historia y tipos de robots
DESCRIPTION
RobotsTRANSCRIPT

Historia y conceptos básicos Ing. Juan Felipe Medina Lee
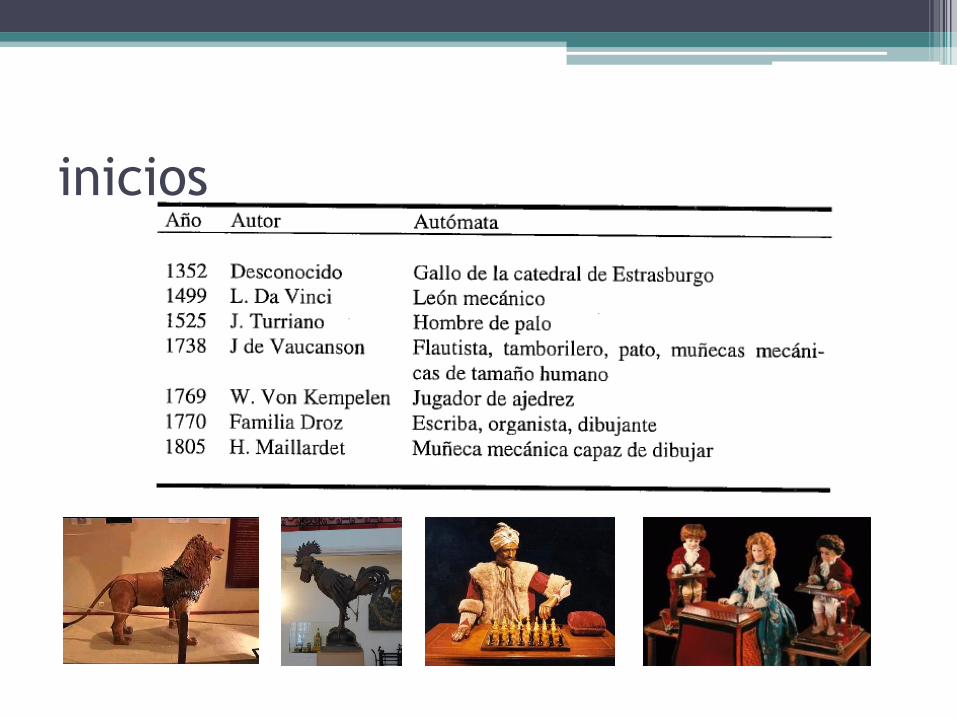
inicios
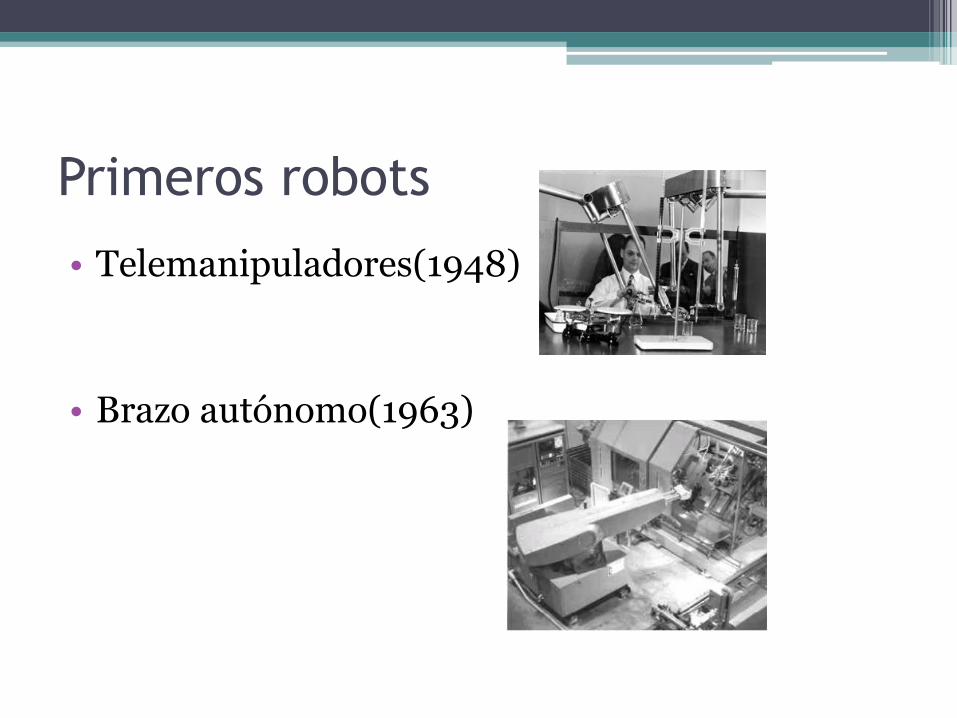
Primeros robots
• Telemanipuladores(1948)
• Brazo autónomo(1963)

Primeros robots
• Se fundaron las primeras asociaciones de robótica
▫ JIRA (japón,1972)
▫ RIA (EUA, 974)
▫ ASEA(estocolmo, 1980)
• En los últimos 30 años la robótica ha evolucionado vertiginosamente en diferentes campos de acción.

Fases de la evolución de la robótica
• En 2008, el mercado de la robótica movió 6.200
millones de dólares con 113.000 unidades vendidas
• Hasta el momento, se han vendido mas de 1 millón de robot industriales en todo el mundo
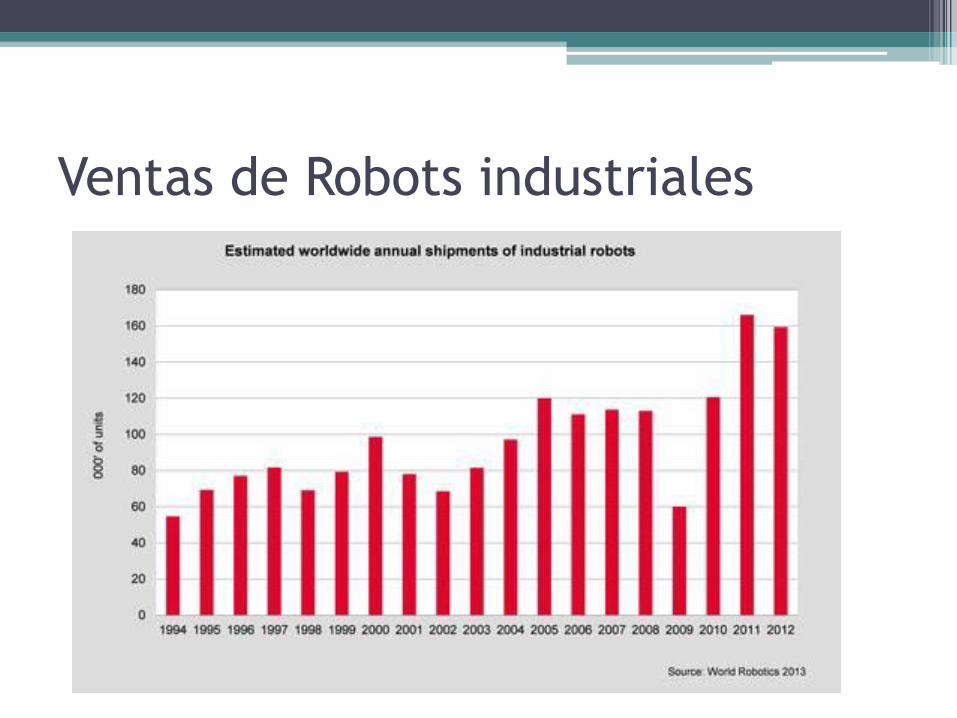
Ventas de Robots industriales
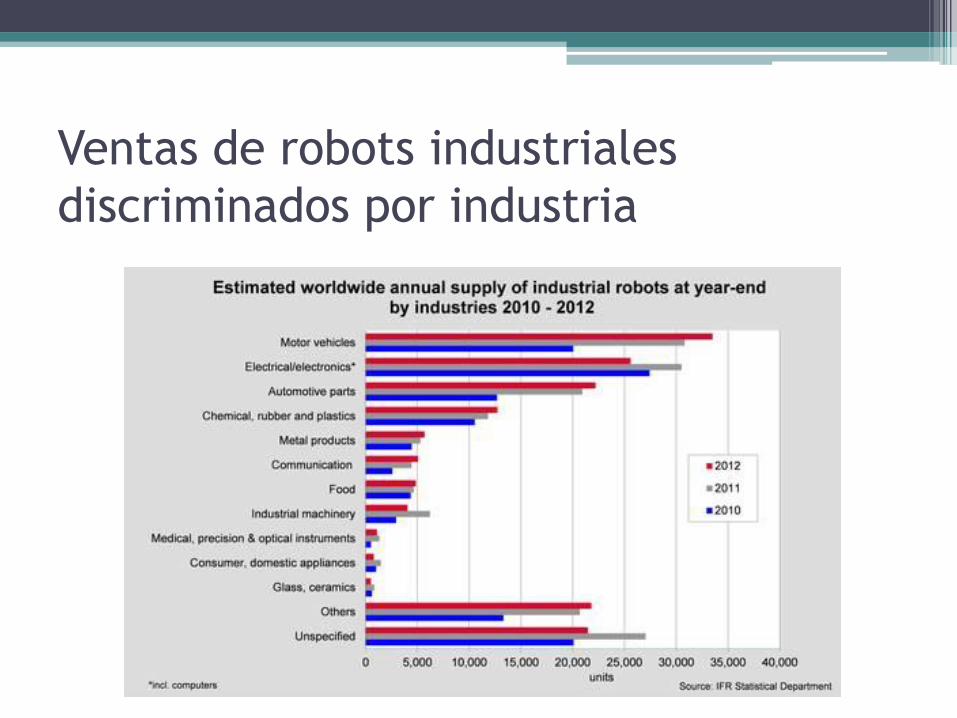
Ventas de robots industriales
discriminados por industria
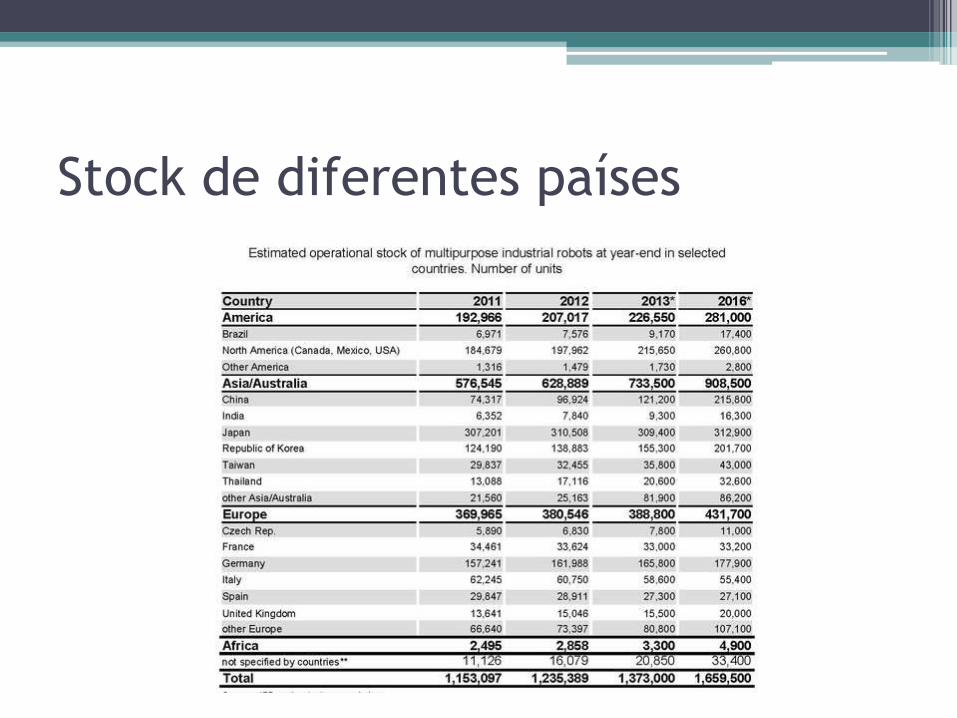
Stock de diferentes países

Generaciones de los robots
• Primera generación: Los robots manipuladores. Estos robots son multifuncionales y poseen un sencillo sistema de control para poder operarlos.
• Segunda generación: robot industrial clásico. Repite gestos enseñados.
• Tercera generación: Cuentan con sensores capaces de relacionarlos con el ambiente y actuar en consecuencia.
• Cuarta generación: Robots capaces de tomar decisiones y adaptarse a situaciones complejas no previstas. Miden el impacto de sus acciones en el ambiente.

Tipos de robots
• De acuerdo a su funcionalidad, los robots se pueden dividir en dos grandes categorías
▫ Robótica de servicio
▫ Robótica industrial
Robótica de servicio
• Robots que funcionan en un ambiente diferente a la industria, para prestar un servicio a las personas.
• Trabajan en ambientes, al menos, parcialmente desconocidos
• Generalmente son tele operados

Aplicaciones de la robótica de servicio

Aplicaciones de la robótica de servicio


Robots industriales
• Aunque se pueden clasificar bajo diversos criterios, aquí los vamos a dividir en dos categorías:
▫ Robots industriales móviles
▫ Robots industriales fijos
Robots industriales móviles
• Dispositivos mecánicos programables capaces de moverse por si mismos (al menos en cierto grado) en un ambiente industrial
• Tienen tres grados de libertad.
• Hay diferentes configuraciones motrices para ellos

Robots guiados por rieles

Robots filoguiados

Vehículos autoguiados (AGV)

Estructura de un robot industrial

Unidad de programación
• La parte mas sencilla del robot, algunos comandos y visualización de estado.
Sistema de control
• Recibe comandos y controla la parte mecánica del robot.
▫ Tarjetas D/A para dar la salida de control
▫ Tarjetas de etapa de potencia para alimentación de los motores del robot
▫ Tarjetas de adquisición para leer los sensores propioceptivos
▫ Entradas y salidas digitales
▫ Tarjetas D/A y A/D para entradas y salidas analógicas
▫ Tarjetas de comunicación (serie, ethernet, paralelo,…)
¿Qué contiene?

Actuadores
• El movimiento de las articulaciones del robot se realiza mediante los actuadores
• Según la fuente de energía del actuador, se pueden distinguir 3 tipos:
▫ Actuadores neumáticos
▫ Actuadores Hidráulicos
▫ Motores eléctricos

Actuadores neumáticos
• Son impulsador por aire comprimido
• Generalmente son utilizados en sistemas de tipo todo o nada, como pinzas

Actuadores Hidráulicos
• Tienen configuración similar a los neumáticos, pero con líquidos como fuente de energía.
Motores eléctricos
• La mayoría de robots industriales los utiliza hoy en día por su precisión y control.
▫ Motores paso a paso
▫ Motores DC
▫ Motores AC

¿Preguntas?