kinematika, konsep dasar
TRANSCRIPT

7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 1/11
Kinematika
Konsep Dasar
1
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 2/11
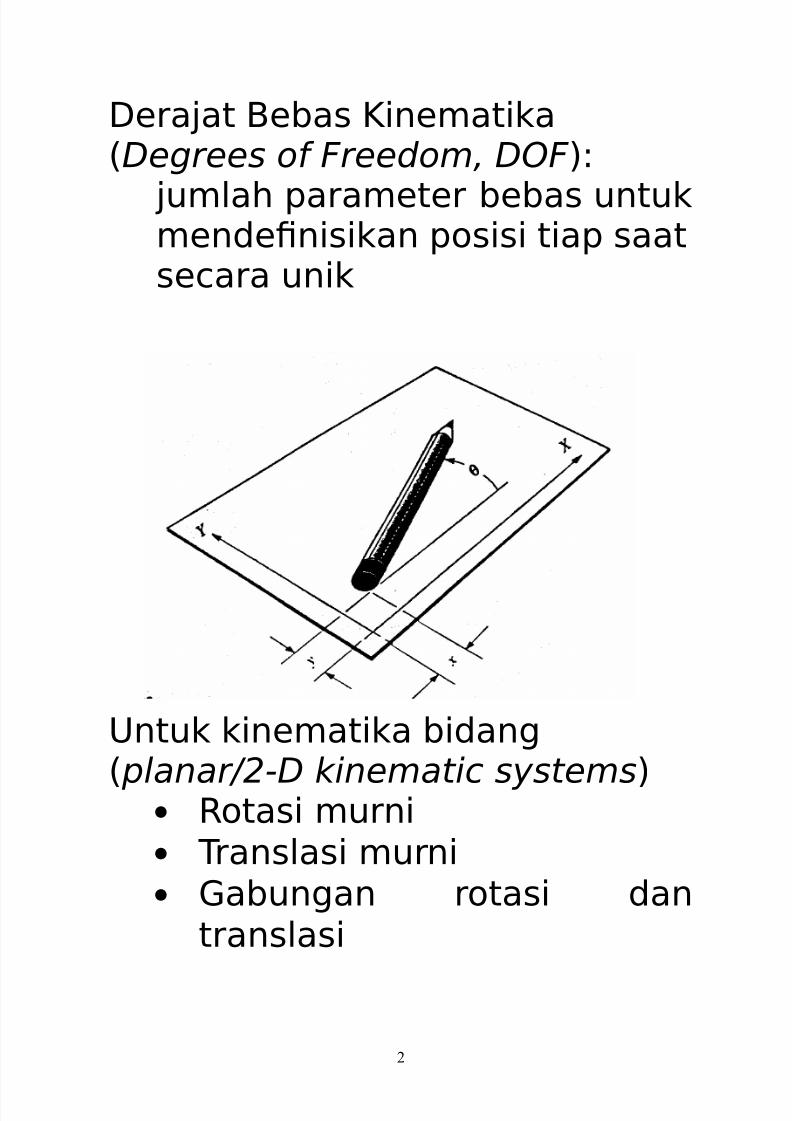
Derajat Bebas Kinematika(Degrees of Freedom, DOF ):
jumlah parameter bebas untukmendefnisikan posisi tiap saatsecara unik
Untuk kinematika bidang
( planar/2-D kinematic systems)• Rotasi murni• Translasi murni• Gabungan rotasi dan
translasi
2
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 3/11
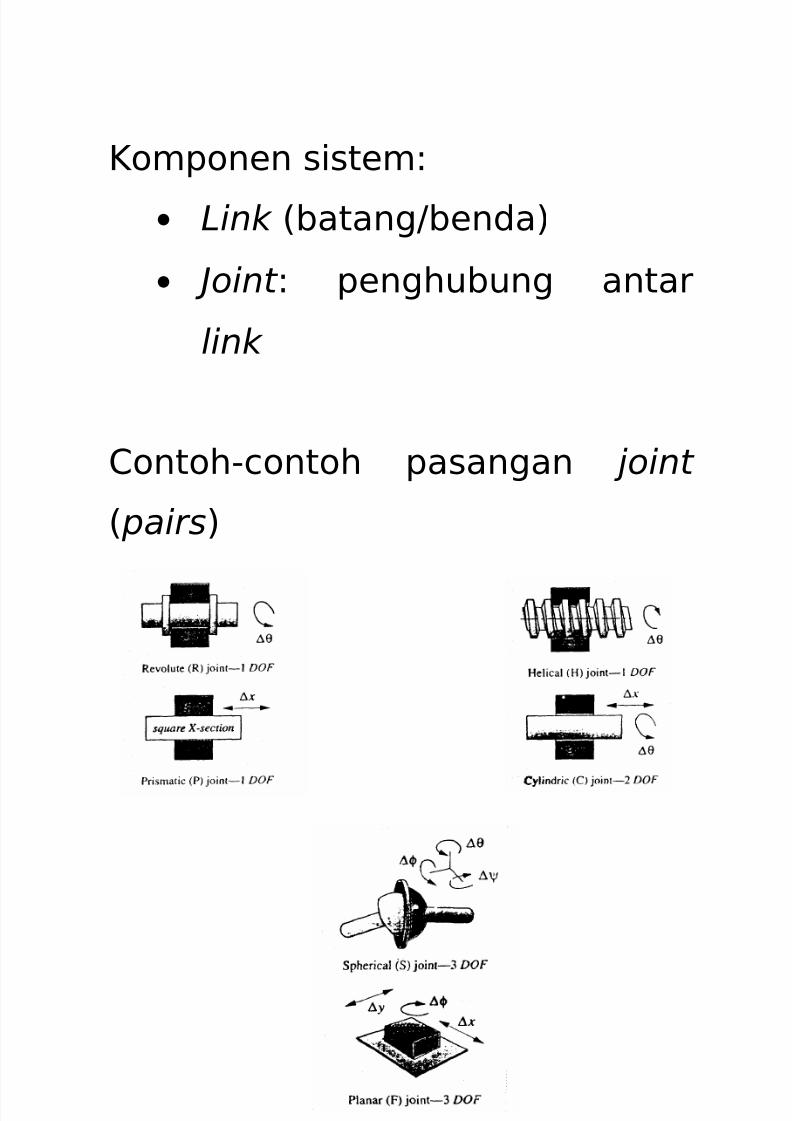
Komponen sistem:
• Link (batangbenda)
• Joint : penghubung antar
link
!ontoh"contoh pasangan joint
( pairs)
3
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 4/11
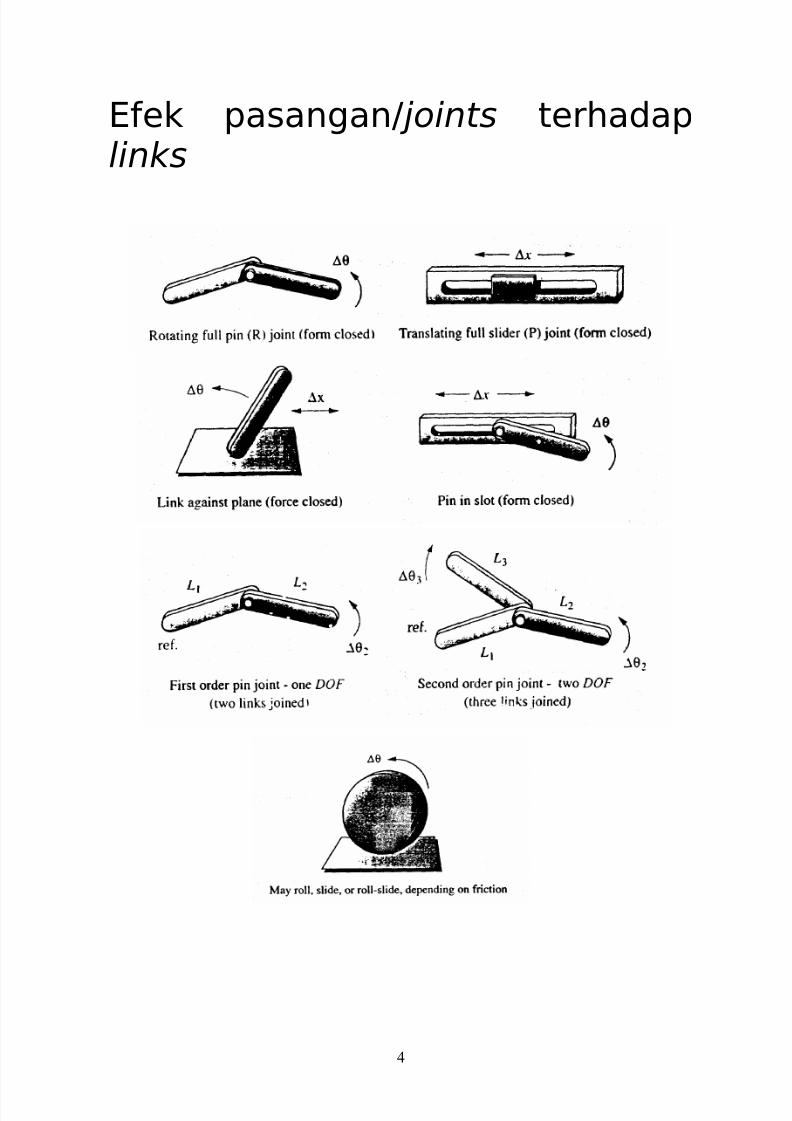
#$ek pasangan joints terhadaplinks
4
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 5/11
Defnisi:
• Rantai kinematika: kumpulan links dan joints
• %ekanisme: rantai kinematika& minimal satu link
dibumikan (diground)'• %esin (machine): Kumpulan mekanisme ang
dapat menghasilkan gaakerja (Reuleau)
• Crank : link ang dapat berputar *+,, dan dikait ke
bumi
• ocker : link ang hana bergerak bolak"balik dan
dikait ke bumi• Coupler : batang penghubung& link ang
gerakanna kompleks dan tak dikait ke bumi
5
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 6/11
• !round: link ang tak bisa bergerak
DOF & defnisi lain: jumlah masukan untuk
menghasilkan keluaran tertentu
%obilitas (mo"ility ): jumlah D-. untuk /D&
% 0 *(1 2 3) 2 /43 2 4/
(5ers' Kut6bach& pengembangan dari pers' Gruebler)'
Untuk *D (spatial mechanism):
% 0 +(1"3) 2 743 2 84/ 2 *4* 2 /48 247
6

7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 7/11
!ontoh"!ontoh
7
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 8/11
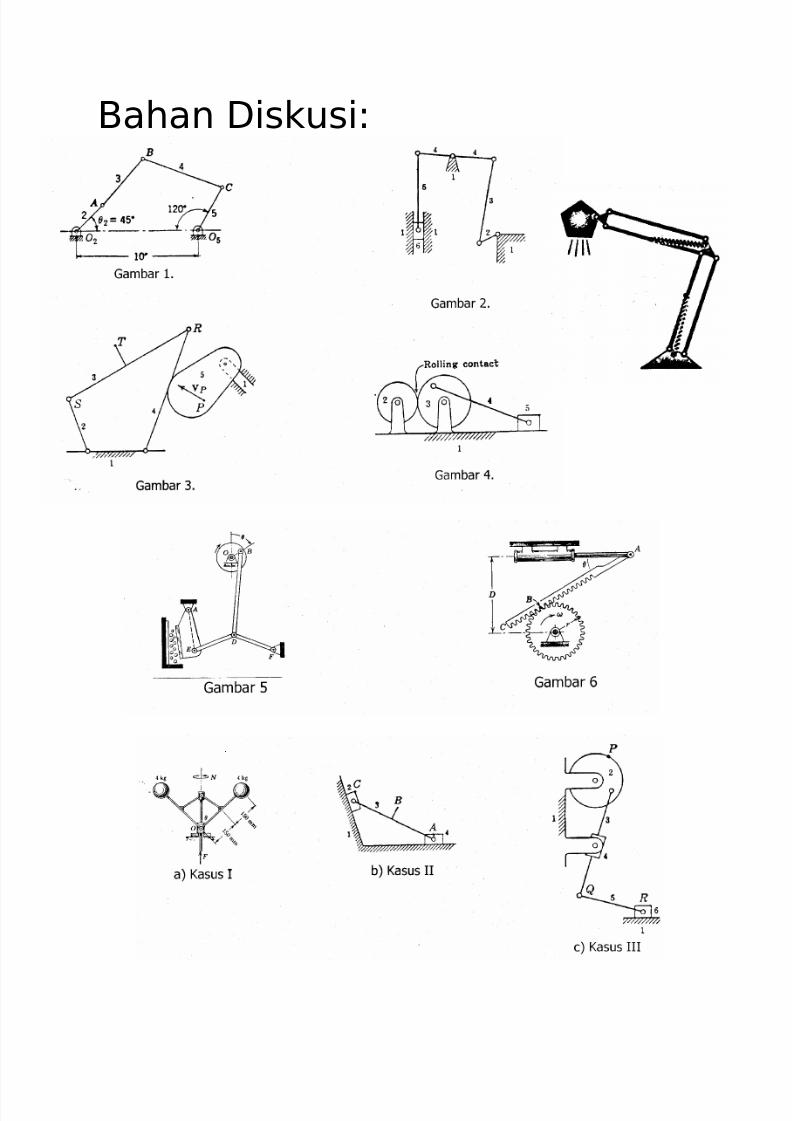
Bahan Diskusi:
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 9/11
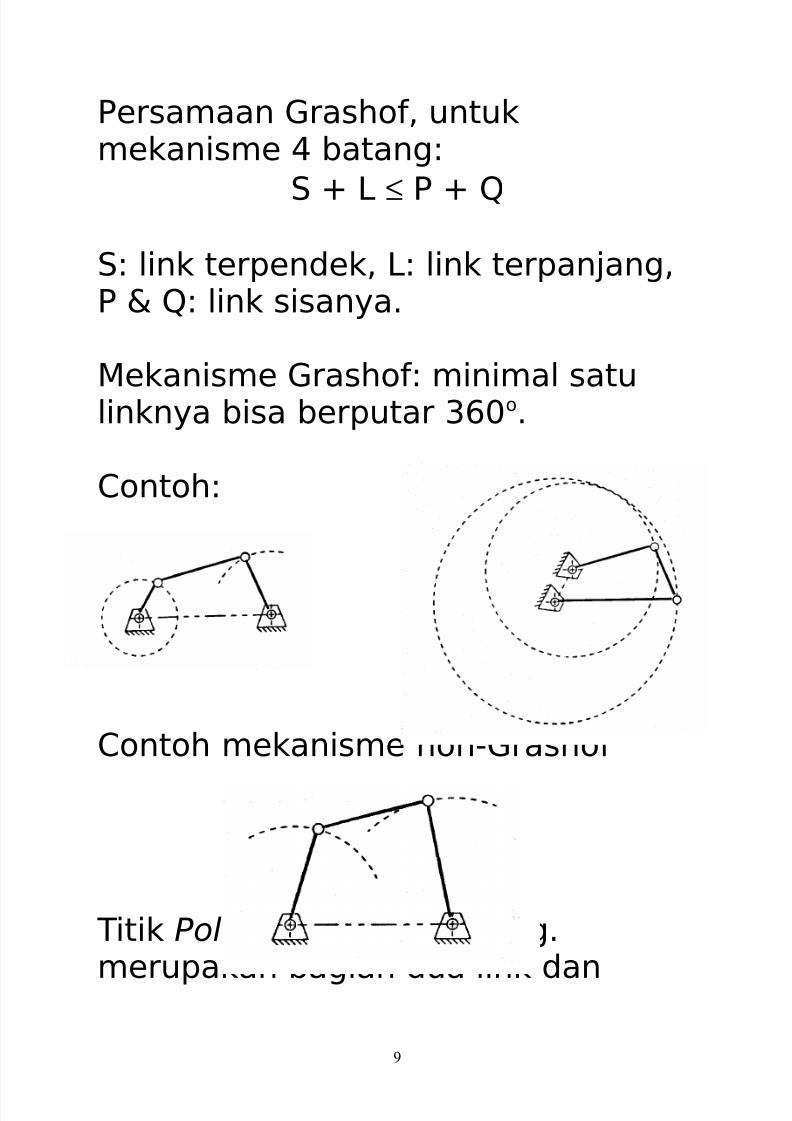
5ersamaan Grasho$& untukmekanisme 8 batang:
9 1 ≤ 5 ;
9: link terpendek& 1: link terpanjang&5 < ;: link sisana'
%ekanisme Grasho$: minimal satulinkna bisa berputar *+,o'
!ontoh:
!ontoh mekanisme non"Grasho$
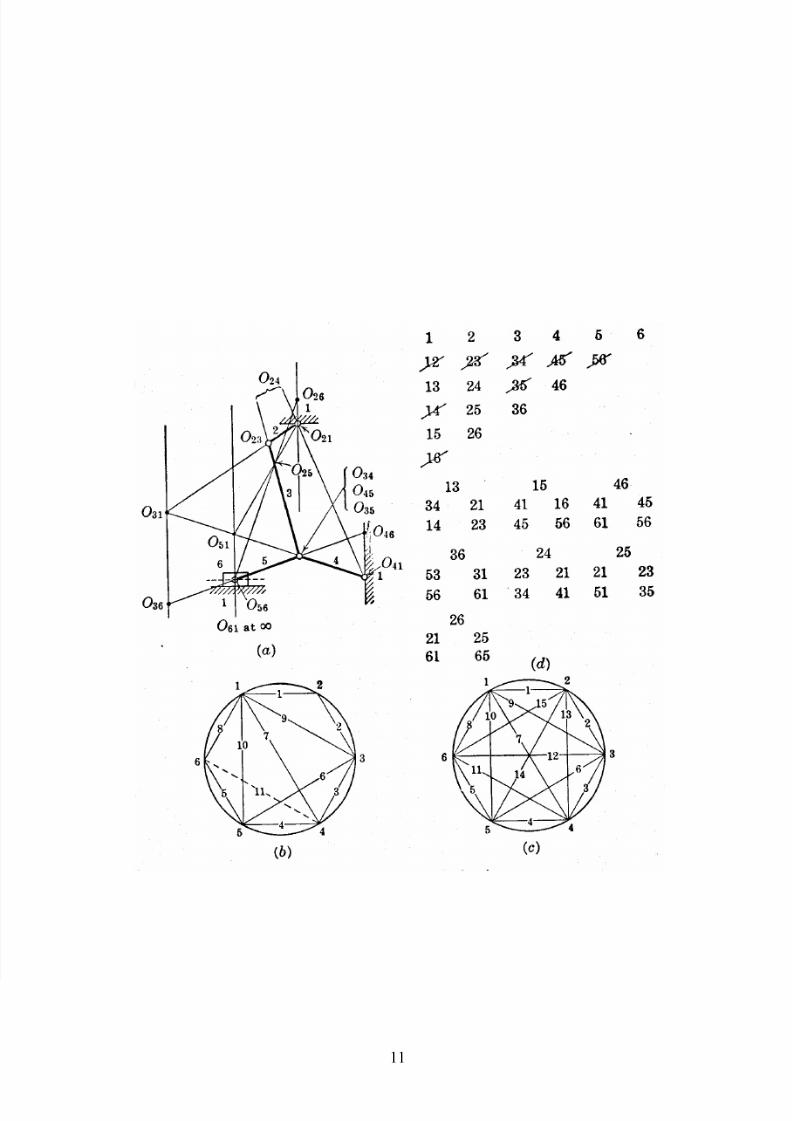
Titik #ole Kecepatan: titik g'
merupakan bagian dua link dan
9
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 10/11
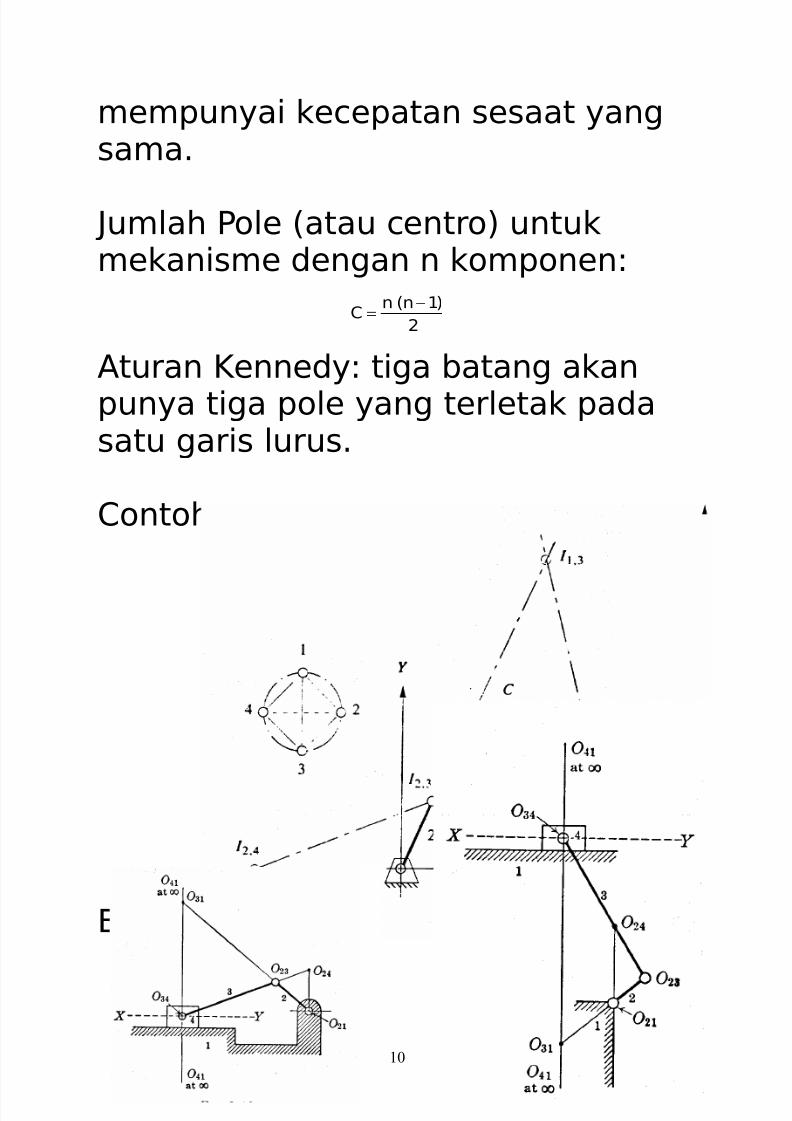
mempunai kecepatan sesaat angsama'
4umlah 5ole (atau centro) untukmekanisme dengan n komponen:
/
)3n(n!
−
=
=turan Kenned: tiga batang akan
puna tiga pole ang terletak padasatu garis lurus'
!ontoh:
Bahan Diskusi:
10
7/23/2019 Kinematika, Konsep Dasar
http://slidepdf.com/reader/full/kinematika-konsep-dasar 11/11
11