
© Crown copyright 2006 Page 1
The Analysis of Water Vapour in Met Office NWP Models
Bill Bell (SSMI, SSMIS in global NWP) Amy Doherty (AMSU-B, scattering RT at 183GHz) Tim Hewison (groundbased MWR for regional NWP)
Wettzell MWR meeting, October 9 -11th 2006
© Crown copyright 2006 Page 2
Outline
• Background
• NWP models & variational assimilation . Fast RT model – RTTOV.• Satellite radiance observations• The accuracy of forecast water vapour fields ?• Issues for MW observations of WV
• The Assimilation of SSMI / SSMIS Radiances
• Fundamental limitations of TCWV / 22GHz observations – no profile information• RT Model issues (22GHz line parameters)
• Assimilation of 183 GHz radiances (AMSU-B)
• Forward modelling in the presence of ice cloud
• Ground based MWR (nowcasting)
• 1DVar• Instrument• Retrieval performance ( accuracy and resolution )• Pros and Cons
• Summary and Conclusions

© Crown copyright 2006 Page 3
Met Office NWP models
Global 40 kmN320L50640x481x50 63 km top
North Atlantic & European 12 km720x432x38 38 km top
Old UK 12 kmRetired
New UK 4 km288x320x38 38 km top
The main applicationfor MW radiances is definingthe initial conditions from which the forecast model runs
© Crown copyright 2006 Page 4
Variational Assimilation
‘The Analysis Problem’:
Determine most probable state vector, xa, given Observation, y Background state xb (prior knowledge of atmospheric state) Error characteristics of each (assumed Gaussian)
Minimise cost function:
J(xa)= (y-H(xa))T R-1 (y-H(xa)) + (xa- xb)T B-1 (xa- xb)
Requires: Observations, y Background, xb
Background Error Covariance Matrix, B Observation Error Covariance Matrix, R Observation Operator, H(x) Jacobian of H(x), H(x)=xH(x)=y/x
If y is a radiance observationH is a RT model

© Crown copyright 2006 Page 5
Four-dimensional variational assimilation(4D-Var)
Observation
Time
Temperature
Background xb
Analysis
Slide Courtesy of Amos Lawless/Sue Ballard
OBSERVATIONS DISTRIBUTED IN TIME

© Crown copyright 2006 Page 6
Fast Radiative Transfer Model: RTTOV
Fast MW and IR RT model – primarily designed for TOA Tb
calculations
Predictor based scheme based on LbL calculations :
ODi=f(Ti,qi,{c1i, c2
i,c3i,…}) for each layer i
{c1i, c2
i,c3i,…} determined from diverse profile dataset
MW RT based on Liebe MPM 92 for O2 , MPM 89 for H2O and WV continuum
Each call ~1msec
http://www.metoffice.gov.uk/research/interproj/nwpsaf/rtm/index.html

© Crown copyright 2006 Page 7
N
N15
N16
N18
N
AQUA
F13
N
F16
ATOVS (T & q) AIRS (T & q) SSMI (WS)SSMIS (T, q, WS)
Satellite Radiances Assimilated06
12
18
00

© Crown copyright 2006 Page 8
Accuracy of temperature & humidity forecasts:T+24 hours Southern Hemisphere
T RH
BIAS
RMS
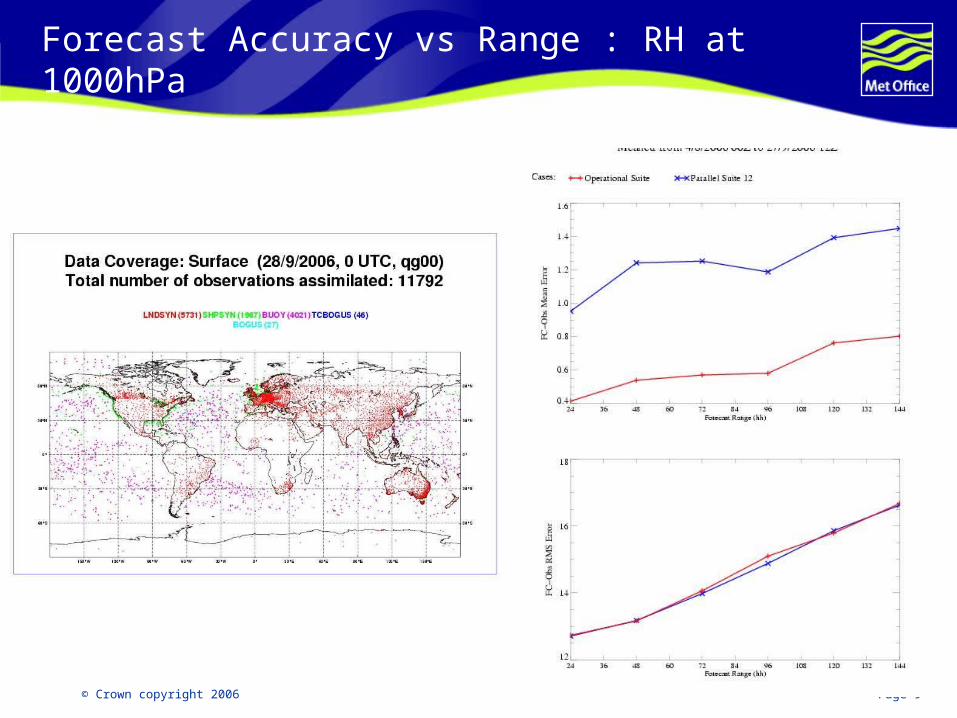
NWP models represent T fields better than RH fields
Pre
ssur
e /
hPa
© Crown copyright 2006 Page 9
Forecast Accuracy vs Range : RH at 1000hPa
© Crown copyright 2006 Page 10
Radiance Processing
1DVar ( QC & intelligent thinning of obs) : Analyse skin temperature Check convergence Detect cloud and select channels for 4D Var No of obs per 6 hour window :
ATOVS (AMSU) : 500,000 obs (3 satellites) SSMIS : 680,000 observations ( 1 satellite )
Preprocessing time : ~5 minutes on NEC SX-8
4DVar (analyse global atmospheric state): Uses QC’d observations (conventional and satellite data) 13,000 ATOVS obs, 4,000 SSMIS, 3,000 AIRS (+ other satellite and
conventional obs) Run time : < 10 minutes

© Crown copyright 2006 Page 11
Issues for MW radiance assimilation
Better treatment of surface/near surface channels
Better treatment of cloud and precipitation affected radiances, including scattering effects
Lack of information in the vertical (eg SSMI, AMSU-B)
Calibration & Biases (SSMIS/SSMIS)

SSMI & SSMIS

© Crown copyright 2006 Page 13
SSMIS: Instrument and scan geometrySSMIS: Instrument and scan geometry
MainReflector
ColdCalibrationReflectorWarm LoadFeedhorns
Special Sensor Microwave Imager/Sounder (SSMIS)

© Crown copyright 2006 Page 14
Background: SSMIS / SSMI Channels
SSMIS = SSMI channels + 13 T sounding (O2 line) chs + 3 q sounding (H2O line) chs + 150 GHz channel
εsurf = f (WS, pol) … so TB → WS (& TCWV & LWP)

© Crown copyright 2006 Page 15
SSMI
40N
20N
0N
20S
40S
AIRS
More vertical structure in AIRSincrements

© Crown copyright 2006 Page 16
e p vS c T L q gz Moist Static Energy
SSMI
AIRS
ATOVS
SSMI adds large ‘energy’ increments

© Crown copyright 2006 Page 17
RT Errors - 22GHz linewidth parameter
SSMI DATA
MPM 89
HITRAN 92

Cloud Affected RadiancesScattering at 183 GHz
© Crown copyright 2006 Page 19
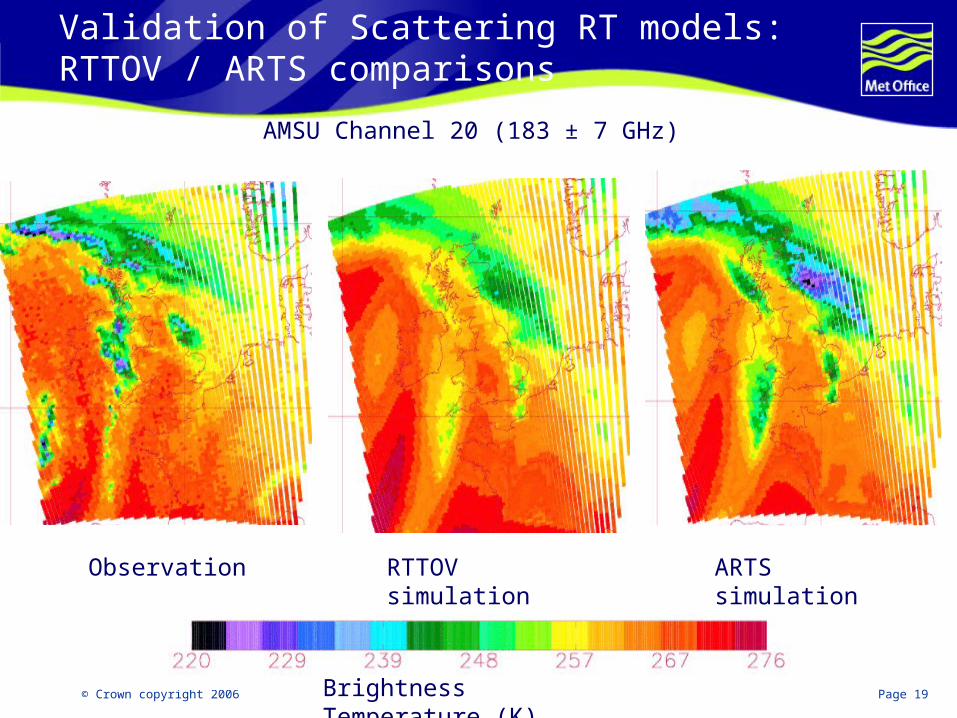
Validation of Scattering RT models:RTTOV / ARTS comparisons
AMSU Channel 20 (183 ± 7 GHz)
Observation ARTS simulationRTTOV simulation
Brightness Temperature (K)
© Crown copyright 2006 Page 20
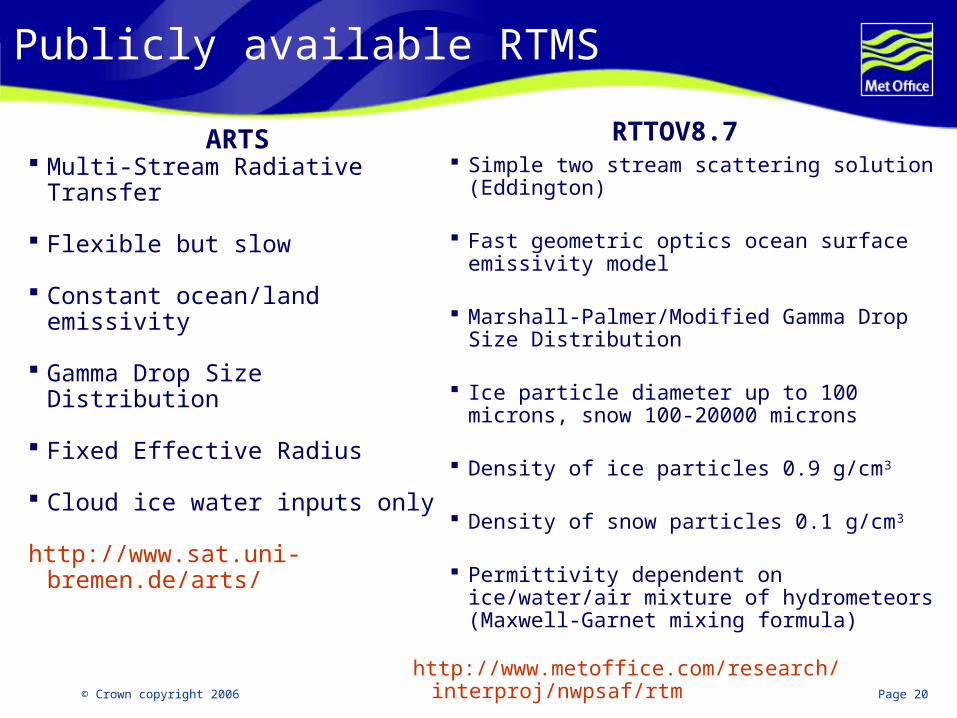
Publicly available RTMS
RTTOV8.7 Simple two stream scattering solution (Eddington)
Fast geometric optics ocean surface emissivity model
Marshall-Palmer/Modified Gamma Drop Size Distribution
Ice particle diameter up to 100 microns, snow 100-20000 microns
Density of ice particles 0.9 g/cm3
Density of snow particles 0.1 g/cm3
Permittivity dependent on ice/water/air mixture of hydrometeors (Maxwell-Garnet mixing formula)
http://www.metoffice.com/research/interproj/nwpsaf/rtm
ARTS Multi-Stream Radiative Transfer
Flexible but slow
Constant ocean/land emissivity
Gamma Drop Size Distribution
Fixed Effective Radius
Cloud ice water inputs only
http://www.sat.uni-bremen.de/arts/
© Crown copyright 2006 Page 21
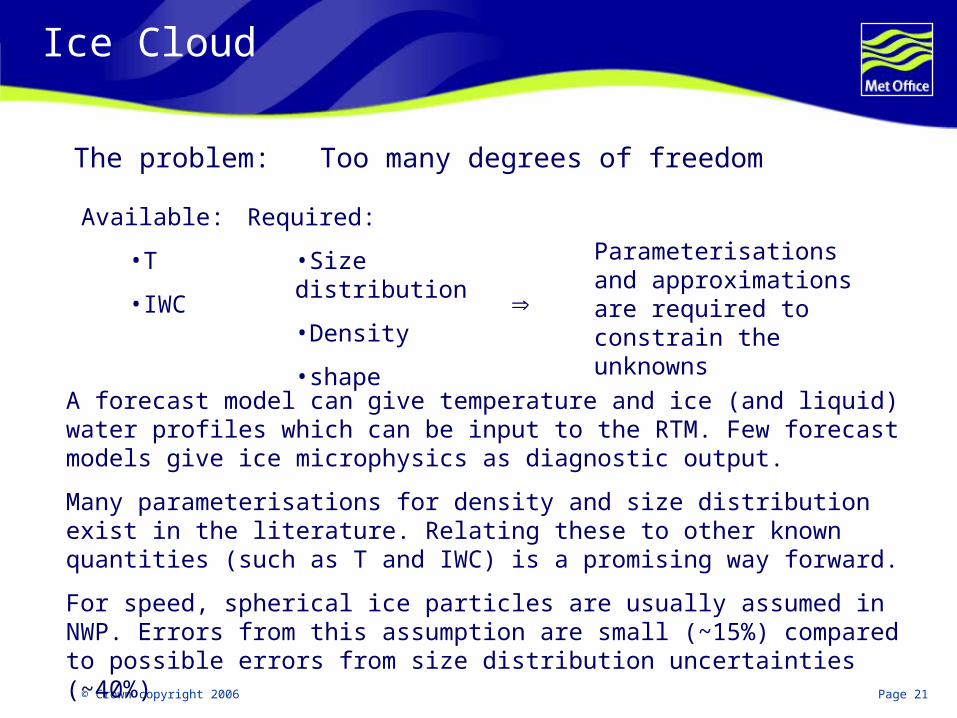
Ice Cloud
The problem: Too many degrees of freedom
Available:
•T
•IWC
Required:
•Size distribution
•Density
•shape
Parameterisations and approximations are required to constrain the unknowns
A forecast model can give temperature and ice (and liquid) water profiles which can be input to the RTM. Few forecast models give ice microphysics as diagnostic output.
Many parameterisations for density and size distribution exist in the literature. Relating these to other known quantities (such as T and IWC) is a promising way forward.
For speed, spherical ice particles are usually assumed in NWP. Errors from this assumption are small (~15%) compared to possible errors from size distribution uncertainties (~40%)

Ground Based MW radiometry
© Crown copyright 2006 Page 23
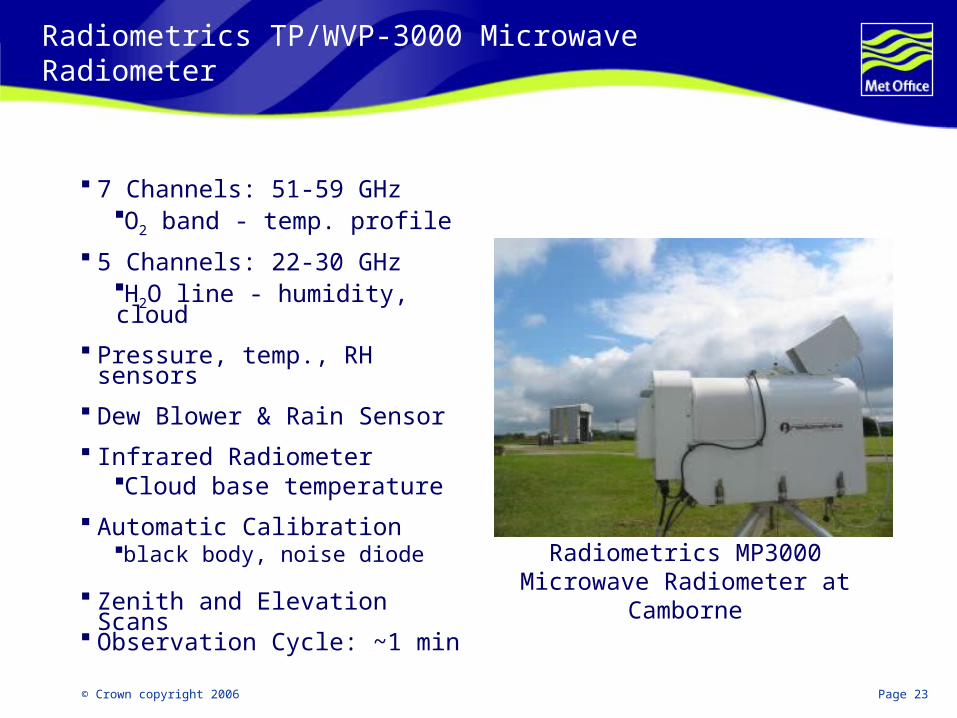
Radiometrics TP/WVP-3000 Microwave Radiometer
7 Channels: 51-59 GHzO2 band - temp. profile
5 Channels: 22-30 GHzH2O line - humidity, cloud
Pressure, temp., RH sensors
Dew Blower & Rain Sensor
Infrared RadiometerCloud base temperature
Automatic Calibrationblack body, noise diode
Zenith and Elevation Scans Observation Cycle: ~1 min
Radiometrics MP3000 Microwave Radiometer at Camborne
© Crown copyright 2006 Page 24
1D-Var
Determine most probable state vector, xa, given Observation, y Background state xb (prior knowledge of atmospheric state) Error characteristics of each (assumed Gaussian)
Minimise cost function:
J(xa)= (y-H(xa))T R-1 (y-H(xa)) + (xa- xb)T B-1 (xa- xb)
Requires: Observations, y (MW radiometer) Background, xb
Background Error Covariance Matrix, B Observation Error Covariance Matrix, R Observation Operator, H(x) Jacobian of H(x), H(x)=xH(x)=y/x

© Crown copyright 2006 Page 25
Background and State Vector, x
Need background, xb to resolve ill-posed problem
Use T+3 to T+9 ForecastIndependent of validation
28 lowest levelsConcentrated near surface
T(z), q(z), L(z)
Fix profile above 14km
Choice of State Vector: x=[T1, ..T28, lnqt1, .. lnqt28] 17 Sites of archived profiles
from UK Mesoscale modelUMG3 Models levels
Met Office UK Mesoscale Model

© Crown copyright 2006 Page 26
Error Analysis of Retrieved Profiles
Gaussian linear case:Analysis error of optimal estimation retrieval:
A = (HTR-1H + B-1)-1
Compare with B:
T: A < B for z<5km, T<1 Kq: A < B for z<3km, lnq<0.4
For q, A depends on state
Using surface sensors only – A < B for z<500m
A ~ sondes for z<1km
Background Error, B, (black) and Analysis Error, A, using Radiometer (red),Only surface sensors (green), Radiosonde (blue).

© Crown copyright 2006 Page 27
Vertical Resolution
Gain Matrix, K = BHT(HBHT+R)-1
Averaging Kernel Matrix = KH
Vertical Resolution of Analysis, z.diag((KH)-1)
~2x larger than other defns
T profile resolution increases with height ~2z
lnq profile resolution = (x)
Some q resolution for z<1km, but IWV above
Vertical resolution of analysis temperature and humidity (lnqt) profiles calculated as the inverse of the trace of the averaging kernel matrix [Purser and Huang, 1993] (US Std Atm)

© Crown copyright 2006 Page 28
Example retrievals
100 synthetic observations, yo
based on real sonde, xt and NWP background, xb
Forecast inversion too low Overestimated the humidity x2
83% converged in ~9 iterations on average
Retrievals closely clusteredRobust to observation noise
Retrievals closer to xt than xb
Thins the cloud
B makes it impossible for retrieval to move inversion
Retrievals (red), Background (black), Radiosonde (blue).
Left panel shows temperature profiles. Right panel shows profiles of humidity (lnq)
and liquid water (lnql) and specific humidity at saturation (dotted)

© Crown copyright 2006 Page 29
Ground based MW radiometry: Conclusions
Pros Optimal method to integrate observations with background Provides estimate of error in retrieval Shows impact from MWR below ~4km – most <1km
Cons Fundamentally poor vertical resolution of passive profilers Convergence problems for very non-linear problems Difficult when background is wrong (shifting patterns)
Future Work Add ceilometer cloud base/cloud radar tops/GPS IWV to y Integrate with Wind Profiler SNR – e.g. Boundary Layer top How to exploit high time resolution? 4D-VAR? Variability?
© Crown copyright 2006 Page 30
Summary & Conclusions
MW radiances are an important component of operational NWP systems, it is now normal to assimilate these directly as radiances, rather than using retrievals
Variational assimilation (1d, 3d or 4d) is an optimal way of combining background and observational information to define an atmospheric state
Fast RT models are important in achieving this
Challenges presented by MW radiance measurements include : dealing with cloud and precipitation, limited vertical resolution, biases (eg RT biases)
Ground based MWR is being assessed for nowcasting and assimilation applications. Column water estimates are accurate , but vertical resolution is poor (~1km for q)



![NWP-Chemie Protokoll - 6. Klasse - 3... · 2013. 11. 30. · NWP-Chemie Protokoll 3. Protokoll Max Heisinger Simone Atzwanger 6B Gruppe 1 28.10.2013 02.12.2013 ... [Wikipedia: Methanol]](https://cdn.vdocuments.pub/doc/165x107/612d32b41ecc515869420a26/nwp-chemie-protokoll-6-klasse-3-2013-11-30-nwp-chemie-protokoll-3.jpg)


![NWP-Chemie Protokollmaximaximal.com/texts/data/de//NWP - 6. Klasse - 3. Protokoll... · [Wikipedia: Methanol] Coffein Coffein ist ein Alkaloid aus der Stoffgruppe der Xanthine und](https://cdn.vdocuments.pub/doc/165x107/5b159d457f8b9a332f8d23a7/nwp-chemie-6-klasse-3-protokoll-wikipedia-methanol-coffein-coffein.jpg)
