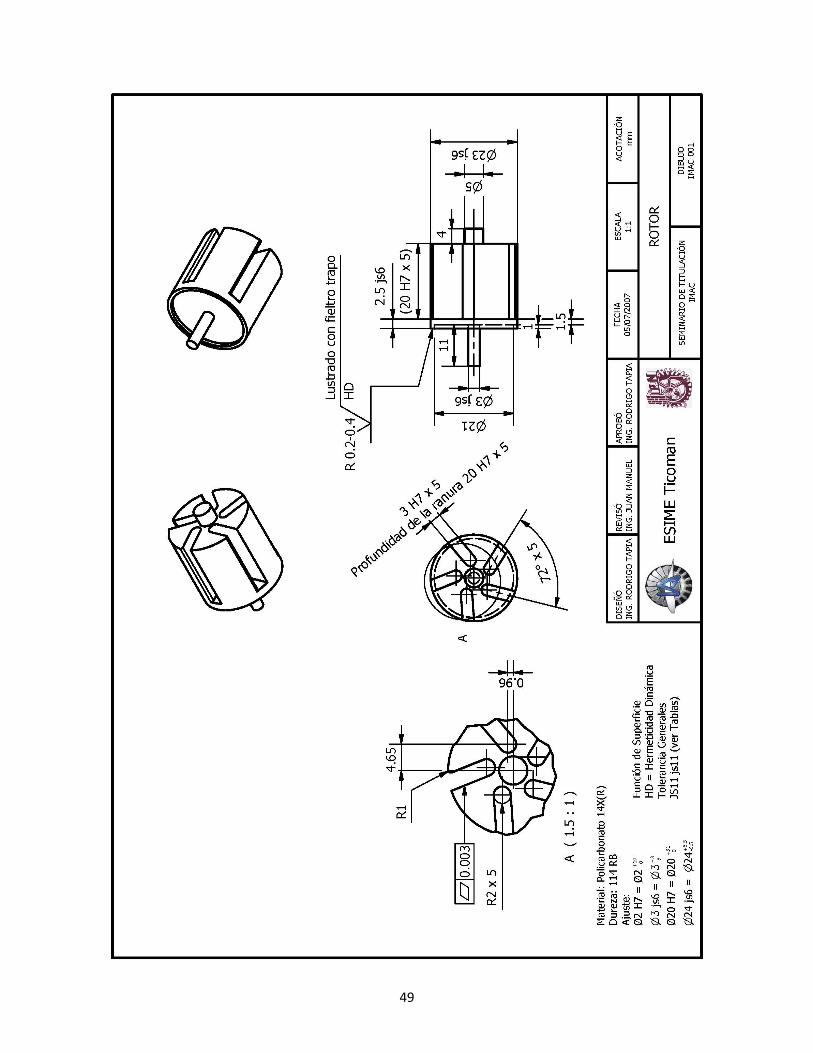
4.2 Trazado de la carcasa.
Esta pieza en conjunto con la tapa, es responsable de mantener la cohesión del
sistema. Es importante que tenga una forma solida y resistente a los golpes.
Su dibujo comienza delineando la forma de la cavidad que alojará al rotor y las
aletas. Se inicia con dos semicírculos unidos por dos líneas paralelas, a
continuación se traza alrededor de ella la forma exterior deseada de la carcasa,
que en este caso básicamente es un círculo con dos pestañas cuyo propósito es
incrementar el espesor en un área critica. El resultado es obtener un delineado
como el que se muestra en la figura 4.2.1.
Figura 4.2.1
Se extruye el área conformada por las curvas a una distancia igual a la de la
longitud de las aletas mas el espesor de la sección pequeña de la tapa, tal como
se muestra en la figura 4.2.2.
Figura 4.2.2
33
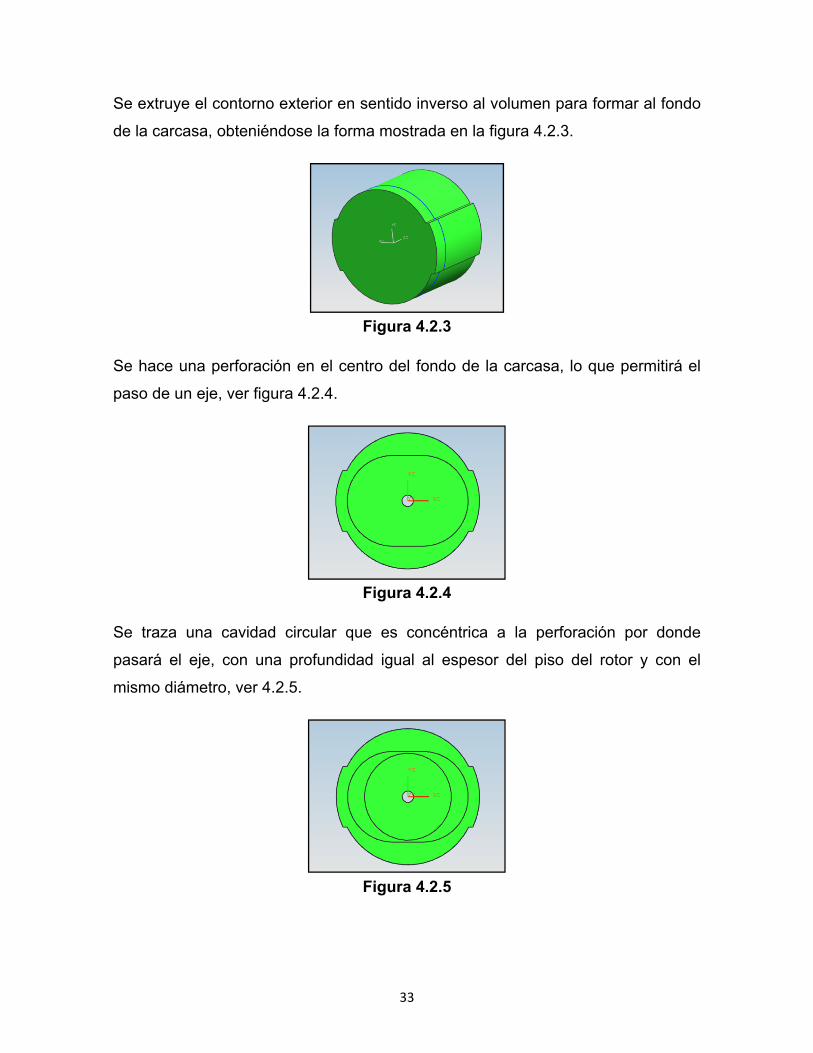
Se extruye el contorno exterior en sentido inverso al volumen para formar al fondo
de la carcasa, obteniéndose la forma mostrada en la figura 4.2.3.
Figura 4.2.3
Se hace una perforación en el centro del fondo de la carcasa, lo que permitirá el
paso de un eje, ver figura 4.2.4.
Figura 4.2.4
Se traza una cavidad circular que es concéntrica a la perforación por donde
pasará el eje, con una profundidad igual al espesor del piso del rotor y con el
mismo diámetro, ver 4.2.5.
Figura 4.2.5

34
Por último, sobre la cara superior de la carcasa y con referencia a su centro, se
crea una forma de un cono como se muestra en la figura 4.2.6 y 4.2.7.
Posteriormente se extruye y substrae, obteniendo así la carcasa que para estar
totalmente terminada necesita perforaciones para tornillería, ver figura 4.2.8.
Figura 4.2.6 Figura 4.2.7
Figura 4.2.8
4.3 Trazado de aleta
Esta pieza es la responsable de transformar la presión del aire en movimiento
mecánico dentro de las cámaras.
35
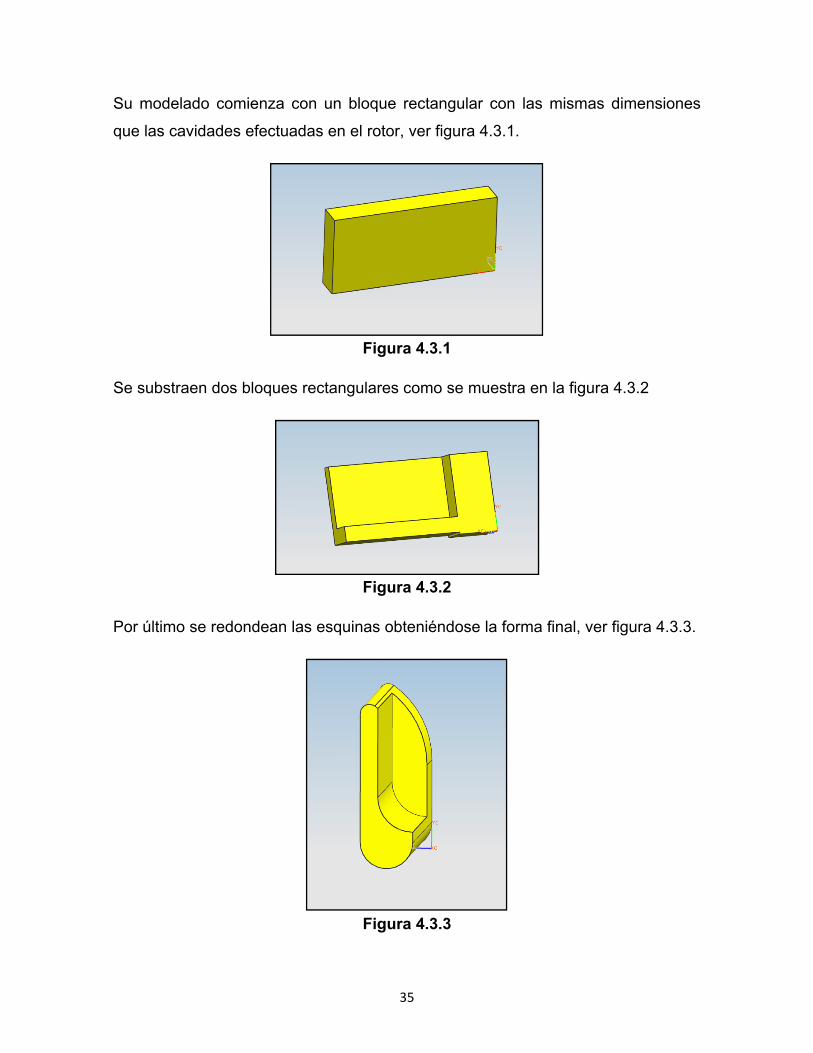
Su modelado comienza con un bloque rectangular con las mismas dimensiones
que las cavidades efectuadas en el rotor, ver figura 4.3.1.
Figura 4.3.1
Se substraen dos bloques rectangulares como se muestra en la figura 4.3.2
Figura 4.3.2
Por último se redondean las esquinas obteniéndose la forma final, ver figura 4.3.3.
Figura 4.3.3

36
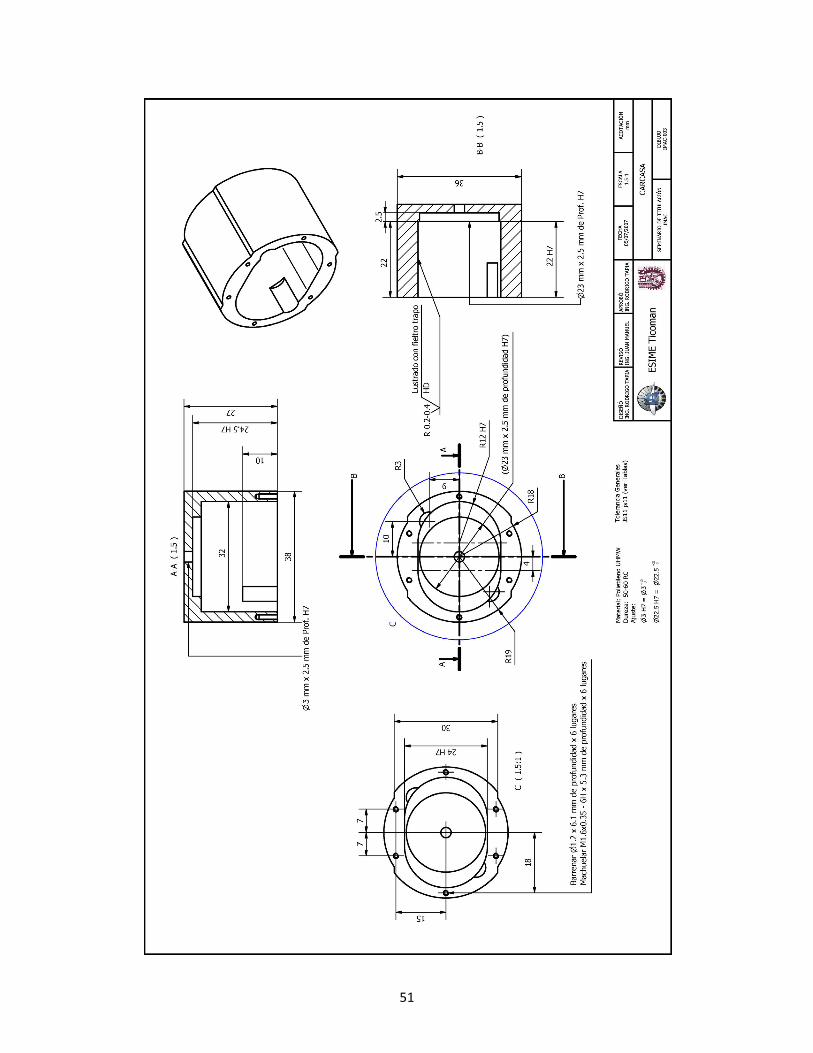
4.4 Trazado de tapa
Para comenzar el trazo de esta pieza se parte del mismo dibujo que se utilizo para
el trazado de la carcasa (ver figura 4.2.2). Se extruye el contorno exterior y
después el contorno interior en sentido contrario, ver figura 4.4.1.
Figura 4.4.1
Se trazan dos cavidades circulares concéntricas, tal como se muestra en la figura
4.4.2
Figura 4.4.2
A continuación se trazan dos círculos concéntricos sobre la superficie de la
cavidad mayor, ver figura 4.4.3.

37
Figura 4.4.3
Se extruye el área formada por los círculos, ver figura 4.4.4
Figura 4.4.4
Se trazan dos rectángulos sobre la superficie de la cavidad en forma de aro como
se muestra en la figura 4.4.5.
Figura 4.4.5
38
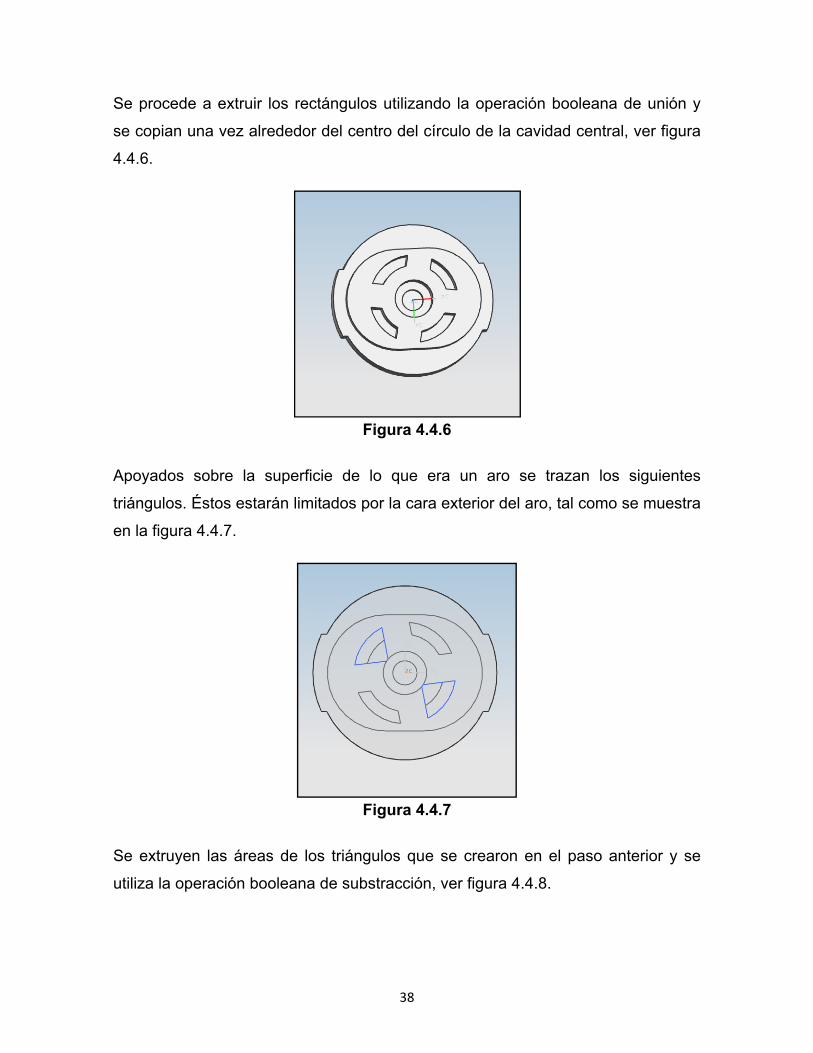
Se procede a extruir los rectángulos utilizando la operación booleana de unión y
se copian una vez alrededor del centro del círculo de la cavidad central, ver figura
4.4.6.
Figura 4.4.6
Apoyados sobre la superficie de lo que era un aro se trazan los siguientes
triángulos. Éstos estarán limitados por la cara exterior del aro, tal como se muestra
en la figura 4.4.7.
Figura 4.4.7
Se extruyen las áreas de los triángulos que se crearon en el paso anterior y se
utiliza la operación booleana de substracción, ver figura 4.4.8.

39
Figura 4.4.8
Se redondean las aristas resultantes de la operación anterior, ver figura 4.4.9
Figura 4.4.9
Se realizan las perforaciones que servirán para la admisión y escape del aire, ver
figura 4.4.10.
Figura 4.4.10
Para terminar con el trazo de la tapa, se realizarán perforaciones para tornillería,
colocadas diversos puntos y distribuidas uniformemente, ver figura 4.4.11.

40
Figura 4.4.11
4.5 Trazado de la bancada.
Esta pieza no es un elemento crítico del sistema, por lo que no se profundizará
mucho en la descripción de su diseño. Basta con mencionar que su función, como
su nombre lo indica, es sujetar el motor; pero es importante cuidar que no
interfiera con los orificios de admisión y expulsión del aire.
Tomando en cuenta lo anterior, el bancada de sujeción tendrá una forma como la
que se muestra en la figura 4.5.1.
Figura 4.5.1
4.6 Ensamble del sistema.
Para realizar el ensamble del sistema, se tomó al rotor como el eje de
construcción del motor, por lo que es la primera pieza a insertar (ver figura 4.6.1)

41
Figura 4.6.1
Posterior a esta acción, se insertan las aletas, tomando como referencia la
superficie donde se apoyaran las aletas en el roto (ver figura 4.6.2)
Figura 4.6.2
Y alguna de las paredes que la sostendrán (ver figura 4.6.3)
Figura 4.6.3
La aleta insertada quedara de la siguiente manera (ver figura 4.6.4)

42
Figura 4.6.4
Los pasos para la inserción de la aleta se debe de repetir el número de veces
necesario para la cantidad de aletas que posea el motor (ver figura 4.6.5)
Figura 4.6.5
A continuación se inserta la carcasa; el eje del rotor estará centrado con el orificio
de la carcasa que se diseño para tal fin (ver figura 4.6.6)
Figura 4.6.6
Y estará asentada con respecto a la base del rotor (ver figura 4.6.7)
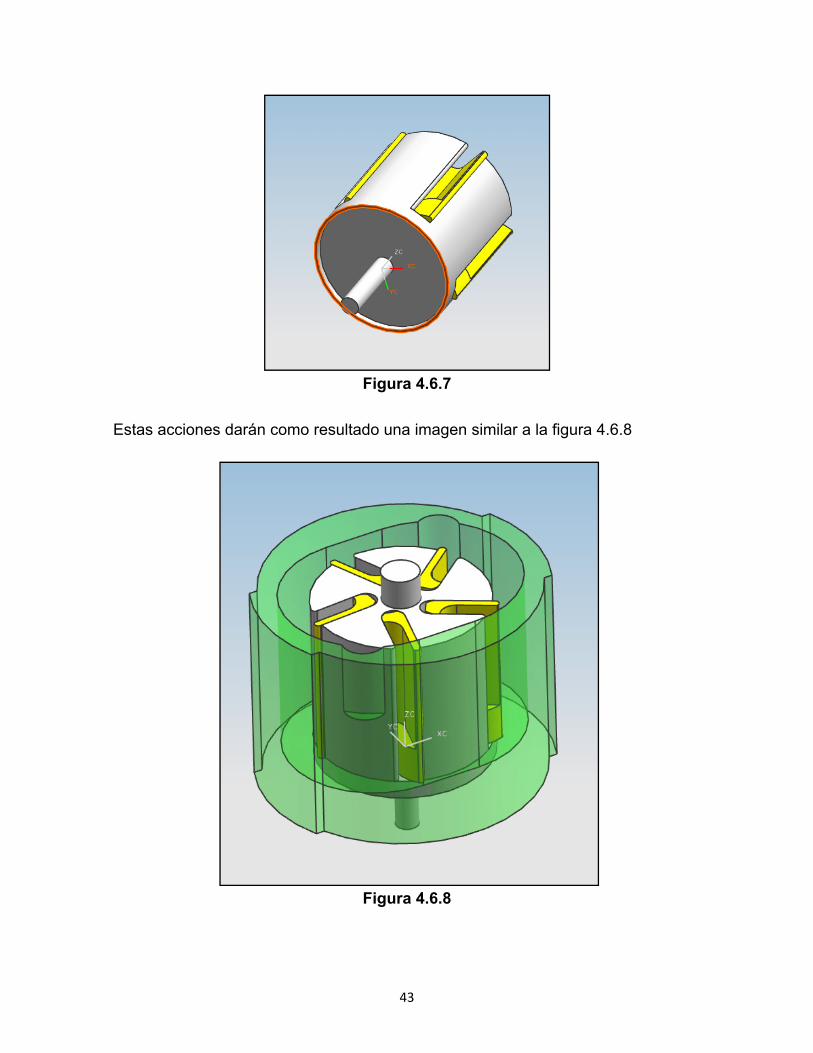
43
Figura 4.6.7
Estas acciones darán como resultado una imagen similar a la figura 4.6.8
Figura 4.6.8

44
Por último se procede a insertar la tapa del motor, que tendrá como limites la parte
superior de la carcasa como se muestra en la figura 4.6.9
Figura 4.6.9
Y dos de sus caras circulares como se muestra en las figuras 4.6.10 y 4.6.11
Figura 4.6.10 Figura 4.6.11
El ensamble terminado se verá como la figura 4.6.12
Figura 4.6.12

45
4.7 Selección de materiales para las piezas.
A continuación se sugieren los materiales necesarios para la construcción de las
piezas del motor, estableciendo en primer lugar, las condiciones bajo las cuales
trabajará la pieza.
4.7.1 Material para rotor
Este componente del motor estará sujeto a fricción intensa en secciones aisladas,
además estará bajo un esfuerzo constante generado por las altas revoluciones a
las que estará sometido.
Un material que trabaja bien bajo esas condiciones es el policarbonato, este
presenta una mayor resistencia a la deformación que otros plásticos además de
poseer un bajo coeficiente de fricción, ver anexo 3.
4.7.2 Material para carcasa
Este componente del motor estará sujeto a fricción intensa y bajo un esfuerzo
constante en gran parte de sus caras interiores.
Para conseguir un buen desempeño de esta pieza se recomienda construirla con
poliuretano de tipo UHMW, ya que de soporta fácilmente grandes esfuerzos como
se muestra en el anexo 3.
4.7.3. Material para aleta
Este componente del motor estará sujeto a fricción intensa en casi toda su
superficie además de sufrir los efectos de las fuerzas centrifugas que actúan sobre
ella y una constante vibración.
Se recomienda construir esta pieza con poliuretano UHMW, ya que como se
aprecia en puntos anteriores, posee excelentes características para trabajar bajo
las condiciones a las que estará sometida.

46
4.7.4 Material para tapa
El diseño de la tapa está pensado para reducir en medida de lo posible, la fricción
que genera su contacto con el rotor y las aletas, además no tiene que soportar
grades esfuerzos, por lo que se recomienda construirla con politetrafluoretileno
(ver características física en el anexo 3)
47
CONCLUSIONES Y RECOMENDACIONES
Como se pudo apreciar, un motor neumático de aletas promete grandes ventajas
si se utiliza en aeromodelismo, dado su reducido tamaño y su buena potencia.
Como complemento a esto, la utilización de materiales plásticos permite reducir de
una forma considerable su peso y mejora las condiciones de desgaste por
rozamiento entre piezas.
El análisis del despliegue de la función de calidad (QFD) sin duda presento un
fuerte reto en la obtención de datos sobre motores neumáticos dada la escases de
información, no obstante los datos recabados resultaron indispensables para
poder establecer en esta primera aproximación las características inherentes al
motor neumático reflejadas en los planos que se presentan al final de esta
sección. Es importante mencionar que estas características no deben ser
consideradas como definitivas, dado que son el reflejo de un análisis.
El uso de herramientas informáticas como el software Unigraphics NX3
perteneciente al tipo CAD/CAM/CAE facilita modelar el motor neumático, que por
el momento solo se trata de una primera aproximación.
Si se desea continuar con este proyecto, como siguiente paso se recomienda
realizar la memoria de cálculo, tomando como punto de partida las dimensiones
propuestas del motor.
Las siguientes páginas están destinadas a mostrar los dibujos de las piezas que
conforman al motor neumático y que son el resultado de un proceso iterativo entre
el modelado y el análisis funcional, por lo que se consideran piedra angular de las
conclusiones de este trabajo.

48
49

50
51
52

53
Diá
met
ros
en m
m
>315
a
400
±180
±285
±445
IT d
e la
tabl
a en
mic
ras
Tabl
a 5
Tole
ranc
ia g
ener
ales
>250
a
315
±160
±260
±405
> 18
0 a
250
±145
±230
±360
>120
a
180
±125
±200
±315
>80
a 12
0
±110
±175
±270
>50
a 8
0
±95
±150
±230
>30
a 50
±80
±125
±195
>18
a 30
±65
±105
±165
> 10
a 1
8
±55
±90
±135
> 6
a 10
±45
±75
±110
>3 a
5
±37
±60
±90
≤ 3
±30
±50
±70
JS 1
1
y
js11
JS 1
2
y
js12
JS 1
3
y
js13

54
Anexo 1
Motor de combustión interna empleado en el despliegue de la función de calidad
(Capítulo III).
ENYA SS15ABC-BB (2,5 cc)
Tipo Motor mono pistón de combustión interna.
Peso 165 g
Potencia 0.50 hp / 17000 RPM
Hélices 8x6 – 8x5
Desplazamiento 2.5 cc

55
Anexo 2
Motores neumáticos empleados en el despliegue de la función de calidad
(Capítulo III).
OBER LGSHR
Tipo Motor neumático
Peso 750-900 g
Potencia 0.53 hp / 11500 RPM
Par a Pmáx 0.33 Nm
Velocidad en vacío 21000 RPM
Tabla 4 Graficas de Par y Potencia

56
IR M004RHR000AR3
Tipo Motor neumático
Peso 950 g
Potencia 0.50 hp / 10000 RPM
Par a Pmáx 0.72 Nm
Velocidad en vacío 18000 RPM

57
Desoutter HM-4600
Tipo Motor neumático
Peso 1088 g
Potencia 0.60 hp / 2504 RPM
Par a Pmáx 3.023 Nm
Velocidad en vacío 4600 RPM
58
Anexo 3
Características físicas de los materiales propuestos para la fabricación de las
piezas del motor.
Policarbonato
• Buena resistencia al impacto.
• Buena resistencia a la temperatura
• Buena estabilidad dimensional
• Escasa combustibilidad
• Buenas propiedades mecánicas
• No es biodegradable
• Tiene una densidad de 1.18 a 1.23 gr/cm3
Polietileno UHMW
• Posee buenas características de desgaste y abrasión.
• Bajo coeficiente rozamiento
• Elevada resistencia al impacto
• Moderada resistencia mecaniza, a la fluencia y rigidez
• Gran facilidad de mecanización
• No auto extinguible
• Tiene una densidad de 0.87 a 0.95 gr/cm3
Politetrafluoretileno (Teflón)
• Buenas propiedades de tensión y compresión.
• Resistencia a impactos.
• Memoria plástica.
• Posee el más bajo coeficiente de fricción de todos los materiales sólidos.
• Tiene una densidad de 2.13 A 2.21 gr/cm3
59
BIBLIOGRAFÍA
Villanueva P. y R. Watanave, (2005). Manual de métodos de fabricación
metalmecánica. Quinta edición, México, Editorial A.G.T. Editor, S.A.
Roldán, José (2006). Neumática, hidráulica y electricidad aplicada. Primera
edición, España, Editorial Paraninfo.
Guillén, Antonio (1993). Introducción a la neumática. España, Editorial
MARCOMBO, S.A.
Pradeep P. y R. Askeland (2004). Essentials of Materials Science and
Engineering. Edición a cargo de Nelson, división de Thompson Canadá. Impreso
en EUA.
Cosmo (2007). “¿Qué es el CAD? V.1” en COSMOCAX, disponible en:
http://cadcamcae.wordpress.com/2007/04/13/%C2%BFque-es-el-cad-v1/ [Visitado
el día 23 de Junio de 2007]
Argote Vea-Murguía, José Ignacio (2001). “Una breve historia del CAD:
Antecedentes y evolución.” en Diseño asistido por ordenador, disponible en:
http://personal.telefonica.terra.es/web/cad/historia.htm [Visitado el día 23 de Junio
de 2007]
Peris Broch, Juan Carlos (2001). “Introducción al CAD/CAM” en Llenguatges i
Sistemes Informàtics – Departament. Universitat Jaume I, disponible en:
http://www3.uji.es/~jperis/dfao/apuntes/tema1.pdf [Visitado el día 24 de Junio de
2007]
Moreno, José Antonio (2001) “Principios de hidráulica y neumática” en
Orientaline.net, disponible en: http://www.orientaline.net/tecno/apuntes9.pdf
[Visitado el día 30 de Junio de 2007]
Verdur , Gustavo A., Mercuri, Luis R. y Morán, Oscar D.(2005) ” Análisis de un
motor rotativo original propulsado con aire comprimido” en Universidad Nacional

60
de San Luis – Facultad de Ingeniería y Ciencias Económico Sociales”, disponible
en: http://www.fices.unsl.edu.ar/ [Visitada el día 3 de Junio de 2007]
Neumac, S.A. (2004) “Motores neumáticos: Características Generales” en
neumática.es, disponible en:
http://www.neumac.es/storage/pdf/113/MOTORES%20NEUMATICOS_FOLLETO
%20GENERAL%20Rev0105.pdf [Visitado el día 30 de Junio de 2007]
Atlas Copco (2005) “Guía de bolsillo motores neumáticos” en atlascopco.com,
disponible en: http://www-
1.atlascopco.com/Websites/TOOLS/Products/Attachment.nsf/vLookupPDF/37d3bf
6dbefde4b0c1257178003e2817/$FILE/P-guide_Air_motors_Spanish.pdf [visitada
el día 28 de Junio de 2007]
Universidad de Cantabria (2006) “T 12.- Actuadores neumáticos” en DIEE,
Universidad de Cantabria, disponible en:
http://www.diee.unican.es/Neum%C3%A1tica/T12%20CILINDROS.pdf [visitada el
día 28 de Junio de 2007]
Sapiensman (2004) “Neumática: conceptos básicos aplicaciones” en
Sapiensman.com, disponible en http://www.sapiensman.com/neumatica/index.htm
[Visitada el día 01 de Julio de 2007]
Oscar Javier, Herrera Melo (2007) “Neumática e hidráulica” monografías.com,
disponible en http://www.monografias.com/trabajos-pdf/neumatica-
hidraulica/neumatica-hidraulica.pdf [Visitada el día 5 de Julio del 2007]
Juan Manuel, Díaz Salcedo (2007) Despliegue de Funciones de calidad. Apuntes
del seminario Ingeniería y Manufactura Asistida por Computadora (IMAC). Instituto
Politécnico Nacional – ESIME Ticomán.
Goodfellow, (2002) “Polietileno - U.H.M.W. (UHMW PE ) - Información de
Materia”l, disponible en
http://www.goodfellow.com/csp/active/STATIC/S/Polietileno_-_UHMW.HTML
[Visitada el día 05 de Julio de 2007]

61
GE Plastics, (2005) “LEXAN –RESINA DE POLICARBONATO” disponible en
http://www.geplastics.com.ar/resinsar/resins/materials/lexan.html#tabelas [Visitada
el día 05 de Julio de 2007]
Desoutter (2002) “Air motors” en desouttertools.com, disponible en:
http://www.desouttertools.com/PDF/Air-motors.pdf [visitada el día 06 de Julio de
2007]
Ingersoll-Rand (2003) “ARO Pneumatic motors” en irtools.com, disponible en:
http://www.irtools.com/ir_pdfs/Air%20Motors/Air%20Motors/Motor%20Brochures/5
2476-AT.PDF [visitada el día 06 de Julio de 2007]







