f orb attrad f orbr anningsstabilitet i ebk f or turbo...
TRANSCRIPT

Forbattrad forbranningsstabilitet iEBK for turboflaktmotor RM12 genom
forandrad motorreglering
Examensarbete utfort i Reglerteknikvid Tekniska Hogskolan i Linkoping
av
Jonas Ervestrand
Reg nr: LiTH-ISY-EX–05/3743–SELinkoping 2005


Forbattrad forbranningsstabilitet iEBK for turboflaktmotor RM12 genom
forandrad motorreglering
Examensarbete utfort i Reglerteknikvid Tekniska Hogskolan i Linkoping
av
Jonas Ervestrand
LiTH-ISY-EX–05/3743–SE
Handledare: Dr. Torbjorn NorlanderLic. Jonas Gillberg
Examinator: Dr. Mikael Norrlof
Linkoping 30 mars 2005.


Avdelning, Institution Division, Department
Institutionen för systemteknik 581 83 LINKÖPING
Datum Date 2005-04-01
Språk Language
Rapporttyp Report category
ISBN
X Svenska/Swedish Engelska/English
Licentiatavhandling X Examensarbete
ISRN LITH-ISY-EX--05/3743--SE
C-uppsats D-uppsats
Serietitel och serienummer Title of series, numbering
ISSN
Övrig rapport ____
URL för elektronisk version http://www.ep.liu.se/exjobb/isy/2005/3743/
Titel Title
Förbättrad förbränningsstabilitet i EBK för turbofläktmotor RM12 genom förändrad motorreglering Improved afterburner combustion stability for turbofan engine RM12 by modified engine control
Författare Author
Jonas Ervestrand
Sammanfattning Abstract The engine of JAS 39 Gripen, RM12, has recently been equipped with a new flameholder and a new engine inlet. This change has caused an increased noise level from the engine when the afterburner is in use. The noise level reaches its peak when the afterburner is partially used. The problem is thought to be unstable combustion in the regions around the flameholder. A solution to the problem has been proposed by Volvo Aero. The idea is to modify the software in the engine control unit (FADEC) that changes the airflows in the engine. This master thesis implements the proposed changes and analyzes the effects of this implementation. The analysis is done by simulations of a model of the engine that Volvo Aero has created and implemented in MatrixX/SystemBuild. Simulations showed that it is possible to achieve the desired result by the software changes. Further the simulations showed some problems with stability for the engine when controlled by the modified control unit. This was solved by implementing a filter in the FADEC software.
Nyckelord Keyword RM12, efterbrännkammare, jetmotor, motorreglering


Sammanfattning
JAS 39 Gripen:s motor, RM12, har nyligen forsetts med en ny flamhallare samten ny inloppsdel. Detta har resulterat i ett okat motorljud da motorns efter-brannkammare anvands. Det okade motorljudet hors som mest da efterbrannkammarenutnyttjas till cirka halften av sin maximala utnyttjandegrad. Problemet tros beropa instabil forbranning i ett omradet runt flamhallaren. Ett forslag som syftartill att forandra forhallandet mellan luftflodena i motorn har tagits fram av VolvoAero. Denna forandring gors genom att andra den mjukvara som motorns styrenhet(FADEC) anvander sig av. Syftet med detta examensarbete ar att implementeradessa forandringar samt att analysera vilka resultat detta kan ge. Analysen hargjorts genom simuleringar av en motormodell av RM12 som ar implementerad iMatrixX/SystemBuild och framtagen av Volvo Aero. Simuleringarna visar att detar mojligt att uppna onskad effekt genom de foreslagna andringarna. Under simu-leringarna framkom att losningen hade vissa problem med stabilitet vid ett visstarbetsomrade. Detta lostes genom att utoka mjukvaran till FADEC med ett filter.
Abstract
The engine of JAS 39 Gripen, RM12, has recently been equipped with a newflameholder and a new engine inlet. This change has caused an increased noiselevel from the engine when the afterburner is in use. The noise level reaches itspeak when the afterburner is partially used. The problem is thought to be unstablecombustion in the regions around the flameholder. A solution to the problem hasbeen proposed by Volvo Aero. The idea is to modify the software in the enginecontrol unit (FADEC) that changes the airflows in the engine. This master thesisimplements the proposed changes and analyzes the effects of this implementation.The analysis is done by simulations of a model of the engine that Volvo Aerohas created and implemented in MatrixX/SystemBuild. Simulations showed thatit is possible to achieve the desired result by the software changes. Further thesimulations showed some problems with stability for the engine when controlled bythe modified control unit. This was solved by implementing a filter in the FADECsoftware.
i

ii

Tackord
Jag vill har passa pa att tacka dem som pa ett eller annat satt hjalpt mig medgenomforandet av mitt examensarbete. Forst och framst vill jag tacka min han-dledare Dr. Torbjorn Norlander (Volvo Aero Corporation) for att han talmodigtsvarat pa fragor och delat med sig av sin kunskap. Jag vill aven tacka Lic. JonasGillberg och Dr. Mikael Norrlof (LiTH) for deras stod fran skolans sida.
Darefter vill jag tacka alla dem pa avdelning 7164 Motorsystem som har hjalptmig under arbetets gang.
Slutligen vill jag tacka Josefina Stenstam for stod och uppmuntran.
Trollhattan 30 mars 2005Jonas Ervestrand
iii

iv

Notation
Operatorer
Namn Beskrivning
s Laplacevariabelnz Z-transformvariabeln
v

Forkortningar
Forkortning Forklaring
A8 Utloppsmunstyckets areaA8 ADJ TAB Tabell for justering av dragkraftA8 SCLR FILT JM Konstant for bortkoppling av filterA8 SCLR JM Storlek pa areajusteringA8T5 SCLR Reglerar okning av BPRBEACON Kodgenereringsprogram for konstruktion av mjukvara till FADECBPR ByPassRatio (Bypass-forhallande)CA8CDMDS Modul for berakning av ZA8 DMD SELCA8CMULT Modul for berakning av ZA8 K WFRCELCMULT Modul for berakning av A8T5 SCLRCELCT5DM Modul for berakning av T5 REFEAB EBK-verkningsgradEBK Efterbrannkammare.FADEC Full Authority Digital Engine ControllerFASTC FADEC Application Software for Test from CFI Flight IdleFMV Forsvarets MatrielVerkFTG FlygTomGangGI Ground IdleIRP Intermediate Rating PointMS Max slackt, fullt motorpadrag utan EBK.MT Max tand, fullt motorpadrag med max tand EBK.NH Varvtal for hogtrycksrotorNL Varvtal for lagtrycksrotorPLA Power Level Angle (manoverarmsvinkel)PS16D Trycksvangningsniva i EBKPT56 Tryck i EBKPT0 OmgivningstryckPT0 MULT Reglerar dragkraftskompenseringRM12 ReaktionsMotor 12SLS Sea-Level StaticT1 OmgivningstemperaturT1 MULT Reglerar dragkraftskompenseringT5 TurbnitemperaturT5 REF Referensvarde for turbintemperaturVAC Volvo Aero CorporationWFM Weight of Fuel to MainWFR HOLD Indikator pa om EBK ar tandWFR Weight of Fuel to ReheaterZA8 K WFR Justerat aterkopplat varde pa utloppsareaZA8 DMD SEL Referensvarde for utloppsareaZA8 SEL Aterkopplat varde pa utloppsarea
vi

Innehall
1 Inledning 11.1 Bakgrund . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Problemformulering . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3 Mal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Metod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.5 Tidigare arbete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 RM12 52.1 Principer for jetmotor . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Motormoduler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1 Flakt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2.2 Kompressor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.3 Vaxellada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.4 Brannkammare . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.5 HT-turbin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.6 LT-turbin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.7 Efterbrannkammare . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Motorsstyrsystemet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.1 Motorns styrsignaler . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 Sammanfattning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Forandrad motorstyrning 133.1 Inledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Positiva effekter fran ett okat bypass-forhallande . . . . . . . . . . . 133.3 Hur okas bypass-forhallandet . . . . . . . . . . . . . . . . . . . . . . 143.4 FADEC funktionalitet . . . . . . . . . . . . . . . . . . . . . . . . . . 143.5 Modul CELCMULT . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.6 Sankning av T5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.7 Justering av A8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.8 Dragkraftskompensering . . . . . . . . . . . . . . . . . . . . . . . . . 163.9 Justering av EBK-bransleflode . . . . . . . . . . . . . . . . . . . . . 17
3.9.1 Bakgrund . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.9.2 Justering av bransleflodestabell . . . . . . . . . . . . . . . . . 17
vii

viii Innehall
3.9.3 Resultat av forsok med justerat EBK-bransleflode . . . . . . 173.10 Sammanfattning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Modellering 214.1 Modifierade moduler . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.2 Trycksvangningssimulator . . . . . . . . . . . . . . . . . . . . . . . . 224.3 Sammanfattning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5 Analys av stabilitet 255.1 Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.2 Modell av aterkoppling . . . . . . . . . . . . . . . . . . . . . . . . . . 255.3 Modifierad modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.4 Olinjar aterkoppling . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.5 Atgarder mot instabilitet . . . . . . . . . . . . . . . . . . . . . . . . 29
5.5.1 Justering av tabell . . . . . . . . . . . . . . . . . . . . . . . . 295.5.2 Inforande av filter . . . . . . . . . . . . . . . . . . . . . . . . 30
5.6 Slutsats av analys av stabilitet . . . . . . . . . . . . . . . . . . . . . 35
6 Simuleringar av motormodell 376.1 Motorsimuleringsmojligheter . . . . . . . . . . . . . . . . . . . . . . . 376.2 Simulering i PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386.3 Simulering med olika temperatur, tryck och machtal . . . . . . . . . 386.4 Simulering med olika gaspadrag . . . . . . . . . . . . . . . . . . . . . 396.5 Slutsatser av simuleringsforsok . . . . . . . . . . . . . . . . . . . . . 40
7 Slutsatser 437.1 Resultat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437.2 Forslag till fortsatt arbete . . . . . . . . . . . . . . . . . . . . . . . . 437.3 Uppfyllda mal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
A Modell 47
B Moduler 49
C Simuleringsresultat 53
D Frekvensanalys 63

Innehall ix
Figurer
2.1 Genomskarning av motor RM12 . . . . . . . . . . . . . . . . . . . . . 62.2 Motormoduler i RM12 . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Sensor och aktuatorpossitioner, motor RM12 . . . . . . . . . . . . . 12
3.1 A8T5 SCLR som funktion av PT0, T1 och ZA8 K WRF. . . . . . . 163.2 Referensvardet for branslemangd till EBK under ett padrag fran MS
till MT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3 Forandring i dragkraft da branslemangd till EBK andras . . . . . . . 19
4.1 Modell som simulerar PS16D utifran motordata . . . . . . . . . . . . 23
5.1 Modell av reglerloop for A8-reglering . . . . . . . . . . . . . . . . . . 265.2 A8-reglerloop modifierad genom aterkoppling med konstant K . . . . 275.3 Det aterkopplade vardet som funktion av ZA8 K WFR. . . . . . . . 275.4 Stegsvar som visar stabilitetsgrans for aterkoppling. . . . . . . . . . 285.5 A8-reglerloop modifierad genom olinjar aterkoppling. . . . . . . . . . 295.6 Simulering som visar stabilitetsproblem vid tva stallen. . . . . . . . 305.7 Justerad tabell som atgard mot instabilitet. . . . . . . . . . . . . . . 315.8 Simulering med justerad tabell. . . . . . . . . . . . . . . . . . . . . . 315.9 Ytterligare justeringar pa tabell mot instabilitet. . . . . . . . . . . . 325.10 Slutlig simulering med justerad tabell. . . . . . . . . . . . . . . . . . 325.11 Frekvensalanalys av signalen ZA8 K WFR visar att den dominerande
frekvensen ar ca 3 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . 335.12 Bestamning av frekvens pa instabil svangning med hjalp av spek-
traltathet ger ett noggrannare varde pa frekvensen. Frekvensen bestamstill 2.9 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.13 Filterkarakteristik for filter mot instabilitet. . . . . . . . . . . . . . . 355.14 A8-reglerloop modifierad genom (1) inforande av Look-Up Table1
med tabellvarden enligt Figur 5.3a samt (2) inforande av filter H1(z)(5.9) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.15 Simulering av reglerloop med filter. . . . . . . . . . . . . . . . . . . . 36
6.1 Simuleringsresultat vid transientpadrag . . . . . . . . . . . . . . . . 41
A.1 RM12 SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47A.2 Delmodell RM12 till RM12 SYSTEM . . . . . . . . . . . . . . . . . 48
B.1 Modul CELCMULT. . . . . . . . . . . . . . . . . . . . . . . . . . . . 50B.2 Modul CELCT5DM. . . . . . . . . . . . . . . . . . . . . . . . . . . . 50B.3 Modul CA8CDMDS. . . . . . . . . . . . . . . . . . . . . . . . . . . . 51B.4 Modul CA8CMULT. . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
C.1 Bypassforhallandet for varierande inloppstemperaturer. . . . . . . . 53

x Innehall
C.2 PS16D (trycksvangningsamplitud) for varierande inloppstempera-turer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
C.3 PS16D´s storlek i procent i forhallande till PT56 (totaltryck efterturbiner). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
C.4 PS16D for varierande ZA8 K WFR . . . . . . . . . . . . . . . . . . . 56C.5 Simulering i PC med olika gaspadrag. . . . . . . . . . . . . . . . . . 57C.6 Simulering i PC med gaspadrag fran MS till MT langsamt under 10
sekunder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58C.7 Simulering i PC med gaspadrag fran MS till MT som ett slampadrag. 59C.8 Simulering i PC med gaspadrag fran MS till PLA 115◦ som ett
stegpadrag. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60C.9 Simulering i PC med gaspadrag fran MS till MT som visar skillnaden
mellan att anvanda filter 5.9 och utan. . . . . . . . . . . . . . . . . . 61
D.1 Bestamning av sjalvsvangningsfrekvens. . . . . . . . . . . . . . . . . 63D.2 Bestamning av sjalvsvangningsfrekvens. . . . . . . . . . . . . . . . . 64D.3 Bestamning av sjalvsvangningsfrekvens. . . . . . . . . . . . . . . . . 64

Kapitel 1
Inledning
1.1 Bakgrund
Volvo Aero har en lang historia bakom sig betraffande tillverkning av motorer tillsvenska flygvapnet. Den forsta bestallningen om 40 nio-cylindriga flygmotorer komredan 1930 till davarande lokomotivtillverkaren Nydqvist & Holm i Trollhattan.Ett villkor i samband med affaren var dock att ett fristaende bolag bildades fortillverkningen, vilket ocksa gjordes samma ar nar Nohab Flygmotorfabriker star-tades. Ar 1946 borjade den forsta jetmotorn Goblin, eller RM1A som den svenskabeteckningen var, att tillverkas pa licens fran De Havilland Engine Co. Utvecklin-gen och tillverkningen har darefter fortsatt och idag tillverkas den militara motornRM12 som sitter i JAS 39 Gripen. Foretaget bytte 1970 namn till Volvo FlygmotorAB och 1994 antogs dagens namn Volvo Aero Corporation. Den militara grenenav foretagets verksamhet har stadigt minskat fran att ha varit huvudverksamhetentill att idag sta for en relativt begransad del av Volvo Aero:s totala omsattning.Det ar dock viktigt att fortsatta underhalla och utveckla de militara produkter somfortfarande finns kvar da det genererar vardefull kompetens som kan anvandas vidutveckling av bade militara och civila produkter i framtiden. [Aer05]
1.2 Problemformulering
RM12 har nyligen forsetts med en ny inloppsdel samt en ny flammhallare. Det-ta har under vissa flygforhallande resulterat i att piloten upplever ett hogre ljudfran motorn. Ljudet som formodas bero pa tryckvaritationer i efterbrannkammaren(EBK) intraffar endast under EBK padrag och ar som starkast nagonstans mittemellan minimal och maximal tand EBK. FMV, som ar bestallare av RM12, hargett Volvo Aero i uppdrag att atgarda detta. Det har examensarbetet syftar tillatt undersoka vilka mojligheter som finns att via mjukvaruforandringar i RM12:sreglersystem avlagsna problemet. Som utgangspunkt for forandringarna kommerett givet forslag fran Volvo Aero att anvandas. Detta bygger pa att en sankning
1

2 Inledning
av turbintemperaturen med 50 Kelvin tillsammans med en okning av utloppsareanom 10% skulle leda till en sankning av motorljudet. Forslaget innefattar aven enkompensering mot forlust av dragkraft som uppkommer av den sankta turbintem-peraturen.
1.3 Mal
Malet med examensarbetet ar att undersoka vilka mojligheter som finns att sankade trycksvangningar som uppstar i EBK genom att oka forhallandet mellan luft-strommen som passerar vid sidan om karnmotorn och den som passerar igenomdensamma, benamnt bypassforhallande. De fragor som skall besvaras ar:
1. Kan en forandring av foreslagna parametrar astadkomma onskad effekt?
• Svaret fas genom att implementera forandringarna
• Hur paverkar det systemet? (analyseras genom simulering)
• Uppfyller systemet kraven?
2. Finns det andra reglerstrategier som erhaller samma resultat (eller battre)men som har battre egenskaper i andra avseenden?
1.4 Metod
Utvecklingen av de nya reglerfunktionerna kommer att goras i simuleringsprogram-met MatrixX/SystemBuild. Utgangspunkten kommer att vara den befintliga mod-ellen av RM12 som finns implementerad i SystemBuild. Som ett forsta steg mod-elleras nya reglerfunktioner i SystemBuild. Dar kan simuleringar sedan goras, foratt verifiera att onskat resultat erhalls. Da onskat resultat uppnas kommer de nyafunktionerna modelleras i ett utvecklingsprogram som heter Beacon. Detta programanvands for att skapa kod som senare kan lankas och kompileras till en exekverbarfil som motorns styrenhet (FADEC) anvander for reglering av motor RM12. Simu-leringar i SystemBuild kommer att goras med den nya FADEC-mjukvaran for attverifiera att resultatet blir det onskade.
1.5 Tidigare arbete
Da denna forandring av motorljud inte har upplevts som ett problem tidigare forde motorer som inte har forsetts med ny inloppsdel samt ny flamhallare har helleringa arbeten kring detta utforts. Detta ar aven forsta gangen ny programvarafor FADEC utvecklas helt och hallet inom Volvo Aero. Det som har gjort dettamojligt ar att Volvo Aero har utvecklat ett nytt verktyg for att kompilera ochlanka ihop C-kod till ett komplett korbart program som kan exekveras i FADEC.Detta har i sin tur medfort att den riktiga hardvaran kan anvandas vid simuleringar

1.5 Tidigare arbete 3
i realtidssimuleringsutrustning samt aven vid motorprov med riktig motor. Dennamojlighet underlattar avsevart utveckling av nya funktioner for FADEC da arbetetkan goras internt inom foretaget.

4 Inledning

Kapitel 2
RM12
Detta kapitel innehaller en beskrivning av motor RM12, dess uppbyggnad ochfunktion. Teknisk fakta for motorn ges i Tabell 2.1 samt Tabell 2.2.
RM12, som star for ReaktionsMotor 12 ar utvecklad av GE (General Elec-tric). Denna motor valdes till JAS 39 Gripen efter rekomendationer av Volvo Aero.Tillsammans med GE har Volvo Aero vidareutvecklat motorn for att mota dekrav som stalls pa enmotorapplikationer vad galler sakerhet, prestanda samt re-dundans. RM12 har genom denna modifiering bl.a. utrustats med en nagot storresamt forstarkt inloppsdel for att klara kollision med faglar av masstorlek samtett sekundart tandsystem for att minska risken for motorbortfall. Motorn styrsvia FADEC (Full Authority Digital Engine Control) och har ett hydromekanisktstyrsystem som backup ifall FADEC skulle fallera. [Cor98, Mat04]
2.1 Principer for jetmotor
Jetmotorns grundprincip bygger pa att luft accelereras bakat vilket genererar dragkraft.Luften leds in i motorn genom inloppsdelen vidare in i en trestegsflakt dar luftenstryck och temperatur okar. RM12 tillhor familjen turboflaktmotorer vilket innebaratt en del av luftflodet genom motorn inte passerar genom sjalva karnmotorn dar
Langd 4.04 mInloppsdiameter 0.709 mTorrvikt 1055 kgBypassforhallnade 0.3:1Totalt kompressionsforhallnade 27.5:1Max flaktvartal 13 300 rpmMax kompressorvarvtal 16 800 rpm
Tabell 2.1. Motordata RM12
5

6 RM12
Max dragkraft med EBK 80.5 kNMax dragkraft utan EBK 54.0 kNMin dragkraft (Tomgang) 1.45 kN
Tabell 2.2. Motorprestanda RM12
forbranningen sker. Istallet leds en del vid sidan av denna i en bypass-kanal for attsenare, efter lagtrycksturbinen, aterforas med den forbranda gasen. Denna uppdel-ning av luft sker efter flaktsteget dar ca 30% av luften fors vidare i bypasskanalen.Resterande luftflode passerar in i kompressorn dar tryck och temperatur okas yt-terligare i sju steg. Efter kompressorn leds luften in i brannkammaren dar denblandas med flygbransle fran 18 st branslespridare som sitter jamnt fordeladerunt brannkammaren. Luft/bransleblandningen antands och expanderar bakat mothogtrycksrotorn som genom rotation tar upp en del av den energi gasmassan in-nehaller. Hogtrycksrotorn som ar fast sammankopplad med kompressorn har tilluppgift att driva denna. Efter hogtrycksrotorn sitter lagtrycksrotorn som pa sammasatt driver flakten. Bade flakt och kompressor har justerbara ledskenor for att styraluftflodet optimalt under radande driftforhallande. Gasen strommar efter turbin-erna bakat och blandas med luften fran bypasskanalen i efterbrannkammaren. Denlamnar darefter motorn genom ett konvergent-divergent utloppsmunstycke sommed sin reglerbara area styrs for att erhalla optimal funktion. Vid vissa tillfallenkan ytterligare dragkraft behovas. Bransle kan da sprutas in i efterbrannkammarenoch antandas. Detta kan ge ett dragkraftstillskott pa upp till 50%, men verkn-ingsgraden ar lag och processen kraver mycket bransle, vilket gor att detta baraanvands under kortare perioder da extra mycket dragkraft behovs. [Wib04]
Figur 2.1. Genomskarning av motor RM12
2.2 Motormoduler
RM12 ar uppbyggd av ett antal olika moduler som ar enkla att montera och de-montera och som fritt kan bytas mellan de olika motorindividerna. Detta medfor

2.2 Motormoduler 7
korta driftsstopp da hela motorn inte behover skickas till verkstad for att atgardafel pa en enstaka modul. RM12:s moduler ar: [Gen05, Cor98]
Figur 2.2. Motormoduler i RM12
2.2.1 Flakt
Flaktmodulen som ar den framsta delen av motorn bestar av tre huvudkomponen-ter.
• Inloppsdel

8 RM12
• Flaktstator
• Flaktrotor
Inloppsdelen bestar av 15 stycken fasta ihaliga ledskenor. Pa bakkanten av dessafasta ledskenor finns rorliga ledskenor som kan justeras synkront via en stallring.Inloppsdelen ar forsedd med ett antal hal som sitter pa bakkanten av ledskenor-na samt runt om inloppskapan. Till dessa lufthal leds varm luft via kanaler frankompressorn for att forhindra att is bildas i motorn. Bakom inloppsdelen kom-mer flaktrotorn som bestar av tre flaktsteg med tillhorande ledskenor mellan varjesteg. Mellan steg ett och tva ar ledskenorna stallbara och justeras tillsammansmed inloppsdelens justerbara ledskenor. Runt flaktrotorn sitter flaktstatorn som arsammanfogad med skruvforband av tva halvor. For att minimera risken for att luftstrommar framat i motorn mellan rotorblad och flaktstator ar innervaggarna vidrotorbladens toppar behandlade med ett speciellt ytskikt som nots ner av bladtop-parna tills ett minimalt spel mellan toppar och vagg uppstar.
2.2.2 Kompressor
Kompressormodulen ar den del av motorn dar den storsta kompressionen av luftensker. Kompressormodulens huvudkomponenter ar
• Framre stativ
• Centrumvaxel
• Kompressorstator
• Kompressorrotor
• Brannkammarmantel
• Flaktmantel
• Motorfastring
Det ar i framre stativet som luften delas upp mellan kompressorn och bypasskanalendar ca 30% av luften passerar utanfor kompressorn. Framre stativet ar ocksa dendel dar krafterna fran motorn overfors till flygplanet. Bakom framre stativet sitterkompressorrotor och kompressorstator. Dessa fungerar pa samma satt som flaktensrotor och stator med den skillnaden att de bestar av sju steg istallet for tre.Mellan de tva forsta stegen finns justerbara ledskenor for att ge luften en op-timal instromningsvinkel for varje driftfall. Efter kompressorn leds luften genombrannkammarmanteln vidare mot brannkammaren. Brannkammarmanteln ar upp-byggd som en diffusor vilket innebar att luftens hastighet minskar samtidigt somtrycket okar.

2.2 Motormoduler 9
2.2.3 Vaxellada
Vaxelladans uppgift ar att driva den kringapparatur som kravs for att forse flyg-planet och motorn med den kraft som behovs. Vid konstruktion av vaxelladan harman stravat efter att minimera hojden genom att bygga den nagot bojd.
2.2.4 Brannkammare
I brannkammaren blandas luften med bransle via 18 stycken branslespridare somsitter jamnt fordelade runt brannkammaren. Komponenten innehaller aven turbin-ledskenor som riktar luftflodet i ratt anblasningsvinkel mot hogtrycksturbinen.
2.2.5 HT-turbin
Hogtrycksturbinens uppgift ar att driva kompressor samt vaxelladsaxel. Kraftenfran turbinen overfors fram till kompressorn via en turbinaxel. Den hoga temper-atur som luften har i denna del av motorn staller hoga krav pa material och de-sign av turbinskovlar. Detta har losts genom luftfilmskylning samt att ett specielltenkristallmaterial har anvants vid tillverkningen.
2.2.6 LT-turbin
Lagtrycksturbinens uppgift ar att driva flakten. Kraften overfors via en axel inutihogtrycksturbinaxeln fram till flakten.
2.2.7 Efterbrannkammare
Efterbrannkammarens huvudkomponenter ar
• EBK-mantel
• Flamhallare
• Flamror och gasblandare
• Utloppsmunstycke
• Branslesystemkomponener
EBK-manteln utgor den barande strukturen for EBK-modulen och ar fastskru-vad med kompressormodulen via det bakre stativet. Innanfor EBK-manteln sit-ter flamroret som fungerar som en varmeskold for EBK-manteln samtidigt somden leder luft till utloppsmunstycket for att kyla detta. I framkant pa flamroretfinns det en gasblandare som blandar upp forbranningsgaser med den luft somhar passerat forbi karnmotorn i bypasskanalen. Flammhallaren sitter monterad iframkant pa flamroret med uppgift att satta den forbistrommande gasen i rota-tion vilket skapar aterstromningszoner med lag axiell stromningshastighet, dettafor att antandning och forbranning av bransle skall vara mojligt. Langst bak pa

10 RM12
motorn sitter utloppsmunstycket. Utloppsmunstycket har till uppgift att regleraturbintemperaturen samt se till att motorns verkningsgrad ar maximerad.
2.3 Motorsstyrsystemet
Motorstyrsystemets uppgift ar att forse piloten med den dragkraft som onskas. Foratt bestamma dragkraften har piloten ett gasreglage dar vinkeln pa gasreglagetbestammer motorns dragkraft. Gasreglagets vinkel benamns PLA (Power LevelAngle) och kan varieras fran 0◦ till 131◦ (max tand EBK). Tabell 2.3 visar fyrafasta arbetspunkter som finns definierade for gasreglaget samt dess vinkel. Det finnsaven en svensk beteckning for vinkeln pa gasreglaget, MAV (ManoverArmsVinkel).[Mat04]
Arbetspunkt Beskrivning VinkelMTG MarkTomGang 18 ◦
FTG FlygTomGang 28 ◦
MS Max tand grundmotor med slackt EBK 103 ◦
MT Max tand grundmotor med tand EBK 131 ◦
Tabell 2.3. Arbetspunkter for RM12
2.3.1 Motorns styrsignaler
For motor RM12 med FADEC enhet finns reglertekniskt tre olika funktionssatt.Tva padragsberoende reglermoder samt en hydromekanisk reservmod. Under nor-mala forhallnaden styrs motorn av nagon av de tva padragsberoende moderna.Dessa definieras av: [Mat04]
• Gaspadrag utan EBK, dar de reglerade parametrarna ar
FVG - Variabla flaktledskenor
CVG - Variabla kompressorledskenor
NH - Kompressorvarvtal
WFM - Branslemangd till huvudmotor
A8 - Utloppsmunstyckets area
• Gaspadrag med EBK, dar de reglerade parametrarna ar
TT5 - Turbintemperatur
NL - Flaktvarvtal
WFR - Branslemangd till efterbrannkammare
A8 - Utloppsmunstyckets area

2.4 Sammanfattning 11
Da det har arbetet galler reglering av motor under EBK padrag ar det den andrareglermoden som kommer att paverkas. Under detta driftforhallnade regleras TT5,NL, WFR samt A8. I Tabell 2.4 och Tabell 2.5 ses att WFR och A8 ar styrsignaleroch TT5 samt NL ar matsignaler. Detta innebar att WFR och A8 kan paverkasdirekt genom aktuatorer. NL och TT5 kan endast paverkas genom att justera derasreferensvarden. Dessa tillstand styrs sedan mot referensvardet genom paverkan aven eller flera av styrsignalerna i Tabell 2.4.
Styrsignal Beskrivning EnhetFVG Stallbara flaktledskenor ◦
CVG Stallbara kompressorledskenor ◦
WFM Bransleflode till brannkammare kg/sWFR Bransleflode till efterbrannkammare kg/s
A8 Variabel utloppsarea m2
Tabell 2.4. Styrsignaler tillgangliga for RM12
2.4 Sammanfattning
Det har kapitlet har gett en kort beskrivning av de moduler som tillsammansbildar motor RM12, samt en introduktion till hur motorprocessen fungerar for enturboflaktmotor. Slutligen har nagot om motorns styrsystem namnts samt vilkastyr och matsignaler som anvands. Nasta kapitel beskriver de forandringar sombehover goras i styrsystemet for att erhalla ett okat bypass-forhallande.
Matsignal Beskrivning EnhetTT1 Temperatur i flaktinlopp KNL Varvtal lagtrycksrotor rps
TT25 Temperatur vid kompressorinlopp KNH Varvtal hogtrycksrotor rpsPS3 Statiskt tryck efter kompressor kPaTT5 Temperatur efter lagtrycksturbin KPT56 Totaltryck efter lagtrycksturbin kPa
Tabell 2.5. Matsignaler tillgangliga for RM12

12 RM12
Figur 2.3. Sensor och aktuatorpossitioner, motor RM12

Kapitel 3
Forandrad motorstyrning
Detta kapitel beskriver de forandringar som har gjorts i mjukvaran till FADEC.Malet med dessa ar att uppna ett hogre bypass-forhallnade vid vissa av motornsarbetsomraden. Utgangspunkten har varit de befintliga reglerfunktioner som arimplementerade i FADEC edition 3.20 [GE 00].
3.1 Inledning
De piloter som noterat det hogre motorljudet beskriver att ljudet verkar kopplattill hojd, hastighet och gaspadrag. Tydligast hors ljudet fran minimal hastighet pa2 kilometers hojd till strax under overljudsfart vid 8 kilometers flyghojd. Ljudethors endast da EBK ar tand och vid ca 120◦ PLA (Power Level Angle). Mo-torinloppstemperaturen, som beror av hastighet och hojd, ar under detta omradeav flygenvelopen1 ca 280◦ K. Motorns inloppstryck PT0, som beror av hojd ochhastighet varierar inom omradet fran ca 101 kPa till ner mot 70 kPa vid 8 km hojd.En paverkan pa reglersystemet som hojer BPR (bypass-forhallnade/ByPass Ratio)bor darfor goras i det ovan beskrivna omradet.
3.2 Positiva effekter fran ett okat bypass-forhallande
Ett okat bypass-forhallande tillsammans med vissa foljdeffekter som okat swirl(okade stromningsvirvlar) och machtal pa forbranningsgaserna forvantas fa en pos-itiv effekt pa forbranningsstabiliteten i EBK. Denna okade forbranningsstabilitetar onskvard da den tros kunna reducera de vibrationer som formodas ge upphovtill det hogre motorljudet.
1De kombinationer av hojd och hastighet som ar mojliga att flyga i.
13

14 Forandrad motorstyrning
3.3 Hur okas bypass-forhallandet
En okning av bypass-forhallandet under EBK-padrag kan goras genom att sankadet referensvarde (T5 REF) som begransar turbinutloppstemperaturen (T5). Ref-erensvardet till T5 beraknas utifran motorinloppstemperatur och omgivningstryck.Utloppsmunstyckets area (A8) anvands som reglerparameter for att begransa T5fran att stiga over sitt referensvarde. Da T5 overskrider sitt referensvarde paverkasen trimfunktion som okar A8 vilket sanker trycket i EBK med en temperatursankningsom foljd. Denna trycksankning medfor aven att en storre mangd luft passer-ar genom bypass-kanalen till EBK. Samtidigt som trycket i EBK sjunker okartryckdifferensen over lagtrycksturbinen vilket far till foljd att flaktvarvtalet okar.Flaktvarvtalet ar under EBK-padrag styrt mot konstant varvtal och for att kom-pensera mot okande varvtal sanks bransleflodet till huvudmotorns brannkammare.Denna sankning av bransleflode medfor att kompressorvarvtalet sjunker.
Det bibehallna flaktvarvtalet innebar att samma mangd luft passerar genomflakten. Kompressorn har daremot ett lagre varvtal, och kan inte ta emot likamycket luft som tidigare. Detta innebar att mangden luft som passerar vid sidanom kompressorn i bypass-kanalen okar. Som foljd av en sankning av referensvardettill turbinutloppstemperaturen fas alltsa:
• Lagre tryck i efterbrannkammare, vilket medfor att motstandet i bypass-kanalen minskar. Detta leder i sin tur till ett okat luftflode genom bypass-kanalen.
• Ett lagre kompressorvarvtal som tillsammans med ett bibehallet flaktvarvtalmedfor att en storre mangd luft passerar genom bypass-kanalen.
3.4 FADEC funktionalitet
Berakning av referensvarden till motorns styrda parametrar gors i FADEC. Foratt ha en funktionalitet som ar overskadlig ar mjukvaran i FADEC sammanlankadav mindre berakningsmoduler dar varje berakningsmodul beraknar en eller ettpar parametrar varje gang den exekveras. Da FADEC exekverar loopas en lankadlista igenom dar elementen i listan innehaller anrop till de berakningsmoduler somskall exekveras. Listan loopas igenom 10 ganger per sekund och innehaller 20 el-ement vilket innebar att den maximala uppdateringsfrekvensen for varje enskildberakningsmodul ar 200 Hz. De forandringar som gors i det har arbetet innebaratt vartannat element i listan maste utokas med ytterligare ett modulanrop. Det-ta innebar att den nya modulen (se avsnitt 3.5) kommer att uppdateras med enfrekvens om 100 Hz.
3.5 Modul CELCMULT
Matdata insamlade fran flygningar visar att det omrade man vill oka bypassforhallandeti genom temperatursankning bestams av omgivningstryck (PT0), motorinlopp-

3.6 Sankning av T5 15
stemperatur (T1) samt motorutloppsarea. Motorutloppsarean fas genom parame-tern ZA8 K WFR som ar ett matt pa hur stor denna ar. En ny berakningsmodulCELCMULT skapas som beraknar utsignalerna A8T5 SCLR, PT0 MULT samtT1 MULT dar A8T5 SCLR ar produkten av T1 MULT, PT0 MULT och A8T5 MULTfran tabell 3.1. A8T5 SCLR varierar mellan noll och ett och anvands som ettmatt pa hur stor okning av bypass-forhallnade som onskas. Figur 3.1 visar hurA8T5 SCLR varierar beroende pa T1, PT0 samt ZA8 K WFR. Det morka omradeti mitten ar det omradet dar A8T5 SCLR ar ett och maximal okning av bypass-forhallnadet onskas. Utmed kanterna miskar A8T5 SCLR till noll vilket innebaratt ingen okning av bypass-forhallandet onskas.
Motorinloppstemperatur (T1) [K] T1 MULT≤ 255 0270 1288 1≥ 308 0
Omgivningstryck (PT0) [kPa] PT0 MULT≤ 40 060 0.45≥ 70 1
ZA8 K WFR [%] A8T5 MULT8 022 0.528 136 144 0.2550 0
Tabell 3.1. Tabellen visar de parametrar vars produkt bildar A8T5 SCLR
3.6 Sankning av T5
Turbintemperaturens referensvarde (T5 REF) beraknas av FADEC i en modulkallad CELCT5DM. En sankning av turbintemperaturen (T5) gors genom att sankareferensvardet T5 REF. FADEC styr darefter turbintemperaturen mot ratt nivagenom att justera motorns utloppsarea samt branslemangd till huvudmotorn. Foratt erhalla den okning av bypassforhallande som onskas kravs enligt berakningar2
en sankning av T5 med 50◦K. Denna sankning adderas till T5 REF genom utsig-nalen A8T5 SCLR fran CELCMULT. A8T5 SCLR varierar mellan 0 och 1 ochskalas om till intervallet 0 till -90 Rankine, dar Rankine ar den amerikanska tem-peraturenhet som anvands i FADEC. (90 Rankine motsvarar 50◦K.)
2Berakningar gjorda av Volvo Aero

16 Forandrad motorstyrning
Figur 3.1. Bilden visar den styrkefunktion som avgor hur stor del av maximal justeringav T5 och ZA8 K WFR som gors. Det morka faltet i mitten motsvarar 1 (full justering)och minskar sedan till 0 langs kanterna.
3.7 Justering av A8
Utloppsarean A8 styrs genom ett aterkopplat reglersystem. Aktuell utloppsarea(ZA8 SEL) mats genom lagesgivare pa de hydraulcylindrar som staller ut begardarea. Vid behov justeras denna lagessignal via en trimfunktion i FADEC for att re-glera turbintemperaturen. En sankning av turbintemperaturen pa 50◦K motsvararen okning med ca 10% av slaglangden hos de kolvar som paverkar arean. Attlata denna okning ske med hjalp av trimfunktionen skulle vara for langsamt. Enframkoppling som utifran storleken pa turbintemperatursankningen paverkar lagessignaleninfors darfor for att erhalla en snabbare respons vid snabba temperatforandringar.
3.8 Dragkraftskompensering
Motorns dragkraft regleras av piloten via gasreglagets manoverarmsvinkel (PLA).Vid gaspadrag ar det onskvart att dragkraftsokningen ar nagorlunda linjar. Ensankning av turbintemperaturen medfor att dragkraften sanks lokalt. For att motver-ka detta behover en kompensering goras som motvarar den dragkraftsforlust somturbintemperatursankningen medfor. Denna kompensering gors genom att, beroendepa hur stor temperatursankningen ar, oka referensvardet till utloppsarean A8.

3.9 Justering av EBK-bransleflode 17
Dragkraftstillskottet kommer sig av att bransleflodet till EBK ar kopplat till ut-loppsarean dar en storre area medfor ett okat bransleflode vilket resulterar i okaddragkraft.
3.9 Justering av EBK-bransleflode
Under arbetets gang skulle en alternativ losning visa sig intressant att studera.Detta forslag skall ses som helt frikopplat fran grundforslaget som presenteradestidigare i detta avsnitt.
3.9.1 Bakgrund
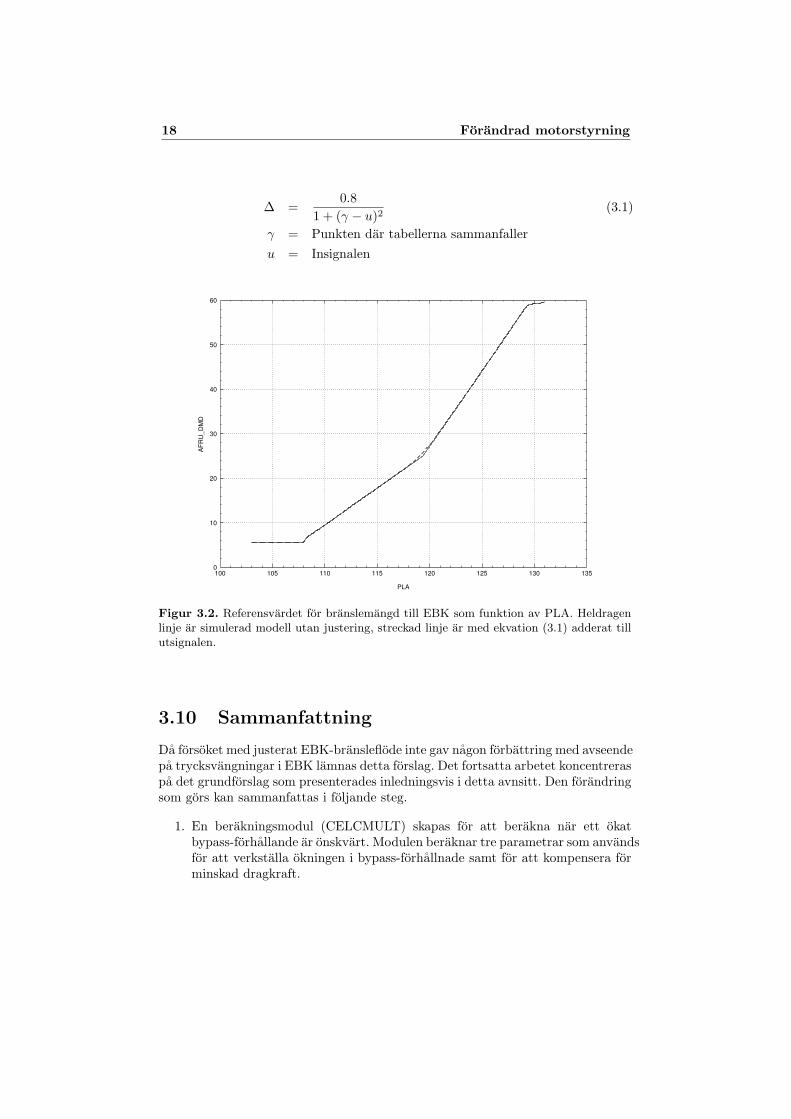
FADEC:s reglerfunktioner ar till stor del oversatta fran dess foregangare DEC, somi sin tur ar byggd for att efterlikna det hydromekaniska styrsystemet som anvandesinnan det var mojligt att introducera datorer for berakning ombord pa flygplan. Foratt berakna borvarden till styrparametrar har darfor berakningsmetoder som harvarit mojliga att implementera utan avancerad datorkraft anvants, sasom tabell-slagning, addition och subtraktion. En styrparameter som far sitt borvarde frantabellslagning ar referensvardet for branslemangden till efterbrannkammaren. Vidett padrag fran MS till MT beraknas branslemangden utifran maxvardet av tvatabeller, och vid ca 120 grader PLA korsar de bada tabellerna varandra vilketresulterar i en olinjaritet hos utsignalen, se Figur 3.2.
Det ar mojligt att denna olinjaritet, som intraffar i det omrade dar trycksvangningarnahar sin storsta amplitud skulle kunna forklara en del av den instabila forbranningsom sker i EBK.
3.9.2 Justering av bransleflodestabell
For att jamna ut den brytpunkt som bildas da de bada tabellerna sammanfalleradderas Ekvation (3.1) till utsignalen. Figur 3.2 visar hur utsignalen far en jamnareovergang mellan de bada tabellerna.
3.9.3 Resultat av forsok med justerat EBK-bransleflode
Da motormodellen simuleras med den justering som har namnts ovan kan man seen forandring pa dragkraftskurvan. Omradet mellan de bada tabellerna strax innan120 grader PLA jamnas ut och overgangen blir mindre markbar, vilket ses i Figur3.3a. Trycksvangningsamplituden PS16D forandras i stort sett ingenting, mojligtvisokar den nagot med det justerade bransleflodet. Forandringen resulterar dock inte ien sankning av PS16D och det ar troligt att anta att brytpunkten mellan kurvornai Figur 3.2 inte ar orsaken till trycksvangningarna.
18 Forandrad motorstyrning
∆ =0.8
1 + (γ − u)2(3.1)
γ = Punkten dar tabellerna sammanfalleru = Insignalen
PLA
130125120115110105100 135
AF
RU
_D
MD
50
40
30
20
10
0
60
Figur 3.2. Referensvardet for branslemangd till EBK som funktion av PLA. Heldragenlinje ar simulerad modell utan justering, streckad linje ar med ekvation (3.1) adderat tillutsignalen.
3.10 Sammanfattning
Da forsoket med justerat EBK-bransleflode inte gav nagon forbattring med avseendepa trycksvangningar i EBK lamnas detta forslag. Det fortsatta arbetet koncentreraspa det grundforslag som presenterades inledningsvis i detta avnsitt. Den forandringsom gors kan sammanfattas i foljande steg.
1. En berakningsmodul (CELCMULT) skapas for att berakna nar ett okatbypass-forhallande ar onskvart. Modulen beraknar tre parametrar som anvandsfor att verkstalla okningen i bypass-forhallnade samt for att kompensera forminskad dragkraft.

3.10 Sammanfattning 19
PLA [deg]
130125120115110105100 135
FN
[kN ]
80
75
70
65
60
55
85
PLA [deg]
130125120115110105100 135
PS
16D
[rm
s k
Pa]
5
4
3
2
1
6
(a) (b)
Figur 3.3. Simulering med och utan justerat bransleflode. (a) Streckat: Dragkraft medjusterat bransleflode. Heldraget: Dragkraft utan justerat bransleflode. (b) Streckat:PS16D med justerat bransleflode. Heldraget: PS16D utan justerat bransleflode.
2. Modulen som beraknar T5 REF andras sa att detta varde sanks da den nyamodulen CELCMULT beraknat att en sankning ar onskad.
3. Modulen som beraknar aterkopplat areavarde andras sa att det blir mojligtatt paverka det aterkopplade areavardet.
4. Modulen som beraknar utloppsarean modifieras sa att en okning av begardarea kan erhallas da en sankning av T5 gors. Detta for att kompensera forden dragkraftsforlust som uppstar da T5 sanks.
I nasta kapitel beskrivs de forandringar som gors i de specifika modulerna foratt uppna de effekter som beskrevs tidigare i detta kapitel.

20 Forandrad motorstyrning
Kapitel 4
Modellering
For att kunna se effekten av de tankta losningarna implementeras dessa i denmodell av RM12 som Volvo Aero sedan tidigare har utvecklat. Modellen, som kallasRM12 SYSTEM ar utvecklad i MatrixX/SystemBuild, se Appendix A, Figur A.1.Modellen bestar av fem delmodeller:
• AMBIENT beraknar omgivningsdata sasom tryck, temperatur, hastighetoch altitud.
• FPL39 1553B simulerar den busstrafik som sker mellan FADEC och dessomgivning.
• FPL39 COCKPIT representerar granssnittet mellan cockpit och motor.Har finns mojlighet att paverka manga av de manoverdon som piloten hartill sitt forfogande vid flygning.
• RM12 ar uppbyggd av flera delmodeller som tillammans representerar motorRM12. Ingaende modeller ar ACTUATORS - stalldonsmodell, F404 RM12- processmodell over motor, RM12 Sensors - modell over de sensorer somfinns i motorn, SignalInterface - modell over signalgranssnitt, MFC - mod-ell over den mekaniska reglering av motorn som anvands da FADEC kopplasbort, ABC - EBK-regulatormodell, FADEC - FADEC-modell
• RigDataLog ar en signalgranssnittsmodell som loggar data under simuleringsom kan anvandas for plottning.
4.1 Modifierade moduler
Den modell som anvands i MatrixX for att simulera FADEC ar skapad fran ettstort antal .c och .h filer. Dessa skapas utifran ett kodgenereringsverktyg som het-er Beacon. I Beacon byggs reglerfunktioner upp genom byggblock pa samma sattsom i exempelvis Matlab/Simulink och MatrixX/SystemBuild. For att fa funk-tionaliteten overskadlig begransas storleken pa dessa reglerfunktioner till att passa
21

22 Modellering
in pa en A4-sida. Fortsattningsvis kommer dessa kallas Beacondiagram eller mod-uler. For att kunna genomfora den forandring som beskrevs i Kapitel 3 behovervissa justeringar goras i tre av dessa Beacondiagram. En ny modul (CELCMULT)behover skapas for att berakna A8T5 SCLR, PT0 MULT samt BPR MULT. Dessajusteringar beskrivs nedan och modulerna ses i appendix B dar CELCMULT ses isin orginalform och de tre modifierade modulerna visas principiellt.
• CELCT5DM beraknar T5 REF och har utokats med en extra insignal(A8T5 SCLR) som multipliceras med en konstant (T5 SCLR JM). Resul-tatet fran multiplikationen adderas till utsignalen T5 REF som justeras medmellan 0 till -90 Rankine beroende pa A8T5 SCLR.
• CA8CMULT har utokats med en extra insignal (A8T5 SCLR) som mul-tipliceras med en konstant (A8 SCLR JM). Resultatet fran multiplikationenlagpassfiltreras genom ett filter (se avsnitt 5.5.2) och subtraheras slutligenfran ZA8 SEL (aktuell utloppsarea). En konstant (A8 SCLR FILT JM) kansattas till 0 vilket innebar att filtret kopplas bort. Om densamma satts till 1ar filtret aktiverat.
• CA8CDMDS beraknar borvardet (ZA8 DMD SEL) till A8 utifran gaspadraget(PLA SEL). Modulen har utokats med en tabell (A8 ADJ TAB) som okarZA8 DMD SEL vid vissa gaspadrag. For att inte borvardet skall andras datryck och temperaturforhallnadena ar sadana att risk for forhojt motorljudinte foreligger multipliceras utsignalen fran A8 ADJ TAB med PT0 MULToch T1 MULT fran Tabell 3.1.
• CELCMULT beraknar skalfaktorn A8T5 SCLR som anvands for justeringav T5 REF och ZA8 K WFR. Aven T1 MULT och PT0 MULT som anvandsvid dragkraftskompenseringen beraknas har. Insignal WFR HOLD ar 0 en-dast da EBK ar tand och anvands har for att tillse att justering av T5 ochA8 endast gors da EBK ar tand.
4.2 Trycksvangningssimulator
For att kunna se effekterna av de reglerandringar som gors behover trycksvangningsnivan(PS16D) simuleras. En simulator som utifran EBK bransleflode (WFRT), EBKverkningsgrad (EAB), totalt luftflode (W1), bypass-forhallande (BPR), omgivn-ingstryck (PT0) samt EBK-tryck (PT56) simulerar denna trycksvangningsniva harkonstruerats av Volvo Aero, se figur 4.1.
4.3 Sammanfattning
Detta kapitel har beskrivit den modell som anvands vid simulering av RM12 samtde forandringar som har gjorts i de berakningsmoduler som ligger till grund forprogramvaran i FADEC. Nasta kapitel studerar vilka effekter de forandringar som

4.3 Sammanfattning 23
gjorts ger med avseende pa stabilitet av det aterkopplade system som reglering avutloppsarean utgor.
WFRT (g/s)
W1 (kg/s)
Product
PT56 (kPa)
PT0sim mult
PT0 (kPa)
PS16D%
PS16D (kPa)
EAB
BPR mult
BPR
f(WFRT,EAB,W1)
0.01
Figur 4.1. Modell som simulerar PS16D utifran motordata

24 Modellering

Kapitel 5
Analys av stabilitet
Reglering av RM12:s utloppsarea sker via ett aterkopplat system. En stabilitets-analys av denna aterkoppling har gjorts vid utvecklingen av FADEC vilken visaratt reglerloopen ar stabil. Den justering som nu gors av areans aterkopplade vardeZA8 K WFR kan paverka stabiliteten hos systemet. For att sakerstalla att justerin-gen inte resulterar i instabilitet behover en analys goras av det justerade systemet.
5.1 Funktion
Tidigare namndes att utloppsarean paverkas genom hydraulcylindrar. Dessa hy-draulcylindrar forsorjs av en hydraulpump dar flodet kan justeras under drift(stallbart deplacement). Deplacementet styrs hydrauliskt via en ventil som i sintur ar styrd av en elektrisk momentmotor. Elmotorns drivstrom bestams somdifferensen mellan onskat areareferensvarde (ZA8 DMD SEL) och ZA8 K WFRmed viss justering for maxbegransning och filtrering. Det som sker vid sankningav ZA8 K WFR ar att differensen okar och saledes aven stromstyrkan till elmo-torn som bestammer hydraulflodet, dar ett okat hydraulflode innebar en storreutloppsarea. En paverkan av A8 gors saledes genom att paverka differensen mellanZA8 DMD SEL och ZA8 K WFR, vilket gors genom att justera ZA8 K WFR.
5.2 Modell av aterkoppling
Figur 5.1 visar den nuvarande modellen av regulator, servo och aktuatorer samt sig-nalbehandlingen i FADEC. Ekvationerna (5.1) till (5.4) beskriver de overforingfunktionersom tillhor resp system.
CRt(s) =13.2(1 + 0.025s)
1 + 0.0075se−0.002s (5.1)
TMDt(s) =1
1 + 0.004se−0.005s (5.2)
25

26 Analys av stabilitet
VDTt
VDT DEMOD &FILTERING
TMDt
TORQUE MOTORDRIVER
SA
SERVOVALVE &ACTUATOR
In
CRt
CONTROL REGULATOR
1+0.3
1+K_factor
(mA) (mA)
ZA8_K_WFR (%)
(%)ZA8_DMD_SEL (%) (%)
ZA8_SEL
Figur 5.1. Modell av reglerloop for A8-reglering
SA(s) =1.2
(1 + 0.03s)s(5.3)
V DTt(s) =1
1 + 0.0072s+ 0.000026s2e−0.003s (5.4)
5.3 Modifierad modell
Den aterkoppling som gors fran ZA8 K WFR till ZA8 SEL innehaller en tidsfordrojningsamt en olinjaritet i form av en tabellslagning. Vardet fran denna tabell aterkopplastillbaka till ZA8 SEL. Systemet mellan ZA8 SEL och ZA8 K WFR kan ses som ettslutet system med overforingsfunktion enligt ekvation (5.5). Variabeln K factorhar i tidigare analyser valts till 0.3, vilket den far anta aven har. Forstarkningen Kar tankt att representera den forstarkning som tabellen i Figur 5.3a utgor. Tabellensom ar amplitudberoende kan a andra sidan egentligen inte ses som en statiskforstarkning. Det kan emellertid vara intressant att undersoka om det finns ettgransvarde for K som gor systemet instabilt.
Definition 5.1 (Stabilitetsomrade) For ett tidsdiskret system ar stabilitetsomradetlika med det inre av enhetscirkeln. For att samma system skall vara stabilt mastedess poler ligga i detta omrade. [LG03].
Gc(z) =1 +K factor
1 + (1 +K factor) ·K · z−1(5.5)
Om ekvation (5.5) omformuleras till
Gc(z) =(1.3)z
z + 1.3K(5.6)
inses att kravet pa stabilitet enligt Definition 5.1 ar uppfyllt da polerna till ek-vation (5.6) ar inom enhetscirkeln, vilket ar sant for alla |K| < 1
1.3 (≈ 0.769). I

5.3 Modifierad modell 27
Figur 5.3b visas forstarkningen K som funktion av ZA8 K WFR, dar K fas enligtK = F (ZA8 K WFR)/ZA8 K WFR och F (ZA8 K WFR) motsvaras av Figur5.3a. Det storsta vardet K antar ar 0.36, vilket inte overstiger 0.769. Detta in-nebar att aterkopplingen som gors inte resulterar i instabilitet pa grund av for storforstarkning. Att K ≈ 0.77 ar ett gransvarde for stabilitet for det slutna systemetGc(z) inses genom att titta pa namnaren i (5.6). Att detta aven ar ett gransvardefor hela systemet ses i Figur 5.4 dar K varieras. Da K overstiger 0.77 blir systemetinstabilt och utsignalen viker av nedat efter en stunds simulering.
ZA8_DMD_SEL
VDTt
VDT DEMOD &FILTERING
z
1
Unit Delay
TMDt
TORQUE MOTORDRIVER
SA
SERVOVALVE &ACTUATOR
K
K
CRt
CONTROL REGULATOR
1+0.3
1+K_factor
(mA) (%)
ZA8_SEL ZA8_K_WFR (%)
(mA)
Figur 5.2. A8-reglerloop modifierad genom aterkoppling med konstant K
a b
5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7
8
9
10
11
ZA8 K WFR
[-]
5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
ZA8_K_WFR
K
(a) (b)
Figur 5.3. (a) Aterkopplat varde fran ZA8 K WFR till ZA8 SEL. (b) Forstarkningen Ksom funktion av ZA8 K WFR.

28 Analys av stabilitet
0 2 4 6 8 10 12 14 16 18 20−80
−60
−40
−20
0
20
40
60
80
Tid [s]
ZA
8 K
WF
R
Figur 5.4. Stegsvar for olika varde pa K. Da K overstiger 0.77 ses hur systemet blir insta-bilt och ZA8 K WFR viker av nedat efter en stunds simulering.Streckprickad: K=0.76,Streckad: K=0.78
5.4 Olinjar aterkoppling
Den svarighet som ligger i att undersoka stabiliteten hos systemet med aterkopplingberor pa att forstarkningen K inte ar konstant. Forstarkningen varierar beroendepa styrkan pa ZA8 K WFR vilket sags i Figur 5.3b.
For att fa en modell som battre overensstammer med det verkliga systemetgors nagra modifieringar. Forstarkning pa aterkopplingen modeleras enligt Figur5.5 dar K har ersatts med tabellen i Figur 5.3 a. Blocken CRt(s) samt VDTt(s)ersatts med CRtd(z) (5.7) och VDTtd(z) (5.8) dar CRtd(z) och VDTtd(z) ar dendiskretiserade overforingsfunktionen for CRt(s) respektive VDTt(s).
Anledningen till att dessa overforingsfunktioner diskretiseras ar att i FADECberaknas CRt(s) som beskriver regulatorn, och VDTt(s) som beskriver signalensoverforing fran lagesgivaren till FADEC:s applikationsmjukvara diskret med enuppdateringshastighet om 100 Hz.
Vid ett normalt motorpadrag fran maximalt gaspadrag med slackt EBK (MS)till maximalt tand EBK (MT) okar borvardet (ZA8 DMD SEL) fran ungefar 8 till

5.5 Atgarder mot instabilitet 29
50 linjart med gaspadraget. En simulering med detta som insignal visar tydligastabilitetsproblem vid tva omraden, Figur 5.6a. De varden pa ZA8 K WFR darsvangningarna borjar ar 22 och 36, vilket ses i Figur 5.6b. Dessa punkter aterfinnssom brytpunkter i aterkopplingstabellen, Figur 5.3a.
CRtd =23.8z − 14.08z2 − 0.2636z
(5.7)
V DTtd =0.4738z2 + 0.4842z + 0.01417z3 − 0.09061z2 + 0.06271z
(5.8)
ZA8_DMD_SEL
VDTtd
VDT DEMOD &FILTERING
z
1
Unit Delay
TMDt
TORQUE MOTORDRIVER
SA
SERVOVALVE &ACTUATOR
Look−UpTable1
CRtd
CONTROL REGULATOR
1+0.3
1+K_factor
(mA) (%)
ZA8_SEL ZA8_K_WFR (%)
(mA)
Figur 5.5. A8-reglerloop modifierad genom inforande av Look-Up Table1 med tabel-lvarden enligt Figur 5.3a
5.5 Atgarder mot instabilitet
For att motverka den instabilitet som sags i Avsnitt 5.4 kan tva losningar varaintressanta att studera vidare. Dessa ar
1. Justering av tabellens utformning.
2. Infora filterverkan pa tabellens utsignal.
Dessa angreppssatt beskrivs utforligare i styckena nedan.
5.5.1 Justering av tabell
Vid simulering av ett EBK-padrag dar areareferensvardet okar fran 8% till 50%sags i Figur 5.6b att ZA8 K WFR svanger kraftigt med borjan vid 22% och 36%.

30 Analys av stabilitet
a b
0 5 10 15 20 2510
0
10
20
30
40
50
Tid [s]
Ko
lvu
tsty
rnin
g [
%
]
0 5 10 15 20 250
10
20
30
40
50
60
Tid [s]
ZA
8_
K_
WF
R
(a) (b)
Figur 5.6. Figur (b) visar tydliga problem med instabilitet vid tva omraden. Dessaomraden aterfinns som brytpunkter i Figur 5.3a.(a) Streckat: Begart arearefer-ensvarde. Heldraget: Aktuatorposition. (b) Den justerade aterkopplade aktuatorposi-tionen ZA8 K WFR.
Dessa varden stammer val overens med brytpunkter i Figur 5.3a och det ar rimligtatt anta att svangigheten beror pa att dessa punkter passeras. Om tabellen modi-fieras enligt Figur 5.7 forsvinner den brytpunkt kring 22% som formodas ligga tillgrund for svangningarna pa ZA8 K WFR. Resultatet vid en simulering med sam-ma insignal som i Figur 5.6a visar att instabilitetsproblemet vid denna brytpunkthar forsvunnit (Figur 5.8).
Ett liknande forsok att eliminera brytpunkten pa tabellens hogra sida skall visasig vara svarare. Att rata ut linjen pa motsvarande satt som gjordes pa den vanstrasidan ger ingen forbattring. For att na en acceptabel niva pa svangningarna behovertabellen justeras enligt Figur 5.9. Denna justering ger vid samma simulering somtidigare resultatet i Figur 5.10.
Den justering som har gjorts av tabellen uppfyller inte kravet att justerin-gen skulle galla endast vid del-EBK. Som tabellen ser ut nu fas en kvarvarandepaverkan av A8 vid MT. Denna kvarvarande areaokning skulle medfora en forlustav dragkraft vid max gaspadrag vilket inte ar onskvart.
Slutsatsen av detta blir att en justering av tabellens utformning inte ar rattmetod for att atgarda det stabilitetsproblem som skapas av aterkopplingen.
5.5.2 Inforande av filter
En alternativ losning till att justera tabellen vilket gjordes i Avsnitt 5.5.1, ar attlagpassfiltrera det fran tabellen aterkopplade vardet. Figur 5.11 visar en frekven-sanalys av simuleringen i 5.6b. Frekvensanalysen visar att signalen innehaller tvadominerande frekvenser vid ca 3 respektive 50 Hz. En narmare analys av spek-traltatheten visar att den lagre frekvensen har sitt storsta energiinnehall vid 2.9

5.5 Atgarder mot instabilitet 31
5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7
8
9
10
ZA8_K_WFR
[ -]
5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
ZA8 K WFR
K
(a) (b)
Figur 5.7. For att eliminera den brytpunkt som lag till grund for instabiliteten kringZA8 K WFR = 22% (Figur 5.6) modifieras tabellen. (a) Streckad: Den justeradetabellen, Heldragen: Orginaltabellen (b) Streckad: Justerad forstarkning K som funk-tion av ZA8 K WFR, Heldragen: Orginal forstarkning K som funktion av ZA8 K WFR
a b
0 5 10 15 20 2510
0
10
20
30
40
50
Tid [s]
Ko
lvu
tsty
rnin
g [
%
]
0 5 10 15 20 250
10
20
30
40
50
60
Tid [s]
ZA
8_
K_
WF
R
(a) (b)
Figur 5.8. Simulering av systemet med justerad aterkopplingstabell visar att problemenmed instabilitet forsvinner. (a) Streckad: Begart areareferensvarde Heldragen: Aktua-torposition (b) Den justerade aterkopplade aktuatorpositionen ZA8 K WFR
Hz eller 18.2 rad/s. Se Figur 5.12.Simuleringar har aven gjorts med varierande insignal for att undersoka om
sjalvsvangningsfrekvensen ar insignalsberoende. Se appendix D. Dessa visar att sainte ar fallet.
For att bestamma vilket filter som lampar sig bast for att undertrycka den

32 Analys av stabilitet
a b
5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7
8
9
10
ZA8_K_WFR
[- ]
5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
ZA8 K WFR
K
(a) (b)
Figur 5.9. For att forsoka motverka problemen med instabilitet med borjan vidZA8 K WFR = 36 justeras tabellen.(a) Streckad: Den justerade tabellen, Heldragen:Orginaltabellen (b) Streckad: Justerad forstarkning K som funktion av ZA8 K WFR,Heldragen: Orginal forstarkning K som funktion av ZA8 K WFR
a b
0 5 10 15 20 250
5
10
15
20
25
30
35
40
45
50
Tid [s]
Ko
lvu
tsty
rnin
g [
%
]
0 5 10 15 20 250
10
20
30
40
50
60
Tid [s]
ZA
8_
K_
WF
R
(a) (b)
Figur 5.10. Simulering av systemet med justerad aterkopplingstabell visar klaraforbattringar i det justerade omradet. (a) Streckad: Begart areareferensvarde Heldra-gen: Aktuatorposition (b) Den justerade aterkopplade aktuatorpositionen ZA8 K WFR
storning som blir pa signalen, simuleras modellen med lagpass-filter av ordning 1,2 och 4 placerade efter tabellen Look-up Table1 i Figur 5.5. Simuleringar visar attfiltren i Tabell 5.1 ar de filter med respektive hogsta brytfrekvensen som klarar atttillfredsstallande dampa ut svangningarna.
Med dessa tre filter som alternativ aterstar att valja det filtret som bast lamparsig for implementering i den berakningsmodul det ar tankt att placeras i. Onskvarda

5.5 Atgarder mot instabilitet 33
egenskaper ar att filtret relativt snabbt reagerar pa forandringar pa insignalen,vilket framfor allt sker vid snabba motortransienter under EBK-padrag. Vidarebor filtret berakningsmassigt sett vara enkelt da det skall exekveras i realtid avFADEC, vilket innebar att tiden for exekvering ar begransad. Figur 5.13 visarstegsvar samt bodediagram for de tre filtren. Filter H3(s) reagerar langsammast,iallafall till att borja med. Dessutom har filtret en overslang som talar emot det.Detta tillsammans med att filtret har hogst ordningstal och saledes aven ar detfilter som kraver mest berakningstid gor att detta alternativ inte kan anses varadet basta. Skillnaden i responstid mellan H1(s) och H2(s) ar daremot inte sa storoch bada filtren kan anses vara ett bra val. Filter H1(s) valjs dock pa grund av sittlagre ordningstal.
Time
Fre
quen
cy
0 5 10 15 200
5
10
15
20
25
30
35
40
45
50
Figur 5.11. Frekvensalanalys av signalen ZA8 K WFR visar att den dominerandefrekvensen ar ca 3 Hz.
Detta filter approximeras med hjalp av bilinjar transformation till en tidsdiskretmotsvarighet for att passa in i den tidsdiskreta modellen som beskriver A8 regelerin-gen. Vid bilinjar transformation avbildas imaginara axeln pa enhetscirkeln, dettamedfor att frekvensskalan mellan det kontinuerliga filtret och det digitala inte blirexakt samma [LiU03]. For sma ω stammer det daremot overens val och i dettafall blir skillnaden forsumbar. Det digitala filtrets gransfrekvens blir 6.9971 rad/s,vilket kan jamforas med det kontinuerliga filtrets gransfrekvens vid 7 rad/s.
Det digitala filtrets utseende blir

34 Analys av stabilitet
1 2 3 4 5 6 7 8 9
−15
−10
−5
0
5
10
15
Frequency (Hz)
Pow
er S
pect
ral D
ensi
ty (
dB/H
z)
Welch PSD Estimate
Figur 5.12. Bestamning av frekvens pa instabil svangning med hjalp av spektraltathetger ett noggrannare varde pa frekvensen. Frekvensen bestams till 2.9 Hz.
Filter Ordning Brytfrekvens [rad/s]
H1(s) = 7s+7 1 7
H2(s) = 144s2+16.97s+144 2 12
H3(s) = 65540s4+41.81s3+874s2+10700s+65540 4 16
Tabell 5.1. Filter for stabilisering av ZA8 K WFR.
H1(z) =0.03382z + 0.03382
z − 0.9324(5.9)
Figur 5.15 visar en simulering med samma insignal som i figur 5.6b.

5.6 Slutsats av analys av stabilitet 35
a b
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ud
e
100
80
60
40
20
0
Ma
gn
itu
de
(d
B)
10 1
100
101
102
360
270
180
90
0
90
Ph
ase
(d
eg
)
Bode Diagram
Frequency (rad/sec)
(a) (b)
Figur 5.13. Filterkarakteristik for filtren i Tabell 5.1, vilka har diskretiserats genombilinjar transformation (Tustins metod). Heldraget: H1(z) , Streckat: H2(z) , Streck-prickat: H3(z). (a) Stegsvar, (b) Bodediagram
5.6 Slutsats av analys av stabilitet
Det resultat som framkom i kapitlet visar att ett filter troligtvis behovs for attforbattra stabilitet och motverka att systemet blir svangigt inom vissa arbet-somraden. I kapitel 4 beskrivs var detta filter implementeras. I nasta kapitel kom-mer simuleringar av hela motormodellen genomforas. I dessa simuleringar har filtret(5.9) implementerats i modellen.
H1(z)
ZA8_DMD_SEL
VDTtd
VDT DEMOD &FILTERING
z
1
Unit Delay
TMDt
TORQUE MOTORDRIVER
SA
SERVOVALVE &ACTUATOR
Look−UpTable1
CRtd
CONTROL REGULATOR
1+0.3
1+K_factor
0.03382z+0.03382
z−0.9324
(mA) (%)
ZA8_SEL ZA8_K_WFR (%)
(mA)
Figur 5.14. A8-reglerloop modifierad genom (1) inforande av Look-Up Table1 med tabel-lvarden enligt Figur 5.3a samt (2) inforande av filter H1(z) (5.9)

36 Analys av stabilitet
a b
0 5 10 15 20 2510
0
10
20
30
40
50
Tid [s]
Ko
lvu
tsty
rnin
gin
g
[%
]
0 5 10 15 20 250
10
20
30
40
50
60
Tid [s]
ZA
8_
K_
WF
R
(a) (b)
Figur 5.15. Simulering av systemet med filter. Efter att systemet svangt in sig franinitialtilstandet ses inga tendenser till instabilitet. 5.9 (a)Streckat: Begart arearefer-ensvarde, Heldraget: Aktuatorposition. (b) Den justerade aterkopplade aktuatorposi-tionen ZA8 K WFR

Kapitel 6
Simuleringar av motormodell
Innan ny programvara for FADEC kan testas i riktig motor i testcell kravs attverifieringar gors for att tillse att onskat resultat har uppnatts. Detta gors van-ligtvis genom datorsimuleringar av den processmodell av RM12 som Volvo Aerohar utvecklat. Orsaken till att testningen utfors genom simuleringar ar att det badear kostsamt att utfora motorprov med riktig motor samt att det vore riskfyllt formotor och provpersonal att kora en motor med programvara som inte ar noggrantutvarderad.
6.1 Motorsimuleringsmojligheter
Vid avdelningen Motorsystem pa Volvo Aero finns mojlighet att simulera olikakorfall for motor RM12. Detta kan goras antingen pa
• PC-miljo, genom simuleringsverktyget System build.
• realtidssimuleringsutrustning kopplad till en riktig FADEC enhet.
Under utvecklingsarbetet anvands oftast PC for simulering da det ar relativt enkeltatt uppdatera den programvara som kravs for att FADEC-modellen skall varaexekverbar. Realtidssimulering med riktig FADEC-hardvara kraver lite mer arbetefor att den skall kunna anvandas. Fore simulering i PC maste en modell av FADECskapas i MatrixX. Detta gors genom ett verktyg som Volvo Aero har utvecklat somheter Beacon2MATRIXx och som utgar fran de Beacondiagram som skapas.
Vid simulering i realtidsutrustning anvands riktig FADEC-hardvara och mjuk-varan skapas via ett verktyg som heter FASTC (FADEC Application Software forTest from C). Aven detta verktyg ar utvecklat av Volvo Aero och utgar fran deBeacondiagram som skapats.
37

38 Simuleringar av motormodell
6.2 Simulering i PC
Vid simulering i PC kan man som insignal valja att ange de PLA man vill attmotorn skall folja. Insignalen anges da som en vektor dar brytpunkterna som skallpasseras motsvaras av elementen i vektorn. En motsvarande vektor som anger tid-punkt da brytpunkterna skall passeras maste aven anges vid simulering. Vid simu-lering interpoleras varden linjart mellan brytpunkterna vid varje berakningssteg.Exempel 1 visar hur insignal och tidsvektor ser ut for simuleringen i figur C.5.
Exempel 1Resultatet i Figur C.5 har genererats av foljande rader:
t=[0,5,20,25,40,45,45.01,50,50.01,55,55.01,60,60.01,65,65.01,70,...
70.01,75,75.01,85,85.01,95,95.01,105,105.01,115,115.01,125]’
pla=[103,103,131,131,103,103,131,131,103,103,120,120,131,131,...
120,120,103,103,28,28,131,131,28,28,120,120,28,28]’
out=sim("RM12_SYSTEM",{time=t,input=pla})
6.3 Simulering med olika temperatur, tryck ochmachtal
Luftens tryck och temperatur varierar som funktion av hojden. En modell over hurstandardatmosfaren varierar ges av Ekvation (6.1) samt (6.2), vilka bygger pa ISOstandard 2533-1975(E) och ar giltiga mellan -2 km till 11 km hojd. Pamb ar statisktomgivningstryck i Pascal och Tamb ar statisk omgivningstemperatur i Kelvin.
Under flygning paverkas tryck och temperatur i motorinloppet av hastighetendar okad hastighet medfor okat tryck och temperatur. Ekvation (6.3) och (6.4)beskriver detta samband. Totaltemperaturen i motorinloppet benamns TT1 ochanges i Kelvin. Totaltrycket i motorinloppet benamns PT1 och anges i Pascal.
I modellblocket Ambient, se Appendix Figur A.1, finns mojlighet att valjaomgivningstryck, omgivningstemperatur samt hastighet. FADEC beraknar sedanutifran vald hastighet TT1 och PT1 som anvands for berakning av motorns styr-parametrar. For att se vilken effekt reglerandringen far pa olika hojd och machtalgors simuleringar dar tryck och temperatur varieras for att motsvara hojderna 0,2, 4, 6, 8 och 11 km. Tabell 6.1 visar de data som anvands vid simuleringarna.Vid varje driftspunkt varieras PLA gradvis fran 107◦ till 131◦ och data samplasnar motorn uppnar stationart drifttillstand for varje helt gradtal. Simuleringarnautfors dels med idag gallande programvaran for FADEC, version 3.20, samt med

6.4 Simulering med olika gaspadrag 39
Pamb [kPa] Tamb [K] Hastighet [mach]101.3 288.15 0.3, 0.6, 0.979.483 275.15 0.3, 0.6, 0.961.625 262.15 0.3, 0.6, 0.947.170 249.15 0.3, 0.6, 0.935.588 236.15 0.3, 0.6, 0.922.624 216.65 0.3, 0.6, 0.9
Tabell 6.1. Tryck, temperatur och hastighet som anvants vid simulering.
den programvaran som ar modifierad for att erhalla hogre bypass-forhallnade, ver-sion 3.20x. Resultatet av simuleringarna ses i Appendix C.1 - C.4.
Pamb = Pstd · (1 +TgradTstd
·Galt)−Gstd
Tgrad·Rstd (6.1)
Tamb = Tstd + Tgrad ·Galt (6.2)
Rstd =Pstd
Tstd ·R0stdGalt = Hojd over havsniva i meterPstd = 101325.0Tgrad = −0.0065Tstd = 288.15Gstd = 9.80665R0std = 1.225
TT1 = Tamb · (1 +κ− 1
2·M2) (6.3)
PT1 = Pamb · (1 +κ− 1
2·M2)3.5 (6.4)
M = Hastighet [mach]κ = 1.4
6.4 Simulering med olika gaspadrag
For att kunna se vilken effekt den nya programvaran ger vid olika padrag harett antal simuleringar med varierande gaspadrag gjorts. Simuleringarna har gjortsmed tryck och temperatur motsvarande SLS (SeaLevel Static) och programvaran i

40 Simuleringar av motormodell
FADEC har varit version 3.20 samt version 3.20x. Tre olika gaspadrag har testatsoch dessa beskrivs nedan.
MS-MT som langsam transient
Figur C.6 visar ett gaspadrag fran MS till MT linjart under 10 sekunder. Simulerin-gen visar hur bypass-forhallandet for modellen med den modifierade programvaran(version 3.20x) okar under padraget samtidigt som turbintemperaturen sjunker iforhallande till version 3.20. Mot slutet da PLA narmar sig MT forsvinner skill-naden mellan de bada simuleringarna vilket den skall gora.
MS-MT som ett stegpadrag
Figur C.7 visar ett padrag fran MS till MT som sker som ett steg. Under steget seshur bypass-forhallandet okar och turbintemperaturen sanks. Trots att ZA8 K WFRminskas okar inte A8 fortare for modellen med programvaran version 3.20x jamfortmed version 3.20. Detta beror pa att aktuatorerna som paverkar arean nar sittmaxvarde for hur fort de kan rora sig under snabba transienter. Det som sankertrycket i EBK vid simulering med den nya programvaran ar att bransleflodetpaverkas av ZA8 K WFR och detta medfor att under transienten far EBK mindrebransle vilket leder till lagre tryck i EBK med okat bypass-forhallande som foljd.
MS-115◦ PLA
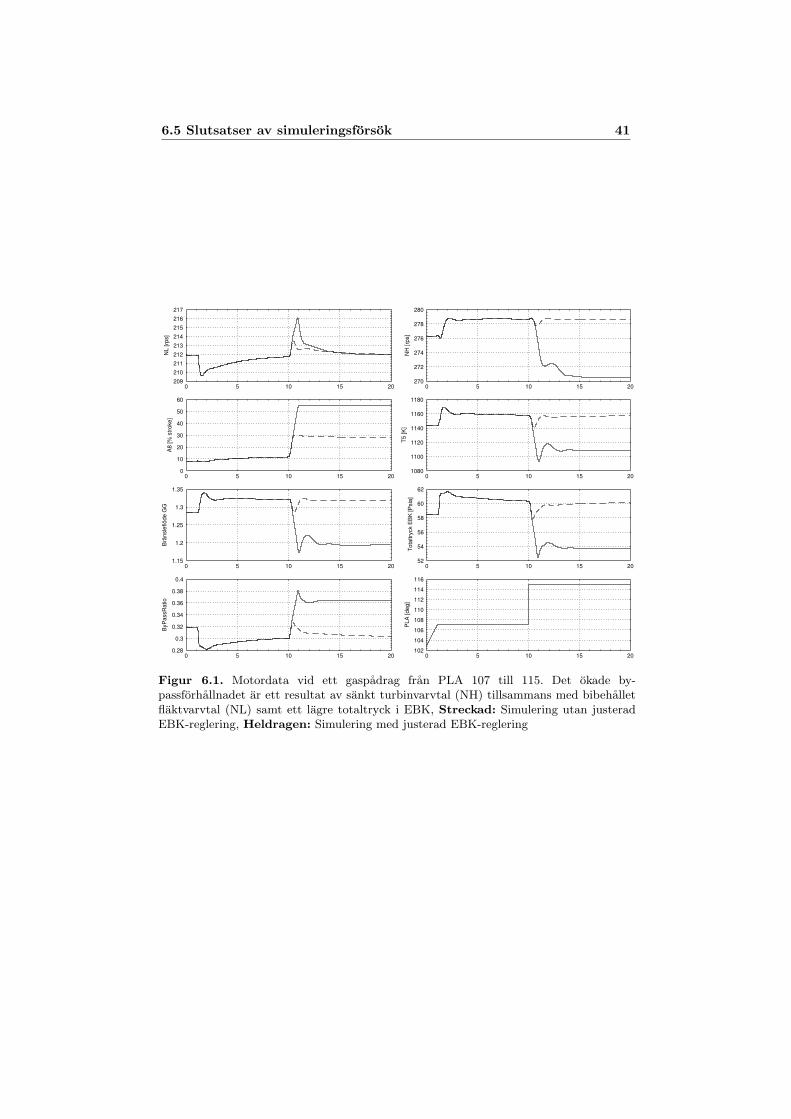
Figur C.8 visar ett padrag fran MS till 115◦ PLA som ett steg. Effekterna blir sam-ma som i simuleringen ovan med den skillnaden att okningen i bypass-forhallandetblir kvarvarande. Figur 6.1 visar samma effekt dar PLA har okats fran 107◦ till115◦.
6.5 Slutsatser av simuleringsforsok
Forsoken visar att det ar mojligt att i simuleringsmiljo uppna ett hogre bypass-forhallande genom att andra programvaran till FADEC. Ett okat bypass-forhallandeerhalls bade vid langsamma padrag fran MS till MT samt da padraget sker somett steg. Vid snabba padrag tar det lite langre tid innan maximal dragkraft uppnasmed den programvaran som sanker T5 REF. Denna okade tid bedoms dock somacceptabel av Volvo Aero.
6.5 Slutsatser av simuleringsforsok 41
151050 20
NL [rp
s]
216
215
214
213
212
211
210
209
217
151050 20
NH
[rp
s]
278
276
274
272
270
280
151050 20
A8 [%
str
oke]
50
40
30
20
10
0
60
151050 20
T5 [K
]
1160
1140
1120
1100
1080
1180
151050 20
Brä
nsle
flöde G
G 1.3
1.25
1.2
1.15
1.35
151050 20
Tota
ltry
ck E
BK
[P
sia
]
60
58
56
54
52
62
151050 20
ByP
assR
atio
0.38
0.36
0.34
0.32
0.3
0.28
0.4
151050 20
PLA
[deg]
114
112
110
108
106
104
102
116
Figur 6.1. Motordata vid ett gaspadrag fran PLA 107 till 115. Det okade by-passforhallnadet ar ett resultat av sankt turbinvarvtal (NH) tillsammans med bibehalletflaktvarvtal (NL) samt ett lagre totaltryck i EBK, Streckad: Simulering utan justeradEBK-reglering, Heldragen: Simulering med justerad EBK-reglering

42 Simuleringar av motormodell

Kapitel 7
Slutsatser
I detta kapitel gors en genomgang av de resultat som har uppnatts, vilka mal somspecificerades i Avsnitt 1.3 som har uppnatts samt forslag till fortsatt arbete.
7.1 Resultat
De simuleringar som har gjorts av den modifierade programvaran till FADEC harvisat att det ar mojligt att oka bypass-forhallandet lokalt under EBK-padrag. Un-der de motorpadrag dar bypass-forhallandet har okat har aven den modelleradetrycksvangningsnivan PS16D minskat vilket ar onskat. Simuleringar har visat attviss instabilitet forekom i det grundforslag som Volvo Aero foreslog. Pa grund avdetta har ett filter inforts som minskar de svangningar som instabiliteten gav up-phov till. Simuleringarna visar aven att trots en sankning av turbintemperaturenkan dragkraften behallas inom en rimlig niva genom att kompensera med en okadutloppsarea vilket ger ett okat bransleflode till EBK med extra dragkraft som foljd.Vidare kan namnas att vid snabba gaspadrag fas en liten fordrojning av dragkraft-stillvaxten. Denna fordrojning anses dock av Volvo Aero vara acceptabel.
7.2 Forslag till fortsatt arbete
Innan det har arbetet med justerad programvara till FADEC kan sagas vara losningenpa det okade motorljudet kravs fortsatt arbete. Det kanske viktigaste testet somaterstar ar att prova programvaran pa en riktig motor. Ljud och vibrationsmatningarpa motor med den nuvarande programvaran edition 3.20 samt den modifierade pro-gramvaran kommer att lamna besked om hurvida modifieringen har varit framgangsrik.Om motorprov visar sig ge positivt resultat kan foljande punkter vara varda attstudera vidare:
• En noggrannare jusering av tabellen for kompensering av dragkraft skullekunna ge en mer linjar dragkraftsokning fran MS till MT.
43

44 Slutsatser
• Om det fanns en metod for att detektera begynnande trycksvangningar skullemotatgarder kunna sattas in mer exakt. Det kan darfor vara intressant att seom det gar att detektera tryckvariationerna under motoranvandning.
7.3 Uppfyllda mal
Malen for examensarbetet definierades i Avsnitt 1.3. Den forsta fragan som stallsar om en forandring av foreslagna parametrar, dvs en sankning av T5 REF samten okning av utloppsmunstycket kan astadkomma ett okat bypass-forhallande. Paden fragan har simuleringar av den modifierade programvaran visat att sa ar fallet.Aven den modell som har anvants for att simulera trycksvangningar i EBK visaren lagre niva med den nya programvaran, vilket var onskvart.
Den andra fragan som stalls ar om det finns andra reglerstrategier som ar battrefor att astadkomma samma effekt. En metod som studerades var att justera tabellensom ger referensvardet for bransleflodet till EBK. Denna metod gav dock ingensankning av de tryckvariationer som onskades. Daremot framkom under arbetetsgang att ett filter troligtvis behovs for att kunna garantera stabilitet. Detta filterhar forts in i den modifierade programvaran och anvants under de simuleringar somgjorts.

Litteraturforteckning
[Aer05] Volvo Aero. The birth of an aircraft engine industry.http://www.volvo.com/volvoaero/global/en-gb/aboutus/history/, Janu-ari 2005.
[Cor98] Volvo Aero Corporation. MOTOR RM12 Uppbyggnad och funktion. In-terndokument, Oktober 1998.
[GE 00] GE Aircraft Engines. SOFTWARE REQUIREMENTS SPECIFICATIONfor the APPLICATION SOFTWARE of the F404/RM12UP FULL AU-THORITY DIGITAL ENGINE CONTROLL. Interndokumentation, Ok-tober 2000. Edition 03.11.
[Gen05] General Electric, The F404 Engine Family.http://www.geae.com/engines/military/f404, Januari 2005.
[LG03] L. Ljung and T. Glad. Reglerteori. Flervariabla och olinjara metoder.Studentlitteratur, Lund, Sweden, 2003.
[LiU03] LiU. Reglerteknik fortsattningskurs M, Grundlaggande Signalbehandling.Studentlitteratur, 2003.
[Mat04] Forsvarets Matrielverk. Beskrivning och funktion motor RM12. Intern-dokument, Januari 2004.
[Wib04] A. Wiborg. Feldiagnos for RM12 baserad pa identifierade modeller. Mas-ter’s thesis LiTH-ISY-EX-3461, Department of Electrical Engineering,Linkoping University, Linkoping, Sweden, Februari 2004.
45

46 Slutsatser

Bilaga A
Modell
5-JAN-2005
Continuous SuperBlockRM12_SYSTEM
Inputs0
Outputs125
Continuous
TT1TT25TT558PS3CPT56NLNHW21PLORNI2WBL3TT31PT25PT1Continuous
10F404_RM12
113491
24 WB33 PWXH6 NZ8 ALT1 M07 TS02 PS05 ALPHA
WFMWFMLVXT2PPXNHPPCVG_XFER_VALVEAUG_PERM_VALVEP3BContinuous
30MFC
324
74212811
14 AC_PLA
WFRLV
WFR
AB_FLAMEContinuous
40ABC
1
5
414
6
AICE_VALVE_OFFA8LVCVGLVFVGAICE_VMONAICE_IMONIPRI_IGN_REL_FBKPRI_IGN_REL_VMONCVGFVGLVSEC_IGN_VMON_USEDSEC_IGN_IMON_USEDA8P1WPBContinuous
50ACTUATORS
14176413769810
511
1345 Continuous
60RM12_Sensors123
45678910
7
3
TT1_ohmsTT25_ohmsTT5_p1_mvTT5_p2_mvTT5_p3_mvTT5_p4_mvTT5_p5_mvTT5_p6_mvTT5_p7_mvTT5_p8_mvP3B_psiPS3C_psiPT56_psiPLO_voltsNL1_hzNL2_hzNH1_hzNH2_hzFlame_hzWFR_ratioWFM_ratioCVGsinCVGcosA8_ratioFVG_ratioAice_indACPLA_ratio
Continuous
70SignalInterface12345678910111213141516171819
12
32101
14 AC_PLA
11
0.005
80FADEC
27
6
9~156
10RM12
1
2
5
6
7
9
11
12
1
2
3
4
5
6
7
M0PS0PT0TT0PWXHWB3ALPHABETANZNYTS0ALTContinuous
WB3
Continuous
12Customer_Bleed_calc
11
12
13
PWXHPWXH = 0
10Gearbox
ALT
0.001
u1
u2
u3
y
21
2
10
M0
0.001
u1
u2
u3
y
131
3
1
RALMAALT_CONM0_CONRT0P0TS0_CONPS0_CONENVIROTS0OFFPS0OFFRPT0TT0
RALMA = 1ALT_CON = 1M0_CON = 1RT0P0 = 1TS0_CON = 1PS0_CON = 1ENVIRO = 1TS0OFF = 1PS0OFF = 1RPT0TT0 = 1
3FliConVar
BiLinear(s)
25FALTT0
7
31
8
Linear (s)
15FALTP0
32
9
TS0
Continuous
4TS0_3WAY
4
5
9
PS0
Continuous
5PS0_3WAY
4
6
2
MNPS0PT0TT0ALPHABETANZNYTS0ALTPS3BPS3CEPS3Linear (s)
99AMBIENT_log_data
################################################### # ## Name : AMBIENT ## ## Version : 1.0 ## ## Reference : 2002VAC002997 "Modellp rm for ## ## RM12SYSTEM" ## ## Created by : Olof Hannius , 7164OH ## ## Last update : 2004-06-17 ## #####################################################
Model description
TT0
0.001
u1
u2
u3
y
9610
4
8
PT0
0.001
u1
u2
u3
y
9510
3
7
ALTM0TS0PS0GAM00H0PT0TT0W1RW21FILAoANZ
Read from
VARIABLE
f404_rm12.Inlet_Out
>Global<
94
Continuous
98SIM_TIME_A
Write toVARIABLE
main.SIMTIME>Global<
1
Write to
VARIABLE
ambient.AMB_OUT
>Global<
6AMBIENT_OUTPUTS
5
6
7
8
6
5
12
1
11
2
78910
4
3 20AMBIENT
Continuous
Lube Oil Warning1
Thrust Warning2
Model description. ################################################################$$ $$$$ Name : FPL39_COCKPIT $$$$ Version : 1.0 $$$$ Reference : 2002VAC002997 "Modellp rm f r $$$$ RM12SYSTEM" $$$$ Created By : Mikael Johansson , 7164MJ $$$$ Last Update : 2004-06-17 $$$$ $$################################################################
4
0.1
2Engine display
T5 Instrument
0.00 1300.00
3
NH Instrument
0.00 100.00
4
5
Linear (s)
13cockpit_switch
AICE
On
Combat
On
Economy
On
Mech mode
On
Sec Ign
On
Offakt. man.
28.00
AC PLA
AC_PLAu1
u2
u3
y
41Off
akt. man.
Off
Anti Ice switchAI_Switch
u1u2u3
y
20
Offakt. man.
Off
Combat Rating switch Combat_Rating_Switchu1
u2u3
y
24
Off
Economy Rating switchOff
akt. man.
Economy_Rating_Switchu1
u2u3
y
27
Offakt. man
103.00
Emergency PLAEmergency_PLA_R
u1
u2
u3
y
31
Offakt. man.
Off
Mech mode switch
Offakt. man.
Off
Secondary IgnitionSecondary_Ignition_Signal
u1u2u3
y
44
AC_PLA
Emergency_PLA
Linear (s)
3pla_input
Write toVARIABLE
cockpit.cockpit_out>Global<
95
Write toVARIABLE
cockpit.cockpit_in>Global<
41234
Mech_Mode_Switchu1
u2u3
y
9
Continuous
15SIM_TIME_C
6
2
3
4
7
5
1
30FPL39_COCKPIT
0.1
ADC_FM_OK
FUNCTIONAL_MODE_ADC
FUNCTIONAL_MODE_ADT
MN_OK
PS0_OK
PT0_OK
ADC_SC_OK
TT0_OK0.1
10sa18_inputs
AFPL_FM_OKAFPL_SC_OKAFPL_TESTMODEEMPLA_NEEDEDENGINE_IN_AIRCRAFTFAULT_CODE_NOT_RECEIVEDMAINTENANCE_MODESMODE_CMDSPECIAL_TEST_MODESTEST_PROHIBITWB3_OKWHEELS_UPWOW
0.1
1sa20_inputs
ALPHA_CAL_OK
BETA_CAL_OK
NY_OK
NZ_OK
SA11_FM_OK
SA11_SC_OK
SA11_TESTMODE
TA_A_OK
TA_C_OK0.1
20sa22_inputs
#################################################### # ## Name : FPL39_1553B ## ## Version : 1.0 ## ## Versionsparm : 2002VAC001502 "RM12System, ## ## utrustningsp rm" ## ## Created by : Andreas Kroon, 7164AK ## ## Last update : 2004-06-17 ## #####################################################
Model_description
Throttle_AngleThrottle_Angle = -37.5 + AC_PLA*75/130
98AC_PLA_2_Throttle_arm_angle
5 AC_PLA
RCV_SUBADDRESS18[32]
CODE
USER
usrsa18_pack
2SA18_PACK_C
8
4
5
COUNTER
RCV_SUBADDRESS20[32]
CODE
USER
usrsa20_pack
4SA20_PACK_C
13
5
COUNTER
WB3
RCV_SUBADDRESS22[32]
CODE
USER
usrsa22_pack
3SA22_PACK_C
8
9
3
COUNTER
MNPS0_mbarPT0_mbarTT0TA_A_CWB3ALPHABETANZNY0.1
21Type_Converter
5
1 M0
2 PS0
3 PT0
4 TT0
6 WB3
7 ALPHA
8 BETA
9 NZ
10 NY
COUNTER
0.1
92SUBADDRESS_UPDATE_COUNTERS
Write toVARIABLE
fpl39_1553b.businputs>Global<
301 M02 PS03 PT04 TT05 AC_PLA6 WB37 ALPHA8 BETA9 NZ10 NY
32DATASTORE
5RCV_SUBADDRESS18
32
32DATASTORE
6RCV_SUBADDRESS22
32
32DATASTORE
16RCV_SUBADDRESS20
32
40FPL39_1553B
1234
678910
6
PT0_M020PS0_M021TT0_M022ALT_M080M0_M081AoA_M082NZ_M084NL_M101NH_M102FVG_M103CVG_M104AC_PLA_M105200Em_PLA_M105201A8LV_M106FN_M107A8_M1085PT25_M120TT25_M121TT25_sens_M124PT31_M125TT31_M126PS3_M129PS3C_sens_M131PT56_sens_M140TT56_M141TT5_sens6_M148101TT5_sens5_M148111TT5_sens4_M148121TT5_sens3_M148131TT5_sens2_M148141TT5_sens1_M148151TT5_sens8_M148161TT5_sens7_M148171PT16_M150PS16_M156PT7_M160WFM_M200WFR_M228P3B_M416Customer_Bleed_M427Power_Offtake_M430XNL_SELXNH_SELPLA_SELT1_SELFRU_CLCFRU_PART_DMDZWFM_DMDXNL_DMDT5_SELT25_CNVZA8_SELZCVG_SELXNH_DMDT25_COMT25GASWfr_torque_motorWFMCVG_transfer_solenoidWfm_torque_motorAB_perm_solenoidPrimary_exciter_ignition_relayA8_torque_motorAI_valve_solenoidFvg_torque_motorFvg_solenoidCvg_torque_motorSecondary_exciter_ignition_relayZFVG_SELPS3_SELP3B_SELPT56_SELT25_HYDROT25_CALCTAU25CVG_TAU_OUTZWFM_SELZWFR_SELCNTRL_MODEAUTO_MBUZCVG_DMDCVG_mekCVGLV_mekZFVG_DMDT5_LEADNH_SSWW1_SSWT25_SSWT25M_SSWPB28_SSWPS3LG_SSWTB28_SSWPS3C_SSWFG_SSWP558_SSWT558H_SSWNHR1DELHVGGGLIGHTP25_SSWW1R_SSWWB28_SSWNL_SSWSSW_modeSSW_mode_delayedK_SSWNLNHFGPT25PT558PS3CTT25TT558HW1RW21TT3PLO_SSNH_takeover_rpsHOLD_SSW_PLA_NH_LOGICHOLD_SSW_SSW_modeSSW_HOLD
Continuous
P25Q0
P15Q0
P31Q25
P3CQ25
WFMQ3C
WFRQ3C
P41Q45
P45Q58
NLPC
NLR
NLRPC
NHPC
NHR25
NHR25PC
NHR41
NLR45
W25R
FN_M107
SFC
Continuous
SUPER
BLOCK
27EngineCalc
1
3
23
22
9
10
3
6
1
1
2
5
8
2
7
5
10
3
8
7
1
1
5
L3PT31_M125TT31_M126W3W25SMHTTG27Q27TM27ALF27
Read from
VARIABLE
f404_rm12.Comp_Out
>Global<
98
PT15TT15W21L21PT14TT14PT25_M120TT25_M121SMLQV15TTG205Q205TM205ALF205BPRFIL
Read from
VARIABLE
f404_rm12.Fan_Out
>Global<
5
TT558PS56PT558W56L5W5PT56TT56_M141PT45TT45QV45TTG47Q47TM47ALF47TTG41Q41TM41ALF41W44L44TT41PT41
Read from
VARIABLE
f404_rm12.Turb_Out
>Global<
97
PS16_M156
W16
PT16_M150
PRL15
W158
Read from
VARIABLEf404_rm12.BPD_Out
>Global<
6
F8W8PT7_M160TT7BPRPT61PT6TT6
Read from
VARIABLEf404_rm12.AftBuNo_Out
>Global<
96
PT39TT39WFMCQV39PS3_M129PS3C
Read from
VARIABLEf404_rm12.Burn_Out
>Global<
4
NL_M101
DNL
Read fromVARIABLE
f404_rm12.LRot_Out>Global<
15
NH_M102
DNHRead fromVARIABLE
f404_rm12.HRot_Out>Global<
10
WFMA8FVGCVGWFRAnti_IceCustomer_Bleed_M427Power_Offtake_M430
Read from
VARIABLEf404_rm12.Indata_Out
>Global<
99
PDROPXFVGRXDIRDXFVGFRFVGTMLFVGLVFVG_FF
Read from
VARIABLEact.FVG_SERVO_OUT
>Global<
95FVG_Servo_Out
CVG
CVGLV
CVGTML
Read fromVARIABLE
act.CVG_SERVO_OUT>Global<
94CVG_Servo_Out
A8FLOW2
A8LV
Read fromVARIABLE
act.VPU_A8_OUT>Global<
93VPU_Out
AICE_VALVE_OFFA8LV_M106CVGLVFVG_M103AICE_VMONAICE_IMONIPRI_IGN_REL_FBKPRI_IGN_REL_VMONCVG_M104FVGLVSEC_IGN_VMONSEC_IGN_IMONA8_M1085P1WPBAICE_STCVG_mekCVGLV_mek
Read from
VARIABLE
act.actuators_out
>Global<
91Actuators_Out
TT1_sensTT25_sens_M124TT5_sens1_M148151TT5_sens2_M148141TT5_sens3_M148131TT5_sens4_M148121TT5_sens5_M148111TT5_sens6_M148101TT5_sens7_M148171TT5_sens8_M148161PS3B_sensPS3C_sens_M131PT56_sens_M140PLO_sensNL_sens1NL_sens2NH_sens1NH_sens2Flame_sens
Read from
VARIABLE
rm12_sensors.sensors_out
>Global<
90RM12_Sensors_Out
TT1_ohmsTT25_ohmsTT5_p1_mvTT5_p2_mvTT5_p3_mvTT5_p4_mvTT5_p5_mvTT5_p6_mvTT5_p7_mvTT5_p8_mvP3B_psiPS3C_psiPT56_psiPLO_voltsNL1_hzNL2_hzNH1_hzNH2_hzFlame_hzAice_indWFR_ratioWFM_ratioCVGsinCVGcosA8_ratioFVG_ratioACPLA_ratio
Read from
VARIABLE
signal_interface.interface_out
>Global<
89Signal_Interface_Out
ABPREVWFRPS3FMVPS3CPPABPPPWFRTMFWFRLVWFR_M228AB_FLAME
Read from
VARIABLEabc.AB_CONTROL_OUT
>Global<
88ABC_Out
WFM_XFER_VALVECVG_XFER_VALVEAUG_PERM_VALVEWFM_M200WFMLVXRUPPXT2PPXNHPPXP3PPXP3MULXT2SRXP3PP0P3B_M416
Read from
VARIABLEmfc.MFC_OUT>Global<
87MFC_Out
Wfr_torque_motorWFMCVG_transfer_solenoidWfm_torque_motorAB_perm_solenoidPrimary_exciter_ignition_relayA8_torque_motorAI_valve_solenoidFvg_torque_motorFvg_solenoidCvg_torque_motorSecondary_exciter_ignition_relay
Read from
VARIABLE
fadec.fadecut
>Global<
13FADEC_Out
ALT_M080M0_M081TS0PS0_M021GAM00H0PT0_M020TT0_M022W1RW21FILAoA_M082NZ_M084
Read from
VARIABLE
f404_rm12.Inlet_Out
>Global<
1
Mech_Mode_SwitchAI_SwitchCombat_Rating_SwitchEconomy_Rating_SwitchSecondary_Ignition_SignalAC_PLA_M105200Em_PLA_M105201
Read fromVARIABLE
cockpit.cockpit_out>Global<
92Cockpit_Out
XNL_SELXNH_SELPLA_SELT1_SELFRU_CLCFRU_PART_DMDZWFM_DMDXNL_DMDT5_SELT25_CNVZA8_SELZCVG_SELXNH_DMDT25_COMT25GASXNH_CVG_OUTZFVG_SELPS3_SELP3B_SELPT56_SELT25_HYDROT25_CALCTAU25CVG_TAU_OUTZWFM_SELZWFR_SELCNTRL_MODEAUTO_MBUZCVG_DMDZFVG_DMDT5_LEADContinuous
86Fadec_internal_data
M0PS0PT0TT0PWXHWB3ALPHABETANZNYTS0ALT
Read from
VARIABLE
ambient.AMB_OUT
>Global<
2AMBIENT_OUT
18
Read from
VARIABLE
SSW.SSW_Outputs
>Global<
85SSW_Outputs
19
Read from
VARIABLE
SSW.Mix_Perf_SSW_out
>Global<
84SSW_Mix_Perf_SSW_out
15
2021
1718
25
34
35
36
22 8
9
4041
10
11
14
16
8182
19
2324
262728293031
3233
38
37
39
5758596061626364656667
1
2
3
45
67
1213
424344454647484950515253545556686970717273747576777879808384
85:102
103:121
50RigDataLog
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121
Figur A.1. RM12 SYSTEM
47

48 Modell
5-JAN-2005
Continuous SuperBlockRM12
Inputs15
Outputs0
Continuous
TT21
W21
PT14
TT14
H14
FA15
TT25
PT25
H25
PT15
TT15
L21
SML
TM205
RNI2
Continuous
6E1_FAN
4
3
3
WBL25HBL25WBL41HBL41WBL44HBL44WBL46HBL46WBL49HBL49W25TT31PT31FA31H31W305L3QUS27TT3WB3SMHW3MW31WAI
Continuous
7E3_COMPRESSOR
3
3
3
3
EB
W34
PT39
H39
WFMC
PS3C
TM34
PS3Continuous
5E4_BURNER
2
6
2
PT558
W56
FA56
H56
QDS47
PS56
W41
QUS41
L5
L44
TT5
TT558
PT56Continuous
13E5_TURBINES
10
5
2
2
BPR
PT6
Continuous
14NOZZLE
E6_AFTERBURNER_
2
3
5
2
2
NH
EXTPOWContinuous
4E7_HP_ROTOR
NL
POWLOSSContinuous
99E8_LP_ROTOR
H16
W158
W16
Q14
M16Continuous
2DUCT
E2_BYPASS_
4
WFM
A8
FVG
CVG
WFR
Anti_Ice
Customer_Bleed
Power_OfftakeContinuous
20E_CONTROL_INPUT
1
2
3
4
5
6 AntiIce
7 CustomerBleed
8 PowerOfftake
DESCRIPTION: RM12 transient engine model
FILE:f404_rm12.sbd
DATE:2003-10-24version 1.00
Model_Name_F404_RM12
121
40SCAT
PS0H0PT0TT0W1RW21FILM0ALTGAM00TS0AoANZ
Continuous
12E0_INLET
2
10 ALT
11 M0
12 TS0
13 PS0
14 AoA
9 NZ
TT1TT25TT558PS3CPT56NLNHW21PLORNI2PTOWBL3HBL3TT31PT25PT1
Continuous
43MEASUREMENTE_CONTROL_
T5HD56
4
2
3PS3C
2NL
2PLO
Read fromVARIABLE
f404_rm12.rm12_SCAT>Global<
97read_SCAT
Read fromVARIABLE
f404_rm12.rm12_Tflow>Global<
96
21
45Factors
Turbine_Flow_
PLO
Continuous
3PRESSURE
E9_LUBE_OIL_
4
12
1
TT1
TT25
TT558
PS3C
PT56
NL
NH
W21
PLO
RNI2
PTO
WBL3
HBL3
TT31
PT25
PT1
K_SSW
Continuous
62START_STOP
WFM_SS
A8_SS
FVG_SS
CVG_SS
WFR_SSContinuous
94INPUTS_STAND_BY_LOGIC
17
1 WFM
2 A8
3 FVG
4 CVG
5 WFR
1
2
3
4
5
6
7
8
9
10
11
12
13
14
10F404_RM12
1134912
43681725
Continuous
MODELL:MFC
Created: 2002-02-28
Latest Change: 2002-03-03
RevLog: 2002VAC00xxx.
1
CockpitInput from
1 PLA
31
FADECInput from
2 WFM_TM_CURRENT
3 WFMCVG_SOLENOID_DRIVE
4 AUG_PERM_SOLENOID_DRIVE
61
EngineInput from
5 NH
6 PS3C
7 TT25
8 TT3
9 W21
10 WBL3
XT2PP
XNHPP
XP3PP
XP3MUL
XT2SR
XP3PP0
P3BContinuous
5ENGINE SIGNALS_H1_3
5
3
1
2
6
4
WFM_XFER_VALVE
CVG_XFER_VALVE
AUG_PERM_VALVEContinuous
15SOLENOIDS_H1_1
2
3
WFM
WFMLV
XRUPP
Continuous
99WFM CONTROL_H1_4
PLA
1WFM_TMC
1WFM_XFER_VALVE
1 NH
1 XT2PP
2 XNHPP
3 XP3PP
4 XP3MUL
Write to
VARIABLE
mfc.MFC_OUT
>Global<
6MFC_OUT
1 WFM_XFER_VALVE
2 CVG_XFER_VALVE
3 AUG_PERM_VALVE
1 WFM
2 WFMLV
3 XRUPP
1 XT2PP
2 XNHPP
3 XP3PP
4 XP3MUL
5 XT2SR
6 XP3PP0
7 P3B
Write to
VARIABLE
mfc.MFC_IN
>Global<
4MFC_IN
1 PLA
2 WFM_TM_CURRENT
3 WFMCVG_SOLENOID_DRIVE
4 AUG_PERM_SOLENOID_DRIVE
5 NH
6 PS3C
7 TT25
8 TT3
9 W21
10 WBL3
3
4
7
5
6
1
2
30MFC
324
74212811
14
Continuous
WFRPS3
WFRLV
WFRTMFContinuous
8WFR LVDT_H2_2WFR TM TO
5
1
1 WFR_TM_CURRENT FMV
PS3CPP
Continuous
9DEPENDENCE_H2_3
WFR PS3
1
4
2
2 PS3C
WFR
ABPPP
Continuous
10WFR FLOW_H2_4
1
6
7
3L28
L27
L26
KABC3
ABFIG2
KDP
ABPREVContinuous
11CALCULATION_H2_1
AB LIMIT
2
3 P1WPB
4 AUG_PERM
Write to
VARIABLE
abc.AB_CONTROL_OUT
>Global<
267
1
3
2
1
2
2
1
AB_FLAME
Continuous
33FLAME SENSOR_H3
1 WFR
T5_Error
5 AB_IGNIWrite to
VARIABLE
abc.ABC_in
>Global<
1ABC_in
1 WFR_TM_CURRENT
2 PS3C
3 P1WPB
4 AUG_PERM
5 AB_IGNI
T5_ErrorRead fromVARIABLE
abc.T5_Error_for_ABC>Global<
32
1
2
3
40ABC
1
5
414
6
Continuous
1
4AMBIENT
INPUTS FROM
1 PT0
2 TT0
1
14FROM FADECINPUTS
7 AICE_REQUEST
8 A8_TM_CURRENT
9 FVG_SOL_DRIVE
10 FVG_TM_CURRENT
11 CVG_TM_CURRENT
16 PRIM_IGN_RELAY
17 SEC_IGN_REQ
1
2FROM MFCINPUTS
12 WFM
13 XT2PP
14 XNHPP
15 CVG_XFER_VALVE
1
5ENGINE
INPUTS FROM
5 PS3C
6 PT25
3 NH
4 NL
IPRI_IGN_REL_FBK
PRI_IGN_REL_VMONContinuous
16PRIM_IGNITER
6PRIM_IGN_RELAY
SEC_IGN_VMON_USED
SEC_IGN_IMON_USEDContinuous
6SEC_IGNITER
7
AICE_VALVE_OFF
AICE_VMON
AICE_IMON
AICE_STContinuous
15ANTI_ICE_VALVE
1AICE_REQUEST
3 NH
FVGLV
FVG
Continuous
7FVG SERVO_H5
2 P1WPB
1 CVG
1 PT0
2 TT0
4 NL
4 FVG_TM_CURRENT
3 FVG_SOL_DRIVE
A8LV
A8Continuous
97VPU_A8ACTUATOR_H4
2 A8_TM_CURRENT
3 NH
CVG
P1WPB
CVGLV
CVG_mek
CVGLV_mekContinuous
12CVG SERVO_H6
1 PS3C
2 PT25
1 WFM
3 XNHPP
2 XT2PP
4CVG_XFER_VALVE
5CVG_TM_CURRENT Write to
VARIABLE
act.actuators_out
>Global<
99Actuators_out
1
23
4
1
2
3
1
2
45
2
1
12
12
Write to
VARIABLE
act.actuators_in
>Global<
3Actuators_in
1234567891011121314151617
7
8
11
12
1
5
6
4
10
2
13
3
9
14
50ACTUATORS
14176413769810
511
1345 Continuous
TT5_sens1
TT5_sens2
TT5_sens3
TT5_sens4
TT5_sens5
TT5_sens6
TT5_sens7
TT5_sens8Continuous
2T5_SENSORS
1 TT1
5 PS3C
11 RNI2
3 TT558
TT1_sens
Continuous
3T1_SENSOR
1 TT1
9 W21
PS3C_sens
Continuous
13PS3C_SENSOR
5 PS3C
PLO_sens
Continuous
4Lube_Oil_Pressure
10 PLO
TT25_sens
Continuous
11T25_SENSOR
2 TT25
9 W21
Flame_sens
Continuous
5FLAME_SENSOR
12 AB_FLAME
NL_sens1
NL_sens2Continuous
99NL_SENSOR
7 NL
NH_sens1
NH_sens2Continuous
14NH_SENSOR
8 NH
PT56_sens
Continuous
98PT56_SENSOR
6 PT56
PS3B_sens
Continuous
97PS3B_SENSOR
4 P3B
Name : RM12_Sensors Version : 1.0Documentation: 2002VAC001905Resp : Melker Haerefors 7164MHLast update : 2002-06-18
Write toVARIABLE
rm12_sensors.sensors_in>Global<
96sensors_in
123456789101112
Write toVARIABLE
rm12_sensors.sensors_out>Global<
6sensors_out
12345678
1212
3
4
5
6
7
8
9
10
1
12
14
2
19
15
16
17
18
13
11
60RM12_Sensors12345678910
7
3
Continuous
1.8
98deg_to_rankine
1 TT1_sens TT1_ohms
Linear
6Invers_T1CNV_TAB
1.8
13deg_to_rankine
2 TT25_sens TT25_ohms
Linear
16Invers_T25CNV_TAB
1.8
1deg_to_rankine
3 TT5_sens1 TT5_p1_mv
Linear
7Invers_T5CNV_TAB
1.8
2deg_to_rankine
4 TT5_sens2 TT5_p2_mv
Linear
3Invers_T5CNV_TAB
1.8
4deg_to_rankine
5 TT5_sens3 TT5_p3_mv
Linear
5Invers_T5CNV_TAB
1.8
8deg_to_rankine
6 TT5_sens4 TT5_p4_mv
Linear
9Invers_T5CNV_TAB
1.8
10deg_to_rankine
7 TT5_sens5 TT5_p5_mv
Linear
11Invers_T5CNV_TAB
1.8
12deg_to_rankine
8 TT5_sens6 TT5_p6_mv
Linear
14Invers_T5CNV_TAB
1.8
15deg_to_rankine
9 TT5_sens7 TT5_p7_mv
Linear
17Invers_T5CNV_TAB
1.8
18deg_to_rankine
10 TT5_sens8 TT5_p8_mv
Linear
19Invers_T5CNV_TAB
P3B_psi0.14504
21kPa_to_Psi
11 P3B_sens
PLO_volts0.025
26Psi_to_V
Flame_hz1
20
19 Flame_sens
NL1_hz1
34
15 NL1_sens
NH2_hz1
44
18 NH2_sens
NL2_hz1
22
16 NL2_sens
NH1_hz1
23
17 NH1_sens
Aice_ind1
29
25 AICE_VALVE_OFF
PS3C_psi0.14504
30kPa_to_Psi
12 PS3C_sens
PT56_psi0.14504
31kPa_to_Psi
13 PT56_sens
0.14504
33kPa_to_Psi
14 PLO_sens
WFR_ratioWFR_ratio = -(WFRLV - 111.76)/235.29
99
20 WFRLV
WFM_ratioWFM_ratio = WFMLV*0.393/ 100 + 0.091
25
21 WFMLV
A8_ratioA8_ratio = -(A8LV - 141.79)/298.5
24
23 A8LV
FVG_ratioFVG_ratio = (FVGLV + 27.78)/255.56
27
24 FVGLV
ACPLA_ratioACPLA_ratio = -(AC_PLA_RVDT_Secondary - 65)/130
32
26 AC_PLA_RVDT_Secondary
CVG_angleCVG_angle = (CVGRES + 18.82)/1.47
28
22 CVGRES
Name : Signal_Interface
Version : 1.0
Documentation: VAC2002...
Resp : Melker Haerefors 7164MH
Last update : 2002-06-18
SIN(u)
96
COS(u)
95
CVGsin0.5
97
0.01745
94deg2rad
CVGcos0.5
35
Write to
VARIABLE
signal_interface.interface_in
>Global<
93Interface_In
1:26 26
Write to
VARIABLE
signal_interface.interface_out
>Global<
92Interface_Out
1
2
3
4
5
6
7
8
9
10
11
14
19
15
18
16
17
26
12
13
20
21
24
25
27
22
23
70SignalInterface12345678910111213141516171819
12
32101
14
11
0.0050.005
1F_Autonomous_Input_System
1 TT1_ohms
2 TT25_ohms
3 TT5_p1_mv
4 TT5_p2_mv
5 TT5_p3_mv
6 TT5_p4_mv
7 TT5_p5_mv
8 TT5_p6_mv
9 TT5_p7_mv
10 TT5_p8_mv
11 P3B_psi
12 PS3C_psi
13 PT56_psi
14 PLO_volts
15 NL1_hz
16 NL2_hz
17 NH1_hz
18 NH2_hz
19 Flame_hz
20 Wfr_ratio
21 Wfm_ratio
22 CVG_sin
23 CVG_cos
24 A8_ratio
25 FVG_ratio
26 Aice_ind
27 ACPLA_ratio
28 AICE_VMON
29 AICE_IMON
30 IPRI_IGN_REL_FBK
31 PRI_IGN_REL_VMON
32 SEC_IGN_VMON
33 SEC_IGN_IMON
34 Mech_Mode_Switch
35 AI_Switch
36 Combat_Rating_Switch
37 Economy_Rating_Switch
38 Emergency_PLA_RVDT
39 Secondary_Ignition_Signal
2
Wfr_Torque_Motor
WFMCVG_Transfer_Solenoid
Wfm_Torque_Motor
AB_Perm_Solenoid
Primary_Exciter_Ignition_Relay
A8_Torque_Motor
Vdc_28_to_AI_Valve_Solenoid
FVG_Torque_Motor
FVG_Solenoid
CVG_Torque_Motor
Vdc_28_to_Secondary_Excitor
0.005
15F_Processing_System
#################################################### # ## Name : FADEC ## ## Version : 1 ## ## Versionsp rm : 2002VAC000749 "Modellp rm f r ## FADEC" ## ## Created by : Torbj rn Norlander, 7164TN ## ## Last update : 2004-08-18 ## ## SW-edition : 3.2 ## #####################################################
1
2
3
4
5
6
7
8
9
10
11
80FADEC
27
6
9~156
Figur A.2. Delmodell RM12 till RM12 SYSTEM
Bilaga B
Moduler
VOLVO PROPRIETARY INFORMATION Portions of this document is theproperty of Volvo Aero Corporation. It shall not - either in its original or in anymodified form, in whole or in part - be reproduced,disclosed to a third party, orused for any purpose other than that for which it is supplied, without the writtenconsent of Volvo Aero Corporation. Any infringement of these conditions will beliable to legal action.
49

50 Moduler
DIAG NAME FILE NAME
DESC
UPDATE TIME MOD DATE SHEET0.01 03-Feb-2005 1 of 1
X1.0
CELCMULT celcmult.net
A8T5_SCLR Schedule
ZA8_K_WFR
A8T5_SCLR_ADJ_TAB
(ADJUSTABLE)
A8T5_SCLR_ADJ_PTR
T1_MULT_ADJ_TAB
(ADJUSTABLE)
T1_MULT_PTR
PT0_MULT_ADJ_TAB
(ADJUSTABLE)
PT0_MULT_PTR
T1_SEL
PT0_SEL
R2K1.8
PSI2KPA6.894757
T1_MULT
PT0_MULT
Not
A8T5_SCLR0.0
WFR_HOLD
A8T5_SCLR_ADJ_TAB_OUT
1R
1R
1R
N
1R
D1R
1R
1R 1R
1R
1R
1R
F
1B1B
1R
1R
T
1R
VOLVO AERO PROPRIETARY INFORMATION
Figur B.1. Modul CELCMULT beraknar utsignalerna A8T5 SCLR, PT0 MULT samtT1 MULT. Dessa anvands for att paverka ZA8 K WFR, T5 REF samt ZA8 DMD SEL.
Dynamic Block
−90
T5_SCLR_JM
T5_REF
T1_SEL, mfl.
ProductA8T5_SCLR
???
Figur B.2. Modul CELCT5DM beraknar referensvardet till turbintemperaturen(T5 REF). Beroende pa vardet pa A8T5 SCLR sanks T5 REF med mellan 0 till 90 Rank-ine.

51
ZA8_DMD_SEL
T1_MULT Product1
Product
PT0_MULT
PLA_SEL
Look−UpTable
???
Dynamic Block
Figur B.3. Modul CA8CDMDS beraknar borvardet till utloppsmunstyckets area(ZA8 DMD SEL). Beroende pa vardet pa PT0 MULT och T1 MULT justerasZA8 DMD SEL till lamplig niva.
H1(z)
ZA8_SEL ZA8_K_WFR
SwitchProduct
???
Dynamic Block
10
A8_SCLR_JM
1
A8_SCLR_FILT_JMA8T5_SCLR
0.03382+0.03382z −1
1−0.9324z −1
Figur B.4. Mudul CA8CMULT beraknar ZA8 K WFR som ar justerad uppmatt utlopp-sarea.

52 Moduler

Bilaga C
Simuleringsresultat
T1_sel
320300280260240220 340
BP
R
0.4
0.35
0.3
0.25
0.2
0.45
Ej Modifierad
T1_sel
320300280260240220 340
BP
R
0.4
0.35
0.3
0.25
0.2
0.45
Modifierad
Figur C.1. Figuren visar bypass-forhallandet for varierande inloppstemperaturer. Simu-leringar har gjorts med varierande tryck, temperatur och hastighet enligt tabell 6.1 ochmatningarna ar samplade nar stationaritet har uppnatts.
53

54 Simuleringsresultat
T1_sel
320300280260240220 340
PS
16
D
5
4
3
2
1
0
6
Ej Modifierad
T1_sel
320300280260240220 340
PS
16
D
5
4
3
2
1
0
6
Modifierad
Figur C.2. Figuren visar PS16D (trycksvangningsamplitud) for varierande inloppstem-peraturer. Simuleringar har gjorts med varierande tryck, temperatur och hastighet enligttabell 6.1 och matningarna ar samplade nar stationaritet har uppnatts.

55
BPR
0.450.40.350.30.250.2 0.5
PS
16
D/P
T5
6%
1.5
1
0.5
0
2
Ej Modifierad
BPR
0.450.40.350.30.250.2 0.5
PS
16
D/P
T5
6%
1.5
1
0.5
0
2
Modifierad
Figur C.3. Figuren visar PS16D´s storlek i procent i forhallande till PT56 (totaltryckefter turbiner). Simuleringar har gjorts med varierande tryck, temperatur och hastighetenligt tabell 6.1 och matningarna ar samplade nar stationaritet har uppnatts.

56 Simuleringsresultat
ZA8_K_WFR
50403020100 60
PS
16
D
6
5
4
3
2
1
0
7
Ej Modifierad
ZA8_K_WFR
50403020100 60
PS
16
D
6
5
4
3
2
1
0
7
Modifierad
Figur C.4. Figuren visar PS16D som funktion av ZA8 K WFR. Simuleringar har gjortsmed varierande tryck, temperatur och hastighet enligt tabell 6.1 och matningarna arsamplade nar stationaritet har uppnatts.

57
Tid [s]
120100806040200 140
PLA
[deg]
120
100
80
60
40
20
140
Tid [s]
120100806040200 140
Dra
gkra
ft [kN
] 80
60
40
20
0
100
Tid [s]
120100806040200 140
BP
R [-]
0.6
0.5
0.4
0.3
0.2
0.7
Tid [s]
120100806040200 140
ZA
8_K
_W
FR
[-]
60
40
20
0
80
Tid [s]
120100806040200 140
T5 [R
]
2000
1800
1600
1400
1200
1000
2200
Tid [s]
120100806040200 140
A8 [m
^2]
0.26
0.24
0.22
0.2
0.18
0.16
0.14
0.28
Tid [s]
120100806040200 140
NL [rp
s]
200
180
160
140
120
220
Tid [s]
120100806040200 140
NH
[rp
s]
270
260
250
240
230
220
210
280
Figur C.5. Simulering i PC med olika gaspadrag. Heldragen: Programvara version3.20x, Streckad: Programvara version 3.20.

58 Simuleringsresultat
Tid [s]
86420 10
PLA
[deg]
130
125
120
115
110
105
100
135
Tid [s]
86420 10
Dra
gkra
ft [kN
] 85
80
75
70
65
60
55
90
Tid [s]
86420 10
BP
R [-]
0.34
0.32
0.3
0.28
0.26
0.36
Tid [s]
86420 10
ZA
8_K
_W
FR
[-] 40
30
20
10
0
50
Tid [s]
86420 10
T5 [R
]
2060
2040
2020
2000
1980
1960
2080
Tid [s]
86420 10
A8 [m
^2]
0.22
0.2
0.18
0.16
0.14
0.24
Tid [s]
86420 10
NL [rp
s]
212
211.5
211
210.5
210
209.5
209
208.5
212.5
Tid [s]
86420 10
NH
[rp
s]
278
277
276
275
274
273
272
279
Figur C.6. Simulering i PC med gaspadrag fran MS till MT langsamt under 10 sekunder.Heldragen: Programvara version 3.20x, Streckad: Programvara version 3.20.

59
Tid [s]
43210 5
PLA
[deg]
130
125
120
115
110
105
100
135
Tid [s]
43210 5
Dra
gkra
ft [kN
] 85
80
75
70
65
60
55
90
Tid [s]
43210 5
BP
R [-]
0.34
0.33
0.32
0.31
0.3
0.29
0.28
0.27
0.35
Tid [s]
43210 5
ZA
8_K
_W
FR
[-] 50
40
30
20
10
0
60
Tid [s]
43210 5
T5 [R
]
2060
2040
2020
2000
1980
1960
2080
Tid [s]
43210 5
A8 [m
^2]
0.22
0.2
0.18
0.16
0.14
0.24
Tid [s]
43210 5
NL [rp
s]
212
211
210
209
208
213
Tid [s]
43210 5
NH
[rp
s]
277
276
275
274
273
278
Figur C.7. Simulering i PC med gaspadrag fran MS till MT som ett stegpadrag. Hel-dragen: Programvara version 3.20x, Streckad: Programvara version 3.20.

60 Simuleringsresultat
Tid [s]
43210 5
PLA
[deg]
114
112
110
108
106
104
102
116
Tid [s]
43210 5
Dra
gkra
ft [kN
]
70
65
60
55
75
Tid [s]
43210 5
BP
R [-]
0.34
0.33
0.32
0.31
0.3
0.29
0.28
0.35
Tid [s]
43210 5
ZA
8_K
_W
FR
[-] 35
30
25
20
15
10
5
40
Tid [s]
43210 5
T5 [R
]
2060
2040
2020
2000
1980
1960
2080
Tid [s]
43210 5
A8 [m
^2]
0.21
0.2
0.19
0.18
0.17
0.16
0.15
0.22
Tid [s]
43210 5
NL [rp
s]
212
211
210
209
213
Tid [s]
43210 5
NH
[rp
s]
277
276
275
274
273
272
278
Figur C.8. Simulering i PC med gaspadrag fran MS till PLA 115◦ som ett stegpadrag.Heldragen: Programvara version 3.20x, Streckad: Programvara version 3.20.

61
Tid [s]
86420 10
PLA
[deg]
130
125
120
115
110
105
100
135
Tid [s]
86420 10
Dra
gkra
ft [kN
] 85
80
75
70
65
60
55
90
Tid [s]
86420 10
BP
R [-]
0.34
0.33
0.32
0.31
0.3
0.29
0.28
0.27
0.35
Tid [s]
86420 10
ZA
8_K
_W
FR
[-] 40
30
20
10
0
50
Tid [s]
86420 10
T5 [R
]
2060
2040
2020
2000
1980
1960
2080
Tid [s]
86420 10
A8 [m
^2]
0.22
0.2
0.18
0.16
0.14
0.24
Tid [s]
86420 10
A8_S
CLR
_O
UT
[-]
8
6
4
2
0
10
Tid [s]
86420 10
A8T
5_S
CLR
[-] 0.8
0.6
0.4
0.2
0
1
Figur C.9. Simulering i PC med gaspadrag fran MS till MT som visar skillnaden mel-lan att anvanda filter 5.9 och utan. Heldragen: Programvara version 3.20x med filter,Streckad: Programvara version 3.20x utan filter.

62 Simuleringsresultat

Bilaga D
Frekvensanalys
For att undersoka om sjalvsvangningarna pa signalen ZA8 K WFR ar insignals-beroende simuleras modellen med olika insignaler. Simuleringarna visar att dendominerande frekvensen blir densamma for olika insignaler.
a b
0 5 10 15 20 250
5
10
15
20
25
30
35
40
45
50
Tid [s]
ZA
8 K
WF
R
2 4 6 8 10 12 14 16 18−30
−20
−10
0
10
20
30
Frequency (Hz)
Pow
er S
pect
ral D
ensi
ty (
dB/H
z)
Welch PSD Estimate
(a) (b)
Figur D.1. Bestamning av sjalvsvangningsfrekvens. (a) Streckad: Begart arearefer-ensvarde ar en konstant med varde 35. Heldragen: Den justerade aterkopplade aktu-atorpossitionen ZA8 K WFR (b) Spektraltathet enligt welch metod pa ZA8 K WFR.
63

64 Frekvensanalys
a b
0 5 10 15 20 250
10
20
30
40
50
60
Tid [s]
ZA
8 K
WF
R
2 4 6 8 10 12 14 16 18−30
−20
−10
0
10
20
30
Frequency (Hz)
Pow
er S
pect
ral D
ensi
ty (
dB/H
z)
Welch PSD Estimate
(a) (b)
Figur D.2. Bestamning av sjalvsvangningsfrekvens. (a) Streckad: Begart arearefer-ensvarde ar en sinussignal med amplitud 1 och en frekvens pi rad/sekund samt en biaspa 35. Heldragen: Den justerade aterkopplade aktuatorpossitionen ZA8 K WFR. (b)Spektraltathet enligt welch metod pa ZA8 K WFR.
a b
0 5 10 15 20 250
10
20
30
40
50
60
Tid [s]
ZA
8 K
WF
R
2 4 6 8 10 12 14 16 18−30
−20
−10
0
10
20
Frequency (Hz)
Pow
er S
pect
ral D
ensi
ty (
dB/H
z)
Welch PSD Estimate
(a) (b)
Figur D.3. Bestamning av sjalvsvangningsfrekvens. (a) Streckad: Begart arearef-erensvarde ar en ramp. Heldragen: Den justerade aterkopplade aktuatorpossitionenZA8 K WFR. (b) Spektraltathet enligt welch metod pa ZA8 K WFR.

På svenska Detta dokument hålls tillgängligt på Internet – eller dess framtida ersättare – under en längre tid från publiceringsdatum under förutsättning att inga extra-ordinära omständigheter uppstår.
Tillgång till dokumentet innebär tillstånd för var och en att läsa, ladda ner, skriva ut enstaka kopior för enskilt bruk och att använda det oförändrat för ickekommersiell forskning och för undervisning. Överföring av upphovsrätten vid en senare tidpunkt kan inte upphäva detta tillstånd. All annan användning av dokumentet kräver upphovsmannens medgivande. För att garantera äktheten, säkerheten och tillgängligheten finns det lösningar av teknisk och administrativ art.
Upphovsmannens ideella rätt innefattar rätt att bli nämnd som upphovsman i den omfattning som god sed kräver vid användning av dokumentet på ovan beskrivna sätt samt skydd mot att dokumentet ändras eller presenteras i sådan form eller i sådant sammanhang som är kränkande för upphovsmannens litterära eller konstnärliga anseende eller egenart.
För ytterligare information om Linköping University Electronic Press se förlagets hemsida http://www.ep.liu.se/ In English The publishers will keep this document online on the Internet - or its possible replacement - for a considerable time from the date of publication barring exceptional circumstances.
The online availability of the document implies a permanent permission for anyone to read, to download, to print out single copies for your own use and to use it unchanged for any non-commercial research and educational purpose. Subsequent transfers of copyright cannot revoke this permission. All other uses of the document are conditional on the consent of the copyright owner. The publisher has taken technical and administrative measures to assure authenticity, security and accessibility.
According to intellectual property law the author has the right to be mentioned when his/her work is accessed as described above and to be protected against infringement.
For additional information about the Linköping University Electronic Press and its procedures for publication and for assurance of document integrity, please refer to its WWW home page: http://www.ep.liu.se/ © [Jonas Ervestrand]