it 기반 지능형 로봇의 구현기술동향
DESCRIPTION
04 추계 한국정보과학회 워크샵. IT 기반 지능형 로봇의 구현기술동향. 2004 년 10 월 23 일 조 성 배 연세대학교 컴퓨터과학과. 발표순서. IT 기반 지능로봇 인공지능의 구현기술 응용사례 현재 인공지능 기술의 문제점 향후 발전방향. IT 기반 지능로봇. 예 (1). IT 기반 지능로봇. 예 (2). IT 기반 지능로봇. 예 (3). Competing. Hopping. Swimming. Following. Competing. IT 기반 지능로봇. 예 (4). 기능. - PowerPoint PPT PresentationTRANSCRIPT
1
IT 기반 지능형 로봇의 구현기술동향
2004 년 10 월 23 일
조 성 배연세대학교 컴퓨터과학과
04 추계 한국정보과학회 워크샵

2
발표순서
• IT 기반 지능로봇
• 인공지능의 구현기술
• 응용사례
• 현재 인공지능 기술의 문제점
• 향후 발전방향
3
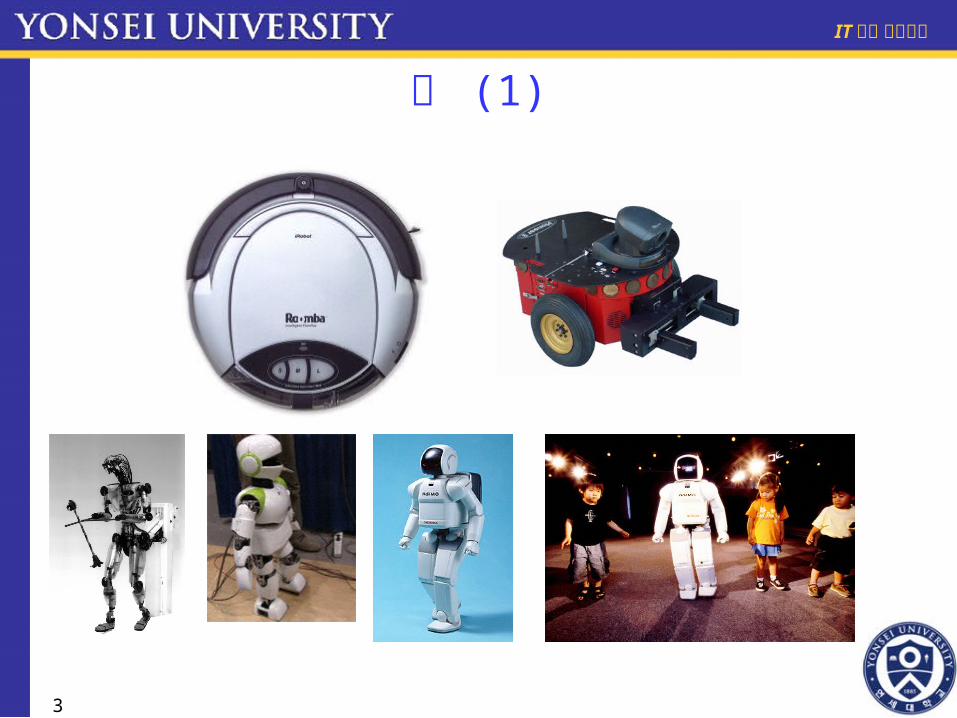
예 (1)
IT 기반 지능로봇

4
예 (2)
IT 기반 지능로봇
5
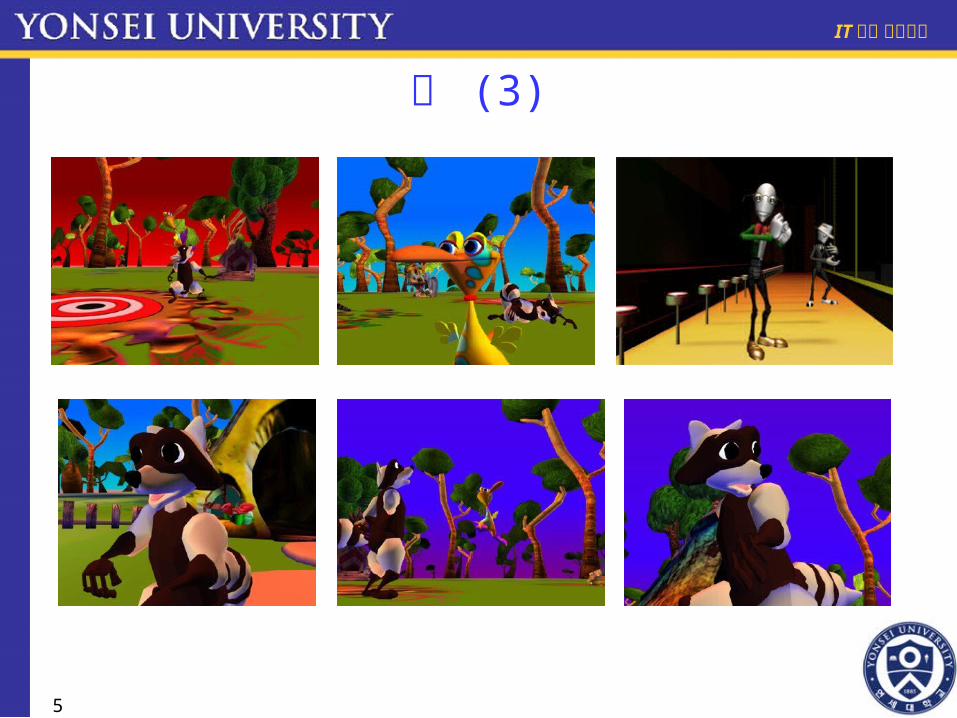
예 (3)
IT 기반 지능로봇
6
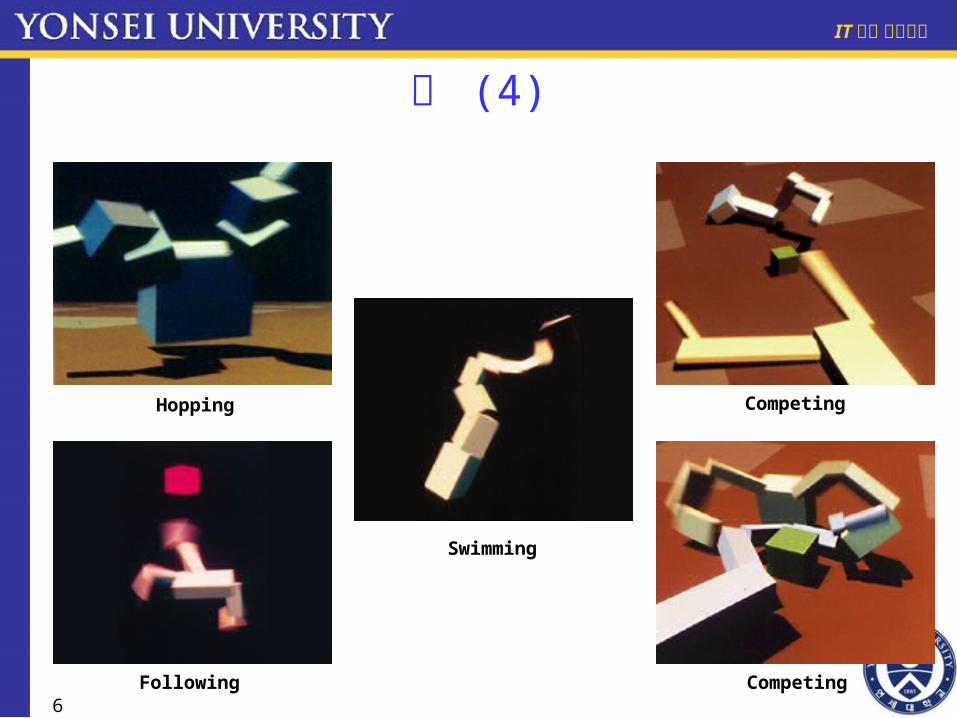
예 (4)
Hopping
Following
Swimming
Competing
Competing
IT 기반 지능로봇
7
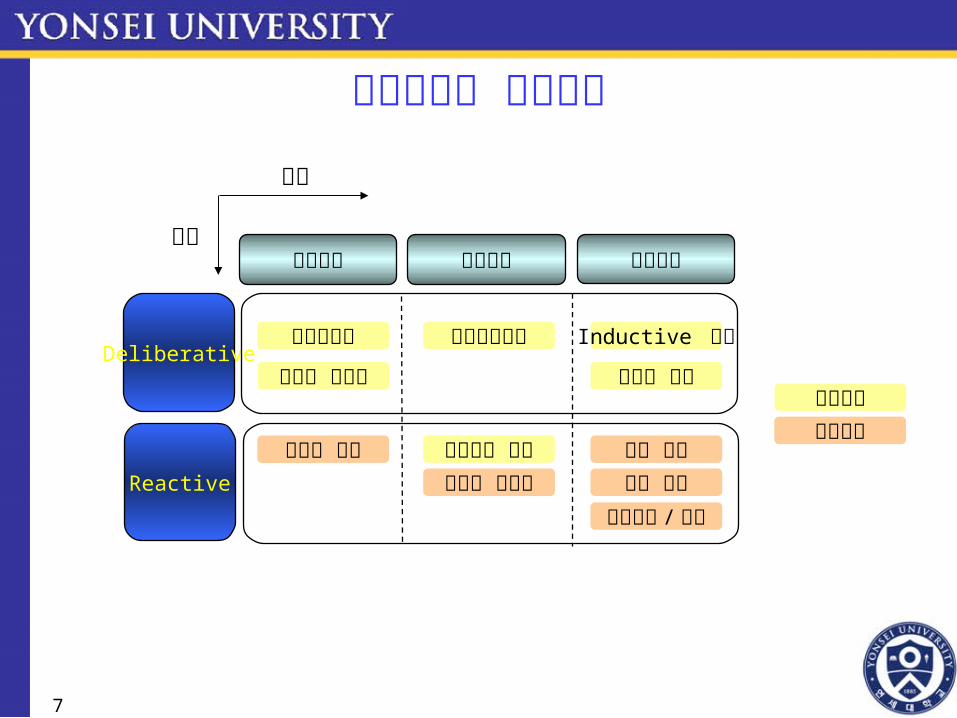
인공지능의 구현기술
Deliberative
Reactive
지식표현 추론계획 적응학습
기능
구조
자율에이전트지식베이스
행동기반 기술신경망 기술
사회성 기술
자기복제 /회복
진화 학습
Inductive 학습
소프트 컴퓨팅 모방 학습
기호중심연결중심
사용자 모델링
8
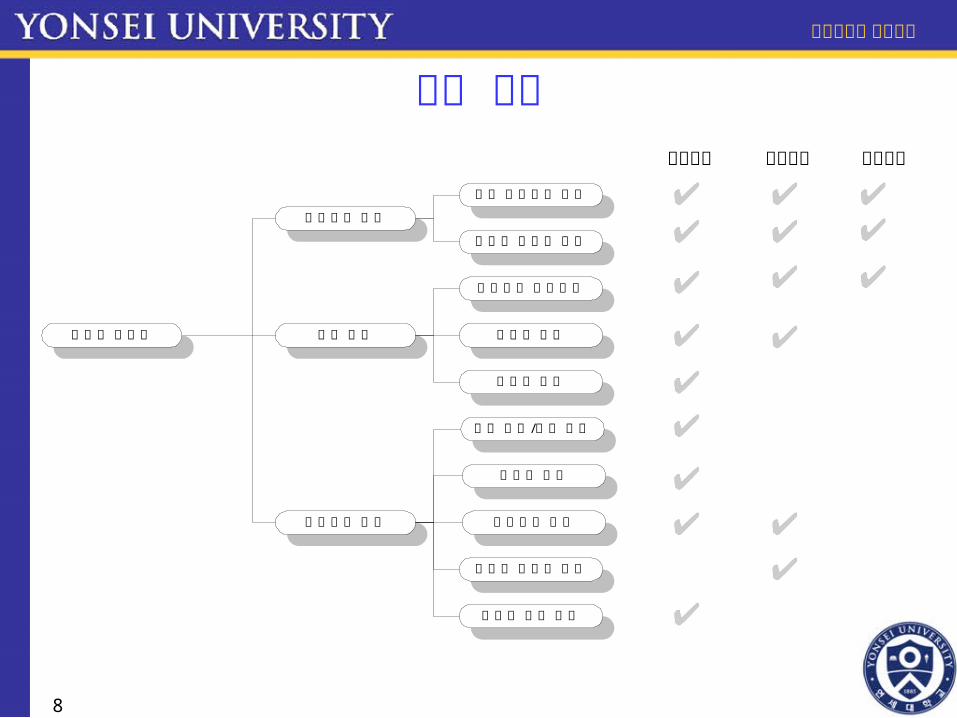
기술 트리
에이전트 기술
행동 기술
적응진화 기술
자율 에이전트 기술
인지적 로봇
모방을 통한 학습
동기유발 학습
사용자 모델링 기술
행동기반 인공지능
사회성 기술
소프트 컴퓨팅 기술
공진화 학습
/ 자기 복제 자기 회복
디지털 생명체
인공생명 인공지능 에이전트
인공지능의 구현기술
9
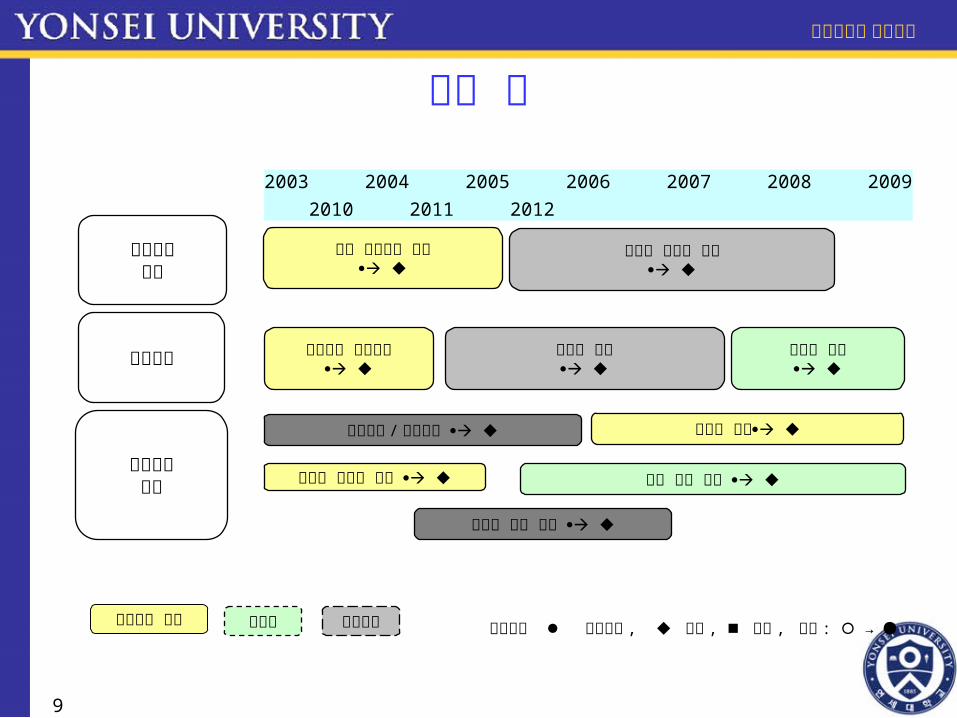
로드 맵
2003 2004 2005 2006 2007 2008 2009 2010 2011
2012
행동기반 인공지능
자율 에이전트 기술
사회성 기술
자기복제 / 자기회복
단계구분 공동연구 , 교류 , 기반 , 수준 : → 기술수준 향상 국제화 기술도입
에이전트기술
행동기술
적응진화기술 소프트 컴퓨팅 기술
사용자 모델링 기술
인지적 로봇
공진화 학습
동기 유발 학습
모방을 통한 학습
인공지능의 구현기술

10
유럽의 지능로봇 연구사례
SocialCapability
(Cooperation)
Home CareApplication
Neural Network
MuseumTour Guide
RobotAssistant
Human-LikeInteraction
SituationAwareness
EvolutionaryComputation
SymbolicModeling
기본 방법론
고차 기능
응용
Multi-AgentModeling
AgentCommunication
Language
BDIAgent
Architecture
SeamlessInteraction
(Virtual-Real)
VirtualReality
Ant-likeAgent
응용사례
11
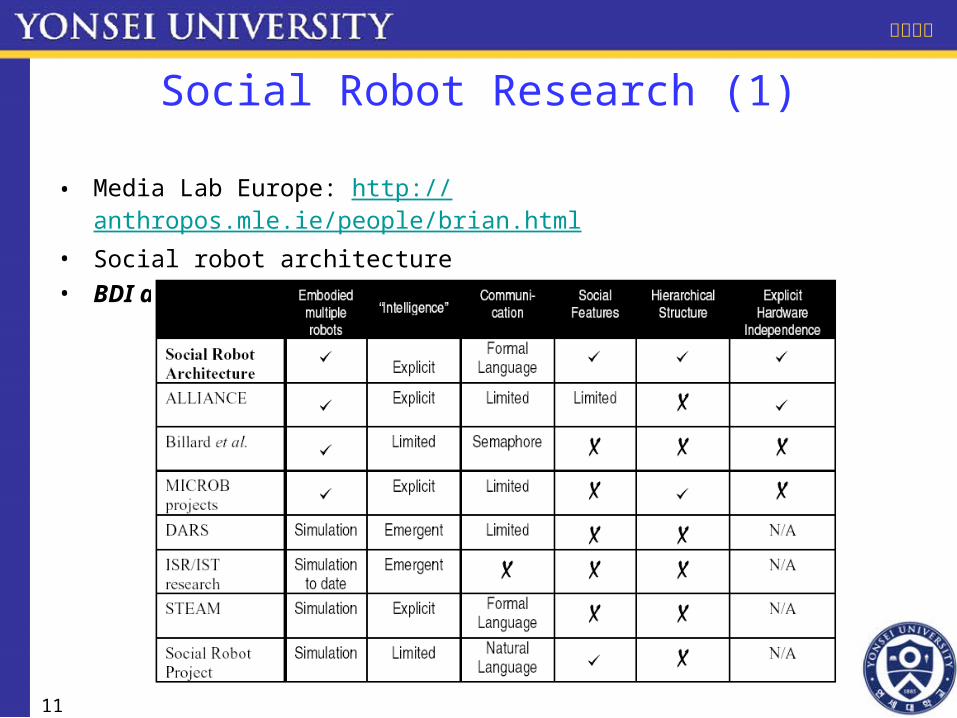
Social Robot Research (1)
• Media Lab Europe: http://anthropos.mle.ie/people/brian.html
• Social robot architecture
• BDI agent architecture
응용사례

12
Social Robot Research (2)
응용사례
13
IBL: Instruction-based Learning for Mobile Robots (1)
• http://www.tech.plym.ac.uk/soc/staff/guidbugm/ibl/index.html
• University of Plymouth, University of Edinburgh
• Aim of research: Method of knowledge acquisition and learning by intelligent systems (the acquisition of knowledge from natural language instruction)
• Focus of research
– How natural language instructions can be used by intelligent embodied agent to build a hierarchy of complex functions
응용사례
14
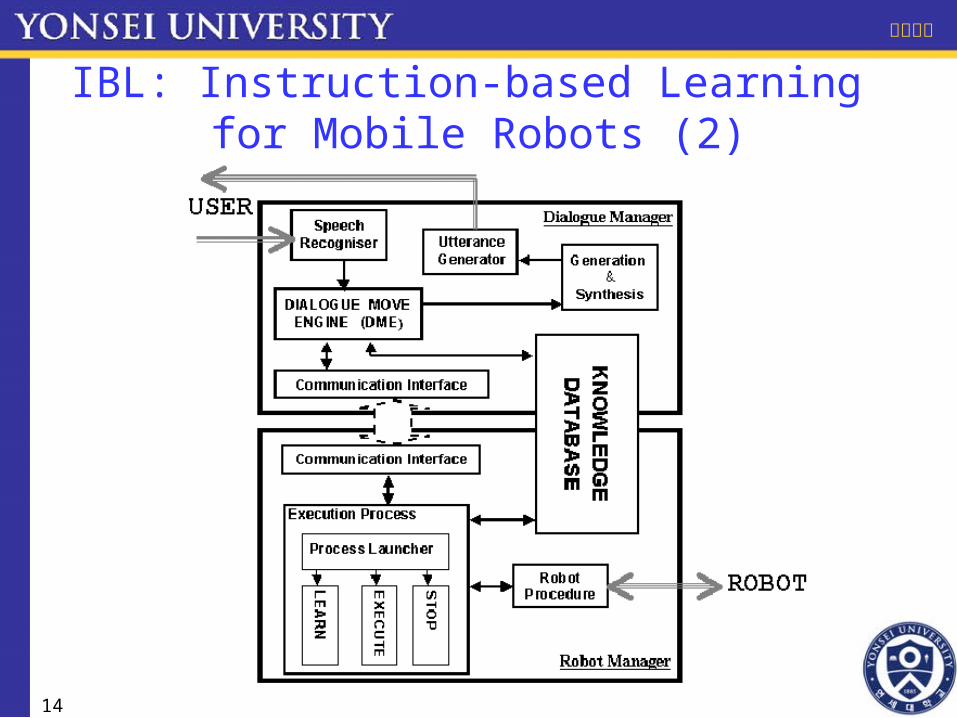
IBL: Instruction-based Learning for Mobile Robots (2)
응용사례
15
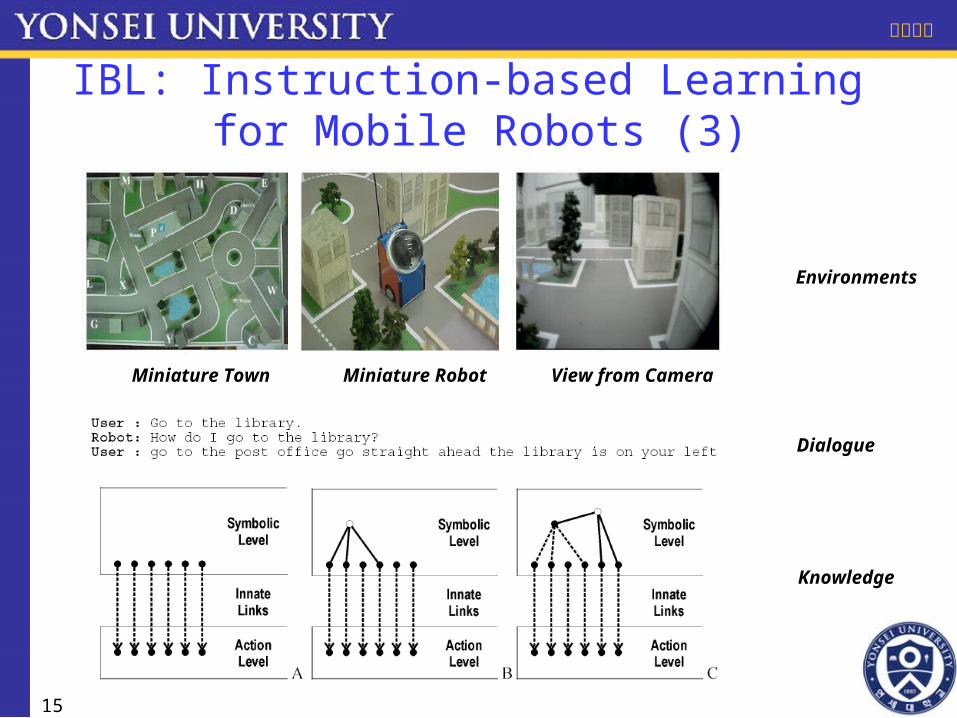
IBL: Instruction-based Learning for Mobile Robots (3)
Miniature Town Miniature Robot View from Camera
Environments
Dialogue
Knowledge
응용사례
16
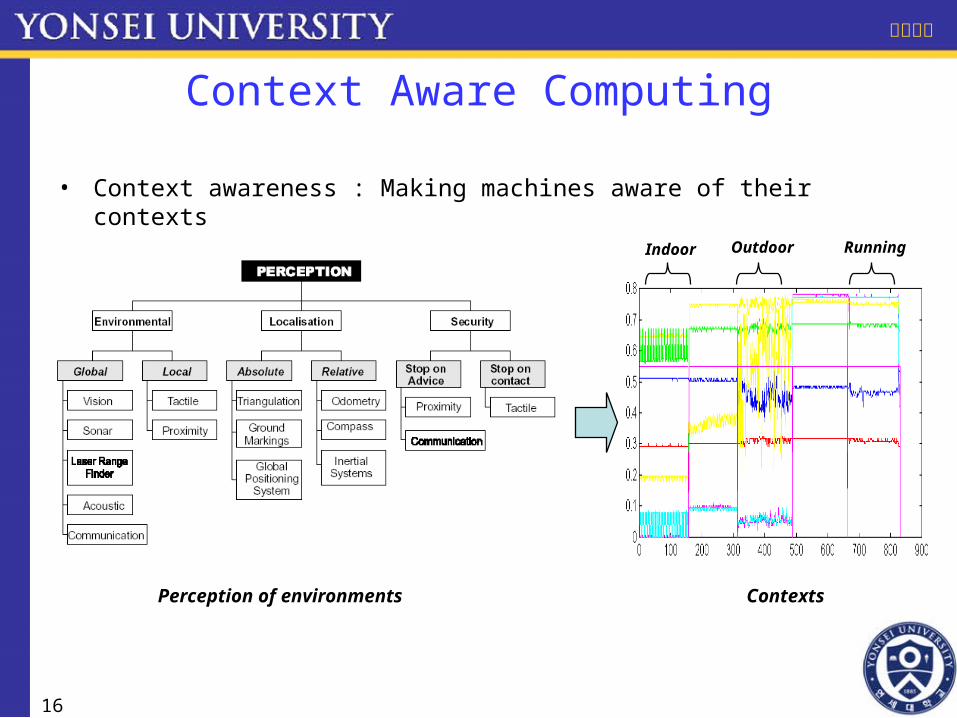
Context Aware Computing
• Context awareness : Making machines aware of their contexts
Perception of environments Contexts
Indoor Outdoor Running
응용사례
17
Minerva
• http://www-2.cs.cmu.edu/~minerva/
• CMU 의 robotic learning lab 과 독일 Bonn 대학의 컴퓨터 과학과의 협동 연구
• Bonn 대학의 세계 최초의 tour guide 로봇인 Rhino 를 바탕으로 함• 기능
– Occupancy maps
– Ceiling mosaics
– Localization
– Collision avoidance
– Path planning
– Coastal navigation
– High-level control
– Web interface
– Interaction with humans (emotion)
응용사례
18
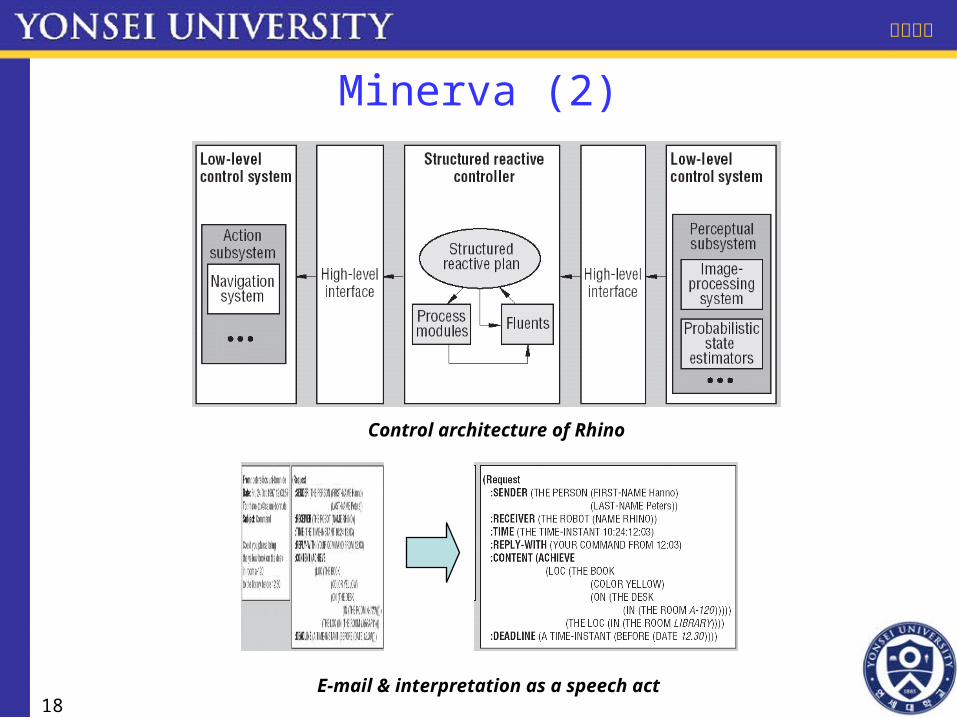
Minerva (2)
Control architecture of Rhino
E-mail & interpretation as a speech act
응용사례

19
Minerva (3)
High-level task description – Reactive planning language
응용사례
20
• http://www.morph.de
• A research initiative of the federal ministry of education and research German (Department of Education and Research in the area of Man-Machine Interaction)
• Funding period: July 1999 – June 2002
• Central idea
– To equip intelligent robot assistants with powerful and versatile mechanisms
• Communicate, interact and collaborate with human users
– In a natural and intuitive way
• Scenarios
– Manufacturing assistant
– Robot assistant for housekeeping and home care
응용사례
21
• Basic research topics
– Channels of human-machine communication
– Scene analysis and situation assessment
– Teaching, learning, and adaptation
– Motion planning and coordination, interactive task planning
– Safety, maintenance, diagnoses
응용사례

22
Agent Chameleons (1)
“If I had a world of my own, everything would be nonsense, nothing would be what it is, because everything would be what it isn't. And contrary wise, what it is wouldn't be and what it wouldn't be it would" - Lewis Carroll, Alice in Wonderland
http://chameleon.ucd.ie/ 가상 공간에서 실제 물리적인 공간에서보다 더 많은 정보를 제공 물리공간과 가상공간 사이의 경계를 불명확하게 함으로써 두 정보 공간
사이의 통합을 시도 카멜레온 에이전트를 통해 물리 환경으로부터 가상 공간으로 또는 가상
공간으로부터 물리 환경으로의 이동
응용사례
23
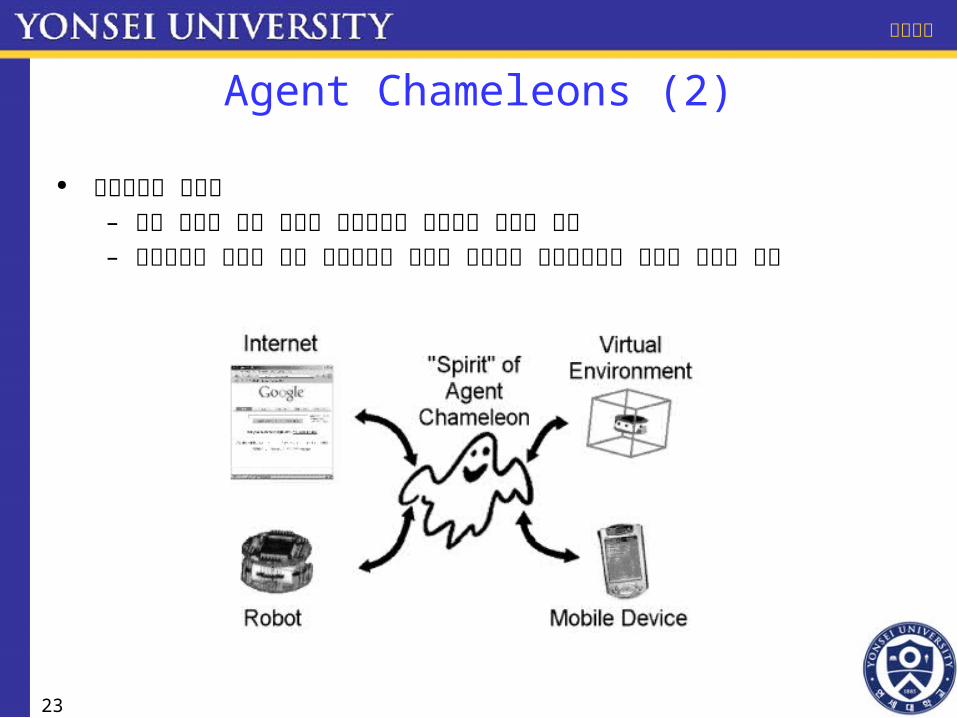
Agent Chameleons (2)
카멜레온의 모델링– 눈에 보이지 않는 친구를 현실적으로 느끼도록 하려는 개념– 에이전트의 형태에 따라 환경에서의 행동이 제한되고 종속적이므로
적절한 형태를 선택
응용사례

24
Agent Chameleons (3) 목적
– 구체적인 카멜레온 에이전트의 형태를 선택– 카멜레온이 물리환경에서 가상공간으로 또는 가상공간에서
물리환경으로의 전이를 위한 메커니즘 개발– 에이전트의 형태를 진화하고 돌연변이를 하는 과정을 연구– 공동체 개념을 검증하고 불규칙한 가상 환경에 기반한 새로운 정의를 제공
카멜레온 연구의 비전– 아바타 (avarta) 와 같은 에이전트 기술– 로보틱 아바타와 같은 인간– 인간과 같은 로봇
연구방향– 가상공간에서 실제 사람처럼 아바타를 표현하는 기술– 가상현실 headset 의 사용으로 실제공간에서 가상의 캐릭터를 볼 수
있도록 하는 기술
응용사례
25
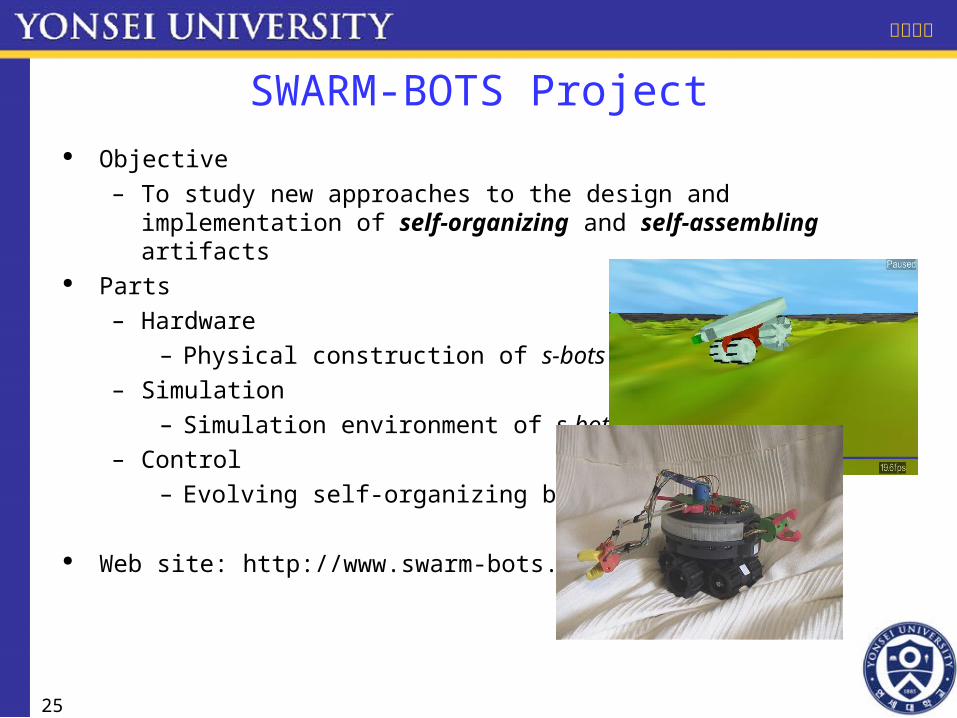
SWARM-BOTS Project Objective
– To study new approaches to the design and implementation of self-organizing and self-assembling artifacts
Parts
– Hardware
– Physical construction of s-bots
– Simulation
– Simulation environment of s-bots
– Control
– Evolving self-organizing behavior
Web site: http://www.swarm-bots.org
응용사례
26
Self-organizing Control of Swarm-bots
• Self-organization
– Interactions
• Among the system’s lower-level components
• Based on only local information
– Can be lead robust control systems
• Self-assembling
– A particular form of self-organization
– Connect one to the other creating complex physical structures
– Example
• Honey bees cluster around the queen
• Similar behaviors: birds, fish, mammals
응용사례
27
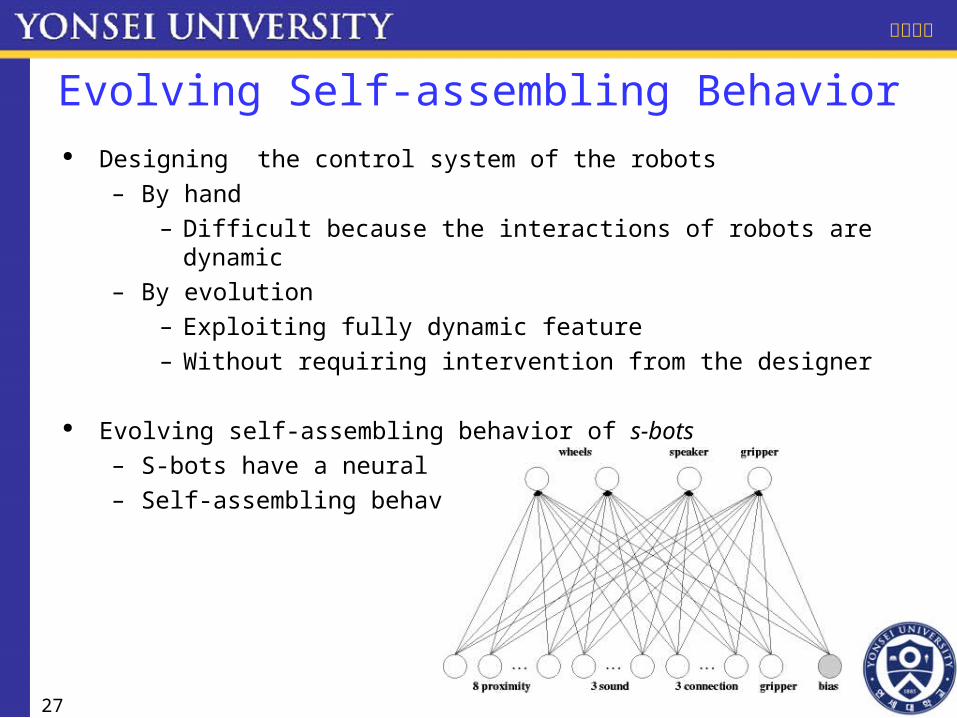
Evolving Self-assembling Behavior Designing the control system of the robots
– By hand
– Difficult because the interactions of robots are dynamic
– By evolution
– Exploiting fully dynamic feature
– Without requiring intervention from the designer
Evolving self-assembling behavior of s-bots
– S-bots have a neural network controller
– Self-assembling behavior
응용사례
28
현재 인공지능 기술의 문제점
• 상향식 접근 방법 ( 인공생명 ) 과 하향식 접근 방법 ( 전통적인 인공지능 ) 이 독자적으로 연구 개발되고 있음
• 전통적인 인공지능 방법이 추구하는 상위 수준의 지능과 행동기반 지능이 추구하는 저 수준의 지능 사이에 협력이 필요– 전통적인 인공지능 : 유연성이 부족하고 많은 시간을 소요함– 행동기반 인공지능 : 복잡한 문제를 해결하기에는 어려움이 따름
• 기호 수준의 표현과 연결주의 표현 사이의 협력 필요
• 사회성 , 감정 , 감성 등에 대한 연구 필요
29
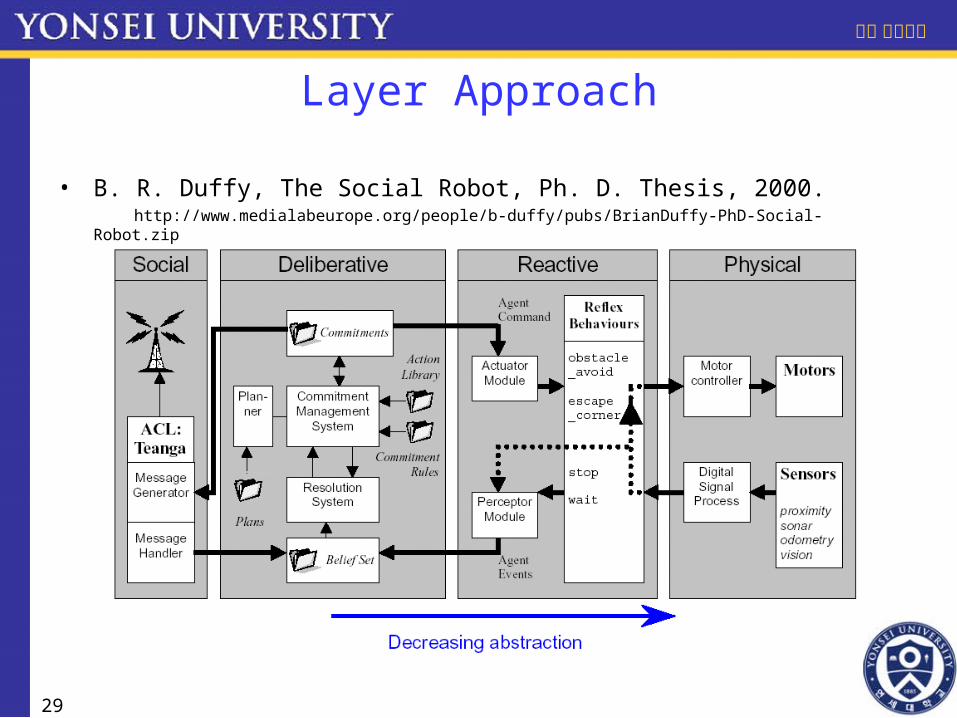
Layer Approach
• B. R. Duffy, The Social Robot, Ph. D. Thesis, 2000. http://www.medialabeurope.org/people/b-duffy/pubs/BrianDuffy-PhD-Social-Robot.zip
향후 발전방향
30
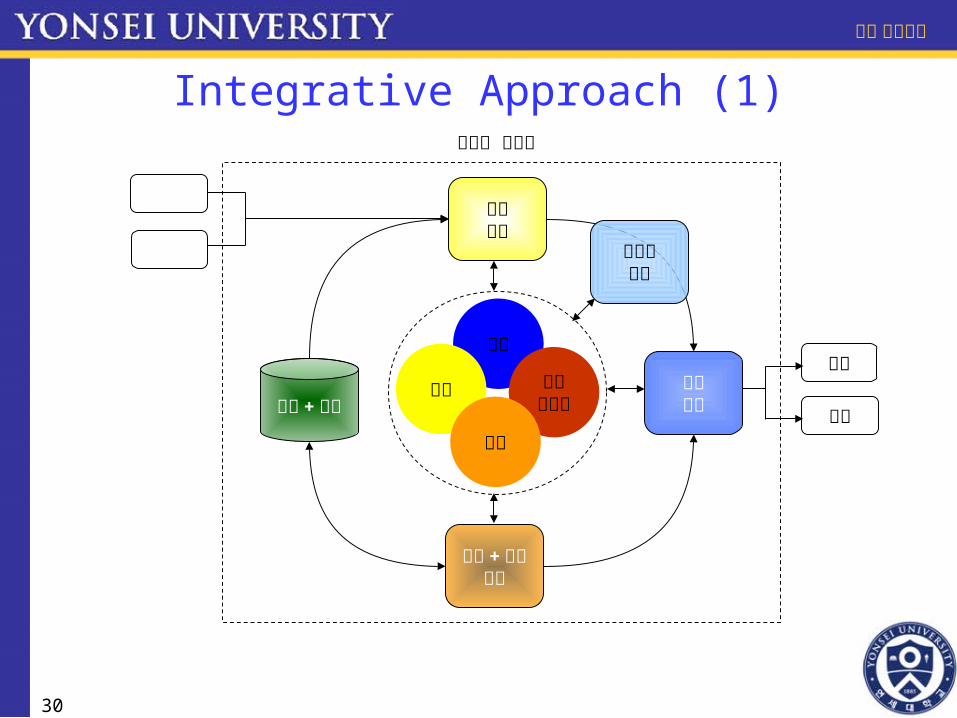
Integrative Approach (1)
청각
시각
디지털 생명체
대화처리
추론
감성모델링
학습 행동진화
지식 + 감성습득
지식 + 감성 행동
음성
진화
플랫폼이동
향후 발전방향
31
Integrative Approach (2)
• 대화 처리 : 자연어를 이용하여 자연스러운 상호작용이 이루어지도록 함
• 지식 + 감성 DB : 도메인의 ontology, 사용자로부터 들어오는 새로운 지식 , 다양한 감성에 대한 지식 , 문제 해결을 위한 지식
• 지식 + 감성 습득 : 사전에 모든 지식과 감성 정보를 정형화하고 저장할 수 없기 때문에 새로운 정보를 확인하고 저장하는 기능
• 행동진화 : 새로운 행동은 기본적인 행동들의 조합을 통해 생성 , 기본행동은 환경과의 상호작용과 진화원리 적용을 통해 새로운 형태로 발전
• 플랫폼 이동 : 사용자의 요구와 환경의 상태를 바탕으로 문제에 맞게 적절히 플랫폼을 이동하며 자신의 형태를 변형
향후 발전방향

32
Integrative Approach (3)
추론
감성모델링
학습
진화
- 사용자의 기분 상태 파악- Context awareness- System reconfiguration- 맞춤형 서비스
- 캐릭터의 모양 진화- 캐릭터의 행동 진화- 추천 상품의 진화 설계- 추론 /학습 모델의 진화적 설계
- 상위 수준의 정보 추론- 센서 정보의 통합- 행동생성을 위한 유연한 추론- 높은 정확도의 인식을 위한 추론
- 대화 패턴 학습- 새로운 지식 학습- Ontology 학습- 사용자의 취향 학습
향후 발전방향
33
정리• 지능형 로봇의 기술 동향
– Agent 기술이 연구의 중심이 되고 있음 (Media Lab Europe, Minerva)– 자연어 처리와 사회성 등 자연스러운 인터페이스 구축에 초점 (IBL,
Minerva)– 인간과 유사한 상위 수준의 기능을 구현하기 위해 자연으로부터
아이디어를 가져옴 (Swarm-bots)– 단순히 작업만을 잘 수행하는 기능위주의 로봇에서 벗어나 인간과
상호작용하고 인간과 유사한 행동을 보이는 로봇을 개발– 에이전트의 감정 표현 , 사람이 매우 밀집한 환경에서 활동 , 복잡한
작업의 분할을 이용한 해결 , 사회적인 기능의 구현– 기본적인 기능을 사람의 적은 노력으로 구현하기 위해 진화 알고리즘을
사용– 핵심기술 : BDI agent, emotional agent, natural language processing, ant-
like algorithm, mobile agent, evolutionary computation• 향후 발전방향
– 독립적으로 개발되고 있는 지능 요소들을 통합하기 위한 생물학적 /공학적 통합형 접근 필요
– 대화 인터페이스를 통한 지식 습득과 추론 , 학습 , 계획 기능과 행동생성 기능을 결합한 상위 수준의 지능 시스템 필요