
03-Oct-14
1
ðỘNG LỰC HỌC CHO ROBOT
Th.S Nguyễn Tấn Phúc.Tel: 01267102772.Bộ môn CðT- ðH Nông Lâm Tp.HCM.
BÀI TOÁN ðỘNG HỌC
Nhắc lại bài toán ñộng học:
Xác ñịnh vị trí : biết góc khớp � vị trí khâu cuốiBài toán vận tốc – ma trận Jacobian.
Bài toán ñộng học ngược: vị trí EF � quỹ ñạo góc khớp

03-Oct-14
2
MỤC ðÍCH - PHƯƠNG PHÁP NGHIÊN CỨU ðỘNG LỰC HỌC
Cho mục đích thiết kế , điều khiển robot , cần thiết phải có một mô hình toán học thể hiện
mối quan hệ động lực học tác dụng lên robot .
Cần xây dựng các phương trình vi phân cho chuyển động của robot dựa trên cơ sở các định
luật bảo toàn năng lương cho robot,
Nghiên cứu động lực học nhằm giải quyết bài toán sau cho robot:
Tính toán các lực khớp và các momen tại các góc khớp phát sinh trong quá trình chuyển
động của robot.
Xác định các sai số so với chuyển động đã hoạch định làm cơ sở cho quá trình điều khiển
robot.
NHẮC LẠI CƠ HỌC VẬT RẮN

03-Oct-14
3

03-Oct-14
4
NHẮC LẠI VỀ VECTOR
CÁC VẤN ĐỀ ĐỊNH LUẬT NĂNG LƯỢNG
Động năng: Tịnh tiến
quay
Thế năng

03-Oct-14
5
GIA TỐC CỦA VẬT RẮN:
Định luật bảo toàn năng lượng.
Để lập phương trình chuyển động , ta cần đạo
hàm theo thời gian.

03-Oct-14
6
PHƯƠNG TRÌNH ðỘNG LỰC HỌC LAGRANGE-EULER.
Ví dụ 1: Lập phương trình động lực học cho cơ hệ:
Động năng:
Thế năng
Hàm Lagrange

03-Oct-14
7
Ví dụ 2: Lập phương trình cho cơ hệ bên dưới
Động năng:
Thế năng
Hàm Lagrange2 21 1
2 2L KE PE J Kθ θ
•= − = −
Động năng:
Thế năng
Hàm Lagrange 2 21 1
2 2L KE PE mx kx
•= − = −
Ví dụ 3: Lập phương trình cho cơ hệ bên dưới
03-Oct-14
8
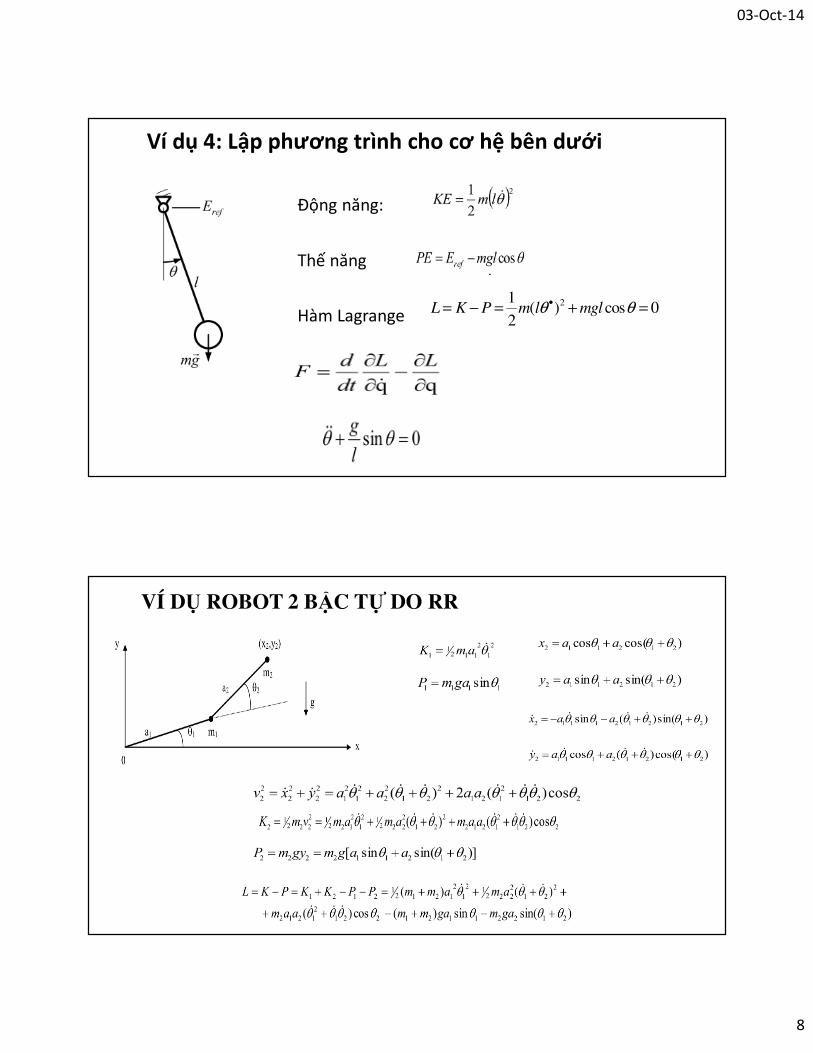
Động năng:
Thế năng
Hàm Lagrange21
( ) cos 02
L K P m l mglθ θ•
= − = + =
Ví dụ 4: Lập phương trình cho cơ hệ bên dưới
VÍ DỤ ROBOT 2 BẬC TỰ DO RR

03-Oct-14
9
PHƯƠNG TRÌNH ĐỘNG LỰC HỌC DẠNG TỔNG QUÁT CỦA 1 ROBOT
Động năng tổng quát:
Thế năng tổng quát

03-Oct-14
10
PHƯƠNG TRÌNH ĐỘNG LỰC HỌC DẠNG TỔNG QUÁT CỦA 1 ROBOT

03-Oct-14
11
BÀI TOÁN ĐỘNG LỰC HỌC NGHIÊN CỨU CÁI GÌ ?
2 DẠNG BÀI TOÁN ðỘNG LỰC HỌC

03-Oct-14
12
PHƯƠNG TRÌNH ðỘNG LỰC HỌC CHO CARTESIAN ROBOT
..
..
..
1 2 3 0 0 0 1
0 2 3 0 ( 2 3) 2
0 0 3 0 3
xm m m F
m m y m m g F
m Fz
+ +
+ + + =
PHƯƠNG TRÌNH ðỘNG LỰC HỌC CỦA CARTESIAN ROBOT

03-Oct-14
13
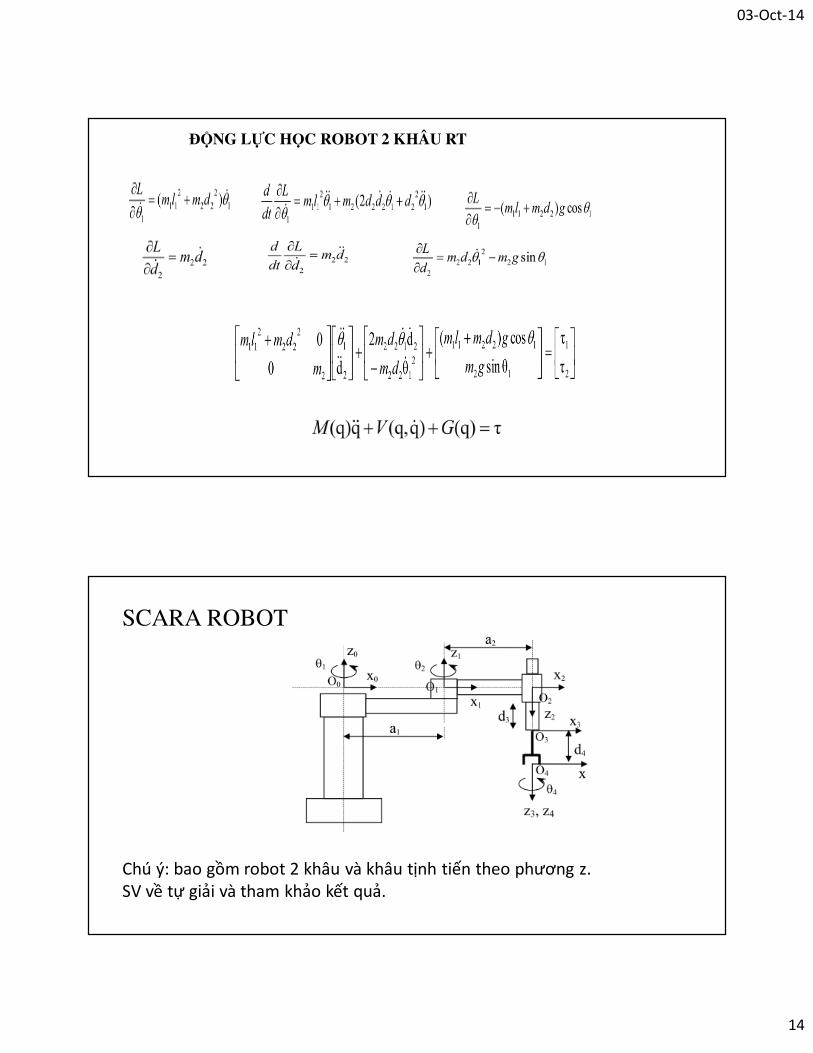
ðỘNG LỰC HỌC ROBOT 2 KHÂU RT
ðỘNG LỰC HỌC ROBOT 2 KHÂU RT
03-Oct-14
14
ðỘNG LỰC HỌC ROBOT 2 KHÂU RT
SCARA ROBOT
Chú ý: bao gồm robot 2 khâu và khâu tịnh tiến theo phương z.
SV về tự giải và tham khảo kết quả.

03-Oct-14
15
− Khâu 3:
Động năng :
Thế năng : P3= m3gz3.
. 2
3 3 3
1
2K m z=
..
3 3 3 3m z m g τ− =
Áp dụng lagrange
2 2 2 ..
1 2 1 2 2 1 2 2 2 2 2 1 2 2 1
2 2 ..
2 2 2 1 2 2 2 2 2
..
3 3
( ) 2 cos cos 0
cos 0 .
0 0
m m a ma mm ma maa
ma maa ma
m z
θ θ θ
θ θ
+ + + +
+
1 2 1 1 2 2 1 2
2 2 1 2
3
( ) cos cos( )
cos( )
m m ga m ga
m ga
m g
θ θ θ
θ θ
+ + +
+ +
− . . . 2
2 1 2 1 2 2 2
.2
2 1 2 1 2
(2 ) sin
sin
0
m a a
m a a
θ θ θ θ
θ θ
− +
+ =
1
2
3
τ
τ
τ

03-Oct-14
16
VIẾT PHƯƠNG TRÌNH ðỘNG LỰC HỌC CHO ROBOT RTT CÓ TỌA ðỘ HÌNH TRỤ NHƯ SAU- về nhà…
1θ
2d
3d
2a
01 zz ≡
2d
3d
2a
01 yy ≡
01 xx ≡
1θ
xx ′≡2
z′
y′
x′ 3x
3y
3z
2y
01 OO ≡
2O
3OOE ≡
2O′2z

03-Oct-14
17
2 2 2
1 2 3 2 3 3 3 3 3 3 2
2
3 2 3
1( 2 ) 0
2
( ) 0 0
10
2
J J m a m l m d m d l m a
M q m
m a m
+ + + + −
=
3 3 3 3
2
3 3 1
(2 )
( , ) 0
( )
d m d m l
V q q
d l m
θ
θ
−
= − −
& &
&
&
2 3
0
( ) ( )
0
G q m m g
= +

03-Oct-14
18
CHÚC CÁC BẠN MAY MẮN







