escuela politÉcnica nacional · 2019. 4. 7. · espectros de oleaje obtenidos por el instrumento...
TRANSCRIPT

ESCUELA POLITÉCNICA
NACIONAL
FACULTAD DE INGENIERÍA MECÁNICA
DESARROLLO DE UN ALGORITMO HÍBRIDO (FÍSICO-ESTADÍSTICO) PARA EL POST-PROCESAMIENTO DE
OBSERVACIONES DE ESPECTROS DE OLEAJE OBTENIDOS POR EL INSTRUMENTO SAR (SYNTHETIC APERTURE RADAR)
DEL SATÉLITE ENVISAT EN EL OCÉANO PACÍFICO
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECÁNICO
CRISTHIAN ANDRES VALLADARES PORTILLA
DIRECTOR: Ing. SEGUNDO JESÚS PORTILLA YANDÚN, PhD.
Quito, enero 2018

i
CERTIFICACIÓN
Certifico que el presente trabajo fue desarrollado por Cristhian Andres Valladares
Portilla, bajo mi supervisión.
_____________________
Ing. Jesús Portilla, PhD.
DIRECTOR DE PROYECTO

ii
DECLARACIÓN
Yo, Cristhian Andres Valladares Portilla, declaro bajo juramento que el trabajo aquí
descrito es de mi autoría; que no ha sido previamente presentado para ningún grado o
calificación profesional; y, que he consultado las referencias bibliográficas que se
incluyen en este documento.
A través de la presente declaración cedo mis derechos de propiedad intelectual
correspondiente a este trabajo, a la Escuela Politécnica Nacional, según lo establecido
por la Ley de Propiedad Intelectual, por su Reglamento y por la normativa institucional
vigente.
_____________________
Cristhian Andres Valladares Portilla

iii
DEDICATORIA
Al Supremo Creador
por ser mi luz y mostrarme que la grandeza
se abraza de la humildad y voluntad.
A mi madre
por ser ejemplo de entereza y tenacidad,
y por su amor incondicional que siempre me guía.
A mi padre y mis hermanos
por las palabras de aliento
y el apoyo brindado.
“El pasado es arcilla que el presente labra a su antojo. Interminablemente.”
Jorge Luis Borges

iv
AGRADECIMIENTO
Un complacido agradecimiento
a los profesores de la Escuela Politécnica Nacional
que ven en la enseñanza
la puerta para construir un mejor futuro.
A mi segunda familia, mis amigos,
por compartir esta grata experiencia de educación
y formar conmigo maravillosos recuerdos.

v
ÍNDICE
CERTIFICACIÓN ........................................................................................................... i
DECLARACIÓN ........................................................................................................... ii
DEDICATORIA ............................................................................................................ iii
AGRADECIMIENTO .................................................................................................... iv
ÍNDICE ......................................................................................................................... v
RESUMEN ................................................................................................................. viii
ABSTRACT ................................................................................................................. ix
GLOSARIO DE TÉRMINOS ......................................................................................... x
INTRODUCCIÓN .......................................................................................................... 1
Pregunta de Investigación ............................................................................................ 2
Objetivo general ............................................................................................................ 2
Objetivos específicos .................................................................................................... 2
Alcance ......................................................................................................................... 3
1. REVISIÓN BIBLIOGRÁFICA ............................................................................. 4
1.1. Espectros de oleaje ............................................................................................ 4
1.1.1. Espectro frecuencia-dirección ......................................................................... 7
1.1.2. Dominio Espectral........................................................................................... 8
1.1.3. Interpretación física del espectro de oleaje ..................................................... 9
1.2. Radar de Apertura Sintética (SAR) ................................................................... 10
1.2.1. Resolución espacial de los radares SAR y RAR ........................................... 11
1.2.2. Observación de oleaje con el instrumento SAR ............................................ 12
1.2.3. Procesos de modulación de la señal recuperada .......................................... 13
1.3. Estimación de espectros SAR a partir de imagettes ......................................... 15
1.4. Problemas con los espectros SAR ................................................................... 16
1.4.1. Ambigüedad Direccional ............................................................................... 16
1.4.2. Ruido ............................................................................................................ 17
1.4.3. Azimuth cut-off .............................................................................................. 17

vi
1.4.4. Dirección relativa oleaje-satélite ................................................................... 17
1.5. Estado del arte en post-procesamiento de imágenes SAR ............................... 18
1.5.1. First Guess Inversion .................................................................................... 18
1.5.2. Image Cross Spectra Inversion ..................................................................... 18
2. METODOLOGÍA .............................................................................................. 19
2.1. Herramientas para el post-procesamiento de espectros SAR .......................... 19
2.1.1. Esquema de particionamiento ...................................................................... 19
2.1.2. Estadísticas espectrales de oleaje ................................................................ 22
2.2. Conversión de archivos .................................................................................... 24
2.2.1. Descripción de la base de datos EnviSat ...................................................... 24
2.2.2. Secuencia de conversión .............................................................................. 25
2.2.3. Decodificación de archivos N1 a NetCDF ..................................................... 25
2.2.4. Decodificación de archivos NETCDF a MAT ................................................. 26
2.3. Diseño del algoritmo de post-procesamiento de espectros............................... 30
2.3.1. Reducción de ruido ....................................................................................... 30
2.3.2. Desambiguación ........................................................................................... 34
2.3.3. Calidad del proceso de desambiguación (Quality flags) ................................ 38
2.3.4. Script “disambiguation_v0” ........................................................................... 39
2.4. Procesamiento automático ............................................................................... 40
2.4.1. Estructura de carpetas y secuencia de procesos .......................................... 41
2.4.2. Conversión automática de archivos N1 a NetCDF ........................................ 41
2.4.3. Conversión automática de archivos NetCDF a MAT ..................................... 42
2.4.4. Verificación y Actualización del algoritmo de post-procesamiento ................ 43
2.5. Comparación .................................................................................................... 44
2.5.1. Espectros GlobWave .................................................................................... 44
2.5.2. Quality flags GlobWave ................................................................................ 45
3. RESULTADOS Y DISCUSIÓN ........................................................................ 46
3.1. Evaluación de la reducción de ruido ................................................................. 46
3.1.1. Resultados de la reducción de ruido ............................................................. 47

vii
3.2. Evaluación y comparación de desambiguación ................................................ 50
3.2.1. Resultados de la desambiguación de espectros ........................................... 51
3.3. Características de la base de datos GlobWave ................................................ 57
3.3.1. Particionamiento GlobWave ......................................................................... 57
3.3.2. Desambiguación GlobWave ......................................................................... 57
3.3.3. Quality flags GlobWave ................................................................................ 58
3.4. Resultados y estadísticas totales ..................................................................... 58
3.4.1. Dirección media de propagación de oleaje ................................................... 58
3.4.2. Estadísticas del track 383 ............................................................................. 59
4. CONCLUSIONES ............................................................................................ 61
Referencias Bibliográficas .......................................................................................... 65
ANEXOS ..................................................................................................................... 68
Anexo I. Espectros del track 383 del satélite EnviSat................................................. 68
Anexo II. Uso del script “disambiguation_v1” ............................................................. 80
Anexo III. Uso del software NEST .............................................................................. 81
Anexo IV. Parámetros de los instrumentos y datos SAR en el satélite EnviSat ........... 83
viii
RESUMEN
En el presente trabajo se describe el desarrollo de un algoritmo de desambiguación de
espectros de oleaje obtenidos por el instrumento SAR (Synthetic Aperture Radar) del
satélite EnviSat en el Océano Pacífico. El objetivo principal es obtener un método
automático de post-procesamiento (algoritmo), que sea capaz de mejorar la calidad de
dichos espectros atacando sus dos problemas principales: la presencia de ruido y la
ambigüedad direccional. Para cumplir este propósito se introduce el uso de estadísticas
espectrales, que permiten el cálculo de la probabilidad de ocurrencia de los sistemas de
oleaje individuales contenidos en los espectros. Además, se hace uso de la técnica de
particionamiento para identificar los sistemas individuales antes mencionados. El
esquema metodológico comprende un proceso iterativo que mejora la calidad de los
espectros usando indicadores multicriterio (físico-estadísticos). Los espectros
resultantes de la base de datos en el Océano Pacífico se comparan con la base de datos
del proyecto GlobWave y con el modelo numérico de predicción (model first guess), con
el propósito de mostrar las mejoras del algoritmo propuesto respecto a la metodología
de procesamiento Image Cross Spectra Inversion. Los resultados presentados
evidencian que la reducción de ruido es significativa y corresponde a más del 75% de
las particiones. Además, la desambiguación se muestra consistente, ya que procesa
cerca del 60% de la energía total de los espectros analizados con la calidad más alta.
Palabras clave: Algoritmo de Desambiguación, Ambigüedad Direccional, Espectro de
Oleaje, Estadísticas espectrales de oleaje, Particionamiento, Ruido.

ix
ABSTRACT
The present document describes the developing of an algorithm for the wave spectra
disambiguation, with data obtained by the synthetic aperture radar instrument of the
ENVISAT on the Pacific Ocean. The main objective is obtaining an automatic post-
processing method capable of enhancing spectra quality by tackling two main problems:
noise presence and directional ambiguity. The methodology purposed introduces the use
of wave spectral statistics from which the occurrence probability of individual wave
systems can be estimated. In addition, partitioning technique is described and used to
identify the wave systems mentioned before. The scheme presented consists of an
iterative processing that improves the spectra quality by using multicriteria physical-
statistical indicators. Solved spectra on the Pacific Ocean are compared with GlobWave
database and model first guess spectra. The results show the advantages of the current
algorithm presented over the image cross spectra methodology used in GlobWave
database. Finally, the statistics of the whole track evidence that noise reduction is
important with more than 75 % of partitions removed as noise. Also, disambiguated
spectra show consistency, since the fact that 60% of the spectral energy is processed
with a high-quality level.
Keywords: Disambiguation Algorithm, Directional ambiguity, Wave Spectrum, Wave Spectral Statistics, Partitioning, Noise.

x
GLOSARIO DE TÉRMINOS
Acrónimos y Abreviaciones
ECMWF European Centre for Medium-Range Weather
ENVISAT ESA’s Environmental Satellite
ESA European Space Agency
MAT extensión de archivo de Matlab.
N1 Nuke Randomic Life Generator (formato de archivo)
NetCDF Network Common Data Form (formato de archivo)
QF Quality Flag: indicador de calidad de desambiguación
SAR Synthetic Aperture Radar
txt Text file
! Frecuencia de las ondas armónicas
"! Amplitud de las ondas armónicas
#($) Elevación de la superficie oceánica
%( ) Espectro de oleaje en una dimensión
&! Número de onda
%( , ') Espectro de oleaje en dos dimensiones
* Velocidad de fase
*+ Velocidad de grupo
- Gravedad
MTF Modulation Transfer Function
RAR Real Aperture Radar
SAR Synthetic Aperture Radar
hydr Hydrodinamic
bunch Velocity bunching
./(&) Espectro SAR en el dominio del número de onda
./(&, ') Espectro SAR en el dominio del número de onda y la dirección
Î/(&, $) Transformada de Fourier de la intensidad de imagen
01 Cantidad de números de onda
02 Cantidad de direcciones
1D Referencia a espectros en una dimensión
2D Referencia a espectros en dos dimensiones
SPDF2D Two dimensional - Spectral Probability Density Function
SPDF2D_M Two dimensional – Monthly Spectral Probability Density Function

xi
Letras Griegas
3! Fase de las ondas armónicas
4 Frecuencia angular
' Dirección de propagación
5 Longitud de onda
6 Desplazamiento
7 Tiempo de covarianza
Ψ Track Heading (dirección de vuelo en ángulo)
Argumentos de Funciones Programadas
spec Espectro de oleaje en matriz de dimensiones 24x36
nang Número de celdas de dirección en la malla espectral
nfre Número de celdas de frecuencia en la malla espectral
npart Número de particiones generadas en el espectro
part Particiones del espectro en matriz de dimensiones 24x36
peaka Índice de dirección del pico de la partición en malla espectral
peakf Índice de frecuencia del pico de la partición en la malla espectral
penergy Vector de energía de las particiones
rsquare Coeficientes de correlación para identificación del ruido
specmod Espectro modificado sin ruido
mask_noise Matriz lógica para filtrar el ruido de los espectros
num_noise Número de particiones luego de aplicar el filtro de ruido

1
DESARROLLO DE UN ALGORITMO HÍBRIDO (FÍSICO-
ESTADÍSTICO) PARA EL POST-PROCESAMIENTO DE
OBSERVACIONES DE ESPECTROS DE OLEAJE OBTENIDOS
POR EL INSTRUMENTO SAR (SYNTHETIC APERTURE RADAR)
DEL SATELITE ENVISAT EN EL OCÉANO PACÍFICO
INTRODUCCIÓN
Los océanos alrededor del mundo son materia de investigación debido a su importancia
en el desarrollo del comercio, transporte marítimo, climatología, obtención de recursos
alimenticios, y más recientemente como fuente renovable de energía. Debido a esto se
han desarrollado varios métodos de medición y caracterización de su dinámica. La
primera técnica de medición fue la estimación directa del estado del océano por
observación, frecuentemente usada por marineros. Luego, junto con el avance de la
tecnología, se desarrollaron técnicas in situ de medición como las boyas oceanográficas,
ubicadas sobre la superficie del océano, o transductores de presión ubicados en el fondo
del océano. (Holthuijsen, 2007)
Las técnicas mencionadas son útiles únicamente en una escala local de medición, sin
embargo, en un contexto global tienen un uso práctico limitado. En contraste, los
métodos de observación remota son una alternativa para ampliar el alcance de las
observaciones, estos cubren extensas zonas de mar abierto en periodos de tiempo
relativamente cortos. El radar de apertura sintética (SAR por sus siglas en inglés), es el
instrumento de medición del oleaje más usado en la actualidad, debido a que es capaz
de proveer imágenes de alta resolución acerca de la superficie del océano en una escala
global y continua. (Hoja, 2004)
Varias misiones satelitales de observación terrestre han sido equipadas con el
instrumento SAR, ej., los satélites europeos ERS-1 ERS-2, EnviSat, y más
recientemente Sentinel 1. La gran capacidad de cobertura de los satélites ha provisto
datos muy valiosos en temas de medioambiente, investigación e ingeniería, sin
embargo, su uso no suele ser directo, y generalmente se necesita de varios pasos de
post-procesamiento para utilizar esta información en una aplicación práctica.
El post-procesamiento de los datos de observación satelital ha presentado varios retos
debido a la complejidad de establecer la relación entre el estado real del oleaje y la

2
imagen obtenida por el instrumento SAR la cual contiene distorsiones no lineales.
Diferentes algoritmos han sido propuestos para la solución de los problemas inherentes
a este método de medición (Engen & Johnsen, 1995; S. Hasselmann et al., 1996;
Schulz-Stellenfleth et al., 2007), sin embargo, los resultados obtenidos hasta ahora no
han sido suficientemente consistentes, especialmente al tratar los problemas de
ambigüedad direccional y ruido.
Esta tesis se concentra en el post-procesamiento de espectros de oleaje obtenidos por
el satélite EnviSat que estuvo en operación desde el año 2002 hasta el año 2012, siendo
uno de los más importantes en observación oceanográfica, orbitando la Tierra más de
50000 veces, con un ciclo de revisita de 35 días. (ESA, 2007)
Pregunta de Investigación
¿Es posible desarrollar un procedimiento automático para el post-procesamiento de
espectros de oleaje satelitales que resuelva los problemas de ruido espectral y
ambigüedad direccional produciendo resultados más consistentes?
Objetivo general
Desarrollar un procedimiento automático (algoritmo) que permita el procesamiento de
los datos de espectro SAR para mejorar su calidad actual.
Objetivos específicos
· Cuantificar la calidad actual de los datos de espectro de otras bases de datos
(GlobWave).
· Evaluar diferentes parámetros estadísticos espectrales que permitan establecer
criterios robustos de desambiguación.
· Determinar las variables físicas y estadísticas dominantes que permitan
distinguir la dirección de desplazamiento del oleaje para el diseño del algoritmo.
· Procesar casos piloto para verificar los parámetros definidos (prueba-error).
· Procesar masivamente la base de datos global completa (SAR-EnviSat) para
cuantificar los resultados (porcentaje de aciertos).

3
Alcance En el presente estudio se busca implementar un algoritmo para el post-procesamiento
de espectros de oleaje observados por el satélite EnviSat. Los espectros resultantes se
analizan en ubicaciones específicas con características complejas para el
procesamiento. Además, se cuantifican los resultados totales en valores porcentuales
que indican la calidad del proceso. La metodología propuesta cubre los siguientes
puntos:
· Se identifican los problemas principales en los espectros de oleaje: ruido
espectral y ambigüedad direccional.
· Se exploran las herramientas de análisis de espectros, estas comprenden la
técnica de partición y las estadísticas espectrales de oleaje.
· Se establecen los procedimientos de conversión de datos y reconstrucción de
espectros en base a la literatura.
· Se establece un mecanismo de reducción de ruido en base a un análisis semi-
empírico.
· Se establece una metodología de desambiguación de espectros en base a un
análisis multicriterio de probabilidades
· Se desarrolla un procedimiento automático para el procesamiento de datos a
gran escala
· Se evalúa los espectros resultantes de acuerdo con las características
climáticas de la ubicación geográfica.

4
1. REVISIÓN BIBLIOGRÁFICA
El oleaje es un fenómeno físico que corresponde al movimiento ondulatorio de la
superficie oceánica, por lo que puede clasificarse en una extensa escala de acuerdo con
el periodo o longitud de onda (figura 1.1). Del origen físico de las olas dependen sus
características, p.ej., las olas más grandes y de mayor periodo son generadas por las
fluctuaciones de baja frecuencia. La marea, que corresponde a olas de un periodo un
tanto menor, es originada por la interacción gravitacional de los océanos con la luna y
el sol. Finalmente, las olas de más frecuencia y menor longitud son las que se originan
por la interacción de la superficie oceánica con el viento. Estas últimas generalmente
son las más difíciles de caracterizar y predecir debido al comportamiento aleatorio del
viento. En este trabajo se analizan las observaciones satelitales de oleaje generado por
viento, siendo muy importantes en estudios climáticos y de prevención de desastres,
entre otros. (Holthuijsen, 2007)
Figura 1.1. Frecuencias y periodos de los movimientos verticales de la superficie oceánica. Fuente: (Holthuijsen, 2007)
1.1. Espectros de oleaje
Existen diferentes variables que se han desarrollado para caracterizar la superficie
oceánica, sin embargo, el espectro de oleaje es la que representa el comportamiento de
la superficie oceánica de una manera más amplia y detallada. Para describir este
fenómeno físico, se asume que la superficie oceánica es un plano, por lo que la
elevación del océano en una ubicación especifica como función del tiempo se puede
definir matemáticamente como una onda armónica. Sin embargo, el estado del océano
real es completamente irregular, por lo que debe ser representado como la sumatoria
5
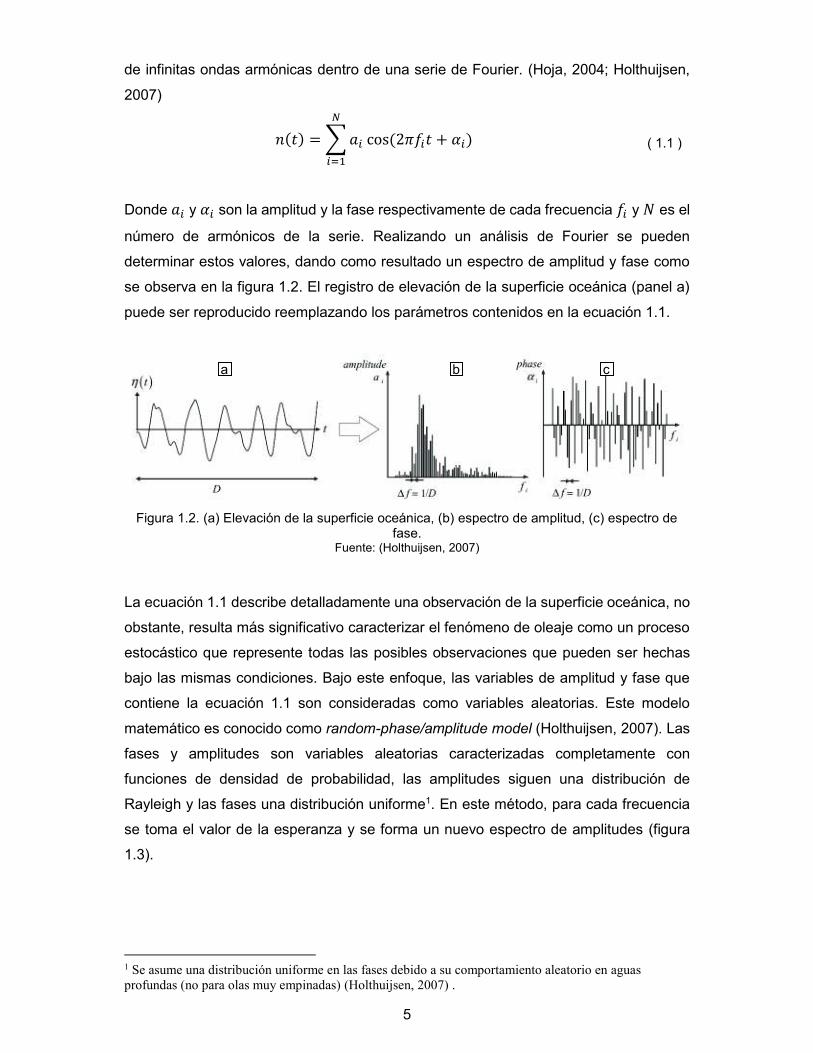
de infinitas ondas armónicas dentro de una serie de Fourier. (Hoja, 2004; Holthuijsen,
2007)
#($) = 9 "! cos (2< !$ + 3!)?!@A
( 1.1 )
Donde "! y 3! son la amplitud y la fase respectivamente de cada frecuencia ! y 0 es el
número de armónicos de la serie. Realizando un análisis de Fourier se pueden
determinar estos valores, dando como resultado un espectro de amplitud y fase como
se observa en la figura 1.2. El registro de elevación de la superficie oceánica (panel a)
puede ser reproducido reemplazando los parámetros contenidos en la ecuación 1.1.
Figura 1.2. (a) Elevación de la superficie oceánica, (b) espectro de amplitud, (c) espectro de fase.
Fuente: (Holthuijsen, 2007)
La ecuación 1.1 describe detalladamente una observación de la superficie oceánica, no
obstante, resulta más significativo caracterizar el fenómeno de oleaje como un proceso
estocástico que represente todas las posibles observaciones que pueden ser hechas
bajo las mismas condiciones. Bajo este enfoque, las variables de amplitud y fase que
contiene la ecuación 1.1 son consideradas como variables aleatorias. Este modelo
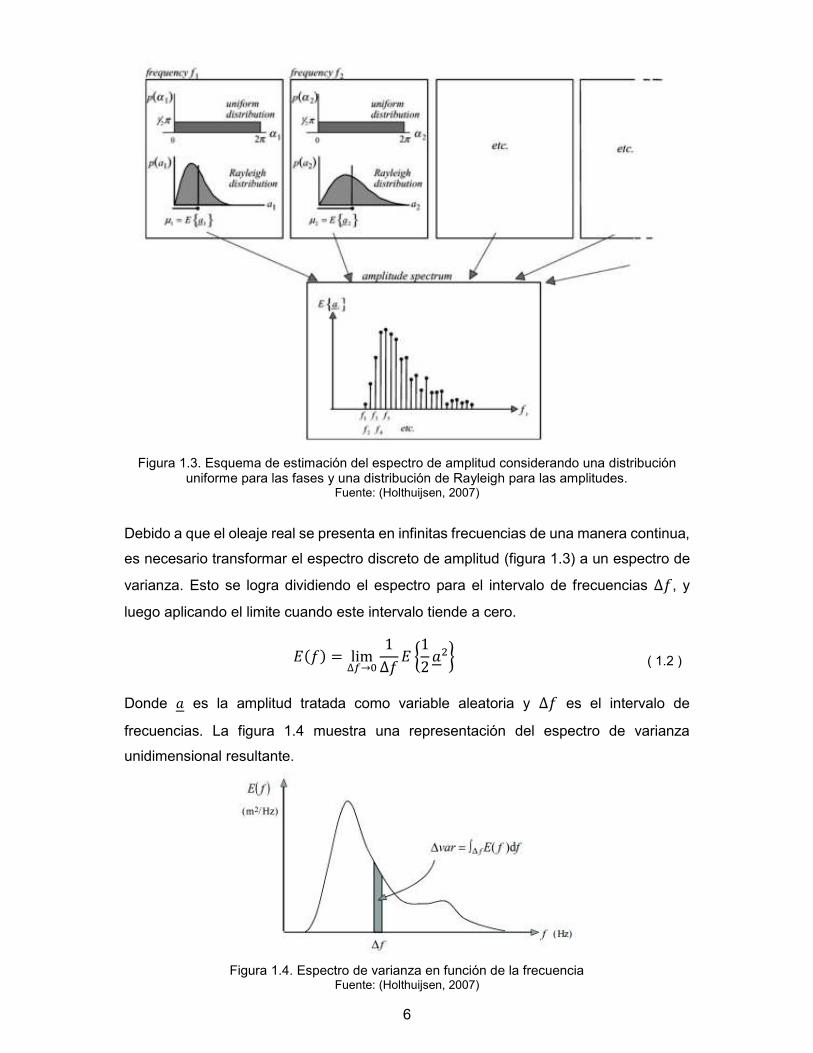
matemático es conocido como random-phase/amplitude model (Holthuijsen, 2007). Las
fases y amplitudes son variables aleatorias caracterizadas completamente con
funciones de densidad de probabilidad, las amplitudes siguen una distribución de
Rayleigh y las fases una distribución uniforme1. En este método, para cada frecuencia
se toma el valor de la esperanza y se forma un nuevo espectro de amplitudes (figura
1.3).
1 Se asume una distribución uniforme en las fases debido a su comportamiento aleatorio en aguas
profundas (no para olas muy empinadas) (Holthuijsen, 2007) .
a b c
6
Figura 1.3. Esquema de estimación del espectro de amplitud considerando una distribución uniforme para las fases y una distribución de Rayleigh para las amplitudes.
Fuente: (Holthuijsen, 2007)
Debido a que el oleaje real se presenta en infinitas frecuencias de una manera continua,
es necesario transformar el espectro discreto de amplitud (figura 1.3) a un espectro de
varianza. Esto se logra dividiendo el espectro para el intervalo de frecuencias ∆ , y
luego aplicando el limite cuando este intervalo tiende a cero.
%( ) = lim∆C→E1∆ % G12 "HI ( 1.2 )
Donde " es la amplitud tratada como variable aleatoria y ∆ es el intervalo de
frecuencias. La figura 1.4 muestra una representación del espectro de varianza
unidimensional resultante.
Figura 1.4. Espectro de varianza en función de la frecuencia Fuente: (Holthuijsen, 2007)

7
1.1.1. Espectro frecuencia-dirección
El espectro mostrado en la sección anterior caracteriza la elevación de la superficie
oceánica en función del tiempo como un proceso Gaussiano estacionario en una
ubicación geográfica específica. No obstante, es necesario añadir otra dimensión para
lograr la representación del oleaje real tridimensional. Debido a esto es necesario
expandir el concepto del modelo random/phase-amplitude, considerando que las ondas
armónicas se propagan en el espacio J, K, con la dirección ' relativa al eje J positivo.
Además, al igual que en el modelo unidimensional, el oleaje se representa por la suma
de las ondas armónicas en una serie de Fourier. (Holthuijsen, 2007)
#(J, K, $) = 9 9 "!,Lcos (4!$ − &!J *NO 'L − &!K OP# 'L + 3!,L)QL@A
?!@A
( 1.3 )
Análogamente al modelo unidimensional, "!,L y 3!,L representan la amplitud y la fase
tratadas como variables aleatorias que siguen una distribución de Rayleigh y una
distribución uniforme respectivamente. El número de onda es representado por & =2</S (donde S es la longitud de la onda armónica). Por lo tanto & *NO' y & OP#'
corresponden a la dirección de propagación de las ondas armónicas en el espacio J, K.
0 y T corresponden al número de armónicos en las dos dimensiones respectivas.
Además, se utiliza la frecuencia angular 4 = 2< para acortar la notación. La figura 1.5
indica de forma esquemática la sumatoria de varias ondas armónicas bidimensionales
para reproducir el estado de la superficie oceánica.
Figura 1.5. Suma de los componentes de onda armónicos bidimensionales, que viajan a lo largo de la superficie oceánica con diferentes periodos, direcciones, amplitudes y fases
Fuente: (Holthuijsen, 2007)

8
Luego de caracterizar las fases y amplitudes estadísticamente con las mismas técnicas
usadas para el espectro unidimensional (figura 1.3), se obtiene el espectro de varianza
bidimensional en términos de la frecuencia y la dirección ' (ecuación 1.4).
%( , ') = lim∆C→E lim∆2→E1∆ ∆' % G12 "HI ( 1.4 )
1.1.2. Dominio Espectral
El espectro de varianza también puede ser expresado en los dominios: frecuencia
angular-dirección, número de onda-dirección, y número de onda en el plano J, K. Para
transformar el espectro de un dominio a otro es necesario establecer una relación entre
el número de onda & y la frecuencia angular 4, la expresión matemática para lograr esto
es extraída del estudio de la dinámica de propagación del oleaje a través de la relación
de dispersión (ecuación 1.5), derivada del modelo linear wave theory2. (Holthuijsen,
2007)
4H = -& tanh (&U) ( 1.5 )
En esta expresión cada número de onda & se relaciona con cada frecuencia angular 4
de manera individual y - representa la aceleración de la gravedad. Debido a que las
observaciones satelitales del oleaje son realizadas en aguas oceánicas, la profundidad
del agua U es mucho más grande que la longitud de onda 5, por lo que la relación de
dispersión puede ser linealizada de la siguiente manera:
U ≫ 5 → &U ≫ 2< → tanh(&U) = 1 → 4H = -& ( 1.6 )
La relación de dispersión (ecuación 1.5) define también la velocidad de fase * como la
velocidad a la que se propaga una fase particular de la onda (p.ej. la cresta), y la
velocidad de grupo *+ como la velocidad de propagación de la energía de la onda
(ecuación 1.6). (Hoja, 2004; Holthuijsen, 2007)
* = 4& = 5& ; *+ = U4U& ( 1.7 )
Luego, usando la aproximación para aguas oceánicas descrita en la ecuación 1.6 se
logra simplificar la ecuación 1.7 en las siguientes expresiones:
* = X-& = -4 ; *+ = -24 = *2 ( 1.8 )
2 El modelo linear wave theory se define completamente en la sección 5.4 de Holthuijsen (2007)

9
Como se puede observar, la relación de dispersión da una descripción detallada de la
propagación de las ondas armónicas en la superficie oceánica. Además, establece una
relación entre el número de onda y la frecuencia, por lo tanto, ahora se pueden
establecer los factores (jacobianos) que relacionan los espectros en sus diferentes
dominios.
%(&, ') = & %Y&Z, &[\ ( 1.9 )
%(4, ') = ] 1*+^ %(&, ') ( 1.10 )
%(4, ') = _ 12<` %( , ') ( 1.11 )
Donde &Z y &[ son los anchos de banda espectrales. Luego, se define el número de
onda como el modulo & = ‖&‖H, y la dirección de propagación como ' =arctan (&[/&Z) para completar los parámetros usados en las ecuaciones anteriores. La
utilidad del cambio de dominios de los espectros de oleaje se muestra en la sección
2.2.4.
1.1.3. Interpretación física del espectro de oleaje
La descripción matemática hecha para los espectros de varianza, corresponde a oleaje
generado por viento. Dentro de esta escala tenemos olas regulares generadas en
lugares distantes que se han propagado fuera del área de influencia del viento que las
genero, estas son llamadas oleaje de fondo o swell. Las olas más irregulares generadas
por vientos dentro del área local son llamadas oleaje de viento o wind sea.
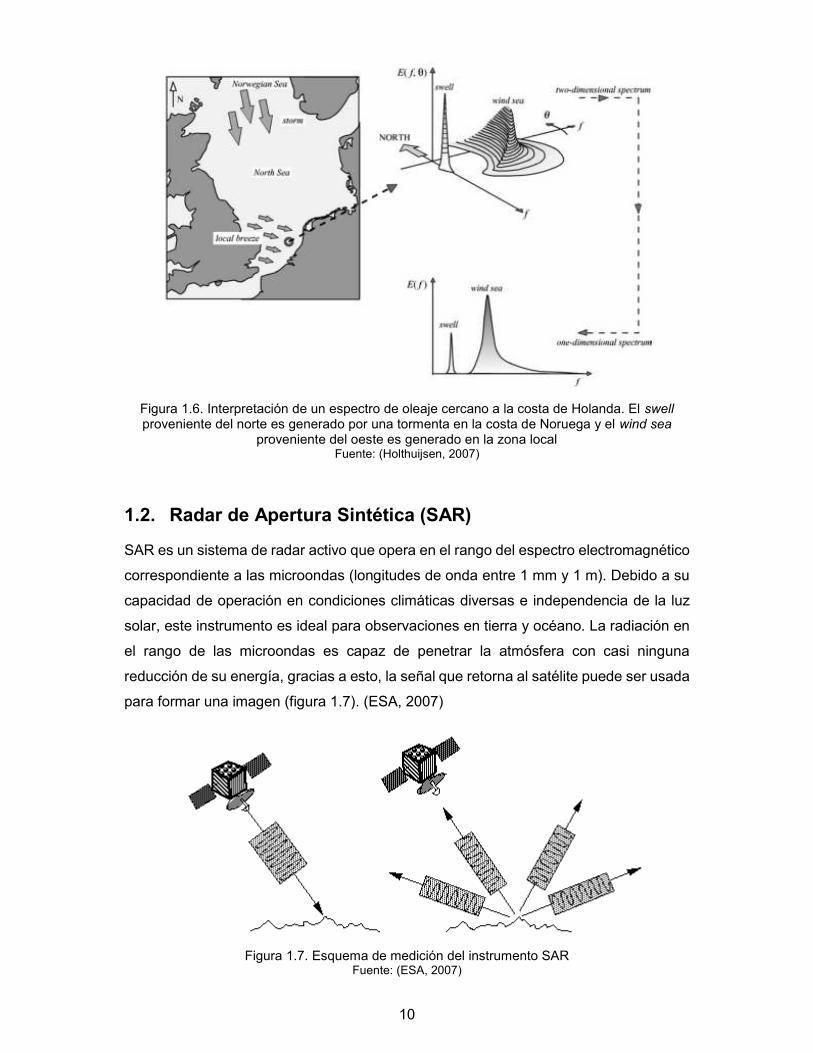
Con el objetivo de comprender el significado físico de los espectros de oleaje, se ilustra
un espectro que contiene oleaje de fondo generado a una gran distancia al norte del
punto analizado, y oleaje de viento generado en el área local y propagándose hacia el
este (figura 1.6). El sistema de referencia en el espectro utiliza la convención náutica,
en la que el oleaje se representa en la dirección de propagación (lado contrario al de la
dirección de origen).
10
Figura 1.6. Interpretación de un espectro de oleaje cercano a la costa de Holanda. El swell proveniente del norte es generado por una tormenta en la costa de Noruega y el wind sea
proveniente del oeste es generado en la zona local Fuente: (Holthuijsen, 2007)
1.2. Radar de Apertura Sintética (SAR)
SAR es un sistema de radar activo que opera en el rango del espectro electromagnético
correspondiente a las microondas (longitudes de onda entre 1 mm y 1 m). Debido a su
capacidad de operación en condiciones climáticas diversas e independencia de la luz
solar, este instrumento es ideal para observaciones en tierra y océano. La radiación en
el rango de las microondas es capaz de penetrar la atmósfera con casi ninguna
reducción de su energía, gracias a esto, la señal que retorna al satélite puede ser usada
para formar una imagen (figura 1.7). (ESA, 2007)
Figura 1.7. Esquema de medición del instrumento SAR Fuente: (ESA, 2007)

11
1.2.1. Resolución espacial de los radares SAR y RAR
Considerando una imagen como un grupo de valores d(J, K), donde la coordenada J
se alinea en la dirección del movimiento del satélite (dirección azimutal) y la coordenada
K se alinea en la dirección de iluminación del satélite (dirección del rango). Los valores
y resolución de K dependen de la longitud del pulso recibido, el tiempo de llegada del
eco y la precisión de sincronización del radar. Por otro lado, los valores y resolución de
J dependen de la posición del satélite y del ancho del haz transmitido por el radar. (ESA,
2007)
Debido a la dependencia de la resolución con el ancho del haz transmitido, existen dos
formas de controlar la resolución en la dirección azimutal: controlando la longitud física
de la antena o sintetizando una longitud efectiva.
Los sistemas en los cuales el ancho del haz transmitido es controlado por la longitud
física de la antena se los conoce como radares de apertura real (RAR), y su resolución
típica observando a una distancia de 1000 km, es 10 km. La ventaja que proporcionan
estos sistemas es que su diseño y procesamiento de datos es relativamente simple, sin
embargo, su resolución restringe a que su uso sea a corto alcance, baja altitud de
operación y longitudes de onda cortas. Estas restricciones causan que: el área de
cobertura sea pequeña, exista más dispersión en la señal recibida debido a la atmósfera,
y en el caso del oleaje, ciertos sistemas de oleaje que se propagan en la dirección
azimutal no sean observados. (ESA, 2007)
El radar de apertura sintética (SAR) mejora la resolución azimutal tomando ventaja del
efecto Doppler en la señal reflejada, este se genera por el movimiento de la antena en
la dirección de vuelo del satélite (dirección azimutal). Usando este efecto se puede
simular una antena de gran tamaño a pesar de que la longitud física de esta sea
pequeña (figura 1.8).
Figura 1.8. Uso del efecto Doppler en el sistema SAR Fuente: (ESA, 2007)

12
1.2.2. Observación de oleaje con el instrumento SAR
El instrumento SAR equipado en el satélite EnviSat, produjo miles de imágenes de la
superficie del océano en una resolución espacial muy alta, logrando observar sistemas
de oleaje propagados en la dirección azimutal que no podían ser vistos con el
instrumento RAR. Sin embargo, se presentaron dos grandes retos en su operación:
lograr cobertura global y la interpretación de las imágenes obtenidas para producir
espectros de oleaje calibrados en dos dimensiones (2D ocean wave spectra). (K
Hasselmann et al., 2012)
El primer problema se debía a que la base de datos que creaba el instrumento SAR era
muy extensa para ser almacenada en el satélite y luego ser transmitida a tierra, esta
dificultad se resolvió transmitiendo directamente los datos a las bases receptoras en
tierra mientras el satélite estaba lo suficientemente cerca de estas. (K Hasselmann et
al., 2012)
Los datos crudos obtenidos por EnviSat consisten en imágenes rectangulares llamadas
imagettes3 con un tamaño de 5x10 km y una separación de 100 km entre cada una,
logrando cobertura global. En la figura 1.9 se puede observar un ejemplo de oleaje
propagándose en la dirección noreste (longitud de onda de alrededor de 300m). Los
patrones de onda observados son inducidos por el oleaje en la ubicación de la captura
de la imagen. Las áreas oscuras en la imagen representan una intensidad baja y las
áreas claras representan una intensidad alta. (ESA, 2007)
Figura 1.9. Imagette adquirida por EnviSat el 1 de enero del 2007; 01:52:24 Fuente: (Wang et al., 2014)
3 El término imagette hace referencia a la diferencia entre el mecanismo de obtención de una imagen
corriente y un espectro SAR.

13
El segundo problema fue encontrar la relación entre el oleaje representado en las
imagettes SAR y el oleaje real presente en el océano, debido a que las imágenes de
radar no son un mapeo directo de la escena capturada desde la superficie oceánica,
sino que son el resultado de una función de transferencia no lineal (modulación) aplicada
sobre la señal recibida y un algoritmo de inversión aplicado sobre las imágenes SAR
moduladas como se indica en Klaus Hasselmann & Hasselmann, 1991 y en Hoja, 2004.
Esto se muestra esquemáticamente en la figura 1.10. El desarrollo de los algoritmos de
inversión conlleva a su vez una serie de problemas que deben ser resueltos
secuencialmente (ver sección 1.4). Esta tesis se enfoca en dos de ellos: ruido espectral
y ambigüedad direccional.
Figura 1.10. Niveles de procesamiento de los productos EnviSat
1.2.3. Procesos de modulación de la señal recuperada
Las imágenes SAR requieren un post-procesamiento, debido a que no son una
representación directa de la superficie oceánica. Para esto existen tres procesos básicos
de modulación (funciones de transferencia): el primero debido a un efecto geométrico
causado por el cambio del ángulo local de incidencia (Tefg!jg), el segundo debido a la
interacción hidrodinámica entre las olas cortas y largas (Tefk[pq), y el tercero debido
al movimiento de las olas y el satélite (Tefuvwxk). Las dos primeras funciones de
transferencia corresponden a procesos lineales, usadas también en los sistemas RAR
(ecuación 1.12). (Klaus Hasselmann & Hasselmann, 1991)
Tefyzy = Tefg!jg + Tefk[pq ( 1.12 )
Para pasar del procesamiento de los sistemas RAR hacia los sistemas SAR, es
necesario tomar en cuenta el tercer proceso de modulación (Tefuvwxk), entrando así
en un proceso altamente no lineal. En contraste con los efectos de las modulaciones
RAR que solo afectan a la intensidad de la imagen, los efectos del movimiento también
afectan la posición y el enfoque del elemento representado en el plano de la imagen.
Este problema se conoce como velocity bunching y afecta principalmente la dirección
azimutal de la imagen, mientras que los efectos de las otras modulaciones crecen en la
dirección del rango como se puede observar en la figura 1.11. (Hoja, 2004)

14
Figura 1.11. Contribuciones de las modulaciones a la función de transferencia Fuente: (Hoja, 2004)
Al incluir los efectos del velocity bunching en la función de transferencia, este proceso
adquiere una característica de mapeo no lineal al relacionar la imagette SAR con el
espectro de oleaje real. La función de transferencia final (ecuación 1.13) muestra que
este es el único efecto que diferencia el mapeo de los radares RAR con el de los radares
SAR. (Engen & Johnsen, 1995; Klaus Hasselmann & Hasselmann, 1991)
Tef{zy = Tefyzy + Tefuvwxk ( 1.13 )
La no linealidad de la función de transferencia (Tefuvwxk) es altamente dependiente de
la dirección de propagación de las olas, es decir, el oleaje que se propaga en la dirección
del rango no se ve afectado por los efectos del movimiento, al contrario del oleaje que
se propaga en la dirección azimutal, que es fuertemente afectado por el movimiento
debido al efecto Doppler. La distorsión en un punto rastreado sobre la superficie
oceánica es mostrada esquemáticamente en la figura 1.12. El radar se mueve con
velocidad |, y el punto rastreado sigue un movimiento ondulatorio representado por la
velocidad angular 4d y la velocidad relativa }q. Este efecto puede observarse para los
casos en los que el satélite se mueve a favor del punto rastreado o en contra. (Hoja,
2004)

15
Figura 1.12. Efectos del velocity bunching sobre un punto rastreado en la superficie oceánica Fuente: (Hoja, 2004)
1.3. Estimación de espectros SAR a partir de imagettes
Los espectros SAR son calculados a partir de las imágenes espectrales (imagettes)
adquiridas por el satélite EnviSat como productos WVI_1P. La idea de este método es
usar dos imágenes adquiridas en dos intervalos de tiempo cercanos y calcular el
espectro a partir de las transformadas de Fourier de cada imagen como muestra la
ecuación 1.14. (Engen & Johnsen, 1995; Husson, 2012)
./(&) = ⟨Î/(&, $)Î/∗(&, $ + 7)⟩ − ��H6(&) ( 1.14 )
Donde:
⟨… ⟩ Denota un promedio conjunto (ensemble average).
./ Espectro SAR en función del número de onda (cross image spectrum).
Î/ Transformada de Fourier de la intensidad de la imagette SAR adquirida.
Î/∗ Conjugada compleja de la transformada de Fourier de la imagette SAR adquirida.
��H Intensidad promedio.
6 Desplazamiento entre las dos imágenes.
& Número de onda.
$ Tiempo.
7 Variación de tiempo entre las dos imágenes.

16
El espectro resultante de las dos imágenes ./(&) (cross spectrum), es una función con
dominio complejo que contiene una parte real simétrica (ecuación 1.15) que provee
información acerca de la intensidad de la imagen espectral, y una parte imaginaria
asimétrica (ecuación 1.16) que provee información acerca de la fase del espectro
causada por el desplazamiento del oleaje entre las dos imágenes originales. (Bao &
Alpers, 1998; Hoja, 2004)
��[./(&)] = ��[./(−&)] ( 1.15 ) ��[./(&)] = −��[./(−&)] ( 1.16 )
Los productos WVS_1P de EnviSat corresponden a los espectros obtenidos por el
método explicado anteriormente trasladados a coordenadas polares ./(&, '), la figura
1.13 es una representación de la parte real (panel a) y la parte imaginaria (panel b) de
un producto WVS_1P luego de la transformación a coordenadas polares, cada celda en
la malla representa una longitud de onda y una dirección de propagación.
Figura 1.13. Espectro WVS1_P de EnviSat en coordenadas polares; (a) parte real, (b) parte
imaginaria Fuente: (Bamler, 2002)
1.4. Problemas con los espectros SAR
Como se explicó en la sección 1.2.3, las imágenes captadas por SAR no tienen una
relación directa con el oleaje observado, debido a esto surgen varios problemas en la
interpretación de los espectros obtenidos, entre los principales descritos en las
siguientes secciones tenemos: dirección ambigua de propagación del oleaje, ruido
espectral, dirección relativa oleaje-satélite.
1.4.1. Ambigüedad Direccional
Uno de los problemas principales en los espectros SAR es la incertidumbre en la
dirección de propagación del oleaje. Este problema se origina por el método de
a b

17
obtención del espectro en el que la parte real del espectro es simétrica (ver sección 1.3),
esto significa que los sistemas de oleaje individuales tienen un par ambiguo
propagándose en la dirección opuesta. Observando el espectro en coordenadas polares
(figura 1.14), podemos verificar que la ambigüedad direccional es de 180°. (Engen &
Johnsen, 1995; Klaus Hasselmann & Hasselmann, 1991; Hoja, 2004)
Figura 1.14. Esquema de la ambigüedad direccional de un espectro SAR
1.4.2. Ruido
En los espectros SAR se observa con mucha frecuencia que existen regiones del
espectro en las cuales la intensidad medida en las imágenes no es homogénea, es decir
que existe un cambio brusco en la intensidad de la imagen. Estos fenómenos son más
usuales bajo condiciones de muy poco viento, efectos de la lluvia y frentes atmosféricos
u oceánicos, todo esto causa una disrupción en la homogeneidad de la imagen que
domina principalmente en las altas frecuencias del espectro (ver sección 2.3.1). (Engen
& Johnsen, 1995; Hoja, 2004; Husson, 2012)
1.4.3. Azimuth cut-off
Como se describió en la sección 1.2.3, existe una degradación en la imagen por el efecto
conocido como Velocity Bunching, lo que causa que las imágenes SAR se muestren
poco claras en la dirección azimutal. En promedio, el azimuth cut-off comienza a afectar
en longitudes de onda menores a 200 m, correspondiente a 0.884 Hz en frecuencia.
Esto quiere decir que los sistemas de oleaje que se propagan en la dirección azimutal
con longitudes de onda por debajo de estos valores no pueden ser correctamente
representados. (Hoja, 2004; Husson, 2012; Stopa et al., 2015)
1.4.4. Dirección relativa oleaje-satélite
Un problema menor en la representación de los espectros es el sistema de referencia
en el cual son tomadas las imágenes SAR, este sistema toma la dirección de vuelo del
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0

18
satélite (azimutal) como eje de referencia y desde ahí mide la dirección de propagación
del oleaje en contra de las manecillas del reloj. Sin embargo, el sistema de referencia
náutico es el más usado y claro. En este la dirección es medida a favor de las manecillas
del reloj con referencia al norte geográfico. A causa de esto los espectros SAR deben
ser rotados dependiendo de la dirección de vuelo del satélite con respecto al norte
geográfico. (ESA, 2007; Hoja, 2004)
1.5. Estado del arte en post-procesamiento de imágenes SAR
En la actualidad existen diferentes metodologías para resolver los problemas descritos
anteriormente, especialmente la ambigüedad direccional y el ruido, estos se conocen
como algoritmos de inversión. A continuación, se describe los dos principales enfoques
usados para desarrollar los algoritmos existentes y sus problemas principales.
1.5.1. First Guess Inversion
Este enfoque descrito por Klaus Hasselmann & Hasselmann (1991) y su nueva versión
en S. Hasselmann et al. (1996), se basa en el uso de una estimación previa del espectro
observado (first guess wave spectra) para la resolución de la ambigüedad direccional y
la reducción de ruido. Estos espectros estimados generalmente son el resultado de
modelos numéricos basados en la interacción viento-oleaje. El principal problema de
este enfoque es que existe una variabilidad de tiempo entre el modelo numérico y el
espectro SAR observado, lo cual puede resultar en una asignación errática de los
sistemas de oleaje.
1.5.2. Image Cross Spectra Inversion
Este nuevo enfoque descrito por Engen & Johnsen (1995) y usado por ESA para obtener
los productos WVW_2P (figura 1.10), presenta una nueva solución al usar la información
de la parte positiva imaginaria de los espectros SAR. La parte imaginaria del espectro
complejo provee información de la dirección de propagación del oleaje debido al
desplazamiento de este entre las dos imágenes tomadas por SAR. El problema de este
método es que, al analizar el espectro completo, pasa por alto a posibles sistemas
individuales verdaderos que se propagan en direcciones opuestas. Además, en muchos
casos la información de la parte imaginaria de los espectros no es suficiente para
realizar la desambiguación como se muestra más adelante en la sección 3.2.1.

19
2. METODOLOGÍA
Luego de haber tomado en cuenta los problemas relacionados con la estimación de
espectros SAR descritos en la sección 1.3, en este trabajo se presenta un nuevo
enfoque para la solución de los problemas principales relacionados con la ambigüedad
direccional y reducción de ruido. La metodología propuesta se basa en dos puntos
principales: el uso de la técnica de partición de espectros y las estadísticas espectrales
de oleaje.
2.1. Herramientas para el post-procesamiento de espectros SAR
2.1.1. Esquema de particionamiento
Los espectros de oleaje describen la distribución de energía a lo largo de un dominio
frecuencia-dirección y son el resultado de la concurrencia de un cierto número de
sistemas de oleaje individuales originados a partir de diferentes eventos meteorológicos.
Generalmente, la información que contiene el espectro es simplificada en parámetros
integrales obtenidos bajo la consideración de un solo sistema de oleaje en todo el
espectro, por lo que, en el caso de concurrir varios sistemas de oleaje, estos parámetros
se vuelven menos significativos. La técnica de partición de espectros es una excelente
herramienta para superar este problema logrando mejorar la caracterización del
espectro a través de los parámetros individuales de los sistemas de oleaje.
Esta técnica ha sido implementada en forma de algoritmo por diferentes autores (p.ej.,
Gerling, 1992; Hanson & Phillips, 2001; S. Hasselmann et al., 1996; Portilla et al., 2009;
Voorrips et al., 1997). Desde su desarrollo conceptual hecho por Gerling (1992), la idea
básica del particionamiento ha sido mantenida. Sin embargo, los resultados difieren
dependiendo de: la resolución, la calidad, y método de obtención del espectro.
2.1.1.1. Descripción
El algoritmo de particionamiento básico consiste en considerar el espectro como una
matriz en la cual las columnas corresponden a la dirección de propagación ' y las filas
a la frecuencia . Luego, se busca a través de la matriz espectral .�( , ') (ver sección
2.2.4.3) y se identifica los caminos de mayor intervalo de ascenso para alcanzar un pico
local de energía, es decir, que se escoge iterativamente el valor más alto entre los ocho
valores que rodean a la celda analizada (arriba, abajo, izquierda, derecha y diagonales).
Todos los caminos que conducen al mismo pico forman una agrupación llamada
partición, el algoritmo es conocido como watershed, haciendo una analogía a las
cuencas hidrográficas (figura 2.1). (Hanson & Phillips, 2001; Portilla et al., 2009)

20
Figura 2.1. Demostración del método de particionamiento espectral
Fuente: (Hanson & Phillips, 2001)
Los problemas más discutidos en la literatura mencionada son: la identificación de los
sistemas de oleaje significativos y la combinación o eliminación de los menos
significativos. Esto se debe a que los espectros pueden tener una variabilidad aleatoria
conocida como ruido, considerando esto, se han desarrollado diversas soluciones a este
problema. La propuesta de Gerling (1992) consiste en considerar como particiones
significativas a las que perduran en el tiempo y espacio, la limitación de este método es
que se necesita otros espectros para evaluar las particiones. Un esquema diferente
desarrollado por S. Hasselmann et al. (1996) evita este problema comparando
características espectrales de las particiones dentro del espectro, sin embargo, los
criterios usados para la combinación de particiones usan parámetros arbitrarios que
deben ser ajustados dependiendo de la situación, lo mismo sucede con los algoritmos
de Hanson & Phillips (2001) y Voorrips et al. (1997) que son aplicaciones específicas
del enfoque de S. Hasselmann et al. (1996). La selección arbitraria de parámetros hace
que el proceso sea menos susceptible de ser automatizado y menos confiable,
especialmente cuando los parámetros no se eligen adecuadamente de acuerdo con la
situación analizada.
El procesamiento usado en este trabajo es el desarrollado por Portilla et al. (2009). En
su base, este esquema no se aleja del algoritmo watershed explicado anteriormente.
Sin embargo, recordando que el problema principal es producir particiones significativas
en situaciones diversas, este algoritmo trata al espectro como una imagen usando un
filtro kernel implementado por Portilla et al., 2009 que reduce la variabilidad aleatoria y

21
permite combinar las particiones menos significativas con las particiones vecinas. Este
proceso puede de ser automatizado con los pasos siguientes:
· El espectro es particionado con el algoritmo watershed.
· Las particiones con baja energía (ver sección 2.3.1.1) son combinadas.
· Si el número de particiones es más grande que el establecido, el espectro es
filtrado, particionado y las particiones con baja energía son combinadas.
· El paso anterior es repetido hasta que el número de particiones se igual o menor
al establecido.
· Las particiones finales de baja energía son combinadas nuevamente.
Podemos ver que, en este esquema la filtración se realiza secuencialmente
dependiendo del nivel de ruido detectado, esto permite que el grado de filtración no sea
excesivo y logre identificar los sistemas poco significativos. La figura 2.2 muestra
esquemáticamente la partición de un espectro tomado de la base de datos de EnviSat,
este es representado matricialmente y en coordenadas polares.
Figura 2.2. Ejemplo del esquema de particionamiento de espectros; a) representación matricial del espectro, b) particiones detectadas representadas matricialmente con colores, c)
representación del espectro en coordenadas polares, d) particiones detectadas representadas en coordenadas polares con línea azul
50 100 150 200 250 300 350
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
direccion [grados]
fre
que
ncia
[H
z]
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
50 100 150 200 250 300 350
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
direccion [grados]
fre
que
ncia
[H
z]
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
ba
c d
350
5
10
15
20
25
30

22
2.1.2. Estadísticas espectrales de oleaje
Las estadísticas espectrales de oleaje constituyen la base del enfoque propuesto en
este trabajo para solucionar el problema de ambigüedad direccional descrito en la
sección 1.4.1. El planteamiento se basa en caracterizar estadísticamente los sistemas
de oleaje obtenidos con la técnica de particionamiento, para obtener la probabilidad del
sistema de ser real o espurio.
En cada sitio específico las estadísticas espectrales son únicas y dependen de muchos
factores meteorológicos y geográficos. La caracterización estadística de los sistemas de
oleaje, en contraste con los modelos numéricos, no es dependiente del tiempo y se
presenta más robusta conforme la base poblacional de la cual es calculada sea más
grande. Esta característica principal provee una ventaja frente a las metodologías de
post-procesamiento de espectros descritas en la sección 1.5. (Portilla et al., 2015)
Conociendo la ventaja descrita, en este trabajo se utiliza como criterio probabilístico
principal la función densidad de probabilidad espectral 2D, denotada como SPDF2D por
sus siglas en inglés (spectral probability density function 2D). La SPDF2D es derivada
usando espectros del ERA-Interim database provistos por el European Center for
Medium-Range Weather Forecasts (ECMWF). (Dee et al., 2011)
2.1.2.1. Función densidad de probabilidad espectral 2D (SPDF2D)
La base de datos del ERA-Interim database es calculada en base a espectros del
modelo numérico WAM que han sido particionados en sus sistemas de oleaje
individuales. Como se vio en la sección 2.1.1, las particiones se encuentran en un
dominio frecuencia-dirección y se forman alrededor de un pico local, la ubicación de
estos picos provee información representativa de la frecuencia y dirección de
propagación de los sistemas de oleaje en los espectros originales. El siguiente paso
consiste en recolectar las posiciones de varios picos dentro de una serie de tiempo de
datos espectrales y contar el número de ocurrencias de estos en cada posición de la
malla frecuencia-dirección. Luego, el número de ocurrencias obtenido es representado
nuevamente en una malla frecuencia-dirección. Esta distribución representa la
información estadística de los sistemas de oleaje de manera análoga a los espectros, y
puede ser analizada con la misma técnica de particionamiento que identifica los
sistemas de oleaje individuales. (Portilla et al., 2015)
Los datos usados para producir estas estadísticas están disponibles en una malla con
resolución espacial de 100 km, cubriendo un periodo de tiempo que va desde 1979 hasta
2015. Estos espectros son recolectados en intervalos regulares de 6 h, haciendo un total

23
de 54056 espectros por cada punto en la malla global lo que representa una población
estadística suficiente para producir una confiabilidad alta en la caracterización de los
sistemas de oleaje (Portilla 2015). Su interpretación es ilustrada en la figura 2.3. En el
panel a) se puede observar que la distribución SPDF2D es análoga a un espectro de
oleaje individual, en donde el color representa el número de ocurrencias para cada punto
de la malla espectral. Aplicando el algoritmo de particionamiento a esta distribución se
puede identificar 6 poblaciones de sistemas de oleaje pertenecientes a cierto patrón de
generación. En el panel b) se puede observar las direcciones de procedencia de estos
sistemas de oleaje.
Figura 2.3. a) Sistemas de oleaje de acuerdo con la función densidad de probabilidad espectral en la ubicación (3.48°N, 81.53°O), b) Caminos recorridos por cada población de los sistemas
de oleaje
La tabla 2.1 presenta un resumen de los sistemas de oleaje observados en la figura 2.3,
junto el número de ocurrencias, frecuencia de los picos y dirección de propagación de
los picos. Tomando como ejemplo el sistema de oleaje 1 podemos observar que este
ha ocurrido 76670 veces en el periodo de tiempo que cubren las estadísticas y se
propaga en la dirección 37.5°.
Tabla 2.1. Resumen de los parámetros de las particiones para el punto (3.48°N, 81.53°O)
Sistema de oleaje
Número de ocurrencias
Frecuencia del pico (Hz)
Dirección del pico (°)
1 76670 0.0673 37.5 2 40788 0.0740 112.5 3 17833 0.1586 7.5 4 11069 0.1745 202.5 5 6257 0.1311 112.5 6 3444 0.1919 82.5 Total 1556061 - -

24
2.2. Conversión de archivos
2.2.1. Descripción de la base de datos EnviSat
El satélite EnviSat (European Environmental Satellite) adquirió una gran cantidad de
datos ambientales enfocados al estudio del clima, calentamiento global, deterioro de la
capa de ozono, y monitoreo de los océanos y glaciares. El instrumento advanced SAR
(ASAR) obtuvo espectros de oleaje en el periodo transcurrido desde el 1 de marzo del
2002 hasta el 9 de mayo del 2012. EnviSat fue el sucesor de las misiones ERS,
mejorando la resolución de los datos obtenidos por misiones anteriores. (ESA, 2007;
Hoja, 2004)
Los espectros de oleaje son adquiridos por EnviSat en Wave Mode4 y son procesados
en distintos niveles de acuerdo con la necesidad del usuario como se muestra a
continuación:
· WVI_1P: Imagettes SLC (Single Look Complex), sin proceso posterior (datos
crudos).
· WVS_1P: Two-dimensional cross spectrum. Espectros ambiguos obtenidos a
partir de los productos WVI_1P con el proceso descrito en la sección 1.5.2.
· WVW_2P: Ocean Wave Spectra. Espectros desambiguos obtenidos a partir de
los productos WVS_1P, aplicando el algoritmo de inversión desarrollado por
Engen (1995) (ver sección 1.5.2).
Los productos WVW_2P corresponden al último nivel de procesamiento proporcionado
por ESA y utilizan el algoritmo de inversión propuesto descrito en la sección 1.5.2 para
la resolución de la ambigüedad direccional y la reducción de ruido. Sin embargo, los
resultados disponibles muestran una calidad de desambiguación deficiente en la
mayoría de los casos como se mostrará más adelante en la sección 3.2.1. Debido a este
problema, y con la intención de tratar los espectros desde su origen, en este trabajo se
escoge la base de datos que contiene los productos WVS_1P, ya que estos son
completamente ambiguos.
Una ventaja adicional de los productos proporcionados por ESA es que son de libre
acceso, por lo que la base de datos EnviSat está disponible en la dirección web:
https://earth.esa.int/web/guest/-/asar-wave-mode-imagette-cross-spectra-1617. Para la
descarga se debe realizar un registro de usuario con correo electrónico y describir el
tipo de trabajo que se realiza.
4 Wave Mode corresponde a los intervalos de adquisición de datos sobre el océano (Hoja, 2004)
25
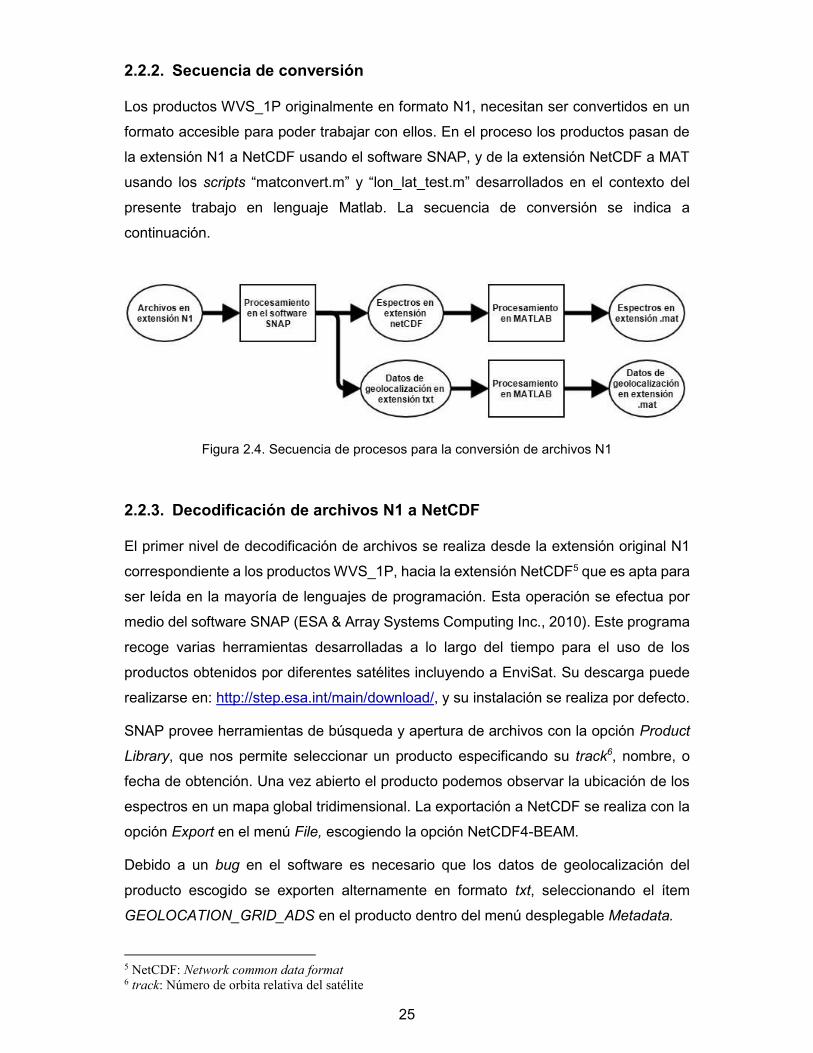
2.2.2. Secuencia de conversión
Los productos WVS_1P originalmente en formato N1, necesitan ser convertidos en un
formato accesible para poder trabajar con ellos. En el proceso los productos pasan de
la extensión N1 a NetCDF usando el software SNAP, y de la extensión NetCDF a MAT
usando los scripts “matconvert.m” y “lon_lat_test.m” desarrollados en el contexto del
presente trabajo en lenguaje Matlab. La secuencia de conversión se indica a
continuación.
Figura 2.4. Secuencia de procesos para la conversión de archivos N1
2.2.3. Decodificación de archivos N1 a NetCDF
El primer nivel de decodificación de archivos se realiza desde la extensión original N1
correspondiente a los productos WVS_1P, hacia la extensión NetCDF5 que es apta para
ser leída en la mayoría de lenguajes de programación. Esta operación se efectua por
medio del software SNAP (ESA & Array Systems Computing Inc., 2010). Este programa
recoge varias herramientas desarrolladas a lo largo del tiempo para el uso de los
productos obtenidos por diferentes satélites incluyendo a EnviSat. Su descarga puede
realizarse en: http://step.esa.int/main/download/, y su instalación se realiza por defecto.
SNAP provee herramientas de búsqueda y apertura de archivos con la opción Product
Library, que nos permite seleccionar un producto especificando su track6, nombre, o
fecha de obtención. Una vez abierto el producto podemos observar la ubicación de los
espectros en un mapa global tridimensional. La exportación a NetCDF se realiza con la
opción Export en el menú File, escogiendo la opción NetCDF4-BEAM.
Debido a un bug en el software es necesario que los datos de geolocalización del
producto escogido se exporten alternamente en formato txt, seleccionando el ítem
GEOLOCATION_GRID_ADS en el producto dentro del menú desplegable Metadata.
5 NetCDF: Network common data format 6 track: Número de orbita relativa del satélite

26
2.2.4. Decodificación de archivos NETCDF a MAT
2.2.4.1. Reconstrucción de espectros ASA_WVS_1P
Los productos ASA_WVS_1P contienen los espectros (reales e imaginarios) resultantes
de la correlación entre dos imagettes SAR (ver sección 1.3). Los espectros dentro de
cada producto están organizados en dos matrices de dimensiones 432xN. Cada matriz
corresponde a la parte real e imaginaria de los espectros y N es el número de espectros
en el paquete. El número de espectros varía entre paquetes dependiendo de la sección
de océano cubierta por la órbita (track) del satélite en Wave Mode. (Johnsen, 2005)
Los espectros SAR están provistos para un dominio “número de onda-dirección”, dentro
de una malla de dimensiones 24x36, con 01 = 24 frecuencias y 02 = 36 direcciones.
Gracias a las propiedades de simetría de los espectros (ver sección 1.3) solo la mitad
de la matriz es provista en el producto, por lo tanto, el dominio espectral discreto en
forma de índices matriciales se puede escribir como:
· Primera mitad del espectro �1: 01 , 1: ?�H �
· Segunda mitad del espectro �1: 01 , ?�H + 1: 02�
Esto nos indica que el primer paso en la reconstrucción es redimensionar la matriz
original de dimensiones 432xN en N matrices de dimensiones 24x18 y organizar los
valores en arrays complejos que contengan la parte real e imaginaria de los espectros.
El siguiente paso consiste en un escalamiento de los valores, debido a que estos se
encuentran grabados en formato uint (unsigned integer) con valores positivos7 que van
desde 1 hasta 255. El escalamiento es lineal y se realiza con los valores máximos y
mínimos de la parte real e imaginaria. Estos valores pueden ser encontrados dentro del
metadata del producto con el nombre de max_real y min_real. Este proceso se realiza
aplicando las siguientes ecuaciones. (Johnsen, 2005)
�� .�w,� = �� .�w,� ]�� .��Z − �� .�!w255 ^ + �� .�!w
#, � ∈ [1, 0&]J �0, 022 �
( 2.1 )
7 El espectro puede contener valores negativos dependiendo del lector NetCDF utilizado, por sugerencia
de ESA este problema se resuelve sumando 256 para convertir estos valores en positivos.

27
�� .�w,� = �� .�w,� ]�� .��Z − �� .�!w255 ^ + �� .�!w
#, � ∈ [1, 0&]J �0, 022 �
( 2.2 )
Donde .�w,� representa al espectro SAR o cross spectrum en dominio discreto; �� y ��
simbolizan las partes real e imaginaria del espectro respectivamente; .��Z y .�!w
representan a los valores máximos y mínimos reales encontrados dentro del metadata.
Es necesario usar las propiedades de simetría descritas en la sección 1.3 para
reconstruir el espectro completo, esta operación puede ser visualizada en la ecuación
2.3 para la primera mitad del espectro y en la ecuación 2.4 para la segunda mitad del
espectro.
.� _1: 01 , 1: 022 ` = .� _1: 01 , 1: 022 ` ( 2.3 )
.� _1: 01 , 1: 022 ` = .� _1: 01 , 1: 022 ` ( 2.4 )
Donde .� representa el espectro discreto reconstruido (cross spectrum) escalado en
unidades de �H de dimensiones 24x36. El uso de arrays complejos facilita la
reconstrucción, debido a que las propiedades de simetría descritas en la sección 1.3
pueden ser aplicadas directamente con la conjugada.
2.2.4.2. Cálculo del dominio espectral
El dominio de los espectros SAR que usan los productos WVS_1P es número de onda-
dirección. Los números de onda (&w) en unidades (�"U/�) se encuentran separados
logarítmicamente, y las direcciones ('�) dadas en grados sexagesimales tienen una
separación constante. El primer paso es calcular el vector de números de onda (&w)
utilizando las siguientes ecuaciones:
3 = ] 5�5?�^
AH?��A ( 2.5 )
&�w = 2<5E 3w ; # ∈ [0 , 201 − 1] ( 2.6 )
Donde 5� corresponde a la primera longitud de onda con un valor nominal de 800 m, y
5?� corresponde a la última longitud de onda con un valor nominal de 30 m. Ambos
valores pueden ser encontrados en el metadata del producto con los nombres de:
first_wl_bin y last_wl_bin respectivamente (Johnsen, 2005). Las ecuaciones 2.5 y 2.6

28
están dadas para un espaciamiento de doble densidad en la malla espectral, para tener
la malla con un espaciamiento simple se debe tomar los valores impares del vector &�w
de la siguiente manera:
&w�A = &�Hw�A ; # ∈ [0, 01 − 1] ( 2.7 )
Donde # corresponde a los índices del vector & que ahora contiene los valores de los
24 números de onda del dominio espectral discreto. El segundo paso es calcular el
vector de direcciones a partir de la siguiente ecuación:
'��A = '� + �∆' ; � ∈ [0 , 02 − 1] ( 2.8 )
Donde '� es el primer valor del vector de direcciones y ∆' es el espaciamiento en la
malla. Estos valores pueden ser recuperados de metadata del producto con los nombres
de first_dir_bin y dir_bin_step respectivamente. Las direcciones son contadas en sentido
horario en un sistema de referencia relativo al sentido de vuelo del satélite, sin embargo,
el análisis espectral requiere un sistema de referencia relativo al norte geográfico. El
cambio de coordenadas se realiza con la siguiente ecuación:
'�� = 360 − ('� − Ψ) ( 2.9 )
Donde Ψ representa el ángulo entre la dirección de vuelo (azimutal) y el norte
geográfico, su valor consta en el metadata del producto con el nombre de heading.
2.2.4.3. Cambio de dominio
En la mayoría de aplicaciones se utiliza el espectro SAR en coordenadas frecuencia-
dirección por lo que se necesita realizar un cambio de dominio a través de un factor
(Jacobiano) derivado de las ecuaciones presentadas en la sección 1.1.2. Su cálculo se
muestra a continuación:
.�w,�( , ') = & U&U .�w,�(&, ') ; #, � ∈ [0 , 01]J[0, 02] ( 2.10 )
& U&U = 4<&w�&w- ( 2.11 )
Donde U&/U se calcula a partir de la relación de dispersión definida en la sección 1.1.2.
El nuevo espectro .�w,�( , ') ahora en dominio “frecuencia-dirección” tiene unidades
(1/� ). (Johnsen, 2005)
29
2.2.4.4. Obtención de estadísticas espectrales
En el mismo proceso de conversión de archivos se incluye la recolección de las
estadísticas espectrales para cada punto del track contenido en los productos WVS_1P.
La malla original de las distribuciones SPDF2D, descritas en la sección 2.1.2, tiene una
resolución espacial de 100 km, igual a la resolución de la base de datos EnviSat, por lo
que es suficiente encontrar la distribución más cercana a la ubicación del espectro, esto
se realiza mediante la función “getnumdef_v1” (tabla 2.2) desarrollada en lenguaje
MATLAB®. Adicionalmente, se obtienen estadísticas espectrales a partir de una base
mensual denominadas como SPDF2D_M, estas proveen una fuente adicional para el
desarrollo de indicadores probabilísticos, usados en el proceso de desambiguación (ver
sección 2.3.2.2).
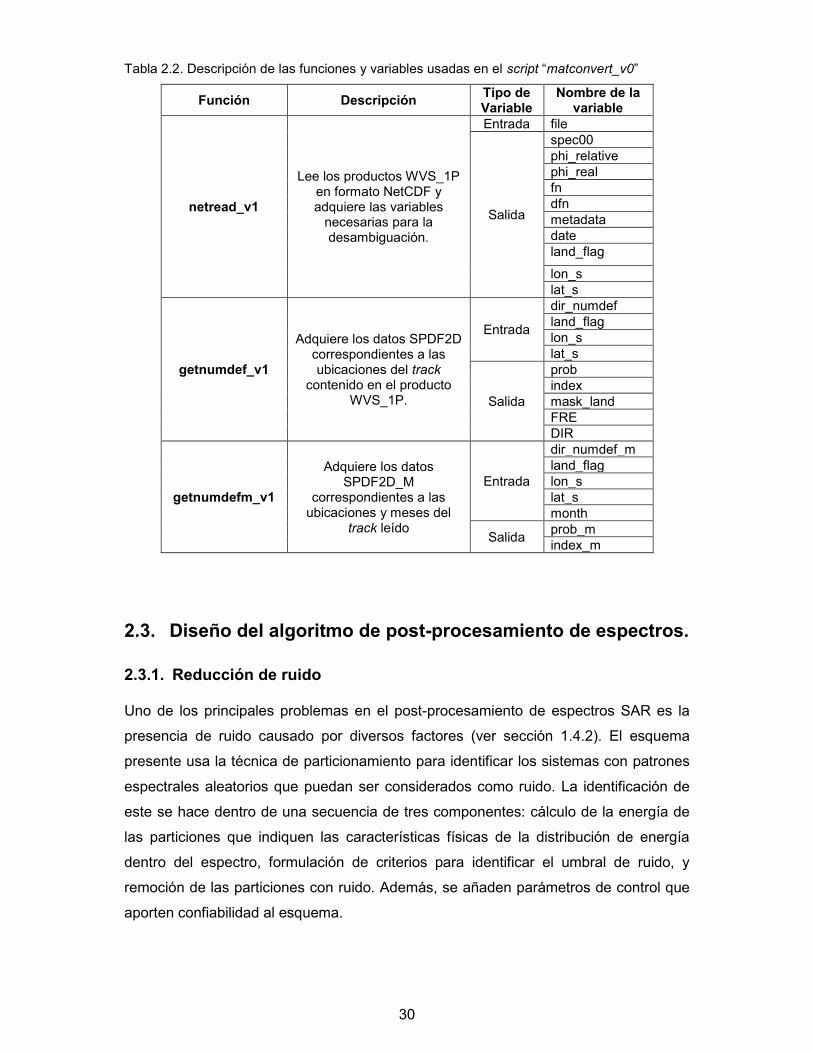
2.2.4.5. Script “matconvert_v0”
Las operaciones de transformación descritas hasta ahora fueron implementadas en un
script desarrollado en lenguaje MATLAB® denominado “matconvert_v0”. Este realiza el
proceso de adquisición de: espectros SAR, estadísticas SPDF2D - SPDF2D_M, y
metadata a partir de archivos NetCDF, utilizando los siguientes datos de entrada:
· Dirección de la carpeta contenedora de los archivos NetCDF.
· Dirección de la carpeta de exportación de los archivos en extensión MAT.
· Dirección de la carpeta contenedora de los archivos
GLOSWAC_NUMDEF_OVERALL y ECMWF_GAUSSIAN_GRID que contienen
las funciones SPDF2D y la malla de procesamiento de la base de datos.
· Dirección de la carpeta contenedora de las funciones SPDF2D_M clasificados
en archivos MAT mensualmente.
· Dirección de las funciones usadas en el script.
Las funciones usadas y las variables obtenidas en este script son detalladas en la tabla
2.2. Todas las variables obtenidas en este script son organizadas en datos tipo
estructura que facilita el manejo de las mismas. Finalmente son guardadas con el
nombre del archivo NetCDF original para mantener coherencia en el esquema de
transformación.
30
Tabla 2.2. Descripción de las funciones y variables usadas en el script “matconvert_v0”
Función Descripción Tipo de Variable
Nombre de la variable
netread_v1
Lee los productos WVS_1P en formato NetCDF y adquiere las variables
necesarias para la desambiguación.
Entrada file
Salida
spec00 phi_relative phi_real fn dfn metadata date land_flag
lon_s lat_s
getnumdef_v1
Adquiere los datos SPDF2D correspondientes a las ubicaciones del track
contenido en el producto WVS_1P.
Entrada
dir_numdef land_flag lon_s lat_s
Salida
prob index mask_land FRE DIR
getnumdefm_v1
Adquiere los datos SPDF2D_M
correspondientes a las ubicaciones y meses del
track leído
Entrada
dir_numdef_m land_flag lon_s lat_s month
Salida prob_m index_m
2.3. Diseño del algoritmo de post-procesamiento de espectros.
2.3.1. Reducción de ruido
Uno de los principales problemas en el post-procesamiento de espectros SAR es la
presencia de ruido causado por diversos factores (ver sección 1.4.2). El esquema
presente usa la técnica de particionamiento para identificar los sistemas con patrones
espectrales aleatorios que puedan ser considerados como ruido. La identificación de
este se hace dentro de una secuencia de tres componentes: cálculo de la energía de
las particiones que indiquen las características físicas de la distribución de energía
dentro del espectro, formulación de criterios para identificar el umbral de ruido, y
remoción de las particiones con ruido. Además, se añaden parámetros de control que
aporten confiabilidad al esquema.

31
Figura 2.5. Representación matricial de un espectro con ruido
2.3.1.1. Energía de las particiones
El cálculo de energía de las particiones constituye un punto de partida para la
formulación de criterios de identificación de ruido, debido a que con los resultados se
pueden evaluar las características físicas de la distribución de energía. Este análisis se
realiza calculando la integral doble del espectro sobre el dominio de cada partición como
lo muestra la ecuación 2.12.
�! = ¡ .�( , ') U'U ¢£¤
( 2.12 )
Donde .¥!8 representa al dominio de la partición analizada en frecuencia y dirección
' y el subíndice P toma valores desde 1 hasta el número de particiones del espectro
analizado. Se recalca que al ser el espectro SAR ambiguo, la energía de las particiones
ambiguas debe ser igual, en la práctica esta última condición no se cumple, ya que al
contener los espectros una gran cantidad de ruido, el particionamiento generó varios
sistemas pequeños sin par ambiguo. Considerando que la importancia de estos
sistemas es menor, se decidió descartar a las particiones que no posean un par con
igual nivel de energía.
2.3.1.2. Criterios de identificación de ruido
Luego de evaluar la distribución energética de las particiones calculada en la sección
anterior, se formuló un esquema para la identificación del umbral de ruido que consiste
en: tendencia energética de las particiones, crecimiento espurio de energía en el
8 PD: partition domain
50 100 150 200 250 300 350
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
direccion [grados]
fre
qu
en
cia
[H
z]
ruido

32
espectro 1D y adicionalmente se estableció un parámetro de control basado en la
energía de las particiones.
Tendencia Energética
Este criterio se basa en las características físicas de la distribución de energía dentro
del espectro, el comportamiento de esta distribución es normalmente exponencial, pero
al analizar las particiones de baja energía podemos observar una tendencia anormal de
decaimiento lineal. En la figura 2.6 se representa la energía individual de 23 pares de
particiones ambiguos, a medida que nos acercamos a las particiones de baja energía
se puede inferir que en algún punto comienza el comportamiento lineal de la energía.
Este punto se denomina umbral de ruido.
Para cuantificar la linealidad del comportamiento energético se utiliza el coeficiente de
correlación lineal �H calculado recursivamente para diferentes números de particiones.
Al comienzo se toma todas las particiones para el cálculo de �H y luego se disminuye el
par más energético iterativamente hasta finalizar con los 3 pares menos energéticos
para que sea posible establecer un valor de correlación. El primer pico en �H con un
coeficiente superior a 0.9 (tendencia lineal) puede ser considerado como el umbral de
ruido.
Figura 2.6. Identificación del umbral de ruido basado en la tendencia de decaimiento de la energía de las particiones
Crecimiento espurio de energía
La gran cantidad de particiones consideradas como posible ruido pueden sumar una
cantidad significativa de energía típicamente en las altas frecuencias, simulando un
sistema de oleaje adicional. Esto se puede observar en el espectro 1D de la figura 2.7.
0 10 20 30 400
10
20
30
40
porc
enta
je d
e e
nerg
ia (
%)
numero de particion0 10 20 30 40
0.6
0.7
0.8
0.9
1
corr
ela
cio
n R
2
correlacion R2
umbral de ruido
Tendencia lineal anormal
Par de particiones

33
Este criterio revisa que particiones a partir de la frecuencia del punto de crecimiento
espurio no han sido eliminadas con el criterio anterior y se las descarta.
Figura 2.7. Espectro SAR 1D con incremento espurio de energía en las frecuencias altas
Adicionalmente se añade un parámetro de control con el objetivo de evitar la eliminación
de posibles particiones importantes, por lo que verifica que la energía individual de todas
las particiones consideradas como ruido sea menor que el 3%, garantizando que solo
las particiones con bajos niveles de energía sean eliminadas con los dos criterios
anteriores.
2.3.1.3. Algoritmos de reducción de ruido
La primera sección del script “disambiguation” explicado más adelante en la sección
2.3.4, procesa los espectros para eliminar el ruido detectado por los criterios anteriores,
es necesario que este proceso se lleve a cabo antes de la desambiguación para mejorar
la calidad de post-procesamiento y evitar gastar recursos computacionales
innecesariamente. La implementación de este proceso en MATLAB® se realizó por
medio de cuatro funciones tabuladas a continuación.
Tabla 2.3. Funciones y variables usadas para la reducción de ruido
Función Definición Tipo de Variable
Nombre de la Variable
part2Dspec Particiona el espectro ingresado
y devuelve la posición de los picos de energía
Entrada spec nang nfre
Salida
npart part
peaka peakf
0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.22
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
frequencia [Hz]
energ
ia [
m2
rad s
]
espectro con ruido
INCREMENTO ESPURIO DE ENERGÍA

34
getpenergy Calcula la energía de todas las particiones y guarda los valores
en un vector
Entrada npart part spec
Salida penergy
noise_reduct Reduce el ruido presente en los espectros originales dentro de
los productos WVS_1P
Entrada penergy
part spec
Salida
rsquare specmod
mask_noise num_noise
bug_correct
Elimina las particiones de baja energía que no poseen pares ambiguos y asigna sus índices
correspondientes
Entrada
num_noise part spec
peaka
peakf
Salida
num_noise1
part1
peaka1 peakf1
2.3.2. Desambiguación
La ambigüedad direccional de los espectros SAR es el problema más importante de los
expuestos en este trabajo (ver sección 1.4.1). El esquema introducido comprende un
proceso multicriterio basado en la probabilidad de ocurrencia de los sistemas de oleaje
(particiones) en la ubicación del espectro. La probabilidad de cada partición es
cuantificada con las estadísticas SPDF2D descritas en la sección 2.1.2.1 (Portilla et al.,
2015), y en base a este valor se elige clasifica los sistemas como reales o espurios.
Además, se cuantifica la calidad de la desambiguación en base a un esquema de quality
flags.
2.3.2.1. Cálculo de probabilidades
Al igual que en el esquema de reducción de ruido, la desambiguación basa su método
fundamentalmente en la técnica de partición espectral (ver sección 2.1.1). El cálculo de
la probabilidad de cada partición se hace de manera similar al cálculo de la energía
descrito en la sección 2.3.1.1. En este caso se calcula el número de ocurrencias de la
partición y se divide para el numero de ocurrencias de todo el espectro, luego se
multiplica este resultado por cien para tener el valor en porcentaje (ecuación 2.13).
.�! = ∬ §.¥f2¥ ( , ') U'U ¢£¤∫ ∫ §.¥f2¥ ( , ') U'U H©ECª�C«J(100%) ( 2.13 )

35
Donde .�! es la probabilidad de ocurrencia de la partición P. Con este método de cálculo,
se desarrollaron indicadores basados en las mismas estadísticas espectrales que
ayudan a la selección de las particiones verdaderas, estos se describen a continuación:
1) Probabilidad total de ocurrencia: Calculada como la integral del espectro
SPDF2D sobre el dominio de la partición analizada y normalizada con la integral
total de SPDF2D.
2) Probabilidad mensual de ocurrencia: Calculada igual que en 1) pero con los
espectros SPDF2D_M de base mensual, este indicador mide la probabilidad de
ocurrencia de una partición en una fecha o estación específica.
3) Probabilidad total de ocurrencia ponderada: Este indicador mide la probabilidad
de ocurrencia de una partición calculada al igual que en 1), pero toma en cuenta
la distribución de la energía en su dominio al ponderarla con el espectro
normalizado.
4) Probabilidad mensual de ocurrencia ponderada: Calculado igual que en 3) pero
con base mensual.
Los espectros SPDF2D_M corresponden al número de ocurrencias de una base
mensual. El indicador probabilístico desarrollado a partir de estas estadísticas incluye al
tiempo como variable de entrada, lo que permite que el valor de la probabilidad tome en
cuenta la fecha de adquisición del espectro de EnviSat y provea un criterio de decisión
adicional.
Los indicadores de probabilidad ponderada (total y mensual) son calculados en base a
la ecuación 2.13, pero antes de realizar la integración multiplican el espectro SAR
normalizado con las distribuciones estadísticas SPDF2D o SPDF2D_M según el caso.
Esta operación permite que el valor de probabilidad resultante no solo considere la
ubicación de la partición en la malla frecuencia-dirección, sino que también tome en
cuenta la distribución de energía en la misma. De manera práctica, esta consideración
fue hecha para evitar que las zonas menos energéticas de las particiones sumen
números de ocurrencia que no están en la parte principal de su dominio.
El proceso de integración de los espectros SPDF2D y SPDF2D_M para la obtención de
las probabilidades es mostrado de manera esquemática en la figura 2.8. Las líneas en
azul sobre los espectros SPDF2D (panel b) y SPDF2D_M (panel c) representan el
dominio de las particiones en el espectro original (panel a). La probabilidad se calcula
sumando los números de ocurrencia dentro de los dominios de las particiones.

36
Figura 2.8. Ilustración esquemática del cálculo de probabilidades de un espectro SAR tomado en la ubicación (3.48°N, 81.53°O). Las líneas azules representan los dominios de las
particiones identificadas
Luego de realizar el proceso de integración del número de ocurrencias de los sistemas
de oleaje, se calcula los indicadores de probabilidad en valores porcentuales con la
ecuación 2.13. Los resultados para las 8 particiones observadas en la figura 2.8 son
presentados en la tabla 2.4.
Tabla 2.4. Probabilidades para los sistemas de oleaje en el punto (3.48°N, 81.53°O)
Partición Probabilidad anual (%)
Probabilidad mensual (%)
Probabilidad anual ponderada (%)
Probabilidad mensual ponderada (%)
1 0 0 0 0 2 22.5 13.5 25.2 13.7 3 0 0 0 0 4 32.5 43.8 35.6 54.3 5 4.1 9.02 1.67 3.4 6 31.2 28.2 26.1 23.1 7 0.86 0.95 0.76 0.83 8 8.98 4.26 10.4 4.51
2.3.2.2. Criterios de desambiguación
Los criterios de desambiguación implementados comprenden un esquema multicriterio
de decisión basado en los indicadores probabilísticos descritos en la sección 2.3.2.1, y
otros indicadores secundarios creados con el objetivo de mantener consistencia en la
dirección de propagación del oleaje.
Criterios principales
Los criterios principales se establecen de acuerdo con los cuatro indicadores descritos
anteriormente: probabilidad total, probabilidad mensual y sus ponderaciones
respectivas. Se considera que la desambiguación en este nivel tiene la más alta calidad
con respecto a los demás criterios, debido a la gran base poblacional de las estadísticas
(ver sección 2.1.2.1). El esquema de decisión corresponde a una degradación de la
calidad de desambiguación que depende del número de indicadores que coinciden o no
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0
100
200
300
400
500
600
700
800
900
1000
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1000
2000
3000
4000
5000
6000
7000
34
7
8
2
1
6
5
34
7
8
2
1
6
5
34
7
8
2
1
6
5
Espectro Normalizado Número de ocurrenciasanuales
Número de ocurrenciasmensuales

37
con la misma elección. La tabla 2.4 muestra cuatro pares de sistemas de oleaje (8
particiones) desambiguados con los indicadores probabilísticos principales. Tomando
como ejemplo el primer par de particiones (sistemas 1 y 2) podemos observar que los
cuatro indicadores coinciden en la decisión, presentando la mayor probabilidad para la
partición número dos, por lo que la relación de probabilidad para todos los casos es
infinita (debido a que la partición espuria tiene probabilidad cero). Este resultado indica
el alto nivel confianza en la decisión, ya que la interpretación es que no ha existido
ningún sistema de oleaje propagándose en la dirección de la partición 1 dentro del
periodo estadístico que comprende la función SPDF2D. Menores diferencias en las
probabilidades indican que ambas particiones tienen posibilidades similares de ocurrir y
por lo tanto el nivel de confianza disminuye.
Criterios de soporte
Existen casos en los que no todos los criterios mencionados anteriormente concurren
en la misma decisión por lo que la evaluación de los indicadores puede terminar en 3
contra 1 o 2 contra 1. La tabla 2.5 muestra un ejemplo en el que uno de los indicadores
(probabilidad mensual) no coincide con la decisión de los demás indicadores principales
(particiones 3 y 4).
Tabla 2.5 Probabilidades para los sistemas de oleaje del punto (2.74°S, 82.89°O)
Partición Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Espectro siguiente (%)
Model First Guess (%)
1 5.72 9.59 1.29 2.67 1.32 0.60 2.58 2 57.68 48.89 83.63 80.64 37.18 79.84 78.76 3 7.44 13.53 2.16 4.74 7.15 1.48 1.01 4 10.76 12.81 8.48 7.23 47.48 17.55 4.91 5 7.21 5.73 1.65 1.65 0.92 0.53 3.95 6 11.19 9.45 2.78 3.08 5.94 0.00 8.80
Para resolver estos casos se incluyen criterios adicionales basados en la consistencia
a lo largo del track y la comparación con el modelo numérico. El ejemplo de las
particiones 3 y 4 en la tabla 2.5, muestra que los indicadores probabilísticos calculados
a partir de las comparaciones del espectro analizado con el espectro anterior, espectro
siguiente, y model first guess, ayudan a resolver la incertidumbre generada por la
contradicción en la probabilidad mensual. Es así como finalmente tenemos una
evaluación de 6 contra 1, indicando que la partición real es la número 4.
El criterio de consistencia del track se obtuvo luego del análisis del comportamiento
físico del oleaje. Observando que el tamaño de las imagettes tomadas por SAR es de
5x5 Km, la separación entre capturas es de 100 Km (relativamente corta en el océano)

38
y el tiempo de separación en la captura de los espectros es de pocos segundos, se
puede concluir que el cambio en la dirección de propagación del oleaje debe ser gradual,
es decir, un espectro en el track no debe diferir en gran medida de su espectro anterior
o del siguiente. Usando esta observación se construyen los dos nuevos indicadores que
parten de la comparación con el espectro anterior y el siguiente. (Collard et al., 2009)
El otro indicador útil como criterio de soporte, es el uso del model first guess que consiste
en un modelo numérico que simula las condiciones de oleaje usando información acerca
del viento que lo originó, por lo que puede ser utilizado para realizar predicciones en una
ubicación y tiempo determinado. Este indicador es usado como criterio principal de
validación en otros estudios (S. Hasselmann et al., 1996; Hoja, 2004). Sin embargo, en
este estudio se lo considera como secundario debido a que existe una diferencia
importante entre el tiempo de obtención de los espectros EnviSat y el tiempo de
generación de los espectros en el modelo, por lo que se produce una baja confiabilidad.
2.3.3. Calidad del proceso de desambiguación (Quality flags)
La calidad de los resultados obtenidos está ligada completamente a la cuantificación de
la diferencia de probabilidad entre particiones reales y espurias, además de la
evaluación del número de criterios (reales o de soporte) que concurran en una misma
decisión. El esquema de calidad propuesto se llevó a cabo bajo un proceso empírico de
análisis, prueba y error, en el cual se evaluó la relación entre las probabilidades de las
particiones reales sobre las espurias. Luego, observando la consistencia física de la
propagación del oleaje en el track, se determinó rangos de calidad.
El proceso de desambiguación es llevado a cabo en una cascada de ocho iteraciones,
en cada una de ellas se incrementa el nivel de incertidumbre del proceso y se asocia un
quality flag que indica la calidad de desambiguación. La calidad más alta corresponde a
los sistemas cuya relación de probabilidad es mayor que 10, es decir que la partición
real es 10 veces más probable que la partición espuria. El segundo rango corresponde
a un valor intermedio en la relación de probabilidad (mayor que 3), por lo tanto, desde
este nivel se necesita de los criterios de soporte para asegurar que la decisión sea más
robusta. Los demás niveles de calidad ya no se basan en la relación de probabilidades,
sino en el número de criterios que concurran en una misma decisión. Las particiones
que no son asignadas a ningún nivel de incertidumbre o que la suma de sus
probabilidades es demasiado baja (menor al 2%) se eliminan como un segundo nivel de
ruido. A continuación, se presenta un resumen de los criterios de decisión explicados en
la sección 2.3.2.2 asociados al esquema de quality flags.

39
Tabla 2.6. Criterios del esquema de calidad
2.3.4. Script “disambiguation_v0”
Para aplicar los criterios de desambiguación se desarrolló un script en lenguaje
MATLAB®. El algoritmo se compone de varios subprocesos, desarrollados
secuencialmente en iteraciones individuales (loops) que depuran al espectro crudo
(figura 2.9). El primer loop comprende la reducción de ruido descrita en la sección 2.3.1,
haciendo uso de las funciones descritas en la tabla 2.2. Las iteraciones siguientes
comprenden la desambiguación aplicando los criterios descritos en la tabla 2.5. El
aumento de las iteraciones necesarias significa que la decisión entre particiones reales
Quality Flag
Color
Criterios
Parámetros de probabilidad consistentes
Relación entre las probabilidades de particiones reales sobre las espurias
Criterios de Apoyo
QF1 Azul
Todos
>10 :1 N/A
QF2 Verde >3:1
Particiones anteriores o posteriores desambiguadas con QF1
QF3 Magenta Model first guess
QF4 Cian >1:1 Particiones anteriores o posteriores desambiguadas con QF1
QF5 Naranja
La suma de las probabilidades y la energía de las particiones es demasiado baja (< 2%)
Ruido consistente
QF6 Gris 3 de 4 >1:1
Particiones anteriores o posteriores desambiguadas con QF1, o model first guess
QF7 Negro
2 de 4
>1:1
Particiones anteriores y posteriores desambiguadas desde QF1 a QF6, o model first guess.
QF8 Rojo >1:1
Particiones anteriores o posteriores desambiguadas desde QF1 a QF7, o model first guess
Ruido 2 de 4 Suma de
probabilidades (<2%)

40
y espurias se vuelve más difícil de tomar, por lo que aumenta el grado de incertidumbre.
El nivel de incertidumbre es cuantificado con los quality flags mencionados. Las
variables de entrada requeridas en este script son las siguientes:
· Dirección de los archivos MAT obtenidos con el script “matconvert_v0.m”
· Dirección de la carpeta contenedora de los espectros GLOBWAVE.
· Dirección de almacenamiento los espectros desambiguos.
· Dirección de almacenamiento de las figuras con los resultados obtenidos.
Figura 2.9. Procesamiento iterativo del script “disambiguation_v0”
2.4. Procesamiento automático
Luego de probar el algoritmo de post-procesamiento descrito en la sección 2.3.4 en
casos piloto, el siguiente paso es realizar una automatización total del proceso, es decir,
que los algoritmos descritos anteriormente sean capaces de procesar bases de datos
extensas proporcionando resultados confiables. El diseño de algoritmos es un proceso
iterativo y requiere de la revisión y producción de nuevas versiones, el enfoque en esta
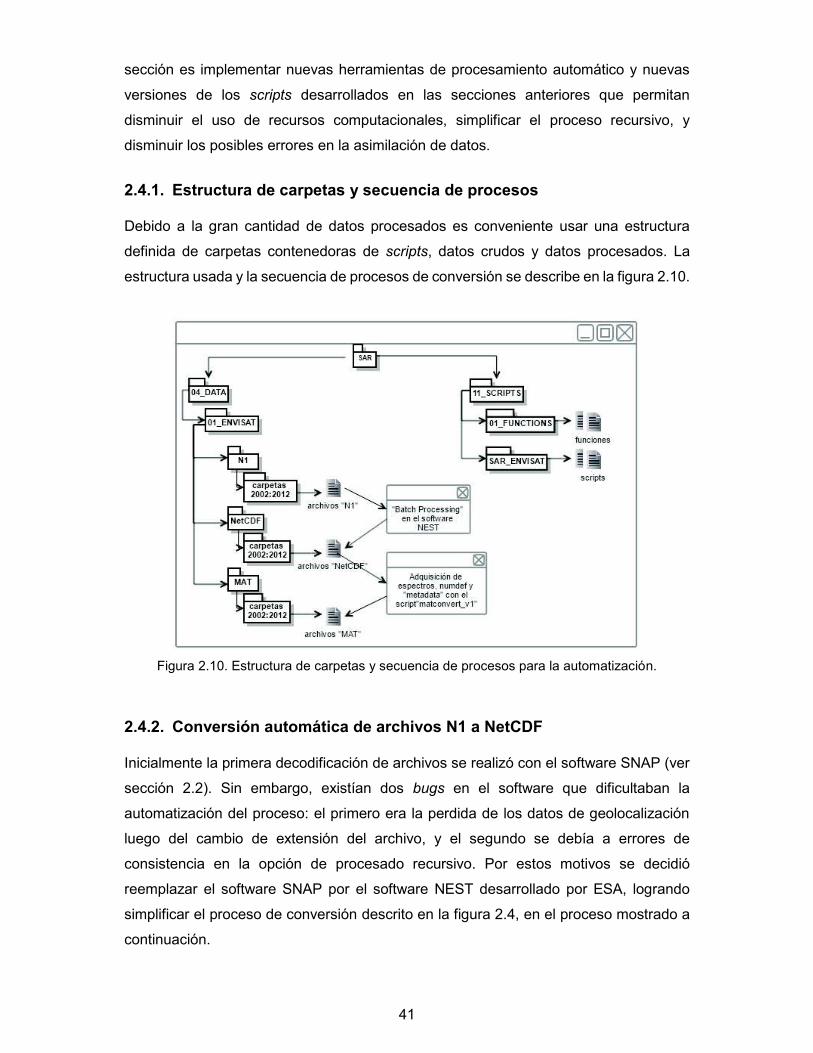
41
sección es implementar nuevas herramientas de procesamiento automático y nuevas
versiones de los scripts desarrollados en las secciones anteriores que permitan
disminuir el uso de recursos computacionales, simplificar el proceso recursivo, y
disminuir los posibles errores en la asimilación de datos.
2.4.1. Estructura de carpetas y secuencia de procesos
Debido a la gran cantidad de datos procesados es conveniente usar una estructura
definida de carpetas contenedoras de scripts, datos crudos y datos procesados. La
estructura usada y la secuencia de procesos de conversión se describe en la figura 2.10.
Figura 2.10. Estructura de carpetas y secuencia de procesos para la automatización.
2.4.2. Conversión automática de archivos N1 a NetCDF
Inicialmente la primera decodificación de archivos se realizó con el software SNAP (ver
sección 2.2). Sin embargo, existían dos bugs en el software que dificultaban la
automatización del proceso: el primero era la perdida de los datos de geolocalización
luego del cambio de extensión del archivo, y el segundo se debía a errores de
consistencia en la opción de procesado recursivo. Por estos motivos se decidió
reemplazar el software SNAP por el software NEST desarrollado por ESA, logrando
simplificar el proceso de conversión descrito en la figura 2.4, en el proceso mostrado a
continuación.

42
Figura 2.11. Simplificación de la secuencia de decodificación de espectros.
2.4.2.1. Procesamiento Recursivo (NEST)
El procesamiento recursivo (batch processing) es una opción del software NEST que
permite ingresar una base de datos extensa y procesarla automáticamente definiendo
nodos de operación. El primer paso es construir la secuencia de nodos dentro de la
opción Graph Builder y luego se exporta los archivos con la opción Batch Processing,
ambas descritas a continuación.
Graph Builder
La conversión de archivos en el software NEST se realiza por operadores llamados
nodos, estos pueden ser usados directamente en el command line, o de una manera
más simple en la opción Graph Builder. Esta herramienta permite conectar una serie de
nodos operadores para realizar la transformación de archivos, y guardar la secuencia
realizada en un archivo XML que puede ser usado posteriormente en la opción Batch
Processing (ESA & Array Systems Computing Inc., 2010). Las operaciones necesarias
en nuestro caso son: lectura de archivos N1, selección de bandas espectrales, y
escritura en la nueva extensión NetCDF.
Batch Processing
La herramienta Batch Processing permite ejecutar el graph creado anteriormente para
el procesamiento recursivo de un grupo de archivos. Dependiendo de las operaciones
seleccionadas en el Graph Builder, se añaden pestañas de modificación de parámetros.
Para nuestro caso la única opción adicional a la lectura y escritura de los archivos es la
selección de bandas, por lo que en la pestaña Band Select se deben elegir las opciones
Cross_Spectra_Q y Cross_Spectra_I correspondientes a la parte real y ambigua del
espectro SAR respectivamente. Los archivos deben ser exportados con la opción
NetCDF-BEAM, que permite conservar el metadata del producto.
2.4.3. Conversión automática de archivos NetCDF a MAT
Para automatizar el proceso de conversión, se desarrolló nuevas versiones del script
“mat_convert”, y de las funciones: “netread”, “getnumdef”, “getnumdef_m”, indicadas en
la tabla 2.2. Esta nueva versión trae consigo varios cambios en la lectura de espectros
y procesamiento recursivo.

43
2.4.3.1. Script “matconvert_v1”
Este script añade la opción de realizar un procesamiento recursivo a través del
command window de MATLAB®. El programa solicita el ingreso de la opción “b” (batch
processing) para realizar el procesamiento recursivo, o la opción “s” (select file) para un
procesamiento individual.
La opción batch processing es capaz de procesar toda la base de datos disponible o
seleccionar partes de esta de acuerdo con la fecha de adquisición de los espectros. El
ingreso de las fechas en el command line puede hacerse en los formatos (yyyy),
(yyyymm) ó (yyyymmdd), para el proceso de datos de un año, mes o día específico,
respectivamente.
La opción select file incorpora un buscador de archivos basado en la fecha de
adquisición y el número de track de los espectros. El script solicita el ingreso de la fecha
en formato (yyyymmdd) y el ingreso del número de track en formato (00nnn). El archivo
se elige a partir de una lista de los que tengan el mismo número de track.
2.4.4. Verificación y Actualización del algoritmo de post-procesamiento
2.4.4.1. Reducción de ruido (versión 1)
El esquema de reducción de ruido tuvo modificaciones menores basadas en
consideraciones hechas en (Hoja, 2004). Como se explicó en la sección 1.3 los
espectros SAR poseen una parte real y una imaginaria resultantes de la aplicación de
la transformada de Fourier sobre los datos crudos. Los datos usados para la reducción
de ruido corresponden a la parte real de los espectros, sin embargo, el módulo de los
espectros complejos (ecuación 2.14) es más consistente que solo la parte real cuando
se tienen imágenes con alto nivel de ruido. (Hoja, 2004)
.�w,� = X[��Y.�w,�\]H + [��Y.�w,�\]H ; #, � ∈ [0 , 01]J[0, 02] ( 2.14 )
2.4.4.2. Desambiguación (versión 1)
Con el objetivo de priorizar el procesamiento automático de la base de datos de EnviSat
y reducir el uso de recursos computacionales, se modificó el esquema multicriterio
inicial, excluyendo los espectros del model first guess como criterio de soporte. Esto
permite que la base de la desambiguación sean las probabilidades extraídas de los
espectros: SPDF2D, SPDF2D_M y la consistencia a lo largo de cada track analizado.

44
Además, se incluyó una operación adicional para evitar errores de procesamiento,
descrita a continuación.
2.4.4.3. Detección de espectros contaminados por tierra
Una de las modificaciones fundamentales en el esquema automático de
desambiguación fue la detección de continente o islas presentes en la ubicación de los
espectros adquiridos por EnviSat, debido a que uno de los criterios de desambiguación
es la comparación con el espectro anterior, por lo que es necesario que el proceso
iterativo se reinicie cada vez que detecte tierra para evitar producir datos falsos de
espectros anteriores inexistentes. Para lograr esto, los productos WVS_1P poseen una
variable llamada land_flag que indica la presencia de tierra en el track analizado
(Johnsen, 2005). Además, el nuevo script usa la variable mask obtenida junto con los
espectros SPDF2D que indica los puntos de la malla que son tierra. Estos datos
permiten que la secuencia de desambiguación se reinicie cada vez que detecta la
presencia de tierra y evite errores en los indicadores de consistencia del track.
2.5. Comparación
Existen pocas opciones al momento comparar los resultados de post-procesamiento de
datos satelitales, debido a que la cobertura satelital a escala global es única y las
mediciones proporcionadas por otros instrumentos son de escala local. Una de las
opciones más adecuadas en este contexto es la comparación con bases de datos
generadas a partir de metodologías diferentes a la propuesta en este trabajo (ver
sección 1.5). Con esta consideración, en esta investigación se seleccionó la base de
datos GlobWave como fuente de validación y comparación.
2.5.1. Espectros GlobWave
El proyecto GlobWave financiado por Data User Element (DUE) fue desarrollado como
un programa opcional para el post-procesamiento de los datos provistos por la Agencia
Especial Europea (ESA). El objetivo de este proyecto fue buscar una mejora a los datos
oceanográficos recogidos por las misiones satelitales ERS-1, ERS-2 y EnviSat. (SatOC
& CLS, 2012)
En el marco del análisis de este trabajo, se escogen los productos GlobWave que parten
del post-procesamiento de los productos WVW_2P provistos por ESA. Los espectros
GlobWave disponibles son el resultado del uso de la metodología Image Cross Spectra
Inversion explicada en la sección 1.5.1, junto con información adicional como:
parámetros recalibrados basados en comparaciones estadísticas con los datos de

45
boyas oceanográficas, anotaciones de errores estadísticos, indicadores de calidad
(quality flags), y parámetros espectrales de particionamiento. A pesar de las mejoras
realizadas en este proyecto, los datos producidos no tienen una calidad aceptable
debido a dos problemas principales detectados: particionamiento deficiente de
espectros y desambiguación errónea que son discutidos en la sección 3.3.3.
2.5.2. Quality flags GlobWave
El esquema de calidad propuesto por GlobWave asigna quality flags a cada uno de los
espectros de la base de datos. Los indicadores de calidad y su significado son descritos
en la tabla 2.6. (SatOC, 2010)
Tabla 2.7. Niveles de calidad de los espectros GlobWave
Quality Flag Significado 0 Probablemente buena medición. 1 Sospechoso, probablemente bien para algunas aplicaciones. 2 Probablemente mala medición. 127 No evaluado.
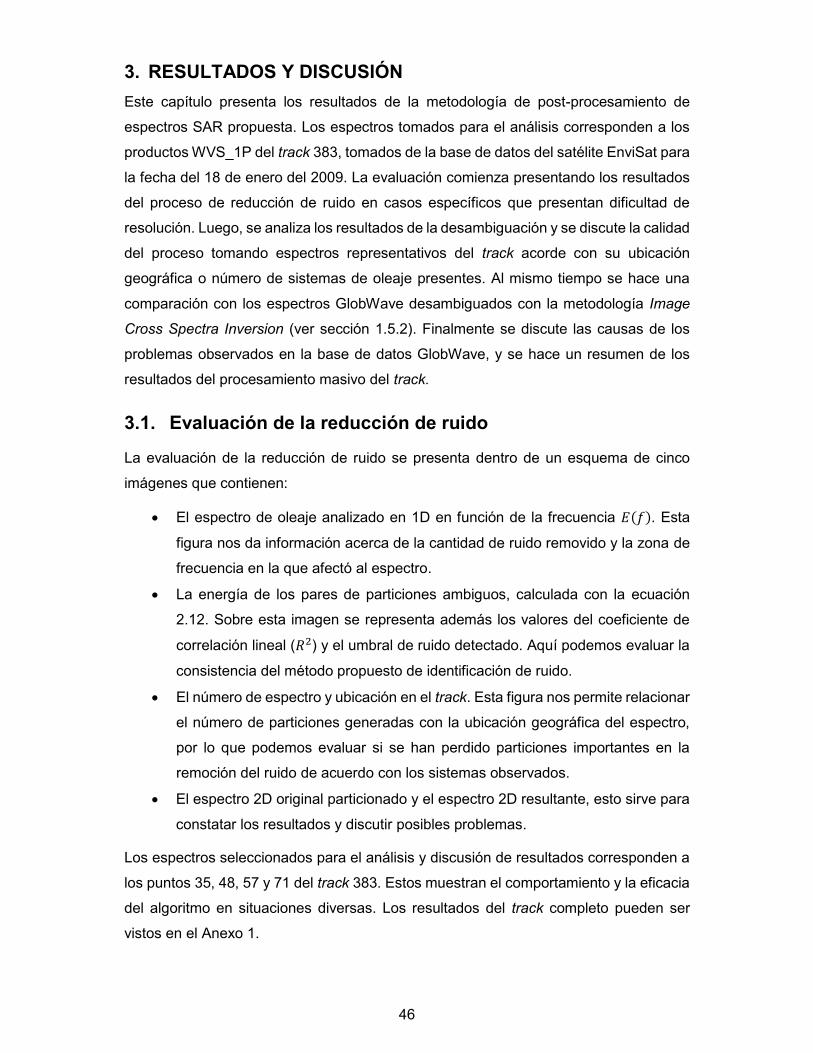
46
3. RESULTADOS Y DISCUSIÓN
Este capítulo presenta los resultados de la metodología de post-procesamiento de
espectros SAR propuesta. Los espectros tomados para el análisis corresponden a los
productos WVS_1P del track 383, tomados de la base de datos del satélite EnviSat para
la fecha del 18 de enero del 2009. La evaluación comienza presentando los resultados
del proceso de reducción de ruido en casos específicos que presentan dificultad de
resolución. Luego, se analiza los resultados de la desambiguación y se discute la calidad
del proceso tomando espectros representativos del track acorde con su ubicación
geográfica o número de sistemas de oleaje presentes. Al mismo tiempo se hace una
comparación con los espectros GlobWave desambiguados con la metodología Image
Cross Spectra Inversion (ver sección 1.5.2). Finalmente se discute las causas de los
problemas observados en la base de datos GlobWave, y se hace un resumen de los
resultados del procesamiento masivo del track.
3.1. Evaluación de la reducción de ruido
La evaluación de la reducción de ruido se presenta dentro de un esquema de cinco
imágenes que contienen:
· El espectro de oleaje analizado en 1D en función de la frecuencia %( ). Esta
figura nos da información acerca de la cantidad de ruido removido y la zona de
frecuencia en la que afectó al espectro.
· La energía de los pares de particiones ambiguos, calculada con la ecuación
2.12. Sobre esta imagen se representa además los valores del coeficiente de
correlación lineal (�H) y el umbral de ruido detectado. Aquí podemos evaluar la
consistencia del método propuesto de identificación de ruido.
· El número de espectro y ubicación en el track. Esta figura nos permite relacionar
el número de particiones generadas con la ubicación geográfica del espectro,
por lo que podemos evaluar si se han perdido particiones importantes en la
remoción del ruido de acuerdo con los sistemas observados.
· El espectro 2D original particionado y el espectro 2D resultante, esto sirve para
constatar los resultados y discutir posibles problemas.
Los espectros seleccionados para el análisis y discusión de resultados corresponden a
los puntos 35, 48, 57 y 71 del track 383. Estos muestran el comportamiento y la eficacia
del algoritmo en situaciones diversas. Los resultados del track completo pueden ser
vistos en el Anexo 1.
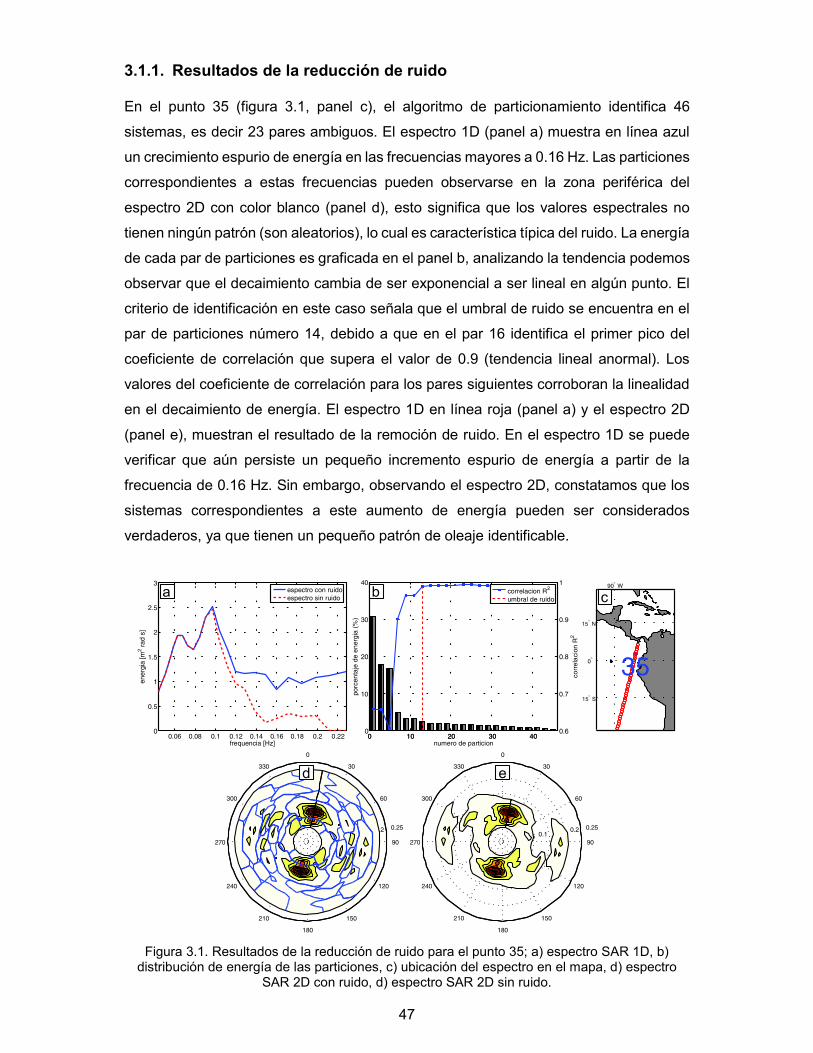
47
3.1.1. Resultados de la reducción de ruido
En el punto 35 (figura 3.1, panel c), el algoritmo de particionamiento identifica 46
sistemas, es decir 23 pares ambiguos. El espectro 1D (panel a) muestra en línea azul
un crecimiento espurio de energía en las frecuencias mayores a 0.16 Hz. Las particiones
correspondientes a estas frecuencias pueden observarse en la zona periférica del
espectro 2D con color blanco (panel d), esto significa que los valores espectrales no
tienen ningún patrón (son aleatorios), lo cual es característica típica del ruido. La energía
de cada par de particiones es graficada en el panel b, analizando la tendencia podemos
observar que el decaimiento cambia de ser exponencial a ser lineal en algún punto. El
criterio de identificación en este caso señala que el umbral de ruido se encuentra en el
par de particiones número 14, debido a que en el par 16 identifica el primer pico del
coeficiente de correlación que supera el valor de 0.9 (tendencia lineal anormal). Los
valores del coeficiente de correlación para los pares siguientes corroboran la linealidad
en el decaimiento de energía. El espectro 1D en línea roja (panel a) y el espectro 2D
(panel e), muestran el resultado de la remoción de ruido. En el espectro 1D se puede
verificar que aún persiste un pequeño incremento espurio de energía a partir de la
frecuencia de 0.16 Hz. Sin embargo, observando el espectro 2D, constatamos que los
sistemas correspondientes a este aumento de energía pueden ser considerados
verdaderos, ya que tienen un pequeño patrón de oleaje identificable.
Figura 3.1. Resultados de la reducción de ruido para el punto 35; a) espectro SAR 1D, b)
distribución de energía de las particiones, c) ubicación del espectro en el mapa, d) espectro SAR 2D con ruido, d) espectro SAR 2D sin ruido.
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0 10 20 30 400
10
20
30
40
po
rce
nta
je d
e e
nerg
ia (
%)
numero de particion0 10 20 30 40
0.6
0.7
0.8
0.9
1co
rre
lacio
n R
2
correlacion R2
umbral de ruido
35
90° W
15°
S
0°
15°
N
0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.220
0.5
1
1.5
2
2.5
3
frequencia [Hz]
energ
ia [m
2ra
d s
]
espectro con ruido
espectro sin ruido
d e
b ca

48
En el punto 48 (figura 3.2, panel c) se identifican 48 particiones (24 pares ambiguos). El
espectro 1D (panel a) muestra un solo pico de energía en la frecuencia 0.08 Hz y un
incremento espurio de energía a partir de la frecuencia 0.15 Hz. En el espectro 2D con
ruido (panel d) se puede observar que solo dos sistemas son significativos, los demás
corresponden a variación aleatoria del espectro. El criterio de identificación de ruido
(panel b) en este caso establece el umbral de ruido en la partición 16, lo cual no es
suficiente ya que los pares de particiones anteriores también presentan valores altos de
linealidad (mayores a 0.9) aun sin ser un pico en la gráfica. El porcentaje de particiones
eliminadas como ruido corresponde al 66.7%, sin embargo, aún se puede observar ruido
remanente en el espectro resultante (panel e). El espectro resultante 1D (panel a)
muestra reducción en la energía acumulada en las últimas frecuencias, a pesar de que
se puede observar la energía correspondiente al ruido no removido.
Figura 3.2. Resultados de la reducción de ruido para el punto 48; a) espectro SAR 1D, b)
distribución de energía de las particiones, c) ubicación del espectro en el mapa, d) espectro SAR 2D con ruido, d) espectro SAR 2D sin ruido.
En el panel a del punto 57 (figura 3.3, panel c), podemos observar el incremento espurio
de energía a partir de la frecuencia 0.12 Hz. El coeficiente de correlación lineal cuantifica
la tendencia de la energía correspondiente a las 42 particiones calculadas y establece
el umbral de ruido en la partición 14. Cabe recalcar que 2 pares de particiones anteriores
al umbral de ruido superan el coeficiente de 0.9, sin embargo, el umbral es elegido por
ser el primer pico en la gráfica. Esta decisión aparentemente trivial, contribuye a que los
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
48
90°
W
30°
S
15°
S
0°
15°
N
0 10 20 30 400
10
20
30
40
50
60
po
rcen
taje
de e
ne
rgia
(%
)
numero de particion0 10 20 30 40
0.4
0.5
0.6
0.7
0.8
0.9
1
co
rre
lacio
n R
2
correlacion R2
umbral de ruido
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.220
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
frequencia [Hz]
energ
ia [m
2ra
d s
]
espectro con ruidoespectro sin ruido
d e
b ca
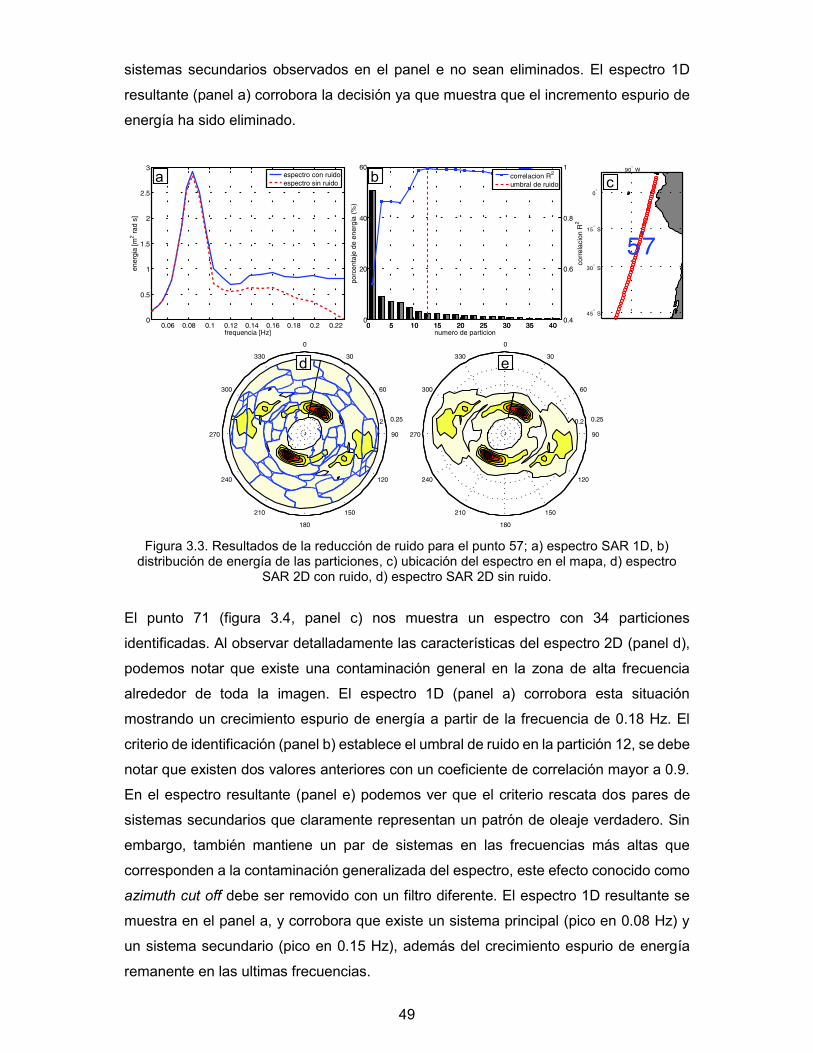
49
sistemas secundarios observados en el panel e no sean eliminados. El espectro 1D
resultante (panel a) corrobora la decisión ya que muestra que el incremento espurio de
energía ha sido eliminado.
Figura 3.3. Resultados de la reducción de ruido para el punto 57; a) espectro SAR 1D, b)
distribución de energía de las particiones, c) ubicación del espectro en el mapa, d) espectro SAR 2D con ruido, d) espectro SAR 2D sin ruido.
El punto 71 (figura 3.4, panel c) nos muestra un espectro con 34 particiones
identificadas. Al observar detalladamente las características del espectro 2D (panel d),
podemos notar que existe una contaminación general en la zona de alta frecuencia
alrededor de toda la imagen. El espectro 1D (panel a) corrobora esta situación
mostrando un crecimiento espurio de energía a partir de la frecuencia de 0.18 Hz. El
criterio de identificación (panel b) establece el umbral de ruido en la partición 12, se debe
notar que existen dos valores anteriores con un coeficiente de correlación mayor a 0.9.
En el espectro resultante (panel e) podemos ver que el criterio rescata dos pares de
sistemas secundarios que claramente representan un patrón de oleaje verdadero. Sin
embargo, también mantiene un par de sistemas en las frecuencias más altas que
corresponden a la contaminación generalizada del espectro, este efecto conocido como
azimuth cut off debe ser removido con un filtro diferente. El espectro 1D resultante se
muestra en el panel a, y corrobora que existe un sistema principal (pico en 0.08 Hz) y
un sistema secundario (pico en 0.15 Hz), además del crecimiento espurio de energía
remanente en las ultimas frecuencias.
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
57
90°
W
45°
S
30°
S
15°
S
0°
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.220
0.5
1
1.5
2
2.5
3
frequencia [Hz]
energ
ia [m
2ra
d s
]
espectro con ruido
espectro sin ruido
0 5 10 15 20 25 30 35 400
20
40
60
po
rce
nta
je d
e e
nerg
ia (
%)
numero de particion0 5 10 15 20 25 30 35 40
0.4
0.6
0.8
1
co
rre
lacio
n R
2
correlacion R2
umbral de ruido
d e
b ca

50
Figura 3.4. Resultados de la reducción de ruido para el punto 71; a) espectro SAR 1D, b)
distribución de energía de las particiones, c) ubicación del espectro en el mapa, d) espectro SAR 2D con ruido, d) espectro SAR 2D sin ruido.
3.2. Evaluación y comparación de desambiguación
Para ilustrar la efectividad de la metodología propuesta, se presenta los resultados
obtenidos para el track 383 del satélite EnviSat. El análisis está enfocado en la parte del
track que barre la zona este del Océano Pacífico (puntos 31:109). Esta es un área
abierta del océano dominada por oleaje de fondo (swell) proveniente de la zona sur,
además se pueden encontrar sistemas provenientes del sur durante el invierno boreal.
La fecha de obtención del track (18 de enero del 2009) ha sido elegida tomando en
cuenta la presencia de múltiples sistemas de oleaje en los espectros y la dificultad que
esto representa. En la parte norte, cerca de América Central, el track es restringido por
el borde del continente, por lo cual la consistencia física en los resultados de la
desambiguación puede ser controlada.
Figura 3.5. Track 383 correspondiente a la zona Este del Océano Pacífico, el color azul indica
los espectros tomados para análisis.
0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.220
0.5
1
1.5
2
2.5
3
3.5
frequencia [Hz]
energ
ia [m
2ra
d s
]
espectro con ruido
espectro sin ruido
71
90°
W
45°
S
30°
S
15°
S
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0 5 10 15 20 25 300
20
40
po
rce
nta
je d
e e
nerg
ia (
%)
numero de particion0 5 10 15 20 25 30
0.6
0.8
1
co
rre
lacio
n R
2
correlacion R2
umbral de ruido
d e
b ca
120°
W 90°
W 60°
W
30°
S
15°
S
0°
15°
N
30°
N
Track 383 EnviSat

51
3.2.1. Resultados de la desambiguación de espectros
El punto 34 (figura 3.6, panel c) es cercano al borde continental con una configuración
desafiante para la desambiguación, presentando al menos cuatro sistemas de oleaje
verdaderos. La información del modelo numérico (panel e) favorece a los sistemas que
se propagan en dirección 15°, pero tiene dificultades evaluando los otros sistemas
presentes, debido a que el espectro es demasiado suave para resolverlo. El espectro
GlobWave (panel d) muestra algunas inconsistencias, los pares ambiguos en los
sectores 60°-120° y 240°-340° no son resueltos completamente, como podemos ver en
algunos ejemplos, este error es común en los espectros GlobWave. El SPDF2D (panel
f) muestra algunas particiones tienen una clara probabilidad de ocurrir frente a sus pares
ambiguos de probabilidad cero. Esto ayuda a que el proceso de desambiguación sea
muy confiable y que los cuatro sistemas sean resueltos con QF1. Las demás particiones
originales son rechazadas como ruido en el primer o segundo filtro.
Figura 3.6. Desambiguación para el punto 34; a) espectro ambiguo sin ruido, b) espectro
desambiguo con quality flags, c) espectro GlobWave con quality flag, d) ubicación del espectro, e) model first guess, f) estadísticas espectrales de oleaje
Tabla 3.1 Indicadores de probabilidad para el punto 34
N° QF Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Espectro siguiente (%)
Model First Guess (%)
1 1 0.01 0.00 0.01 0.00 0.10 4.91 0.08 2 1 10.44 17.57 15.26 25.05 45.72 15.72 2.19 3 1 0.00 0.00 0.00 0.00 0.00 0.25 0.00 4 1 27.54 30.50 25.94 32.41 37.82 16.46 14.32 5 1 1.35 4.10 0.39 1.10 0.28 0.15 2.30 6 1 31.19 32.34 29.53 28.24 8.68 41.98 38.17
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
34
90°
W
15°
S
0°
15°
N
d e f
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
24
6
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
b caqf=0
18-Enero-2009 15:17:35

52
En el punto 37 (figura 3.7, panel c) el espectro presenta una suavidad anormal que
complica su procesamiento. Este defecto ocurre usualmente cuando la imagen presenta
errores (p.ej., por contaminación de tierra). A pesar de ello, en este caso específico el
espectro fue resuelto con QF1. Sin embargo, observando con mayor detalle en los
espectros anterior y posterior (Anexo 1), se observa que el sistema principal puede ser
resultado de la unión de dos sistemas propagándose en las direcciones de 100° y 15°,
el hecho de que la desambiguación de este espectro sea correcta es porque
afortunadamente la partición menos energética se propaga en la dirección de 15°, si la
partición principal se hubiera unido a su par ambiguo propagándose hacia la dirección
de 195°, el SPDF2D no habría sido capaz de discernir correctamente los sistemas
debido a la suavidad del espectro. El modelo numérico es poco concluyente con
respecto al sistema más energético. El algoritmo de GlobWave parece detectar
problemas en el espectro porque no es considerado.
Figura 3.7. Desambiguación para el punto 37; a) espectro ambiguo sin ruido, b) espectro
desambiguo con quality flags, c) espectro GlobWave con quality flag, d) ubicación del espectro, e) model first guess, f) estadísticas espectrales de oleaje
Tabla 3.2 Indicadores de probabilidad para el punto 37
N° QF Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Espectro siguiente (%)
Model First Guess (%)
1 1 97.89 94.87 99.94 99.85 97.73 98.70 97.54 2 1 2.11 5.13 0.06 0.15 2.27 1.30 2.46
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
10.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
0
37
90°
W
15°
S
0°
15°
N
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
d e
b ca
f
qf=2
18-Enero-2009 15:18:20

53
El punto 49 (figura 3.8, panel c) muestra un espectro con un sistema de oleaje principal
y algunos picos secundarios. Las asignaciones de las particiones principales en el
modelo numérico y en el SPDF2D presentan una buena consistencia, por lo tanto, los
desafíos para la desambiguación son menores. El espectro resultante (panel b) presenta
dos sistemas con QF1 y recupera otro par de sistemas más con QF4 y QF5, el algoritmo
trata de preservar estos últimos para mantener la consistencia en el track. En este
sentido estos sistemas son importantes porque muestran una zona de transición donde
las olas provenientes del suroeste de la costa de Chile comienzan a aparecer en la
región y por lo tanto en las mediciones del track. Por otro lado, el espectro GlobWave
(panel c) presenta un sistema de oleaje desambiguado coincidente con el espectro
resultante presentado, sin embargo, las particiones secundarias no aparecen, por lo cual
se puede considerar que ha perdido una parte de la información.
Figura 3.8. Desambiguación para el punto 49; a) espectro ambiguo sin ruido, b) espectro desambiguo con quality flags, c) espectro GlobWave con quality flag, d) ubicación del espectro,
e) model first guess, f) estadísticas espectrales de oleaje
Tabla 3.3 Indicadores de probabilidad para el punto 49
N° QF Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Espectro siguiente (%)
Model First Guess (%)
1 1 49.58 43.93 83.23 83.42 84.58 75.12 77.62 2 1 3.36 5.68 0.84 1.54 0.30 4.27 1.73 3 4 14.83 11.06 5.25 3.42 2.48 3.00 1.90 4 4 25.11 35.75 8.47 10.69 8.33 9.82 14.73 5 1 7.02 3.52 2.17 0.92 4.31 7.79 2.46 6 1 0.06 0.04 0.03 0.02 0.00 0.00 1.31 7 5 0.05 0.01 0.01 0.00 0.00 0.00 0.24 8 5 0.00 0.00 0.00 0.00 0.00 0.00 0.01
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
0
49
90°
W
30°
S
15°
S
0°
15°
N
d e f
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
4
15
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
b caqf=0
18-Enero-2009 15:21:20

54
Para el punto 54 (figura 3.9, panel c), el modelo provee un buen soporte para las
particiones principales, pero el espectro SAR contiene sistemas de oleaje extra en
direcciones opuestas que son difíciles de discernir. El SPDF (panel f) es más categórico,
especialmente considerando a los sistemas de oleaje de fondo (swell) propagándose
hacia la dirección de 120°, resultando en cuatro sistemas de oleaje procesados con
QF1. En el espectro GlobWave hay inconsistencias en los sistemas secundarios, las
cuales han sido divididas en las dos posibles direcciones. Es importante recalcar que la
presencia de los sistemas secundarios se debe a la buena identificación del umbral de
ruido en el procesamiento anterior. Una pequeña partición es desambiguada con QF8
en la dirección de 110°, debido a que el cálculo de probabilidad toma información de
una parte del swell que se propaga en 120° y para su par ambiguo toma información del
sistema generado en el área local en la dirección 300°.
Figura 3.9. Desambiguación para el punto 54; a) espectro ambiguo sin ruido, b) espectro
desambiguo con quality flags, c) espectro GlobWave con quality flag, d) ubicación del espectro, e) model first guess, f) estadísticas espectrales de oleaje
Tabla 3.4 Indicadores de probabilidad para el punto 54
N° QF Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Model First Guess (%)
1 1 9.01 9.94 5.22 5.13 6.02 6.17 2 1 46.84 42.92 73.65 74.55 62.94 71.89 3 1 0.20 0.00 0.08 0.00 0.00 0.02 4 1 18.26 29.29 10.08 14.17 13.09 9.47 5 1 17.14 9.52 7.00 2.85 9.88 3.28 6 1 0.43 0.33 0.19 0.12 0.82 2.81 7 1 6.49 7.09 3.24 2.93 0.32 5.07 8 1 0.00 0.00 0.00 0.00 0.00 0.20 9 5 0.00 0.00 0.00 0.00 0.00 0.00 10 5 1.64 0.92 0.55 0.26 6.94 1.09
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
54
90°
W
30°
S
15°
S
0°
d e f
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
10
2
4
57
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
b caqf=0
18-Enero-2009 15:22:35

55
El punto 65 (figura 3.10, panel c) muestra un espectro muy desafiante. El algoritmo ha
procesado dos sistemas con QF1 y otros dos con QF4, estos últimos seleccionados
debido a que presentan una alta probabilidad en la comparación con el espectro
siguiente. La asignación de las particiones con el modelo es difícil. El espectro
GlobWave contiene algunos sistemas desambiguados, pero algunas particiones han
sido divididas artificialmente en las dos direcciones y parte de la energía espectral ha
sido removida. Sin embargo, la partición de mayor energía desambiguada con QF4
coincide con la partición presentada en el espectro GlobWave, esta comparación ayuda
a que el nivel de confiabilidad de la decisión se incremente.
Figura 3.10. Desambiguación para el punto 65; a) espectro ambiguo sin ruido, b) espectro desambiguo con quality flags, c) espectro GlobWave con quality flag, d) ubicación del espectro,
e) model first guess, f) estadísticas espectrales de oleaje
Tabla 3.5 Indicadores de probabilidad para el punto 65
N° QF Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Model First Guess (%)
1 4 48.60 40.20 55.19 52.14 50.00 63.04 2 4 14.33 19.19 10.86 14.29 17.60 5.05 3 1 11.78 8.81 12.90 7.97 27.84 15.50 4 1 0.24 0.01 0.22 0.01 0.00 0.31 5 4 7.10 5.52 5.82 3.77 2.08 1.50 6 4 7.82 6.55 6.75 5.59 0.00 6.44 7 1 0.01 0.00 0.00 0.00 0.00 0.00 8 1 10.13 19.72 8.25 16.22 2.48 8.17
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1
6
3
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
65
90°
W
45°
S
30°
S
15°
S
0°
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
d e
b ca
f
qf=0
18-Enero-2009 15:25:20

56
En el punto 102 (figura 3.11, panel c) las condiciones se vuelven más difíciles debido a
la cercanía con el área de generación de tormentas, El SPDF2D contiene valores
positivos en todas las direcciones, por lo tanto, la relación de probabilidades se vuelve
menos categórica. Los resultados dejan un sistema procesado con QF1, uno con QF2,
dos con QF4, y uno con QF5. El espectro final coincide bastante bien con el espectro
del modelo numérico, sin embargo, no es debido a la comparación con este, sino debido
a la verificación de la continuidad del track. El algoritmo de GlobWave no es capaz de
resolver el espectro, además, la asignación de su quality flag es errónea ya que el
indicador cero debería corresponder a la calidad más alta.
Figura 3.11. Desambiguación para el punto 102; a) espectro ambiguo sin ruido, b) espectro desambiguo con quality flags, c) espectro GlobWave con quality flag, d) ubicación del espectro,
e) modelo numérico de predicción, f) estadísticas espectrales de oleaje
Tabla 3.6 Indicadores de probabilidad para el punto 102
N° QF Anual (%)
Mensual (%)
Anual ponderada (%)
Mensual ponderada (%)
Espectro anterior (%)
Espectro siguiente (%)
Model First Guess (%)
1 2 7.88 8.01 10.07 10.26 0.40 0.00 0.06 2 2 36.79 43.27 38.93 43.74 10.25 13.46 72.78 3 1 5.75 1.33 3.52 0.43 0.00 0.00 1.07 4 1 41.25 38.11 40.05 37.20 53.09 53.62 12.29 5 5 1.42 1.91 1.00 1.22 0.00 12.15 1.72 6 5 0.13 0.01 0.08 0.00 0.00 0.00 0.01 7 4 1.34 1.37 1.62 1.64 0.00 0.00 0.01 8 4 1.85 3.23 2.15 3.51 0.00 17.97 6.74 9 4 1.70 0.63 1.22 0.45 36.27 0.63 0.15 10 4 0.42 0.15 0.19 0.05 0.00 0.70 0.63 11 5 0.49 0.75 0.38 0.48 0.00 0.00 0.00 12 5 0.99 1.22 0.80 1.00 0.00 1.47 4.53
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
5128
9
2
4 0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
102
90°
W
75°
S
60°
S
45°
S
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
d e
b ca
f
qf=0
18-Enero-2009 15:34:35

57
3.3. Características de la base de datos GlobWave
En la sección anterior pudimos observar diversos problemas relacionados con la calidad
de los espectros procesados en el proyecto GlobWave. Algunos de los inconvenientes
principales se discuten a continuación.
3.3.1. Particionamiento GlobWave
El esquema de particionamiento de GlobWave considera únicamente dos sistemas de
oleaje de fondo (swell), en contraste con la gran cantidad de sistemas individuales
analizados en el presente trabajo. Esto ocasiona que se pierda información de otras
particiones probablemente importantes. Para visualizar el problema, tomamos como
ejemplo al espectro 36 del track 383 (figura 3.12). El panel a) muestra al espectro de
GlobWave con solo dos particiones, sin embargo, el espectro original mostrado en el
panel b) muestra al menos 3 pares de particiones ambiguas importantes.
Figura 3.12. a) Espectro GlobWave, b) Espectro original particionado.
3.3.2. Desambiguación GlobWave
Luego de revisar la base de datos de GlobWave, se encontraron algunas inconsistencias
típicas de fácil detección. La primera es observar oleaje propagándose hacia fuera de la
costa (figura 3.13), esto no es posible debido a que la ubicación del espectro es cercana
al perfil continental por lo que existe una restricción física en la dirección de propagación
del oleaje. La segunda inconsistencia detectada es la presencia de varios espectros
evidentemente ambiguos (sin resolución) en el track analizado como se observa en el
en los ejemplos analizados en la sección 3.2.1.
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
ba

58
Figura 3.13. a) Espectro GlobWave con un sistema de oleaje propagándose en la dirección de 300°, b) Ubicación del espectro en el track.
3.3.3. Quality flags GlobWave
La base de datos GlobWave posee un esquema de calidad constituido de quality flags.
La principal diferencia con el esquema propuesto en este trabajo es que GlobWave
asigna una calidad de desambiguación al espectro completo y el algoritmo presentado
considera la calidad de cada sistema de oleaje individual. Esto ocasiona que los quality
flags de GlobWave sean poco significativos y no aporten información útil acerca de la
calidad de procesamiento de los espectros.
3.4. Resultados y estadísticas totales
Para representar los resultados totales de una manera más general, se presenta un
gráfico de la dirección media de propagación para: los espectros desambiguados con el
algoritmo propuesto, espectros GlobWave, y espectros del modelo numérico. Además,
se calculó estadísticas que representan la cantidad de particiones desambiguadas en
los diferentes niveles de calidad, y las que son consideradas como ruido en el primero
o segundo filtro.
3.4.1. Dirección media de propagación de oleaje
Este parámetro nos ayuda a tener una idea global de la propagación del oleaje en los
diferentes puntos del track. La dirección media no es un indicador muy preciso debido a
que en un mismo espectro pueden existir varios sistemas de oleaje provenientes de
varias locaciones, especialmente en zonas conflictivas como es la zona Este del océano
Pacifico. Sin embargo, este nos puede ayudar a identificar la tendencia en el cambio de
dirección del oleaje, que es uno de los criterios secundarios propuesto para la
desambiguación (ver seccion 2.3.2.2).
36
90°
W
15°
S
0°
15°
N
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
ab
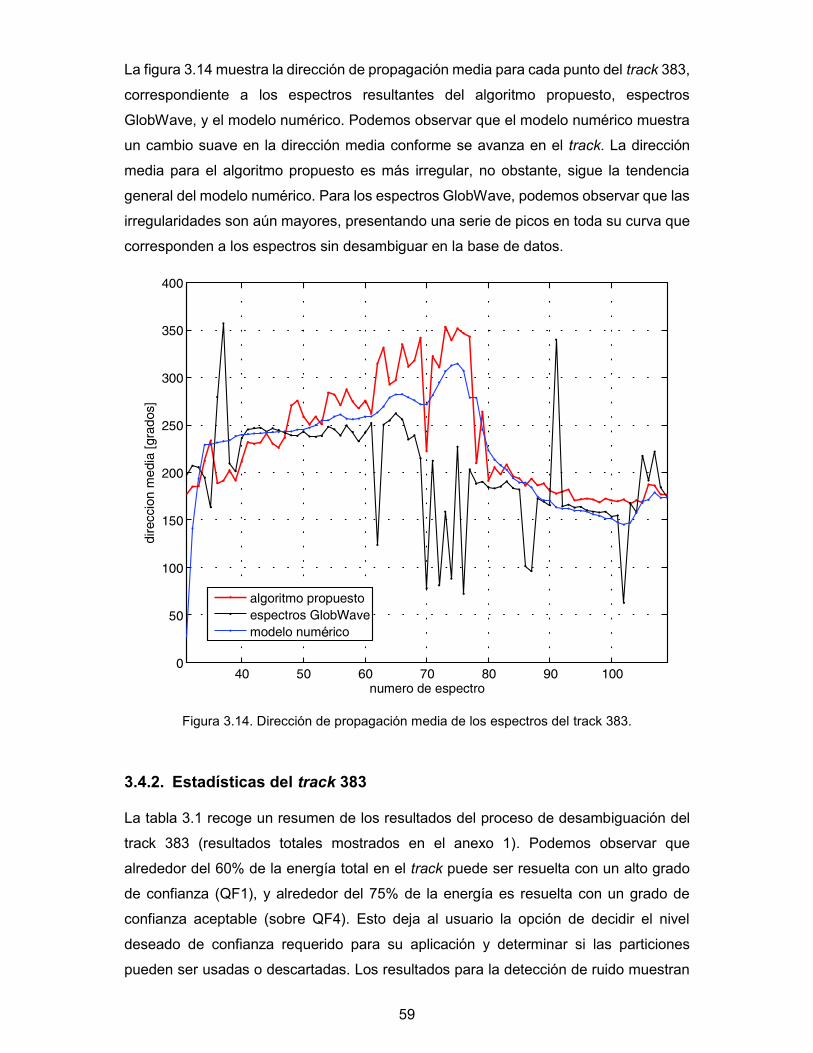
59
La figura 3.14 muestra la dirección de propagación media para cada punto del track 383,
correspondiente a los espectros resultantes del algoritmo propuesto, espectros
GlobWave, y el modelo numérico. Podemos observar que el modelo numérico muestra
un cambio suave en la dirección media conforme se avanza en el track. La dirección
media para el algoritmo propuesto es más irregular, no obstante, sigue la tendencia
general del modelo numérico. Para los espectros GlobWave, podemos observar que las
irregularidades son aún mayores, presentando una serie de picos en toda su curva que
corresponden a los espectros sin desambiguar en la base de datos.
Figura 3.14. Dirección de propagación media de los espectros del track 383.
3.4.2. Estadísticas del track 383
La tabla 3.1 recoge un resumen de los resultados del proceso de desambiguación del
track 383 (resultados totales mostrados en el anexo 1). Podemos observar que
alrededor del 60% de la energía total en el track puede ser resuelta con un alto grado
de confianza (QF1), y alrededor del 75% de la energía es resuelta con un grado de
confianza aceptable (sobre QF4). Esto deja al usuario la opción de decidir el nivel
deseado de confianza requerido para su aplicación y determinar si las particiones
pueden ser usadas o descartadas. Los resultados para la detección de ruido muestran
40 50 60 70 80 90 1000
50
100
150
200
250
300
350
400
numero de espectro
dir
eccio
n m
edia
[gra
dos]
algoritmo propuesto
espectros GlobWave
modelo numericoé

60
que alrededor del 76% de las particiones calculadas han sido eliminadas representando
un porcentaje cercano al 18% de la energía total del track, lo cual es consistente con el
criterio de identificación (ver sección 2.3.1.2).
Tabla 3.7. Estadísticas del post-procesamiento de los espectros del track 383
Quality Flag Color Número de particiones
Porcentaje de particiones (%)
Porcentaje de energía (%)
QF1 Azul 380 13.0 59.7 QF2 Verde 12 0.4 2.6 QF3 Magenta 4 0.1 0.9 QF4 Cian 136 4.7 13.1 QF5 Café 114 3.9 2.5 QF6 Naranja 12 0.4 1.3 QF7 Negro 16 0.6 0.9 QF8 Rojo 6 0.2 0.4 1er nivel de ruido 2225 76.2 17.9 2do nivel de ruido 16 0.6 0.7

61
4. CONCLUSIONES
El satélite EnviSat fue uno de los instrumentos de medición de oleaje más importantes
de los últimos tiempos. Esta misión adquirió espectros de oleaje por alrededor de 10
años, constituyendo así la primera base de datos consistente de largo plazo. Sin
embargo, el uso práctico de la información adquirida en aplicaciones ingenieriles o
científicas ha sido marginal y se reduce a productos demostrativos disponibles en
dominio público. En este trabajo se rastreó la causa de este problema hacia los
inconvenientes inherentes al método de medición del instrumento SAR. Los problemas
principales de los espectros de oleaje obtenidos por SAR se identificaron como la
ambigüedad direccional y la presencia de ruido. A pesar de que la misión EnviSat dejó
de operar en el año 2012, el procesamiento de estos datos aún es relevante, debido a
que existen vastas regiones de los océanos del mundo que siguen sin ser monitoreadas
por instrumentos in-situ.
Los productos del wave mode del satélite EnviSat se presentan en diferentes niveles de
procesamiento, los espectros procesados en el nivel 1 nombrados como WVS_1P
fueron elegidos para resolver el problema de ambigüedad direccional desde el origen.
Antes de proceder con la desambiguación, primero se resolvió el problema de remoción
de ruido espectral. En el esquema se propuso el uso de la técnica de particionamiento
para calcular la energía de los sistemas individuales e identificar las particiones que
pueden ser consideradas como ruido. Realizando un análisis semi-empírico de la
tendencia energética de los sistemas, se pudo establecer que el umbral de ruido es el
punto en el cual el decaimiento exponencial de la energía se convierte en un
decaimiento lineal. Los resultados muestran que la consideración hecha es consistente
y logra remover más del 75 % de las particiones calculadas como ruido. La eficacia del
algoritmo de reducción de ruido se analizó con casos complejos, en los cuales el punto
en el que comienza el comportamiento lineal de la energía no es fácil de detectar. No
obstante, el filtro diseñado se mostró consistente y no eliminó en ningún caso particiones
importantes, sin embargo, en algunos casos, mantuvo parte del ruido inicial a causa de
la dificultad en la detección del umbral de ruido, o de otros problemas sin tratar en este
trabajo como el azimuth cut off.
El problema de ambigüedad en la dirección de propagación del oleaje es inherente al
instrumento SAR usado por el satélite. La metodología presentada para la
desambiguación de espectros SAR se desarrolló en base a estadísticas espectrales de
oleaje de largo plazo y la técnica de partición de espectros. Al ser la población de las

62
estadísticas muy extensa, la confiabilidad en el cálculo de las probabilidades de
ocurrencia de los sistemas de oleaje aumenta. Por otro lado, el uso de la técnica de
partición de espectros basada en el algoritmo watershed y las consideraciones del
espectro como una imagen (Portilla et al., 2009), logra que la identificación de los
sistemas de oleaje se presente más robusta al implementarse en un proceso
automático, en comparación con otros enfoques mencionados en la literatura.
El uso de las estadísticas espectrales de oleaje hizo posible implementar un esquema
de indicadores de probabilidad multicriterio para estimar la posibilidad de ocurrencia de
los sistemas de oleaje individuales. Además, basándose en estos indicadores, se logró
establecer criterios de decisión para la desambiguación de los espectros SAR. El
esquema de decisiones se realizó basándose en: la relación de probabilidades de las
particiones consideradas reales sobre las espurias, y la concurrencia de los indicadores
sobre una misma decisión. A medida que la incertidumbre en las decisiones tomadas
por los criterios principales aumentaba, se incorporaron criterios secundarios para lograr
decisiones más robustas. Los resultados presentados son concluyentes, debido a que
todos los espectros fueron desambiguados con diferentes indicadores de calidad que
representan el nivel de incertidumbre en la decisión tomada por el algoritmo.
El esquema de calidad propuesto basado en qualiy flags, permite al usuario conocer de
antemano el nivel de incertidumbre asociado con la desambiguación de cada sistema
de oleaje contenido en el espectro. La información de los espectros generalmente es
usada en aplicaciones que requieren diferentes niveles de precisión y confiabilidad, por
lo que cada partición desambiguada puede ser aceptada o rechazada dependiendo de
la calidad de la misma y de las necesidades del usuario.
Para estudiar el comportamiento del algoritmo de desambiguación en condiciones
desafiantes, se eligió el track 383 de los espectros SAR ubicados en el Océano Pacífico.
La elección de la fecha (18 de enero de 2009) también fue de importancia, debido a que
esta zona se caracteriza por la presencia de oleaje proveniente del noreste y sureste en
el invierno boreal. Los espectros procesados muestran que, sin importar las
características individuales de los sistemas de oleaje en cada espectro, la consistencia
en la variación de la dirección de propagación del oleaje puede ser mantenida. Una
verificación rápida de la calidad de los resultados puede hacerse en los puntos cercanos
al borde continental, las restricciones físicas en estas ubicaciones no permiten que el
oleaje de fondo (swell) fluya hacia afuera del continente.
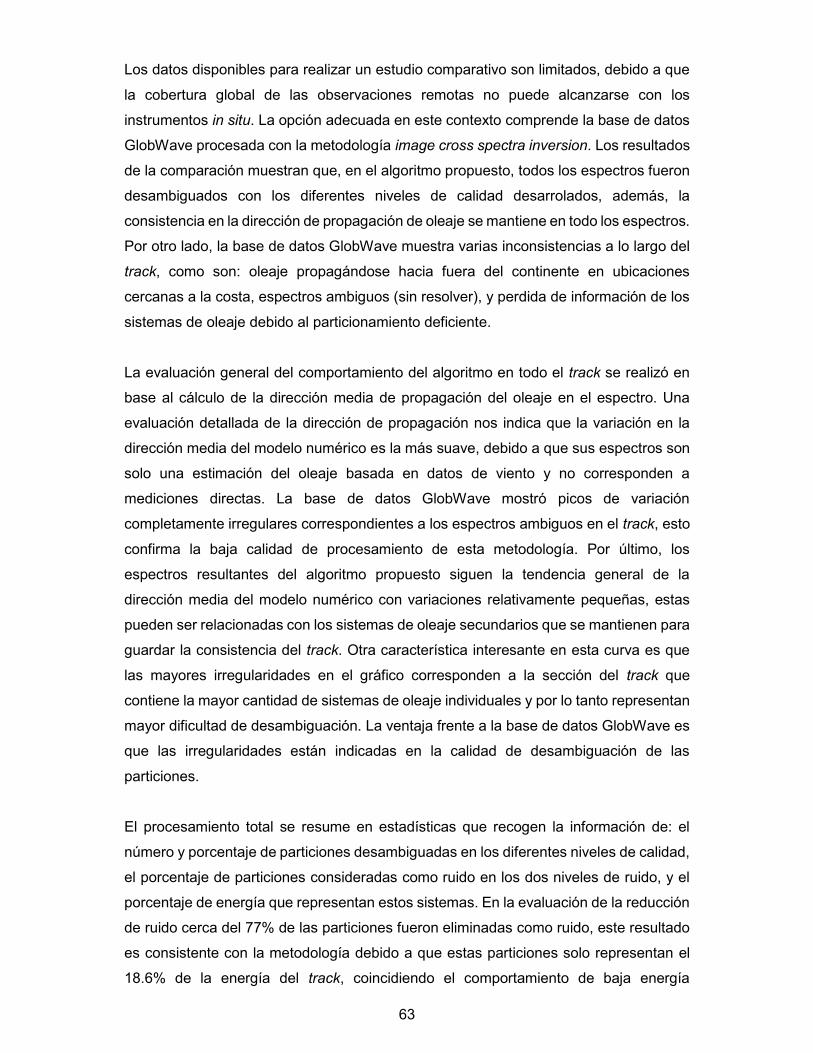
63
Los datos disponibles para realizar un estudio comparativo son limitados, debido a que
la cobertura global de las observaciones remotas no puede alcanzarse con los
instrumentos in situ. La opción adecuada en este contexto comprende la base de datos
GlobWave procesada con la metodología image cross spectra inversion. Los resultados
de la comparación muestran que, en el algoritmo propuesto, todos los espectros fueron
desambiguados con los diferentes niveles de calidad desarrolados, además, la
consistencia en la dirección de propagación de oleaje se mantiene en todo los espectros.
Por otro lado, la base de datos GlobWave muestra varias inconsistencias a lo largo del
track, como son: oleaje propagándose hacia fuera del continente en ubicaciones
cercanas a la costa, espectros ambiguos (sin resolver), y perdida de información de los
sistemas de oleaje debido al particionamiento deficiente.
La evaluación general del comportamiento del algoritmo en todo el track se realizó en
base al cálculo de la dirección media de propagación del oleaje en el espectro. Una
evaluación detallada de la dirección de propagación nos indica que la variación en la
dirección media del modelo numérico es la más suave, debido a que sus espectros son
solo una estimación del oleaje basada en datos de viento y no corresponden a
mediciones directas. La base de datos GlobWave mostró picos de variación
completamente irregulares correspondientes a los espectros ambiguos en el track, esto
confirma la baja calidad de procesamiento de esta metodología. Por último, los
espectros resultantes del algoritmo propuesto siguen la tendencia general de la
dirección media del modelo numérico con variaciones relativamente pequeñas, estas
pueden ser relacionadas con los sistemas de oleaje secundarios que se mantienen para
guardar la consistencia del track. Otra característica interesante en esta curva es que
las mayores irregularidades en el gráfico corresponden a la sección del track que
contiene la mayor cantidad de sistemas de oleaje individuales y por lo tanto representan
mayor dificultad de desambiguación. La ventaja frente a la base de datos GlobWave es
que las irregularidades están indicadas en la calidad de desambiguación de las
particiones.
El procesamiento total se resume en estadísticas que recogen la información de: el
número y porcentaje de particiones desambiguadas en los diferentes niveles de calidad,
el porcentaje de particiones consideradas como ruido en los dos niveles de ruido, y el
porcentaje de energía que representan estos sistemas. En la evaluación de la reducción
de ruido cerca del 77% de las particiones fueron eliminadas como ruido, este resultado
es consistente con la metodología debido a que estas particiones solo representan el
18.6% de la energía del track, coincidiendo el comportamiento de baja energía

64
observado en la parte lineal de la distribución energética. Los resultados de la
desambiguación son prometedores, alrededor del 13% de las particiones han sido
desambiguadas con el nivel de calidad más alto (QF1) y representan cerca del 60 % de
la energía total, esto quiere decir que los sistemas más significativos han sido resueltos
con una incertidumbre muy baja. Además, se puede observar que la energía procesada
con un nivel de calidad aceptable (QF 1:4) suma alrededor del 75%.
Un problema persistente en la secuencia iterativa de desambiguación se encuentra en
el cálculo de las probabilidades de los espectros procedentes de imágenes
contaminadas por tierra (señal SAR suave). En estos casos el proceso de decisión de
los sistemas se vuelve difícil debido a que las particiones no son fácilmente
identificables. Además, la consistencia de todo el track se ve comprometida debido a
que los criterios secundarios de desambiguación se basan en los espectros anteriores,
que en estos casos no han sido desambiguados correctamente. En el desarrollo de la
segunda versión del algoritmo (procesamiento automático) se presentó una posible
solución basada en los indicadores de tierra (land flag) contenidos en el metadata de los
productos WVS_1P de EnviSat. Sin embargo, el enfoque no fue suficiente para resolver
todos los problemas, por lo que se deberá implementar un indicador basado en la
batimetría de la zona que verifique las zonas con presencia de tierra.
Una metodología para evaluar los resultados del algoritmo es la comparación con
espectros de oleaje obtenidos por instrumentos in situ, como las boyas oceanográficas.
Algunos de estos datos son de acceso libre. Sin embargo, se requiere realizar un
proceso de selección de los espectros validos producidos por las boyas, además que el
análisis solo se puede hacer en ubicaciones específicas. Esta validación podrá hacerse
en trabajos futuros, justificada por la precisión que requieren ciertas aplicaciones
específicas.

65
Referencias Bibliográficas Bamler, R. (2002). COST 714 Application for complex ERS-2 SAR Wave Mode Data.
Obertaffenhofen.
Bao, M., & Alpers, W. (1998). On the cross spectrum between individual-look synthetic
aperture radar images of ocean waves. IEEE Transactions on Geoscience and
Remote Sensing, 36(3), 922–932. https://doi.org/10.1109/36.673683
Collard, F., Ardhuin, F., & Chapron, B. (2009). Monitoring and analysis of ocean swell
fields from space: New methods for routine observations. Journal of Geophysical
Research: Oceans, 114(7), 1–15. https://doi.org/10.1029/2008JC005215
Dee, D. P., Uppala, S. M., Simmons, A. J., Berrisford, P., Poli, P., Kobayashi, S., …
Vitart, F. (2011). The ERA-Interim reanalysis: Configuration and performance of the
data assimilation system. Quarterly Journal of the Royal Meteorological Society,
137(656), 553–597. https://doi.org/10.1002/qj.828
Engen, G., & Johnsen, H. (1995). SAR-ocean wave inversion using image cross spectra.
IEEE Transactions on Geoscience and Remote Sensing, 33(4), 1047–1056.
https://doi.org/10.1109/36.406690
ESA. (2007). European Space Agency - EnviSat ASAR Product Handbook, 564.
ESA, & Array Systems Computing Inc. (2010). Next ESA SAR Toolbox. Retrieved from
https://earth.esa.int/documents/507513/1077939/nest+user+manual+5.1
Gerling, T. W. (1992). Partitioning sequences and arrays of directional ocean wave
spectra into component wave systems. Journal of Atmospheric and Oceanic
Technology, 9, 444–458.
Hanson, J. L., & Phillips, O. M. (2001). Automated Analysis of Ocean Surface Directional
Wave Spectra. Journal of Atmospheric and Oceanic Technology, 18(2), 277–293.
https://doi.org/10.1175/1520-0426(2001)018<0277:AAOOSD>2.0.CO;2
Hasselmann, K., Chapron, B., Aouf, L., Ardhuin, F., Collard, F., Engen, G., … others.
(2012). The ERS SAR Wave Mode--A Breakthrough in global ocean wave
observations. ERS Missions-20 Years of Observing Earth, (February 2016), 1–38.
Hasselmann, K., & Hasselmann, S. (1991). On the nonlinear mapping of an ocean wave
spectrum into a synthetic aperture radar image spectrum and its inversion. Journal
of Geophysical Research, 96(C6), 10713. https://doi.org/10.1029/91JC00302
Hasselmann, S., Bruning, C., Hasselmann, K., & Heimbach, P. (1996). An improved
algorithm for the retrieval of ocean wave spectra from synthetic aperture radar

66
image spectra. Journal of Geophysical Research, 101(16), 615–629.
Hoja, D. (2004). Radar Remote Sensing of Ocean Waves - Global Mapping of Mean and
Peak Wave Parameters Extracted from SAR Cross Spectra. Institut für Methodik
der Fernerkundung.
Holthuijsen, L. H. (2007). Waves in Oceanic and Coastal Waters. The Netherlands:
Cambridge University Press.
Husson, R. (2012). Development and validation of a global observation-based swell
model using wave mode operating Synthetic Aperture Radar.
Johnsen, H. (2005). ENVISAT ASAR Wave Mode Product Description and
Reconstruction Procedure.
Portilla, J., Cavaleri, L., & Van Vledder, G. P. (2015). Wave spectra partitioning and long
term statistical distribution. Ocean Modelling, 96, 148–160.
https://doi.org/10.1016/j.ocemod.2015.06.008
Portilla, J., Ocampo-Torres, F. J., & Monbaliu, J. (2009). Spectral partitioning and
identification of wind sea and swell. Journal of Atmospheric and Oceanic
Technology, 26(1), 107–122. https://doi.org/10.1175/2008JTECHO609.1
SatOC. (2010). Satellite Wave Data Quality Report. GlobWave Project Manager.
SatOC, & CLS. (2012). GlobWave Wave Data Handbook. Retrieved from
http://globwave.ifremer.fr/download/GlobWave_PM5_presentation_v1.0.pdf
Schulz-Stellenfleth, J., König, T., & Lehner, S. (2007). An empirical approach for the
retrieval of integral ocean wave parameters from synthetic aperture radar data.
Journal of Geophysical Research, 112(C3), C03019.
https://doi.org/10.1029/2006JC003970
Stopa, J. E., Ardhuin, F., Chapron, B., & Collard, F. (2015). Estimating wave orbital
velocity through the azimuth cutoff from space-borne satellites. Journal of
Geophysical Research: Oceans, 120(11), 7616–7634.
https://doi.org/10.1002/2015JC011275
Voorrips, A. C., V. K., M., & Hasselmann, S. (1997). Assimilation of wave spectra from
pitch-and-roll buoys in a North Sea wave model. Journal of Geophysical Research,
102, 5829–5849.
Wang, H., Zhu, J., & Yang, J. (2014). Error analysis on ESA’s Envisat ASAR wave mode
significant wave height retrievals using triple collocation model. Remote Sensing,
6(12), 12217–12233. https://doi.org/10.3390/rs61212217

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
9
62
4
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
2
3
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
24
6
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
3
6
810
12
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
101
45
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
31
90°
W
15°
S
0°
15°
N
30°
N
32
90°
W
15°
S
0°
15°
N
30°
N
33
90°
W
15°
S
0°
15°
N
34
90°
W
15°
S
0°
15°
N
35
90°
W
15°
S
0°
15°
N
36
90°
W
15°
S
0°
15°
N
a) b) c) d) e)
18-Jan-2009 15:16:50
18-Jan-2009 15:17:05
18-Jan-2009 15:17:20
18-Jan-2009 15:17:35
18-Jan-2009 15:17:50
18-Jan-2009 15:18:05
qf=1
qf=1
qf=0
qf=0
qf=0
qf=2
ANEXOS
Anexo I. Espectros del track 383 del satélite EnviSat
Figura I.1 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
67

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
2
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
2
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
6
2
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
1
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
39
90°
W
30°
S
15°
S
0°
15°
N
40
90°
W
30°
S
15°
S
0°
15°
N
41
90°
W
30°
S
15°
S
0°
15°
N
42
90°
W
30°
S
15°
S
0°
15°
N
18-Jan-2009 15:18:50
18-Jan-2009 15:19:20
18-Jan-2009 15:19:05
18-Jan-2009 15:19:35
qf=2
qf=0
qf=1
qf=1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
1
3
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
38
90°
W
30°
S
15°
S
0°
15°
N
18-Jan-2009 15:18:35
qf=2
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
10.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
37
90°
W
15°
S
0°
15°
N
18-Jan-2009 15:18:20
qf=2
Figura I.2 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
a) b) c) d) e)
68

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
4
2
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
11
13
8
2
4
5
9
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
47
90°
W
30°
S
15°
S
0°
15°
N
48
90°
W
30°
S
15°
S
0°
15°
N
18-Jan-2009 15:20:50
18-Jan-2009 15:21:05
qf=0
qf=0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
2
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
4
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
2
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
43
90°
W
30°
S
15°
S
0°
15°
N
44
90°
W
30°
S
15°
S
0°
15°
N
45
90°
W
30°
S
15°
S
0°
15°
N
46
90°
W
30°
S
15°
S
0°
15°
N
18-Jan-2009 15:19:50
18-Jan-2009 15:20:20
18-Jan-2009 15:20:05
18-Jan-2009 15:20:35
qf=0
qf=0
qf=0
qf=0
Figura I.3 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
a) b) c) d) e)
69

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
4
15
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
1
3
5 10
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
25
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
9
4
2
5
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1
4
5
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
10
2
4
57
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
49
90°
W
30°
S
15°
S
0°
15°
N
50
90°
W
30°
S
15°
S
0°
51
90°
W
30°
S
15°
S
0°
52
90°
W
30°
S
15°
S
0°
53
90°
W
30°
S
15°
S
0°
54
90°
W
30°
S
15°
S
0°
18-Jan-2009 15:21:20
18-Jan-2009 15:21:50
18-Jan-2009 15:22:20
18-Jan-2009 15:21:35
18-Jan-2009 15:22:05
18-Jan-2009 15:22:35
qf=0
qf=0
qf=0
qf=0
qf=0
qf=0
Figura I.4 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
a) b) c) d) e)
70
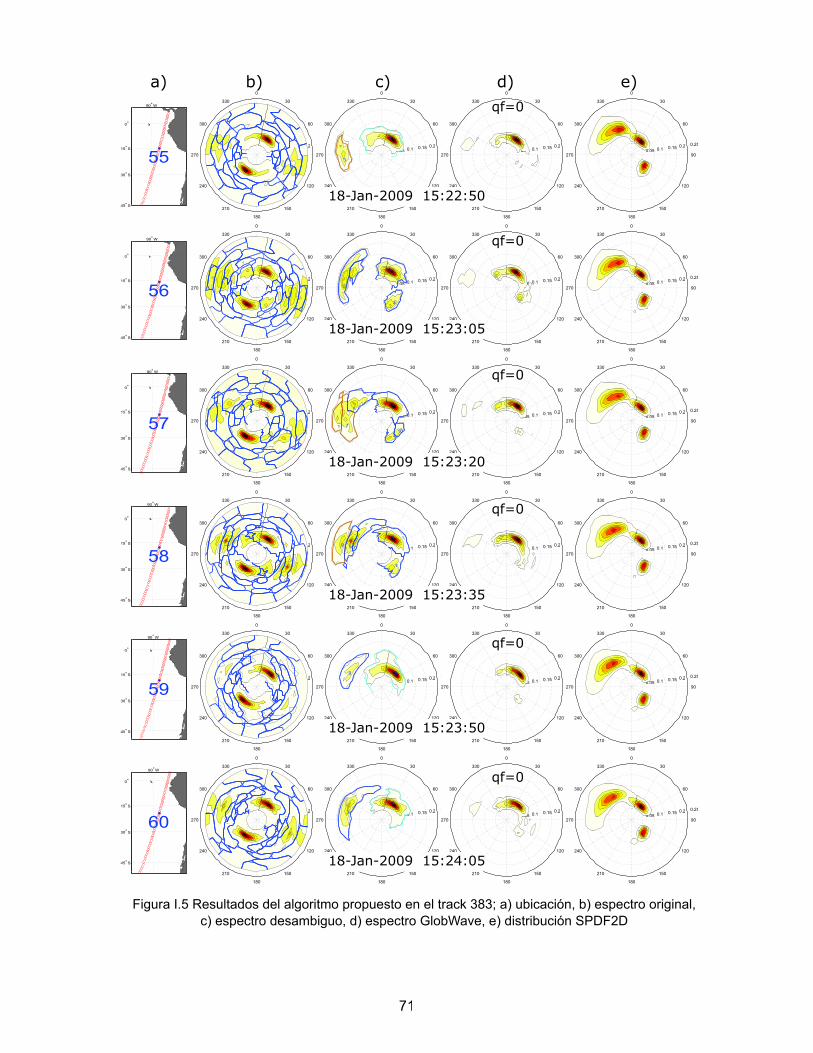
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
3
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
4
57
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
711
2
4
5
10
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
9
2
3
5 7 0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
23
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
30.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
55
90°
W
45°
S
30°
S
15°
S
0°
56
90°
W
45°
S
30°
S
15°
S
0°
57
90°
W
45°
S
30°
S
15°
S
0°
58
90°
W
45°
S
30°
S
15°
S
0°
59
90°
W
45°
S
30°
S
15°
S
0°
60
90°
W
45°
S
30°
S
15°
S
0°
18-Jan-2009 15:22:50
18-Jan-2009 15:23:20
18-Jan-2009 15:23:50
18-Jan-2009 15:23:05
18-Jan-2009 15:23:35
18-Jan-2009 15:24:05
qf=0
qf=0
qf=0
qf=0
qf=0
qf=0
a) b) c) d) e)
Figura I.5 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
71

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
89
1
3
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
23
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1
6
3
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
11
2
3
5
90.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
63
90°
W
45°
S
30°
S
15°
S
0°
64
90°
W
45°
S
30°
S
15°
S
0°
65
90°
W
45°
S
30°
S
15°
S
0°
66
90°
W
45°
S
30°
S
15°
S
0°
18-Jan-2009 15:24:50
18-Jan-2009 15:25:20
18-Jan-2009 15:25:05
18-Jan-2009 15:25:35
qf=0
qf=0
qf=0
qf=0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
4
50.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1
4
6
7
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
61
90°
W
45°
S
30°
S
15°
S
0°
62
90°
W
45°
S
30°
S
15°
S
0°
18-Jan-2009 15:24:20
18-Jan-2009 15:24:35
qf=0
qf=0
a) b) c) d) e)
Figura I.6 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
72

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
2
4
510
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
10
11
2
35
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
71
90°
W
45°
S
30°
S
15°
S
72
90°
W
60°
S
45°
S
30°
S
15°
S
18-Jan-2009 15:26:50
18-Jan-2009 15:27:05
qf=0
qf=0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
3
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
1
4
50.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
12
2
4
59
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
10
2
4
5
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
67
90°
W
45°
S
30°
S
15°
S
68
90°
W
45°
S
30°
S
15°
S
69
90°
W
45°
S
30°
S
15°
S
70
90°
W
45°
S
30°
S
15°
S
18-Jan-2009 15:25:50
18-Jan-2009 15:26:20
18-Jan-2009 15:26:05
18-Jan-2009 15:26:35
qf=0
qf=0
qf=0
qf=0
a) b) c) d) e)
Figura I.7 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
73
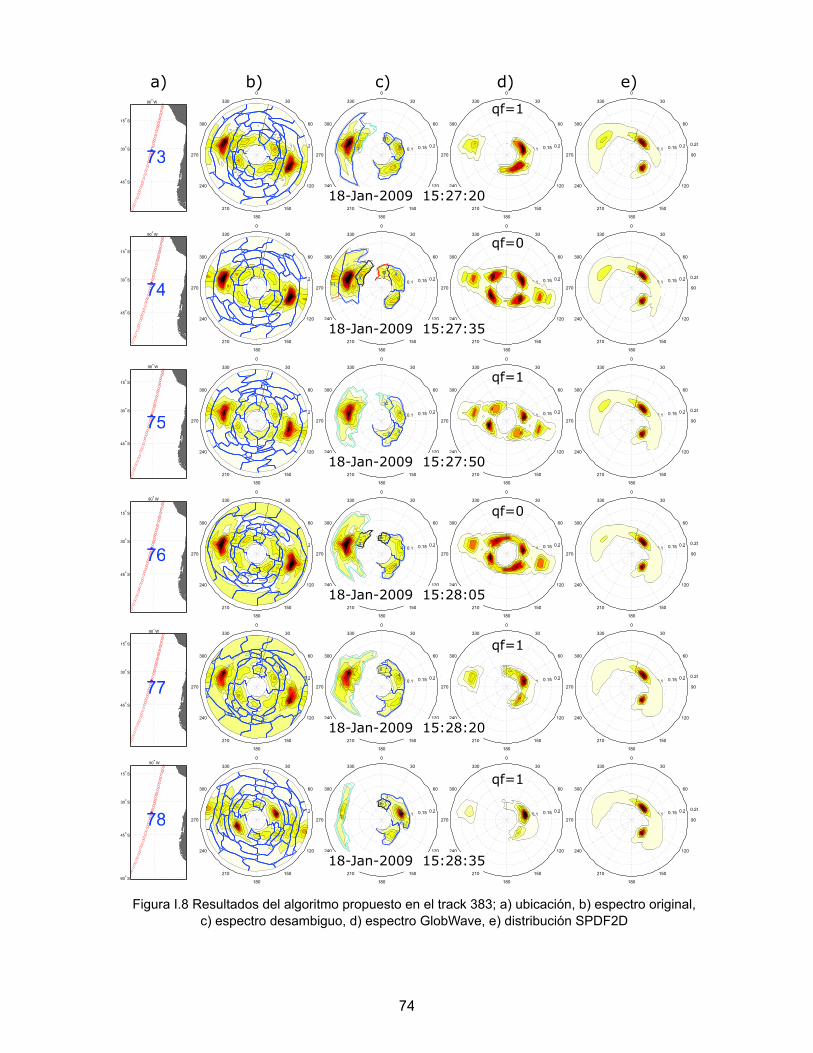
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
1
3 6
10
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
89
11 1
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1
10
4
58
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
9
14
5
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
14
5
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
7
2
3
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
73
90°
W
45°
S
30°
S
15°
S
74
90°
W
45°
S
30°
S
15°
S
75
90°
W
45°
S
30°
S
15°
S
76
90°
W
45°
S
30°
S
15°
S
77
90°
W
45°
S
30°
S
15°
S
78
90°
W
60°
S
45°
S
30°
S
15°
S
18-Jan-2009 15:27:20
18-Jan-2009 15:27:50
18-Jan-2009 15:28:20
18-Jan-2009 15:27:35
18-Jan-2009 15:28:05
18-Jan-2009 15:28:35
qf=1
qf=0
qf=1
qf=1
qf=0
qf=1
a) b) c) d) e)
Figura I.8 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
74
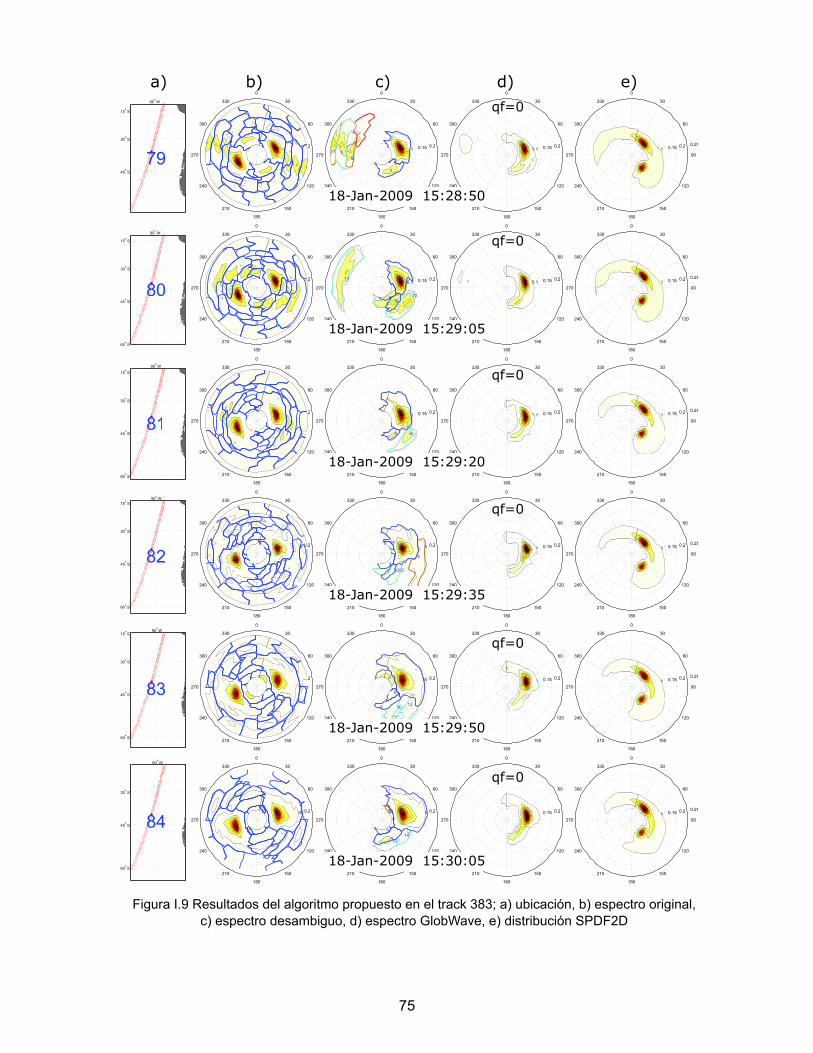
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
7
9
11 5
2
3
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
10
11 2
68
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
2
4
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
7 12
1
4
10
14
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
3
1012
2
6
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
12
10
14
2
4
5
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
79
90°
W
45°
S
30°
S
15°
S
80
90°
W
60°
S
45°
S
30°
S
15°
S
81
90°
W
60°
S
45°
S
30°
S
15°
S
82
90°
W
60°
S
45°
S
30°
S
15°
S
83
90°
W
60°
S
45°
S
30°
S
15°
S
84
90°
W
60°
S
45°
S
30°
S
18-Jan-2009 15:28:50
18-Jan-2009 15:29:20
18-Jan-2009 15:29:50
18-Jan-2009 15:29:05
18-Jan-2009 15:29:35
18-Jan-2009 15:30:05
qf=0
qf=0
qf=0
qf=0
qf=0
qf=0
a) b) c) d) e)
Figura I.9 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
75

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
10
2
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
82
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4 82
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1468
12
2
3
10
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
87
90°
W
60°
S
45°
S
30°
S
88
90°
W
60°
S
45°
S
30°
S
89
90°
W
60°
S
45°
S
30°
S
90
90°
W
60°
S
45°
S
30°
S
18-Jan-2009 15:30:50
18-Jan-2009 15:31:20
18-Jan-2009 15:31:05
18-Jan-2009 15:31:35
qf=0
qf=0
qf=1
qf=0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6 1
3 8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
86
10
2
4
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
85
90°
W
60°
S
45°
S
30°
S
86
90°
W
60°
S
45°
S
30°
S
18-Jan-2009 15:30:20
18-Jan-2009 15:30:35
qf=0
qf=0
a) b) c) d) e)
Figura I.10 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
76
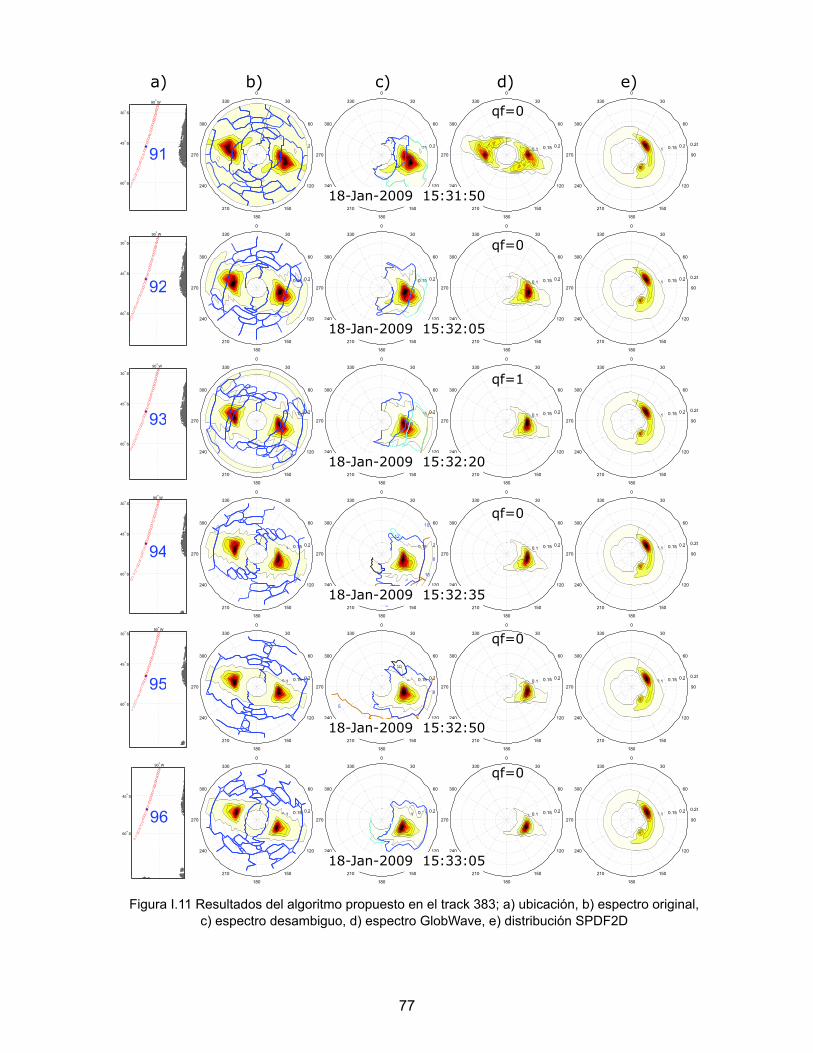
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
10
4
5
81
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
3
2
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
95
90°
W
60°
S
45°
S
30°
S
96
90°
W
60°
S
45°
S
18-Jan-2009 15:32:50
18-Jan-2009 15:33:05
qf=0
qf=0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
24
5
7
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
62
4
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
4 62
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
3
6
8
10
14
16
12
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
91
90°
W
60°
S
45°
S
30°
S
92
90°
W
60°
S
45°
S
30°
S
93
90°
W
60°
S
45°
S
30°
S
94
90°
W
60°
S
45°
S
30°
S
18-Jan-2009 15:31:50
18-Jan-2009 15:32:20
18-Jan-2009 15:32:05
18-Jan-2009 15:32:35
qf=1
qf=0
qf=0
qf=0
a) b) c) d) e)
Figura I.11 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
77
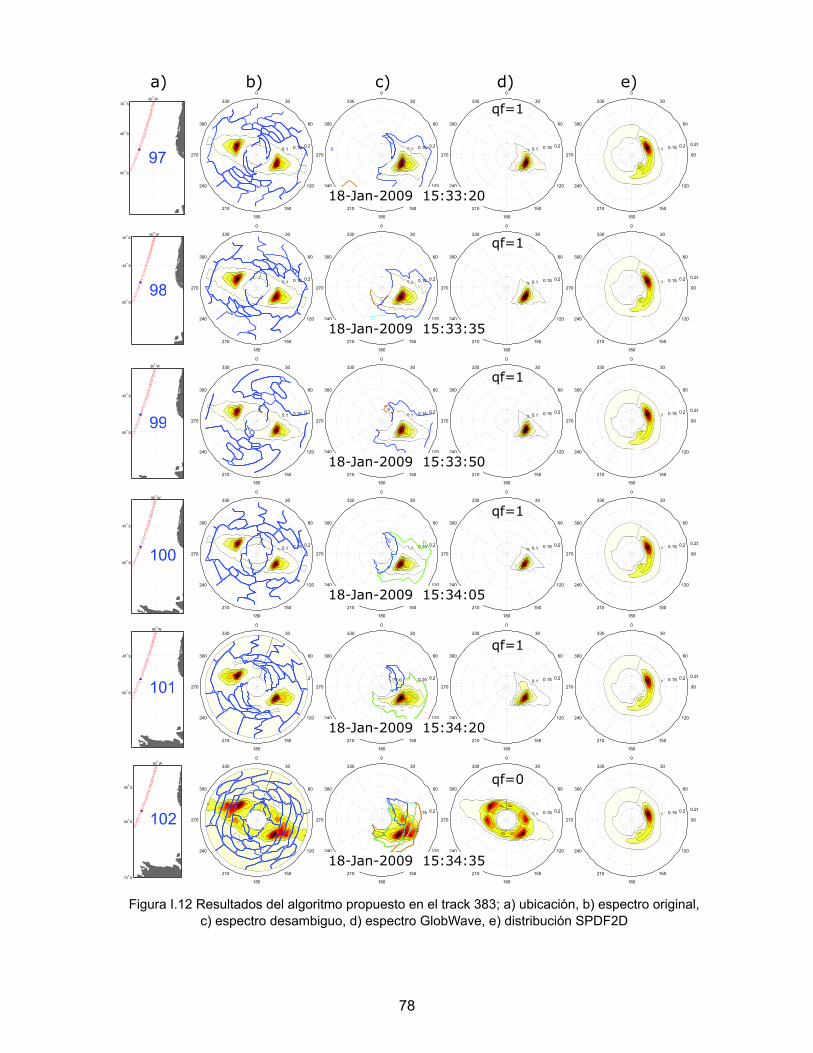
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
8
10
2
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
3
6
2
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
2
4
6
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
1
4 60.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
5128
9
2
4 0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
97
90°
W
60°
S
45°
S
30°
S
98
90°
W
60°
S
45°
S
30°
S
99
90°
W
60°
S
45°
S
100
90°
W
60°
S
45°
S
101
90°
W
60°
S
45°
S
102
90°
W
75°
S
60°
S
45°
S
18-Jan-2009 15:33:20
18-Jan-2009 15:33:50
18-Jan-2009 15:34:20
18-Jan-2009 15:33:35
18-Jan-2009 15:34:05
18-Jan-2009 15:34:35
qf=1
qf=1
qf=1
qf=1
qf=1
qf=0
Figura I.12 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
a) b) c) d) e)
78

0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
45
2
7
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
14
2
6
7
10
12
16
4 0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
5
1
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
4
8
2
10
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
4
9
2
6
8
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
6
7
420.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
0.05 0.1 0.15 0.2 0.25
30
210
60
240
90270
120
300
150
330
180
0
103
90°
W
60°
S
45°
S
30°
S
104
90°
W
60°
S
45°
S
105
90°
W
60°
S
45°
S
106
90°
W
60°
S
45°
S
107
90°
W
60°
S
45°
S
108
90°
W
60°
S
45°
S
18-Jan-2009 15:34:50
18-Jan-2009 15:35:20
18-Jan-2009 15:35:50
18-Jan-2009 15:35:05
18-Jan-2009 15:35:35
18-Jan-2009 15:36:05
qf=0
qf=0
qf=0
qf=0
qf=0
qf=2
Figura I.13 Resultados del algoritmo propuesto en el track 383; a) ubicación, b) espectro original,
c) espectro desambiguo, d) espectro GlobWave, e) distribución SPDF2D
a) b) c) d) e)
79
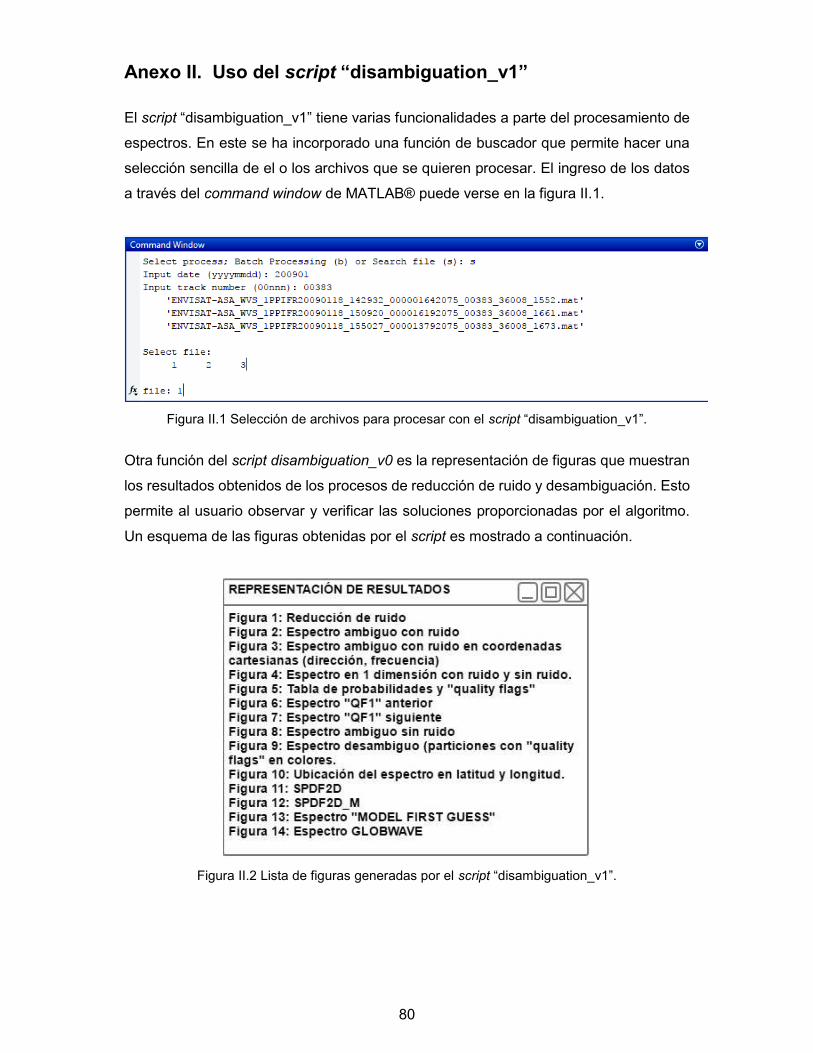
80
Anexo II. Uso del script “disambiguation_v1”
El script “disambiguation_v1” tiene varias funcionalidades a parte del procesamiento de
espectros. En este se ha incorporado una función de buscador que permite hacer una
selección sencilla de el o los archivos que se quieren procesar. El ingreso de los datos
a través del command window de MATLAB® puede verse en la figura II.1.
Figura II.1 Selección de archivos para procesar con el script “disambiguation_v1”.
Otra función del script disambiguation_v0 es la representación de figuras que muestran
los resultados obtenidos de los procesos de reducción de ruido y desambiguación. Esto
permite al usuario observar y verificar las soluciones proporcionadas por el algoritmo.
Un esquema de las figuras obtenidas por el script es mostrado a continuación.
Figura II.2 Lista de figuras generadas por el script “disambiguation_v1”.

81
Anexo III. Uso del software NEST
Registro
La descarga del software NEST (Next ESA SAR Toolbox) para el manejo de archivos
en formato N1 requiere del registro como usuario de productos ESA en el siguiente
enlace: https://eo-sso-idp.eo.esa.int/idp/umsso20/admin. Haciendo clic en la opción
login se procede al registro gratuito proveyendo todos los datos necesarios y siguiendo
los pasos indicados en el enlace.
Descarga e instalación
Una vez registrado el usuario, se accede a la página:
https://earth.esa.int/web/nest/home. y se utiliza el nombre de usuario y contraseña en la
opción login ubicada en la parte superior derecha. Luego de que se ha ingresado como
usuario, se accede a la pestaña Downloads y se escoge la opción Latest release. La
última versión del programa al momento es: NEST Version 5.1. Luego se elige el
instalador de acuerdo al sistema operativo usado y se confirma la descarga.
La instalación se realiza por defecto con el asistente de instalación de windows o usando
el command line en linux.
Figura III.1 Página de descarga del software NEST.
82
Recomendaciones de uso
Se recomienda hacer los procesos de conversión de archivos con el software NEST en
cualquier distribución del sistema operativo Linux, debido a que el software presentó
errores por falta de memoria y procesos incompletos en el sistema operativo Windows.
En linux se recomienda el uso del comando “find <dir1> -type f -exec cp {} <dir2>/ \” para
extraer los archivos de sus carpetas correspondientes y agregarlos al batch processing.
Los archivos obtenidos luego del proceso estarán aún en extensión N1 debido a que el
software no cambia el nombre de los archivos automáticamente. Para solucionar este
problema se recomienda usar herramientas que cambien recursivamente los nombres
de los archivos. En linux se sugiere el uso del comando “$ rename -v 's/\.N1$/\.nc/' *.N1”
ejecutado en el command line dentro de la carpeta respectiva.
El software NEST tiene un límite en la capacidad de procesamiento debido al alto uso
de memoria RAM, es necesario que el usuario verifique la capacidad de procesamiento
de su computador. El límite de procesamiento de archivos N1, probado empíricamente
está en el rango de 700 a 800 archivos en un solo proceso, con un tiempo de cálculo de
aproximadamente 8 horas.

83
Anexo IV. Parámetros de los instrumentos y datos SAR en el
satélite EnviSat
Tabla IV.1 Parámetros de los instrumentos SAR
Parámetro Características
Instrumento SAR ASAR
Lanzamiento 2002
Altura de orbita ℎ/ 799.8 Km
Tamaño de la antena ¯z J °z 10 m x 1.3 m
Banda en el espectro de microondas C
Longitud de onda 5.623 cm
Frecuencia 5.331 GHz
Ancho de banda hasta 16 Mhz
Frecuencia de repetición de pulsos (PRF) 1650 – 2100 Hz
Polarización VV o HH
Distancia tierra - track 200 Km – 730 Km
Velocidad de la plataforma en orbita |/ 7450 m/s
Periodo de orbita 100.59 min
Orbitas por día 14.31
tamaño de la huella en rango Uy hasta 400 Km
Resolución geométrica en tierra 30 m x 30 m (image mode); hasta 1000
m x 1000 m (global mode)
Modos de datos SAR disponibles Global monitoring, Wide swath, Image,
Alternating polarization, Wave.
Distancia entre dos imágenes
consecutivas 100 Km (15 segundos)
Cobertura diaria ≈ 2200 imagettes
Datos en wave mode disponibles Cross/wave spectra
Imagettes (SLC)
Malla espectral Polar
Número de sectores de longitud de
onda 24
Espaciamiento de longitud de onda logarítmica
Rango de longitud de onda 30 m a 800 m
Número de sectores direccionales 18 / 36
Ancho del sector direccional 10°
Rango direccional 0° a 180° / 360°

84