
UNIVERSIDAD DON BOSCO
VICERRECTORÍA DE ESTUDIOS DE POSTGRADO
MAESTRÍA EN MANUFACTURA INTEGRADA POR COMPUTADORA
ROBÓTICA INTEGRADA A LA MANUFACTURA
Catedrático: MSc Manuel Napoleón Cardona Gutiérrez
GUÍA DE EJERCICIOS
“Herramientas Matemáticas”
Presenta
García Pérez, Sergio Miguel GP980067
Antiguo Cuscatlán, 16 de Octubre de 2014
El siguiente documento presenta la solución a los Ejercicios de la Guía: Herramientas
Matemáticas.
Ejercicio 1 (10%).
Encontrar el cuaternio y la matriz equivalente, a realizar los dos giros siguientes de
manera consecutiva:
a. Giro entorno a k1 = [1, 0, 1 ], un ángulo pi/4.
b. Giro entorno a k2 = [ 1, 1,0 ], un ángulo pi/6.
Ambos giros están definidos respecto del sistema fijo SOXYZ.
c. Cuál será el resultado de someter a los giros consecutivos del ejercicio 1 al punto,
p= [ 1, 1, 1]?.
SOLUCIÓN literales a. y b..
Para los literales a. y b., se calcula el cuaternio 1 (Q1) y cuaternio 2 (Q2),
respectivamente, luego se obtiene el cuaternio resultante de aplicar los dos giros,
considerando que es por medio de marcos fijos (SOXYX):
Q = Q2 * Q1
La aplicación de la rotación expresada por el cuaternio Q1 a un vector k1, vendrá dada
por:
k3 = Q1 ◦ (0,k1) ◦ Q1* donde Q1 = [ cos(θ1/2) , k1sen(θ1/2) ]
La aplicación de la rotación expresada por el cuaternio Q2 a un vector k2, vendrá dada
por:
k4 = Q2 ◦ (0,k2) ◦ Q2* donde Q2 = [ cos(θ2/2) , k2sen(θ2/2) ]
La solución en Matlab del cuaternio y la matriz equivalente es:
Q = [ 0.8429 0.4800 0.1196 0.2119 ]
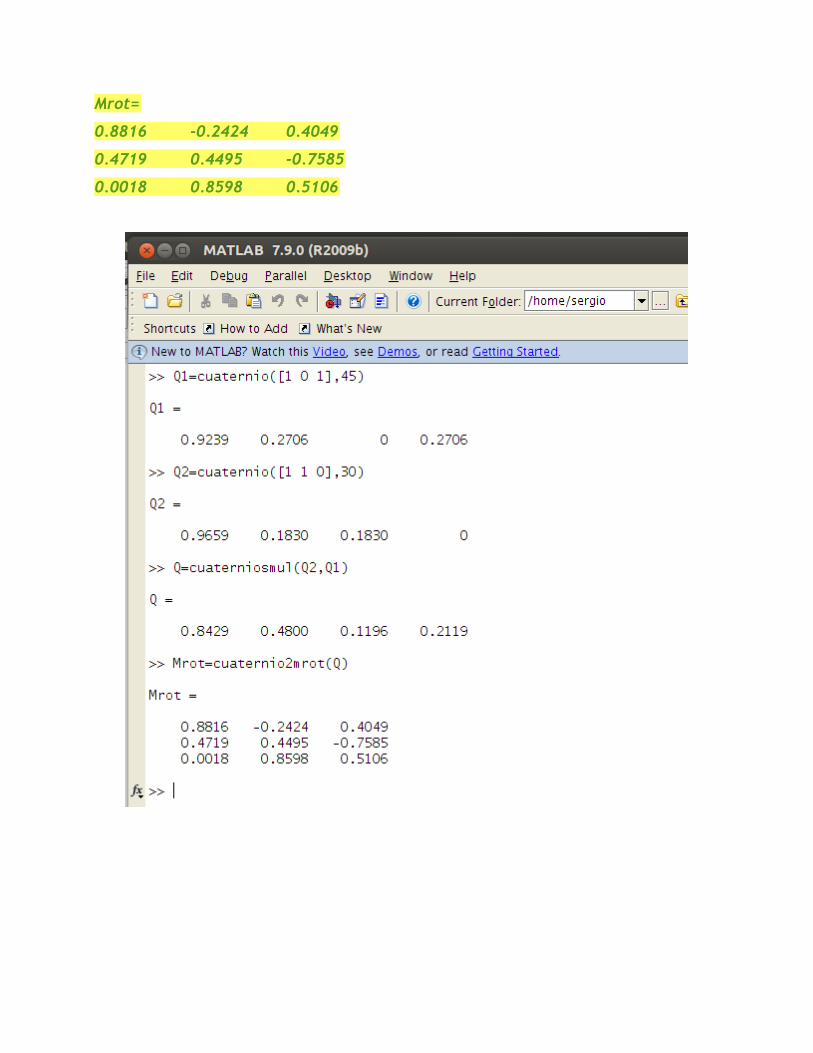
Mrot=
0.8816 -0.2424 0.4049
0.4719 0.4495 -0.7585
0.0018 0.8598 0.5106
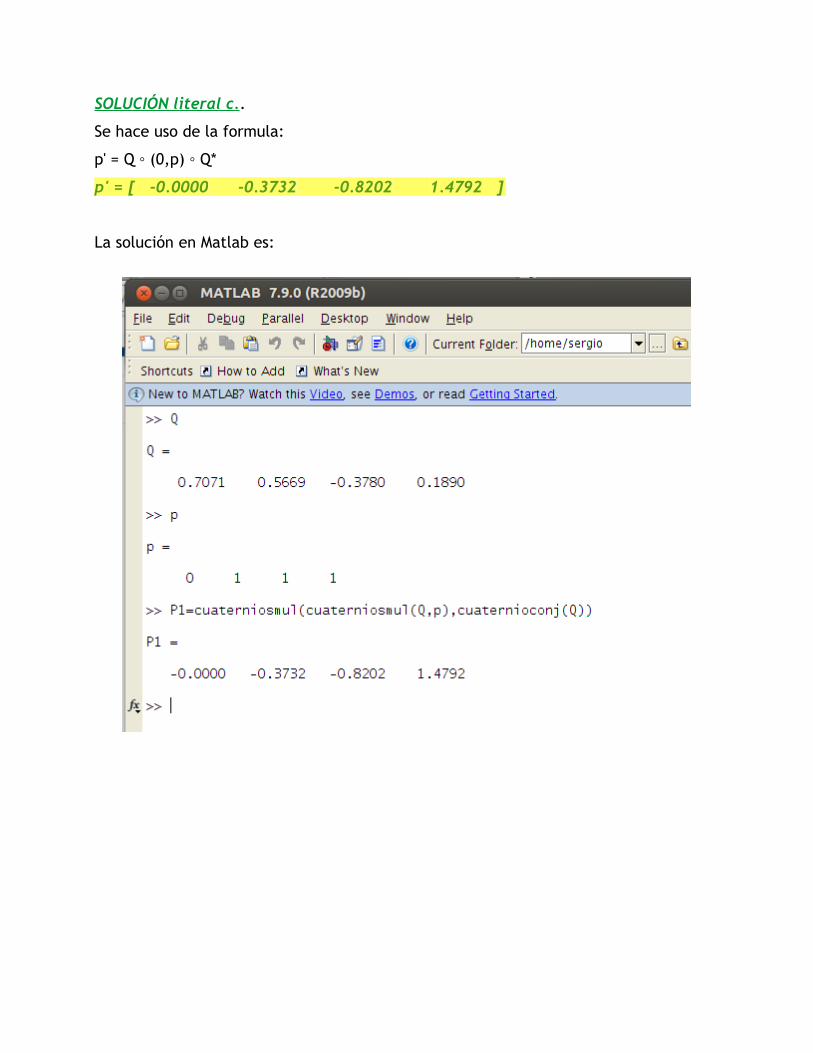
SOLUCIÓN literal c..
Se hace uso de la formula:
p' = Q ◦ (0,p) ◦ Q*
p' = [ -0.0000 -0.3732 -0.8202 1.4792 ]
La solución en Matlab es:

Ejercicio 2 (20%).
Al sistema de coordenadas SOXYZ, se le realizan las siguientes transformaciones:
a. Giro en torno al eje X un ángulo de pi/2.
b. Una traslación definida por el vector d2 = [2, 1, 1].
c. Giro entorno al vector k3 = [1, 1, 0] un ángulo pi/3.
d. Giro definido por el cuaternio q4 = [0.9659, 0, 0.2588, 0.2588].
e. Traslación definida por el vector d5 = [2, 1, 2].
Encontrar las coordenadas en el sistema SOUVW del punto p que en el sistema SOXYZ
tiene por coordenadas [1, 1, 1].
Todos los movimientos están definidos en el sistema SOUVW.
SOLUCIÓN.
Como se hará la manipulación simultánea de rotaciones y traslaciones, se utilizarán
MTH para la solución de este ejercicio.
Se realizan las siguientes transformaciones parciales:
T1 = R(x,90º)
T2 = T(d2)
T3 = R(k3,60º) Observación, se utilizarán los cuaternios y su MTH
T4 = R(q4) Observación, se obtendrá la MTH de este cuaternio
T5 = T(d5)
Al ser las transformaciones definidas en un sistema móvil (SOUVW), la transformación
total, se calcula así:
T = T1 * T2 * T3 * T4 * T5
De lo descrito anteriormente, se generan los siguientes cálculos en Matlab:


Ahora, para encontrar las coordenadas de Puvw, conociendo el punto Pxyz = [1,1,1],
se utilizará la matriz T encontrada y se calcula:AP = T * BP
BP = T-1 * AP
Siendo A, el sistema SOXYZ y B el sistema SOUVW
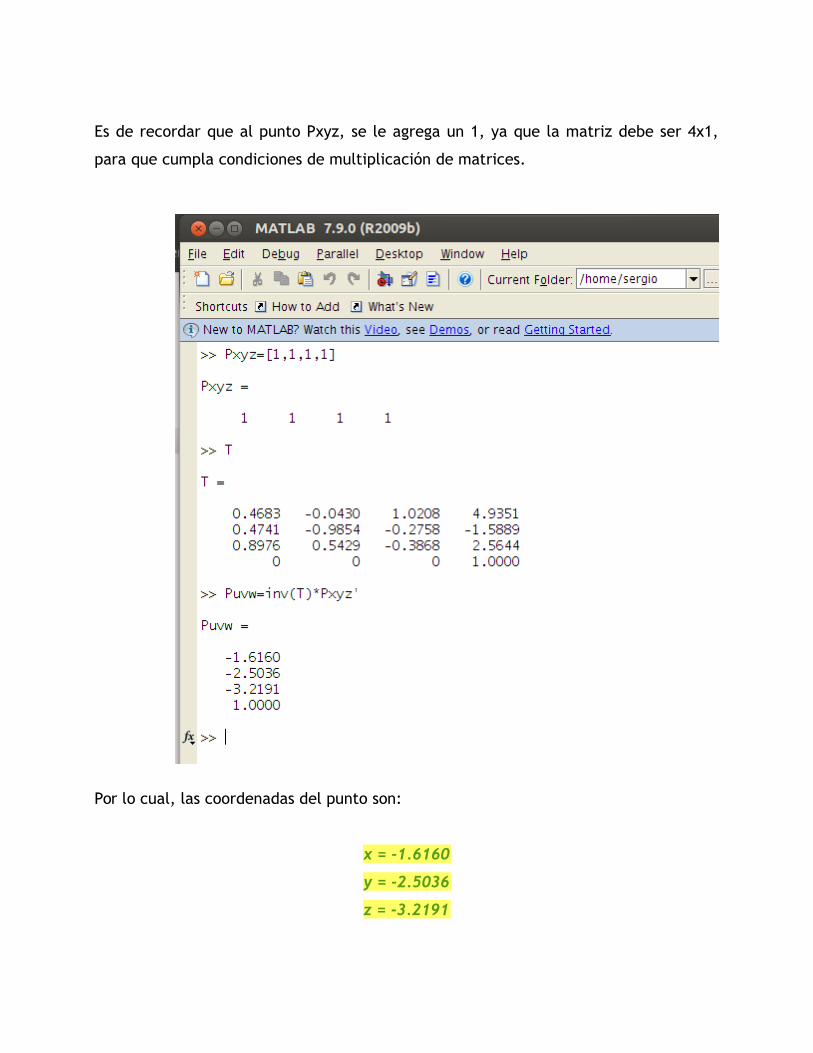
Es de recordar que al punto Pxyz, se le agrega un 1, ya que la matriz debe ser 4x1,
para que cumpla condiciones de multiplicación de matrices.
Por lo cual, las coordenadas del punto son:
x = -1.6160
y = -2.5036
z = -3.2191

Ejercicio 3 (20%).
Dibujar las diferentes localizaciones de un sistema de coordenadas SOXYZ al que se le
somete a los siguientes desplazamientos:
a. Giro en Y de pi/3.
b. Translación en Y de 1 una unidad.
c. Giro Z de pi.
d. Giro en X de pi/4.
e. Traslación en Z de 1 unidad.
Escribir directamente (basándose en el dibujo), la expresión de matriz de
transformación homogénea que expresa al sistema de coordenadas SOUVW, en la base
original SOXYZ.
Hacer para:
1. Todas las transformaciones referidas al sistema móvil SOUVW.
2. Todas las transformaciones referidas al sistema fijo SOXYZ
SOLUCIÓN.
A los desplazamientos planteados (literales desde a. hasta e.), se les calculará su
respectiva MTH y, su MTH global, para que, por medio del comando “marcosmoviles”,
se puedan observar en Matlab la posición del sistema del sistema, luego de los
desplazamientos.
T1 = R(y,60º)
T2 = T(0,1,0)
T3 = R(z,180º)
T4 = R(x,45º)
T5 = T(0,0,1)

REFERENCIA SISTEMA MÓVIL
Si la referencia es el sistema móvil, SOUVW, la secuencia para realizar la figura será:
T1, T1*T2, T1*T2*T3, T1*T2*T3*T4, T1*T2*T3*T4*T5, siendo esta última la MTH global
del sistema.
Por medio de Matlab, se obtienen las MTH correspondientes a cada transformación:


Ahora, por medio del comando marcosmoviles en Matlab, se grafica una a una las
transformaciones hasta graficar la MTH global T
Figura a. Gráfica al realizar transformación 1 (T1)
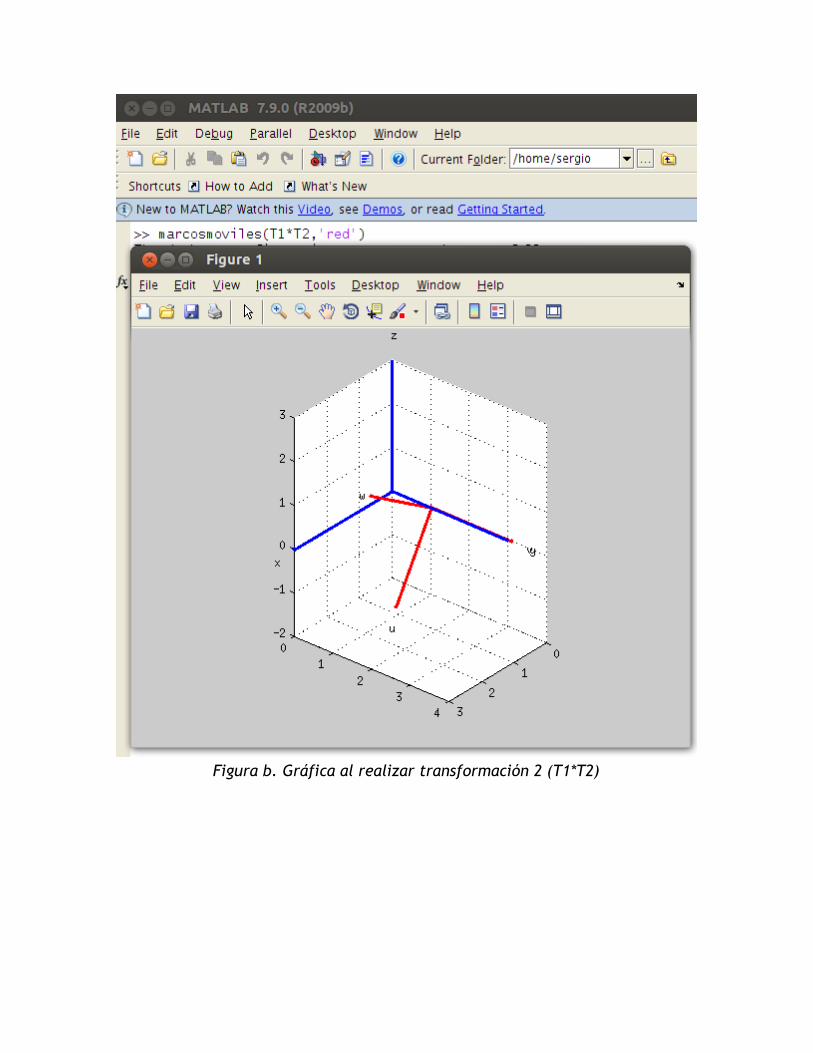
Figura b. Gráfica al realizar transformación 2 (T1*T2)
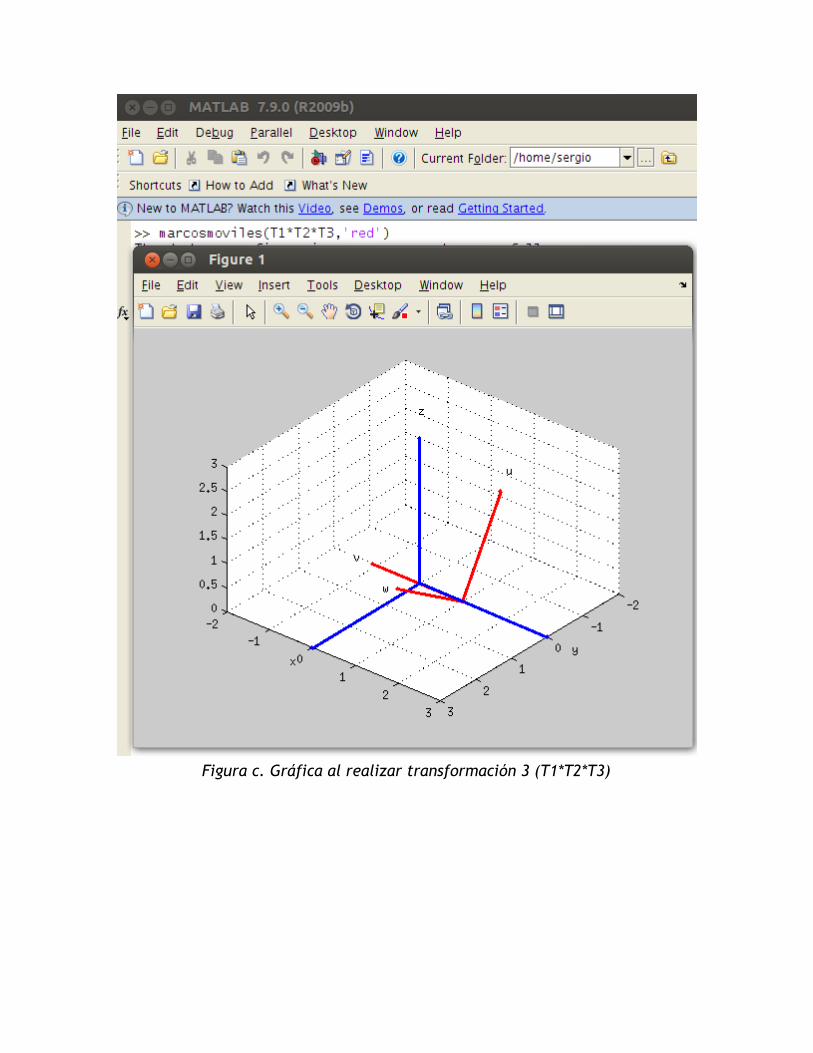
Figura c. Gráfica al realizar transformación 3 (T1*T2*T3)
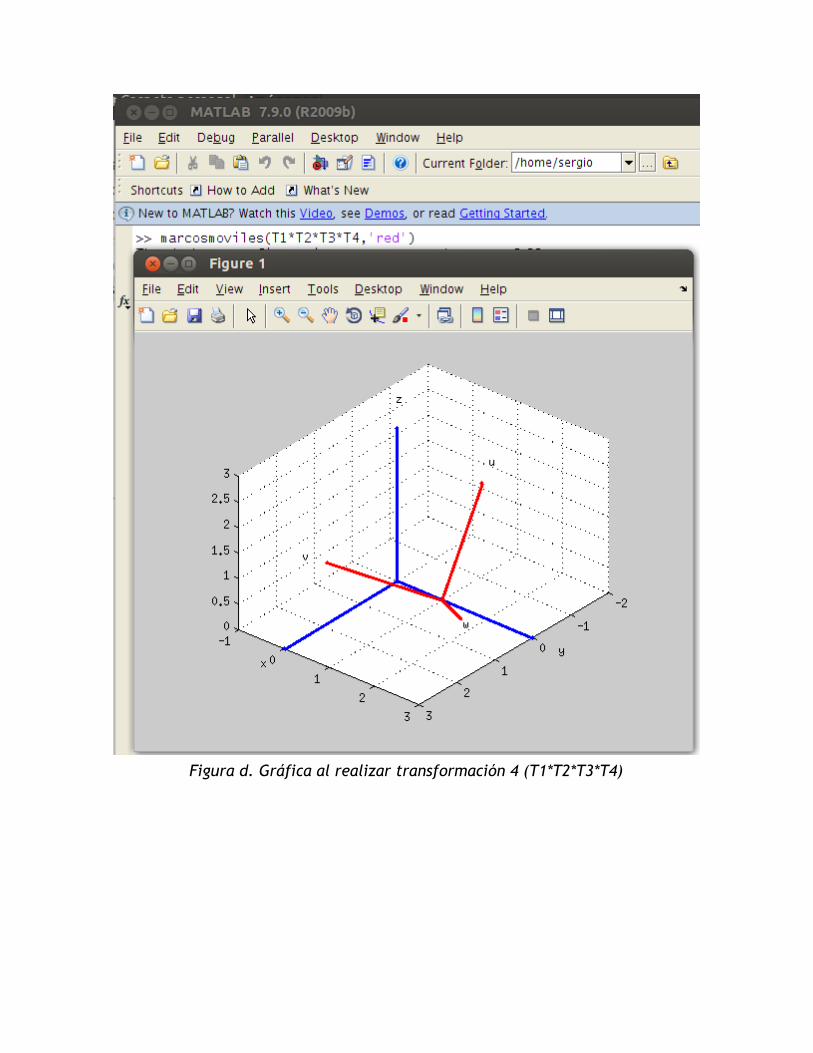
Figura d. Gráfica al realizar transformación 4 (T1*T2*T3*T4)

Figura e. Gráfica al realizar transformación final (T1*T2*T3*T4*T5)

REFERENCIA SISTEMA FIJO
Si la referencia es el sistema fijo, SOXYZ, la secuencia para realizar la figura será:
T5, T5*T4, T5*T4*T3, T5*T4*T3*T2, T5*T4*T3*T2*T1
Figura f. Gráfica al realizar transformación 1 (T5)

Figura g. Gráfica al realizar transformación 2 (T5*T4)
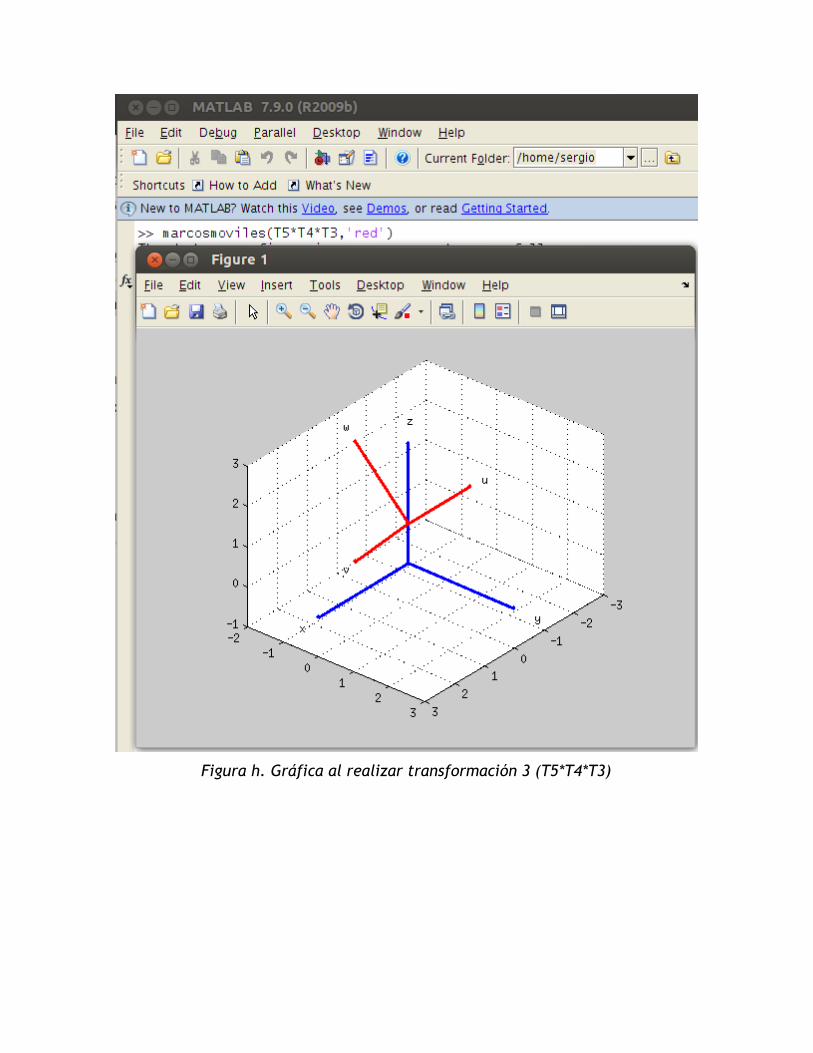
Figura h. Gráfica al realizar transformación 3 (T5*T4*T3)

Figura i. Gráfica al realizar transformación 4 (T5*T4*T3*T2)

Figura j. Gráfica al realizar transformación final (T5*T4*T3*T2*T1)

Ejercicio 4 (20%).
La figura 1, muestra un robot paralelo planar 3RRR, si se sabe que el centro de la
plataforma móvil (G) se traslada según el vector [-10, 20, 0] cm y rota 15º respecto a
la posición mostrada, encuentre las nuevas coordenadas del centro de la plataforma
móvil y del punto B.
Dimensiones:
Eslabones ai = bi = 40 cm.
Plataforma móvil (h) = 10 cm.
Plataforma base (H) = 100 cm.
SOLUCIÓN UBICACIONES INICIALES, PUNTO G Y PUNTO B.
Ubicación inicial del punto G.
Como referencia en la Figura 1., se observa que el punto G, se encuentra en el centro
de la plataforma base. Conociendo que la distancia entre P y Q es H, se supondrá lo
siguiente:
(1) La distancia entre Q y R, es H.
(2) La distancia entre R y P, es H.
(3) P, Q y R, forman un triángulo equilátero.
Con las anteriores suposiciones, el punto G, representa el centro de triángulo PQR y
por geometría (y trigonometría) se obtienen sus respectivas coordenadas, vistas desde
el origen, que para el caso es el punto P. Se tendrá como referencia un triángulo
rectángulo con vértices PG(H/2).
Por lo tanto, la coordenada en “x”, viene dada por:
xG = H/2 = 100/2 = 50 cm
La coordenada en “y”, viene dada por:
Tan 30º = yG/xG
yG = xG * Tan 30º = 50 * Tan 30º = 28.87 cm
Entonces, la coordenada inicial del punto G es ( 50 , 28.87 , 0 ).
Ubicación inicial del punto B.
Se tendrá como referencia un triángulo rectángulo con vértices, BG(h/2) y el punto G,
representa el centro de triángulo BG(h/2). Por geometría (y trigonometría) se
obtendrán las coordenadas iniciales del punto B, vistas desde el origen, que para el
caso es el punto P.
Por lo tanto, la coordenada en “x”, viene dada por:
xB = xG + h/2 = 50 + (10/2) = 55 cm

La coordenada en “y”, viene dada por:
yB = yG – [ ( h/2 ) * Tan 30º ] = 28.87 - [ ( 10/2 ) * Tan 30º ] = 25.98 cm
Entonces, la coordenada inicial del punto G es ( 55 , 25.98 , 0 ).
SOLUCIÓN UBICACIONES FINALES, PUNTO G Y PUNTO B.
El robot se traslada según el vector [-10, 20, 0] cm y rota 15º respecto a la posición
mostrada (eje z, saliendo del plano de la base).
Ubicación final del punto G.
Bajo la suposición de que, los puntos que se encuentran sobre el eje de rotación de la
plataforma móvil (punto G), no sufren cambio de posición debido a las rotaciones, ya
que son parte del eje de rotación, la posición final del punto G, solo se verá afectada
por la traslación descrita anteriormente.
Por lo tanto, la coordenada en “x”, viene dada por:
xG final = xG + traslación en x de la transformación = 50 + ( -10 ) = 40 cm
La coordenada en “y”, viene dada por:
yG final = yG + traslación en y de la transformación = 28.87 + 20 = 48.87 cm
Entonces, la coordenada final del punto G es ( 40 , 48.87 , 0 ).
Ubicación final del punto B.
El punto B, se somete a la transformación global, es decir, traslación y rotación. Se
toma como referencia la Figura k, para la relación geométrica de los puntos.

Figura k. Geometría de referencia para calculo de punto G final y punto B final

En primer lugar al trasladarse según el vector [-10, 20, 0] cm, la posición intermedia
del punto B, es:
La coordenada en “x”, viene dada por:
xB intermedia = xB + traslación en x de la transformación = 55 + ( -10 ) = 45 cm
La coordenada en “y”, viene dada por:
yB intermedia = yB + traslación en y de la transformación = 25.98 + 20 = 45.98 cm
Entonces, la coordenada intermedia del punto B es ( 45 , 45.98 , 0 ).
En segundo lugar, el punto B, rota 15º con respecto al eje z, por lo que su posición
final, se calcula así:
La coordenada en “x”, viene dada por:
xB final = x1 + x2 + xG final
donde
x1 = ( h/2 ) * Tan 30º * Cos 75º
x2 = ( h/2 ) * Cos 15º
xB final = ( h/2 ) * Tan 30º * Cos 75º + ( h/2 ) * Cos 15º + 40
xB final = 0.7471 + 4.8296 + 40
xB final = 45.58 cm
La coordenada en “y”, viene dada por:
yB final = [ ( x1 + x2 ) * Tan 15º ] + yB intermedia
yB final = [ ( 0.7471 + 4.8296 ) * Tan 15º ] + 45.98
yB final = ( 5.5768 * Tan 15º ) + 45.98
yB final = 47.48 cm
Entonces, la coordenada final del punto B es ( 45.58 , 47.48 , 0 ).
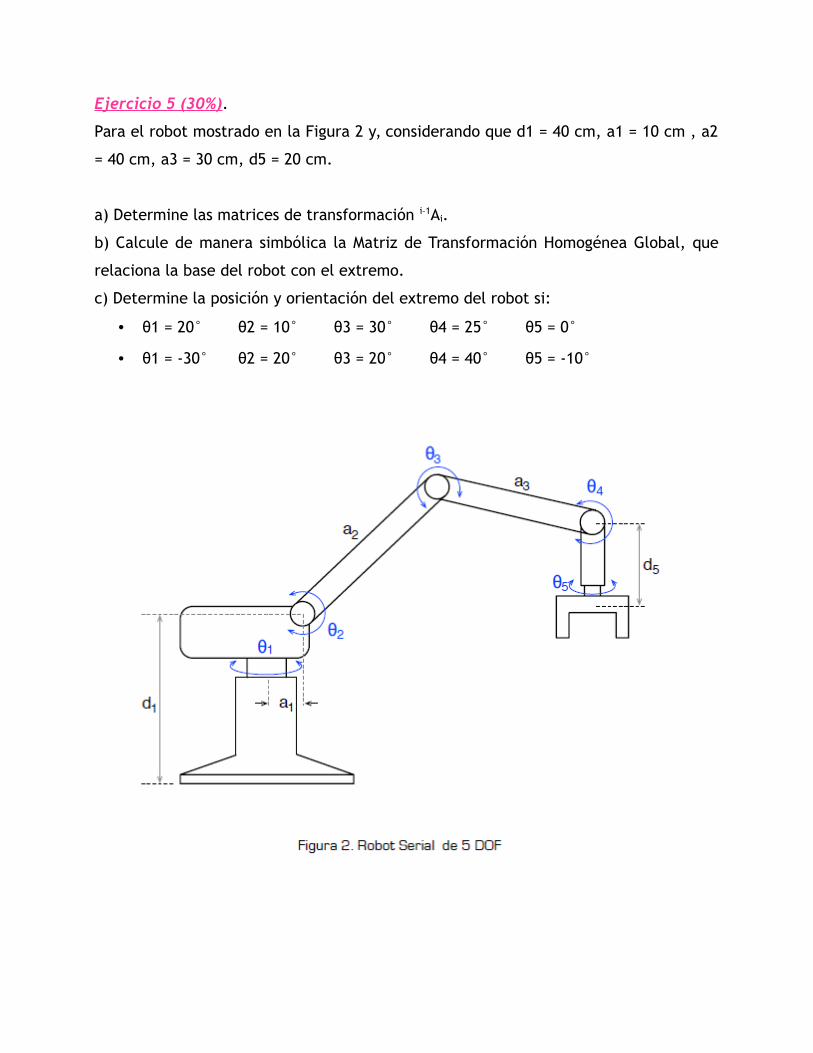
Ejercicio 5 (30%).
Para el robot mostrado en la Figura 2 y, considerando que d1 = 40 cm, a1 = 10 cm , a2
= 40 cm, a3 = 30 cm, d5 = 20 cm.
a) Determine las matrices de transformación i–1Ai.
b) Calcule de manera simbólica la Matriz de Transformación Homogénea Global, que
relaciona la base del robot con el extremo.
c) Determine la posición y orientación del extremo del robot si:
• θ1 = 20° θ2 = 10° θ3 = 30° θ4 = 25° θ5 = 0°
• θ1 = -30° θ2 = 20° θ3 = 20° θ4 = 40° θ5 = -10°

SOLUCIÓN.
Paso 1. 5 eslabones (n).
Paso 2. 5 articulaciones.
Paso 3. Se localizan 5 ejes, todos de tipo rotativo.
Paso 4. Desde i=0 hasta i=4, se sitúa:
El eje z0 sobre el eje de la articulación 1.
El eje z1 sobre el eje de la articulación 2.
El eje z2 sobre el eje de la articulación 3.
El eje z3 sobre el eje de la articulación 4.
El eje z4 sobre el eje de la articulación 5.
Paso 5. Se sitúa el origen del sistema S0 en cualquier punto del eje z0. Los ejes x0 e
y0, se sitúan formando un sistema dextrógiro.
Paso 6. Desde i=1 hasta i=4, se sitúan los orígenes de los sistemas S1, S2, S3, S4.
S1 en la intersección de z1 con la normal común a z0 y z1.
Si ambos ejes se cortan, se colocará S1 en el punto de corte.
Si son paralelos, S1 se coloca en articulación 2.
S2 en la intersección de z2 con la normal común a z1 y z2.
Si ambos ejes se cortan, se colocará S2 en el punto de corte.
Si son paralelos, S2 se coloca en articulación 3.
S3 en la intersección de z3 con la normal común a z2 y z3.
Si ambos ejes se cortan, se colocará S3 en el punto de corte.
Si son paralelos, S3 se coloca en articulación 4.

S4 en la intersección de z3 con la normal común a z3 y z4.
Si ambos ejes se cortan, se colocará S4 en el punto de corte.
Si son paralelos, S41 se coloca en articulación 5.
Paso 7. Se sitúan los ejes x1, x2, x3, x4.
Paso 8. Se sitúan los ejes y1, y2, y3, y4.
Paso 9. Situar el sistema S5 en el extremo del robot, z5 coincida con la dirección de
z4 y x5 sea normal a z4 y z5.
Paso 10, 11, 12 y 13. Desde i=1 hasta i=5, obtener θi, di, ai, αi.
Joint θi di ai αi
1 θ1 d1 a1 90º
2 θ2 0 a2 0
3 θ3 0 a3 0
4 θ4 0 0 -90º
5 θ5 d5 0 0

Figura l. Pasos 3 al 9, del Algoritmo de DH

Paso 14. Obtener las matrices de transformación:0A1, 1A2, 2A3, 3A4, 4A5.
Con la tabla elaborada en el paso anterior (Paso 10, 11, 12 y 13) y con la ayuda de
Matlab por medio de un archivo .m llamado eje5, se obtendrán las diferentes matrices
de transformación.
En Matlab, serán llamadas: A01, A12, A23, A34, A45.
Figura m. Archivo .m para la obtención de las matrices de transformación
Se ejecuta el programa y se obtienen las diferentes matrices:
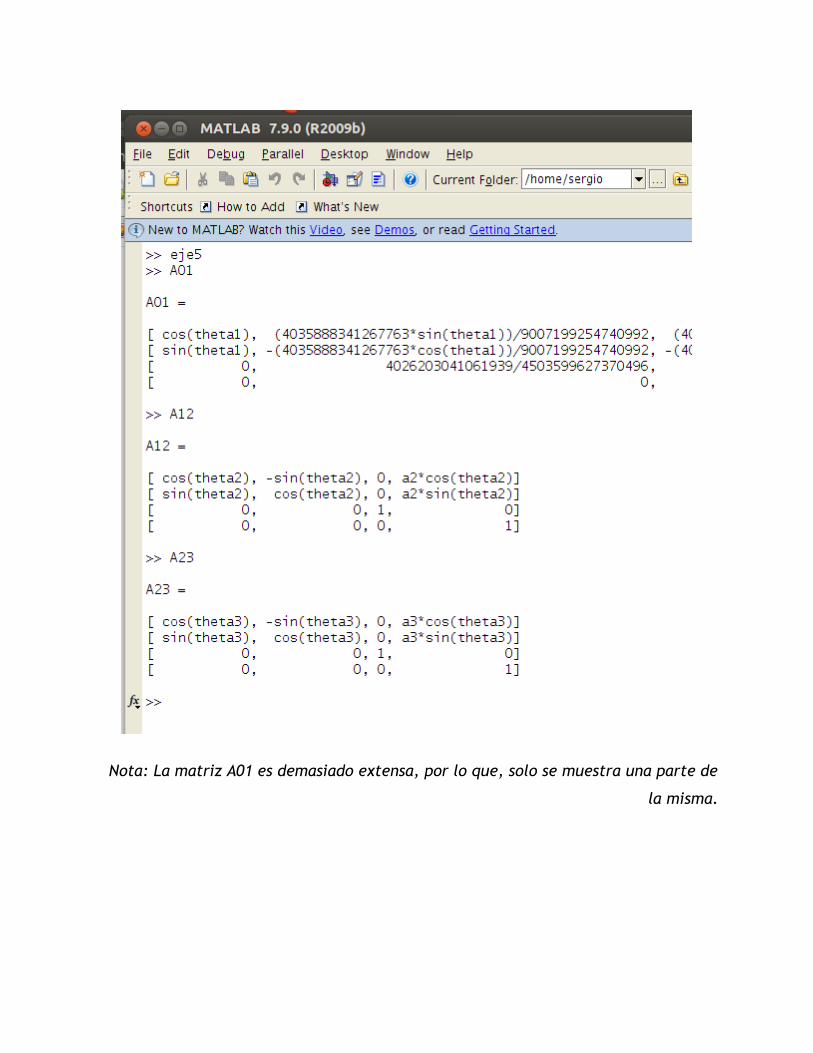
Nota: La matriz A01 es demasiado extensa, por lo que, solo se muestra una parte de
la misma.

Paso 15. Obtener la matriz de transformación que relaciona el sistema de la base con
el del extremo del robot.
Nota: La matriz T es demasiado extensa, por lo que, solo se muestra una parte de la
misma.

De la Matriz de Transformación Homogénea Global, se pueden obtener los datos de la
posición, xyz del extremo del robot, así:
x = T(1,4)
y = T(2,4)
z = T(3,4)
Por la configuración del robot (Figura 2), si todos los ángulos de giro son 0º, la posición
en x, viene dada por:
x = a1 + a2 + a3 = 10 + 40 + 30 = 80
Evaluaremos la MTH obtenida y comprobaremos dicha posición:
La posición en y, viene dada por:
y = 0 El robot se mueve solamente en el plano para estos valores de ángulos
Evaluaremos la MTH obtenida y comprobaremos dicha posición:

La posición en z, viene dada por:
z = d1 + d5 = 40 + 20 = 60
Evaluaremos la MTH obtenida y comprobaremos dicha posición:

Ahora, evaluando las configuraciones que nos da el problema, se obtienen las
siguientes posiciones y orientaciones.
• θ1 = 20° θ2 = 10° θ3 = 30° θ4 = 25° θ5 = 0°
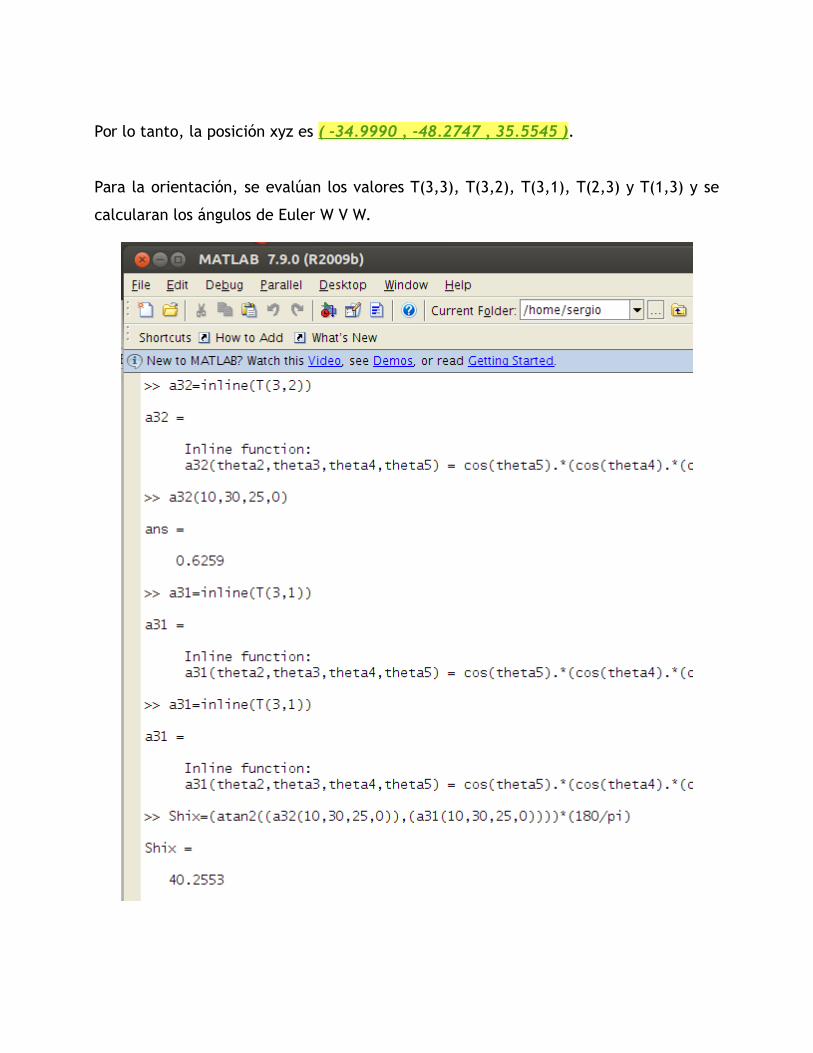
Por lo tanto, la posición xyz es ( -34.9990 , -48.2747 , 35.5545 ).
Para la orientación, se evalúan los valores T(3,3), T(3,2), T(3,1), T(2,3) y T(1,3) y se
calcularan los ángulos de Euler W V W.

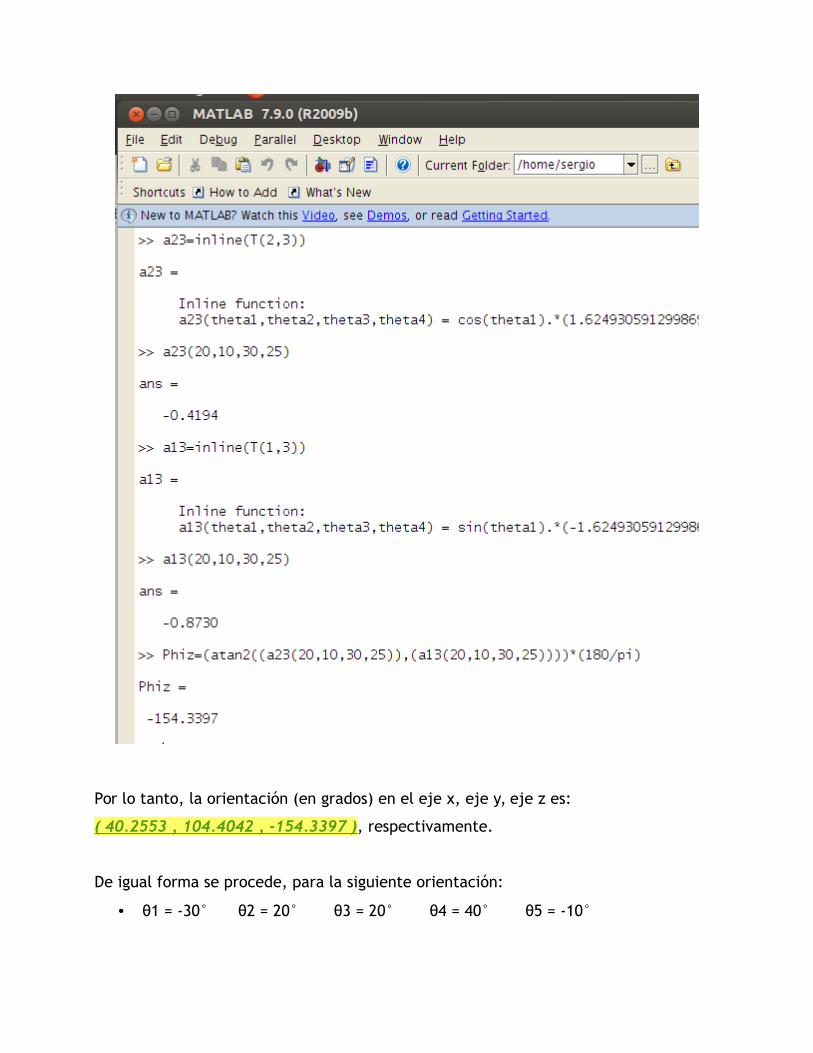
Por lo tanto, la orientación (en grados) en el eje x, eje y, eje z es:
( 40.2553 , 104.4042 , -154.3397 ), respectivamente.
De igual forma se procede, para la siguiente orientación:
• θ1 = -30° θ2 = 20° θ3 = 20° θ4 = 40° θ5 = -10°

La posición xyz es
( -20.9888 , 21.1008 , 94.8816 ).
La orientación (en grados) en el eje x, eje y, eje z es:
( 6.3655 , 83.5379 , 107.7189 ), respectivamente.
Resumiendo, para los valores solicitados en el literal c.
Posición
x
y
z
Orientación
Eje x (shi)
Eje y (teta)
Eje z (Phi)
d1 = 40 cm a1 = 10 cm
a2 = 40 cm a3 = 30 cm
d5 = 20 cm θ1 = 20°
θ2 = 10° θ3 = 30°
θ4 = 25° θ5 = 0°
-34.9990 cm
-48.2747 cm
35.5545 cm
40.2553º
104.4042º
-154.3397º
d1 = 40 cm a1 = 10 cm
a2 = 40 cm a3 = 30 cm
d5 = 20 cm θ1 = -30°
θ2 = 20° θ3 = 20°
θ4 = 40° θ5 = -10º
-20.9888 cm
21.1008 cm
94.8816 cm
6.3655º
83.5379º
107.7189º







