making of an augmented reality cage used delaunay · pdf...
TRANSCRIPT

平成 22年度 公立はこだて未来大学卒業論文
ドロネー三角形分割を用いた拡張現実飼育箱の制作
根岸 一磨
複雑系科学科 1007056
指導教員 迎山 和司
提出日 2011年 1月 31日
Making of an Augmented Reality Cage Used DelaunayTriangulaion
by
Kazuma NEGISHI
BA Thesis at Future University Hakodate, 2011
Advisor: Kazushi MUKAIYAMA
Department of Complex
Future University Hakodate
January 31, 2011

Abstract– ”Augmented Reality Cage” is an Augmented Reality media art work which a userput something in it, then the thing moves. Through Augmented Reality Cage, the user feelsthe augmented reality like the input thing is living. When a user put something in AugmentedReality Cage, Augmented Reality Cage applies the background subtraction and delaunay trian-gulation. As a goal to move a caged anything, apply processing for each caged thing. After that,Augmented Reality Cage reflects the thing moving with connected display. To show a thingis moving, I suggest to flex the polygon from elaunay triangulation that textured the thing’spicture from background subtraction. In the process of delaunay triangulation, make out a jointor not from picture at once. In addition, user can communicate to the thing by clapping thebody of Augmented Reality Cage, then accosted thing reacts that sound. As the future tasks,there are upgrading the body of Augmented Reality Cage, implementing projection transform,and to increase the moving animation pattern.
Keywords: Augmented Reality,Background subtraction,Delaunay triangulation,Interaction
概 要: 「拡張現実飼育箱」は, 体験者が物体を入れると, その物体が動き出すという拡張現実感を表現したメディアアート作品である. 体験者は自分の入れた身の回りの物体がまるで生きているかのように体験することが出来る. 体験者が拡張現実飼育箱に物体を入れると, 拡張現実飼育箱は物体に対して背景差分法, ドロネー三角形分割を適用する. どんな物体でも入れられれば動かせることを目標に,入れられた物体に対してそれぞれ処理を行う. 処理が終わると,拡張現実飼育箱は本体に接続されたディスプレイ上に物体の動く姿を映し出す. 物体を動かすように見せるには,ドロネー三角形分割で得られた三角形に背景差分法で得られた画像を貼り付けたポリゴンを動かすことで表現する. ドロネー三角形分割を行う際に, 物体の画像から関節・非関節の判断も行い, 動きのパターンに反映している. さらに, 体験者は映し出された映像に対して拡張現実飼育箱の本体を叩くことで呼びかけることができ, 呼びかけられた物体は反応して動きを見せる. 今後は, 本体の改良に加え, 射影変換のシステムの実装や物体の動作パターンの増加を行う.
キーワード: 拡張現実感,背景差分法,ドロネー三角形分割,インタラクション

Making of Augmented Reality Cage
目 次
第 1章 序論 1
1.1 目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
第 2章 関連研究 3
2.1 物体の堅さを表現した 2次元形状の操作手法 . . . . . . . . . . . . . . . . 3
2.2 Kobito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Haptic Ring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
第 3章 システム 5
3.1 作品概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2 作品動作概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2.1 背景差分法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2.2 射影変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2.3 インタラクション . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
第 4章 ドロネー三角形分割 14
4.1 概説 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.2 アルゴリズム . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.2.1 3点目までの動き . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2.2 4点目以降の動き . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 AR飼育箱への実装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.3.1 点の挿入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.3.2 不要三角形の削除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.3 グループ化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3.4 アニメーション . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
第 5章 展示と評価 30
5.1 公立はこだて未来大学オープンキャンパス . . . . . . . . . . . . . . . . . . 30
5.1.1 展示内容 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1.2 観察結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2 Make Tokyo Meeting 06 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2.1 展示内容 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2.2 観察結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.3 公立はこだて未来大学オープンラボ . . . . . . . . . . . . . . . . . . . . . . 31
i
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
5.3.1 展示内容 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.3.2 観察結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.4 2010年度公立はこだて未来大学情報デザインコース卒業研究展示会 . . . . 32
5.4.1 展示内容 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.4.2 観察結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
第 6章 結論 34
6.1 考察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.2 まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.3 今後の方針 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
ii
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
第1章 序論
本研究の目的と背景を述べる.
1.1 目的
拡張現実感を用いた,人々が楽しめる作品を制作する. 拡張現実感とは,現実の情報に電子情報を付加し,合成して表示する技術である. 拡張現実感を用いた通常ではありえない感覚を体験できる作品を目指す.
1.2 背景
近年,技術の発達により,現実の世界とリンクした情報処理の概念が広まっている. 例えば,セカイカメラは現実の位置情報を取得し,場所に応じた電子情報がデバイスに表示されるアプリケーションである [1]. セカイカメラのユーザは,デバイスを通じてセカイカメラユーザの位置情報を送受信し,拡張現実感を体験する. デバイスとは機器のことであり,セカイカメラは softbankの iPhoneといった携帯電話等のデバイスで使用することができる[2]. 位置の情報はデバイスの全地球測位システム (GPS)から取得でき,ユーザは位置の情報にエアタグと呼ばれる仮想のマーカーを設置することができる. エアタグにはメッセージや画像・音声等を入れることができ,セカイカメラを使って他人の設置したエアタグを読み取ることも出来る.
図 1.1: iphone[2] 図 1.2: セカイカメラ [1]
1
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
また,特定のマーカー上をカメラで撮影すると 3D映像が映りこむARToolKitというソフトウェアライブラリがある [3]. これは,ARToolKitを利用したプログラムがマーカーを読み取ることで,マーカーに応じた映像をディスプレイ上に表示するものである. 現実には存在しない物体が,ディスプレイ越しには見えるという拡張現実感である. 表示される映像はマーカーの向きや大きさといった情報を認識する.例えば,体験者がマーカーを傾ければ映像も傾いたり, 遠くからマーカーを撮影すれば映像が小さくなったりと,現実の情報とリンクして表示される.
図 1.3: ARToolKitを使用した拡張現実感 [3]
これらのアプリケーションのように,拡張現実感は現在コミュニケーションツールやエンターテインメントとして広く利用されている. そこで,本研究では拡張現実感を用いて,
入れた物体がまるで生きているかのように動きだすという作品を制作する.
2
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
第2章 関連研究
2.1 物体の堅さを表現した2次元形状の操作手法
東京大学の五十嵐健夫らは,投影された画像を指でつまんだり,伸ばしたり自由に形状を操作できる手法を提案している [4]. 五十嵐の手法では,画像の形状を変更する際に,ドロネー三角形分割を行っている. ドロネー三角形分割を行うと,指定された領域内が三角形で分割される. 五十嵐は動かしたい画像を領域としてドロネー三角形分割を行って分割している. ドロネー三角形で得られた三角形を固定または移動させ,それに対応した画像の部位を動かすことで画像を変形させている. 本研究では五十嵐の提案を参考にし,ドロネー三角形分割を用いている.ドロネー三角形分割については4章で述べる.
図 2.1: 物体の堅さを表現した 2次元形状の操作手法 [4]
2.2 Kobito
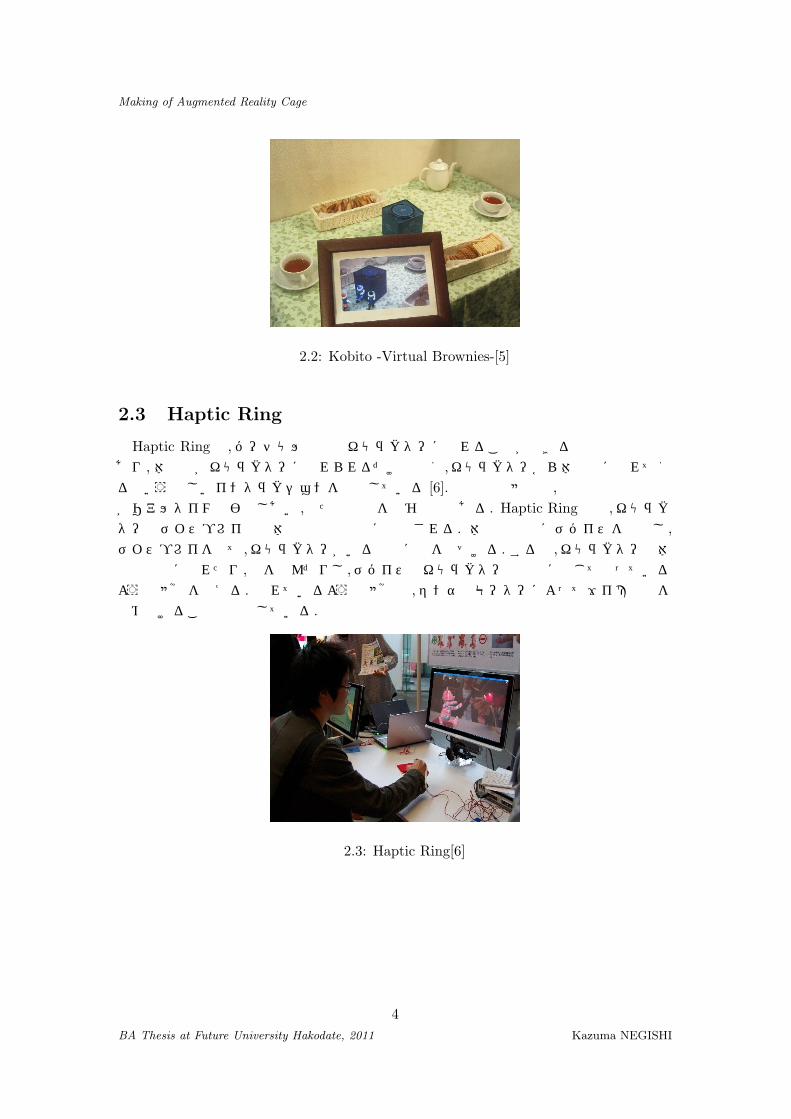
Kobitoは,東京工業大学の青木孝文らによって制作されたバーチャルリアリティ(仮想の世界や体験を実際の感覚として味わえる技術,手法) 作品である [5]. これまでの,視覚や聴覚で体験するバーチャルリアリティに対し,Kobitoは画面上の生物が現実世界の物体を動かすという方法で妖精を表現した作品である. 体験者は、用意された机の上に置かれた物体が勝手に動くという不思議な体験をする. 動いている物体にKobito Windowと呼ばれるデバイスをかざすと,妖精「Kobito」が物体を押している様子が確認できる. また,体験者が物体を動かすと,Kobitoはそれに対して反応を示す. このように,現実の物体を通じて,まるで机の上に本当にKobitoがいるような感覚を味わうことができる.
3
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI
Making of Augmented Reality Cage
図 2.2: Kobito -Virtual Brownies-[5]
2.3 Haptic Ring
Haptic Ringは,バーチャル空間のキャラクターに触れることができる複合現実作品であり, 体験者がキャラクターに触れられるだけでなく,キャラクターから体験者に触れてくるという新しいインタラクションを実現している [6]. 複合現実感とは,現実と仮想のものがリアルタイムで影響しあい,新たな表現を生む手法である. Haptic Ringでは,キャラクターはディスプレイ上で体験者の目の前に表示される. 体験者は手にデバイスを装着し,
ディスプレイを見て,キャラクターがいる場所に手を近づける. すると,キャラクターは体験者の手に触れたり,手を拒んだりし,デバイスはキャラクターの動作に応じて触っているような感覚を与える. 触れているような感覚は,センサとモーターによってワイヤで指を締め付けることで表現している.
図 2.3: Haptic Ring[6]
4
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
第3章 システム
拡張現実飼育箱 (以下AR飼育箱)の仕様を説明する.
3.1 作品概要
AR飼育箱は,自分の身の回りの物体がまるで生きているかのように動き出すという拡張表現を用いたメディアアート作品である. 体験者は身の回りの物体を AR飼育箱に入れ,AR飼育箱に設置されたディスプレイを覗くことで物体の動く様子を見ることができる.
また,AR飼育箱の名前の通り,物体を箱の中で飼っているように感じさせるため, 実際に水槽や飼育箱を叩いてペットを呼びかけるといった動作に注目し,AR飼育箱に取り入れている.
AR飼育箱は以下のもので構成されている.
図 3.1: AR飼育箱接続図
• ディスプレイ CG-L17ASWV2
• USBカメラ PWC-30ISW
• 赤外線発光ダイオードを用いて制作した照明
• Gainer mini + 圧電スピーカー SPT08
5
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
• コンピュータ
図 3.2: AR飼育箱本体
AR飼育箱本体は木製であり,飼育箱の大きさは天井代わりに使用するディスプレイの大きさに合わせて制作し, およそ幅 45cm,奥行き 35cm,高さ 45cmとなった. AR飼育箱には蓋があり,ディスプレイを入れて蓋をはめると,ディスプレイの液晶部分のみが露出するようになっている. AR飼育箱内部,ディスプレイの裏側にはUSBカメラが設置してあり,AR飼育箱内の底面を上から撮影する. この USBカメラは赤外線フィルタを検知することができるようになっている. USBカメラが写す底面にはアクリル板 (厚さ 3mm,乳白色)と 104個の赤外線発光ダイオードを並べて制作した照明を設置している. 照明の電源はコンピュータのUSBから供給され, 天井のUSBカメラは赤外線で発光する照明を背景として物体の画像を上から撮影する形となる.
6
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 3.3: 断面図
図 3.4: USBカメラを設置した様子
7
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 3.5: 赤外線発光ダイオードを用いた照明
図 3.6: 赤外線照明 裏
8
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI
Making of Augmented Reality Cage
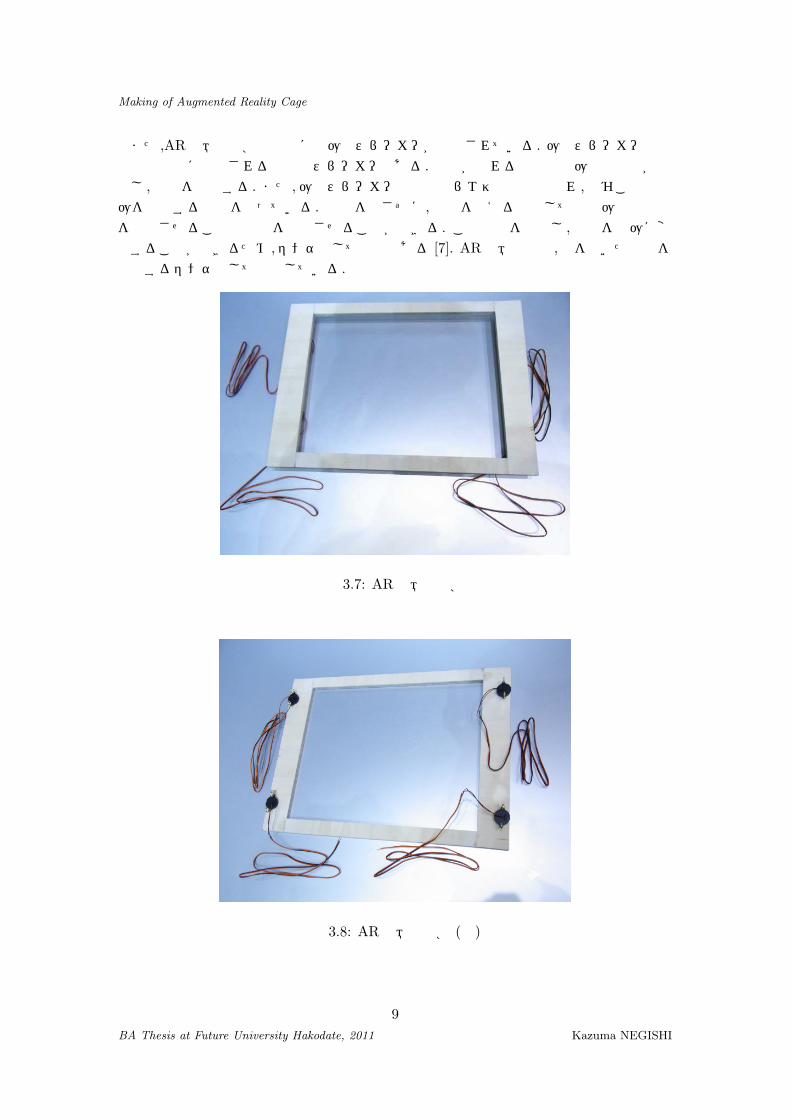
また,AR飼育箱の蓋の裏側には圧電スピーカーが設置されている. 圧電スピーカーとは電子機器等に利用される小型のスピーカーである. 電流が流れると内部の圧電振動板が振動し,音波を発生する. また,圧電スピーカーの材料はピエゾ素子と呼ばれ,歪むことで電圧を発生する性質を持っている. 電流を流さずに,衝撃を加えるなどして直接圧電振動板を振動させることで電流を発生させることができる. この性質を利用し,振動を電圧に変換することができるため,センサとして有用である [7]. AR飼育箱では,箱を叩いた振動を検知するセンサとして利用している.
図 3.7: AR飼育箱の蓋
図 3.8: AR飼育箱の蓋 (裏)
9
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 3.9: 圧電スピーカー
AR飼育箱内壁に設置された圧電スピーカーは,箱に加えられた振動を検知すると,信号を Gainer miniを通してコンピュータへと送る. Gainer miniはセンサからの情報をコンピュータで扱う際に有用なツールキットである. 圧電スピーカーから得られた信号はGainer miniを通すことで数値のデータとしてコンピュータ上で利用することが出来る.
図 3.10: Gainer mini
USBカメラによる物体の画像の取得や物体を動かすプログラムの一連の動作は,AR飼育箱に接続するコンピュータが行う. USBカメラやディスプレイのケーブル等は底面の穴から外へ逃がすことができ,コンピュータに接続される. コンピュータはオペレーティングシステムがWindows Vista Home Premium,CPUは Intel(R)Core(TM)2 CPU@T5500
1.66GHz,メモリは 1.0GBのものを用いる.
10
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 3.11: AR飼育箱底
3.2 作品動作概要
コンピュータで行われる処理は,Processing 1.1が遂行する. Processingはプログラミング言語の一つであり,USBカメラの操作や画像の処理が行い易いと感じたためAR飼育箱に使用した [8]. AR飼育箱において Processingは,USBカメラからの画像の取得,取得した画像の切り抜き,画像に対するドロネー三角形分割, 画像を生きているように見せる画像変形の処理を行い,ディスプレイに物体の動く様子を映す.圧電スピーカーから信号を受け取るGainer miniも Processingが制御している.
3.2.1 背景差分法
AR飼育箱に入れた物体の画像を物体の輪郭に沿って切り抜くために,背景差分法を用いる. 背景差分法とは,元となる画像と比較用の画像を見比べ,異なる部分を抜き出す (もしくは同じ部分を無視する)画像処理の方法である. 例えばテレビの天気予報では,背景を一色に統一することで人物を切り抜き,背景に映像を合成している [9]. 通常,背景差分法を用いた場合,自然光の影響により物体の輪郭が暈け,本来の輪郭通りに綺麗に切り抜くことは難しい. そこでAR飼育箱では,赤外線を用いた背景差分法を行う. 赤外線を光源に用いることで,自然光の影響を抑えて物体の輪郭を検出することができる [10]. まず,USBカメラには赤外線フィルター (IR86)を貼り付け,赤外線を確認できるようにしている. AR飼育箱底面の赤外線発光ダイオードを点灯させると,アクリル板一面が赤外線の光で照らされる. 体験者により物体はアクリル板の上に置かれるため,天井に設置されたUSBカメラは赤外線の光を背景として物体の画像を取得する形となる. さらに,USBカメラの画質を調整するソフトAmcap[11]を使い USBカメラの露出値を調整する. 赤外線フィルターを装着し,画質を調整したUSBカメラからは, 赤外線を白い背景として鮮明な輪郭を持つ物体の黒いシルエットの画像を得ることができる.
11
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 3.12: 左:通常の背景差分法 右:赤外線を用いた背景差分
3.2.2 射影変換
赤外線を使用した背景差分だけでは,物体の色の情報を取得できないため,射影変換を用いる [12]. 射影変換とは,視点の違う2点のずれを補正するアルゴリズムであり,プロジェクターの台形補正等に用いられている. 射影変換を行う場合,USB カメラ UCAM-
DLG200HWHを一台,箱の内部に追加設置する. 赤外線カメラの画像から,物体と背景を分けることが出来たので,これを基準に通常の USBカメラの映像と合成する. この際,赤外線カメラと通常のカメラを空間上同じ位置に設置することは物理上不可能である. そこで,なるべく至近距離に置いた2台のカメラの画像の誤差を射影変換によって合わせる方法をとる.
射影変換では入力される図の座標を予想する出力図の座標と対応させることで,図の歪み,
傾き等を変化させることが出来る. 四角形の平面を射影変換する場合,平面を形成する4点の座標を (xi, yi)(i=1,2,3,4), 射影変換後の4点を (Xj , Yj)(j=1,2,3,4) とした場合,以下の行列式で表すことが出来る.
X1X2X3X4Y1Y2Y3Y4
=
x1 y1 1 0 0 0 −X1x1 −X1y1x2 y2 1 0 0 0 −X2x2 −X2y2x3 y3 1 0 0 0 −X3x3 −X3y3x4 y4 1 0 0 0 −X4x4 −X4y40 0 0 x1 y1 1 −Y1x1 −Y1y10 0 0 x2 y2 1 −Y2x2 −Y2y20 0 0 x3 y3 1 −Y3x3 −Y3y30 0 0 x4 y4 1 −Y4x4 −Y4y4
abcdefgh
このとき,係数 (a, b, c, d, e, f, g, h)については,変換前と変換後の4点の座標をそれぞれ代入することで解くことが出来る.
3.2.3 インタラクション
AR飼育箱に入れた物体は,箱を叩いて呼びかけることができる. AR飼育箱を制作する当初,「入れた物体がまるで生きているかのように動く」という点と「箱の中に物体を入れる」という点の二つから, 飼育箱をイメージした.飼育箱に入れたペットに対して行う動作を考えたとき,眺める・餌をやる・呼ぶといった行動が考えられた. 一方で,AR飼育箱の形状を考えた際,箱を叩くというインタラクションに注目し,物体を叩いて呼びかけるというコンセプトに至った. AR飼育箱に物体を入れ,AR飼育箱の上部側面を叩くと,裏に設置さ
12
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
れた圧電スピーカーが振動を検知し,叩かれた方向に寄っていく. また,物体は呼びかけに応じて移動した後,20秒の間に箱を叩かれることがない場合は元の位置 (一番最初に物体に置かれた位置) に戻っていくようになっている. 物体が自動で元の位置に戻ることで,体験者は物体を元の位置に戻すためにAR飼育箱を叩くことなく物体に繰り返し呼びかけることができる.
図 3.13: 箱を叩くインタラクション (仮図)
13
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
第4章 ドロネー三角形分割
AR飼育箱に導入したドロネー三角形分割について説明する.
4.1 概説
ドロネー三角形分割とは空間分割法の一つである. ドロネー三角形分割を行うことで,空間は隙間無く三角形で分割される.
図 4.1: ドロネー三角形分割
1934年にBoris Delaunayによって考案されたドロネー三角形分割は,以降多くの学者達によって研究されている [15].
4.2 アルゴリズム
本研究のドロネー三角形分割は,点の挿入と分割の処理を繰り返すというものである. 分割の処理には,ドロネー三角形分割で既に生成された三角形の内部での分割と, 既に生成されたどの三角形内部にも含まれず,全三角形の集合からなる多角形 (凸包と呼ぶ)を形成する2種類がある. ドロネー三角形分割の最大の特徴は,点が挿入される度に,既存の三角形が持つ外接円内に他のいずれの点も含まないように全体の三角形を生成することである[14]. 生成される三角形は,辺の向きを反時計回りと設定することで,隣接する三角形の情報を扱いやすくする. 以下より,詳しいドロネー三角形分割のアルゴリズムを記す.
14
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.2: 基本的な動作
4.2.1 3点目までの動き
まず,最初の三角形を生成するために,点を3つまで挿入したとする.
図 4.3: 3点を挿入
次に,この3点から出来る三角形の辺の向きを決定する. 4点目以降から,最初に決定した辺の向きと挿入点の座標によって生成される三角形が決定されるため, 最初の三角形の辺の向きの決定が全体の三角形の辺の向きの基準になるといえる. p1を始点,p2を終点とする向きの辺を e1と仮定し,p3が e1の左右どちら側にあるかを判定する.
辺と点の位置関係を得るために,辺の直線式を求める. 任意の点 pの直交座標における位置を (x, y)とした時の直線式は
ax+ by + c = 0 (a, b, cは整数) (4.1)
で表すことができる. p1と p2の2点間の傾きはxと yの増加量から得られる.p1 = (x1, y1),
15
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.4: 向きの決定
p2 = (x2, y2)とすると,
傾き y1 − y2x1 − x2
(4.2)
直線式を変形し,
y = −a
bx− 1
bc (4.3)
とする. 一次式の傾きと p1p2の増加量は等しいので,
y1 − y2x1 − x2
= −a
b(4.4)
a = y2 − y1 (4.5)
b = x1 − x2 (4.6)
となる. 残る係数 cを求めるため a,b,x = x1, y = y1を (4.1)式に代入すると,
(y2 − y1)x1 + (x1 − x2)y1 + c = 0 (4.7)
c = −x1y2 + x1y1 − x1y1 + x2y1 (4.8)
c = x2y1 − x1y2 (4.9)
となり,辺 p1p2を表す式の係数が得られた. 点と直線の関係から,
s = ax3 + by3 + c (4.10)
について,s > 0なら点は直線の左側,s < 0なら右側,s = 0なら直線上に位置することが分かる.
基準となる最初の辺 e1 : p1→ p2を結ぶ. もし p2が e1の右側にあるのならば,p2→ p3となる辺の向きが反時計回りにならないため,p1と p2を入れ替える. このとき,「p1から p2」
16
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.5: 直線の決定
という接続情報 (ノードと呼ぶ)は変更されないため,e1の向きが逆転する. e1の向きが逆転したことで,p3は e1の左側に位置することになり,反時計回りに p1→ p2→ p3を結ぶことができる. p3が e1の左側にある場合は,順に p1→ p2→ p3と結ぶだけで反時計回りとなる.
もし p3が p1,p2を通る直線上に存在するとき,p1,p2,p3は三角形を形成しないため p3を削除し, 新たな位置に点 p3を挿入する.
図 4.6: 向きの決定
次に,p2 と p3,p3 と p1 を結び三角形を形成する. このとき,ノードを p2→ p3,p3→ p1 とすることで, p1→ p2→ p3→ p1 という「この頂点の次の点は何か」という情報や, e1(p1
→ p2)→ e2(p2→ p3)→ e3(p3→ p1)という「次の辺」の連結情報をを反時計回りに得ることができる [15]. ある点や辺に対して向きが一定である連結情報は,後に述べるアルゴリズムに有用である.
17
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
4.2.2 4点目以降の動き
4点目からは,挿入される点の位置と最初に設定した辺 e1の向きに応じた処理を加える.
辺 e1の直線式は求めてあるため,(4.10)のように挿入される点の座標を代入し正負の判定を行うことで位置関係を確認することが出来る. 例えば4点目の挿入点では,3点目を挿入した時と同じように,辺 e1と挿入点の位置関係を比べ,位置に応じた処理を加える.
処理1.凸包の拡大
挿入点が生成されたどの三角形内部にも含まれないとき,挿入点を凸包に新たな頂点として加え,凸包を拡大する. ドロネー三角形分割における凸包とは,生成された三角形群の一番外側,他の三角形に触れていない辺を結んだものである.
図 4.7: 凸包
18
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
ドロネー三角形分割において,挿入点がどの三角形内部にも含まれないとき,つまり生成されている凸包より外側に点が挿入されるとき,凸包の拡大を行う. 挿入点が凸包の外側にあるかどうかという判定は,最初に設定した辺 e1によって行う. 具体例として,ある三角形に対して凸包の拡大を行う. ドロネー三角形分割のもっとも単純な凸包は,初めの三角形である.
図 4.8: 凸包の頂点の追加
19
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI
Making of Augmented Reality Cage
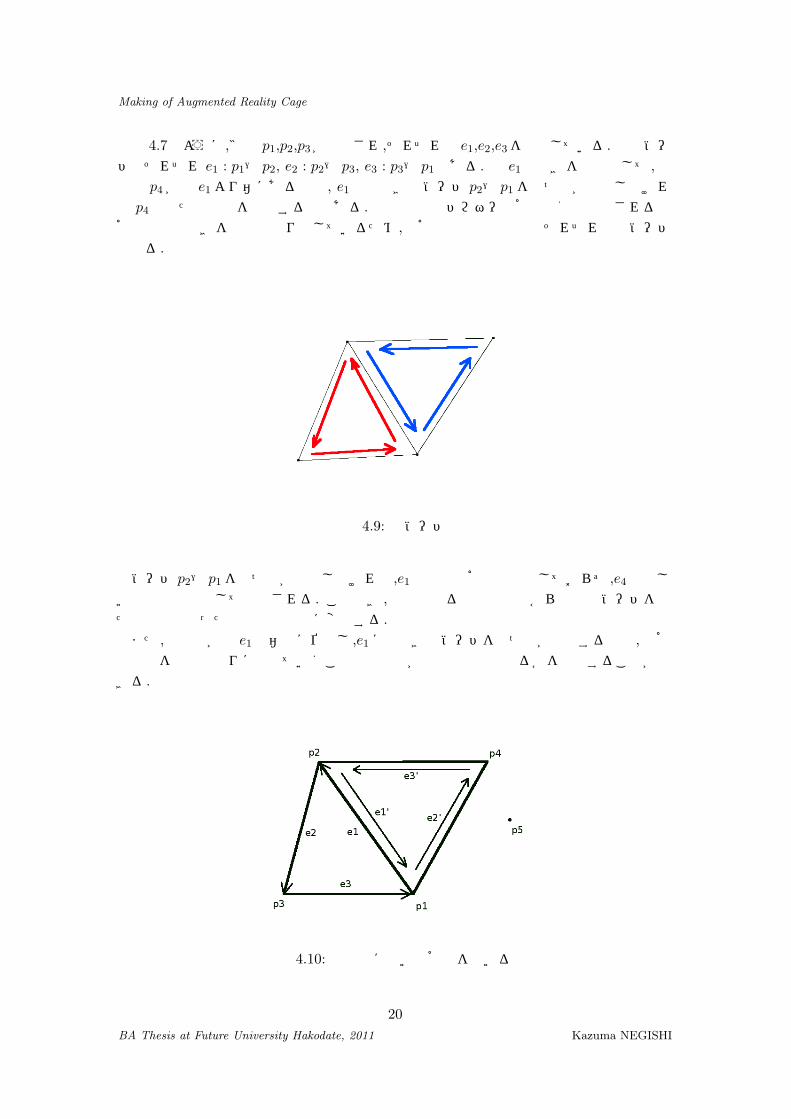
図 4.7のように,3点 p1,p2,p3が挿入され,それぞれ辺 e1,e2,e3を形成している. 辺のノードはそれぞれ e1 : p1→ p2, e2 : p2→ p3, e3 : p3→ p1である. 辺 e1の向きを基準として,挿入点 p4が辺 e1より右にある場合, e1の逆向きのノード p2→ p1を持つ辺が存在しなければ p4は新たな凸包を形成する点である. 本論文ではドロネー三角形分割で生成される三角形の辺の向きを反時計回りとしているため,三角形同士の共有辺はそれぞれ逆のノードとなる.
図 4.9: 逆ノード
ノード p2→ p1を持つ辺が存在しなければ,e1はどの三角形とも接しておらず,e4は新しい凸包の頂点として追加される. このとき,基準となる辺の前の辺からの凸包ノードを新たな頂点となった挿入点との辺に変更する.
また,挿入点が辺 e1の右側に位置し,e1に逆向きのノードを持つ辺が存在する場合, 三角形の辺を反時計回りに調べていくことで挿入点が凸包の頂点となるかを判別することができる.
図 4.10: 挿入点に近い三角形を用いる
20
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.9のように,e1の右側に p5が存在し,基準となる辺 e1に逆向きのノード e′1が存在する場合, e1の右側に p5が存在するという情報だけでは,p5が三角形 p1p2p4の内部に挿入されている場合があるため, 三角形 p1p2p4を基準として考える. e′1と p5を比べると,p5は e′1の左側に位置するため,次の辺を確認する. e′1から反時計回りに,次の辺となる e′2と p5の位置関係を確認する. p5は e′2の右側に位置していることが分かるので,p5は凸包を形成する頂点であるといえる. なぜならば,反時計回りの辺で形成される三角形において, ある点がいずれかの辺の右側に存在し,その辺がどの三角形とも接していないならば,その点は三角形の外部だからである.
図 4.11: 辺の左右と点
このように,最初に設定した基準となる辺 e1 が既に他の三角形と接しているときでも,
接している辺をたどって挿入点に近い三角形と比較することで凸包へ追加するかを判別することができる.
点 p4が辺 e1の左側に位置する場合も同じである. 挿入点 p4が辺 e1より左に位置する場合,三角形 p1p2p3の各辺と p4の位置関係を確認する. p4が基準となる辺 e1より左側であるという情報だけでは三角形 p1p2p3の内部に挿入された可能性があるため,これだけでは判別できない. そこで,ノード p1→ p2より,辺 e1→ e2をたどる. p4と e2では,p4は,辺e2の右側にあるため,p4は凸包をなす頂点といえる.
処理2.三角形内部での分割
ドロネー三角形分割で生成された三角形の内部に点が挿入されると,挿入点を含む三角形は基本的に3つに分割される. 三角形内部に点が挿入された場合,凸包とは逆で,挿入点を内包する三角形の全ての辺において左側に挿入点が位置する.
21
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.12: 三角形内部の挿入点
全ての辺の左側に挿入点 p6があると確認できたら,分割を行う. まず,三角形の各頂点とp6を結ぶ. このとき,辺 p1p6,辺 p2p6,辺 p2p6のノードは,辺 e1,e2,e3のノードと合わせて反時計回りになるように p1→ p6,p2→ p6,p3→ p6とする. 挿入点 p6によって,三角形 p1p2p3
は p1p2p6,p2p2p6,p3p1p6の3つの三角形に分割される. このように,挿入点によってもともと生成されていた三角形をそのまま3つに分割可能なものは, それぞれの三角形の外接円内に他の点を含んでいない場合である.
図 4.13: 外接円
スワッピングアルゴリズム
三角形内部に点を挿入して分割する場合に,挿入点を含む三角形以外に分割が及ぶ場合がある. 三角形を挿入点で3つに分割した際に,3つの三角形の外接円内に他の点が含まれると,ドロネー三角形分割のルールから外れるため, いずれの点も外接円内に含まれない
22
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
ようにスワッピング (入れ替え)を行う.
3辺 e1,e2,e3 を持つある三角形が,e1 について逆向きのノードを持つ辺を含む三角形と隣接しているとする. e1を含む三角形の外接円と,e′1を含む三角形の外接円を調べ,どちらかの外接円が内接する三角形以外の点を含んでいないかを調べる. 外接円の半径がある点と外接円の中心の距離より大きければ,ある点は外接円の内部に含まれる. もし含んでいたら,スワッピングを行う.外接円内の三角形と,外接円内に侵入している点を対角線で結ぶように入れ替える [13].
図 4.14: スワッピング
このようにして対角にスワッピングを行うと,2つの三角形全体の面積を変更せず,侵入している点を無くすことができる. 同じことを三角形の残りの辺 e2,e3にも適用し,必要ならばスワッピングを行う. 三角形内に点が挿入されるたびに外接円を調べ, スワッピングを行うことで三角形の外接円内に他の点を含まないというドロネー三角形分割のルールを満たすことができる.
辺上への挿入
点の挿入先が,既に生成された三角形の辺上である場合がある. もし挿入先の辺が逆向きのノードを持っていない場合,挿入点は辺を2分割し,残りの頂点と結ぶことで三角形を2分割する. 挿入先の辺が逆向きのノードを持っている場合も,辺を2分割し,頂点と結ぶことで三角形を分割する. 新しく生成された三角形に対し,必要ならばスワッピングアルゴリズムを適用する. 辺上への挿入も,他の挿入と同じように分割することができる.
23
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.15: 辺上への挿入
4.3 AR飼育箱への実装
AR飼育箱は,中に入れられた物体の画像 (以下テクスチャ)に対してドロネー三角形分割を行う. ドロネー三角形分割によって得られた三角形にテクスチャを貼り付け,三角形を動かすことで画像が動いているように見せる. AR飼育箱におけるこれらの処理はProcessing
にてクラスDelaunayprocessor[17]を用いて実装した.
図 4.16: ドロネー三角形分割とテクスチャ
4.3.1 点の挿入
ドロネー三角形分割を行うために,テクスチャの輪郭に沿って等間隔に点を挿入する. ただし,テクスチャのそのままの輪郭線上に点を挿入してドロネー三角形分割を行うと, 生成される三角形内にテクスチャが収まりきらず,テクスチャの一部が切り取られてしまう可能性がある.
テクスチャは,三角形内に収まる部分しか貼り付けられない. 収まりきらなかった部分の
24
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.17: テクスチャのはみ出し
欠損を防ぐため,生成される凸包内に全て画像が収まるよう,ドロネー三角形分割を行う範囲を広げる. 具体的な方法として,Processing上では,まずテクスチャについて xy座標を与え,物体の存在するピクセルの座標を全て保存する. 次に,半径 18ピクセルの円を保存された全ての座標について描画していくことで,一回り大きな範囲を生成する. 円によって擬似的にピクセルを拡大することで,一回り大きなテクスチャの範囲の取得を実現した.
図 4.18: 点を挿入する範囲を拡大
大きくなった範囲の輪郭で点を挿入していくことで,欠損する恐れのある部位にカバーをすることができる. 拡大した範囲の輪郭に沿って,50ピクセルごとに点を挿入していく.
範囲を広げる際に描画する円の大きさや分割するピクセル数については,必ずしも半径 18
ピクセル,長さ 50ピクセルである必要はないが, 生成される三角形が扱いやすい大きさであるためこの数値としている.
25
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.19: 欠損のカバー
4.3.2 不要三角形の削除
本来,ドロネー三角形分割を行うと,凹凸に関係なく三角形を形成できる点は結ばれる.
図 4.20: 不要な部分まで生成されたドロネー三角形分割
AR飼育箱では,ドロネー三角形分割の終了後,生成された三角形のうちテクスチャにかからない三角形は不要なため取り除く. 不要な三角形かどうかを判定する方法として,Pro-
cessingによって,生成された三角形それぞれの色情報を調べている. 三角形の3点を含む最小の矩形を設定し,その範囲に含まれる点の座標の色を取得する. 背景差分法によって得られた画像は,背景となる部分は白で表されるため,三角形内に白以外の色が含まれる場合に必要な三角形であると判断する. ある点 (x, y)が三角形の範囲の中に存在するかどうかは以下の行列式で判定することが出来る.
26
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
s1
s2
s3
=
x3 −x3 −x2 x2 −x x2 x −x2
x1 −x1 −x3 x3 −x x3 x −x3
x2 −x2 −x x1 −x x1 x −x1
y y y
y2 y3 y1
y y y
y2 y3 y1
y3 y1 y2
y3 y1 y2
y2 y3 y1
y2 y3 y1
図 4.21: 三角形と点の包含関係
xと yの範囲は,調査する三角形の3点 (x1, y1)(x2, y2)(x3, y3)の中で最小の xと最小のyを始点として, 最大の xを横,最大の yを縦とする矩形内である. 矩形内に含まれる座標を全て調べ,s1,s2,s3を求める. このとき,ある点 (x, y)と三角形の位置関係は以下である.
s1, s2, s3 < 0または s1, s2, s3 > 0なら三角形の内側 (4.11)
s1 = 0, s2, s3 < 0または s1 = 0, s2, s3 > 0なら線分 (x2, y2)(x3, y3)上 (4.12)
s2 = 0, s1, s3 < 0または s2 = 0, s1, s3 > 0なら線分 (x1, y1)(x3, y3)上 (4.13)
s3 = 0, s1, s2 < 0または s3 = 0, s1, s2 > 0なら線分 (x1, y1)(x2, y2)上 (4.14)
三角形内の色を調べていき,1度でも上記の条件を満たす点が見つかった場合はその三角形は必要であると判断し, 1度も条件を満たす点が見つからなかった場合は不要であると判断し,その三角形は削除する. この処理をドロネー三角形分割で生成された全ての三角形に適用し,テクスチャを貼り付けるのに最低限必要な三角形を得る.
4.3.3 グループ化
ドロネー三角形分割によって生成された三角形は3種類に分けることができる. 三角形の種類は,その三角形が他の三角形に接している数によって決定される.
27
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.22: 必要な三角形を判別したドロネー三角形分割
接している数が1の三角形はドロネー三角形分割における先端を表し,エッジと呼ぶ. 接している数が2の三角形は三角形同士を繋ぐ役目を果たし,スレーブと呼ぶ. 接している数が3の三角形はドロネー三角形分割の内側にあり,ジャンクションと呼ぶ [?]. 図 4.23は,
人形の画像に対してドロネー三角形分割を行い,得られた結果のエッジを赤,スレーブを青,
ジャンクションを黄で塗った図である.
図 4.23: 3種類の三角形の区別
図 4.23から,スレーブはエッジとジャンクション,またはジャンクション同士を結ぶ役割を果たしていることが分かる. エッジからジャンクションまで,ジャンクションからジャンクションまで,スレーブで繋がっている一連の三角形を同じグループとして番号を振ると, 図 4.23の人形は頭,両腕,両端,腹といった具合に区別することができる.これをグループ化と呼ぶ.
28
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 4.24: グループ化
4.3.4 アニメーション
テクスチャを貼り付けた三角形を動かすことで,物体を生きているように動かして見せる. 三角形を動かすには,表示する三角形の頂点座標を変更すればよい. 連結している三角形を動かす場合は,共有している頂点にそれぞれ同じ変化量を与える必要がある. ドロネー三角形分割とグループ化によって得た三角形のグループを指定すれば,特定の部位のみを動かすことも可能である.
図 4.25: 三角形を動かしてアニメーションを行う
現在,実装しているアニメーションは指定したグループの三角形が波打つように動くというものである.
29
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
第5章 展示と評価
AR飼育箱をイベントに展示し,体験者からAR飼育箱の評価を得る.
5.1 公立はこだて未来大学オープンキャンパス
2010年8月8日に公立はこだて未来大学にて行われたオープンキャンパスにて AR飼育箱の展示を行い,来場者のAR飼育箱に対する反応を伺った.
5.1.1 展示内容
机にAR飼育箱を置き,来場者にAR飼育箱の説明を行い,体験をさせる. 8月8日の時点では,AR飼育箱は入れられた物体に対して通常のUSBカメラを用いた背景差分を行うものであった.
5.1.2 観察結果
AR飼育箱に物体を入れ背景差分を行うと,背景物体の画像が切り抜かれる点に興味を持つ様子が見られ, 「面白い」「自分のものも動かしてみたい」という意見が得られた.
5.2 Make Tokyo Meeting 06
2010 年 11 月 20 日,21 日, 東京工業大学Make Tokyo Meeting 06に参加した.
5.2.1 展示内容
机にAR飼育箱を置き,体験者にAR飼育箱の説明を行い,体験をさせる. この時点では,
物体に赤外線を用いた背景差分法を行い,Processingのライブラリの一つである shapetween
を使って,物体を動かしていた [16]. shapetweenは三角関数や弾性の動きを表現するのに有用であるため,AR飼育箱では物体の画像を切り取った後に画面上を跳ね回るような動きの表現に利用した.
30
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
5.2.2 観察結果
Make Tokyo Meeting 06では,AR飼育箱の内部を覗き込む人や,デイスプレイに映った物体の画像をタッチする人が多く見られた. 赤外線を用いた背景差分を行うことで,入れた物体がシルエットになって映り,それが面白いといった反応も得られた. 体験者の中には,デジタルカメラやカード等,体験者の所有物で試して欲しいと持ちかける人も見られ,
入れた物体の画像が画面上で動く様子を見て笑う様子が確認できた.
図 5.1: Make Tokyo Meeting 06での展示
5.3 公立はこだて未来大学オープンラボ
2010年 12月2日,公立はこだて未来大学にて展示を行った.
5.3.1 展示内容
当日,AR飼育箱は調整中であったため背景差分やドロネー三角形分割等一切の処理が行えなかったが,AR飼育箱本体を机に置き, 来場者に説明する形をとった.
5.3.2 観察結果
実演はできなかったが,展示に向けてAR飼育箱のこと (入れた物体が動き出す等)を書いたメールをあらかじめ送ったところ, 文面を見て楽しみにしてきたという人がいた. また,AR飼育箱の仕様を説明後,飼育箱という名前をつけるならば,餌をやる等物体との交流を行いたいという意見が得られた. Make Tokyo Meeting 06に続いて,インタラクションを求める意見だったため,飼育箱にちなんだインタラクションを考えることにした.
31
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 5.2: 公立はこだて未来大学オープンラボでの展示
5.4 2010年度公立はこだて未来大学情報デザインコース卒業研究
展示会
2011年 2月 11日から 13日にかけて,函館市地域交流まちづくりセンターにて行われた2010年度公立はこだて未来大学情報デザインコース卒業研究展示会で AR飼育箱を展示した.
5.4.1 展示内容
AR飼育箱を設置し,体験者にAR飼育箱へ物体を入れてもらい,入れた物体が動き出す様子に対する反応をうかがった. また,特に入れる物体を持ち合わせていない人のために,
動物の人形を数体用意しておいた. このとき展示した AR飼育箱は,入れられた物体の画像を背景差分法により切り抜き,切り抜いた画像にドロネー三角形分割を適用, ディスプレイに物体の動く様子を映し出した後,体験者はインタラクションを行えるというものであった.
5.4.2 観察結果
展示会来場者に AR飼育箱へ物体を入れてもらい,物体が動き出す様子の鑑賞とインタラクションの体験をしてもらった. AR飼育箱へ入れられた物体には,あらかじめ用意しておいた人形のほかに体験者の所有物として携帯電話, ライター,文房具,時計,鍵,キーホルダー,眼鏡といったものがあった. 用意されていた動物の人形を入れた体験者の中には,何を入れても動かすことが出来ると分かると,自分の物体も動かしたいと言い出す人も見られた.
体験者の反応としては,人形やキーホルダー等,その物体自体に既にキャラクター性があ
32
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
るものよりも, 矩形である携帯電話やライター,棒状のペン等の単純な形状の物体の方が良いと感じられた. 単純な形状の物体が動く様子については,原生生物のアメーバや昆虫のように見えて面白いという意見が得られた. 物体が中で本当に動いているのではないかと聞いてきた体験者に対しては AR飼育箱の扉を開け,中に置かれた物体とディスプレイを見比べてもらった. 中で物体が動いていないことが分かると,体験者は驚いた様子を見せたり仕組みを尋ねたりした.
また,展示会初日までは,物体の画面上での移動と箱を叩く動作は直結していた. 箱を叩かなければ物体が移動することはなく,箱が叩かれた分だけ物体は移動する. 体験者を観察していると, 箱を叩いて呼び寄せた際に,物体が表示画面の範囲 (Processingのウィンドウの表示範囲)外に飛び出してしまいどこにいるかわからなくなったり, ある程度呼び寄せた後に反対側から呼び寄せようとする際に今まで叩いた分の倍叩かなければならない,といったことがあった. そのため,2日目からは解決策として物体の位置のリセット機能を実装した. 物体が移動した後,しばらくの間箱が叩かれなければ,一番最初に居た場所に戻っていくという動作である. この機能の実装後,物体を呼び寄せては物体が元の位置に戻っていくという様子を眺める,といった動作を何度も繰り返す体験者や, わざと物体を画面外へ出し,物体が元の位置を目指して戻ってくる様子を楽しむ体験者を確認することができた.
その他の感想として,白黒ではない画像で楽しみたいといった声や,物体を複数個入れてみたい, さらに発展しそうな作品であるといった声が得られた.
図 5.3: 展示風景
33
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
第6章 結論
AR飼育箱の挙動と,それに対する評価実験の結果から本研究を考察する.
6.1 考察
展示した結果に対するAR飼育箱の反応から考察を行う.
展示会では,説明を受けずに AR飼育箱のディスプレイに表示された画像に触る人が多かったため,ただのディスプレイではなく,触れば何かが起こるのではないかと思わせる要素があると考えられる. 作品の概要を説明したときの反応や,入れた物体の画像が shapetween
によって単調に動くだけの様子を見ても「面白い」という人が複数居たことから, コンセプトである「動くはずのない物体が動き出す」というギャップは,ありえないことを起こす拡張現実感として有効であったと考えられる.
また,自分の所有物を入れたがる人が居たことも,物体が動く様子への興味ととれる. キャラクター性の強い物体とキャラクター性の無い物体について,それぞれが動いた様子に対する反応の差は, 実装していたアニメーションによるものだと考えられる. 展示会にて実装していた AR飼育箱の行うアニメーションは,ドロネー三角形分割後に得られた各三角形の頂点を狭い範囲でランダムに動かし, 全体を震わせるような動きであった. 三角形の頂点をランダムに動かすアニメーションでは,既にキャラクターとして成り立っている物体の画像と動きが合わず,不自然になってしまっていた. 逆に,入れられた物体の手足を動かしたり,走ったりするようなアニメーションが実装できれば,また異なった評価が得られると感じる. また,AR飼育箱に物体を入れ,箱を叩いて物体を呼び寄せたり,呼び寄せた物体を元の位置に戻したりする動作を繰り返した体験者からは, 飼い主が犬にボールを投げて取ってこさせるようなイメージが連想された. さらにペットを飼っているかのような表現として,餌や対話などの機能を追加することができると考えられる.
理想の完成形としての AR飼育箱は,入れられたあらゆる物体に対し赤外線の背景差分法で画像を切り抜き,射影変換によって色を合成できる. ドロネー三角形分割で四肢や関節が与えられた物体は動き出し,体験者の呼びかけに応じる. 体験者は自分が動かしたいと思った物体を AR飼育箱に入れるだけで,その物体と交流を図ることができる. 自分の手でAR飼育箱に入れた,自分の好きな物体が,まるで生きているかのように動く様子を見ることが出来るという点には, どんな物体でも動かすことができるという,入力と出力に自由度があるといえる. 最も,これらは全て理想の話であるので,現状では不可能な透明な物体に対しての背景差分や,未実装である射影変換, 少ないアニメーションパターンが課題となる. このことから,キャラクター性のある物体については手足等を自由に動かせればさらに面白い演出が出来ると考えられる
34
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
6.2 まとめ
入れた物体がまるで生き物のように動き出すという AR飼育箱を制作し,体験者から得た反応を基に考察を行った. AR飼育箱の体験者からは不思議である,面白いといった反応が得られたが,一方で未実装である射影変換やアニメーション機能についての言及もあった. 現在までの作品の評価から,入れた物体が動き出すという拡張現実感の表現が可能であると確認できた.
6.3 今後の方針
AR飼育箱を分析し,改良点を挙げる. 本体についての改良点として,外装の装飾と台の制作が考えられる. AR飼育箱は木箱をイメージし,材料にも木を使って制作したが,より飼育箱であると分かりやすいデザインを考える. また,今後の展示会へ向けて,AR飼育箱底部に開けられた穴から出されたケーブルを外部に見せずにコンピュータへと接続する台を制作する. 具体的には,AR飼育箱より一回り大きく,コンピュータが内蔵できるものであり,コンピュータとケーブルを隠すことで, 体験者に,「この中に入れたものが動き出す」と感じさせやすくするのが狙いである. AR飼育箱の動作について,射影変換とアニメーションの改良が考えられる. 現在は背景差分に赤外線を用いているため,ディスプレイでは白黒の画像しか写すことができない. 体験者が AR飼育箱に入れた物体と,ディスプレイに表示された物体とが同じものであることを明確にするため, 射影変換を実装し,入れた物体そのままの色でディスプレイに表示されるようにする. また,表示された動く物体が手を振ったり,跳ねたりするような,より生きているように見える動きを模索する.
35
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
謝辞
本研究を進めるにあたり,ご指導をいただいた迎山和司先生 (公立はこだて未来大学システム情報科学部情報アーキテクチャ学科准教授) に深く感謝致します.AR飼育箱本体の設計では朝倉俊雄さん (公立はこだて未来大学職員) に助言を頂いたことを,感謝致します.迎山研究室の朝倉貴大さん,板垣大人さん,上田諒さん,七條新さん,菅原雅仁さん (五十音順)には貴重な意見や提案を頂き,感謝致します. また,各種展示会においてAR飼育箱を体験し感想を頂いた方々に感謝致します.
36
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
参考文献
[1] 頓智ドット株式会社. Sekai Camera Web. http://sekaicamera.com/
[2] ソフトバンクモバイル株式会社. softbank. http://mb.softbank.jp/mb/
[3] Wolfgang Hohl. Interactive Environments with Open-Source Software 3D Walk-
throughs and Augumented Reality for Architects with Blender 2.43, DART 3.0 and
ARToolKit 2.72 pp.22. SpringerWienNewYork.
[4] Takeo Igarashi, Tomer Moscovich, John F. Hughes. ”As-Rigid-As-Possible Shape
Manipulation”. ACM Transactions on Computer Graphics, 2005.
[5] 青木孝文, 市川宙,浅野一行,飯尾裕一郎,三武裕玄,鮎川力也, 川瀬利弘,栗山貴嗣,松村周,遠山喬,松下卓史,長谷川晶,佐藤誠. 実世界で存在感を持つバーチャルクリーチャの実現 Kobito -Virtual Brownies-. 東京工業大学ロボット技術研究会,東京工業大学精密工学研究所,科学技術振興機構さきがけ研究員, 2006.
[6] Takafumi Aoki. Hironori Mitake. Shoichi Hasegawa, Makoto Sato. Haptic Ring:
Touching Virtual Creatures in Mixed Reality Environments. P & I lab. Tokyo In-
stitute of Technology, University of Electro-Communications, 2009.
[7] 小林茂. Prototyping Lab. O’REILLY, 2010.
[8] Casey Reas,Benjamin Fry. Processing.org. http://processing.org/
[9] 井上誠喜,八木伸行,林正樹,中須英輔,三谷公二,奥井誠人. C言語で学ぶ実践画像処理 pp.140-141. オーム社,2008.
[10] 小林貴訓, 小池 英樹, 佐藤 洋一赤外線画像を用いた指先実時間追跡による Enhanced
Deskの実現 p.3. 1999.
[11] Noe”l DANJOU. Noe”l’s Home Page. http://noeld.com/
[12] 井上誠喜,八木伸行、林正樹,中須英輔,三谷公二,奥井誠人. C言語で学ぶ実践画像処理 pp.148-157. オーム社,2008.
[13] SHEWCHUK, J.R. Triangle: Engineering a 2D Quality Mesh Generator and De-
launay Triangulator, 1996.
[14] 谷口健男. FEMのための要素自動分割 デローニー三角分割法の利用. 森北出版株式会社, 1992.
37
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
[15] Jim Ruppert. A Delaunay Re nement Algorithm for Quality 2-Dimensional Mesh
Generation,1995.
[16] Lee Byron. Animation & Shaping. http://www.leebyron.com/else/shapetween/
[17] Zhiyuan Zhao,Alan Saalfeld. The Delaunay Applet. http://people.bath.ac.uk/
enscjb/voronoi/tri.html
[18] Takeo Igarashi, Satoshi Matsuoka, Hidehiko Tanaka. Teddy: A Sketching Interface
for 3D Freeform Design, University of Tokyo, Tokyo Institute of Technology, 1999.
38
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
図 目 次
1.1 iphone[2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 セカイカメラ [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 ARToolKitを使用した拡張現実感 [3] . . . . . . . . . . . . . . . . . . . . . 2
2.1 物体の堅さを表現した 2次元形状の操作手法 [4] . . . . . . . . . . . . . . . 3
2.2 Kobito -Virtual Brownies-[5] . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Haptic Ring[6] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.1 AR飼育箱接続図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2 AR飼育箱本体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.3 断面図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.4 USBカメラを設置した様子 . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.5 赤外線発光ダイオードを用いた照明 . . . . . . . . . . . . . . . . . . . . . . 8
3.6 赤外線照明 裏 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.7 AR飼育箱の蓋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.8 AR飼育箱の蓋 (裏) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.9 圧電スピーカー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.10 Gainer mini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.11 AR飼育箱底 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.12 左:通常の背景差分法 右:赤外線を用いた背景差分 . . . . . . . . . . . . 12
3.13 箱を叩くインタラクション (仮図) . . . . . . . . . . . . . . . . . . . . . . . 13
4.1 ドロネー三角形分割 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.2 基本的な動作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.3 3点を挿入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.4 向きの決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.5 直線の決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.6 向きの決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.7 凸包 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.8 凸包の頂点の追加 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.9 逆ノード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.10 挿入点に近い三角形を用いる . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.11 辺の左右と点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.12 三角形内部の挿入点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.13 外接円 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
39
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI

Making of Augmented Reality Cage
4.14 スワッピング . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.15 辺上への挿入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.16 ドロネー三角形分割とテクスチャ . . . . . . . . . . . . . . . . . . . . . . . 24
4.17 テクスチャのはみ出し . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.18 点を挿入する範囲を拡大 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.19 欠損のカバー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.20 不要な部分まで生成されたドロネー三角形分割 . . . . . . . . . . . . . . . . 26
4.21 三角形と点の包含関係 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.22 必要な三角形を判別したドロネー三角形分割 . . . . . . . . . . . . . . . . . 28
4.23 3種類の三角形の区別 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.24 グループ化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.25 三角形を動かしてアニメーションを行う . . . . . . . . . . . . . . . . . . . 29
5.1 Make Tokyo Meeting 06での展示 . . . . . . . . . . . . . . . . . . . . . . . 31
5.2 公立はこだて未来大学オープンラボでの展示 . . . . . . . . . . . . . . . . . 32
5.3 展示風景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
40
BA Thesis at Future University Hakodate, 2011 Kazuma NEGISHI