iii. 複雑系基礎 - bonryu.combonryu.com/bonryu/lecture_files/tcse6.pdf · iii. 複雑系基礎...
TRANSCRIPT

III. 複雑系基礎
6.2次微分系
7.カオス
8.フラクタルと次元
9.繰り込みとマルチスケール
10.複雑系と情報
6.2次微分系!自律系と非自律系・自律系 (Autonomous System) 運動方程式の力の項に時間を陽に含まない・非自律系(Non-Autonomous System) 運動方程式の力の項に時間を陽に含む!線形強制振動と非線形強制振動・線形強制振動 外力の無い系の一般解と外力のある系の特解 の重ね合わせ・非線形強制振動 重ね合わせができない

6.1 相空間解析
解析手順A) ダイナミクスの全ての不動点(平衡点、特異点)の位置を定めるB) 不動点の近傍の流れの性質(不動点周りの線形解析)C) 流れの大域的性質の数値解析D) 積分因子が見つかることもある⇨積分可能E) 軌道に沿った時間依存性の数値積分
6.1.1 不動点の決定 自律系について考える 次のような連立1次方程式にして考える
dx
dt= H(x,y)
dy
dt= R(x,y)
・単振子の運動方程式
d2!
dt2+
g
!sin! = 0
"
! = x
dx
dt= y,
dy
dt= #
g
!sinx = #$ 2
sinx
dx
dt= H,
dy
dt= R
H = y, R = #$ 2sinx

・(x,y)面における軌道の接線
dy
dx=
dy
dtdx
dt
=R(x,y)
H(x,y)
ただし、特異点 を除く特異点は、平衡点 である
(x ,y )
( ˙ x = 0, ˙ y = 0)
H(x ,y ) = R(x ,y ) = 0
特異点(平衡点、不動点、Fixed Point)を除いて軌道は交叉しない
6.1.2 不動点付近の解
x(t) = x + !x(t)
y(t) = y + !y(t)
dx
dt= H(x,y),
dy
dt= R(x,y)
dx
dt+
d!x(t)
dt= H(x + !x(t), y + !y(t)) = H(x ,y ) +
"H
"x!x(t) +
"H
"y!y(t) +!
dy
dt+
d!y(t)
dt= R(x + !x(t), y + !y(t)) = R(x ,y ) +
"R
"x!x(t) +
"R
"y!y(t) +!
に代入する
したがって
d!x(t)
dt= "!x(t) + #!y(t) +! " =
dH
dx, # =
dH
dy
d!y(t)
dt= $!x(t) + %!y(t) +! $ =
dR
dx, % =
dR
dy

この方程式の解は
!x(t) = Ae"+t
+ Be"#t
!y(t) =$
"+#%
Ae"+t
+$
"# #%Be"#t
は次式を満たす
!±
!2 " (# + $)! + #$ "%& = 0
' !±
=# + $ ± (# "$)2 + 4%&
2
6.1.3 不動点の分類(軌道の分類)(1)安定平衡点(安定結節点、Stable Node, Simple Point Attractor)
!+, !
"
limt#$
%x = 0, limt#$
%y = 0
:実数で負

(2)不安定平衡点(不安定結節点、Unstable Node, Simple Point Repeller)
!+, !
"
limt#$
%x = $, limt#$
%y = $
:実数で正
(3)鞍点(鞍状点、峠点、Saddle Point)
!+, !
"
!+# !
"< 0
:実数
例えば、 とする
!+
> 0
t !" (e#$t ! 0)
%x ! Ae#+t
%y !&
#+$'
Ae#+t
(
) *
+ *
では
全ての軌道は、直線
!y ="
#+$%
!x に漸近する
この時、
t !"# (e$
+t! 0)
であるから
!x "Be#$t
!y "%
#$ $&Be#$t
'
( )
* )
では
であるから
全ての軌道は、直線
!y ="
#$ $%!x に漸近する
セパラトリックス
単振子相空間軌道

(4)不安定渦状点(焦点、Unstable Focus)
!±
= s ± i"
s > 0
#x = Aestcos("t + $)
#y =Aest
%(s&')cos("t + $) &" sin("t + $){ }
⇨不安定
!± :複素数
(5)安定渦状点(焦点、Stable Focus)
!±
!±
= s ± i"
s < 0
#x = Aestcos("t + $)
#y =Aest
%(s&')cos("t + $) &" sin("t + $){ }
:複素数
⇨安定

(6)渦心点(中心、センター、Center)
!± :純虚数
軌道は全て周期解に対応している相空間内の閉軌道は内側に渦心点を含む
H, Rに小さな変化があると渦状点(4,5)に変化する ⇔ 構造的に不安定
(例)単振子の相空間軌道において(0, 0)は渦心点
6.2 リミットサイクル(アトラクター)ここまでの議論:線形化議論(不動点近傍でのみ有効)
系全体の理解:位相面全体での解析の必要性
6.2.1 リミットサイクル(Limit Cycle) 相空間内の閉曲線:周期挙動に対応 しかし、原方程式の解ではない 実際の解は時間とともに漸近的にリミットサイクルに近づく
*安定なリミットサイクル:アトラクター(Attractor)の一種 近傍の軌道が時間とともにリミットサイクルに近づく*不安定なリミットサイクル:リペラー(Repeller)の一種 時間とともに軌道はリミットサイクルから離れる

6.2.2 センターとリミットサイクル
構造的安定性 近傍の解
センター 不安定 初期条件で決まる
リミットサイクル 安定 全ての軌道を吸引
"リミットサイクルは方程式の性質であって初期条件の反映ではない
6.2.3 リミットサイクルの例
H(x,y) = x + y ! x(x2 + y2)
R(x,y) = !(x ! y) ! y(x2 + y2)
*次の方程式で表される系を考える
*特異点解析
H(x,y) = R(x,y) = 0
(x,y) = (0,0)
s = +1,! =1
したがって、この点は不安定渦状点である
*これ以上の解析を、(x,y)座標で行なうのは困難である ⇨ 円柱座標に変換
x = rcos!, y = rsin!
dx
dt= cos!
dr
dt" rsin!
d!
dt= H
dy
dt= sin!
dr
dt+ rcos!
d!
dt= R
#dr
dt= H cos! + Rsin!
rd!
dt= "H sin! + Rcos!

dr
dt= H cos! + Rsin!
= x + y " x(x2 + y2)[ ]cos! + "(x " y) " y(x2 + y2)[ ]sin!
= r(1" r2)
rd!
dt= "H sin! + Rcos!
= " x + y " x(x2 + y[ ]sin! + "(x " y) " y(x2 + y2)[ ]cos!
= "r
#d!
dt= "1
$dr
dt= r(1" r2)
d!
dt= "1
* r =1
dr
dt= 0
* 0 < r <1
dr
dt> 0
*1< r
dr
dt< 0
軌道は円周
軌道半径は時間とともに増大
軌道半径は時間とともに減少
相平面上で軌道は交わらない ⇩時間の経過とともに軌道は単位円に近づく(リミットサイクル)
(解)
r2
=Ae
2t
1! A + Ae2t, A = r
0
2

6.3 実効ポテンシャル多くの実際的問題では、 連立一次方程式:ではなくて 2階微分方程式:の形で問題が与えられる
dx
dt= H,
dy
dt= R
d2x
dt2
= F(x)
d2x
dt2
= F(x)
dx
dt
d2x
dt2
=dx
dtF(x)
1
2
d
dtt
! dx
dt
"
# $
%
& '
2
dt = F(x)dx
dtt
! dt = F(x)dx = (V(x) + K
x
!
F(x) = (dV
dx
)1
2
dx
dt
"
# $
%
& '
2
= K (V(x)
V(x) : 実効ポテンシャル実効ポテンシャルを知れば相空間軌道の振る舞いは想像できる
(例)
K =1
2
dx
dt
!
" #
$
% &
2
+ V(x)
V(x) = !(x + 2)(x + 0.5)(x !1.9)(x ! 2.1)
x
y =dx
dt
x
V(x)

6.4 捕食者被食者問題捕食者被食者問題:The Predator-Prey Problem
6.4.1 ロジスティック方程式ロジスティック方程式:Logistic Equation
(1)1種個体群のダイナミックス:①指数増殖 小魚 ⇨ プランクトン ウサギ⇨ 草 仮定:えさは無限にある。外敵はいない。
dx
dt= !
1x, x
x = x0e!1t , x
0
!1
> 0
!1
< 0
:個体数(連続量と考える)
:初期個体数個体数増大個体数減少
マルサス係数Thomas Robert Malthus
dx
dt= mx
m
x(t) = x(0)emt
:個体あたりの増加率
(2)1種個体群のダイナミックス :②ロジスティック成長(非線形効果) 資源( 餌 、営巣場所等)の不足 環境悪化⇨病気のまん延、他
dx
dt= !
1x "!
2x2, x
2# 2匹が衝突する確率
ロジスティック方程式
dx
dt= !
1x "!
2x2 #
1
x2dx
dt=!1
x"!
2, x =
1
y
# "dy
dt= !
1y "!
2, "Y = !
1y "!
2
# dY = "!1dy
$ Y = Ae"!1t # x =!1
!2" Ae"!1t
x(0) = x0
# A = !2"!1
x0
x =x0e!1t
1" k1x0
+ k1x0e!1t, k
1%!2
!1
x0
k1!"1
"2
x
tロジスティック曲線
増殖率の低下
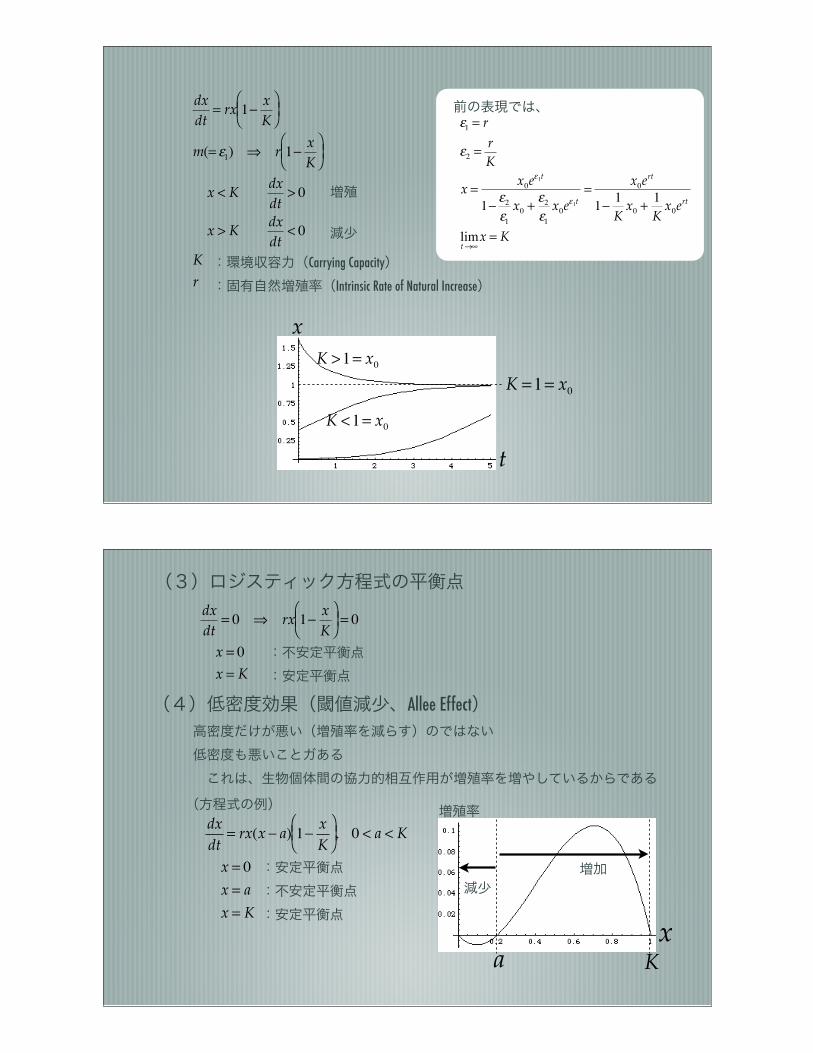
dx
dt= rx 1!
x
K
"
# $
%
& '
m(= (1) ) r 1!
x
K
"
# $
%
& '
x < Kdx
dt> 0
x > Kdx
dt< 0
K
r
増殖
減少
:環境収容力(Carrying Capacity):固有自然増殖率(Intrinsic Rate of Natural Increase)
前の表現では、
!1
= r
!2
=r
K
x =x0e!1t
1"!2
!1
x0
+!2
!1
x0e!1t
=x0e
rt
1"1
Kx0
+1
Kx0e
rt
limt#$
x = K
x
t
K =1= x0
K >1= x0
K <1= x0
(3)ロジスティック方程式の平衡点
dx
dt= 0 ! rx 1"
x
K
#
$ %
&
' ( = 0
x = 0
x = K
:不安定平衡点:安定平衡点
(4)低密度効果(閾値減少、Allee Effect)高密度だけが悪い(増殖率を減らす)のではない低密度も悪いことガある これは、生物個体間の協力的相互作用が増殖率を増やしているからである(方程式の例)
dx
dt= rx(x ! a) 1!
x
K
"
# $
%
& ' , 0 < a < K
x = 0
x = a
x = K
:安定平衡点:不安定平衡点:安定平衡点
減少増加
K
a
x
増殖率

6.4.2 種間競争のダイナミックス
(1)ロトカ・ヴォルテラ方程式(Lotka-Volterra Equation)捕食者 キツネ 大魚被食者 ウサギ 小魚
F(t)
R(t)
F(t),R(t) は、本来、整数であるが、「生物資源」と考えて、微分方程式を作って解析する仮説 1.ウサギの数( )の成長率はキツネの数( )とともに減少
2.キツネの数( )の減少率はウサギの数( )とともに減少
F
F
R
R
dR
dt= (! "#F)R
dF
dt= "($ "%R)F
#, %, !,$ > 0
一般化
˙ N k
= NkF
k(N
1,N
2,...N
K)
Fk
k = 1,2,...K
:リプシッツ条件を満たす
リプシッツ条件
となる について次式を満たす があるとき、 はリプシッツ条件を満たす
! y ,! z ! Rn
! y "! a < a
1,! z "! a < a
1: #(
! a , a
1)$ Rn
t " t0%T + #(
! a , a
1) : D(t
0,! a ;T, a)$ Rn +1
F(! y ,t) " F(
! z ,t) < a
2
! y "! z
! y ,! z
a2
F(! x ,t)

(2)ロトカ・ヴォルテラ方程式の解の相空間挙動
R ! x, F ! y
H(x,y) = (" #$y)x
R(x,y) = #(% #&x)y
'
dx
dt= H(x,y)
dy
dt= R(x,y)
と書き換える
不動点
(x, y) = (0, 0)
(x, y) = (! /", # /$)
:鞍点:センター
実現する全ての解は周期解である
センター
鞍点
セパラトリックス
ウサギ
キツネ
x
y
(3)構造的に安定な方程式ロトカ・ヴォルテラ方程式の解はセンターを持つので構造的に不安定である ⇩生物のモデルとしては不十分である ⇩リミットサイクルを持つモデルを探す
例
H(x,y) = (! "#y)x "kx
x + a
R(x,y) = $y 1"%y
x
&
' (
)
* +
!,#, k,$, % :定数
6.5 非線形強制振動6.5.1 ジャンプ現象
非自律(non-autonomous)系の例として、非線形強制振動を考える
(1)非線形項の効果① 高調波(harmonics)の発生
② 分数調波(sub-harmonics)の発生
③ 2周波数の結合
④ 系の固有周波数との共鳴
⑤ ジャンプ現象、同期現象、引き込み
! f " 2! f , 3! f , 4! f ,!
! f "1
2! f ,
1
3! f ,
1
4! f ,!
!1,!
2" !
1, 2!
1, 3!
1,!
!2, 2!
2, 3!
2,!
!1
± !2, 2!
1± !
2,!
1± 2!
2,!
!0
= m!1
± n!2
m, n
(2)ダフィング方程式(Duffing Equation)① ダフィング方程式
摩擦のある非線形の方程式に外力を加える
d2x
dt2+ 2!
dx
dt+ "
0
2x + #x3 = f0cos($t + %)
② ダフィング方程式の近似解次の形の近似解を考える
x = A1cos!t + A
3cos3!t
ここで、 と仮定する
[1]
A1
>> A3
dx
dt= !"A
1sin"t ! 3"A
3sin3"t
d2x
dt2
= !"2A1cos"t ! 9"
2A3cos3"t
これを、[1]式に代入する
[2]

(!"2A1 cos"t ! 9"2A3 cos3"t) ! 2#(!"A1 sin"t ! 3"A3 sin3"t)
+$0
2(A1 cos"t + A3 cos3"t) + %(A1 cos"t + A3 cos3"t)3
= f0 cos("t + &) = f0 cos"tcos& ! f0 sin"t sin&
ところで、三倍角の公式より
cos3!t = "
3
4cos!t +
1
4cos3!t
また、 は より十分小さいことを考慮して
A1
A3
cos!t "!2A1
+ #0
2A1
+3
4A1
3$ = f0cos%
sin!t " 2&!A1
= " f0sin%
の係数:
の係数:両辺を自乗して和をとれば次式が得られる
A1
2(!
0
2 "#2+3
4$A
1
2)2
+ 4% 2#2& ' (
) * +
= f0
2[3]
1)非線形効果のみ:
f0
= ! = 0
[3]式において、 とする
f0
= ! = 0
(外力も減衰もない)
!2
= "0
2+3
4#A
1
2
実効周波数 は、[2]式で仮定したように であるしたがって、外力が0の極限で
!
!
! = " #!0
+3
8!0
$A1
2
[4]
2)線形強制振動:
! = 0
[3]式において、 とする
! = 0
A1
2=
f0
2
(!0
2 "#2)2
+ 4$ 2#2
既に説明したように、減衰のある線形強制振動の解は次式の通りである
x(t) = ˆ A e!"t cos( #0
2 !$2t + ˆ % ) + f0
(#0
2 !$2)sin($t + &) ! 2"$cos($t + &)
(#0
2 !$2)
2+ 4" 2$2
[5]
で、第1項の効果はなくなり、解は次式であらわされる
!t >>1
x(t) ! f0
cos("t + # + $)
(%0
2 &"2)2
+ 4' 2"2, tan$ = &
2'"
%0
2 &"2
これは[5]式と一致する
[6]
3)ダフィング方程式の解:減衰、非線形性、強制振動が存在ダフィング方程式の解も、 で[6]式と同じような形をとるものとする
!t >>1
[6]式の解において、非線形項を加えると、実効固有振動数 は振幅Aの関数になって となるものと考えることができる( )
!0
!(A)
!0"!(A)
x(t) ! f0
cos("t + #)
($ 2 %"2)2
+ 4& 2"2
= A($)cos("t + #)
[7]
ここで、簡単のため、 とした実効固有周波数:
! = 0
! "!0
+3
8!0
#A2
[8]
4)共鳴周波数付近での振る舞い:ジャンプ現象 を次のように定義する
!
! = "0
+ #$
減衰が小さい場合を考える:
! = O(A)
! 4" 2#2 $ 4" 2%0
2
& (% 2 '#2)2
= (% '#)(% + #)[ ]2 $
3(8%
0
A2 '()
*
+ ,
-
. /
2
(2%0)2
ここで、「 :外力の周波数、 :実効周波数」であることに注意せよ
!
!
したがって、
A2 !f0
2
3"8#
0
A2 $"%&
' (
)
* +
2
(4#0
2) + 4, 2#
0
2
=
f0
2
4#0
2"2&
' (
)
* +
3
8#0
A2 $%&
' (
)
* +
2
+,"
&
' (
)
* +
2
これより、 ならば でなければならない⇨ 「強制項は弱励起である」という
A = O(1)
f0
= O(!)
[9]
[9]式より、次式が得られる
3A2
8!0
3
8!0
A2 "#$
% &
'
( )
2
+*+$
% &
'
( )
2,
-
.
.
/
0
1
1
=3
8!0
f0
2
4!0
2+2[10]

次のような変数を使って[10]式を簡単にする
! "3A2
8#0
F "3 f
0
2
32#0
3$2
%
:振幅
:外力(+非線形効果):周波数のずれ
! (! "#)2 +$%&
' (
)
* +
2,
-
.
/
0
1 = F [11]
!
"= 0.1
F = 0.008
F = 0
!
!
!
!
!
"= 0.5
F = 0.5
F = 0
小非線形性 大非線形性
したがって、非線形性と外力が大きい時の概念図は次のようになる
!
!A 振幅
! = "0
+ #$ (# > 0) 外力周波数
P
PC2
PC1
QQC1
QC2
!1
!2
の場合、外力の周波数を増加させていくと P⇨PC1⇨QC1⇨Q 、減少させると Q⇨QC2⇨PC2⇨P と変化する外力の周波数が、 となる位置で振幅が不連続に変化する(ジャンプ現象)また、周波数増加時と減少時で異なった道筋を通る(履歴現象)
!1,!
2
! > 0

6.5.2 同期現象(引き込み現象)(1)同期現象の例① Huygensの観測(17世紀) 2つの振動体を近接させておくと振動数が一致する② Rayleighの観測 2つの音叉、オルガンの引き込み現象③ 心臓のペースメーカーの機能
これらは、2つの振動体の間の引き込み現象であるが、解析を簡単にするために、強制項による引き込み現象を考えるこの場合、駆動系への反作用は無いしたがって、①の場合のような対称性はないしかし、同期現象(引き込み現象)の基本的アイデアは理解できる
(2)強制 Van der Pol 方程式
強制 Van der Pol 振動子:自己励起システム(Van der Pol振動子等)+周期的外力強制 Duffing 振動子との違い: 自己励起システムの場合強制項が無くともリミットサイクルの周りを振動する
① 強制 Van der Pol 振動子
② 基本方程式
d2x
dt2!"(1! x2)
dx
dt+ #0
2= f0 sin$t, (" > 0) [1]
" Van der Pol 振動子の振動数は、
! = !0
+ O("2)
③ 近似解法Van der Pol 変数( )を導入して、次の形の解を仮定する
a(t), b(t) or A(t),!(t)
x(t) = a(t)cos!t + b(t)sin!t
x(t) = A(t)sin(!t + "(t))
da
dt= O(#),
db
dt= O(#),
dA
dt= O(#),
d"
dt= O(#)
あるいは、
ここで、[2]

x(t) = A(t)sin(!t + "(t))
dx
dt=
dA
dtsin(!t + ") + A(!+
d"
dt)cos(!t + ")
d2x
dt2
=d2A
dt2sin(!t + ") + 2
dA
dtcos(!t + ")(!+
d"
dt)
# A(!+d"
dt)2sin(!t + ") + A
d2"
dt2cos(!t + ")
[3]
[4]
sin!t = sin (!t + ") #"[ ] = sin(!t + ")cos" # cos(!t + ")sin"
ところで、
[5]
[2],[3],[4]式を[1]式に代入する
sin(!t + ")
cos(!t + ")
の係数:
の係数:
d2A
dt2! A "+
d#dt
$
% &
'
( )
2
!* dA
dt+3
4*A2 dA
dt+ +
0
2A! f0cos# = 0
2dA
dt"+
d#dt
$
% &
'
( ) + A
d2#dt2
!*A "+d#dt
$
% &
'
( ) +1
4*A3
+ f0sin# = 0
[6]
[7]
!,dA
dt,
d"
dtは小さいので、これらの自乗及び を省略することができる
d2A
dt2,
d2!
dt2
この結果、
d!dt
="0
2 #$2
2$#
f0
2A$cos!
dA
dt=%21#1
4A2
&
' (
)
* + A#
f0
2$sin!
[8]
[9]
④ 解の解釈強制項のない場合: Van der Pol振動子
!(= ") = !0
+ O(#2)
強制項がある場合:
x(t) = A(t)sin(!t + "(t)) = (A(t0) +!)sin(!t + "(t)) = A(t0)sin#t +!
[10]
⇨ 振動子は系の固有振動数で振動する
⇨ 振動子は外力の振動数で振動する (条件を満たせば!!)

振動子が外力の振動数で振動する(同期現象)条件以下の条件が実現すれば系は強制項の振動数 で振動する⇨ 同期現象(引き込み現象)
dA(t)
dt= 0,
d!(t)
dt= 0
!
[11]
[8]、[9]式に、[11]式を代入して、 を消去すれば次式を得る
!(t)
(!0
2 "#2)2
#2+ $2 1" 1
4A2
%
& '
(
) *
2+
,
-
.
/
0
A2=
f0
2
#2 [12]
これは、同期現象が起こった時の振幅を、振動数と外力の大きさの関数として求める式である と が与えられた時に となるような が存在するためには、[8]式の右辺の の係数が第1項よりも大きいことが必要である
!0
!
d!
dt= 0
!
cos!
!0
2"#
2
2#$
f0
2A#[13]
! = "0#$"
!1
2
f0
A" #$ "
1
2
f0
A[14]
として