
Universidade Federal de Goiás
Escola de Engenharia Elétrica
Coordenação de Estágios e Projeto Final
Projeto Final
Levitação Magnética de uma Esfera Metálica
Usando Controle Eletrônico em Malha Fechada
Allysson Gontijo de Mesquita
Edgar Martins Moura Maia
Orientador: Prof. José Wilson Lima Nerys, PhD.
Goiânia,
novembro de 2000.

Universidade Federal de Goiás
Escola de Engenharia Elétrica
Coordenação de Estágios e Projeto Final
Projeto Final
Levitação Magnética de uma Esfera Metálica
Usando Controle Eletrônico em Malha Fechada
Allysson Gontijo de Mesquita
Edgar Martins Moura Maia
Orientador: Prof. José Wilson Lima Nerys, PhD.
Goiânia,
novembro de 2000.

”Perguntou o homem de DEUS: Onde caiu?
Mostrou-lhe ele o lugar. Então Eliseu cortou um
pau, lançou-o ali, fez flutuar o ferro, e disse:
Levanta-o.”
(Segundo Livro dos Reis, 6: 6-7)
A DEUS PAI, que nos ama imensamente, por
intermédio de Seu Unigênito.

Aos professores e funcionários da Universidade
Federal de Goiás que, direta ou indiretamente,
colaboraram na composição deste trabalho;
principalmente ao orientador deste, pelo seu
valoroso empenho e participação.

Sumário
364.4. O Controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
364.3. A Planta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
344.2. A Esfera e seu Movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
324.1. A Fonte de Força Magnética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
324. Análise Computacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
243.5. Modelamento Matemático da Planta . . . . . . . . . . . . . . . . . . . . . . . . . . . .
233.4. A Característica Força-Corrente-Distância . . . . . . . . . . . . . . . . . . . . . . .
213.3. A Localização do Objeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
213.2. A Esfera Metálica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
193.1. Criação da Fonte de Campo Magnético . . . . . . . . . . . . . . . . . . . . . . . . . .
193. O Projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
172.4. O Interfaceamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
112.3. O Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52.2. A Força Magnética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32.1. O Campo Magnético . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32. Conceituação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11. Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ivResumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vLista de Abreviaturas e Símbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iiiLista de Ilustrações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i

71Índice Remissivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70Referências Bibliográficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67Apêndice I. Arquivo de Comandos para Traçar Algumas Curvas - fd_c.m .
65Apêndice H. Arquivo de Comandos para Relacionar os Dados
Experimentais com uma Função Matemática - equation.m . .
63Apêndice G. Arquivo de Dados para Análise Computacional - data_lev.m
61Apêndice F. Lista de Componentes Utilizados na Confecção do Circuito. .
60Apêndice E. Diagrama Elétrico da Alimentação . . . . . . . . . . . . . . . . . . . . . . .
59Apêndice D. Diagrama Elétrico do Acionamento e Potência . . . . . . . . . . . .
58Apêndice C. Diagrama Elétrico do Comparador Operando com Histerese
57Apêndice B. Diagrama Elétrico do Somador / Controlador Proporcional . .
56Apêndice A. Diagrama Elétrico do Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . .
546. Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
445.1. Do Descontrole ao Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
445. Resultados Experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
394.7. A Estabilidade Computacionalmente Conseguida . . . . . . . . . . . . . . . . .
384.6. O Sistema Completo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
374.5. O Interfaceamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii

Lista de Ilustrações
41Simulação do comportamento da esfera, quanto à posição.Fig. 4.8:
40As curvas traçadas pelo bloco Scope, do Simulink.Fig. 4.7:
38O sistema em malha fechada.Fig. 4.6:
37O controlador proporcional-integral-derivativo, com restriçõesde saída.Fig. 4.5:
36O objeto do controle - a planta.Fig. 4.4:
35A tradução em blocos do movimento da esfera.Fig. 4.3:
34A fonte de força magnética completa.Fig. 4.2:
33A fonte de força magnética, segundo o equacionamentodefinido.Fig. 4.1:
31As curvas de modelamento força x corrente, para váriasdistâncias.Fig. 3.6:
30A curva b(I), para uma faixa de valores de corrente.Fig. 3.5:
29Alguns dos dados experimentais defronte à aproximação pelaEq. (2.27).Fig. 3.4:
28A Tab. 3.2, retirada a massa da esfera, traçada em gráfico.Fig. 3.3:
26Os valores de "massa" da esfera (gramas) quando a umadistância d da fonte de campo magnético, estando estaalimentada com uma corrente I.
Tab. 3.2:
23Configuração usada para determinar o comportamento da forçamagnética.Fig. 3.2:
22Acoplamento do sinal do sensor de luminosidade.Fig. 3.1:
20Características magnéticas de alguns materiais industrialmentecomuns.Tab. 3.1:
18Diagrama de blocos de um interfaceamento de potência.Fig. 2.4:
16Amplificador operacional operando como comparador comhisterese.Fig. 2.3:
14Amplificadores operacionais formando um controlador PID.Fig. 2.2:
8Ciclo de histerese de uma lâmina de 2mm de DeltamaxFig. 2.1:
2Exemplo de aplicação do eletromagnetismo - a levitaçãomagnética.Fig. 1.1:
iii
61Lista de componentes necessários.Tab. F1:
60Circuito usado para energizar os sistemas de potência,comando, controle e detecção.Fig. E1:
59Circuito usado para comandar a corrente da bobina.Fig. D1:
58Circuito usado no controle por histerese.Fig. C1:
57Circuito que compõe o somador (erro de posição) e controladorproporcional.Fig. B1:
56Circuito usado no sensor de posicionamento.Fig. A1:
53A montagem final setorizada (Vista superior-frontal).Fig. 5.8:
52O circuito montado em placa: Vista superior-frontal, e; Vistasuperior lateral, respectivamente.Fig. 5.7:
51Demonstração com outros objetos ferromagnéticos: (a) Duasesferas simultaneamente; (b) Um núcleo de ferro laminado.Fig. 5.6:
50Panorama da área de experimentos.Fig. 5.5:
50Sucesso no equilíbrio da esfera em posição determinada.Fig. 5.4:
48Configuração do sistema manipulador de corrente da fonte decampo magnético (L1).Fig. 5.3:
47O diagrama do sistema completo usado.Fig. 5.2:
45Estrutura Experimental para Levitação Magnética.Fig. 5.1:
43A corrente na bobina, para os valores de controle dados.Fig. 4.11:
42Ampliação na região de oscilação mais preponderante.Fig. 4.10:
42A tensão necessária para suspender e estabilizar a esfera.Fig. 4.9:
iv

Lista de Abreviaturas e Símbolos
confer (compare)cf.
circa (cerca de)c.
id est (isto é)i.e.
ObservaçãoObs.
EquaçãoEq.
TabelaTab.
FiguraFig.
v
Resumo
Percebe-se um desejo cada vez mais intenso de desenvolver formas de
controlar posicionamento e deslocamento com o mínimo contato físico entre partes
controladas e controladoras, objetivando minimização de desgastes, redução de
manutenção, aumento de velocidade, ampliação da mobilidade, preservação de
estados físico-químicos e melhor aproveitamento da energia. Este desejo pôde
encontrar a porta do sonho para a realidade através da manipulação dos eventos
característicos de uma ferramenta extremamente complexa - o eletromagnetismo.
Atualmente, o uso desta ferramenta possibilitou desde o 'simples' movimento de
veículos sem contato físico com o solo, até o seguro confinamento magnético de
matéria em temperaturas solares (plasmas de deutério e trítio) para produção de
energia. Aqui, usufruindo de um sistema simples de controle análogico, geração de
campo magnético e localização espacial, esta ferramenta encontra utilidade no
posicionamento unidimensional de vários objetos, de características
ferromagnéticas, equilibrados por forças peso e magnética.

1. Introdução
Os efeitos do campo magnético são conhecidos desde épocas muito antigas,
quando os efeitos do imã permanente, encontrado em forma natural - a magnetita
(Fe3O4), foram observados pela primeira vez. A descoberta do campo magnético
terrestre teve enorme influência na orientação do homem. Entretanto, só no começo
do século XIX, Oersted1 descobriu que uma corrente elétrica produzia um campo
magnético. Juntamente com os trabalhos posteriores de Gauss, Henry2, Faraday3 e
outros, o campo magnético foi projetado em associação com o campo elétrico. Os
esforços dos homens que dedicaram-se a estes tipos de experimentos e estudos
tiveram como resultado o desenvolvimento da maquinaria elétrica, equipamentos de
comunicação e computadores, responsáveis pelos fenômenos magnéticos que
desempenham importante papel em nossa vida diariamente [1].
Tecnicamente, um corpo colocado sobre outro está levitando a uma distância
microscópica, devido às forças eletromagnéticas intermoleculares. Mas isto não é
conhecido por levitação, por causa das pequenas dimensões envolvidas nos efeitos
quânticos. No que relaciona-se com distâncias úteis aos processos humanos, o
progresso da tecnologia aumentou as possibilidades de uso do campo magnético.
Através do emprego do conceito de realimentação4, é possível utilizar-se da força
magnética para reduzir o atrito na movimentação de corpos, pela levitação dos
1
4 A teoria da realimentação negativa foi desenvolvida por Harold S. Black em 1927, enquantotrabalhava no Bell Laboratories, nos E.U.A. [6].
3 Michael Faraday (1791-1867), Físico e químico inglês, descobriu o fenômeno da induçãoelétrica, o diamagnetismo e as leis da eletrólise. Foi diretor da Royal Society de Londres em1837.
2 Joseph Henry (1797-1878), Físico inglês, descobriu a auto-indução e construiu o primeirotelégrafo eletromagnético.
1 Hans Christian Oersted (1777-1851), Físico dinamarquês, precursor da pilha elétrica e doeletromagnetismo.
mesmos. Estes princípios já são utilizados para transporte, em veículos
denominados por MagLev (vide Fig. 1.1). Apesar disso, ainda é discutível o
rendimento de tais máquinas, pois caracterizam-se por elevado consumo de energia
e baixa relação entre sua capacidade de transporte e sua massa própria.
Provavelmente, o desenvolvimento de materiais supercondutores à temperatura
ambiente possibilitará uma utilização em muito maior escala do campo magnético.
Fig. 1.1: Exemplo de aplicação do eletromagnetismo - a levitação magnética.
Este trabalho tem esta finalidade - a de manter um objeto, no caso, uma
esfera ferromagnética, suspenso somente através do equilíbrio entre força
magnética e gravitacional, numa posição estável, utilizando um controle analógico
retroalimentado. Sendo a interação do campo magnético com os corpos muito
complexa, extremamente dependente de suas características, este trabalho
mostra-se bem empírico, porém embasado nos conceitos e definições já existentes.
Aqui, é aproveitado o relacionamento entre corrente elétrica e campo magnético,
além das propriedades dos materiais ferromagnéticos.
2
2. Conceituação
Para que este trabalho possa materializar-se de maneira científica, vários
conceitos devem ser colocados de forma bastante evidente. Portanto, estes serão
explanados a seguir.
2.1. O Campo Magnético
A fonte de um campo magnético estacionário pode ser um ímã permanente,
um campo elétrico variando linearmente no tempo ou uma corrente elétrica contínua
[4]. As duas primeiras formas não encontram utilidade neste trabalho. Enfocaremos,
portanto, somente a última.
A Lei de Biot-Savart5 estabelece que, num condutor filamentar6, a corrente, I,
que flui em um vetor elemento diferencial de comprimento do filamento, dl, produz
num ponto P um campo magnético de intensidade proporcional ao produto das
magnitudes da corrente, do comprimento diferencial e do seno do ângulo que
forma-se entre o elemento diferencial e a linha que o liga ao ponto P. É, também,
inversamente proporcional ao quadrado da distância, R, do elemento diferencial ao
ponto em questão.
Sendo aR o vetor unitário que tem a direção elemento diferencial-ponto P,
(2.1),dH = I.dl%aR4 R2
3
6 Um condutor filamentar é o caso limite para um condutor cilíndrico de seção reta circularcujo raio tende a zero.
5 Jean-Baptiste Biot (1774-1862) e Félix Savart eram colegas de André Marie Ampère(1775-1836) e os três foram professores de Física no Colégio de França na mesma época. Alei de Biot-Savart foi proposta em 1820.

A unidade da intensidade de campo magnético, H, no sistema MKS é dada
em ampère por metro, A/m. A Lei de Biot-Savart é ainda conhecida por Lei de
Ampère para o elemento de corrente.
Não se pode verificá-la experimentalmente da forma que apresenta-se.
Quando trata-se de uma corrente fluindo em um circuito fechado,
(2.2),H =“ I.dl%aR4 R2
pode-se verificar experimentalmente.
Derivada da Lei de Biot-Savart, a Lei Circuital de Ampère estabelece que a
integral de linha do campo magnético, H, em qualquer percurso fechado é
exatamente igual à corrente enlaçada pelo percurso,
(2.3),“ H $ dl = I
temos, assim, uma relação mais perceptível entre corrente elétrica e campo
magnético.
O relacionamento entre força e campo magnético é mais tratado através da
densidade de fluxo magnético, B, que no vácuo é dada por,
(2.4),B = 0H
e é medida em weber por metro quadrado, Wb/m2. O Sistema Internacional de
Unidades ainda adota o tesla, T. Uma unidade antiga é o gauss, onde 1Wb/m²
equivale a 10000 gauss. A constante µ0 é a permeabilidade magnética do vácuo7.
4
7 A permeabilidade magnética do vácuo é igual a 4π.10-7H/m.
Com a densidade de fluxo magnético, pode-se ter o fluxo magnético, Φ, em
weber, Wb, em uma determinada superfície,
(2.5),= ¶ B $ dS
Costuma-se referenciar a densidade de fluxo magnético, B, como campo
magnético. Este trabalho, portanto, seguirá esta notação.
Como o campo magnético, neste trabalho, será criado por uma corrente,
ainda é preciso entender como o fluxo magnético relaciona-se com a corrente. Num
circuito isolado, o fluxo magnético é dependente da corrente existente. Esta
dependência é traduzida pela indutância (medida em henry, H), que é definida como
a variação do fluxo magnético com a corrente,
(2.6),L = ddI
2.2. A Força Magnética
O trabalho teórico de Maxwell8 e outros mostrou que os campos magnético e
elétrico estão inextricavelmente entrelaçados [1]. Nesta linha, a força sobre uma
partícula em movimento com uma velocidade, v, devida a combinação dos campos
magnético e elétrico e dada pela equação da força de Lorentz9,
(2.7),F = q(E + v % B)
5
9 Antoon Hendrik Lorentz (1853-1928), Físico holandês, contribuiu para teoriaeletromagnética da luz e a formulação da teoria da relatividade. Nobel de 1902.
8 James Clerk Maxwell (1831-1879), Físico inglês, desenvolveu a teoria eletromagnética daluz.

Sabendo que a carga elétrica é o produto da densidade volumétrica de carga
pelo volume,
(2.8),dq = .dV
a densidade de corrente é a velocidade da densidade volumétrica de carga,
(2.9),J = .v
e que o produto da densidade de corrente e do elemento diferencial de volume pode
ser interpretado como um elemento diferencial de corrente,
(2.10),J.dV = I.dl
a força de Lorentz é perfeitamente aplicável a um filamento diferencial de corrente,
que integrada, da origem à formulação,
(2.11),F = −I “ B % dl
Com isso, basta entender os elétrons em órbita como pequeníssimas espiras
de corrente, que interagindo com um campo magnético externo, experimentarão
forças. Embora resultados quantitativos rigorosos possam somente ser preditos com
o uso da teoria quântica, este modelo provê uma teoria qualitativa satisfatória [4].
Nos materiais ferromagnéticos cada átomo tem um momento de dipolo
relativamente grande, causado principalmente por um momento eletrônico de spin10
6
10É necessário assimilar a teoria quântica para mostrar que um elétron pode ter um momentomagnético de spin igual a !9.10-24A.m2. O sinal indica que ele pode incrementar oudecrementar o campo externo. Somente os spins dos elétrons das camadas incompletascontribuem para o momento magnético do átomo.
não-compensado. Forças interatômicas obrigam estes momentos a se alinharem de
modo paralelo em regiões de densidade atômica maior. Estas regiões são
conhecidas por domínios11. Sob a aplicação de um campo externo, os domínios que
possuem momentos magnéticos com a mesma direção crescem em detrimento dos
demais. Assim, o campo interno cresce grandemente quando comparado ao
externo. Na remoção do campo externo, um campo de dipolo residual permanece na
estrutura macroscópica, e ela não terá as mesmas características magnéticas de
anteriormente. Este fato é denominado de histerese12. Tem-se, então, que a
permeabilidade magnética nesse tipo de material não é constante, pois cada
amplitude de campo magnético, H, ocasionará orientações de momentos
magnéticos, relacionando-se de modo diferente com a densidade de fluxo
magnético, B, no material. É perfeitamente visível que, quando os momentos
magnéticos se alinharem ao máximo possível com o campo externo, o material
estará saturado [3]. Assim, o campo magnético pode continuar crescendo, mas a
densidade de fluxo magnético mantém-se constante.
Variando-se o campo magnético externo ao material estudado, tanto em
amplitude (nula até a saturação) quanto em sentido, e medindo a densidade de fluxo
7
12Ao retardamento do efeito de um fenômeno físico sobre um corpo dá-se o nome de histerese(do grego, hystéresis, i.e., o que está atrasado).
11Os domínios têm em torno de 10-2 a 10-5cm de tamanho.

magnético, levanta-se uma característica muito importante - o ciclo de histerese. A
Fig. 2.1 mostra o resultado do levantamento deste ciclo para um material industrial.
Fig. 2.1: Ciclo de histerese de uma lâmina de 2mm de Deltamax13.
A área dentro do ciclo está relacionada com a energia requerida para inverter
as paredes dos domínios magnéticos quando se inverte o campo magnético. É uma
energia irreversível e traduz-se em perdas de energia conhecidas como perdas por
histerese. Esta área é dependente da temperatura e freqüência de inversões do
campo magnético [3].
As linhas de fluxo magnético experimentam dificuldades diferentes para se
formarem nos materiais. Esta dificuldade é interpretada por relutância e medida em
8
13Deltamax é o nome industrial de um tipo de aço-silício usado em núcleos detransformadores.
henry-1, H-1. Num material magnético homogêneo, linear e isotrópico, de
comprimento l, seção reta uniforme S e permeabilidade magnética µ, a relutância é
dada por,
(2.12),≠ = l.S
Como o universo se acomoda de forma a possuir a menor energia, o fluxo
magnético procurará formar um caminho de menor relutância. Nos materiais
ferromagnéticos, os domínios magnéticos alinhados oferecem um caminho de menor
energia ao fluxo magnético. Daqui surge a força magnética experimentada nesses
materiais - o fluxo tenta concentrar-se o máximo possível na estrutura, atraindo esta
para sua fonte, para reduzir a relutância do caminho magnético.
A força magnética ainda pode ser conhecida de outro ponto de vista, quando
tem-se acesso a outras características do sistema magnético. Este ponto será
descrito a seguir:
Segundo a Lei de Lenz14, a variação do fluxo magnético que atravessa um
circuito induz uma força eletromotriz que opõe-se a esta variação. A Lei de Faraday
equaciona este relacionamento,
(2.13),e = − ddt
que transforma-se, pela Eq. (2.6), em,
(2.14),e = L $ dIdt
9
14Em 1833, Heinrich Lenz determina a lei do sentido das correntes induzidas.
Obs.: o sinal negativo na Eq. (2.13) indica a oposição enunciada pela Lei de Lenz,
podendo ser omitido por simples convenção.
A energia dissipada (ou armazenada, dependendo da configuração) de um
circuito é dada pelo produto da potência e o intervalo de tempo do evento,
(2.15),W = ¶ e.I.dt
que, pela Eq. (2.14),
(2.16),W = L.I2
2
Como a energia é o produto entre força e deslocamento e, admitindo que um
deslocamento infinitesimal causa uma variação também infinitesimal na indutância
do circuito,
(2.17),F = I2
2 $dLdx
Assim, a força pode também ser analisada pela variação da indutância do
sistema magnético com a variação de suas dimensões [2].
2.3. O Controle
Como o objetivo é manter uma esfera suspensa através do equilíbrio entre
força magnética e gravitacional, e a força magnética é produzida por uma corrente
elétrica que, por sua vez, surge por uma diferença de potencial elétrico (tensão
elétrica), é necessário a presença de algum mecanismo que regule esta tensão,
para alcançar o intento.
10
A tensão, portanto, pode ser comandada por um método bem eficiente - o
controle analógico com realimentação. Sistemas analógicos são utilizados,
geralmente, no controle de pequeno número de variáveis, com poucas entradas e
pequenas probabilidades de alteração nas características, pois acarretariam a
necessidade de novo circuito [7]. Assim, como a fonte de campo magnético e o
objeto a ser suspenso são de propriedades invariantes, o controle analógico é bem
satisfatório, pois é de fácil implementação. No caso de um controle digital, a
complexidade cresceria (interfaces analógico-digitais, composição de programas,
conhecimento de microcontroladores e periféricos etc.), impossibilitando sua
execução no tempo disponível.
A realimentação é dada pelo conhecimento da posição do objeto, realizado
pelo progressiva oclusão de um dispositivo sensível à luz. Em melhores palavras, à
medida que a esfera se movimenta, impede um facho de luz de alcançar o
dispositivo sensível. O sinal deste dispositivo é tratado, verificando se a posição
atual é a desejada.
O controle define a forma com que a esfera é conduzida à estabilização na
posição desejada. Em virtude do desconhecimento da função de transferência da
planta, no que se refere à transformada de Laplace15 (o domínio s), optou-se
inicialmente por uma malha de controle de posição, utilizando um controlador
proporcional-integral-derivativo (PID), de constantes ajustadas empiricamente e, no
decurso dos experimentos, apesar dos esforços, não se logrou êxito em manipulá-lo.
Recorreu-se, então, à formação de duas malhas de realimentação: uma com
controle proporcional e outra com controle por histerese16. É válido informar que
11
16Não há relação alguma com ciclo de histerese, e sua operação será descrita posteriormente.
15O marquês Pierre Simon de Laplace (1749-1827) foi um matemático e astrônomo francês,que ainda contribuiu ao eletromagnetismo.
houve uma tentativa de utilizar o controle proporcional-integral-derivativo e por
histerese conjuntamente. Entretanto, a resposta não se mostrou em nada
satisfatória, permanecendo semelhantes dificuldades de ajuste.
A primeira malha, de controle proporcional, destina-se ao posicionamento da
esfera, e a segunda, de controle por histerese, ao valor de corrente na fonte de
campo magnético. Um diagrama completo é apresentado na Seção 5.1. Seus
parâmetros serão igualmente ajustados no decurso dos experimentos.
O controlador proporcional tem a função de elevar a velocidade de operação
do sistema, pois amplifica o erro (diferença entre posição desejada e posição
conseguida) aplicando-o na planta [7]. Dessa forma, a planta “enxerga” um erro
maior do que o real, reagindo mais rapidamente ao estímulo. Entretanto, por ser
apenas um amplificador, faz-se necessária a existência de um sinal de erro em
regime permanente, pois, caso contrário, o sistema seria desligado.
O controlador integral diminui a velocidade de resposta do sistema e torna-a
oscilatória, mas cancela o erro de regime permanente (experimentalmente é quase
nulo). Adicionado ao proporcional, retira a característica de erro em regime não-nulo,
mas insere estas outras citadas.
O controlador derivativo responde à taxa de variação do erro, podendo
produzir uma correção do sistema antes do erro tornar-se demasiadamente grande.
Nunca é usado isoladamente, pois a taxa de variação do erro não define o valor
deste erro. Quando adicionado ao controlador proporcional, aumenta a
sensibilidade do sistema, iniciando uma ação de correção mais cedo. Por amortecer
o sistema, possibilita o uso de um ganho proporcional maior, melhorando a precisão
no regime permanente.
12
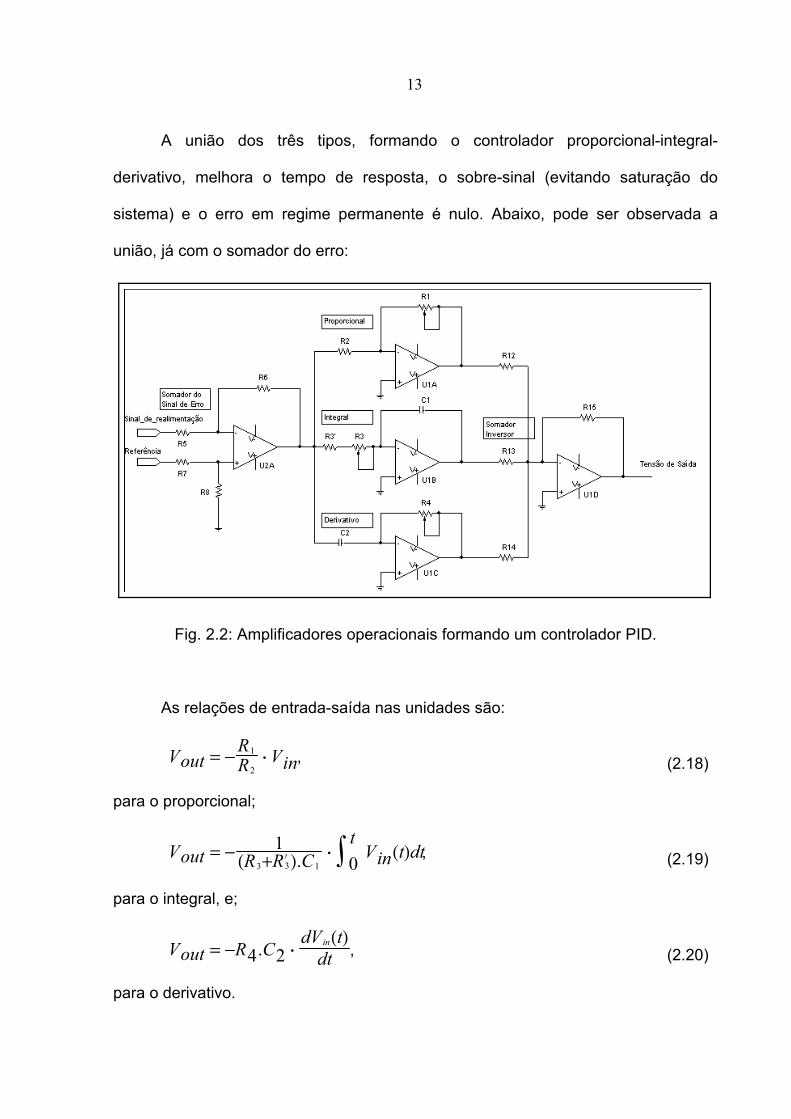
A união dos três tipos, formando o controlador proporcional-integral-
derivativo, melhora o tempo de resposta, o sobre-sinal (evitando saturação do
sistema) e o erro em regime permanente é nulo. Abaixo, pode ser observada a
união, já com o somador do erro:
Fig. 2.2: Amplificadores operacionais formando um controlador PID.
As relações de entrada-saída nas unidades são:
(2.18),Vout = −R1
R2$ Vin
para o proporcional;
(2.19),Vout = − 1(R3+R3
∏ ).C1$¶0tVin(t)dt
para o integral, e;
(2.20),Vout = −R4.C2 $dVin(t)dt
para o derivativo.
13

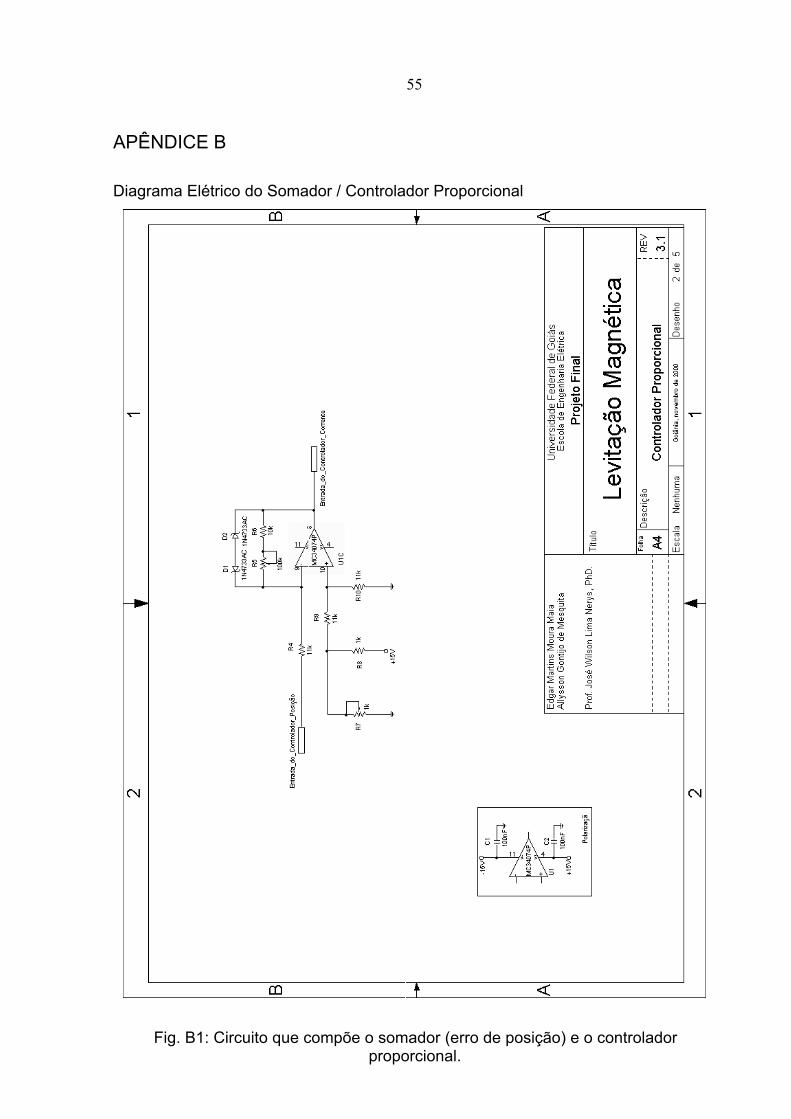
O somador inversor da saída retira o sinal negativo das relações, somando os
sinais das parcelas com a mesma ponderação (R12, R13, R14 e R15 com o mesmo
valor de resistência).
Este controle não obteve êxito. Conforme mencionado, a aplicação do
controle por histerese como alternativa para formar uma malha interna, objetivando
controlar a corrente, substituiu o uso do controlador integral. Sabendo que o
derivativo poderia acarretar picos de corrente destrutivos, foi removido do sistema de
controle.
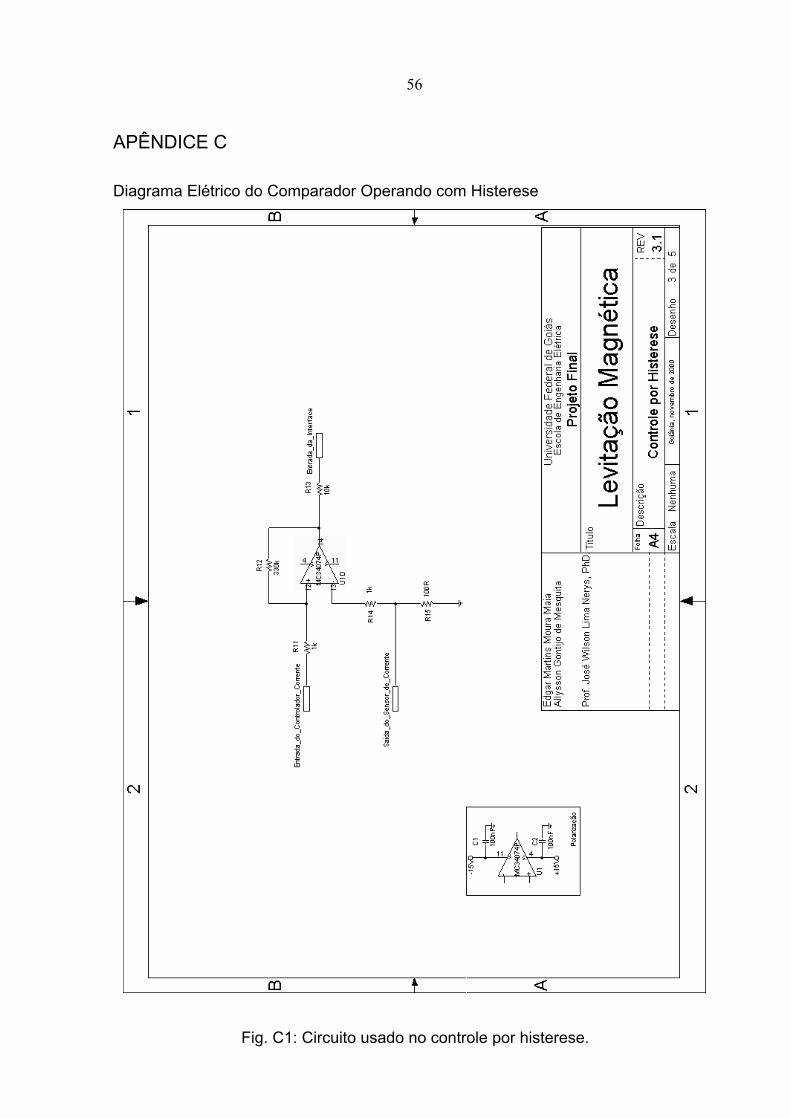
O controle por histerese opera ligando e desligando o sistema de alimentação
da fonte de campo magnético quando a corrente nesta está fora de uma faixa de
tolerância pré-estabelecida em torno da corrente requerida pelo sistema de controle
de posicionamento. No caso, o valor da corrente na fonte de campo magnético é
obtido por um sensor de efeito Hall17, na forma de tensão, para ser comparado com
o valor requerido. A Fig. 2.3 mostra o controle por histerese (nada mais que um
14
17Denomina-se efeito Hall o fenômeno do aparecimento de um campo elétrico em um metalou semicondutor quando estes, ao conduzirem uma corrente elétrica, são expostos a umcampo magnético transversal e uniforme [4].
Este campo elétrico é perpendicular ao plano formado pela direção da corrente e do campomagnético e tem a finalidade de restabelecer o estado de equilíbrio (Vide Seção 2.2: Força deLorentz).
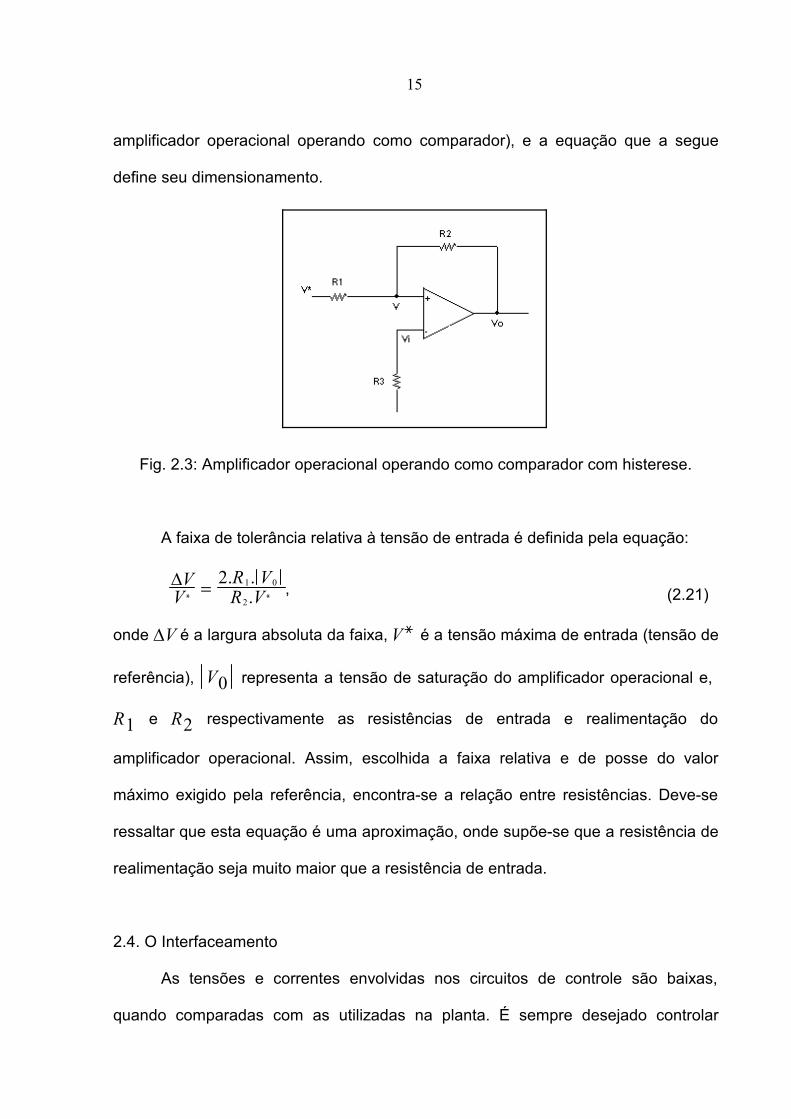
amplificador operacional operando como comparador), e a equação que a segue
define seu dimensionamento.
Fig. 2.3: Amplificador operacional operando como comparador com histerese.
A faixa de tolerância relativa à tensão de entrada é definida pela equação:
(2.21),VV& = 2.R1. V0
R2.V&
onde é a largura absoluta da faixa, é a tensão máxima de entrada (tensão deV V&
referência), representa a tensão de saturação do amplificador operacional e, V0
e respectivamente as resistências de entrada e realimentação doR1 R2
amplificador operacional. Assim, escolhida a faixa relativa e de posse do valor
máximo exigido pela referência, encontra-se a relação entre resistências. Deve-se
ressaltar que esta equação é uma aproximação, onde supõe-se que a resistência de
realimentação seja muito maior que a resistência de entrada.
2.4. O Interfaceamento
As tensões e correntes envolvidas nos circuitos de controle são baixas,
quando comparadas com as utilizadas na planta. É sempre desejado controlar
15

grandes quantidades de energia através de um pequeno dispêndio da mesma.
Sendo assim, um intermediário entre a fonte de campo magnético e o controlador é
necessário.
Um transistor bipolar de porta isolada (Insulated Gate Bipolar Transistor -
IGBT) e um transistor de efeito de campo de porta isolada por óxido metálico
(Metal-Oxide-Semiconductor Field-Effect Transistor - MOSFET) fazem o papel de
intermediários18. Ambos tem o acionamento idêntico, não representando diferenças
que impossibilitem o uso conjunto nesta aplicação [5]. O primeiro dispositivo tem a
capacidade de mudar seu estado (ligar ou desligar) em apenas um microsegundo19
(1µs), possuindo uma relação entre tensão de controle e tensão controlada de um
para quinhentos (1:500) e trabalhando com correntes elétricas chegando a mil e
duzentos (1200) ampères [9]. O segundo tem uma faixa de operação que excede mil
(1000) volts acionado por uma tensão de apenas cinco (5) volts [5]. Entretanto, o
sinal do controlador não é aplicado diretamente nestes dispositivos. Uma interface
de comando é colocada entre o sistema de controle e a alta tensão. Este interface,
um circuito integrado denominado 2110, garante tensão e corrente suficientes para
acionar as chaves de potência, e sua simultaneidade. Além disso, oferece isolação
16
19Sua freqüência de chaveamento ultrapassa vinte quilohertz (20kHz).
18Melhor seria adotar um único tipo de chave semicondutora de potência, aumentando aeficiência do sistema pela maior semelhança de características. Entretanto, a ausência destescomponentes no laboratório da Escola de Engenharia Elétrica, aliado ao seu elevado preço edificuldade de compra, forçou a utilização de diferentes tipos de chave em determinada fasedos experimentos.
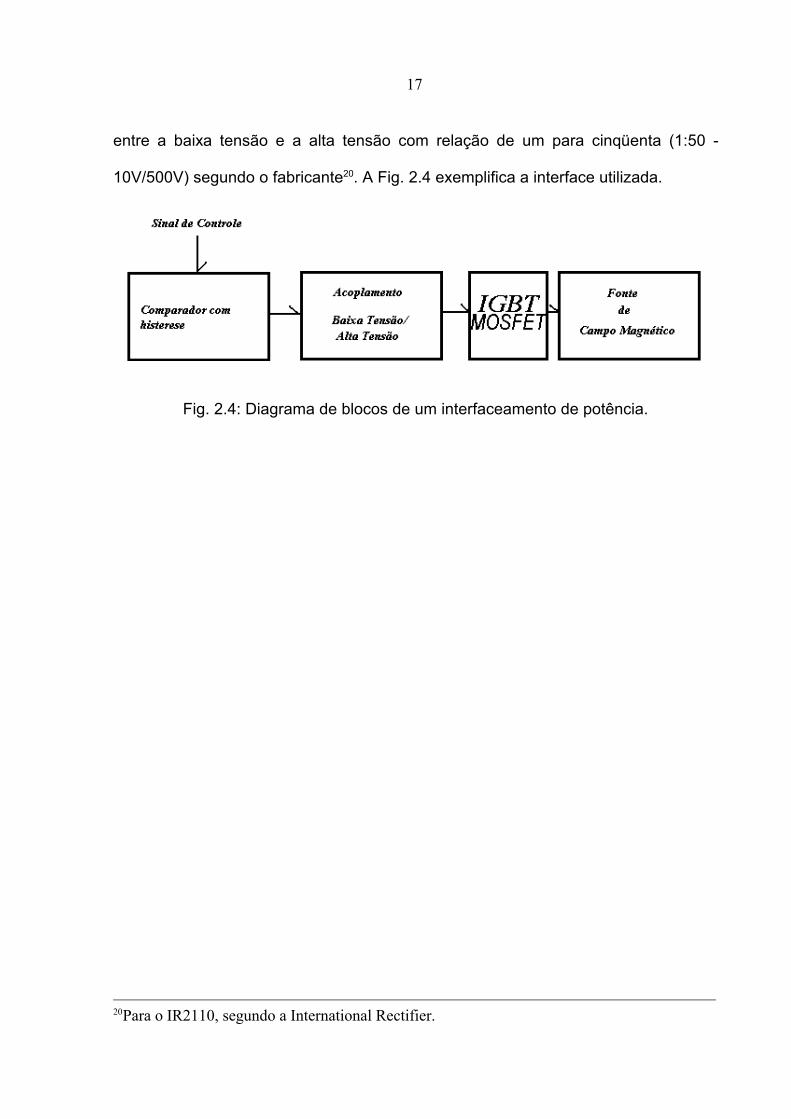
entre a baixa tensão e a alta tensão com relação de um para cinqüenta (1:50 -
10V/500V) segundo o fabricante20. A Fig. 2.4 exemplifica a interface utilizada.
Fig. 2.4: Diagrama de blocos de um interfaceamento de potência.
17
20Para o IR2110, segundo a International Rectifier.
3. O Projeto
3.1. Criação da Fonte de Campo Magnético
Como mencionado, o campo magnético necessário ao projeto tem origem na
circulação de uma corrente elétrica.
A Eq. (2.3) mostra que quanto maior for a corrente enlaçada no caminho
magnético, maior será a intensidade do campo sobre este caminho. Desta forma,
optou-se por um enrolamento de condutores, formando uma bobina, para ser a fonte
de campo magnético.
A bobina, somente, não representaria uma fonte eficiente, pois as linhas de
fluxo formadas estariam bem dispersas no ar. Assim, um núcleo laminado de
dezessete (17) centímetros de altura com uma base quadrada de dois (2)
centímetros de lado foi acrescentado ao enrolamento. Este núcleo, pelas
propriedades descritas na Seção 2.2, concentra as linhas de fluxo magnético,
tornando-as mais disponíveis para orientar momentos no corpo a ser suspenso. As
características do núcleo são desconhecidas, entretanto, os seguintes valores para
alguns materiais comuns são encontrados na Tab. 3.1 [1] e [3]:
18
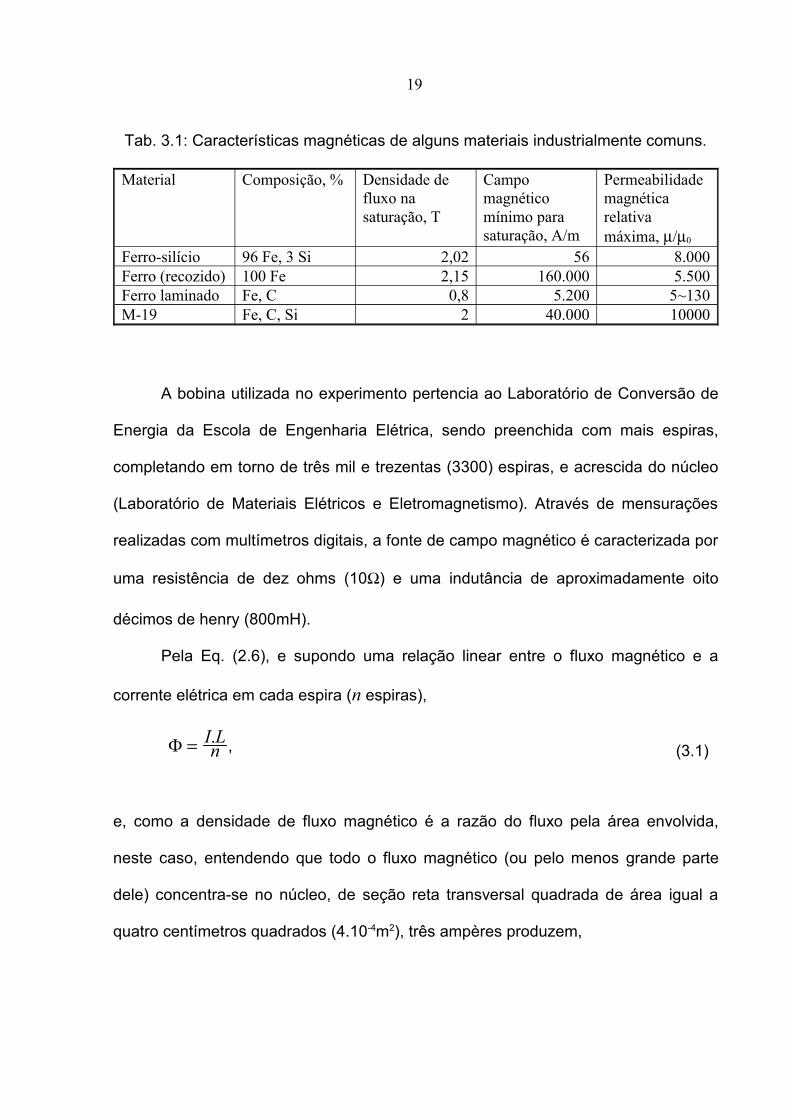
Tab. 3.1: Características magnéticas de alguns materiais industrialmente comuns.
1000040.0002Fe, C, SiM-195~1305.2000,8Fe, CFerro laminado5.500160.0002,15100 FeFerro (recozido)8.000562,0296 Fe, 3 SiFerro-silício
Permeabilidademagnéticarelativamáxima, µ/µ0
Campomagnéticomínimo parasaturação, A/m
Densidade defluxo nasaturação, T
Composição, %Material
A bobina utilizada no experimento pertencia ao Laboratório de Conversão de
Energia da Escola de Engenharia Elétrica, sendo preenchida com mais espiras,
completando em torno de três mil e trezentas (3300) espiras, e acrescida do núcleo
(Laboratório de Materiais Elétricos e Eletromagnetismo). Através de mensurações
realizadas com multímetros digitais, a fonte de campo magnético é caracterizada por
uma resistência de dez ohms (10Ω) e uma indutância de aproximadamente oito
décimos de henry (800mH).
Pela Eq. (2.6), e supondo uma relação linear entre o fluxo magnético e a
corrente elétrica em cada espira (n espiras),
(3.1),= I.Ln
e, como a densidade de fluxo magnético é a razão do fluxo pela área envolvida,
neste caso, entendendo que todo o fluxo magnético (ou pelo menos grande parte
dele) concentra-se no núcleo, de seção reta transversal quadrada de área igual a
quatro centímetros quadrados (4.10-4m2), três ampères produzem,
19
B = S = I.Ln.S =(3A).(8.10−3H)
(3300e).(4.10−4m)
B j 1, 82T
um valor considerável, tendo que, pela Tab. 3.1, os melhores materiais relacionados
já tem sua saturação em torno de dois (2) teslas.
3.2. A Esfera Metálica
Uma esfera de aço, usada em rolamentos de maquinaria pesada (caminhões,
tratores etc.), foi adquirida em comércio. Com um diâmetro de uma polegada e um
quarto (1,25pol ou 3,175cm) tem uma massa de cento e doze (112) gramas, medida
com uma balança eletrônica.
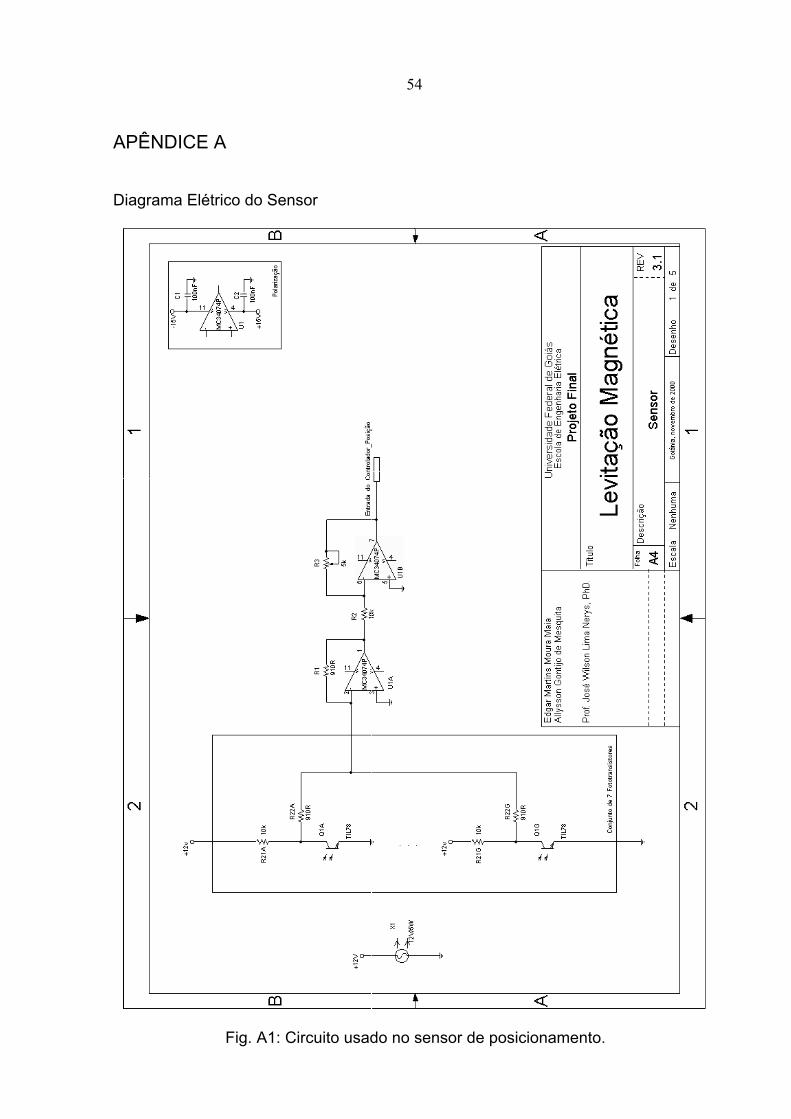
3.3. A Localização do Objeto
Como mencionado na seção 2.3, a esfera metálica é localizada pela oclusão
de um dispositivo sensível à luz. Este dispositivo é formado por um conjunto de
fototransistores, montados convenientemente, de forma que, conforme a quantidade
20
de energia luminosa que incide sobre eles e sobre quais deles pode-se detectar o
posicionamento do objeto somando-se os sinais provenientes de cada um.
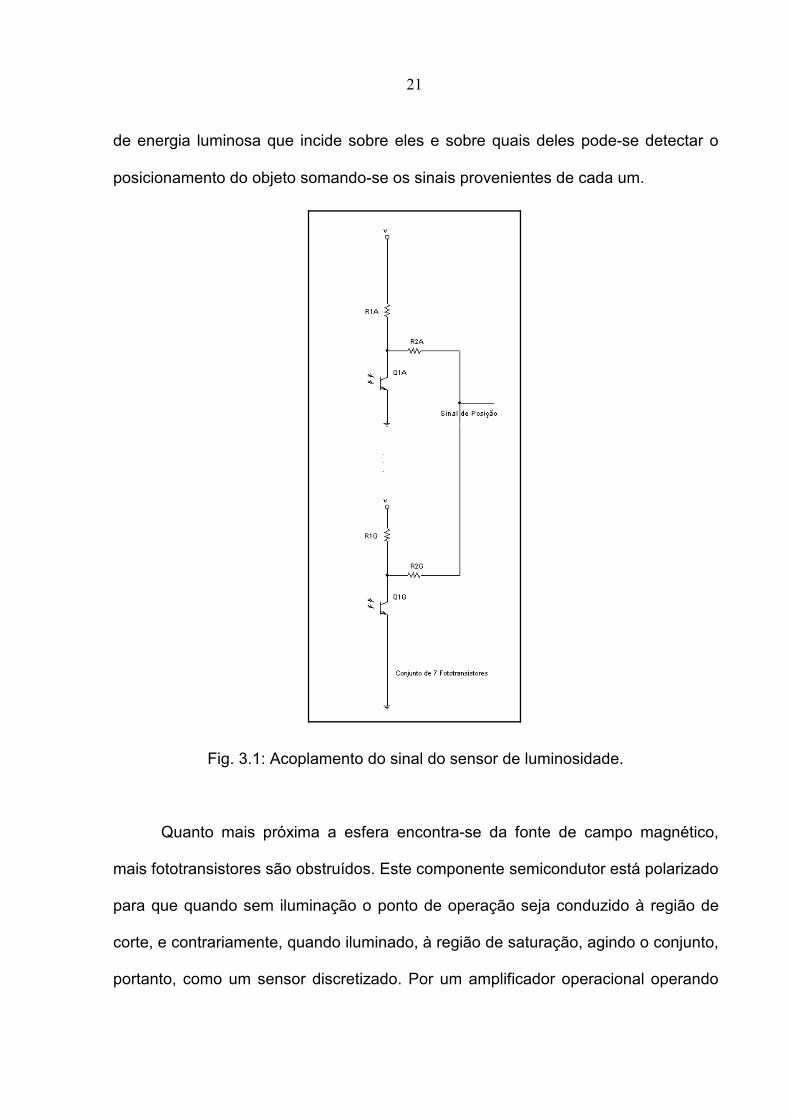
Fig. 3.1: Acoplamento do sinal do sensor de luminosidade.
Quanto mais próxima a esfera encontra-se da fonte de campo magnético,
mais fototransistores são obstruídos. Este componente semicondutor está polarizado
para que quando sem iluminação o ponto de operação seja conduzido à região de
corte, e contrariamente, quando iluminado, à região de saturação, agindo o conjunto,
portanto, como um sensor discretizado. Por um amplificador operacional operando
21
como somador, a tensão sobre os fototransistores é coletada e somada, fornecendo
ao controle o posicionamento da esfera.
3.4. A Característica Força-Corrente-Distância
O comportamento da força magnética foi encontrado pela medição da
“massa” da esfera.
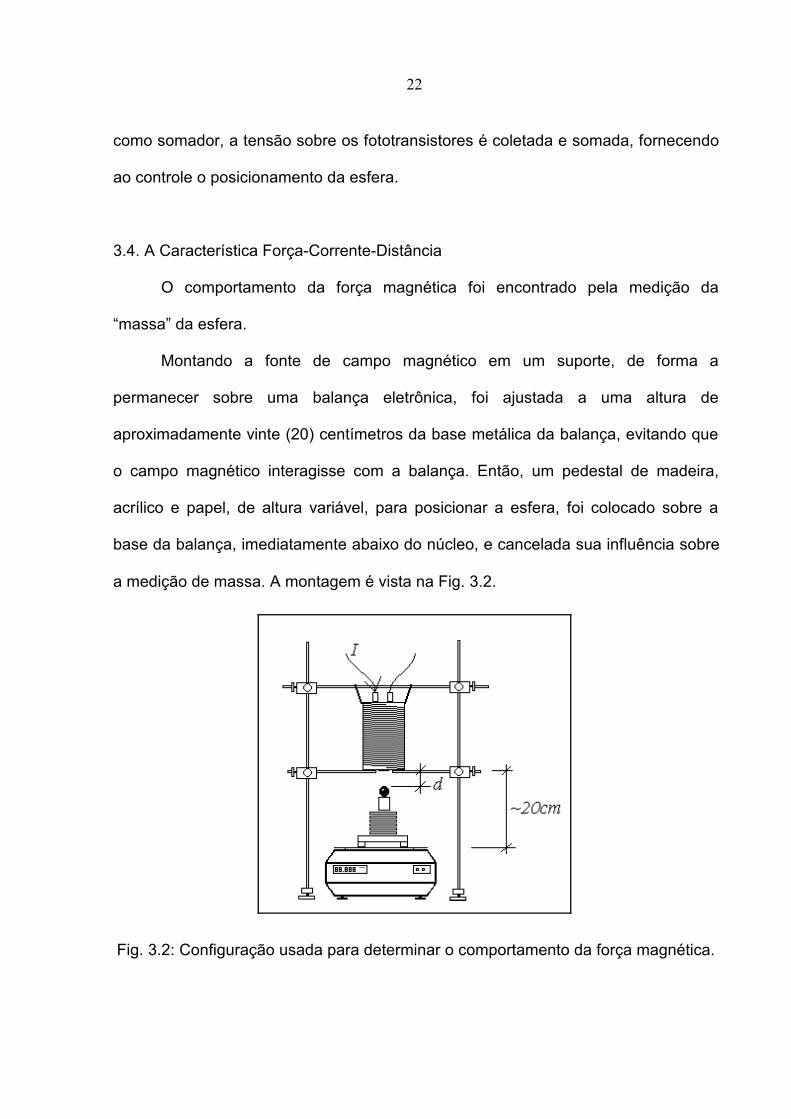
Montando a fonte de campo magnético em um suporte, de forma a
permanecer sobre uma balança eletrônica, foi ajustada a uma altura de
aproximadamente vinte (20) centímetros da base metálica da balança, evitando que
o campo magnético interagisse com a balança. Então, um pedestal de madeira,
acrílico e papel, de altura variável, para posicionar a esfera, foi colocado sobre a
base da balança, imediatamente abaixo do núcleo, e cancelada sua influência sobre
a medição de massa. A montagem é vista na Fig. 3.2.
Fig. 3.2: Configuração usada para determinar o comportamento da força magnética.
22
A “massa” da esfera foi, então, medida para diferentes valores de corrente de
alimentação e distâncias esfera - fonte de campo magnético. A massa da esfera
decrescida dos valores medidos e multiplicada pela aceleração da gravidade é a
força magnética.
Estas medições possibilitaram a formação de uma tabela, que auxiliou no
estabelecimento de uma função para a força [8],
(3.2),F = f(I, d)
onde I representa a corrente de alimentação e d a menor distância entre a esfera e
a fonte de campo magnético.
3.5. Modelamento Matemático da Planta21
A execução do procedimento descrito na seção 3.4 resultou nos valores da
Tab. 3.2. Decrementando cada um destes dados da massa da esfera (112g) e
representando o resultado em gráficos, percebeu-se que há uma considerável
linearidade entre o logaritmo22 do inverso da força magnética (F) e a distância (d),
(3.3),log(0, 0098.F−1) = a.d + b
Obs.: Os valores de força nula são retirados, pois a função logarítmica é
descontínua quando seu argumento é nulo.
23
22O logaritmo aqui tratado é na base neperiana (ln ou loge).
21O modelamento (interpolações, aproximações, gráficos e modelo) foi obtido com o auxíliodo MATLAB v5.3.

As retas formadas, para cada valor de corrente elétrica23, são deslocadas
uma das outras conforme uma dependência da própria corrente, subentendendo
uma forma,
(3.4),log(0, 0098.F−1) = a.d + b(I)
que é comprovada quando se interpola o logaritmo do módulo24 de b segundo o
logaritmo da corrente elétrica, em acordo com um polinômio de segundo grau,
(3.5),log(|b|) = p.[log(I)]2 + q.[log(I)] + r
24
24É necessário o uso do valor absoluto (módulo), pois da interpolação que origina a Eq. (3.3)os valores de b são todos negativos.
23Os dados obtidos com os três últimos valores de corrente são desconsiderados, poisdesrespeitaram a linearidade desejada.

Tab. 3.2: Os valores de “massa” da esfera (gramas) quando a uma distância d dafonte de campo magnético, estando esta alimentada com uma corrente I.
-----------785,75
----------72805,50
-------12395774815,25
------1217426177835,00
------1722463779844,75
------2227507081864,50
------2732547283874,25
-----03337587585894,00
-----113842614887903,75
-----194347658089923,50
-----274851698290933,25
----11405861768794953,00
----23476366799094962,75
----23476366799096982,50
---734556971839298992,25
---214462747787951001012,00
--9375671818391981021031,75
-2325366798789961011041051,50
-305568798894951001041061071,25
335772829095991001041061081081,00
65788994981021041051071091101100,75
88951001031051071081081101101111110,50
1041061081091091101101101111121121120,25
1,381,671,952,182,482,733,013,293,573,854,144,40d (cm)hI (A)o
25
Assim, isolando o valor deste deslocamento, tem-se,
(3.6),b = −er.I[log(I)]p+q
Substituindo o deslocamento na força magnética25, e também isolando-a,
(3.7),F(d, I) = 0, 0098. exp(exp(r).I(logp(I)+q) − 10−2.a.d)
onde a corrente elétrica I é dada em ampères, a distância d em metros e a força
magnética F em newtons.
A interpolação, seguindo estas funções, resultam nos seguintes valores para
as constantes26:
a = 9,733340495804534.10-1;
p = -4,952032521164080.10-2;
q = 2,609467113568522.10-1 , e;
r = 1,733427614239792.
26
26A programação desenvolvida no MATLAB com a finalidade de modelar a planta pode serencontrada nos apêndices (APÊNDICE G - I).
25A função exp(x) é uma simples substituição da simbologia ex.

Para mostrar os dados da Tab. 3.1, subtraídos da massa da esfera, tem-se a
Fig. 3.3. O termo utilizado - "redução de massa" - representa a diferença entre a
massa real e a leitura obtida na balança eletrônica.
Fig. 3.3: A Tab. 3.2, retirada a massa da esfera, traçada em gráfico.
27
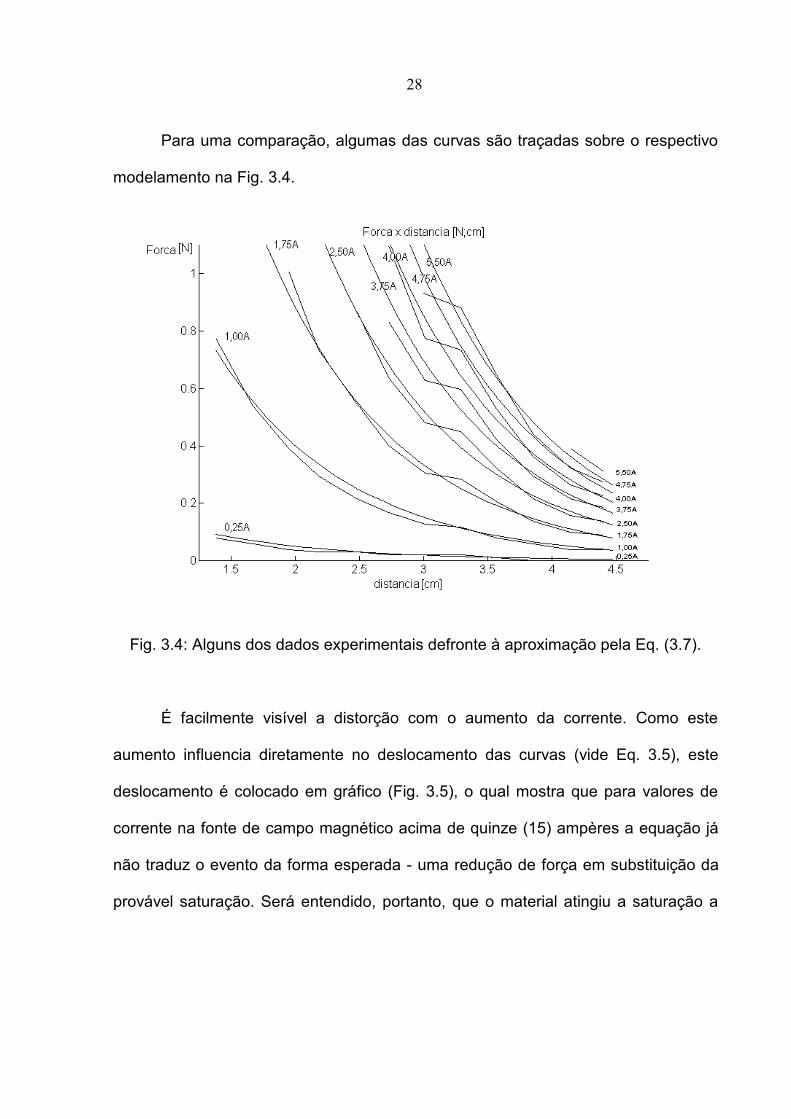
Para uma comparação, algumas das curvas são traçadas sobre o respectivo
modelamento na Fig. 3.4.
Fig. 3.4: Alguns dos dados experimentais defronte à aproximação pela Eq. (3.7).
É facilmente visível a distorção com o aumento da corrente. Como este
aumento influencia diretamente no deslocamento das curvas (vide Eq. 3.5), este
deslocamento é colocado em gráfico (Fig. 3.5), o qual mostra que para valores de
corrente na fonte de campo magnético acima de quinze (15) ampères a equação já
não traduz o evento da forma esperada - uma redução de força em substituição da
provável saturação. Será entendido, portanto, que o material atingiu a saturação a
28
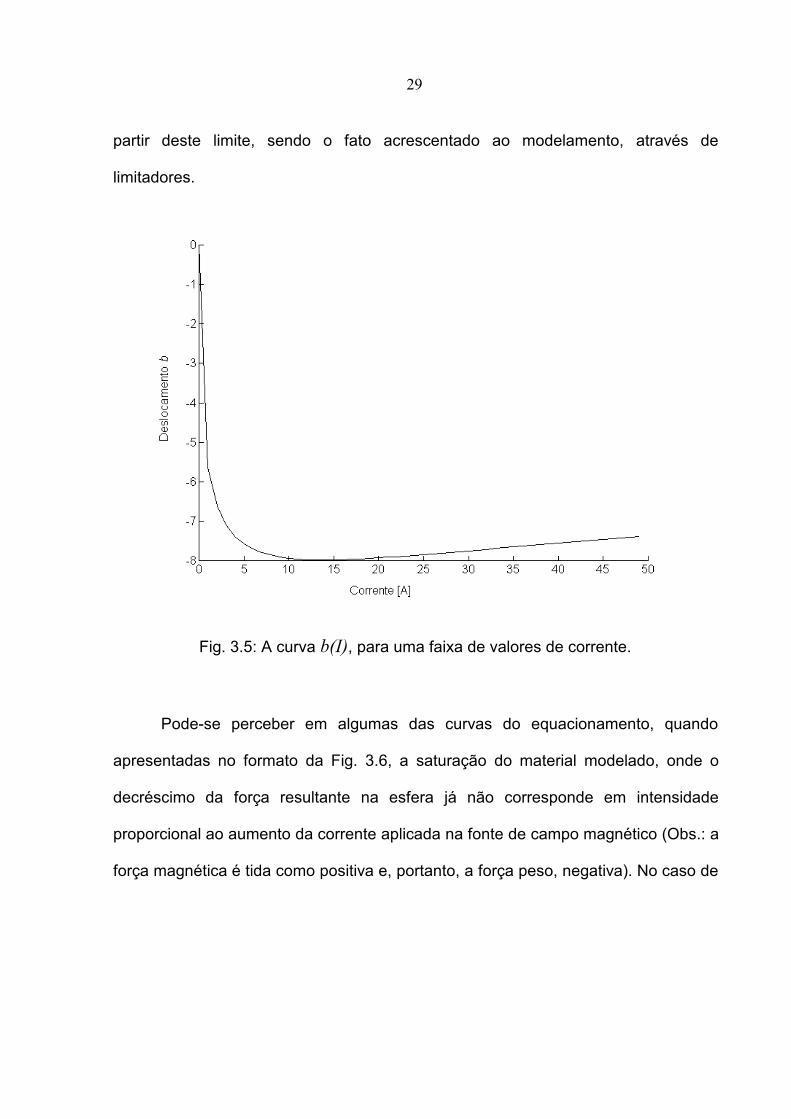
partir deste limite, sendo o fato acrescentado ao modelamento, através de
limitadores.
Fig. 3.5: A curva b(I), para uma faixa de valores de corrente.
Pode-se perceber em algumas das curvas do equacionamento, quando
apresentadas no formato da Fig. 3.6, a saturação do material modelado, onde o
decréscimo da força resultante na esfera já não corresponde em intensidade
proporcional ao aumento da corrente aplicada na fonte de campo magnético (Obs.: a
força magnética é tida como positiva e, portanto, a força peso, negativa). No caso de
29

distância nula, nota-se que uma corrente de aproximadamente meio (0,5) ampère é
exigida para igualar forças peso e magnética.
Fig. 3.6: As curvas de modelamento força x corrente, para várias distâncias.
30
4. Análise Computacional
A equação da fonte de campo magnético, além de outros parâmetros do
sistema, tais como, massa da esfera e distâncias limítrofes (base, topo),
possibilitaram a utilização de um aplicativo para análise computacional - o
MATLAB/Simulink. Para tanto, todas as características consideradas foram traduzidas
em forma de blocos.
4.1. A Fonte de Força Magnética
Até agora, considerou-se a fonte como de campo magnético. Entretanto, será
referenciada neste capítulo como fonte de força magnética, pois só este parâmetro é
conhecido experimentalmente, e equacionado.
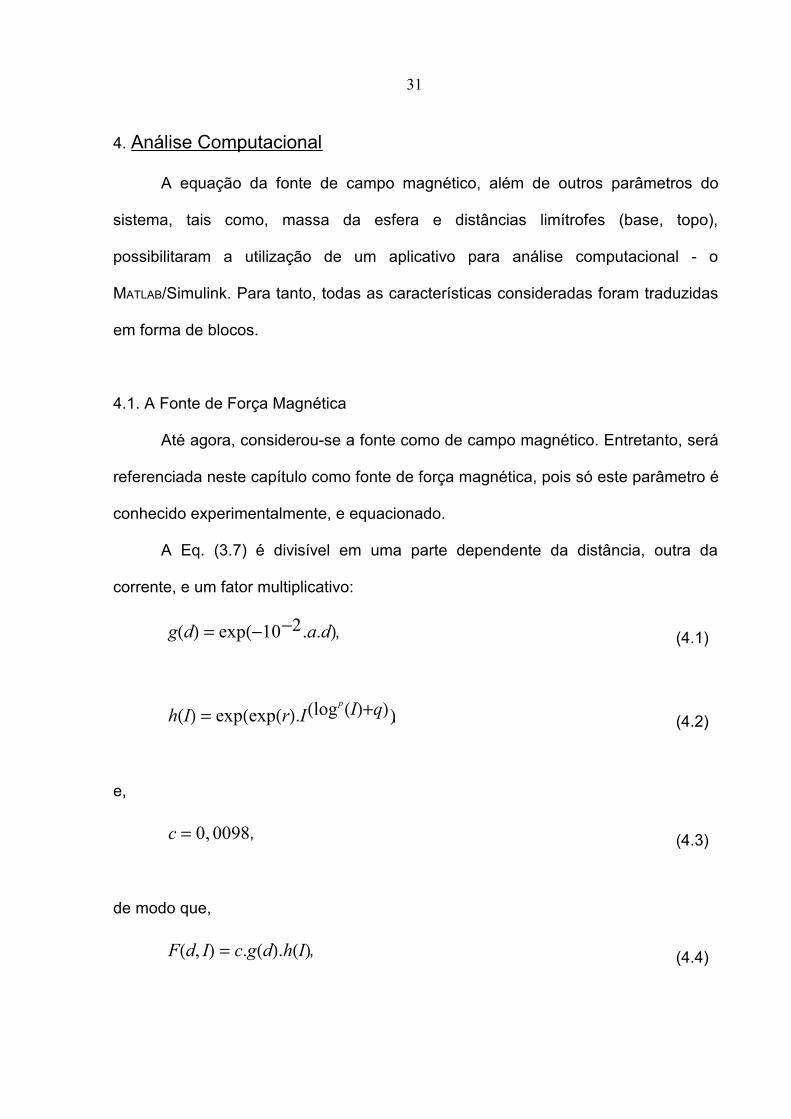
A Eq. (3.7) é divisível em uma parte dependente da distância, outra da
corrente, e um fator multiplicativo:
(4.1),g(d) = exp(−10−2.a.d)
(4.2),h(I) = exp(exp(r).I(logp(I)+q))
e,
(4.3),c = 0, 0098
de modo que,
(4.4),F(d, I) = c.g(d).h(I)
31
O modelo em blocos usa esta separação em fatores, para uma melhor
visualização. Abaixo, é então apresentado:
Fig. 4.1: A fonte de força magnética, segundo o equacionamento definido.
Contudo, foi mencionado na Seção 2.3. que será aplicada uma tensão na
fonte de força magnética e, como esta fonte é uma bobina, deve-se acrescentar ao
modelo a característica da mesma - o relacionamento entre tensão e corrente.
Trabalhando no domínio s, a equação de malha de um circuito série com
fonte de tensão de valor v(t), um indutor com indutância L e resistência r, percorrido
pela corrente i(t) é dada por,
(4.5),V(s) = r.I(s) + L.s.I(s)
32

Isolando-se a corrente e aplicando o resultado ao modelo anterior, obtém-se
uma interpretação mais completa:
Fig. 4.2: A fonte de força magnética completa.
4.2. A Esfera e seu Movimento
O posicionamento da esfera, sua faixa de movimentação e peso também
devem ser fornecidos ao modelo.
A forca, F, relaciona-se com a aceleração, α, através da massa, m. A
aceleração, α,, é a derivada da velocidade, v, e segunda derivada da posição, d, em
relação ao tempo. Assim,
(4.6),F(t) = m. (t)
e,
(4.7),(t) =dv(t)dt =
d2d(t)dt2
33
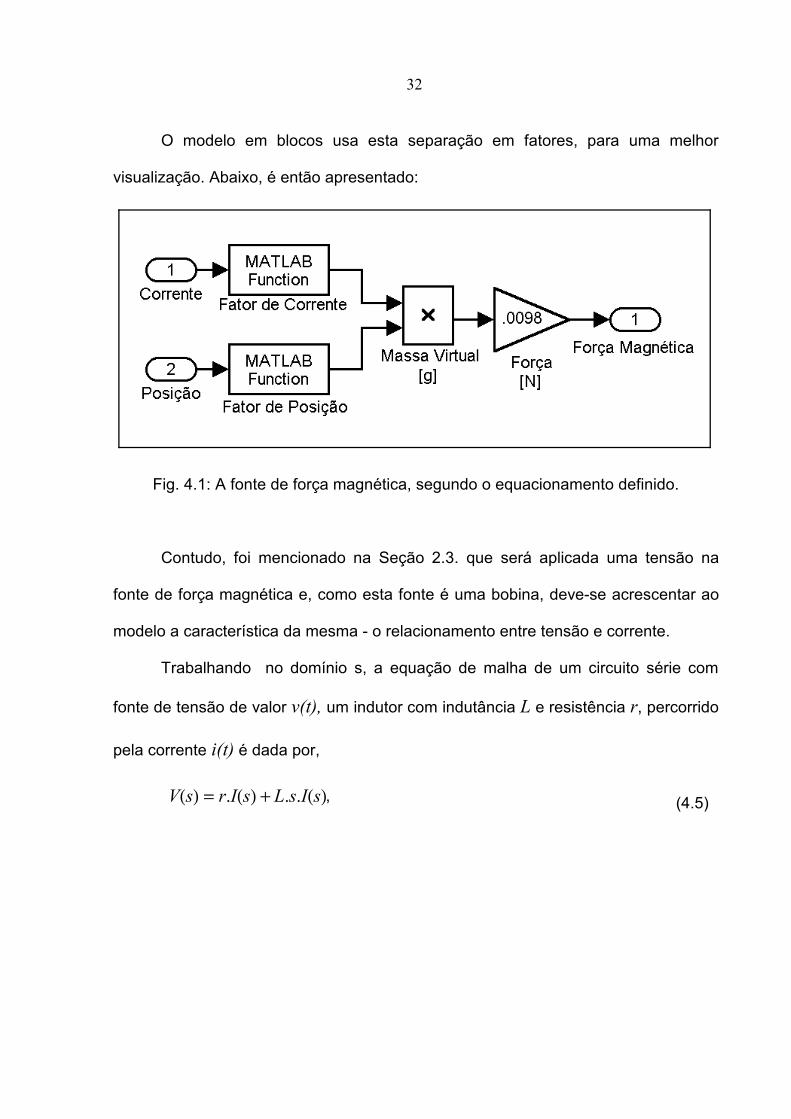
que por integrações, são colocadas no modelo, pois a saída e a posição.
Independente dos limites usados na parte real, foi considerado na análise
computacional que o topo da esfera pode se movimentar da posição de dois
centímetros e meio (0,025m) até a posição zero, respectivamente, sobre o pedestal
de repouso e suspensa em contato com a fonte de força magnética.
O modelo que define isto é dado a seguir:
Fig. 4.3: A tradução em blocos do movimento da esfera.
34
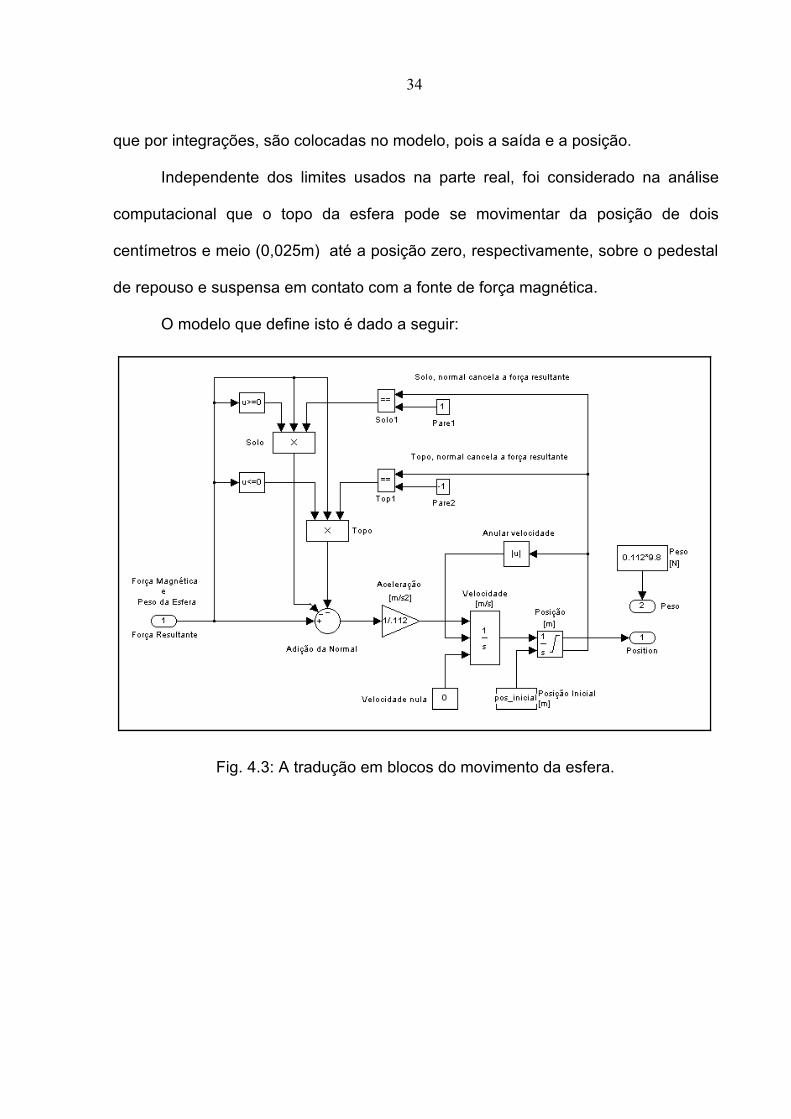
4.3. A Planta
Reunindo a fonte de força magnética, a esfera e suas implicações, obtém-se
a planta do sistema.
Fig. 4.4: O objeto do controle - a planta.
4.4. O Controlador
Apesar do descrito na Seção 2.3, um controlador proporcional-integral-
derivativo compõe o modelo. Isto deve-se ao fato que um sistema por histerese
(liga-desliga) acarretaria um grande esforço computacional e, sendo o objetivo da
simulação obter apenas a idéia do comportamento do sistema devido ao
desconhecimento e a mais que provável complexidade das equações planta no
domínio s não se percebe a necessidade de fidelidade ao controle usado
experimentalmente. Assim, por intermédio de sucessivas simulações, os valores das
35

constantes de cada unidade que forma o controlador serão determinadas,
respectivamente, kp, ki, e kd.
Em atenção aos limites operacionais de integrados27 que servirão para
realizar o controle no experimento [6], foram acrescentados ao modelo de blocos
informações quanto a esta saturação. O controlador, então, é mostrado na Fig. 4.5.
Fig. 4.5: O controlador proporcional-integral-derivativo, com restrições de saída.
4.5. O Interfaceamento
Com respeito aos modelos usados, na Seção 2.4 mencionou-se o
interfaceamento por um circuito integrado 2110. Entretanto, a saída do mesmo
representa a saída do controle por histerese, que pode atingir dezenas de quilohertz,
o que causa um período de décimos de milisegundo. Obviamente, a simulação deve
36
27De antemão, os amplificadores operacionais usados têm um módulo de tensão máximo nasaída igual a quinze (15) volts, devido a alimentação usada.
caracterizar-se por um passo de cálculo bem menor que o período do sinal aplicado.
Assim, um tempo absurdo seria necessário para obter valores de controle
satisfatórios, inviabilizando a análise computacional (na tentativa, notou-se haveria
necessidade do dispêndio de vários dias). Porém, a idéia da histerese é variar o
valor sinal de corrente dentro de uma faixa, o que é feito ‘analogicamente’ na
aplicação do sinal de controle apenas amplificado. Entende-se que o comportamento
será equivalente.
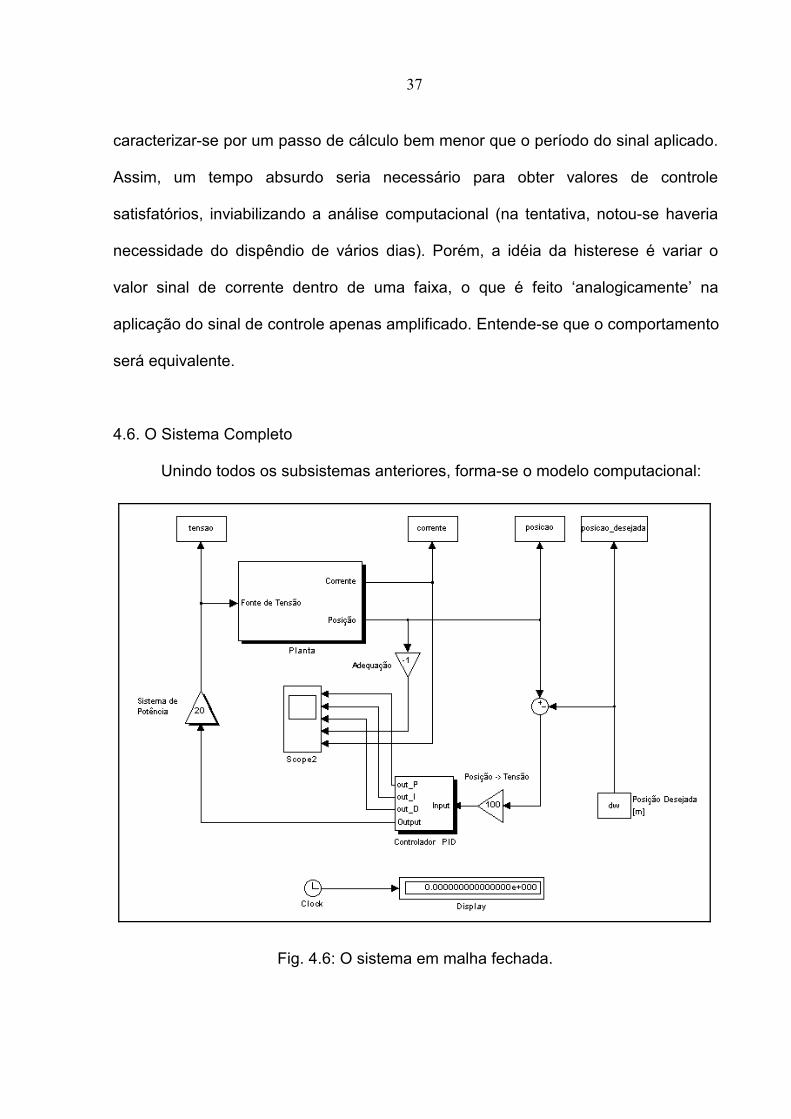
4.6. O Sistema Completo
Unindo todos os subsistemas anteriores, forma-se o modelo computacional:
Fig. 4.6: O sistema em malha fechada.
37
4.7. A Estabilidade Computacionalmente Conseguida
Após subseqüentes simulações, que não foram registradas, conseguiu-se a
estabilidade da esfera em uma posição desejada, dezesseis milímetros (0,016m),
conforme as definições anteriores.
Esta estabilidade necessitou dos seguintes valores para as constantes do
controlador:
kp = 12;
ki = 10, e;
kd = 5;
38
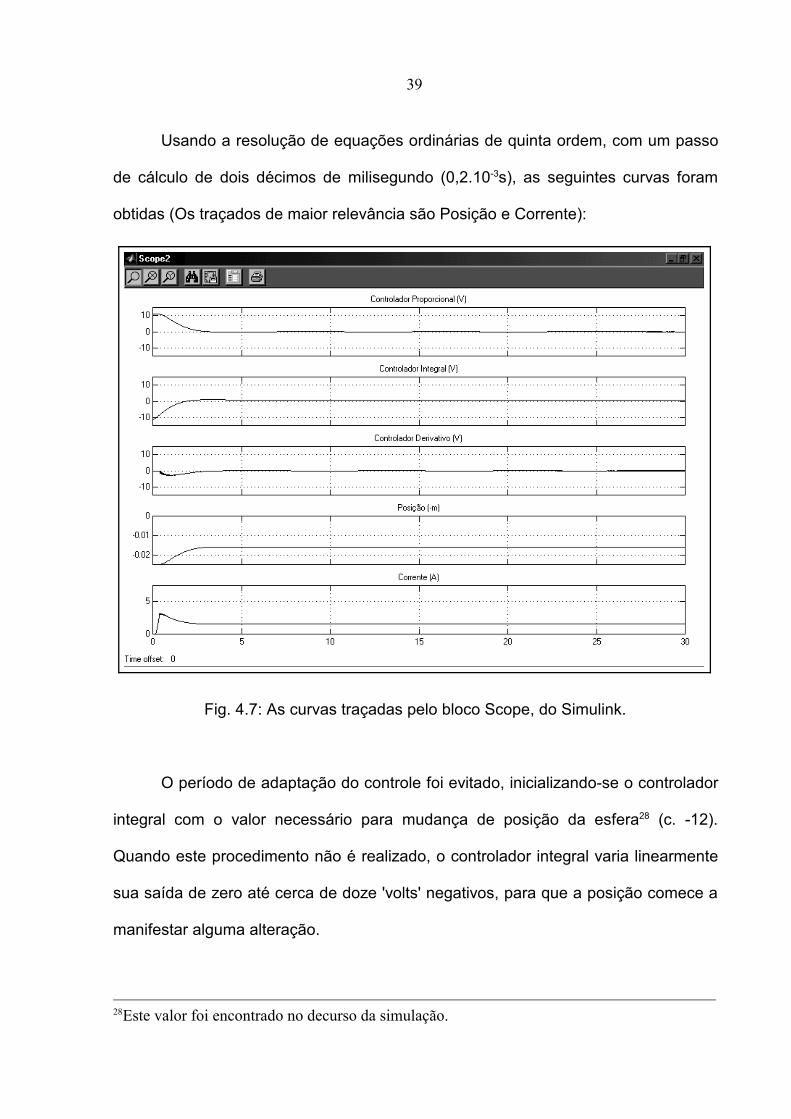
Usando a resolução de equações ordinárias de quinta ordem, com um passo
de cálculo de dois décimos de milisegundo (0,2.10-3s), as seguintes curvas foram
obtidas (Os traçados de maior relevância são Posição e Corrente):
Fig. 4.7: As curvas traçadas pelo bloco Scope, do Simulink.
O período de adaptação do controle foi evitado, inicializando-se o controlador
integral com o valor necessário para mudança de posição da esfera28 (c. -12).
Quando este procedimento não é realizado, o controlador integral varia linearmente
sua saída de zero até cerca de doze 'volts' negativos, para que a posição comece a
manifestar alguma alteração.
39
28Este valor foi encontrado no decurso da simulação.
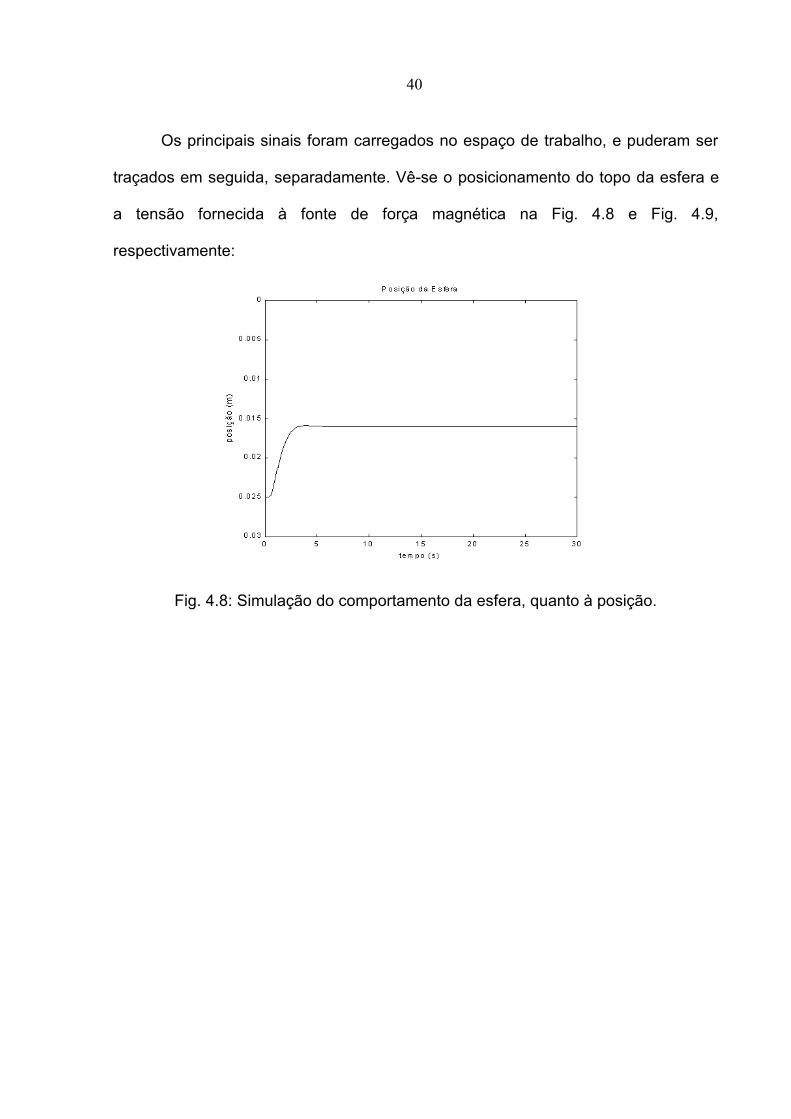
Os principais sinais foram carregados no espaço de trabalho, e puderam ser
traçados em seguida, separadamente. Vê-se o posicionamento do topo da esfera e
a tensão fornecida à fonte de força magnética na Fig. 4.8 e Fig. 4.9,
respectivamente:
Fig. 4.8: Simulação do comportamento da esfera, quanto à posição.
40

Fig. 4.9: A tensão necessária para suspender e estabilizar a esfera.
Uma ampliação é realizada na região de maior oscilação, para melhor
visualização:
Fig. 4.10: A tensão aplicada com ampliação na região de oscilação mais acentuada.
41
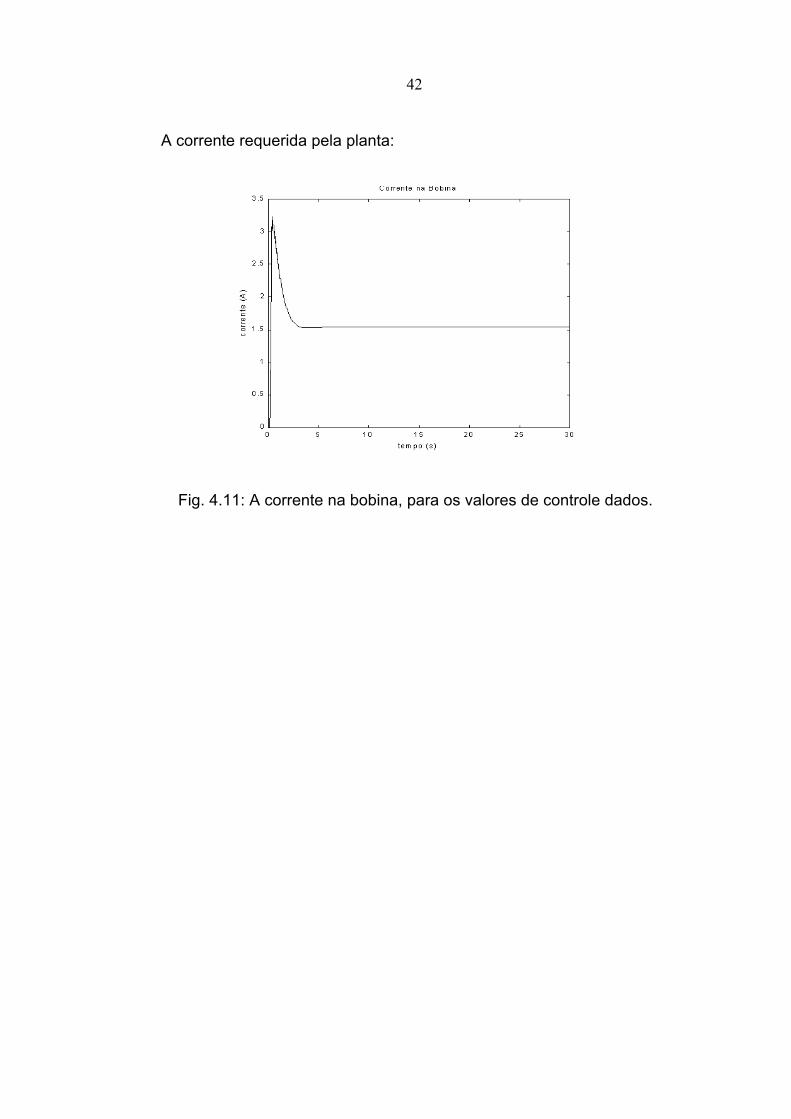
A corrente requerida pela planta:
Fig. 4.11: A corrente na bobina, para os valores de controle dados.
42
5. Resultados Experimentais
5.1. Do Descontrole ao Controle
A idéia inicial previa uma leitura de posição por intermédio de um resistor
fotossensível (LDR) iluminado por um ponto de luz próximo (c. 20cm) representado
por uma lâmpada incandescente (12V/5W). Possuindo o resistor fotossensível
formato circular e diâmetro aproximado de três centímetros (3cm), seria ideal para
localizar a esfera. Entretanto, sua velocidade de resposta à variação de
luminosidade é muito inferior ao exigido para o controle da planta. Dessa maneira,
adotou-se o fototransistor conforme já relatado na Seção 3.3. Este possui resposta à
variação de energia luminosa incidente consideravelmente mais rápida que o
resistor fotossensível. Como a área sensível de um fototransistor é muito pequena
em relação às dimensões trabalhadas, um conjunto foi necessário para amenizar o
efeito de discretização. Devido a questões construtivas, um grupo composto de sete
fototransistores forma o sensor de posicionamento. O sinal proveniente de cada um
deles é somado por intermédio de um amplificador operacional na configuração de
somador inversor. O circuito é montado de modo que quanto mais fototransistores
forem cobertos pela sombra do objeto erguido pela força magnética, maior é o
43
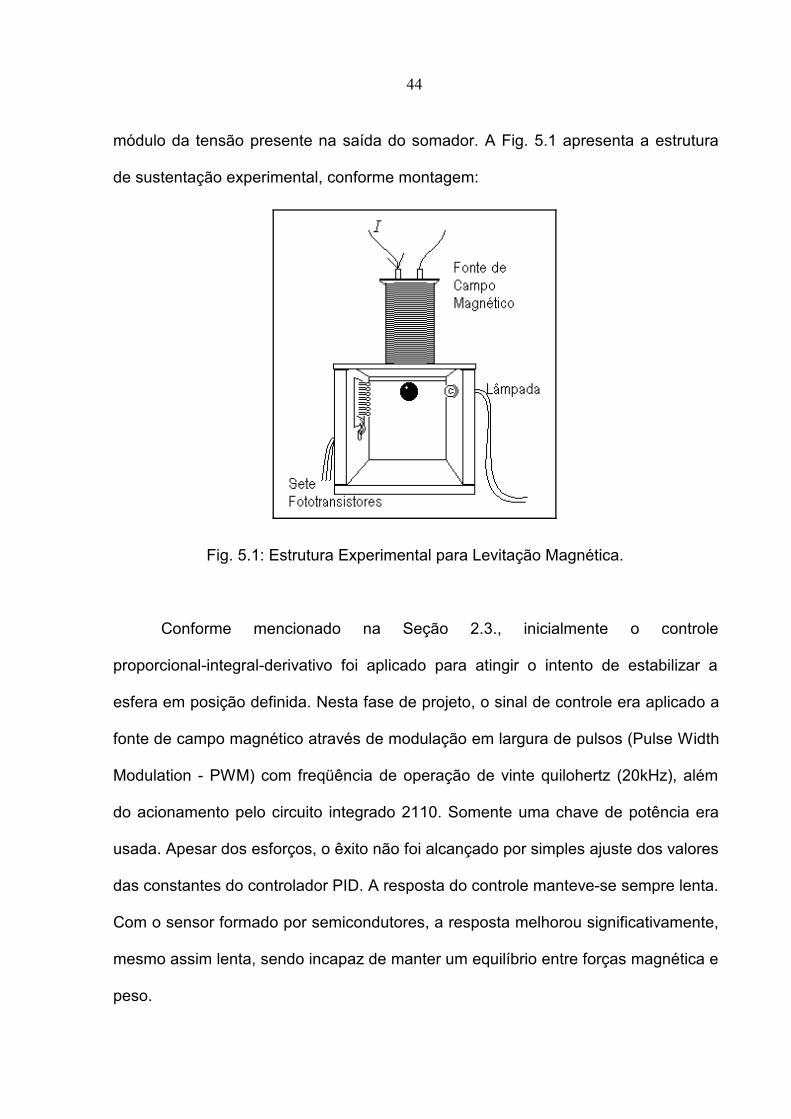
módulo da tensão presente na saída do somador. A Fig. 5.1 apresenta a estrutura
de sustentação experimental, conforme montagem:
Fig. 5.1: Estrutura Experimental para Levitação Magnética.
Conforme mencionado na Seção 2.3., inicialmente o controle
proporcional-integral-derivativo foi aplicado para atingir o intento de estabilizar a
esfera em posição definida. Nesta fase de projeto, o sinal de controle era aplicado a
fonte de campo magnético através de modulação em largura de pulsos (Pulse Width
Modulation - PWM) com freqüência de operação de vinte quilohertz (20kHz), além
do acionamento pelo circuito integrado 2110. Somente uma chave de potência era
usada. Apesar dos esforços, o êxito não foi alcançado por simples ajuste dos valores
das constantes do controlador PID. A resposta do controle manteve-se sempre lenta.
Com o sensor formado por semicondutores, a resposta melhorou significativamente,
mesmo assim lenta, sendo incapaz de manter um equilíbrio entre forças magnética e
peso.
44
Com isso, resolveu-se adicionar, além da posição, uma nova malha de
controle, agora para a corrente. Através da leitura da corrente por um semicondutor
(efeito Hall: vide Seção 2.3) a corrente requerida pelo controlador é mais
rapidamente aplicada à fonte de campo magnético com a atuação de um controle
por histerese. Com a corrente da fonte de campo magnético atravessando o sensor
de corrente cinco vezes, obtém-se uma saída de meio volt para cada ampère, com a
inserção de um resistor propriamente escolhido (100Ω). O controle por histerese é
configurado para uma faixa relativa de aproximadamente 2% (cf. Eq. 2.21,
substituindo por 4,7V (devido ao limitador), por 15V e, e V& V0 R1 R2
respectivamente por 1kΩ e 330kΩ). Esta faixa previne que freqüências de
acionamento do circuito de potência tornem-se muito altas, desgastando-o devido a
dissipação desnecessária de potência. A Fig. 5.2 ilustra o sistema de levitação
45
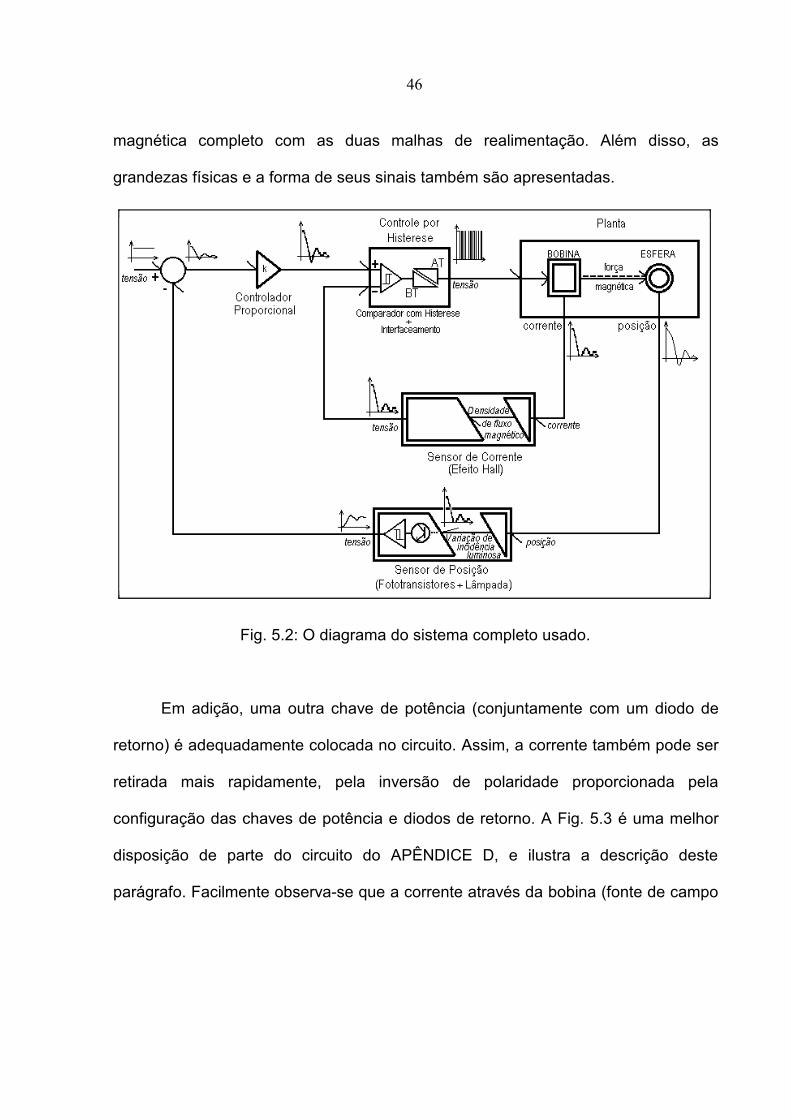
magnética completo com as duas malhas de realimentação. Além disso, as
grandezas físicas e a forma de seus sinais também são apresentadas.
Fig. 5.2: O diagrama do sistema completo usado.
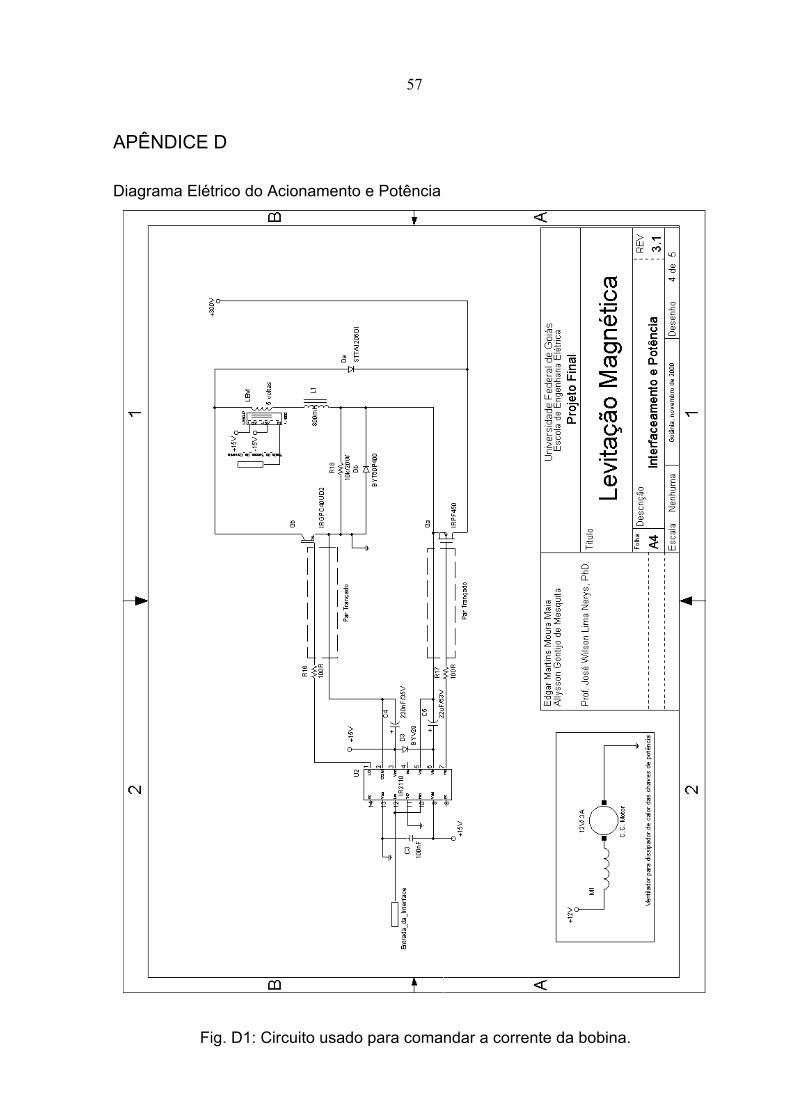
Em adição, uma outra chave de potência (conjuntamente com um diodo de
retorno) é adequadamente colocada no circuito. Assim, a corrente também pode ser
retirada mais rapidamente, pela inversão de polaridade proporcionada pela
configuração das chaves de potência e diodos de retorno. A Fig. 5.3 é uma melhor
disposição de parte do circuito do APÊNDICE D, e ilustra a descrição deste
parágrafo. Facilmente observa-se que a corrente através da bobina (fonte de campo
46
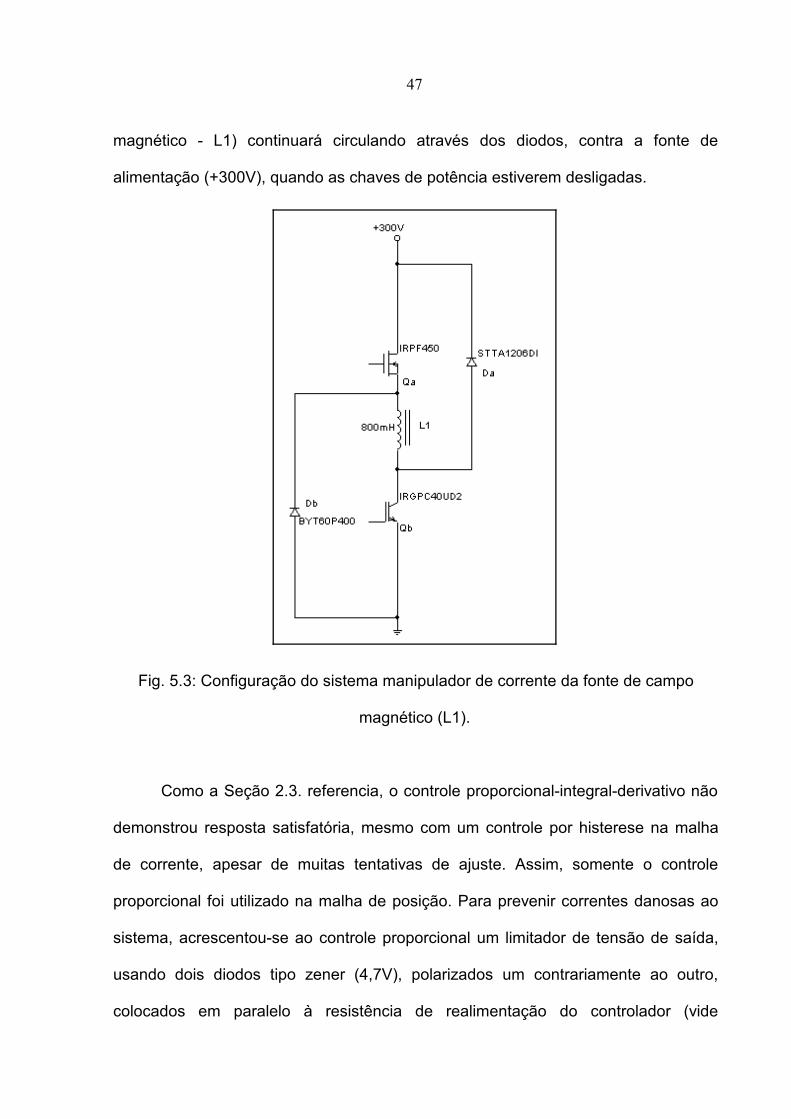
magnético - L1) continuará circulando através dos diodos, contra a fonte de
alimentação (+300V), quando as chaves de potência estiverem desligadas.
Fig. 5.3: Configuração do sistema manipulador de corrente da fonte de campo
magnético (L1).
Como a Seção 2.3. referencia, o controle proporcional-integral-derivativo não
demonstrou resposta satisfatória, mesmo com um controle por histerese na malha
de corrente, apesar de muitas tentativas de ajuste. Assim, somente o controle
proporcional foi utilizado na malha de posição. Para prevenir correntes danosas ao
sistema, acrescentou-se ao controle proporcional um limitador de tensão de saída,
usando dois diodos tipo zener (4,7V), polarizados um contrariamente ao outro,
colocados em paralelo à resistência de realimentação do controlador (vide
47
APÊNDICE B). Assim, quando a maior corrente possível for requerida (erro de
posicionamento com valor negativo máximo) a operação dos diodos limitam a saída
do proporcional em quatro volts e sete décimos (4,7V), o que pela relação
estabelecida no sensor de corrente (0,5V/A), conduz a aplicação de uma corrente de
nove ampères e quatro décimos (9,4A), e não quinze ampères, que ocorreria sem o
limitador, ou trinta ampères, em caso de falha envolvendo saturação do amplificador
operacional (gerando saída de quinze volts), sendo além de danosa, inútil, pois a
saturação observada no modelamento ocorre a partir de quinze (15) ampères (cf.
Seção 3.5). Esta limitação, entretanto, confina a obtenção do equilíbrio entre força
magnética e força peso em uma faixa de distância pouco menor que o diâmetro da
esfera padrão (c. 3cm).
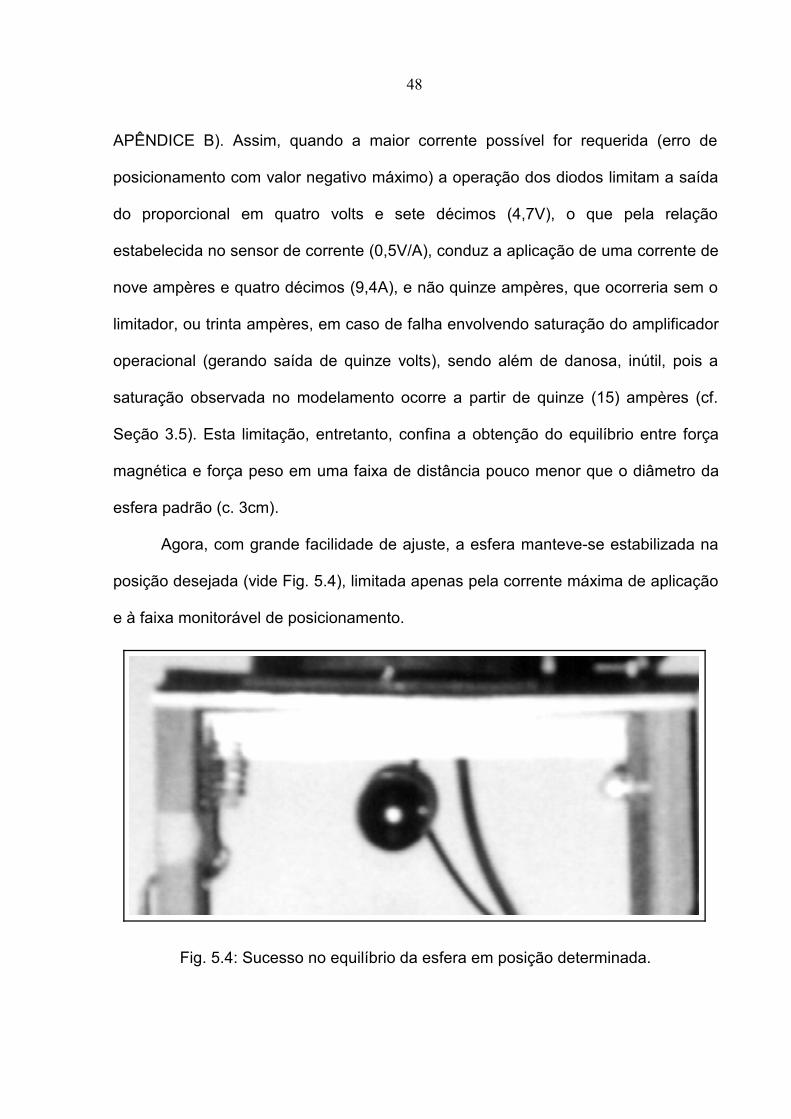
Agora, com grande facilidade de ajuste, a esfera manteve-se estabilizada na
posição desejada (vide Fig. 5.4), limitada apenas pela corrente máxima de aplicação
e à faixa monitorável de posicionamento.
Fig. 5.4: Sucesso no equilíbrio da esfera em posição determinada.
48

Uma visão mais ampla, mostrando a área de experimentos e seus
componentes, juntamente com a levitação em processo, é dada pela Fig. 5.5.
Fig. 5.5: Panorama da área de experimentos.
Sendo alcançado o objetivo, outros objetos ferromagnéticos foram postos na
tentativa de substituir à esfera usada e generalizar o sistema. Esferas menores,
agrupamento de esferas, um núcleo laminado - com todos o sistema obteve êxito em
equilibrar força peso e força magnética, estabilizando-os em posição definida. A Fig.
5.6 registra estas variações.
a) b)
Fig. 5.6: Demonstração com outros objetos ferromagnéticos: (a) Duas esferas
simultaneamente; (b) Um núcleo de ferro laminado.
49

O esquema do circuito final é apresentado nos Apêndices (APÊNDICE A - E).
Ainda no sentido de melhorar a estabilidade por redução de interferências, e
garantir que o sistema permaneça funcionando por um tempo razoável, foi todo
montado em circuito impresso. Cabos blindados foram acrescidos à montagem
definitiva29. A Fig. 5.7 apresenta o circuito montado em base de madeira, já dotado
de conectores. Da montagem final, surgiu a necessidade de um ventilador para
forçar a circulação de ar entre as aletas do dissipador de calor, pois sua disposição
na placa dificultou troca de calor. O sistema foi modularizado, tendo a parte da fonte
de alimentação/chaves de potência e controle/acionamento em placas distintas,
interconectadas por terminais removíveis, facilitando a mudança do sistema de
controle e acionamento, na ocasião de melhorias.
Fig. 5.7: O circuito montado em placa:
Vista superior-frontal, e; Vista superior-lateral, respectivamente.
50
29O orientador, Prof. José Wilson Lima Nerys, Ph.D., comentou futuras alterações estéticas eelétricas, tais como: colocação em acrílico; modificação dos materiais de construção daestrutura experimental; acréscimo de controle integral à malha de posição, entre outras idéias.

Com a finalidade de apresentar esta modularização e ressaltar componentes
da conjunto definitivo, uma panorâmica da montagem final é mostrada na
setorização da Fig. 5.8.
Fig. 5.8: A montagem final setorizada (Vista superior-frontal).
51
6. Conclusões
Apesar da extrema complexidade dos eventos que envolvem o
eletromagnetismo, conforme efetivamente observado no equacionamento da planta,
e já anteriormente notado através da teoria apresentada neste trabalho, o projeto
aqui desenvolvido prova que existe um sistema de controle analógico, não
complexo, que mostre-se notavelmente eficiente no ato de simplificar a manipulação
daqueles eventos.
O relativo equilíbrio entre duas forças de origens diferentes, sendo uma delas
portadora de comportamentos não-lineares, dependente de fatores na sua maior
parte desconhecidos e ainda imprevisíveis, é conseguido por um sistema composto
de dispositivos de mercado, sendo a parte significativamente mais onerosa residente
na alta tensão/corrente, o que era esperado.
Este sistema de controle também possibilita a quase extinção da dependência
do equilíbrio entre estas diferentes forças, frente a objetos fora do padrão que iniciou
o estudo (esfera de 112 gramas e 1,25 polegadas de diâmetro), pois sem
modificação de valores de controle, o equilíbrio com estes outros objetos foi
conseguido com êxito. O sistema só encontra seu limite de capacidade no sensor de
posicionamento - que reflete na forma da região do espaço monitorada e no formato
do objeto que não causa conflitos na percepção do sensor; e na máxima corrente de
alimentação - que reflete na intensidade da força magnética e, portanto, no peso
máximo do objeto.
É necessário salientar a vulnerabilidade a ruídos, pois o envolvimento de
freqüências/correntes relativamente altas no acionamento e valores de tensão
baixos no sensor de posicionamento provoca discrepâncias nos sinais do
52

controlador, desfazendo rapidamente o equilíbrio. Uma conveniente blindagem
eletromagnética dos condutores, e a montagem em circuito impresso, foram
capazes de sanar parte destas interferências. Entretanto, não só ruídos elétricos
causam interferências; ruídos mecânicos (e.g. trepidação da mesa) também podem
romper o equílibrio entre forças peso e magnética.
Melhorias no sensor de posicionamento, com acréscimo de fototransistores e
redução do espaçamento entre os mesmos, com intercalação; a adoção de detecção
por infravermelho, com compensação da radiação ambiente; ou ainda a utilização de
uma lógica mais aprimorada para evitar conflitos na monitoração; a utilização de um
núcleo com propriedades magnéticas mais convenientes, manifestariam-se
significativamente no equilíbrio e versatilidade do sistema. Em adição, ampliações
na capacidade de corrente aumentariam a distância de funcionamento e a
capacidade para suspensão de massas mais elevadas.
53
APÊNDICE A
Diagrama Elétrico do Sensor
54
Fig. A1: Circuito usado no sensor de posicionamento.
APÊNDICE B
Diagrama Elétrico do Somador / Controlador Proporcional
55
Fig. B1: Circuito que compõe o somador (erro de posição) e o controladorproporcional.
APÊNDICE C
Diagrama Elétrico do Comparador Operando com Histerese
56
Fig. C1: Circuito usado no controle por histerese.
APÊNDICE D
Diagrama Elétrico do Acionamento e Potência
57
Fig. D1: Circuito usado para comandar a corrente da bobina.
APÊNDICE E
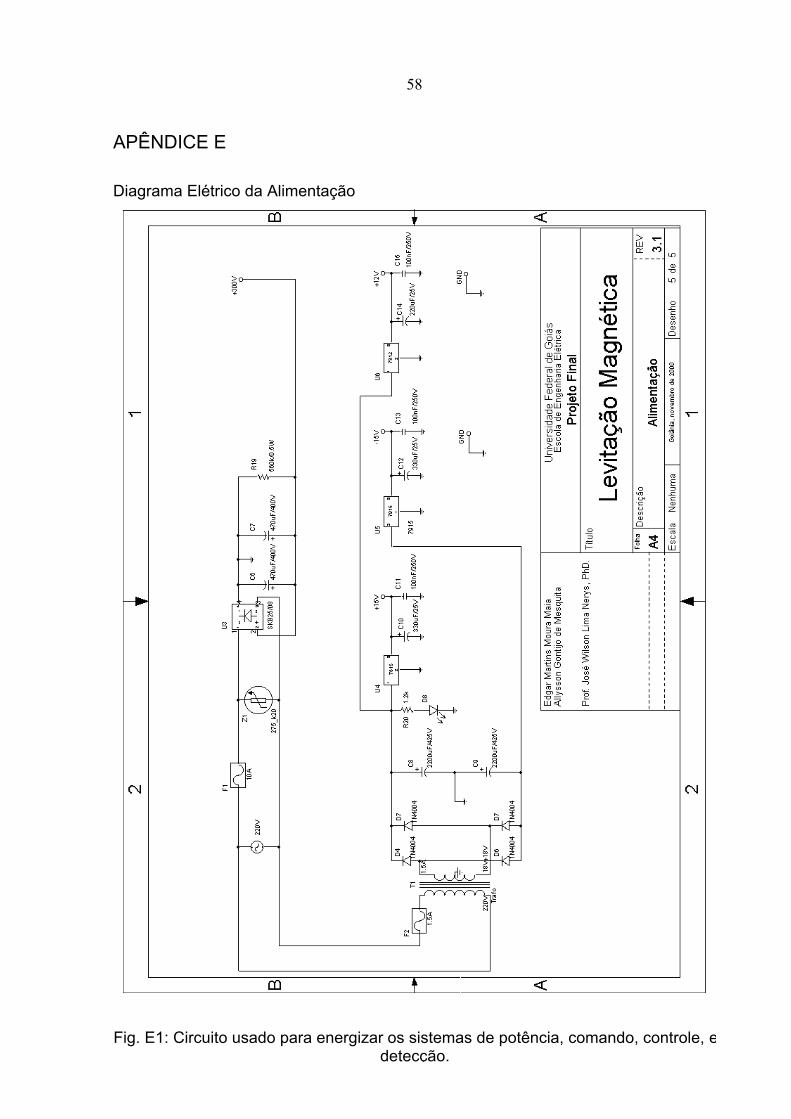
Diagrama Elétrico da Alimentação
58
Fig. E1: Circuito usado para energizar os sistemas de potência, comando, controle, edetecção.

APÊNDICE F
Lista de Componentes Utilizados na Confecção do Circuito.
Tab. F1: Lista de componentes necessários.
1 (um)Entrada: 220VSaída: 18+18V - 1,5A
Transformador1 (um)275 k20Varistor1 (um)VermelhoLED2 (dois)Diodo Zener, 4,7V1N4733AC4 (quatro)Diodo retificador1N40041 (um)STTA1206DI1 (um)BYT60P4001 (um)DiodoBYV291 (um)MOSFETIRPF4501 (um)IGBTIRGPC40UD2
1 (um)Sensor de corrente,1:1000
LA50-P
1 (um)Regulador de tensão,12V
7812
1 (um)Regulador de tensão,-15V
7915
1 (um)Regulador de tensão,15V
78151 (um)Ponte retificadoraSKB25/08
1 (um)Acionador das chaves depotência.
IR2110
1 (um)Conjunto de quatroAmplificadoresoperacionais.
MC34074P7 (sete)FototransistorTIL781 (uma)12V/5WLâmpada incandescente
1 (uma)Esfera de aço, derolamento de maquináriopesado, com diâmetro de1,25pol.
Esfera
1 (uma) c. 3300 espiras decondutor de cobre com1,5mm2, sobre núcleo deferro laminado17x2x2cm3.
BobinaQuantidadeDescrição/ComplementoComponente
Continua...
59

Tab. F1: Lista de componentes necessários (Continuação).
--Conectores, cabos eoutros.
1 (uma)220V/30AChave liga/desliga
1 (um)Circulação de ar nasaletas do dissipador decalor.
Ventilador
1 (um)Unidade que ligatermicamente chaves depotência, diodos deretorno e ponteretificadora.
Dissipador de calor1 (um)10A1 (um)200mAFusível1 (um)1kΩPotenciômetro1 (um)100kΩ1 (um)5kΩTrimpot1 (um)560kΩ, 1/2W1 (um)330kΩ, 1/8W3 (três)11kΩ, 1/8W1 (um)10kΩ, 20W10 (dez)10kΩ, 1/8W1 (um)1,2kΩ, 1/8W3 (três)1kΩ, 1/8W8 (oito)910Ω, 1/8W3 (três)100Ω, 1/8WResistor2 (dois)2200uF/425V, eletrolítico2 (dois)470uF/400V, eletrolítico2 (dois)330uF/25V, eletrolítico1 (um)220uF/25V, eletrolítico1 (um)22uF/63V, eletrolítico1 (um)220nF/35V, tântalo3 (três)100nF/250V, poliéster3 (três)100nFCapacitorQuantidadeDescrição/ComplementoComponente
60
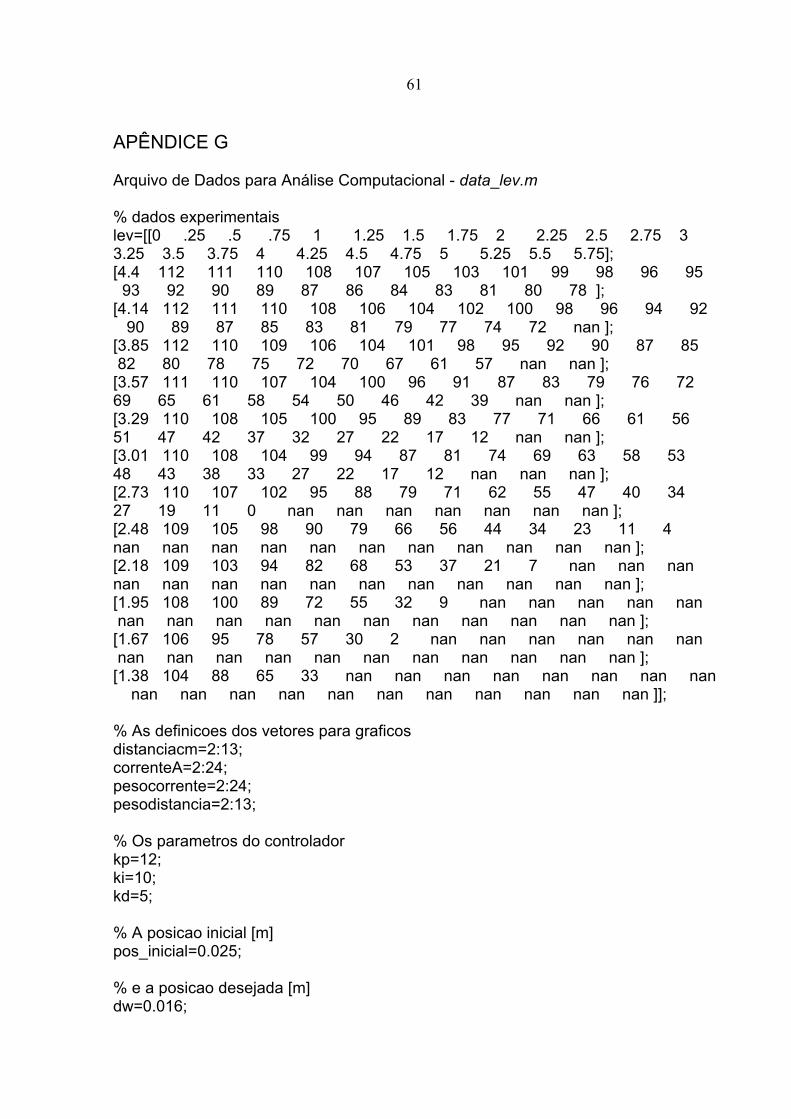
APÊNDICE G
Arquivo de Dados para Análise Computacional - data_lev.m
% dados experimentaislev=[[0 .25 .5 .75 1 1.25 1.5 1.75 2 2.25 2.5 2.75 3 3.25 3.5 3.75 4 4.25 4.5 4.75 5 5.25 5.5 5.75];[4.4 112 111 110 108 107 105 103 101 99 98 96 95 93 92 90 89 87 86 84 83 81 80 78 ];[4.14 112 111 110 108 106 104 102 100 98 96 94 92 90 89 87 85 83 81 79 77 74 72 nan ];[3.85 112 110 109 106 104 101 98 95 92 90 87 85 82 80 78 75 72 70 67 61 57 nan nan ];[3.57 111 110 107 104 100 96 91 87 83 79 76 72 69 65 61 58 54 50 46 42 39 nan nan ];[3.29 110 108 105 100 95 89 83 77 71 66 61 56 51 47 42 37 32 27 22 17 12 nan nan ];[3.01 110 108 104 99 94 87 81 74 69 63 58 53 48 43 38 33 27 22 17 12 nan nan nan ];[2.73 110 107 102 95 88 79 71 62 55 47 40 34 27 19 11 0 nan nan nan nan nan nan nan ];[2.48 109 105 98 90 79 66 56 44 34 23 11 4 nan nan nan nan nan nan nan nan nan nan nan ];[2.18 109 103 94 82 68 53 37 21 7 nan nan nan nan nan nan nan nan nan nan nan nan nan nan ];[1.95 108 100 89 72 55 32 9 nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan ];[1.67 106 95 78 57 30 2 nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan ];[1.38 104 88 65 33 nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan nan ]];
% As definicoes dos vetores para graficosdistanciacm=2:13;correnteA=2:24;pesocorrente=2:24;pesodistancia=2:13;
% Os parametros do controladorkp=12;ki=10;kd=5;
% A posicao inicial [m]pos_inicial=0.025;
% e a posicao desejada [m]dw=0.016;
61
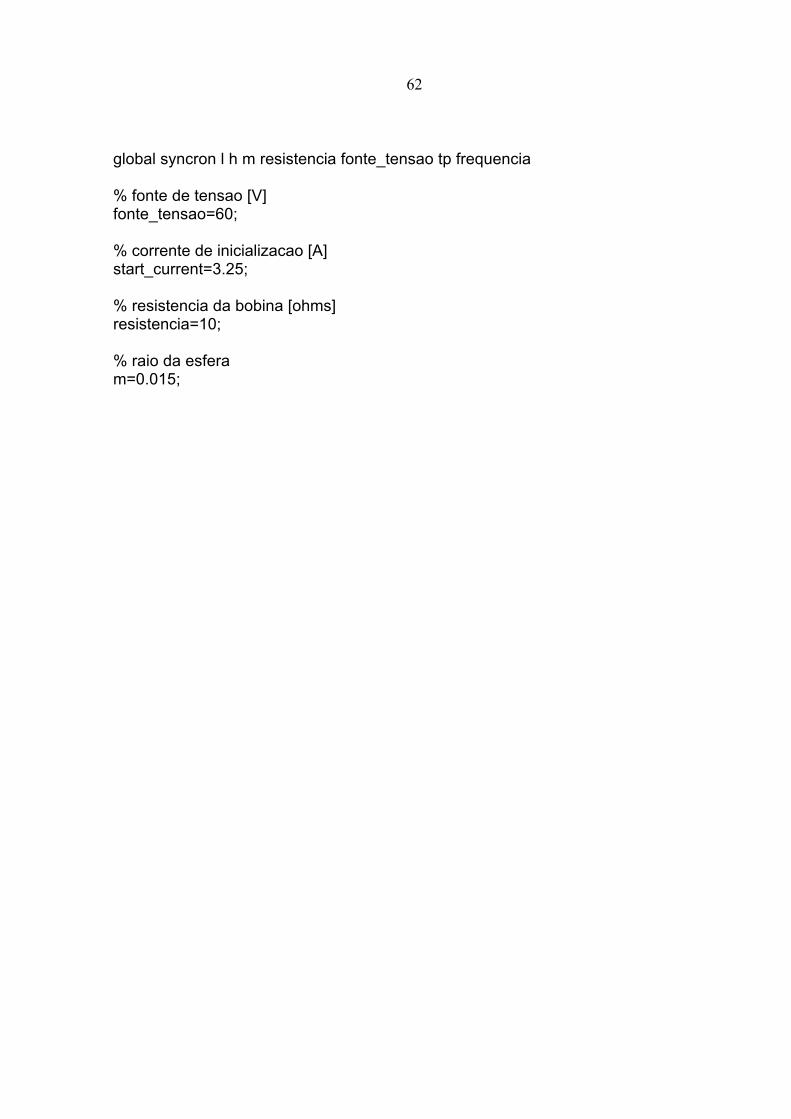
global syncron l h m resistencia fonte_tensao tp frequencia
% fonte de tensao [V]fonte_tensao=60;
% corrente de inicializacao [A]start_current=3.25;
% resistencia da bobina [ohms]resistencia=10;
% raio da esferam=0.015;
62

APÊNDICE H
Arquivo de Comandos para Relacionar os Dados Experimentais com uma FunçãoMatemática - equation.m
global a p q r
% Valores de massa virtual estao em data_lev.mdata_lev;
% Calculando 'a' e 'b', para todas as curvas de corrente constante...% A funcao eh exp(a*d+b), onde 'd' eh a distancia.
for i=2:24, dd=2; for d=2:13, if ~isnan(lev(d,i)) data(d-1)=lev(d,i); if data(d-1)==112 % Valores que produzirao zero no argumento do logaritmo sao
% rejeitados. dd=d+1; end end end if size(data,2)>=2 aandb(i-1,:)=polyfit(lev(dd:size(data,2)+1,1)',log((112-data(1,dd-1:size(data,2))).^(-1)),1); end clear data; clear dd;end
% Valores de 'a' e 'b'...% aandb
% entendendo a variacao de 'b' como funcao da corrente...% b(I)=-exp(r)*I^(p*log(I)+q)bfun=polyfit(log(.5:.25:5),log(-aandb(2:20,2)'),2);
% fazendo 'a' o valor medio...a=median(aandb(:,1));
% Parametros da funcao 'b'...p=bfun(1);q=bfun(2);r=bfun(3);
63

% A funcao completa usada eh...% massa virtual = exp(a*d)*exp(exp(r)*I^(p*log(I)+q)) [g, cm, A]
64

APÊNDICE I
Arquivo de Comandos para Traçar Algumas Curvas - fd_c.m
figure;hold on;
for i=2:24, plot(lev(distanciacm,1),112-lev(pesodistancia,i));endplot(lev(distanciacm,1),112*ones(size(lev(distanciacm,1))));title('Forca x distancia [g-f; cm]');
figure;hold on;
for i=2:13, plot(lev(1,correnteA),112-lev(i,pesocorrente));endplot(lev(1,correnteA),112*ones(size(lev(1,correnteA))));title('Forca x corrente [g-f; A]');
figure;hold on;
for i=2:24, plot(lev(distanciacm,1),log((112-lev(pesodistancia,i)).^(-1)));end
for i=2:24, dd=2; for d=2:13, if ~isnan(lev(d,i)) data(d-1)=lev(d,i); if data(d-1)==112 dd=d+1; end end end if size(data,2)>=2 aandb(i-1,:)=polyfit(lev(dd:size(data,2)+1,1)',log((112-data(1,dd-1:size(data,2))).^(-1)),1); end clear data; clear dd;end
65

aandb
d=0:.1:5;
d=1.38:.1:4.5;
figure;hold on;plot(log(.5:.25:5),log(-aandb(2:20,2)),'y+');
bfun=polyfit(log(.5:.25:5),log(-aandb(2:20,2)'),2);
c=.01:.1:5;plot(log(c),bfun(1)*log(c).^2+bfun(2)*log(c)+bfun(3),'c');
figure;hold on;c=.0001:1:50;plot((c),-c.^(log(c.^bfun(1))+bfun(2))*exp(bfun(3)),'c');
a=median(aandb(:,1))p=bfun(1)q=bfun(2)r=bfun(3)
figure;hold on;
for i=2:3:24, plot(lev(distanciacm,1),9.8*(112-lev(pesodistancia,i))/1000,'y'); plot(d,9.8/1000*(exp(a*d-exp(r)*lev(1,i).^(log(lev(1,i).^p)+q))).^(-1),'c');endaxis([1.25 4.75 0 1.10]);title('Forca x distancia [N;cm]')
figure;hold on;
for i=2:3:24, plot(lev(distanciacm,1),log(9.8/1000*(112-lev(pesodistancia,i))),'y'); plot(d,log(9.8/1000*(exp(a*d-exp(r)*lev(1,i).^(log(lev(1,i).^p)+q))).^(-1)),'c');endtitle('log(Forca) x distancia [cm]')
clear aandb;
figure;hold on;
66

d=0:.1:6;for i=0:1:10, plot(d,-112+(exp(a*d-exp(r)*i.^(log(i.^p)+q))).^(-1),'w');endplot(d,112*ones(size(d)),'m-');axis([0 6 -112 20]);title('g-f x distancia [g-f;cm]')text(4,15,'corrente: 0:1:10A');
figure;hold on;
i=0:.1:6;for d=0:.5:6, plot(i,-112+(exp(a*d-exp(r)*i.^(log(i.^p)+q))).^(-1),'w');endplot(i,112*ones(size(i)),'m-');axis([0 6 -112 20]);title('g-f x Corrente [g-f;A]')text(3,-125,'distancia: 0:.5:6cm');
67
Referências Bibliográficas
1. REITZ, J. R. e outros, Fundamentos da Teoria Eletromagnética - 3 ed., Rio de Janeiro,
Campus, 1982. p. 161-258.
2. MATSCH, L. W., Máquinas Electromecánicas y Electromagnéticas - 1 ed., México,
Representaciones y Servicios de Ingeniería, SA, 1974. p. 1-75.
3. NASAR, S. A.; UNNEWEHR, L. E., Electromecánica y Máquinas Eléctricas - 1 ed.,
México, Editorial Limusa, SA, 1982. p. 35-77.
4. HAYT Jr., W. H., Eletromagnetismo - 3 ed., Rio de Janeiro, Livros Técnicos e Científicos
Editora S.A., 1985. p. 183-264.
5. MOHAN, N. e outros. Power Electronics - 2 ed., New York, John Wiley & Sons, Inc,
1990. p. 25-30, s744-789.
6. PERTENCE Jr., A., Amplificadores Operacionais e Filtros Ativos - 4 ed., São Paulo,
McGraw-Hill, 1988. 359 p.
7. BENTO, C. R., Sistemas de Controle - 10 ed., São Paulo, Érica, 1988. p. 100-127.
8. DiSTEFANO, J. J. e outros, Sistemas de Retroação e Controle - São Paulo, McGraw-Hill
do Brasil, 1972. p. 1-14.
9. RASHID, M. H., Power Electronics - 2 ed., New Jersey, Prentice-Hall International, Inc.,
1993. p. 280-288.
68
Índice Remissivo
2
2110, 17, 37, 45
B
balança eletrônica, 21, 23bobina, 19
C
Cabos blindados, 51campo magnético estacionário, 3campo magnético, H, 4Características magnéticas, 20chave de potência, 47ciclo de histerese, 8circuito impresso, 51Conclusões, 54constantes do controlador, 39Controlador, 36controlador derivativo, 13controlador integral, 12controlador proporcional, 12controlador proporcional-integral-derivativo, 13, 36controlador proporcional-integral-derivativo (PID), 12controle analógico, 11controle por histerese, 12, 15, 37, 46controle proporcional, 12corrente, 46
D
densidade de fluxo magnético, B, 4deslocamento na força magnética, 27diâmetro, 21diodo de retorno, 47diodos tipo zener, 48discretização, 44distância, 24domínios, 7
E
efeito Hall, 15, 46
69
equilíbrio, 50equílibrio, 55Esfera, 34Estabilidade, 39
F
Faraday, 1fluxo magnético, F, 5Fonte de Campo Magnético, 19, 23, 32Fonte de Força Magnética, 32força, 24força de Lorentz, 6força magnética, 24fototransistor, 21, 44função logarítmica, 24
G
Gauss, 1
H
Henry, 1histerese, 7, 36
I
indutância, 5Interfaceamento, 37interferências, 51interpolação, 27IR2110, 18
L
lâmpada incandescente, 44Lei Circuital de Ampère, 4Lei de Ampère, 4Lei de Biot-Savart, 3Lei de Faraday, 9Lei de Lenz, 9levitação, 1logaritmo, 24
M
MagLev, 2magnetita, 1, ii, 61massa, 21, 23Matlab, 24Matlab/Simulink, 32Maxwell, 5
70

Melhorias, 55modulação em largura de pulsos (Pulse Width Modulation - PWM), 45momento eletrônico de spin, 7Movimento, 34
N
núcleo laminado, 19
O
Oersted, 1
P
perdas por histerese, 9planta do sistema, 36programação, 27
R
realimentação, 1relutância, 9resistor fotossensível (LDR), 44Resultados, 44ruídos, 54ruídos elétricos, 55ruídos mecânicos, 55
S
saturação, 29, 49sensor, 45sensor de posicionamento, 54somador inversor, 15
T
transformada de Laplace, 12transistor bipolar de porta isolada (Insulated Gate Bipolar Transistor - IGBT), 17transistor de efeito de campo de porta isolada por óxido metálico(Metal-Oxide-Semiconductor Field-Effect Transistor - MOSFET), 17
71
Este documento foi composto no editor de textoLotus Word Pro Edição 97 para Windows, da Lotus Development Corporation.
Procedeu-se a tradução para o formatoMS Word para Windows 95, versão 7.0,
e subseqüente atualização e correções noMicrosoft Word 97, da Microsoft Corporation.
As figuras foram editadas através doMicrosoft Paint para Windows 98 e do
PhotoImpact, versão 4.0, da Ulead Systems, Inc.As imagens foram digitalizadas utilizando o
TWAIN-compliant Scanner Controller for Windows, versão 2.46, da MicrotekInternational Inc.
Os esquemas dos circuitos foram editados noMicroSim Schematics, Evaluation Version 8.0, da MicroSim Corporation.
A análise computacional foi efetuada noMatlab, versão 5.3 (R11) e Simulink, versão 3.0 (R11), da The MathWorks, Inc.
72

![Levitação magnética - ifi.unicamp.brlunazzi/F530_F590_F690_F809_F895/F809/... · propriedades magnéticas da matéria [1,2]. Levitação é um fenômeno intrigante que desperta](https://cdn.vdocuments.pub/doc/165x107/5c61ef7a09d3f269088b708a/levitacao-magnetica-ifi-lunazzif530f590f690f809f895f809-propriedades.jpg)





