ecuacionesdiferencialesordinarias - … edos 2… · en términos sencillos, una ecuación...
TRANSCRIPT

ECUACIONES DIFERENCIALES ORDINARIASIngeniería de Caminos, CURSO 2005-2006
Ángeles Carmona y Andrés M. Encinas
Departamento de Matemática Aplicada III
E.T.S.E.C.C.P.B. Febrero de 2009


Índice general
1. Conceptos Básicos 7
1.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2. Un ejemplo de modelización: Sistemas de calor/frío . . . . . . . . . . . . . . 10
1.3. Ecuaciones lineales de primer orden . . . . . . . . . . . . . . . . . . . . . . . 12
1.4. Ecuaciones de variables separables . . . . . . . . . . . . . . . . . . . . . . . 18
1.4.1. El caso en el que no existen soluciones de equilibrio . . . . . . . . . . 23
1.4.2. El caso en el que existe una única solución de equilibrio . . . . . . . . 26
1.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2. Modelización con EDO de Primer Orden 35
2.1. Problemas geométricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.1.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.2. Problemas de Mezclas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3. Desintegración radiactiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.3.1. Datación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.2. Desintegración en cadena . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.3.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.4. Reacciones Químicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.4.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3

4 ÍNDICE GENERAL
2.5. Caída de Cuerpos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.5.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.6. Propagación de rumores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.6.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.7. Modelos de Poblaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.7.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3. Sistemas Lineales 55
3.1. Sistemas de calor/frío con varios compartimentos . . . . . . . . . . . . . . . 55
3.2. Derivación e integración de funciones matriciales . . . . . . . . . . . . . . . . 58
3.3. Teoría general de sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . 61
3.4. La función de Green de un sistema lineal . . . . . . . . . . . . . . . . . . . . 69
3.5. Dependencia de los datos y Estabilidad . . . . . . . . . . . . . . . . . . . . 72
3.6. El Sistema Adjunto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.6.1. El Teorema Fundamental de Curvas Planas . . . . . . . . . . . . . . 78
3.6.2. El Teorema Fundamental de Curvas Espaciales . . . . . . . . . . . . . 80
3.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4. Métodos de Solución de Sistemas Lineales 85
4.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.2. La exponencial de una matriz . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.2.1. Las Fórmulas de Rodrigues . . . . . . . . . . . . . . . . . . . . . . . 99
4.3. Cálculo de la exponencial de una matriz . . . . . . . . . . . . . . . . . . . . 101
4.4. Estabilidad de los sistemas de coeficientes constantes . . . . . . . . . . . . . 111
4.5. Sistemas de coeficientes variables . . . . . . . . . . . . . . . . . . . . . . . . 114
4.5.1. Aplicación al Teorema Fundamental de Curvas Planas . . . . . . . . 117
4.5.2. Aplicación al Teorema Fundamental de Curvas Espaciales . . . . . . . 119
4.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121

Índice general 5
5. Ecuaciones Lineales de Orden superior 133
5.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.2. Teoría general para ecuaciones de orden superior . . . . . . . . . . . . . . . . 134
5.3. La función de Green de una ecuación lineal . . . . . . . . . . . . . . . . . . . 143
5.4. Ecuaciones lineales con coeficientes constantes . . . . . . . . . . . . . . . . . 145
5.5. Estabilidad de las ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . 153
5.5.1. Estabilidad de las ecuaciones con coeficientes constantes . . . . . . . 154
5.6. Ecuaciones lineales no explícitas . . . . . . . . . . . . . . . . . . . . . . . . . 156
5.6.1. Ecuaciones lineales no explícitas con coeficientes constantes . . . . . . 160
5.7. Ecuaciones de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
5.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164

TEM
A1 CONCEPTOSBÁSICOS
1.1. Introducción
En esta sección desarrollaremos una aproximación a la teoría de ecuaciones diferencialesordinarias, partiendo de ejemplos simples que están encuadrados en el contexto del CálculoInfinitesimal o si se prefiere del Análisis Matemático de funciones de una variable.
En términos sencillos, una ecuación diferencial ordinaria, EDO en lo sucesivo, es unaidentidad en la que aparecen involucradas una función de una sola variable, que es la incógnitaa determinar, y sus derivadas sucesivas. Por tanto, la carta de naturaleza de una ecuacióndiferencial ordinaria está determinada por la presencia de la derivada o las derivadas deuna función de una variable. Así pues, la situación más sencilla será aquella en la que en laecuación sólo aparezca la derivada de la función incógnita, es decir una expresión del tipo
F(t, x(t), x′(t)
)= 0. (1.1)
Como en esta expresión sólo aparece involucrada una derivada de la función incógnitaconvendremos en denominar a (1.1) Ecuación Diferencial Ordinaria de Primer Orden. El que xsea la incógnita de la ecuación anterior significa que el problema que planteamos consiste enencontrar las funciones derivables que en su intervalo de definición satisfacen la identidad (1.1).La cuestión fundamental que se plantea al estudiar la ecuación (1.1) no es otra que la deestablecer la existencia de soluciones así como discutir su posible unicidad.
A pesar de lo afirmado, la expresión anterior aún no es la más simple posible puesto quesi bien una ecuación diferencial requiere la presencia de la o las derivadas de la incógnita, noprecisa que también aparezca dicha función. Por tanto, la ecuación diferencial más sencilla
7

8 Ecuaciones diferenciales ordinarias. Conceptos básicos
que puede plantearse tendrá la expresión
F (t, x′(t)) = 0. (1.2)
Naturalmente, la ecuación (1.2) puede resultar aun muy complicada dependiendo de laforma de la función F , como por ejemplo en el caso F (t, x) = t2 + sen x + ex, que da lugar ala ecuación t2 + sen
(x′(t)
)+ ex′(t) = 0.
Una pequeña reflexión sobre la ecuación (1.2), lleva a la conclusión de que sin duda laforma más sencilla de ecuación diferencial ordinaria está dada por la identidad
x′(t) = f(t), (1.3)
problema clásico en los cursos básicos de análisis matemático y que no es otro que el delcálculo de primitivas. Así pues
el cálculo de primitivas es un ejemplo de ecuación diferencial ordinaria (1.4)
Precisamente utilizaremos este problema, que es objeto de un tratamiento extensivo enlos cursos básicos, para presentar de manera informal algunos de los aspectos relativos ala teoría de EDO. En todos los casos, y en aras a realizar una presentación lo más simpleposible, supondremos que todas las funciones involucradas tienen a R como su dominio dedefinición y son, al menos, continuas en él.
Cuando f es una función continua, las cuestiones esenciales planteadas en el problema(1.3), es decir la existencia y/o unicidad de soluciones, quedan contestadas por dos de losresultados fundamentales del Análisis Matemático de una variable: Por una parte, el Teorema
Fundamental del Cálculo establece que la función x(t) =
∫ t
0
f(s)ds es una solución del
problema. Por otra parte, como dos funciones son primitivas de la misma función si y sólo sila derivada de su diferencia es nula, el Teorema del Valor Medio determina que dos funcionesque sean solución del problema deben diferir en una constante. Así pues, la solución generalde (1.3) está dada por la identidad
x(t) = c +
∫ t
0
f(s)ds, c ∈ R. (1.5)
El anterior resultado es característico de las ecuaciones diferenciales. Los problemasplanteados tienen infinitas soluciones y en el caso de (1.3), que es una EDO es de primer or-den, el conjunto de sus soluciones depende de un parámetro. Para determinar unívocamente
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Introducción 9
una de tales soluciones hemos de fijar su valoren un punto concreto. Así, nos preguntamos sifijados t0, x0 ∈ R existirá alguna solución de (1.3) tal que x(t0) = x0. Para responder a estapregunta basta imponer a la solución general (1.5) que satisfaga dicha condición. Como
x0 = x(t0) = c +
∫ t0
0
f(s)ds,
resulta que c = x0 −∫ t0
0
f(s)ds y por tanto
x(t) = x0 +
∫ t
t0
f(s)ds, (1.6)
es la única solución de (1.3) que verifica que x(t0) = x0.
Podemos plantearnos ahora el problema
x′′(t) = f(t), (1.7)
que convendremos en denominar ecuación diferencial ordinaria de segundo orden y que sin lu-gar a dudas, representa el ejemplo más sencillo de ecuaciones de este tipo.
Es posible resolver la ecuación anterior empleando las técnicas relativas a las ecuacionesde primer orden. Para ello, consideraremos la función y(t) = x′(t). Entonces x es solución de(1.7) si y sólo si y es solución de (1.3), es decir si y sólo si y′(t) = f(t), y por tanto, teniendo
en cuenta (1.5), y(t) = c1 +
∫ t
0
f(s)ds, c1 ∈ R. Si consideramos ahora F (t) =
∫ t
0
f(s)ds,
entonces x es solución de (1.7) sii es solución de la ecuación de primer orden x′(t) = c1+F (t),lo que aplicando nuevamente (1.5), implica que
x(t) = c0 +
∫ t
0
[c1 + F (s)]ds = c0 + c1t +
∫ t
0
F (s)ds, c0, c1 ∈ R.
Por otra parte, si aplicamos la técnica de Integración por Partes y teniendo en cuentaque F ′ = f resulta que
∫ t
0
F (s)ds = sF (s)∣∣∣t
0−
∫ t
0
sf(s)ds = tF (t)−∫ t
0
sf(s)ds = t
∫ t
0
f(s)ds−∫ t
0
sf(s)ds
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

10 Ecuaciones diferenciales ordinarias. Conceptos básicos
y en definitiva que
x(t) = c0 + c1t +
∫ t
0
(t− s)f(s)ds, c0, c1 ∈ R. (1.8)
Como vemos la solución de una ecuación de segundo orden depende de dos parámetrosque se determinarán de forma unívoca si fijamos el valor de x y de x′ en un punto concreto
t0. Específicamente, como x′(t) = c1 +
∫ t
0
f(s)ds, resulta que
x0 = x(t0) = c0 + c1t0 +
∫ t0
0
(t0 − s)f(s)ds y x1 = x′(t0) = c1 +
∫ t0
0
f(s)ds
lo que implica que
c1 = x1 −∫ t0
0
f(s)ds,
c0 = x0 − x1t0 − t0
∫ t0
0
f(s)ds−∫ t0
0
(t0 − s)f(s)ds = x0 − x1t0 +
∫ t0
0
sf(s)ds
y por tanto que
x(t) = x0 − x1t0 +
∫ t0
0
sf(s)ds + x1t− t
∫ t0
0
f(s)ds +
∫ t
0
(t− s)f(s)ds.
En definitiva, la única solución de (1.7) que verifica que x(t0) = x0 y x′(t0) = x1 estádada por la identidad
x(t) = x0 + x1(t− t0) +
∫ t
t0
(t− s)f(s)ds. (1.9)
1.2. Un ejemplo de modelización: Sistemas de calor/frío
Si bien el sencillo ejemplo que hemos tratado en la introducción podría ser suficientepara motivar el estudio de ecuaciones diferenciales más generales, no cabe duda de que el
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Sistemas de calor/frío. El caso de un compartimento 11
tratamiento que se ha efectuado no requiere más técnicas que las conocidas en los cursosbásicos de cálculo. Es por ello que, previamente a la introducción más sistemática de losconceptos y problemas fundamentales de la teoría, estimamos conveniente plantear un pro-blema de la vida cotidiana cuya modelación matemática conduce a una ecuación diferencialordinaria que no puede ser resuelta sin la introducción de nuevas técnicas.
Desde el punto de vista físico, el fenómeno subyacente al problema que planteamos esel de la difusión de calor, que está regido por una ley experimental denominada ley deNewton. Además el modelo utilizado permitirá plantear problemas con una sola incógnita yproblemas con múltiples incógnitas, cuyos valores aparecen interrelacionados. Analizaremosde momento el caso que conduce a plantear problemas con una sola incógnita, que físicamentecorresponde a un único compartimento.
Consideremos un edificio con un solo compartimento, por ejemplo una nave industrial,y sean respectivamente x(t) y T (t) las temperaturas interior y exterior del edificio en elinstante t. La Ley de Newton del Enfriamiento establece que la variación de la temperaturainterior debida a la temperatura exterior es proporcional a la diferencia entre ambas, con unaconstante de proporcionalidad que depende sólo de las características físicas del edificio talescomo su aislamiento, el número de ventanas, etc. Además, es un hecho experimental que elcalor fluye de las zonas calientes a las frías, de forma que si la temperatura exterior es inferiora la interior entonces ésta debe disminuir mientras que si ocurre lo contrario, la temperaturainterior debería incrementarse. En términos matemáticos, esta propiedad determina que siT (t) ≥ x(t), entonces x′(t) ≥ 0, mientras que si T (t) ≤ x(t), entonces x′(t) ≤ 0. Por tanto,la Ley de Newton debe expresarse como
x′(t) = k(T (t)− x(t)
), k ≥ 0. (1.10)
Naturalmente, el valor k = 0 hace referencia a que el interior del edificio está completa-mente aislado del exterior, de forma que la variación de temperatura es nula. En este caso,es claro que la temperatura interior debe ser constante, lo que físicamente corresponde a unestado de equilibrio.
Si cuando k > 0 nos planteamos la posibilidad de que existan temperaturas de equilibrio,es decir temperaturas que permanezcan constantes en el tiempo, observamos que para queesto ocurra debe satisfacerse que si x es tal valor de la temperatura, necesariamente
0 = k(T (t)− x
), para cada t ∈ R,
y como k > 0, necesariamente T (t) = x para cada t ∈ R. Así pues, tenemos que sólo existentemperaturas de equilibrio si la temperatura exterior es constante, y en este caso el valor de latemperatura exterior es precisamente el de la temperatura de equilibrio, resultado por otra parteintuitivo desde la interpretación física del problema.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

12 Ecuaciones diferenciales ordinarias. Conceptos básicos
En cada instante t, la variación de temperatura interior también está afectada por otrosfactores como el calor producido por las máquinas que están funcionando en ese momento,las personas presentes en el edificio en ese instante, etc, incremento que será denotado porH(t). Por último, la variación de temperatura interior también se verá afectada por el calor ofrío que proporciona un sistema de aire acondicionado (caliente/frío) instalado en el edificio.Este sistema puede estar activado por un termostato que haga funcionar la calefacción o larefrigeración dependiendo de que la temperatura interior sea inferior o superior a una tem-peratura deseada x∗. En este caso, la variación de temperatura interior estará determinadapor U(t, x(t)), donde U : R× R −→ R debe verificar que para cada t, U(t, x) > 0 si x < x∗,U(t, x∗) = 0 y U(t, x) < 0 cuando x > x∗. El sistema de aire acondicionado se denominalineal si U(t, x) = α(t)(x∗ − x) donde α es una función continua y α(t) > 0.
En definitiva, la ecuación diferencial que determina la variación de temperatura interiorcon la presencia de un sistema lineal de aire acondicionado está dada por la igualdad
x′(t) = k(T (t)− x(t)
)+ α(t)
(x∗ − x(t)
)+ H(t), k ≥ 0, α(t) > 0, para cada t. (1.11)
Observar que si no tenemos en cuenta la influencia de máquinas, personas, etc, es decir siH = 0, y el edificio está aislado del exterior, es decir k = 0, entonces x∗ es precisamente unatemperatura de equilibrio, lo que de nuevo resulta intuitivo desde la interpretación física.
Tanto la identidad (1.10) como su generalización (1.11) son ecuaciones diferenciales or-dinarias de primer orden que, a diferencia del problema del cálculo de primitivas, involucratanto a derivada de la función incógnita como a la propia función.
Por otra parte, la experiencia del ejemplo del cálculo de primitivas sugiere que nueva-mente la solución del problema debe depender de una constante, que podrá determinarseunívocamente si en un instante dado es conocida la temperatura del edificio. Así pues, elproblema que plantearemos es el de si el conocimiento de la temperatura en un instanteconcreto, digamos que t0, es suficiente para determinar la evolución de la temperatura a lolargo del tiempo. En términos matemáticos, si el valor de la temperatura en t0 se sabe iguala x0 grados, la cuestión que planteamos es si el problema
x′(t) = k(T (t)− x(t)
)+ α(t)
(x∗ − x(t)
)+ H(t), x(t0) = x0 (1.12)
tiene una única solución.
1.3. Ecuaciones lineales de primer orden
Los problemas que estudiaremos en este apartado presentan la particularidad de quesu propia estructura permite concluir que cada problema de valores iniciales tiene solución
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Ecuaciones lineales de primer orden 13
global única, con lo que queda así completamente contestado el problema fundamental. Otraventaja adicional es que las propiedades cualitativas y cuantitativas de las ecuaciones y delos sistemas lineales generales ya están presentes en este caso, que por supuesto es el mássencillo que podemos plantear.
En lo sucesivo, con la expresión intervalo no trivial designaremos a un intervalo de R queni es vacío ni se reduce a un punto y que por tanto es o bien un subconjunto de la forma(a, b), (a, b], [a, b), [a, b] donde a, b ∈ R con a < b, o bien de la forma (−∞, a), (−∞, a],(a, +∞), [a, +∞) con a ∈ R o bien de la forma (−∞, +∞) = R.
Datos para una EDO lineal
• Intervalo no trivial: I ⊂ R.• Término Fuerza: f : I −→ R continua.• Coeficiente: a : I −→ R continua.
Fijados estos datos, una EDO lineal de primer orden consiste en encontrar todas funcionesx ∈ C1(I), es decir todas las funciones x : I −→ R derivables y con derivada continua quepara cada t ∈ I satisfacen la identidad:
x′(t) = a(t)x(t) + f(t). (1.13)
Cada función x ∈ C1(I) que satisfaga la anterior identidad se denomina solución de la EDO.
Observar que cuando la función coeficiente a es nula, el problema planteado coincide conel del cálculo de las primitivas del término fuerza f . Por otra parte, la elección a(t) = ky f(t) = kT (t) corresponde a la EDO (1.10) que describe variación de temperatura en unedificio, mientras que la elección a(t) = k +α(t) y f(t) = kT (t)+H(t)+α(t)x∗, correspondea la EDO (1.11) donde se tienen en cuenta la presencia de máquinas, personas y la actuaciónde un aire acondicioneado lineal de característica α y programado a temparatura x∗.
Supongamos ahora que x e y son dos soluciones de la EDO (1.13) y consideremos lafunción z : I −→ R definida como z(t) = x(t) − y(t) para cada t ∈ I. Entonces, para cadat ∈ I se tiene que
z′(t) = x′(t)− y′(t) = a(t)x(t) + f(t)− a(t)y(t)− f(t) = a(t)(x(t)− y(t)
)= a(t)z(t),
de manera que z es solución de la EDO lineal de primer orden
x′(t) = a(t)x(t), (1.14)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

14 Ecuaciones diferenciales ordinarias. Conceptos básicos
que en atención a que su término fuerza es nulo, se denomina homogénea. Recíprocamente,es sencillo comprobar que si y, z : I −→ R son respectivamente soluciones de las EDO (1.13)y (1.14), entonces la función x : I −→ R definida como x(t) = y(t) + z(t) para cada t ∈ I, esnuevamente solución de la EDO (1.13). En definitiva,
si y es una solución concreta de la EDO lineal x′(t) = a(t)x(t) + f(t), entoncescualquier otra solución se expresa como x = z + y donde z es una solución de laEDO homogénea z′(t) = a(t)z(t).
(1.15)
Este resultado es compatible con la fórmula (1.5) que determina la expresión de las
primitivas de f : x(t) =
∫ t
t0
f(s) ds con t0 ∈ I es una solución concreta de la EDO, mientras
que z es una solución de la EDO homogénea z′(t) = 0 sii z(t) = c, c ∈ R.En el caso de la EDO homogénea z′(t) = a(t)z(t) es posible describir todas sus soluciones
empleando recursos básicos de cálculo diferencial e integral de una variable. Comenzaremosobservando que si α : I −→ R es una primitiva de a en el intervalo I, por ejemplo podríamos
tomar α(t) =
∫ t
t0
a(s) ds para t0 ∈ I, entonces la EDO homogénea puede expresarse como
z′(t)− α′(t)z(t) = 0,
de manera que, multiplicando ambos términos de la anterior identidad por la función e−α(t),resulta que
e−α(t)z′(t)− α′(t)e−α(t)z(t) = 0 =⇒ (e−α(t)z(t)
)′= 0 =⇒ e−α(t)z(t) = c, c ∈ R.
En definitiva, las soluciones de (1.14) pueden caracterizarse de la manera siguiente:
Si α es una primitiva de la función coeficiente a, el conjunto de las soluciones dela EDO homogénea z′(t) = a(t)z(t) se expresa mediante la igualdad
z(t) = c eα(t), c ∈ R.
(1.16)
La búsqueda de una solución concreta de la EDO x′(t) = a(t)x(t) + f(t), con la quesegún (1.15) completaríamos de describir el conjunto de soluciones de la EDO en cuestión,puede obtenerse a partir de una sencilla, aunque quizá artificiosa y poco intuitiva, técni-ca denominada método de variación de las constantes o método de Lagrange y que consiste enbuscar una función c ∈ C1(I) de manera que y(t) = c(t) eα(t) sea solución de (1.13). Para queesto ocurra debe satisfacerse que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales de primer orden 15
a(t) y(t) + f(t) = y′(t) = a(t) c(t) eα(t)
︸ ︷︷ ︸y(t)
+c′(t) eα(t) =⇒ c′(t) = e−α(t)f(t),
de manera que c : I −→ R debe ser una primitiva de la función e−α(t)f(t). Así pues, teniendoen cuenta (1.15), las soluciones de (1.13) pueden caracterizarse de la manera siguiente:
Si α es una primitiva de la función coeficiente a, y c es una primitiva de la funcióne−α(t)f(t), el conjunto de las soluciones de la EDO lineal x′(t) = a(t)x(t) + f(t)se expresa mediante la igualdad
x(t) = eα(t)[c + c(t)
], c ∈ R.
(1.17)
Como vemos la solución general (1.17) de la EDO (1.13) posee un grado de libertad,la aconstante c, que intentaremos quede unívocamente determinado fijando el valor de lasolución en un punto concreto. En otros términos lo que nos planteamos ahora es el análisisde los denominados Problemas de Valor Inicial
x′(t) = a(t)x(t) + f(t), x(t0) = x0, donde t0 ∈ I y x0 ∈ R. (1.18)
Como la valoración en t0 de la solución general de (1.13) determina que
x0 = x(t0) = eα(t0)[c + c(t0)
]=⇒ c = x0e
−α(t0) − c(t0)
resulta que el valor de c queda unívocamente determinado por la condición inicial y además
x(t) = eα(t)[x0e
−α(t0) + c(t)− c(t0)]
= x0eα(t)−α(t0) + eα(t)
[c(t)− c(t0)
]. (1.19)
Observar que la expresión anterior determina que cada problema de valores iniciales plantea-do para la EDO lineal (1.13) tiene solución única. Más aún, un análisis un poco más deta-llado de la fórmula (1.19) que determina tal solución, permite representarla explícitamenteen términos de los datos del problema, es decir los iniciales t0 y x0 y también la funcióncoeficiente, del término fuerza. Para ello no hemos más que observar que aunque α es unaprimitiva cualquiera de a, α(t)− α(t0) representa la única primitiva de a que se anula en t0y análogamente c(t) − c(t0) representa la única primitiva de e−α(t)f(t) que se anula en t0 ypor tanto,
α(t)− α(t0) =
∫ t
t0
a(s) ds y c(t)− c(t0) =
∫ t
t0
e− R s
t0a(u) du
f(s) ds. (1.20)
En definitiva, tenemos el siguiente resultado:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

16 Ecuaciones diferenciales ordinarias. Conceptos básicos
Fórmula de Lagrange
Fijados I ⊂ R un intervalo no trivial y el coeficiente a ∈ C(I), entonces para cadat0 ∈ I, cada x0 ∈ R y cada f ∈ C(I), el problema de valores iniciales
x′(t) = a(t)x(t) + f(t), x(t0) = x0,
tiene solución única que además está dada por la identidad
x(t) = e
∫ t
t0
a(u) dux0 +
∫ t
t0
e−
∫ s
t0
a(u) duf(s) ds
.
La Fórmula de Lagrange puede expresarse también como
x(t) = x0e
∫ t
t0
a(u) du+
∫ t
t0
e
∫ t
s
a(u) duf(s) ds,
(1.21)
de manera que x(t) = z(t) + xp(t) donde
z(t) = x0e
∫ t
t0
a(u) duy xp(t) =
∫ t
t0
e
∫ t
s
a(u) duf(s) ds.
Es fácil comprobar que z es la única solución del problema de valor inicial z′(t) = a(t)z(t),z(t0) = x0, mientras que a su vez el segundo es la única solución del problema de valor inicialu′(t) = a(t)u(t) + f(t), u(t0) = 0. Esta descomposición de la única solución del problema devalor inicial x′(t) = a(t)x(t) + f(t), x(t0) = x0 como superposición (suma) de dos funcionesy la peculir expresión del segundo sumando, motiva la siguiente definición:
Función de GreenSi I ⊂ R es un intervalo no trivial y a ∈ C(I) denominaremosFunción de Green de la EDO x′(t) = a(t)x(t) a
g : I × I −→ R
(t, s) −→ e
∫ t
s
a(u) du
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales de primer orden 17
Observar que la función de Green de la EDO x′(t) = a(t)x(t) depende únicamente delcoeficiente a y además
para cada t0 ∈ I y cada f ∈ C(I), la función xp(t) =
∫ t
t0
g(t, s) f(s) ds, es la
única solución del problema de valor inicial x′(t) = a(t)x(t) + f(t), x(t0) = x0,(1.22)
es decir, la Fórmula de Lagrange tiene la siguiente manera alternativa de expresarse:
Para cada t0 ∈ I, x0 ∈ R y cada f ∈ C(I), la única solución del problema de valorinicial x′(t) = a(t)x(t) + f(t), x(t0) = x0 está determinada por la identidad
x(t) = g(t, t0) x0 +
∫ t
t0
g(t, s) f(s) ds,
donde g(t, s) = e
∫ t
s
a(u) dues la Función de Green de la EDO homogénea.
(1.23)
Si definimos K : I × I −→ R como K(t, s) = g(t, s) f(s), entonces K(t, t) = f(t) resulta
que a(t)g(t, s) f(s) =
(∂g
∂t
)
(t,s)
f(s) =
(∂K
∂t
)
(t,s)
, puesto que g(t, s) =
∫ t
s
a(u) du. Por
tanto,
x′p(t) = a(t)xp(t) + f(t) = a(t)
∫ t
t0
g(t, s) f(s) ds + f(t) =
∫ t
t0
(∂K
∂t
)
(t,s)
ds + K(t, t).
Aunque en este caso el valor x′p ha sido hallado directamente por ser g conocida, en elresto del curso será útil el siguiente resultado que generaliza la situación anterior.
Regla de Leibnitz de derivación bajo el signo
Si K : I × I −→ R es continua y existe y es continua∂K
∂t: I × I −→ R, entonces
para cada φ, ψ ∈ C1(I) la función x : I −→ R definida como x(t) =
∫ ψ(t)
φ(t)
K(t, s) ds
es de clase C1(I) y además
x′(t) =
∫ ψ(t)
φ(t)
(∂K
∂t
)
(t,s)
ds + K(t, ψ(t)
)ψ′(t)−K
(t, φ(t)
)φ′(t).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
18 Ecuaciones diferenciales ordinarias. Conceptos básicos
Para la demostración de la Regla de Leibnitz, puede consultarse, por ejemplo el Teorema12.8 del texto Apostol, T., Análisis Matemático, Ed. Reverté.
Cuando el coeficiente de la EDO (1.13) es constante, es decir a(t) = a para cada t ∈ R,entonces
Fórmula de Lagrange con coeficiente constante
g(t, s) = ea(t−s) es la Función de Green de la EDO x′(t) = ax(t) y dados t0 ∈ I,x0 ∈ R y f ∈ C(I), el problema de valores iniciales
x′(t) = a x(t) + f(t), x(t0) = x0,
tiene como única solución a la función
x(t) = x0ea(t−t0) +
∫ t
t0
ea(t−s)f(s) ds.
1.4. Ecuaciones de variables separables
Las ecuaciones lineales de primer orden abordadas en la sección anterior proporcionanun marco teórico suficientemente rico como para describir explícitamente la solución denumerosos procesos físicos, cuyas propiedades pueden por tanto determinarse a partir delas dichas soluciones. No obstante, en muchas ocasiones tales sistemas físicos muestran uncomportamiento no lineal, es decir no se satisface el principio de superposición, de manera quelas ecuaciones lineales no representan más que aproximaciones de las ecuaciones diferencialesque determinan el estado del sistema.
El objetivo de esta sección es describir un método elemental de resolución de algunas EDOde primer orden, concretamente las que denominaremos de variables separables, para poderdisponer así de más ejemplos concretos de EDO cuyas soluciones pueden ser obtenidas ex-plícitamente. Como veremos, las EDO de variables separables representan una generalizaciónal caso no lineal de las EDO lineales homogéneas y su técnica de resolución se reduce enesencia al cálculo de primitivas, si bien con un proceso algo más elaborado que el desarrolladoen la Introducción y que ya quedó esbozado en la resolución de las EDO lineales homogéneas.
La diversidad de situaciones que pueden presentarse en las EDO de variables separables,configuran un panorama lo suficientemente rico como para poder mostrar la profundidad delas cuestiones planteadas en el marco de lo que hemos denominado problema fundamental, sinque por ello se necesiten para su análisis más que recursos básicos delCálculo Infinitesimal.Nos preocuparemos de determinar bajo qué condiciones los problemas de valor inicial tienen
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de variables separables 19
solución única . Como veremos, para esta cuestión será decisiva la presencia o no de solucionesde equilibrio y el comportamiento de la función que define la EDO en torno a dichos puntos.
Aunque el concepto de EDO en variables separables puede definirse en un contexto lige-ramente más general, ver por ejemplo [?], el problema que analizaremos en esta sección esel que corresponde a tomar los datos siguientes:
Datos para EDO de variables separables
• Los intervalos no triviales I, J ⊂ R.• Las funciones continuas y no nulas g : I −→ R y f : J −→ R.
Fijados estos datos, una EDO de primer orden de variables separables consiste en encontrartodas funciones x ∈ C1(I), donde I ⊂ I es un subintervalo no trivial, que para cada t ∈ Isatisfacen la identidad:
x′(t) = g(t) f(x(t)
). (1.24)
Nuevamente, cada función x ∈ C1(I), I ⊂ I, que satisfaga la anterior identidad se de-nomina solución de la EDO.
Observar que cuando f(x) = k para cada x ∈ R, k ∈ R, es decir si f es una funciónconstante, (1.24) no es más que el problema de cálculo de primitivas de la función k g(t),mientras que si f(x) = x para cada x ∈ R, es decir si f es la función identidad, entonces(1.24) no es más que la EDO lineal homogénea de primer orden con coeficiente g(t). En estoscasos sabemos que todas las soluciones de la EDO están definidas en el intervalo I, peroesta propiedad no tiene porqué ser cierta en otras situaciones, lo que justifica la definiciónde solución que hemos introducido. Ilustraremos esta particularidad con algunos ejemplosen los cuales siempre tenemos I = J = R
Ejemplo 1: La ecuación x′(t) = −x2(t), donde g(t) = 1 y f(x) = −x2, tiene como solu-ciones
x(t) = 0 y las funciones de la forma xc(t) =1
t− c, c ∈ R. (1.25)
Es claro que el intervalo de definición de x es R. Respecto del resto de soluciones, hayque señalar que si bien para cada c ∈ R la función xc está definida en el conjunto H =R \ {−c} y satisface que x′(t) = −x2(t) para cada t ∈ H, no es solución de la EDO en H. Elmotivo es que cada solución de una EDO debe tener como dominio de definición un intervalo y
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

20 Ecuaciones diferenciales ordinarias. Conceptos básicos
obviamente H no lo es. De hecho, las funciones
x−c : (−∞, c) −→ R,
t −→ 1
t− c
x+c : (c, +∞) −→ R
t −→ 1
t− c
(1.26)
son soluciones de la EDO. En la Figura 1.1 se representan las soluciones de la EDO corres-pondientes a distintos valores de la constante c. En el semiplano superior aparecen las de laforma x+
c , mientras que en el semiplano inferior se representan las de la forma x−c .
x(t)=0
c=4c=3c=2c=1c=0c=-1c=-2c=-3c=-4
c=4c=3c=2c=1c=0c=-1c=-2c=-3c=-4
t
x
0
Figura 1.1: Soluciones de la EDO x′(t) = −x2(t).
Con este ejemplo hemos comprobado que es preciso determinar el dominio de definición delas funciones para que éstas sean consideradas como soluciones y que una ley de asignaciónno tiene porqué describir una solución sino que, como ha ocurrido aquí, varias solucionespueden estar definidas por la misma ley.
Por otra parte, hemos comprobado también que dos soluciones diferentes tienen intervalosde definición distintos.
Ejemplo 2: La ecuación x′(t) = 2tx2(t), donde g(t) = 2t y f(x) = x2, tiene como solu-ciones
x(t) = 0 y las funciones de la forma xc(t) =1
c− t2, c ∈ R. (1.27)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Ecuaciones de variables separables 21
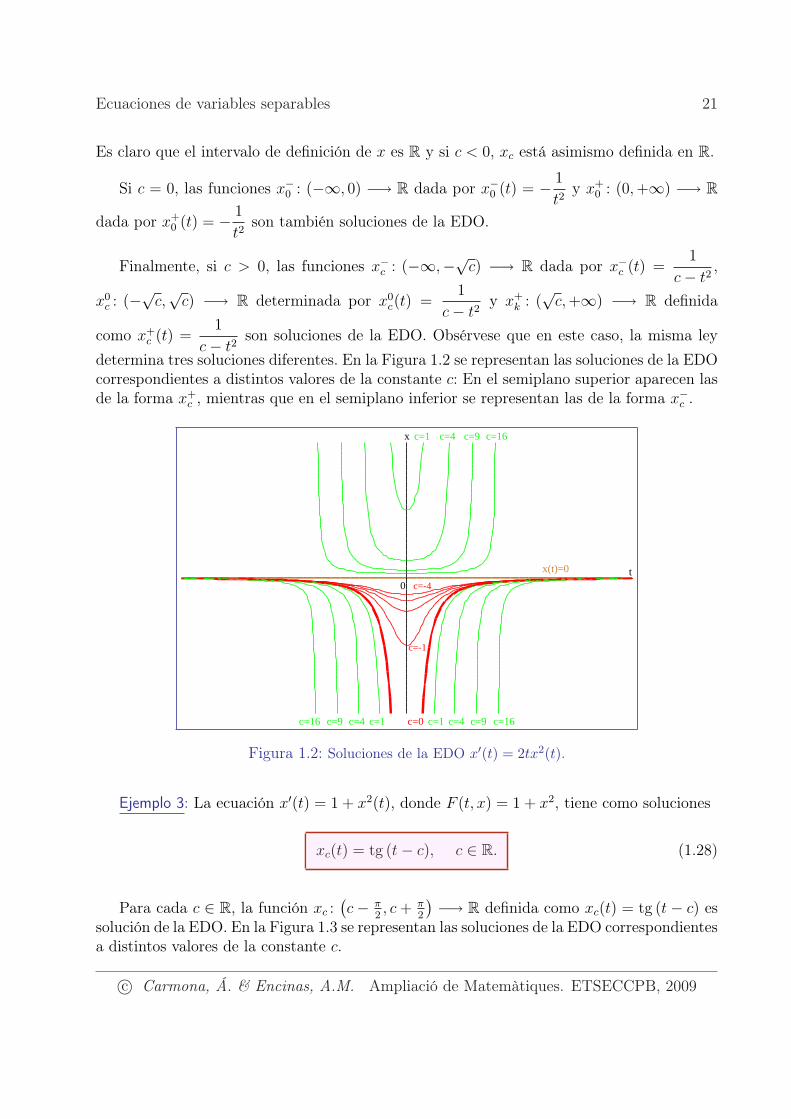
Es claro que el intervalo de definición de x es R y si c < 0, xc está asimismo definida en R.
Si c = 0, las funciones x−0 : (−∞, 0) −→ R dada por x−0 (t) = − 1
t2y x+
0 : (0, +∞) −→ R
dada por x+0 (t) = − 1
t2son también soluciones de la EDO.
Finalmente, si c > 0, las funciones x−c : (−∞,−√c) −→ R dada por x−c (t) =1
c− t2,
x0c : (−√c,
√c) −→ R determinada por x0
c(t) =1
c− t2y x+
k : (√
c, +∞) −→ R definida
como x+c (t) =
1
c− t2son soluciones de la EDO. Obsérvese que en este caso, la misma ley
determina tres soluciones diferentes. En la Figura 1.2 se representan las soluciones de la EDOcorrespondientes a distintos valores de la constante c: En el semiplano superior aparecen lasde la forma x+
c , mientras que en el semiplano inferior se representan las de la forma x−c .
0t
x
c=1 c=4 c=9 c=16
x(t)=0
c=-4
c=-1
c=0c=1c=4c=9c=16
c=1 c=4 c=9 c=16
Figura 1.2: Soluciones de la EDO x′(t) = 2tx2(t).
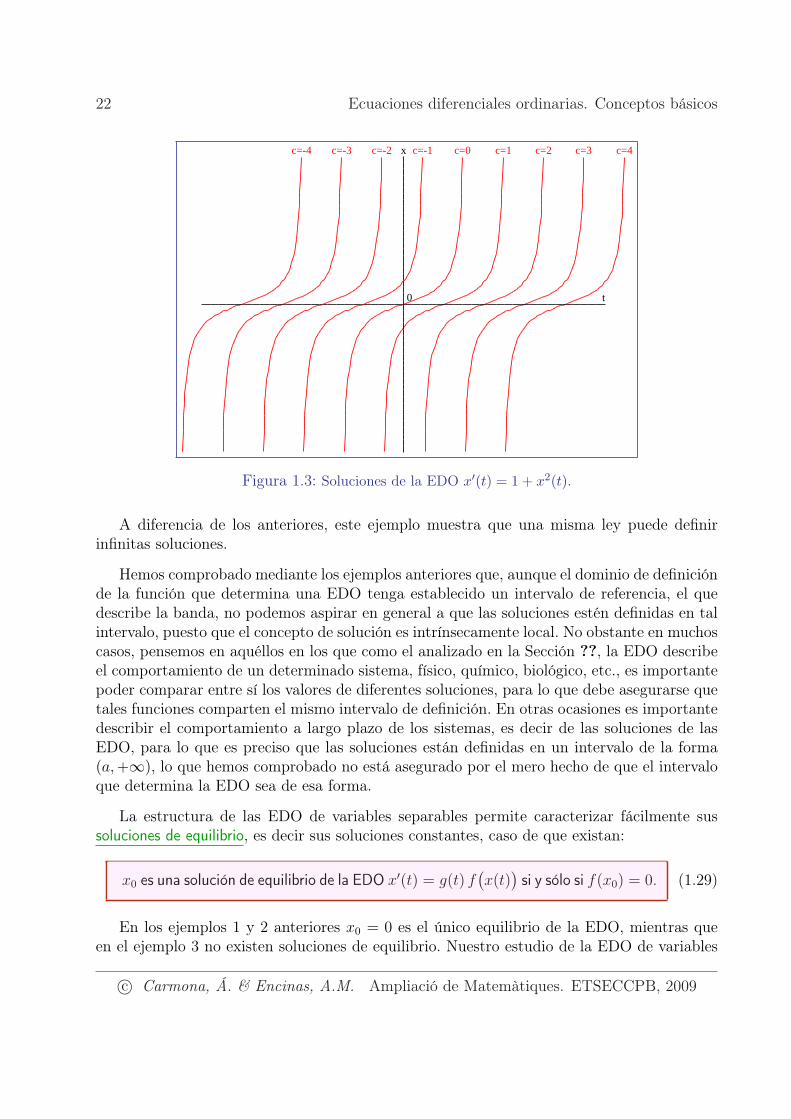
Ejemplo 3: La ecuación x′(t) = 1 + x2(t), donde F (t, x) = 1 + x2, tiene como soluciones
xc(t) = tg (t− c), c ∈ R. (1.28)
Para cada c ∈ R, la función xc :(c− π
2, c + π
2
) −→ R definida como xc(t) = tg (t− c) essolución de la EDO. En la Figura 1.3 se representan las soluciones de la EDO correspondientesa distintos valores de la constante c.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
22 Ecuaciones diferenciales ordinarias. Conceptos básicos
c=4c=3c=2c=1c=0c=-1c=-2c=-3c=-4
t
x
0
Figura 1.3: Soluciones de la EDO x′(t) = 1 + x2(t).
A diferencia de los anteriores, este ejemplo muestra que una misma ley puede definirinfinitas soluciones.
Hemos comprobado mediante los ejemplos anteriores que, aunque el dominio de definiciónde la función que determina una EDO tenga establecido un intervalo de referencia, el quedescribe la banda, no podemos aspirar en general a que las soluciones estén definidas en talintervalo, puesto que el concepto de solución es intrínsecamente local. No obstante en muchoscasos, pensemos en aquéllos en los que como el analizado en la Sección ??, la EDO describeel comportamiento de un determinado sistema, físico, químico, biológico, etc., es importantepoder comparar entre sí los valores de diferentes soluciones, para lo que debe asegurarse quetales funciones comparten el mismo intervalo de definición. En otras ocasiones es importantedescribir el comportamiento a largo plazo de los sistemas, es decir de las soluciones de lasEDO, para lo que es preciso que las soluciones están definidas en un intervalo de la forma(a, +∞), lo que hemos comprobado no está asegurado por el mero hecho de que el intervaloque determina la EDO sea de esa forma.
La estructura de las EDO de variables separables permite caracterizar fácilmente sussoluciones de equilibrio, es decir sus soluciones constantes, caso de que existan:
x0 es una solución de equilibrio de la EDO x′(t) = g(t) f(x(t)
)si y sólo si f(x0) = 0. (1.29)
En los ejemplos 1 y 2 anteriores x0 = 0 es el único equilibrio de la EDO, mientras queen el ejemplo 3 no existen soluciones de equilibrio. Nuestro estudio de la EDO de variables
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Ecuaciones de variables separables 23
separables (1.24) se basará en la existencia o no de soluciones de equilibrio. En aras de lasimplicidad nos limitaremos exclusivamente a analizar el caso en el que la EDO o bien notiene soluciones de equilibrio o bien tiene una única solución de equilibrio. Los razonamientosefectuados en esta última situación pueden extenderse sin demasiadas dificultades al caso enel que la EDO tiene una cantidad finita de equilibrios, o incluso a cuando existe una cantidadinfinita numerable de equilibrios aislados.
1.4.1. El caso en el que no existen soluciones de equilibrio
Tal y como hemos mostrado en (1.29) la EDO no presenta soluciones de equilibrio sii lafunción f no se anula en J . Como f es una función continua, el Teorema de Bolzano implicaque f tiene signo constante y no existe pérdida de generalidad si se supone que f(x) > 0 paracada x ∈ J pues en otro caso cambiaríamos en la EDO x′(t) = g(t) f
(x(t)
)la función f por
−f y la función g por −g para dar lugar a la misma EDO con la hipótesis de positividadpara el segundo dato. Por tanto, a lo largo de este apartado supondremos que f(x) > 0 paracada x ∈ R. Con esta hipótesis, la EDO x′(t) = g(t) f
(x(t)
)es equivalente a la identidad
x′(t)f(x(t)
) = g(t), t ∈ I, (1.30)
lo que como veremos a continuación reduce su resolución al cálculo de primitivas. Concreta-
mente, si consideremos G : I −→ R una primitiva de g y H : J −→ R una primitiva de1
f,
entonces la identidad (1.30) es equivalente a la igualdad
H ′(x(t))
= G′(t), t ∈ I, (1.31)
de manera que las soluciones de la EDO (1.24) quedan determinadas implícitamente por lafórmula
H(x(t)
)= G(t) + c, para todo t ∈ I, donde c ∈ R. (1.32)
Nuestro próximo objetivo es despejar x(t) en la anterior identidad para así obtener unaexpresión explícita de las soluciones de la EDO y más concretamente de cada problema devalores iniciales
x′(t) = g(t) f(x(t)
), x(t0) = x0, t0 ∈ I, x0 ∈ J . (1.33)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

24 Ecuaciones diferenciales ordinarias. Conceptos básicos
Como fijados t0 ∈ I y x0 ∈ J , si x es solución del problema de valores iniciales (1.33),necesariamente debe verificar (1.32), obtenemos que c = H(x0) − g(t0), de forma que laexpresión implícita de la o las soluciones de (1.33) está dada por
H(x(t)
)−H(x0) = g(t)− g(t0).
Teniendo en cuenta que Gt0(t) = g(t) − g(t0) es la única primitiva de g que se anula en
t0 y que Hx0(x) = H(x) − H(x0) es asimismo la única primitiva de1
fque se anula en x0,
resulta que Gt0(t) =
∫ t
t0
g(s) ds, para cada t ∈ I, Hx0(x) =
∫ x
x0
dz
f(z), para cada x ∈ J y por
tanto, la o las soluciones de (1.33) están determinadas implícitamente por la igualdad
∫ x(t)
x0
dz
f(z)=
∫ t
t0
g(s) ds. (1.34)
Consideremos ahora a = ınf{J} y b = sup{J}, de manera que o bien J = (a, b), o bienJ = (a, b], o bien J = [a, b) o bien J = [a, b] y no se excluye que a = −∞ o b = +∞. Como
H ′x0
(z) =1
f(z)> 0, tenemos que Hx0 es estrictamente creciente, lo que implica que tienen
sentido los valores
αx0 = −∫ x0
a
dz
f(z)= lım
x→a+
∫ x
x0
dz
f(z)y βx0 =
∫ b
x0
dz
f(z)= lım
x→b−
∫ x
x0
dz
f(z)
y que además se satisface que −∞ ≤ αx0 < 0 < βx0 ≤ +∞, Hx0 : (a, b) −→ (αx0 , βx0) esbiyectiva y H−1
x0∈ C1
((αx0 , βx0)
).
Por otra parte, como Gt0 es continua y satisface que Gt0(t0) = 0 ∈ (αx0 , βx0), existe unintervalo I ⊂ I tal que t0 ∈ I y además Gt0(t) ∈ (αx0 , βx0) para cada t ∈ I. Si It0x0 ⊂ I es elmayor intervalo, en el sentido de la inclusión, con la propiedad anterior, entonces la funcióndefinida como
x(t) = H−1x0
(∫ t
t0
g(s) ds
), t ∈ It0x0 (1.35)
es la única solución del problema de valores iniciales (1.33).
En general, It0x0 , el intervalo de definición de la solución del problema anterior, no tieneporqué coincidir con I. Por ejemplo, de manera que las soluciones maximales serán solucioneslocales. Esto es lo que ocurre en el Ejemplo 3 anterior: En este caso, I = R, g(t) = 1 y
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de variables separables 25
f(x) = 1 + x2, lo que implica que Gt0(t) = t − t0 y Hx0(x) = arctg(x) − arctg(x0), dondearctg(x) es la rama principal de esta función es decir, la definida en el intervalo
( − π2, π
2
).
Por tanto tenemos que
αx0 = −π
2− arctg(x0), βx0 =
π
2− arctg(x0) y H−1
x0(x) = tg
(x + arctg(x0)
).
Entonces, t−t0 ∈(− π
2−arctg(x0),
π2−arctg(x0)
)sii t ∈ (
t0+arctg(x0)− π2, t0+arctg(x0)+
π2
),
lo que implica que
x :(t0 + arctg(x0)− π
2, t0 + arctg(x0) + π
2
) −→ R dada por x(t) = tg(t− t0 + arctg(x0)
)
es la única solución del problema de valores iniciales x′(t) = 1 + x2(t), x(t0) = x0.
Por tanto, para poder garantizar que It0x0 = I, debemos imponer condiciones adicionalessobre las funciones g y f y más concretamente sobre sus primitivas Gt0 y Hx0 , respectiva-mente. Así, si se verifica que αx0 < ınf
t∈IGt0(t) ≤ sup
t∈IGt0(t) < βx0 , entonces Gt0(t) ∈ (αx0 , βx0)
para cada t ∈ I y por tanto Jt0x0 = I. En particular, las anteriores desigualdades están garan-
tizadas para cada t0 ∈ I y cada x0 ∈ J si se satisface que∫ c
a
dz
f(z)=
∫ b
c
dz
f(z)= +∞, donce
c ∈ J . En resumen, tenemos el siguiente resultado que describe la solución del problema devalor inicial (1.33):
Si f(x) > 0 para cada x ∈ R, entonces para cada t0 ∈ I y cada x0 ∈ J el problemade valores iniciales x′(t) = g(t) f
(x(t)
), x(t0) = x0 tiene una única solución que
está determinada implícitamente por la identidad∫ x(t)
x0
dz
f(z)=
∫ t
t0
g(s) ds. La
solución está definida en I si además se satisface que
−∫ x0
a
dz
f(z)≤ ınf
t∈I
∫ t
t0
g(s) ds ≤ supt∈I
∫ t
t0
g(s) ds ≤∫ b
x0
dz
f(z).
En particular, esto ocurre si fijado c ∈ J ,∫ c
a
dz
f(z)=
∫ b
c
dz
f(z)= +∞.
(1.36)
Observar que en el Ejemplo 3, ınft∈I
∫ t
t0
g(s) ds = −∞ y supt∈I
∫ t
t0
g(s) ds = +∞, mientras
que∫ +∞
0
dz
f(z)= lım
x→+∞arc tg x =
π
2y
∫ 0
−∞
dz
f(z)= − lım
x→+∞arc tg x = −π
2, lo que hace que
no se satisfaga la hipótesis que asegura que las soluciones están definidas en I = R, que enese caso es el intervalo de referencia.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

26 Ecuaciones diferenciales ordinarias. Conceptos básicos
1.4.2. El caso en el que existe una única solución de equilibrio
En este apartado abordaremos el estudio de los problemas de valor inicial para la EDOen variables separables x′(t) = g(t) f
(x(t)
)con la hipótesis adicional de que existe una única
solución de equilibrio, o después de la caracterización de tales soluciones (1.29), bajo lahipótesis de que la función f tiene un único cero en J que denotaremos como x∗. Observarque ésta es la situación de las EDO lineales y homogéneas de primer orden y también delos dos primeros ejemplos anteriores en los que además x∗ = 0. Por tanto, en este apartadosupondremos que f(x∗) = 0 y que f(x) 6= 0 para cada x ∈ R con x 6= x∗.
A diferencia del estudio efectuado en la sección precedente, en lugar de describir primerotodas las soluciones de la EDO y posteriormente la de cada problema de valor inicial, en estecaso describiremos directamente la o las soluciones de cada problema de valores iniciales.Consideremos pues fijados t0 ∈ I, x0 ∈ R y el problema de valores iniciales
x′(t) = g(t) f(x(t)
), x(t0) = x0. (1.37)
Consideremos también Gt0(t) =
∫ t
t0
g(s) ds, la única primitiva de g en el intervalo I que
se anula en t0. Además, si x0 6= x∗ la función Hx0(x) =
∫ x
x0
dz
f(z)está definida en R \ {x∗} y
si x0 < x∗ su restricción a (−∞, x∗) es la única primitiva de1
fen (−∞, x∗) que se anula en
x0, mientras que si x0 > x∗ su restricción a (x∗, +∞) es la única primitiva de1
fen (x∗, +∞)
que se anula en x0. Siguiendo los razonamientos efectuados en el apartado anterior, resultaque si x0 6= x∗, la expresión
∫ x(t)
x0
dz
f(z)=
∫ t
t0
g(s) ds (1.38)
define implícitamente una solución del problema de valores iniciales planteado y tal quesi I ⊂ I es su intervalo de definición, entonces x : I −→ (−∞, x∗) si x0 < x∗ mientras quex : I −→ (x∗, +∞) si x0 > x∗. Al igual que en el caso en el que no existen equilibrios podemostomar It0x0 ⊂ I el mayor intervalo, en el sentido de la inclusión tal que x(t) ∈ (−∞, x∗)cuando x0 < x∗ o tal que x(t) ∈ (x∗, +∞) cuando x0 > x∗.
Analizaremos la situación solamente cuando x0 < x∗, pues un estudio análogo puedehacerse para describir el comportamiento de la o las soluciones cuando x0 > x∗ y nuevamenteconsideraremos los valores a = ınf{J} y b = sup{J}.
Podemos suponer, sin pérdida de generalidad, que f(z) > 0 para cada z ∈ (a, x∗) loque implica que Hx0 es estrictamente creciente en dicho intervalo, que existen los valores
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de variables separables 27
αx0 = −∫ x0
a
dz
f(z), βx0 =
∫ x∗
x0
dz
f(z)y que además −∞ ≤ αx0 < 0 < βx0 ≤ +∞. Como
Hx0 : (−∞, x∗) −→ (αx0 , βx0) es biyectiva, la función x(t) = H−1x0
(∫ t
t0
g(s) ds
), t ∈ It0x0 es
solución del problema de valores iniciales (1.37). Tenemos ahora los siguientes resultados:
• Si para cada t ∈ I se satisface que∫ t
t0
g(s) ds < βx0 , entonces la función x(t) definida
anteriormente es la única solución de (1.37). En particular esto ocurre si βx0 = +∞.
• Si βx0 ∈ R y existe t ∈ I tal que∫ t
t0
g(s) ds = βx0 , podemos tomar
t1 = ınf
{t ∈ I :
∫ t
t0
g(s) ds = βx0
}.
Entonces t1 ∈ I y satisface que t0 < t1 e∫ t1
t0
g(s) ds = βx0 , es decir es el menor valor
de I tal que tiene esta propiedad, t1 = sup It0x0 y la función x(t) = H−1x0
(∫ t
t0
g(s) ds
)
satisface que x(t) 6= x∗ si t ∈ It0x0 y además lımt→t1
x(t) = x∗. Si ahora consideramos el
intervalo I = It0x0 ∪ {t ∈ I : t ≥ t1} y la función z : I −→ R definida como z(t) = x(t)si t ∈ It0x0 y como z(t) = x∗ si t ≥ t1, entonces aplicando el resultado de prolongaciónde soluciones resulta que z es una solución de (1.37) que prolonga a x. Esto implicaque el problema de valores iniciales x′(t) = g(t) f
(x(t)
), x(t1) = x∗ tiene al menos dos
soluciones distintas.
Como consecuencia del primero de los dos resultados anteriores, resulta que si f ∈ C1(J),entonces como f ′ ∈ C(J) y [x0, x
∗] ⊂ J para cada x0 < x∗, existe M > 0 tal que
f(z) = |f(z)| = |f(z)− f(x∗)︸ ︷︷ ︸0
| ≤ M |z − x∗| = M(z − x∗), para cada z ∈ [x0, x∗],
lo que implica que +∞ =1
M
∫ x∗
x0
dz
z − x∗≤
∫ x∗
x0
dz
f(z), de manera que βx0 = +∞. Haciendo
el mismo razonamiento para x0 > x∗, obtenemos que
Si f ∈ C1(J), entonces para cada t0 ∈ I y cada x0 ∈ J el problema de valoresiniciales x′(t) = g(t) f
(x(t)
), x(t0) = x0 tiene una única solución. (1.39)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

28 Ecuaciones diferenciales ordinarias. Conceptos básicos
Comprobaremos con un ejemplo como si no se satisface la anterior hipótesis de regularidadpar ala función f , entonces pueden existir problemas de valor inicial con múltiples soluciones:
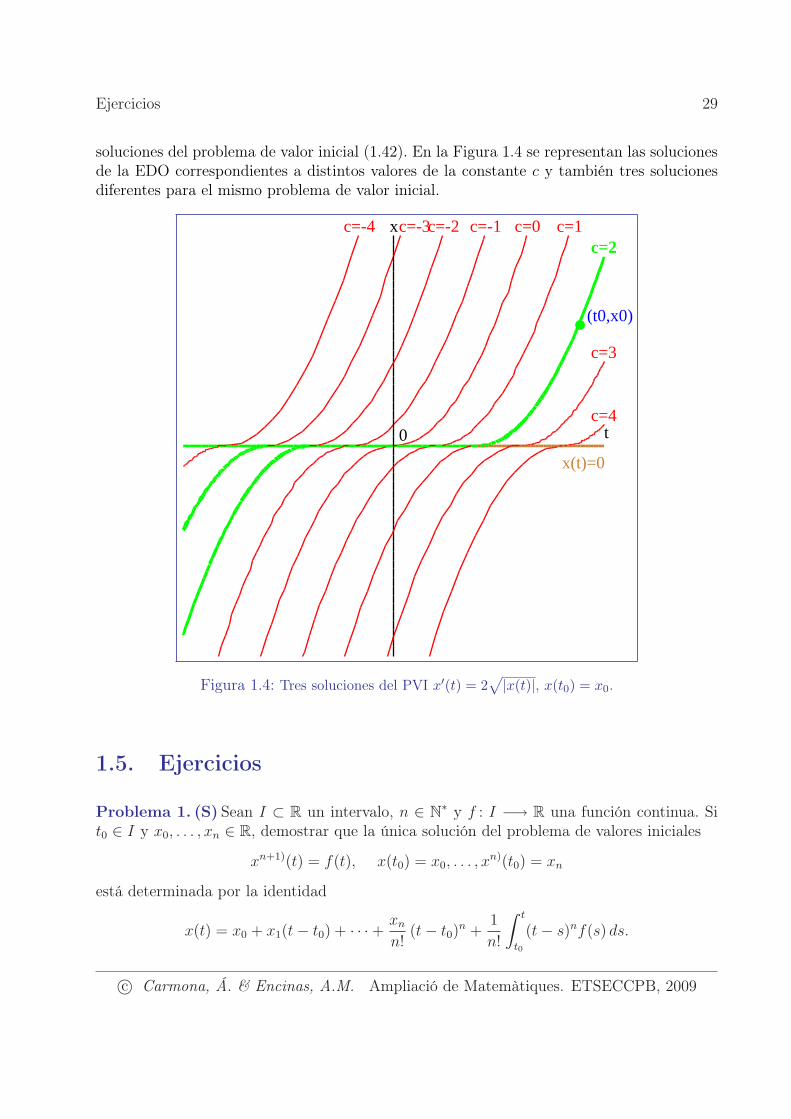
Ejemplo 4: La ecuación x′(t) = 2√|x(t)|, donde I = J = R, g(t) = 1 y f(x) = 2
√|x|,
tiene como soluciones
x(t) = 0 y las funciones xc(t) =
−(t− c)2, si t < c,
0, si t = c,
(t− c)2, si t > c,
donde c ∈ R. (1.40)
Las soluciones descritas en (1.40) no determinan todas las soluciones posibles de la EDO.Por ejemplo, la función
xcc(t) =
−(t− c)2, si t < c,
0, si c ≤ t ≤ c,
(t− c)2, si t > c,
donde c ≤ c (1.41)
es también solución de la EDO. Así, si tomamos t0, x0 ∈ R, y consideramos el problema devalores iniciales
x′(t) = 2√|x(t)|, x(t0) = x0, (1.42)
entonces si x0 > 0, para cada c ≤ t0 −√x0, las funciones
xc(t) =
−(t− c)2, si t < c,
0, si c ≤ t ≤ t0 −√x0,(t− t0 +
√x0
)2, si t > t0 −√x0,
(1.43)
son todas las soluciones del problema de valor inicial (1.42), mientras que si x0 < 0, paracada c ≥ t0 +
√−x0, las funciones
xc(t) =
−(t− t0 −
√−x0
)2, si t < t0 +
√−x0,
0, si t0 +√−x0 ≤ t ≤ c,(
t− c)2, si t > c,
(1.44)
son todas las soluciones del problema de valor inicial (1.42) y finalmente si x0 = 0, entoncesx(t) = 0 y las funciones xcc definidas en (1.41) y donde donde c ≤ t0 ≤ c, son todas las
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Ejercicios 29
soluciones del problema de valor inicial (1.42). En la Figura 1.4 se representan las solucionesde la EDO correspondientes a distintos valores de la constante c y también tres solucionesdiferentes para el mismo problema de valor inicial.
(t0,x0).
x(t)=0
c=2
c=4
c=3
c=1c=0c=-1c=-2c=-3c=-4
t
x
0
Figura 1.4: Tres soluciones del PVI x′(t) = 2√|x(t)|, x(t0) = x0.
1.5. Ejercicios
Problema 1. (S) Sean I ⊂ R un intervalo, n ∈ N∗ y f : I −→ R una función continua. Sit0 ∈ I y x0, . . . , xn ∈ R, demostrar que la única solución del problema de valores iniciales
xn+1)(t) = f(t), x(t0) = x0, . . . , xn)(t0) = xn
está determinada por la identidad
x(t) = x0 + x1(t− t0) + · · ·+ xn
n!(t− t0)
n +1
n!
∫ t
t0
(t− s)nf(s) ds.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

30 Ecuaciones diferenciales ordinarias. Conceptos básicos
Problema 2. Sean I ⊂ R un intervalo, a, f : I −→ R funciones continuas y consideremosla EDO lineal x′(t) = a(t) x(t) + f(t). Demostrar que si x1, x2, x3 son soluciones de la EDO,
distintas entre sí, entonces su razón simple, es decirx1 − x2
x1 − x2
una función constante.
Problema 3. Sean I ⊂ R un intervalo, t0 ∈ I, x0 ∈ R, a, f, g : I −→ R funciones continuasy consideremos x y z las únicas soluciones de los problemas de valores iniciales linealesx′(t) = a(t) x(t) + f(t), x(t0) = x0 y z′(t) = a(t) z(t) + g(t), z(t0) = x0.
Si f(t) ≥ g(t) para cada t ∈ I, demostrar que x(t) ≥ z(t) para cada t ≥ t0 y quex(t) ≤ z(t) para cada t ≤ t0.
Problema 4. Supongamos que a, f : R→ R son continuas y periódicas de periodo T > 0.
Demostrar que si x es una solución solución de la EDO lineal x′(t) = a(t)x(t) + f(t),entonces la función y definica como y(t) = x(t + T ) para cada t ∈ R es también solución dela EDO. Concluir que x es periódica de período T si y sólo si x(0) = X(T ).
Problema 5. Supongamos que a : R → R es continua y periódica de periodo T > 0 y
consideremos k =1
T
∫ T
0
a(s)ds, el valor medio de a.
Demostrar que si x es una solución solución de la EDO lineal x′(t) = a(t)x(t), entoncesx(t + T ) = x(t)eTk para cada t ∈ R.
Demostrar también que existe una función p ∈ C1(R), periódica de periodo T y tal quex(t) = p(t)ekt para cada t ∈ R. Concluir que si k = 0 toda solución de x′(t) = a(t)x(t) esperiódica y por tanto acotada, si k > 0, lım
t→+∞|x(t)| = +∞ y si k < 0, lım
t→+∞x(t) = 0.
Problema 6. Supongamos que a, f : R→ R son continuas y periódicas de periodo T > 0 y
consideremos k =1
T
∫ T
0
a(s)ds, el valor medio de a y α =
∫ T
0
e−
∫ s
0
a(u) duf(s) ds.
Demostrar que si k 6= 0, entonces la EDO lineal x′(t) = a(t)x(t) + f(t) tiene una únicasolución de período T .
Demostrar que si k = 0 y además α = 0, entonces toda solución de la EDO linealx′(t) = a(t)x(t) + f(t) es periódica de período T .
Demostrar que si k = 0 y además α 6= 0, entonces ninguna solución de la EDO linealx′(t) = a(t)x(t) + f(t) es periódica de período T .
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 31
Problema 7. Sean el intervalo I ⊂ R y las funciones a, f : I −→ R tales que a es continuay f es continua excepto en los puntos t1, . . . , tk, con discontinuidad de primera especie. Sedenomina solución generalizada de la EDO x′(t) = a(t)x(t)+f(t) a toda función x : I −→ Rcontinua en I, derivable en I \ {t1, . . . , tk} y tal que satisfaga la identidad
x′(t) = a(t)x(t) + f(t), t ∈ I \ {t1, . . . , tk}.
Demostrar para cada t0 ∈ I y cada x0 ∈ R la función
x(t) = e
∫ t
t0
a(s) dsx0 +
∫ t
t0
e−
∫ s
t0
a(u) duf(s) ds
, t ∈ I
es solución generalizada de la EDO que además la única que satisface que x(t0) = x0.Concluir que el problema de valores iniciales para una EDO lineal tiene una única solucióngeneralizada que además es una función seccionalmente derivable.
Problema 8. (S) Si k ≥ 0, resolver el problema de valor inicial
x′(t) = k(T (t)− x(t)
), x(0) = x0
y demostrar que si T1 y T2 son los valores extremos de la temperatura exterior, es decirT1 ≤ T (t) ≤ T2 para cada t ≥ 0, entonces T1 + (x0 − T1)e
−kt ≤ x(t) ≤ T2 + (x0 − T2)e−kt. Si
además se verifica que T1 ≤ x0 ≤ T2, concluir que T1 ≤ x(t) ≤ T2, para cada t ≥ 0.
En particular, si la temperatura exterior permanece constante e igual al valor T , com-probar que lım
t→+∞x(t) = T .
Problema 9.(S)Analizar las cuestiones planteadas en el problema anterior cuando ademásse tiene en cuenta la influencia que sobre la temperatura interior ejercen la presencia depersonas o el funcionamiento de las máquinas, es decir cuando la ecuación que determina lavariación de la temperatura interior está dada por
x′(t) = k(T (t)− x(t)
)+ H(t). k > 0.
¿Qué relación deben satisfacer T y H para que la temperatura interior sea constante?
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

32 Ecuaciones diferenciales ordinarias. Conceptos básicos
Problema 10.(S) Supongamos que en (1.11) el sistema de aire acondicionado está reguladopor un termostato lineal independiente del tiempo, es decir U(x) = α(x∗ − x) donde α > 0es una constante característica del termostato. Si consideramos f(t) = k T (t) + H(t) + αx∗,concluir que (1.11) es la siguiente ecuación lineal
x′(t) = −(k + α) x(t) + f(t).
Demostrar que si tanto T como H son funciones constantes, entonces es posible man-tener constante la temperatura interior y determinar el valor x de tal temperatura. Discutirtambién si para mantener la temperatura interior al valor x el aire acondicionado debe estarpermanente activo o siempre inactivo y hallar cuando ocurre cada una de las posibilidades.Cuando el aire acondicionado esté activo determinar si actúa enfriando o calentando el com-partimento.
Problema 11. (S)Hallar todas las soluciones de las EDO x′(t) = e−x(t) y x′(t) = e−|x(t)|.Comprobar que cada problema de valores iniciales tiene unicidad de soluciones.
Problema 12. (S)Hallar todas las soluciones de la EDO x′(t) = 1− x(t)2 y comprobar quecada problema de valores iniciales tiene unicidad de soluciones.
Problema 13.(S) Si α ≥ 1 hallar todas las soluciones de la EDO x′(t) = |x(t)|α y comprobarque cada problema de valores iniciales tiene unicidad de soluciones.
Problema 14. (S) Si α ≥ 1 y fα(x) =
{xα, si x ≥ 0,
x, si x ≤ 0,hallar todas las soluciones de las
EDO x′(t) = fα
(x(t)
), x′(t) = 2t fα
(x(t)
)y x′(t) = −2t fα
(x(t)
). Comprobar que, en los
tres casos, cada problema de valores iniciales tiene unicidad de soluciones.
Problema 15. (S) Si 0 < α < 1, hallar todas las soluciones de la EDO x′(t) = |x(t)|α.Comprobar que si x0 6= 0, para cada t0 ∈ R el problema de valores iniciales x′(t) = |x(t)|α,x(t0) = x0 tiene infinitas soluciones.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 33
Problema 16. Hallar todas las soluciones de la EDO x′(t) = 4t√|x(t)| y para cada x0 ∈ R
las del problema de valor inicial x′(t) = 4t√|x(t)|, x(0) = x0. Determinar qué problemas
tienen unicidad de soluciones.
Problema 17. Si 0 < α < 1 y f(x) =
{xα, si x ≥ 0,
x, si x ≤ 0,hallar todas las soluciones de las
EDO x′(t) = fα
(x(t)
), x′(t) = −2t f
(x(t)
)y x′(t) = 2t f
(x(t)
)y para cada t0, x0 ∈ R las
de los problemas de valor inicial x(t0) = x0. Determinar qué problemas tienen unicidad desoluciones. En particular, concluir que el problema de valores iniciales x(0) = 0 tiene soluciónúnica en el segundo caso e infinitas soluciones en el primero y tercero.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

34 Ecuaciones diferenciales ordinarias. Conceptos básicos
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
TEM
A2 MODELACIÓN CON EDODE PRIMER ORDEN
2.1. Problemas geométricos
En esta sección determinaremos las funciones que están caracterizadas por alguna pro-piedad que involucra o bien a la recta tangente en cada punto de la gráfica de la función,o bien al área de la región limitada por la gráfica de la función y el eje de abscisas, o bienla longitud de la gráfica entre los puntos t0 y t1, o bien el volumen de los sólidos generadospor revolución de la gráficas respecto del eje de abscisas o respecto del eje de ordenadas.Recordemos que si z : I −→ R es una función de clase C1(I), entonces para cada t ∈ I, larecta tangente a la gráfica de la función, {(s, z(s)
): s ∈ I}, en el punto (t, x(t) está dada
pory = z(t) + z′(t) (x− t), x ∈ R. (2.1)
Por otra parte, el área del recinto limitado por la gráfica de la función y eje de abscisas entrelos puntos t0 y t1 es
∫ t1
t0
f(s) ds, (2.2)
la longitud de la gráfica de la función entre los puntos t0 y t1 es
∫ t1
t0
√1 +
(f ′(s)
)2ds, (2.3)
mientras que el volumen de los sólidos generados por revolución, respecto del eje de abscisas ydel de ordenadas, del recinto limitado por el eje de abscisas y la gráfica comprendida entre
35

36 Ecuaciones diferenciales ordinarias. Modelación
los puntos t0 y t1, están dados respectivamente por
π
∫ t1
t0
f 2(s) ds y 2π
∫ t1
t0
s f(s) ds. (2.4)
2.1.1. Ejercicios
Problema 1.(S)Determinar las funciones tales que la pendiente de cada punto de su gráficaes igual a la suma de las coordenadas de dicho punto.
Problema 2. (S)Determinar todas las funciones x tales que para cada t la recta tangenteen t corta al eje de abscisas en el punto t− 1.
Problema 3.(S)Determinar las funciones tales que en todo punto de su gráfica la pendientede su tangente es doble que la de la recta que une dicho punto con el origen de coordenadas.
Problema 4. Determinar las funciones tales que en todo punto de su gráfica el segmentoformado con el punto de corte de la tangente con el eje de ordenadas es cortado por el ejede abscisas en su punto medio.
Problema 5.(S)Determinar las funciones tales que en todo punto de su gráfica la tangentey la recta que pasa por dicho punto y el origen de coordenadas forman con el eje de abscisasun triángulo isósceles.
Problema 6. Determinar las funciones tales que en todo punto de su gráfica el triánguloformado por la tangente, el eje de abscisas y la perpendicular al eje de abscisas desde elpunto de tangencia tiene área constantemente igual a A > 0.
Problema 7. Determinar las funciones tales que fijado t0, para cualquier t el área del recintolimitado por la gráfica y el eje de abscisas entre t0 y t es proporcional a la diferencia entrelas ordenadas de dichos puntos con constante de proporcionalidad igual a k > 0.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Problemas de Mezclas 37
Problema 8. Determinar las funciones tales que fijado t0, para cualquier t el cociente entreel área del recinto limitado por la gráfica y el eje de abscisas entre t0 y t y la longitud de lagráfica entre t0 y t es constantemente igual a k > 0.
Problema 9.(S)Determinar las funciones cuya gráfica pasa por el origen de coordenadas ytales que para cualquier t el volumen del sólido generado por revolución, respecto del eje deabscisas, de la gráfica comprendida entre los puntos t0 y t1 coincide con el volumen del sólidogenerado por revolución, respecto del eje de ordenadas, del recinto limitado por el propio ejede ordenadas y la gráfica comprendida entre los puntos t0 y t1.
2.2. Problemas de Mezclas
En una disolución cuyo contenido se renueva y donde se supone que en cada instante ladistribución del soluto en la mezcla es uniforme, la concentración de la mezcla está controladapor los flujos de entrada y salida. Si en cada instante t, x(t) denota la cantidad de solutopresente la disolución, su variación, x′(t), está determinada por la diferencia entre la cantidadde soluto que entra en el recipiente, xe(t), y la que sale del mismo, xs(t), es decir
x′(t) = xe(t)− xs(t). (2.5)
En cada instante t son conocidos el volumen de la disolución, V (t), la concentración delsoluto en la disolución entrante, ce(t), la cantidad de disolución que entra en el recipiente, fe(t),y también la cantidad de disolución que sale del recipiente, fs(t).
La cantidad de soluto entrante en el recipiente es el producto de su concentración enla disolución entrante con la cantidad de disolución de entrada, es decir xe(t) = ce(t)fe(t).Análogamente, la cantidad de soluto que sale del recipiente se obtiene multiplicando laconcentración de soluto en la disolución por la cantidad de disolución que sale del recipiente.Como la concentración de soluto es la cantidad del mismo por unidad de volumen, es decirx(t)
V (t), resulta que la cantidad de soluto que sale de la disolución está dada por la expresión
vs(t) =x(t)
V (t)fs(t). En definitiva, la cantidad de soluto en la disolución está determinada por
la ecuación diferencial
x′(t) = ce(t)fe(t)− fs(t)
V (t)x(t). (2.6)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

38 Ecuaciones diferenciales ordinarias. Modelación
Obsérvese que los datos fe, fs y V no son independientes entre sí ya que la variación devolumen es justamente la diferencia entre las cantidades de entrada y salida de la disolución,es decir V ′(t) = fe(t)− fs(t).
2.2.1. Ejercicios
Problema 1. Si consideramos las funciones a, f : R −→ R y F : R × R −→ R dadas por
a = −fs
V, f = cefe y F (t, x) = a(t)x + f(t), demostrar que la EDO (2.6) se expresa como
x′(t) = F (t, x(t)) y es por tanto una ecuación lineal de primer orden.
Determinar la condición necesaria y suficiente para que la ecuación sea autónoma einterpretarla en términos de los datos del problema, es decir de V , fs, fe y ce.
Demostrar que el sistema tiene a lo sumo un equilibrio y hallarlo explícitamente cuandoexista.
Problema 2. Si en un instante dado t0 se conoce el volumen de la disolución, demostrarque el volumen en cada instante t ≥ t0 está determinado por la expresión
V (t) = V (t0) +
∫ t
t0
[fe(z)− fs(z)
]dz.
Concluir que el volumen de la disolución es constante sii la cantidades de entrada y salidade la disolución coinciden en cada instante.
Problema 3. En un tanque que contiene 1000` de agua, comienza a introducirse una solu-ción de salmuera a una velocidad constante de 6`/min. Dentro del tanque la solución semantiene bien agitada y fluye hacia el exterior del mismo a una velocidad de 6`/min.
(i) Si la concentración de sal en la salmuera que entra en el tanque es de 1kg/`, determinarcuando la concentración de sal en el tanque será de 0, 5kg/`.
(ii) Determinar la concentración de sal en el tanque si ahora suponemos que la salmuerasale de él a una velocidad constante de 5`/min.
Problema 4. Una alberca cuyo volumen es de 45m3 contiene agua con cloro en una pro-porción de 0, 01 %. Se bombea dentro de la alberca, agua que contiene el 0, 001 % de cloro arazón de 22`/min y el agua de la alberca fluye hacia el exterior a la misma velocidad. ¿Cuáles el porcentaje de cloro en la alberca al cabo de una hora? ¿Cuándo tendrá el agua de laalberca un 0, 002 % de cloro?
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Desintegración radiactiva 39
Problema 5. La corriente sanguínea lleva un medicamento hacia el interior de un órgano arazón de 3cm3/seg y sale de él a la misma velocidad. El órgano en cuestión tiene un volumende líquido de 125cm3. Si la concentración del medicamento en la sangre que entra en elórgano es de 0, 2g/cm3, ¿cuál es la concentración del medicamento en el órgano en el instantet si inicialmente no había vestigio alguno del medicamento? ¿Cuándo la concentración delmedicamento en el órgano será del 0, 1g/cm3?
Problema 6. La proliferación de granjas dedicadas a la explotación porcina generó unacontaminación por purinas en la cuenca del río Ter, cuya concentración, medida en lasaguas del pantano de Sau, alcanzó niveles alarmantes. Esta situación generó una actividadlegislativa que produjo normativas reguladoras del tamaño de las explotaciones y establecióla obligatoriedad del tratamiento de las purinas. Como consecuencia de la aplicación de lasdisposiciones establecidas, las aguas que entran en el pantano dejaron de estar contaminadasa partir de cierto momento, que denotaremos por t0.
Supondremos para simplificar que tanto el volumen de agua en el pantano como su flujode entrada son constantes y mediremos el volumen en metros cúbicos y la concentración depurinas en gramos por metro cúbico.
Encontrar la ecuación diferencial que satisface la concentración de purinas a partir delinstante t0. Determinar el tiempo que ha de transcurrir para que el nivel de contaminaciónse reduzca un 5 %. ¿Cuánto tiempo ha de pasar para que se reduzca a la mitad? ¿Quedarálimpio el pantano en un tiempo finito?
2.3. Desintegración radiactiva
La ley que gobierna la desintegración radiactiva establece que el número de átomos deuna sustancia radiactiva que se desintegra por unidad de tiempo, la tasa de desintegración,depende exclusivamente del número de átomos existentes en ese momento, y que ademásla cantidad de átomos decrece con el tiempo. Por tanto, si x(t) es la masa de la sustancia,que es directamente proporcional al número de átomos y T (x) es la tasa de desintegración,entonces la variación de la masa debe satisfacer la ecuación diferencial
x′(t) = −T (x(t)). (2.7)
Es razonable suponer que la tasa de desintegración es una función continua T : R −→ Rque además satisface que T (0) = 0 y que T (x) > 0, si x 6= 0. Observar que el modelo sólotiene sentido cuando x(t) ≥ 0, aunque desde el punto de vista matemático la ecuación (2.7)es válida para cualquier valor de x(t). Diremos que la sustancia se desintegra en tiempo finito
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

40 Ecuaciones diferenciales ordinarias. Modelación
si existe t0 > 0 tal que x(t0) = 0, mientras que diremos que la sustancia se desintegra entiempo infinito si lım
t→∞x(t) = 0.
Es claro que los diferentes modelos de desintegración estarán determinados por la co-rrespondiente tasa de desintegración. El más usual es el denominado lineal, en el que latasa de desintegración es proporcional al número de átomos existentes, es decir T (x) = k x,donde k > 0. La constante k recibe el nombre de constante de desintegración radiactiva yes un parámetro propio de cada sustancia. Así pues en el modelo de desintegración lineal, laecuación diferencial que determina la variación de la masa de una sustancia radiactiva estádada por
x′(t) = −k x(t), k > 0. (2.8)
Un parámetro importante asociado a cada elemento radiactivo lineal es su semivida, τ ,que es el tiempo necesario para que la masa de la sustancia se reduzca a la mitad. La relaciónentre la semivida y la constante de desintegración k está dada por la identidad
kτ = ln 2, (2.9)
permite calcular uno de los dos parámetros conocido el otro. Normalmente, la semivida deuna sustancia se determina en un laboratorio mediante medidas experimentales.
En muchas ocasiones el modelo lineal no es capaz de describir adecuadamente el procesode descomposición de una sustancia, por lo que debe recurrirse a modelos asociados a tasas dedesintegración diferentes de la lineal y que se denominan genéricamente modelos no lineales.El tipo más utilizado es el que corresponde a tasas de crecimiento de la forma
Tα(x) = k |x|α, donde k, α > 0. (2.10)
Observar que cuando α = 1 el modelo corresponde básicamente al caso lineal.
2.3.1. Datación
El hecho de que la constante de desintegración de una sustancia radiactiva no varíe a lolargo del tiempo, permite elaborar métodos para determinar fechas de sucesos que ocurrieronhace miles o incluso millones de años. Así, si para una sustancia radiactiva que se desintegrasegún el modelo lineal (2.8) se sabe que en los instantes t1 y t2 la masa de la sustancia, o elnúmero de átomos de la misma, es x1 > 0 y x2 > 0, respectivamente, o bien son conocidaslas tasas de desintegración de la sustancia, por ejemplo T1 y T2, respectivamente, entoncesla semivida está determinada por la expresión
τ =(t2 − t1) ln 2
ln x1 − ln x2
=(t2 − t1) ln 2
ln T1 − ln T2
. (2.11)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Desintegración radiactiva 41
Observar que la importancia de las igualdades anteriores se encuentra en el hecho queconociendo τ , x1 y x2, o bien T1 y T2, podemos determinar t2 − t1, es decir conociendo lasemivida de una substancia y la cantidad presente en dos momentos concretos, o las tasas dedesinteración en dos momentos concretos, entonces se puede determinar el lapso de tiempotranscurrido entre ambos. A este proceso se le denomina datación.
Alrededor de 1950, el químico estadounidense Willard F. Libby (1908-1980) inventó unmétodo que emplea el carbono radiactivo para determinar las edades aproximadas de losfósiles y que le valió el Premio Nobel de Química en 1960. La teoría de la datación conradiocarbono se basa en que el isótopo Carbono 14, cuya semivida es de aproximadamente5570 años, se produce en la atmósfera por acción de la radiación cósmica sobre el nitrógeno.Dicho isótopo es muy inestable y se desintegra rápidamente, incorporándose al dióxido decarbono, con lo que se desplaza por la atmósfera para ser absorbido por los vegetales, de dondepasan a los animales cuando éstos los ingieren. En los tejidos vivientes, la tasa de ingestiónde C14 está en equilibrio con la tasa de desintegración. Cuando el organismo muere, cesa laincorporación de C14, de manera que la concentración del mismo empieza a decrecer.
La suposición fundamental de este método es que la tasa de bombardeo de la atmósferapor rayos cósmicos es constante en el tiempo, lo que implica que la tasa actual de desinte-gración de C14 en los organismos vivos es idéntica a la que se produjo en cualquier instanteanterior. Así por ejemplo, si un fragmento antiguo de madera tiene la mitad de C14 que unárbol vivo, procede un árbol talado hace 5570 años, mientras que si tiene la cuarta parte deC14 el árbol del que fue extraída vivió hace 11140 años. Este método de datación fue usado,por ejemplo, para fechar los muebles de madera en las tumbas egipcias y las envolturas delino en los rollos del Mar Muerto. Pese a algunas dificultades técnicas,1 el método se con-sidera actualmente capaz de dar una precisión razonable en períodos de tiempo superiores a200 años e inferiores a los 40 millones años.
2.3.2. Desintegración en cadena
Es habitual que un elemento radiactivo origine al desintegrarse una nueva sustanciaradiactiva y que está a su vez se desintegre en otra, formando lo que se denomina unadesintegración en cadena, que concluye cuando se llega a una sustancia estable no radiactiva.Por tanto, para conocer la cantidad de una sustancia radiactiva presente en una muestra,ha de tenerse en cuenta no sólo la cantidad que se desintegra sino también la que aportacualquiera de los elementos que aparecen por encima de él en la cadena radiactiva. Así pues,si una sustancia S1 origina al desintegrarse una sustancia S2 que se desintegra a su vez ydenominamos x1(t) y x2(t) a las cantidades de sustancias S1 y S2, respectivamente, entonces
1Por ejemplo, la hipótesis fundamental debe ser refinada, debido a que los numeros ensayos con armasnucleares realizados a partir de los años 50, han incrementado notablemente la cantidad de C14 en la atmós-fera.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

42 Ecuaciones diferenciales ordinarias. Modelación
la variación de ambas sustancias esta determinada por las identidades
x′1(t) = −T1(x1(t)) y x′2(t) = −T2(x2(t)) + T1(x1(t)). (2.12)
Más generalmente, si tenemos una cadena de n sustancias radiactivas S1, . . . , Sn de man-era que para cada j = 1, . . . , n−1, Sj se desintegra en Sj+1 y cuyas tasas de desintegración es-tán descritas respectivamente por las funciones T1, . . . , Tn, entonces si para cada j = 1, . . . , n,xj(t) es la cantidad de sustancia Sj, su variación está determinada por la identidad
x′1(t) = −T1(x1(t)) y x′j(t) = −Tj(x2(t)) + Tj−1(xj−1(t)), j = 2, . . . , n, (2.13)
que describe por tanto un sistema de n ecuaciones diferenciales ordinarias de primer orden.En particular, si para cada j = 1, . . . , n la sustancia Sj se desintegra según el modelo linealcon constante de desintegración kj, entonces la variación de cada sustancia está determinadapor el sistema lineal de primer orden
x′1(t) = −k1x1(t)
x′2(t) = −k2x2(t) + k1x1(t)...
x′n(t) = −knxn(t) + kn−1xn−1(t).
(2.14)
En [?, pg. 14] puede encontrarse la cadena del Uranio 238 que tiene 14 eslabones y queconcluye en el Plomo 206 que es una sustancia no radiactiva.
2.3.3. Ejercicios
Problema 1. Demostrar que la ecuación (2.7) posee un único estado de equilibrio, concre-tamente x∗ = 0. Demostrar también que cualquier solución de la EDO (2.7) es decreciente.Concluir que si una sustancia no se desintegra en tiempo finito, entonces la función, x, quedetermina su masa es estrictamente decreciente y por tanto existe lım
t→∞x(t) ≥ 0. ¿Qué valor
tiene este límite?
Problema 2. Justificar en el modelo de desintegración lineal la relación (2.9) entre la con-stante de desintegración y la semivida y las fórmulas (2.11) para la semivida.
Problema 3. Una sustancia radiactiva que se desintegra según el modelo lineal, por ejemploel Torio 234, tiene una semivida de 24 días. ¿Cuánto tardará en desintegrarse el 95 % dedicha sustancia ?
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Desintegración radiactiva 43
Problema 4. Calcular la semivida de una sustancia radiactiva que se desintegra según elmodelo lineal y que en 25 años ha descompuesto el 1, 1 % de su masa inicial.
Problema 5. La fisión nuclear produce neutrones en una pila atómica a un ritmo propor-cional al número de neutrones presentes en cada instante. Si inicialmente existen n0 neutronesy en los instantes t1 y t2 existen n1 y n2 neutrones respectivamente, demuéstrese la identidad
(n1
n0
)t2
=
(n2
n0
)t1
.
Problema 6. El C14 se desintegra en la madera viva a un ritmo de 15, 3 desintegracionespor minuto (dpm) y gramo de carbono. Hacer una estimación sobre la edad de cada unode los objetos cuyos resultados en el análisis radiactivo, efectuado en el año 2005, son lossiguientes:
i) Un fragmento de una talla de madera en la tumba de Tutankhamon, 10, 09 dpm.
ii) Un trozo de viga de la techumbre de una casa de Babilonia construída durante elreinado de Hammurabi, 9, 57 dpm.
iii) Una flecha de madera encontrada en el yacimiento de Atapuerca, 6, 34 dpm.
Problema 7. Con motivo de unas obras de mejora de los accesos a la parte externa de lamuralla de Girona, realizadas a mediados del año 2005, se ha descubierto una fosa común conhuesos de aproximadamente 500 esqueletos humanos. Los cadáveres se encontraron sin ropasque permitieran identificar su procedencia, pues aparecieron cubiertos por algún tipo de toscosudario, prácticamente desecho por la acción del tiempo. La disposición de los cadáveres yel haberse encontrado relativamente cerca del yacimiento algunos restos de lo que pareceun campamento que albergó una milicia, hace pensar en un enterramiento apresurado desoldados, víctimas de algún tipo de epidemia.
Un análisis del C14 de los huesos encontrados determina una tasa de desintegración de6, 108 dpm. Sabiendo que la tasa de desintegración del C14 en los huesos de un organismo vivoes de 6, 68 dpm, ¿que grado de verosimilitud tiene afirmar que los soldados eran franceses?
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

44 Ecuaciones diferenciales ordinarias. Modelación
Problema 8. (Modelos no lineales de desintegración). Sea x(t) la masa de una sustanciaradiactiva que se desintegra según la ley
x′(t) = −k |x(t)|α, donde k, α > 0 (2.15)
y suponer que en el instante t = 0 la masa de la sustancia es x0 > 0.
(i) Si α > 1, demostrar que podemos determinar unívocamente la masa de la sustanciapara cada t ∈ [0, +∞). Concluir que en este caso la sustancia se desintegra en tiempo infinito.
(ii) Si 0 < α < 1, demostrar que la sustancia se desintegra en tiempo finito t0 > 0 y de-terminar t0. Comprobar también que la masa de la sustancia está unívocamente determinadaen el intervalo [0, t0].
(iii) Si τα es el tiempo necesario para que la masa de sustancia se reduzca a la mitad, esdecir a
x0
2, demostrar que
kτα =(x0
2
)1−α[2α−1 − 1
α− 1
].
Calcular también lımα→1
kτα e interpretar el resultado obtenido.
(iv) Supóngase que se conoce además que en los instantes t1 y t2 la masa de la sustancia,o el número de átomos de la misma, es x1 > 0 y x2 > 0, respectivamente. Demostrar que
τα =(x0
2
)1−α (t2 − t1) (1− 2α−1)
x1−α1 − x1−α
2
,
calcular el límite de la expresión anterior e interpretar el resultado obtenido.
Problema 9. Considérese el sistema lineal
x′1(t) = −k1x1(t)
x′2(t) = −k2x2(t) + k1x1(t)...
x′n(t) = −knxn(t) + kn−1xn−1(t)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Reacciones Químicas 45
determinado por la descomposición en cadena, según el modelo lineal, de n sustancias radiac-tivas. Hallar la masa de cada una de las sustancias en cada instante de tiempo sabiendo quela correspondiente en el instante inicial es xj(0) = xj > 0, j = 1, . . . , n. ¿Qué interpretaciónpuede darse a las condiciones xj(0) = 0, j = 2, . . . , n?
2.4. Reacciones Químicas
Una reacción química es un proceso en el que una o más sustancias denominadas reactivosse combinan o separan para formar otras sustancias denominadas productos. En las reaccionesque consideraremos aquí supondremos que la masa se conserva y que se absorbe o disipaenergía. La reacción se denomina irreversible si el producto no se separa en sus constituyentesuna vez formado. Este tipo de procesos serán los que trataremos a continuación. Para unanálisis de las reacciones reversibles puede consultarse por ejemplo [?].
Una reacción química en la que m ≥ 2 reactivos R1, . . . , Rm se combinan para dar lugar aun producto P , de manera que para formar γ moléculas de P son precisas αj ≥ 0 moléculasde la sustancia Rj, j = 1, . . . , m, se denomina reacción de orden m y suele representarsemediante la notación2
α1R1 + · · ·+ αmRm −→ γP, (2.16)
donde la conservación de la masa implica quem∑
j=1
αj = γ.
El tipo más elemental de reacción química es la reacción de primer orden en la cual lasmoléculas de un reactivo se transforman en moléculas de un producto a un ritmo que no esafectado por la presencia de otras sustancias. Por tanto, es natural esperar que el númerode moléculas que se descomponen por unidad de tiempo sea proporcional a la cantidad dereactivo presente.
Cuando el producto se forma a partir de una reacción de orden m, es decir a partir de mreactivos, el proceso se produce por colisión e interacción entre las sustancias, lo que implicaque que cuanto mayor sea la cantidad de cada una de ellas mayor será el número de colisionesy por tanto habrá mayor número de combinaciones por unidad de tiempo. La rapidez conla que se transforman los reactivos en productos está descrita por la denominada Ley deMasas que establece que dicha velocidad es proporcional al producto de las cantidades delos reactivos presentes, ya que este producto es un indicador de la posibilidad de encuentros
2La unidad habitual en química es el mol. Cada mol equivale N moléculas o átomos de sustancia, dondeN = 6, 024 × 1024 es el número de Avogrado. Si se utilizan moles en lugar de moléculas como unidad demedida, la reacción de orden m puede expresarse diciendo que αj moles de la sustancia Rj , j = 1, . . . , m,reaccionan para formar γ moles de P .
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

46 Ecuaciones diferenciales ordinarias. Modelación
entre las moléculas. En particular, la Ley de Masas establece que la reacción antes descritapuede formularse de manera equivalente como
α1
γR1 + · · ·+ αm
γRm −→ P, (2.17)
donde en este casoαj
γrepresenta la proporción, concentración, de sustancia Rj en el producto
final.
En el caso de una reacción de primer orden se tiene que R −→ P , de manera que si paracada t, y(t) denota la cantidad de reactivo en el instante t, el proceso queda descrito por laecuación diferencial
y′(t) = −k y(t), k > 0. (2.18)
Observar que como en este caso todo el reactivo se transforma en producto, si R es laconcentración inicial de reactivo, entonces x(t) = R − y(t) es la cantidad de productoen el instante t. Esto significa que si en lugar de tomar como incógnita la cantidad dereactivo, consideramos la cantidad de producto en cada instante, entonces se satisface que
x′(t) = k(R− x(t)
), (2.19)
donde k es la misma constante que en (2.18).
En el caso de reacciones de orden m, la Ley de Masas establece que si para cada tdenotamos por x(t) a la cantidad de producto P en el instante t, entonces
x′(t) = k
m∏j=1
Cj(t), donde k > 0. (2.20)
donde para cada j = 1 . . . , m, Cj(t) es la cantidad del reactivo j-ésimo que queda en elinstante t. Si para cada j = 1, . . . , m, Rj denota la cantidad inicial de reactivo j-ésimo,resulta que Cj(t) = Rj − αj
γx(t). Por tanto, resulta que x satisface la ecuación diferencial
x′(t) = k
m∏j=1
(Rj − αj
γx(t)
), donde k > 0, (2.21)
o, de manera equivalente,
x′(t) = k
m∏j=1
(x∗j − x(t)
), donde k =
k
γm
m∏j=1
αj y x∗j = γRj
αj
, j = 1, . . . ,m, (2.22)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Reacciones Químicas 47
que cuando m = 1 se reduce a (2.19), ya que en este caso α1 = γ.
En la identidad (2.22), el valor x∗j representa para cada j = 1, . . . , m, la cantidad decompuesto necesaria para agotar todo el reactivo j-ésimo. No existe pérdida de generalidadsi en lo sucesivo suponemos que x∗1 ≤ x∗2 ≤ · · · ≤ x∗m, lo que no excluye que x∗j = x∗j+1 paraalgún j = 1, . . . , m. Por tanto si x0 es la cantidad inicial de producto, la hipótesis de que Pestá compuesto solamente de los reactivos implica que 0 ≤ x0 ≤ x∗m, aunque desde el puntode vista matemático x0 podría tomar cualquier valor.
Por otra parte, si x0 ≥ x∗i para algún i = 1, . . . ,m, como 1 =1
γ
m∑j=1
αj ≥ 1
γ
i∑j=1
αj, resulta
que
x0 ≥(
1
γ
i∑j=1
αj
)x0 ≥ 1
γ
i∑j=1
αjx0 ≥ 1
γ
i∑j=1
αjx∗j ≥
i∑j=1
Rj,
es decir el producto P contiene total la cantidad posible de los primeros i reactivos.
En definitiva, en lo sucesivo consideraremos fijada la siguiente ecuación diferencial quedetermina la velocidad de una reacción irreversible de orden m ≥ 1
x′(t) = k
m∏j=1
(x∗j − x(t)
), donde k > 0 y 0 < x∗1 ≤ · · · ≤ x∗m. (2.23)
2.4.1. Ejercicios
Problema 1. Demostrar que la ecuación (2.23) posee m estados de equilibrio, concreta-mente x∗1, . . . , x
∗m. Concluir también que cada problema de valores iniciales tiene unicidad de
soluciones.
Problema 2. Consideremos x : J −→ R la única solución del problema de valores iniciales
x′(t) = km∏
j=1
(x∗j − x(t)
), x(0) = x0, donde k > 0 y 0 < x∗1 ≤ · · · ≤ x∗m.
Demostrar que si x0 < x∗1, entonces x es estrictamente creciente y x0 < x(t) < x∗1 paracada t ∈ J . Concluir que [0, +∞) ⊂ J y que además lım
t→+∞x(t) = x∗1.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

48 Ecuaciones diferenciales ordinarias. Modelación
Demostrar que si x∗j < x0 < x∗j+1, entonces x es estrictamente creciente o decrecientedependiendo de si m−j es par o impar y además x∗j < x(t) < x∗j+1 para cada t ∈ J . Concluirque lım
t→+∞x(t) = x∗j+1 si m− j es par mientras que lım
t→+∞x(t) = x∗j si m− j es impar.
Demostrar que si x0 > x∗m, entonces x es estrictamente creciente o decreciente dependi-endo de si m es par o impar y además x∗m < x(t) para cada t ∈ J . Concluir que si m esimpar, entonces [0, +∞) ⊂ J y además lım
t→+∞x(t) = x∗m.
Problema 3. Si x es la solución del problema (2.23) y por tanto determina la cantidadde producto, entonces para cada i = 1, . . . , m, la función Ci(t) = Ri − αi
γx(t) describe la
cantidad del reactivo i-ésimo. Despejar x(t) en la anterior igualdad y utilizar la ecuación(2.20) para determinar la siguiente ley dinámica para Ci:
C ′i(t) = −k Ci(t)
m∏j=1j 6=i
(x∗j − x∗i +
γ
αi
Ci(t)), donde k =
k
γm
m∏j=1
αj.
Problema 4. Resolver los problemas de valor inicial correspondientes a las reacciones quími-cas irreversibles de segundo orden, es decir, resolver el problema de valores iniciales
x′(t) = k(x∗1 − x(t)
)(x∗2 − x(t)
), x(0) = x0, donde 0 < x∗1 ≤ x∗2.
Concluir que si x∗1 < x∗2 sólo el primer reactivo se agota en la reacción, mientras que six∗1 = x∗2 los dos reactivos se consumen completamente.
Una vez conocida la función x, para cada instante t determinar la cantidad de cadareactivo en cada instante. Hallar directamente cada uno de estos valores a partir de suecuación dinámica.
2.5. Caída de Cuerpos
Supongamos que un cuerpo de masa m > 0 cae verticalmente hacia la Tierra. Si paracada t, v(t) denota la velocidad del cuerpo, las Leyes del Movimiento de Newton establecenque el producto de la masa por la aceleración es igual a la fuerza externa F ejercida sobre
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Caída de Cuerpos 49
el cuerpo. Esta fuerza incluye el efecto de la gravedad sobre el cuerpo, peso del cuerpo, yel de la resistencia ofrecida por el aire. Si suponemos que la altura a la que cae el cuerpoes pequeña en comparación con el radio de la Tierra, entonces el efecto de la gravedad estádado por mg, donde g es la aceleración debida a la gravedad. Por otra parte, es razonablesuponer que el amortiguamiento R depende exclusivamente de la velocidad y está descritopor una función continua R : R −→ [0, +∞) tal que R(0) = 0 y creciente en el intervalo[0, +∞), de manera que la ecuación que determina la velocidad de caída de un cuerpo estádada por
mv′(t) = mg −R(v(t)). (2.24)
Naturalmente sólo serán de interés físico las soluciones no negativas de la anterior EDO.
El amortiguamiento R se denomina viscoso cuando es una función lineal y newtonianocuando es cuadrática. En el primer caso R(v) = kv y en el segundo R(v) = kv2, dondek ≥ 0 se denomina coeficiente de amortiguamiento. En particular, si el coeficiente de amor-tiguamiento es nulo, entonces no existe rozamiento y el movimiento se denomina de caídalibre.
2.5.1. Ejercicios
Problema 1. Demostrar que las soluciones de equilibrio no negativas de la ecuación (2.24)corresponden a velocidades de caída constantes y por tanto a movimientos uniformes.
Problema 2. Supongamos que en la ecuación (2.24), el amortiguamiento R es estrictamentecreciente en [0, +∞) y satisface que lım
v→+∞R(v) = +∞. Demostrar que existe un único
movimiento uniforme posible, cuyo valor se denotará por v∗. Determinar la expresión de v∗,tanto para el caso viscoso como para el newtoniano.
Problema 3. Determinar el tiempo que tarda en llegar al suelo un objeto en caída libre,situado a una altura h0 > 0 y que tiene una velocidad inicial igual a v0 ≥ 0.
Problema 4. Un paracaidista de masa m se lanza de un avión y abre el paracaídas a unaaltura h0 del suelo cuando ha adquirido en caída libre una velocidad v0. Si al lanzarse, elparacaidista tenía velocidad nula, ¿a qué altura estaba el avión en el momento del lanza-miento?
Determinar la expresión de la velocidad adquirida por el paracaidista si se supone que elamortiguamiento es viscoso, y también si se supone que el amortiguamiento es newtoniano.En este caso la constante de amortiguamiento depende de la forma y tamaño del paracaídas.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

50 Ecuaciones diferenciales ordinarias. Modelación
Demostrar que en ambos casos lımt→+∞
v(t) = v∗, donde v∗ es la velocidad de equilibrio, ydeterminar también la expresión del espacio recorrido por el paracaidista.
Problema 5. Supongamos que en la ecuación (2.24) que determina la velocidad de caídade un cuerpo, el amortiguamiento satisface que R ∈ C1(R).
i) Demostrar que cada problema de valores iniciales tiene una única solución.
ii) Si además R′(v) > 0 para v ≥ 0 y R no es acotada, demostrar que existe un únicomovimiento uniforme posible, cuya velocidad es v∗ > 0. Demostrar que si 0 ≤ v0
la solución del problema de valores iniciales mv′(t) = mg − R(v(t)), v(0) = v0 esestrictamente creciente si 0 ≤ v0 < v∗ y estrictamente decreciente si v0 > v∗. Concluirque la solución del anterior problema de valores iniciales está definida en [0, +∞) yque además lım
v→+∞v(t) = v∗.
2.6. Propagación de rumores
Suponemos que en una pequeña comunidad en la que todos los individuos se conocen,una noticia se transmite de boca a oreja. Se supone además que la noticia no se olvida y queel número de personas que se enteran de ella por primera vez en un instante dado dependeprimero de la posibilidad de encuentro entre los individuos que la conocen y los que no laconocen y también de la intención de transmitir el rumor por parte del individuo informadoasí como del interés por oírlo por parte del no informado.
Si T es el tamaño de la población y denotamos por x(t) a la cantidad de individuosinformados en el instante t, la probabilidad de encontrar un individuo informado y la de
encontrar uno desinformado sonx(t)
Ty
T − x(t)
T, respectivamente y por tanto la probabilidad
de encuentro de tal tipo de individuos está dada por1
T 2x(t)
(T − x(t)
). Agruparemos la
constante T−2 en un parámetro que recoja también el resto de consideraciones planteadaspara la difusión del rumor. Así pues la ecuación que determina el número de individuosinformados está dada por
x′(t) = k x(t)(T − x(t)
), k > 0. (2.25)
En este caso si planteamos resolver un problema de valores iniciales con x(0) = x0, aunquematemáticamente tiene sentido tomar cualquier valor de x0, para que el problema no pierdasignificado debe satisfacerse que 0 ≤ x0 ≤ T .
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Modelos de Poblaciones 51
La ecuación diferencial (2.25) recibe el nombre de Ecuación Logística y como veremos ellao cualquiera de sus múltiples variantes aparecen en muchos procesos que tratan poblaciones.
2.6.1. Ejercicios
Problema 1. Determinar las soluciones de equilibrio de la ecuación (2.25) y hallar sussoluciones. Comprobar que si 0 < x0 < T , entonces 0 < x(t) < T para cada t ∈ R y justificarque con el tiempo suficiente, cualquier rumor se difunde entre toda la población.
Problema 2. Justificar que un rumor se propaga cada vez más deprisa hasta que ha si-do informada la mitad de la población y a partir de ese momento se propaga con menorvelocidad.
Problema 3. El 2 % de los alumnos de la asignatura Ampliación de Matemáticas difundena las 12h de un lunes el rumor de que el martes a las 11h tendrá lugar un examen sorpresade ecuaciones diferenciales ordinarias. Sabiendo que el lunes a las 14h la noticia es conocidapor el 5 % de los alumnos, ¿cuál es el porcentaje de alumnos que a la hora de comienzo dela clase del martes conocen la noticia?
2.7. Modelos de Poblaciones
Se supone que una población está aislada, es decir no son relevantes fenómenos de em-igración o inmigración. Si x denota la cantidad de individuos en la unidad de tiempo, quegeneralmente se toma como un año, se define la Tasa de Crecimiento T como la diferenciaentre las Tasa de Natalidad Tn y la Tasa de Mortalidad Tm, que por supuesto, dependen delnúmero de individuos de la población. Así pues, xTn y xTm representan el número total denacimientos y muertes en la unidad de tiempo y la tasa de crecimiento es la variación neta dela población por unidad de tiempo, dividida por la población total al comienzo del periodo.Si el tamaño de la población es suficientemente grande, es razonable suponer que la canti-dad de individuos varía de forma continua e incluso diferenciable con el tiempo. Entonces,la tasa de crecimiento dependerá continuamente de la población y la tasa de crecimiento
instantánea estará determinada por la relación T (x(t)) =x′(t)x(t)
. En definitiva, el tamaño de
una población está regido por la ecuación diferencial
x′(t) = T (x(t)) x(t). (2.26)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
52 Ecuaciones diferenciales ordinarias. Modelación
Es claro que los diferentes modelos de crecimiento estarán determinados por la elecciónde la tasa de crecimiento instantánea.
En este tipo de modelos no está contemplada la condición, contrastada por la experiencia,de que para una población pueda sobrevivir es necesario que su tamaño supere un valor, quedenominaremos umbral de subsistencia y que denotaremos por x∗. La incorporación de esteumbral al modelo anterior conduce a la ecuación diferencial
x′(t) = T(x(t)
)(x(t)− x∗), x∗ ≥ 0. (2.27)
En particular, si la población umbral se toma como cero recuperamos el modelo inicial(2.26). Observar que si la tasa de crecimiento es no negativa, entonces él tamaño de lapoblación disminuye para valores inferiores a la población umbral.
El modelo más simple de evolución de una población es el determinado por la denominadaLey de Malthus, que supone que la tasa de crecimiento es constante, positiva o negativa, esdecir no depende del tamaño de la población y por tanto da lugar a la ecuación diferencial
x′(t) = k (x(t)− x∗), k ∈ R, x∗ ≥ 0. (2.28)
En un modelo más elaborado, es razonable tener en cuenta que en tamaños suficiente-mente grandes de poblaciones aparecen problemas de conflictividad social tales como su-perpoblación, escasez alimentos y por tanto competencia por los mismos, etc, que debenconducir por tanto a una modificación de la Ley de Malthus.
Diremos que f : R −→ [0, +∞) es una función de conflictividad social si es continua,estrictamente creciente en [0, +∞) y satisface además que f(0) = 0 y lım
x→+∞f(x) = +∞.
Observar que las propiedades de esta función responden al hecho en ausencia de poblaciónno existe conflictividad, y también a que la conflictividad aumenta con el tamaño de lapoblación.
En la corrección del modelo malthusiano conocido como Ley de Verhults, la tasa decrecimiento de la población tiene en cuenta los fenómenos de conflictividad social y estádeterminada por la expresión T (x) = k−f(x), donde k > 0 y f es una función de conflitividadque satisface que f(x∗) < k, lo que significa que la conflictividad es moderada en el entornode la población umbral. Así pues el tamaño de una población que evoluciona según la Leyde Verhults es solución de la ecuación diferencial
x′(t) =(k − f
(x(t)
))(x(t)− x∗
), k > 0, x∗ ≥ 0, con f(x∗) < k, (2.29)
donde f es una función de conflictividad. Observar que desde este punto de vista el modelomalthusiano correspondería a considerar constante la conflictividad social, aunque natural-mente la función nula no satisface los requerimientos impuestos a una función de conflictivi-dad.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Modelos de Poblaciones 53
Uno de los modelos más utilizados corresponde al caso en el se supone que la conflictividades directamente proporcional al tamaño de la población, es decir f(x) = εx, donde ε > 0recibe el nombre de coeficiente de conflictividad, que debe satisfacer que εx∗ < k. En estecaso particular el modelo de Verhults recibe el nombre de Modelo Logístico, y se expresamediante la ecuación diferencial
x′(t) =(k − εx(t)
)(x(t)− x∗
)k > 0, ε > 0, x∗ ≥ 0 con εx∗ < k. (2.30)
que cuando x∗ = 0 resulta ser un tipo de Ecuación Logística, similar a la que ya apareció almodelar la propagación de rumores.
2.7.1. Ejercicios
Problema 1. Determinar las soluciones de equilibrio de la ecuación (2.27). Si además latasa de crecimiento satisface que T ∈ C1(R), concluir que cada problema de valores inicialestiene solución única.
Problema 2. Supongamos que la tasa de crecimiento de una población está determinadapor la función T y que x∗ es el umbral de subsistencia. Consideremos también la funciónT (y) = T (y + x∗). Demostrar que x es solución de la ecuación (2.27) si y sólo si la funcióny(t) = x(t) − x∗ satisface que y′(t) = T (y(t)) y(t). Concluir que desde el punto de vistacualitativo, el efecto del umbral de subsistencia es poco relevante.
Problema 3. Demostrar que si una población se ajusta a la Ley de Malthus entonces tieneuna única población de equilibrio y determinarla.
Determinar la evolución de una población cuya tasa de crecimiento corresponde a laley de Malthus. Concluir que si la tasa de crecimiento es negativa o la población inicial nosupera el umbral, entonces la población se extingue en tiempo finito y hallar el instante dela extinción. Concluir también que si la tasa de crecimiento es positiva y la población inicialsupera el umbral de subsistencia entonces crece ilimitadamente. Puede aceptarse como válidoel modelo de Malthus para grande tamaños de población?
Problema 4. Consideremos el modelo de Verhults
x′(t) =(k − f
(x(t)
))(x(t)− x∗
), k > 0, x∗ ≥ 0, con f(x∗) < k,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

54 Ecuaciones diferenciales ordinarias. Modelación
donde f ∈ C(R) es continua, estrictamente creciente y no acotada en [0, +∞) y verificaademás que f(0) = 0.
i) Demostrar que además de la población umbral, existe otra población de equilibrio x∗
de tamaño x∗ superior al umbral.
ii) Demostrar que si en un instante la población es inferior a x∗ o superior a x∗ entoncesdebe decrecer, mientras que si se sitúa entre estos dos valores entonces crece. Con-cluir que si en un instante el tamaño de la población es inferior al umbral, entoncesdesaparece en tiempo finito.
iii) Si además f ∈ C1(R), demostrar que cada problema de valores iniciales tiene soluciónúnica. Concluir que si x0 > x∗ la solución maximal del problema de valores inicialesx′(t) =
(k − f
(x(t)
)) (x(t) − x∗
), x(0) = x0 está definida en [0, +∞) y satisface que
lımt→+∞
x(t) = x∗.
Problema 5. Demostrar que las dos únicas poblaciones de equilibrio para el modelo logístico(2.30) son x∗ y x∗ = ε−1k. Demostrar que el modelo logístico la tasa de crecimiento esproporcional a la diferencia entre la población y la población de equilibrio x∗.
Problema 6. Determinar el tamaño de una población que en el instante inicial tiene x0 ≥ 0individuos y cuya evolución se ajusta al modelo logístico (2.30).
Si x0 < x∗, concluir que la población desaparece en tiempo finito y determinar el momentoen el que se produce su extinción.
Si x∗ = ε−1k y x∗ < x0 < x∗, concluir que el tamaño de la población se mantiene siemprepor debajo del valor x∗ pero su tamaño crece hasta tener x∗ individuos en tiempo infinito,mientras que si x0 > x∗, entonces la población se mantiene siempre por encima del valor x∗
y su tamaño decrece hasta tener x∗ individuos en tiempo infinito.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

TEM
A3 SISTEMASLINEALES
3.1. Sistemas de calor/frío con varios compartimentos
En la sección 1.2 tratamos el problema de determinar la temperatura en un edificio queconsta de un solo compartimiento, como podría ser un nave industrial. Nos preocuparemosahora de modelizar una generalización de este problema partiendo de los mismos principiocfísicos. Supongamos que el edificio consta de varios compartimentos C1, ..., Cm comunicados ono entre sí. Para cada j = 1, ...,m denotaremos por xj(t) la temperatura en el compartimentoCj y consideremos Hj(t) el efecto en el cambio de xj(t) debido a las personas, a las máquinasque están funcionando y por Uj(t, xj) el efecto en el cambio de xj(t) debido a un sistemade aire acondicionado de tipo lineal con cararterística constante αj ≥ 0 instalado en Cj.En este caso, supondremos que para cada j = 1, . . . ,m existen un valor positivo x∗j ∈ RUj(t, xj) = αj(x
∗j − xj), para cada cada t.
Si kj > 0 y kji ≥ 0 son las constantes de proporcionalidad que, según la ley de Newtonregulan, el cambio de xj debido a la temperatura exterior y a la del compartimento Ci, i 6= j,respectivamente, entonces para cada j = 1, ..., m, xj(t) satisface la ecuación diferencial:
x′j(t) = kj
(T (t)− xj(t)
)+
m∑i=1i6=j
kji
(xi(t)− xj(t)
)+ αj
(x∗j − xj(t)
)+ Hj(t). (3.1)
Observar que en este caso, el concepto de solución del problema planteado debe involucrarlos valores de las funciones incógnitas x1, . . . , xm, que en vista de la experiencia es razonablesuponer que cada una de ellas depende de una constante. También parece razonable quetales constantes queden unívocamente determinadas si en un instante dado es conocida la
55

56 Ecuaciones diferenciales ordinarias. Sistemas Lineales
temperatura de cada uno de los compartimentos o salas del edificio. En términos matemáti-cos, esto significa que si en el instante t0 el valor de la temperatura en cada sala es conocido,por ejemplo igual a Tj grados, j = 1, . . . , m, la cuestión que planteamos es si el problema
x′j(t) = kj
(T (t)− xj(t)
)+
m∑i=1i6=j
kji
(xi(t)− xj(t)
)+ αj
(x∗j − xj(t)
)+ Hj(t),
xj(t0) = Tj, j = 1, . . . , m
(3.2)
tiene una única solución.
Si para cada j = 1, . . . , n definimos la función fj(t) = Hj(t)+kjTj(t)+αjx∗j y la constante
kjj = −kj − αj −m∑
i=1i6=j
kji, entonces las igualdades (3.1) se expresan como
x′1(t)...
x′m(t)
=
k11 · · · k1m... . . . ...
km1 · · · kmm
x1(t)...
xm(t)
+
f1(t)...
fm(t)
y es por tanto un sistema de m ecuaciones diferenciales ordinarias de primer orden. Ob-sérvese que a diferencia de los sistemas (2.13) y (2.14) que describen procesos, no lineal ylineal respectivamente, de desintegración en cadena, el anterior es un acoplado, esto es lasincógnitas x1, . . . , xm no pueden ser determinadas sino conjuntamente. Si ahora consider-amos el vector x0 = (T1, . . . , Tm)T , las funciones x, f : I −→ Rm cuyas componentes sonlas funciones incógnitas x1, . . . , xm y los datos f1, . . . , fm y la matriz K = (kij), entonceslas identidades (3.1) y más concretamente (3.2) pueden representarse de manera equivalentecomo el problema de valor inicial
x′(t) = Kx(t) + f(t), x(t0) = x0
análoga a (1.12) que corresponde al caso de un único compartimento, pero que ahora involu-cra funciones vectoriales.
Por tanto, de los problemas relativos a sistemas de calor/frío tratados hasta ahora, (1.3)y (1.11) son ecuaciones diferenciales ordinarias de primer orden, mientras que (3.1) es unsistema de m ecuaciones del mismo tipo. Además todas las situaciones pueden expresarse demanera unificada mediante la notación x′(t) = Kx(t) + f(t), donde el carácter vectorial delas funciones involucradas determina que tratamos con un sistema de ecuaciones.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Motivación 57
Un ejemplo importante del caso de varios compartimentos lo constituye el siguiente prob-lema: Se considera una barra homogénea de longitud ` cuyos extremos están en contacto conmedios cuyas temperaturas están reguladas por sistemas térmicos que las mantiene contro-ladas según las funciones T0 y T`, respectivamente.
Se supone que la barra está dividida en m partes iguales, donde m ≥ 2 y denotaremospor xj, j = 1, . . . ,m, a la temperatura del segmento j-ésimo de la barra. La aplicación de(3.1) determina las siguientes identidades
x′1(t) = k10
(T0(t)− x1(t)
)+ k12
(x2(t)− x1(t)
), k10, k12 ≥ 0,
x′j(t) = kjj−1
(xj−1(t)− xj(t)
)+ kjj+1
(xj+1(t)− xj(t)
), kjj−1, kjj+1 ≥ 0, 2 ≤ j ≤ m− 1,
x′m(t) = kmm−1
(xm−1(t)− xm(t)
)+ kmm+1
(T`(t)− xm(t)
), kmm−1, kmm+1 ≥ 0.
Como el material de la barra es homogéneo y todos los segmentos tienen la misma longitud, sesatisface que existe c ≥ 0 tal que kjj−1 = kjj+1 = c para cada j = 1, . . . ,m. Además, se sabeque la constante c es inversamente proporcional al cuadrado de la longitud de cada segmento
y por tanto c =k
h2, donde k es una constante característica del material, básicamente se
trata de su conductividad térmica, y h =`
m. Finalmente, si suponemos que en el segmento
j-ésimo existe una fuente de calor que aporta una cantidad de calor igual a Fj, resulta quelas variaciones de temperaturas en cada segmento están descritas por las igualdades
x′1(t) =k
h2
(T0(t)− x1(t)
)+
k
h2
(x2(t)− x1(t)
)+ F1(t),
x′j(t) =k
h2
(xj−1(t)− xj(t)
)+
k
h2
(xj+1(t)− xj(t)
)+ Fj(t), 2 ≤ j ≤ m− 1,
x′m(t) =k
h2
(xm−1(t)− xm(t)
)+
k
h2
(T`(t)− xm(t)
)+ Fm(t).
(3.3)
Para que el problema anterior esté correctamente formulado, es preciso también consid-erar la temperatura inicial de cada segmento de la barra, es decir suponer que están dadoslos valores xj(0) = uj, donde uj ∈ N∗, j = 1, . . . , m.
El proceso descrito responde a una discretización de un problema de difusión de caloren una barra homogénea en cuyas ecuaciones de equilibrio se expresan mediante el siguienteproblema:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

58 Ecuaciones diferenciales ordinarias. Sistemas Lineales
Encontrar u : [0, +∞)× [0, `] −→ R que satisfaga las identidades(
∂u
∂t
)
(t,x)
− k
(∂2u
∂x2
)
(t,x)
= F (t, x)
u(t, 0) = T0(t), u(t, `) = T`(t)
u(0, x) = u0(x)
En esta situación, para cada (t, x), el valor u(t, x) representa la temperatura del puntox ∈ [0, `] de la barra en el instante t ≥ 0 y en particular, u0 es la temperatura inicial dela barra, mientras que F (t, x) representa la densidad de una fuente de calor aplicada a labarra. Naturalmente, la continuidad de la función u exige que se satisfagan las condicionesde compatibilidad u0(0) = T0(0) y u0(`) = T`(0).
Si para cada j = 1, . . . ,m consideramos rj = j h, entonces u0(rj) = uj, j = 1, . . . , m.Observar que la condición de compatibilidad requiere en este caso que u1 = T0(0) y que
um = T`(0). Por otra parte, Q(t) =
∫ `
0
F (t, x) dx es el calor total aportado por la fuente en
el instante t ≥ 0, mientras que para cada j = 1, . . . , m, Fj(t) =
∫ rj
rj−1
F (t, x) dx representa la
aportación neta de calor en el segmento j-ésimo.
3.2. Derivación e integración de funciones matriciales
En la sección anterior hemos modelizado problemas que requieren el uso del lenguajevectorial y en particular de matrices que ese caso actuan de coefientes. Procederemos acontinuación a presentar la definición de función matricial.
Dados n,m ∈ N∗ y para cada i = 1, . . . , n, j = 1, . . . ,m la función aij : I −→ R, lafunción matricial de coeficientes aij, es la aplicación A : I −→Mn×m(R) determi-nada para cada t ∈ I por la asignación A(t) =
(aij(t)
). Además, para cada r ∈ N,
diremos que A es de clase Cr(I) si y sólo si todas las funciones coeficientes son declase Cr(I). Si A es de clase Cr(I) con r ≥ 1, denominaremos derivada de orden k,0 ≤ k ≤ r, de A a la aplicación matricial Ak) cuyas funciones componentes son lasderivadas de orden k de las funciones componentes de A, es decir a la aplicaciónmatricial determinada por la asignación Ak)(t) =
(a
k)ij (t)
), para cada t ∈ I.
(3.4)
Supongamos que las aplicaciones matriciales A : I −→Mn×m(R) y B : I −→Mm×k(R)tienen como coeficientes a las funciones aij y bj,l, i = 1, . . . , n, j = 1, . . . , m, l = 1, . . . , k,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Derivación e integración de funciones matriciales 59
respectivamente. Si C : I −→ Mn×k(R) es la aplicación matricial determinada por la asig-nación C(t) = A(t)B(t), para cada t ∈ I, entonces las funciones coeficientes de C están
determinadas por la igualdad cil(t) =m∑
j=1
aij(t)bjl(t), i = 1, . . . , n, l = 1, . . . , k.
Por tanto, si A y B son ambas de clase C1(I), entonces cil ∈ C1(I) para i = 1, . . . , n y
cada l = 1, . . . , k y además c′il(t) =m∑
j=1
a′ij(t)bjl(t)+m∑
j=1
aij(t)b′jl(t). En definitiva tenemos que
Si A : I −→ Mn×m(R) y B : I −→ Mm×k(R) son funciones matriciales declase C1(I), entonces su producto es una función matricial de clase C1(I) yademás (AB)′ = A′B + AB′.
(3.5)
Así pues, la regla de derivación de un producto de aplicaciones matriciales es idéntica ala de derivación de funciones escalares. Sin embargo, en general no podemos concluir que sesatisfagan otras propiedades que sí verifica la derivación de funciones escalares. Por ejemplo,si A : I −→Mm(R) es declase C1(I), entonces (A2)′ = A′A + AA′ y en general esta suma esdiferente de 2AA′ y de 2A′A, puesto que las matrices A y A′ no tienen por qué conmutar. Para
convencerse de ello basta considerar A(t) =
[1 t0 0
], lo que implica que A2(t) =
[1 t0 0
],
que A′(t) =
[0 10 0
]y también que
2A(t)A′(t) =
[0 20 0
]6=
[0 10 0
]
︸ ︷︷ ︸(A2(t)
)′6=
[0 00 0
]= 2A′(t)A(t).
Supongamos que A : I −→ Mm(R) es una aplicación matricial cuyas funciones compo-nentes son aij, i, j = 1, . . . , m. Como para cada t ∈ I la matriz A(t) es cuadrada, tienesentido considerar su determinante. Podemos pues definir la aplicación det A : I −→ R, quepara cada t ∈ I está dada por la identidad
det A(t) =∑
σ∈Sm
(−1)i(σ)a1σ(1)(t) · · · amσ(m)(t),
donde Sm es el grupo de las permutaciones de {1, . . . , m} e i(σ) es el índice de la permutaciónσ. De la expresión anterior se deduce inmediatamente que si A es clase Cr(I) con r ≥ 0,entonces det A también es de clase Cr(I). En particular, si A es de clase C1(I), utilizando la
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
60 Ecuaciones diferenciales ordinarias. Sistemas Lineales
Regla de derivación de un producto
Si f1, . . . , fn ∈ C(I), entonces (f1 · · · fn)′ =n∑
j=1
f1 · · · f ′j · · · fn (3.6)
obtenemos que
(det A(t)
)′=
∑σ∈Sm
(−1)i(σ)(a1σ(1)(t) · · · amσ(m)(t)
)′
=∑
σ∈Sm
(−1)i(σ)
m∑j=1
a1σ(1)(t) · · · a′jσ(j)(t) · · · amσ(m)(t)
=m∑
j=1
∑σ∈Sm
(−1)i(σ)a1σ(1)(t) · · · a′jσ(j)(t) · · · amσ(m)(t).
(3.7)
En definitiva tenemos que
si A : I −→ Mm(R) es una función matricial de clase C1(I), entonces su deter-minante es una función escalar de clase C1(I). Además, si para cada j = 1, . . . ,mconsideramos Aj : I −→ Mm(R) la aplicación matricial cuyas funciones compo-nentes son las mismas que las de A, excepto las correspondientes a la fila j-ésima
que se han sustituido por sus derivadas, entonces(det A
)′=
m∑j=1
det Aj.
(3.8)
De manera análoga a como hemos introducido el concepto de derivada de una aplicaciónmatricial podemos definir el de integral de una aplicación matricial. Concretamente,
Dados n,m ∈ N∗, para cada i = 1, . . . , n, j = 1, . . . , m la función aij ∈ C(I)y A = (aij) la aplicación matricial continua de coeficientes aij. Fijado t0 ∈ I,
definimos∫ t
t0
A(s) ds como la aplicación matricial de componentes∫ t
t0
aij(s) ds.(3.9)
Con estas notaciones, si B(t) =
∫ t
t0
A(s) ds es claro que se satisfacen el Teorema Funda-
mental del Cálculo, es decir B ∈ C1(I) y además B′(t) = A(t) para cada t ∈ I, así como la
Regla de Barrow, es decir, si A ∈ C1(I), entonces A(t)−A(t0) =
∫ t
t0
A′(s) ds, para cada t ∈ I.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Teoría general de sistemas lineales 61
3.3. Teoría general de sistemas lineales
El objetivo de esta sección es el estudio de los problemas de valor inicial cuando la EDO,o más exactamente el sistema de EDO, es lineal y de primer orden.
Datos para un sistema lineal de EDO
• El número natural no nulo m ∈ N∗ y el intervalo no trivial I ⊂ R.• Término Fuerza: f : I −→ Rm continua de componentes f1, . . . , fm.
• Coeficientes: aij : I −→ R continuas, i, j = 1, . . . , m.
• Matriz de Coeficientes: A : I −→Mm(R), A(t) =(aij(t)
).
Fijados estos datos, un sistema de m ecuaciones diferenciales ordinarias lineales o sistemalineal de EDO consiste en encontrar funciones x1, . . . , xm : I −→ R de clase C1(I) que paracada t ∈ I satisfagan la siguientes identidades
x′1(t) = a11(t) x1(t) + · · ·+ a1m(t) xm(t) + f1(t)
x′2(t) = a12(t) x1(t) + · · ·+ a2m(t) xm(t) + f2(t)
...
x′m(t) = am1(t) x1(t) + · · ·+ amm(t) xm(t) + fm(t)
(3.10)
Las conjunto de funciones x1, . . . , xm que satisfagan las propiedades anteriores se deno-minarán soluciones del sistema. En general cabe esperar que el conjunto de soluciones delsistema anterior posea m grados de libertad, de maner que hemos de imponer condicionesadicioneales para determinarlos. Así, fijados t0 ∈ y z1, . . . , zm ∈ R podemos plantear elsiguiente
Problema de valores incialesx′1(t) = a11(t) x1(t) + · · ·+ a1m(t) xm(t) + f1(t), x1(t0) = z1,
x′2(t) = a12(t) x1(t) + · · ·+ a2m(t) xm(t) + f2(t), x1(t0) = z2,
...
x′m(t) = am1(t) x1(t) + · · ·+ amm(t) xm(t) + fm(t), xm(t0) = zm,
que plantea la búsqueda de aquélla o aquéllas soluciones del sistema que satisfacen ademáslas condiciones fijadas.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
62 Ecuaciones diferenciales ordinarias. Sistemas Lineales
De forma equivalente, si x : I −→ Rm es una función de clase C1(I) el anterior sistemapuede expresarse como la EDO
x′(t) = A(t)x(t) + f(t), (3.11)
y en este caso x : I −→ Rm se denomina solución de la EDO. Análogamente, si consideramosx0 = (z1, . . . , zm)T ∈ Rm el anterior problema de valores iniciales se expresa como
x′(t) = A(t)x(t) + f(t), x(t0) = x0. (3.12)
Observar que al mismo problema lo estamos denominando sistema si lo expresamos conla notación de (3.10) o ecuación si lo expresamos como (3.11). Esta ambigüedad en la termi-nología que denomina sistema o ecuación al mismo problema, dependiendo solamente de supresentación, no debe en la práctica inducir a error ninguno. Cuando m = 1, la identidadanterior es una genuina EDO de primer orden, mientras que si m > 1, es decir si tanto fcomo x son funciones vectoriales de una variable real y A una aplicación matricial, la iden-tidad representa un sistema a pesar de que se denomine ecuación. Es por tanto el contextode cada problema el que determinará si tratamos una sola ecuación o un sistema de ellas.Observar también que si expresamos el problema como (3.11), entonces x es solución si ysólo si sus componentes son solución del problema expresado como (3.10).
Es claro que cuando m = 1, el sistema (3.11) se reduce simplemente a la EDO linealescalar estudiada en el Tema 1, que en cierta forma nos servirá de guía para reproducir enel caso general los resultados allí obtenidos. Para ello, necesitamos asumir como cierto unresultado relativo a la existencia y unicidad de solución de cada problema de valor inicial.
Existencia y unicidad
Cada problema de valores iniciales para el sistema lineal
x′(t) = A(t)x(t) + f(t)
tiene solución única.
Cuando analizamos las propiedades de la ecuación lineal escalar la que entonces denomi-namos ecuación homogénea asociada jugó un importante papel. Generalizaremos ahora esteconcepto al caso que nos ocupa.
Denominamos sistema homogéneo asociado al sistema x′(t) = A(t)x(t)+ f(t),al sistema lineal x′(t) = A(t)x(t). (3.13)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Teoría general de sistemas lineales 63
Como vimos en el caso escalar, las soluciones de la ecuación homogénea y las de ecuacióncompleta están relacionadas entre sí. Concretamente si x e y son soluciones de la EDO (3.11),entonces z(t) = x(t)−y(t) es una solución de la ecuación homogénea (3.13) y recíprocamentesi a una solución concreta de (3.11) le sumamos una solución de la ecuación homogéa (3.13)el resultado es una nueva solución de (3.11). en definitiva, tenemos que
si y es una solución concreta del sistema lineal x′(t) = A(t)x(t) + f(t), entoncescualquier otra solución se expresa como x = z + y donde z es una solución delsistema homogéneo z′(t) = A(t)z(t).
(3.14)
Por otra parte, la unicidad de solución de cada problema de valores iniciales permite ex-presar la propiedad anterior con más precisión, innecesaria en el caso de ecuaciones escalares:
Principio de superposición
Fijado m ∈ N∗, para cada aplicación matricial continua A : I −→Mm(R), el conjunto desoluciones del sistema homogéneo x′(t) = A(t)x(t) es un espacio vectorial real de dimen-sión m y para cada función continua f : I −→ Rm, el conjunto de soluciones del sistemax′(t) = A(t)x(t)+ f(t) tiene estructura de espacio afín cuya variedad lineal subyacente esel espacio vectorial de soluciones de la ecuación homogénea. Además, {x1, . . . , xm} es basede soluciones del sistema homogéneo si y sólo si existe t0 ∈ I tal que {x(t0), . . . , xm(t0)}es base de Rm y cuando esto ocurre, {x1(t), . . . , xm(t)} es base de Rm para todo t ∈ R.
La estructura de espacio vectorial para el conjunto de las soluciones del sistema homogé-neo y la espacio afín para el de las soluciones del sistema completo no son más que unalectura geométrica de la propiedad (3.14), por lo que sólo resta demostrar que la dimensiónde tales espacios es precisamente m.
La clave de todo el razonamiento estriba en el sencillo hecho siguiente: Como la funciónnula es solución del sistema homogéneo y cada problema de valores iniciales tiene una únicasolución,
si x : I −→ Rm es una solución de x′(t) = A(t)x(t) y x(t0) = 0para algún t0 ∈ I, entonces x(t) = 0 para cada t ∈ I. (3.15)
Consideremos ahora x1, . . . , xk, k soluciones del sistema homogéneo x′(t) = A(t)x(t) yfijemos t0 ∈ I y también los vectores vj = xj(t0) ∈ Rm, j = 1, . . . , k.
Si v1, . . . , vk son linealmente independientes, entonces las funciones x1, . . . , xk son lineal-mente independientes, ya que si existen α1, . . . , αk ∈ R tales que α1x1(t)+ · · ·+αkxk(t) = 0,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
64 Ecuaciones diferenciales ordinarias. Sistemas Lineales
para cada t ∈ I, es decir tales que la función x(t) = α1x1(t) + · · ·+ αkxk(t) es idénticamentenula, como x(t0) = α1v1 + · · ·+ αmvm = 0, la independencia lineal de v1, . . . , vk implica queα1 = · · · = αk = 0.
Recíprocamente, si las funciones x1, . . . , xk son linealmente independientes y existenα1, . . . , αk ∈ R tales que α1v1 + · · · + αkvk = 0, entonces x(t) = α1x1(t) + · · · + αkxk(t)es solución del sistema homogéneo y como x(t0) = α1v1 + · · ·+ αkvk = 0, (3.15) implica quex es la función nula. La independencia lineal de x1, . . . , xk determina que α1 = · · · = αk = 0y, en definitiva, que los vectores v1, . . . , vk son linealmente independientes.
El razonamiento anterior muestra que
si x1, . . . , xk son soluciones del sistema homogéneo, entonces son linealmenteindependientes si y sólo si existe t0 ∈ I tal que los vectores x1(t0), . . . , xk(t0)son linealmente independientes y que esto ocurre si y sólo si los vetoresx1(t), . . . , xk(t) son linealmente independientes para cada t ∈ I.
(3.16)
Como en Rm no puede haber sistemas de vectores linealmente independientes con más dem vectores, este resultado implica que que la dimensión del espacio de soluciones del sistemahomogéneo ha de ser menor o igual a m. Por otra parte, de la conclusión anterior tambiénse deduce que
si {v1, . . . , vm} es una base de Rm y consideramos t0 ∈ I y para ca-da j = 1, . . . , m la única solución del problema de valores inicialesx′(t) = A(t)x(t), x(t0) = vj, entonces {x1, . . . , xm} son linealmenteindependientes y por tanto base del espacio de soluciones del sistemahomogéneo, ya que son m elementos linealmente independientes en unespacio vectorial cuya dimensión es m a lo sumo.
(3.17)
El resultado anterior concluye la demostración del principio de superposición y deter-mina además un método para construir bases de soluciones del sistema homogéneo: bastaseleccionar una base de Rm, un punto t0 ∈ I y resolver los m problemas de valor inicial alos que estos datos dan lugar. Naturalmente la importancia de las bases de soluciones delsistema homogéneo radica en que cada una de ellas es suficiente para determinar todas lassoluciones de del sistema homogéneo. Concretamente,
si {x1, . . . , xm} es una base del espacio de soluciones del sistema homogéneo,entonces el espacio vectorial de las soluciones del sistema homogéneo estádeterminado por la identidad
{x(t) = c1x1(t) + · · ·+ cmxm(t) : c1, . . . , cm ∈ R}
.
(3.18)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Teoría general de sistemas lineales 65
Como comentábamos al comienzo de esta sección, nuestra intención es reproducir en lamedida de lo posible los resultados obtenidos para el caso escalar. Para ello, será cómodointroducir la siguiente notación matricial que recupera, al menos formalmente la situaciónunidimensional:
Consideremos x1, . . . , xk : I −→ Rm funciones de clase C1(I) y definamos la aplicaciónmatricial Φ: I −→Mm×k(R) dada por
Φ(t) =
x11(t) · · · x1k(t)... . . . ...
xm1(t) · · · xmk(t)
, para cada t ∈ I.
Entonces, es sencillo comprobar que si las funciones x1, . . . , xk son simultáneamente solu-ciones del sistema homogéneo x′(t) = A(t)x(t) entonces la aplicación matricial Φ satisfacela identidad Φ′(t) = A(t)Φ(t). Recíprocamente, si Φ: I −→ Mm×k(R) es una aplicaciónmatricial de clase C1(I) que satisface la identidad Φ′(t) = A(t)Φ(t) para cada t ∈ I, entoncessus k columnas de son soluciones del sistema homogéneo x′(t) = A(t)x(t).
Una aplicación matricial Φ: I −→Mm(R) de clase C1(I) se denomina matrizfundamental del sistema homogéneo x′(t) = A(t)x(t) si y sólo si sus columnasson base de soluciones del espacio de soluciones de tal sistema.
(3.19)
Los resultados anteriores y el principio de superposición establecen las condiciones paraque una aplicación matricial de clase C1(I) sea fundamental:
La aplicación matricial de clase C1(I), Φ: I −→Mm(R), es fundamentalpara el sistema homogéneo x′(t) = A(t)x(t) si y sólo si satisface laidentidad Φ′(t) = A(t)Φ(t) para cada t ∈ I y además existe t0 ∈ I talque detΦ(t0) 6= 0, o equivalentemente si y sólo si detΦ(t) 6= 0, paracada t ∈ I.
(3.20)
Del principio de superposición se desprende que si Φ: I −→ Mm(R) una aplicaciónmatricial de clase C1(I) que satisface que Φ′(t) = A(t)Φ(t) para cada t ∈ I, entonces obien detΦ(t) = 0 para cada t ∈ I o bien detΦ(t) 6= 0 para cada t ∈ I, dependiendo deque Φ sea fundamental o no. De hecho, como detΦ(t) ∈ C(I), si se verifica la segundapropiedad, entonces o bien detΦ(t) > 0 para cada t ∈ I o bien detΦ(t) < 0 para cadat ∈ I, lo que significa geométricamente que para cada t ∈ I, las columnas de Φ(t) son unabase con la misma orientación que la base canónica de Rm o con orientación opuesta a ésta,respectivamente.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

66 Ecuaciones diferenciales ordinarias. Sistemas Lineales
Como comprobaremos a continuación, es posible determinar exactamente la expresión deldeterminante de una aplicación matricial cuyas columnas son solución del sistema homogéneox′(t) = A(t)x(t). Consideremos Φ: I −→ Mm(R) una aplicación matricial de clase C1(I)que satisface que Φ′(t) = A(t)Φ(t) para cada t ∈ I y definamos la función w(t) = det Φ(t).Entonces, aplicando (3.8), obtenemos que
w′(t) =m∑
j=1
det Φ′j(t), Φ′
j(t) =
x11(t) · · · x1k(t)...
...x′j1(t) · · · x′jm(t)
......
xm1(t) · · · xmk(t)
, j = 1, . . . , m, t ∈ I.
Como las columnas de Φ son solución del sistema homogéneo, para cada j, i = 1, . . . , m
y cada t ∈ I, se satisface que x′ji(t) =m∑
s=1
ajs(t)xsi(t) y por tanto sustituyendo estos valores
en la expresión anterior y utilizando las propiedades básicas del cálculo de determinantes,obtenemos que
det Φ′j(t) =
m∑s=1
ajs(t)det
x11(t) · · · x1k(t)...
...xs1(t) · · · xsm(t)
......
xm1(t) · · · xmk(t)
= ajj(t)w(t).
En definitiva, w′(t) =( m∑
j=1
ajj(t))w(t), es decir w′(t) =
(tr A(t)
)w(t), para cada t ∈ I,
donde tr A denota la traza de la matriz A. Esta ecuación es escalar y homogénea y puedepor tanto integrarse explícitamente, según los resultados obtenidos en el Tema 1.
Lema de Abel-Liouville
Fijados m ∈ N∗, I un intervalo no trivial, t0 ∈ I y la aplicación matricial continuaA : I −→ Mm(R), para cada aplicación matricial Φ: I −→ Mm(R) de clase C1(I)tal que Φ′(t) = A(t)Φ(t), para cada t ∈ I se satisface que
det Φ(t) = det Φ(t0) e
∫ t
t0
trA(s) ds
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Teoría general de sistemas lineales 67
El hecho de que las columnas de una matriz fundamental constituyan una base del espaciode soluciones del sistema homogéneo permite obtener una expresión equivalente a (3.18) enlos siguientes términos:
Si Φ: I −→ Mm(R) es una matriz fundamental del sistema homogéneox′(t) = A(t)x(t), entonces el espacio vectorial de las soluciones de tal sistemaestá determinado por la identidad
{x(t) = Φ(t) c : c ∈ Rm}.
(3.21)
La expresión anterior para el espacio de soluciones del sistema homogéneo, permite ahoradeterminar fácilmente la única solución de cada problema de valores iniciales:
Si dados t0 ∈ I y x0 ∈ Rm planteamos el problema de valor inicial x′(t) = A(t)x(t),x(t0) = x0, entonces x(t) = Φ(t)c para algún c ∈ Rm. Como además x0 = x(t0) = Φ(t0)c, te-niendo en cuenta que Φ(t0) es una matriz invertible, resulta que c = Φ−1(t0)x0. En definitiva,hemos demostrado que
si Φ: I −→ Mm(R) es una matriz fundamental del sistema homogéneox′(t) = A(t)x(t), entonces para cada t0 ∈ I y cada x0 ∈ Rm la únicasolución del problema de valores iniciales x′(t) = A(t)x(t), x(t0) = x0, estádada por la identidad
x(t) = Φ(t)Φ−1(t0) x0.
(3.22)
Supongamos que ahora consideramos f : I −→ Rm continua y que nos planteamos lassoluciones del sistema x′(t) = A(t)x(t) + f(t).
Supuesta conocida Φ, una aplicación fundamental del sistema homogéneo, según el prin-cipio de superposición, para describir todas las soluciones del problema anterior es suficienteencontrar una solución particular del mismo. Siguiendo nuevamente los pasos del caso es-calar planteamos ahora la técnica de variación de las constantes que reformulada al caso noescalar consiste en buscar una función c : I −→ Rm de clase C1(I) tal que xp(t) = Φ(t)c(t)sea solución del sistema x′(t) = A(t)x(t) + f(t). Para que esto ocurra debe satisfacerse que
A(t) Φ(t)c(t) + f(t) =[φ(t)c(t)
]′= Φ′(t)︸︷︷︸
A(t)Φ(t)
c(t) + Φ(t)c′(t) =⇒ c′(t) = Φ(t)−1f(t),
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

68 Ecuaciones diferenciales ordinarias. Sistemas Lineales
de manera que c : I −→ Rm debe ser una primitiva de la función Φ(t)−1f(t). Así pues,
las soluciones del sistema x′(t) = A(t)x(t) + f(t) están determinadas por la ex-presión
x(t) = Φ(t)[c + α(t)
], c ∈ Rm
donde Φ es matriz fundamental del sistema homogéneo x′(t) = A(t)x(t) y lafunción α : I −→ Rm satisface que α′(t) = Φ−1(t)f(t).
(3.23)
Si ahora fijamos t0 ∈ I y x0 ∈ Rm, para identificar en la expresión (3.23) a la únicasolución del sistema que satisface estas condiciones iniciales procederemos como en el casoescalar, valorando en el punto t0: Como x0 = x(t0) = Φ(t0)
[c + α(t0)
], necesariamente
c = Φ−1(t0)x0 − α(t0), lo que implica que
x(t) = Φ(t)[Φ−1(t0)x0 − α(t0) + α(t)
]= Φ(t)Φ−1(t0)x0 + Φ(t)
[α(t)− α(t0)
].
Como α(t)− α(t0) es la única primitiva de Φ−1(t)f(t) que se anula en t0, resulta que
α(t)− α(t0) =
∫ t
t0
Φ−1(s)f(s) ds.
En definitiva hemos demostrado el resultado fundamental de este Tema:
Fórmula de Lagrange
Fijados m ∈ N∗, I un intervalo no trivial y A : I −→Mm(R) una aplicación matricialcontinua, si Φ: I −→ Mm(R) es una matriz fundamental del sistema homogéneox′(t) = A(t)x(t), entonces para cada t0 ∈ I, cada x0 ∈ Rm y cada f : I −→ Rm
continua, la función
x(t) = Φ(t)Φ−1(t0)x0 + Φ(t)
∫ t
t0
Φ−1(s)f(s) ds,
es la única solución global del problema de valores iniciales x′(t) = A(t)x(t) + f(t),x(t0) = x0.
Observemos que la Fórmula de Lagrange expresa la única solución del problema de val-ores iniciales x′(t) = A(t)x(t)+f(t), x(t0) = x0 como superposición de Φ(t)Φ−1(t0)x0, la única
solución del problema de valores iniciales x′(t) = A(t)x(t), x(t0) = x0 con Φ(t)
∫ t
t0
Φ−1(s)f(s) ds,
la única solución del problema de valores iniciales x′(t) = A(t)x(t) + f(t), x(t0) = 0.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La función de Green de un sistema lineal 69
3.4. La función de Green de un sistema lineal
Tanto en la identidad (3.22) como en el caso más general de la Identidad de Lagrange lasexpresiones que determinan la única solución de cada problema de valores iniciales para lossistemas lineales, homogéneos en el primer caso y generales en el segundo, están ligadas a laelección previa de una matriz fundamental del sistema homogéneo, o lo que es equivalente ala elección de una base del espacio de soluciones de tal sistema. Naturalmente, la unicidadde soluciones implica que el resultado final no puede depender de la base inicialmente fijada.Esta cuestión motiva que nos preocupemos de analizar la relación entre diferentes bases desoluciones del sistema homogéneo o, lo que es equivalente, entre dos matrices fundamentales.
Supongamos que A : I −→ Rm es una aplicación matricial continua y que Φ: I −→ Rm
es una matriz fundamental del sistema x′(t) = A(t)x(t).
Consideremos también Ψ: I −→ Mm(R) una aplicación matricial de clase C1(I) y talque Ψ′(t) = A(t)Ψ(t), para cada t ∈ I. Si y1, . . . , ym : I −→ Rm son las columnas de Ψ,entonces son soluciones del sistema lineal x′(t) = A(t)x(t) y por tanto, teniendo en cuenta(3.21), para cada j = 1, . . . ,m debe existir pj ∈ Rm tal que yj(t) = Φ(t)pj, para todot ∈ I. Si consideramos P ∈ Mm(R) la matriz cuyas columnas son p1, . . . , pm, resulta queΨ(t) = Φ(t)P , para cada t ∈ I.
Recíprocamente, dada P ∈ Mm(R) la aplicación matricial Ψ: I −→ Mm(R) definidapara cada t ∈ I como Ψ(t) = Φ(t)P satisface que es de clase C1(I) y además que
Ψ′(t) = Φ′(t)P = A(t)Φ(t)P = A(t)Ψ(t), para cada t ∈ I.
Por otra parte, teniendo en cuenta que det Ψ(t) = det Φ(t) det P , resulta que
si A : I −→ Rm es una aplicación matricial continua y Φ: I −→ Rm es unamatriz fundamental del sistema x′(t) = A(t)x(t), entonces una aplicación matricialΨ: I −→ Mm(R) de clase C1(I) satisface que Ψ′(t) = A(t)Ψ(t) si y sólo siexiste P ∈ Mm(R) tal que Ψ(t) = Φ(t)P , para cada t ∈ I. En particular, Ψ esfundamental del sistema si y sólo si P es no singular, es decir si y sólo si det P 6= 0.
(3.24)
En definitiva el resultado anterior muestra que dos matrices fundamentales, del mismosistema difieren en una matriz no singular. Esto significa que si Φ y Ψ son fundamentales ypara cada t ∈ I consideramos las bases de Rm determinadas por las columnas de Φ(t) y deΨ(t), entonces la matriz de cambio de una base a otra es independiente de t. En particular,como Ψ(t) = Φ(t)P para cada t ∈ I, si existe s ∈ I tal que Ψ(s) = Φ(s), entonces como
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
70 Ecuaciones diferenciales ordinarias. Sistemas Lineales
Ψ(s) = Φ(s)P y Φ(s) es invertible, necesariamente P = I y por tanto Ψ = Φ. Así pues,
si Φ y Ψ son matrices fundamentales del sistema x′(t) = A(t)x(t) y Φ(s) = Ψ(s)para algún s ∈ I, entonces Φ(t) = Ψ(t) para todo t ∈ I. En particular, para cadas ∈ I existe una única matriz fundamental Φ: I −→Mm(R) tal que Φ(s) = I.
(3.25)
Después de las propiedades anteriores, resulta que si Φ: I −→Mm(R) es una matriz fun-damental del sistema x′(t) = A(t)x(t), entonces fijado s ∈ I, como Φ(s) es no singular tienesentido Φ−1(s) y la aplicación matricial Ψ: I −→Mm(R) definida como Ψ(t) = Φ(t)Φ−1(s),para cada t ∈ I es también fundamental y como Ψ(s) = I, es la única matriz fundamentalcon esta propiedad. Así pues,
si Φ y Ψ son dos matrices fundamentales del mismo sistema, entonces paracada s ∈ I se satisface que Φ(t)Φ−1(s) = Ψ(t)Ψ−1(s), para cada t ∈ I, (3.26)
propiedad que permite introducir el concepto fundamental de esta sección:
Función de GreenSi I ⊂ R es un intervalo no trivial, m ∈ N∗ y A : I −→ Rm es una aplicación matricialcontinua, denominaremos Función de Green del sistema x′(t) = A(t)x(t) a la aplicaciónmatricial
G : I × I −→Mm(R)
(t, s) −→ Φ(t)Φ−1(s),
donde Φ: I −→ Rm es cualquier matriz fundamental del sistema.
Así pues la función de Green se construye tomando en cada s ∈ I el valor de la únicamatriz fundamental que en s coincide con la identidad. En particular, esto significa quefijado s ∈ I, para cada j = 1, . . . , n la columna j-ésima de G(t, s) es la única solución delproblema d evalores iniciales x′(t) = A(t)x(t), x(s) = ej, donde ej es el j-ésimo vector de labase canónica de Rm.
Como las componentes de Φ−1(s) están determinadas por cocientes de determinantes dematrices con componentes de clase C1(I), continuas, resulta que Φ−1(s) es de clase C1(I) ypor tanto, la función de Green es de clase C1(I × I) y en particular continua en I × I. Porotra parte, es inmediato comprobar que la función de Green satisface también las siguientespropiedades:
G(s, s) = I, para cada s ∈ I,
G(s, t) = G−1(t, s), para cada t, s ∈ I,
G(t, s)G(s, τ) = G(t, τ), para cada t, s, τ ∈ I.
(3.27)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Dependencia de los datos y Estabilidad de un Sistema Lineal 71
Es patente que la función de Green del sistema x′(t) = A(t)x(t) depende exclusivamentede la matriz de coeficientes A(t). Además la fórmula de Lagrange puede reescribirse entérminos de la función de Green como sigue:
Fórmula de Lagrange-Green
Fijados m ∈ N∗, I un intervalo no trivial y A : I −→Mm(R) una aplicación matricialcontinua, si G : I × I −→ Mm(R) es la función de Green del sistema homogéneox′(t) = A(t)x(t), entonces para cada t0 ∈ I, cada x0 ∈ Rm y cada f : I −→ Rm
continua, la función
x(t) = G(t, t0)x0 +
∫ t
t0
G(t, s)f(s) ds,
es la única solución global del problema de valores iniciales x′(t) = A(t)x(t) + f(t),x(t0) = x0.
Si nuevamente apelamos a la interpretación de la solución de cada problema de valoresiniciales x′(t) = A(t)x(t) + f(t), x(t0) = x0 en términos de la respuesta a la perturbaciónexterna f de un sistema físico, mecánico, químico, biológico, etc., y cuyas característicasestán recogidas en la matriz de coeficientes y cuyo estado en el instante t0 es conocido,x0, resulta que la función de Green aparece como una propiedad intrínseca del sistemafísico, mecánico, químico o biológico, que depende exclusivamente de sus características, unaespecie de caja negra del sistema, capaz de proporcionar la información sobre el estado delmismo a partir de las perturbaciones introducidas en él. De hecho, el primer sumando enla fórmula de Lagrange-Green representa la evolución del estado del sistema, no sometido aacciones externas, a partir del conocimiento del estado en un instante dado, mientras queel segundo sumando representa la evolución del estado del sistema que en el instante t0 sehallaba en reposo y que está sometido a la acción externa f . Es importante observar que enla determinación del estado del sistema en un instante t sólo intervienen los valores de lasacciones externas comprendidas entre t0 y t cuando t > t0 o entre t y t0 cuando t < t0.
Por otra parte, la relación sistema-función de Green es aún más estrecha: no sólo lascaracterísticas del sistema determinan la función de Green, si no que ésta determina a suvez aquéllas, es decir conocida la función de Green de un sistema, es posible determinarexplícitamente dicho sistema. Para comprobar esta propiedad basta observar que fijado s0 ∈ Iy considerada G(t, s0) como función de t, resulta que G′(t, s0) = A(t)G(t, s0) y por tanto,
G′(t, s0)G(s0, t) = A(t), para cada t ∈ I, (3.28)
donde se ha tenido en cuenta que G−1(t, s) = G(s, t).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

72 Ecuaciones diferenciales ordinarias. Sistemas Lineales
3.5. Dependencia de los datos y Estabilidad
Fijados los datos de un sistema lineal, la Fórmula de Lagrange determina la única soluciónde cada problema de valor inicial propuesto y deja clara la influencia de esos datos inicialesen dicha solución. Nos planteamos en esta sección determinar cómo varía la solución respectode la modificación de los datos iniciales. Comenzaremos con la siguiente definición
si I ⊂ R es un intervalo no trivial, A : I −→Mm(R) es continua y f : I −→ Rm
es continua denominamos Flujo del sistema x′(t) = A(t)x(t)+f(t) a la aplicación
ϕ : I × I × Rm −→ Rm
(t, s, x) −→ valor en t de la única solución de problema devalores iniciales x′(t) = A(t)x(t) + f(t), x(s) = x
(3.29)
La Fórmula de Lagrange establece una expresión explícita para el fujo de un sistema lineal,concretamente,
si Φ es una matriz fundamental del sistema x′(t) = A(t)x(t), entonces para cadaf : I −→ Rm continua el flujo del sistema x′(t) = A(t)x(t) + f(t) está dado porla identidad
ϕ(t, s, x) = Φ(t)Φ−1(s)x +
∫ t
s
Φ(t)Φ−1(u)f(u) du.
(3.30)
Nuestro propósito es por tanto estudiar la regularidad de la función anterior respecto desus argumentos. Para ello observemos primero que como detΦ es una función de clase C1(I)y no nula, la aplicación matricial Φ−1 es también de clase C1(I). Además, de la identidadId = Φ(t)Φ−1(t) para cada t ∈ I, resulta que
0 = Id′(t) =[Φ(t)Φ−1(t)
]′= Φ′(t)Φ−1(t) + Φ(t)(Φ−1)′(t),
lo que implica que
(Φ−1)′(t) = −Φ−1(t)Φ′(t)Φ−1(t) = −Φ−1(t)A(t)Φ(t)Φ−1(t) = −Φ−1(t)A(t).
De los razonamientos anteriores, deducimos ahora que ϕ ∈ C1(I×I×Rm). En particular,esto implica que la solución de cada problema de valor inicial para un sistema lineal varía no sólo
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Dependencia de los datos y Estabilidad de un Sistema Lineal 73
continuamente sino diferencialmente respecto de los datos iniciales. Nuestro siguiente propósitoes determinar las derivadas parciales del flujo, lo que podremos hacer fácilmente a partir de
su expresión. Para comenzar, si∂ϕ
∂t=
(∂ϕ1
∂t, . . . ,
∂ϕm
∂t
)T
, resulta que
∂ϕ
∂t= Φ′(t)Φ−1(s)x + Φ′(t)
∫ t
s
Φ−1(u)f(u) du + Φ(t)Φ−1(t)f(t)
= A(t)Φ(t)Φ−1(s)x + A(t)Φ(t)
∫ t
s
Φ−1(u)f(u) du + f(t) = A(t)ϕ(t, s, x) + f(t),
lo que era previsible ya que para s y x fijos ϕ es solución del sistema x′(t) = A(t)x(t)+ f(t).
Por otra parte, si∂ϕ
∂s=
(∂ϕ1
∂s, . . . ,
∂ϕm
∂s
)T
,
∂ϕ
∂s= Φ(t)
(Φ−1(s)
)′x− Φ(t)Φ−1(s)f(s) = −Φ(t)Φ−1(s)A(s)x− Φ(t)Φ−1(s)f(s)
= −Φ(t)Φ−1(s)[A(s)x + f(s)
].
Finalmente, si∂ϕ
∂x=
(∂ϕj
∂xi
), i, j = 1, . . . , m, resulta que
∂ϕ
∂x= Φ(t)Φ−1(s).
En definitiva, si consideramos(
∂ϕ
∂t,∂ϕ
∂s,∂ϕ
∂x
), hemos demostrado que
si ϕ es el flujo del sistema lineal x′(t) = A(t)x(t) + f(t), entonces ϕ es de claseC1(I × I × Rm) y además(
∂ϕ
∂t,∂ϕ
∂s,∂ϕ
∂x
)=
(A(t)ϕ(t, s, x)+f(t),−Φ(t)Φ−1(s)
[A(s)x+f(s)
], Φ(t)Φ−1(s)
).
(3.31)
Supongamos ahora fijados t0 ∈ I y x0 ∈ Rm y consideremos x la única solución delproblema de valor inicial x′(t) = A(t)x(t) + f(t), x(t0) = x0. Con las notaciones anteriores,x(t) = ϕ(t, t0, x0) y la continuidad del flujo en el punto (t0, t0, x0) establece que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

74 Ecuaciones diferenciales ordinarias. Sistemas Lineales
fijado ε > 0 existe δ > 0 tal que si |t− t0| ≤ δ y ||x0 − y|| ≤ δ, entonces
||ϕ(t, t0, x0)− ϕ(t, t0, y)|| ≤ ε
Las desigualdades anteriores, que son consecuencia de la continuidad del flujo, implicanque si en instante t0 consideramos dos condiciones iniciales “próximas”, las correspondientessoluciones permanecen “próximas” en un intervalo de tiempo. En muchos problemas prác-ticos interesa que esa “proximidad” entre las soluciones se mantenga a lo largo del tiempo.Naturalmente para que ello sea posible es imprescindible que el intervalo de definición delas soluciones permita considerar tiempos arbitrariamente largos, o en otras palabras que nosea acotado por la derecha, lo que implica que o bien I = R o bien debe ser de la formaI = (a, +∞) o I = [a, +∞) con a ∈ R. La búsqueda de la propiedad descrita conduce a lasiguiente noción:
Estabilidad de una soluciónSupongamos que el intervalo I no está acotado a la derecha y consideremos t0 ∈ Iy x0 ∈ Rm.
• Diremos que ϕ(t, t0, x0) es estable si dado ε > 0 existe δ > 0 tal que paracada x ∈ Rm con ||x − x0|| ≤ δ, entonces ||ϕ(t, t0, x) − ϕ(t, t0, x0)|| ≤ εpara todo t ≥ t0.
• Diremos que ϕ(t, t0, x0) es asintóticamente estable si es estable y exis-te δ > 0 tal que para cada x ∈ Rm con ||x − x0|| ≤ δ, entonceslımt→∞
||ϕ(t, t0, x)− ϕ(t, t0, x0)|| = 0
• Diremos que ϕ(t, t0, x0) es inestable si no es estable
Así pues, si x es la única solución del problema de valores iniciales x′(t) = A(t)x(t)+f(t),x(t0) = x0, para determinar si x es estable, fijado ε > 0, debemos encontrar, si ello es posible,δ > 0 tal que si ||y0 − x0|| ≤ δ, e y es la única solución del problema de valores inicialesy′(t) = A(t)y(t) + f(t), y(t0) = y0 entonces ||y(t)− x(t)|| ≤ ε para cada t ≥ t0.
Si consideramos ahora la función z′(t) = y(t)− x(t), entonces si z0 = z(t0) = y0 − x0, lacuestión de la estabilidad de x puede plantearse de manera equivalente como dado ε > 0,encontrar, si es posible, δ > 0 tal que si ||z0|| ≤ δ, entonces ||z(t)|| ≤ ε para cada t ≥ t0.
Por otra parte, como el sistema considerado es lineal, el principio de superposición es-tablece que z es la única solución del problema de valores iniciales z′(t) = A(t)z(t), z(t0) = z0.Ahora bien, si tomamos w(t) = 0, la función nula es claro que w es la única solución delproblema de valores iniciales w′(t) = A(t)w(t), w(t0) = w0 = 0 y además la estabilidad de xpuede establecerse de manera equivalente como dado ε > 0, encontrar, si es posible, δ > 0
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Dependencia de los datos y Estabilidad de un Sistema Lineal 75
tal que si ||z0|| = ||z0 − w0|| ≤ δ, entonces ||z(t)|| = ||z(t) − w(t)|| ≤ ε para cada t ≥ t0. enotras palabras x es estable si y sólo si w es estable. Naturalmente, podemos realizar el mismorazonamiento para establecer que la estabilidad asintótica de x es equivalente a la estabilidadasintótica de w como solución del sistema homogéneo.
Así pues las cuestiones de estabilidad, estabilidad asintótica o inestabilidad, de una solu-ción concreta del sistema x′(t) = A(t)x(t) + f(t) son equivalentes a las mismas cuestionesplanteadas para la solución nula del sistema homogéneo, así que son independientes deltérmino fuerza. Además como las cuestiones de estabilidad, estabilidad asintótica o inesta-bilidad son equivalentes a la verificación de dichas propiedades para la solución nula delsistema homogéneo, resulta que todas las soluciones de una EDO lineal tienen el mismocomportamiento. En resumen, hemos demostrado el siguiente resultado:
Una solución del sistema lineal x′(t) = A(t)x(t)+f(t) es estable, asintóticamenteestable o inestable si y sólo si todas las soluciones son estables, asintóticamenteestables o inestables, respectivamente y además la condición necesaria y suficientepara que esto ocurra es que la solución nula del sistema homogéneo asociadox′(t) = A(t)x(t) sea estable, asintóticamente estable o inestable, respectivamente.
(3.32)
Después del resultado obtenido tienen sentido las siguientes denominaciones:
Diremos que la aplicación matricial continua A : I −→ Rm es estable, asintótica-mente estable o inestable si la solución nula del sistema homogéneo x′(t) = A(t)x(t)es estable, asintóticamente estable o inestable, respectivamente.
(3.33)
Fijado el sistema lineal x′(t) = A(t)x(t) + f(t), la próxima cuestión que nos debemosplantear es la caracterizar la estabilidad de la aplicación matricial A(t).
Supongamos que la aplicación matricial A(t) es estable y fijemos t0. Dado ε = 1, debeexistir δ > 0 tal que cuando ||x0|| ≤ δ, si z es la única solución del problema de valoresiniciales x′(t) = A(t)x(t), entonces ||x(t)|| ≤ 1, para cada t ≥ t0.
Consideremos z una solución arbitraria del sistema z′(t) = A(t)z(t). Si ||z(t0)|| ≤ δ,entonces ||z(t)|| ≤ 1, para cada t ≥ t0. Si ||z(t0)|| > δ, entonces x0 = δ
||z(t0)|| z0 ∈ Rm satisfaceque ||x0|| = δ. Como x(t) = δ
||z(t0)|| z(t) es la única solución del problema de valores inicialesx′(t) = A(t)x(t), x(t0) = x0, resulta que ||x(t)|| ≤ 1, para cada t ≥ t0, lo que implica que||z(t)|| ≤ ||z(t0)||
δ, para cada t ≥ t0.
En definitiva, hemos demostrado que si A(t) es estable, fijado t0 ∈ I, cada solución delsistema homogéneo x′(t) = A(t)x(t) debe estar acotada a la derecha de t0.
Recíprocamente, si toda solución del sistema x′(t) = A(t)x(t) está acotada, consideremosx1, . . . , xm la base de soluciones del sistema x′(t) = A(t)x(t) tal que xj(t0) = ej, j = 1, . . . , m,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

76 Ecuaciones diferenciales ordinarias. Sistemas Lineales
donde {e1, . . . , em} es la base canónica de Rm. Como las funciones anteriores están acotadas,podemos tomar M1, . . . , Mm > 0 tales que ||xj(t)|| ≤ Mj, para cada t ≥ t0, j = 1, . . . , m yconsiderar M = max
j=1,...,m{Mj}.
Dado x0 = (x01, . . . , x0m)T ∈ Rm, entonces la única solución del problema de valoresiniciales x′(t) = A(t)x(t), x(t0) = x0 está dada por x(t) = x01x1(t) + · · · + x0mxm(t) y por
tanto ||x(t)|| ≤ Mm∑
j=1
|x0j| ≤ M√
n ||x0||, para cada t ≥ t0. Por tanto, dado ε > 0, basta
tomar δ = εM√
npara concluir que si ||x0|| ≤ δ, entonces ||x(t)|| ≤ ε, para cada t ≥ t0.
Las mismas técnicas demuestran un resultado análogo para el caso de la estabilidadasintótica. En resumen, hemos demostrado el siguiente resultado:
La aplicación matricial A : I −→ Mm(R) es estable o asintóticamente estable siy sólo si para cada t0 ∈ I toda solución del sistema homogéneo x′(t) = A(t)x(t)está acotada para t ≥ t0 o satisface que lım
t→+∞||x(t)|| = 0, respectivamente.
En particular, si Φ: I −→ Mm(R) es una matriz fundamental, entonces A esestable o asintóticamente estable si y sólo si fijado t0 ∈ I existe M > 0 tal que√
m∑i,j=1
Φ2ij(t) ≤ M , para cada t ≥ t0 ó lım
t→+∞Φ(t) = 0, respectivamente, donde 0
denota la matriz nula y el límite se efectúa componente a componente.
(3.34)
3.6. El Sistema Adjunto
Consideremos A : I −→ Mm(R) una aplicación matricial continua y Φ: I −→ Mm(R)una aplicación fundamental del sistema lineal x′(t) = A(t)x(t). Entonces es claro que
ΦT ∈ C(I) y que (ΦT )′ = (Φ′)T .
Por otra parte, en la sección anterior hemos demostrado que la aplicación matricial Φ−1
es también de clase C1(I) y que además
(Φ−1)′(t) = −Φ−1(t)A(t),
lo que finalmente implica que
(Φ−T )′(t) = −A(t)Φ−T (t). (3.35)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
El Sistema Adjunto 77
Las identidades anteriores motivan la siguiente definición:
Se denomina Sistema Adjunto de x′(t) = A(t)x(t) a y′(t) = −AT (t)y(t) (3.36)
Como es claro que el adjunto del sistema y′(t) = −AT (t)y(t) es x′(t) = A(t)x(t), resultaque un sistema coincide con su adjunto si y sólo si su matriz de coeficientes satisface queA(t) = −AT (t), para cada t ∈ I, es decir si y sólo si la matriz de coeficientes es antisimétrica.Un sistema con esta propiedad se denomina autoadjunto.
Si tenemos en cuenta que cuando Φ(t) es no singular, det Φ−T (t) = det Φ−1(t) =[det Φ(t)
]−1,la identidad (3.35) implica que
Φ es matriz fundamental del sistema x′(t) = A(t)x(t) si y sólo siΦ−T es matriz fundamental de y′(t) = −AT (t)y(t)
(3.37)
Consideremos Φ matriz fundamental de x′(t) = A(t)x(t) y Ψ: I −→ Mm(R) una apli-cación matricial cde clase C1(I). Entonces, teniendo en cuenta que Φ−T es fundamental parael problema adjunto y aplicando (3.24) resulta que Ψ′(t) = −AT (t)Ψ(t) para cada t ∈ I si ysólo si existe P ∈Mm(R) tal que
Ψ(t) = Φ−T (t)P lo que implica que ΨT (t)Φ(t) = P T , cada t ∈ I.
Además Ψ es fundamental para el sistema adjunto si y sólo si P es no singular. Por tanto,
Si Φ es matriz fundamental del sistema x′(t) = A(t)x(t), entonces Ψ es matrizfundamental del sistema adjunto si y sólo si existe M ∈ Mm(R) no singular talque para cada t ∈ I se satisface ΨT (t)Φ(t) = M .
(3.38)
Supongamos que x, y : I −→ Rm son soluciones del sistema x′(t) = A(t)x(t) y de suadjunto y′(t) = −AT (t)y(t). Como Φ es matriz fundamental del primer sistema y Ψ lo es desu adjunto, entonces existen x0, y0 ∈ Rm tales que x(t) = Φ(t)x0 e y(t) = Ψ(t)x0. Si paracada t ∈ I, consideramos los vectores x(t) e y(t), entonces el resultado anterior tiene unainterpretación geométrica inmediata: y(t)T x(t) = yT
0 ΨT (t)Φ(t)x0 = yT0 Mx0, para cada t ∈ I
y por tanto, el producto escalar entre los vectores x(t) e y(t) permanece constante.
Si ahora particularizamos estos resultados al caso de sistemas autoadjuntos, obtenemos
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
78 Ecuaciones diferenciales ordinarias. Sistemas Lineales
que
si A = −AT y Φ es matriz fundamental del sistema x′(t) = A(t)x(t), entoncesexiste M ∈ Mm(R) simétrica y definida positiva tal que para cada t ∈ I se sa-tisface ΦT (t)Φ(t) = M . En particular, si Φ(s) es ortogonal para algún s ∈ I,entonces Φ(t) es ortogonal para todo t ∈ I.
(3.39)
Como consecuencia, si x e y son soluciones del sistema autoadjunto anterior, entonces losvectores x(t) e y(t) tienen longitud constante y el ángulo entre ellos también es constante.
3.6.1. El Teorema Fundamental de Curvas Planas
Sean I ⊂ R un intervalo no trivial y c : I −→ R2 una curva regular, es decir tal quec′(s) 6= 0 para cada s ∈ I, y parametrizada por la longitud de arco, es decir, tal que ||c′(s)|| = 1
para cada s ∈ I. El vector tangente a c es t : I −→ R2, definido como t(s) = c′(s), para cadas ∈ I. En estas condiciones sabemos que
Existe n : I −→ R2 de clase C1(I), denominada vector normal a c tal que para cadas ∈ I, {t(s), n(s)} es base ortonormal de R2, positivamente orientada, es decir talque det [t(s), n(s)] = 1. Además, existe k ∈ C(I), denominada curvatura de c talque t′(s) = k(s)n(s) y n′(s) = −k(s)t(s), para cada s ∈ I.
Si t1, t2 son las componentes del vector tangente y n1, n2 las del vector normal, las iden-tidades anteriores implican que
[t′1(s) n′1(s)t′2(s) n′2(s)
]=
[t1(s) n1(s)t2(s) n2(s)
] [0 −k(s)
k(s) 0
]
o expresado de manera equivalente,
[t′1(s) t′2(s)n′1(s) n′2(s)
]=
[0 k(s)
−k(s) 0
] [t1(s) t2(s)n1(s) n2(s)
]
Por tanto, si consideramos la aplicación matricial Φ: I −→ M2(R) definida para cadas ∈ I como Φ(s) = [t(s), n(s)]T , entonces se satisfacen las
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

El Sistema Adjunto 79
Ecuaciones de Frenet
Φ′(s) =
[0 k(s)
−k(s) 0
]Φ(s), para cada s ∈ I
es decir Φ es una matriz fundamental de x′(t) = A(t)x(t), donde A(t) =
[0 k(s)
−k(s) 0
]se
denomina matriz de Frenet.
Recíprocamente, sean k ∈ C(I) y la matriz de Frenet determinada por ella es decir,
la aplicación matricial A(s) =
[0 k(s)
−k(s) 0
]. Si fijamos s0 ∈ I y consideramos Φ la
única matriz fundamental del sistema x′(s) = A(s)x(s) tal que Φ(s0) = Id, entonces comoA(s) = −AT (s) el resultado (3.39) asegura que ΦT (s)Φ(s) = Id, para cada s ∈ I. Si Φ(s) =[
t1(s) t2(s)n1(s) n2(s)
]y consideramos t(s) =
(t1(s), t2(s)
)T y n(s) =(n1(s), n2(s)
)T , entonces
la función c(s) =
∫ s
s0
t(u) du, s ∈ I, es una curva parametrizada por arco cuya tangente y
normal son t y n, respectivamente y cuya curvatura es k.
Supongamos ahora que c : I −→ R2 es otra curva parametrizada por arco cuya curvatura
es k. Si tn son los vectores tangente y norma a c y consideramos Ψ(s) =
[t1(s) t2(s)n1(s) n2(s)
],
entonces Ψ es matriz fundamental del sistema x′(s) = A(s)x(s) y además ΨT (s)Ψ(s) = Id ydetΨ(s) = 1, para cada s ∈ I. Como Φ y Ψ son matrices fundamentales del mismo sistemaautoadjunto, (3.38) implica que existe una matriz M tal que ΨT (s)Φ(s) = M , para cadas ∈ I. Además, la matriz M satisface que
MT M = ΦT (s) Ψ(s)ΨT (s)︸ ︷︷ ︸Id
Φ(s) = ΦT (s)Φ(s) = Id y detM = detΨT (s)detΦ(s) = 1.
Por otra parte, como ΨT (s)Φ(s) = M y Φ es ortogonal, necesariamente ΨT (s) = MΦT (s),lo que implica que t(s) = Mt(s), para cada s ∈ I, es decir c ′(s) = Mc′(s), para cada s ∈ I.Por tanto, fijado s0 ∈ I, si consideramos el vector v = c(s0)−Mc(s0), entonces tal que
c(s) = c(s0) +
∫ s
s0
c ′(u) du = c(s0) + M
∫ s
s0
c′(u) du = Mc(s) + v, para cada s ∈ I.
Los resultados anteriores constituyen el contenido del
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

80 Ecuaciones diferenciales ordinarias. Sistemas Lineales
Teorema Fundamental de Curvas Planas
Si k : I −→ R es continua, existe una curva regular parametrizada por arco quetiene a k como curvatura, única salvo movimiento propio de sólido rígido, es decir, sic1, c2 : I −→ R2 son dos curvas regulares parametrizadas por arco que tienen a k comocurvatura, entonces existen M ∈ M2(R) tal que MT M = Id y det M = 1 y v ∈ R2
de manera que c2(s) = Mc1(s) + v, para cada s ∈ I.
3.6.2. El Teorema Fundamental de Curvas Espaciales
Sean I ⊂ R un intervalo no trivial y c : I −→ R3 una curva regular, es decir tal quec′(s), c′′(s) 6= 0 para cada s ∈ I, y parametrizada por la longitud de arco, es decir, tal que||c′(s)|| = 1 para cada s ∈ I. El vector tangente a c es t : I −→ R3, definido como t(s) = c′(s),para cada s ∈ I. En estas condiciones sabemos que
Existen n, b : I −→ R2 de clase C1(I), denominadas vectores normal y binormal a c talesque para cada s ∈ I, b(s) = t(s)×n(s) y por tanto, {t(s), n(s), b(s)} es base ortonormalde R3, positivamente orientada, es decir tal que det [t(s), n(s), b(s)] = 1. Además, existenk, τ ∈ C(I), denominadas curvatura y torsión de c tales que k(s) > 0 y t′(s) = k(s)n(s),n′(s) = −k(s)t(s)− τ(s)b(s) y b′(s) = τ(s)n(s), para cada s ∈ I.
Si t1, t2, t3 son las componentes del vector tangente, n1, n2, n3 las del vector normal yb1, b2, b3 las del vector binormal, las identidades anteriores implican que
t′1(s) t′2(s) t′3(s)n′1(s) n′2(s) n′3(s)b′1(s) b′2(s) b′3(s)
=
0 k(s) 0−k(s) 0 −τ(s)
0 τ(s) 0
t1(s) t2(s) t3(s)n1(s) n2(s) n3(s)b1(s) b2(s) b3(s)
Por tanto, si consideramos la aplicación matricial Φ: I −→ M2(R) definida para cadas ∈ I como Φ(s) = [t(s), n(s), b(s)]T , entonces se satisfacen las
Ecuaciones de Frenet
Φ′(s) =
0 k(s) 0−k(s) 0 −τ(s)
0 τ(s) 0
Φ(s), para cada s ∈ I,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 81
es decir Φ es matriz fundamental de x′(t) = A(t)x(t), donde A(t) =
0 k(s) 0−k(s) 0 −τ(s)
0 τ(s) 0
se denomina matriz de Frenet. El mismo razonamiento del caso plano, adaptado ahora al casoespacial permite concluir con el
Teorema Fundamental de Curvas Espaciales
Dadas las funciones k, τ ∈ C(I) con k > 0, existe una curva regularparametrizada por arco que tiene a k como curvatura y a τ como torsión,única salvo movimiento propio de sólido rígido, es decir, si c1, c2 : I −→ R3 son doscurvas regulares parametrizadas por arco que tienen a k como curvatura y a τ comotorsión, entonces existen M ∈ M3(R) tal que MT M = Id y det M = 1 y v ∈ R3 demanera que c2(s) = Mc1(s) + v, para cada s ∈ I.
3.7. Ejercicios
Problema 1. Supongamos que en los problemas de mezclas abordados en la Sección 2.2, enlugar de un único recipiente, tenemos un sistema S formado por m recipientes R1, ..., Rm,intercomunicados entre sí y con el exterior de S. Para cada j = 1, ...,m y en cada instantet, son conocidos Vj(t), el volumen de la disolución en Rj, f j
e (t) la cantidad de disolución queentra en Rj desde el exterior de S, f jj
s (t) la cantidad de disolución que sale desde Rj haciaal exterior de S, y para cada i 6= j, f ij
s (t) la cantidad de disolución que sale de Rj hacia elrecipiente Ri. Por supuesto, si f j
e es nulo, esto significa que en Rj no entra disolución desdeel exterior de S y se pueden hacer interpretaciones análogas a la posible anulación de f j
s yf ij
s .
Si para cada j = 1, . . . , n, denotamos por xj(t) a la cantidad de soluto presente en Rj enel instante t, demostrar que x1, . . . , xm deben satisfacer el siguiente sistema de ecuacionesdiferenciales ordinarias de primer orden:
x′j(t) = cje(t)f
je (t) +
m∑k=1i6=j
f jis (t)
Vi(t)xi(t)− 1
Vj(t)
(m∑
i=1
f ijs (t)
)xj(t), j = 1, . . . , m.
Concluir que si para cada i, j = 1, . . . ,m definimos las funciones aji(t) =f ji
s (t)
Vi(t)si i 6= j,
ajj(t) = − 1
Vj(t)
n∑i=1
f ijs (t) y fj(t) = cj
e(t)fje (t), entonces la ecuación anterior se expresa como
el sistema lineal
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

82 Ecuaciones diferenciales ordinarias. Sistemas Lineales
x′1(t)...
x′m(t)
=
a11(t) · · · a1m(t)... . . . ...
am1(t) · · · amm(t)
x1...
xm
+
f1(t)...
fm(t)
.
Determinar las condiciones para que el sistema tenga equilibrios y en ese caso hallarlos todos.
Problema 2. El plomo es un componente presente en muchos objetos de la vida cotidianacomo tuberías de agua, pinturas, utensilios de vidrio, etc. Sin embargo es tóxico y las concen-traciones altas en sangre y tejidos da lugar a un serio deterioro de las capacidades mentalesy motrices de los individuos.
El plomo entra en el cuerpo humano por medio de alimentos, aire y agua, con una tasa deentrada que podemos suponer que es una función continua f , y se acumula en la sangre desdedonde se transfiere a los tejidos y huesos con tasas k21, k31 ≥ 0, respectivamente. Por otraparte, el plomo acumulado en tejidos y huesos se transfiere a la sangre con tasas k12, k13 ≥ 0,respectivamente, y no existe ninguna transferencia entre huesos y tejidos. Finalmente, elplomo acumulado en la sangre es expulsado por medio de la orina con una tasa k01 ≥ 0, elacumulado en los tejidos se expulsa por medio del cabello, las uñas y el sudor con una tasak02 ≥ 0, mientras que el plomo acumulado en los huesos no se expulsa directamente sino através de su transferencia a la sangre.
Si denominamos x(t), y(t) y z(t) a la cantidad de plomo en la sangre, los tejidos y huesos,respectivamente, demostrar que dichas funciones son solución del sistema lineal
x′(t) = −(k01 + k21 + k31) x(t) + k12y(t) + k13z(t) + f(t),
y′(t) = k21x(t)− (k02 + k12) y(t),
z′(t) = k31x(t)− k13z(t).
Si f es constante y todas las constantes de transferencia son estrictamente positivas,demostrar que que el sistema anterior tiene una única solución de equilibrio y hallarla.Concluir que si la entrada f se reduce, también lo hace en el mismo porcentaje la soluciónde equilibrio.
Supongamos que reducimos la ingesta de plomo a αf donde 0 < α < 1, y que mediantemedicamentos aumentamos la expulsión de plomo por orina y sudor, es decir sustituimos k01
y k02 por βk01 y γk02 donde β, γ > 1. ¿Cuál es el efecto en la solución de equilibrio?
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 83
Problema 3. Considérese A : I −→Mm(R) una aplicación matricial de clase C1(I) tal queA y A′ conmutan. Demostrar que (Ak)′ = kAk−1A′ = kA′Ak−1 para cada k ∈ N∗.
Problema 4. Sean I ⊂ R un intervalo, A : I −→ Mm(R) continua y Φ una matriz fun-damental para la EDO x′(t) = A(t)x(t). ¿Puede existir B : I −→ Mm(R) continua tal queΦ′(t) = B(t)φ(t) y B 6= A?
Problema 5. Sean I ⊂ R un intervalo no trivial y A : I −→ Mn(R) tal que A ∈ C1(I).Determinar la condición necesaria y suficiente para que siendo x(t) solución del sistemax′(t) = A(t)x(t), x′(t) también lo sea. Demostrar que en este caso x ∈ C∞(I) y que ademáspara cada k ∈ N, la función xk)(t) es también solución del sistema.
Problema 6. Consideremos la aplicación matricial Φ: R −→M2(R) definida por
Φ(t) =
[t2 t3
t t2
]
¿Existe alguna aplicación matricial continua A : R −→Mn(R) tal que Φ′(t) = A(t)φ(t) paracada t ∈ R ?
Problema 7. Sean I ⊂ R un intervalo no trivial y A : I −→Mm(R) una aplicación matricialcontinua cuyos coeficientes satisfacen que aii = amm y ai,i+1 6= 0, para cada i = 1, . . . ,m− 1,mientras que aij = 0, para cada i, j = 1, . . . , m tales que j 6= i, i + 1.
Hallar una matriz fundamental del sistema homogéneo x′(t) = A(t)x(t).
Problema 8. Sea A : R −→Mm(R) una aplicación matricial continua y periódica de perío-do τ . Demostrar que si x es solución del sistema x′(t) = A(t)x(t), entonces y(t) = x(t+τ) tam-bién es solución. Concluir que si Φ es fundamental entonces Φ(t) = Φ(t + τ) es también fun-damental y por tanto existe P ∈Mm(R) una matriz no singular y tal que Φ(t+ τ) = Φ(t)P ,para cada t ∈ R.
Problema 9. Se consideran m ∈ N∗, I ⊂ R un intervalo no trivial A : I −→ Mm(R)una aplicación matricial continua y x1, . . . , xm : I −→ Rm soluciones del sistema homogéneox′(t) = A(t)x(t). Para cada t ∈ I, consideremos P (t) el paralelepípedo que tiene al origen decoordenadas como uno de sus vértices y a los vectores x1(t), . . . , xm(t) como lados (aquí sepermiten las situaciones degeneradas en las que por ejemplo algún lado se sitúa sobre otrolado o incluso tiene longitud nula).
Para cada t ∈ I, determinar vol P (t), el volumen de P (t), y concluir que el volumen esconstante si y sólo si tr A(t) = 0, para cada t ∈ I.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

84 Ecuaciones diferenciales ordinarias. Sistemas Lineales
Problema 10. Si consideremos la aplicación matricial continua A : I −→ Mm(R) y G la
función de Green del sistema x′(t) = A(t)x(t), determinar∂G
∂ty
∂G
∂s.
Problema 11. Sea A : I −→ Mn×m(R) una aplicación matricial continua y G(t, s) la fun-ción de Green del sistema x′(t) = A(t)x(t). Demostrar que GT (s, t) es la función de Greendel sistema adjunto.
Problema 12. Demostrar que todas las soluciones de la EDO x′(t) = 0 son estables perono asintóticamente estables.
Problema 13. Demostrar que todas las soluciones de la EDO x′(t) = −x(t) son asintótica-mente estables.
Problema 14. Se considera el sistema lineal x′(t) = A(t)x(t)+f(t) definido en un intervaloI no acotado a la derecha. Demostrar que si para cada t0 ∈ I todas sus soluciones estánacotadas para t ≥ t0, entonces el sistema es estable. Recíprocamente, si el sistema es estable yuna solución es acotada para t ≥ t0, demostrar que entonces todas las soluciones del sistemaestán acotadas para t ≥ t0.
Problema 15. Determinar un ejemplo de ecuación lineal no homogénea estable y otro as-intóticamente estable y cuyas soluciones no estén acotadas.
Problema 16. Consideremos I un intervalo o bien de la forma (a, +∞) o [a, +∞) o bienI = R y la aplicación matricial continua A : I −→ Mn(R). Utilizar la continuidad deldeterminante y la Fórmula de Abel-Liouville para demostrar las siguientes afirmaciones:
i) Si A es estable, entonces para cada t0 ∈ I la función∫ t
t0
trA(s) ds está acotada supe-
riorente en [t0, +∞). Concluir que si existen t0 ∈ I y a > 0 tales que trA(t) ≥ a paracada t ≥ t0, entonces A es inestable.
ii) Si A es asintóticamente estable, entonces para cada t0 ∈ I, lımt→+∞
∫ t
t0
trA(s) ds = −∞.
Concluir que si existe t0 ∈ I tal que trA(t) ≥ 0 para cada t ≥ t0, entonces A no esasintóticamente estable.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

TEM
A4MÉTODOS DE SOLUCIÓNDE SISTEMAS LINEALES
4.1. Introducción
En el tema anterior hemos demostrado que para conocer todas las soluciones de unsistema lineal de primer orden es suficiente disponer de una matriz fundamental del sistemahomogéneo. En este tema nos preocuparemos precisamente de describir condiciones bajo lascuales es posible calcular explícitamente una matriz fundamental del sistema homogéneox′(t) = A(t)x(t). De hecho, mostraremos que esto es siempre posible cuando la matriz decoeficientes es constante y posteriormente nos preocuparemos de generalizar las técnicas deeste caso a situaciones en las que la matriz de coeficientes tiene como componentes funcionesno constantes.
Consideremos por tanto A ∈Mm(R) una matriz de orden m y el correspondiente sistemahomogéneo de coeficientes constantes x′(t) = Ax(t). Nuestra intención es obtener métodosde cálculo de una matriz fundamental de dicho sistema y para ello serán de utilidad lasherramientas provenientes del Álgebra Lineal.
Supongamos primero que la matriz A es diagonalizable, es decir que existen dos matricesP,D ∈Mm(R) con P no singular y D diagonal tales que A = PDP−1. Entonces x es solucióndel sistema x′(t) = Ax(t) si y sólo si satisface que x′(t) = PDP−1x(t), es decir si y sólo siP−1x′(t) = DP−1x(t). Si ahora consideramos y : R −→ Rm definida como y(t) = P−1x(t)para cada t ∈ R, es claro que y ∈ C1(R) y que x es solución del sistema x′(t) = Ax(t) siy sólo si y′(t) = Dy(t), que es un sistema totalmente desacoplado de m ecuaciones lineales
escalares de primer orden cuya solución es inmediata: Si D =
λ1
. . .λm
, entonces
y(t) =(c1e
tλ1 , . . . , cmetλm)T , lo que implica que
85

86 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
x(t) = Py(t) = P
etλ1
. . .etλm
c1...
cm
, c1, . . . , cm ∈ R.
Así pues,
si la matriz A es diagonalizable y P,D ∈ Mm(R) con P no singular y Ddiagonal son tales que A = PDP−1, entonces una matriz fundamental delsistema lineal x′(t) = Ax(t) está dada por
Φ(t) = P
etλ1
. . .etλ1
, donde D =
λ1
. . .λm
.
(4.1)
De los resultados básicos del Álgebra Lineal, conocemos que no toda matriz de ordenm es diagonalizable, pues la condición necesaria y suficiente para que esto ocurra es quetodas las raíces del polinomio característico de A sean reales y además sus multiplicidades
algebraica y geométrica coincidan. Por ejemplo esto no ocurre si A =
(1 01 1
), que tiene a
λ = 1 como raíz doble de su polinomio característico con multiplicidad geométrica igual a 1,de hecho el espacio de autovectores asociado es el generado por el segundo vector de la basecanónica de R2.
No obstante, el cálculo explícito de una matriz fundamental puede aún realizarse pormétodos elementales, que involucran sólo resolver ecuaciones lineales escalares de primerorden, cuando la matriz de coeficientes triangula, es decir, existen P, T ∈ Mm(R) con Pno singular y T triangular tales que A = PTP−1. Nuevamente, x es solución del sistemax′(t) = Ax(t) si y sólo si y : R −→ Rm definida como y(t) = P−1x(t) para cada t ∈ R,satisface que y′(t) = Ty(t) y este sistema puede ser resuelto fácilmente de forma progresivasi T es triangular inferior o regresiva si T es triangular superior. De hecho, siempre podemossuponer que T =
(tij
)es triangular inferior, es decir tij = 0 cuando 1 ≤ i < j ≤ m, pues el
paso de una triangular inferior a una superior supone simplemente una permutación de lascolumnas de P . En este caso, si para cada j = 1, . . . , m, λj = tjj, tenemos que
y′1(t) = λ1y1(t) y y′j(t) = λjyj(t) + tjj−1yj−1(t) + · · ·+ tj1y1(t), j = 2, . . . , m.
Es claro que y1(t) = etλjc1, c1 ∈ R y supuestas conocidas las funciones y1, . . . , yj−1 lafunción yj se obtiene resolviendo la EDO lineal de primer orden no homogénea,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Introducción 87
y′j(t) = λjyj(t) + fj(t), donde fj(t) = tjj−1yj−1(t) + · · ·+ tj1y1(t), t ∈ R.
Así pues, teniendo en cuenta el método de variación de las constantes, resulta que
si la matriz A es triangulable y P, T ∈ Mm(R) con P no singular y T trian-gular inferior son tales que A = PTP−1, entonces una matriz fundamentaldel sistema lineal x′(t) = Ax(t) está dada por
Φ(t) = P
etλ1
h21(t) etλ2
... . . .hm1(t) · · · etλm
,
donde las funciones hij deben calcularse de forma progresiva.
(4.2)
La identidad anterior tiene como limitación el que no es posible disponer a priori de unaexpresión general para las funciones hij involucradas, que sólo pueden ser obtenidas una vezcalculadas hrj con r < i, aunque en cada caso concreto el método determina una matrizfundamental. Una limitación más importante la constituye el hecho de que como sabemos dela teoría básica del Álgebra Lineal, no toda matriz cuadrada es triangulable, pues la condiciónnecesaria y suficiente para que esto sea posible es que las raíces del polinomio característico
de A sean reales. Por ejemplo, si A =
(1 1−1 1
), entonces A no es triangulable puesto que
las raíces de su polinomio característico son 1± i.
Acabamos de comprobar que existe una estrecha relación entre propiedades algebraicas dela matriz de coeficientes A y las soluciones del sistema lineal x′(t) = Ax(t). Profundizaremosun poco más en este tipo de propiedades. Supongamos que λ ∈ R es un autovalor de A yque v ∈ Rm es un autovector correspondiente a λ. Si consideramos la función x(t) = et λv,resulta que
x′(t) = λ et λv = et λλ v = et λAv = Ax(t),
es decir, x(t) es solución del sistema. Más generalmente, tenemos que
Si λ1, . . . , λk ∈ R son autovalores de A y v1, . . . , vk ∈ Rm son autovec-tores correspondientes a ellos y linealmente independientes, entonces las funcionesx1(t) = etλ1v1, . . . , xk(t) = etλkvk son soluciones linealmente independientes dex′(t) = Ax(t) ya que
{x1(0), . . . , xk(0)
}=
{v1, . . . , vk
}.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

88 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
En el resultado anterior no importa que algunos autovalores sean iguales. En particular podríaocurrir que λ1 = · · · = λk ya que lo importante es la independencia lineal de los autovectores.
Si tenemos en cuenta que una matriz de orden m diagonaliza si y sólo si existe una basede Rm formada por autovectores, el resultado (4.1) no es más que aplicar el razonamientoanterior, ya que las columnas de P son precisamente las componentes de los autovectorescorrespondientes a λ1, . . . , λn.
Supongamos ahora que λ = a + i b con a, b ∈ R y b 6= 0 es un autovalor complejo de A yconsideremos u = v + i w con v, w ∈ Rm un autovector complejo correspondiente. Entoncesv y w son linealmente independientes y además se satisface que
Au = λu, es decir A(v + iw) = (a + ib)(v + iw), lo que implica que{
Av = av − bw,Aw = bv + aw.
Si siguiéramos los pasos efectuados cuando λ ∈ R, la función z(t) = et λu debería sersolución compleja del sistema x′(t) = Ax(t). Vamos a comprobar que en esencia esto es así.Para ello tendremos en cuenta la definición de exponencial para números complejos
si z = a + ib con a, b ∈ R, entonces ez = ea+ib = ea(cosb + i sen b), (4.3)
lo que implica que
z(t) = et λu = eta+itb(v+iw) = eat(cos(bt) v−sen(bt) w
)+i eat
(cos(bt) w+sen(bt) v
).
La anterior expresión motiva que consideremos las funciones x, y : I −→ Rm definidas como
[x(t)
y(t)
]=
[eat
(cos(bt) v − sen(bt) w
)
eat(cos(bt) w + sen(bt) v
)]
= eajt[v, w]
[cos(bt) sen(bt)
− sen(bt) cos(bt)
]
donde [v, w] ∈ Mm,2(R) es la matriz cuyas columnas son las componentes de los vectores vy w. Resulta entonces que
x′(t) = eat(acos(bt) v − a sen(bt) w − b sen(bt) v − bcos(bt) w
)
= eat(cos(bt) [av − bw]− sen(bt) [bv + aw]
)= eat
(cos(bt) Av − sen(bt) Aw
)= Ax(t)
y′(t) = eat(acos(bt) w + a sen(bt) v − b sen(bt) w + bcos(bt) v
)
= eat(cos(bt) [aw + bv] + sen(bt) [av − bw]
)= eat
(cos(bt) Aw + sen(bt) Av
)= Ay(t)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Introducción 89
es decir x e y son soluciones del sistema y además linealmente independientes puesto quex(0) = v e y(0) = w. Más generalmente tenemos el siguiente resultado:
Sean λ1, . . . , λr ∈ R autovalores de A ∈ Mm(R) y u1, . . . , ur ∈ Rm autovectorescorrespondientes y linealmente independientes. Sean también a1 + ib1, . . . , as + ibs conb1, . . . , bs 6= 0 autovalores de A y v1 + iw1, . . . , vs + iws autovectores correspondientesy linealmente independientes. Entonces las funciones
zk(t) = etλkuk, k = 1, . . . , r[xj(t)yj(t)
]= eajt[vj, wj]
[cos(bjt) sen(bjt)
− sen(bjt) cos(bjt)
], j = 1, . . . , s
son soluciones linealmente independientes de x′(t) = Ax(t)
(4.4)
En particular,
Si A ∈ Mm(R) diagonaliza en C y λ1, . . . , λm ∈ R y a1 ± ib1, . . . , as ± ibs ∈ C, conb1, . . . , bs 6= 0, son los autovalores y u1, . . . , ur ∈ Rm y v1 ± iw1, . . . , vs ± iws ∈ Cm
los autovectores correspondientes, entonces el sistema {u1, . . . , ur, v1, w1, . . . , vs, ws} esbase de Rm. Si consideramos P = [u1, . . . , ur, v1, w1, . . . , vs, ws] ∈ Mm(R), entoncesuna matriz fundamental del sistema x′(t) = Ax(t) es
Φ(t) = P
eλ1t
. . .eλmt
ea1tE1(t). . .
eastEs(t)
,
donde Ej(t) =
[cos(bjt) sen(bjt)
− sen(bjt) cos(bjt)
]
(4.5)
En definitiva, si la matriz A diagonaliza, tanto si tiene todos sus autovalores reales comosi los tiene complejos, entonces la fórmula (4.5) determina una matriz fundamental que seexpresa en términos de la parte real y de la parte imaginaria de los autovalores y asimismo dela parte real e imaginaria de los autovectores. Si la matriz no diagonaliza, pero tiene todos susautovalores reales, es decir si triangula como mariz de coeficientes reales, entonces (4.2) de-scribe un método para encontrar una matriz fundamental. Es importante remarcar que (4.2)no determina explícitamente la expresión de tal matriz fundamental sino que sólo describeun procedimiento para determinarla. De hecho, debemos encontrar una base donde la matriz
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

90 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
triangula y depués resolver progresiva o regresivamente ecuaciones escalares de primer or-den. En la práctica, incluso para matrices de tamaño relativamente pequeño ambos procesosinvolucran un esfuerzo de cálculo considerable. Por otra parte, si la matriz tiene autovalorescomplejos para los cuales no diagonaliza, cano recemos de métodos para determinar matri-ces fundamentales. En definitiva, salvo cuando la matriz A diagonalice, no tenemos métodoselementales para determinar fácilmente matrices fundamentales del sistema x′(t) = Ax(t) ypor tanto, deberemos recurrir a resultados más profundos. Concretamente, utilizaremos unacombinación de técnicas analíticas con otras provenientes del Álgebra Lineal, referentes altratamiento de matrices de coeficientes reales.
4.2. La exponencial de una matriz
La estrategia que seguiremos para resolver los sistemas con matriz de coeficientes cons-tante, será similar a la que hicimos valer en el tratamiento de la teoría general y que no esotra que reproducir, en la medida de lo posible, las técnicas y resultados del caso escalar, esdecir del caso m = 1. Como en esta situación las matrices se identifican con escalares, lastécnicas referidas no deben involucrar, de momento, ningún recurso del Álgebra Lineal. Enesta situación, A ∈ R y además sabemos que todas las soluciones de la EDO están dadaspor la expresión x(t) = eAtc con c ∈ R, o de forma equivalente la función Φ(t) = eAt es unamatriz fundamental y de hecho la única tal que Φ(0) = 1. Más aún la función de Green dela EDO es G(t, s) = eA(t−s).
Utilizando ahora la definición de la función exponencial, o si se prefiere, su desarrollo enserie de potencias en torno al origen, resulta que
etA = 1 + tA +t2
2A2 + · · ·+ tn
n!An + · · · = lım
k→∞
k∑n=0
tn
n!An =
∞∑n=0
tn
n!An
y por tanto, la anterior matriz fundamental para la EDO se expresa como
Φ(t) =∞∑
n=0
tn
n!An, (4.6)
Las propiedades de derivación de las series de potencias determinan que la derivada deuna función que se expresa de este modo es la serie de potencias obtenida derivando la serieoriginal término. Por tanto,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La exponencial de una matriz 91
Φ′(t) =∞∑
n=0
(tn
n!An
)′=
∞∑n=1
tn−1
(n− 1)!An = A
∞∑n=0
tn
n!An = AΦ(t), t ∈ R.
Así pues, la justificación de que Φ(t) = eAt sea una matriz fundamental de la EDOx′(t) = Ax(t) cuando A ∈ R descansa en el hecho de que la derivada de etA es igual a AetA,propiedad que es consecuencia de la definición de la función etA como suma de la serie de
potencias∞∑
n=0
tn
n!An, es decir como límite de la sucesión de sumas parciales lım
k→∞
k∑n=0
tn
n!An.
A la vista de las expresiones anteriores parece natural preguntarse si dichos desarrollostendrán vigencia en el caso general m > 1 o, en otras palabras, si podemos sustituir en lasanteriores identidades el escalar A por una matriz de orden m. La respuesta es afirmativa,pero antes de formularla de manera rigurosa, es conveniente hacer algunas precisiones ydefiniciones:
Si para cada i, j = 1, . . . , m consideramos la sucesión de números reales{aij(n)
}∞n=0
y para cada n ∈ N la matriz An =(aij(n)
), la notación
lımn→∞
An = A donde A =(aij
) ∈Mm(R) expresa el hecho de que para cada
i, j = 1, . . . ,m, la sucesión aij(n) converge hacia aij, o de forma equivalenteque para cada j = 1, . . . , n la sucesión formada por las columnas j-ésimasconverge hacia la columna j-ésima de A.
(4.7)
Observar que en las condiciones anteriores lımn→∞
An = A si y sólo si para cada v ∈ Rm lasucesión de vectores Anv converje hacia el vector Av. Más generalmente, se satisface que
si {An}∞n=1 es una sucesión de matrices de orden m tal que An → A, entonces,para cada k ∈ N∗, cada B ∈ Mk×m(R) y cada C ∈ Mm×k(R) se satisfaceque BAn → BA y que AnC → AC.
Supongamos que A = (aij) ∈Mm(R) y consideremos v = (v1, . . . , vm)T ∈ Rm, w = Av y
w = (w1, . . . , wm)T . Entonces, para cada i = 1, . . . , m tenemos que wi =m∑
j=1
aijvj y aplicando
la Desigualdad de Schwarz, resulta que
|wi| ≤√√√√
m∑j=1
a2ij
√√√√m∑
j=1
v2j = ||v||
√√√√m∑
j=1
a2ij,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

92 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
donde || · || es la norma euclídea en Rm. De la desigualdad anterior concluimos que
||w||2 =m∑
i=1
w2i ≤ ||v||2
m∑i,j=1
a2ij,
de manera que si definimos
||A|| =√√√√
m∑i,j=1
a2ij (4.8)
entonces||Av|| ≤ ||A|| ||v||, para cada v ∈ Rm, (4.9)
que implica que ||A2v|| ≤ ||A|| ||Av|| ≤ ||A||2||v|| y más generalmente que ||Akv|| ≤ ||A||k||v||,para cada k ∈ N∗.
Si A ∈Mm(R), A0 se define como la matriz identidad I. Además, si k ∈ N∗ la expresión
Sk = I+A+1
2A2+· · ·+ 1
k!Ak =
k∑n=0
1
n!An determina una matriz de orden m. Si consideramos
ahora v ∈ Rm, resulta que si j ≤ k, aplicando la desigualdad triangular de la norma euclídea,es decir que ||v1 + · · ·+ vk|| ≤ ||v1||+ · · · ||vk||, para cada v1, . . . , vk ∈ Rm,
∣∣∣∣∣
∣∣∣∣∣
(k∑
n=j
1
n!An
)v
∣∣∣∣∣
∣∣∣∣∣ ≤k∑
n=j
1
n!||Anv|| ≤
k∑n=j
1
n!||A||n||v|| =
(k∑
n=j
1
n!||A||n
)||v||
Como la serie de números positivos∞∑
j=0
||A||nn!
es convergente, de hecho su suma es igual
a e||A||, su sucesión de sumas parciales es de Cauchy, lo que teniendo en cuanta la última de-
sigualdad, implica que para cada v ∈ Rm la sucesión de vectores
(k∑
n=0
1
n!An
)v es de Cauchy
en Rm y por tanto convergente, lo que prueba que la sucesión de matricesk∑
n=0
1
n!An converge a
una matriz de orden m que denotaremos por∞∑
n=0
1
n!An. Los razonamientos anteriores motivan
la siguiente definición:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La exponencial de una matriz 93
Exponencial de una matriz
Si A ∈Mm(R), se denomina exponencial de A a la matriz eA =∞∑
n=0
1
n!An.
En particular, si A = 0, entonces eA = I. Por otra parte, para cada t ∈ R, tiene sentido la
matriz etA =∞∑
n=0
tn
n!An. Como cada componente de etA es una serie de potencias, es derivable
y la derivada se obtiene derivando la serie término a término. Esta propiedad implica que
(etA
)′=
∞∑n=0
( tn
n!An
)′=
∞∑n=1
tn−1
(n− 1)!An = A
∞∑n=1
tn−1
(n− 1)!An−1 =
( ∞∑n=1
tn−1
(n− 1)!An−1
)A
y por tanto que(etA
)′= AetA = etAA. Los razonamientos anteriores muestran que
Si A ∈ Mm(R), entonces la aplicación matricial Φ: R −→Mm(R) definidacomo Φ(t) = etA para cada t ∈ R, es una matriz fundamental del sistemax′(t) = Ax(t) y de hecho la única matriz fundamental tal que Φ(0) = I. Enparticular, aplicando la fórmula de Abel-Liouville, det etA = et trA, para cadat ∈ R.
(4.10)
Observar que (4.10) significa que la aplicación matricial Φ(t) =∞∑
n=0
tn
n!An satisface que
Φ′(t) = AΦ(t) para cada t ∈ R y que además Φ(0) = I, con lo que recuperamos la situación(4.6) del caso escalar, donde m = 1 y A ∈ R, de manera que la definición de exponencial deuna matriz aparece como una generalización de la de exponencial de un número real y tienelas mismas propiedades en cuanto a su derivación. No obstante, no todas las propiedades dela exponencial de números reales tienen su análogo en la caso matricial. La diferencia básicaentre la exponencial de una matriz y la exponencial de un número real consiste en que sibien ea+b = eaeb = ebea para cada a, b ∈ R, en general no se verifica que si A,B ∈ Mm(R)entonces eA+B = eAeB, como muestra el siguiente ejemplo:
Sea a 6= 0 y consideramos las matrices A =
(0 0a 0
)y B =
(0 a0 0
).
Entonces An = Bn = 0 para n ≥ 2, lo que implica que
eA = I + A =
(1 0a 1
)y eB = I + B =
(1 a0 1
).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

94 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Por otra parte, A + B =
(0 aa 0
)= a
(0 11 0
), lo que implica que para cada n ∈ N∗,
(A + B)2n = a2n
(1 00 1
)y (A + B)2n−1 = a2n−1
(0 11 0
)
y por tanto que
eA+B =∞∑
n=0
1
n!(A + B)n =
∞∑n=0
a2n
(2n)!
∞∑n=1
a2n−1
(2n− 1)!∞∑
n=1
a2n−1
(2n− 1)!
∞∑n=0
a2n
(2n)!
=
(ch a sh ash a ch a
).
Ahora es claro que como a 6= 0, tenemos que ch a > 1 y por tanto
eA+B =
(ch a sh ash a ch a
)6= eAeB =
(1 aa 1 + a2
)6= eBeA =
(1 + a2 a
a 1
).
La razón de que la exponencial de una suma de números reales coincida con el productode las correspondientes exponenciales y que esta propiedad no sea válida para matrices deorden superior a 1 radica en el hecho de que dos números reales siempre conmutan mientrasque esta propiedad no es cierta para dos matrices de orden mayor que 1.
Supongamos ahora que A,B ∈ Mm(R), satisfacen que AB = BA. Entonces, para cadak ∈ N∗ tenemos que
B
[k∑
n=0
1
n!Ak
]=
[k∑
n=0
1
n!BAk
]=
[k∑
n=0
1
n!AkB
]=
[k∑
n=0
1
n!Ak
]B,
y tomando límites cuando k →∞, resulta que BeA = eAB. Por tanto, si consideremos ahorala aplicación matricial Φ(t) = etAetB, entonces
Φ′(t) =(etA
)′etB + etA
(etB)′ = AetAetB + etABetB = (A + B)etAetB = (A + B)Φ(t)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La exponencial de una matriz 95
es decir Φ es fundamental para el sistema x′(t) = (A + B)x(t). Como además Φ(0) = I,resulta que Φ es la única matriz fundamental del sistema x′(t) = (A + B)x(t) cuyo valor ent = 0 es la matriz identidad, lo que implica que Φ(t) = et(A+B).
Recíprocamente, si et(A+B) = etAetB, para cada t ∈ R, entonces, derivando a ambos ladosde la identidad obtenemos que
(A + B)et(A+B) = AetAetB + etABetB, para cada t ∈ R,
y derivando nuevamente a ambos lados de la igualdad,
(A + B)2et(A+B) = A2etAetB + 2AetABetB + etAB2etB, para cada t ∈ R.
Si ahora tomamos t = 0 en la identidad anterior, obtenemos que (A+B)2 = A2+2AB+B2
y como (A + B)2 = A2 + AB + BA + B2, resulta finalmente que AB = BA.
Finalmente, aplicando la fórmula de Abel-Liouville a t = 1, obtenemos que para cadaA ∈ Mm(R), det eA = etr A, lo que en particular implica que eA es una matriz invertible.Más aún, como A y −A conmutan y e0 = I, tenemos que I = e0 = eA−A = eAe−A y portanto que
(eA
)−1= e−A. En definitiva, la exponencial de una matriz verifica las siguientes
propiedades, que son la generalización de las correspondientes a la exponencial de númerosreales:
i) Si A ∈ Mm(R), entonces Φ(t) = etA satisface que Φ′(t) = AΦ(t), paracada t ∈ R y además que Φ(0) = e0 = I.
ii) Si A,B ∈Mm(R) son tales que AB = BA, entonces BeA = eAB y ademáseA+B = eAeB = eBeA.
iii) Si A,B ∈ Mm(R), entonces AB = BA si y sólo si et(A+B) = etAetB, paracada t ∈ R.
iv) Si A ∈Mm(R), entonces AeA = eAA y det eA = etr A.
v) Si A ∈Mm(R), entonces(eA
)−1= e−A.
(4.11)
Teniendo en cuenta que la propiedad (i) anterior establece que para cada A ∈ Mm(R)la aplicación matricial Φ(t) = etA es fundamental para el sistema x′(t) = Ax(t), obtenemosla siguiente reformulación de la Fórmula de Langrange-Green para el caso de sistemas concoeficientes constantes:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

96 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Fórmula de Lagrange-Green para coeficientes constantes
Fijados m ∈ N∗ y A ∈Mm(R) entonces la aplicación matricial G : R× R −→Mm(R)definida como G(t, s) = e(t−s)A es la función de Green del sistema x′(t) = A(t)x(t).Por tanto, para cada intervalo no trivial I ⊂ R, cada función continua f : I −→ Rm,cada t0 ∈ I y cada x0 ∈ Rm la función
x(t) = e(t−t0)Ax0 +
∫ t
t0
e(t−s)Af(s) ds, t ∈ I,
es la única solución global del problema de valores iniciales x′(t) = A(t)x(t) + f(t),x(t0) = x0.
Como vemos, anterior Fórmula de Langrange-Green permite concluir que la función deGreen de sistemas lineales con coeficientes constantes depende exclusivamente de la diferenciaentre sus argumentos. Como veremos a continuación esta propiedad caracteriza a los sistemaslineales con coeficientes constantes.
Para comenzar, es fácil comprobar que si x ∈ C1(R) es una solución del sistema concoeficientes constantes x′(t) = Ax(t), entonces para cada s ∈ R la función y : R −→ Rm
definida como y(t) = x(t− s) satisface que y′(t) = x′(t− s) = Ax(t− s) = Ay(t) de maneraque es también solución del sistema. Por tanto, si A ∈ Mm(R) y Φ: R −→ Mm(R) esmatriz fundamental del sistema x′(t) = Ax(t), entonces para cada s ∈ R, Ψ: R −→Mm(R)definida como Ψ(t) = Φ(t−s) es también fundamental. En particular, si Φ es la única matrizfundamental tal que Φ(0) = I, entonces Φ(t− s) es la única matriz fundamental cuyo valoren s coincide con I, es decir G(t, s) = Φ(t− s).
Recíprocamente, sea A : R −→Mm(R) continua y supongamos que la función de Greendel sistema lineal de primer orden x′(t) = A(t)x(t) satisface que G(t, s) = Φ(t−s) para cadat, s ∈ R. Entonces, tomando s = 0, obtenemos que Φ(t) = G(t, 0) y por tanto, Φ es la únicamatriz fundamental del sistema anterior tal que Φ(0) = G(0, 0) = I, lo que en particularimplica que Φ′(t) = A(t)Φ(t) para cada t ∈ R. En consecuencia, para cada s ∈ R fijado,Φ′(t− s) = A(t− s)Φ(t− s), para cada t ∈ R.
Por otra parte, como fijado s ∈ R la aplicación matricial Ψ(t) = G(t, s) es la únicamatriz fundamental tal que Ψ(s) = I, tenemos que Ψ′(t) = A(t)Ψ(t) y como la hipótesisinicial establece que Ψ(t) = Φ(t− s), obtenemos que Φ′(t− s) = A(t)Φ(t− s). En conclusiónpara cada s ∈ R fijado tenemos que A(t)Φ(t− s) = A(t− s)Φ(t− s), es decir A(t) = A(t− s)ya que Φ(t− s) es invertible. Por tanto, dado t ∈ R, si tomamos s = t, la identidad anteriorimplica que A(t) = A(0) de forma que la aplicación matricial A es constante. Naturalmenteen esta situación se satisface que G(t, s) = e(t−s)A.
En definitiva, en esta sección hemos caracterizado los sistemas lineales de primer ordencon matriz de coeficientes constante y además hemos expresado la solución de cada problema
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La exponencial de una matriz 97
de valores iniciales, o equivalentemente la función de Green del sistema, en términos de laaplicación exponencial, obteniendo así una expresión análoga a la conseguida en el primertema para el caso escalar. No obstante, el problema de determinar explícitamente la soluciónde cada problema de valores iniciales, o si se prefiere la función de Green del sistema, aúnno ha sido resuelto ya que determinar explícitamente la solución de un problema de valoresiniciales significa expresar cada una de sus componentes, que son funciones reales de variablereal, en términos de funciones elementales de variable real.
El problema de determinar la expresión de las soluciones de un sistema lineal con coe-ficientes constantes queda reducido al cálculo de exponenciales de matrices, concretamentesi A es la matriz de coeficientes a las exponenciales de las matrices tA con t ∈ R. Ahorabien, el cálculo de este tipo de matrices requiere la evaluación de las potencias sucesivas dela matriz A y posteriormente la suma de todas ellas multiplicadas en cada caso por un factor
de la formatk
k!.
Para tener una idea de la complicación que puede suponer el realizar todas estas opera-
ciones, es suficiente intentar calcular etA donde A =
(1 03 2
). Primeramente, observamos
que A2 =
(1 0
3(1 + 2) 22
), A3 =
(1 0
3(1 + 2 + 22) 23
), de manera que podemos proponer
que
Ak =
1 0
3k−1∑n=0
2n 2k
. (4.12)
Claramente la anterior expresión es cierta para k = 1, y también para k = 2. Supuestacierta para k, calculemos Ak+1:
Ak+1 =
1 0
3k−1∑n=0
2n 2k
(1 03 2
)=
1 0
32k + 3k−1∑n=0
2n 2k+1
=
1 0
3k∑
n=0
2n 2k+1
.
En definitiva, la fórmula (4.12) es correcta. Además, comok∑
n=0
2n = 2k+1 − 1, para cada
k ∈ N, resulta que
Ak =
(1 0
3(2k − 1) 2k
), para cada k ∈ N. (4.13)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

98 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Por tanto,
etA =∞∑
n=0
tn
n!An =
∞∑n=0
tn
n!0
3∞∑
n=0
tn
n!(2n − 1)
∞∑n=0
tn
n!2n
=
(et 0
3(e2t − et) e2t
). (4.14)
Observar que en este caso A es triangular y por tanto, el sistema x′(t) = Ax(t) puederesolverse directamente sin apelar a la construcción de etA. Si denotamos por x1 y x2 a lascomponentes de la solución, obtenemos que
x′1(t) = x(t) y que x′2(t) = 3x1(t) + 2x2(t)
y por tanto que x1(t) = etc1 y x′2(t) = 2x2(t) + 3etc1, con c1 ∈ R. Utilizando la fórmula devariación de las constantes, resulta que
x2(t) = e2tc2 + 3c1e2t
∫ t
0
e−2ses ds = e2tc2 − 3etc1, donde c1, c2 ∈ R,
que, expresado en términos matriciales, se reescribe como
(x1(t)x2(t)
)=
(et 0−3et e2t
) (c1
c2
), donde c1, c2 ∈ R. (4.15)
La anterior identidad implica que Φ(t) =
(et 0−3et e2t
)es matriz fundamental del sis-
tema x′(t) = Ax(t). Como Φ(0) =
(1 0−3 1
), Φ−1(0) =
(1 03 1
), lo que implica que
Φ(t)Φ−1(0) =
(et 0−3et e2t
)(1 03 1
)=
(et 0
3(e2t − et) e2t
), (4.16)
es la única matriz fundamental cuyo valor en t = 0 coincide con I, es decir etA.
En el ejemplo analizado queda patente que es más complicado determinar directamentela aplicación etA que indirectamente a partir de la obtención de todas las soluciones delsistema x′(t) = Ax(t). Por tanto, aparentemente es más competitivo el uso de métodos adhoc para resolver un sistema lineal de primer orden con matriz de coeficientes constante queel cálculo de la exponencial de dicha matriz, que sabemos proporciona siempre la función de
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La exponencial de una matriz 99
Green del sistema. Si la lectora o el lector aún no estuviera convencida/o de la veracidad dela anterior afirmación, será entonces instructivo que se plantee la solución del sistema lineal
x′(t) = Ax(t), donde A =
(a bb c
), con a, b, c ∈ R. Observar que en este caso la matriz A
diagonaliza, puesto que es simétrica, de manera podemos encontrar fácilmente una matrizfundamental en la forma (4.1), mientras que la obtención de etA resulta extremadamenteintrincada, excepto en el caso particular a = c en el que probablemente el cálculo de laexponencial sea más sencillo que diagonalizar la matriz. ¿Por qué?
4.2.1. Las Fórmulas de Rodrigues
La primera dificultad en el cálculo explícito de la exponencial de una matriz aparece enla dificultad de obtener una expresión de las potencias sucesivas de la matriz. No obstante,para solventar esta dificultad aún podríamos apoyarnos en resultados concoidos del álgebralineal. Concretamente, si A ∈ Mm(R) y p(x) = xm + am−1x
m−1 + · · · + a0 es su polinomiocaracterístico, el Teorema de Cayley-Hamilton establece la identidad matricial p(A) = 0, esdecir que
Am = −am−1Am−1 − · · · − a0I,
lo que implica que todas las potencias An con n ≥ m pueden obtenerse de manera recurrentea partir del conocimiento de las potencias An con n ≤ m− 1. En la práctica este resultadosigue siendo ineficaz excepto en ejemplos muy concretos que incluyen los casos m = 2, 3cuando A = −AT , que serán los que analizaremos a continuación.
Supongamos pues que A =
[0 a
−a 0
]con a ∈ R, cuyo polinomio característico es
p(x) = x2 + a2, lo que según el Teorema de Cayley-Hamilton implica que A2 = −a2I. Estaigualdad implica a su vez que A3 = −a2A y finalmente que A4 = −a2A2 = a4I. Procediendopor inducción, obtenemos fácilmente que para cada n ∈ N se verifica que
A2n = (−1)nI y que A2n+1 = (−1)na2nA = (−1)na2n+1K, donde K =
[0 1
−1 0
].
Por tanto, la exponencial de A se calcula fácilmente a partir de las igualdades
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

100 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
eA =∞∑
n=0
1
n!An =
∞∑n=0
1
2n!A2n +
∞∑n=0
1
(2n + 1)!A2n+1
= I
∞∑n=0
(−1)n a2n
2n!+ K
∞∑n=0
(−1)n a2n+1
(2n + 1)!= (cosa)I + (sen a)K =
[cosa sen a
− sen a cosa
].
Aplicando este resultado a las matrices tA cuando t ∈ R, obtenemos
Fórmula de Rodrigues
Dados a ∈ R y A =
[0 a
−a 0
], entonces etA =
[cos(at) sen(at)
− sen(at) cos(at)
], para cada t ∈ R.
Supongamos ahora que A =
0 a b−a 0 c−b −c 0
con a, b, c ∈ R, cuyo polinomio característico
es p(x) = −x3− θ2x, donde θ =√
a2 + b2 + c2. El Teorema de Cayley-Hamilton implica queA3 = −θ2A, igualdad que implica a su vez que A4 = −θ2A2. Procediendo por inducción,obtenemos fácilmente que para cada n ∈ N se verifica que
A2n = (−1)n−1θ2(n−1)A2, si n ≥ 1 y A2n+1 = (−1)nθ2nA si n ≥ 0.
Podemos suponer que θ > 0, pues si θ = 0, entonces a = b = c = 0 y por tanto A = 0,lo que implica que eA = I. Así pues, si θ > 0, la exponencial de A se calcula fácilmente apartir de las igualdades
eA = I +∞∑
n=1
1
n!An =
∞∑n=0
1
2n!A2n +
∞∑n=0
1
(2n + 1)!A2n+1
= I − 1
θ2A2
∞∑n=1
(−1)n θ2n
2n!+
1
θA
∞∑n=0
(−1)n θ2n+1
(2n + 1)!= I +
sen θ
θA +
(1− cosθ)
θ2A2.
Aplicando este resultado a las matrices tA cuando t ∈ R, obtenemos la versión másconocida del resultado que perseguimos en esta sección:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Cálculo de la exponencial de una matriz 101
Fórmula de Rodrigues
Dados a, b, c ∈ R, θ =√
a2 + b2 + c2 y A =
0 a b−a 0 c−b −c 0
, entonces
etA = I +sen(θt)
θA +
(1− cos(θt)
)
θ2A2 para cada t ∈ R.
4.3. Cálculo de la exponencial de una matriz
En los ejemplos considerados en la sección anterior, la dificultad para obtener directa-mente la exponencial de una matriz reside fundamentalmente en la falta de una expresiónsencilla para las potencias sucesivas de tal matriz, aunque naturalmente esto depende decada matriz considerada. Es obvio que cuantas más componentes nulas tenga una matriztanto más sencillo será el cálculo de sus potencias sucesivas. El caso más extremo es elde una matriz diagonal, que permite este cálculo de manera casi inmediata. De hecho, si
A =
λ1
. . .λm
, entonces An =
λn1
. . .λn
m
, para cada n ∈ N y por tanto,
etA =
∞∑n=0
(tλ1)n
n!
. . .∞∑
n=0
(tλm)n
n!
=
etλ1
. . .etλ1
.
Observar que en este caso, el cálculo de la exponencial es inmediato, pero que tambiénera inmediato resolver el sistema directamente, tal y como se efectuó en la Introducción deeste tema. Allí comprobamos también cuando la matriz de coeficientes del sistema no esdiagonal pero es diagonalizable, el sistema es equivalente a otro con matriz de coeficientesdiagonal y por tanto resolubre de manera inmediata. Comprobaremos a continuación que eneste caso el cálculo de la exponencial es también inmediato. Para ello nos basaremos en lasiguiente propiedad de comprobación inmediata:
Si P ∈ Mm(R) es no singular, entonces para cada A ∈ Mm(R)se tiene que
[PAP−1
]n= PAnP−1, para cada n ∈ N,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

102 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Por tanto, para cada k ∈ N y cada t ∈ Rk∑
n=0
tn
n!(PMP−1)n = P
[ k∑n=0
tn
n!Mn
]P−1 y en
definitiva
etPMP−1= PetMP−1, para cada t ∈ R. (4.17)
Si suponemos ahora que la matriz A diagonaliza, es decir existen P, D ∈ Mm(R) con P
no singular, D =
λ1
. . .λm
y tales que A = PDP−1, la identidad (4.17) anterior
permite concluir que
Si A ∈ Mm(R) diagonaliza y P, D ∈ Mm(R) son tales que P es invertible, Ddiagonal y A = PDP−1, entonces para cada t ∈ R se tiene que
etA = etPDP−1
= P
etλ1
. . .etλm
P−1, donde D =
λ1
. . .λm
,
(4.18)
resultado que coincide básicamente con la identidad (4.1), teniendo en cuenta que comoΦ(0) = P , etA = Φ(t)Φ−1(0).
En particular si A =
(1 03 2
)es la matriz considerada en el ejemplo de la sección
anterior, A tiene a λ1 = 1 y λ2 = 2 como autovalores, de manera que A diagonaliza en una
base de autovectores. Concretamente, si P =
(1 0
−3 1
), entonces P−1 =
(1 03 1
)y si
definimos D =
(1 00 2
), resulta que A = PDP−1. Teniendo en cuenta la identidad (4.18),
resulta que
etA = PetDP−1 =
(1 0
−3 1
) (et 00 e2t
)(1 03 1
)=
(et 0
3(e2t − et) e2t
).
Naturalmente, el resultado (4.18) no puede aplicarse a una matriz arbitraria A ∈Mm(R)con m > 1, pues es bien conocido que no toda matriz es diagonalizable. Sin embargo si admiteuna generalización en el siguiente sentido:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 103
Si A ∈Mm(R) diagonaliza por bloques, es decir existen P ∈Mm(R) y matricesAj ∈ Mmj
(R), 1 ≤ mj ≤ m, j = 1, . . . , r con m = m1 + · · · + mr, tales que P
es invertible y A = P
A1
. . .Ar
P−1, entonces para cada t ∈ R se tiene
que
etA = P
etA1
. . .etAm
P−1.
(4.19)
Observar que si la matriz ∈ Mm(R) diagonaliza, entonces podemos escoger r = m yAj = λj, para cada j = 1, . . . , m, de manera que efectivamente (4.19) s una generalizaciónde (4.18). Por otra parte, el resultado anterior tiene una utilidad de índole práctica, ya quepermite en muchos casos reducir el cálculo de la exponencial de una matriz de gran tamañoal de las exponenciales de matrices de menor orden, aunque su aplicabilidad se basará enque una matriz arbitraria pueda ser diagonalizada por bloques. No obstante, a la vista delos ejemplos de la sección anterior esta reducción puede aún ser ineficaz si las submatricesA1, . . . , Ar no tienen la estructura suficientemente sencilla como para que el cálculo de suexponencial sea viable. En definitiva, para cada matriz A ∈Mm(R), el cálculo de etA podrállevarse a cabo si tenemos garantía de que A es equivalente a una matriz para la cualla obtención de su exponencial sea viable, que según nuestra experiencia significa que laexpresión de la matriz equivalente tenga la mayor cantidad de ceros posible, o expresado deotra forma que el sistema lineal equivalente al sistema algebraico Az = b o al sistema de EDOx′(t) = Ax(t) sea lo más descoplado posible. Desde el punto de vista del Álgebra Lineal, estosignifica que si consideramos la aplicación lineal asociada a A ∈Mm(R), es decir aquella quetransforma el j-ésimo vector de la base canónica de Rm en el vector cuyas componetes endicha base son los elementos de la j-ésima columna de A, entonces nos planteamos encontraruna nueva base tal que la imagen por la aplicación lineal de cada uno de sus vectores tengael mayor número de componentes nulas en dicha base. Puede quizá resultar sorprendenteque un resultado como el pretendido, la búsqueda para cada matriz A ∈Mm(R) de una matrizequivalente cuya expresión sea lo más desacoplada posible, tenga contestación afirmativa, loque constituye uno de los teoremas más profundos del Álgebra Lineal, que naturalmentetiene multitud de aplicaciones.
Recordemos que si A ∈Mm(R) y p(x) es su polinomio característico, entonces la expre-sión de p en factores irreducibles es
p(x) =r∏
i=1
(x− λi)mi
s∏j=1
(x2 − 2ajx + a2j + b2
j)nj ,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

104 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
donde λ1, . . . , λr ∈ R y b1, . . . , bs 6= 0. Cuando p sólo tenga raíces complejas, en cuyo casonecesariamente m ha de ser par, tomaremos r = 0 en la expresión anterior, mientras quesi todas las raíces de p son reales, entonces tomaremos s = 0. En el ámbito del Álgebralineal, el conjunto σ(A) = {λ1, . . . , λr, a1 ± ib1, . . . , as ± ibs} se denomina espectro de A ysus elementos son los autovalores de A considerada como matriz de coeficientes complejos.Además mi y nj se denominan las multiplidades algebraicas de los autovalores λi y aj ± ibj
respectivamente, mientras que sus multiplidades geométricas están definidas como los númerosdi = dim ker [A−λiI] y dj = dim ker [A−(aj± ibj)I], respectivamente. Observar que siempre
se satisface que m =r∑
i=1
mi+2s∑
j=1
nj. Por otra parte, de los cursos de Álbebra lineal sabemos
que 1 ≤ di ≤ mi, 1 ≤ dj ≤ nj y que la matriz no diagonaliza respecto del autovalor λi,respectivamente respecto de aj + ibj si y sólo si di < mi, respectivamente dj < nj, es decir siA diagonaliza respecto a un autovalor, real o complejo, si y sólo si la multiplidad geométricay la algebraica de ese autovalor coinciden.
Forma Canónica de Jordan
Sean A ∈ Mm(R) y σ(A) = {λ1, . . . , λr, a1 ± ib1, . . . , as ± ibs}, donde λi ∈ R,i = 1, . . . , r y bj 6= 0, j = 1, . . . , s todas las raíces, reales y complejas, del polinomiocaracterístico de A, con multiplicidades m1, . . . , mr y n1, . . . , ns, respectivamente. Sidi = dim ker [A−λiI], i = 1, . . . , r y dj = dim ker [A− (aj± ibj)I], j = 1, . . . , s, en-tonces existen P ∈Mm(R) no singular, Ji ∈Mmi
(R), i = 1, . . . , r y Lj ∈M2nj(R),
j = 1, . . . , s, tales que A = PJP−1, donde J es la matriz diagonal por bloques queestá constituida por los r + s bloques J1, . . . , Jr, L1, . . . , Ls.
Además, para cada i = 1, . . . , r, Ji es diagonal por bloques, consta de di blo-
ques y cada uno de ellos es de la forma Jil =
λi
1 λi
. . . . . .1 λi
, l = 1, . . . , di,
mientras que para cada, j = 1, . . . , s, Lj es diagonal por bloques, consta de dj bloques
y cada uno de ellos es de la forma Ljl =
Cj
I. . .. . . Cj
I Cj
, l = 1, . . . , dj, con
Cj =
(aj bj
−bj aj
)e I =
(1 00 1
).
Para una demostración del resultado anterior, pueden consultarse [?] y especialmente [?].
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 105
Con las notaciones utilizadas en el resultado anterior,
la matriz J se denomina forma canónica de Jordan de A, mientras que la base deRm formada los vectores cuyas coordenadas en la base canónica están dadas porlas columnas de P se denomina base de Jordan de Rm determinada por A.
(4.20)
En el resultado anterior no se excluye que o bien s = 0 o bien r = 0. En el primer casosólo tendrán sentido los bloques de la forma Ji, mientras que en el segundo sólo lo tendránlos bloques del tipo Lj. Recordar que cuando r = 0, entonces todas las raíces del polinomiocaracterístico de A son complejas lo que implica que el orden de la matriz, es decir m, debeser par.
Caracterización de la Base de Jordan
Sean A ∈Mm(R), F : Rm −→ Rm la aplicación lineal descrita por A, es decir F (x) = Axpara cada x ∈ Rm y B la base de Jordan determinada por A, es decir
B ={{u1n}m1
n=1, . . . , {urn}mrn=1, {v1n, w1n}n1
n=1, . . . , {vsn, wsn}nsn=1
}.
Si para cada i = 1, . . . , r consideremos ki0 = 0 y para cada l = 1, . . . , di, kil el orden delbloque Jil correspondiente a λi, entonces ki1 + · · ·+ kidi
= m1 y además
F (uin) = λiuin + uin+1, sil−1∑z=0
kil < n <l∑
z=0
kil, l = 1, . . . , di,
F (uin) = λiuin, si n =l∑
z=0
kil, l = 1, . . . , di.
Si para cada j = 1, . . . , s consideremos kj0 = 0 y para cada l = 1, . . . , di, 2kjl el orden delbloque Ljl correspondiente a aj ± i bjλi, entonces kj1 + · · ·+ kjdj
= 2nj y además
F (vjn) = ajvjn − bjwjn + vjn+1, sil−1∑z=0
kjl < n <l∑
z=0
kjl, l = 1, . . . , di,
F (wjn) = bjvjn + ajwjn + wjn+1, sil−1∑z=0
kjl < n <l∑
z=0
kjl, l = 1, . . . , di,
F (vjn) = ajvjn − bjwjn, si n =l∑
z=0
kil, l = 1, . . . , di,
F (wjn) = bjvjn + ajwjn, si n =l∑
z=0
kil, l = 1, . . . , di.
Observar que para cada i = 1, . . . , r y cada l = 1, . . . , di de entre los vectores de la base
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

106 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
de Jordan que corresponden al bloque de Jordan Jil, es decir {uin}βiln=αil+1 donde αil =
l−1∑z=0
kil
y βil =l∑
z=0
kil, uβiles el único autovector correspondiente al autovalor λi.
Análogamente, para cada j = 1, . . . , s y cada l = 1, . . . , di de entre los vectores l de labase de Jordan que corresponden al bloque de Jordan Ljl, es decir {vjn, wjn}βjl
n=αjl+1 donde
αjl =l−1∑z=0
kil y βjl =l∑
z=0
kil, vβjl+ iwβjl
es el único autovector complejo correspondiente al
autovalor a+i bj, mientras que vβjl− iwβjl
es el único autovector complejo correspondiente alautovalor aj − i bj.
En general, la forma canónica de Jordan de una matriz representa la matriz equivalente aella más desacoplada posible, o en otras palabras la forma más desacoplada de expresar laaplicación lineal determinada por tal matriz. En particular, si A es diagonalizable, entoncessu forma canónica de Jordan, J , es una matriz diagonal. Por otra parte, si A es triangulable,entonces todas las raíces del polinomio característico de A son reales, lo que implica que s = 0,de manera que la forma canónica de Jordan de A es su forma triangular más desacopladaposible.
Ahora, la posibilidad de calcular etA queda reducida a la posibilidad de calcular etJil ,i = 1, . . . , r y etLjl , j = 1, . . . , s.
Consideremos pues la matriz J ∈Mk(R) dada por J =
λ1 λ
. . . . . .1 λ
. Claramente
J = λ I + N , donde I es la matriz identidad de order k y N =
01 0
. . . . . .1 0
. Como
λ I y N conmutan, la propiedad (iii) de (4.11) implica que
etJ = etλ IetN = etλetN , t ∈ R,
ya que como tλ I es diagonal, entonces etλ I =
etλ
. . .etλ
= etλI. Por otra parte, es
fácil verificar que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 107
N2 =
00 01 0 0...
. . . . . . . . .0 · · · 1 0 0
, . . . , Nk−1 =
00 0... . . . . . .1 · · · 0 0
y Nk = 0,
lo que implica que
etN =∞∑
n=0
tn
n!Nn = I + tN +
t2
2N2 + · · ·+ tk−1
(k − 1)!Nk−1 =
1t 1t2
2t 1
... . . . . . . . . .tk−1
(k−1)!· · · t2
2t 1
.
En definitiva, hemos demostrado que
Si J =
λ1 λ
. . . . . .1 λ
∈Mk(R), entonces
etJ = etλ
1t 1t2
2t 1
... . . . . . . . . .tk−1
(k−1)!· · · t2
2t 1
, t ∈ R.
(4.21)
Consideremos ahora la matriz L ∈ M2k(R) dada por L =
CI C
. . . . . .I C
, donde
C =
(a b−b a
)e I =
(1 00 1
). Es claro que L = D + N donde D, N ∈ M2k(R) están
definidas como D =
C. . .
C
y N =
0I 0
. . . . . .I 0
y = es la matriz nula de
orden 2. Como D y N conmutan, la propiedad (iii) de (4.11) implica nuevamente que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

108 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
etL = etDetN =
etC
. . .etC
etN , t ∈ R.
Nuevamente, es sencillo verificar que
N2 =
00 0I 0 0...
. . . . . . . . .0 · · · I 0 0
, . . . , Nk−1 =
00 0... . . . . . .I · · · 0 0
y Nk = 0,
lo que implica que
etN = I + tN +t2
2N2 + · · ·+ tk−1
(k − 1)!Nk−1 =
ItI It2
2I tI I... . . . . . . . . .
tk−1
(k−1)!I · · · t2
2I tI I
y por tanto,
etL = etDetN =
etC
tetC etC
t2
2etC tetC etC
... . . . . . . . . .tk−1
(k−1)!etC · · · t2
2etC tetC etC
. (4.22)
En conclusión, para concluir el cálculo de etL es necesario determinar etC .
Como C =
(a b−b a
), resulta inmediato comprobar que C = aI + bK, donde I es la
identidad de orden 2 y K =
(0 1−1 0
), y es claro que ambas matrices conmutan, por lo
que
etC = etaIetbK = etaetbK = eta
[cos(bt) sen(bt)
− sen(bt) cos(bt)
], t ∈ R,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 109
donde hemos tenido en cuenta que etaI = etaI y la Fórmula de Rodrigues para matricesantisimétricas de orden 2. Teniendo en cuenta la identidad (4.22), hemos demostrado que
Si L =
CI C
. . . . . .I C
∈M2k(R) con C =
(a b−b a
)e I =
(1 00 1
),
entonces para cada t ∈ R se satisface que
etL = eta
E(t)tE(t) B(t)
t2
2 E(t) tE(t) E(t)...
. . . . . . . . .tk−1
(k−1)! E(t) · · · t2
2 E(t) tE(t) E(t)
, E(t) =(
sen(tb) cos(tb)− sen(tb) cos(tb)
).
(4.23)
En conclusión, el resultado buscado es el siguiente:
Expresión de la exponencial de una matriz
Sean A ∈ Mm(R) y σ(A) = {λ1, . . . , λr, a1 ± ib1, . . . , as ± ibs} todas las raíces, reales ycomplejas, del polinomio característico de A, con multiplicidades algebraicas m1, . . . , mr
y n1, . . . , ns, y multiplicidades geométricas d1, . . . , dr y d1, . . . , ds, respectivamente.Consideremos J la forma canónica de Jordan de A, J1, . . . , Jr, L1, . . . , Ls los bloques deJordan y P ∈Mm(R) no singular no singular tal que A = PJP−1.
Entonces, etA = P
etJ1
. . .etJr
etL1
. . .etLs
P−1 donde para cada i = 1, . . . , r,
etJil = etλi
1t 1t2
2 t 1...
. . . . . . . . .tk−1
(k−1)! · · · t2
2 t 1
, mientras que para cada j = 1, . . . , s,
etLjl = etaj
Ej(t)tEj(t) Ej(t)
t2
2 Ej(t) tEj(t) Ej(t)...
. . . . . . . . .tk−1
(k−1)! Ej(t) · · · t2
2 Ej(t) tEj(t) Ej(t)
, E(t) =(
sen(tbj) cos(tbj)− sen(tbj) cos(tbj)
).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

110 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
El resultado anterior, muestra que conocida J , la forma canónica de Jordan de A, ladeterminación de etJ es directa y no requiere efectuar ningún cálculo adicional. Para com-pletar el cálculo de la exponencial de la matriz original, es preciso determinar la base deJordan correspondiente, es decir la matriz P y también la inversa de P . Por lo que respectaal cálculo de P , éste se realiza simultáneamente al de la forma canónica, mientras que enla práctica la evaluación de P−1 es la etapa del proceso que involucra un mayor número deoperaciones.
Como veremos, podemos evitar esta última etapa del proceso, es decir el cálculo de P−1,si renunciamos a determinar la única matriz fundamental que en t = 0 toma como valor laidentidad, es decir etA y nos contentamos con determinar una matriz fundamental, es deciruna base de soluciones, sin la propiedad anterior. Para ello, observemos que con las notacionesanteriores, como etA es una matriz fundamental del sistema lineal x′(t) = Ax(t) y P es nosingular, entonces la aplicación matricial Φ(t) = etAP = PetJ es también fundamental y estaaplicación puede determinarse directamente a partir del conocimiento de J y de P .
Base de soluciones del sistema x′(t) = Ax(t)
Sean A ∈ Mm(R) y B ={{u1n}m1
n=1, . . . , {urn}mrn=1, {v1n, w1n}n1
n=1, . . . , {vsn, wsn}nsn=1
}la
base de Jordan determinada por A.
Para cada i = 1, . . . , r, consideremos ki0 = 0 y para cada l = 1, . . . , di, kil el or-
den del bloque Jil correspondiente a λi, αil =l−1∑z=0
kil y βil =l∑
z=0
kil, mientras que para cada
j = 1, . . . , s, consideremos kj0 = 0 y para cada l = 1, . . . , di, 2kjl el orden del bloque Ljl
correspondiente a aj ± i bj, αil =l−1∑z=0
kil y βil =l∑
z=0
kil.
Entonces, las funciones definidas como
xin(t) = etλi
[uin + tuin+1 + · · ·+ tβil−n
(βil − n)!uiβil
],
si i = 1, . . . , r, l = 1, . . . , di y αil < n ≤ βil y como
yjn(t) = etaj
[cos(tbj)vjn − sen(tbj)wjn + · · ·+ tβjl−n
(βjl − n)!
(cos(tbj)vjβjl
− sen(tbj)wjβjl
)],
zjn(t) = etaj
[sen(tbj)vjn + cos(tbj)wjn + · · ·+ tβjl−n
(βjl − n)!
(sen(tbj)vjβjl
+ cos(tbj)wjβjl
)],
si j = 1, . . . , s, l = 1, . . . , di y αil < n ≤ βil es una base de soluciones de x′(t) = Ax(t).
Observar que para cada i = 1, . . . , r y cada l = 1, . . . , di y para cada j = 1, . . . , s y cada
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Estabilidad de los sistemas de coeficientes constantes 111
l = 1, . . . , dj las expresiones anteriores determinan las funciones
xiβil(t) = etλiuiβil
,
yjn(t) = etaj[cos(tbj)vjβjl
− sen(tbj)wjβjl
],
zjn(t) = etaj[sen(tbj)vjβjl
+ cos(tbj)wjβjl
].
que ya fueron obtenidas en la identidad (4.4) de la primera sección de este Tema.
4.4. Estabilidad de los sistemas de coeficientes constantes
Teniendo en cuenta que etA es una matriz fundamental del sistema x′(t) = Ax(t), deacuerdo con las nociones y los resultados de la Sección 3.5 y más concretamente de acuerdocon (3.34), la determinación de estabilidad, estabilidad asintótica o inestabilidad de las solu-ciones de los sistemas x′(t) = Ax(t) + f(t), o equivalentemente, la estabilidad, estabilidadasintótica o inestabilidad de la matriz A, se reduce a comprobar cuándo fijado t0, todas lascomponentes de etA son funciones acotadas para t ≥ t0, tienden a 0 cuando t → +∞, oalguna de las componentes es una función no acotada, respectivamente.
Supongamos pues que A ∈Mm(R) y que P y J son respectivamente una base de Jordan ysu forma canónica Jordan. Entonces para cada t ∈ I, se tiene que etA = PetJP−1, de maneraque las componentes de etA están acotadas para t ≥ t0 o tienden a 0 cuando t → +∞ si ysólo si las componentes de etJ tienen el mismo comportamiento. En definitiva, concluimosque
una matriz cuadrada es estable, asintóticamente estable o inestable si y sólo sisu forma canónica de Jordan es estable, asintóticamente estable o inestable,respectivamente.
(4.24)
Recordemos que si A ∈Mm(R) y σ(A) = {λ1, . . . , λr, a1±ib1, . . . , as±ibs}, donde λi ∈ R,i = 1, . . . , r y bj 6= 0, j = 1, . . . , s tienen multiplicidades algebraicas m1, . . . ,mr y n1, . . . , ns
y multiplicidades geométricas d1, . . . , dr y d1, . . . , ds, respectivamente, entonces
etJ =
etJ1
. . .etJr
etL1
. . .etLs
,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

112 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
donde
etJj =
etJj1
. . .etJjdj
∈Mmj
(R), etLk =
etLj1
. . .e
tLkdk
∈M2nk
(R)
para j = 1, . . . , r y k = 1, . . . , s.
A la vista de las identidades anteriores, resulta que J es estable o asintóticamente establesi y sólo si todas las matrices {Jjk}dj
k=1, j = 1, . . . , r y {Ljk}dj
k=1, j = 1, . . . , s son estables oasintóticamente estables, respectivamente. Por otra parte, si alguna de las matrices anterioreses inestable, entonces J también lo será. Además, fijado t0 ∈ R, la estabilidad o estabilidadasintótica de cualquiera de las matrices anteriores es equivalente a que todas sus componentesestán acotadas para t ≥ t0 o tiendan a 0 cuando t → +∞, respectivamente, mientras que lainestabilidad es equivalente a que alguna de sus componentes no sea acotada para t ≥ t0.
Fijemos t0 ∈ R y consideremos j = 1, . . . , r y k = 1 . . . , mj. Entonces,
etJjk = etλj
1t 1t2
2t 1
... . . . . . . . . .tk−1
(k−1)!· · · t2
2t 1
,
de manera que si λj > 0, entonces las componentes diagonales de etJjk son no acotadas. Porotra parte, si λj < 0, entonces es claro que lım
t→+∞etJjk = 0. Finalmente si λj = 0, entonces la
única posibilidad para que etJjk tenga componentes acotadas para t ≥ t0 es que se reduzcaa la diagonal, y por tanto Jjk debe ser una matriz de orden 1.
Si ahora, fijado t0 consideramos j = 1, . . . , s y k = 1 . . . , nj, entonces,
etLjk = etaj
Ej(t)tEj(t) Ej(t)t2
2Ej(t) tEj(t) Ej(t)... . . . . . . . . .
tk−1
(k−1)!Ej(t) · · · t2
2Ej(t) tEj(t) Ej(t)
,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 113
donde E(t) =
(cos(tbj) sen(tbj)
− sen(tbj) cos(tbj)
).
Nuevamente, si aj > 0, entonces las componentes diagonales de etLjk son no acotadas. Porotra parte, si aj < 0, entonces es claro que lım
t→+∞etLjk = 0 y finalmente si aj = 0, entonces la
única posibilidad para que etLjk tenga componentes acotadas para t ≥ t0 es que se reduzcaal bloque diagonal, y por tanto Ljk debe ser una matriz de orden 2.
Recapitulando los resultados obtenidos, tenemos las siguientes conclusiones:
• La matriz A ∈Mm(R) es asintóticamente estable si y sólo si la parte real detodas las raíces de su polinomio característico son estrictamente negativas.
• La matriz A ∈Mm(R) es estable si y sólo si la parte real de todas las raícesde su polinomio característico son negativas y la multiplicidad geométrica decada raíz con parte real nula coincide con su multiplicidad algebraica.
• La matriz A ∈ Mm(R) es inestable si y sólo si su polinomio característicotiene o bien una raíz con parte real estrictamente positiva o bien una raíz conparte real nula cuya multiplicidad geométrica es estrictamente menor que laalgebraica.
(4.25)
Como acabamos de comprobar el signo de la parte real de las raíces del polinomio caracte-rístico proporciona una información que en muchos casos puede ser suficiente para determinarla inestabilidad, la estabilidad asintótica e incluso la estabilidad. Sin embargo, la aplicacióndel criterio anterior pasa precisamente por calcular las raíces de dicho polinomio, tarea quepuede resultar de enorme dificultad si el orden de la matriz es suficientemente alto. Noobstante el simple análisis del polinomio característico permite obtener un criterio negativotanto de estabilidad como de estabilidad asintótica que puede resultar de gran utilidad enlas aplicaciones. Supongamos que p(x) = det (xI − A) = xm + c1x
m−1 + · · ·+ cm. Como
p(x) =r∏
j=1
(x− λj)mj
s∏j=1
(x2 − 2ajx + a2j + b2
j)nj , bj 6= 0, j = 1, . . . , s
resulta que si A es estable, entonces −λj ≥ 0, j = 1, . . . , r y −aj ≥ 0, j = 1, . . . , s,de manera que necesariamente c1, . . . , cm ≥ 0, mientras que cuando A es asintóticamenteestable, el mismo razonamiento muestra que c1, . . . , cm > 0. En definitiva hemos demostradoel siguiente criterio:
Consideremos A ∈Mm(R) y p(x) = det (xI −A) = xm + a1xm−1 + · · ·+ am. Si
existe j = 1, . . . , m tal que aj < 0, entonces A es inestable y si existe j = 1, . . . , mtal que aj = 0, entonces A no puede ser asintóticamente estable.
(4.26)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

114 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
4.5. Sistemas de coeficientes variables
Después de analizada la solución efectiva de los sistemas lineales con coeficientes cons-tantes, surge de forma natural la pregunta de si los desarrollos anteriores son válidos parael caso de sistemas lineales generales. Concretamente, nos preguntamos si dada la aplicación
matricial continua A : I −→Mm(R), entonces Φ(t) = e
∫ t
t0
A(s) dses una matriz fundamen-
tal del sistema x′(t) = A(t)x(t). Naturalmente cuando esto ocurra, entonces Φ es la únicamatriz fundamental tal que Φ(t0) = Id. Por ejemplo, esto es cierto en el caso escalar, esdecir cuando m = 1. Más generalmente, si existen una función continua h : I −→ R y unamatriz A ∈ Mm(R) tales que A(t) = h(t)A, para cada t ∈ R, entonces la misma técnica
que la utilizada en el caso de coeficientes constantes muestra que Φ(t) = e
(∫ t
t0
h(s) ds
)A
es matriz fundamental del sistema x′(t) = A(t)x(t). De hecho, el caso de coeficientes cons-tantes analizado en la sección anterior corresponde a tomar h = 1. Observar que en esta
situación la determinación explícita de e
(∫ t
t0
h(s) ds
)A
depende fundamentalmente de laforma canónica de Jordan de A, y de hecho basta sustituir en la expresión de etA la función
t por∫ t
t0
h(s) ds. En particular, resulta que si Φ(t) = e
(∫ t
t0
h(s) ds
)A, entonces Φ ∈ C1(I)
y además Φ′(t) = h(t)Ae
(∫ t
t0
h(s) ds
)A, para cada t ∈ I.
A la vista del resultado anterior parece plausible concluir que si A : I −→ Mm(R) es
continua, entonces Φ(t) = e
∫ t
t0
A(s) dses derivable y además Φ′(t) = A(t)e
∫ t
t0
A(s) ds. El
siguiente ejemplo muestra que, en general, el resultado anterior es falso:
Consideremos A : R −→M2(R) dada por A(t) =
[1 02t 0
], para cada t ∈ R. Entonces,
∫ t
t0
A(s) ds =
[t− t0 0t2 − t20 0
]y por tanto
(∫ t
t0
A(s) ds
)n
= (t− t0)n
[1 0
t + t0 0
], para cada
n ∈ N∗ y en definitiva,
Φ(t) = e
∫ t
t0
A(s) ds=
[et−t0 0
(t + t0)(et−t0 − 1) 1
],
mientras que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 115
Φ′(t) =
[et−t0 0
et−t0(t + t0 + 1)− 1 0
]6= A(t)Φ(t) =
[et−t0 0
2tet−t0 0
].
La razón de que Φ(t) = e
∫ t
t0
A(s) dsno defina en general una matriz fundamental del
sistema x′(t) = A(tx(t) reside nuevamente en la no conmutatividad del producto de matrices.
De hecho, si definimos B(t) =
∫ t
t0
A(s) ds y suponemos que A(t)B(t) = B(t)A(t) para cada
t ∈ I, entonces(B(t)n
)′= nA(t)
(B(t)
)n−1, lo que implica que
(eB(t)
)′=
∞∑n=0
(B(t)n
n!
)′=
∞∑n=1
A(t)B(t)n−1
(n− 1)!= A(t)eB(t).
y en definitiva
si existe t0 ∈ I tal que la aplicación matricial continua A : I −→Mm(R) satis-
face que A(t)
(∫ t
t0
A(s) ds
)=
(∫ t
t0
A(s) ds
)A(t) para cada t ∈ I, entonces,
Φ(t) = e
∫ t
t0
A(s) dses matriz fundamental del sistema x′(t) = A(t)x(t)
(4.27)
En el ejemplo analizado anteriormente la condición de que A conmute con su primitivaque se anula en t0, no se satisface para ningún t0 ∈ I ya que
A(t)
(∫ t
t0
A(s) ds
)=
[t− t0 0
2t(t− t0) 0
]6=
[t− t0 0t2 − t20 0
]=
(∫ t
t0
A(s) ds
)A(t).
Una condición sencilla que asegura que A(t)
(∫ t
t0
A(s) ds
)=
(∫ t
t0
A(s) ds
)A(t) para
cada t0 ∈ I y cada t ∈ I, es que se verifique que A(s)A(t) = A(t)A(s) para cada t, s ∈ I, yaque si esta condición se satisface, entonces fijado t ∈ I, resulta que
A(t)
(∫ t
t0
A(s) ds
)=
∫ t
t0
A(t)A(s) ds =
∫ t
t0
A(s)A(t) ds =
(∫ t
t0
A(s) ds
)A(t)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

116 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Además, si se satisface la propiedad de conmutación entre las matrices coeficientes, en-tonces también se verifica que
(∫ t
t0
A(τ) dτ
)(∫ s
t0
A(u) du
)=
∫ t
t0
∫ s
t0
A(τ)A(u) dτ du
=
∫ s
t0
∫ t
t0
A(u)A(τ) du dτ
(∫ s
t0
A(u) du
) (∫ t
t0
A(τ) dτ
).
En definitiva, teniendo presentes las propiedades (4.11) de la exponencial de una matrizy también la fórmula de Lagrange-Green obtenemos que
si A : I −→ Mm(R) satisface que A(t)A(s) = A(s)A(t), t, s ∈ I entonces, lafunción de Green del sistema x′(t) = A(t)x(t) está determinada por la identidad
G(t, s) = e
∫ t
s
A(τ) dτ, t, s ∈ I.
Por tanto, para cada función continua f : I −→ Rm, cada t0 ∈ I y cada x0 ∈ Rm,la única solución del problema de valores iniciales x′(t) = Ax(t)+f(t), x(t0) = x0
está dada por la expresión
x(t) = e
∫ t
t0
A(τ) dτx0 +
∫ t
t0
e−
∫ s
t0
A(τ) dτf(s) ds
.
(4.28)
A pesar de que el resultado anterior describe las soluciones de un sistema lineal de EDOcon matriz de coeficientes no necesariamente constantes, sino verificando una propiedad deconmutación, el cálculo efectivo de tales soluciones aún no está asegurado puesto que paradeterminar una matriz fundamental es preciso hallar la exponencial de una cantidad infinitade matrices. No obstante, comprobaremos que la propiedad de conmutación de la matriz decoeficientes, es decir que se satisfaga que A(t)A(s) = A(s)A(t), para cada t, s ∈ I, permitereducir la situación al cálculo de una cantidad finita de exponenciales. Para ello recurriremosuna vez más a técnicas propias del Álgebra Lineal:
Fijaremos previamente un producto interno en el espacio vectorial Mm(R), por ejemplo〈B,C〉 = tr CT B y consideremos V = sg{A(t) : t ∈ I}, es decir el subespacio de Mm(R) ge-nerado por las matrices coeficientes. Es claro que si A : I −→Mm(R) no es la aplicación nula,entonces V no se reduce a la matriz nula y por tanto 1 ≤ k = dimV ≤ m2 = dimMm(R), loque implica que existen A1, . . . , Ak ∈ V tales que {A1, . . . , Ak} es base ortonormal de V .
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 117
Para cada t ∈ I, como A(t) ∈ V , resulta que A(t) = h1(t)A1 + · · · + hk(t)Ak, dondehj(t) = 〈A(t), Aj〉 para cada j = 1, . . . , k. Como A : I −→Mm(R) es continua, las funcioneshj : I −→ R, j = 1, . . . , k son también continuas. Por tanto, si para cada t0 ∈ I y cada
j = 1, . . . , k consideramos la función Hj(t) =
∫ t
t0
hj(s) ds, entonces satisface que
∫ t
t0
A(s) ds = H1(t)A1 + · · ·+ Hk(t)Ak, para cada t ∈ I.
Finalmente, como cualquier matriz del subespacio V es combinación lineal de matricesque conmutan entre sí, si B,C ∈ V entonces BC = CB, lo que implica que las matricesA1, . . . , Ak conmutan entre sí y por tanto,
e
∫ t
t0
A(s) ds= e
(∫ t
t0
h1(s) ds
)A1
· · · e
(∫ t
t0
hn(s) ds
)Ak
, para cada t ∈ I,(4.29)
de manera que el cálculo de e
∫ t
t0
A(s) dsse reduce a cálculo de las k exponenciales eHj(t)Aj ,
j = 1, . . . , k, cada una de las cuales depende de la forma canónica de Jordan de la matrizAj correspondiente.
4.5.1. Aplicación al Teorema Fundamental de Curvas Planas
Recordemos que, según el desarrollo efectuado en la Sección 3.4.1, el Teorema Fundamentalde Curvas Planas establece que
Si k : I −→ R es continua, definimos A(s) =
[0 k(s)
−k(s) 0
], fijamos s0 ∈ I
y consideramos Φ la única matriz fundamental del sistema x′(s) = A(s)x(s) que
satisface Φ(s0) = Id y t la primera fila de Φ, entonces la función c(s) =
∫ s
s0
t(u) du,
s ∈ I, es una curva parametrizada por arco cuya curvatura es k. Además, cualquierotra curva regular con estas propiedades tiene la expresión c(s) = Mc(s) + v, paracada s ∈ I, donde M ∈M2(R) es tal que MT M = Id y det M = 1 y v ∈ R2.
Es fácil comprobar que A(t)A(s) = A(s)A(t) para cada s, t ∈ I y por tanto si considera-
mos K(s) =
∫ s
s0
k(u) du y H =
[0 1
−1 0
], entonces
∫ s
s0
A(u) du = K(s)H y Φ(s) = eH(s)H
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

118 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
es matriz fundamental del sistema x′(s) = A(s)x(s). Como además K(s)H es una matrizantisimétrica de segundo orden, podemos aplicar la Fórmula de Rodrigues correspondientea este caso para concluir que
Φ(s) =
[cos
(K(s)
)sen
(K(s)
)
− sen(K(s)
)cos
(K(s)
)]
y por tanto
c(s) =
(∫ s
s0
cos(K(u)
)du,
∫ s
s0
sen(K(u)
)du
)T
.
Por otra parte, M =
[m11 m12
m21 m22
]satisface la identidad MT M = Id si y sólo si se verifica
que m211+m2
21 = m212+m2
22 = 1 y m11m12+m21m22 = 0. La última identidad implica que exis-te λ ∈ R tal que m12 = λm21 y m22 = −λm11 y como 1 = m2
12 + m222 = λ2(m2
21 + m211) = λ2,
resulta que λ = ±1 y o bien M =
[m11 m21
m21 −m11
]o bien M =
[m11 −m21
m21 m11
], pero sólo la
segundamatriz tiene determinante igual a 1. Así pues M ∈M2(R) satisface que MT M = Id
y detM = 1 si y sólo si M =
[m11 −m21
m21 m11
], donde m2
11 + m222 = 1. Si esto ocurre, existe
un único ϕ ∈ [0, 2π) tal que m11 = cosϕ y m21 = sen ϕ, es decir,
M ∈ M2(R) satisface que MT M = Id y detM = 1 si y sólo
si M =
[cosϕ − sen ϕsen ϕ cosϕ
], donde ϕ ∈ [0, 2π), es decir M es la
matriz de un giro de ϕ radianes efectuado en sentido antihorario.
Resulta entonces que
[cosϕ − sen ϕsen ϕ cosϕ
]c(s) =
∫ s
s0
[cosϕcos
(K(u)
)− sen sen(K(u)
)]du
∫ s
s0
[sen ϕcos
(K(u)
)+ cosϕ sen
(K(u)
)]du
=
∫ s
s0
cos(K(u) + ϕ
)du
∫ s
s0
[sen
(K(u) + ϕ
)du
,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Cálculo de la exponencial de una matriz 119
y tenemos la versión definitiva del Teorema Fundamental de curvas planas:
Sean I ⊂ R un intervalo no trivial y k : I −→ R una función continua. En-
tonces, fijado s0 ∈ I, si K(u) =
∫ u
s0
k(τ) dτ , todas las curvas planas regulares
parametrizadas por arco que tienen a k como curvatura están determinadas por laidentidad
c(s) =
(v1 +
∫ s
s0
cos(ϕ + K(u)
)du, v2 +
∫ s
s0
sen(ϕ + K(u)
)du
), s ∈ I,
donde ϕ ∈ [0, 2π) y v1, v2 ∈ R.
(4.30)
4.5.2. Aplicación al Teorema Fundamental de Curvas Espaciales
Recordemos que, según el desarrollo efectuado en la Sección 3.4.1, el Teorema Fundamentalde Curvas Planas establece que
Si k, τ : I −→ R son continuas y además k(s) > 0 para cada s ∈ I, definimos
A(s) =
0 k(s) 0−k(s) 0 −τ(s)
0 τ(s) 0
, fijamos s0 ∈ I y consideramos Φ la única matriz
fundamental del sistema x′(s) = A(s)x(s) que satisface Φ(s0) = Id y t la primera
fila de Φ, entonces la función c(s) =
∫ s
s0
t(u) du, s ∈ I, es una curva parametrizada
por arco cuyas curvatura y torsión son k y τ , respectivamente. Además, cualquierotra curva regular con estas propiedades tiene la expresión c(s) = Mc(s) + v, paracada s ∈ I, donde M ∈M3(R) es tal que MT M = Id y det M = 1 y v ∈ R3.
Para poder determinar explícitamente curvas regulares con curvatura y torsión dadas, espreciso encontrar una matriz fundamental del sistema x′(s) = A(s)x(s), pero para ello sabe-mos que es preciso exigir propiedades adicionales a la matriz de coeficientes, concretamenteque se satisfaga la propiedad de conmutación A(t)A(s) = A(s)A(t) para cada t, s ∈ I. Como
A(t)A(s) = −
k(t)k(s) 0 k(t)τ(s)0 k(t)τ(s) + k(s)τ(t) 0
τ(t)k(s) 0 τ(t)τ(s)
,
resulta que A(t)A(s) = A(s)A(t) para cada t, s ∈ I si y sólo si k(t)τ(s) = k(s)τ(t) paracada t, s ∈ I. En particular, si se satisface la anterior propiedad y fijamos s0 ∈ I, entonces
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

120 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
k(t)τ(s0) = k(s0)τ(t) para cada t ∈ I y como k(s0) > 0, la anterior identidad es equivalente
a que τ(t) = a k(t) para cada t ∈ I, donde a =τ(s0)
k(s0). Recíprocamente si τ(t) = a k(t) para
cada t ∈ I, entonces k(t)τ(s) = k(s)τ(t) para cada t, s ∈ I. En definitiva, hemos demostradoque
Si A(s) es la matriz de Frenet de una curva regular parametrizada por arcoc, entonces A(t)A(s) = A(s)A(t) para cada t, s ∈ I si y sólo si existe a ∈ Rtal que τ(t) = ak(t) para cada t ∈ I, es decir la torsión es un múltiplo de lacurvatura. Las curvas que satisfacen esta propiedad se denominan hélices.
Sean ahora a ∈ R, k : I −→ R continua y tal que k(s) > 0 para cada s ∈ I y consi-
deremos la aplicación matricial A(s) = k(s)
0 1 0−1 0 −a
0 a 0
. Si fijamos s0 ∈ I y tomamos
θ =√
1 + a2 y K(s) =
∫ s
s0
k(u) du, entonces aplicando la Fórmula de Rodrigues para matrices
antisimétricas de orden 3, la aplicación fundamental del sistema x′(s) = A(s)x(s) cuyo valoren s0 es la matriz identidad es
Φ(t) =
1 0 00 1 00 0 1
+
sen(θ K(s)
)
θ
0 1 0−1 0 −a
0 a 0
−
[1− cos
(θ K(s)
)]
θ2
1 0 a0 θ 0a 0 a2
y por tanto una hélice cuya curvatura es k y cuya torsión es τ = ak está dada por
c(s) =1θ2
(a2(s− s0) +
∫ s
s0
cos(θK(u)
)du, θ
∫ s
s0
sen(θK(u)
)du, a
∫ s
s0
cos(θK(u)
)du− a(s− s0)
)T
.
Si consideramos ahora la matriz M =1
θ
1 0 a0 θ 0a 0 −1
, entonces MT M = Id, detM = 1
y además
Mc(s) =1
θ
(∫ s
s0
cos(θK(u)
)du,
∫ s
s0
sen(θK(u)
)du, a(s− s0)
)T
. (4.31)
que es la expresión habitual para una hélice de curvatura k y torsión τ = ak.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 121
4.6. Ejercicios
Problema 1. Determinar todas las funciones x, y : R −→ R de clase C1(R) que, en cadacaso, satisfacen las identidades que se indican.
i) x′(t) = x(t), y′(t) = y(t).
ii) x′(t) = −x(t), y′(t) = 2y(t).
iii) x′(t) = 6x(t) + 3y(t), y′(t) = 3x(t) + 4y(t).
iv) x′(t) = y(t), y′(t) = 2x(t) + y(t).
v) x′(t) = x(t) + y(t), y′(t) = −2x(t) + y(t).
vi) x′(t) = x(t) + y(t), y′(t) = −4x(t)− y(t).
Problema 2. Determinar todas las funciones x, y, z : R −→ R de clase C1(R) que satisfacenlas identidades x′(t) = −x(t) + e−t, y′(t) = 2x(t)− y(t), z′(t) = −x(t)− 3y(t)− z(t).
Problema 3. Determinar todas las funciones x, y : R −→ R de clase C1(R) que satisfacenlas identidades x′1 = 2x1 + 4x2 + 3x′2 + 3etcos(t)− 2et sin(t), x′′2 + x1 + 2x2 + 2x′2 = et sin(t).
Problema 4. Demostrar que el sistema lineal homogéneo es autónomo si y sólo si la matrizde coeficientes es constante.
Problema 5. Determinar todas las soluciones del sistema x′(t) = Ax(t), con A ∈ Mm(R),que se expresan de la forma x(t) = h(t)v donde h ∈ C1(R) y v ∈ Rm.
Problema 6. Sean a ∈ R, Aa la matriz definida como Aa =
a 1 0 00 −a 0 11 1 a 00 1 0 −a
y el
sistema lineal x′(t) = Ax(t). Determinar los valores de a para los cuales existen solucionesde equilibrio no triviales, es decir no nulas y determinar el número de ellas linealmenteindependientes. Hallar también una base de soluciones del sistema.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

122 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Problema 7. Sean A ∈ Mm(R) y el sistema lineal homogéneo x′(t) = Ax(t). Caracterizarlas soluciones de equilibrio del sistema y determinar el número de soluciones de equilibriolinealmente independientes que existen.
Problema 8. Resolver los sistemas lineales homogéneos x′(t) = A1x(t) y x′(t) = A2x(t)donde
A1 =
(2 1−1 4
)y A2 =
(3 5−5 3
).
Problema 9. Resolver los sistemas lineales homogéneos x′(t) = A1x(t) y x′(t) = A2x(t)donde
A1 =
3 −1 12 0 11 −1 2
y A2 =
0 2 −30 −2 40 1 2
.
Problema 10. Resolver los sistemas lineales homogéneos x′(t) = A1x(t), x′(t) = A2x(t) yx′(t) = A3x(t) donde
A1 =
1 1 0 00 1 1 00 0 1 00 6 0 1
, A2 =
1 1 1 12 2 2 23 3 3 34 4 4 4
y A3 =
0 0 0 01 0 0 11 0 0 10 −1 1 0
.
Problema 11. Resolver los problemas de valor inicial
(x′(t)y′(t)
)=
(1 14 1
)(x(t)y(t)
),
(x(0)y(0)
)=
(23
),
(x′(t)y′(t)
)=
(1 −3
−2 2
)(x(t)y(t)
),
(x(0)y(0)
)=
(05
).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 123
Problema 12. Hallar las funciones x, y, z ∈ C1(R) que verifican las identidades
x′(t) = 3x(t)− y(t) + 2e−2t, x(0) = 0,
y′(t) = −x(t) + 3 y(t), y(0) = 0,
z′(t) = 2 x(t) + 2 y(t) + 2 z(t)− 2, z(0) = 1.
Problema 13. Resolver los problemas de valor inicial
x′(t)y′(t)z′(t)
=
3 1 −11 3 −13 3 −1
x(t)y(t)z(t)
,
x(0)y(0)z(0)
=
−2
03
,
x′(t)y′(t)z′(t)
=
1 −1 01 2 11 10 2
x(t)y(t)z(t)
,
x(0)y(0)z(0)
=
−1−413
,
x′(t)y′(t)z′(t)
=
−3 0 2
1 −1 0−2 −1 0
x(t)y(t)z(t)
,
x(0)y(0)z(0)
=
0−1−2
,
x′(t)y′(t)z′(t)
=
−21 19 −20
19 −21 −2040 −40 −40
x(t)y(t)z(t)
,
x(0)y(0)z(0)
=
01
−1
.
Problema 14. Resolver los problemas de valor inicial
x′(t)y′(t)z′(t)
=
3 −1 12 0 11 −1 2
x(t)y(t)z(t)
+
t00
,
x(0)y(0)z(0)
=
001
,
x′(t)y′(t)z′(t)
=
2 0 11 0 11 −2 0
x(t)y(t)z(t)
+
t2
01
,
x(0)y(0)z(0)
=
−1−413
,
x′(t)y′(t)z′(t)
=
3 0 00 1 50 −5 1
x(t)y(t)z(t)
+
01
sen(5t)
,
x(0)y(0)z(0)
=
000
.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

124 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Problema 15. Hallar la solución del problema de valores iniciales
x′(t)y′(t)z′(t)
=
0 −1 81 −2 −20 0 4
x(t)y(t)z(t)
+
e−t
e−t
0
,
x(0)y(0)z(0)
=
110
.
Problema 16. Resolver el problema de valor inicial
x′(t)y′(t)z′(t)w′(t)
=
0 2 0 0−2 0 0 0
0 0 0 −30 0 3 0
x(t)y(t)z(t)w(0)
,
x(0)y(0)z(0)w(0)
=
1110
Problema 17. Fijado a ∈ R con a 6= 0, hallar todas las funciones x, y, z, u ∈ C1(R) quesatisfacen las identidades
x′(t) = ax(t) + y(t), y′(t) = z(t) +1
ay(t), z′(t) = az(t) + y(t), u′(t) = y(t) + au(t).
Problema 18. Dados los escalares a, b, c, d, e ∈ R, resolver el sistema lineal
x′(t) = ax(t) + bz(t)y′(t) = cy(t)z′(t) = dy(t) + ez(t)
Problema 19. Dados a, b, c ∈ R, determinar todas las soluciones del sistema lineal
x′(t)y′(t)z′(t)
=
a b 0c a b0 c a
x(t)y(t)z(t)
+
abc
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 125
Problema 20. Consideremos los escalares a, b, c ∈ R con b 6= 0, θ =√
b2 + c2, la matriz
A =
a b cb a 0c 0 a
y la aplicación f : (0, +∞) −→ R3 definida como
f(t) = eta[2tθsh(tθ),−√2cln (t) + 2btch(tθ),
√2bln (t) + 2ctch(tθ)
].
Resolver el sistema lineal x′(t) = Ax(t) + f(t), t > 0.
Problema 21. Fijado t0 ∈ R, hallar las únicas funciones x, y, z, u ∈ C1(R) que satisfacenlas identidades
x′(t) = 4 x(t), x(t0) = 1,
y′(t) = x(t) + 4 y(t), y(t0) = 1,
z′(t) = −y(t) + 4 z(t) + u(t), z(t0) = 1,
u′(t) = x(t) + 4 u(t), u(t0) = 1.
Problema 22. Fijado t0 ∈ R, hallar las únicas funciones x, y, z, u ∈ C1(R) que satisfacenlas identidades
x′(t) = −2 x(t), x(t0) = 2,
y′(t) = x(t)− y(t)− u(t) + e−2t, y(t0) = 0,
z′(t) = x(t)− y(t)− 2 z(t) + u(t), z(t0) = 1,
u′(t) = y(t)− 3 u(t) + e−2t, u(t0) = 0.
Problema 23. Si a, b ∈ R, hallar las únicas funciones x, y ∈ C1(R) que satisfacen lasidentidades
x′(t) = a x(t) + b y(t) + teat, x(0) = a,
y′(t) = x(t) + a y(t) + t2eat, y(0) = a.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

126 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Problema 24. Dados a, b ∈ R, resolver el problema de valores iniciales
x′(t) = a x(t)− b z(t) + (1 + b2) eat, x(0) = 0,
y′(t) = a y(t) + z(t) + b (1 + b2) eat, y(0) = 0,
z′(t) = b x(t)− y(t) + a z(t), z(0) = 1 + b2.
Problema 25. Dados a, b, t0 ∈ R, hallar las únicas funciones x, y, z ∈ C1(R) que satisfacenlas identidades
x′(t) = a x(t) + b y(t), x(t0) = a,
y′(t) = b x(t) + a y(t) + b z(t), y(t0) = b√
2,
z′(t) = b y(t) + a z(t), z(t0) = −a,
Problema 26. Para cada a ∈ R, resolver el problema de valores iniciales
x′(t) = (a + 1) x(t)− y(t) + 1, x(0) = −1
y′(t) = x(t) + (a− 1) y(t) + 1, y(0) = −1
z′(t) = 3z(t) + t, z(0) = −1
9
Problema 27. Hallar la única solución del problema de valores iniciales
x′(t)y′(t)z′(t)
=
5 0 2−2 3 −2
0 2 1
x(t)y(t)z(t)
+ 2 t e3 t
−1
11
;
x(0)y(0)z(0)
=
1−1
1
Problema 28. Hallar las únicas funciones x1, x2, x3 : R −→ R de clase C1(R) que satisfacenlas identidades
x′1(t) = x1(t) + x2(t) + 3x3(t)
x′2(t) = 2x1(t) + 2x2(t)− 3x3(t)
x′3(t) = −2x1(t) + x2(t) + 6x3(t) + e3t
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 127
y también que x1(0) = 0, x2(0) = 1 y x3(0) = 0.
Problema 29. Dados los escalares a, b, x0, y0, z0, u0 ∈ R determinar las únicas funciones declase C1(R), x, y, z, u : R −→ R, que satisfacen las identidades
x′(t) = a x(t) + y(t) + b eat, x(0) = x0,
y′(t) = a y(t)− b u(t)− b2eat sen(bt), y(0) = y0,
z′(t) = x(t) + y(t) + a z(t) + eat[sen(bt) + bcos(bt)
], z(0) = z0,
u′(t) = b y(t) + a u(t) + b2 eatcos(bt), u(0) = u0.
Problema 30. Hallar las funciones xj ∈ C1(R), j = 1, . . . , 6, que satisfacen las identidades
x′1(t) = 2x1(t)− x2(t) + t,
x′2(t) = 2x2(t)− 1,
x′3(t) = x3(t) + x4(t) + cos(t),
x′4(t) = −x3(t) + x4(t)− sen(t),
x′5(t) = −x3(t) + x5(t) + x6(t)− cos(t),
x′6(t) = −x4(t)− x5(t) + x6(t) + sen(t).
De entre todas ellas determinar las que verifican que xj(1) = 0, j = 1, . . . , 6 y tambiénlas que verifican que x1(1)− x4(1) = x2(1)− x6(1) = x3(1) = x5(1) = 0.
Problema 31. Sean a, b, c ∈ R, θ =√
a2 + b2 + c2 y la matriz A =
0 a b−a 0 c−b −c 0
.
Demostrar que θ es el módulo de los autovalores complejos de A y que v = (c,−b, a)T esun autovector correspondiente al autovalor 0. Si I ⊂ R es un intervalo no trivial y h ∈ C(I)concluir que para cada t0 ∈ I
Φ(t) = Id +1
θsin
(θ
∫ t
t0
h(s) ds
)A +
1
θ2
[(1− cos
(θ
∫ t
t0
h(s) ds
)]A2
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

128 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
es una matriz fundamental del sistema x′(t) = h(t)Ax(t) y también que
G(t, s) = Id +1
θsin
(θ
∫ t
s
h(u) du
)A +
1
θ2
[(1− cos
(θ
∫ t
s
h(u) du
)]A2
es la función de Green de dicho sistema.
Problema 32. Si τ ∈ R y A =
0 1 0−1 0 −τ0 τ 0
, hallar Φ, la única matriz fundamental del
sistema x′(t) = 3t2Ax(t) que satisface Φ(0) = Id.
Problema 33. Dados a, b ∈ R, determinar todas las funciones x, y, z ∈ C1(R) que verificanlas identidades
x′(t) = a y(t) + b z(t) + b, x(0) = 0,
y′(t) = −a x(t), y(0) = a,
z′(t) = −b x(t), z(0) = b.
Problema 34. Dados a, b, t0,∈ R y θ =√
1 + b2, hallar las únicas funciones x, y, z ∈ C1(R)que satisfacen las identidades
x′(t) = a x(t) + b y(t) + b cos(θt), x(t0) = 1,y′(t) = −b x(t) + a y(t)− z(t) + θ sen(θt), y(t0) = θ,z′(t) = y(t) + a z(t) + cos(θt), z(t0) = −b.
Problema 35. Obtener todas las curvas planas cuya curvatura es constante e igual a k ∈ R.
Problema 36. Sean I ⊂ R un intervalo no trivial, f, g : I −→ R funciones continuas con fno nula, B, C ∈ Mm(R) y consideremos la aplicación matricial A : I −→ Mm(R) definidacomo A(t) = f(t)B + g(t)C. Demostrar que A(t)A(s) = A(s)A(t), para cada t, s ∈ I si ysólo si
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 129
(f(t)g(s)− f(s)g(t)
)(BC − CB
)= 0, para cada t, s ∈ I,
y por tanto si y sólo si o bien B y C conmutan o bien existe α ∈ R tal que g(t) = αf(t) paracada t ∈ I.
Problema 37. Sean I ⊂ R un intervalo no trivial, f, g ∈ C(I) y A =
[f 0f g
]. Fijado
t0 ∈ I, hallar Φ la única matriz fundamental del sistema x′(t) = A(t)x(t) tal que Φ(t0) = I.
Problema 38. Sean I ⊂ R un intervalo no trivial, f ∈ C(I) y A =
[1 0f 0
]. Dado t0 ∈ I, se
define Φ(t) = e
∫ t
t0
A(s)ds¿Qué explicación tiene que Φ′(t) 6= A(t)Φ(t)? Resolver el sistema
x′(t) = A(t)x(t).
Problema 39. Encontrar una matriz fundamental del sistema x′(t) = A(t)x(t) donde
A(t) =
[e2t + e−t e2t − e−t
e2t − e−t e2t + e−t
].
Problema 40. Fijados I ⊂ R un intervalo no trivial, las funciones f, g ∈ C(I) y la aplicación
matricial A : I −→ M3(R) dada por A =
f + 9g f − 3g −2f − 3g
f − 3g f + 9g −2f − 3g
−2f − 3g −2f − 3g 4f + 9g
, resolver el
sistema x′(t) = A(t)x(t).
Problema 41. Fijados I ⊂ R un intervalo no trivial, las funciones a, b, c, d ∈ C(I) y la
aplicación matricial A : I −→M2(R) dada por A =
[a b
c d
], hallar la condición necesaria
y suficiente para que A(t)A(s) = A(s)A(t) para cada t, s ∈ I y en ese caso resolver el sistemax′(t) = A(t)x(t).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

130 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
Problema 42. Fijados I ⊂ R un intervalo no trivial, las funciones α, β, γ ∈ C(I) y la
aplicación matricial A : I −→ M3(R) dada por A =
α β γ
β α 0
γ 0 α
, hallar la condición
necesaria y suficiente para que A(t)A(s) = A(s)A(t) para cada t, s ∈ I y en ese caso resolverel sistema x′(t) = A(t)x(t).
Problema 43. Fijados I ⊂ R un intervalo no trivial, las funciones a, b, c, d ∈ C(I) y la apli-
cación matricial A : I −→ M3(R) dada por A =
a b c
−b a d
−c −d a
, determinar la condición
necesaria y suficiente para que A(t)A(s) = A(s)A(t) para cada t, s ∈ I y en ese caso resolverel sistema x′(t) = A(t)x(t). Cuando la anterior propiedad se satisfaga, dados t0 ∈ I, x0 ∈ R3
y la función f : I −→ R definida como
f(t) = b(t)eα(t)(1, cos
(β(t)
), sen
(β(t)
)), donde α(t) =
∫ t
t0
a(s) ds, β(t) =
∫ t
t0
b(s) ds,
resolver el problema de valores iniciales x′(t) = A(t)x(t) + f(t), x(t0) = x0.
Problema 44. Demostrar que si A ∈ Mm(R) entonces eAT=
(eA
)T . Concluir que si Aes normal, es decir si AAT = AT A, entonces eA es normal y más concretamente si A essimétrica, entonces eA también lo es. Demostrar también que si A es antisimétrica, entonceseA es una matriz de rotación, es decir ortogonal con determinante igual a 1.
Problema 45. Si A ∈ Mm(R), utilizar la forma canónica de Jordan de A para determinarcuándo eA = I. Concluir que si todos los autovalores de A son reales, entonces eA = I siy sólo si A = 0, pero que esto no es cierto si A tiene autovalores complejos. Utilizar estosresultados para caracterizar aquéllas matrices B que conmutan con A y satisfacen ademásque eA = eB.
Problema 46. Si R ∈Mm(R) es una matriz de rotación, demostrar que existe A ∈Mm(R)antisimétrica y tal que eA = R. ¿Es única la matriz A?
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ejercicios 131
Problema 47. Si A ∈Mn(R), demostrar las siguientes afirmaciones:
i) Si A es estable, entonces trA ≤ 0. Concluir que si trA > 0, entonces A es inestable.
ii) Si A es asintóticamente estable, entonces trA < 0. Concluir que si trA = 0, entoncesA no es asintóticamente estable.
Problema 48. Determinar los valores de a, b, c ∈ R para los cuales la matriz A =
[a b0 c
]
es estable o asintóticamente estable.
Problema 49. Estudiar la estabilidad y estabilidad asintótica de las matrices
A1 =
3 0 00 1 50 −5 1
, A2 =
−1 0 0
0 −3 10 0 −3
y A3 =
0 0 00 4 40 1 1
.
Problema 50. Estudiar los valores de a ∈ R para los cuales el sistema
x′(t) = y(t),
y′(t) = (a− 1)x(t) + ay(t)
es estable o asintóticamente estable.
Problema 51. Consideremos la aplicación matricial A : R −→ M2(R) determinada por la
asignación A(t) =
[ −1 e2t
0 −1
], para cada t ∈ R. Demostrar que para cada t ∈ R la matriz
A(t) es asintóticamente estable pero que sin embargo la aplicación matrical A no es estable.
Problema 52. Si r ≥ 0, determinar los valores de θ ∈ R para los cuales la matriz
Aθ =
[r cos θ r sen θ
−r sen θ r cos θ
]
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

132 Ecuaciones diferenciales ordinarias. Métodos de solución de Sistemas Lineales
es estable o asintóticamente estable.
Problema 53. Considerar A ∈Mn(R) y suponer que A es antisimétrica. Demostrar que Aes estable pero no asintóticamente estable.
Problema 54. Considerar A ∈ Mn(R) y suponer que A es simétrica. Demostrar que A esestable sii es semidefinida negativa y asintóticamente estable sii es estrictamente definidanegativa.
Problema 55. Considerar A ∈ Mn(R) y suponer que A es normal, es decir AAT = AT A.Demostrar que A es estable o asintóticamente estable sii su parte simétrica, es decir la matriz12(A + AT ), es estable o asintóticamente estable, respectivamente.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
TEM
A5 ECUACIONES LINEALESDE ORDEN SUPERIOR
5.1. Introducción
Nuestro propósito en este capítulo es abordar el estudio de las ecuaciones lineales deorden superior, es decir de orden mayor que 1. El único ejemplo de esta situación que hemosanalizado hasta ahora corresponde a la generalización del problema del cálculo de primitivas.Concretamente en la Introducción del primer tema planteamos la EDO de segundo orden
x′′(t) = f(t)
y para resolverla planteamos la siguiente estrategia que la reducía a dos ecuaciones de primerorden: Si consideramos la función auxiliar y(t) = x′(t), entonces y′(t) = f(t). Aunque enaquel momento no precisamos más, realmente lo que hicimos fue convertir la EDO en elsiguiente sistema
x′(t) = y(t)
y′(t) = f(t)
que resolvimos de manera regresiva. De forma equivalente, podemos expresar el sistemaanterior como
[x′(t)
y′(t)
]=
[0 1
0 0
][x(t)
y(t)
]+
[0
f(t)
].
133
134 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
De manera más general si, como propusimos en el primer problema del Tema 1, pretende-mos resolver la EDO de orden n + 1
xn+1)(t) = f(t)
podemos hacerlo planteando el sistema de primer orden con n + 1 ecuaciones e incógnitas
x′1(t)...
x′n(t)
x′n+1(t)
=
0 1 · · · 0
...... . . . ...
0 0 · · · 1
0 0 · · · 0
x1(t)
...
xn(t)
xn+1(t)
+
0
...
0
f(t)
, donde x1(t) = x(t).
y resolverlo de manera regresiva. Los mismos argumentos concluyen también que el problemade valores iniciales
xn+1)(t) = f(t), x(t0) = z0, . . . , xn)(t0) = zn
es equivalente al siguiente problema de valores iniciales
x′1(t)...
x′n(t)
x′n+1(t)
=
0 1 · · · 0
...... . . . ...
0 0 · · · 1
0 0 · · · 0
x1(t)
...
xn(t)
xn+1(t)
+
0
...
0
f(t)
,
x1(t0)
...
xn(t0)
xn+1(t0)
=
z0
...
zn−1
zn
,
situación en la que nuevamente la incógnita inicial x es igual a la función x1.
Como veremos a continuación esta estrategia de reformular la EDO xn+1(t) = f(t) comoun sistema de primer orden no es exclusiva del cálculo de primitivas y puede generalizarse atodas las situaciones que nos plantearemos.
5.2. Teoría general para ecuaciones de orden superior
El objetivo de esta sección es el estudio de los problemas de valores iniciales asociadosa las ecuaciones lineales escalares, es decir a las ecuaciones lineales de orden n ≥ 1. El caso
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Teoría general para ecuaciones de orden superior 135
particular n = 1 fue completamente descrito y resuelto en el primer tema, de hecho sirvióde guía para el desarrollo del Tema 4, de manera que nuestro interés se centrará en analizarel caso n > 1, lo que justifica la denominación de orden superior que hemos adoptado paradescribir el contenido del presente capítulo. De acuerdo con las notaciones establecidas en elprimer tema tenemos la siguiente nomenclatura:
Datos de una EDO lineal de orden superior
• El número natural no nulo n y el intervalo no trivial I ⊂ R.• Término fuerza: f : I −→ R continua.
• Coeficientes: aj : I −→ R continuas, j = 1, . . . , n,
Los datos anteriores determinan la EDO
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t), (5.1)
que cuando n = 1 es equivalente a la EDO lineal x′(t) = a(t)x(t)+f(t), donde a(t) = −a1(t),que fue analizada y resuelta en el primer tema. La identidad (5.1) plantea el problema debuscar las funciones x ∈ Cn(I) tales que para cada t ∈ I satisfagan la identidad descrita.cada una de tales funciones será denominada solución de la EDO.
Es razonable esperar que el conjunto de soluciones de la EDO (5.1) dependa de n cons-tantes y que éstas puedan ser determinadas imponiendo que la solución verifique condicionesadicionales. Así, denominaremos Problema de valores iniciales al consistente en fijados t0 ∈ Iy x0, . . . , xn−1 ∈ R, determinar la/s solución/es de la EDO (5.1) que además satisfacen quex(t0) = x0, x′(t0) = x1, . . . , xn−1(t0) = xn−1. Representaremos tal problema en la formasiguiente:
Problema de valores inicialesxn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = f(t)
x(t0) = x0, x′(t0) = x1, . . . , xn−1)(t0) = xn−1
Por las mismas razones que ya fueron descritas en el estudio de los sistemas de lineales deEDO, que abordamos en los temas anteriores, para describir el conjunto de soluciones de laEDO (5.1) será de gran importancia el análisis de la EDO que tiene los mismos coeficientesy donde el término fuerza es nulo.
Denominamos ecuación homogénea asociada a (5.1) a la EDO lineal de orden n
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = 0.
(5.2)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

136 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Como comentamos en la introducción de este tema, es posible reducir el análisis deuna EDO lineal de orden n al de un sistema lineal, que denominaremos sistema equivalente.Concretamente, demostraremos que
si A : I −→Mn(R) y f ∗ : I −→ Rn están definidas como
A(t) =
0 1 · · · 0
...... . . . ...
0 0 · · · 1
−an(t) −an−1(t) · · · −a1(t)
, f ∗(t) =
0...0
f(t)
,
entonces dados t0 ∈ I y x0, . . . , xn−1 ∈ R, x : I −→ R es una solución delproblema de valores iniciales xn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = f(t),x(t0) = x0, . . . , x
n−1(t0) = xn−1, si y sólo si z : I −→ Rm definida co-mo z(t) =
(x(t), . . . , xn−1)(t)
)T , es solución del problema de valores inicialesz′(t) = A(t)z(t) + f ∗(t), z(t0) =
(x0, . . . , xn−1
)T ∈ Rn. En particular, x essolución de la ecuación homogénea xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0 siy sólo si z es solución del sistema homogéneo z′(t) = A(t)z(t).
(5.3)
Supongamos que z =(z1(t), . . . , zn(t)
)T es de clase C1(I). Entonces, tenemos que
A(t)z(t) + f ∗(t) =
0 1 · · · 0
...... . . . ...
0 0 · · · 1
−an(t) −an−1(t) · · · −a1(t)
z1(t)
...
zn−1)(t)
zn(t)(t)
+
0
...
0
f(t)
=
z2(t)
...
zn(t)
f(t)− an(t)z1(t)− · · · − a2(t)zn−1(t)− a1(t)zn(t)(t)
de manera que z′(t) = A(t)z(t) + f ∗(t) si y sólo si
z′j(t) = zj+1(t), para cada j = 1, . . . , n− 1
z′n + a1(t)zn(t)(t) + a2(t)zn−1(t) + · · ·+ an(t)z1(t) = f(t).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Teoría general para ecuaciones de orden superior 137
Como z1(t) = z2(t) y z′2(t) = z3(t), resulta que z′′1 (t) = z3(t). Si suponemos que para cadak < n− 1 se satisface que z
k)1 (t) = zk+1(t), entonces
zk+1)1 (t) =
(z
k)1 (t)
)′= z′k+1(t) = zk+2(t).
lo que implica que
zk)1 (t) = zk+1(t), para cada k = 1, . . . , n− 1.
Por tanto, hemos demostrado que si z(t) =(z1(t), . . . , zn(t)
)T es una solución del sistemaz′(t) = A(t)z(t) + f ∗(t) necesariamente zj(t) = zj−1)(t) para cada j = 2, . . . , n. Teniendoestas identidades en cuenta, resulta que
f(t) = z′n(t) + a1(t)zn(t) + a2(t)zn−1(t) + · · ·+ an(t)z1(t)
=(z
n−1)1
)′(t) + a1(t)z
n−1)1 (t) + a2(t)z
n−2)1 (t) + · · ·+ an(t)z1(t)
= zn)1 (t) + a1(t)z
n−1)1 (t) + a2(t)z
n−2)1 (t) + · · ·+ an(t)z1(t)
es decir z1 es una solución de (5.1). Recíprocamente si x es una solución de (5.1), siguiendolos pasos anteriores, es inmediato comprobar que z(t) =
(x(t), . . . , xn−1)(t)
)T es una solucióndel sistema z′(t) = A(t)z(t) + f ∗(t). El resto de afirmaciones de (5.3) son ahora inmediatasde verificar.
Después de este resultado, resulta que las propiedades fundamentales de las soluciones delas EDO lineales de orden superior aparecen como consecuencia inmediata de las propiedadesde las soluciones de los sistemas lineales, que fueron desarrolladas en los temas precedentes.En particular, del Teorema de existencia y unicidad de solución de cada problema de valor inicialpara sistemas lineales se deduce inmediatamente que
cada problema de valor incial para la la EDO lineal
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t)
tiene solución única.
(5.4)
De manera análoga a la situación que se presenta para sistemas lineales, el hecho deque todas las soluciones de la ecuación lineal sean globales, permite superponer soluciones.Tenemos así la siguiente transcripción del principio de superposición:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
138 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Principio de superposición para ecuaciones lineales
Dados n ∈ N∗ y a1, . . . , an ∈ C(I), el conjunto de soluciones de la EDO lineal homogéneaxn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0 es un espacio vectorial real de dimensiónn y para cada función continua f ∈ C(I), el conjunto de soluciones de la EDO linealxn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = f(t) tiene estructura de espacio afín cuyavariedad lineal subyacente es el espacio vectorial de soluciones de la ecuación homogénea.Además, {x1, . . . , xn} es base de soluciones del sistema homogéneo si y sólo si existet0 ∈ I tal que
x1(t0)...
xn−1)1 (t0)
, . . . ,
xn(t0)...
xn−1)n (t0)
es base de Rn y esto ocurre si y sólo si
x1(t)...
xn−1)1 (t)
, . . . ,
xn(t)...
xn−1)n (t)
es base de Rn para todo t ∈ I.
La primera parte del anterior principio de superposición corresponde a la siguiente lecturade (3.14) aplicada a EDO lineales de orden superior:
Si xp es una solución de xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t), entonces
cualquier otra solución se expresa como x = xp + z donde z es una solución de laecuación homogénea zn)(t) + a1(t)z
n−1)(t) + · · ·+ an(t)z(t) = 0.(5.5)
Como el principio de superposición establece que la dimensión del espacio de solucionesde la EDO (5.2) es n, resulta que
si {x1, . . . , xn} es una base del espacio de soluciones de la EDO homogénea(5.2), entonces el espacio vectorial de las soluciones de (5.2) está determi-nado por la identidad
{x(t) = c1x1(t) + · · ·+ cnxn(t) : c1, . . . , cn ∈ R
}.
(5.6)
Otra consecuencia importante del principio de superposición es que para encontrar unabase del espacio de soluciones de la EDO lineal homogénea (5.2), es suficiente escoger t0 ∈ Iy {u1, . . . , un} una base de Rn y resolver los n problemas de valor inicial cuyos datos estándeterminados por las componentes de cada uno de los vectores de la base.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Teoría general para ecuaciones de orden superior 139
Por otra parte, es conveniente disponer de algún argumento que permita dilucidar si nsoluciones de la EDO homogénea son base de soluciones de la misma. Para ello, será útil lasiguiente noción:
Dadas las funciones g1, . . . , gn ∈ Cn−1(I), se denomina wronskiano deg1, . . . , gn a la función w[g1, . . . , gn] : I −→ R definida como
w[g1, . . . , gn](t) = det
g1(t) · · · gn(t)... . . . ...
gn−1)1 (t) · · · g
n−1)n (t)
, para cada t ∈ I.
(5.7)
Teniendo presente la relación existente entre las soluciones de la EDO homogénea deorden superior (5.2) y las del sistema homogéneo equivalente a ella z′(t) = A(t)z(t), resultaque dadas x1, . . . , xn ∈ Cn(I) y la aplicación matricial Φ: I −→Mn(R) definida como
Φ(t) =
x1(t) · · · xn(t)... . . . ...
xn−1)1 (t) · · · x
n−1)n (t)
, para cada t ∈ I, (5.8)
entonces las funciones x1, . . . , xn son simultáneamente soluciones de la EDO homogéneaxn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0 si y sólo si la aplicación matricial Φ satisface laidentidad Φ′(t) = A(t)Φ(t). Además, es claro que, después de la definición de wronskiano,det Φ(t) = w[x1, . . . , xn](t), para cada t ∈ I, de manera que, si tenemos en cuenta que latraza de la matriz de coeficientes del sistema lineal equivalente a la EDO (5.2) es −a1 resultala siguiente consecuencia del correspondiente resultado para sistemas homogéneos:
Lema de Abel-Liouville para ecuaciones lineales
Fijados n ∈ N∗, I un intervalo no trivial y las funciones a1, . . . , an ∈ C(I), entonces six1, . . . , xn son soluciones de la EDO xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0, paracada t0 ∈ I se satisface que
w[x1, . . . , xn](t) = w[x1, . . . , xn](t0) e−
∫ t
t0
a1(s) ds, para cada t ∈ I.
Además, {x1, . . . , xn} son base del espacio de soluciones de la EDO homogénea si ysólo si existe t0 ∈ I tal que w[x1, . . . , xn](t0) 6= 0 o, de forma equivalente, si y sólo siw[x1, . . . , xn](t0) 6= 0, para cada t ∈ I.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

140 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Teniendo ahora en cuenta la relación expresada en (5.3) entre las soluciones de la EDO(5.2) y el sistema de primer orden asociado, la identidad 5.6) puede expresarse de maneraequivalente como
si {x1, . . . , xn} es una base del espacio de soluciones de la EDO homogénea(5.2) y Φ: I −→Mn(R) es la aplicación matricial definida como
Φ(t) =
x1(t) · · · xn(t)... . . . ...
xn−1)1 (t) · · · x
n−1)n (t)
, para cada t ∈ I,
entonces x es solución de (5.2) si y sólo si existe c ∈ Rn tal que
x(t) = [Φ(t)c]1 = primera componente deΦ(t)c.
(5.9)
La expresión anterior para el espacio de soluciones del sistema homogéneo, permite ahoradeterminar fácilmente la única solución de cada problema de valores iniciales:
Si dados t0 ∈ I y x0 ∈ Rm planteamos el problema de valores iniciales
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = 0, x(t0) = x0, . . . , x
n−1)(t0) = xn−1,
entonces x(t) = [Φ(t)c]1 para algún c ∈ Rn. Como además, aplicando (5.3), para cadak = 1, . . . , n − 1 tenemos que xk)(t) = [Φ(t)c]k = k-ésima componente deΦ(t)c, resulta quesi definimos el vector z0 = (x0, . . . , xn−1)
T ∈ Rn, entonces z0 = Φ(t0)c y en definitiva, hemosdemostrado que
si {x1, . . . , xn} es una base del espacio de soluciones de la EDO homogénea (5.2)y Φ: I −→Mn(R) es la aplicación matricial definida como
Φ(t) =
x1(t) · · · xn(t)... . . . ...
xn−1)1 (t) · · · x
n−1)n (t)
, para cada t ∈ I,
entonces para cada t0 ∈ I y cada z0 = (x0, . . . , xn−1) ∈ Rn la única solución delproblema de valores iniciales
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = 0, x(t0) = x0, . . . , x
n−1)(t0) = xn−1,
está dada por la identidad
x(t) =[Φ(t)Φ−1(t0) z0
]1
= primera componente deΦ(t)Φ−1(t0) z0.
(5.10)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Teoría general para ecuaciones de orden superior 141
Una vez resuelto completamente el problema de valores iniciales para la (5.2), podemosconsiderar f : I −→ R continua plantearnos resolver los problemas de valores iniciales aso-ciados a la EDO no homogénea (5.1). Como las soluciones de la EDo homogénea (5.2) sonnconocidas, después de (5.5), para conocer todas las soluciones de la EDO (5.1) es suficientedeterminar una solución particular xp. Por otra parte, teniendo nuevamente en cuenta laequivalencia entre la EDO (5.1) y el sistema asociado, basta considerar la primera compo-nente de una solución particular para este último, que como sabemos puede determinarse apartir del Método de variación de las constantes.
Supongamos pues que {x1, . . . , xn} es una base del espacio de soluciones de la EDOhomogénea (5.2) y consideremos la aplicación matricial determinada por ella, es decir,
Φ(t) =
x1(t) · · · xn(t)... . . . ...
xn−1)1 (t) · · · x
n−1)n (t)
, para cada t ∈ I.
Entonces, si α : I −→ Rn es una primitiva de Φ−1(t)f ∗(t), resulta que xp(t) =[Φ(t)α(t)
]1es
una solución particular de la EDO (5.1). En definitiva, tenemos la siguiente reformulaciónde (3.23):
Si {x1, . . . , xn} es una base de soluciones de la ecuación lineal homogéneaxn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0, entonces para cada f ∈ C(I),todaslas soluciones de la ecuación lineal xn)(t)+a1(t)x
n−1)(t)+ · · ·+an(t)x(t) = f(t),están determinadas por la expresión
x(t) = [c1 + α1(t)]x1(t) + · · ·+ [cn + αn(t)]xn(t),
donde c1, . . . , cn ∈ R y la función α : I −→ Rn dada por α(t) =(α1(t), . . . , αn(t)
)satisface que α′(t) = Φ−1(t)f ∗(t), o de forma equivalente,
x(t) =[Φ(t)c + Φ(t)α(t)
]1
=[Φ(t)c
]1+
[Φ(t)α(t)
]1, c ∈ Rn.
(5.11)
Si ahora fijamos t0 ∈ I y x0, . . . , xn−1 ∈ R, para identificar en la expresión (5.13) a laúnica solución de la EDO xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = f(t), que satisface estascondiciones iniciales podemos proceder directamente valorando la función obtenida en (5.13)y sus derivadas hasta el orden n− 1, en el punto t0, o también indirectamente aprovechandoque la equivalencia (5.3) entre la EDO y el sistema asociado se mantiene para los problemasde valor inicial. Así, si z0 = (x0, . . . , xn−1)
T , entonces
x(t) =[Φ(t)c + Φ(t)α(t)
]1
=[Φ(t)c
]1+
[Φ(t)α(t)
]1,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

142 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
donde Φ(t0)c + Φ(t0)α(t0) = z0. Aplicando la Fórmula de Lagrange para sistemas lineales,obtenemos
x(t) =
[Φ(t)Φ−1(t0)z0 + Φ(t)
∫ t
t0
Φ−1(s)f ∗(s) ds
]
1
=[Φ(t)Φ−1(t0)z0
]1+
∫ t
t0
[Φ(t)Φ−1(s)f ∗(s)
]1ds.
Por otra parte, para cada t, s ∈ I, la primera componente del vector Φ(t)Φ−1(s)f ∗(s) resultade multiplicar la primera fila de la matriz Φ(t)Φ−1(s) con el vector f ∗(s). Como este últimotiene sus primeras n − 1 componentes nulas, si denotamos por
[Φ(t)Φ−1(s)
]1,n
al primerelemento de la columna n-ésima de la matriz Φ(t)Φ−1(s), resulta que
[Φ(t)Φ−1(s)f ∗(s)
]1
=[Φ(t)Φ−1(s)
]1,n
f(s).
En definitiva, tenemos la siguiente adaptación de la Fórmula de Lagrange para el casode EDO lineales de orden superior:
Fórmula de Lagrange para ecuaciones lineales
Fijados n ∈ N∗, I un intervalo no trivial y a1, . . . , an ∈ C(I), si {x1, . . . , xn} es unabase del espacio de soluciones de la EDO xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0,entonces para , cada t0 ∈ I, cada x0, . . . , xn−1 ∈ R y cada f ∈ C(I), la función
x(t) =[Φ(t)Φ−1(t0)z0
]1+
∫ t
t0
[Φ(t)Φ−1(s)
]1,n
f(s) ds,
donde z0 =
x0...
xn−1
y Φ(t) =
x1(t) · · · xn(t)... . . . ...
xn−1)1 (t) · · · x
n−1)n (t)
, es la única solución
del problema de valores iniciales
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t), x(t0) = x0, . . . , x
n−1)(t0) = xn−1.
Observemos que al igual que en el caso de sistemas lineales, la Fórmula de Lagrange paraecuaciones lineales expresa la única solución del problema de valores iniciales
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t), x(t0) = x0, . . . , x
n−1)(t0) = xn−1
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

La función de Green de una ecuación lineal 143
como superposición de[Φ(t)Φ−1(t0)z0
]1con
∫ t
t0
[Φ(t)Φ−1(s)
]1,n
f(s) ds las únicas soluciones,
respectivamente, de los problemas de valores iniciales
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = 0, x(t0) = x0, . . . , x
n−1)(t0) = xn−1,
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t), x(t0) = 0, . . . , xn−1)(t0) = 0.
(5.12)
5.3. La función de Green de una ecuación lineal
Las expresiones obtenidas en la sección anterior tanto para la única solución de un pro-blema de valores iniciales para la EDO homogénea (5.2) como para la ecuación completa(5.1) depende de la base del espacio de soluciones de la EDO homogénea, fijada a priori.Sin embargo, como ocurría para el caso de los sistemas lineales, dicha dependencia es dehecho inexistente pues tal y como muestra la Fórmula de Lagrange para ecuaciones lineales,la expresión de la solución se determina en términos de G(t, s) = Φ(t)Φ−1(s), la funciónde Green del sistema equivalente a la EDO, que como sabemos caracteriza el sistema y esindependiente de la elección de la base de partida. Además, la Fórmula de Lagrange paraEDO lineales de orden superior sugiere como introducir el concepto análogo al de función degreen para sistemas lineales
Función de Green de una ecuaciónSi I ⊂ R es un intervalo no trivial, n ∈ N∗ y a1, . . . , an ∈ C(I), denominaremos Funciónde Green de la EDO lineal xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0 a la
g : I × I −→ R(t, s) −→ [
G(t, s)]1,n
,
donde G es la función de Green del sistema lineal equivalente a ecuación anterior.
Como la función de Green del sistema equivalente a la EDO depende exclusivamente delos coeficientes de la matriz A definida en (5.3), es decir de los coeficientes de la EDO (5.2),resulta que la función de Green de la EDO de orden n depende sólo de los coeficientes de laEDO. Nuevamente, la fórmula de Lagrange puede reescribirse en términos de la Función deGreen como sigue:
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

144 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Fórmula de Lagrange-Green para ecuaciones lineales
Fijados n ∈ N∗, I un intervalo no trivial y a1, . . . , an ∈ C(I), si g : I × I −→ R es lafunción de Green de la EDO xn)(t)+a1(t)x
n−1)(t)+ · · ·+an(t)x(t) = 0, entonces paracada t0 ∈ I, cada x0, . . . , xn−1 ∈ R y cada f : I −→ R continua, la función
x(t) = G(t, t0)z0 +
∫ t
t0
g(t, s)f(s) ds,
donde G es la función de Green del sistema equivalente a la EDO y z0 = (x0, . . . , xn−1)T ,
es la única solución del problema de valores iniciales
xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t), xk)(t0) = xk, k = 0, . . . , n− 1.
Observar que la Fórmula de Green-Lagrange permite en particular concluir que
si f ∈ C(I) y consideramos la función xp(t) =
∫ t
t0
g(t, s) f(s) ds, en-
tonces xp ∈ Cn(I) y además, xk)p (t0) = 0, para cada k = 0, . . . , n− 1.
(5.13)
Por otra parte, de la definición de la función G, se deducen las siguientes propiedadespara la función de Green de una EDO de orden n:
Se verifica que g ∈ C1(I × I) y además, para cada s ∈ I fijado, la funciónxs : I −→ R definida como xs(t) = g(t, s) satisface que xs ∈ Cn(I) y estácaracterizada como la única solución del problema de valores iniciales
xn)s (t) + a1(t)x
n−1)s (t) + · · ·+ an(t)xs(t) = 0, para cada t ∈ I,
xs(s) = x′s(s) = · · · = xn−2)s (s) = 0, x
n−1)s (s) = 1.
(5.14)
Naturalmente, este resultado podría haber obtenido haciemdo uso de la Fórmula de Leibnizde derivación bajo el signo y de las propiedades de la función de Green expresadas en (5.14).
Si nuevamente apelamos a la interpretación de la solución de cada problema de valoresiniciales para la EDO xn)(t)+a1(t)x
n−1)(t)+· · ·+an(t)x(t) = f(t) en términos de la respuestaa la perturbación externa f de un sistema físico, mecánico, químico, biológico, etc., y cuyascaracterísticas están recogidas en la matriz de coeficientes y cuyo estado en el instante t0 esconocido, resulta que la función de Green aparece como una propiedad intrínseca del sistemafísico, mecánico, químico o biológico, que depende exclusivamente de sus características ycapaz de proporcionar la información sobre el estado del mismo a partir de las perturbacionesintroducidas en él. De hecho, el primer sumando en la fórmula de Lagrange-Green representa
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales con coeficientes constantes 145
la evolución del estado del sistema, no sometido a acciones externas, a partir del conocimientodel estado en un instante dado, mientras que el segundo sumando representa la evolución delestado del sistema que en el instante t0 se hallaba en reposo y que está sometido a la acciónexterna f .
5.4. Ecuaciones lineales con coeficientes constantes
Al igual que hicimos para el caso de sistemas lineales, nos planteamos ahora la resoluciónexplícita de las EDO lineales de orden superior, cuando esto sea posible. De la teoría generalsabemos que la determinación explícita de las soluciones de la EDO (5.1) depende de queseamos capaces de determinar explícitamente las soluciones de (5.2). Supongamos pues queI ⊂ R es un intervalo no trivial y consideremos las funciones a1, . . . , an ∈ C(I) y la aplicación
matricial determinada por ellas, A(t) =
0 1 · · · 0...
... . . . ...0 0 · · · 1
−an(t) −an−1(t) · · · −a1(t)
, t ∈ I.
Como resolver la EDO lineal xn)(t) + a1(t)xn−1)(t) + · · · + an(t)x(t) = 0, es equivalente
a resolver el sistema z′(t) = A(t)z(t), debemos plantearnos cuándo será posible describirexplícitamente las soluciones de este sistema. De acuerdo con la teoría general desarrolladaen el tema anterior, una condición suficiente para determinar explícitamente una matrizfundamental del sistema es que se satisfaga la propiedad A(t)A(s) = A(s)A(t), para cadat, s ∈ I, pues en este caso, tal matriz fundamental se describe en términos de la exponencialde una primitiva de la matriz A.
En nuestro caso, tenemos que para cada t, s ∈ I se verifica que
A(t)A(s) =
0 0 1 · · · 0...
...... . . . ...
0 0 0 · · · 1−an(s) −an−1(s) −an−2(s) · · · −a1(s)
bn(t, s) bn−1(t, s) bn−2(t, s) · · · b1(t, s)
, donde
bn(t, s) = a1(t)an(s) y bk(t, s) = a1(t)ak(s)−ak+1(t), k = 1, . . . , n−1.
de manera que para que se satisfaga que A(t)A(s) = A(s)A(t), para cada t, s ∈ I debeocurrir que ak(s) = ak(t), para cada t, s ∈ I y cada k = 1, . . . , n, es decir que las funcionescoeficientes sean constantes. Además, si esta condición se satisface es obvio que A(t) es
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

146 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
constante y por tanto A(t)A(s) = A2 = A(s)A(t), para cada t, s ∈ I. En definitiva,
Fijados n ∈ N∗, I un intervalo no trivial y ak ∈ C(I), k = 1, . . . , n lacondición necesaria y suficiente para que la matriz de coeficientes del sistemaequivalente a la EDO lineal xn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0verifique la propiedad de conmutación es que las funciones coeficientes ak,k = 1, . . . , n sean constantes.
(5.15)
Después de este resultado, debemos suponer que los coeficientes de la EDO (5.1) sonconstantes, lo que en particular implica que el intervalo de definición de las soluciones de lacorrespondiente EDO homogénea es R. Consideremos pues a1, . . . , an ∈ R, la EDO
xn)(t) + a1xn−1)(t) + · · ·+ anx(t) = 0 (5.16)
y el sistema equivalente z′(t) = Az(t) donde A =
0 1 · · · 0...
... . . . ...0 0 · · · 1−an −an−1 · · · −a1
∈Mn(R).
De acuerdo con la teoría de sistemas lineales, la aplicación Φ(t) = etA es matriz fundamen-tal y G(t, s) = e(t−s)A la función de Green del sistema. Por tanto, las funciones componentesde la primera fila de la matriz etA es base de soluciones de la EDO (5.16) y la primeracomponente de la última columna de e(t−s)A su función de Green. Observar también que siP ∈ Mn(R) es no singular, entonces la primera fila de la matriz etAP determina una basede soluciones de (5.16) y recíprocamente toda base de soluciones de (5.16) se obtiene de estaforma.
Según la teoría desarrollada en el tema anterior, para calcular etA es conveniente deter-minar la Forma Canónica de Jordan de A, lo que requiere previamente el cálculo de losautovalores de A así como la determinación de sus multiplicidades algebraica y geométrica.También es preciso conocer una base de Jordan determinada por A.
Los autovalores, reales o complejos, de A son las raíces de su polinomio característico, esdecir de
pA(x) = det [xI − A] = det
x −1 0 · · · 00 x −1 · · · 0...
... . . . . . . ...0 0 · · · x −1an an−1 · · · a2 x + a1
.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales con coeficientes constantes 147
Si para cada k = 1, . . . , n, definimos pk(x) = det
x −1 0 · · · 00 x −1 · · · 0...
... . . . . . . ...0 0 · · · x −1ak ak−1 · · · a2 x + a1
, en-
tonces pn(x) = pA(x), p1(x) = x+a1 y además desarrollando por la primera columna, resulta
que para cada k = 2, . . . , n se tiene que
pk(x) = xpk−1(x)+(−1)k+1ak det
−1 0 · · · 0x −1 · · · 0... . . . . . . ...0 · · · x −1
= xpk−1(x)+ak. (5.17)
Como p2(x) = x(x+a1)+a2 = x2+a1x+a2, si suponemos que pk(x) = xk+a1xk−1+· · ·+ak,
de (5.17) deducimos que
pk+1(x) = xpk(x)+ak+1 = xk+1+a1xk+· · ·+akx+ak+1, para cada
k = 1, . . . , n− 1 y, en particular, pA(x) = xn + a1x
n−1 + · · ·+ an.(5.18)
Como puede observarse, el polinomio característico de la matriz sistema de primer ordenequivalente a la ecuación depende sólo de los coeficientes de la ecuación.
Dados a1, . . . , an ∈ R, denominamos polinomio característico de la EDO xn)(t) +a1x
n−1)(t) + · · ·+ anx(t) = 0 a p(x) = xn + a1xn−1 + · · ·+ an.
(5.19)
Una vez determinado el polinomio característico de la matriz del sistema equivalente a laEDO (5.16) el siguiente paso para describir las soluciones de la EDO es calcular los vectorespropios y la multiplicidad geométrica de cada autovalor.
Supongamos pues que λ ∈ C es un cero del polinomio característico de la EDO (5.16), esdecir satisface que λn + a1λ
n−1 + · · ·+ an = 0. Los autovectores correspondientes a λ son losvectores pertenecientes al subespacio ker[A−λI], es decir los vectores v = (u1, . . . , un)T ∈ Cn
tales que
λ −1 0 · · · 00 λ −1 · · · 0...
... . . . . . . ...0 0 · · · λ −1an an−1 · · · a2 λ + a1
u1...
un
=
0...0
, (5.20)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

148 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
lo que implica que uk = λuk−1, para cada k = 2, . . . , n y por tanto que uk = λk−1u1, paracada k = 1, . . . , n. Observar que la última ecuación de (5.20) determina que
0 = (λ + a1)un + a2un−1 + · · ·+ anu1 =((λ + a1)λ
n−1 + a2λn−2 + · · ·+ an
)u1 = p(λ)u1,
y es por tanto una ecuación redundante puesto que por hipótesis p(λ) = 0. Así pues, u1 estáindeterminado y por tanto hemos obtenido que
si p(λ) = 0, entonces ker[A − λI] = sg{(1, λ, . . . , λn−1)T
}y por tanto,
dim ker[A− λI] = 1.(5.21)
Si recordamos la influencia que en la Forma Canónica de Jordan de A tiene el valordim ker[A − λI], resulta que si λ ∈ R, sólo existe un bloque de Jordan asociado a λ y cuyotamaño es mλ ≥ 1, la multiplicidad de λ como raíz de p(x), mientras que si λ ∈ C \ R,entonces sólo existe un bloque de Jordan asociado a λ y λ, cuyo tamaño es 2mλ, donde mλ
es nuevamente la multiplicidad de λ como raíz de p(x).
Supongamos ahora que λ ∈ R satisface que p(λ) = 0 y tiene a m ≥ 1 como multiplicidad.Consideremos también {u1, . . . , um} los vectores de la base de Jordan determinados por λ.En estas circunstancias, sabemos que
Auk = λuk + uk+1, para cada k = 1, . . . ,m− 1 y Aum = λum,
lo que implica que las funciones
zk(t) = etλ
[uk + t uk+1 + · · ·+ tm−k
(m− k)!um
], k = 1, . . . , m, (5.22)
son un sistema de soluciones linealmente independientes del sistema z′(t) = Az(t). Aplicandola equivalencia entre las soluciones de este sistema y las de la EDO (5.16), resulta que sipara cada k = 1, . . . , m, denotamos por uk,1 a la primera componente del vector uk y porzk,1 a la primera componente de la función zk, entonces
zk,1(t) = etλ
[uk,1 + t uk+1,1 + · · ·+ tm−k
(m− k)!um,1
], k = 1, . . . ,m,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales con coeficientes constantes 149
son un sistema de soluciones linealmente independientes de (5.16).
Por otra parte, um = um,1
(1, λ, . . . , λn−1
)T con um,1 6= 0, puesto que um es un autovectorno nulo asociado a λ. Resulta entonces que zm,1(t) = um,1e
tλ y como la EDO (5.16) es lineal
y um,1 6= 0, la función x1(t) =1
um,1
zk1(t) = etλ es también solución de (5.16).
Como zm−1,1(t) = etλ[um−1,1 + t um,1
], la linealidad de la EDO (5.16) implica ahora
que x2(t) =1
um,1
[zm−1,1(t) − um−1,1x1(t)
]= t etλ es también solución de (5.16), y tiene la
propiedad de que {x1, x2} generan el mismo subespacio que {zm,1, zm−1,1}.Si suponemos que las funciones xk(t) = tk−1etλ, 1 ≤ k < m son soluciones de (5.16) tales
que sg{x1, . . . , xk} = sg{zm,1, . . . , zm−k−1,1}, entonces como
zm−k,1(t) = etλ
[um−k,1 + t um−k+1,1 + · · ·+ tk−1
(k − 1)!um−1,1 +
tk
k!um,1
]
= um−k,1x1(t) + · · ·+ um−1,1
(k − 1)!xk(t) +
tm
m!um,1e
tλ,
resulta que la función
xk+1(t) =k!
um,1
[zm−k,1(t)− um−k,1x1(t)− · · · − um−1,1
(k − 1)!xk(t)
]= tketλ,
es también solución de la EDO (5.16) y claramente sg{x1, . . . , xk+1} = sg{zm,1, . . . , zm−k,1}.Además, como para cada k = 0, . . . ,m − 1, las funciones zm,1, . . . , zm−k,1 son linealmenteindependientes resulta que x1, . . . , xk+1 son asimismo linealmente independientes. En defini-tiva,
si λ ∈ R satisface que p(λ) = 0 y tiene a m ≥ 1 como multiplicidad, entonces
etλ, tetλ, . . . , tm−1etλ,
son soluciones linealmente independientes de la EDO (5.16).
(5.23)
Supongamos que a + ib con a, b ∈ R y b 6= 0 satisface que p(a + ib) = 0 y tiene a m ≥ 1como multiplicidad. Consideremos también {v1, w1, . . . , vm, wm} los vectores de la base deJordan determinados por a + i b. En estas circunstancias, sabemos que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

150 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Avk = avk − bwk + vk+1, Awk = bvk + awk + wk+1, para cada k = 1, . . . , m− 1,
Avm = avm − bwm y Awm = bvm + awm, ya que A(vm + iwm) = (a + i b)(vm + iwm)
lo que implica que las funciones
φk(t) = eta
[cos(tb)vk − sen(tb)wk + · · ·+ tm−k
(m− k)!
(cos(tb)vk − sen(tb)wk
)],
ψk(t) = eta
[sen(tb)vk + cos(tb)wk + · · ·+ tm−k
(m− k)!
(sen(tb)vk + cos(tb)wk
)],
(5.24)
donde k = 1, . . . , m, son un sistema de soluciones linealmente independientes del sistemaz′(t) = Az(t). Aplicando la equivalencia entre las soluciones de este sistema y las de laEDO (5.16), resulta que si para cada k = 1, . . . , m, denotamos por vk,1 y wk,1 a la primeracomponente de los vectores vk y wk, respectivamente y por φk,1 y ψk,1 a la primera componentede las funciones φk y ψk,1, entonces
φk,1(t) = eta
[cos(tb)vk,1 − sen(tb)wk,1 + · · ·+ tm−k
(m− k)!
(cos(tb)vk,1 − sen(tb)wk,1
)],
ψk,1(t) = eta
[sen(tb)vk,1 + cos(tb)wk,1 + · · ·+ tm−k
(m− k)!
(sen(tb)vk,1 + cos(tb)wk,1
)],
son un sistema de soluciones linealmente independientes de (5.16).
Por otra parte, vm + iwm = (vm,1 + iwm,1)(1, a+ i b, . . . , (a+ i b)n−1
)T , lo que implica quevm,1, wk,1 6= 0, puesto que vm, wm 6= 0. Resulta entonces que
φm,1(t) = eta(cos(tb)vk,1 − sen(tb)wk,1
)y ψm,1(t) = eta
(sen(tb)vk,1 + cos(tb)wk,1
)
son soluciones linealmente independientes de la EDO (5.16). Como ésta es lineal, las funciones
ym(t) =vk,1
v2m,1 + w2
m,1
φm,1(t) +wk,1
v2m,1 + w2
m,1
ψm,1(t) = etacos(tb)
zm(t) =vk,1
v2m,1 + w2
m,1
ψm,1(t)− wk,1
v2m,1 + w2
m,1
φm,1(t) = eta sen(tb)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales con coeficientes constantes 151
son soluciones linealmente independientes de la EDO puesto que sg{φm,1, ψm,1} = sg{ym, zm}.Procediendo de manera análoga al caso de las raíces reales de p, resulta que
si a + i b ∈ C con a, b ∈ R y b 6= 0 satisface que p(a + i b) = 0 y tiene a m ≥ 1como multiplicidad, entonces
eta sen(tb), etacos(tb), teta sen(tb), tetacos(tb), . . . , tm−1eta sen(tb), tm−1etacos(tb)
son soluciones linealmente independientes de la EDO (5.16).
(5.25)
En definitiva, los resultados (5.23) y (5.25) permite obtener una base de soluciones de lasecuaciones homogéneas con coeficientes constantes
Sean n ∈ N∗, ak ∈ R, k = 1, . . . , n, la EDO lineal con coeficientes constantesxn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0, p(x) = xn + anxn−1 + · · · + an su
polinomio característico y supongamos que
p(x) =r∏
j=1
(x− λj)mj ·
s∏i=1
(x2 − 2aix + a2i + b2
i )ni ,
donde λj ∈ R, mj ≥ 1, j = 1, . . . , r, ai, bi ∈ R con bi 6= 0, ni ≥ 1, i = 1, . . . , s.Entonces, las funciones
eλjt, t eλjt, . . . , tmj−1eλjt, j = 1, . . . , r
eajtcos(bjt), . . . , tnj−1eajtcos(bjt), j = 1, . . . , s
eajt sen(bjt), . . . , tnj−1eajt sen(bjt), j = 1, . . . , s
son una base de soluciones de la EDO.
(5.26)
En el resultado anterior, debe entenderse que r puede ser nulo, en cuyo caso p no tieneraíces reales y por tanto n ha de ser par, y también que s podría ser nulo, en cuyo caso psólo tendrá raíces reales. Es claro que si r = 0, entonces la base del espacio de solucionesde la EDO homogénea (5.16) obtenida en (5.26) sólo está formado por funciones del tipotkeat sen(tb) ó tkeatcos(tb), mientras que si s = 0, dicha base contiene sólo funciones de laforma tketλ.
Si ahora, dados t0 ∈ R y x0, . . . , xn−1 ∈ R queremos determinar la única solución delproblema de valores iniciales,
xn)(t) + a1xn−1)(t) + · · ·+ anx(t) = 0, x(t0) = x0, . . . , x
n−1)(t0) = xn−1,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

152 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
basta considerar una combinación lineal arbitraria de las funciones obtenidas en (5.26)e imponer las n-condiciones iniciales descritas. Esto requiere evaluar las funciones tketλ,tkeat sen(tb) y tketacos(tb) y de sus sucesivas derivadas hasta el orden n − 1 en el punto t0y resolver el sistema lineal al que da lugar la verificación de las condiciones iniciales. Comopuede comprobarse la evaluación tanto de las funciones como de sus derivadas sucesivas en t0es, en general, costoso. Sin embargo, en lugar de realizar todo este proceso, podemos utilizaralgunas propiedades adicionales que no han sido tenidas en cuenta.
Concretamente, como la EDO lineal y homogénea anterior tiene coeficientes constantes esfácil comprobar que si x es una solución entonces para cada h ∈ R la función y(t) = x(t−h)es también solución de la EDO, puesto que yk(t) = xk)(t−h) para cada t ∈ R. Aplicando estapropiedad resulta que la única solución del anterior problema de valores iniciales se expresade la forma x(t) = y(t− t0), donde y es la única solución del problema de valores iniciales
yn)(t) + a1yn−1)(t) + · · ·+ any(t) = 0, y(0) = x0, . . . , y
n−1)(0) = xn−1.
Esta descripción tiene la ventaja de que la evaluación de las funciones tketλ, tkeat sen(tb)y tketacos(tb)y de sus sucesivas derivadas hasta el orden n − 1 en el punto 0 es mucho más
sencillo. Por ejemplo,(tketλ
)j)(0) = 0 si j < k, mientras que
(tketλ
)j)(0) =
j!
(j − k)!λj−k si
j ≥ k.
El mismo razonamiento lo podemos emplear para determinar la función de Green paraecuaciones lineales con coeficientes constantes. Recordemos que dicha función está caracter-izada por (5.14) que establece que para cada s ∈ R fijado la función xs(t) = g(t, s) es laúnica solución del problema de valores iniciales
xn)(t) + a1xn−1)(t) + · · ·+ anx(t) = 0, x(s) = · · · = xn−2)(s) = 0, xn−1)(s) = 1.
Aplicando nuevamente la propiedad anterior de las EDO con coeficientes constantes,obtenemos que g(t, s) = α(t − s), donde α es la única solución del problema de valoresiniciales
xn)(t) + a1xn−1)(t) + · · ·+ anx(t) = 0, x(0) = · · · = xn−2)(0) = 0, xn−1)(0) = 1.
En definitiva, hemos probado los siguientes resultados, que además permiten una rees-
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Estabilidad de las ecuaciones lineales de orden superior 153
critura de la Fórmula de Green-Lagrange para las EDO con coeficientes constantes:
Fijados n ∈ N∗ y ak ∈ R, k = 1, . . . , n, la función de Green de la EDO linealcon coeficientes constantes xn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0, estádeterminada por la identidad g(t, s) = α(t− s), para cada t, s ∈ R, donde α es laúnica solución del problema de valores iniciales
xn)(t)+a1xn−1)(t)+· · ·+anx(t) = 0, x(0) = · · · = xn−2)(0) = 0, xn−1)(0) = 1.
Además, fijados x0, . . . , xn−1 ∈ R, si y es la única solución del problema de valoresiniciales
yn)(t) + a1yn−1)(t) + · · ·+ any(t) = 0, y(0) = x0, . . . , y
n−1)(0) = xn−1,
entonces, para cada t0 ∈ R y cada f ∈ C(R), la función
x(t) = y(t− t0) +
∫ t
t0
α(t− s) f(s) ds, t ∈ R,
es la única solución del problema de valores iniciales
xn)(t) + a1xn−1)(t) + · · ·+ anx(t) = f(t), x(t0) = x0, . . . , x
n−1)(t0) = xn−1.
(5.27)
5.5. Estabilidad de las ecuaciones lineales
En esta sección nos preocuparemos de las mismas cuestiones que en la sección del mismonombre referida a los sistemas lineales. Una solución de la ecuación lineal correpondientea los datos anteriores, es decir xn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = f(t), es estable,
asintóticamente estable o inestable si y sólo si la función z(t) =(x(t), . . . , xn−1)(t)
)T
es solu-ción estable, asintóticamente estable o inestable del sistema z′(t) = A(t)z(t) + f ∗(t), donde
A(t) =
0 1 · · · 0
...... . . . ...
0 0 · · · 1
−an(t) −an−1(t) · · · −a1(t)
y f ∗(t) =
0...0
f(t)
.
Como el sistema homogéneo z′(t) = A(t)z(t) es equivalente a la ecuación homogéneaxn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0, de los resultados de la Sección (3.5), obtenemos
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
154 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
inmediatamente que
Una solución de la ecuación lineal xn)(t) + a1(t)xn−1)(t) + · · ·+ an(t)x(t) = f(t)
es estable, asintóticamente estable o inestable si y sólo si todas las solucionesson estables, asintóticamente estables o inestables, respectivamente y además lacondición necesaria y suficiente para que esto ocurra es que la solución nula dela ecuación homogénea asociada xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0 seaestable, asintóticamente estable o inestable, respectivamente.
(5.28)
Nuevamente, y al igual que en el caso de sistemas lineales, el que todas las solucionesde una EDO lineal presenten el mismo tipo de comportamiento en cuanto a la estabilidad,justifica que
la ecuación xn)(t) + a1(t)xn−1)(t) + · · · + an(t)x(t) = f(t) se denomina estable,
asintóticamente estable o inestable si la solución nula de la ecuación homogéneaxn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0 es estable, asintóticamente estable oinestable, respectivamente.
(5.29)
Finalmente, la caracterización 3.34 de la estabilidad del sistema lineal equivalente a laecuación determina la siguiente caracterización de la estabilidad para las ecuaciones lineales:
La ecuación xn)(t) + a1(t)xn−1)(t) + · · · + an(t)x(t) = f(t) es estable o asin-
tóticamente estable si y sólo si para cada t0 ∈ I si x es cualquier solución de laecuación homogénea xn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0, entonces paracada j = 1, . . . , n− 1 la función xj)(t) está acotada para t ≥ t0 o satisfacen quelım
t→+∞xj)(t) = 0, respectivamente.
En particular, para que cada solución tenga uno de los dos comportamientos esnecesario y suficiente que lo tenga cada función perteneciente a una base de solu-ciones de la ecuación homogénea.
(5.30)
5.5.1. Estabilidad de las ecuaciones con coeficientes constantes
En el caso particular de las ecuaciones lineales de orden superior y con coeficientes con-stantes conocemos explícitamente una base de soluciones que está determinada por los cerosdel polinomio característico de la ecuación. Recordemos que (5.26) determina que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Estabilidad de las ecuaciones lineales de orden superior 155
Dados n ∈ N∗, ak ∈ R, k = 1, . . . , n, la EDO lineal con coeficientes constantesxn)(t)+a1x
n−1)(t)+· · ·+anx(t) = 0 y p(x) = xn+anxn−1+· · ·+an su polinomiocaracterístico, si se satisface que
p(x) =r∏
j=1
(x− λj)mj ·
s∏i=1
(x2 − 2aix + a2i + b2
i )ni ,
donde λj ∈ R, mj ≥ 1, j = 1, . . . , r, ai, bi ∈ R con bi 6= 0, ni ≥ 1, i = 1, . . . , s,entonces, las funciones
eλjt, t eλjt, . . . , tmj−1eλjt, j = 1, . . . , r
eajtcos(bjt), . . . , tnj−1eajtcos(bjt), j = 1, . . . , s
eajt sen(bjt), . . . , tnj−1eajt sen(bjt), j = 1, . . . , s
son una base de soluciones de la EDO.
A la vista de la anterior base de soluciones de la EDO homogénea, resulta sumamentesencillo aplicar utilizar las caracterizaciones (5.30) para establecer la estabilidad, estabilidadasintótica o inestabilidad de la ecuación.
Si existe j = 1, . . . , r tal que λj > 0, entonces para ningún t0 ∈ R la función eλjt estáacotada para t ≥ t0. Análogamente, si aj > 0 para algún j = 1, . . . , s, entonces para ningúnt0 ∈ R las funciones eajtcos(bjt) y eajt sen(bjt) están acotadas.
Por otra parte, si λj < 0 , j = 1, . . . , r, entonces todas las funciones
eλjt, t eλjt, . . . , tmj−1eλjt
así como sus derivadas sucesivas tienden a 0 cuando t → +∞. Este comportamiento tambiénse satisface cuando aj < 0, j = 1, . . . , s, para las funciones
eajtcos(bjt), eajt sen(bjt), . . . , t
nj−1eajtcos(bjt), tnj−1eajt sen(bjt)
y para sus sucesivas derivadas.
Por último si λj = 0, entonces 1, t, . . . , tmj−1 son soluciones de la ecuación y la únicaposibilidad para que no aparecen funciones no acotadas es que mj = 0, lo que significaque λj tiene multiplicidad algebraica igual a 1, es decir es una raíz simple del polinomiocaracterístico.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

156 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Recapitulando los resultados obtenidos, tenemos las siguientes conclusiones:
Consideremos n ∈ N∗, los escalares a1, . . . , an ∈ R, y la EDO lineal homogéneaxn)(t) + a1x
n−1) + · · ·+ anx(t) = 0.
• La EDO es asintóticamente estable si y sólo si la parte real de todas las raícesde su polinomio característico son estrictamente negativas.
• La EDO es estable si y sólo si la parte real de todas las raíces de su polinomiocaracterístico son negativas y cada raíz con parte real nula es simple.
• La EDO es inestable si y sólo si si y sólo si su polinomio característico tieneo bien una raíz con parte real estrictamente positiva o bien una raíz múltiplecon parte real nula.
(5.31)
Terminaremos la sección, y esta introducción al análisis de la estabilidad de las solucionesde las ecuaciones diferenciales ordinarias, con un criterio negativo de estabilidad, análogo a(4.26), establecido en el caso de sistemas.
Sean n ∈ N∗ y ak ∈ R, k = 1, . . . , n, la EDO xn)(t)+a1xn−1)(t)+· · ·+anx(t) = 0
y p(x) = xm+a1xm−1+· · ·+am su polinomio característico. Si existe j = 1, . . . , m
tal que aj < 0, entonces A es inestable y si existe j = 1, . . . , m tal que aj = 0,entonces A no puede ser asintóticamente estable.
(5.32)
5.6. Ecuaciones lineales no explícitas
En ocasiones resulta necesario trabajar con ecuaciones lineales de orden n que no sonexplícitas, es decir el término que define el orden de le EDO no aparece como expresado entérminos de las derivadas anteriores de la función incógnita, pero que son equivalentes a ecua-ciones explícitas, como ocurre por ejemplo en la denominada ecuación del oscilador armónico
mx′′(t) + kx(t) = f(t), donde m, k > 0.
El objetivo de esta sección es el estudio de los problemas de valores iniciales asociados a
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales no explícitas 157
este tipo de ecuaciones. Las notaciones fundamentales son las siguientes:
• El número natural no nulo n y el intervalo no trivial I ⊂ R.• Término fuerza: f ∈ C(I).
• Coeficiente principal: a0 ∈ C(I) tal que a0(t) 6= 0, para cada t ∈ I.
• Coeficientes: a1, . . . , an ∈ C(I).
(5.33)
Los datos anteriores determinan la EDO lineal no explícita
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = f(t). (5.34)
Por las mismas razones que ya fueron descritas en el estudio de los sistemas de lineales deEDO, que abordamos en los temas anteriores, para describir el conjunto de soluciones de laEDO (5.34) será de gran importancia el análisis de la EDO que tiene los mismos coeficientesy donde el término fuerza es nulo.
Denominamos ecuación homogénea asociada a (5.34) a la EDO lineal de ordenn
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0.(5.35)
Naturalmente estaremos interesados en resolver los problemas de valores iniciales aso-ciados tanto a (5.34) como a su la ecuación homogénea. Recordemos que en este caso unproblema de valores iniciales para (5.1) o para la ecuación homogénea asociada a él, consisteen dados t0 ∈ I y x0, . . . , xn−1 ∈ R, determinar la o las soluciones de (5.34) o de (5.35) quesatisfacen xk)(t0) = xk, para cada k = 0, . . . , n− 1.
Aunque las ecuaciones anteriores (5.34) y (5.35) no verifican las condiciones de la teoríageneral desarrollada en las secciones previas, y por tanto no podemos deducir directamentela existencia y unicidad de las soluciones de cada problema de valores iniciales, podemosobtener todas estas propiedades observando que ambas ecuaciones son equivalentes a otrasexplícitas para las cuales son de aplicación directa los resultados generales. Concretamente,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
158 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
se satisface el siguiente resultado, cuya verificación es inmediata:
Supongamos que n ∈ N∗, I ⊂ R es un intervalo no trivial y consideremosa0, . . . , an ∈ C(I) con a0(t) 6= 0, para cada t ∈ I. Entonces, para cada f ∈ C(I),la función x ∈ Cn(J) es solución de la EDO
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = f(t)
si y sólo si es solución de la EDO
xn)(t) +a1(t)
a0(t)xn−1)(t) + · · ·+ an(t)
a0(t)x(t) =
f(t)
a0(t).
En particular, la EDO a0(t)xn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0 tiene las
mismas soluciones que la EDO xn)(t) +a1(t)
a0(t)xn−1)(t) + · · ·+ an(t)
a0(t)x(t) = 0.
(5.36)
Observar que como a0(t) 6= 0, para cada t ∈ I, entonces las funcionesa1
a0
, . . . ,an
a0
,f
a0
son
todas continuas, por lo que las EDO lineales equivalentes a las no explícitas satisfacen todaslas hipótesis que conducen a los resultados de existencia y unicidad de las soluciones. Portanto, de (5.36) se deduce inmediatamente que
para cada f ∈ C(I), cada problema de valor inicial para la EDO
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = f(t)
son tiene solución única.
(5.37)
De la equivalencia anterior también se deduce un principio de superposición para estetipo de ecuaciones
Principio de superposición para EDO lineales no explícitas
Dados n ∈ N∗ y a0, a1, . . . , an ∈ C(I), el conjunto de soluciones de la EDO lineal ho-mogénea a0(t)x
n)(t) + a1(t)xn−1)(t) + · · · + an(t)x(t) = 0 es un espacio vectorial real
de dimensión n y para cada función continua f ∈ C(I), el conjunto de soluciones de laEDO lineal a0(t)x
n)(t)+a1(t)xn−1)(t)+ · · ·+an(t)x(t) = f(t) tiene estructura de espacio
afín cuya variedad lineal subyacente es el espacio vectorial de soluciones de la ecuaciónhomogénea.
Naturalmente, para obtener una base del espacio de soluciones de la EDO homogénea,basta proceder como en el caso de EDO lineales explícitas y resolver, en el mismo instante t0,
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones lineales no explícitas 159
n problemas de valor inicial cuyos datos están determinados por una base de Rn. De hechose satisface también la siguiente versión del Lema de Abel:
Lema de Abel-Liouville para EDO lineales no explícitas
Fijados n ∈ N∗, I un intervalo no trivial y las funciones a0, a1, . . . , an ∈ C(I), entoncessi x1, . . . , xn son soluciones de la EDO a0(t)x
n)(t)+a1(t)xn−1)(t)+· · ·+an(t)x(t) = 0,
para cada t0 ∈ I se satisface que
w[x1, . . . , xn](t) = w[x1, . . . , xn](t0) e−
∫ t
t0
a1(s)
a0(s)ds
, para cada t ∈ I.
Además, {x1, . . . , xn} son base del espacio de soluciones de la EDO homogénea si ysólo si existe t0 ∈ I tal que w[x1, . . . , xn](t0) 6= 0 o, de forma equivalente, si y sólo siw[x1, . . . , xn](t0) 6= 0, para cada t ∈ I.
Consideremos ahora, t0 ∈ I, x0, . . . , xn−1 ∈ R, f ∈ C(I) y el problema de valores iniciales
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = f(t),
x(t0) = x0, . . . , xn−1)(t0) = xn−1.
De manera análoga al caso de EDO explícitas y teniendo en cuenta la equivalencia (5.36),la Fórmula de Lagrange para EDO explícitas y más concretamente (5.38), la única soluciónde este problema se expresa como superposición de la únicas soluciones de los problemas devalores iniciales
xn)(t) +a1(t)
a0(t)xn−1)(t) + · · ·+ an(t)
a0(t)x(t) = 0, xj)(t0) = xj, j = 0, . . . , n− 1,
xn)(t) +a1(t)
a0(t)xn−1)(t) + · · ·+ an(t)
a0(t)x(t) =
f(t)
a0(t), x(t0) = 0, . . . , xn−1)(t0) = 0.
(5.38)
Como sabemos, la solución del primero de los problemas de valores que puede obtenersea partir de una base de soluciones de la EDO a0(t)x
n)(t)+a1(t)xn−1)(t)+ · · ·+an(t)x(t) = 0.
Por otra parte, si consideramos g ∈ C1(I× I), la función de Green de la EDO lineal explícita
xn)(t) +a1(t)
a0(t)xn−1)(t) + · · · + an(t)
a0(t)x(t) = 0, resulta que la única solución del segundo de
los problemas de valores iniciales anteriores es x(t) =
∫ t
t0
g(t, s)f(s)
a0(s)ds, lo que motiva la
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

160 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
siguiente definición:
Si I ⊂ R es un intervalo no trivial y a0, . . . , an ∈ C(I) con a0(t) 6= 0 paracada t ∈ I, denominamos Función de Green de la EDO
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0,
a g ∈ C(I × I) definida como g(t, s) =g(t, s)
a0(s), para cada t, s ∈ I, donde g
es la función de Green de la EDO
xn)(t) +a1(t)
a0(t)xn−1)(t) + · · ·+ an(t)
a0(t)x(t) = 0.
(5.39)
De la definición anterior, resulta que si g es la función de Green de (5.35), entonces
para cada f ∈ C(I) la función xp(t) =
∫ t
t0
g(t, s) f(s) ds satisface que
xp ∈ Cn(I) y además, xk)p (t0) = 0, para cada k = 0, . . . , n− 1.
(5.40)
De manera análoga al caso de las EDO lineales explícitas, la Función de Green de las EDOlineales no explícitas pueden caracterizarse en términos de los problemas de valor inicial.
Si I ⊂ R es un intervalo no trivial, a0, . . . , an ∈ C(I) con a0(t) 6= 0, paracada t ∈ I y g ∈ C(I × I) es la función de Green de la EDO
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0,
entonces para cada s ∈ I fijado, la función xs : I −→ R definida comoxs(t) = g(t, s) satisface que xs ∈ Cn(I) y está caracterizada como la únicasolución del problema de valores iniciales
a0(t)xn)s (t) + a1(t)x
n−1)s (t) + · · ·+ an(t)xs(t) = 0, para cada t ∈ I,
xs(s) = x′s(s) = · · · = xn−2)s (s) = 0, xn−1)
s (s) =1
a0(s).
(5.41)
5.6.1. Ecuaciones lineales no explícitas con coeficientes constantes
Supongamos que a0, a1, . . . , an ∈ R con a0 6= 0 y consideremos la EDO homogénea concoeficientes constantes
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009
Ecuaciones lineales no explícitas 161
a0xn)(t) + a1x
n−1)(t) + · · ·+ anx(t) = 0,
que, aplicando (5.36) es equivalente a
xn)(t) +a1
a0
xn−1)(t) + · · ·+ an
a0
x(t) = 0.
Para determinar una base de soluciones de la última EDO, es preciso calcular las raícesde su polinomio característico, que en este caso es
q(x) = xn +a1
a0
xn−1 + · · ·+ an
a0
=1
a0
(a0 + xn + a1x
n−1 + · · ·+ an
),
identidad que motiva la siguiente definición:
Dados a0, . . . , an ∈ R con a0 6= 0, denominamos polinomio característico de laEDO a0x
n)(t)+a1xn−1)(t)+ · · ·+anx(t) = 0 a p(x) = a0x
n +a1xn−1 + · · ·+an.
(5.42)
Teniendo en cuenta que p(x) = a0q(x), resulta que las raíces del polinomio característicode una EDO lineal no explícita con coeficientes constantes son las mismas, con las mis-mas multiplicidades, que las del polinomio característico de la EDO explícita equivalente.Teniendo en cuenta que ambas ecuaciones tienen las mismas soluciones, resulta que
Si ak ∈ R, k = 0, . . . , n, con a0 6= 0 y suponemos que
p(x) = a0xn + anxn−1 + · · ·+ an = a0
r∏j=1
(x−λj)mj ·
s∏i=1
(x2− 2aix + a2i + b2
i )ni ,
donde λj ∈ R, mj ≥ 1, j = 1, . . . , r, ai, bi ∈ R con bi 6= 0, ni ≥ 1, i = 1, . . . , s,entonces, las funciones
eλjt, t eλjt, . . . , tmj−1eλjt, j = 1, . . . , r
eajtcos(bjt), . . . , tnj−1eajtcos(bjt), j = 1, . . . , s
eajt sen(bjt), . . . , tnj−1eajt sen(bjt), j = 1, . . . , s
son una base de soluciones de la EDO a0xn)(t)+a1(t)x
n−1)(t)+· · ·+an(t)x(t) = 0.
(5.43)
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

162 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Finalmente, el que la ecuación propuesta tenga coeficientes constante implica que esautónoma, de manera que nuevamente la Fórmula de Green-Lagrange puede expresarse demanera sencilla:
Fijados n ∈ N∗ y ak ∈ R, k = 0, . . . , n, la función de Green de EDO linealcon coeficientes constantes a0x
n)(t) + a1(t)xn−1)(t) + · · · + an(t)x(t) = 0, está
determinada por la identidad g(t, s) = α(t− s), para cada t, s ∈ R, donde α es laúnica solución del problema de valores iniciales
a0xn)(t)+a1x
n−1)(t)+· · ·+anx(t) = 0, x(0) = · · · = xn−2)(0) = 0, xn−1)(0) =1
a0
.
Además, fijados x0, . . . , xn−1 ∈ R si y es la única solución del problema de valoresiniciales a0y
n)(t)+a1yn−1)(t)+ · · ·+any(t) = 0, y(0) = x0, . . . , y
n−1)(0) = xn−1,entonces, para cada t0 ∈ R y cada f ∈ C(R), la función
x(t) = y(t− t0) +
∫ t
t0
α(t− s) f(s) ds, t ∈ R,
es la única solución del problema de valores iniciales
a0xn)(t) + a1x
n−1)(t) + · · ·+ anx(t) = f(t), x(t0) = x0, . . . , xn−1)(t0) = xn−1.
(5.44)
5.7. Ecuaciones de Euler
Finalizaremos este tema describiendo la solución de una familia importante de ecuacioneslineales, las denominadas Ecuaciones de Euler, que a pesar de no tener coeficientes constantespueden resolverse mediante las técnicas asociadas a este tipo de ecuaciones.
Una ecuación de Euler de orden n es una ecuación diferencial lineal de la forma
a0(a t+b)nxn)(t)+a1(a t+b)n−1xn−1)(t)+· · ·+an−1(a t+b) x(t)+anx(t) = f(t),donde a0, . . . , an, a, b ∈ R satisfacen que a0, a 6= 0.
(5.45)
Observar que si permitiéramos que a = 0, entonces (5.45) sería una ecuación de coefi-cientes constantes no explícita, como las tratadas en la sección anterior.
En la situación de (5.45), el coeficiente principal de la ecuación, es decir a0(a t + b)n seanula para t∗ = − b
a, y por tanto la ecuación es explícita en los intervalos I− = (−∞,− b
a) e
I+ = (− ba, +∞). Así pues, aplicando los resultados generales ya conocidos, concluimos que
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de Euler 163
si f ∈ C(I−), entonces (5.45) tiene soluciones definidas en I−, mientras que si f ∈ C(I+),entonces (5.45) tiene soluciones definidas en I+. Más aún, cada problema de valores inicialesplanteado en I− en el primer caso y en I+ en el segundo, tiene una única solución. Sinembargo, nada puede decirse sobre el comportamiento de las soluciones en el punto − b
a, es
decir la construcción de las soluciones de (5.45) debe investigarse separadamente en cadauno de los dos intervalos. 3
Como (5.45) puede expresarse de manera equivalente en la forma
a0(a t + b)nxn)(t) + a1(a t + b)n−1xn−1)(t) + · · ·+ an−1(a t + b) x(t) + anx(t) = f(t),
donde aj = (−1)n−jaj, j = 0, . . . , n− 1, a = −a y b = −b, podemos suponer, sin pérdida degeneralidad que a > 0. Bajo esta hipótesis, desarrollaremos aquí la metodología para hallarlas soluciones definidas en I+. Una pequeña modificación de las técnicas conducirá a hallarlas soluciones definidas en I−.
Consideremos la aplicación F : R −→ R dada por la expresión F (s) =1
a(es − b). Es
claro que F es derivable y que además F ′(s) = 1aes, de manera que F es estrictamente
creciente y en particular inyectiva. Como lıms→−∞
F (s) = − bay lım
s→+∞F (s) = +∞, resulta que
F : R −→ I+ es un cambio de variable. Obsérvese que si F (s) = t, entonces a t + b = es ypor tanto (a t + b)k = eks para cada k ∈ N.
Si consideramos t = F (s) y definimos y(s) = x(F (s)) = x(t), aplicando la regla de la
cadena resulta que y′(s) = x′(F (s))F ′(s) =es
ax′(F (s)) =
1
a(a t + b) x′(t) y también que
y′′(s) =e2s
a2x′′(t) +
es
ax′(t), es decir y′′(s) =
1
a2(a t + b)2x′′(t) + y′(s). Iterando el proceso
obtenemos que para cada k ∈ N∗
1
ak(a t + b)kxk)(t) = yk)(s) + una combinación lineal de y′(s), . . . , yk−1)(s).
En conclusión, x es solución de (5.45) en el intervalo I+ sii y es solución de una ecuaciónde la forma
ana0 yn)(s)+b1yn−1)(s)+· · ·+bn−1y(s)+bny(s) = f(F (s)), donde b1, . . . , bn ∈ R (5.46)
Por tanto, y es solución de una EDO lineal de orden n cuyos coeficientes son constantes,de manera que puede hallarse con los métodos descritos para este tipo de ecuaciones. Por
3El punto t∗ = − ba suele denominarse punto singular de la EDO. En general se denominan puntos
singulares de una EDO lineal no explícita a los ceros de su coeficiente principal a0. Las ecuaciones de Eulerson por tanto un ejemplo de EDO lineales con puntos singulares, concretamente con un único punto singular.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

164 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
supuesto una vez hallada la solución general de (5.46), la solución general de (5.45) en elintervalo I+, se obtiene mediante la sustitución
x(t) = y(ln (a t + b)
), t > − b
a. (5.47)
5.8. Ejercicios
Problema 1. Hallar todas las soluciones de las siguientes ecuaciones lineales:
x′′′(t) + x′′(t)− 2x′(t) = 0
xiv(t)− 6x′′′(t) + 12x′′(t)− 8x′(t) = 0
xiv(t)− 4x′′′(t) + 14x′′(t)− 20x′(t) + 25x(t) = 0
Problema 2. Consideremos q ∈ C(R) tal que q(t) ≥ 0 para cada t ∈ R. Demostrar quetoda solución de la ecuación u′′(t) − q(t)u(t) = 0 verifica que u(t)u′(t) es una función nodecreciente en R. Concluir que las soluciones no triviales de esta ecuación tienen a lo sumoun cero.
Problema 3. Sean I ⊂ R un intervalo no trivial, a0, a1, a2 ∈ C(I) con a0(t) 6= 0, para cadat ∈ I y {x1, x2} una base de soluciones de la EDO a0(t)x
′′(t) + a1(t)x′(t) + a2(t)x(t) = 0.
Demostrar que la función de Green de la EDO está determinada por la identidad
g(t, s) =x1(s)x2(t)− x2(s)x1(t)
a0(s)w[x1, x2](s)=
x1(s)x2(t)− x2(s)x1(t)
a0(s)(x1(s)x′2(s)− x′1(s)x2(s)
) , para cada t, s ∈ I.
Problema 4. Sean n ∈ N∗, ak ∈ R, k = 1, . . . , n, la EDO lineal con coeficientes constantesxn)(t) + a1(t)x
n−1)(t) + · · · + an(t)x(t) = 0, p(x) = xn + anxn−1 + · · · + an su polinomiocaracterístico y supongamos que
p(x) =r∏
j=1
(x− λj)mj ·
s∏i=1
(x2 − 2aix + a2i + b2
i )ni ,
donde λj ∈ R, mj ≥ 1, j = 1, . . . , r, ai, bi ∈ R con bi 6= 0, ni ≥ 1, i = 1, . . . , s.
Demostrar que para cada t0 ∈ R las funciones
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de Euler 165
eλj(t−t0), (t− t0) eλj(t−t0), . . . , (t− t0)mj−1eλj(t−t0), j = 1, . . . , r
eaj(t−t0)cos(bj(t− t0)
), eaj(t−t0) sen
(bj(t− t0)
),
...
(t− t0)nj−1eaj(t−t0)cos
(bj(t− t0)
), (t− t0)
nj−1eaj(t−t0) sen(bj(t− t0)
), j = 1, . . . , s
son base de soluciones de la EDO.
Problema 5. Consideremos a0, a1, a2 ∈ R con a0 6= 0 y definamos los escalares r =a1
a0
y
ν =1
a0
√|a0a2 − a2
1|.
Demostrar que una base de soluciones de la EDO lineal homogénea de segundo ordencon coeficientes constantes a0x
′′(t) + 2a1x′(t) + a2x(t) = 0 está dada por
{e−rtch(νt), e−rtsh(νt)
}, si a2
1 > a0a2,{e−rt, t e−rt
}, si a2
1 = a0a2,{e−rtcos(νt), e−rt sen(νt)
}, si a2
1 < a0a2,
mientras que la función de Green está dada por
g(t, s) =
1
a0νe−r(t−s)sh
(ν(t− s)
), si a2
1 > a0a2,
1
a0
e−r(t−s)(t− s), si a21 = a0a2,
1
a0νe−rt sen
(ν(t− s)
), si a2
1 < a0a2.
En todos los casos, para cada f ∈ C(R) y cada t0, x0, x1 ∈ R, determinar la única solucióndel problema de valores iniciales
a0x′′(t) + 2a1x
′(t) + a2x(t) = f(t), x(t0) = x0, x′(t0) = x1.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

166 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Problema 6. Se consideran los escalares r, k, ω ∈ R donde k > r2 y ω > 0. Fijadost0, x0, x1 ∈ R, hallar la única solución del problema de valores iniciales
x′′(t) + 2rx′(t) + kx(t) = e−rtsen(ωt), x(t0) = x0, x′(t0) = x1.
Problema 7. Se consideran los escalares b ∈ R y para cada n ∈ N∗ la función fn ∈ C(R),definida como
fn(t) =
0, si t ≤ 0,
n2t, si 0 < t ≤ 1
n,
2n− n2t, si1
n< t ≤ 2
n,
0, si2
n< t.
Para cada x0, x1 ∈ R hallar un, la única solución del problema de valores iniciales
x′′(t) + b2x(t) = fn(t), x(0) = x0, x′(0) = x1.
Calcular también lımn→∞
un(t), para cada t ∈ R.
Problema 8. Consideremos a0, a1 ∈ R con a0 > 0 y el escalar ν =
√2
24
√|a1|a0
. Demostrar
que una base de soluciones de la EDO lineal homogénea de segundo orden con coeficientesconstantes a0x
iv)(t) + a1x(t) = 0 está dada por
{sh(νt) sen(νt), ch(νt) sen(νt), sh(νt) cos(νt), ch(νt) cos(νt)
}, si a1 > 0,{
1, t, t2, t3}, si a1 = 0,{
sen(νt), cos(νt), sh(νt), ch(νt)}, si a1 < 0,
mientras que la función de Green está dada por
g(t, s) =
ν
a1
[ch
(ν(t− s)
)sen
(ν(t− s)
)− sh(ν(t− s)
)cos
(ν(t− s)
)], si a1 > 0,
1
6a0
(t− s)3, si a1 = 0,
2
a1
[sen
(ν(t− s)
)− sh(ν(t− s)
)], si a1 < 0.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de Euler 167
En todos los casos, para cada f ∈ C(R) y cada t0, x0, x1, x2, x3 ∈ R, determinar la únicasolución del problema de valores iniciales
a0xiv)(t) + a1x(t) = f(t), x(t0) = x0, x′(t0) = x1, x′′(t0) = x2, x′′′(t0) = x3.
Especificar también el caso en el que f es constante.
Problema 9. Consideremos a0, a1 ∈ R con a0 > 0 y el escalar ν =
√|a1|a0
. Demostrar
que una base de soluciones de la EDO lineal homogénea de segundo orden con coeficientesconstantes a0x
iv)(t) + a1x′′(t) = 0 está dada por
{1, t, sh(νt), ch(νt)
}, si a1 < 0,
{1, t, t2, t3
}, si a1 = 0,
{1, t, sen(νt), cos(νt)
}, si a1 > 0,
mientras que la función de Green está dada por
g(t, s) =
1
νa1
[ν(t− s)− sh
(ν(t− s)
)], si a1 < 0,
1
6a0
(t− s)3, si a1 = 0,
1
νa1
[ν(t− s)− sen
(ν(t− s)
)], si a1 > 0.
En todos los casos, para cada f ∈ C(R) y cada t0, x0, x1, x2, x3 ∈ R, determinar la únicasolución del problema de valores iniciales
a0xiv)(t) + a1x
′′(t) = f(t), x(t0) = x0, x′(t0) = x1, x′′(t0) = x2, x′′′(t0) = x3.
Especificar también el caso en el que f es constante
Problema 10. Sean a, b ∈ R, I ⊂ R un intervalo y f : I −→ R continua. Resolver laecuación diferencial xiv)(t) + 2ax′′(t) + bx(t) = f(t).
Especificar también el caso en el que f es constante.
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

168 Ecuaciones diferenciales ordinarias. Ecuaciones lineales de orden superior
Problema 11. Dados m, r, k ∈ R con m > 0, determinar las estabilidad, estabilidad asin-tótica o inestabilidad de la EDO mx′′(t) + 2rx′(t) + kx(t) = 0.
Problema 12. Estudiar para los diferentes valores de k ∈ R la estabilidad o estabilidadasintótica de la EDO x′′(t) + kx′(t) + (2k − 1)x(t) = 0.
Problema 13. Consideremos I un intervalo o bien de la forma (a, +∞) o [a, +∞) o bienI = R, las aplicaciones continuas aj : I −→ R, j = 0, . . . , n donde a0(t) > 0 para todo t ∈ Iy la EDO de orden n
a0(t)xn)(t) + a1(t)x
n−1)(t) + · · ·+ an(t)x(t) = 0,
Demostrar las siguientes afirmaciones:
i) Si la ecuación es estable, entonces para cada t0 ∈ I la función∫ t
t0
a1(s)
a0(s)ds está aco-
tada inferiormente en [t0, +∞). Concluir que si existen t0 ∈ I y a > 0 tales quea1(t) ≤ −a a0(t) para cada t ≥ t0, entonces la ecuación es inestable.
ii) Si la ecuación es asintóticamente estable, para cada t0 ∈ I, lımt→+∞
∫ t
t0
a1(s)
a0(s)ds = +∞.
Concluir que si existe t0 ∈ I tal que a1(t) ≤ 0 para cada t ≥ t0, entonces la ecuaciónno es asintóticamente estable.
Problema 14. Dado k ∈ R consideremos la ecuación de Euler homogénea de segundo ordenen el intervalo (0, +∞),
t2x′′(t) + tx′(t) + kx(t) = 0, t > 0.
Demostrar que todas las soluciones de la EDO son de la forma x(t) = y(ln t), dondey ∈ C(R) satisface que y′′(s) + ky(s) = 0, para cada s ∈ R.
Si ν =√|k|, concluir que una base de soluciones de la EDO t2x′′(t) + tx′(t) + kx(t) = 0
en el intervalo (0, +∞), está dada por es
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009

Ecuaciones de Euler 169
{tν ,
1
tν
}ó
{sh(νln t), ch(νln t)
}, si k < 0,
{1, ln t}, si k = 0,{sen(νln t), cos(νln t)
}, si k > 0,
mientras que la función de Green en el intervalo (0, +∞) está dada por
g(t, s) =
1
2sν
[( t
s
)ν
−(s
t
)ν]
=1
sνsh
[νln
( t
s
)], si k < 0,
1
sln
( t
s
), si k = 0,
1
sνsen
[νln
( t
s
)], si k > 0.
En todos los casos, para cada f ∈ C((0, +∞)), cada t0 > 0 y cada x0, x1 ∈ R, determinar
la única solución del problema de valores iniciales
t2x′′(t) + tx′(t) + kx(t) = f(t), t > 0, x(t0) = x0, x′(t0) = x1.
Problema 15. Dados a, b, a0, a1, a2 ∈ R con a > 0 y a0 6= 0, estudiar la estabilidad yestabilidad asintótica de la ecuación de Euler a0(at + b)2x′′(t) + a1(at + b)x′(t) + a2x(t) = 0en el intervalo (− b
a, +∞).
c© Carmona, Á. & Encinas, A.M. Ampliació de Matemàtiques. ETSECCPB, 2009