lecc 3 - construcción de un drone
TRANSCRIPT

Capítulo 3
Diseño y construcción del prototipo
En la actualidad existen diversos softwares que pueden ser utilizados para eldiseño de aeronaves a escala; pero antes de emplear algún software para realizaresto, es necesario hacer un estimado de la masa total que va a soportar el vehículo,incluyendo la estructura del mismo y la velocidad deseada de vuelo; para que deacuerdo a estas especificaciones, iniciar el diseño del perfil aerodinámico y fuselajedel prototipo.
3.1. Prototipos experimentales
A lo largo de este proyecto se realizaron dos prototipos diferentes. El Etkni-an que tenía el sistema de propulsión en la parte forntal lo que ocasionaba que serompiera la hélice y en ocasiones el motor, sobre todo cuando no se realizaba unaterrizaje cuidadoso. Por lo anterior, se diseño otro vehículo que protegiera al sis-tema de propulsión para evitar reparaciones continuas y pérdidas materiales. A éstese le denominó RafKinga. Otro aspecto importante que se mejoró en el segundoprototipo fue la robustez del ala, un mayor levantamiento generado por la mismay la disminución del peso total del vehículo. El perfil aerodinámico empleado enambos prototipos fue el NACA 6412.
El prototipo llamado Etknian tiene una masa aproximada de 975g incluyendo elvehículo y todos los componentes necesarios para efectuar vuelos de forma autóno-ma y el prototipo llamado RafKinga tiene una masa aproximada de 950g con lasmismas especificaciones que el anterior. La diferencia de masas entre estos vehículosradica en la configuración del cuerpo y la longitud del ala empleada; pero el materialcon el cual fueron construidos es el mismo en ambos prototipos, aunque en diferentesproporciones.
La velocidad de vuelo deseada para ambos vehículos se encuentra entre los 7m/sy 8m/s, que es la velocidad comunmente empleada en los aviones de aeromodelismo.
21

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
El cuerpo de los prototipos fue realizado con un material llamado dépron el cualestá compuesto por espuma de poliestireno comprimido de aproximadamente 6mmde grosor; este material es empleado en aeromodelismo ya que es muy liviano, es fácilde manipular y a su vez tiene la rigidez necesaria para hacer el cuerpo del vehículoy soportar impactos menores.
En lo que respecta al ala de los vehículos está fabricada de poliestireno expandido,mejor conocido como unicel. Se eligío el unicel para construirla debido a la longitud ygrosor de la misma, añadiendo que el unicel es un material muy liviano y resistentehasta cierto punto, por lo que se necesita reforzar el ala para evitar constantesreparaciones. El ala de los vehículos tiene una configuración rectangular pero condiferentes dimensiones para cada uno los prototipos.
3.2. Diseño del perfil aerodinámico, ala y fuselaje
del prototipo
Para diseñar el perfil aerodinámico y así posteriormente construir el ala, se utili-zarón diversas ecuaciones para calcular los parámetros aerodinamicos presentes enla dinámica de los vehículos aéreos como son el levantamiento L, superficie alar S,etc. La ecuación del levantamiento (lift) L es la siguiente.
L = ClqS = W (3.1)
donde Cl es el coeficiente adimensional de levantamiento, mientras q es la presióndinámica dada por
q = [1
2ρV 2] (3.2)
donde ρ es la densidad del aire y V es la velocidad del vehículo. Considerandoque nos encontramos en la Ciudad de México a una altitud de 2250m sobre el niveldel mar a una presión atmosférica de 585mmHg; por lo tanto, la densidad del airees de 1,2210kg/m3 de acuerdo a la ISA (International Standard Atmosphere) y Srepresenta la superficie del ala dada por
S = c l (3.3)
donde l es la longuitud del ala y c es la cuerda del perfil aerodinámico dado por
c =W
qCl
(3.4)
22

3. Diseño y construcción del prototipo
Emplando las ecuaciones anteriores se diseña el perfil aerodinámico usando lossoftwares JavaFoil (figura3.1) y Xfoil (figura3.2), respectivamente.
Figura 3.1: Perfil aerodinámico creado con el software JavaFoil
Figura 3.2: Perfil aerodinámico creado con el software Xfoil
3.2.1. Prototipo Etknian
El prototipo que se va a describir a continuación fue realizado con la ayuda delsoftware Xfoil, el cual se empleó para el diseño del ala y cuerpo del UAV de acuerdoa las necesidades: que el UAV realice vuelos a una velocidad aproximada de 7,5m/sy que el vehículo sea capaz de soportar un peso de 1kg.
Otra ventaja se tiene al emplear el software de diseño es que éste nos proporcionadatos como el valor del Cl, los cuales dependen del perfil aerodinámico empleado,del ángulo de ataque α y del número de Reynolds (Re), éste es un número adimen-sional utilizado en mecánica de fluidos para conocer el movimiento de un fluido. Enaeronáutica se considera flujo laminar a un fluido con Re ≤ 500000, etc.
23

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
3.2.1.1. Características y elementos del prototipo Etknian
El prototipo tiene una masa de 715g que engloba la estructura del avión, cuatroservomotores, tubos de fibra de carbono de un diámetro de 5mm y 3mm para darrigedez al cuerpo y ala; el receptor, el motor, la base de soporte para el motor ypor último la hélice. A estos 715g se le debe adicionar la parte electrónica para larealización de vuelos automáticos y la batería para la alimentación del motor y loscircuitos electrónicos; cuya masa es de 260g; dando así la masa total del prototipode aproximadamente 975g.
La masa individual de los elementos que conforman al vehículo son los siguientes:
Elemento MasaAla 355gFuselaje 130gMotor Brushless 65gServomotor 11gVariador de Velocidad 30gTarjetas Electrónicas 145gReceptor 9gBatería 115gBase del Motor 10gHélice 7gCables y conectores 20gExtras 45gTolal 975g
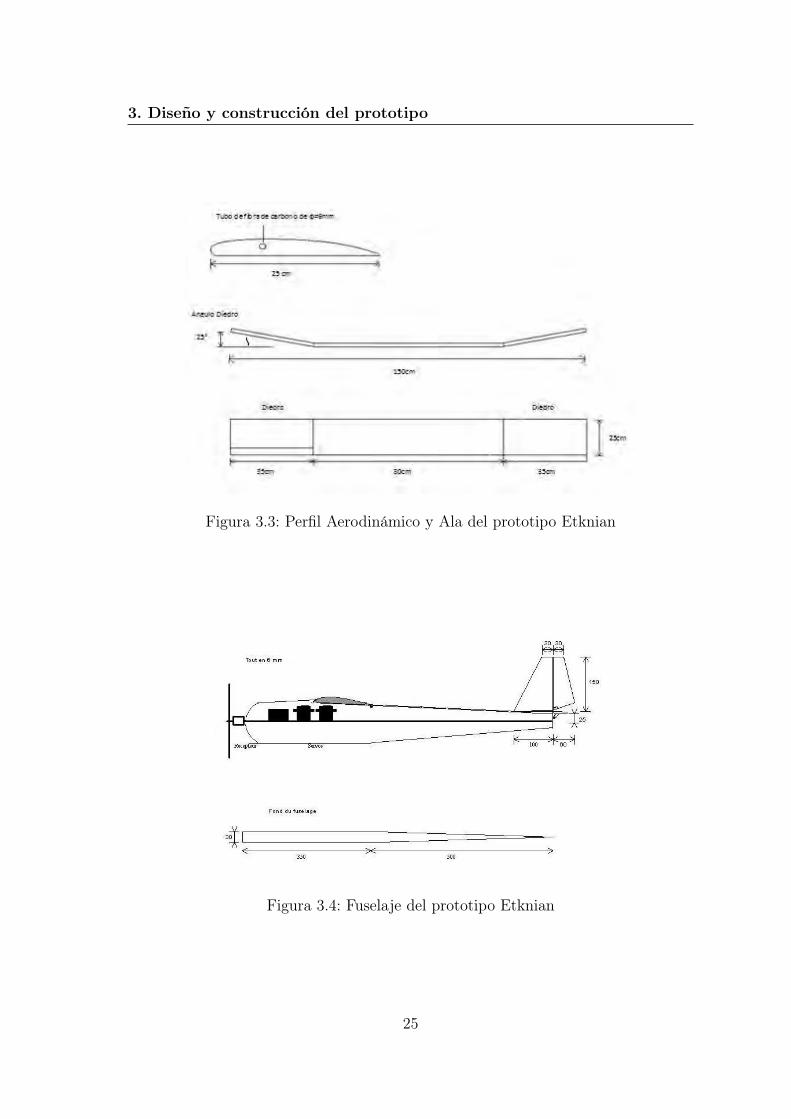
Por otro lado el prototipo cuenta con una embergadura de 1,5m dividida en tressecciones (figura 3.3). La primera sección corresponde a una superficie rectangular de80cm de largo por una cuerda de 25cm de ancho por 2,5cm de alto. Las dos seccionesrestantes corresponden a dos superficies rectangulares llamadas diedros, donde lasdimensiones de cada uno de ellos es de 35cm de largo por una cuerda de 25cm deancho y 2,5cm de alto; estas superficies se colocan en cada uno de los extremos del alacon una inclinación de 25 grados respecto a la horizontal, esta inclinación tambiénes conocida como ángulo diedro. Los diedros sirven para aumentar la estabilidad delavión.
El fuselaje o cuerpo del UAV (figura 3.4) tiene una longitud de 85cm de largopor 10cm de ancho en la parte frontal y va disminuyendo hasta llegar a los 5cm en laparte trasera; a vez, a esté lo conforman el estabilizador horizontal y el estabilizadorvertical, cada uno de ellos con su respectivo servomotor.
24
3. Diseño y construcción del prototipo
Figura 3.3: Perfil Aerodinámico y Ala del prototipo Etknian
Figura 3.4: Fuselaje del prototipo Etknian
25

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
3.2.1.2. Parámetros aerodinámicos del prototipo Etknian
El perfil aerodinámico empleado fue el NACA 6412 diseñado en el softwareJavaFoil (figura 3.1) y también fue realizado en el software Xfoil (figura 3.2).Dondelos parámetros aerodinámicos reales del ala son los siguientes:
Variable ValorPerfil NACA 6412Cuerda (C) 0.25mEmbergadura (b) 1.50mEspesor (Tck) 12.83 %Camber (Cmb) 6.61 %
Gracias a los parámetros propuestos y a los obtenidos mediante el software sepueden calcular las ecuaciones anteriores. Donde el coeficiente de lift Cl = 0,76, ladensidad del aire ρ = 1,2210kg/m3 de acuerdo a la ISA (International StandardAtmosphere), la cuerda c = 0,25m, la velocidad V = 7,5m/s, la longitud del alal = 1,5m y el ángulo de ataque α = 5. Por lo tanto:
De la ecuación 3.2 obtenemos la Presión dinámica q y de la ecuación 3.3 laSuperficie alar S.
q = (1
2)(1,2210kg/m3)(7,5m/s2)
q = 34,3406Pa (3.5)
S = (0,25m)(1,5m)
S = 0,3750m2 (3.6)
A su vez, de la ecuación 3.1 calculamos el Levantamiento (Lift) L y por últimode la ecuación 3.4 se calcula el valor de la Cuerda c.
L = (0,76)(34,3406Pa)(0,3750m)
L = 9,9986N (3.7)
26

3. Diseño y construcción del prototipo
c =9,9986N
(34,3406Pa)(0,76)
c = 0,25m (3.8)
Una forma de comprobar que el ala del UAV es capaz de soportar la masadel vehículo es emplear La Segunda Ley de Newton que dice que la fuerza F esdirectamente proporcional a la masa m por la aceleración a y está representada enla siguiente ecuación
F = ma (3.9)
Empleando el resultado de la ecuación 3.7 y el valor de la aceleración gravi-tacional a = 9,8m/s2, despejamos la masa m de la ecuación 3.9 dandonos comoresultado la masa del UAV
m =F
a(3.10)
m =9,9986N
9,8m/s2
m = 1,02kg ≈ 1kg (3.11)
De esta forma se puede apreciar que el Levantamiento (Lift) generado por el alaes el necesario para soportar la masa del avión que es de 975g, teniendo la posibili-dad de agregar más componentes con una masa menor a 25g, y aun así el UAV serácapaz de realizar vuelos sin dificultades.
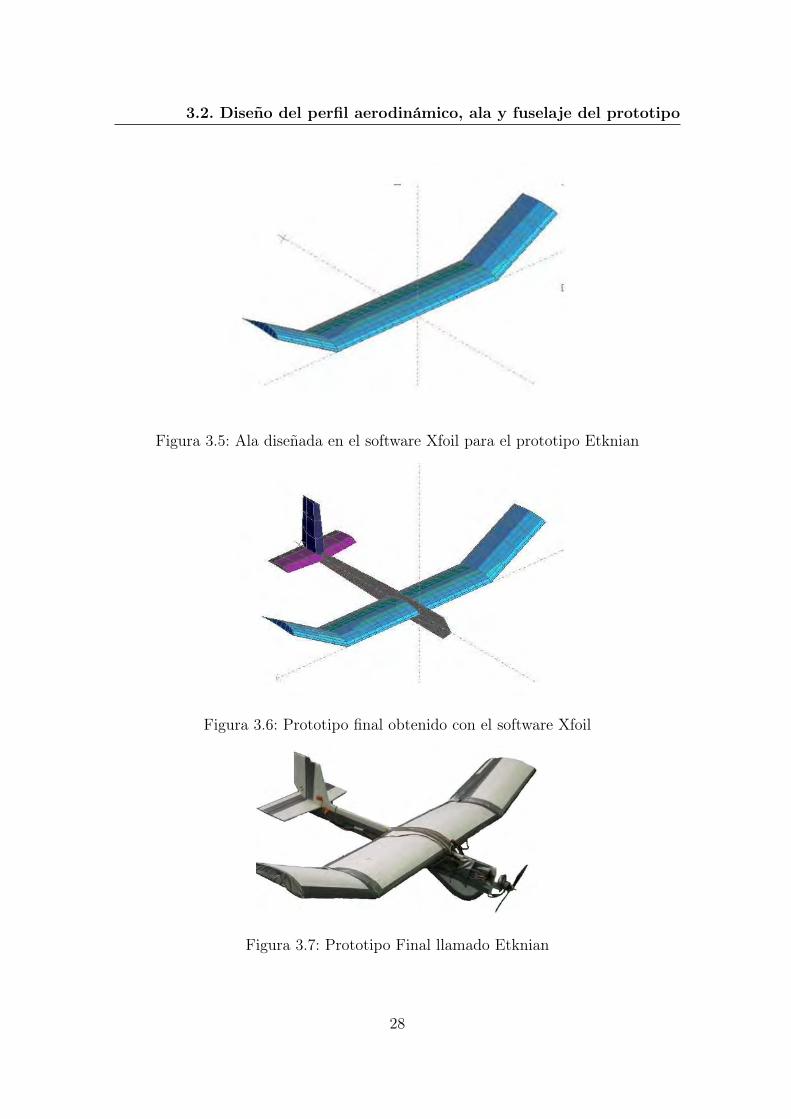
A continuación se muestra la imágen del ala diseñada mediante software Xfoil(figura 3.5) para el prototipo Etkanian.
Como resultado se obtienen, mediante el uso de los softwares de diseño los proto-tipos finales (figuras 3.6 y 3.7).
27
3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
Figura 3.5: Ala diseñada en el software Xfoil para el prototipo Etknian
Figura 3.6: Prototipo final obtenido con el software Xfoil
Figura 3.7: Prototipo Final llamado Etknian
28
3. Diseño y construcción del prototipo
3.2.2. Prototipo RafKinga
La realización del prototipo denominado RafKinga se diseñó con la finalidad deproteger la hélice y el motor ya que constantemente se dañaban. A su vez, se trató dedisminuir la masa del vehículo respecto al primer prototipo, incrementar la robustezdel ala y aumentar la fuerza del levantamiento generada por el ala. La velocidaddeseada de vuelo y la masa a soportar por el vehículo continua siendo la misma quela del prototipo anterior que es de 7,5m/s y 1kg, respectivamente.
3.2.2.1. Características y elementos del prototipo RafKinga
Hay que señalar que para este segundo prototipo se utilizó el mismo perfil aero-dinámico previamente diseñado y usado en el primer prototipo. Sin embargo, al alase le hicieron modificaciones en lo que respecta a su longitud para incrementar susuperficie alar y por lo tanto, tener una mayor sustentación.
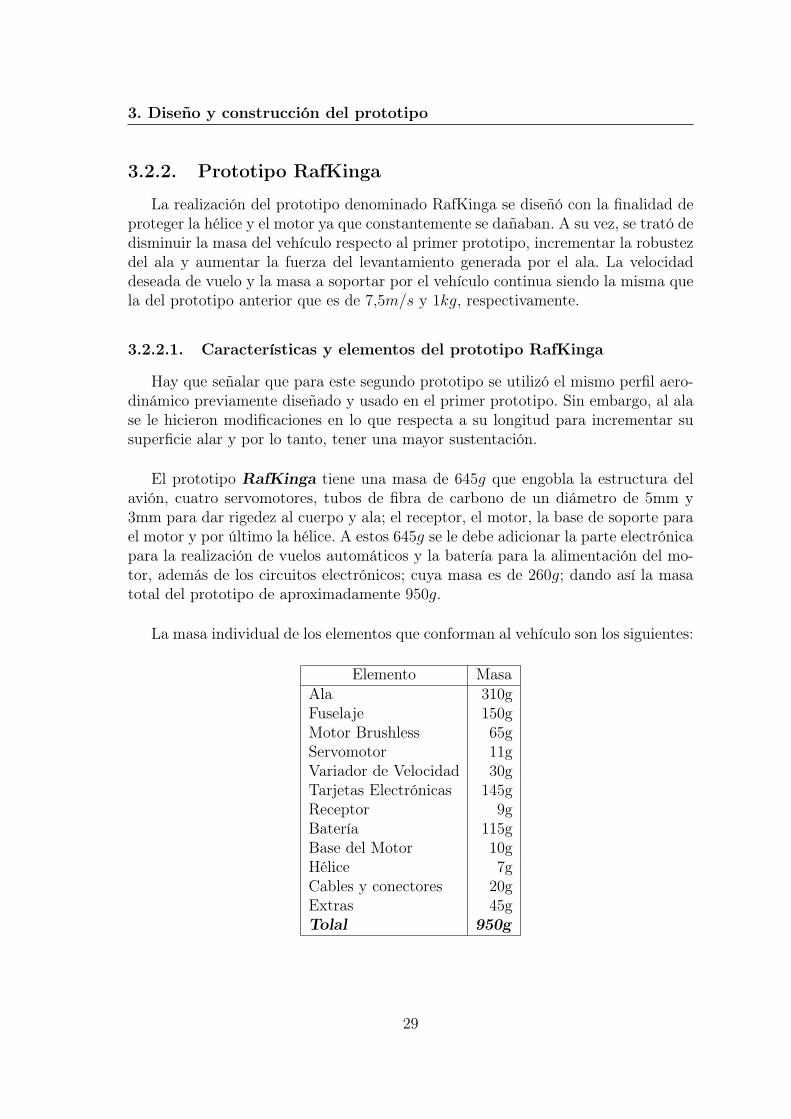
El prototipo RafKinga tiene una masa de 645g que engobla la estructura delavión, cuatro servomotores, tubos de fibra de carbono de un diámetro de 5mm y3mm para dar rigedez al cuerpo y ala; el receptor, el motor, la base de soporte parael motor y por último la hélice. A estos 645g se le debe adicionar la parte electrónicapara la realización de vuelos automáticos y la batería para la alimentación del mo-tor, además de los circuitos electrónicos; cuya masa es de 260g; dando así la masatotal del prototipo de aproximadamente 950g.
La masa individual de los elementos que conforman al vehículo son los siguientes:
Elemento MasaAla 310gFuselaje 150gMotor Brushless 65gServomotor 11gVariador de Velocidad 30gTarjetas Electrónicas 145gReceptor 9gBatería 115gBase del Motor 10gHélice 7gCables y conectores 20gExtras 45gTolal 950g
29

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
Por otro lado el prototipo cuenta con una embergadura de 2,10m dividida en tressecciones (figura 3.8). La primera sección corresponde a una superficie rectangular de1,40m de largo por una cuerda de 25cm de ancho y 2,5cm de alto. Las dos seccionesrestantes corresponden a dos superficies rectangulares llamadas diedros, donde lasdimensiones de cada una de ellos es de 30cm de largo por una cuerda de 25cm deancho y 2,5cm de alto; estas superficies se colocan en cada uno de los extremos del alacon una inclinación de 25 grados respecto a la horizontal, esta inclinación tambiénes conocida como ángulo diedro. Los diedros sirven para aumentar la estabilidad delavión.
Figura 3.8: Perfil Aerodinámico y Ala del prototipo RafKinga
El fuselaje o cuerpo del prototipo (figura 3.9) tiene una longitud de 85cm delargo por 10cm de ancho en la parte frontal y en la parte trasera se reduce a 3cm yaque el estabilizador vertical y horizontal estan soportados por una placa y un tubode fibra de carbono. Un punto importante en el cual se debe hacer hincapié, es que apesar de que las dimensiones del ala del segundo prototipo son mayores comparadascon las del primero, la masa total del segundo vehículo es menor.
30

3. Diseño y construcción del prototipo
Figura 3.9: Fuselaje del prototipo RafKinga
3.2.2.2. Parámetros aerodinámicos del prototipo RafKinga
El perfil aerodinámico empleado fue el NACA 6412 diseñado en el softwareJavaFoil y Xfoil. Donde los parámetros aerodinámicos reales del ala son los siguien-tes:
Variable ValorPerfil NACA 6412Cuerda (C) 0.25mEmbergadura (b) 2.10mEspesor (Tck) 12.83 %Camber (Cmb) 6.61 %
Los resultados para el segundo prototipo se obtienen a partir de las ecuaciones3.1 y 3.3. Cabe aclarar que los valores del coeficiente de lift Cl = 0,76, la densidaddel aire ρ = 1,2210kg/m3, la cuerda c = 0,25m, la velocidad V = 7,5m/s y el ángulode ataque α = 5 no cambian respecto al primer prototipo; donde si existe un cambioes en la longitud del ala que ahora es de l = 2,10m y como consecuencia también semodifica la superficie alar S y el levantamiento (Lift) L.
Por lo tanto, de la ecuación 3.3 podemos calcular la Superficie alar S para elnuevo prototipo, así como se obtuvo la Presión dinámica q = 34,3406Pa (ecuación3.5) y el valor de la superficie alar S = 0,5250 (ecuación 3.12).
S = (0,25m)(2,10m)
S = 0,5250m2 (3.12)
Teniendo de esta forma, los datos necesarios para resolver la ecuación 3.1 y asíconocer el Levantamiento (Lift) L para el nuevo prototipo dado por la ecuación 3.13.
31

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
L = (0,76)(34,3406Pa)(0,5250m)
L = 13,7018N (3.13)
Para comprobar que el ala del UAV es capaz de soportar la masa del vehículose emplea La Segunda Ley de Newton ecuación 3.9. Para poder hacer el cálculose requere el resultado de la fuerza de levantamiento ecuación 3.13 y el valor de laaceleración gravitacional a = 9,8m/s2, despejando la masa m de la ecuación 3.10 seobtiene la masa del UAV dada por
m =13,7018N
9,8m/s2
m = 1,3981kg ≈ 1,4kg (3.14)
Como se puede observar, el levantamiento (Lift) generado por el ala es el sufi-ciente para soportar la masa del avión que es de 950g y además existe la posibilidadde añadirle más componentes al UAV con una masa menor a 450g. Por ejemplo sele podría añadir otra tarjeta electrónica, un GPS, etc, para que sea capaz de desem-peñar una mayor cantidad de tareas.
En la figura 3.10 se muestra la imágen del ala diseñada mediante software Xfoil(figura 3.10) para el prototipo RafKinga.
Como resultado final del uso de los softwares de diseño, de los conceptos yparámetros aerodinámicos se obtiene el prototipo final (figuras 3.11 y 3.12).
El prototipo mostrado en la figura 3.11, es el previo al vehículo definitivo, el cualno fue utilizado por dos principales razones:
1. El ala se encontraba sujetada por dos soportes, en la parte inferior era el cuerpodel aeroplano y en la parte superior una estructura en forma de media luna,la cual no contaba con la rigidez suficiente para resistir los impactos ocurridosen el ala.
2. La estructura en forma de media luna, se podía reforzar poniendo placasde fibra de carbono alrededor, pero el peso del vehículo se incrementabaconsiderablemente; optando por diseñar una configuración distinta para so-portar el ala.
32

3. Diseño y construcción del prototipo
Figura 3.10: Ala diseñada en el software Xfoil para el prototipo RafKinga
Figura 3.11: Prototipo previo al prototipo final
33

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
Como nuevo resultado, se pusieron cuatro soportes triangulares en el fuselajepara tener un adecuado soporte del ala (figura 3.9); de esta forma se alcanzó elobjetivo de hacer un UAV robusto (figura 3.12).
Figura 3.12: Prototipo final llamado RafKinga
34