.
1
I.2.10. Controlul pasului
În unele cazuri este necesară pentru obţinerea unei erori date folosirea unui pas variabil în rezolvarea numerică. Metodele numerice care folosesc un pas variabil se numesc metode adaptive. Pentru controlul pasului vom folosi metodele imbricate descrise anterior. Fie o metodă numerică unipas de ordin ( )nhO de forma:
( ) 1...,,2,1,,,1 −=+=+ �ihythyy iiii φ (I.93)
ataşată unei probleme cu valori iniţiale:
=
≤≤=
ayay
btaytfty
)(~),~,()('~
.
2
Se pune problema găsirii unui număr minim de noduri � şi a unei grile
variabile { } 1,1 −= �iih astfel încât pentru o toleranţă dată 0>ε eroarea globală
( ) ii yty −~ să nu depăşească această eroare.
Pentru estimarea erorii considerăm o nouă metodă similară cu prima (de
exemplu ambele metode sunt de tip Runge-Kutta) dar de ordin de
exactitate ( )1+nhO :
( ) 1...,,2,1,,, ***1
* −=+=+ �ihythyy iiii φ (I.94)
O estimare a erorii este dată de (I.91)
( ) ( ) ( )[ ]hythyth
hytrp
,,,,1
,, **φφ −= (I.91)
.
3
iar legătura cu eroarea locală de trunchiere este dată de
( ) ( ) ( ) ( ) ( )11 ,,,,,, ++ +≈+= ppii
ppiiii hOhhytrhOhhythytT τ (I.95)
Dar (I.95) este echivalentă cu
( ) pii hKhytT ≈,, (I.96)
Atunci eroarea locală de trunchiere pentru un nou pas qh poate fi
estimată în modul următor:
( ) ( ) ( ) ( ) ( )
( ) ( )[ ]hythytq
hhytrqhytTqKhqqhKqhytT
iiiip
pii
pii
ppppii
,,,,
,,,,,,
**
(I.91)
(I.95)(I.96)
φφ −=
=≈≈=≈
(I.97)
Dacă impunem ca eroarea lui ( )qhytT ii ,, să fie mărginită de ε atunci din

.
4
(I.97) găsim:
( ) ( )p
ii
p
iiii yy
h
hythytq
1
*
1
** ,,,,
−=
−≤
ε
φφ
ε (I.98)
unde am folosit (I.93) şi (I.94).
De obicei în formula (I.98) se introduce un factor θ (de exemplu 8.0≈θ ),
numit factor de siguranţă, astfel încât:
p
ii yy
hq
1
*
−≤
εθ (I.99)
Pentru a calcula diferenţa ( ) ( )hythyt iiii ,,,, **φφ − se folosesc de obicei
metode imbricate pentru a reduce numărul de evaluări ale funcţiei f . Una
.
5
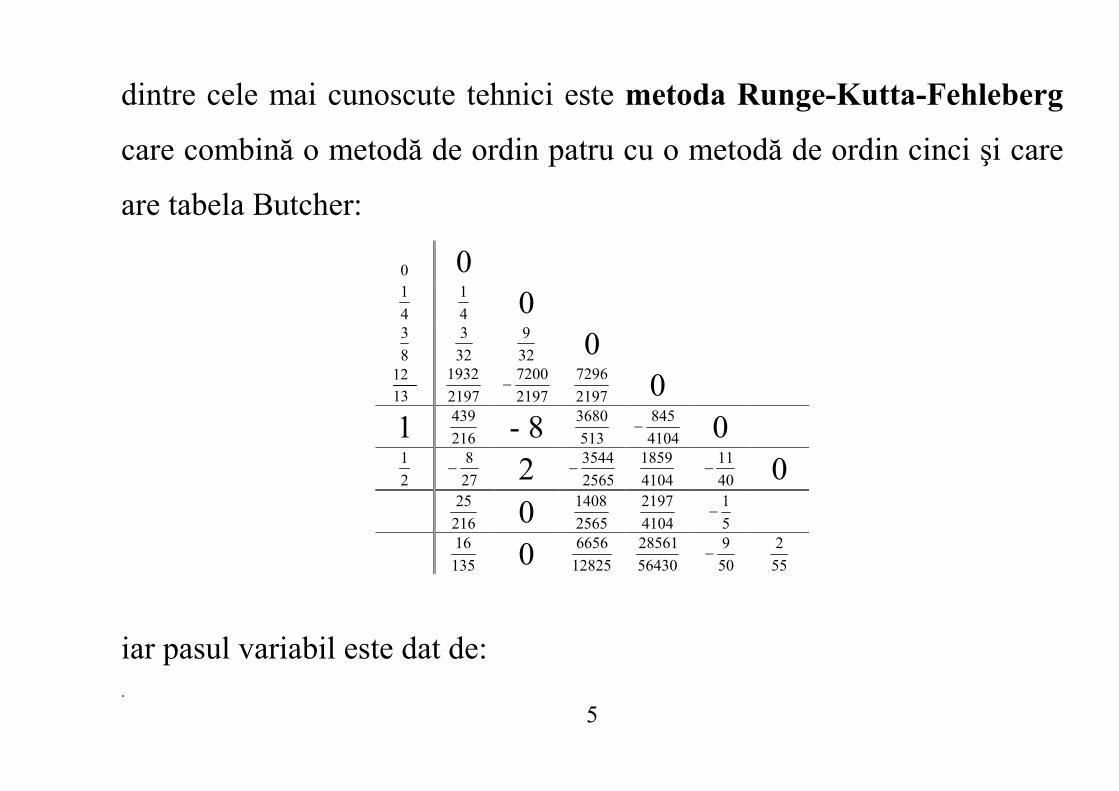
dintre cele mai cunoscute tehnici este metoda Runge-Kutta-Fehleberg
care combină o metodă de ordin patru cu o metodă de ordin cinci şi care
are tabela Butcher:
0 0
4
1 4
1 0
8
3 32
3 32
9 0
13
12 2197
1932 2197
7200−
2197
7296 0 1 216
439 - 8 513
3680 4104
845− 0
2
1 27
8− 2 2565
3544−
4104
1859 40
11− 0
216
25 0 2565
1408 4104
2197 5
1−
135
16 0 12825
6656 56430
28561 50
9−
55
2
iar pasul variabil este dat de:
.
6
4
1
*84.0
−=
ii yy
hq
ε (I.100)
În general asupra paşilor variabili obţinuţi cu (I.100) se mai pune o
condiţie de mărginire de forma maxmin hhh i ≤≤ pentru a evita consumul
prea mare de timp cu calculul în regiunile în care derivata lui f prezintă
neregularităţi şi pentru a evita paşii prea mari care nu ar putea analiza
variaţii locale mai mici .
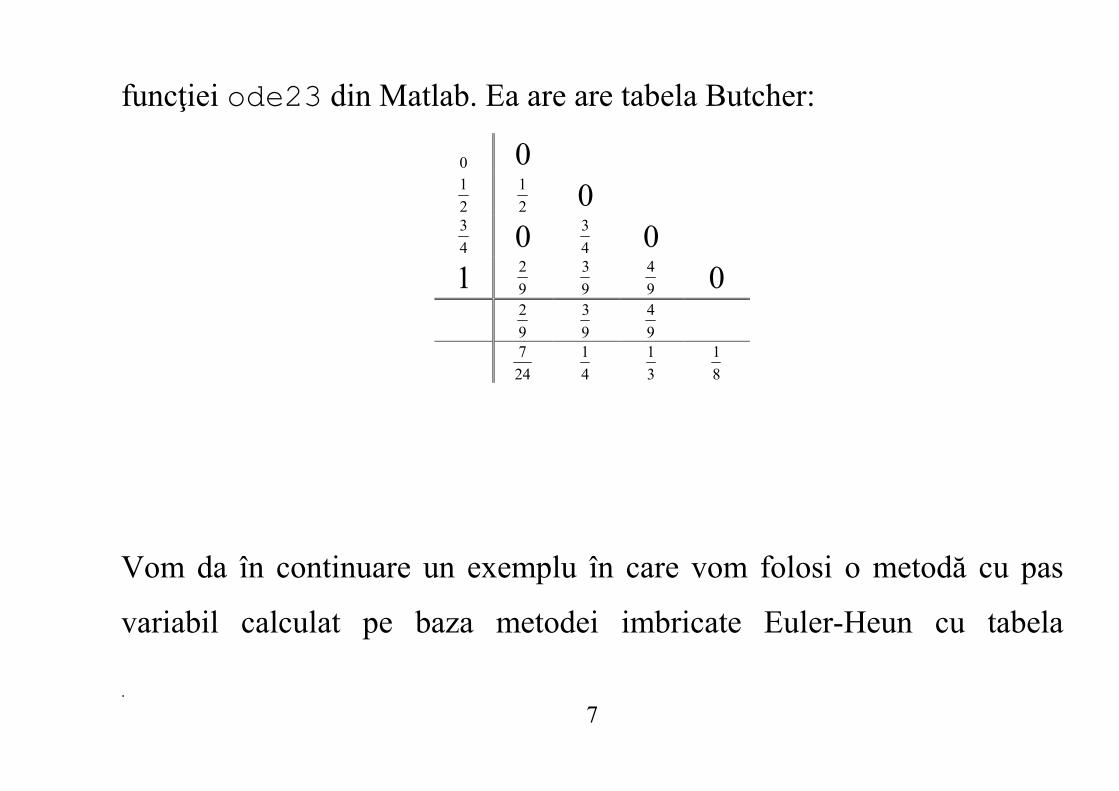
O altă tehnică foarte cunoscută este metoda Bogacki-Shampine ce
combină o metodă de ordinul doi cu o metodă de ordin 3 şi stă la baza
.
7
funcţiei ode23 din Matlab. Ea are are tabela Butcher:
0 0
2
1 2
1 0
4
3 0 4
3 0 1 9
2 9
3 9
4 0 9
2 9
3 9
4 24
7 4
1 3
1 8
1
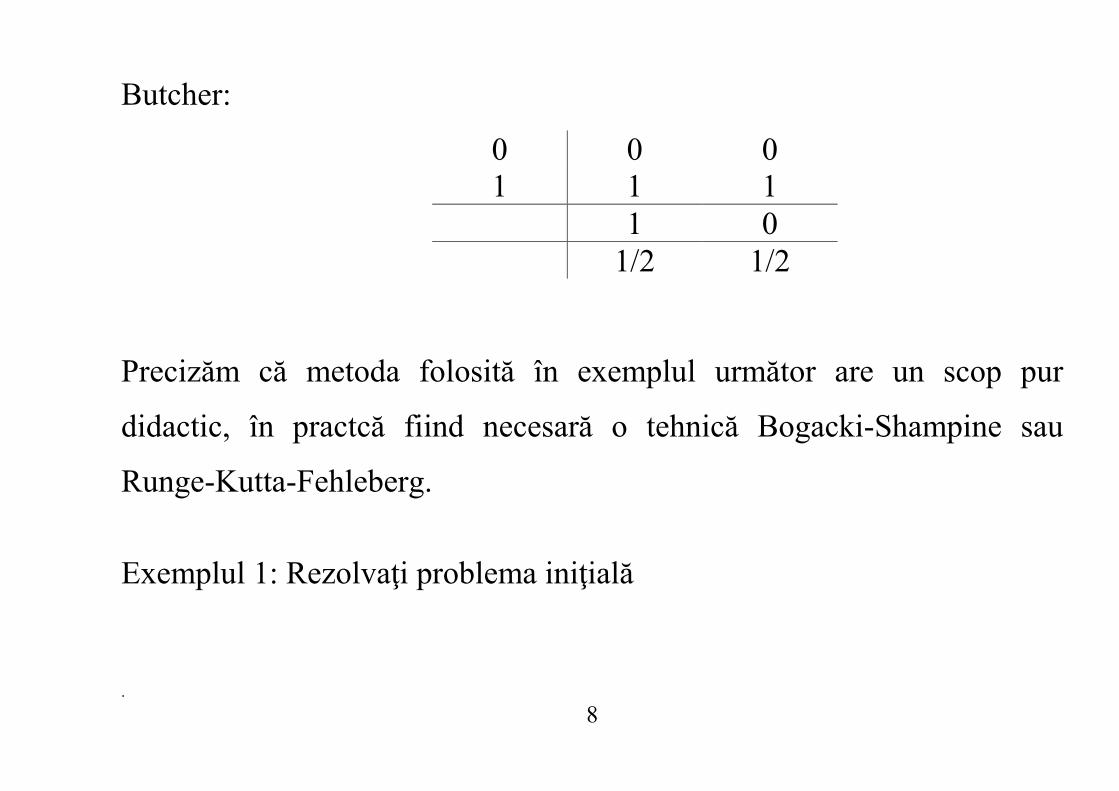
Vom da în continuare un exemplu în care vom folosi o metodă cu pas
variabil calculat pe baza metodei imbricate Euler-Heun cu tabela
.
8
Butcher:
0 0 0 1 1 1 1 0 1/2 1/2
Precizăm că metoda folosită în exemplul următor are un scop pur
didactic, în practcă fiind necesară o tehnică Bogacki-Shampine sau
Runge-Kutta-Fehleberg.
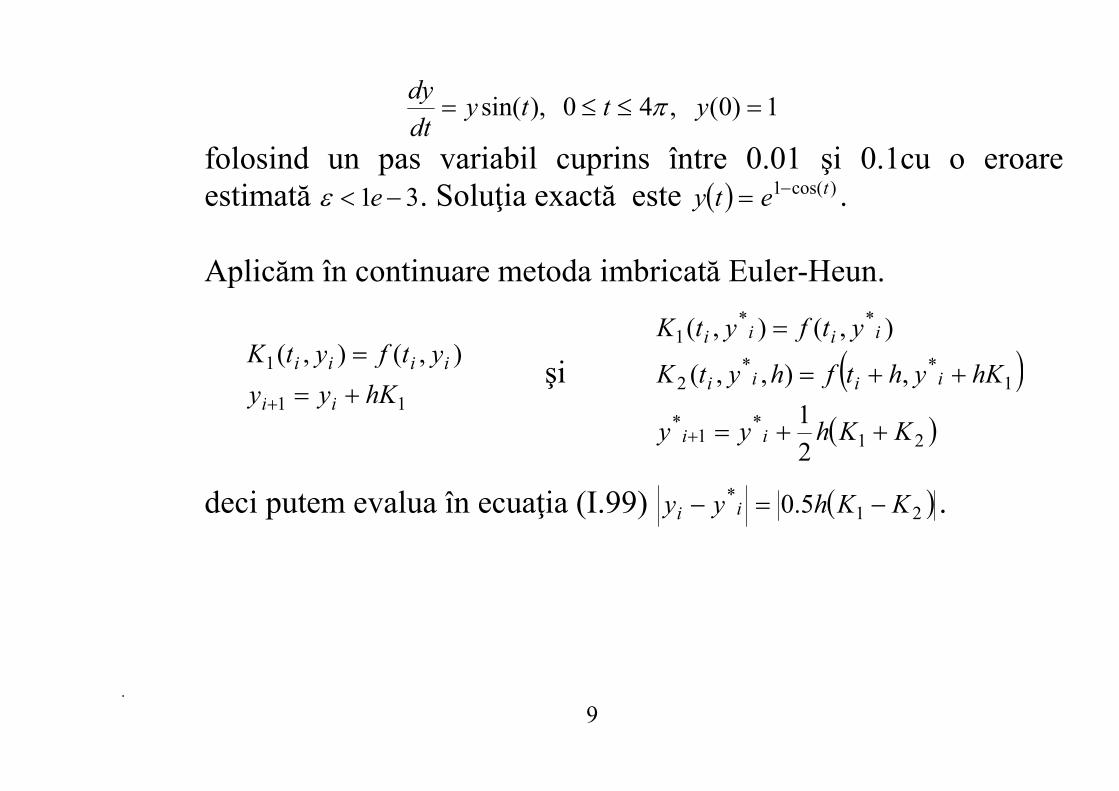
Exemplul 1: Rezolvaţi problema iniţială
.
9
1)0(,40),sin( =≤≤= yttydt
dyπ
folosind un pas variabil cuprins între 0.01 şi 0.1cu o eroare estimată 31 −< eε . Soluţia exactă este ( ) )cos(1 tety −= .
Aplicăm în continuare metoda imbricată Euler-Heun.
11
1 ),(),(
hKyy
ytfytK
ii
iiii
+=
=
+
şi ( )( )21
*1
*
1**
2
**1
2
1
,),,(
),(),(
KKhyy
hKyhtfhytK
ytfytK
ii
iiii
iiii
++=
++=
=
+
deci putem evalua în ecuaţia (I.99) ( )21* 5.0 KKhyy ii −=− .
.
10
În urma aplicării algoritmului s-a obţinut pasul minim, 0.01min =h ,
pasul maxim, 0.1max =h , iar numărul de noduri necesare integrării
este 567=� .
Programul Matlab este:
%exemplu pas variabil Euler-Heun
clear all
format short
a=0;b=2*pi;%capetele intervalului
hmax=0.1;hmin=0.01;
tol=1e-3;
y(1)=1; %conditia initiala
T(1)=a;
i=1;
t=a;
while t<b

.
11
K1=fPasVar(t,y(i));
K2=fPasVar(t+h,y(i));
R=0.5*h*abs(K1-K2);
if R<=tol
T(i+1)=T(i)+h;
y(i+1)=y(i)+0.5*h*(K1+K2);
i=i+1;
t=t+h;
h=hmax;
else
q=0.8*(tol*h/R)^0.25;
h=q*h;
if h<hmin
h=hmin;
end
if h>hmax
h=hmax;
end
end
if(t+h>b)

.
12
h=b-t;
end
end %while
plot(T,y,'.k') %reprezentam grafic solutia numerica
hold on
plot(T,exp(1-cos(T)),'r');
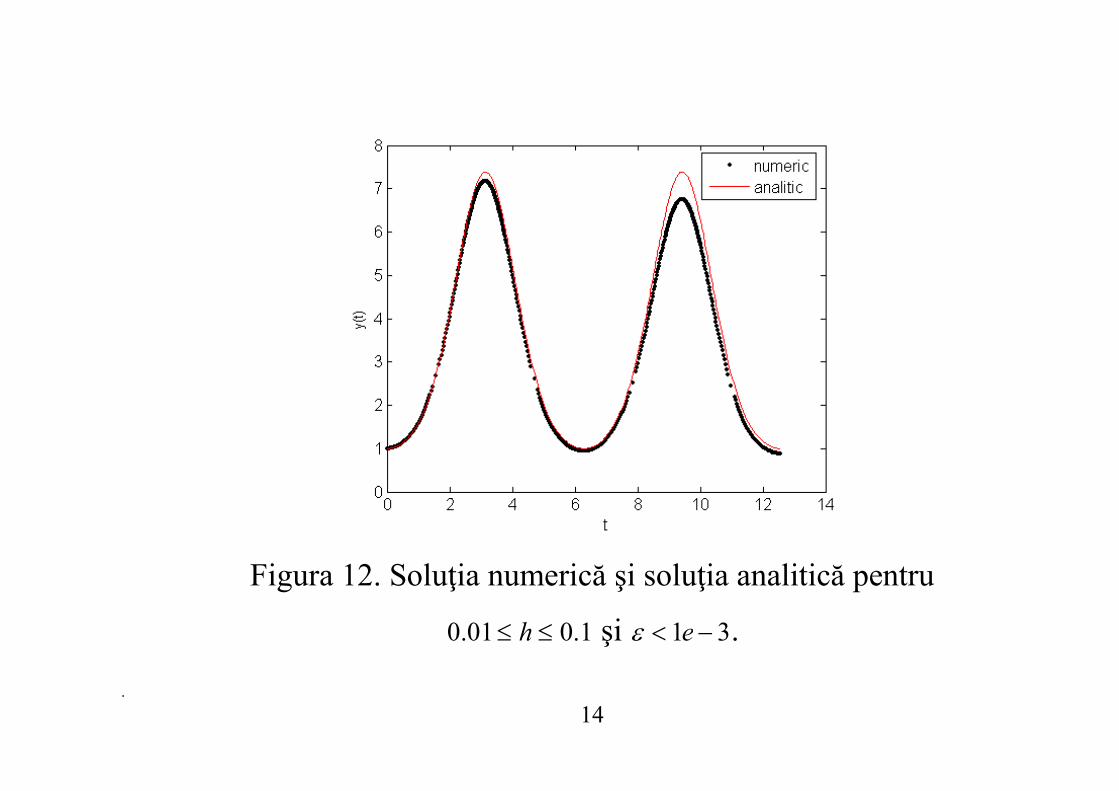
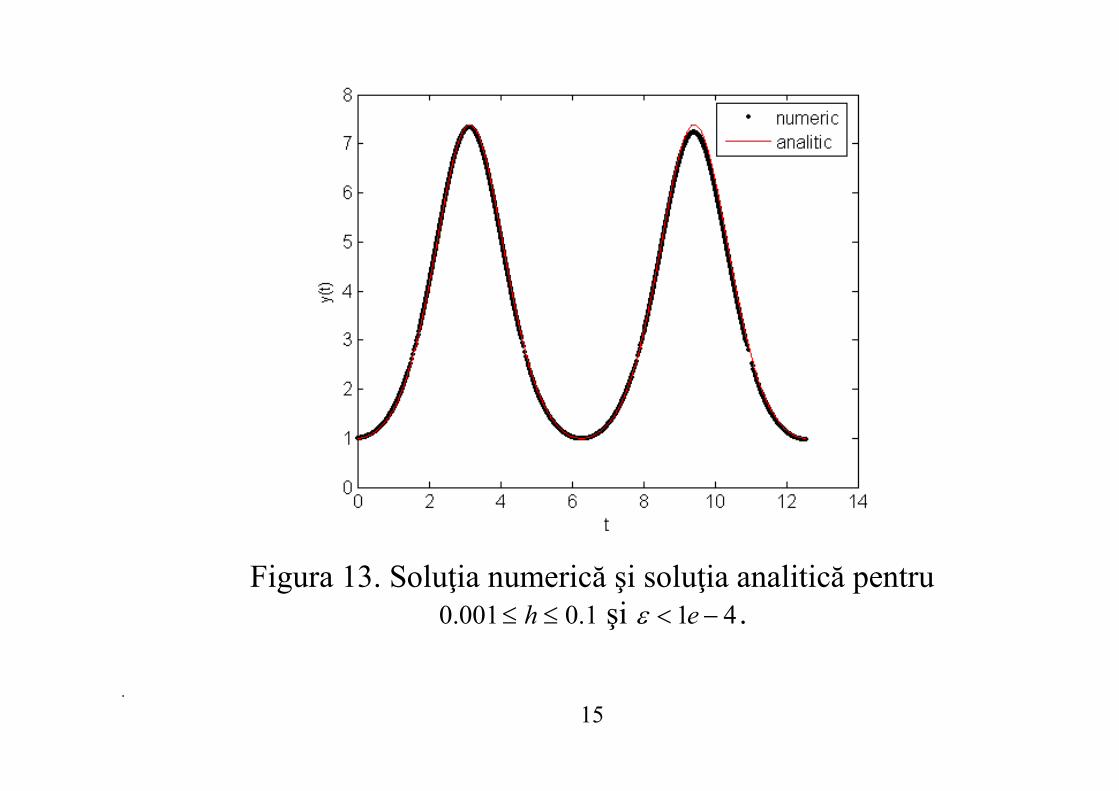
Am rezolvat problema şi pentru pasul cuprins între 0.001 şi 0.1 cu
o eroare estimată 41 −< eε soluţia numerică fiind mult
îmbunătăţită. S-a obţinut 0.0019min =h , 0.0437max =h şi 1736=� .
.
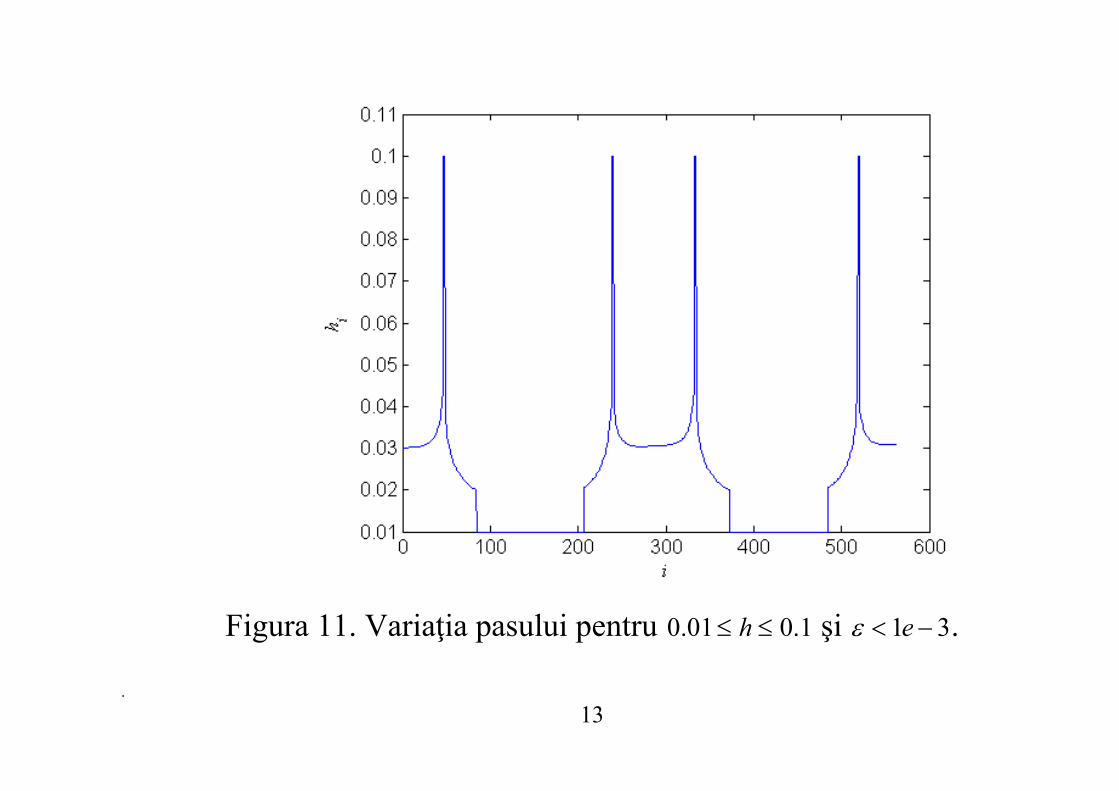
13
Figura 11. Variaţia pasului pentru 1.001.0 ≤≤ h şi 31 −< eε .
.
14
Figura 12. Soluţia numerică şi soluţia analitică pentru
1.001.0 ≤≤ h şi 31 −< eε .
.
15
Figura 13. Soluţia numerică şi soluţia analitică pentru 1.0001.0 ≤≤ h şi 41 −< eε .

.
16
I.2.10. Probleme stiff
.
17
Fie o metodă cu un pas ataşată problemei (I.101) de forma:
(I.101)
(I.101)
(I.101)
(I.101)
(I.103)

.
18
(I.104)
:
(I.105)
(I.106)
.
19
(I.101)
(I.107)
(I.108)
(I.103)
(I.108)
(I.109) (I.102)
.
20
Aproximare Padé
(I.104)
(I.110)
(I.106) (I.110)
:
.
21
(I.111)
(I.112)
(I.112)
:
.
22
:
(I.113)
(I.114)
(I.115)
10: (I.104)
9:

.
23
Metoda implicită a lui Euler
Metoda implicită a lui Euler a fost tratată şi în cursul 1.
(I.116)
(I.117)
(I.101)
(vezi (I.106)) 9
.
24
Metoda implicită a trapezului
(I.118)
(I.119)
(I.101)

.
25
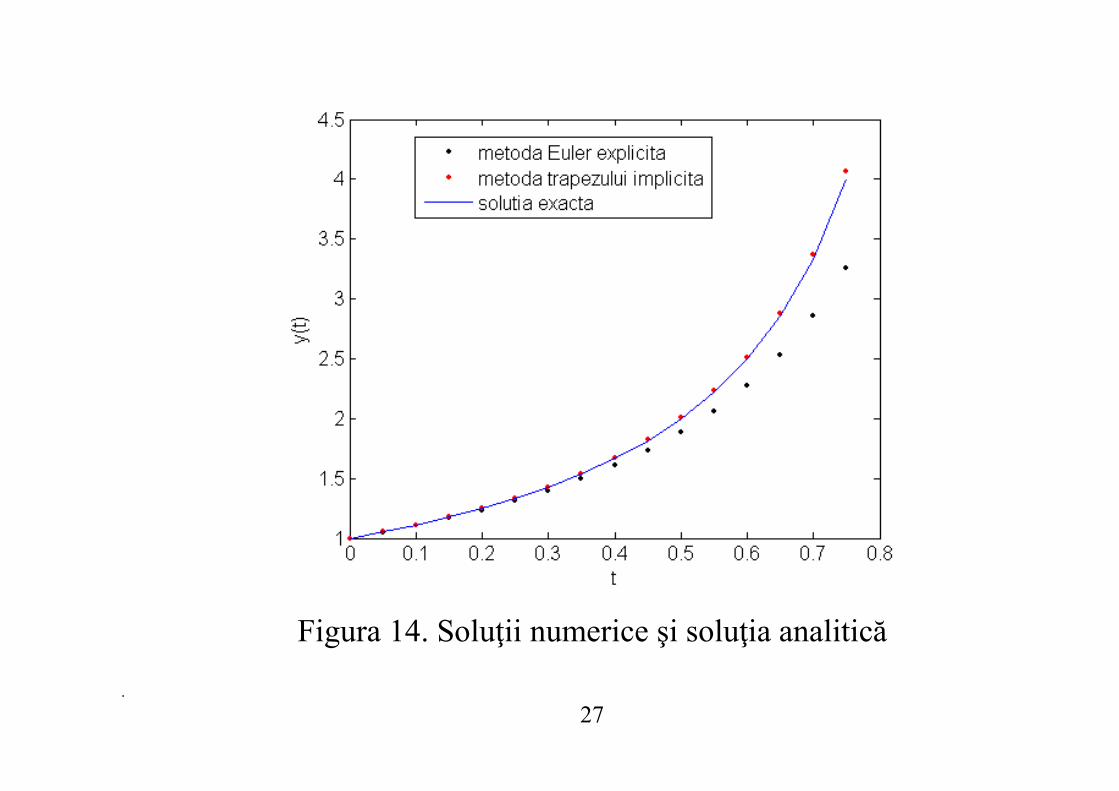
Exemplul 1: Rezolvaţi problema iniţială 1)0(,4/30,2 =≤≤= ytydt
dy .
Soluţia exactă este ( ) )1/(1 tty −= .
Programele Matlab sunt:
%metoda implicita a trpezului
a=0;b=0.75; %capetele intervalului
h=0.05; %pasul retelei
N=round((b-a)/h)+1; %numarul de noduri
ye=zeros(N,1);%initializam vectorul solutie pentru metoda
lui Euler
yt=zeros(N,1);%initializam vectorul solutie pentru
ye(1)=1; yt(1)=1; yex(1)=1; %conditia initiala
t=a:h:b;

.
26
for i=2:N
ye(i)=ye(i-1)+h*ye(i-1)^2; %metoda Euler explicita
yt(i)=fNewt(yt(i-1),yt(i-1),h,1e-5);%metoda trapezului
yex(i)=-1/(t(i)-1); %solutia exacta
end plot(t,y,'.k') %reprezentam grafic solutia numerica(Euler)
hold on
plot(t,yt,'.r')%reprezentam grafic solutia numerica(trapez)
plot(t,yex,'b') %reprezentam grafic solutia exacta
function y1=fNewt(y0,yi,h,tol)
err=1;
y1=y0;
while(err>tol)
y1=y0-ftrap(y0,yi,h)/fptrap(y0,h);
err=abs(y1-y0);
y0=y1;
end
function yp=ftrap(y,yi,h)
yp=y-yi-0.5*h*(yi^2+y^2);
function yp=fptrap(y,h)
yp=1-y*h;
.
27
Figura 14. Soluţii numerice şi soluţia analitică
.
28
Formule Runge-Kutta implicite
O formulă Runge-Kutta implicită cu r stadii are forma:
( ) ( )∑=
=r
siissii hfytKchfyt
1,,,,,,φ (I.120)
rsKahyhtfytKr
jjsjisiiis ,...,2,1,,),(
1=
++= ∑
=µ
Se poate arăta că metoda este de ordinul p, rpr 2≤≤ dacă
[ ]( )dp baCf R×∈ , şi

.
29
Formulele (I.121) şi (I.122) pot fi privite ca nişte formule de cuadratură
(I.121)
(I.122)
(I.121)
(I.121’)
(I.122’)

.
30
Se poate arăta că o formulă Runge-Kutta cu ordinul maxim r2 este A –
stabilă (vezi Trambiţaş şi ceilalţi, 2010).
(I.122’)







