kurzvorstellung des kompetenzfelds regelungstechnik · 6/4/2014 1 kurzvorstellung des...
TRANSCRIPT
6/4/2014
1
Kurzvorstellung des Kompetenzfelds
Prof. Dr.-Ing. Frank Allgöwer
Regelungstechnik
Studiengang Medizintechnik
Frank AllgöwerInstitut für Systemtheorie und Regelungstechnik
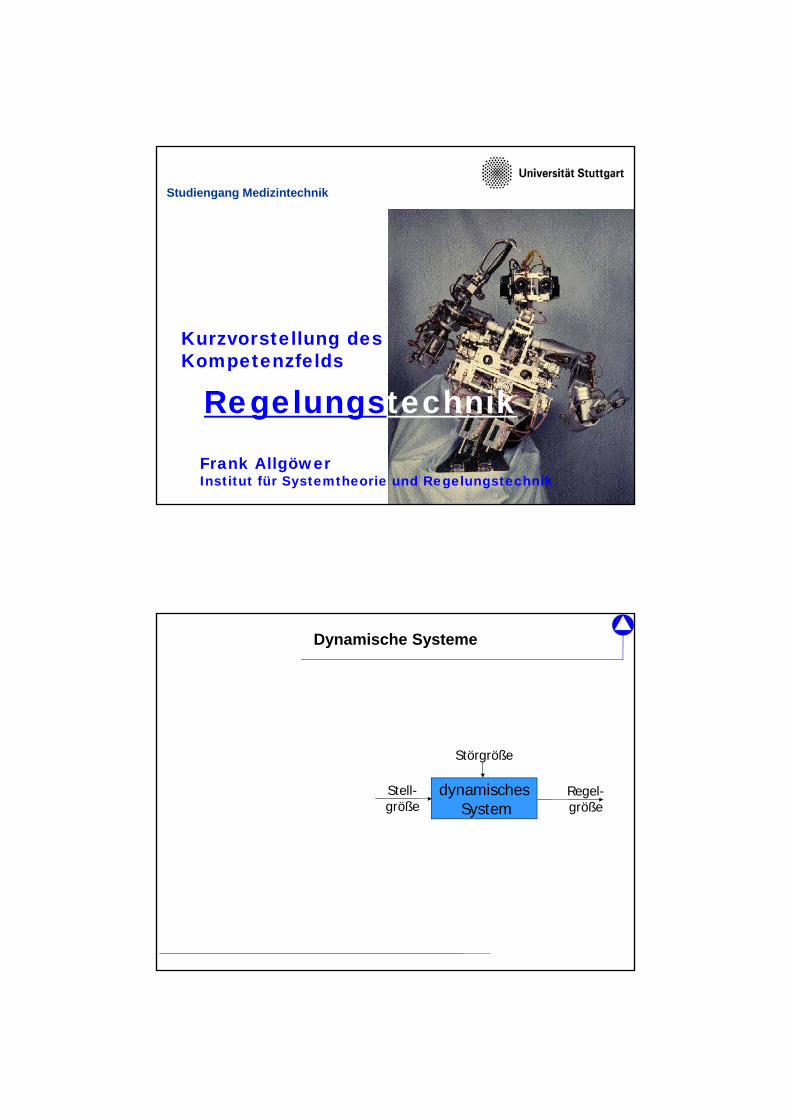
dynamischesSystem
Stell-größe
Regel-größe
Störgröße
Dynamische Systeme
6/4/2014
2
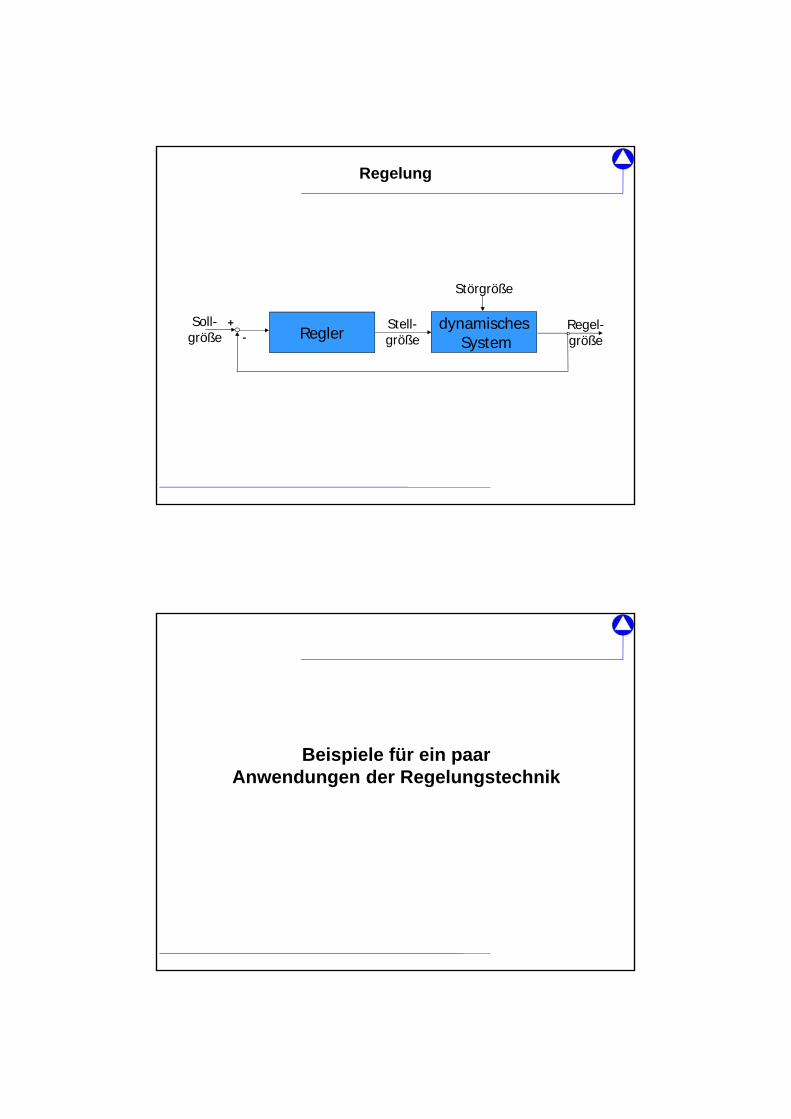
dynamischesSystem
Stell-größe
Regel-größe
Störgröße
Regler-+Soll-
größe
Regelung
Beispiele für ein paarAnwendungen der Regelungstechnik
6/4/2014
3
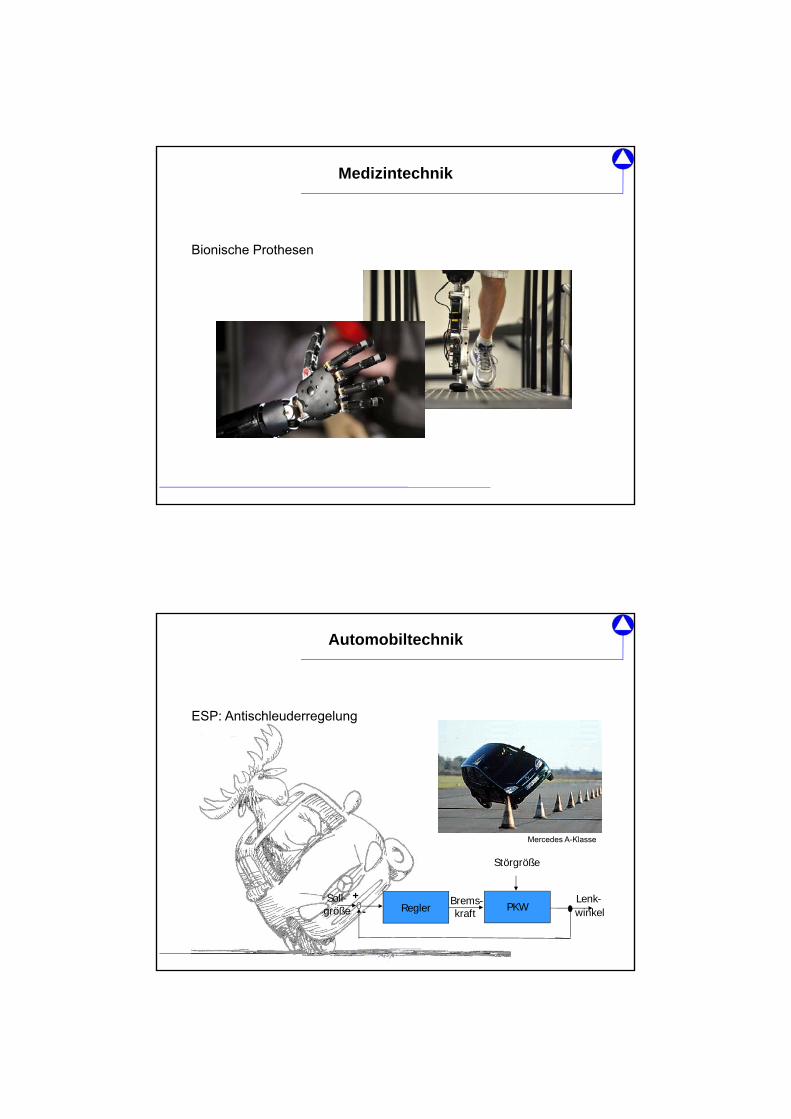
Medizintechnik
Bionische Prothesen
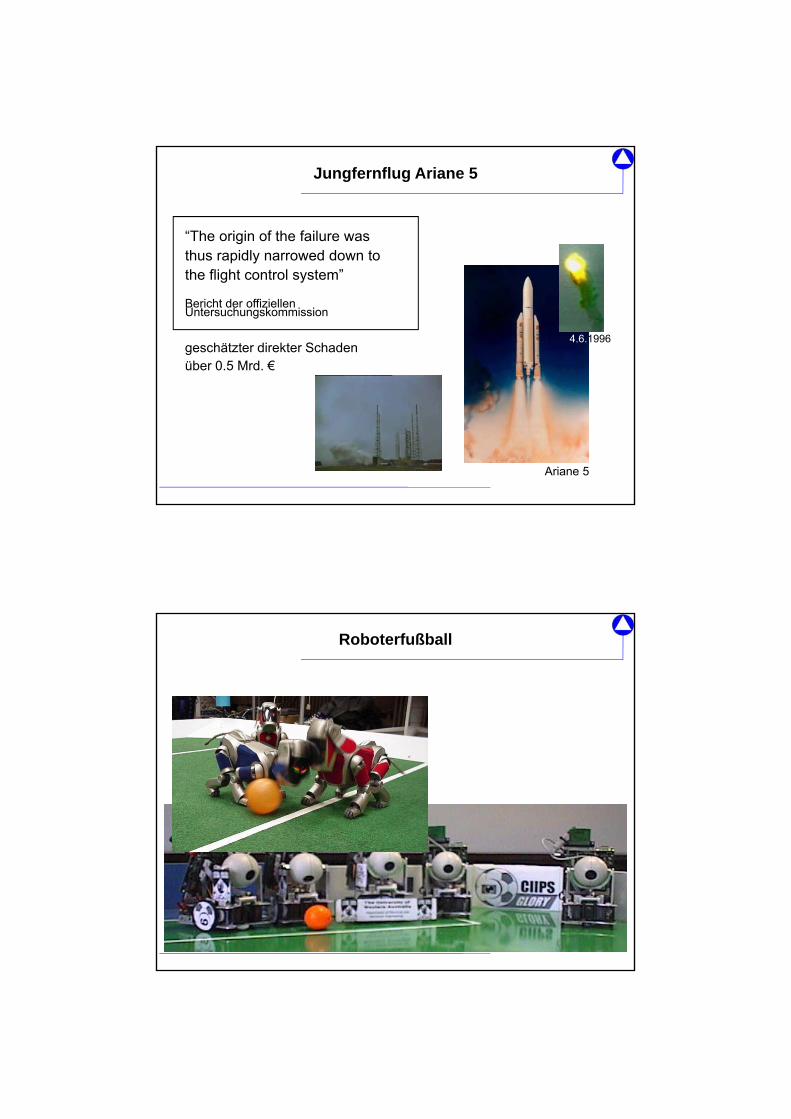
Automobiltechnik
ESP: Antischleuderregelung
PKWBrems-kraft
Lenk-winkel
Störgröße
Regler-
+Soll-größe
Mercedes A-Klasse
6/4/2014
4
Jungfernflug Ariane 5
“The origin of the failure was thus rapidly narrowed down tothe flight control system”
Bericht der offiziellen Untersuchungskommission
geschätzter direkter Schadenüber 0.5 Mrd. €
Ariane 5
4.6.1996
Roboterfußball
6/4/2014
5
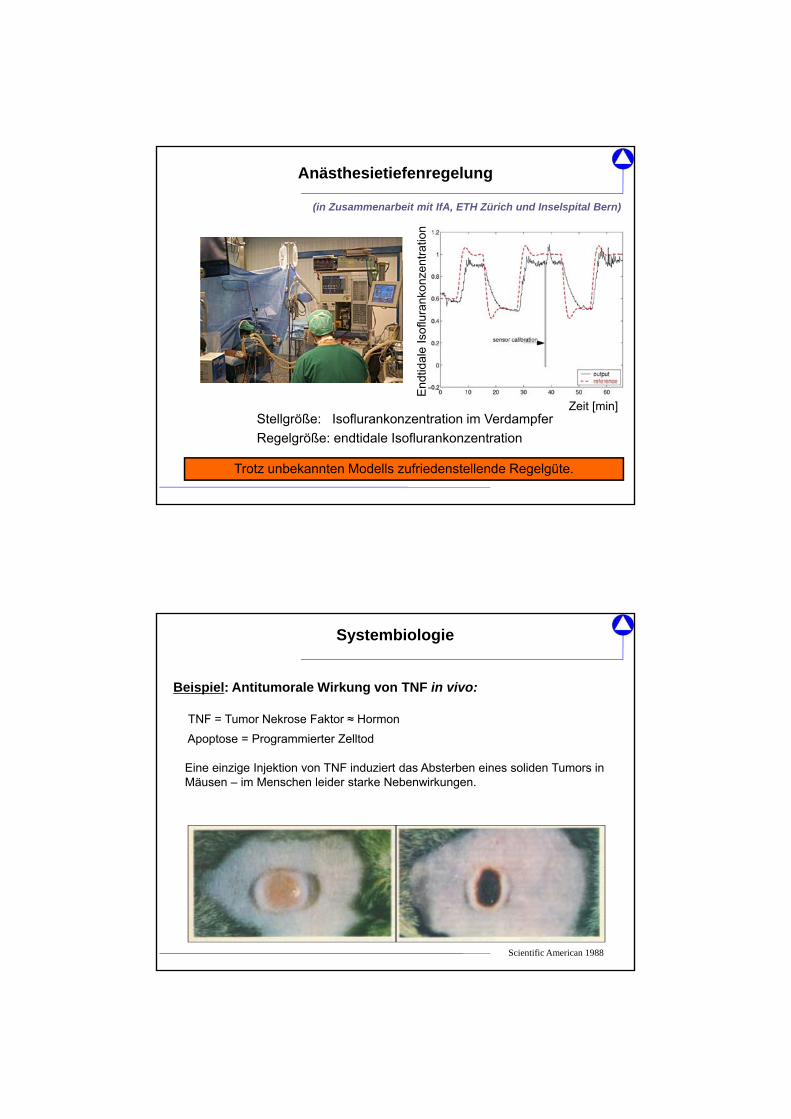
Anästhesietiefenregelung
(in Zusammenarbeit mit IfA, ETH Zürich und Inselspital Bern)
Stellgröße: Isoflurankonzentration im Verdampfer
Regelgröße: endtidale Isoflurankonzentration
Zeit [min]E
ndtid
ale
Isof
lura
nkon
zent
ratio
n
Trotz unbekannten Modells zufriedenstellende Regelgüte.
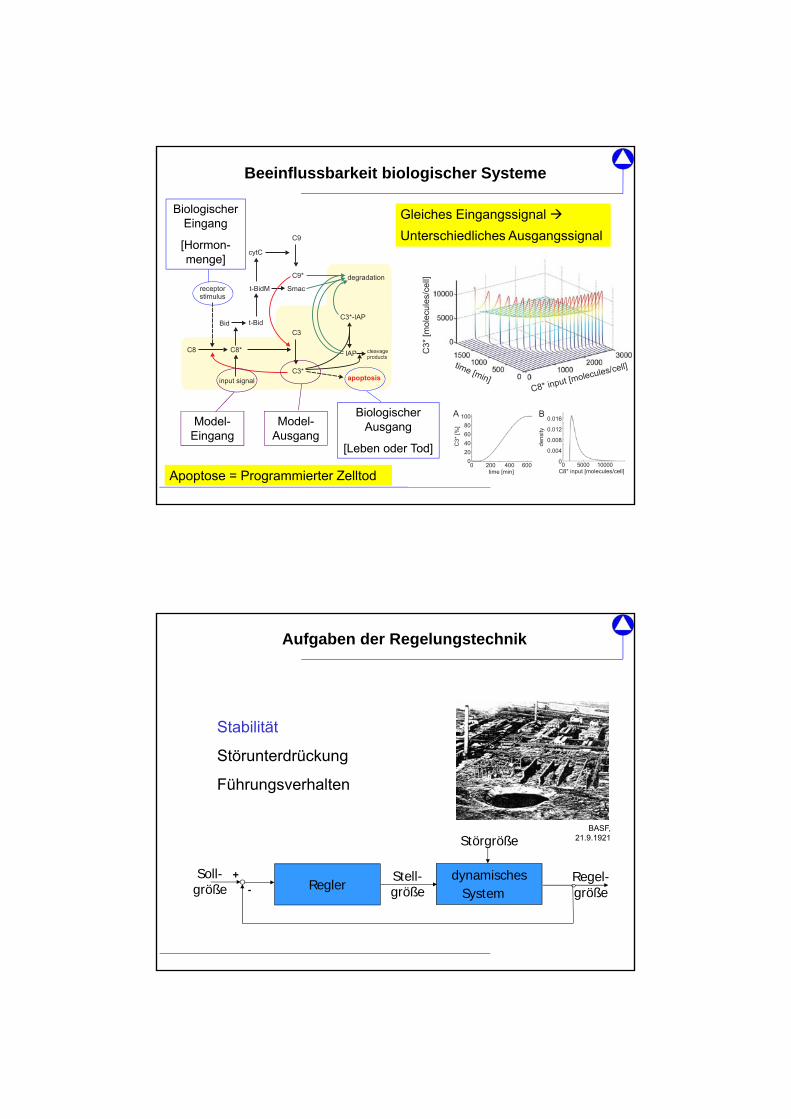
Beispiel: Antitumorale Wirkung von TNF in vivo:
Scientific American 1988
TNF = Tumor Nekrose Faktor ≈ Hormon
Apoptose = Programmierter Zelltod
Eine einzige Injektion von TNF induziert das Absterben eines soliden Tumors in Mäusen – im Menschen leider starke Nebenwirkungen.
Systembiologie
6/4/2014
6
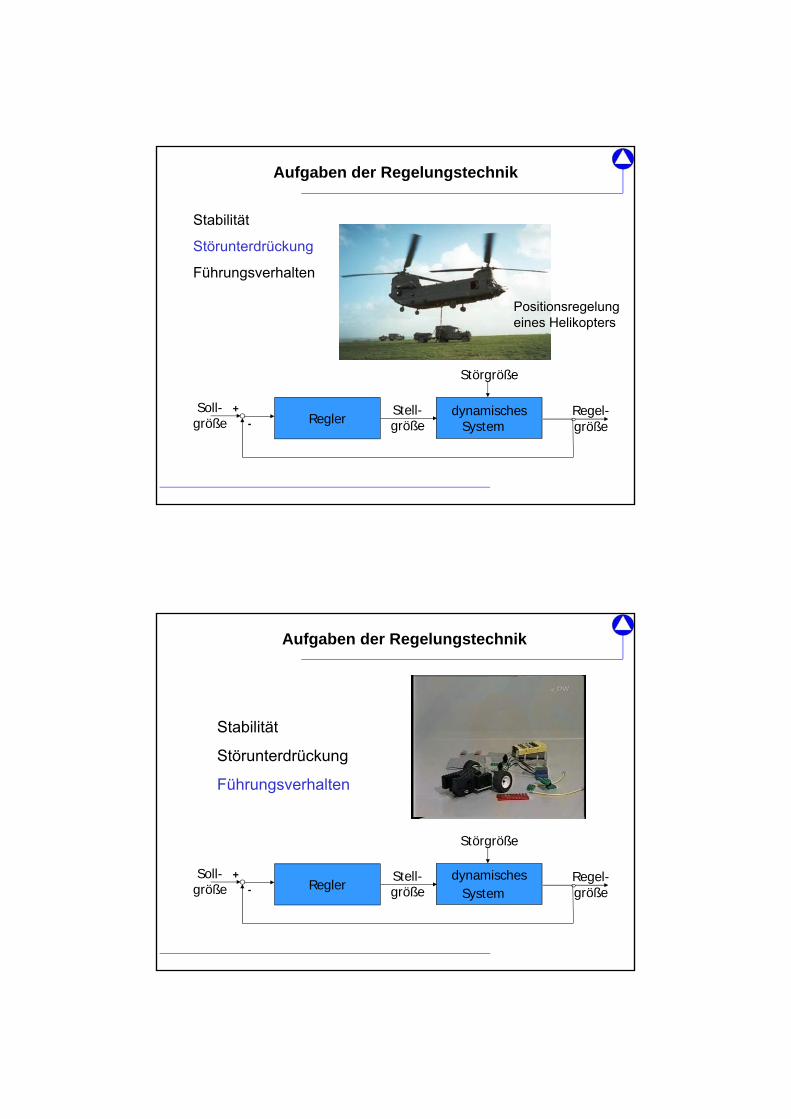
Beeinflussbarkeit biologischer Systeme
Biologischer Eingang
[Hormon-menge]
Model-Eingang
Biologischer Ausgang
[Leben oder Tod]
Model-Ausgang
Apoptose = Programmierter Zelltod
Gleiches Eingangssignal
Unterschiedliches Ausgangssignal
Aufgaben der Regelungstechnik
Stabilität
Störunterdrückung
Führungsverhalten
dynamischesSystem
Stell-größe
Regel-größe
Störgröße
Regler-
+Soll-größe
BASF, 21.9.1921
6/4/2014
7
Aufgaben der Regelungstechnik
Stabilität
Störunterdrückung
Führungsverhalten
dynamischesSystem
Stell-größe
Regel-größe
Störgröße
Regler-
+Soll-größe
Positionsregelungeines Helikopters
Aufgaben der Regelungstechnik
Stabilität
Störunterdrückung
Führungsverhalten
dynamischesSystem
Stell-größe
Regel-größe
Störgröße
Regler-
+Soll-größe
6/4/2014
8
Regelungstechnik
Wichtiges Gebiet mit hoher Anwendungsrelevanz in vielen Bereichen (Medizintechnik, Maschinenbau, Elektrotechnik, …)
Regelungstechnik
Wichtiges Gebiet mit hoher Anwendungsrelevanz in vielen Bereichen (Medizintechnik, Maschinenbau, Elektrotechnik, …)
Theoretisch anspruchsvolles Gebiet, das Brücke zwischen Mathematik und Anwendungen schlägt.

6/4/2014
9
Aufbau des Kompetenzfelds
reales System
),(
),(
uxhy
uxfx
mathematisches Modell
Modellierung
)(xku
Regler
Reglerentwurf
z.B. Technische MechanikExperimentalphysik
• Systemdyn. Grundl. d. RT (SGRT)• Einf. in d. Regelungstechnik (ERT)• Mehrgrößenregelung (MGR)
• Roborace ;-)• Praktikum ERT
Schwerpunkt des Kompetenzfelds liegt auf systemtheoretischer Analyse und Reglerentwurf
Implementierung
geregeltes System
Kompetenzfeld Regelungstechnik im BSc. Medizintechnik
3. Semester 4. Semester 5. Semester 6. Semester
Einführung in die Regelungstechnik
4.5 LP 1.5 LP
Projektarbeit Tech. Kyb.„Roborace“
3 LP
Mehrgrößenregelung
3 LP
6/4/2014
10
Modul Einführung in die Regelungstechnik (6 LP)
5. Semester 6. Semester
Praktikum
4-5 Nachmittage
Projektwettbewerb
selbstständige Gruppenarbeit
Vorlesung
2 SWS
Gruppenübungen
2 SWS
Kompetenzfeld Regelungstechnik im BSc. Medizintechnik
3. Semester 4. Semester 5. Semester 6. Semester
Einführung in die Regelungstechnik
4.5 LP 1.5 LPProjektarbeit Tech. Kyb.„Roborace“
3LP
Mehrgrößenregelung
3LP
• Grundlegende und vertiefende Methoden der Regelungstechnik
• Praktische Anwendung der erlernten Methoden in den Praktika
• Anwendung der gelernten Mathematik in Hinblick auf regelungstechnische Anwendung
6/4/2014
11
Ausblick: Spezialisierungsfach Regelungstechnik im MSc. Medizintechnik
1. Semester 2. Semester 3. Semester
Konzepte der Regelungstechnik 6 LP
Projektarbeit Regelungstechnik
1.5 LP 1.5 LP
Robust Control
6 LP
Convex Optimization
6 LP
Statistical Learning Methods and Stochastic Control 6 LP
Nonlinear Control
6 LP
Optimal Control
6 LP
Introduction to Adaptive Control 3 LP
Kernfächer
(Pflicht)
Ergänzungsfächer
(Wahlmöglichkeit)
Praktische Übungen
Angewandte Regelung und Optimierung in
der Prozessindustrie 3 LP
Projektarbeit Technische Kybernetik im 5. Semester

6/4/2014
12
Viel Erfolg für Ihr Medizintechnik - Studium
… wünscht das ISTwww.ist.uni-stuttgart.de