fircasiz da motorunun modellenmesi ve pwm yontemiyle kontrolu modelling and controlling of brushless...
TRANSCRIPT

T.C.
YÜZÜNCÜ YIL ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ ANABİLİM DALI
FIRÇASIZ DA MOTORUNUN MODELLENMESİ VE
PWM YÖNTEMİYLE KONTROLÜ
YÜKSEK LİSANS TEZİ
HAZIRLAYAN: Özkan ATAN DANIŞMAN : Doç. Dr. Nihat İNANÇ
VAN–2007

T.C.
YÜZÜNCÜ YIL ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ ANABİLİM DALI
FIRÇASIZ DA MOTORUNUN MODELLENMESİ VE
PWM YÖNTEMİYLE KONTROLÜ
YÜKSEK LİSANS TEZİ
HAZIRLAYAN: Özkan ATAN
VAN–2007


I
ÖZET
FIRÇASIZ DA MOTORUNUN MODELLENMESİ VE
PWM YÖNTEMİYLE KONTROLÜ
ATAN, Özkan
Yüksek Lisans Tezi Elektrik-Elektronik Mühendisliği Anabilim Dalı
Tez Danışmanı: Doç. Dr. Nihat İNANÇ
Kasım 2007 63 sayfa
Bu çalışmada; fırçasız doğru akım (DA) motorunun darbe genişliği modülasyonu (PWM)
yöntemiyle hız ayarı simülasyon ve uygulama olarak gerçekleştirilmiştir. Sistemin temelinde,
motora uygulanan gerilimin kontrollü bir şekilde anahtarlanması yatmaktadır. Bu nedenle, PWM
yönteminin fırçasız DA motorunun üzerindeki etkisi, simülasyon ve uygulama yapılarak
gözlenmiştir. Ayrıca simülasyonda; oransal integral ve türev (PID) tipi bir kontrolör ile hız kontrolü
yapılarak akım, gerilim, moment ve hız değişimi incelenmiştir. Uygulamada ise; kontrolör olarak
bir kişisel bilgisayar (Personal Computer-PC) ve PC’ nin paralel portuna bağlı bir sürücü
tasarlanmıştır. PWM yöntemiyle fırçasız DA motorunun kontrolü ve hız ayarının oldukça
ekonomik ve etkin olduğu gösterilmiştir. PWM yönteminde yüksek frekanslı osilasyonlar
gözlenmesi tek dezavantaj olarak gözlenmiştir. Bu dezavantajın yüksek frekans filtreleriyle
giderilebileceği düşünülmektedir.
Anahtar Kelimeler: Fırçasız DA motor, PWM, PID

II

III
ABSTRACT
MODELLING AND CONTROLLING OF BRUSHLESS DC MOTOR
BY USING PWM METHOD
ATAN, Özkan
M.Sc. Electrical-Electronics Engineering Science
Supervisor: Assoc. Prof. Dr. Nihat İNANÇ
November 2007 63 pages
In this study, the speed adjustment of brushless DC motor has been realized both application
and simulation by PWM method. The system is based upon the switching of the voltage made on
the motor in a controlling way. That’s why the effect of the PWM method on brushless DC motor
has been observed by through application and simulation. Besides, the speed control has been
realized with a PID type controller during simulation and current, voltage, torque and the speed
values have been checked by this method. A PC as a controller and driver connected with the
paralel port of PC have been designed for the application. The application and simulation studies
have shown that it’s quite economical and effective to control the brushless DC motor and to make
its speed adjustment by this method. The fact that high frequency oscilations have been observed is
the only drawback of this method. But, it is though that this can be prevented by means of high
frequency filter methods.
Key Words: Bruhless DC Motor, PWM, PID

IV

V
ÖNSÖZ
Bu çalışmada; yüksek verimli özel elektrik motorlarından olan fırçasız DA motorunun,
kullanımını arttıracak, basit bir sürücü ve kontrol sistemi tasarlanmıştır. Bu tasarım; elektrik
motorlarının ekonomik olarak kullanımını arttırarak, üstün özelliklerinden yararlanmamızı yardımcı
olacaktır.
Bu alandaki çalışmalara beni yönlendiren ve destekleyen danışmanım, Doç. Dr. Nihat
İNANÇ Hocam’ a teşekkür ederim.
Ayrıca bölümdeki çalışmalarım sırasında yardımlarını esirgemeyen başta Prof. Dr.
Sabir RÜSTEMLİ’ ye ve Yrd. Doç. Dr. M. Nuri ALMALI’ ya, Murat Yılmaz, Ferit DİNÇADAM
ve eğitim hayatım boyunca beni destekleyen ailem ve arkadaşlarıma teşekkürü bir borç bilirim

VI

VII
İÇİNDEKİLER
sayfa
ÖZET I
ABSTRACT III
ÖNSÖZ V
İÇİNDEKİLER VII
ŞEKİLLER DİZİNİ IX
ÇİZELGELER DİZİNİ XI
EKLER DİZİNİ XIII
SİMGELER VE KISALTMALAR XV
1. GİRİŞ 1
2. KAYNAK BİLDİRİŞLERİ 3
3. MATERYAL ve YÖNTEM 5
3.1. Fırçasız DA Motor 5
3. 1. 1. Yapısı 5
3.1.1.1 Stator 6
3.1.1.2. Rotor 6
3.1.1.3. Konum sensörü 7
3.1.1.4 Sürücü sistemleri 9
3.1.2. Çalışma prensibi 13
3.1.3. FDAM’ unun matematiksel ve elektriksel eşdeğer devresi 15
3.2. Mekanik Sistemlerin Matematiksel Modeli 18
3.3. Darbe Genişlik Modülasyonu (Pulse Width Modulation-PWM) 19
3.3.1. PWM yönteminin avantaj ve dezavantajları 21
3.3.2. PWM yönteminin matematiksel ve elektriksel eş değeri 22
3.4. Kontrol Yöntemleri 23
3.4.1. Oransal, integral ve türev tipi kontrolör (PID) 23

VIII
3.4.1.1. Oransal tip (P) kontrolör 23
3.4.1.2. Oransal integral tipi kontrolör (PI) 24
3.4.1.3. Oransal türev kontrol (PD) 25
3.4.1.4. Oransal-integral-türev (PID) tipi kontrolör 25
3.5. Paralel Port 26
Paralel port pinleri üç gruba ayrılır. Bunlar: giriş, çıkış ve kontrol pinleridir. 27
3.5.1. Giriş (status) pinleri 27
3. 5. 2. Çıkış (data) pinleri 28
3.5.2.1. Kuplaj devresi 29
3.5.3. Kontrol portu 29
3.6. Paralel Portun Kuplaj Devreleri ve Sürücü ile Bağlantısı 29
4. BULGULAR 31
4.1. FDAM’ unun PWM Yöntemiyle Hız Ayarı 31
4.2. FDAM’ unun PID Yöntemiyle Kontrolü 32
4.3. FDAM’ unun Hız Kontrol Simülasyonu ve Uygulaması 33
4.3.1. Simülasyon 33
4.3.2. Uygulama 49
5. TARTIŞMA ve SONUÇ 56
KAYNAKLAR 58
EKLER 59
ÖZGEÇMİŞ 63

IX
ŞEKİLLER DİZİNİ
sayfa
Şekil 3. 1. FDAM’ unun genel yapısı. 5
Şekil 3. 2. Farklı kutuplu stator yapıları. 6
Şekil 3. 3. İki ve dört kutuplu rotor yapısı. 6
Şekil 3. 4. Hall Effect sensörünün yapısı. 7
Şekil 3. 5. İki ve dört kutuplu motorda hall sensörlerinin konumu. 8
Şekil 3. 6. Sıfır geçiş dedektörünün yapısı ve bağlantısı. 8
Şekil 3. 7. MOSFET' lerle yapılmış sürücü devresi. 9
Şekil 3. 8. MOSFET' lerin iç yapısı ve sembolü. 10
Şekil 3. 9. Güç MOSFET' ünün sembolü. 10
Şekil 3. 10. MOSFET' lerin karakteristik eğrisi. 10
Şekil 3. 11. PNP ve NPN tipi transistörlerin sembolü ve iç yapısı. 11
Şekil 3. 12. Transistörlerin karakteristik eğrisi. 11
Şekil 3. 13. Tristörün sembolü, yapısı ve tristör eşdeğer devresi. 12
Şekil 3. 14. IGBT' ünün sembolü ve karakteristik eğrisi. 12
Şekil 3. 15. FDAM' unun sürücü devre ile bağlantısı. 13
Şekil 3. 16. Sürücü anahtarlarının bağlantısı. 13
Şekil 3. 17. FDAM' unun sargılarından geçen akımın yönü ve rotor konumu. 14
Şekil 3. 18. FDAM' unun bobinlerinin bağlantısı. 15
Şekil 3. 19. FDAM' un bir faz eşdeğer devresi. 15
Şekil 3. 20. Zıt EMK değişimi eğrisi. 16
Şekil 3. 21. Faz sargılarında indüklenen zıt EMK' nın konuma göre değişimi. 17
Şekil 3. 22. Seri ayarlı direnç ile gerilim ayarı. 19
Şekil 3. 23. Oto transformatörü ile gerilim değişimi. 19
Şekil 3. 24. PWM yönteminin basit anahtar yapısı. 20
Şekil 3. 25. Taşıyıcı sinyal ve kontrol sinyalinin değişimi. 20
Şekil 3. 26. Taşıcı sinyal ile kontrol sinyalinin karşılaştırılması sonucu oluşan darbe yapısı. 21
Şekil 3. 27. Farklı darbe genişliğinde gerilim elde edilebilmesi için OPAMP bağlantısı. 22
Şekil 3. 28. P tipi Kontrolörün OPAMP eşdeğeri. 23
Şekil 3. 29. PI tipi Kontrolörün OPAMP ile tasarımı. 24
Şekil 3. 30. PD tipi kontrolörün OPAMP' lı yapısı. 25
Şekil 3. 31. PID tipi Kontrolörün OPAMP ile tasarımı. 26
Şekil 3. 32. Paralel portun yapısı. 27

X
Şekil 3. 33. Paralel porta veri giriş işlemi ve anahtar bağlantı şeması. 28
Şekil 3. 34. Veri çıkış işlemi için paralel port bağlantısı. 28
Şekil 3. 35. Optokouplörün iç yapısı ve bağlantı şekli. 29
Şekil 3. 36. Sensörlerin ve sürücünün optokuplör ile porta bağlantısı. 30
Şekil 4. 1. Farklı darbe genliğine sahip gerilim şekilleri. 31
Şekil 4. 2. PID ile hız kontrolörünün blok şeması. 32
Şekil 4 3. FDAM' un kontrolsüz a) hız ve b)moment grafiği. 34
Şekil 4. 4. Kontrolsüz çalışmada gerilim zaman grafiği. 35
Şekil 4. 5. Kontrolsüz çalışmada akım zaman grafiği. 36
Şekil 4. 6. PWM yöntemiyle Vc=5V için hız moment grafiği. 37
Şekil 4. 7. PWM yöntemiyle kontrol edilen motorun Vc=5V için gerilim zaman grafiği. 38
Şekil 4. 8. PWM Yöntemiyle Kontrol edilen motorun cV =5V için akım zaman grafiği. 39
Şekil 4. 9. PWM Yöntemiyle Kontrol edilen motorun cV =2V için a) hız ve b) moment grafiği. 40
Şekil 4. 10. PWM Yöntemiyle kontrol edilen motorun cV =2V için gerilim zaman grafiği. 41
Şekil 4. 11. PWM Yöntemiyle kontrol edilen motorun cV =2V için akım zaman grafiği. 42
Şekil 4. 12. ω=1000d/d, P=0.05, iT =10, DT =0.05, LT =0N.m için a)hız ve b)moment grafiği. 43
Şekil 4. 13. ω=1000d/d, iT =10, DT =0.05, LT =0 N.m için gerilim zaman grafiği. 44
Şekil 4. 14. ω=1000d/d, iT =10, DT =0.05, LT =0 N.m, için akım zaman grafiği. 45
Şekil 4. 15. ω=1000 d/d ve LT =0.5 N.m için a)hız ve b)moment grafiği. 46
Şekil 4. 16. ω=1000 d/d ve LT =0.5 N.m’ lik yükle yüklü olduğu durumda gerilim grafiği. 47
Şekil 4. 17. ω=1000 d/d ve LT =0.5 N.m’ lik yükle yüklü olduğu durumda akım grafiği. 48
Şekil 4. 18. FDAM’ nun hız kontrol uygulama düzeneği. 49
Şekil 4. 19. FDAM'unun PWM ile hız ayarını yapan programın ekran görüntüsü. 50
Şekil 4. 20. FDAM' unun kontrolsüz çalışmada fazlara uygulanan gerilimin değişimi. 51
Şekil 4. 21. FDAM' unun kontrolsüz çalışmada faz sargılarından geçen akımın değişim şekli. 52
Şekil 4. 22. FDAM' unun PWM ile kontrolünde 5=cV V için uygulanan gerilimin değişimi. 53
Şekil 4. 23. FDAM' unun PWM ile kontrolünde 5=cV V için motorun çektiği akımın değişimi. 53
Şekil 4. 24. FDAM' unun PWM ile kontrolünde 0=cV V için uygulanan gerilimin zamana
göre değişimi. 54
Şekil 4. 25. FDAM' unun PWM ile kontrolünde 0=cV V için motorun çektiği akımın
osilaskop çıktısı. 55

XI
ÇİZELGELER DİZİNİ
sayfa
Çizelge 3. 1. Sensör bilgisine ve rotor konumuna karşılık gelen anahtar durumları 14

XII

XIII
EKLER DİZİNİ
sayfa
Ek 1 Simülasyon Komutları 59
Ek 2 Uygulama Komutları 62

XIV

XV
SİMGELER VE KISALTMALAR
Simgeler: B: Sürtünme katsayısı (Nm.s/rad)
ea: a Fazında indüklenen zıt elektromotor kuvveti (V)
eb: b Fazında indüklenen zıt elektromotor kuvveti (V)
ec: c Fazında indüklenen zıt elektromotor kuvveti (V)
H:Manyetik Alan Yoğunluğu
I: Akım (A)
Imax: Akımın maksimum değeri (A)
i(t): Akımın değişim fonksiyonu
ia: a Fazından geçen akım (A)
ib: b Fazından geçen akım (A)
ic: c Fazından geçen akım (A)
J: Atalet moment sabiti (N.m.s/rad)
La: a fazının İndüktansı (H)
Lb: b fazının İndüktansı (H)
Lc: c fazının İndüktansı (H)
M: Ortak indüktans (H)
Pe: Motorun ürettiği güç (W)
R: Direnç (Ω)
Ra: a Fazının direnci (Ω)
Rb: b Fazının direnci (Ω)
Rc: c Fazının direnci (Ω)
TD: Türev zaman sabiti
Te: Motorun ürettiği moment (N.m)
Ti: İntegral zaman sabiti
TL: Yük Momenti (N.m)
ton: Anahtarın iletimde olduğu süre (s)
toff: Anahtarın kesimde olduğu süre (s)
U: Uygulanan Gerilim (V)
Ua: a Fazına uygulanan gerilim (V)
Ub: b Fazına uygulanan gerilim (V)
Uc: c Fazına uygulanan gerilim (V)
Vç: Çıkış Gerilimi (V)

XVI
Vg: Giriş Gerilimi (V)
ωg: Referans Hız değeri (d/d)
ωç: Hız çıkış değeri (d/d)
ω: Açısal Hız (rad/s)
θ: Konum değeri (rad)
λ: Zıt EMK sabiti
λa: a Fazında indüklenen zıt elektromotor kuvvetinin hızdan bağımsız değişim fonksiyonu
λb: b Fazında indüklenen zıt elektromotor kuvvetinin hızdan bağımsız değişim fonksiyonu
λc: c fazında indüklenen zıt elektromotor kuvvetinin hızdan bağımsız değişim fonksiyonu
λ max: Motorda indüklenen zıt elektromotor kuvvetinin hızdan bağımsız alacağı maksimum değer
Kısaltmalar: AA: Alternatif Akım
DSP: Dijital Sinyal İşlemci
EMK: Elektro Motor Kuvvet
e(t): Referans hız değeri ile çıkış hızı arasındaki hatanın değişim fonksiyonu
FDAM: Fırçasız Doğru Akım Motoru
Kp: Oransal kazanç sabiti
MOSFET: Metal-Oksit Yarı iletkenli Alan Etkili Transistör
N1: 1. Fazın Sargı Sayısı
N2: 2. Fazın Sargı Sayısı
OPAMP: İşlemsel yükselteç
PID: Oransal- İntegral ve Türev Kontrol
PWM: Darbe Genişlik Modülasyonu
SCR: Yarı iletken Kontrollü Doğrultucu
SMSM: Sabit Mıknatıslı Senkron Motor
VTmax: Taşıyıcı sinyalin alacağı maksimum değer
VTmin: Taşıyıcı sinyalin alacağı minimum değer
IGBT: Kapı yalıtımlı bipolar transistör (Insulate Gate Bipolar Transistor)

XVII
1. GİRİŞ
Fırçasız doğru akım motoru (FDAM); özel elektrik makinelerinden olup, senkron motor
sınıfındandır. Rotoru sabit mıknatıstan meydana gelen bu motor, yapı olarak senkron makinelere
benzemektedir. Sabit mıknatıslı motorlar; gürültüsüz çalışmaları, yüksek verimli olmaları, bakım
gerektirmemeleri ve uzun ömürlü olmaları gibi avantajlara sahiptir. Ancak bu motorlar; yüksek
frekanslı osilasyonlara neden olmaları, belli bir gücün üzerinde üretilememeleri, sürücü ve konum
sensörü gerektirmeleri, yüksek maliyetli olmaları gibi dezavantajlara sahiptir. Bu nedenle; özel
uygulamalar dışında pek kullanılmamışlardır. Son yıllarda elektronik sürücülerin ve kontrolörlerin
ucuzlaması bu motorların kullanımını arttırmıştır.
Fırçasız DA motorunun sargılarında oluşan zıt elektromotor kuvvet (EMK), sabit mıknatıslı
senkron motorların aksine yamuk şeklindedir. Bu nedenle, bu motorlar ayrı bir şekilde
adlandırılmıştır. Zıt EMK farkı, FDAM’ unun ağırlık/güç oranında %25’ lik bir artış sağlamaktadır.
Bu sayede FDAM’ larının kullanımı, diğer sabit mıknatıslı senkron motorlardan daha fazladır. Zıt
EMK’ nın değişiminin yamuk dalga şeklinde olmasından dolayı, bu motorların matematiksel
modeli lineer değildir. Lineer olmayan yapı, bu motorların analizini zorlaştırır.
FDAM’ larının kontrolünde kullanılan yöntemlerden biri olan darbe genişlik modülason
(PWM) yöntemi; bir sabit kaynağın anahtarlanması ile farklı darbe genişliğinde gerilim elde etme
yöntemidir. Bu darbe genişliği; anahtarın açık olma süresinin, açık ve kapalı olma sürelerinin
toplamına bağlı olarak değişir. Bu işlem, anahtarın kapalı olma süresi veya periyot değiştirilerek
yapılır. Hızlı anahtarlama elemanları üretilmeden önce, gerilim ayarı devreye seri bir direnç
bağlanarak veya bir oto transformatörü ile yapılırdı. Seri bağlı direnç yönteminde; seri ayarlı
direncin değeri değiştirilerek, çıkışında farklı gerilim elde edilirdi. Oto transformatöründe ise; çıkışı
ayarlı bir oto transformatörü kullanılırdı. Bu yöntem de ekonomik bir yöntem değildir. PWM
yönteminde; farklı darbe genişliğinde gerilim elde edebilmek için, sabit bir sinyal ile periyodik
olarak değişen yüksek frekanslı taşıyıcı sinyal ( testere dişli dalga veya üçgen dalga) karşılaştırılır.
Bu karşılaştırma işleminden elde edilen sonuca göre, anahtar açılır veya kapatılır. Bu
şekildeki bir işlem, yüksek frekanslı anahtarlama hızına sahip yarı iletken anahtarlarla ve
mikroişlemci tabanlı sürücülerle gerçekleştirilir. Bu nedenle, yüksek anahtarlama hızına sahip yarı
iletken teknolojisinin gelişmesi, özellikle motor kontrol sistemlerini hızla geliştirmiştir.
Yarı iletken teknolojisinin önemli elemanlarından olan metal oksitli alan etkili transistörler
(MOSFET’ ler); yüksek anahtarlama hızına sahip, yarı iletken anahtarlama elemanlardır. Bu
elemanlarla, yüksek frekanslı sürücüler yapılabilinir. MOSFET’ ler, kapılarına sadece gerilim
uygulanarak sürme işlemi gerçekleştiren elemanlardır. Transistörler gibi, kapı akımları

2
çekmedikleri için sürücü devresi basit ve oldukça hızlıdır. Ancak, MOSFET’ ler iletimdeyken iç
dirençlerinin büyük olmasından dolayı, iletim kayıpları fazladır.
Günümüzde, kontrol işlemi için oldukça fazla yöntem vardır. Bu yöntemlerin en fazla
kullanılanı PID kontrolüdür. Bu kontrolör, tek giriş ve tek çıkışlı sistemlerin kontrolü için yeterli bir
çözüm sunmaktadır. PID kontrolör, istenen çıkış değeri ile gerçek çıkış değerini karşılaştırır. Bunun
sonucunda; hatanın integrali, türevi ve belli bir katsayı ile çarpılmış hali toplanarak çıkışa aktarılır.
Sonuç olarak, sistemin istenen değerde çalışması sağlanır.
Bu çalışmada; yüksek verimli FDAM’ larının kullanım alanını genişletmek için minimum
donanımla hız ayarı ve kontrolü gerçekleştirilmiştir. Bu kontrol işlemi PWM yöntemiyle sürücü
tarafından yapılmıştır. Bu şekilde ekonomik ve verimli bir kontrol ve ayar işlemi gerçekleştirilir.

2. KAYNAK BİLDİRİŞLERİ
Sabit mıknatıslı fırçalı motorun zayıflıkları fırçasız DA motorlarının, servo motor olarak
satışlarını artırmıştır. Fırçasız motorlarda mekanik komitasyonun yerini, elektronik komitasyon
almıştır. Bu, fırçalar ve bunların getirdiği problemleri ortadan kaldırmıştır (Ellis, 2000).
Sabit mıknatıslı senkron motorlar (SMSM) alternatif akım sürücü kategorisindedir. Fırçasız
DA motorlar genel olarak robotlarda kullanılır. Bu motorlarda bulunan konum sensörü ve sürücü,
robotik alanında kullanımını ekonomik ve verimli kılmaktadır. Sürücü ve sensörlerin olması bu
motorları ekonomik olarak her yerde kullanımını kısıtlamaktadır (Utkin ve ark., 1999).
Son yıllarda, sabit mıknatıslı motor çeşitleri endüstride önemli bir yer edinmiştir. Sabit
mıknatıs maddelerinin özelliklerindeki gelişme, sabit mıknatıslı motor ve fırçasız DA motorlarının
kullanımını arttırmıştır. Her iki motorda da sabit moment üretimi için alternatif stator akımına ve
rotor akı pozisyonuna ihtiyaç vardır (Ertuğrul ve Acarnley, 1994).
Fırçasız DA motorları; konum kontrol sistemlerinde yüksek moment ağırlık oranına sahip
olmaları, bilgisayar kontrolüne olanak vermeleri, yüksek verimli olmaları, gürültüsüz çalışmaları ve
komitatör bakımı gerektirmediği için geniş bir kullanım alanına sahiptir (Hashimoto ve ark., 1988).
Yarı iletken teknolojisinden yararlanılarak yapılan inverterler ve bunun paralelinde farklı
darbe genişlik modülasyon tekniklerinin geliştirilmesiyle, statik güç dönüştürücüleri ortaya çıkmış
ve birçok alanda kullanılmaya başlanmıştır (Tuncer ve Tatar, 2004).
Elektrik gücünün hızlı ve verimli bir şekilde kontrolü, modern otomasyon üretimi olan bir
anahtar yapısı ile elde edilir. Konvertörler, anahtarların hızlı bir şekilde açılıp kapatılmasıyla,
enerjiyi bir kaynaktan kontrollü bir şekilde transfer eder (Bose, 1997).
PWM; elektrik gücünün verimli ve hızlı kontrolü için, modern otomasyon ürünü olan bir
anahtar teknolojisinden oluşturulur. Bu işlem, elektronik güç dönüştürücüleri tarafından yerine
getirilir. Bu dönüştürücüler tarafından; enerji bir kaynaktan (yarı iletken anahtarların belirli formda
açık ve kapalı olarak hızlı şekilde anahtarlanmasıyla), kontrol edilen sisteme aktarılır (Bose, 1997).
FDAM’ unun akım kontrolü için çok çeşitli yöntemler vardır. Bunlar sağladıkları
avantajların yanında birçok dezavantaja sahiptir. En temel dezavantajı sürekli durumda oluşturduğu
yüksek frekanslı gürültüdür. Bu gürültü anahtarlama frekansına bağlıdır (Chen ve Tang, 1999).
Günümüz teknolojisinde güç denetimi, elektronik devrelerle yapılmaktadır. Elemanların
küçük boyutta olması, ömürlerinin uzun olması, otomasyonda bilgisayar denetimine imkân vermesi
gibi birçok avantajdan dolayı elektronik denetim tercih edilmektedir (Abut, 2001).
Mikroişlemciler geliştirilmeden önce, veri toplama ve kontrol işlemi insanlar tarafından
yapılıyordu. Karmaşık kontrol işlemlerinin, hızlı ve kaliteli olarak yapılmak istenmesiyle, bilgisayar
temelli işlemciler kullanılmaya başlandı (Rigby ve Dalby, 1995).

4
PC paralel portu kullanılarak, birçok güç elektroniği devresi gerçekleştirmek mümkündür.
Bu sayede DA ve AA sürücüler çalıştırılabilir. Özellikle yüksek maliyetli DSP kartları ve ticari
sürücüler kullanmaksızın, modern AA’ın uygulamaları yapılabilir (Duru ve Arı, 2005).
Günümüzde kontrol sistemlerinin tasarımına ilişkin çok sayıda çözüm sunulmasına karşın,
PID kontrolörü hala endüstriyel kontrol sistemlerinin en yaygın kullanılan kontrolör türüdür. Bunun
nedeni; bu kontrolörün endüstriyel sistemlerin büyük çoğunluğunu oluşturan bir giriş ve bir çıkışlı
sistemler için çoğu kez yeterli çözümler vermesidir (Kurtulan,2001).

3. MATERYAL ve YÖNTEM
Bu çalışmada FDAM’ unun hız ayar ve kontrolü yapılmıştır. Yapılan çalışma simülasyon ve
uygulama olarak iki aşamada yapılmıştır. Simülasyon çalışmasında MATLAB programı
kullanılmıştır. Programda diferansiyel denklemlerin çözümünde 4. dereceden Runge Kutta yöntemi
kullanılmıştır. Bu çalışmada, PWM’ li çalışma ve PID ile hız kontrolü işlemi simüle edilmiş PWM
yöntemi uygulanarak akım ve gerilim değişimi elde edilmiştir.
3.1. Fırçasız DA Motor
FDAM’ u, sabit mıknatıslı motor grubundandır. Bu motorların senkron hızda dönmeleri,
fırça ve kollektörlerinin olmaması kullanım alanlarını genişletmiştir. Özellikle yanıcı ve patlayıcı
maddelerin bulunduğu ortamda, güvenli bir şekilde kullanılmaktadırlar. Fırça ve kollektörün
bulunmaması nedeniyle de periyodik bakım gerektirmezler.
FDAM’ ları, kendi sınıfından olan sabit mıknatıslı senkron motorlara göre, güç/ağırlık oranı
bakımından %25 daha avantajlıdır. Bu oran; aynı boyutta üretilen FDAM’ unun SMSM’ dan %25
daha fazla güç ürettiği anlamına gelir. Bu nedenle, fırçasız DA motorunun kullanımı her geçen gün
artmaktadır. Dört kutuplu bir FDAM’ un yapısı Şekil 3.1’ de görülmektedir.
3. 1. 1. Yapısı
FDAM’ lar; üç adet faz sargısının bulunduğu stator, sürekli mıknatıstan oluşan bir rotor,
konum sensörü ve sürücüden meydana gelir. Burada faz sargılarının sarıldığı stator çıkıklarının
sayısı, kutup sayısı ile doğru orantılıdır. Motor; stator, rotor ve konum sensörü ve sürücü sistemleri
olarak dört ana kısımdan oluşmaktadır.
Şekil 3. 1. FDAM’ unun genel yapısı.

6
3.1.1.1 Stator
Faz sargılarının sarıldığı motorun durağan kısmıdır. Stator, demir kayıplarını azaltmak için
silisli saçlardan yapılmıştır. Stator sargılarının sarıldığı çıkık sayısı, çift kutup sayısının 3 katına
eşittir. İki ve dört kutuplu stator yapıları Şekil 3.2’ de görülmektedir.
Statorun boyutları, motorun gücüne bağlı olarak değişmektedir. Güç arttığı zaman, motorun
üzerinden geçen akım ve buna bağlı olarak kablo kesiti artar. Artan kablo kesiti, sargıların sarıldığı
statorun boyutlarının büyümesine neden olur.
3.1.1.2. Rotor
Sabit mıknatıstan oluşan ve motorun dönen kısmıdır. Rotorun sabit mıknatıstan yapılmış
olması, motorda kollektör ve fırça kullanılmadığı anlamına gelir. Bunun sonucu olarak da ark olayı
olmaz, bakım gerektirmez ve sürtünme kayıpları azalır. İki ve dört kutuplu rotor yapısı Şekil 3.3’de
görülmektedir.
Rotorda kullanılan sabit mıknatıs galyum, samaryum veya ferritten yapılmış olabilir. Bu
malzemelerin pahalı olması ve zamanla bu özelliklerini yitirmesi, dezavantajları arasındadır. Sabit
mıknatıs için kullanılan malzemeler aşağıda verilmiştir.
Şekil 3. 2. Farklı kutuplu stator yapıları.
Şekil 3. 3. İki ve dört kutuplu rotor yapısı.
7
Samaryum Kobalt: Samaryum ve kobalt alaşımından oluşan bu malzeme, yüksek manyetik
yoğunluğa sahip ve B-H karakterleri oldukça düzgündür. Bu nedenle, kullanım oranı oldukça
fazladır. Ancak, yeryüzünde fazla bulunmayan kobalt ve samariyum maddelerinden yapılmasından
dolayı, oldukça pahalıdır. Bu nedenle, araştırmacılar farklı arayışlar içine girmişlerdir.
Neodiyum Demir Bor: Neodiyum, demir ve bor alaşımından oluşmuştur. Bu manyetik malzeme,
samariyum kobalttan ucuz olması ve B-H karakterinin iyi olması gibi avantajlara sahiptir.
Ferrit Seramik: Doğada oldukça fazla olmasından dolayı ucuzdur. Manyetik özelliklerini
yitirmemesi, bu malzemelerin kullanımını arttırmıştır. Ancak, kırılgan olmaları ve B-H
karakterlerinin iyi olmaması bu malzemelerin dezavantajlarındandır.
3.1.1.3. Konum sensörü
FDAM’ unun çalışması için konum sensörüne ihtiyaç vardır. Bu sensörlerin uygulamacılara
ekstra maliyet oluşturmasını saymazsak, hassas uygulamalarda bir avantaj olabilir. Rotorun konum
bilgisini işlemciye göndererek, stator sargılarının düzgün olarak tetiklenmesini sağlar. Burada
kullanılan konum sensörü, çok çeşitli olabilir. En yaygın olanı ise, hall effect sensörüdür. Bunun
dışında sıfır geçiş dedektörü ve enkoder da kullanılır.
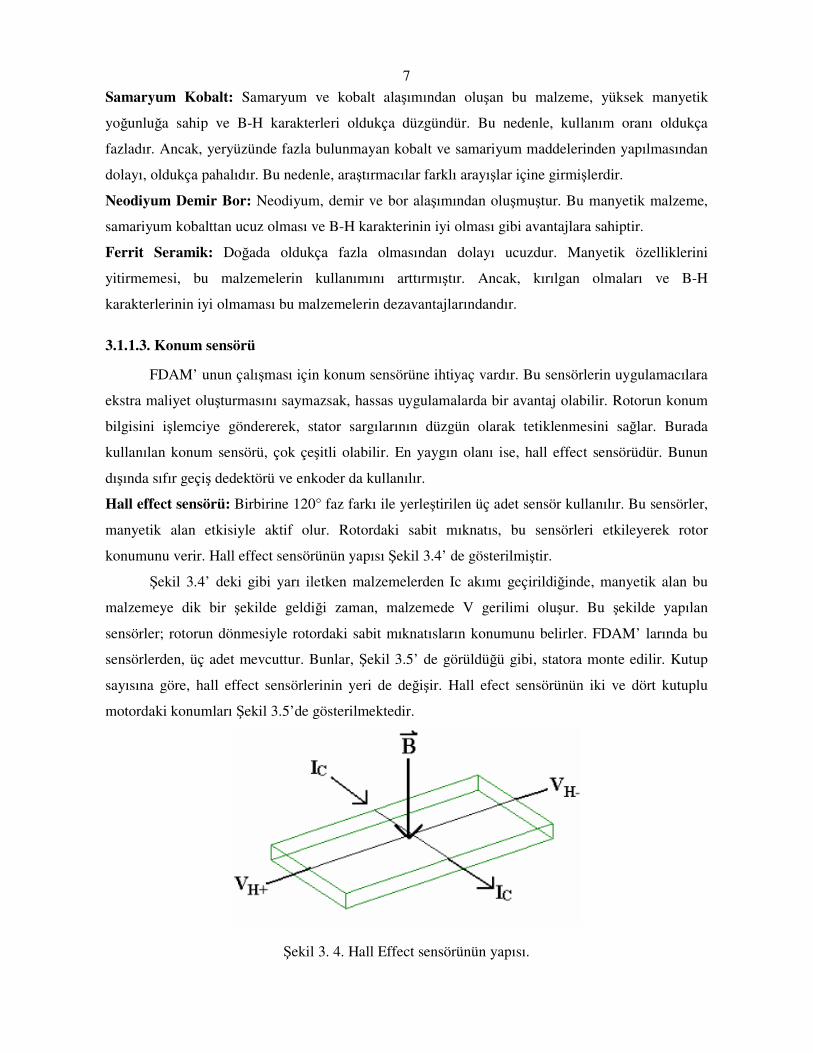
Hall effect sensörü: Birbirine 120° faz farkı ile yerleştirilen üç adet sensör kullanılır. Bu sensörler,
manyetik alan etkisiyle aktif olur. Rotordaki sabit mıknatıs, bu sensörleri etkileyerek rotor
konumunu verir. Hall effect sensörünün yapısı Şekil 3.4’ de gösterilmiştir.
Şekil 3.4’ deki gibi yarı iletken malzemelerden Ic akımı geçirildiğinde, manyetik alan bu
malzemeye dik bir şekilde geldiği zaman, malzemede V gerilimi oluşur. Bu şekilde yapılan
sensörler; rotorun dönmesiyle rotordaki sabit mıknatısların konumunu belirler. FDAM’ larında bu
sensörlerden, üç adet mevcuttur. Bunlar, Şekil 3.5’ de görüldüğü gibi, statora monte edilir. Kutup
sayısına göre, hall effect sensörlerinin yeri de değişir. Hall efect sensörünün iki ve dört kutuplu
motordaki konumları Şekil 3.5’de gösterilmektedir.
Şekil 3. 4. Hall Effect sensörünün yapısı.
8
Şekil 3. 5. İki ve dört kutuplu motorda hall sensörlerinin konumu.
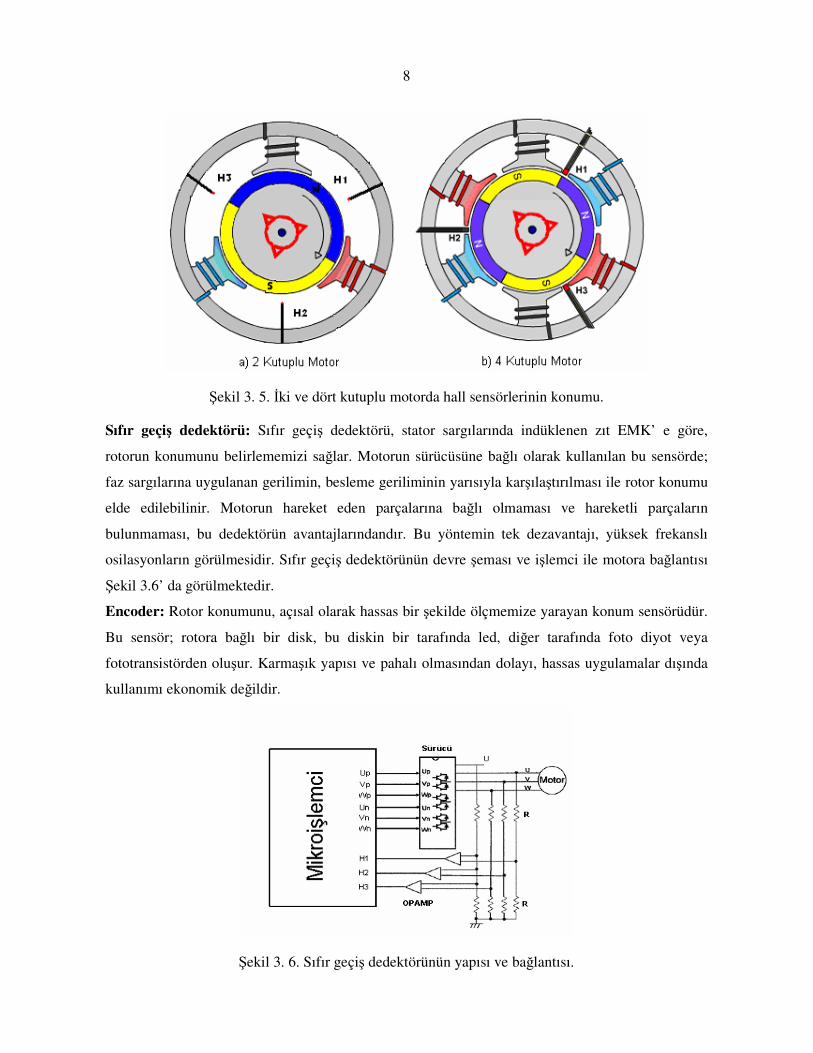
Sıfır geçiş dedektörü: Sıfır geçiş dedektörü, stator sargılarında indüklenen zıt EMK’ e göre,
rotorun konumunu belirlememizi sağlar. Motorun sürücüsüne bağlı olarak kullanılan bu sensörde;
faz sargılarına uygulanan gerilimin, besleme geriliminin yarısıyla karşılaştırılması ile rotor konumu
elde edilebilinir. Motorun hareket eden parçalarına bağlı olmaması ve hareketli parçaların
bulunmaması, bu dedektörün avantajlarındandır. Bu yöntemin tek dezavantajı, yüksek frekanslı
osilasyonların görülmesidir. Sıfır geçiş dedektörünün devre şeması ve işlemci ile motora bağlantısı
Şekil 3.6’ da görülmektedir.
Encoder: Rotor konumunu, açısal olarak hassas bir şekilde ölçmemize yarayan konum sensörüdür.
Bu sensör; rotora bağlı bir disk, bu diskin bir tarafında led, diğer tarafında foto diyot veya
fototransistörden oluşur. Karmaşık yapısı ve pahalı olmasından dolayı, hassas uygulamalar dışında
kullanımı ekonomik değildir.
Şekil 3. 6. Sıfır geçiş dedektörünün yapısı ve bağlantısı.

9
3.1.1.4 Sürücü sistemleri
Rotor konum bilgisine göre, stator sargılarından geçen akımın yönünü değiştirerek rotorun
dönmesini sağlar. İşlemci; kendi çıkışına bağlı olan 6 adet anahtara, bu sensörlerden aldığı bilgiye
göre, açma ve kapama sinyali gönderir. Anahtar olarak MOSFET’ lerin kullanıldığı bir sürücü
devresi Şekil 3.7’ de gösterilmektedir.
Bu anahtarlar, rotorun konumuna göre sırasıyla tetiklenir. Sürücünün tetiklenmesini
sağlayan işlemci, rotora bağlı bir konum sensöründen aldığı bilgiye göre; 1. faza pozitif gerilim, 2.
faza negatif gerilim uygular ve üçüncüsüne ise herhangi bir gerilim uygulamaz. Uygulanan bu
gerilim, sistematik olarak her faz için ayrı ayrı uygulanır. Böylelikle işlemci; yarı iletken anahtar ve
konum sensöründen oluşan sürücü devresiyle, motorda dönme momenti oluşturur. Motorun
performansını etkileyen en önemli eleman, sürücüdür. Sürücünün performansı da işlemci ve
anahtarlara bağlıdır.
Sürücü sistemlerinde kullanılan, en önemli devre elemanı anahtarlardır. Bu anahtarların;
anahtarlama hızı, anahtarlanma kayıpları, iletim kayıpları gibi özelikleri göz önünde bulundurularak
seçim yapılır. Genelde kullanılan anahtar MOSFET’ tir. Ancak, MOSFET’ ler dışında, yarı iletken
malzemeden yapılan anahtarlar da kullanılabilinir (tristör, transistör ve IGBT gibi).
MOSFETLER: Yüksek hızlı anahtarlama elamanlarıdır. MOSFET’ lerin sembolü ve yapısı Şekil
3.8’ de görülmektedir.
Şekil 3. 7. MOSFET' lerle yapılmış sürücü devresi.

10
Şekil 3. 8. MOSFET' lerin iç yapısı ve sembolü.
Bu anahtarların gate ucu yalıtılmış olduğundan, elektrik alanı etkisiyle iletime geçerler.
Kapı akımı çekmedikleri için, sürücüleri basit ve hızları yüksektir. MOSFET’ lerin drain ile source
uçları arasında açma kapama sırasında oluşacak yüksek gerilimi önlemek için, bu uçların
polaritelerine ters bir diyot yerleştirilir. Böyle bir yapı Şekil 3.9’ da görülmektedir.
MOSFET’ lerde kapı ucu ve kaynağın şasesi arasına bir direnç yerleştirilmelidir. Aksi
takdirde, kapı gerilimi uygulanmasa da anahtar iletimde kalacaktır., MOSFET’ lerin karakteristik
eğrisi Şekil 3.10’ da gösterilmektedir.
Şekil 3. 9. Güç MOSFET' ünün sembolü.
Şekil 3. 10. MOSFET' lerin karakteristik eğrisi.

11
Transistorler: Yarı iletken anahtar olarak bilinen en eski elemanlardır. Base üzerinden geçen akım
ile iletime geçer böylece emiter ve kollektör arası kapalı anahtar konumuna gelir. Base akımı
kesildiğinde, anahtar açık konuma gelir ve transistör kesime girer. Transistörlere ait sembol ve
transistörlerin iç yapısı Şekil 3.11’ de görülmektedir.
Transistorler; iki adet P tipi yarı iletken malzeme arasına, bir adet N tipi veya iki adet N tipi
yarı iletken malzeme arasına, bir adet P tipi yarı iletken yerleştirilmesiyle oluşur. Transistörler; ilk
elektronik anahtar olmalarına rağmen, hala kullanımı en yaygın olan elemanlardır. Çünkü bu
malzemeler yüksek güç ve akıma dayanabilmektedirler. Transistorlerin karakteristik eğrisi Şekil
3.12’ de gösterilmektedir.
Tristörler: İki diyotun birleşimi şeklinde bir yapıya sahip, yarı iletken anahtarlama elemanlarına
denir. Tristörlerin sembolü, iç yapısı ve transistör eşdeğer devresi Şekil 3.13’ de görülmektedir.
Bunlar, gate ucundan geçirilen akım ile tetiklenir. Gate ucundan geçirilen akım kesilse bile, iletimde
kalmaya devam eder. Bu anahtarlar, anot akımının kesilmesi veya anot ve katot arasındaki gerilim
değişim hızının artması ile kesime girer. Bunu sağlayan devreler vardır.
Şekil 3. 11. PNP ve NPN tipi transistörlerin sembolü ve iç yapısı.
Şekil 3. 12. Transistörlerin karakteristik eğrisi.

12
Şekil 3. 13. Tristörün sembolü, yapısı ve tristör eşdeğer devresi.
Bu elemanlar, genelde kontrollü doğrultucularda kullanıldığı için, kontrollü doğrultucu yarı
iletkenin kısaltılmış şekli olan SCR olarak da bilinirler.
IGBT: İngilizce, kapı izoleli bipolar transistor (Insulate Gate Bipolar Transistor) kelimelerinin
kısaltılmışıdır. IGBT’ ler, MOSFET ve bipolar jonksiyon transistorların karakteristiğine sahiptir.
Transistorlerin; iletim kayıpları az, anahtarlama hızları düşüktür. MOSFET’ lerin ise; açma kapama
hızları yüksek, ama iletimdeyken kayıpları fazladır. Bu yüzden hem transistörlerin karakteristiğine
sahip, hem de MOSFET’ lerin hızına yakın olan IGBT’ ler geliştirilmiştir. IGBT’ ler, yeni nesil
anahtar elemanlardır.
Tüm anahtar elemanlar gibi, IGBT’ ler de; kapılarına uygulanan tetikleme gerilimi ile
iletime geçer. IGBT’ ün sembolü ve karakteristik eğrisi Şekil 3.14’ de gösterilmektedir.
IGBT; transistörlerden hızlı fakat MOSFET’ lere göre yavaştır. FDAM’ ları büyük güçlü
olmadıkları için sürücü sistemlerinde kullanılabilecek en ideal eleman MOSFET tir. MOSFET’ lerle
oluşturulmuş sürücü devre şeması Şekil 3.15’ de verilmiştir.
Şekil 3. 14. IGBT' ünün sembolü ve karakteristik eğrisi.

13
Şekil 3. 15. FDAM' unun sürücü devre ile bağlantısı.
3.1.2. Çalışma prensibi
FDAM’ larında; rotor ve konuma göre, stator sargılarının anahtarlanması sonucu bir döner
hareket elde edilir. Statorda, üç faz sargısı vardır. Rotor konumuna bağlı olarak, stator sargılarından
geçen akımın yönü değiştirilir. Bu değiştirme işlemi Şekil 3.16’ daki anahtarlar ile yapılır. Bu
anahtarların kontrolü ile stator sargılarına uygulanan gerilim, geçen akımın yönü ve buna bağlı
olarak rotorda oluşan dönme hareketi Şekil 3.17’ de gösterilmektedir. Böylelikle, statorda manyetik
alan kutupları oluşur. Oluşan kutuplar ile rotor kutuplarının aynı kutuplarının birbirini itmesi, zıt
kutupların birbirini çekmesi sonucu dönme momenti oluşur.
Şekil 3. 16. Sürücü anahtarlarının bağlantısı.

14
Şekil 3. 17. FDAM' unun sargılarından geçen akımın yönü ve rotor konumu.
Dönme hareketinin yönü, işlemciye yüklenen program ile ayarlanır. Bu şekilde rotorda,
sürücü yardımıyla döner bir hareket elde edilir. Oluşan dönme momenti, rotor ve stator manyetik
alanlarının şiddetine bağlıdır. Dönme hareketi sonucu roturun konumu değişir. Sensörler yeni
konumu algılar ve işlemciye gönderir. İşlemci, yeni konuma göre anahtarların konumunu değiştirir.
Rotor yine itme ve çekme kuvveti etkisinde kalır. Bu şekilde hızlı bir anahtarlama ile rotorda dönme
hareketi meydana gelir. Dönme sonucu oluşan sensör konumları ve anahtarların konumları çizelge
3.1’ de verilmiştir.
Çizelge 3. 1. Sensör bilgisine ve rotor konumuna karşılık gelen anahtar durumları.
Hall Sensörleri Anahtar Konumları
Konum θ Konum açısı H1 H2 H3 Q1 Q2 Q3 Q4 Q5 Q6
1 0<= θ <60 1 0 0 1 0 0 1 0 0
2 60<= θ <120 1 1 0 1 0 0 0 1 0
3 120<= θ <180 0 1 0 0 0 1 0 0 1
4 180<= θ <240 0 1 1 0 1 1 0 0 0
5 240<= θ <300 0 0 1 0 1 0 0 0 1
6 300<= θ <360 1 0 1 0 0 0 1 1 0

15
3.1.3. FDAM’ unun matematiksel ve elektriksel eşdeğer devresi
FDAM’ un, üç fazlı stator sargılarının bağlantısı Şekil 3.18’ de görülmektedir. Bu sargının
iç direnci R ve endüktansı L’ dir. Ancak motor çalıştığında, motor sargılarında zıt EMK oluşur. Bu
zıt EMK, hıza ve rotor konumuna bağlı olarak değişen bir kaynak gibi davranır. Bunun da içinde
olduğu, motorun bir faz eşdeğer devresi Şekil 3.19’ daki gibi olur.
Şekil 319’ da verilen eşdeğer devreden a fazı için;
a
ta
aaaa edt
diLRiV ++=
)(.. (3.1)
eşitliği elde edilir.
Şekil 3. 18. FDAM' unun bobinlerinin bağlantısı.
Şekil 3. 19. FDAM' un bir faz eşdeğer devresi.

16
Elde edilen (3.1) eşitliği tüm sargılar için yazılırsa;
MLLc
MLL
MLL
c
bb
aa
−=
−=
−=
0
0
0
(3.2)
+
+
=
c
b
a
c
b
a
c
b
a
c
b
a
c
b
a
c
b
a
e
e
e
i
i
i
dt
d
L
L
L
i
i
i
R
R
R
V
V
V
.
00
00
00
.
00
00
00
(3.3)
elde edilir. Oluşan zıt EMK; konuma bağlı olarak değişen, yamuk bir dalga şeklindedir. Burada zıt
EMK’ inin değeri; bobinin sargı sayısına, manyetik alan şiddetine, rotorun hızına ve konuma bağlı
olarak değişir. Manyetik alan şiddeti ve bobinin sarım sayısı motorun sabit parametrelerinden
olduğu için, bu değerler λ denen bir sabitle ifade edilirler.
Burada oluşan zıt EMK Şekil 3.20’ de gösterildiği gibidir. Şekil 3.20’ de verilen zıt EMK
değişim eğrisini aşağıdaki gibi ifade edebiliriz.
(3.4)
Şekil 3. 20. Zıt EMK değişimi eğrisi.
( )
−≤
≤
−≤
≤
≤
=
2626
116
11
6
7
166
7
6
56
5
6
6
60
max
max
max
max
max
π
θλπθ
π
λπ
θπ
π
θλ
πθ
π
λπ
θπ
π
θλ
πθ
θλ
ise
ise
ise
ise
ise
p
p
p
p
p

17
Zıt EMK (3.4) eşitliğinden de görüldüğü gibi; konum, açısal hız ve motorun zıt EMK
sabitine bağlıdır. Diğer fazlar ile aralarında 120 derece konum farkı olduğundan, zıt EMK’ de 120
derece faz farklı olan gerilimler şeklinde ifade edilebilinir.
( )θωλ=ae (3.5)
−=
3
.2 πθωλbe (3.6)
+=
3
.2 πθωλce (3.7)
Bu fazların dalga şekli, Şekil 3.21’ deki gibidir.
Zıt EMK’ nın bu şekilde olması, sabit mıknatıslı senkron motorlardan farklı karakterde
olmasını sağlar. Çünkü sabit mıknatıslı senkron motorlarda oluşan zıt EMK sinüzoidal şekildedir.
Bu fark aynı boyuttaki FDAM’ larının, sabit mıknatıslı senkron motorların ürettiği güçten %25
daha fazla güç üretilmesini sağlar.
FDAM’ unun ürettiği anlık güç, zıt EMK ile faz sargılarından geçen akımın çarpımına
eşittir. Bu güç; motorun statorundan, rotoruna aktarılan güç olarak bilinir.
Aktarılan bu güçten, sürtünme kayıpları çıkarılınca, motor milinden elde edilen net güç
bulunur. FDAM’ larında sürtünme kayıpları çok az olduğu için sıfır alınabilir. Bu eşitlik, motor
milinden elde edilen net güce eşit alınırsa;
ccbbaae eieieiP ... ++= (3.8)
elde edilir.
Şekil 3. 21. Faz sargılarında indüklenen zıt EMK' nın konuma göre değişimi.

18
Çekilen akımın değişimi, kare dalga şeklindedir (gerçek uygulamada tam kare dalga
şeklinde olmasa da işlemlerin sadeliği için böyle bir kabul yapılır). Akımın bu değişimi;
(3.9)
şeklindedir. (3.9) eşitliğindeki; altı farklı konuma bağlı olan akım ve zıt EMK, üç faz değeri için
ayrı ayrı çarpılıp, toplanırsa ( λ(t)’ nin maksimum değeri λmax, i(t)’ nın maksimum değeri Imax
alınırsa) çıkıştan elde edilen güç;
ωλωλωλ ...... ccbbaae iiiP ++= (3.10)
ωλ ...2 maxmax IPe = (3.11)
olarak bulunur.
Üretilen momentin hesaplanmasında, güç moment eşitliğinden yararlanılır. Momentin
alacağı değer (3.13) eşitliğinden de görüldüğü gibi, iki parametreye bağlıdır. Biri zıt EMK sabiti,
diğeri ise akımın maksimum değeridir.
ω.ee TP = (3.12)
maxmax ..2 ITe λ= (3.13)
3.2. Mekanik Sistemlerin Matematiksel Modeli
Dönen mekanik sistemlerin, karmaşık yapılarını değerlendirebilmek için matematiksel
modeli çıkarılarak sistem analizinin yapılması gerekir. Mekanik sistemlerde dönmeyi oluşturan
moment; sürtünme, atalet momenti ve yük momentinin toplamına eşittir. Yani üretilen moment,
atalet moment sabitinin ivme ile çarpımının, sürtünme kat sayısının hız ile çarpımının ve yük
momentinin toplamına eşittir.
Eğer üretilen moment kontrol edebilirse, hızı da kontrol edilebilir. Aşağıda verilen (3.14)
eşitliği incelenirse; yük momenti sabit kalmak şartıyla, üretilen moment arttırıldığında hızın da
arttığı görülür.
Le TBdt
dJT ++= ω
ω.. ( 3.14)
( )
≤
−≤
≤
≤
≤
=
026
116
11
6
7
06
7
6
56
5
6
06
0
max
max
ise
Iise
ise
Iise
ise
i
πθπ
πθ
π
πθ
π
πθ
π
πθ
θ
p
p
p
p
p

19
3.3. Darbe Genişlik Modülasyonu (Pulse Width Modulation-PWM)
Elektrik enerjisinin verimli bir şekilde kullanımını sağlayan, yüksek hızda anahtarlama
işlemidir (Bose,1997). Bu yöntem kullanılmadan önce, gerilim değiştirmek için çeşitli yöntemler
kullanılmaktaydı. Bu yöntemlere örnek olarak seri direnç ve oto transformatörü verilebilir.
Çıkış ile giriş arasına bağlanan seri bir direnç yardımıyla, elde edilecek gerilimin
değiştirilmesi mümkündür (Şekil 3.22). Şekil 3.22’ deki devrede ÇV gerilimi;
RIVV gÇ .−= (3.15)
yazılabilir. Bu eşitlikte görüldüğü gibi, gerilimin bir kısmı direnç üzerinde düşürülür. Verimi
düşüren bir yöntem olduğu için kullanışlı bir yöntem değildir. Çünkü sistemin çektiği akım bu
direnç üzerinden geçtiğinden, akım ve direnç değeriyle doğru orantılı bir kayıp oluşur.
Diğer bir yöntem ise; şebekeye bağlanan değişken çıkışlı oto transformatörleridir. Elektrik’
in değişken olduğu yerlerde, servo motorlar tarafından ayarlanarak kullanılan bu cihazlar, çıkışta
elde edilen gerilimin sabitlenmesi veya farklı gerilim elde edebilmek için kullanılırlar ( Şekil 3.23).
Şekil 3.23’ de verilen ÇV gerilimi;
gÇ VN
NV .
1
2= (3.16)
şeklinde hesaplanır.
Şekil 3. 22. Seri ayarlı direnç ile gerilim ayarı.
Şekil 3. 23. Oto transformatörü ile gerilim değişimi.

20
Bu eşitlikte görüldüğü gibi; 2N değeri değişken ve ayarlanabilirdir. Bu sayede, çıkış
gerilimi de ayarlanabilir. Bu yöntem, %85–95 arasında verimle çalışır. Bu yöntemin tek
dezavantajı, ağır ve yavaş olmasıdır. Bu nedenle, araştırmalar daha hızlı ve hafif çalışmayı
sağlayacak yüksek verimli yeni yöntemlere yönelmiştir.
Ağır mekanik tasarımın yerini alacak ve bu sorunları çözecek yöntemin, yüksek hızda
çalışan elektronik anahtarlarla mümkün olduğu görülmüştür. Devreye bağlanan bir anahtarla
çıkıştan elde edilen gerilimin ortalama değeri Şekil 3.24’ de görüldüğü gibi değiştirilir. Seri bağlı
yarı iletken anahtarın, anahtarlama hızının yüksek ve iletimdeyken iç direncinin düşük olması
istenir. Hızın önemli olduğu yerde MOSFET, kayıpların az olması istenen yerde transistör veya her
ikisinin de avantajlarına sahip IGBT kullanılır.
Bilindiği gibi, doğru akım devrelerinde gerilim değeri olarak ortalama gerilim değeri ele
alınır. Bu nedenle anahtarın kapalı kalma süresi ve/veya açık kalma süresi değiştirilerek, elde edilen
gerilimin alacağı ortalama gerilim değeri değiştirilir. PWM yönteminde çıkış gerilimi ile giriş
gerilimi arasındaki oran görev periyodu (D) olan bir değer ile ifade edilir. Görev periyodunun
değeri;
offon
on
g
Ç
tt
t
V
VD
+== (3.17)
ile elde edilir. Anahtarın iletimde kalma süresinin, iletimde ve kesimde kalma süresine oranı
şeklindede ifade edilebilir. Taşıyıcı sinyal ile kontrol sinyalinin değişim eğrisi Şekil 3.25’ de
verilmiştir.
Şekil 3. 24. PWM yönteminin basit anahtar yapısı.
Şekil 3. 25. Taşıyıcı sinyal ve kontrol sinyalinin değişimi.

21
PWM yöntemi ile çok geniş aralıkta gerilim kontrolü sağlanabilir. Bu işlem, bir yarı iletken
anahtar ve anahtarlama süresini değiştiren bir kaç elektronik devre elemanı ile gerçekleştirilir. Bu,
uygulamacılara oldukça hafif ve hızlı bir tasarım olanağı verir.
PWM yöntemi, çok çeşitli şekillerde elde edilebilinir. Burada iki gerilim karşılaştırılarak,
PWM dalga şekilleri oluşturulur. Bu iki gerilimden biri, kontrol işlemini sağlayan kontrol sinyali
(VC) diğeri ise, darbe üreten taşıyıcı sinyal olan testere dişli veya üçgen dalgadır (VT).
Taşıyıcı sinyalin genliği ve frekansı sabit tutulur. Kontrol geriliminin genliği değiştirilerek
görev periyodu ayarlanır. Anahtarların açık ve kapalı olma sürelerinin ölçümü zordur. Bu yüzden
görev periyodu, değişken ve ölçülebilen kontrol sinyalinin, taşıyıcı sinyalin en yüksek değerine
oranı olan;
maxT
C
V
VD = (3.18)
eşitliğiyle hesaplanabilir.
Bu karşılaştırma işlemi yapıldıktan sonra oluşan darbe yapısı Şekil 3.26’ da görülmektedir.
Kontrol sinyalinin değeri (VC), taşıyıcı sinyalin en yüksek ve en düşük değeri arasında değiştirilir.
maxmin TCT VVV ≤≤ (3.19)
3.3.1. PWM yönteminin avantaj ve dezavantajları
PWM yöntemi, diğer gerilim kontrol ve ayar yöntemlerinden farklı olarak, hızlı bir
şekilde gerilim kontrolü sağlar. Bu yöntemde, gerilimin hızlı bir şekilde kontrolü yapılırken,
minimum kayıp oluşur. Bu nedenle, verimli ve hızlı bir kontrol işlemi gerçekleştirilir. Bunun
yanında, ayarlı transformatörlere nazaran daha hafif ve daha az yer kaplaması gibi avantajlara da
sahiptir.
Şekil 3. 26. Taşıcı sinyal ile kontrol sinyalinin karşılaştırılması sonucu oluşan darbe yapısı.
22
PWM yönteminin bilinen en önemli dezavantajı; şebeke üzerinde harmoniklere neden
olmasıdır. Bu harmonikler, şebeke geriliminde yüksek frekanslı dalgalanmalar oluşmasına neden
olur. Çıkıştaki gerilim ve akımda da buna bağlı yüksek frekanslı gürültü oluşur.
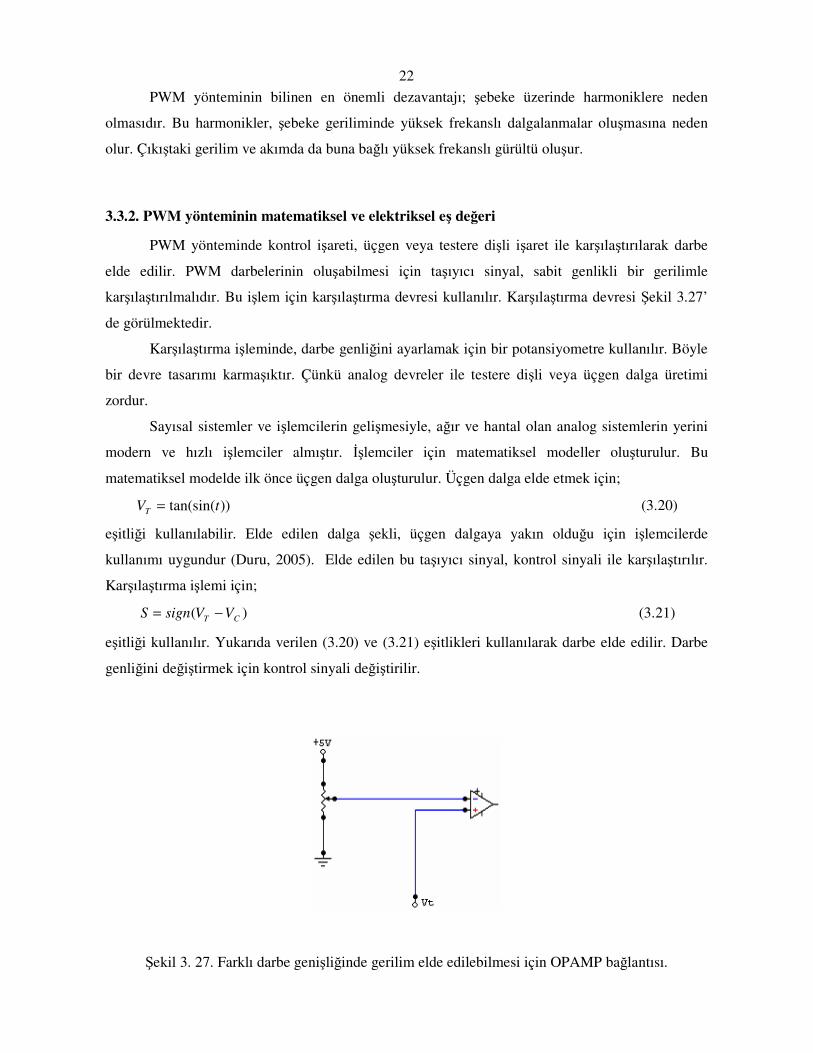
3.3.2. PWM yönteminin matematiksel ve elektriksel eş değeri
PWM yönteminde kontrol işareti, üçgen veya testere dişli işaret ile karşılaştırılarak darbe
elde edilir. PWM darbelerinin oluşabilmesi için taşıyıcı sinyal, sabit genlikli bir gerilimle
karşılaştırılmalıdır. Bu işlem için karşılaştırma devresi kullanılır. Karşılaştırma devresi Şekil 3.27’
de görülmektedir.
Karşılaştırma işleminde, darbe genliğini ayarlamak için bir potansiyometre kullanılır. Böyle
bir devre tasarımı karmaşıktır. Çünkü analog devreler ile testere dişli veya üçgen dalga üretimi
zordur.
Sayısal sistemler ve işlemcilerin gelişmesiyle, ağır ve hantal olan analog sistemlerin yerini
modern ve hızlı işlemciler almıştır. İşlemciler için matematiksel modeller oluşturulur. Bu
matematiksel modelde ilk önce üçgen dalga oluşturulur. Üçgen dalga elde etmek için;
))tan(sin(tVT = (3.20)
eşitliği kullanılabilir. Elde edilen dalga şekli, üçgen dalgaya yakın olduğu için işlemcilerde
kullanımı uygundur (Duru, 2005). Elde edilen bu taşıyıcı sinyal, kontrol sinyali ile karşılaştırılır.
Karşılaştırma işlemi için;
)( CT VVsignS −= (3.21)
eşitliği kullanılır. Yukarıda verilen (3.20) ve (3.21) eşitlikleri kullanılarak darbe elde edilir. Darbe
genliğini değiştirmek için kontrol sinyali değiştirilir.
Şekil 3. 27. Farklı darbe genişliğinde gerilim elde edilebilmesi için OPAMP bağlantısı.

23
3.4. Kontrol Yöntemleri
Günümüzde kontrol sistemlerinin tasarımına ilişkin birçok çözüm sunulmasına karşın, PID
yöntemi en yaygın olarak kullanılan kontrol yöntemidir. Bunun nedeni; bu kontrolörün, endüstriyel
sistemlerin büyük çoğunluğu olan tek giriş ve tek çıkışlı sistemler için çoğu kez yeterli çözüm
sunmasıdır (Kurtulan, 2001).
3.4.1. Oransal, integral ve türev tipi kontrolör (PID)
Uzun yıllardır kullanılan bu yöntem, istenilen çıkış (referans girişi) ile gerçek çıkış
arasındaki farka (hataya göre) göre çıkışın şiddetini ayarlar (Yüksel, 2001). Bu yöntem; doğrusal bir
kontrol yöntemidir. Burada kontrol işlemi; oransal etki (P), oransal-integral etki (PI), oransal-türev
etki (PD) veya oransal-integral-türev (PID) etki yöntemleri ile gerçekleştirilir (Yüksel, 2001).
3.4.1.1. Oransal tip (P) kontrolör
Oransal etki; istenilen çıkış (referans, ωg) ile çıkış (ωç) arasındaki farkın belli bir katsayı
( PK ) ile çarpılmasıyla, çıkışın kontrol edilmesi prensibine dayanır. Bu tip bir kontrolör;
Çgte ωω −=)( (3.22)
)(. tP eKP = (3.23)
eşitlikleriyle çıkış sinyalini hesaplar.
Sistem; istenilen değerin altında bir çıkış verdiğinde, pozitif bir hata oluşur. Bu hatanın
pozitif olduğunu ve büyüklüğünü algılayan işlemci, ona göre çıkış üreterek hatanın sıfır olmasını
sağlar. Aynı şekilde; sistemin değeri, istenilen değerden büyük ise, işlemci bunu algılayarak yine
hatanın sıfır olmasını sağlar. İşlemsel yükselteç (OPAMP) ile yapılmış bir P tipi kontrolör Şekil
3.28’ de görülmektedir. Burada giriş ile çıkış arasındaki hata değeri (e), kontrolörün girişine
uygulanır. Çıkışta ise, Kp kontrolör değeri ile çarpılmış bir hata değeri elde edilir.
Bu kontrolörün tek başına kullanımı mümkündür. Ancak bu durum, sistemde sürekli durum
hatasına neden olur. Bunu önlemek için sisteme integral etki eklenir.
Şekil 3. 28. P tipi Kontrolörün OPAMP eşdeğeri.

24
3.4.1.2. Oransal integral tipi kontrolör (PI)
Çıkış; sistemin hatasının integralinin alınıp, bir kat sayı ile çarpımından elde edilir. Oransal
kontrolörün tek başına kullanıldığı sistemlerde, sürekli durumda hatanın sıfır olması mümkün
değildir. Çünkü hatanın sıfır olması durumunda, sistem herhangi bir çıkış üretmeyecek ve çıkış
istenilen değerden uzaklaşacaktır. Yani sistem kendiliğinden sürekli durum hatası üretecektir.
Bunu önlemek için; hatanın integrali alınıp, belli bir integral zaman sabitine (Ti ) bölünerek
oransal değere eklenir. Bu durum;
∫+= dteTi
eKpPI tt .1
. )()( (3.24)
eşitliği ile verilir. Böyle bir kontrolörün analog devre şeması Şekil 3.29’ da verilmiştir. Son yıllarda gelişen
dijital kontrol işlemlerinde, hatanın önceki değeri ile sonraki değeri toplanıp, örnekleme zaman
sabiti ile çarpımı sonucunun, integral zaman sabitine oranı olan;
[ ])).((1
. )()()( itt
i
tP tteeT
eKPI +++= (3.25)
eşitliğiyle hesaplanır.
PI tipi kontrolörde, sistemin ani değişimlere karşı cevap hızı düşüktür. Sistemin cevap hızını
arttırmak için, sisteme türev tipi kontrolör eklenir.
Şekil 3. 29. PI tipi Kontrolörün OPAMP ile tasarımı.

25
3.4.1.3. Oransal türev kontrol (PD)
Sistem hatasının değişim hızının, türev katsayısıyla çarpımından elde edilen çıkış
yöntemidir. P ve PI türü kontrolörlerde, sistemin ani değişim hızına karşı cevap hızı oldukça
düşüktür. Bu cevap hızını artırabilmek için sisteme türev tipi kontrolör eklenir. Bu sayede, sistemin
ani değişimlere karşı dayanımı artırılır.
Sistem, gerekli çıkış sinyalini hesaplamak için;
dt
deTeKPD
t
DtP
)(
)( .. += (3.26)
eşitliğini kullanır. Bu eşitliği sağlayan OPAMP’ lı analog devre Şekil 3.30’ da verilmiştir.
Oransal-türev etkili kontrolörün dijital olarak gerçekleştirilebilmesi için; hatanın bir önceki
örnekleme zamanındaki hatadan çıkarılıp, örnekleme zaman sabitine bölünüp türev zaman sabitiyle
çarpımı ile D tipi hesaplanır;
i
tit
DtPtt
eeTeKPD
−
−+=
)()(
)(. (3.27)
PD tipi kontrolörlerde I etkisi olmadığı için sistemde sürekli durum hatası oluşmaktadır.
3.4.1.4. Oransal-integral-türev (PID) tipi kontrolör
Oransal integral ve türev kontrolörünün özelliklerinin bir arada kullanılmak istendiğinde, bu
tip bir kontrolör tercih edilir. Yani sistemin, hem sürekli durum hatası üretmemesi ve hem de ani
değişimlere karşı dayanıklı olması için; oransal, integral ve türev etkili kontrolör kullanılır. Sistemin
analog devre modeli Şekil 3.31’ de verilmiştir.
Şekil 3. 30. PD tipi kontrolörün OPAMP' lı yapısı.

26
Şekil 3. 31. PID tipi Kontrolörün OPAMP ile tasarımı.
Şekil 3.31’ de verilen kontrolörde PID değeri;
).().1
(.)(
)()(dt
deTdte
TeKPID
t
Dt
i
tP ++= ∫ (3.28)
eşitliğiyle hesaplanır. PID tipi bir kontrolörün, dijital olarak gerçekleştirilmesi için yukarıda anlatılan işlemlerin
birlikte kullanılması yeterlidir. Bu şekilde bir kontrolör çıkış işlemi için;
[ ]i
tit
Ditit
i
tPtt
eeTttee
TeKPID
−
−++++=
)()(
)()()( )).((1
. (3.29)
eşitliğini kullanarak çıkış işareti sinyalini hesaplayabilir.
3.5. Paralel Port
Bilgisayarın dış dünyayla iletişimini sağlayan, basit ve hızlı bir donanımdır. Bilgisayar bu
donanımı sayesinde, dışarıdan veri alıp dışarıya veri gönderebilir (Atan, 2004).
Paralel port'lar, yapı itibariyle 25 pin'den oluşur. Bunlar; 5 tane giriş (status), 8 tane çıkış
(data outports) ve 4 tane kontrol port'udur. Geriye kalan pin'ler ise şase (toprak) pinleridir. Paralel
port'ların genel görünüşü Şekil 3.32.' de gösterilmektedir.
Burada bilgisayardan dış devreye bilgi aktarılırken, çıkış pin'ine lojik 0 (0V) veya 1 (+5V)
değeri gönderilir. Yine bilgisayara veri aktarılırken, giriş pin'lerinden lojik 0 veya 1 değeri
gönderilir.
Burada üç önemli noktaya dikkat edilmesi gerekir. Bunlardan birincisi; veri aktarılırken,
port'un ve devrenin şase uçları birleştirilmelidir. İkincisi ise; paralel port'a bağlanacak devre
elemanı, 1mA' den fazla akım çekmemelidir. Son olarak, girişe +5 V'tan fazla gerilim
uygulanmamalıdır. Aksi takdirde, bilgisayar zarar görebilir veya sistem çalışmayabilir.

27
Şekil 3. 32. Paralel portun yapısı.
Paralel port pinleri üç gruba ayrılır. Bunlar: giriş, çıkış ve kontrol pinleridir.
3.5.1. Giriş (status) pinleri
Bilgisayara, dış devreden veri aktarmak için kullanılır. Veri, ikili sayı tabanında sekiz haneli
olarak bilgisayara aktarılır. Burada dikkat edilirse, paralel port'tan bilgisayara veri aktarma işlemi
için beş pin tahsis edilmiştir. Bu çelişkiye şu şekilde açıklık getirilebilir; bilgisayara veri
aktarılırken bu beş pin'den sinyal girilir, diğer lojik değerlere ise bilgisayar kendisine göre değer
atar. Bu değer genellikle 1 olup, yine de farklı değerler alabilir. Bilgisayara veri aktarma işlemi
şöyle örneklenebilir; S7 ve S3 giriş pinlerinden (yani 11. ve 15. pin'lerden) lojik 0 sinyali, diğer
giriş pin'lerinden ise lojik 1 değeri gönderildiğinde, bilgisayar bunu;
( ) ( )210 01111111123 =
olarak algılar.
( ) ( )102 123011110111 =
Paralel porttan veri göndermek için örnek anahtar bağlantı şeması Şekil 3.33’ de
gösterilmektedir. Porttan bilgisayara veri gönderilirken;
a=inp(&h379)
komutu kullanılır. Visual Basic programı için bu komut kullanıldı. Daha farklı programlama dilleri
için farklı komutlar kullanılabilir. Komutta &h379 değeri, portun veri giriş adresidir. Portttan gelen
bilgi a değişkenine kayıt edilir.

28
Şekil 3. 33. Paralel porta veri giriş işlemi ve anahtar bağlantı şeması.
3. 5. 2. Çıkış (data) pinleri
Bilgisayardan dış devreye veri aktarmak için kullanılır. Veri, sekiz haneli lojik değerler
şeklinde (1 ve 0 gibi) aktarılır. Çıkış işlemi için sekiz adet pin kullanılmıştır. Bilgisayardan dış
devreye veri aktarma işlemi şöyle örneklendirilebilir; Program yardımıyla bilgisayardan dış devreye
(155)10 değeri gönderildiğinde, bilgisayar veriyi ilk önce ikili sayı tabanına çevirir ve bu şekilde
port'a aktarır.
( ) ( )210 10011011155 =
Port çıkışı şu şekilde olur: D0, D1, D3, D4 ve D7 pin'leri lojik 1, D2, D5, D6 pin'leri ise
lojik 0 değerini alır. Veri çıkış işlemi için port bağlantısı Şekil 3.34’ de görülmektedir.
Bilgisayardan porta veri göndermek için programda;
out(&h378, 1)
komutu kullanılır. Burada &h378, çıkış portunun adresidir. 1 ise; porta göndereceğimiz bilginin,
onluk tabandaki değeridir.
Şekil 3. 34. Veri çıkış işlemi için paralel port bağlantısı.
29
Çıkışa bağlanacak elamanlar, 1mA’ den fazla akım çekmemeli veya çıkışa herhangi bir
şekilde, kısa devre veya ters yönden yüksek gerilim uygulanmamalıdır. Aksi taktirde portun
çıkışları zarar görebilir. Bunu önlemek için kuplaj devresi kullanılır.
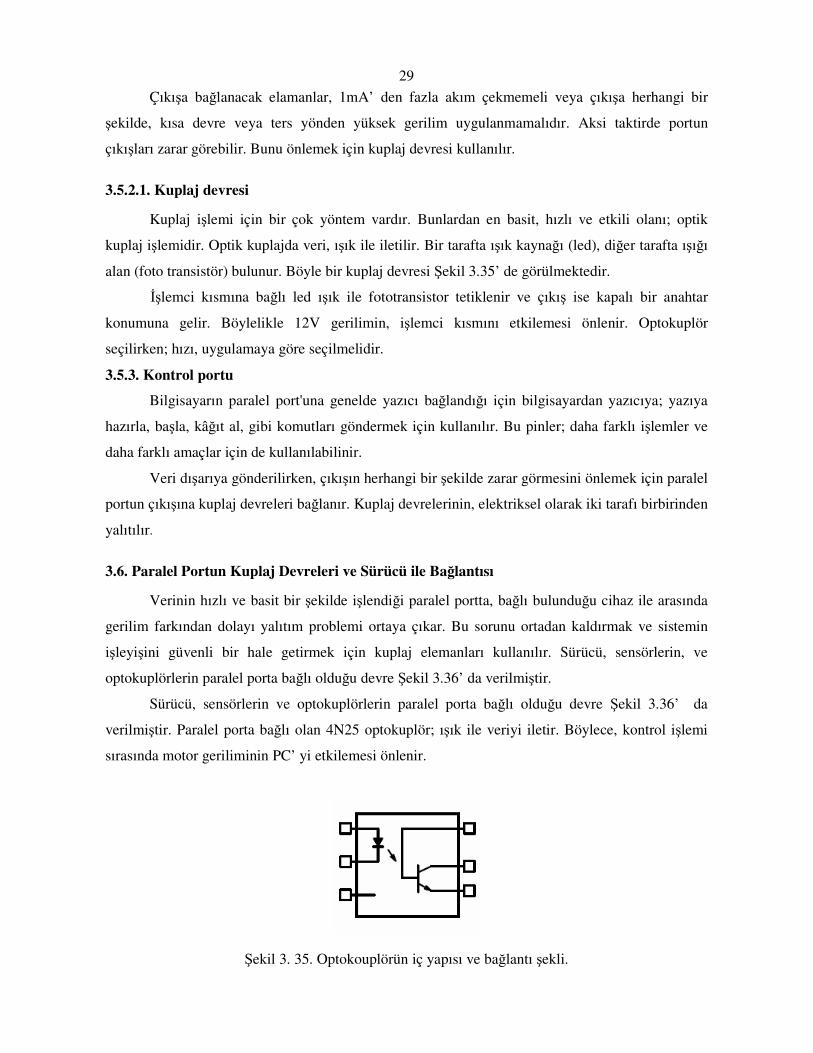
3.5.2.1. Kuplaj devresi
Kuplaj işlemi için bir çok yöntem vardır. Bunlardan en basit, hızlı ve etkili olanı; optik
kuplaj işlemidir. Optik kuplajda veri, ışık ile iletilir. Bir tarafta ışık kaynağı (led), diğer tarafta ışığı
alan (foto transistör) bulunur. Böyle bir kuplaj devresi Şekil 3.35’ de görülmektedir.
İşlemci kısmına bağlı led ışık ile fototransistor tetiklenir ve çıkış ise kapalı bir anahtar
konumuna gelir. Böylelikle 12V gerilimin, işlemci kısmını etkilemesi önlenir. Optokuplör
seçilirken; hızı, uygulamaya göre seçilmelidir.
3.5.3. Kontrol portu
Bilgisayarın paralel port'una genelde yazıcı bağlandığı için bilgisayardan yazıcıya; yazıya
hazırla, başla, kâğıt al, gibi komutları göndermek için kullanılır. Bu pinler; daha farklı işlemler ve
daha farklı amaçlar için de kullanılabilinir.
Veri dışarıya gönderilirken, çıkışın herhangi bir şekilde zarar görmesini önlemek için paralel
portun çıkışına kuplaj devreleri bağlanır. Kuplaj devrelerinin, elektriksel olarak iki tarafı birbirinden
yalıtılır.
3.6. Paralel Portun Kuplaj Devreleri ve Sürücü ile Bağlantısı
Verinin hızlı ve basit bir şekilde işlendiği paralel portta, bağlı bulunduğu cihaz ile arasında
gerilim farkından dolayı yalıtım problemi ortaya çıkar. Bu sorunu ortadan kaldırmak ve sistemin
işleyişini güvenli bir hale getirmek için kuplaj elemanları kullanılır. Sürücü, sensörlerin, ve
optokuplörlerin paralel porta bağlı olduğu devre Şekil 3.36’ da verilmiştir.
Sürücü, sensörlerin ve optokuplörlerin paralel porta bağlı olduğu devre Şekil 3.36’ da
verilmiştir. Paralel porta bağlı olan 4N25 optokuplör; ışık ile veriyi iletir. Böylece, kontrol işlemi
sırasında motor geriliminin PC’ yi etkilemesi önlenir.
Şekil 3. 35. Optokouplörün iç yapısı ve bağlantı şekli.

30
Şekil 3. 36. Sensörlerin ve sürücünün optokuplör ile porta bağlantısı.
Paralel porttan motor konum bilgisi, hall effect sensörüyle alınır. Hall effect sensörleri +5V
gerilimle çalıştığı için, doğrudan paralel portun giriş pinlerine bağlanabilir. Ancak, sensörü besleyen
gerilimin şase ucu ile paralel portun şasesi birleştirilmelidir.
R7, R8, R9, R10, R11 ve R12 dirençleri, anahtarların kesime girmesini sağlar. R1, R2, R3,
R4, R5 ve R6 dirençleri ise akım sınırlayıcı olarak kullanılmıştır.
4. BULGULAR
4.1. FDAM’ unun PWM Yöntemiyle Hız Ayarı
Mekanik sistemlerde sistemin hızı, üretilen momentle doğru orantılıdır. FDAM’ unun
ürettiği moment; akımın maksimum değeri ile zıt EMK’ nın hızdan bağımsız alacağı maksimum
değere bağlıdır. Burada zıt EMK sabit değerinin değiştirilmesi zordur. Bu nedenle, üretilen
momentin ayarı için akımın alacağı değer sınırlandırılarak değiştirilebilir. Bu sınırlandırma işlemi
için en ideal yöntem, PWM yöntemidir.
PWM yönteminde; görev periyodunun değeri arttıkça, uygulanan gerilimin ortalama değeri
artar. Buna bağlı olarak, akımın alacağı ortalama değer de artar.
PWM yönteminde, görev periyodunun değerini artırmak için kontrol sinyalinin değerinin
arttırılması gerekir. Vc değeri arttırıldıkça, çıkışta elde edilen gerilimin değeri artar. VT gerilimi ise,
değeri zamanla değişen bir fonksiyondur.
))tan(sin(tVT = (4.1)
Yukarıdaki eşitlik üçgen dalgaya yakın dalga şekli elde etmek için kullanıldı. PWM
yönteminden darbe çıkışı elde etmek için;
)(. TC VVsignVS −= (4.2)
eşitliğini kullanırız.
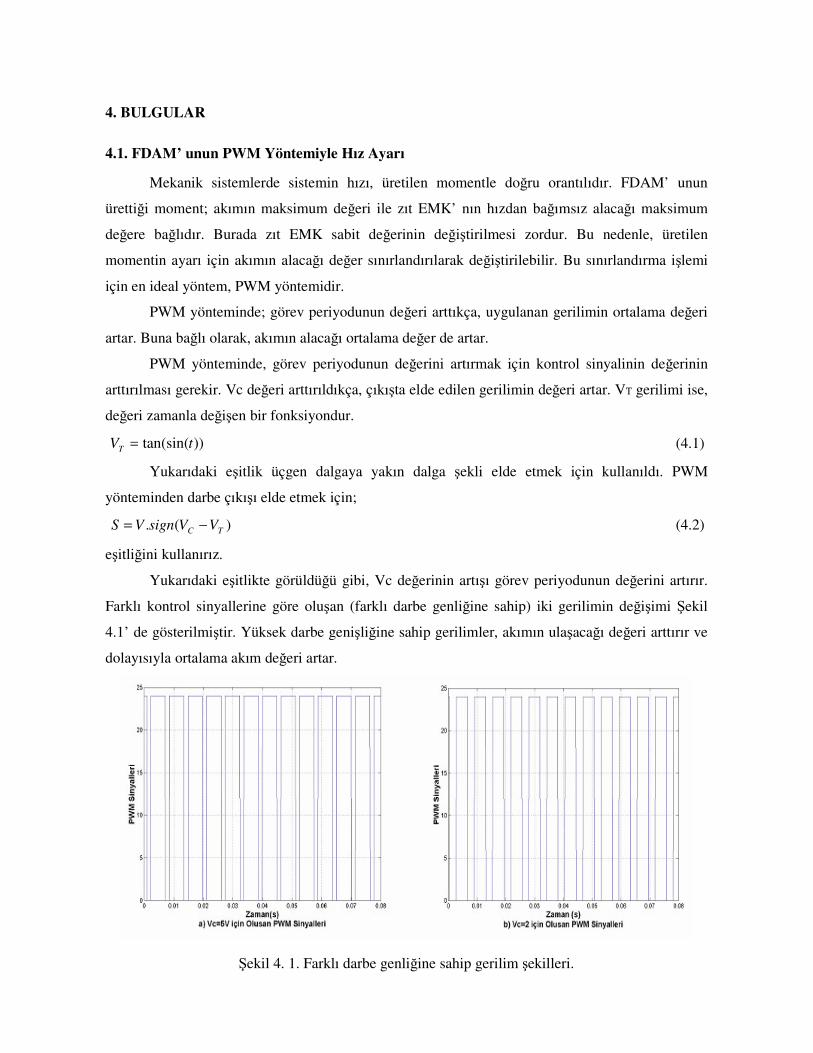
Yukarıdaki eşitlikte görüldüğü gibi, Vc değerinin artışı görev periyodunun değerini artırır.
Farklı kontrol sinyallerine göre oluşan (farklı darbe genliğine sahip) iki gerilimin değişimi Şekil
4.1’ de gösterilmiştir. Yüksek darbe genişliğine sahip gerilimler, akımın ulaşacağı değeri arttırır ve
dolayısıyla ortalama akım değeri artar.
Şekil 4. 1. Farklı darbe genliğine sahip gerilim şekilleri.

32
Burada yapılan işlemde Vc değeri arttırıldıkça, motorda üretilen moment artmaktır. Moment
artışı, sabit yüklü sistemlerde hızı arttırmaktadır. Bu şekilde görev periyodunun değerinin artması,
dolaylı olarak hızı arttırır.
4.2. FDAM’ unun PID Yöntemiyle Kontrolü
FDAM’ unun istenen hızda dönmesini sağlamak için, darbe genliğini otomatik olarak
hesaplayan bir kontrolör gereklidir. Bu çalışmada, kontrol işlem için PID yöntemi kullanılmıştır.
PID yöntemiyle, istenilen çıkış ile çıkış arasındaki farka göre darbe genliği hesaplanacaktır.
FDAM’ unun, hız kontrolünün yapılabilmesi için, motorun istenen hızda dönmesini
sağlayan momentin üretilmesi gerekir. Motorun hızını arttırmak için, üretilen moment
arttırılmalıdır. Bunu sağlamak için, motorun görev periyodunun değerinin artması gerekir. Sisteme
ait blok diyagramı Şekil 4.2’ deki gibidir.
Burada; verilen ω değeriyle, sistemin çıkışından elde edilen hız değeri karşılaştırılır. PID
kontrolör aradaki hataya göre, kontrol geriliminin değerini hesaplar. Hatanın değeri;
ωω −= gte )( (4.3)
şeklinde hesaplanır.
Kontrol geriliminin değeri P tipi kontrolör kullanıldığında çıkış;
)(. tPc eKV = (4.4)
şeklinde bulunur.
Şekil 4. 2. PID ile hız kontrolörünün blok şeması.

33
Yukarıdaki eşitlikte verilen KP, sabit bir katsayıdır. Bu sisteme I tipi kontrolör
uygulandığında, kontrol sinyalinin değeri
∫+= dteT
eKPI t
i
tP .1
. )()( (4.5)
eşitliğiyle hesaplanır. Bu eşitlikte iT değeri integral zaman sabitidir.
Sisteme D tipi kontrolör eklendiğinde, kontrol sinyalinin hesaplanması için;
).().1
(.)(
)()(dt
deTdte
TeKPID
t
Dt
i
tP ++= ∫ (4.6)
eşitliği kullanılır. Bu eşitlikte Td değeri; türev zaman sabiti olup, türev etkisinin büyüklüğünü
belirler.
Sistem eğer analog bir devreyle yapılacak olursa, yukarıdaki formüle dayalı OPAMP’ larla
tasarlanan elektronik bir devre kullanılabilir. Ama bu sistem dijital olarak tasarlandığı için, kontrol
sinyalinin değeri
[ ]i
tit
Ditit
i
tPtt
eeTttee
TeKPID
−
−++++=
)()(
)()()( )).((1
. (4.7)
eşitliğiyle hesaplanır. Yukarıdaki eşitlikte; t örnekleme zamanı ve ti ise bir önceki örnekleme anıdır.
e(ti) ve e(t) ise; bu anlardaki hata sinyallerini ifade eder. (Kurtulan, 2001)
4.3. FDAM’ unun Hız Kontrol Simülasyonu ve Uygulaması
Yapılan bu çalışmada FDAM’ unun hız kontrol ve ayar işleminin simülasyonu ve PWM
yöntemiyle hız ayar uygulaması yapılmıştır. Simülasyon çalışmasında PWM yönteminin hız
üzerindeki etkisi analiz edilmiş, uygulama yapılarak bu etki gözlenmiştir.
4.3.1. Simülasyon
FDAM’ unun, hız ayarı ve kontrolünü yapmak için; motor ve kontrolörün matematiksel
ifadeleri kullanılarak, bilgisayar ortamında analizi yapılmıştır. Bu işlemle, motora uygulanan
yöntemdeki performansı değerlendirmek üzere hız, akım, gerilim ve moment gibi değerlerin anlık
değişimi gözlenmiştir. Bu sayede uygulamaya yönelik bir çalışma yapıldığında, sistemin
davranışını kestirmek amaçlanmıştır. Simülasyonda; FDAM’ unun PWM yöntemiyle hız ayarı ve
PID yöntemiyle hız kontrol işleminin simülasyonu yapılmıştır. Simülasyon çalışmasında,
difransiyel denklemlerin çözümü için 4. derecede Runge Kutta yöntemi, simülasyon programı
olarak da Matlab 6.1 programı kullanılmıştır.

34
Simülasyon çalışması için kullanılan örnek motorun parametreleri, aşağıda verilmiştir:
B=0 N.m, J=0.001N.m.s²/rad², L=aL =
bL =cL =0.001H, R=
aR =bR =
cR =5.1Ω, V=24V, LT =0 N.m
ve λ=0.21 şeklindedir.
Simülasyon çalışmasında, örnek motor parametreleri sürtünme ve vantilasyon kayıplarını
ifade eden katsayısı (B=0 N.m), sıfır olarak (ideal) kabul edilmiştir. Yük momenti ( LT =0, yüksüz),
sıfır olarak seçilmiştir.
FDAM’ un hız moment grafiği Şekil 4.3’de verilmiştir. Şekil 4.3.a’ da görüldüğü gibi, hızın
maksimum değeri olan 1150 d/d’ ya 0.5 s sürede ulaşmaktadır. Hız bu değere ulaştıktan sonra, sabit
hızda devam etmektedir. Hız değişiminden gözlendiği gibi, motorun hızında yüksek frekanslı
gürültü oluşmaktadır. Bu gürültünün oluşmasının nedeni; yine Şekil 4.3.b’ de verilen momentteki
gürültüdür. Hız maksimum değere ulaşıncaya kadar, üretilen momentin maksimum değerde kaldığı
gözlenmekte ve hız maksimum değere ulaştıktan sonra, moment azalarak minimum değere
ulaşmaktadır. Bu değerden sonra momentte dalgalanma gözlenmektedir. Bu dalgalanmanın nedeni,
akımda oluşan dalgalanmadır.
Şekil 4 3. FDAM' un kontrolsüz a) hız ve b)moment grafiği.

35
FDAM’ unun kontrolsüz çalışmada faz sargılarına uygulanan gerilimlerin zamana göre
değişimi Şekil 4.4’ de görülmektedir. Şekil 4.4’de görüldüğü gibi; gerilim ilk anda (kalkış anında)
uzun süre ilk fazda kalmaktadır. Bunun nedeni; motorun ilk anda hareketsiz durumdan, hareketli
duruma geçmesi için geçen sürenin uzun olmasıdır. Bu sürenin uzunluğu, yüke ve motora bağlı
olarak değişmektedir. Faz sargılarına uygulanan gerilimler arasında 120° faz farkı vardır.
Şekil 4. 4. Kontrolsüz çalışmada gerilim zaman grafiği.

36
Kontrolsüz çalışan motorun çektiği akımın zamana göre değişimi Şekil 4.5’ de
gözlenmektedir. Şekil 4.5’de görüldüğü gibi akım ilk kalkış anında maksimum değere ulaşmaktadır.
Bunun nedeni; motorun kalkınması için gerilimin ilk faza uzun süre uygulanmasıdır. Akımın bir
fazdan diğerine geçişinde, akımda dalgalanma olduğu gözlenmektedir. Bu dalgalanmanın sebebi faz
geçişleri sırasında anahtarlarda oluşan gecikmedir. Buna bağlı olarak, (akımdaki dalgalanma
doğrudan momenti etkilediği için) moment ve hızda gürültü oluşmaktadır. Bu dalgalanmayı
saymazsak, akımın değişimi kare dalgaya benzemektedir.
Şekil 4. 5. Kontrolsüz çalışmada akım zaman grafiği.

37
PWM yöntemiyle hız ayarı yapılan motorun hız ve moment grafiği Şekil 4.6’da verilmiştir.
Motorun kontrol sinyalinin değeri, 5V alınmıştır. Hız değişiminde motorun normal çalışmadaki
(kontrolsüz çalışmada) hızdan, daha düşük bir hızda çalıştığı gözlenmektedir. Yine Şekil 4.6.b’ deki
moment değişimi incelendiğinde, momentte yüksek frekanslı gürültü oluştuğu gözlenmektedir. Bu
gürültü, motorun hızında yüksek frekanslı gürültü oluşturmakta ve bu değişim de yine Şekil 4.6.a’
da, hız-zaman grafiğinde gözlenmektedir.
Şekil 4. 6. PWM yöntemiyle Vc=5V için hız moment grafiği.

38
PWM yöntemiyle kontrol edilen FDAM’ unun gerilim zaman grafiği Şekil 4.7’ de
verilmiştir. PWM yönteminde görüldüğü gibi gerilim, darbeli olarak motorun faz sargılarına
uygulanmaktadır. Bu darbenin süresi kontrol sinyalinin değeri ile ayarlanır. Kontrol sinyalinin
değeri cV =5V olarak alınmıştır. Kontrol sinyalinin değerinin azaltılması ile motorun sargılarına
uygulanan gerilimin genliği azaltılmış olur. Burada motorun faz sargılarına uygulanan gerilimin,
kalkış anında, normal çalışma durumuna göre daha uzun süre uygulandığı görülmektedir. Yani
genliği düşük bir gerilim, motorun kalkış süresini olumsuz etkilemektedir.
Şekil 4. 7. PWM yöntemiyle kontrol edilen motorun Vc=5V için gerilim zaman grafiği.

39
PWM yöntemiyle kontrol edilen FDAM’ unun hız ayarı sonucu akımın zamana göre
değişimi Şekil 4.8’ de verilmiştir. Gerilimin, darbeli olarak uygulanması sonucu akımda dalgalanma
oluşmaktadır. Bu dalgalanma, motorun moment ve momente bağlı olan hızda normal çalışmaya
göre, daha fazla gürültü oluşmasına neden olmaktadır. Akımdaki gürültünün miktarı, genliğe göre
değişmektedir. Yani gerilimin darbe genliği, akımın alacağı ortalama değeri ve dalgalanmayı
belirler.
Şekil 4. 8. PWM Yöntemiyle Kontrol edilen motorun cV =5V için akım zaman grafiği.
40
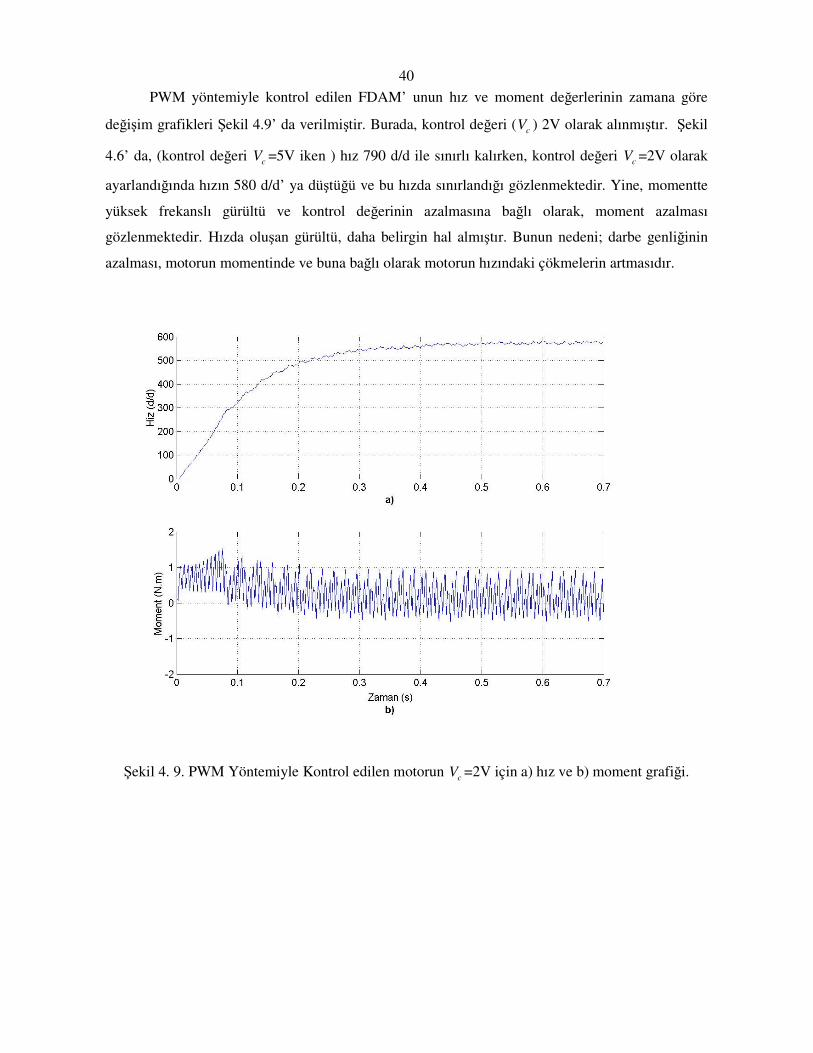
PWM yöntemiyle kontrol edilen FDAM’ unun hız ve moment değerlerinin zamana göre
değişim grafikleri Şekil 4.9’ da verilmiştir. Burada, kontrol değeri (cV ) 2V olarak alınmıştır. Şekil
4.6’ da, (kontrol değeri cV =5V iken ) hız 790 d/d ile sınırlı kalırken, kontrol değeri cV =2V olarak
ayarlandığında hızın 580 d/d’ ya düştüğü ve bu hızda sınırlandığı gözlenmektedir. Yine, momentte
yüksek frekanslı gürültü ve kontrol değerinin azalmasına bağlı olarak, moment azalması
gözlenmektedir. Hızda oluşan gürültü, daha belirgin hal almıştır. Bunun nedeni; darbe genliğinin
azalması, motorun momentinde ve buna bağlı olarak motorun hızındaki çökmelerin artmasıdır.
Şekil 4. 9. PWM Yöntemiyle Kontrol edilen motorun cV =2V için a) hız ve b) moment grafiği.
41
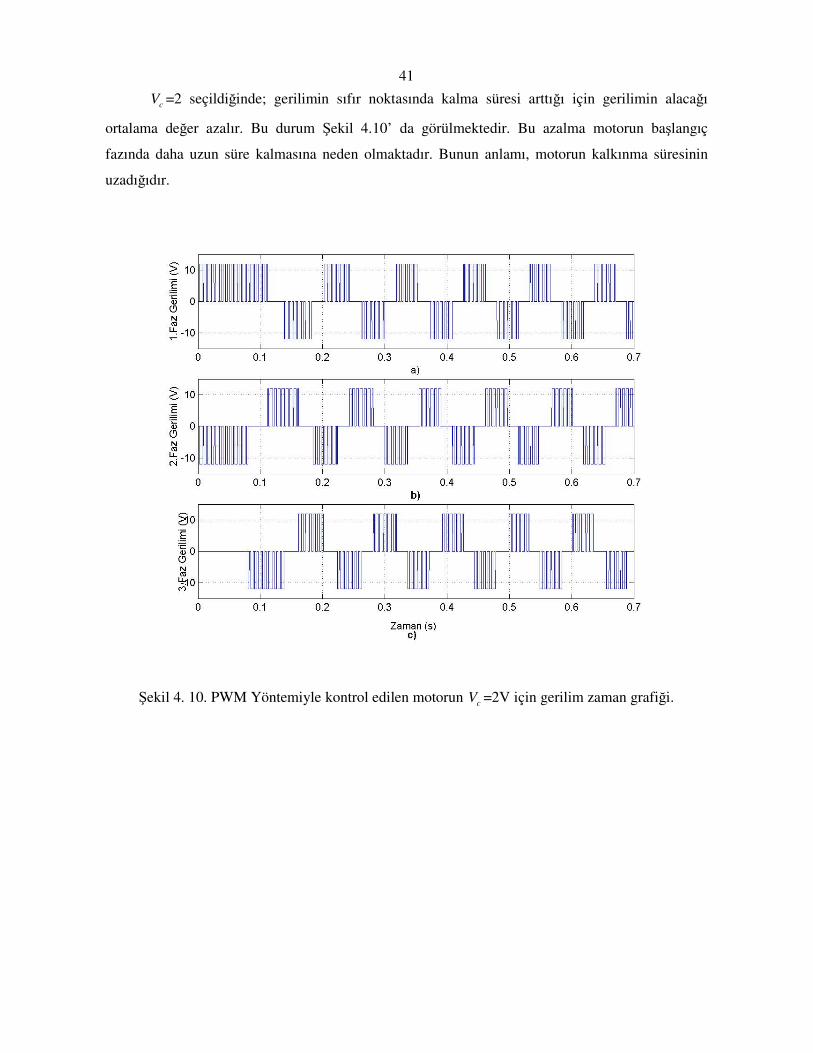
cV =2 seçildiğinde; gerilimin sıfır noktasında kalma süresi arttığı için gerilimin alacağı
ortalama değer azalır. Bu durum Şekil 4.10’ da görülmektedir. Bu azalma motorun başlangıç
fazında daha uzun süre kalmasına neden olmaktadır. Bunun anlamı, motorun kalkınma süresinin
uzadığıdır.
Şekil 4. 10. PWM Yöntemiyle kontrol edilen motorun cV =2V için gerilim zaman grafiği.

42
Kontrol değerinin cV =2V için akımın zamana göre değişimi Şekil 4.11’ de verilmiştir.
Gerilimin genliği azaldığı için akımın genliği de buna bağlı olarak azalır. Akımdaki bu azalma,
momenti ve buna bağlı olarak hızı azaltır. Gerilimin genliğindeki azalma nedeniyle akımdaki
dalgalanma daha net gözlenmektedir.
Şekil 4. 11. PWM Yöntemiyle kontrol edilen motorun cV =2V için akım zaman grafiği.
43
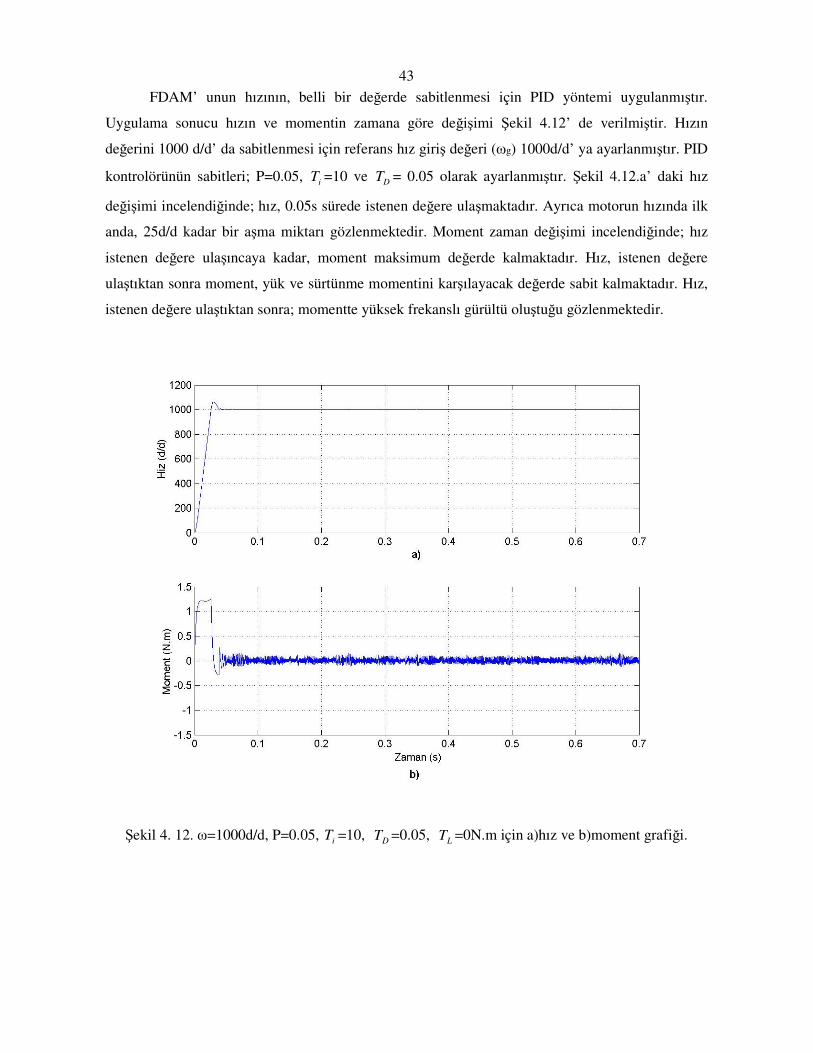
FDAM’ unun hızının, belli bir değerde sabitlenmesi için PID yöntemi uygulanmıştır.
Uygulama sonucu hızın ve momentin zamana göre değişimi Şekil 4.12’ de verilmiştir. Hızın
değerini 1000 d/d’ da sabitlenmesi için referans hız giriş değeri (ωg) 1000d/d’ ya ayarlanmıştır. PID
kontrolörünün sabitleri; P=0.05, iT =10 ve DT = 0.05 olarak ayarlanmıştır. Şekil 4.12.a’ daki hız
değişimi incelendiğinde; hız, 0.05s sürede istenen değere ulaşmaktadır. Ayrıca motorun hızında ilk
anda, 25d/d kadar bir aşma miktarı gözlenmektedir. Moment zaman değişimi incelendiğinde; hız
istenen değere ulaşıncaya kadar, moment maksimum değerde kalmaktadır. Hız, istenen değere
ulaştıktan sonra moment, yük ve sürtünme momentini karşılayacak değerde sabit kalmaktadır. Hız,
istenen değere ulaştıktan sonra; momentte yüksek frekanslı gürültü oluştuğu gözlenmektedir.
Şekil 4. 12. ω=1000d/d, P=0.05, iT =10, DT =0.05, LT =0N.m için a)hız ve b)moment grafiği.
44
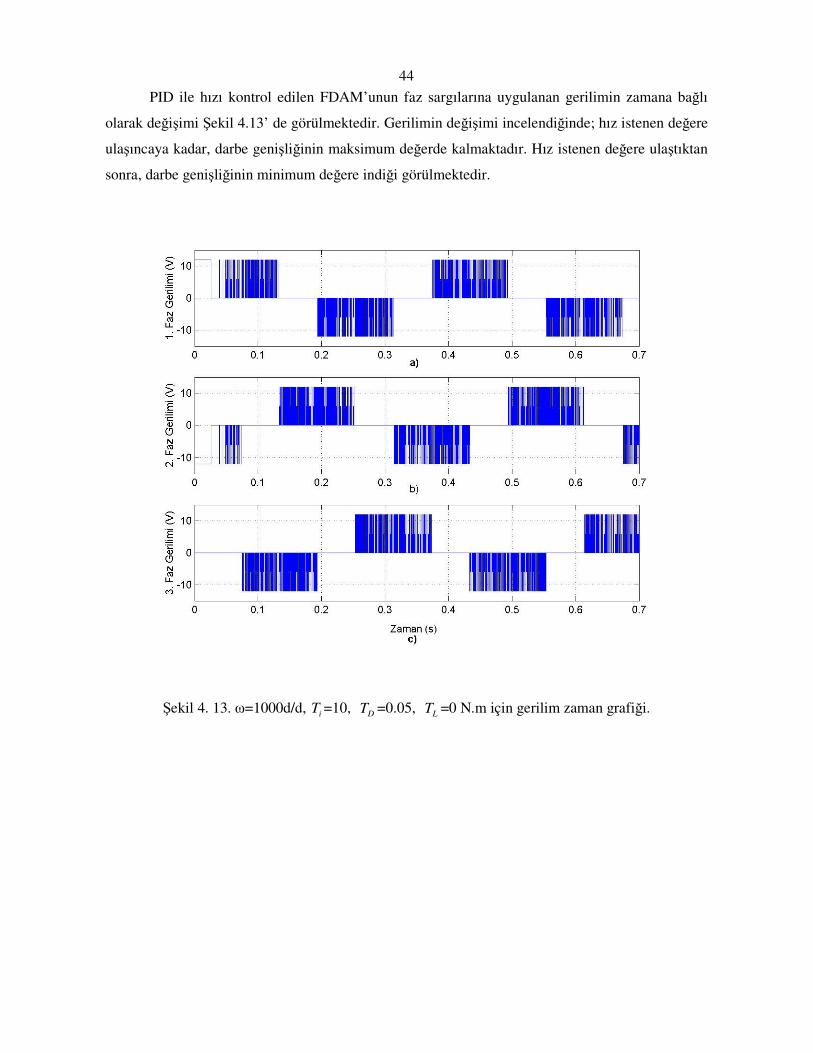
PID ile hızı kontrol edilen FDAM’unun faz sargılarına uygulanan gerilimin zamana bağlı
olarak değişimi Şekil 4.13’ de görülmektedir. Gerilimin değişimi incelendiğinde; hız istenen değere
ulaşıncaya kadar, darbe genişliğinin maksimum değerde kalmaktadır. Hız istenen değere ulaştıktan
sonra, darbe genişliğinin minimum değere indiği görülmektedir.
Şekil 4. 13. ω=1000d/d, iT =10, DT =0.05, LT =0 N.m için gerilim zaman grafiği.

45
PID ile hızı kontrol edilen FDAM’unun faz sargılarından geçen akımın zamana göre
değişimi Şekil 4.14’ de verilmiştir. Şekil 4.14a’ da görüldüğü gibi, akım 0,045s süreyle maksimum
değerde kalmaktadır. Bu süre, hızın maksimum değere ulaşma süresidir. Hız istenen değere
ulaştıktan sonra, akımda yüksek frekanslı gürültü oluşmaktadır. Akımdaki bu dalgalanma, gerilimin
dalgalanması sonucu oluşmaktadır. Akımdaki dalgalanma, momentte ve hızda yüksek frekanslı
gürültü oluşturmaktadır.
Şekil 4. 14. ω=1000d/d, iT =10, DT =0.05, LT =0 N.m, için akım zaman grafiği.

46
PID ile kontrol edilen motora, 0.5 N.m’ lik bir yük bindirildiği zaman, hız ve momentin
zamana göre değişim eğrisi Şekil 4.15 de görülmektedir. Şekil 4.15.a’ da; hızın aşma miktarının,
yüksüz duruma göre azaldığı görülmektedir. Bunun yanında sistemin yükü arttırıldığında,
momentin yük ve atalet momentini karşılayacak değerde kaldığı ve bu noktada yüksek frekanslı
gürültü oluştuğu gözlenmektedir.
Şekil 4. 15. ω=1000 d/d ve LT =0.5 N.m için a)hız ve b)moment grafiği.

47
Sisteme yük uygulandığında faz gerilimlerinin değişim eğrisi Şekil 4.16’da görülmektedir.
Bu grafikten gerilimin yükün artmasıyla birlikte uygulanan gerilimin darbe genişliği arttığı
gözlenmektedir.
Şekil 4. 16. ω=1000 d/d ve LT =0.5 N.m’ lik yükle yüklü olduğu durumda gerilim grafiği.
48
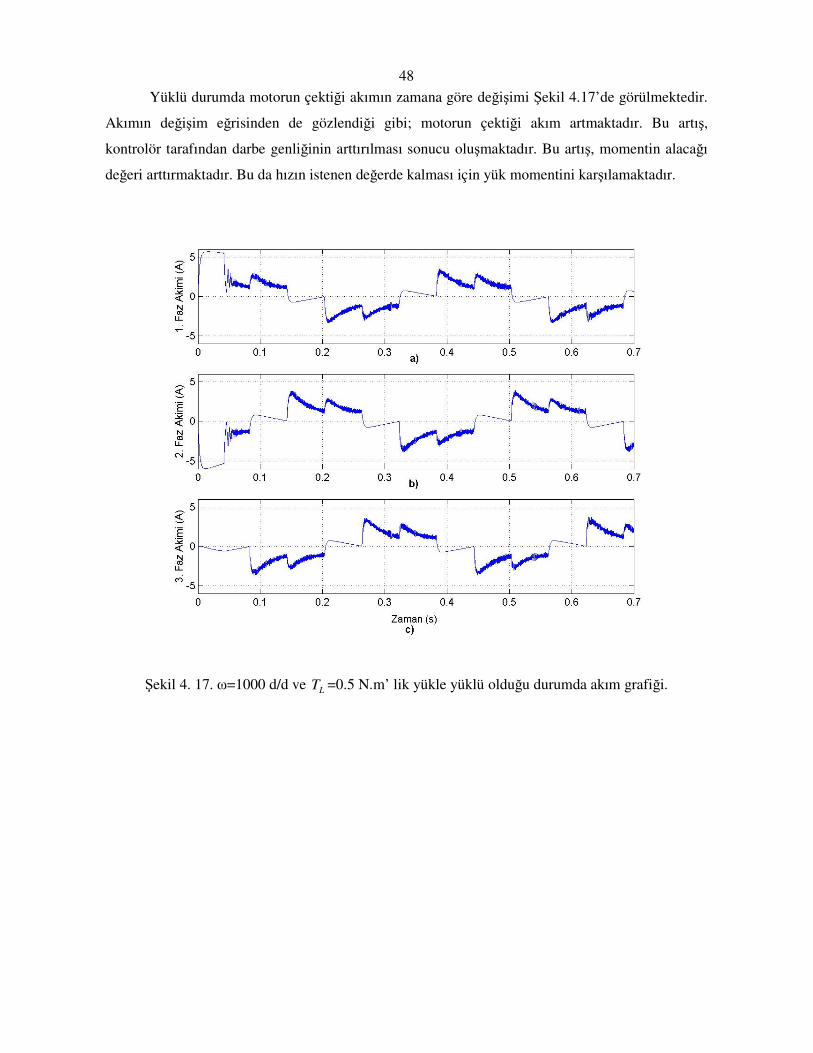
Yüklü durumda motorun çektiği akımın zamana göre değişimi Şekil 4.17’de görülmektedir.
Akımın değişim eğrisinden de gözlendiği gibi; motorun çektiği akım artmaktadır. Bu artış,
kontrolör tarafından darbe genliğinin arttırılması sonucu oluşmaktadır. Bu artış, momentin alacağı
değeri arttırmaktadır. Bu da hızın istenen değerde kalması için yük momentini karşılamaktadır.
Şekil 4. 17. ω=1000 d/d ve LT =0.5 N.m’ lik yükle yüklü olduğu durumda akım grafiği.

49
4.3.2. Uygulama
Uygulama çalışmasında; FDAM’ unun kontrolsüz ve PWM yöntemiyle bilgisayar üzerinden
hız ayarı yapılmıştır. Farklı darbe genliğine sahip gerilimler uygulanarak; hız, akım ve gerilim
değişimi gözlenmiştir. Uygulama işlemi için Visual Basic 6.0 programıyla yazılım oluşturulmuş ve
bilgisayarla motorun hız ayarı yapılmıştır. Uygulama düzeneğinin görüntüsü Şekil 4.18’ de
verilmiştir.
Bu uygulama ile FDAM’ unun hızının, PWM yöntemiyle değiştirilebildiği ispatlanmıştır.
Yine uygulama çalışmasında; akım ve gerilim değişimi, Agilent 54622A model bir osilaskop ile
izlenmiştir. Osilaskopun, bilgisayar bağlantısı ile ekran görüntüsü bilgisayara aktarılmıştır. Motorun
çektiği akımın değişim eğrisini elde edebilmek için, sargılara seri bir direnç bağlanmıştır. Motorun
çektiği akım, direnç üzerinden geçtiğinde, direnç üzerinde gerilim düşümüne neden olur. Bu gerilim
düşümü, akımın ve bağlı olan seri direncin değerine bağlıdır. Seri direnç değeri sabit olduğundan,
direnç üzerinde düşen gerilimin değeri akımın değişimini gösterir. Buradaki direnç değeri, 0.5 Ω
dur. Bu nedenle, çekilen akım osilaskoptan okunan değerin 2 katı kadardır.
Şekil 4. 18. FDAM’ nun hız kontrol uygulama düzeneği.
50
Motorun güç beslemesi için (maksimum 30V ve 2A çıkış veren) Nel marka güç kaynağı
kullanılmıştır. Güç kaynağı, 15V değerine ayarlanmıştır. Güç kaynağının akım ayar düğmesiyle
akım, maksimum değerin biraz altına ayarlanmıştır. Bunun nedeni; güç kaynağının sigortasının
atmasının önlenmesidir.
Uygulamada kullanılan motor dört kutuplu, hall effect sensörlü FDAM’ udur. Bu motorda
maksimum 50W güç üretmektedir.
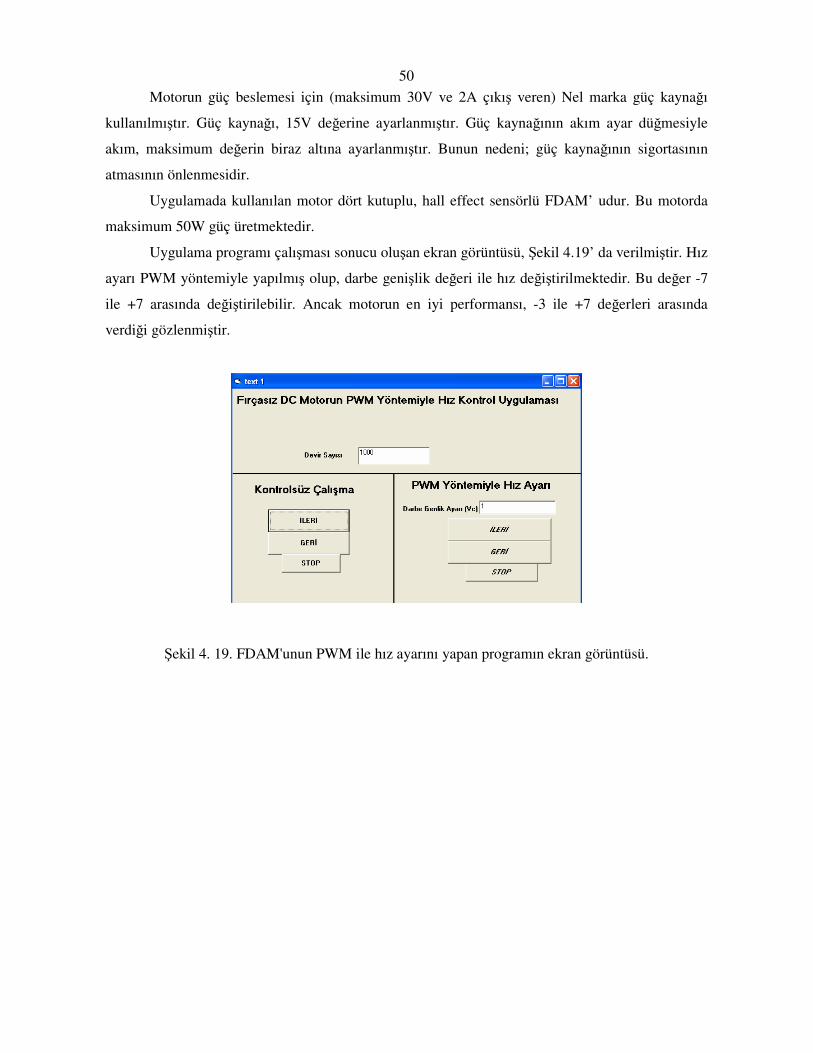
Uygulama programı çalışması sonucu oluşan ekran görüntüsü, Şekil 4.19’ da verilmiştir. Hız
ayarı PWM yöntemiyle yapılmış olup, darbe genişlik değeri ile hız değiştirilmektedir. Bu değer -7
ile +7 arasında değiştirilebilir. Ancak motorun en iyi performansı, -3 ile +7 değerleri arasında
verdiği gözlenmiştir.
Şekil 4. 19. FDAM'unun PWM ile hız ayarını yapan programın ekran görüntüsü.

51
FDAM’ unun kontrolsüz olarak çalışması sonucu, elde edilen gerilim değişim grafiği Şekil
4.20’ de verilmiştir.
Şekil 4.20’ de görüldüğü gibi; motorun ilk kalkış anında birinci faz sargısına uygulanan
gerilimin süresinin uzun olduğu görülmektedir. Bu değişimle, kontrolsüz olarak çalışan motorun
simülasyonu olan Şekil 4.4 karşılaştırıldığında, sonucun birbirlerine benzediği gözlenir. Bu da
yapılan modellemenin başarısını göstermektedir.
Şekil 4. 20. FDAM' unun kontrolsüz çalışmada fazlara uygulanan gerilimin değişimi.

52
FDAM’ unun çektiği akımın değişim eğrisi Şekil 4.21’ de verilmiştir. Burada akımın faz
geçişleri sırasında, atlama yaptığı gözlenmektedir. Bu atlama, motorun faz sargılarının
indüktansından kaynaklanmaktadır. Yine bu şekilde, gerilimlerin faz farkından dolayı akımlar
arasında 120° faz farkı oluştuğu gözlenmektedir. Osilaskoptan okunan yatay her çizgi 200 mV ve
motora seri bağlı direnç değeri 0.5 Ω olduğundan, okuma yaparken yatay çizgilerin her birinin
değeri 400 mA dir. Kontrolsüz çalışma simülasyon sonucu olan Şekil 4.5, Şekil 4.21
karşılaştırıldığında akımın faz geçişleri sırasında yine dalgalanma olduğu gözlenmektedir. Motorun
prototip olarak üretilmesinden dolayı, gücünün düşük olması, yapısal hatalar ve uygulamada sistem
ideal olmadığından dolayı simülasyondan farklı gözükmektedir. Faz geçişleri sırasında akımda
dalgalanma olduğu, akımın kalkış anında maksimum değerde kaldığı ve akımlar arasında 120° faz
farkı olduğu gözlenmektedir.
Şekil 4. 21. FDAM' unun kontrolsüz çalışmada faz sargılarından geçen akımın değişim şekli.

53
FDAM’ unun bir fazına 5=cV V için uygulanan gerilimin darbeli yapısı, Şekil 4.22’ de
verilmiştir. Gerilimin 0, -15V ve 15V arasında anahtarlandığı ve darbe genliğinin büyük olduğu, bu
osilaskop sonucundan da gözükmektedir. Bu sonuçla simülasyon sonucu, benzerlik göstermektedir.
Motorun PWM yöntemiyle kontrolü sırasında motorun çektiği akımın değişimi Şekil 4.23’
de verilmiştir. Akımın değişimi incelendiğinde, yine faz geçişleri sırasında maksimum değere
ulaştığı gözlenmektedir. Akımın aldığı bu değer ile Şekil 4.22’ deki gerilim karşılaştırıldığında;
gerilimin 0V ile 15V arasında anahtarlanması sırasında, akımın arttığı gözlenmektedir. Gerilim,
15V’ dan 0V’ a düşürüldüğünde ise akımın azaldığı gözlenmektedir. Böylelikle, akımın alacağı
ortalama değer azalır.
Şekil 4. 22. FDAM' unun PWM ile kontrolünde 5=cV V için uygulanan gerilimin değişimi.
Şekil 4. 23. FDAM' unun PWM ile kontrolünde 5=cV V için motorun çektiği akımın değişimi.

54
Kontrol değeri ( cV ) 0 için motorun bir fazına uygulanan gerilimin değişim eğrisi Şekil 4.24’
de verilmiştir. Şekilde görüldüğü gibi, motora darbeli bir gerilim uygulanmıştır. Bu değişim grafiği,
Şekil 4.22 ile karşılaştırıldığında darbe genliğinin azaldığı gözlenmektedir. Bu azalma, motora
uygulanan ortalama gerilim değerini azaltır.
Şekil 4. 24. FDAM' unun PWM ile kontrolünde 0=cV V için uygulanan gerilimin zamana göre
değişimi.

55
Motorun PWM yöntemiyle hız ayarı yapılırken, 0=cV V değeri için motorun bir fazından
geçen akımın değişimi Şekil 4.25’ de verilmiştir. Bu grafikten de anlaşıldığı gibi, motor darbeli
çalışırken yüksek frekanslı gürültü oluşmaktadır. Bu gürültü, motorun ürettiği momentte ve hızda
dalgalanmalara neden olmaktadır. Şekil 4.25 ile Şekil 4.23 karşılaştırıldığında, gerilimin genliğinin
azalması motorun çektiği akımın genliğini doğrudan etkilemektedir. Bu azalma, motorun ürettiği
momenti ve hızı azaltır.
Şekil 4. 25. FDAM' unun PWM ile kontrolünde 0=cV V için motorun çektiği akımın osilaskop
çıktısı.

5. TARTIŞMA ve SONUÇ
Chen ve Tang (1999)’ e göre PWM ile akım kontrolü, bir çok dezavantaja sahiptir. Bunların
başında akımda oluşan yüksek frekanslı gürültü gelmektedir. Bu gürültü, anahtarlama frekansına
bağlı olarak değişşmektedir. Uygulama ve simülasyon çalışmasının her ikisinde de yüksek frekanslı
gürültüler gözlenmiştir.
Utkin ve ark. (1999)’ a göre FDAM’ larında kullanılan sürücü ve sensör bu motorların her
yerde ekonomik olarak kullanımını engellemektedir. Bu çalışmada da sürücü ve hall effect
sensörleri kullanılmıştır. Ama hız kontrolünün de bu sürücü ve sensörlerle yapıldığı için hız
kontrolü için kullanımı oldukça ekonomiktir.
Duru ve Arı (2005)’ya göre, PC paralel portu kullanılarak birçok güç elektroniği devresi
gerçekleştirmek mümkündür. Bu şekilde oluşturulan bir deney setiyle ekonomik olarak güç kontrol
deneyleri yapılabilir. Bu çalışmada da PC’ nin paralel portu kullanılarak sürücü devresi
gerçekleştirilmiştir. Bu şekilde bu uygulama için ekonomik bir deney seti yapılmıştır..
Sonuç olarak bu çalışmada, FDAM’ unun kontrolsüz olarak; hız, akım, gerilim ve
momentinin anlık değişimi, yüklü ve yüksüz durumda incelenmiştir. Simülasyon çalışmasında;
farklı darbe genliğine sahip gerilim uygulanarak hız, gerilim, akım ve momentin değişimi
izlenmiştir. Yine simülasyon çalışmasında; darbe genliğini PID kontrolör uygulayarak otomatik
ayarlayan, bir hız kontrol siteminin başarımı gözlenmiştir. Bu çalışmanın uygulama aşamasında ise;
sistem kontrolsüz çalıştırılarak, doğrultucudan çekilen akım ve uygulanan gerilim değişimi
incelenmitir. Yine uygulamada, sisteme farklı darbe genliğine sahip gerilimler uygulanmış; akım ve
gerilim dalga şekilleri simülasyondan elde edilen sonuçlarla karşılaştırılmıştır.
Sonuç olarak; motorun matematiksel modelinden yararlanılarak yapılan simülasyon ve
uygulama çalışmalarından elde edilen sonuçlar bize; bu motorda kullanılan işlemci ve sürücü
devresi yardımıyla hızın ayarlanabileceğini veya kontrol edilebileceğini göstermiştir.
FDAM’ unun, veriminin ve güç/ağırlık oranının yüksek olması gibi avantajları göz önüne
alınarak kullanımı artırılmalıdır. Bu motorların, hız değişimi gerekmeyen ve yük değişimi olmayan
yerlerde (buzdolabı, kompresör v.b), kontrolsüz olarak kullanımı uygundur. Farklı hız
kademelerinde kullanımı için; sürücüde bulunan işlemciye, bir kaç komut eklenerek basit bir
şekilde hız ayarı yapılabilinir. Bu hız kademelendirilmesi işlemi PWM yöntemiyle sağlandığından,
yüksek verimle bu işlem gerçekleştirilmiş olur. Yine bu işlemciye eklenecek komutlar sayesinde,
PID veya istenilen kontrolör uygulaması gerçekleştirilerek, hız kontrolü yapılabilir. Burada oluşan
dezavantaj; moment ve akımda, yüksek frekanslı gürültü oluşması ve motorun kalkış süresinin
uzamasıdır. Gürültünün farklı kontrol yöntemleri ve çeşitli filtre yöntemleriyle aşılabileceği
düşünülmektedir. Kalkış süresinde uzama, normal çalışmada motorun faz sargılarına uzun süre aşırı

57
akım geçmesi nedeniyle istenmeyen bir durumdur. Bu uygulamada, motor akımı PWM yöntemiyle
sınırlandırılmaktadır. Bu sürenin uzamasından dolayı, motor herhangi bir zarara uğramayacaktır.
Bu motorların bulunan sürücü sistemleriyle, FDAM’ larının hız kontrol uygulamalarında
kullanımı sağlanabilir. Bu şekilde FDAM’ un hem veriminden, hem güç ağırlık oranı gibi
üstünlüklerinden yararlanılır. Bunun dışında, ekonomik ve verimli bir kontrol işlemi de yapılmış
olur.

58
KAYNAKLAR Abut, N., 2001. Güç Elektroniği. Kocaeli Üniversitesi, 43, Kocaeli. 355.
Atan, Ö., 2004. Bilgisayar kontrollü endüstriyel otomasyon sistemi. Endüstri&Otomasyon, Eylül
(90):26–29.
Bose, B. K., 1997. Power Electronics and Variable Frequency Drives. IEEE Press, New York. 640
Chen, J., Tang, P., 1999. A sliding mode current control scheme for PWM Brushless DC motor
drives. IEEE Transactions on Power Electronics, 14(3): 541–551.
Duru, T., Arı, G., 2005. IR 2130 Tümleşik devresi kullanılarak genel amaçlı bir güç katı tasarımı ve
PC denetimli uzay vektör modülasyonlu asenkron motor sürücüsünün gerçeklenmesi.
Kaynak Elektrik, Haziran(123): 118–122.
Ellis ,G., 2000. Control System Design Guide. Second edition. Academic Press, USA. 456 .
Ertuğrul, N., Acarnley, P.,1994. A new algorithm for sensorless operation of permanent magnent
motors. IEEE Transaction on Industrial Applications, 30(1): 126–133.
Hashimoto, H., Yamamoto, H., Yanagisawa, S., Harashima, F., 1988. Brushless servo motor control
using variable structure approach. IEEE Transaction on Industrial Applications,
24(1):160–170.
Kurtulan, S., 2001. PLC ile Endüstriyel Otomasyon. Birsen Yayınevi. İstanbul. 373.
Rigby, W.H., Dalby, T.,1995. Computer Interfacing. Prentice Hall. USA 232.
Tuncer, S., Tatar, Y., 2004. Üç-fazlı 5-seviyeli kaskad inverter tasarımı ve gerçekleştirilmesi. Fırat
Üniversitesi Fen ve Mühendislik Bilimleri Dergisi 16(4) 702–717.
Utkin, V., Guldn, J.,Shi, J., 1999. Sliding Mode Control in Electromechanical System.
Taylor&Francis. USA.325.
Yüksel, İ., 2001. Otomatik Kontrol Sistem Dinamiği ve Denetim Sistemleri. Birsen Yayınevi.
İstanbul.357.
59
EKLER
Ek 1 Simülasyon Komutları for n=1:10000;
ss=5*tan(sin(h*n*100));
ds=con-ss;
if ds>0
V=V9;
end
if ds<0
V=0;
end
ia1=ia;
ib1=ib;
ic1=ic;
if teta<=60
Va=V;Vb=(-1)*V;Vc=0;
ea=Kp*W*teta/60;eb=(-1)*Kp*W;ec=Kp*W*(1-(teta/60));
ba=Kp*teta/60;bb=(-1)*Kp;bc=Kp*(1-(teta/60));
end
if (60<teta)&(teta<=120)
Va=V;Vb=0;Vc=(-1)*V;
ea=Kp*W;eb=Kp*W*(((teta-60)/60)-1);ec=Kp*W*(60-teta)/60;
ba=Kp;bb=Kp*(((teta-60)/60)-1);bc=Kp*(60-teta)/60;
end
if (120<teta)&(teta<=180)
Va=0;Vb=V;Vc=(-1)*V;
ea=Kp*W*(1-((teta-120)/60));eb=Kp*W*((teta-120)/60);ec=(-1)*Kp*W;
ba=Kp*(1-((teta-120)/60));bb=Kp*((teta-120)/60);bc=(-1)*Kp;
end
if (180<teta)&(teta<=240)
Va=(-1)*V;Vb=V;Vc=0;
ea=Kp*W*((180-teta)/60);eb=Kp*W;ec=(((teta-180)/60)-1)*Kp*W;

60
ba=Kp*((180-teta)/60);bb=Kp;bc=(((teta-180)/60)-1)*Kp;
end
if (240<teta)&(teta<=300)
Va=(-1)*V;Vb=0;Vc=V;
ea=(-1)*Kp*W;eb=Kp*W*(1-((teta-240)/60));ec=((teta-240)/60)*Kp*W;
ba=(-1)*Kp;bb=Kp*(1-((teta-240)/60));bc=((teta-240)/60)*Kp;
end
if (300<teta)&(teta<360)
Va=0;Vb=(-1)*V;Vc=V;
ea=Kp*W*(((teta-300)/60)-1);eb=(-1)*Kp*W*((teta-300)/60);ec=Kp*W;
ba=Kp*(((teta-300)/60)-1);bb=(-1)*Kp*((teta-300)/60);bc=Kp;
end
k1=(1/L)*(Va-(R*ia)-ea);k2=(1/L)*(Va-(R*k1*h/2)-ea);k3=(1/L)*(Va-(R*k2*h/2)-ea);
k4=(1/L)*(Va-(R*k3*h)-ea);
L1=(1/L)*(Vb-(R*ib)-eb);L2=(1/L)*(Vb-(R*L1*h/2)-eb);L3=(1/L)*(Vb-(R*L3*h/2)-eb);
L4=(1/L)*(Vb-(R*L3*h)-eb);
M1=(1/L)*(Vc-(R*ic)-ec);M2=(1/L)*(Vc-(R*M1*h/2)-ec);M3=(1/L)*(Vc-(R*M2*h/2)-ec);
M4=(1/L)*(Vc-(R*M3*h)-ec);
ia=ia1+((h/6)*(k1+(2*k2)+(2*k3)+k4));ib=ib1+((h/6)*(L1+(2*L2)+(2*L3)+L4));
ic=ic1+((h/6)*(M1+(2*M2)+(2*M3)+M4));
Te=ia*ba+ib*bb+ic*bc;
N1=(1/J)*(Te-Tl-(B*W));N2=(1/J)*(Te-Tl-(B*N1*h/2));N3=(1/J)*(Te-Tl-(B*N2*h/2));
N4=(1/J)*(Te-Tl-(B*h*N3));W=W+((h/6)*(N1+(2*N2)+(2*N3)+N4));
W1=W*180/pi;
teta=teta+(W1*h);
if teta<=360
teta=teta;
end
if teta>360
teta=teta-360;
end
t=n*h;
axis([0 6500 0 2]);
plot(zaman,hiz);

61
Ek 2
Uygulama Komutları
Private Sub Command1_Click()
n = Text1.Text
For i = 0 To n
a = Inp(&H379)
a = a Xor 128
If (a = 223) Then
Out &H378, 36
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 159) Then
Out &H378, 6
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 191) Then
Out &H378, 18
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 63) Then
Out &H378, 24
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 127) Then
Out &H378, 9
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 95) Then
Out &H378, 33
a = Inp(&H379)
a = a Xor 128
Else
End If

62
Private Sub Command3_Click()
n = Text1.Text
For i = 0 To n
a = Inp(&H379)
a = a Xor 128
If (a = 127) Then
Out &H378, 24
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 63) Then
Out &H378, 18
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 191) Then
Out &H378, 6
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 159) Then
Out &H378, 36
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 223) Then
Out &H378, 33
a = Inp(&H379)
a = a Xor 128
ElseIf (a = 95) Then
Out &H378, 9
a = Inp(&H379)
a = a Xor 128
Else
Out &H378, 0
End If
Next
Out &H378, 0; End Sub

63
ÖZGEÇMİŞ
1983 de Van’ da dünyaya gelen Özkan ATAN, ilk ve orta öğretimini Van’ da tamamladı.
Van Teknik Lise ve Endüstri Meslek Lisesi Elektrik bölümünden 1999 yılında mezun oldu. 2000
yılında Fırat Üniversitesi, Teknik Eğitim Fakültesi Elektrik Eğitimi bölümünü kazandı. 2004
yılında, bu bölümden mezun oldu. 2005 yılında, Yüzüncü Yıl Üniversitesi Elektrik Elektronik
Mühendisliği Bölümünde yüksek lisans eğitimine başladı. Üniversiteyi bitirdikten sonra, vekil
öğretmen ve özel bir şirkette teknik uzman olarak görev yaptı.