새로운 출력전압 고조파 제거ups 알고리즘 개발 …-3-기술지원성과 요약서...
TRANSCRIPT

새로운 출력전압 고조파 제거새로운 출력전압 고조파 제거새로운 출력전압 고조파 제거새로운 출력전압 고조파 제거UPSUPSUPSUPS
알고리즘 개발 기술지원알고리즘 개발 기술지원알고리즘 개발 기술지원알고리즘 개발 기술지원
2006. 6.2006. 6.2006. 6.2006. 6.
지원기관 한국전기연구원지원기관 한국전기연구원지원기관 한국전기연구원지원기관 한국전기연구원::::
지원기업 주 맥 스 컴지원기업 주 맥 스 컴지원기업 주 맥 스 컴지원기업 주 맥 스 컴: ( ): ( ): ( ): ( )
산 업 자 원 부산 업 자 원 부산 업 자 원 부산 업 자 원 부

- 2 -
편집순서 2
제 출 문제 출 문제 출 문제 출 문
산 업 자 원 부 장 관 귀 하산 업 자 원 부 장 관 귀 하산 업 자 원 부 장 관 귀 하산 업 자 원 부 장 관 귀 하
본 보고서를 새로운 출력전압 고조파 제거 알고리즘 개발 기술지원 지원기“ UPS ”(
간 과제의 기술지원성과보고서로 제출합니다: 2005. 6. 01 ~ 2006. 5. 31) .
2006. 6. 30.2006. 6. 30.2006. 6. 30.2006. 6. 30.
지원기관지원기관지원기관지원기관 :::: 기관명 한 국 전 기 연 구 원기관명 한 국 전 기 연 구 원기관명 한 국 전 기 연 구 원기관명 한 국 전 기 연 구 원( )( )( )( )
대표자 박 동 욱대표자 박 동 욱대표자 박 동 욱대표자 박 동 욱( )( )( )( )
지원기관지원기관지원기관지원기관 :::: 기업명 주 맥스컴기업명 주 맥스컴기업명 주 맥스컴기업명 주 맥스컴( ) ( )( ) ( )( ) ( )( ) ( )
대표자 박 경대표자 박 경대표자 박 경대표자 박 경( )( )( )( )
지원책임자지원책임자지원책임자지원책임자 :::: 민 병 덕민 병 덕민 병 덕민 병 덕
참여연구원참여연구원참여연구원참여연구원 :::: 김 태 진김 태 진김 태 진김 태 진
::::〃〃〃〃 김 종 현김 종 현김 종 현김 종 현
::::〃〃〃〃 박 용 환박 용 환박 용 환박 용 환

- 3 -
기술지원성과 요약서기술지원성과 요약서기술지원성과 요약서기술지원성과 요약서
과제고유번호 연구기간 개월2005. 6. 1 ~ 2006. 5. 31 (12 )
연구사업명 부품소재종합기술지원사업
지워노가제명 새로운 출력전압 고조파 제거 알고리즘 개발 기술지원UPS
지원책임자 민병덕 지원연구원수
총 명: 4
내부 명: 3
외부 명: 1
총
사업비
정부 천워: 93,650
기업 천원: 93,650
계 천원: 187,500
지원기관명 한국전기연구원 소속부서명 산업전기연구단
지원기업 기업명 주 맥스컴 기술책임자 강덕형: ( ) :
요약 연구결과를 중심으로 개조식 자 이내( 500 P보고서
면수73
무정전 전원장치는 정전압 정주파수의 전원공급 능력뿐만 아니라 부하조건에 관계없이 최소한의,
를 가지는 정현파의 출력전압을 제공해야 하는데 일반적인 전자THD(Total harmonic Distortion) ,
부하들은 대부분 정류기와 같은 비선형 부하이고 이에 따른 부하전류의 고조파 성분으로 인하여,
무정전 전원장치 출력전입의 가 크게 증가하게 된다 따라서 전압왜형을 발생하는 출력전압에THD .
서 고조파를 제거하는 것이 필수적이다 고조파제거를 위한 여러 가지 방안에 제안되고 있어 기존.
의 여러 방안에 대하 조사 및 분석을 하였다 고조파 전류에 의한 고조파 전압 발생에 대한원인S .
분석을 통하여 필터의 설계로부터 고조파 전압왜곡을 방지할 수 있는 가이드라인을 제공하였다.
조사된 방식 중 디지털 프로세서로 구현이 가능한 고조파분석 방법에 대해서 집중적으로 연구하여
디지털 프로세서로 구현을 하여 성능을 입증하였다.
색 인 어
각 개 이상( 5 )
한 글 고조파 무정전전원장치 전압왜곡 퓨리에변환 필터설계, , , ,
영 어 THD, UPS Voltage Distortion, FFT, Filter Design

- 4 -
기술지원성과 요약문기술지원성과 요약문기술지원성과 요약문기술지원성과 요약문
사업목표사업목표사업목표사업목표1.1.1.1.
에서 중요한 출력전압 고조파 제거에 관한 마이크로프로세서 기반의 알고리즘을 조UPS
사 연구하여 제공한다.
기술지원내용 및 범위기술지원내용 및 범위기술지원내용 및 범위기술지원내용 및 범위2.2.2.2.
고조파해석 기술 전수
고조파 제거를 위한 기본 개념 전수
마이크로프로세서 제어기 설계 기술 전수
고조파 제거를 위한 알고리즘 개발 전수
지원실적지원실적지원실적지원실적3.3.3.3.
지원항목지원내용
비고기술지원前 기술지원後
전압 THD 9.73% 3.14% 측정PM3000
마이컴을 이용한
알고리즘- 제공 프로그램
필터설계법 - 제공 특허출원
지원항목 번항목의 기술지원내용 및 범위를 근거로 지원실적을 항목별로 구분1. : 2※
하여 기재
지원내용 지원항목별로 기술지원 상황을 비교하여 기재2. : 前 後ㆍ

- 5 -
기술지원 성과 및 효과기술지원 성과 및 효과기술지원 성과 및 효과기술지원 성과 및 효과4.4.4.4.
해당기술 적용제품해당기술 적용제품해당기술 적용제품해당기술 적용제품1)1)1)1)
적용제품명O : ALL-IGBT Type UPS
모 델 명O : Ngen 3000i
품질 및 가격품질 및 가격품질 및 가격품질 및 가격2)2)2)2)
구 분 경쟁 제품해당기술 적용제품
비 고지원전 지원후
경쟁제품 대비 품질이화전기
ETUS
전압 THD
이하5%
전압 THD
이하3%디지털 제품기준
경쟁제품 대비 가격이화전기
ETUS100% 95% 디지털제품기준
객관화 된 근거로 작성DATA※
원가절감 효과원가절감 효과원가절감 효과원가절감 효과3)3)3)3)
구 분 절 감 금 액 비 고
원부자재 절갑 백만원 년100 / ( 25 %) 대당
인건비 절감 백만원 년100 / ( 50 %) 대당
계 백만원 년200 / ( 33 %) 대당
공정개선 및 품질향상 등으로 인한 절감효과 반영※
적용제품 시장전망 매출성과적용제품 시장전망 매출성과적용제품 시장전망 매출성과적용제품 시장전망 매출성과4) ( )4) ( )4) ( )4) ( )
구 분 당해연도 매출 차년도 예상매출전년대비
증가비율비고
내 수 백만원 년2,000 / 백만원 년4,000 / 200%
수 출 - - -
계 백만원 년2,000 / 백만원 년4,000 / 200%
참고 적용제품 수요수출국) 1. :
작성당시 환율기준2.

- 6 -
수입대체효과수입대체효과수입대체효과수입대체효과5)5)5)5)
모델명 당해연도 수입액 차년도수입액 수입대체금액 비고
천달러 년/ 천달러 년/ 천달러 년/
천달러 년/ 천달러 년/ 천달러 년/
계 천달러 년/ 천달러 년/ 천달러 년/
해당기술의 기술력 향상 효과해당기술의 기술력 향상 효과해당기술의 기술력 향상 효과해당기술의 기술력 향상 효과6)6)6)6)
디지털제어용 제품에 적용UPS
아날로그제어기를 디지털제어기로 대체→
구축을 통한 매출 증대효과 기대Full Digital Control system→
기술적 파급효과기술적 파급효과기술적 파급효과기술적 파급효과7)7)7)7)
개발을 통한 원가 절감 및 제품 경쟁력배가Full Digital Controller
핵심 요서 디지털 제어 알고리즘 획득
적용기술 인증 지적재산권 획득여부적용기술 인증 지적재산권 획득여부적용기술 인증 지적재산권 획득여부적용기술 인증 지적재산권 획득여부5. ,5. ,5. ,5. ,
규격 인증획득규격 인증획득규격 인증획득규격 인증획득1) ,1) ,1) ,1) ,
인증명 품목 인증번호 승인기관 인증일자
지적재산권지적재산권지적재산권지적재산권2)2)2)2)
종
류명칭 번호
발명자
고안자( )권리자 실시권자
비고
등록 출원( , )
특허
비선형 부하에
연결되는 무정전
전원 공급장치의
출력필터
10-20006-
0047426민병덕 한국전기연구원 주 맥스컴( ) 출원

- 7 -
세부지원실적세부지원실적세부지원실적세부지원실적6.6.6.6.
항 목지원
건수지 원 성 과
기술정보제공 건2 알고리즘관련 자료 제공
시제품제작 건2 시험용 및 비선형부하 시작품 제작UPS
양산화개발 건
공정개선 건
품질향상 건
시험분석 건2 알고리즘 관련 특성 시험
수출 및 해외바이어발굴 건
교육훈련 건
기술마케팅 경영자문/ 건
정책자금알선 건
논문게제 및 학술발표 건
사업관리시 템TM
지원실적업로드 회수건
지원기업 방문회수 건4 시작품 제작 및 알고리즘개발 관련 업무협의
기타 건
상기 세부지원실적에 대한 세부내용 첨부※
종합의견종합의견종합의견종합의견7.7.7.7.
기존의 알고리즘의 특성을 파악하고 문제점 파악을 통한 보다 향상된 알고리즘을 제안
하며 개발된 알고리즘을 구현할 제어보드를 설계 제작하고 시험을 통하여 개발된 UPSㆍ
의 성능을 시험하였다 출력 고조파 제거를 위한 제어 알고리즘 및 구현을 위한 제어보.
드 설계 제작에 대한 기술적인 사항들을 요청기업의 담당 연구원 및 직원에게 기술을ㆍ
전수하고 기술 개발 중 도출된 모든 회로나 제어 알고리즘 등은 회로도와 프로그램 리
스트 등을 통하여 일괄 전수하였다.

- 8 -
연구과제 세부과제 성과연구과제 세부과제 성과연구과제 세부과제 성과연구과제 세부과제 성과( )( )( )( )
과학기술 연구개발 성과과학기술 연구개발 성과과학기술 연구개발 성과과학기술 연구개발 성과1.1.1.1.
논문게재 성과논문게재 성과논문게재 성과논문게재 성과
사업화 성과사업화 성과사업화 성과사업화 성과2.2.2.2.
특허 성과특허 성과특허 성과특허 성과
출원된 특허의 경우출원된 특허의 경우출원된 특허의 경우출원된 특허의 경우OOOO
세부사항
(9)
출원년도
(10)
특허명
(11)
출원인
(12)
출원국
(13)
등록번호
2006
비선형 부하에
연결되는 무정전
전원 공급장치의
출력필터
한국전기연구원 대한민국 10-2006-0047426
등록된 특허의 경우등록된 특허의 경우등록된 특허의 경우등록된 특허의 경우OOOO
사업화 현황사업화 현황사업화 현황사업화 현황

- 9 -
고용창출 효과고용창출 효과고용창출 효과고용창출 효과
세부지원실적 증빙 내용세부지원실적 증빙 내용세부지원실적 증빙 내용세부지원실적 증빙 내용
지원기업 현장방문 건지원기업 현장방문 건지원기업 현장방문 건지원기업 현장방문 건1. : 31. : 31. : 31. : 3
NO.NO.NO.NO. 일자일자일자일자 구체적 내용구체적 내용구체적 내용구체적 내용 증빙유무증빙유무증빙유무증빙유무
1 2006/10/03 시작품 및 부하 제작 관련 회의
2 2006/02/09 알고리즘 중간 점검회의
3 2006/03/20 시험 결과 분석 및 알고리즘 개선 관련 실무 협의
4 2006/04/11 시험결과분석 및 과제진행 보고회
기술정보제공 건기술정보제공 건기술정보제공 건기술정보제공 건2. : 22. : 22. : 22. : 2
NO.NO.NO.NO. 일자일자일자일자 구체적 내용구체적 내용구체적 내용구체적 내용 증빙유무증빙유무증빙유무증빙유무
1 2005/07/21 고조파분석 관련 논문 논문지IEEE
2 2006/03/24 디지털제어 관련 논문 논문지PESC
시제품제작 건시제품제작 건시제품제작 건시제품제작 건3. : 23. : 23. : 23. : 2
NO.NO.NO.NO. 일자일자일자일자 구체적 내용구체적 내용구체적 내용구체적 내용 증빙유무증빙유무증빙유무증빙유무
1 2006/12/09 단상 시험용 제작UPS
2 2006/2/17 단상 시험용 비선형 부하 제작

- 10 -
시험 분석 건시험 분석 건시험 분석 건시험 분석 건4. : 24. : 24. : 24. : 2
NO.NO.NO.NO. 일자일자일자일자 구체적 내용구체적 내용구체적 내용구체적 내용 증빙유무증빙유무증빙유무증빙유무
1 2006/03/06 단상 출력 고조파 특성시험UPS 보고서 시험결과
2 2006/04/07 상 고조파 특성 시험3 UPS 보고서 시험결과
3
4
5
기술지원실적 업로드 건기술지원실적 업로드 건기술지원실적 업로드 건기술지원실적 업로드 건5. :5. :5. :5. :
NO.NO.NO.NO. 일자일자일자일자 구체적 내용구체적 내용구체적 내용구체적 내용 증빙유무증빙유무증빙유무증빙유무

- 11 -
목 차목 차목 차목 차
제 장 사업의 개요제 장 사업의 개요제 장 사업의 개요제 장 사업의 개요1111
제 절 기술지원 필요성제 절 기술지원 필요성제 절 기술지원 필요성제 절 기술지원 필요성1111
제 절 기술지원 목표제 절 기술지원 목표제 절 기술지원 목표제 절 기술지원 목표2222
제 절 기술지원 내용제 절 기술지원 내용제 절 기술지원 내용제 절 기술지원 내용3333
제 장 국내외 기술현황제 장 국내외 기술현황제 장 국내외 기술현황제 장 국내외 기술현황2222
제 장 기술지원 수행 내용 및 결과제 장 기술지원 수행 내용 및 결과제 장 기술지원 수행 내용 및 결과제 장 기술지원 수행 내용 및 결과3333
제 절 기술지원 수행제 절 기술지원 수행제 절 기술지원 수행제 절 기술지원 수행1111
제 절 기술지원 성과제 절 기술지원 성과제 절 기술지원 성과제 절 기술지원 성과2222
제 장 목표달성도 및 관련분야에의 기여도제 장 목표달성도 및 관련분야에의 기여도제 장 목표달성도 및 관련분야에의 기여도제 장 목표달성도 및 관련분야에의 기여도4444
제 장 기술지원결과의 활용계획제 장 기술지원결과의 활용계획제 장 기술지원결과의 활용계획제 장 기술지원결과의 활용계획5555
제 장 참고 문헌제 장 참고 문헌제 장 참고 문헌제 장 참고 문헌6666
부 록부 록부 록부 록
기술지원일지기술지원일지기술지원일지기술지원일지

- 12 -
제 장 사업의 개요제 장 사업의 개요제 장 사업의 개요제 장 사업의 개요1111
국내 시장의 환경은 예전과는 판이하게 변하였다 외국기업들의 저가정책 및UPS .
앞선 기술을 무기로 진출하여 소규모업체들이 견딜 시장이 많이 줄어들었으며 중견
기업들의 생존에도 많은 어려움이 발생하게 되었다 특히 대만업체들의 약진이 돋.
보이는 상황이다 국내업체의 기술은 아날로그시절에 선진기술을 보고 모방한. UPS
기술을 기반으로 하고 있어 디지털 제어기로의 전환이 쉽지 않은 현실이었다 따라.
서 보다 나은 기능의 제품을 보다 저렴한 가격으로 공급하면서 국내업체로써의 장
점인 신속한 능력을 보유한다면 시장에서 생존할 수 있는 가능성은 더욱 높다AS
고 하겠다.
제 절 기술지원 필요성제 절 기술지원 필요성제 절 기술지원 필요성제 절 기술지원 필요성1111
세계적인 기술은 마이크로프로세서를 이용한 제어가 일반화 된지 오래되며 고UPS
조파제거 및 제어의 모든 기능이 디지털화 되어 있다 그러나 국내 중소기업의 기.
술 인력 구조상 디저털제어의 도입율은 의외로 낮은게 현실이다 본 기술지원 업무.
와 관련하여 한국 전기연구원이 보유하고 있는 기술을 지원기업에 이전하여 중소기
업의 기술 수준을 증대시킬 뿐만 아니라 국내시장에 고부가가치성 신제품 출시를
앞당겨 수입대체 효과를 극대화 시키고자 하며 더 나아가 수출 경쟁력을 갖춘 제품
개발에 박차를 가하고자 한다.
제 절 기술지원 목표제 절 기술지원 목표제 절 기술지원 목표제 절 기술지원 목표2222
에서 중요한 출력전압 고조파 제거 관한 마이크로프로세서 기반의 알고리즘을UPS P
조사 연구하여 알고리즘을 구현할 제어보드를 설계 제작하고 시험을 통하여 개발ㆍ
된 의 성능을 시험한다 출력 고조파 제거를 위한 제어 알고리즘 및 구현을 위UPS .
한 제어보드 설계 제작에 대한 기술적인 사항들을 요청기업의 담당 연구원 및 직ㆍ
원에게 교육 등을 통하여 기술을 전수하고 기술 개발 중 도출된 모든 회로나 제어
알고리즘 등은 회로도와 프로그램 리스트 등을 통하여 일괄 전수하여 지원한다.
- 13 -
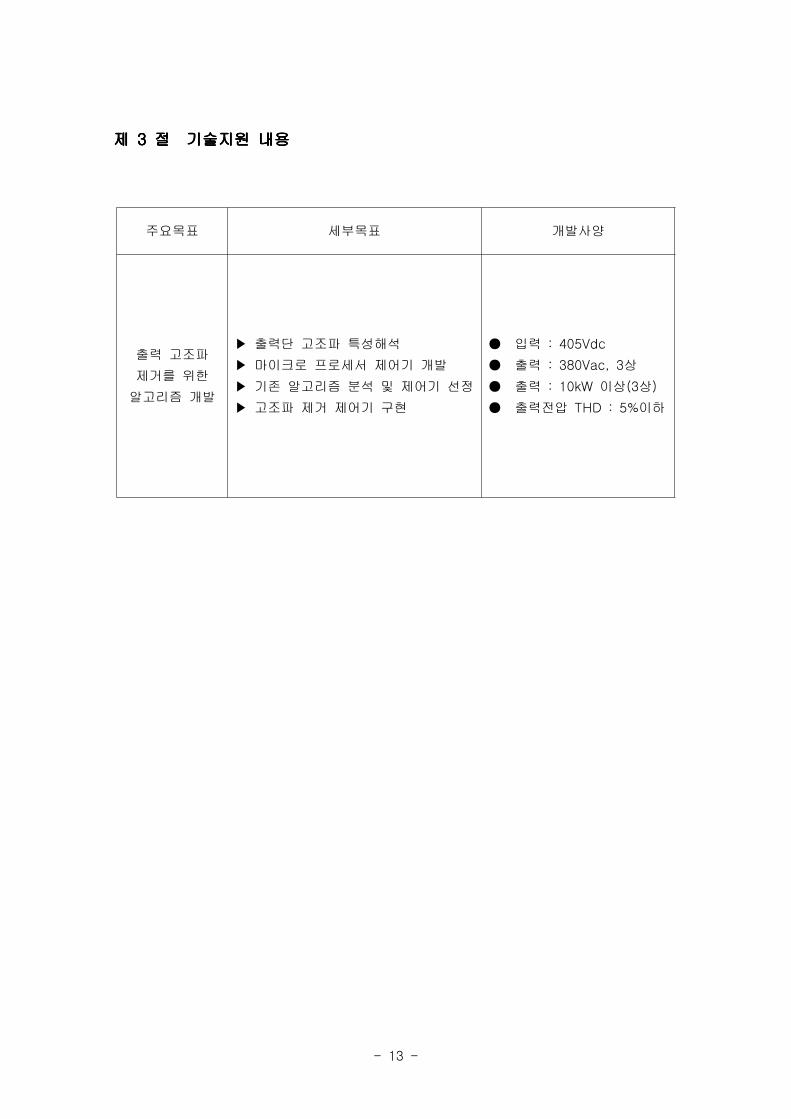
제 절 기술지원 내용제 절 기술지원 내용제 절 기술지원 내용제 절 기술지원 내용3333
주요목표 세부목표 개발사양
출력 고조파
제거를 위한
알고리즘 개발
출력단 고조파 특성해석
마이크로 프로세서 제어기 개발
기존 알고리즘 분석 및 제어기 선정
고조파 제거 제어기 구현
입력 : 405Vdc
출력 상: 380Vac, 3
출력 이상 상: 10kW (3 )
출력전압 이하THD : 5%

- 14 -
제 장 국내외 기술현황제 장 국내외 기술현황제 장 국내외 기술현황제 장 국내외 기술현황2222
무정전 전원장치는 오래전부터 사용된 전력변환장치이다 국내에서도 수많은 업체.
들이 개발하고 영업활동을 하였다 기술 및 민감한 전원의 요구사항이 많아짐에. IT
따라 의 시장은 예전에 비해 많이 규모가 증가 하였다 국내 회사로는 개사UPS . 3
정도가 대부분의 시장을 장악하고 있다고 판단되며 외국기업도 많이 진출해 있다.
사업은 시장규모가 중소기업업종이라고 할 수 있으며 일부 대기업도 영업은 계UPS
속하고 있으나 개발부분은 철수한 상태이다 따라서 중소기업의 규모의 한계에 따.
라 기술적인 발전은 느린게 국내 업계의 현실이다 최근에는 대만기업들의 저UPS .
가 진출에 의해 국내기업도 가격 경쟁력면에서 고전을 면치 못하고 있는 실정이다.
따라서 국내업체들이 외국기업에 대해 경쟁력을 갖기 위해서 기술개발을 통한 제품
의 성능을 업그래이드하는 것이 절실히 요구되는 시점이다 업계에서 최근의. UPS
화두는 디지털화 된 제어기를 이용한 비선형 부하에 의한 출력고조파 제거를 위한
기술과 용량증대 및 전원의 안정성을 더욱 증대시키기 위한 병렬운전에wireless
대한 기술 확보라 하겠다 이러한 기술은 학문적으로는 오랫동안 연구되어 왔고 외.
국제품에도 적용이 되었으며 국내에 시판되는 제품은 대부분 아날로그방식으로 구
현되어 있다.
방식으로 구현함으로 인해 원가의 절감은 물론 의 용이성에서 많은Full Digital AS
장점을 가지고 있다 그러나 아날로그방식과는 확연하게 제어방식이 다름으로 인해.
업체에서는 기술적 어려움을 격고 있는 것이 국내업체의 현실이다 본 과제에UPS .
서는 이러한 업계의 어려움을 극복하기 위해 외산과 경쟁할 수 있는 성능을 가지면
서 제어기를 적용함으로써 가격경쟁력도 확보할 수 있는 디지털 제어Full digital
알고리즘 개발에 주력한다.

- 15 -
제 장 기술지원 수행 내용 및 결과제 장 기술지원 수행 내용 및 결과제 장 기술지원 수행 내용 및 결과제 장 기술지원 수행 내용 및 결과3333
제 절 기술지원 수행제 절 기술지원 수행제 절 기술지원 수행제 절 기술지원 수행1111
무정전 전원장치의 제어방법에 대한 고찰무정전 전원장치의 제어방법에 대한 고찰무정전 전원장치의 제어방법에 대한 고찰무정전 전원장치의 제어방법에 대한 고찰1.1.1.1.
무정전 전원장치 시스템은 계통에 이상이 있을 때 비상전원을 공급한다 최근(UPS) .
에는 computer data processing system, life care medial system, alarm system,
시스템 같은 민감한 부하에 용 보조전원으로써 널리 사용되고safty lighting backup
있다 고효율 시스템이 널리 사용됨예 따라 앞서 언급한 시. static power converter
스템을 포함하여 많은 전자적 부하들이 비선형적 특성을 가지고 있으므로 인해 많
은 고조파를 발생시키고 있다 따라서 의 인버터 출력에 질 높은 정현파를 유. UPS
지하기 위해서는 부가적인 고조파 필터링을 위한 기술이 적용되어야만 한다. UPS
시스템에서 전체성능은 직류전원을 낮은 갖는 교THD(Total Harmonics Distortion)
류시스템을 변화시켜주는 로 구성된 시스템의 성능에 전적으로static inverter-filter
달려있다 시스템의 성능은 와 같은 성. UPS voltage regulation, THD steady state
능과 급변하는 부하에 대한 응답성과 같은 성능으로 대표된다 이런 성능transient .
을 확보하기 위해 비선형 부하에서 전압왜곡을 제거하고 빠른 동적 성능을 얻을 수
있는 이나 같은 다양한 제어 방법이 소개되어deadbeat control cascade control
있다 참고문헌 에 소개되어진 은 전압센싱만으로 구성가능한. [1] deadbeat control
선형부하에서는 만족할 만한 성능을 얻을 수 있으나 논문에서 언급했듯이 비선형
부하에서는 고성능을 얻을 수 없다는 단점을 가지고 있다 참고문헌 에 소개된. [2]
방법은 앞서 언급한 방법보다는 비선형 부하에서 나은 성능을 보이나 출력전압 부,
하전류 필터 인덕터 전류 등 요구되는 센서의 종류가 많다는 것이 단점이다 참고, .
문헌 에 소개된 방법은 에 대해서 빠른 응답[4] cascade control load disturbance
성능을 발휘하나 이 또한 여러 개의 전류 및 전압을 센싱 해야하는 문제점은 여전
히 가지고 있다.
본 과제에서는 대표적인 제어방법인 고조파 분석에 의한 출력고조파 제거 알고리즘
을 구현하는 것을 목표로 한다 추가적으로 고조파 방식 보다 구현이 간단한 방식.
에 대해서도 조사하여 가능성을 검토해보도록 한다.

- 16 -
가 고조파 분석법에 의한 출력전압 왜곡 제거방법가 고조파 분석법에 의한 출력전압 왜곡 제거방법가 고조파 분석법에 의한 출력전압 왜곡 제거방법가 고조파 분석법에 의한 출력전압 왜곡 제거방법....
기존에서는 대부분의 시스템은 아날로그 제어기로 구현되었다 최근 프로UPS . DSP
세서가 대중화 되면서 디지털 제어기로 전환되고 있으나 아직 국내회사에서는 완전
한 디지털 제어기로 전환되지 않은 것이 현실이다 디지털 제어기는 아날로그제어.
기에 비해 여러 가지 회로의 노화에 의한 영향이나 제어 변수의 수정 시스템의 변,
경 등에 유연하게 대처할 수 잇다는 장점을 가지고 있다 또한 시스템의 모니터링.
및 통신 기능 운전 데이터의 저장 미 관리가 아주 용이하다 시스템의 대부분, . UPS
의 전자적 부하들은 비선형이므로 고조파 전류를 발생시키고 있으므로 이의 영향을
최소화 하기 위한 필터 시스템이 필요하게 된다 특정 고조파를 제억하기 위한 고.
조파 필터를 이용하여 이를 제거하기도 한다 그러나 현재 나와 있는 고성능. DSP
를 이용하면 실시간을 고조파를 제거할 수 있는 알고리즘을 소프트웨어로 구현할
수 있다 프로세서를 이용하여 소프트웨어로 제어되는 알고리즘을 구현할 경. DSP
우 덩치가 큰 수동형 고조파 필터를 사용하지 않고도 간단히 비선형 부하에서도 정
현파 전압을 공급할 수가 있다.
본 과제에서 구현 목표로 하는 고조파분석에 의한 전압왜곡 제거 알고리즘에 대해
서 알아보도록 하겠다.
고조파제거 방법고조파제거 방법고조파제거 방법고조파제거 방법1) 11) 11) 11) 1
그림 상 의 구성도그림 상 의 구성도그림 상 의 구성도그림 상 의 구성도1 3 UPS1 3 UPS1 3 UPS1 3 UPS
- 17 -
이 방법은 참고문헌 에 소개되어 있으며 이를 간단히 요약정리하면 다음과 같다[7] .
vru,vrv,vrw은 모듈레이션 신호로써 모듈의 입력이다SVPWM . vru,vrv,vrw은 중성점에
대하여 인버터 출력전압을 나타낸다 인버터 출력은 모듈레이션 신호와 전력소자.
전압강하분을 이용하여 표시할 수 있다.
여기서 vhu는 전력소자의 전압 강하분을 나타낸다.
상 인버터의 경우 상이 모두 동일한 형태의 필터 구조를 가지기 때문에 한 상의3 3
출력 필터에 대한 단상 인버터의 등가회로에 대한 수식으로 다음과 같이 표현할 수
있다.
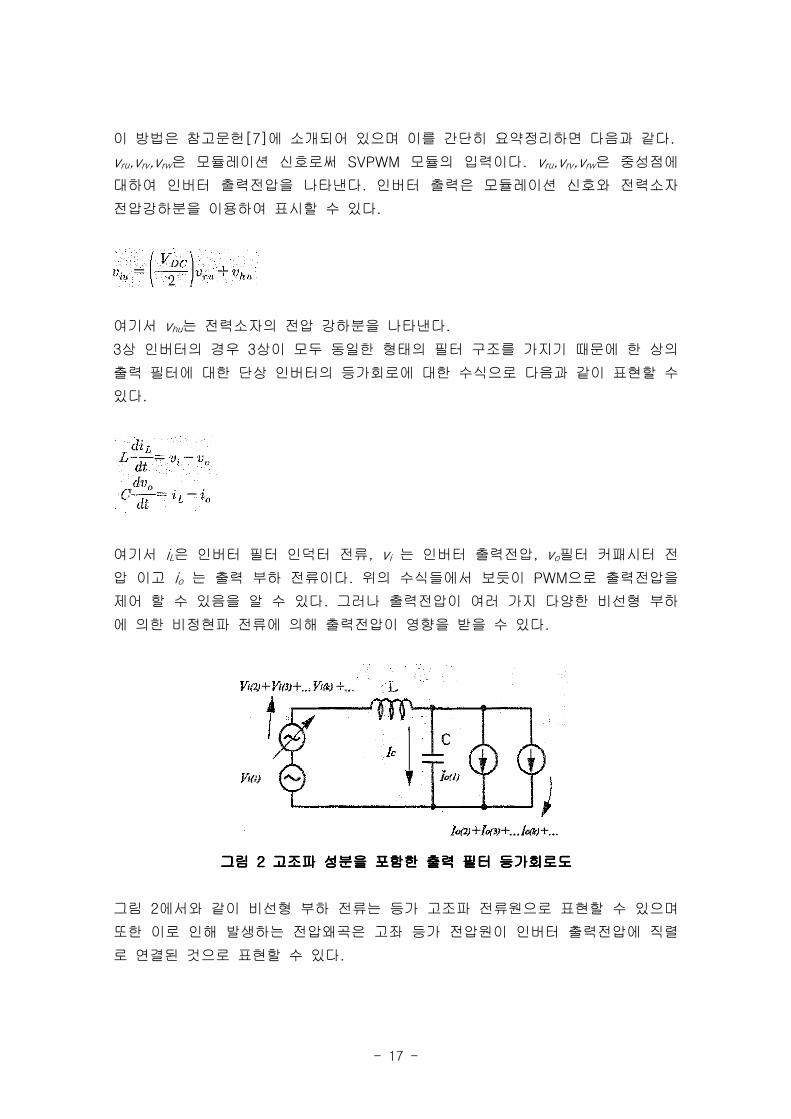
여기서 iL은 인버터 필터 인덕터 전류, vi 는 인버터 출력전압, vo필터 커패시터 전
압 이고 io 는 출력 부하 전류이다 위의 수식들에서 보듯이 으로 출력전압을. PWM
제어 할 수 있음을 알 수 있다 그러나 출력전압이 여러 가지 다양한 비선형 부하.
에 의한 비정현파 전류에 의해 출력전압이 영향을 받을 수 있다.
그림 고조파 성분을 포함한 출력 필터 등가회로도그림 고조파 성분을 포함한 출력 필터 등가회로도그림 고조파 성분을 포함한 출력 필터 등가회로도그림 고조파 성분을 포함한 출력 필터 등가회로도2222
그림 에서와 같이 비선형 부하 전류는 등가 고조파 전류원으로 표현할 수 있으며2
또한 이로 인해 발생하는 전압왜곡은 고좌 등가 전압원이 인버터 출력전압에 직렬
로 연결된 것으로 표현할 수 있다.

- 18 -
여기서 Iok는 번째 부하전류의 고조파 성분k , Vik 는 인버터 전압의 번째 고조파 성k
분이고 Vok는 출력전압의 번째 고조파 성분이다 위 수식에서 보면 번째 출UPS k . k
력전압 고조파 성분은 인버터의 고조파 성분과 부하전류의 고조파 성분의 합으로
구성되어져 있다 만약 두 성분의 크기가 같고 위상이 반대이면 번째 고조파 성. k
분은 상쇄되어 출력에서 사라지게 될 것이다 즉 다음과 같은 전압을 인버터에서.
발생시켜 준다면 출력 고조파 왜곡은 사라지게 된다.
여기서 이다.
그림 은 제안한 알고리즘에 대한 구성도 이다 여기서는 한상에 대한 부분만 상세3 .
히 표현했으며 다른 두 상도 모두 동일한 알고리즘을 적용하여 구할 수 있다 인버.
터 출력전압을 샘플하여 기본파에 대한 를 수행하여 기본파 성분에 대한FFT rms
값을 추출하여 출력 제어기에 입력하여 기본파 성분의 크기를 제어하게 된다 기rms .
본파 제어기는 제어기를 사용하여 제어하게 된다 여기에 각 고조파 전압을 보상PI .
하기 위한 제어기의 출력이 더해져서 최증 제어 신호가 만들어진다 출력전PWM .
류의 고조파 성분에 의한 전압분을 위의 수식에 의해 전류에 의해 발생하는 보상전
압을 계산하여 피드포워드로 보상해 주게 된다 제어기를 통하지 않고 직접 보상하.
기 때문에 전류센서의 에러나 다른 여러 가지 에러 요인에 의해 시스템이 불안해지
는 걸 막기 위해 각 고조파에 대한 제어기를 추가가적으로 더해주게 된다 이 방식.
은 전류에 대한 피드포워드항이 있어 다이나믹 특성이 좀 더 뛰어 날 수 있으나 계
산량은 상당히 부담이 된다고 할 수 있다.

- 19 -
그림 고조파 분석에 의한 전압왜곡 해결을 위한 방식 의 개념도그림 고조파 분석에 의한 전압왜곡 해결을 위한 방식 의 개념도그림 고조파 분석에 의한 전압왜곡 해결을 위한 방식 의 개념도그림 고조파 분석에 의한 전압왜곡 해결을 위한 방식 의 개념도3333 ⅠⅠⅠⅠ
고조파 제거 방법고조파 제거 방법고조파 제거 방법고조파 제거 방법2)2)2)2) ⅡⅡⅡⅡ
그림 는 또하나의 고조파 분석법에 의한 고조파 제거 알고리즘을 보여주고 있다4 .
이 방법의 첫 번째 소개한 방법과 아주 유사하며 의 출력전압을 샘플링하여 근UPS
값과 고조파를 분석하여 제어에 이용하게 된다 값은 출력전압의 크기를[6]. RMS
제어하는 메인 제어기의 피드백 신호로 전달하여 지며 전압 명령치와 비교에 의해
제어기를 통해 제어값을 구하게 된다 고조파 성분은 고조파 성분은 일반적으로PI .
알고리즘 등을 이용하여 구하여 지면 이를DFFT(Digital Fast Fourier Transform)
이용해서 구해진 각 차수의 제거하고자 하는 고조파는 제어기를 통해 나온 제어PI
값을 앞서 제어기 통해 나온 값에서 빼줌으로서 고조파를 제거하는 기능을 하RMS
게 된다.

- 20 -
를 통해서 각상의 및 성분을 추출할 수 있다 상의 차DFFT a,b,c real imaginary . a 5
고조파 성분에 대해서 다음과 같은 함수로 나타낼 수 있다.
여기서 va(n)은 n 시간에 해당하는 출력전압 값이다 이는 다음과 같이 간단하게 표.
현될 수 있다.
여기서 λa5r,λu5i 는 각각 Λa5의 실수부와 허수부를 의미한다 일단 각상에 대해서.
고조파 성분이 구해지면 차 고조파의 크기는 상의 평균에 의해 다음과 같이 구해5 3
진다.
이 방식이 앞서 설명한 방식과 다른 점은 각 차수의 고조파에 대한 제어기가 각상
마다 존재하는 것이 아니고 상의 각 차수의 값을 합성하여 하나의 값으로 만들어3
제어를 행하고 이를 다시 상으로 분리 하는 방법을 사용하므로 인해 제어기의 개3
수를 줄였다는 장점이 있다.

- 21 -
그림 고조파 분석법에 의한 고조파 제거 알고리즘 개념도그림 고조파 분석법에 의한 고조파 제거 알고리즘 개념도그림 고조파 분석법에 의한 고조파 제거 알고리즘 개념도그림 고조파 분석법에 의한 고조파 제거 알고리즘 개념도4444
나 를 이용한나 를 이용한나 를 이용한나 를 이용한. Pole Placement Digital Feedback controller. Pole Placement Digital Feedback controller. Pole Placement Digital Feedback controller. Pole Placement Digital Feedback controller
본 과제에서는 대표적인 제어방법에 대한 연구를 진행하며 디지털 방식에 적합한
방식을 선택하여 제품에 적용하고자 한다 본 방식은 방식을 기초. pole-placement
로 하여 단상 에 적용한 의 설계에 대한 내용이다UPS robust feedback controller
방식을 채용하여 빠른 응답특성을 얻기 위하여 출력전압의[5]. polynomial design
을 이용하여 모든 시스템의 을 원점에 배치한다 부하전feedback closed-loop pole .
류에 의한 전압왜곡을 무시할 정도의 적은 값으로 줄이도록 부하전류의 feedback
제어기 값을 한다 이 방식에서는 부하 전류 값과 필터의 자세한 사양을design . LC
필요로 한다.
단상 의 기본적인 형태는 그림 와 같다 스위칭 주파수는 시스템의 다이나믹UPS 5 .
응답특성이 출력필터 에 의해 결정될 수 있을 만큼 높다고 가정하고 인덕터와LC
커패시터의 직렬저항값은 무시할 수 있을 정도록 작다고 가정한다 그림 의. 5
은 다음과 같이 표현된다continuous-time dynamic model .
- 22 -
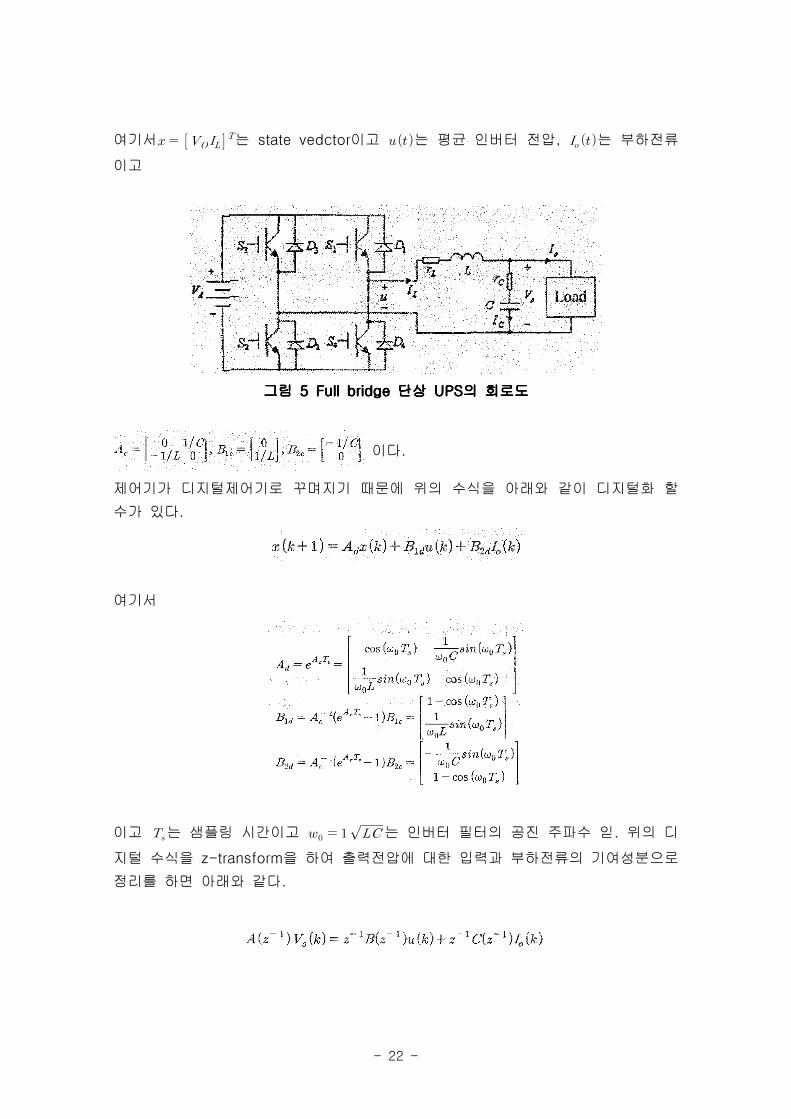
여기서 는 이고state vedctor 는 평균 인버터 전압, 는 부하전류
이고
그림 단상 의 회로도그림 단상 의 회로도그림 단상 의 회로도그림 단상 의 회로도5 Full bridge UPS5 Full bridge UPS5 Full bridge UPS5 Full bridge UPS
이다.
제어기가 디지털제어기로 꾸며지기 때문에 위의 수식을 아래와 같이 디지털화 할
수가 있다.
여기서
이고 는 샘플링 시간이고 는 인버터 필터의 공진 주파수 읻 위의 디.
지털 수식을 을 하여 출력전압에 대한 입력과 부하전류의 기여성분으로z-transform
정리를 하면 아래와 같다.

- 23 -
여기서
이고 은 이다 위의 수식을 이용하여 그림 에 보는 것backward shift operator . 6
과 같이 을 이용하여pole placement technique digital feedback control strategy
를 개발할 수 있다.
그림 의그림 의그림 의그림 의6 control scheme block diagram6 control scheme block diagram6 control scheme block diagram6 control scheme block diagram
여기서 필터커패시터의 전류는 스위칭주파수의 전류 성분을 많이 포함하고 있으므
로 인해 신호로 이용하기에 적절하지 않으므로 부하전류를 이용한다 시feedback .
스템의 는 빠르게 하고 부하전류에 의한 전압 왜곡을 최소로 하dynamic response
는 방향으로 제어기를 설계한다 인버터의 전압제어는 이기 때문에. tracking control
의 성분이 필요하다 따라서 제어기는reference signal feedforward . feedforward
부분과 전류 및 전압의 성분으로 아래와 같이 구성할 수compensation feedback
가 있다.
여기서
는 출력전압의 명령치이
다 제어기의. 차수는 의 차수를 기준으로 정
한다.
- 24 -
위의 수식을 기초로 전압에 대한 단상 인버터 시스템 방정식은 아래closed-loop
와 같이 구해진다.
빠른 특성을 얻기 위해서는 모든 시스템 폴을 원점에 배치하게dynamic response
다항식 을 설계할 필요가 있다 그리고 부하전류에 의한 출력전압의.
왜곡을 최소화하기 위하여 다항식 을 설계하면 원하는 출력특성을 얻을 수
있다.
출력전압과 명령치와의 관계는 위의 수식으로부터 다음과 같이 구할 수 있다.
폐루프 시스템의 응답을 위해deadbeat 가 되도록
을 설계하는 것이 필요하다 그리고 폐루프 시스템의 정상상태에서는.
단위 이득을 가져야 하므로 다음 조건도 만족이 되어야 한다.
따라서 의 파라미터를 설계하기 위한 조건은 아래와 같이 정리될 수
있다.
위의 조건을 적용하면 의 파라미터에 대한 유일한 해를 다음과 같이
구할 수 있다.
- 25 -
다음으로 부하 전류에 대한 명령치와 관계식에서 의 변수를 구하는 방법에
대하여 알아보겠다 위에서. 의 모든 을 원점에 배치하였으므로pole
출력전압과 부하전류에 대한 전달함수는 다음과 같이 표현된다.
여기서 가 이기 때문에 이를 영으로 만들 수 있는second order polynomial
두 변수를 정하는 것은 불가능하다 즉 부하 전류에 의한 영향을 완전히 영으로 만.
들 수는 없으므로 이의 영향을 무시할 수 있을 정도로 적도록 변수를 설계할 수밖
에 없다. 이 항상 의 항을 포함하고 있으므로 이 다항식
을 항상 포함하도록 를 설계하면 변수는 다음과 같이 정해진다.
따라서
부하전류에 대한 왜곡을 최소화시키기 위하여 전달 함수에서 부하전류가 출력전압
에 영향을 미치는 항을 최소화 시켜야만 한다 출력전압과 명령치전압 부하전류의. ,
전달 함수 식에서 명령치와 출력전압 관계항 은 제어기의 추종특
성에 의해 거의 명령치인 와 같게 된다 반면에 부하전류와 출력전압관계 항인.
은 다음과 같이 표현된다.

- 26 -
이 값은 시뮬레이션해보면 샘플링 타임에서 비선형 부하에서 선형부하5kHz 1.5%,
에서 정도만 출력전압에 영향을 미침을 알 수 있다 즉 부하전류에 의한 왜0.13% .
곡이 부하전류의 에 의한 제어로 인해 줄어듦을 알 수 있다 논문에서feedback . w
안된 제어기의 실제 동작을 알아보기 위해 그림 과 같이 을 이용하여 시뮬레7 PSIM
이션을 수행하여 보았다 시뮬레이션에 사용된 변수는 다음과 같다. .
표 시뮬레이션에 사용된 변수표 시뮬레이션에 사용된 변수표 시뮬레이션에 사용된 변수표 시뮬레이션에 사용된 변수1111
Filter Inductance L 0.714mH
Filter Capacitance C 121.2
Switching Frequency 10kHz
DC Link Voltage 400VDC
Output Voltage 220VRMS
Inductor resistance 0.195Ω
Cpacitor resistance 0.07Ω
비선형 부하에 사용된 변수는 다음 표와 같다.
표 비선형 부하표 비선형 부하표 비선형 부하표 비선형 부하2222
직렬저항 0.3872Ω
다이오우드 출력 커패시터 6726
다이오우드 저항 부하 21.85Ω

- 27 -
그림 이용한 디지털 제어기의 구현그림 이용한 디지털 제어기의 구현그림 이용한 디지털 제어기의 구현그림 이용한 디지털 제어기의 구현7 PSIM7 PSIM7 PSIM7 PSIM
그림 는 고조파 보상 제어기가 없이 기준 명령 전압을 가지고 했을 때 출29 PWM
력 전압 및 전류 파형이다 다이오우드 브릿지 비선형 부하에서 전형적인 전압 전.
류 왜곡 파형을 볼 수가 있다.
그림 제어가 없을 때 비선형부하에서의 출력전압 및 전류파형그림 제어가 없을 때 비선형부하에서의 출력전압 및 전류파형그림 제어가 없을 때 비선형부하에서의 출력전압 및 전류파형그림 제어가 없을 때 비선형부하에서의 출력전압 및 전류파형8888
- 28 -
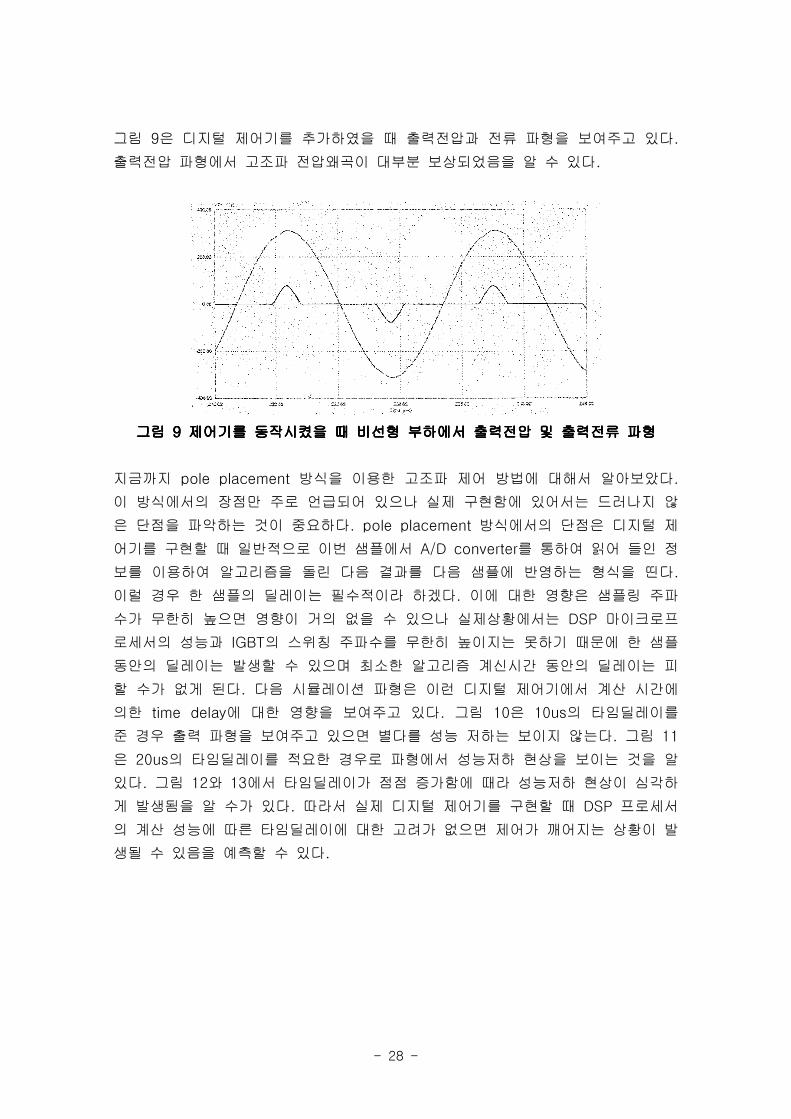
그림 은 디지털 제어기를 추가하였을 때 출력전압과 전류 파형을 보여주고 있다9 .
출력전압 파형에서 고조파 전압왜곡이 대부분 보상되었음을 알 수 있다.
그림 제어기를 동작시켰을 때 비선형 부하에서 출력전압 및 출력전류 파형그림 제어기를 동작시켰을 때 비선형 부하에서 출력전압 및 출력전류 파형그림 제어기를 동작시켰을 때 비선형 부하에서 출력전압 및 출력전류 파형그림 제어기를 동작시켰을 때 비선형 부하에서 출력전압 및 출력전류 파형9999
지금까지 방식을 이용한 고조파 제어 방법에 대해서 알아보았다pole placement .
이 방식에서의 장점만 주로 언급되어 있으나 실제 구현함에 있어서는 드러나지 않
은 단점을 파악하는 것이 중요하다 방식에서의 단점은 디지털 제. pole placement
어기를 구현할 때 일반적으로 이번 샘플에서 를 통하여 읽어 들인 정A/D converter
보를 이용하여 알고리즘을 돌린 다음 결과를 다음 샘플에 반영하는 형식을 띤다.
이럴 경우 한 샘플의 딜레이는 필수적이라 하겠다 이에 대한 영향은 샘플링 주파.
수가 무한히 높으면 영향이 거의 없을 수 있으나 실제상황에서는 마이크로프DSP
로세서의 성능과 의 스위칭 주파수를 무한히 높이지는 못하기 때문에 한 샘플IGBT
동안의 딜레이는 발생할 수 있으며 최소한 알고리즘 계신시간 동안의 딜레이는 피
할 수가 없게 된다 다음 시뮬레이션 파형은 이런 디지털 제어기에서 계산 시간에.
의한 에 대한 영향을 보여주고 있다 그림 은 의 타임딜레이를time delay . 10 10us
준 경우 출력 파형을 보여주고 있으면 별다를 성능 저하는 보이지 않는다 그림. 11
은 의 타임딜레이를 적요한 경우로 파형에서 성능저하 현상을 보이는 것을 알20us
있다 그림 와 에서 타임딜레이가 점점 증가함에 때라 성능저하 현상이 심각하. 12 13
게 발생됨을 알 수가 있다 따라서 실제 디지털 제어기를 구현할 때 프로세서. DSP
의 계산 성능에 따른 타임딜레이에 대한 고려가 없으면 제어가 깨어지는 상황이 발
생될 수 있음을 예측할 수 있다.

- 29 -
그림 가 있을 때 출련전압 및 전류 파형그림 가 있을 때 출련전압 및 전류 파형그림 가 있을 때 출련전압 및 전류 파형그림 가 있을 때 출련전압 및 전류 파형10 10 time delay10 10 time delay10 10 time delay10 10 time delay
그림 가 있을 대 출력전압 및 전류 파형그림 가 있을 대 출력전압 및 전류 파형그림 가 있을 대 출력전압 및 전류 파형그림 가 있을 대 출력전압 및 전류 파형11 20 time delay11 20 time delay11 20 time delay11 20 time delay

- 30 -
그림 가 있을 때 출력전압 및 전류 파형그림 가 있을 때 출력전압 및 전류 파형그림 가 있을 때 출력전압 및 전류 파형그림 가 있을 때 출력전압 및 전류 파형12 30 time delay12 30 time delay12 30 time delay12 30 time delay
그림 가 있을 대 출력전압 및 전류 파형그림 가 있을 대 출력전압 및 전류 파형그림 가 있을 대 출력전압 및 전류 파형그림 가 있을 대 출력전압 및 전류 파형13 40 time delay13 40 time delay13 40 time delay13 40 time delay

- 31 -
비선형 부하에서의 출력고조파 왜곡을 최소하 하기 위한 필터 설계 방법비선형 부하에서의 출력고조파 왜곡을 최소하 하기 위한 필터 설계 방법비선형 부하에서의 출력고조파 왜곡을 최소하 하기 위한 필터 설계 방법비선형 부하에서의 출력고조파 왜곡을 최소하 하기 위한 필터 설계 방법2.2.2.2.
그림 회로와 비선형 부하그림 회로와 비선형 부하그림 회로와 비선형 부하그림 회로와 비선형 부하14 UPS14 UPS14 UPS14 UPS
그림 은 단상 와 전압왜곡을 일으키는 비선형 부하인 다이오우드 정류기 부하1 UPS
를 보여주고 있다.
그림 전형적인 비선형 부하의 전류 파형그림 전형적인 비선형 부하의 전류 파형그림 전형적인 비선형 부하의 전류 파형그림 전형적인 비선형 부하의 전류 파형15151515
그림 는 그림 과 같은 비선형 부하에 의해 발생되는 전류의 파형을 보여주고 있2 1
다 이러한 비선형 전류가 의 출력필터를 통하여 흐름으로 인해 인턱더에 비선. UPS
형적인 전압강하가 존재하게 되고 이로 인해 인버터에서 발생시키려고 하는 정현파
와 다른 일그러진 전압이 의 출력단 전압으로 나타나게 된다UPS .

- 32 -
그림 출력단 등가회로그림 출력단 등가회로그림 출력단 등가회로그림 출력단 등가회로16161616
그림 은 출력단에서 고조파 전류 그리고 출력전압을 포함한 등가회로를 보여3 UPS
주고 있다 출력 커패시터에서 전류전압 관계식은 다음과 같다. .
즉 출력전압이 정현파이기 위해서는 커패시터에 흐르는 전류가 정현파이어야 함을
알 수 있다 반대의 경우도 성립한다 인버터에서 발생시키는 전압은 인덕터 전압강. .
하분과 커패시터 전압의 합으로 나타난다 그리고 인덕터에 걸리는 전압은 인덕터.
에 흐르는 전류의 미분값과 동일하며 인덕터 전류가 커패시터전류와 부하전류의 합
으로 표현되므로 이 둘의 각각 미분임을 알 수 있다.
커패서터 전류 가 정현파이기 위해서는 부하전류 N에 의한 전압 강하분이 더해
진 전압이 인버터 전압 의 명령치가 되어 이러한 전압이 발생되면 고조파 전
류를 인버터에서 공급해주어 출력된 커패시터에서 고조파 전류가 흘러가지 않으므
로 인해 출력커패시터에 정현전류만 흐르게 되어 출력전압의 왜곡이 일어나지 않게
된다 기존의 고조파 분석 방법에서는 이러한 원리를 이용하여 부항전류의 고조파.
를 분석하고 이러한 전류를 인버터에서 공급하기 위한 전압을 계산하여 정현전압에
고조파 전압을 실어 주어 출력에서 고조파를 제거하는 방법을 사용한다 앞에서 언.
급한 바와 같이 이러한 방법은 대단히 많은 계산과 메모리 그리고 마이크로프로세
서의 빠른 계산 능력을 요구하는 단점이 있다.

- 33 -
는 신호의 고조파 성분의 양을 측정하는 것으로 일HTD(Tota; Harmonic Distortion)
반적으로 사용되고 있다 무정전 전원장치에서는 출력전압의 고조파가 이내로. 5%
제한되어지도록 규정 되어져 있다 일반적으로 고조파는 홀수 고조파만 존재하게.
되므로 를 구하는 수식은 아래와 같다THD .
:n차고조파성분
기본파성분:
고조파에 의한 인덕터에서 전압강하 값은 아래 식과 같다 여기서. n은 고조파의 차
수를 나타내고 은 기본주파수의 각 주파수값이며 L은 인덕터 값이며 In은 n 고ck
조파의 전류 값을 나타낸다.
비선형적인 부하에 의한 고조파 전류에 의한 전압 강하분이 원하는 값 이하로THD
될 만큼 작다면 전체적인 값을 만족 시킬 수가 있게 된다 위의 인덕터 전압THD .
강하분에 대한 수식을 를 구하는 수식에 대입하여 전개하면 다음과 같다THD .
필터설계를 위한 필터 인덕터를 구하기 위해서는 위의 수식에서 인덕턴스 L 값을
구하는 수식을 유도하면 된다 위의 수식을 인덕턴스. L에 대하여 정리하면 다음과
같다.

- 34 -
즉 위의 수식에 고조파 전류성분을 대입하여 구한 값으로 필터를 설계하면 비선형,
부하에 의한 고조파 전류로 인해 발생되는 전압의 인덕터 전압 강하분이 일정 값
이하가 되므로 원하는 를 얻을 수 있게 된다 인덕터 값이 정해졌으므로 나머THD .
지 필터의 한 구성 요소인 커패서터의 값을 설정해야 하는데 이는 다음과 같은 수
식으로 구할 수가 있다 필터의 는 다음과 같은 수식으로 표현된. cutoff frequency
다.
여기서 cutoff frequency, 는 스위칭 주파수의 로 설정되므로 다음과 같은1/10
수식으로부터 필터커패시터 값을 구할 수 있다.
여기서 는 스위칭 주파수 이다.
설계 예설계 예설계 예설계 예2.2.2.2.
아래 그림 와 같은 비선현 부하에 대해서 정현파전압이 인가될 경우 전류파형은17
다음과 같다.
비선형 부하에 의한 전류파형을 주파수 분석을 하면 아래 표와 같은 성분 값을 얻
을 수 있다.

- 35 -
비선형 부하에 의한 전류의 고조파 성분by 3
인버터에 위의 비선형 부하를 인가할 경우 전압 전류파형은 그림 와 같다PWM / 18 .
전압의 왜곡이 심각함을 알 수 있다 여기서 사용된 필터 정수는 다음과 같으며 일.
반적으로 사용되는 필터정수 값이다.
이 때의 값은 이다THD 15.24% .
다음과 같은 시스템 변수에 대해서 필터를 제안한 방법에 의해 설계하면 다음과 같
다.
수식에 의해서 인덕터 값과 커패시터 값을 구하면 다음과 같다

- 36 -
설계된 필터를 이용하여 시뮬레이션을 한 출력 전압 및 출력전류의 파형은 그림 19
과 같으며 보는 바와 같이 전압 왜곡이 거의 없는 것을 알 수 있다 이때의. THD
값은 이다4.9% .
그림 일반적 필터에서 의한 출력전류 및 전압 파형그림 일반적 필터에서 의한 출력전류 및 전압 파형그림 일반적 필터에서 의한 출력전류 및 전압 파형그림 일반적 필터에서 의한 출력전류 및 전압 파형18181818
위 전류 아래 전압위 전류 아래 전압위 전류 아래 전압위 전류 아래 전압( : , : )( : , : )( : , : )( : , : )

- 37 -
그림 새로운 방식으로 필터를 설계한 경우그림 새로운 방식으로 필터를 설계한 경우그림 새로운 방식으로 필터를 설계한 경우그림 새로운 방식으로 필터를 설계한 경우19191919
전류 전압파형 위 전류 아래 전압전류 전압파형 위 전류 아래 전압전류 전압파형 위 전류 아래 전압전류 전압파형 위 전류 아래 전압/ ( : , : )/ ( : , : )/ ( : , : )/ ( : , : )

- 38 -
출력 전압의 고조파왜곡에 대한 필터 인덕터의 영향을 살펴보기 위해 실험을 행하
였다 앞서 설명한 방식으로 필터를 설계하여 여러 가지 필터 값에 따른 출력파형.
을 비교하였다 그림 은 의 인턱터 필터를 적요했을 때의 비선형 부하에서. 20 1.5mH
출력전압을 보여주고 있다 전압의 왜곡이 상당함을 알 수 있다 다이오우드 비선형. .
부하에서 나타나는 특징인 전압파형의 꼭지부분이 평형해지는 특징을 관찰 할 수가
있다 이 때의 값은 이다. THD 9.8% .
그림그림그림그림 20202020 비선형 다이오우드 정류기 부하에서 필터 인덕터가 일1.5mH
때 출력전압파형 파형 출력전압파형 다이오우드 정류기(4:PWM , 3: , 2:
전류파형)
그림 은 앞서보다 반값의 인덕터를 사용했을 때 출력 파형이다 인덕턴스값이 줄21 .
어듦에 따라 인덕터에 걸리는 전아브이 양이 기준 전압에 비해 적어지기 때문에 출
력에 나타나는 전압 왜곡이 줄어 듦을 볼 수 있다 이 때의 전압 값은 로. THD 5.4%
측정 되었다.
- 39 -
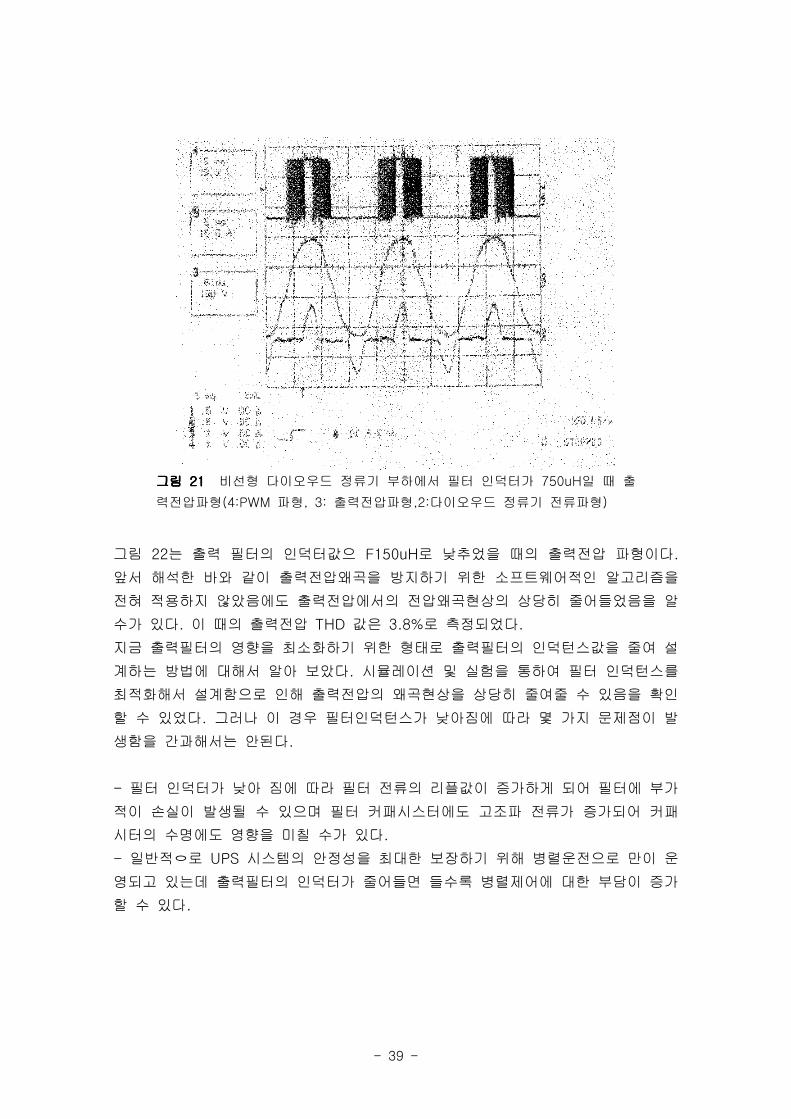
그림그림그림그림 21212121 비선형 다이오우드 정류기 부하에서 필터 인덕터가 일 때 출750uH
력전압파형 파형 출력전압파형 다이오우드 정류기 전류파형(4:PWM , 3: ,2: )
그림 는 출력 필터의 인덕터값으 로 낮추었을 때의 출력전압 파형이다22 F150uH .
앞서 해석한 바와 같이 출력전압왜곡을 방지하기 위한 소프트웨어적인 알고리즘을
전혀 적용하지 않았음에도 출력전압에서의 전압왜곡현상의 상당히 줄어들었음을 알
수가 있다 이 때의 출력전압 값은 로 측정되었다. THD 3.8% .
지금 출력필터의 영향을 최소화하기 위한 형태로 출력필터의 인덕턴스값을 줄여 설
계하는 방법에 대해서 알아 보았다 시뮬레이션 및 실험을 통하여 필터 인덕턴스를.
최적화해서 설계함으로 인해 출력전압의 왜곡현상을 상당히 줄여줄 수 있음을 확인
할 수 있었다 그러나 이 경우 필터인덕턴스가 낮아짐에 따라 몇 가지 문제점이 발.
생함을 간과해서는 안된다.
필터 인덕터가 낮아 짐에 따라 필터 전류의 리플값이 증가하게 되어 필터에 부가-
적이 손실이 발생될 수 있으며 필터 커패시스터에도 고조파 전류가 증가되어 커패
시터의 수명에도 영향을 미칠 수가 있다.
일반적 로 시스템의 안정성을 최대한 보장하기 위해 병렬운전으로 만이 운- UPSㅇ
영되고 있는데 출력필터의 인덕터가 줄어들면 들수록 병렬제어에 대한 부담이 증가
할 수 있다.

- 40 -
따라서 이런 문제점이 상존하므로 필터 설계에 의한 전압왜곡방지 방식만으로는 한
계가 있을 걸로 보이면 소프트웨어 알고리즘에 의한 방법과 병행하여 사용하여야
할 것으로 보인다.
그림그림그림그림 22222222 비선형 다이오우드 정류기 부하에서 필터 인덕터가 일750uH
때 출력전압파형 파형 출력전압파형 다이오우드 정류기(4:PWM , 3: , 2:
전류파형)
제 절 기술지원 성과제 절 기술지원 성과제 절 기술지원 성과제 절 기술지원 성과2222
앞서 여러 가지 고조파 제거를 위한 알고리즘을 살펴보았다 본 과제에서는 여러.
가지를 고려하여 첫 번째 소개한 방식을 적용하기로 하였다 두 번째 고조파분석에.
의한 방법은 완전한 평형부하에서만 적용이 용이할 것으로 판단되고 세 번째 디지
털제어기를 설계하여 고조파를 제거하는 방법은 샘플링 타임의 딜레이에 대한 대책
이 완비되어야 제 성능이 나올 것으로 판단되었다 첫 번째 방식으로 구현하기 위.
해서는 먼저 신호의 주파수성분을 분리해 내는 방법이 필요하다 따라서 주파수분.
석법을 포함하여 알고리즘의 구현 시스템의 구성 및 비선형 부하에 대해서 알아보,
기로 하겠다.

- 41 -
고조파 성분 추출 알고리즘 구현고조파 성분 추출 알고리즘 구현고조파 성분 추출 알고리즘 구현고조파 성분 추출 알고리즘 구현1.1.1.1.
모든 신호는 과 의 합으로 표시 될 수 있다 기본 주파수 고조파 성분sin cos . + 3 +
고조파 성분 고조파 성분 즉 다음과 같은 식으로 나타낼 수 있다5 +7 + ... .
여기서 기본주파수에 해당하는 신호를 곱하면 삼각함수의 곱의 수식으로부터 아래
와 같은 수식을 얻을 수 있다.
기본파 성분의 크기는 수식의 결과인 에서 직류성분만 뽑아 내면된다. 를
잘 살펴보면 직류성분과 배의 기본파 성분 이상의 성분의 합으로 표시되어 있으므2
로 배의 주파수동안 신호 성분2 를 평균하게 되면 직류성분 이외의 값은 전부
이 되고 직류성분만 얻을 수 있다 이때 얻어진 직류성분은 원래 기본파의 반의0 .
크기이므로 이를 배하면 기본파 성분을 간단히 얻을 수 있다2 .
고조파 성분을 뽑아내고 싶으면 위와 똑같은 방법으로 얻을 수 있다 이때는 위상3 .
관계도 있기 때문에 고조파 성분에는 과 성분이 있으므로 이를 찾아내서면sin cos
위상도 얻을 수 있다.
여기에 고조파 성분을 곱하면 위에서와 같이 배의 주파수 주기 동안 적분하면 직3 2
류성분이 얻어 지고 이 값이 고조파 성분이 된다 고조파 을 곱하면 성3 . 3 cos cos
분을 얻을 수 있고 고조파 을 곱하면 성분의 크기를 얻을 수 있다3 sin sin .
각각의 고조파 신호를 번의 곱하기와 기본파 성분의 주기 동안만 적분하게 되2 1/2
면 간단히 고조파 신호를 얻을 수 있다.
- 42 -
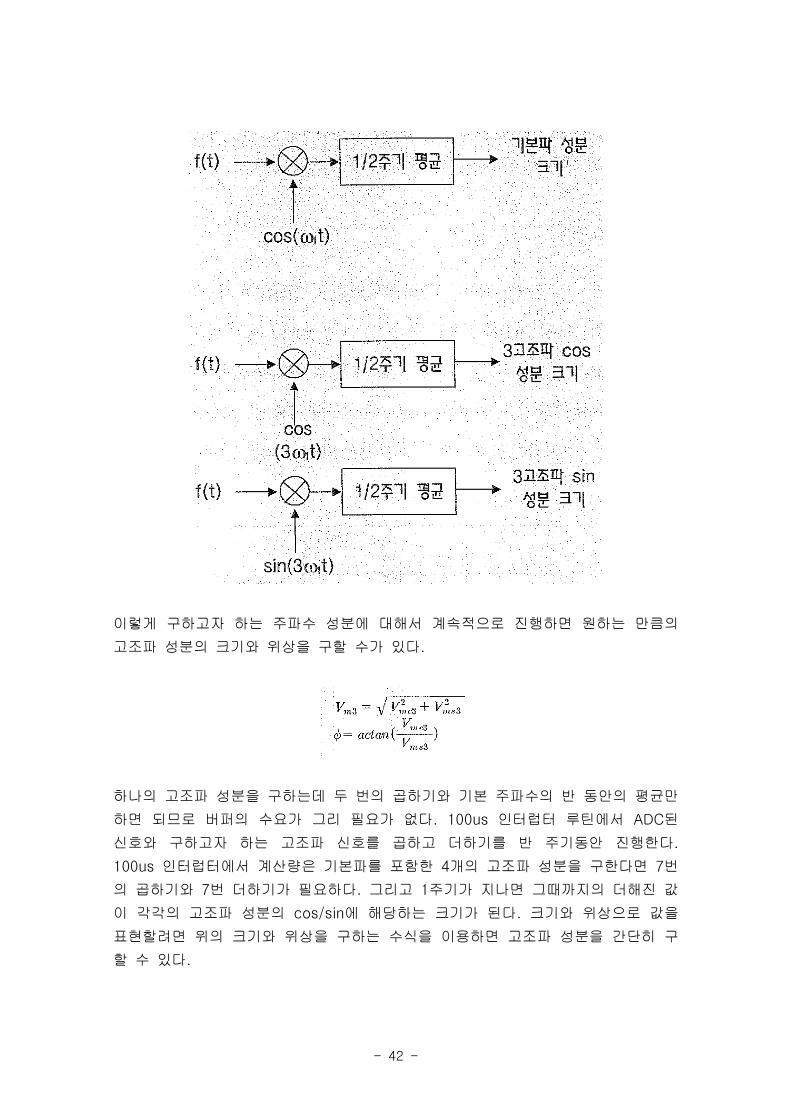
이렇게 구하고자 하는 주파수 성분에 대해서 계속적으로 진행하면 원하는 만큼의
고조파 성분의 크기와 위상을 구할 수가 있다.
하나의 고조파 성분을 구하는데 두 번의 곱하기와 기본 주파수의 반 동안의 평균만
하면 되므로 버퍼의 수요가 그리 필요가 없다 인터럽터 루틴에서 된. 100us ADC
신호와 구하고자 하는 고조파 신호를 곱하고 더하기를 반 주기동안 진행한다.
인터럽터에서 계산량은 기본파를 포함한 개의 고조파 성분을 구한다면 번100us 4 7
의 곱하기와 번 더하기가 필요하다 그리고 주기가 지나면 그때까지의 더해진 값7 . 1
이 각각의 고조파 성분의 에 해당하는 크기가 된다 크기와 위상으로 값을cos/sin .
표현할려면 위의 크기와 위상을 구하는 수식을 이용하면 고조파 성분을 간단히 구
할 수 있다.

- 43 -
위 방식대로 하면 고조파 성분이 반주기 마다 구해지게 되므로 제어주기가 반주기
가 되게 된다 이보다 매 인터럽터주기 마다 제어하기를 원하면 링버터를 이용하여.
반주기 동안의 값을 저장하면서 합을 구하면 매 인터럽터주기 마다 고조파량을 구
할 수가 있으며 이때 나오는 값은 반주기동안 평균한 값이 연속적으로 나오게 된
다.
시스템 제어기 개발시스템 제어기 개발시스템 제어기 개발시스템 제어기 개발2.2.2.2.
제어보드의 메인 컨트롤러는 사의 이하 를 사용하였다TI TMS320F2812( F2812) .
는 정수형 로서 산업용 제품에 적용될 수 있도록 내부에F2812 32bit DSP 12bit
및 을 비롯하여 등의 통신기능을 내장하고 있다 기A/D 16bit PWM SCI, SPI, CAN .
존의 계열의 느린 속도 및 연산의 한계를 개선하여 연산 및F240x 16bit 32bit 16bit
연산기능을 지원하며 소숫점 연산을 지원하기 위하여 라는 라이브러리Dual IQmath
를 제공한다 그림 는 내부구조이다. 55 F2812dml .
그림 의 내부구조그림 의 내부구조그림 의 내부구조그림 의 내부구조25 F281225 F281225 F281225 F2812
- 44 -
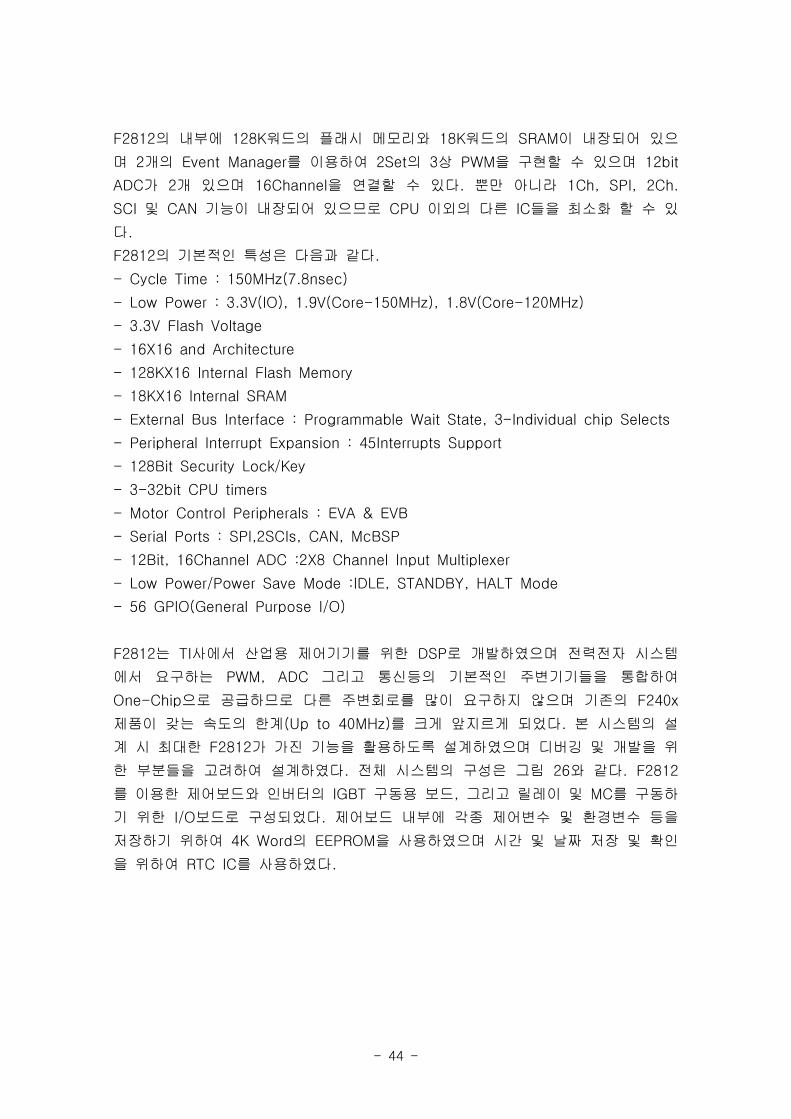
의 내부에 워드의 플래시 메모리와 워드의 이 내장되어 있으F2812 128K 18K SRAM
며 개의 를 이용하여 의 상 을 구현할 수 있으며2 Event Manager 2Set 3 PWM 12bit
가 개 있으며 을 연결할 수 있다 뿐만 아니라ADC 2 16Channel . 1Ch, SPI, 2Ch.
및 기능이 내장되어 있으므로 이외의 다른 들을 최소화 할 수 있SCI CAN CPU IC
다.
의 기본적인 특성은 다음과 같다F2812 .
- Cycle Time : 150MHz(7.8nsec)
- Low Power : 3.3V(IO), 1.9V(Core-150MHz), 1.8V(Core-120MHz)
- 3.3V Flash Voltage
- 16X16 and Architecture
- 128KX16 Internal Flash Memory
- 18KX16 Internal SRAM
- External Bus Interface : Programmable Wait State, 3-Individual chip Selects
- Peripheral Interrupt Expansion : 45Interrupts Support
- 128Bit Security Lock/Key
- 3-32bit CPU timers
- Motor Control Peripherals : EVA & EVB
- Serial Ports : SPI,2SCIs, CAN, McBSP
- 12Bit, 16Channel ADC :2X8 Channel Input Multiplexer
- Low Power/Power Save Mode :IDLE, STANDBY, HALT Mode
- 56 GPIO(General Purpose I/O)
는 사에서 산업용 제어기기를 위한 로 개발하였으며 전력전자 시스템F2812 TI DSP
에서 요구하는 그리고 통신등의 기본적인 주변기기들을 통합하여PWM, ADC
으로 공급하므로 다른 주변회로를 많이 요구하지 않으며 기존의One-Chip F240x
제품이 갖는 속도의 한계 를 크게 앞지르게 되었다 본 시스템의 설(Up to 40MHz) .
계 시 최대한 가 가진 기능을 활용하도록 설계하였으며 디버깅 및 개발을 위F2812
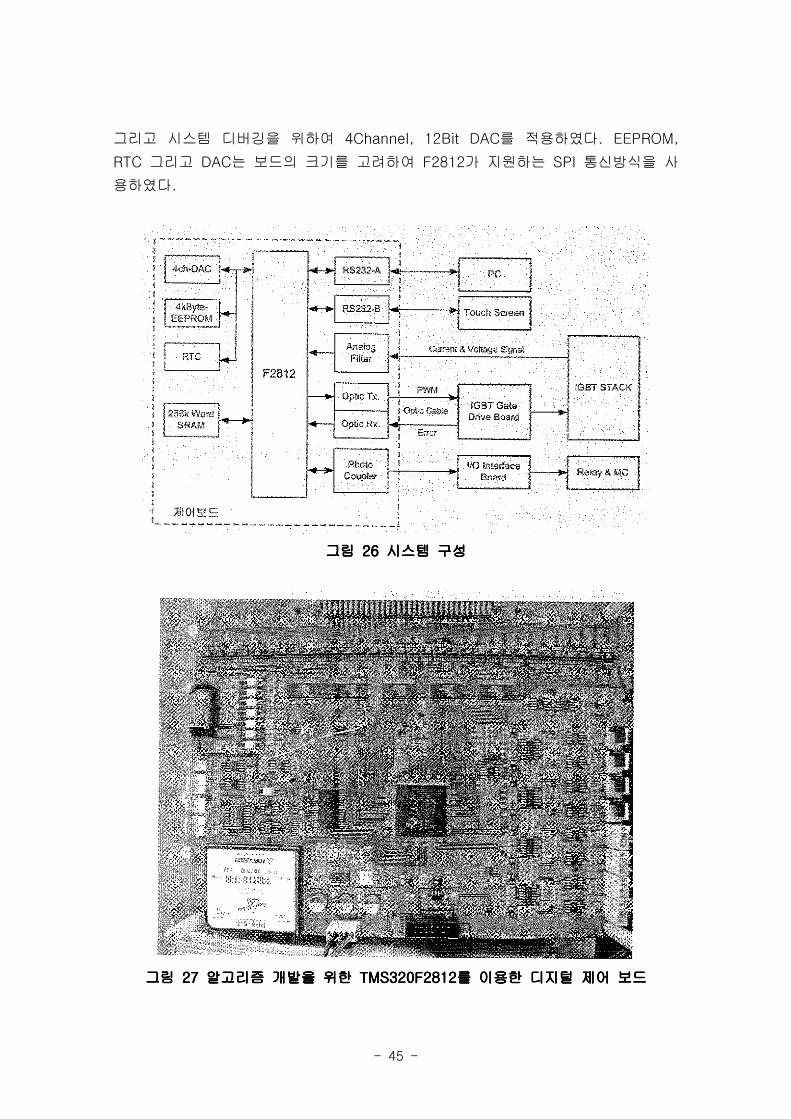
한 부분들을 고려하여 설계하였다 전체 시스템의 구성은 그림 와 같다. 26 . F2812
를 이용한 제어보드와 인버터의 구동용 보드 그리고 릴레이 및 를 구동하IGBT , MC
기 위한 보드로 구성되었다 제어보드 내부에 각종 제어변수 및 환경변수 등을I/O .
저장하기 위하여 의 을 사용하였으며 시간 및 날짜 저장 및 확인4K Word EEPROM
을 위하여 를 사용하였다RTC IC .
- 45 -
그리고 시스템 디버깅을 위하여 를 적용하였다4Channel, 12Bit DAC . EEPROM,
그리고 는 보드의 크기를 고려하여 가 지원하는 통신방식을 사RTC DAC F2812 SPI
용하였다.
그림 시스템 구성그림 시스템 구성그림 시스템 구성그림 시스템 구성26262626
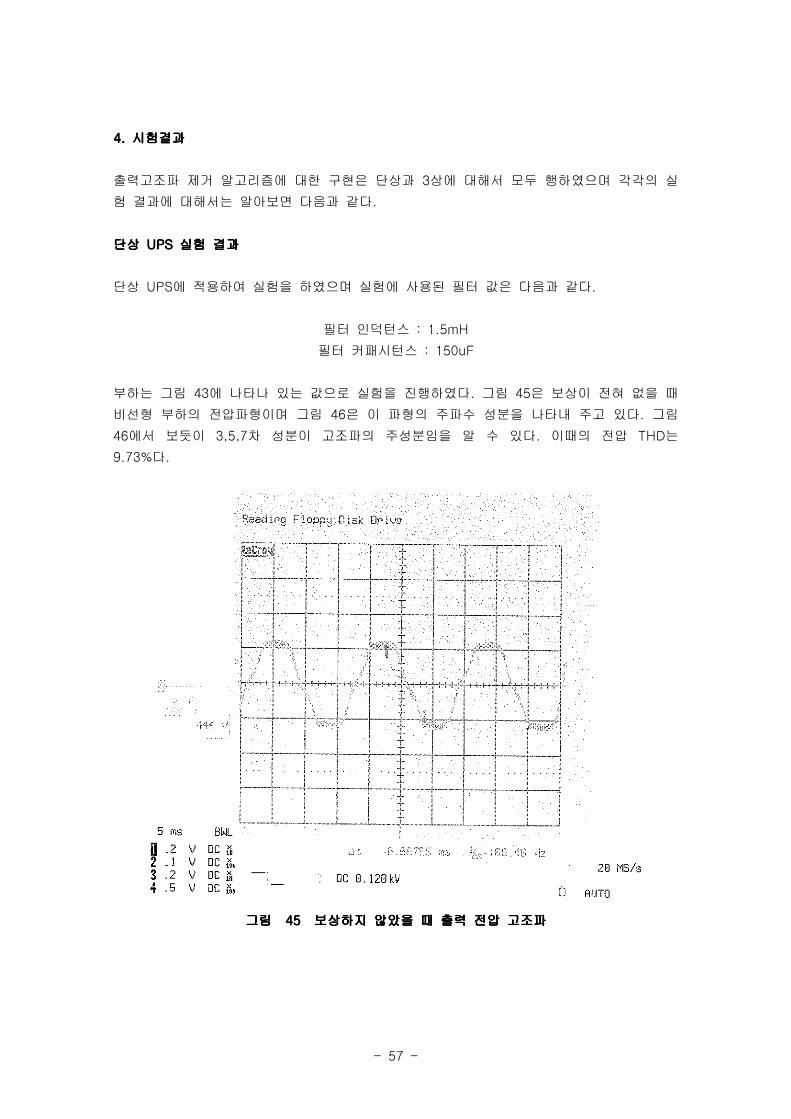
그림 알고리즘 개발을 위한 를 이용한 디지털 제어 보드그림 알고리즘 개발을 위한 를 이용한 디지털 제어 보드그림 알고리즘 개발을 위한 를 이용한 디지털 제어 보드그림 알고리즘 개발을 위한 를 이용한 디지털 제어 보드27 TMS320F281227 TMS320F281227 TMS320F281227 TMS320F2812

- 46 -
그림 은 자체 제작한 제어보드이다 아날로그 입력부를 제외하고 모27 F2812 DSP .
든 디지털 신호 및 통신부는 고속 및 저속 포토커플러를 이용하여 완전 절연하였으
며 캐릭터 및 그래픽 를 부착할 수 있는 단자도 마련되었다LCD .
전원부전원부전원부전원부
는 와 를 사용한다 디지털 시스템을 위한 와F2812 IO(3.3V) Core(1.9V-150MHz) . 5V
등의 아날로그 전원을 위한 의 전원을 를 통하여 제어보OP-Amp +15V, -15V SMPS
드에서 공급받고 제어보드 내부에서 외부 및 통신등을 위하여 절연되 전원을I/O 5V
컨버터 모듈을 통하여 공급한다 제어보드 내부의 제어전원은 아날로그 입DC-DC .
력을 제외하고 모두 외부와 포토커플러등을 이용하여 절연하여 노이즈 입력을 차단
하도록 설계하였다 코어 전원 및 전원 은 사의. DSP (1.9V) I/O (3.3V) TI One-Chip
를 이용하여 공급하였다LDO(Low drop Output) IC .

- 47 -
그림 외부 및 통신을 위한 절연 공급부그림 외부 및 통신을 위한 절연 공급부그림 외부 및 통신을 위한 절연 공급부그림 외부 및 통신을 위한 절연 공급부29 I/O 5V29 I/O 5V29 I/O 5V29 I/O 5V
는 가 내장되어 있으며 를 위한 전원도 공급 여야 한다 아F2812 12Bit ADC ADC .ㅎ
날로그 입력에 대한 및 노이즈 제거를 위하여 아날로그 전원 를 따로Drift (3.3V)
전원 를 아날로그 에서 단으로 방식을 이용하여 개끗한 전원을3.3V IC 15V 2 Linear
공급하고 보드 제작시 보드 내의 아래쪽에 디지털 부분과 아날로그 부분을 공DSP
통 그라운드로 연결하였다.
그림 내부 전원공급부그림 내부 전원공급부그림 내부 전원공급부그림 내부 전원공급부30 DSP ADC30 DSP ADC30 DSP ADC30 DSP ADC
통신비통신비통신비통신비
외부 통신은 통신을 이용하여 에서 개의 통신을 지원하므로RS232 F2812 2 SCI 1Ch.
은 와 연결하여 의 디버깅 및 프로그램 다운로딩에 사용하였으며 다른PC F2812
은 장비 전면에 부착되는 컬러 터치 스크린과의 통신에 사용하였다1Ch. 3.5“ .

- 48 -
그림 통신부그림 통신부그림 통신부그림 통신부31 SCI31 SCI31 SCI31 SCI
외부장치와 통신을 위하여 사용된 및 통신은 모두 절연을 기본으RS-232 RS-485
로 하여 컴퓨터 혹은 외부장치와 통신중 발생하는 오류를 최소화하였다 이때 사용.
된 포트 커플러는 고속 디지털 데이터 통신용인 사의 를 사용하AGILENT HCPL0631
였다 그리고 와 안정된 인터페이스를 위하여 디지털 버퍼를 사용하였다. DSP .
그림 선택부그림 선택부그림 선택부그림 선택부32 RS-48532 RS-48532 RS-48532 RS-485

- 49 -
그림 및 통신부그림 및 통신부그림 및 통신부그림 및 통신부33 RS-232C RS-28533 RS-232C RS-28533 RS-232C RS-28533 RS-232C RS-285
의 경우 의 를 이용하여 선택할 수 있도록 설계하였다RS-485 DSP GPIO .
그림 통신부그림 통신부그림 통신부그림 통신부34 CAN34 CAN34 CAN34 CAN
에 내장된 드라이버에서 발생한 신호와 신호를 외부로 전달하DSP CAN CAN RX TX
기 위하여 을 사용하였다PCA82C250 .

- 50 -
아날로그 인터페이스아날로그 인터페이스아날로그 인터페이스아날로그 인터페이스
그림 아날로그 인터페이스그림 아날로그 인터페이스그림 아날로그 인터페이스그림 아날로그 인터페이스35353535
전압 및 전류센서의 출력신호들 상호간의 노이즈를 제거하고 좀 더 정밀한 변환AD
을 위하여 사의 차동앰프를 적용하였다 는 의 신호를 입TI INA-133 . F2812 0~3[V]
력받을 수 있으므로 마이너스 신호를 입력받을 수 있도록 를1.2[V] Reference IC
이용하였다 차동앰프 입력단의 저항값을 조정하여 입력전압 범위를 조정할 수 있.
도록 하였으며 전압출력형 및 전류출력형 센서 모두 사용할 수 있도록 설계하였다.
그리고 기준전압을 직접 에서 입력받아 옵셋을 정확하게 계산할 수 있1.2[V] f2912
도록 하였다 차동앰프 후단에는 차 저역필터를 사용하였으며 단방향 및 양방향. 2
입력을 선택해서 받을 수 있도록 기준전압을 선택하도록 설계하였다 입ADC . ADC
력부에는 다이오드를 이용하여 과전압에 대한 보호 회로를 추가하였다 의. F2812
아날로그 입력전압은 로 다른 전력전자 시스템보다 낮은 편이다 따라서 아0~3[V] .
날로그 부분의 회로 설계 및 상태에 따라 성능이 크게 변할 수 있으므로PCB ADC
주의를 요한다.
그림 아날로그 옵셋 발생부그림 아날로그 옵셋 발생부그림 아날로그 옵셋 발생부그림 아날로그 옵셋 발생부36363636

- 51 -
그림 아날로그 입력부그림 아날로그 입력부그림 아날로그 입력부그림 아날로그 입력부37373737
그림그림그림그림 38 ADC38 ADC38 ADC38 ADC
입력 보호부입력 보호부입력 보호부입력 보호부
게이트 드라이브부게이트 드라이브부게이트 드라이브부게이트 드라이브부
그림 은 게이트 드라이브 보드를 보여주고 있다 게이트 드라이브 보드에는 게이39 .
트 드라이브에 사용될 전원보드를 포함하고 있으며 를 보호하기 위한IGBT
기능을 포함하고 있다protection .
인버터 부인버터 부인버터 부인버터 부
그림 은 를 이용하여 알고리즘의 성능을 검증하기 위해 제작된 단상 인버터40 IGBT
시스템을 보여주고 있다 는 의 용량의 것을 사용하여 제작되. IGBT EUPEC 50A 600V
었다 그림 은 릴레이 를 사용하여 시스템을 구성한 알고리즘 시험용. 41 , MC, NFB
의 전면부를 부여하주고 있다UPS .

- 52 -
그림 드라이브 보드그림 드라이브 보드그림 드라이브 보드그림 드라이브 보드39 IGBT39 IGBT39 IGBT39 IGBT
그림 알고리즘 개발용으로 제작한 단상 의 전력소자 부그림 알고리즘 개발용으로 제작한 단상 의 전력소자 부그림 알고리즘 개발용으로 제작한 단상 의 전력소자 부그림 알고리즘 개발용으로 제작한 단상 의 전력소자 부40 UPS IGBT40 UPS IGBT40 UPS IGBT40 UPS IGBT

- 53 -
그림 알고리즘 시험용 의 전면부그림 알고리즘 시험용 의 전면부그림 알고리즘 시험용 의 전면부그림 알고리즘 시험용 의 전면부41 UPS41 UPS41 UPS41 UPS
비선형 부하 선정 및 부하 제작비선형 부하 선정 및 부하 제작비선형 부하 선정 및 부하 제작비선형 부하 선정 및 부하 제작3.3.3.3.
단산 정상 상태 정류기 커패시터 부하의 모의 실험을 위해 의 부하는 브리지/ UPS
정류 회로 출력에 병렬로 커패시터와 저항기를 가지는 부하를 연결한다 총 단상.
부하는 그림 에서 처럼 단일 부하로 형성할 수도 있고 병렬의 다중 평형 부하로23
형성 할 수도 있다 그리고 저항기. Rs는 정류기 브리지의 교류 쪽이나 직류 쪽 중
어느 곳에나 위치할 수 있다.
그림 다이오우드 정류기로그림 다이오우드 정류기로그림 다이오우드 정류기로그림 다이오우드 정류기로42424242
구성된 비선형 부하구성된 비선형 부하구성된 비선형 부하구성된 비선형 부하

- 54 -
가 변수의 계산 방법가 변수의 계산 방법가 변수의 계산 방법가 변수의 계산 방법....
Vc 의 정격 출력 전압 실효값UPS ,
f 출력 주파수UPS , Hz
Vo 정류 전압
S기준 비선형 부하의 피상 전력 역률 예를 들어 피상 전력의 가( 0.7, 70%
Ro과 R2 두 저항기 내에서 유효 전력으로 소비되는 경우)
Ro
부하저항기 총 피상 전력 의 에 해당하는 유효 전력을 소비시키기: S 66%
위한 장치
R2
직렬 저항기 총 피상 전력 의 에 해당하는 유효 전력을 소비시키기: S 4%
위한 장치
커패시터 전압 Vo의 피크 피크의 리플 전압은5% : Ro × C= 7.5/f의 시간 상수와 일
치한다 최고전압 선간 전압의 왜곡 선간 케이블에서의 전압 강하와 정류 전압의 리플 전. , ,
압으로부터 정류 전압 Vo의 평균값은 경험적으로 다음과 같다.
그리고 저항 Rs, Ro와 커패시터는 C는 다음과 같이 계산된다.
나 의 이중 주파수에 대해서는 가 계산에 사용되어야 한다 사용되는 정전50Hz 60Hz 50Hz .
용량값은 계산된 값보다 작아서는 안 된다.
비고 :
다이오드 브리지의 전압 강하는 무시한다1. .
계산된 성분값의 허용오차는 다음과 같다2. .

- 55 -
Rs :±10%
Ro 정격출력피상전력을얻기위해시험중에조정됨:
C:0 ~ 25%
나 시험방법나 시험방법나 시험방법나 시험방법....
기준 비선형 부하 시험 회로는 처음에는 시험 중의 개체에 대해 규정된 정격 출력a) UPS
전압에서 교류 입력 전원에 연결한다.
교류 입력 전원 임피던스는 이 시험의 부하가 인가되었을 때 입력 파형의 왜곡이 보b) 8%
다 크게 생겨서는 안 된다 의 요구사항(IEC 61000-2-2 )
저항기c) Ro는 규정된 정격 출력 피상 전력(S 를 얻기 위해 조정되어야 한다) .
저항기d) Ro를 조정한 후에는 더 이상의 조정 없이 기준 비선형 부하가 시험 중인 출UPS
력에 인가되어야 한다.
여러 절에서 정의된 것처럼 기준 비선형 부하에서 요구되는 파라미터를 얻기 위한 모든e) ,
시험을 수행하는 동안에는 더 이상의 조정없이 시험 부하가 사용된다.
기준 비선형 부하를 에 연결하는 방법은 다음과 같다UPS .
단상 의 경우a) UPS 33kVA까지는무정전 전원 장치의 정격 피상 전력과 동등한 피상 전력
S의 기준 비선형 부하가 사용된다.
이상인 단상 경우b) 33kVA UPS , 33kVA의 피상 전력 의 기준 비선형 부하에 선형 부하S
를 추가하여 무정전 전원 장치의 정격 피상 및 유효전력이 되도록 함께 사용도어야 한다.
단상 부하용으로 계획된c) 100kVA까지로 정격된 삼상 에 대해서 개의 등가 단상 기UPS 3
준 비선형 부하를 설계에 따라 상간 또는 선간에 연결되어야 한다UPS .
정격d) 100kVA 이상의 삼상 에 대해서는 항목과 일치하는 부하에 선형 부하를 더하UPS c)
여 의 피상 및 유효 전력에 이르도록 사용되어야 한다UPS .
시험용 부하는 그림 와 같은 구조로 제작하였다 스위치를 이용하여 부하를 변경하면서24 .
시험할 수 있게 제작되었으며 비선형 및 선형 부하 모두를 시험할 수 있게 제작되었다.

- 56 -
그림 시험용 비선형부하 구성도그림 시험용 비선형부하 구성도그림 시험용 비선형부하 구성도그림 시험용 비선형부하 구성도43434343
그림 은 제작된 부하의 모습을 보여주고 있으며 전면에 전선 연결부와 부하의 크기 및25
종류를 선택할 수 있는 스위치가 배치되어 있다.
그림 시험용으로 제작된 다이오우드 비선형 부하그림 시험용으로 제작된 다이오우드 비선형 부하그림 시험용으로 제작된 다이오우드 비선형 부하그림 시험용으로 제작된 다이오우드 비선형 부하44444444
- 57 -
시험결과시험결과시험결과시험결과4.4.4.4.
출력고조파 제거 알고리즘에 대한 구현은 단상과 상에 대해서 모두 행하였으며 각각의 실3
험 결과에 대해서는 알아보면 다음과 같다.
단상 실험 결과단상 실험 결과단상 실험 결과단상 실험 결과UPSUPSUPSUPS
단상 에 적용하여 실험을 하였으며 실험에 사용된 필터 값은 다음과 같다UPS .
필터 인덕턴스 : 1.5mH
필터 커패시턴스 : 150uF
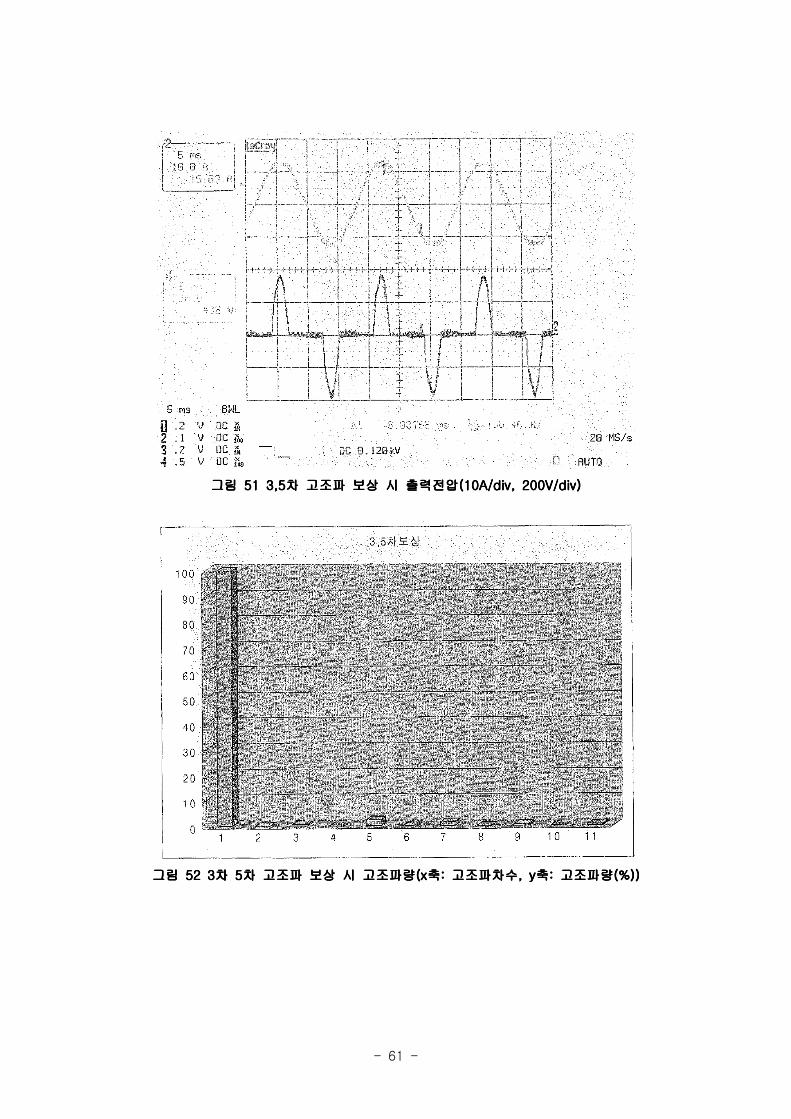
부하는 그림 에 나타나 있는 값으로 실험을 진행하였다 그림 은 보상이 전혀 없을 때43 . 45
비선형 부하의 전압파형이며 그림 은 이 파형의 주파수 성분을 나타내 주고 있다 그림46 .
에서 보듯이 차 성분이 고조파의 주성분임을 알 수 있다 이때의 전압 는46 3,5,7 . THD
다9.73% .
그림 보상하지 않았을 때 출력 전압 고조파그림 보상하지 않았을 때 출력 전압 고조파그림 보상하지 않았을 때 출력 전압 고조파그림 보상하지 않았을 때 출력 전압 고조파45454545

- 58 -
그림 보상하지 않았을 때 출력전압 고조파 축 고조파 차수 축그림 보상하지 않았을 때 출력전압 고조파 축 고조파 차수 축그림 보상하지 않았을 때 출력전압 고조파 축 고조파 차수 축그림 보상하지 않았을 때 출력전압 고조파 축 고조파 차수 축46 (x : , y :46 (x : , y :46 (x : , y :46 (x : , y :
고조파량고조파량고조파량고조파량(%))(%))(%))(%))
고조파 제거 알고리즘의 효용성과 고조파 성분에 대한 제거 영향을 알아보기 위해 여러 가
지 차수의 성분은 제어 하면서 성능을 살펴보았다.
그림 은 차 고조파만 제거 했을 때 전압파형을 보여주고 있으며 이때의 주파수분석을47 3
통한 고조파 값은 그림 에 잘 나타나 있다 출력전압 파형에서 알 수 있듯이 차만 제거48 . 3
해서는 고조파가 원하는 만큼 줄어들지 않음을 알 수 있으며 고조파 성분이 오히려 증가5
됨을 볼 수가 있다 이때의 출력전압 는 로 보상을 하지 않았을 때의 값과 비교. THD 9.63%
해서 별로 나아지지 않았음을 알 수 있다 다음으로 차 고조파만 추출하여 보상하였을 때. 5
출력파형을 그림 에서 볼 수 있다 그림 은 출력전압의 고조파 분석 그래프이다 차49 . 50 . 3
보상 때 보다는 나아지나 아직 차 고조파가 상당량 남아 있음을 알 수가 있다 이 때 출력3 .
전압의 는 이다 은 차 고조파를 동시에 제어한 경우의 전압 파형이THD 8.07% . MFLA 51 3,5
며 그림 는 고조파량에 대한 그래프이다 전체적인 전압 가 로 만족할 만한 출52 . THD 3.16%
력고조파 제거 특성을 보이고 있다 그림 은 차 고조파를 제거하였을 때의 전압파형이. 3,5,7
며 그림 은 이때의 고조파량을 보여주고 있다 이는 앞서의 차 고조파 제거 시와 비교해. 3,5
별로 차이가 없음을 알 수가 있다 차 고조파가 기본적으로 적게 발생하기 때문에 생기는. 7
현상이라고 할 수 있겠다.

- 59 -
그림 차고조파만 보상했을 때 출력전압그림 차고조파만 보상했을 때 출력전압그림 차고조파만 보상했을 때 출력전압그림 차고조파만 보상했을 때 출력전압47 3 (10A/div, 200V/div)47 3 (10A/div, 200V/div)47 3 (10A/div, 200V/div)47 3 (10A/div, 200V/div)
그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파48 3 (x :48 3 (x :48 3 (x :48 3 (x :
차수 축 고조파량차수 축 고조파량차수 축 고조파량차수 축 고조파량, y : (%)), y : (%)), y : (%)), y : (%))

- 60 -
그림 차고조파만 보상했을 때 출력전압파형그림 차고조파만 보상했을 때 출력전압파형그림 차고조파만 보상했을 때 출력전압파형그림 차고조파만 보상했을 때 출력전압파형49 5 (10A/div, 200V/div)49 5 (10A/div, 200V/div)49 5 (10A/div, 200V/div)49 5 (10A/div, 200V/div)
그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파차수 축 고조파량그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파차수 축 고조파량그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파차수 축 고조파량그림 차고조파만 보상했을 때 출력전압 고조파 축 고조파차수 축 고조파량50 5 (x : , y : (%))50 5 (x : , y : (%))50 5 (x : , y : (%))50 5 (x : , y : (%))
- 61 -
그림 차 고조파 보상 시 출력전압그림 차 고조파 보상 시 출력전압그림 차 고조파 보상 시 출력전압그림 차 고조파 보상 시 출력전압51 3,5 (10A/div, 200V/div)51 3,5 (10A/div, 200V/div)51 3,5 (10A/div, 200V/div)51 3,5 (10A/div, 200V/div)
그림 차 차 고조파 보상 시 고조파량 축 고조파차수 축 고조파량그림 차 차 고조파 보상 시 고조파량 축 고조파차수 축 고조파량그림 차 차 고조파 보상 시 고조파량 축 고조파차수 축 고조파량그림 차 차 고조파 보상 시 고조파량 축 고조파차수 축 고조파량52 3 5 (x : , y : (%))52 3 5 (x : , y : (%))52 3 5 (x : , y : (%))52 3 5 (x : , y : (%))

- 62 -
그림 차 고조파 보상 시 출력전압그림 차 고조파 보상 시 출력전압그림 차 고조파 보상 시 출력전압그림 차 고조파 보상 시 출력전압53 3,5,7 (10A/div, 200V/div)53 3,5,7 (10A/div, 200V/div)53 3,5,7 (10A/div, 200V/div)53 3,5,7 (10A/div, 200V/div)
그림 차 고조파 보상 시 출력전압 고자파 축 고조파차수 축 고조파량그림 차 고조파 보상 시 출력전압 고자파 축 고조파차수 축 고조파량그림 차 고조파 보상 시 출력전압 고자파 축 고조파차수 축 고조파량그림 차 고조파 보상 시 출력전압 고자파 축 고조파차수 축 고조파량54 3,5,7 (x : , y : (%))54 3,5,7 (x : , y : (%))54 3,5,7 (x : , y : (%))54 3,5,7 (x : , y : (%))

- 63 -
그림 는 보상차수에 따른 고조파의 변화를 한눈에 불 수 있게 한 그림에 표시한 것이다55 .
차만 보상하여도 만족할 만한 고조파 보상 특성을 얻을 수 있음을 알 수 있으며 고조3,5,7
파 제거에 따른 전압 에 대한 값을 표 에 정리하였다THD 4 .
그림 고조파 보상에 따른 출력전압 고조파량그림 고조파 보상에 따른 출력전압 고조파량그림 고조파 보상에 따른 출력전압 고조파량그림 고조파 보상에 따른 출력전압 고조파량55555555
표 고조파 제거항에 따른 전압 의 변화표 고조파 제거항에 따른 전압 의 변화표 고조파 제거항에 따른 전압 의 변화표 고조파 제거항에 따른 전압 의 변화THDTHDTHDTHD
고조파 제거 전압 THD(%)
무보상 9.73
차 제거3 9.63
차 제거5 8.07
차 차 제거3 5 3.16
차 차 차 제거3 , 5 , 7 3.14

- 64 -
그림 은 고조파 보상에 따른 차 고조파의 변화량을 보여주고 있다 첫 번째는 무보상일56 3 .
때의 차 고조파량을 나타내고 있고 두 번째는 차 고조파만 보상했을 때 차 고조파량을3 3 3
나타낸다 고조파 보상이 진행됨에 따라 양이 급격하게 줄어든 것을 알 수 있다 세 번째는. .
차고조파만 보상했을 때 차 고조파량을 보여주고 있으며 오히려 보상하지 않았을 때 보5 3
다 차 고조파량이 증가하였음을 알 수 있다 네 번째와 다섯 번째는 차만 보상 또는3 . 3,5
차를 보상했을 때 차 고조파량으 보여주고 있으면 적은 량으로 잘 제어되고 있음을3.5.7 3 f
알 수 있다.
그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상56 3 (1: , 2:3 , 3:5 ,56 3 (1: , 2:3 , 3:5 ,56 3 (1: , 2:3 , 3:5 ,56 3 (1: , 2:3 , 3:5 ,
차보상 차보상 축 고조파량차보상 차보상 축 고조파량차보상 차보상 축 고조파량차보상 차보상 축 고조파량4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))

- 65 -
그림 은 고조파제어 알고리즘 적용에 따른 차 고조파량의 변화를 보여주고 있다 차만57 5 . 3
보상했을 때는 보상하지 않았을 때보다 고조파 량이 증가됨을 알 수 있다 차 또는 차. 5 3,5
보상 또는 차 보상에서는 차 고조파가 잘 제어됨을 알 수 있다3,5,7 5 .
그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상57 5 (1: , 2:3 , 3:5 ,57 5 (1: , 2:3 , 3:5 ,57 5 (1: , 2:3 , 3:5 ,57 5 (1: , 2:3 , 3:5 ,
차보상 차보상 축 고조파량차보상 차보상 축 고조파량차보상 차보상 축 고조파량차보상 차보상 축 고조파량4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))
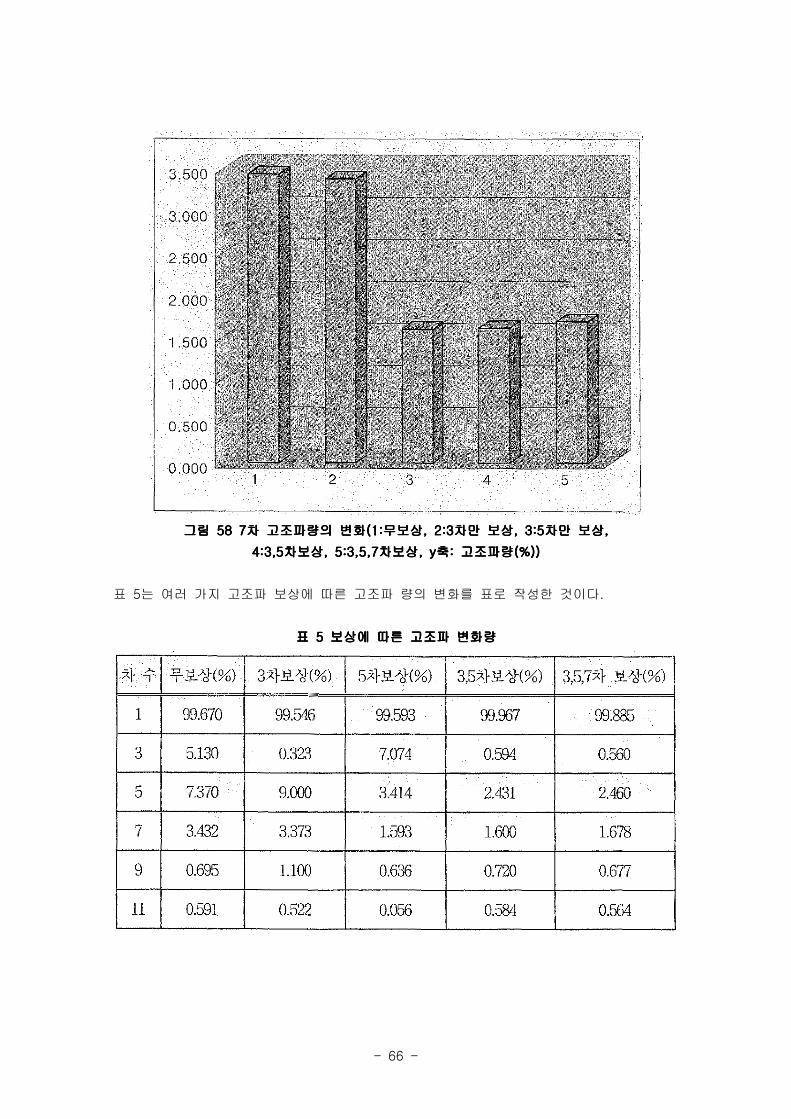
그림 은 고조파 보상에 따른 차 고조파변화량을 보여준다 보상하지 않았을 대와 차 고주7 . 3
파만 보상했을 때 차 고조파의 변화는 거의 없는 상태이며 차를 보상하기 시작하면서7 5 7
차 고조파가 확연히 줄어듦을 알 수 있다.
- 66 -
그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상그림 차 고조파량의 변화 무보상 차만 보상 차만 보상58 7 (1: , 2:3 , 3:5 ,58 7 (1: , 2:3 , 3:5 ,58 7 (1: , 2:3 , 3:5 ,58 7 (1: , 2:3 , 3:5 ,
차보상 차보상 축 고조파량차보상 차보상 축 고조파량차보상 차보상 축 고조파량차보상 차보상 축 고조파량4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))4:3,5 , 5:3,5,7 , y : (%))
표 는 여러 가지 고조파 보상에 따른 고조파 량의 변화를 표로 작성한 것이다5 .
표 보상에 따른 고조파 변화량표 보상에 따른 고조파 변화량표 보상에 따른 고조파 변화량표 보상에 따른 고조파 변화량5555

- 67 -
상 적용 실험결과상 적용 실험결과상 적용 실험결과상 적용 실험결과3 UPS3 UPS3 UPS3 UPS
상 에 고조파 분석법을 이용한 출력고조파 제거 알고리즘을 적용하였다 상에 대해서3 UPS . 3
모두 고조파 분석을 행하였으며 각 상에 대해서 제어기를 적용하여 고조파를 제거하였다.
제작하여 실험한 의 사양은 다음과 같다UPS .
출력 : 130kVA,
필터 커패시터 : 450uF,
필터 인덕터 : 90uH,
부하조건: 90%
그림 은 실험 파형이다 출력전압이 부하전류가 비선형적인데도 불구하고 정현파 모양을59
유지 하고 있음을 볼 수 있다.
그림 상 의 고조파 제거 알고리즘 적용한 실험 파형 입력전원그림 상 의 고조파 제거 알고리즘 적용한 실험 파형 입력전원그림 상 의 고조파 제거 알고리즘 적용한 실험 파형 입력전원그림 상 의 고조파 제거 알고리즘 적용한 실험 파형 입력전원59 3 UPS (1:59 3 UPS (1:59 3 UPS (1:59 3 UPS (1:
파형 출력파형 비선형 부하전류파형 출력파형 비선형 부하전류파형 출력파형 비선형 부하전류파형 출력파형 비선형 부하전류, 2: UPS , 3: ), 2: UPS , 3: ), 2: UPS , 3: ), 2: UPS , 3: )
이때의 고조파 분석한 내용은 아래 표 와 같다6 .

- 68 -
표 상 디지털 제어기를 적용한 의 고조파 분석 내용표 상 디지털 제어기를 적용한 의 고조파 분석 내용표 상 디지털 제어기를 적용한 의 고조파 분석 내용표 상 디지털 제어기를 적용한 의 고조파 분석 내용6 3 UPS6 3 UPS6 3 UPS6 3 UPS
는 로 분석되었으며 차와 차 전압이 높은 것으로 분석되었으며 이 부분의 발THD 4.6% 11 13
생요인과 제거에 대해서 좀 더 연구가 진행되어야 할 것으로 보인다.

- 69 -
제 장 목표달성도 및 관련분야에의 기여도제 장 목표달성도 및 관련분야에의 기여도제 장 목표달성도 및 관련분야에의 기여도제 장 목표달성도 및 관련분야에의 기여도4444
지원목표 및 평가착안점에 입각한 지원목표의 달성도 및 관련분야의 기술발전에의 기여도(
등을 기술)
기술지원 항목 및 달성도기술지원 항목 및 달성도기술지원 항목 및 달성도기술지원 항목 및 달성도
지원항목지원내용
비고기술지원前 기술지원後
전압 THD
단상 5.0% 3.14% 측정PM3000A
상3 9.5% 4.7% 측정PM3000A
마이컴을 이용한 고조파
제거 알고리즘- 제공 프로그램
필터설계법 - 제공 특허출원
출력고조파 제거 알고리즘 구현 및 시험용 시제품 제작 및 시험 완료출력고조파 제거 알고리즘 구현 및 시험용 시제품 제작 및 시험 완료출력고조파 제거 알고리즘 구현 및 시험용 시제품 제작 및 시험 완료출력고조파 제거 알고리즘 구현 및 시험용 시제품 제작 및 시험 완료
출력전압 고조파 제거 알고리즘 시험용 시제품 제작 및 시험O
를 사용한 제어기 개발- TMS320F2812 DSP
디지털 오실로스코프를 이용한 파형 측정-
를 이용한 고조파 측정- Universal Power Analyzer PM3000A
고조파 제거항에 따른 전압 의 변화고조파 제거항에 따른 전압 의 변화고조파 제거항에 따른 전압 의 변화고조파 제거항에 따른 전압 의 변화THDTHDTHDTHD
고조파 제거 전압 THD(%)
무보상 9.73
차 제거3 9.63
차 제거5 8.07
차 차 제거3 5 3.16
차 차 차 제거3 , 5 , 7 3.14
특허 출원 국내출원 건특허 출원 국내출원 건특허 출원 국내출원 건특허 출원 국내출원 건: (1 ): (1 ): (1 ): (1 )

- 70 -
제 장 기술지원 결과의 활용계획제 장 기술지원 결과의 활용계획제 장 기술지원 결과의 활용계획제 장 기술지원 결과의 활용계획5555
추가지원의 필요성 타연구에의 응용 기업화 추진방안을 기술( , , )
사업별 특성에 따라 목차는 변경가능함※
기존에 아날로그 제어기를 적용하여 생산되고 있는 제품에 모두 적용가능하다UPS .
단상 UPS
상3 UPS(10kVA~200kVA, 208V~440V)
향후 개발할 태양광 발전용 정현파 전류제어기에 활용할 수 있다PCSDML .
태양광 발전용 단상 PCS
대용량 태양광 발전용 아3T PCS(250 kW)
- 71 -
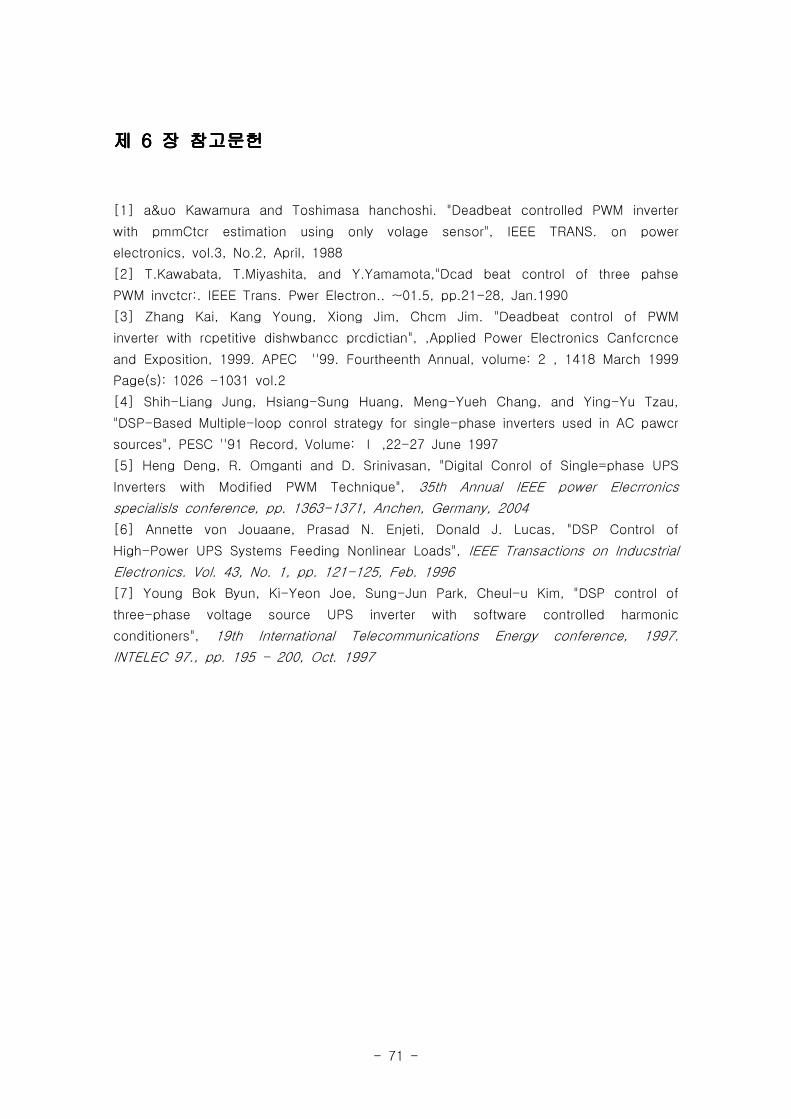
제 장 참고문헌제 장 참고문헌제 장 참고문헌제 장 참고문헌6666
[1] a&uo Kawamura and Toshimasa hanchoshi. "Deadbeat controlled PWM inverter
with pmmCtcr estimation using only volage sensor", IEEE TRANS. on power
electronics, vol.3, No.2, April, 1988
[2] T.Kawabata, T.Miyashita, and Y.Yamamota,"Dcad beat control of three pahse
PWM invctcr:. IEEE Trans. Pwer Electron.. ~01.5, pp.21-28, Jan.1990
[3] Zhang Kai, Kang Young, Xiong Jim, Chcm Jim. "Deadbeat control of PWM
inverter with rcpetitive dishwbancc prcdictian", ,Applied Power Electronics Canfcrcnce
and Exposition, 1999. APEC ''99. Fourtheenth Annual, volume: 2 , 1418 March 1999
Page(s): 1026 -1031 vol.2
[4] Shih-Liang Jung, Hsiang-Sung Huang, Meng-Yueh Chang, and Ying-Yu Tzau,
"DSP-Based Multiple-loop conrol strategy for single-phase inverters used in AC pawcr
sources", PESC ''91 Record, Volume: ,22-27 June 1997Ⅰ
[5] Heng Deng, R. Omganti and D. Srinivasan, "Digital Conrol of Single=phase UPS
Inverters with Modified PWM Technique", 35th Annual IEEE power Elecrronics
specialisls conference, pp. 1363-1371, Anchen, Germany, 2004
[6] Annette von Jouaane, Prasad N. Enjeti, Donald J. Lucas, "DSP Control of
High-Power UPS Systems Feeding Nonlinear Loads", IEEE Transactions on Inducstrial
Electronics. Vol. 43, No. 1, pp. 121-125, Feb. 1996
[7] Young Bok Byun, Ki-Yeon Joe, Sung-Jun Park, Cheul-u Kim, "DSP control of
three-phase voltage source UPS inverter with software controlled harmonic
conditioners", 19th International Telecommunications Energy conference, 1997.
INTELEC 97., pp. 195 - 200, Oct. 1997

- 72 -