matriČna analizana analiza konstrukcija fileei -6l 4l 6l 2l l -12 6l 12 6l 6l 2l 6l 4l sy k 5 9...
TRANSCRIPT
MATRIČNA ANALIZAMATRIČNA ANALIZA KONSTRUKCIJA
PROSTORNI NOSAČI
Prof. Mira PetronijevićProf. Mira Petronijević
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 1
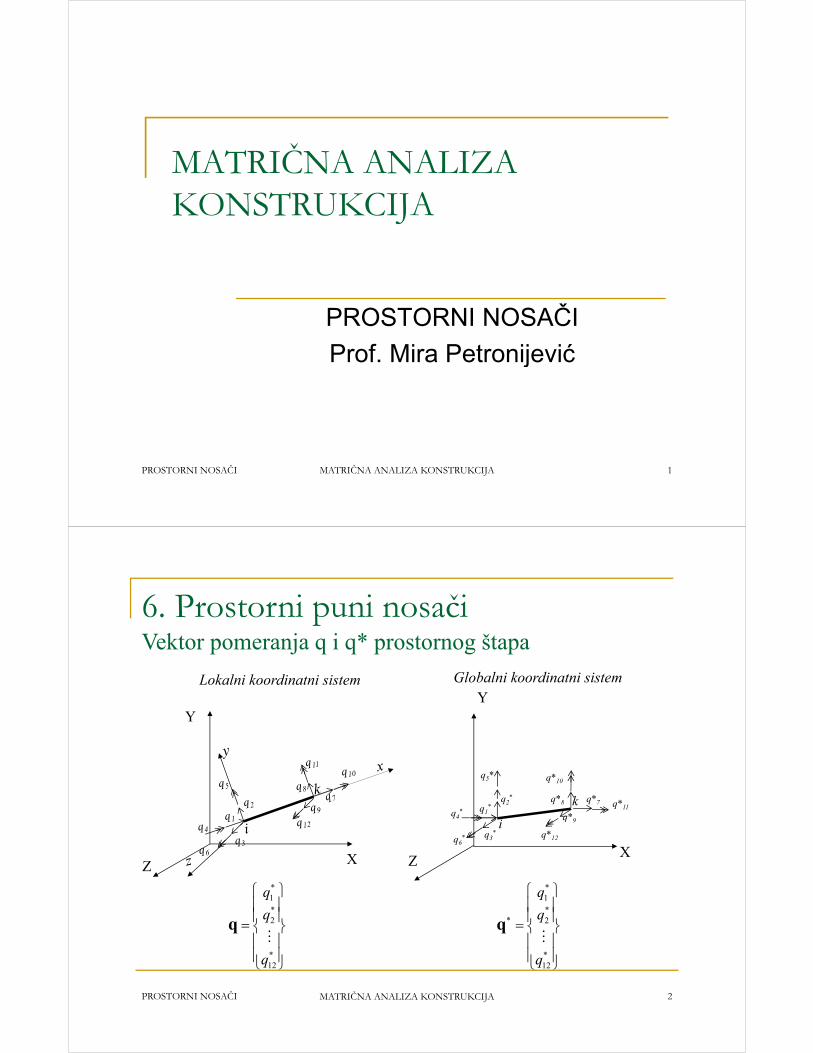
6. Prostorni puni nosači Vektor pomeranja q i q* prostornog štapa
Lokalni koordinatni sistem Globalni koordinatni sistemY
Y
q4* q1
*
q5*
q2*
q*10
q*8 q*7k q*11
q*9i
*
Xq3
*q6
* q*12
Z
q 9i
*
XZ*1*2
q
q
q
*1*
* 2
q
q
q
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 2
*12q
*12q
6.1 Matrica krutosti štapaVektori sila i pomeranja u lokalnom koordinatnom sistemu:
1
2
RR
R
1
2
q
Vektori sila i pomeranja u globalnom koordinatnom sistemu:
12R
12
q
Vektori sila i pomeranja u globalnom koordinatnom sistemu:
*
1
*
RR
*
1
*
*
q
q
* 2
*
R
R
R
2
*
q
q
q
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 3
12R 12q
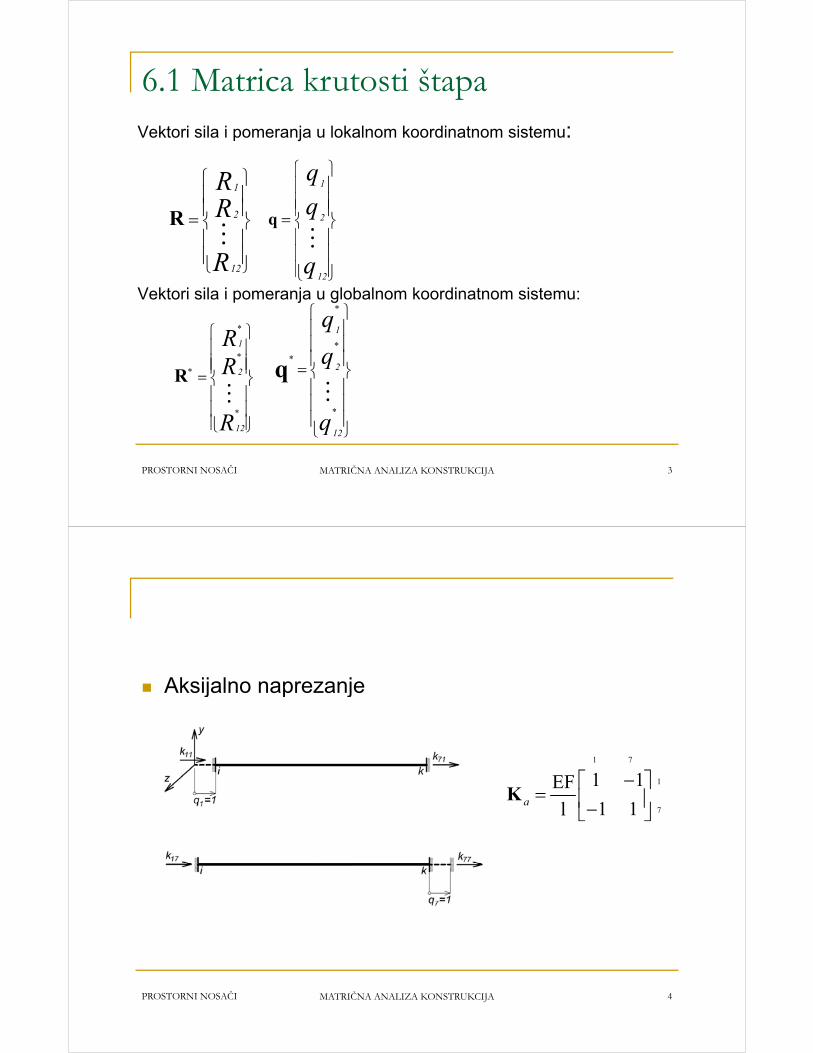
Aksijalno naprezanjeAksijalno naprezanje
1 7
1 1EF
1 1la
K
1 7
1
7
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 4
Torzija Torzija
1 1GJ
1 1lt
K
4 10
4
10
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 5
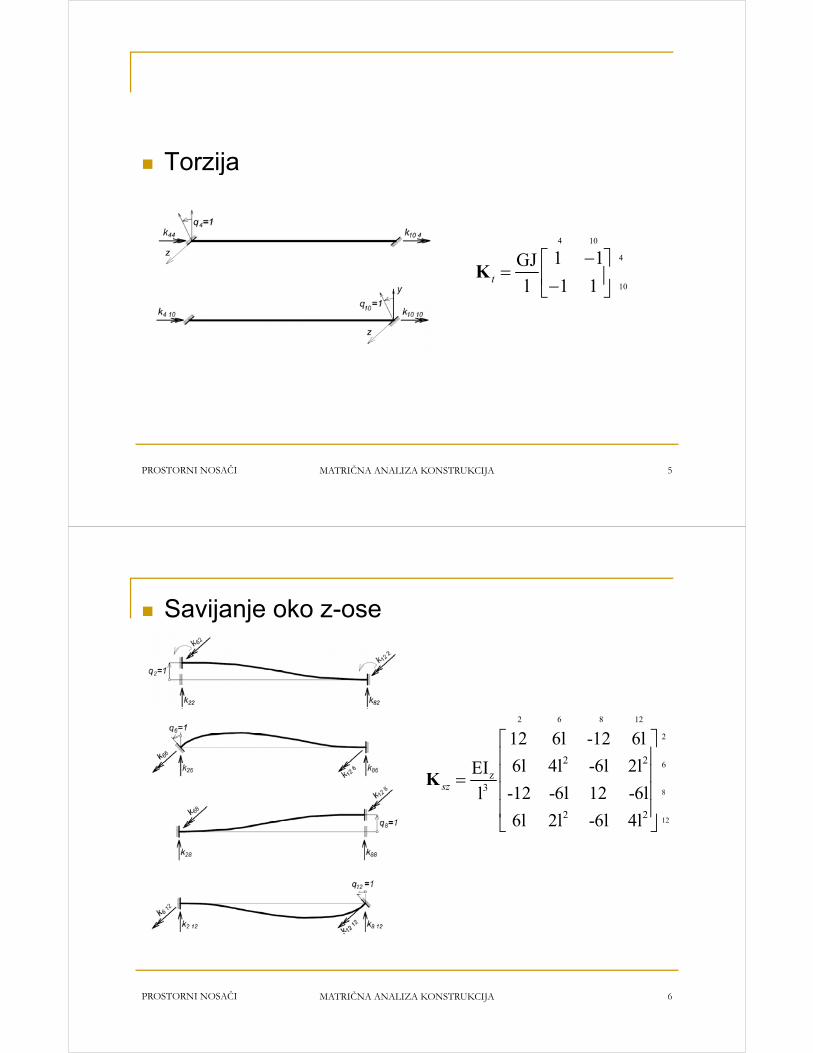
Savijanje oko z-ose
2 2
12 6l -12 6l
2 6 8 12
2
2 2
z3
2 2
6l 4l -6l 2lEI
-12 -6l 12 -6ll
6l 2l 6l 4l
sz
K6
8
126l 2l -6l 4l 12
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 6
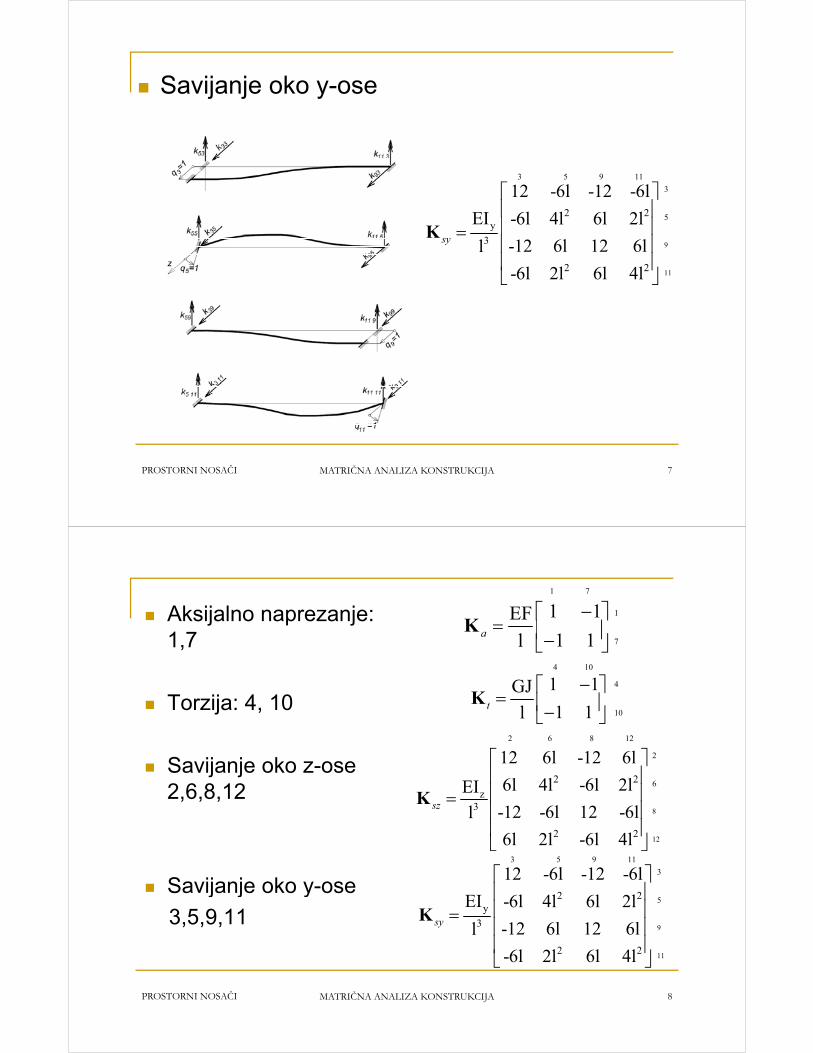
Savijanje oko y-ose
2 2y
12 -6l -12 -6l
EI -6l 4l 6l 2l
K
3 5 9 11
3
5y
3
2 2
-12 6l 12 6ll
-6l 2l 6l 4l
sy
K9
11
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 7
Aksijalno naprezanje: 1 1EF K
1 7
1
1,7 1 1la K
7
1 1GJ K
4 10
4
Torzija: 4, 10
S
GJ
1 1lt
K10
12 6l 12 6l 2 6 8 12
2
Savijanje oko z-ose 2,6,8,12
2 2
z3
12 6l -12 6l
6l 4l -6l 2lEI
-12 -6l 12 -6llsz
K
2
6
8
Savijanje oko y ose
2 26l 2l -6l 4l 12
12 -6l -12 -6l
3 5 9 11
3
Savijanje oko y-ose
3,5,9,112 2
y
3
2 2
EI -6l 4l 6l 2l
-12 6l 12 6ll
6l 2l 6l 4l
sy
K5
9
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 8
2 2-6l 2l 6l 4l 11
0 0 0 0 0 0 0 0 0 0
6 612 12
EF EF
l lEI EIEI EI
1 2 3 4 5 6 7 8 9 10 11 12
1
3 2 3 2
3 2 3 2
6 612 120 0 0 0 0 0 0 0
6 612 120 0 0 0 0 0 0 0
z zz z
y y y y
EI EIEI EI
l l l lEI EIEI EI
l l l lGJ GJ
2
3
2 2
0 0 0 0 0 0 0 0 0 0
6 64 20 0 0 0 0 0 0 0
6 64 2
y y y y
GJ GJ
l lEI EIEI EI
l ll lEI EIEI EI
4
5
2 2
6 64 20 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
120 0 0 0
z zz z
z
EI EIEI EI
l ll lEF EF
l lEI
K
6 6120 0 0 0zz zEI EIEI
6
7
30 0 0 0z
l
2 3 2
3 2 3 2
0 0 0 0
6 612 120 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
zz z
y y y y
l l lEI EIEI EI
l l l lGJ GJ
8
9
10
2 2
0 0 0 0 0 0 0 0 0 0
6 62 40 0 0 0 0 0 0 0
6 62 40 0 0 0 0 0 0 0
y y y y
z zz z
l lEI EIEI EI
l ll lEI EIEI EI
10
11
12
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 9
2 20 0 0 0 0 0 0 0
l ll l
12
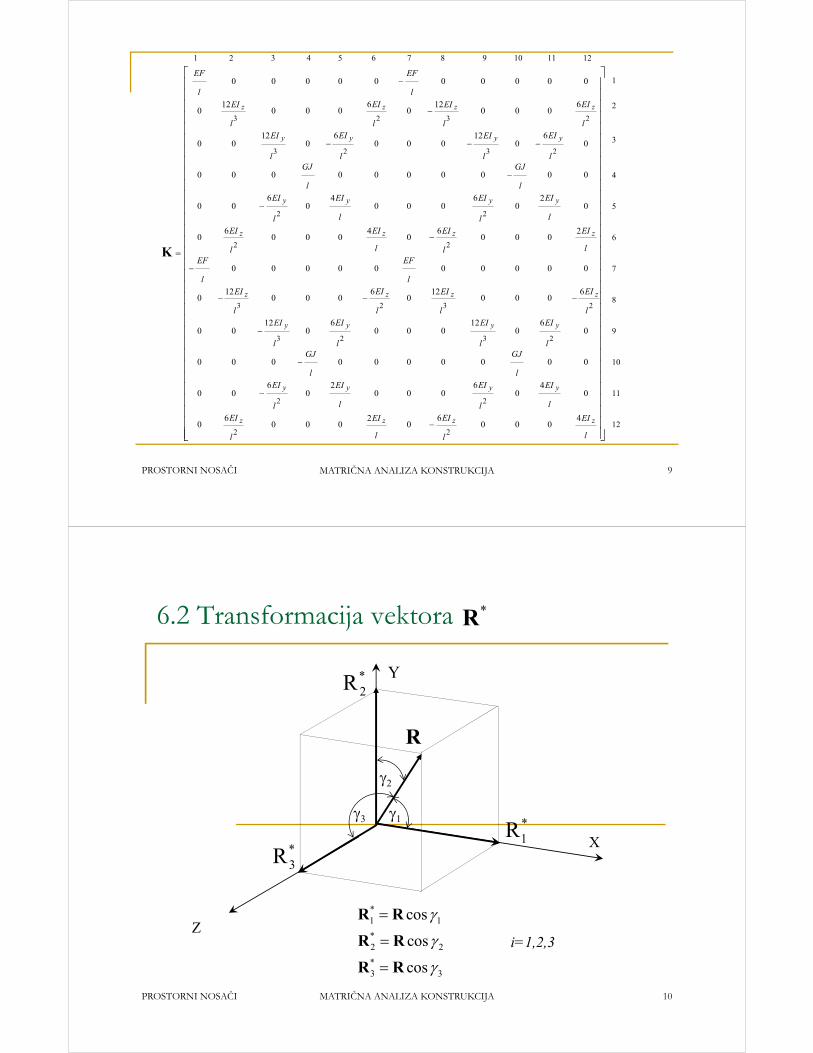
6.2 Transformacija vektora *Rj
Y*2R
R
2
1
2
3 *
X
13 *1R
*3R
Z*1 1
*2 2
cos
cos
R R
R R i=1,2,3
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 10
*3 3cosR R
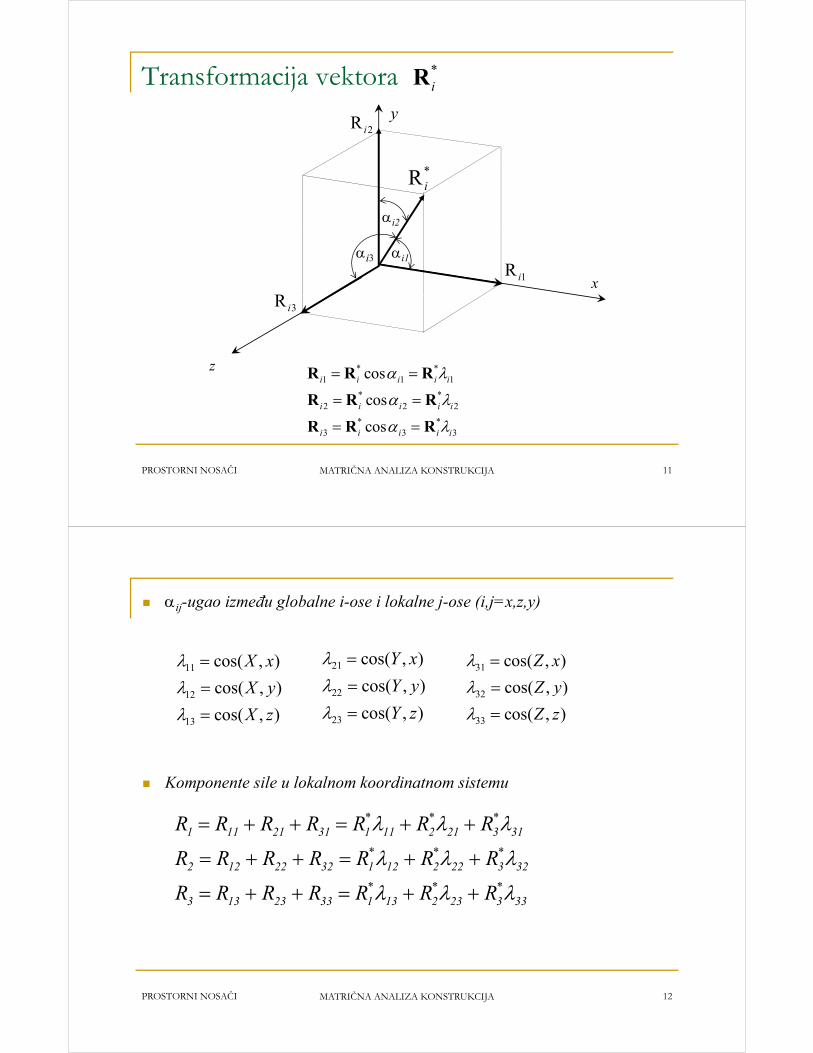
Transformacija vektora *iR
*
y2R i
*R i
i2
x
i1i3
R
1R i
3R i
z * *1 1 1
* *2 2 2
* *
cos
cos
cos
i i i i i
i i i i i
R R R
R R R
R R R
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 11
3 3 3cosi i i i i R R R
ij-ugao između globalne i-ose i lokalne j-ose (i,j=x,z,y)
31
32
cos( , )
cos( , )
Z x
Z y
11
12
cos( , )
cos( , )
X x
X y
21
22
cos( , )
cos( , )
Y x
Y y
32
33
cos( , )
cos( , )
Z y
Z z
12
13
cos( , )
cos( , )
X y
X z
22
23
( , )
cos( , )
y
Y z
Komponente sile u lokalnom koordinatnom sistemu
* * *R R R R R R R 1 11 21 31 1 11 2 21 3 31
* * *2 12 22 32 1 12 2 22 3 32
* * *
R R R R R R R
R R R R R R R
R R R R R R R
* * *
3 13 23 33 1 13 2 23 3 33R R R R R R R
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 12
*1 11 12 13 1
*
R R
R R2 21 22 23 2*
3 31 32 33 3
* - vektor sila u čvoru is is i
R R
R R
R λ R*
*
*
- vektor momenata u čvoru
-
im im
is is
i
R λ R
R λ R
R λ R vektor generalisanih sila u čvoru i
im im
R λ R* *, i i k k
R t R R t R
λ
*
*, matrica transformacije i i
tλ
R t tRT
R t t*, j
Problem je odrediti !!
k k
ij
R t tR
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 13
ij
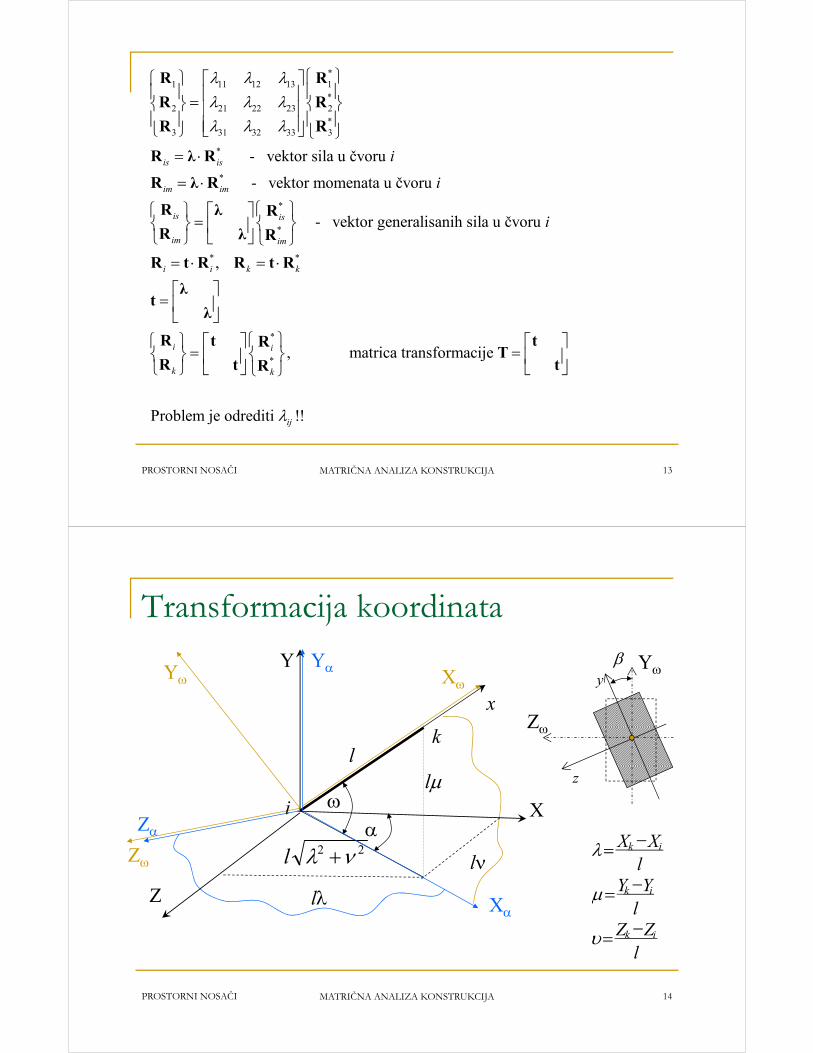
Transformacija koordinata
yYY
XY
Y
Z
x
kl
z
Z
lXi
l
Z
Z22 l
lYY
lXX ik
XZ l
lZZ
lYY
ik
ik
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 14
l
Određivanje uglova i - koordinate tačaka i i k , , , , ,i i i k k kX Y Z X Y Z
22sin
22
cos
YYl
XX ik
22cos ZZl
YY
ik
ik
sinl
2 2 2
k i k i k il X X Y Y Z Z - dužina štapa ik k i k i k il
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 15
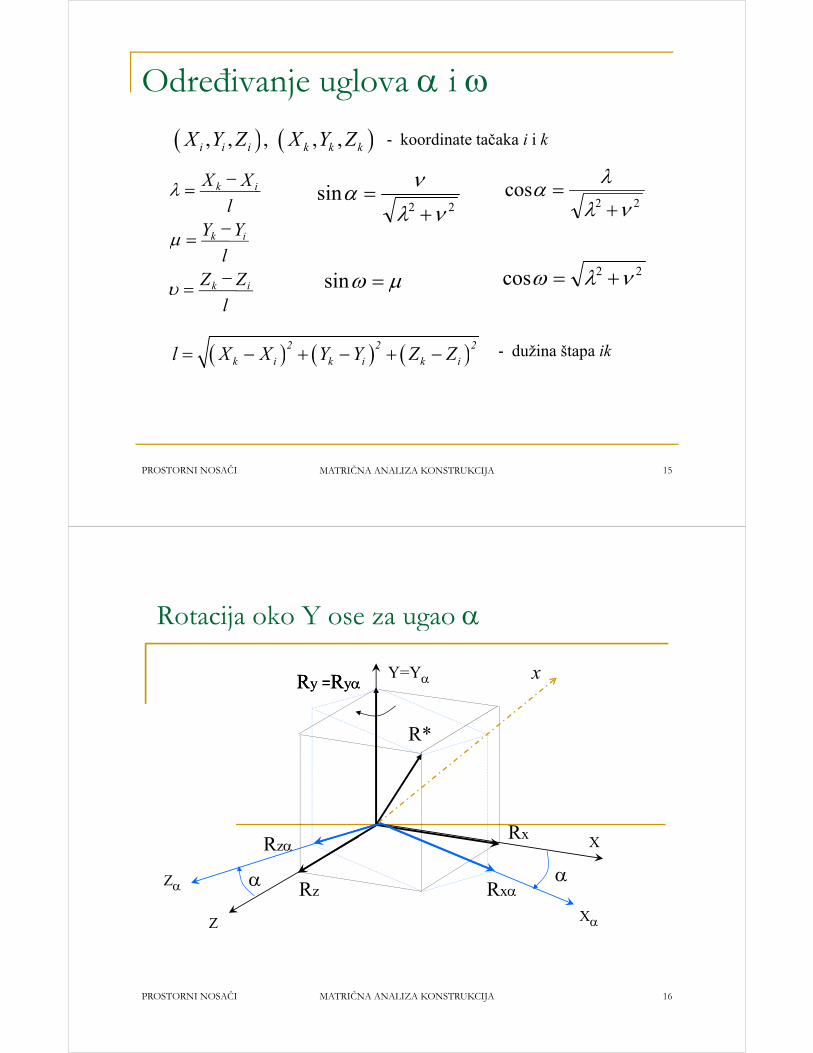
Rotacija oko Y ose za ugao j g
Ry =RyY=YRy =Ry
x
R*
RZ
XRx
R
Rz
Z
Rx
X
Rz
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 16
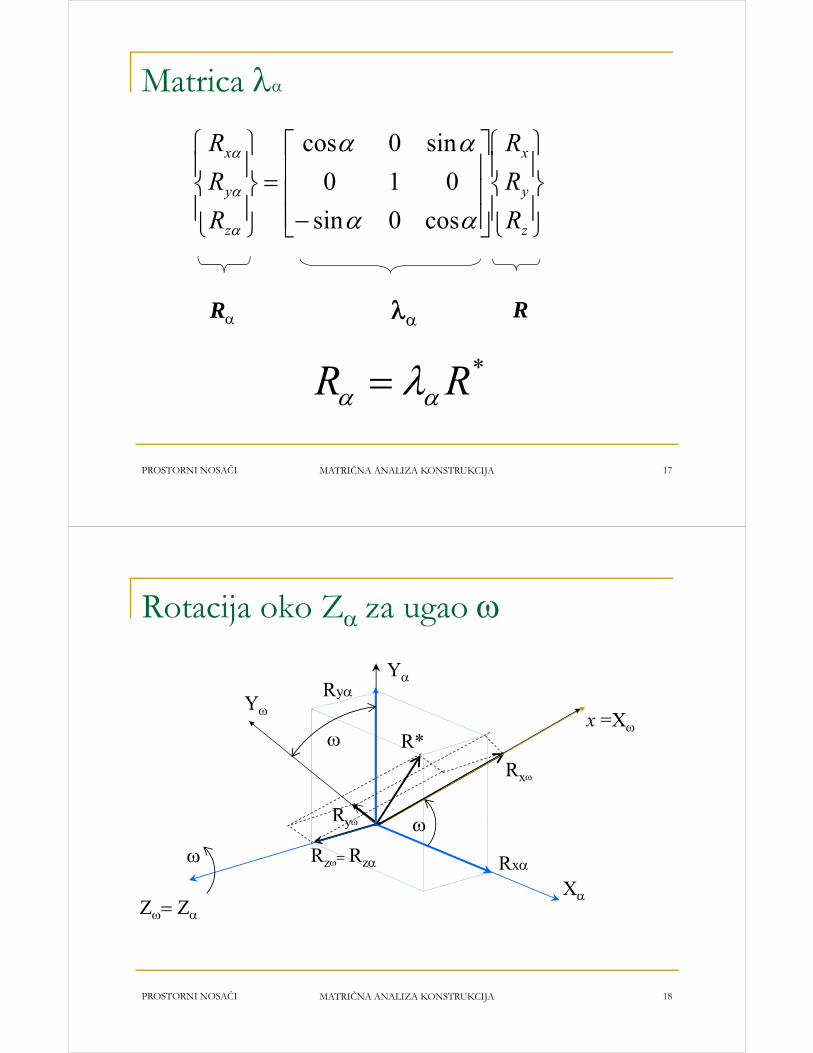
Matrica
xx RR sin0cos
z
y
z
y
R
R
R
R
cos0sin
010
zz
*
R R
*RR
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 17
Rotacija oko Z za ugao
YRy
x =X
Y
R*
Ry
Rx
Ry
X
y
RzRz Rx
Z
X
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 18
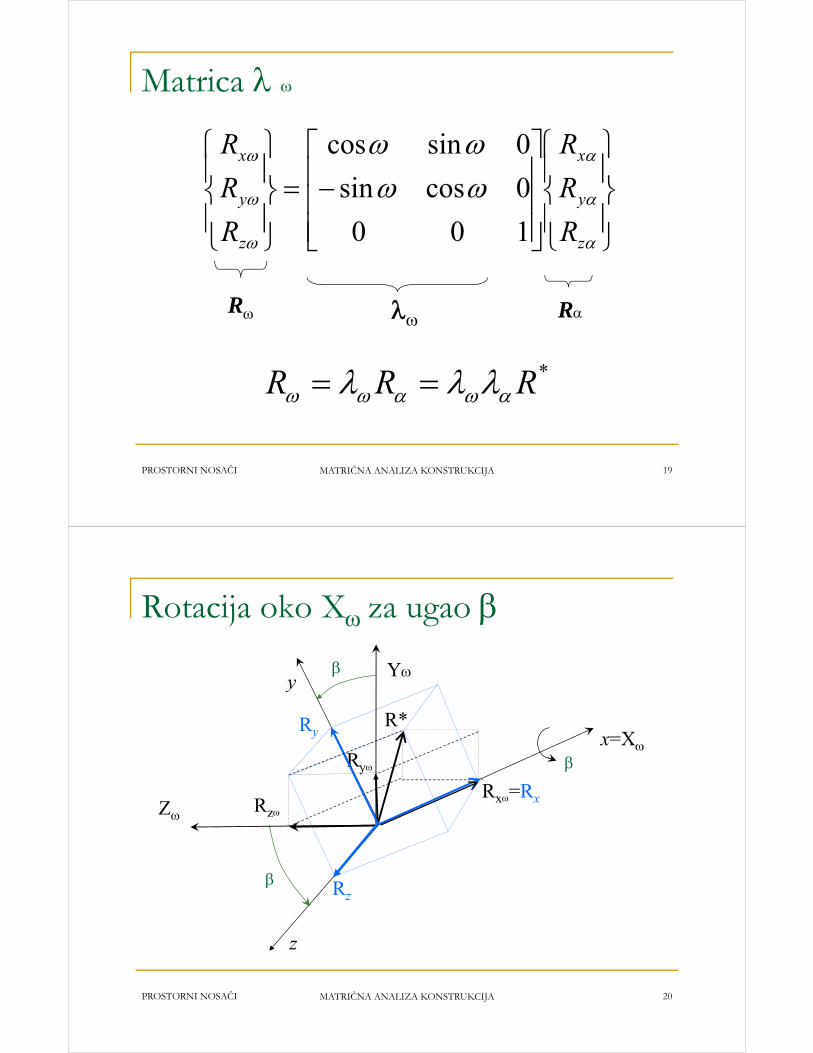
Matrica
xx RR 0sincos
yy
R
R
R
R
100
0cossin
zz RR 100
R R
*RRR
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 19
Rotacija oko X za ugao
y
Y
x=X
y
R*
R
Ry
Rx=Rx
Ry
Rz
R Rz
z
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 20
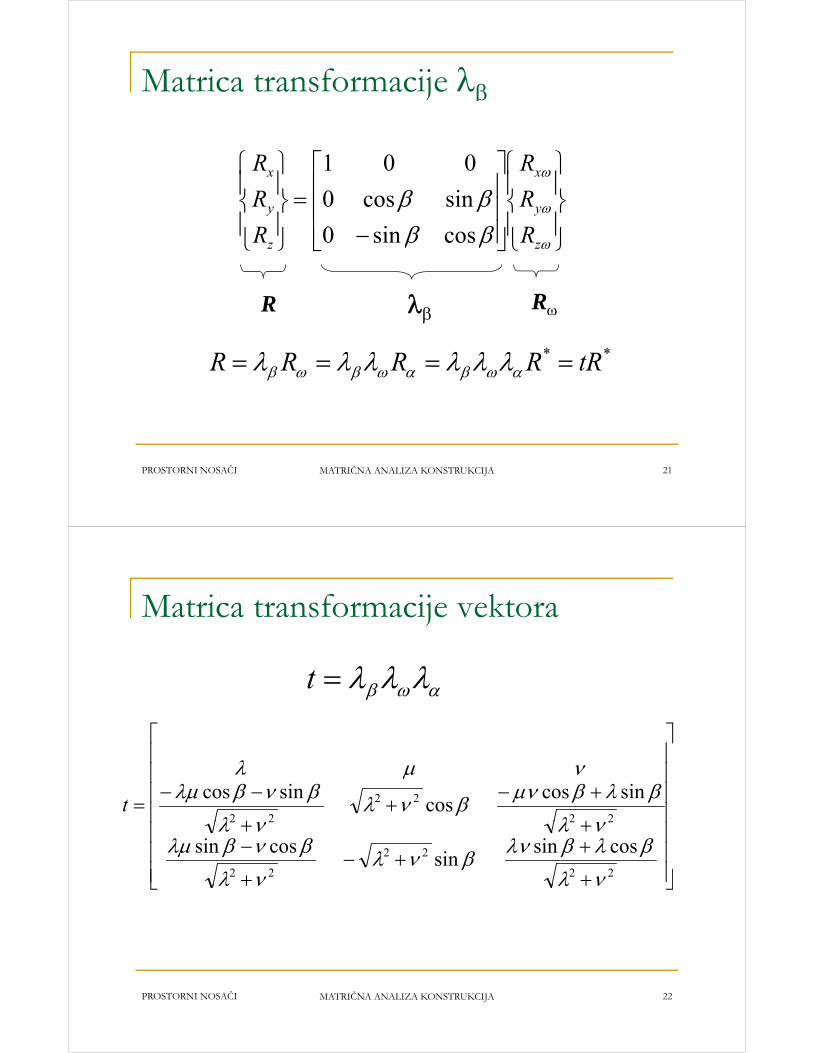
Matrica transformacije
RR 001
y
x
y
x
R
R
R
R
R
R
i0
sincos0
001
zz RR cossin0
R
** tRRRRR
R R
tRRRRR
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 21
Matrica transformacije vektora
t
22
22
22
sincoscos
sincos
t
22
22
22
2222
cossinsin
cossin
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 22
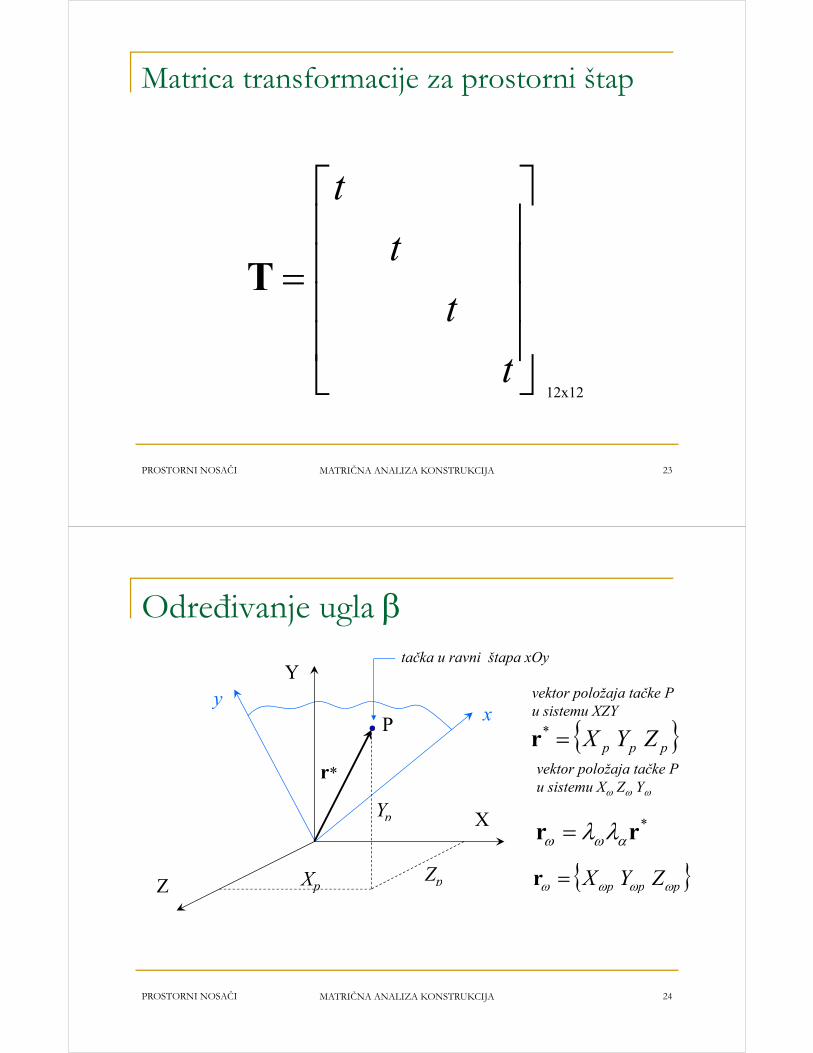
Matrica transformacije za prostorni štap
t
t
T
t
t
t
12x12
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 23
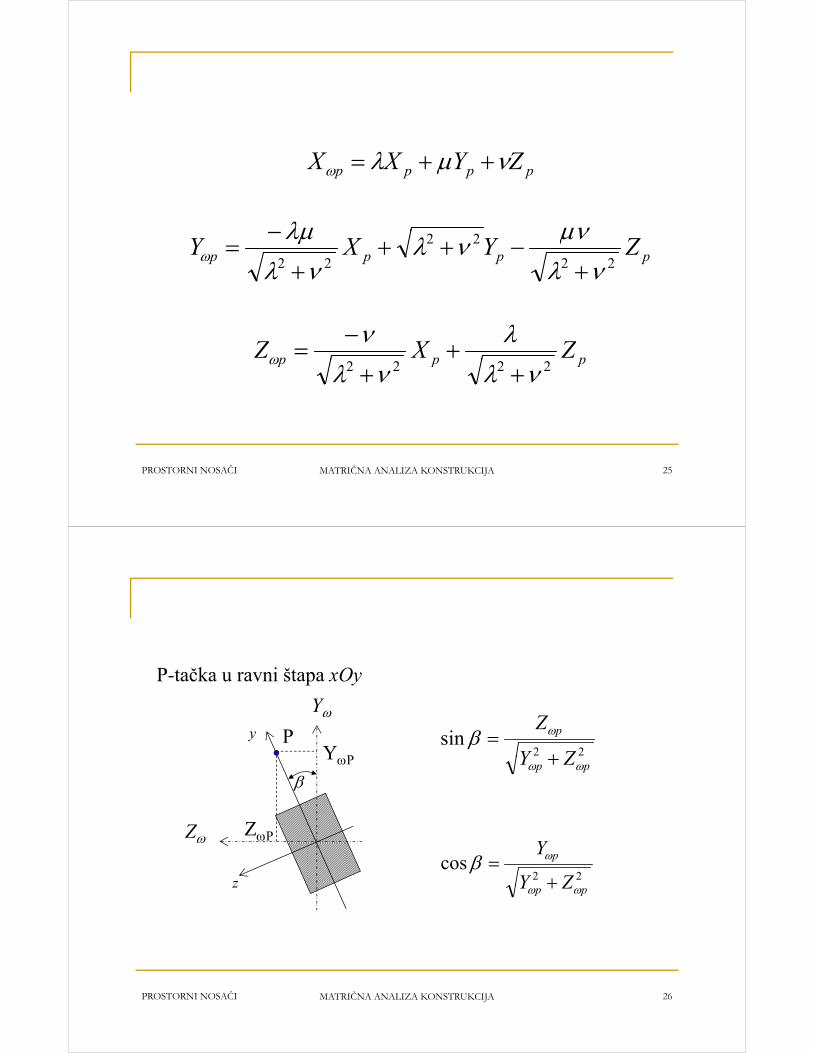
Određivanje ugla
Ytačka u ravni štapa xOy
vektor položaja tačke P
P xy vektor položaja tačke P
u sistemu XZY
ppp ZYX * r
*
r*
XYp
vektor položaja tačke Pu sistemu X Z Y
ppp ZYX r
*rr
Z
X
XpZp ppp Z p
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 24
ZYXX pppp ZYXX
pppp ZYXY22
22
22
ppp ZXZ
ppp 2222
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 25
P-tačka u ravni štapa xOy
22sin p
ZY
Z
y
Y P
P
Y
pp ZY
YP
22cos p
ZY
Y
ZP
z
Z
pp ZY z
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 26
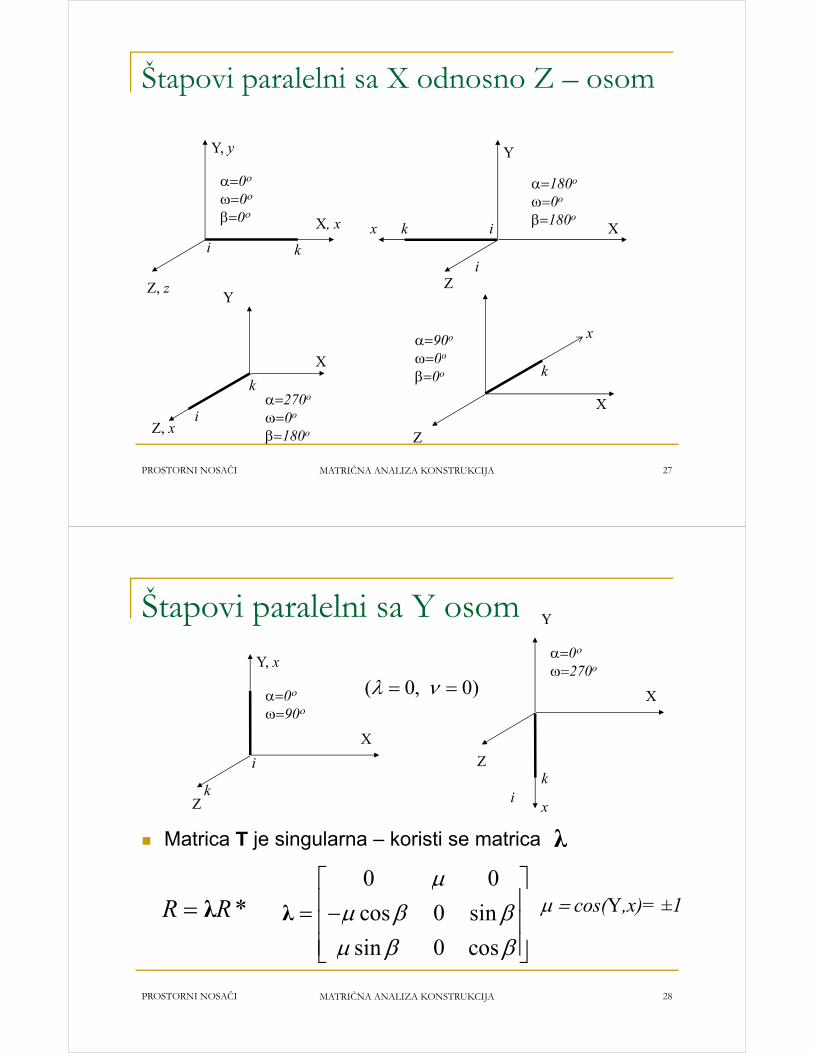
Štapovi paralelni sa X odnosno Z – osom
Y, y Y
X, x
0
0
0Xx
180o
0o
180ok i
Z, z
i ki
Y
X
Z
x k i
90o
0o
x
Y
X 00o
X
k
i
k
X
Z
270o
0o
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 27
ZZ, x 180o
Štapovi paralelni sa Y osom Y
( 0, 0) Y, x
0 X
0
270o
( 0, 0)
X
0
90X
Z
Z
i
k
Zk
xi
Matrica T je singularna – koristi se matrica
0 0
λ
*R R λ cos 0 sin
sin 0 cos
λ cos(Y,x)= ±1
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 28
sin 0 cos
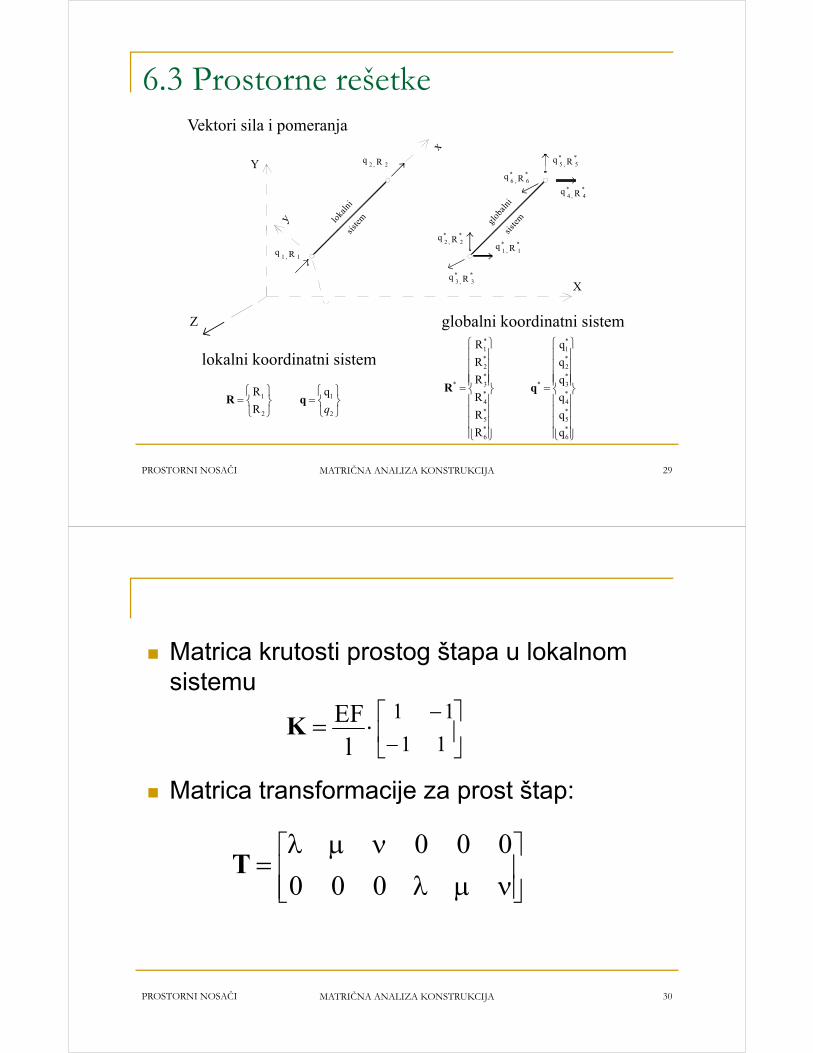
6.3 Prostorne rešetke
Y q R,2 2*q R
*,5 5
x
Vektori sila i pomeranja
Y
y loka
lni
siste
m
,2 2
glob
alni
siste
m
q *6 , 6
*R
*q4 ,
,5
*4R
5
q,1 1R
si
*q *R
2 , R 2
,q *
3*
R 3
,1 1
*q * si
X
Z* *1 1* *
R q
R
globalni koordinatni sistem
lokalni koordinatni sistem2 2* *
* *3 3* *4 4* *5 5
R q
R q
R q
R q
R q
lokalni koordinatni sistem
1 1
2 2
R q
R q
R q
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 29
* *6 6R q
Matrica krutosti prostog štapa u lokalnom sistemu
11
11
lEFK
Matrica transformacije za prost štap:
000
000T
000
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 30

gde je:
l
XXx,Xcos ik l
ZZx,Zcos ik
l
YYx,Ycos ik l
l 222 ZZYYXXl ik2
ik2
ik2
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 31
Matrice krutosti
EF EFˆl
K K T
* T EF
le e
e e
K K
K K
K T Ke e
2 2
2eK
PROSTORNI NOSAČI MATRIČNA ANALIZA KONSTRUKCIJA 32