全方向車輪を用いた 全方向移動ロボットの機能...1 全方向車輪を用いた...
TRANSCRIPT
1
全方向車輪を用いた全方向移動ロボットの機能
山形大学 大学院理工学研究科
機械システム工学分野助教 多田隈 理一郎

2
研究背景
1. 人間の生活空間で移動・作業できる次世代ロボットの開発の進展
2. 次世代ロボットの移動や高齢者・身体障害者用のパーソナルモビリティの開発の必要性の高まり
3. あらゆる方向に、切り返しのための場所と時間を必要としない移動ロボットの開発が望まれている

3
スウェーデン メカナム社 メカナム車輪(1980)
岡山大 永谷ら (2000)
利用
オムニα
利用
従来の全方向ホロノミック車両とそれに使用された車輪
PPRK (CMU) 理研 浅間ら (1996) 松下電工
デリカートロイヤル

4
従来の全方向ホロノミック車両とそれに使用された車輪
これらの機構は車高を高くしてしまう。移動プラットフォームは薄けれ
ば薄いほどよい。
車高の低い全方向ホロノミック車両を開発
利用

5
はじめに、複数のフリーの小車輪が放射状に配置され
た全方向車輪を傾けることが考えられた。
車体を地面に近づけるための機構上の工夫

6
先行研究
Veterans Administration Prosthetic Center (New York, USA 1981)
全方向移動のできる電動車椅子であり、車輪にローラタイプの
ものを4個使用し、大きさ46cm×46cm、直立型、上下用にシリン
ダが付いており、操作はジョイスティックにて行う。なお、モータは
プリントモータを使用。

7
地面
しかしながら、この機構には問題がある。
接地点
車体の底面

8
車体の方向
摩擦抵抗 接地点
摩擦力が車体の運動を妨げてしまう。

9
フリーのジョイント 小車輪 小車輪の偏心軸
下部の回転フレーム上部の回転フレーム
接地点
X
X全方向車輪Omni-Discの原理

10
上部の回転フレーム傾けられた支持板
下部の回転フレーム地面
X
X
全方向車輪Omni-Discの側面図

11
小車輪
偏心した第1の支持軸
上部の回転フレーム
第2の支持軸
穴
Omni-Discにおける小車輪の方向の拘束

12
能動型Omni-Discの底面DCモータ
推力の方向
小車輪
下部の回転フレーム(サスペンション)
ギヤボックス
上部の回転フレーム
(平歯車)
13
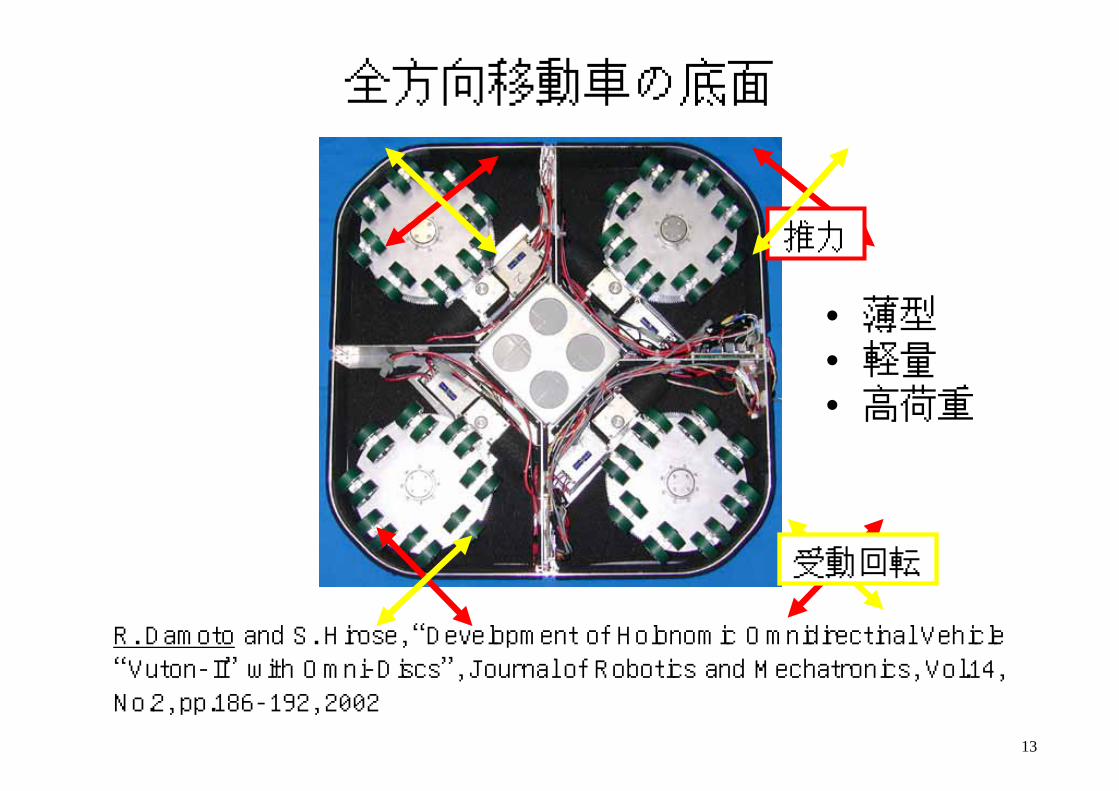
全方向移動車の底面
R. Damoto and S. Hirose, “Development of Holonomic Omnidirectinal Vehicle “Vuton-II” with Omni-Discs”, Journal of Robotics and Mechatronics, Vol.14, No.2, pp.186-192, 2002
• 薄型• 軽量• 高荷重
推力
受動回転

14
v(vX’,vY’)
X’
Y’v2
v1
v3
v4⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡⋅
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ω'
'
4
3
2
1
0110
0110
Y
X
vv
rrrr
vvvv
機体座標系における全方向移動車の制御
r
Omni-Disc
O’
ω

15XO
Y
X’
Y’
r
v(vX,vY)
v1v2
v3
v4
θ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡⋅
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ωθθθθθθθθ
Y
X
vv
rrrr
vvvv
sincoscossinsincos
cossin
4
3
2
1
ω
絶対座標系における全方向移動車の制御
O’

16
パーソナルモビリティとしての応用例

17
東京大学で使用された例
人型ロボットの移動機構として利用東京大学稲葉研究室提供

18
筑波大学で使用された例
全方向歩行感覚提示装置「ロボットタイル」筑波大学岩田研究室提供

19
想定される他の応用例
倉庫の中に荷物を収納するフォークリフト
工場や倉庫の中で製品を運ぶ自動搬送車
病院や介護施設での配膳車

20
工場や病院などで働くロボットの移動機構
ステージの上でのカメラの移動、舞台装置の搬送用台車
想定される他の応用例

21
段差乗り越えが可能な全方向車両の試作機

22
想定される業界
• 利用者・対象1. 移動作業ロボットや掃除ロボットの移動プラットフォーム
2. 電動車椅子
3. バーチャルリアリティ機器の移動感覚提示装置
23
本技術に関する知的財産権
• 発明の名称 :全方向車輪および移動車輪• 出願番号 :特願2000-367791号
特開2002-127931号• 出願人 :東京工業大学
• 発明者 :広瀬茂男,多田隈理一郎