modellazione di un ponte misto acciaio cls … · figura 8_sezione trasversale del caso studio...
TRANSCRIPT

FACOLTA’ DI INGEGNERIA CIVILE
Corso di Laurea Magistrale in Ingegneria Civile per la Protezione
dai Rischi Naturali (D.M.270)
RELAZIONE DI FINE TIROCINIO
A.A. 2016/2017
MODELLAZIONE DI UN PONTE MISTO
ACCIAIO – CLS TRAMITE IL SOFTWARE
OPENSEES
TUTOR UNIVERSITARIO STUDENTE
Prof. Ing. Paolacci Fabrizio Cristofari Marco
Matricola:450430

2
Indice
1. Introduzione .......................................................................................................................... 3
2. Aspetti generali del software Opensees ................................................................................ 4
3. Il caso studio.......................................................................................................................... 6
3.1 I ponti misti acciaio-calcestruzzo .......................................................................................... 6
3.2 Descrizione del caso studio ................................................................................................... 8
3.2.1 Materiali ....................................................................................................................... 10
3.2.2 Carichi .......................................................................................................................... 11
3.2.3 Fasi costruttive ............................................................................................................. 11
3.2.4 Particolare della connessione ....................................................................................... 12
4. Descrizione del modello numerico ...................................................................................... 14
4.1 Definizione modello base .................................................................................................... 14
4.2 Definizione dei nodi ............................................................................................................ 15
4.3 Condizioni al contorno ........................................................................................................ 19
4.4 Modellazione soletta ........................................................................................................... 21
4.5 Modellazione trave .............................................................................................................. 27
4.6 Modellazione pioli trave-soletta .......................................................................................... 31
4.7 Modellazione Concrete Cross Beam ................................................................................... 34
4.7.1 Dettaglio modellazione CCB ....................................................................................... 37
4.8 Modellazione pila ................................................................................................................ 41
5. Analisi statica non lineare ................................................................................................... 46
5.1 Definizione e applicazione dei carichi ................................................................................ 46
5.2 Implementazione dell’analisi in ambiente OpenSees.......................................................... 48
5.3 Registrazione dei risultati .................................................................................................... 51
5.4 Elaborazione dei dati di output............................................................................................ 56

3
1. Introduzione
Il seguente elaborato ha l’obiettivo di descrivere quanto svolto durante l’attività di tirocinio
tenutasi nel dipartimento di Ingegneria Civile dell’Università di Roma 3 (Via Vito Volterra, 62).
Tale attività consiste nel definire un modello di un ponte misto acciaio-calcestruzzo di due
campate che possa rappresentare fedelmente la risposta della struttura soggetta a carichi statici
(carichi strutturali e non strutturali) e dinamici (azione sismica).
La procedura descritta verrà eseguita mediante il software Opensees, (“Open System for
Earthquake Engineering Simulation”) un ambiente di programmazione aperto che consente di
modellare e simulare in maniera accurata e affidabile la risposta di sistemi strutturali e geotecnici
soggetti ad azioni di vario tipo, fra cui il sisma.
Nella prima parte dell’elaborato, introdotti gli aspetti generali del software, si presentano le
principali caratteristiche del ponte, a cui segue un’approfondita descrizione della modellazione di
ogni componente di questo. Infine, si presentano i risultati ottenuti al seguito di un’analisi statica
non lineare operata sul modello stesso mediante il software.

4
2. Aspetti generali del software Opensees
Sempre più evidente è l’importanza e la necessità di software di modellazione e simulazione di
sistemi al fine di comprendere il comportamento di quest’ultimi soggetti in particolar modo ad
azioni dinamiche, quali, ad esempio, i terremoti.
Con il supporto della National Science Foundation, il Pacific Earthquake Engineering Research
Center (PEER), ha sviluppato a partire dagli anni ’90, l’Open System for Earthquake Engineering
Simulation (Sistema aperto per simulazione nell’ingegneria sismica), in breve Opensees.
Questo è un programma agli elementi finiti impiegato nell’ambito dell’ingegneria sismica per la
simulazione della risposta non lineare di sistemi strutturali e geotecnici.
La struttura del programma è definita da una serie di “classi” (moduli) gerarchiche e tra loro
correlate: modello, elementi, materiali definenti l’elemento, metodi di analisi, solutori numerici
ecc… L’indipendenza delle varie classi consente di ottenere un’elevata flessibilità nel combinare
i diversi moduli al fine di risolvere i problemi di simulazione e modellazione di differenti strutture
(edifici, ponti…).
La caratteristica di essere un software di tipo “open-source”, ovvero “aperto”, permette allo stesso
di essere in continua evoluzione grazie al contatto e l’interscambiabilità tra utenti e sviluppatori.
Infatti, fino ad oggi, moltissimi ricercatori, da ogni parte del mondo, hanno contribuito ad
arricchire questo programma con componenti che permettono di svolgere elaborate simulazioni
della risposta di strutture e di sistemi geotecnici.
Tale caratteristica e la struttura del software offrono molti vantaggi agli utenti:
- L’approccio alla modellazione è molto flessibile. Permette, infatti di selezionare e combinare
tra loro differenti elementi di diversi materiali;
- Esistono una vasta gamma di procedure e solutori numerici che l’utente può adattare per
risolvere difficili problemi non lineari per carichi sia statici che dinamici.
Opensees utilizza il linguaggio C++. Esso, però, è privo di ogni interfaccia grafica di input e
output:
• Input: L’input dei dati (geometrie, condizioni al contorno, parametri meccanici, azioni
esterne e strategie di risoluzione) è definito tramite un file scritto in linguaggio TCL;
• Output: L’output dei risultati consiste in semplici file di testo che riportano i risultati
dell’analisi strutturale privi di qualsiasi post-porcessor che li renda immediatamente
utilizzabili per il progetto o la verifica delle strutture.

5
Questi all’interno presentano solo valori numerici che devono essere elaborati mediante
altri programmi. In tale elaborato si è utilizzato il software Matlab.
Figura 1_Esempio: Input dati Opensees
Figura 3_Esempio: contenuto dei file in Output.
Sono disponibile tuttavia programmi ad hoc, quali per esempio Opensees Post Processor (OPS),
che permettono all’utente di visualizzare il modello realizzato.
Figura 2_Esempio: dati Output Opensees.
6
3. Il caso studio
Il presente capitolo presenta una rapida panoramica dei ponti misti acciaio-calcestruzzo
caratterizzati da un’innovativa tipologia di connessione definita Concrete Cross Beam. Segue, poi,
una descrizione del ponte oggetto di studio.
3.1 I ponti misti acciaio-calcestruzzo
Negli ultimi anni si è potuto osservare un consistente incremento nella costruzione di ponti misti
acciaio-calcestruzzo con campate di media lunghezza (range tra i 25-40 m) e travi a I laminate a
caldo: questo trova le sue motivazioni in una maggior rigidità e resistenza, ottenute con un peso
complessivamente ridotto unitamente ad un uso importante della prefabbricazione. I vantaggi di
una trave composta acciaio-calcestruzzo rispetto ad una trave in cemento armato o in acciaio sono
evidenti:
- Stabilità: rispetto ad una trave in acciaio da carpenteria, l’elemento composto presenta la parte
in acciaio quasi totalmente tesa, eliminando tutti i problemi legati alla compressione come
l’instabilità locale e l’instabilità flesso-torsionale.
- Leggerezza: Nelle travi composte il calcestruzzo è in minima parte o per nulla teso,
contrariamente alle travi in cemento armato nelle quali il calcestruzzo teso è considerato solo
del peso che non apporta alcun contributo alla resistenza. Ciò produce evidentemente una
notevole riduzione del peso.
- Durabilità: I problemi di fessurazione vengono del tutto arginati, almeno nel caso di travi
semplicemente appoggiate.
- Praticità: E’ possibile, in molti casi, eliminare la casseratura in fase di getto, sostituita dalla
lamiera grecata o dalle predalles.
- Funzionalità: In virtù di una maggior rigidezza della sezione composta e di una riduzione del
peso proprio della struttura si presenta, infine, una riduzione delle deformazioni.
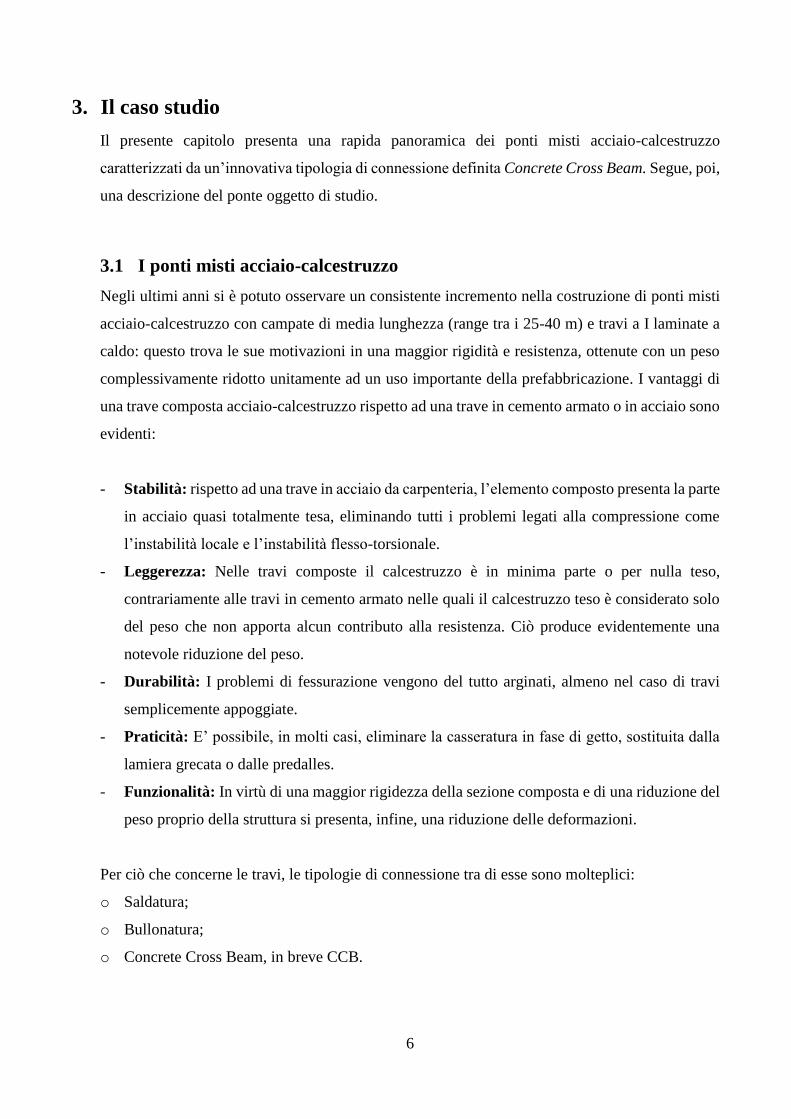
Per ciò che concerne le travi, le tipologie di connessione tra di esse sono molteplici:
o Saldatura;
o Bullonatura;
o Concrete Cross Beam, in breve CCB.
7
Figura 4_Tipologie di connessione.
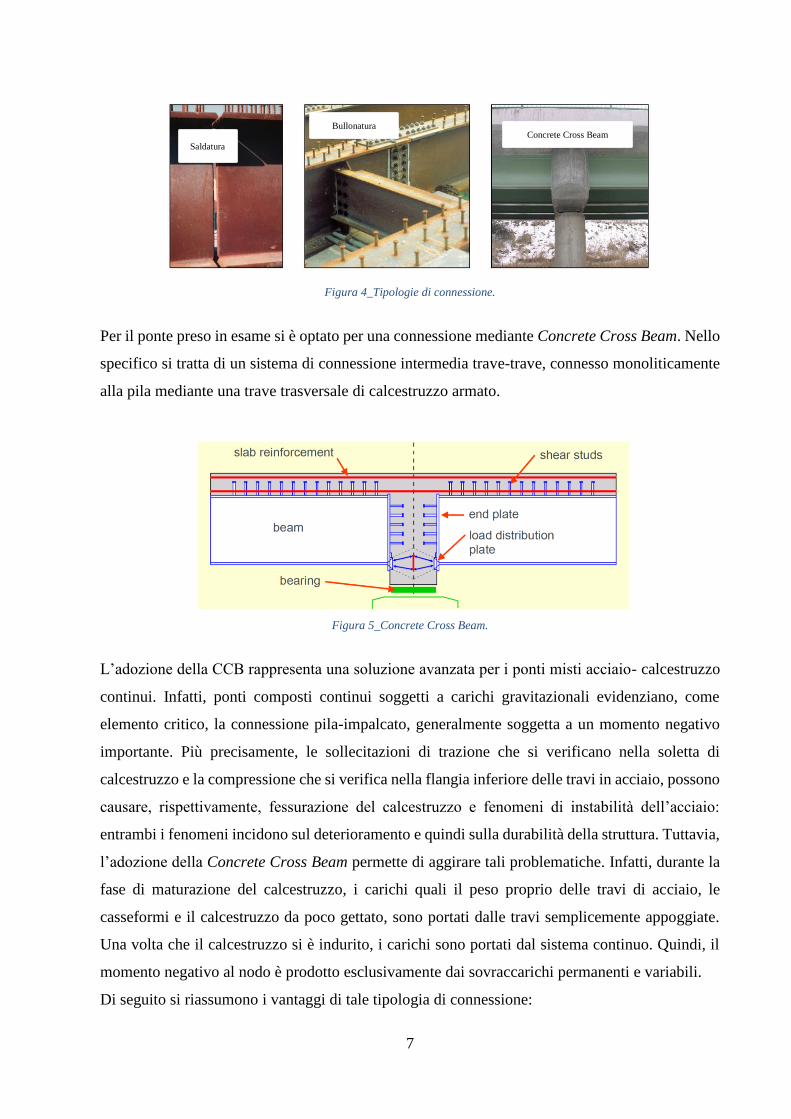
Per il ponte preso in esame si è optato per una connessione mediante Concrete Cross Beam. Nello
specifico si tratta di un sistema di connessione intermedia trave-trave, connesso monoliticamente
alla pila mediante una trave trasversale di calcestruzzo armato.
Figura 5_Concrete Cross Beam.
L’adozione della CCB rappresenta una soluzione avanzata per i ponti misti acciaio- calcestruzzo
continui. Infatti, ponti composti continui soggetti a carichi gravitazionali evidenziano, come
elemento critico, la connessione pila-impalcato, generalmente soggetta a un momento negativo
importante. Più precisamente, le sollecitazioni di trazione che si verificano nella soletta di
calcestruzzo e la compressione che si verifica nella flangia inferiore delle travi in acciaio, possono
causare, rispettivamente, fessurazione del calcestruzzo e fenomeni di instabilità dell’acciaio:
entrambi i fenomeni incidono sul deterioramento e quindi sulla durabilità della struttura. Tuttavia,
l’adozione della Concrete Cross Beam permette di aggirare tali problematiche. Infatti, durante la
fase di maturazione del calcestruzzo, i carichi quali il peso proprio delle travi di acciaio, le
casseformi e il calcestruzzo da poco gettato, sono portati dalle travi semplicemente appoggiate.
Una volta che il calcestruzzo si è indurito, i carichi sono portati dal sistema continuo. Quindi, il
momento negativo al nodo è prodotto esclusivamente dai sovraccarichi permanenti e variabili.
Di seguito si riassumono i vantaggi di tale tipologia di connessione:
Saldatura
Bullonatura Concrete Cross Beam

8
- Le travi sono poste in opera come singole campate;
- Semplicità costruttiva senza bisogno di giunzioni/saldature;
- Riduzione del momento negativo al nodo;
- Minori costi di costruzione;
- Minori restrizioni al traffico nelle fasi realizzative.
3.2 Descrizione del caso studio
Il ponte analizzato in questo lavoro rientra nella classe dei viadotti che bypassano le strade
nazionali con struttura mista acciaio-calcestruzzo e che solitamente presentano campate di luci di
25-30 metri fino al limite superiore di 40 metri. Il ponte è rettilineo (Figura 6 e 7), lungo 40 metri,
e si compone di due campate di 20 metri ciascuna. La larghezza totale della sezione stradale è di
10.60 metri, con carreggiata di 6.50 metri di larghezza e due marciapiedi larghi 2.05 metri. Questa
è una tipica sezione trasversale di un cavalcavia con una corsia per senso di marcia.
Il ponte in esame si compone di quattro travi principali HE600B di acciaio S460 con un interasse
di 2.65 metri (figura 8).
Figura 6_Planimetria e sezione orizzontale del caso studio analizzato.
Figura 7_Sezione longitudinale del ponte analizzato.
9
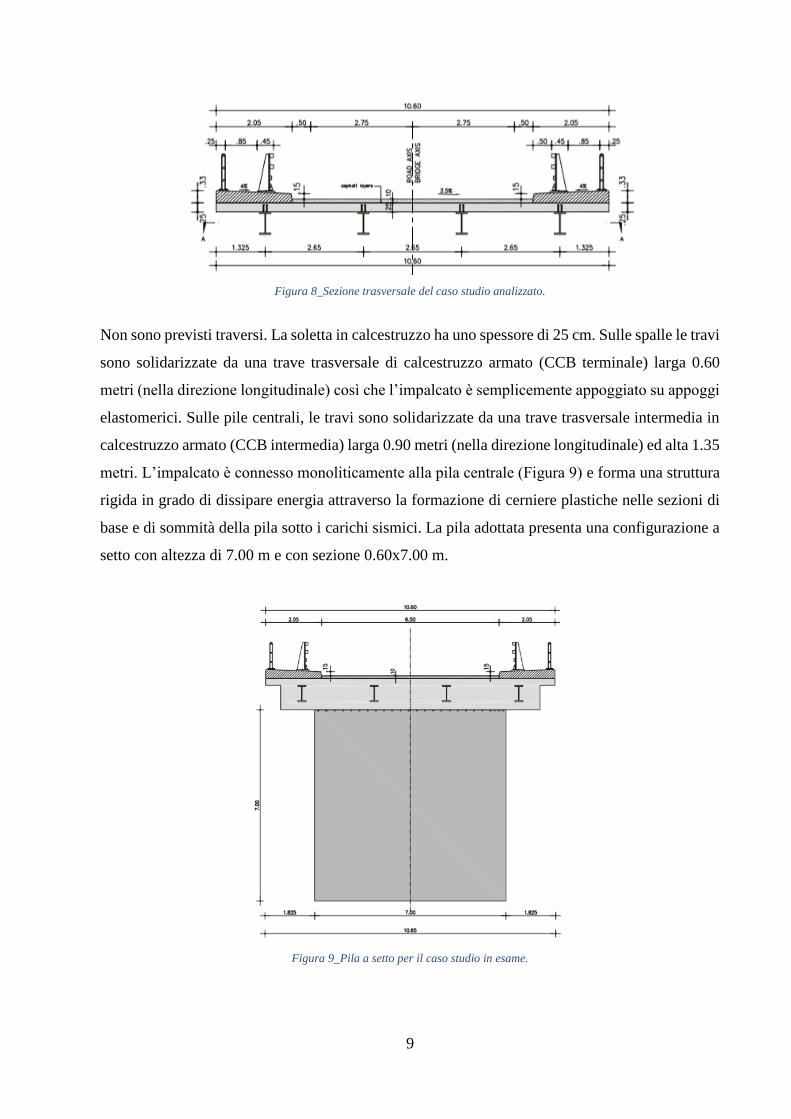
Figura 8_Sezione trasversale del caso studio analizzato.
Non sono previsti traversi. La soletta in calcestruzzo ha uno spessore di 25 cm. Sulle spalle le travi
sono solidarizzate da una trave trasversale di calcestruzzo armato (CCB terminale) larga 0.60
metri (nella direzione longitudinale) così che l’impalcato è semplicemente appoggiato su appoggi
elastomerici. Sulle pile centrali, le travi sono solidarizzate da una trave trasversale intermedia in
calcestruzzo armato (CCB intermedia) larga 0.90 metri (nella direzione longitudinale) ed alta 1.35
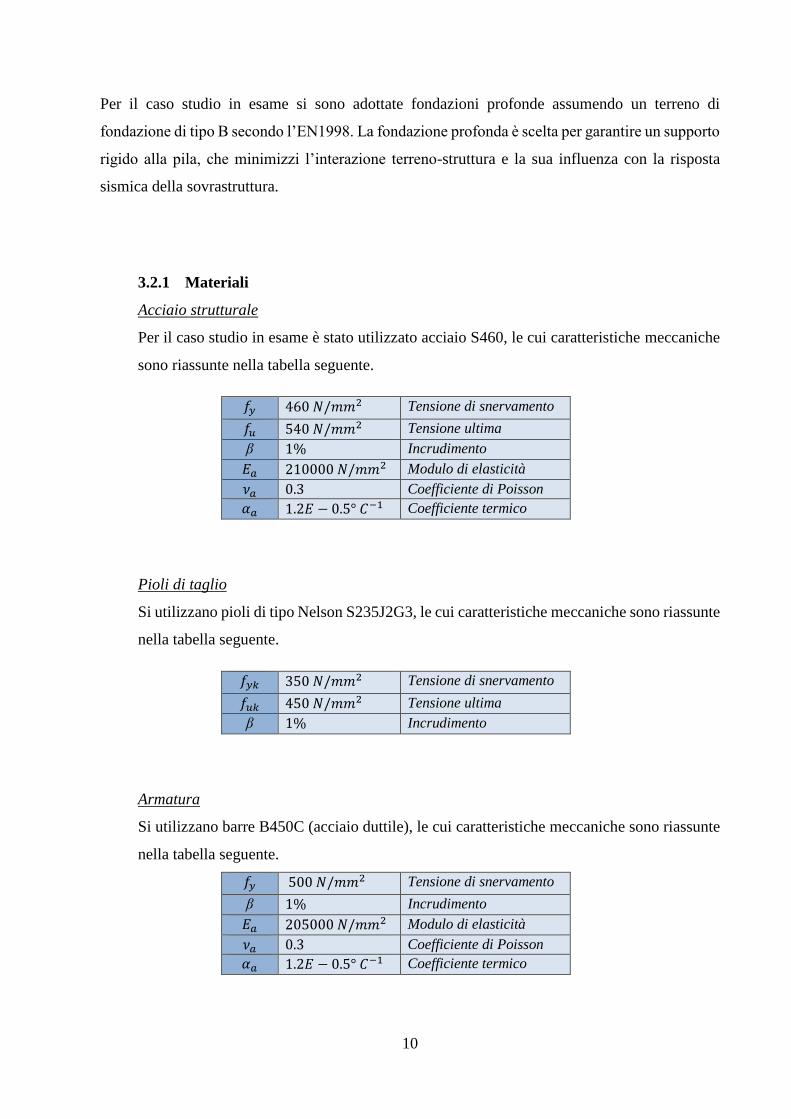
metri. L’impalcato è connesso monoliticamente alla pila centrale (Figura 9) e forma una struttura
rigida in grado di dissipare energia attraverso la formazione di cerniere plastiche nelle sezioni di
base e di sommità della pila sotto i carichi sismici. La pila adottata presenta una configurazione a
setto con altezza di 7.00 m e con sezione 0.60x7.00 m.
Figura 9_Pila a setto per il caso studio in esame.
10
Per il caso studio in esame si sono adottate fondazioni profonde assumendo un terreno di
fondazione di tipo B secondo l’EN1998. La fondazione profonda è scelta per garantire un supporto
rigido alla pila, che minimizzi l’interazione terreno-struttura e la sua influenza con la risposta
sismica della sovrastruttura.
3.2.1 Materiali
Acciaio strutturale
Per il caso studio in esame è stato utilizzato acciaio S460, le cui caratteristiche meccaniche
sono riassunte nella tabella seguente.
𝑓𝑦 460 𝑁/𝑚𝑚2 Tensione di snervamento
𝑓𝑢 540 𝑁/𝑚𝑚2 Tensione ultima
β 1% Incrudimento
𝐸𝑎 210000 𝑁/𝑚𝑚2 Modulo di elasticità
𝜈𝑎 0.3 Coefficiente di Poisson
𝛼𝑎 1.2𝐸 − 0.5° 𝐶−1 Coefficiente termico
Pioli di taglio
Si utilizzano pioli di tipo Nelson S235J2G3, le cui caratteristiche meccaniche sono riassunte
nella tabella seguente.
𝑓𝑦𝑘 350 𝑁/𝑚𝑚2 Tensione di snervamento
𝑓𝑢𝑘 450 𝑁/𝑚𝑚2 Tensione ultima
β 1% Incrudimento
Armatura
Si utilizzano barre B450C (acciaio duttile), le cui caratteristiche meccaniche sono riassunte
nella tabella seguente.
𝑓𝑦 500 𝑁/𝑚𝑚2 Tensione di snervamento
β 1% Incrudimento
𝐸𝑎 205000 𝑁/𝑚𝑚2 Modulo di elasticità
𝜈𝑎 0.3 Coefficiente di Poisson
𝛼𝑎 1.2𝐸 − 0.5° 𝐶−1 Coefficiente termico
11
Calcestruzzo
Si è utilizzato un calcestruzzo di classe C35/45 per la soletta, la pila e per la CCB. Le
caratteristiche meccaniche sono riassunte nella tabella seguente.
3.2.2 Carichi
I carichi considerati nella fase di modellazione sono i seguenti:
• Carichi permanenti strutturali:
- Acciaio strutturale: 78.5 𝑘𝑁/𝑚3. Si considera un incremento del peso
specifico del 5% al fine di tenere in conto delle connessioni, pioli, pittura etc.
78.5 𝑘𝑁/𝑚3 + 3.93 𝑘𝑁/𝑚3 = 82.43 𝑘𝑁/𝑚3
- Calcestruzzo: 25 𝑘𝑁/𝑚3. Per prendere in considerazione altri componenti
della soletta, quali ad esempio le predalles, si considera un carico extra di
1.25 𝑘𝑁/𝑚2.
• Carichi permanenti non strutturali:
- Asfalto: Si considera un peso specifico di 24 𝑘𝑁/𝑚3.
- Barriere di sicurezza: Si considera un carico lineare di 0.65 𝑘𝑁/𝑚.
- Barriere di sicurezza per i pedoni: Si considera un carico lineare di
0.20 𝑘𝑁/𝑚.
- Marciapiede in calcestruzzo: Si considera un carico lineare di 7.40 𝑘𝑁/𝑚.
3.2.3 Fasi costruttive
La realizzazione dell’impalcato viene effettuata attraverso un unico getto di calcestruzzo.
Sono previste le seguenti fasi costruttive:
a) Messa in opera delle travi in acciaio su supporti temporanei;
b) Getto di calcestruzzo della CCB e della soletta in un’unica fase;
c) Rimozione dei supporti temporanei. L’impalcato diventa continuo.
𝑓𝑐𝑚 43 𝑁/𝑚𝑚2 Resistenza media a compressione
𝑓𝑐𝑑 19.83 𝑁/𝑚𝑚2 Resistenza di calcolo a compressione
𝐸𝑐𝑚 34077 𝑁/𝑚𝑚2 Modulo di elasticità
𝜈𝑐 0.2 Coefficiente di Poisson
𝛼𝑐 1𝐸 − 0.5° 𝐶−1 Coefficiente termico
12
Questa procedura è usata principalmente per ponti di piccola-media luce, dove, quindi, il getto
di calcestruzzo per la realizzazione della soletta in un’unica fase è abbastanza semplice. Il
vantaggio principale di questa modalità è la rapidità realizzativa del ponte.
I carichi considerati nelle diverse fasi sono dunque:
a) peso proprio delle travi in acciaio più calcestruzzo bagnato applicato solo alla trave in
acciaio;
b) Carichi permanenti non strutturali più carichi da traffico applicati alla sezione
composta acciaio-calcestruzzo.
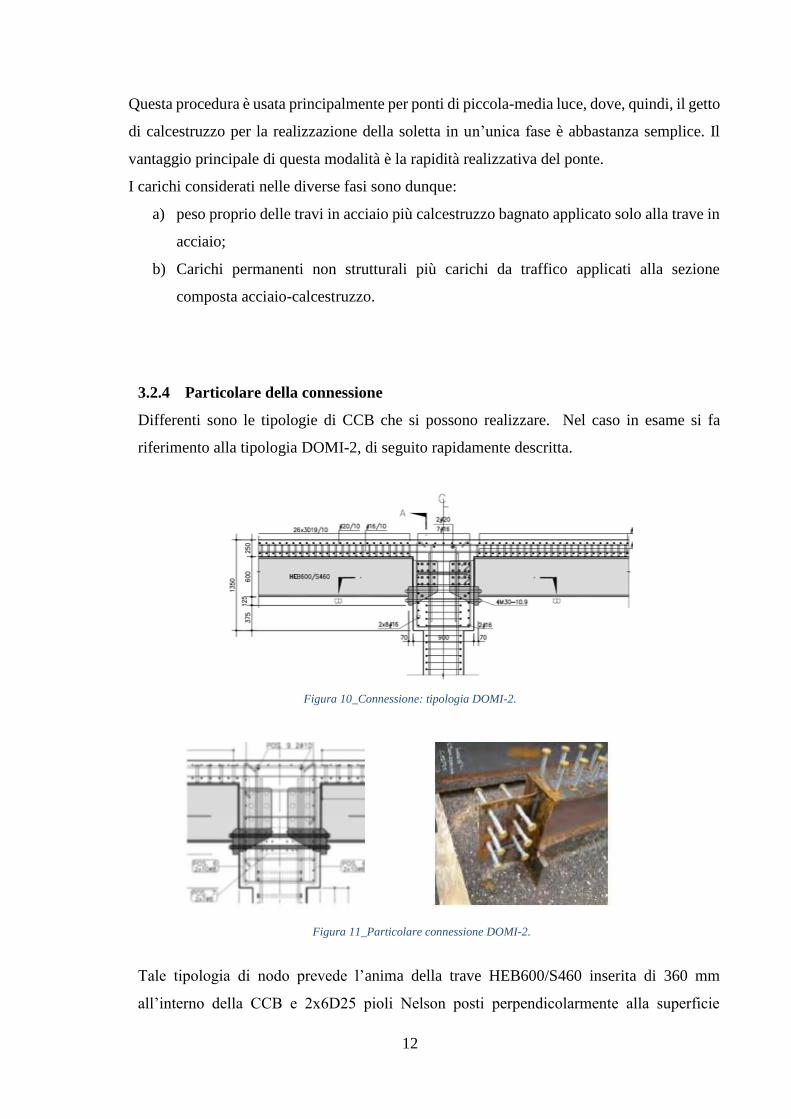
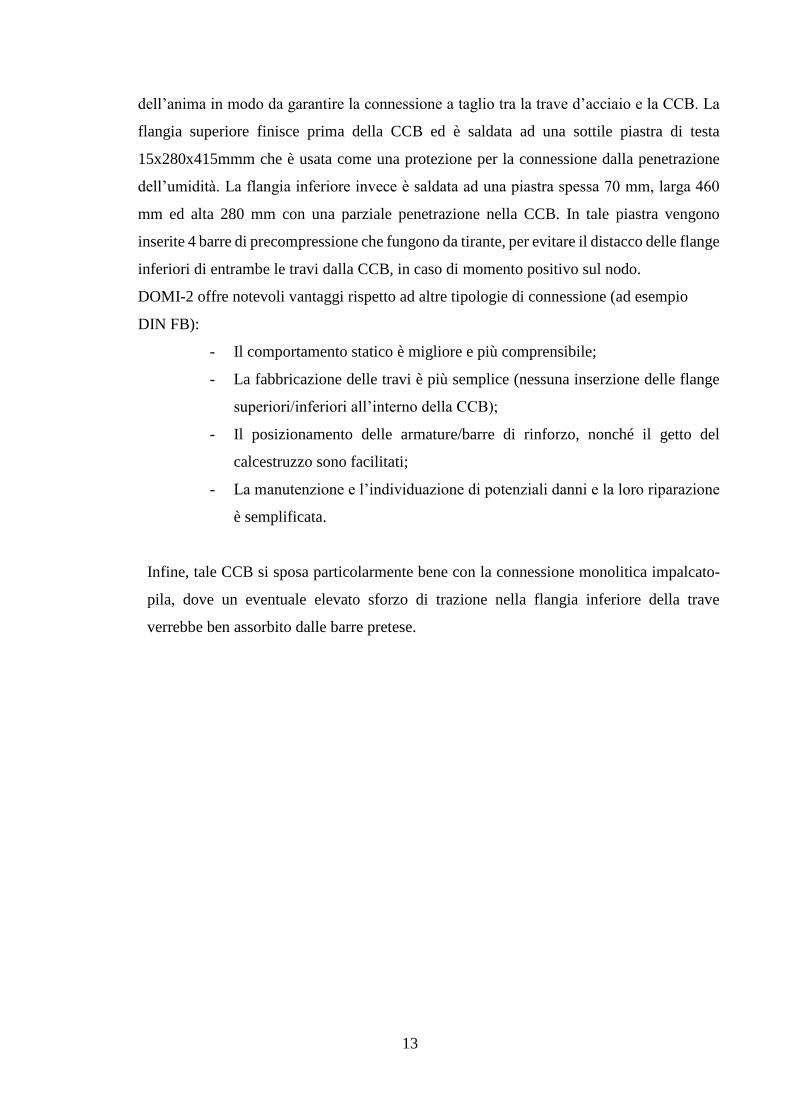
3.2.4 Particolare della connessione
Differenti sono le tipologie di CCB che si possono realizzare. Nel caso in esame si fa
riferimento alla tipologia DOMI-2, di seguito rapidamente descritta.
Figura 10_Connessione: tipologia DOMI-2.
Tale tipologia di nodo prevede l’anima della trave HEB600/S460 inserita di 360 mm
all’interno della CCB e 2x6D25 pioli Nelson posti perpendicolarmente alla superficie
Figura 11_Particolare connessione DOMI-2.
13
dell’anima in modo da garantire la connessione a taglio tra la trave d’acciaio e la CCB. La
flangia superiore finisce prima della CCB ed è saldata ad una sottile piastra di testa
15x280x415mmm che è usata come una protezione per la connessione dalla penetrazione
dell’umidità. La flangia inferiore invece è saldata ad una piastra spessa 70 mm, larga 460
mm ed alta 280 mm con una parziale penetrazione nella CCB. In tale piastra vengono
inserite 4 barre di precompressione che fungono da tirante, per evitare il distacco delle flange
inferiori di entrambe le travi dalla CCB, in caso di momento positivo sul nodo.
DOMI-2 offre notevoli vantaggi rispetto ad altre tipologie di connessione (ad esempio
DIN FB):
- Il comportamento statico è migliore e più comprensibile;
- La fabbricazione delle travi è più semplice (nessuna inserzione delle flange
superiori/inferiori all’interno della CCB);
- Il posizionamento delle armature/barre di rinforzo, nonché il getto del
calcestruzzo sono facilitati;
- La manutenzione e l’individuazione di potenziali danni e la loro riparazione
è semplificata.
Infine, tale CCB si sposa particolarmente bene con la connessione monolitica impalcato-
pila, dove un eventuale elevato sforzo di trazione nella flangia inferiore della trave
verrebbe ben assorbito dalle barre pretese.
14
4. Descrizione del modello numerico
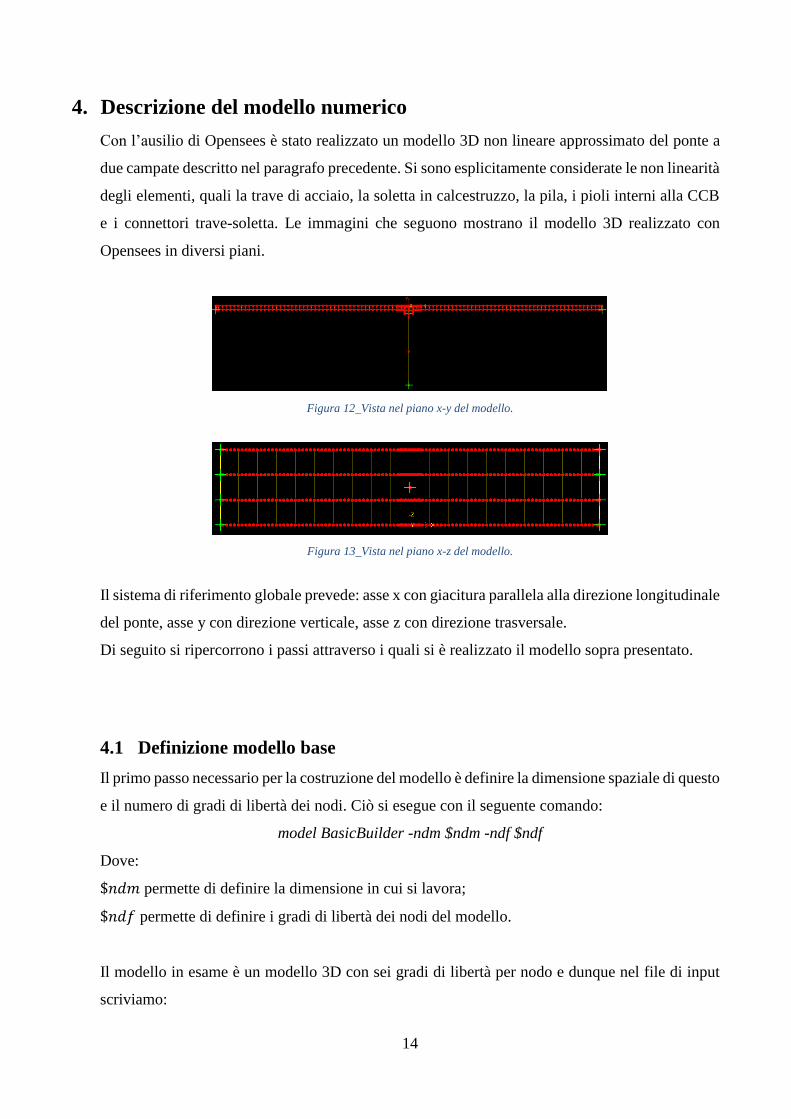
Con l’ausilio di Opensees è stato realizzato un modello 3D non lineare approssimato del ponte a
due campate descritto nel paragrafo precedente. Si sono esplicitamente considerate le non linearità
degli elementi, quali la trave di acciaio, la soletta in calcestruzzo, la pila, i pioli interni alla CCB
e i connettori trave-soletta. Le immagini che seguono mostrano il modello 3D realizzato con
Opensees in diversi piani.
Figura 12_Vista nel piano x-y del modello.
Figura 13_Vista nel piano x-z del modello.
Il sistema di riferimento globale prevede: asse x con giacitura parallela alla direzione longitudinale
del ponte, asse y con direzione verticale, asse z con direzione trasversale.
Di seguito si ripercorrono i passi attraverso i quali si è realizzato il modello sopra presentato.
4.1 Definizione modello base
Il primo passo necessario per la costruzione del modello è definire la dimensione spaziale di questo
e il numero di gradi di libertà dei nodi. Ciò si esegue con il seguente comando:
model BasicBuilder -ndm $ndm -ndf $ndf
Dove:
$𝑛𝑑𝑚 permette di definire la dimensione in cui si lavora;
$𝑛𝑑𝑓 permette di definire i gradi di libertà dei nodi del modello.
Il modello in esame è un modello 3D con sei gradi di libertà per nodo e dunque nel file di input
scriviamo:
15
Figura 14_Comando per definire la dimensione del modello e i gdl dei nodi.
Questo comando, inoltre, ci consente di accedere alla “libreria” dei comandi Tcl che ci permettono
di definire i nodi, gli elementi e i materiali del modello stesso.
4.2 Definizione dei nodi
A questo punto l’utente deve decidere in che unità di misura desidera lavorare. Nel caso in esame
millimetri e Newton saranno usati per la lunghezza e la forza, mentre il tempo verrà misurato in
secondi.
La definizione dei nodi avviene con il seguente comando:
node $nodeTag (ndm $coords)
In cui:
$𝑛𝑜𝑑𝑒𝑇𝑎𝑔 permette di identificare un nodo assegnandoli un nome (un tag);
$𝑐𝑜𝑜𝑟𝑑𝑠 permette di definire le coordinate del nodo, rispetto all’origine, nella direzione x, y e z.
Nodi soletta:
Come già esposto precedentemente, il ponte è costituito da quattro travi, ognuna delle quali
compete una soletta la cui larghezza è di 2.65 metri. Ai nodi si assegnano le coordinate del
baricentro della soletta. Dunque:
- Nella direzione trasversale del ponte (direzione z) i nodi presentano un interasse di 2650 mm;
- Nella direzione longitudinale del ponte (direzione x) i nodi vengono posti ad un interasse di
400 mm, eccetto in prossimità della CCB in cui l’interasse varia da 133 a 150 mm;
- Nella direzione verticale (lungo l’asse y) i nodi presentano sempre coordinata nulla, ovvero
giacciono sul piano z-x.
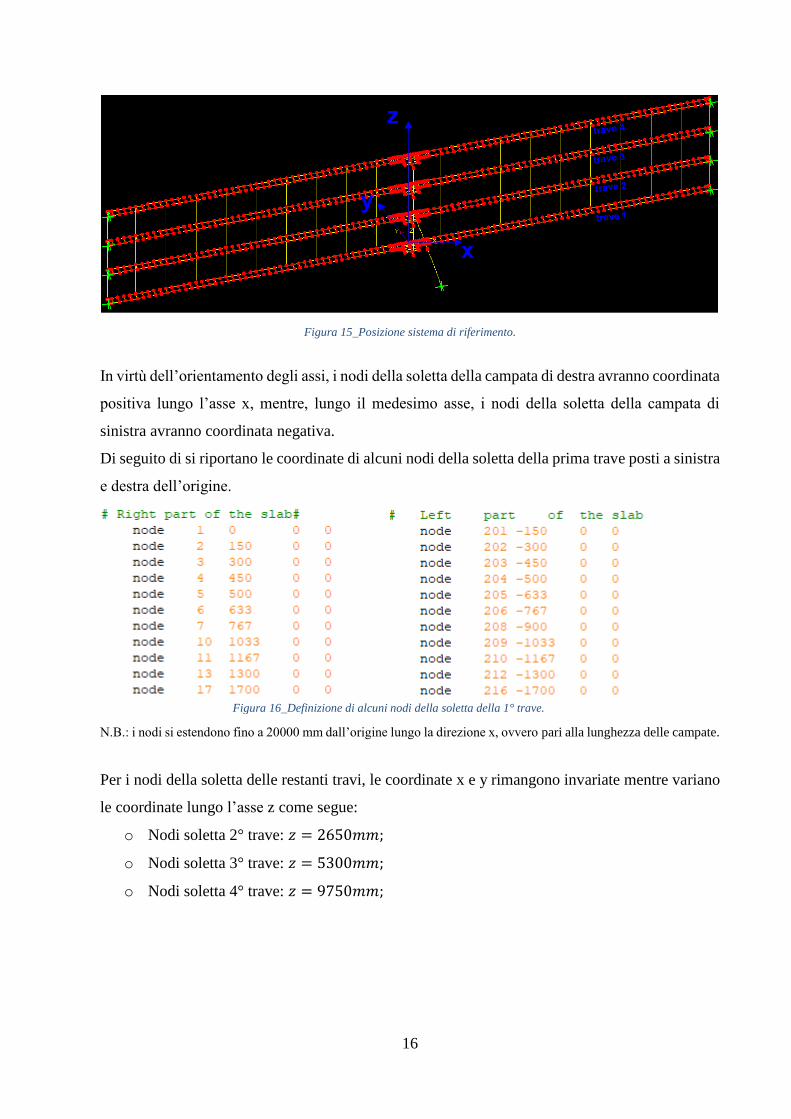
Importante nell’assegnare le coordinate ai nodi, far riferimento, ovviamente, all’origine del
sistema di riferimento, che in tal caso è posto lungo l’asse della soletta di competenza della prima
trave in corrispondenza della pila, come si evince dall’immagine che segue.
16
Figura 15_Posizione sistema di riferimento.
In virtù dell’orientamento degli assi, i nodi della soletta della campata di destra avranno coordinata
positiva lungo l’asse x, mentre, lungo il medesimo asse, i nodi della soletta della campata di
sinistra avranno coordinata negativa.
Di seguito di si riportano le coordinate di alcuni nodi della soletta della prima trave posti a sinistra
e destra dell’origine.
N.B.: i nodi si estendono fino a 20000 mm dall’origine lungo la direzione x, ovvero pari alla lunghezza delle campate.
Per i nodi della soletta delle restanti travi, le coordinate x e y rimangono invariate mentre variano
le coordinate lungo l’asse z come segue:
o Nodi soletta 2° trave: 𝑧 = 2650𝑚𝑚;
o Nodi soletta 3° trave: 𝑧 = 5300𝑚𝑚;
o Nodi soletta 4° trave: 𝑧 = 9750𝑚𝑚;
Figura 16_Definizione di alcuni nodi della soletta della 1° trave.
17
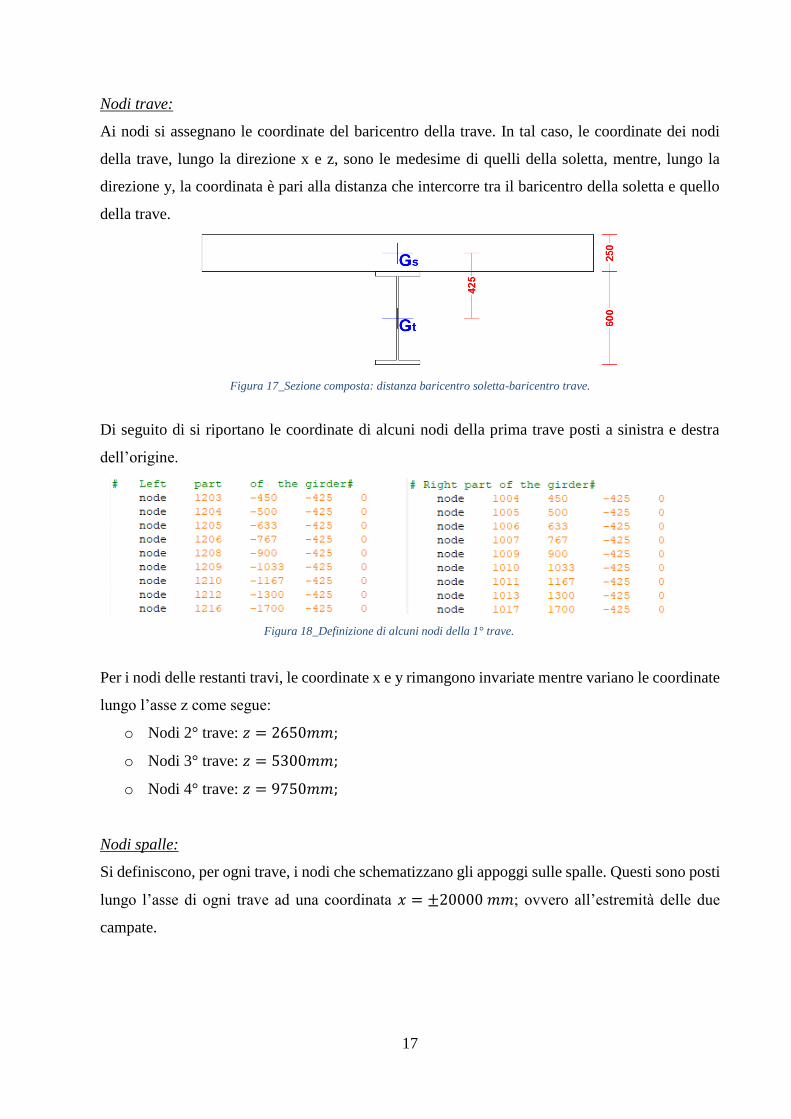
Nodi trave:
Ai nodi si assegnano le coordinate del baricentro della trave. In tal caso, le coordinate dei nodi
della trave, lungo la direzione x e z, sono le medesime di quelli della soletta, mentre, lungo la
direzione y, la coordinata è pari alla distanza che intercorre tra il baricentro della soletta e quello
della trave.
Figura 17_Sezione composta: distanza baricentro soletta-baricentro trave.
Di seguito di si riportano le coordinate di alcuni nodi della prima trave posti a sinistra e destra
dell’origine.
Per i nodi delle restanti travi, le coordinate x e y rimangono invariate mentre variano le coordinate
lungo l’asse z come segue:
o Nodi 2° trave: 𝑧 = 2650𝑚𝑚;
o Nodi 3° trave: 𝑧 = 5300𝑚𝑚;
o Nodi 4° trave: 𝑧 = 9750𝑚𝑚;
Nodi spalle:
Si definiscono, per ogni trave, i nodi che schematizzano gli appoggi sulle spalle. Questi sono posti
lungo l’asse di ogni trave ad una coordinata 𝑥 = ±20000 𝑚𝑚; ovvero all’estremità delle due
campate.
Figura 18_Definizione di alcuni nodi della 1° trave.
18
Nodi pioli trave soletta:
I nodi dei pioli trave-soletta sono disposti nella zona adiacente alla connessione con un interasse
pari a 133 mm. Hanno coordinate analoghe ai nodi della soletta.
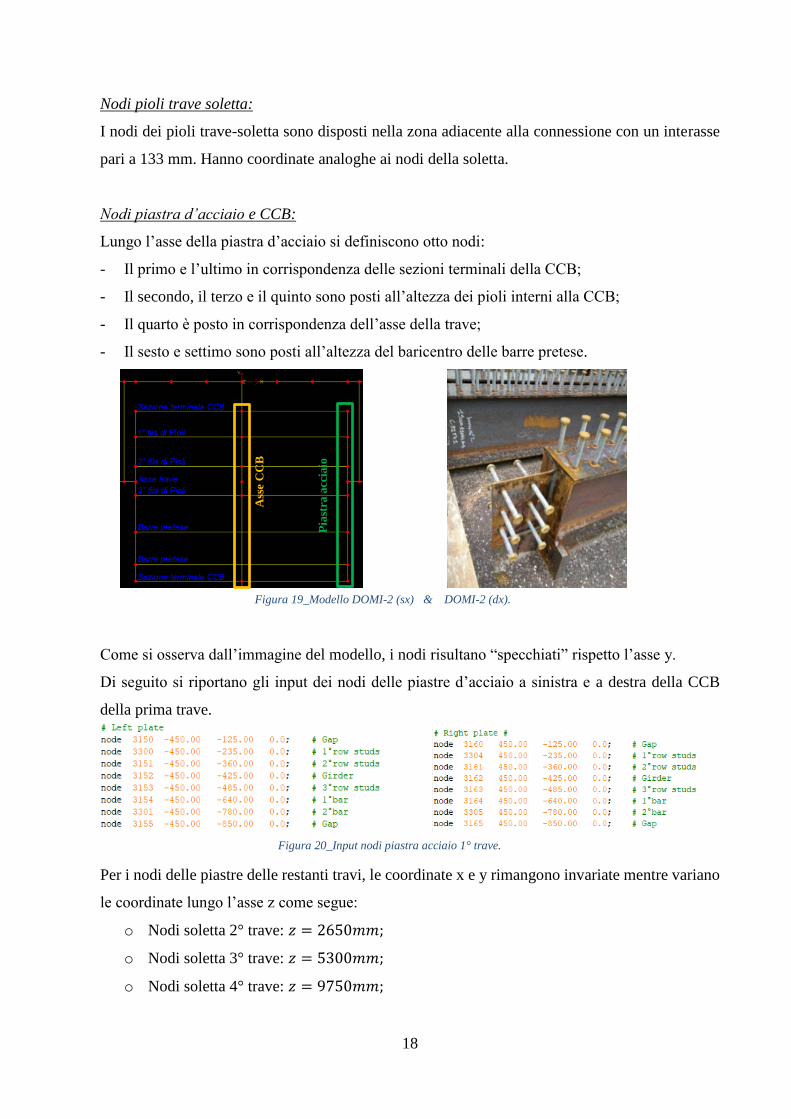
Nodi piastra d’acciaio e CCB:
Lungo l’asse della piastra d’acciaio si definiscono otto nodi:
- Il primo e l’ultimo in corrispondenza delle sezioni terminali della CCB;
- Il secondo, il terzo e il quinto sono posti all’altezza dei pioli interni alla CCB;
- Il quarto è posto in corrispondenza dell’asse della trave;
- Il sesto e settimo sono posti all’altezza del baricentro delle barre pretese.
Come si osserva dall’immagine del modello, i nodi risultano “specchiati” rispetto l’asse y.
Di seguito si riportano gli input dei nodi delle piastre d’acciaio a sinistra e a destra della CCB
della prima trave.
Per i nodi delle piastre delle restanti travi, le coordinate x e y rimangono invariate mentre variano
le coordinate lungo l’asse z come segue:
o Nodi soletta 2° trave: 𝑧 = 2650𝑚𝑚;
o Nodi soletta 3° trave: 𝑧 = 5300𝑚𝑚;
o Nodi soletta 4° trave: 𝑧 = 9750𝑚𝑚;
Pia
stra
acc
iaio
Figura 19_Modello DOMI-2 (sx) & DOMI-2 (dx).
Figura 20_Input nodi piastra acciaio 1° trave.
Ass
e C
CB
19
Lungo l’asse della CCB, come si osserva dalla Figura 19, vengono posti sei nodi:
- Il primo e l’ultimo in corrispondenza delle sezioni terminali della CCB;
- Il secondo, il terzo e il quinto sono posti all’altezza dei pioli interni alla CCB;
- Il quarto è posto in corrispondenza dell’asse della trave.
Le coordinate sono le medesime dei nodi delle piastre, eccetto per la coordinata x che in tal caso
è nulla.
Nodi pila:
La pila alta 7000 mm, viene discretizzata in due elementi di lunghezza 3500 mm. Sono presenti,
dunque, tre nodi:
- Sezione base pila: 𝑛𝑜𝑑𝑒 3167 0 − 8225 3975
- Sezione intermedia: 𝑛𝑜𝑑𝑒 3169 0 − 4725 3975
- Sezione sommità pila: 𝑛𝑜𝑑𝑒 3168 0 − 1225 3975
4.3 Condizioni al contorno
E’ necessario porre le condizioni di vincolo sia in corrispondenza delle spalle che alla base della
pila.
Pila
La connessione pila-fondazione è stata modellata attraverso un vincolo di incastro che non
permette la traslazione lungo i tre assi e la rotazione intorno agli stessi.
In ambiente Opensees, tale vincolo, viene imposto attraverso il comando fix che ci permette di
definire le condizioni al contorno in un singolo punto.
Fix $nodeTag (ndf $constrValues)
Dove:
$nodeTag è il nome del nodo a cui si vogliono definire le condizioni;
$constrValues permette di definire i valori di vincolo relativi ai gradi di libertà:
• 0 nodo libero di traslare/ruotare lungo/intorno l’asse;
• 1 nodo vincolato di traslare/ruotare lungo/intorno l’asse.
In tal caso, il nodo alla base della pila (3167) viene vincolato in tutti i sei gradi di libertà:
fix 3167 1 1 1 1 1 1
20
Spalle:
I nodi posti in concomitanza delle spalle devono replicare le condizioni di vincolo definite dagli
appoggi elastomerici presenti. Tale vincolo è rappresentato con una molla (element twoNodeLink)
di rigidezza 4000 N/mm che lavora assialmente nelle tre direzioni principali e che vincola due
nodi: il nodo della trave all’estremità dell’impalcato con un nodo aggiuntivo vincolato per tutti i
sei gradi di libertà e rappresentativo della spalla.
• 1° step: Si vincolano i nodi rappresentativi le spalle:
1° Trave estremo di sinistra: fix 1400 1 1 1 1 1 1
2° Trave estremo di sinistra: fix 5400 1 1 1 1 1 1
3° Trave estremo di sinistra: fix 9400 1 1 1 1 1 1
4° Trave estremo di sinistra: fix 13400 1 1 1 1 1 1
1° Trave estremo di destra: fix 1201 1 1 1 1 1 1
2° Trave estremo di destra: fix 5201 1 1 1 1 1 1
3° Trave estremo di destra: fix 9201 1 1 1 1 1 1
4° Trave estremo di destra: fix 13201 1 1 1 1 1 1
• 2° step: Si introduce la molla rappresentativa le condizioni di vincolo definite dagli
appoggi, attraverso il seguente comando:
element twoNodeLink $eleTag $iNode $jNode -mat $matTags -dir $dirs -orient $x1 $x2
$x3
In cui:
- $eleTag permette di definire il nome dell’elemento;
- $iNode,$jNode nodi posti all’estremità dell’elemento;
- $matTags tag associato ad un oggetto UniaxialMaterial precedentemente definito. Nello
specifico è stato definito un materiale elastico uniassiale con rigidezza 4000 N/mm che è
stato assegnato alla molla.
uniaxialMaterial Elastic 13 4000
Figura 21_Comportamento UniaxialMaterial Elastic.
21
- $dirs permette di esprimere in che direzione definire le molle:
1,2,3 traslazione lungo gli assi locali;
4,5,6 rotazione attorno gli assi locali.
- orient permette di esprimere come è orientato l’elemento rispetto agli assi globali.
A titolo di esempio si riporta la condizione di vincolo definita dall’appoggio elastomerico
presente in corrispondenza della 1° trave della campata di destra.
4.4 Modellazione soletta
La soletta è modellata usando degli elementi non lineari, con sezione discretizzata in fibre, definiti
lungo i rispettivi piani baricentrici. Un modello a fibre considera la non linearità distribuita
nell’elemento. In contrasto con il modello di plasticità concentrata, la non linearità del materiale
permette di ricavare il comportamento dell’elemento mediante un’integrazione della risposta nella
sezione.
Il comando utilizzato per la modellazione della soletta è il seguente:
element nonlinearBeamColumn $eletag $iNode $jNode $numIngrPts $secTag $transtag
Dove:
$eletag:
Permette di definire il nome dell’elemento.
$iNode & $jNode:
Si richiamano i nodi posti all’inizio e alla fine dell’elemento.
$numIngrPts:
Numero di punti d’integrazione lungo l’elemento; posto pari a tre.
Figura 22_Esempio vincolo appoggio elastomerico: 1° trave campata di dx.

22
$secTag:
Permette di identificare l’oggetto Sezione definito in precedenza.
Il comportamento meccanico dell’acciaio (B450C) e del calcestruzzo (C 35/45) sono modellati,
rispettivamente, mediante il modello Menegotto-Pinto e Kent-Park.
Tali comportamenti sono riproposti attraverso i seguenti comandi:
uniaxialMaterial Concrete01 $matTag $fpc $epsc0 $fpcu $epsU
- $matTag nome assegnato al materiale: 1;
- $fpc compressione a 28 giorni: −43 𝑁/𝑚𝑚2;
- $epsc0 deformazione relativa alla massima compressione: −0.002;
- $fpcu resistenza ultima a compressione: −34 𝑁/𝑚𝑚2;
- $epsU deformazione ultima: −0.006.
N.B.: In ambiente Opensees la compressione è negativa.
uniaxialMaterial Steel02 $matTag $Fy $E $b $R0 $cR1 $cR2
- $matTag nome assegnato al materiale 9;
- $Fy tensione di snervamento: 500 𝑁/𝑚𝑚2;
- $E modulo elastico: 205000 𝑁/𝑚𝑚2;
- $b incrudimento: 0.005;
- $R0, $cR1, $cR2 parametri per controllare la transizione dal ramo elastico a quello plastico:
$R0=18; $cR1=0.925; $cR2 =0.15.
Come già accennato precedentemente la sezione viene discretizzata in fibre attraverso il comando:
section Fiber $secTag {
Questo comando consente all’utente di costruire un oggetto FiberSection. Ogni oggetto
FiberSection è composto da fibre, ciascuna fibra contenente un materiale uniassiale, un'area e una
Figura 23_Modello Menegotto-Pinto (sx); modello Kent and Park (dx).
23
posizione (y, z). Il comando per generare l'oggetto FiberSection contiene in {} i comandi per
generare tutte le fibre nell'oggetto.
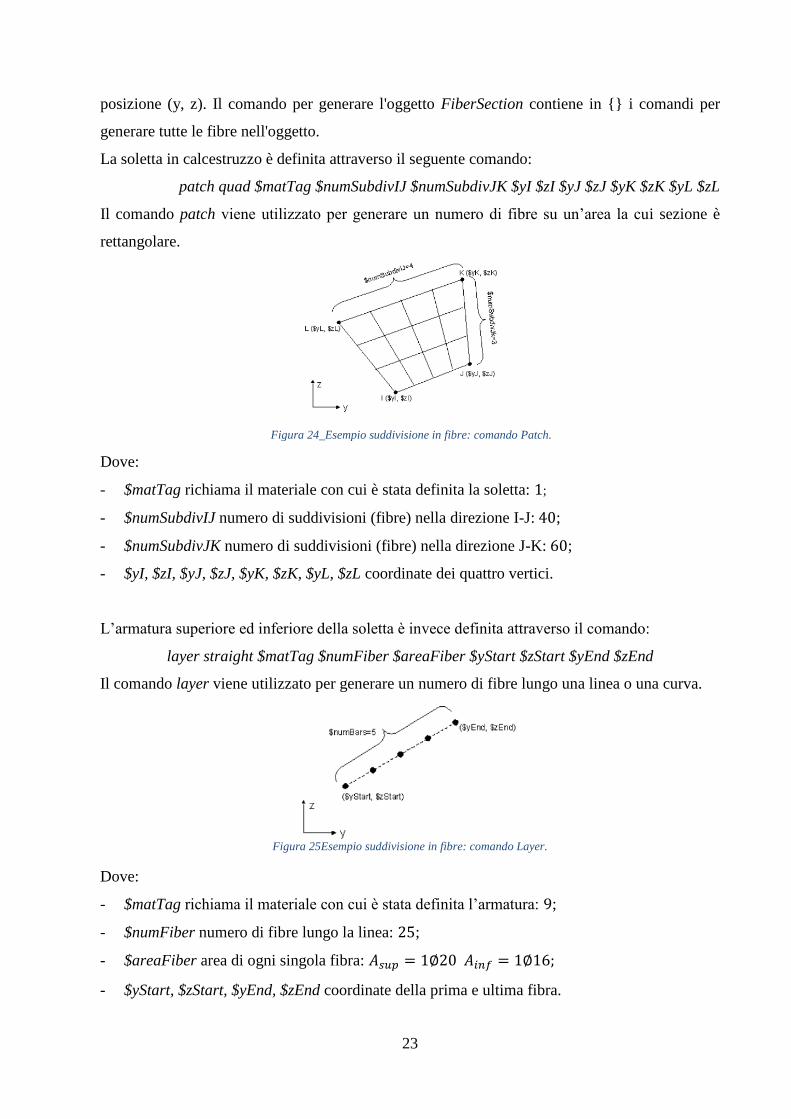
La soletta in calcestruzzo è definita attraverso il seguente comando:
patch quad $matTag $numSubdivIJ $numSubdivJK $yI $zI $yJ $zJ $yK $zK $yL $zL
Il comando patch viene utilizzato per generare un numero di fibre su un’area la cui sezione è
rettangolare.
Dove:
- $matTag richiama il materiale con cui è stata definita la soletta: 1;
- $numSubdivIJ numero di suddivisioni (fibre) nella direzione I-J: 40;
- $numSubdivJK numero di suddivisioni (fibre) nella direzione J-K: 60;
- $yI, $zI, $yJ, $zJ, $yK, $zK, $yL, $zL coordinate dei quattro vertici.
L’armatura superiore ed inferiore della soletta è invece definita attraverso il comando:
layer straight $matTag $numFiber $areaFiber $yStart $zStart $yEnd $zEnd
Il comando layer viene utilizzato per generare un numero di fibre lungo una linea o una curva.
Figura 25Esempio suddivisione in fibre: comando Layer.
Dove:
- $matTag richiama il materiale con cui è stata definita l’armatura: 9;
- $numFiber numero di fibre lungo la linea: 25;
- $areaFiber area di ogni singola fibra: 𝐴𝑠𝑢𝑝 = 1∅20 𝐴𝑖𝑛𝑓 = 1∅16;
- $yStart, $zStart, $yEnd, $zEnd coordinate della prima e ultima fibra.
Figura 24_Esempio suddivisione in fibre: comando Patch.

24
Si riportano, di seguito, i comandi utilizzati per la definizione della soletta e un’immagine della
stessa.
Figura 26_Comando Section Fiber soletta.
Figura 27_Sezione della soletta discretizzata in fibre.
La sezione così definita tiene conto della flessione e del taglio ma non della torsione. E’ necessario,
quindi, introdurre il comando “Section Aggregator” che aggiunge alla resistenza flessionale e a
taglio della soletta (sezione 10) anche la resistenza torsionale.
section Aggregator $secTag $matTag1 $dof1 -section $sectionTag
Dove:
- $secTag permette di assegnare il nome alla sezione che si sta definendo;
- $matTag1 permette di richiamare il nome di un materiale precedentemente definito a cui si è
assegnata la resistenza torsionale:
uniaxialMaterial Elastic 100 [expr {$Gc*$Is}];
𝐺𝑐 ∗ 𝐼𝑠 = 𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙𝑒;
𝐺𝑐 =𝐸𝑐
2 ∗ (1 + 𝜈) = 𝑀𝑜𝑑𝑢𝑙𝑜 𝑑𝑖 𝑡𝑎𝑔𝑙𝑖𝑜;
𝐼𝑠 = 𝐼𝑥 + 𝐼𝑦 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑′𝑖𝑛𝑒𝑟𝑧𝑎 𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙𝑒.
- $dof1 permette di definire la sollecitazione che deve essere modellata da tale sezione: 𝑇 ;
- $sectionTag sezione a cui si vuole assegnare la resistenza torsionale: soletta (sezione 10);
In conclusione, il comando che racchiude la modellazione della sezione è il seguente:
Figura 28_Comando: Section Aggregator soletta.

25
$transtag:
Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il comando con cui è
possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Questo definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali della soletta della campata di sinistra e di destra vengono così orientati:
A titolo di esempio si riporta la modellazione di alcuni elementi della soletta della prima trave
posti a sinistra e destra dell’origine.
Per quanto concerne la modellazione del comportamento globale trasversale del ponte, sul piano
della soletta, ogni 2000 mm sono posti dei traversi fittizi che simulano la rigidezza trasversale
dell’impalcato.
Figura 29_Assi locali soletta campata di destra.
Figura 30_Assi locali soletta campata di sinistra.
Figura 31_Modellazione soletta 1°trave.
Figura 32_Traversi fittizi.

26
Tali elementi sono modellati come elementi elastici aventi la sezione della soletta, aventi quindi
rigidezza ma non peso (già contemplato nella modellazione longitudinale della soletta).
Il comando utilizzato per la definizione di elementi elastici è il seguente:
element elasticBeamColumn $eleTag $iNode $jNode $A $E $G $J $Iy $Iz $transfTag
Dove:
- $eleTag permette di definire il nome dell’elemento;
- $iNode & $jNode:si richiamano i nodi posti all’inizio e alla fine dell’elemento;
- $A: Area della sezione trasversale dell’elemento:250𝑚𝑚 ∗ 2000𝑚𝑚 = 500000 𝑚𝑚2;
- $E: Modulo elastico: 34077 𝑁/𝑚𝑚2;
- $G: Modulo di taglio: 𝐸 2 ∗ (1 + 𝜈)⁄ ;
- $J: Momento d’inerzia torsionale: (Iy + Iz)𝑚𝑚4;
- $Iy: Momento d’inerzia rispetto l’asse y: 𝑏ℎ3/12 𝑚𝑚4;
- $Iz: Momento d’inerzia rispetto l’asse z:ℎ𝑏3/12 𝑚𝑚4;
- $transfTag: Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il
comando con cui è possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Questo definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi
globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali dei pioli sono così orientati:
Figura 33_Assi locali soletta direzione trasversale.

27
4.5 Modellazione trave
La trave è modellata usando degli elementi non lineari, con sezione discretizzata in fibre, definiti
lungo i rispettivi piani baricentrici.
Il comando utilizzato per la modellazione della soletta è il seguente:
element nonlinearBeamColumn $eletag $iNode $jNode $numIngrPts $secTag $transtag
Dove:
$eletag:
Permette di definire il nome dell’elemento.
$iNode & $jNode:
Si richiamano i nodi posti all’inizio e alla fine dell’elemento.
$numIngrPts:
Numero di punti d’integrazione lungo l’elemento; posto pari a tre.
$secTag:
Permette di identificare l’oggetto Sezione definito in precedenza.
Il comportamento meccanico dell’acciaio (S460) della trave è modellato mediante il modello
Menegotto-Pinto.
Tale comportamento è riproposto attraverso il seguente comando:
uniaxialMaterial Steel02 $matTag $Fy $E $b $R0 $cR1 $cR2
- $matTag nome assegnato al materiale 8;
- $Fy tensione di snervamento: 460 𝑁/𝑚𝑚2;
- $E modulo elastico: 210000 𝑁/𝑚𝑚2;
- $b incrudimento: 0.005;
Figura 34_Modello Menegotto-Pinto.

28
- $R0, $cR1, $cR2 parametri per controllare la transizione dal ramo elastico a quello plastico.
Stessi valori assunti nella modellazione dell’armatura nella soletta.
Come già accennato precedentemente la sezione viene discretizzata in fibre attraverso il comando:
section Fiber $secTag {
Questo comando consente all’utente di costruire un oggetto FiberSection. Ogni oggetto
FiberSection è composto da fibre, ciascuna fibra contenente un materiale uniassiale, un'area e una
posizione (y, z). Il comando per generare l'oggetto FiberSection contiene in {} i comandi per
generare tutte le fibre nell'oggetto.
La trave in acciaio è definita attraverso il seguente comando:
patch quad $matTag $numSubdivIJ $numSubdivJK $yI $zI $yJ $zJ $yK $zK $yL $zL
Il comando patch viene utilizzato per generare un numero di fibre su un’area la cui sezione è
rettangolare.
Dove:
- $matTag richiama il materiale con cui è stata definita la trave: 8;
- $numSubdivIJ numero di suddivisioni (fibre) nella direzione I-J:
o Ala superiore: 16;
o Anima: 4;
o Ala inferiore: 16;
- $numSubdivJK numero di suddivisioni (fibre) nella direzione J-K:
o Ala superiore: 4;
o Anima: 16;
o Ala inferiore: 4;
- $yI, $zI, $yJ, $zJ, $yK, $zK, $yL, $zL coordinate dei quattro vertici del rettangolo considerato.
Figura 35_Esempio suddivisione in fibre: comando Patch.

29
Si riportano, di seguito, i comandi utilizzati per la definizione della trave e un’immagine della
stessa.
Figura 36_Comando Section Fiber trave.
Figura 37_Sezione della trave discretizzata in fibre.
La sezione così definita tiene conto della flessione e del taglio ma non della torsione. E’ necessario,
quindi, introdurre il comando “Section Aggregator” che aggiunge alla resistenza flessionale e a
taglio della trave (sezione 20) anche la resistenza torsionale.
section Aggregator $secTag $matTag1 $dof1 -section $sectionTag
Dove:
- $secTag permette di assegnare il nome alla sezione che si sta definendo;
- $matTag1 permette di richiamare il nome di un materiale precedentemente definito a cui si è
assegnata la resistenza torsionale:
30
uniaxialMaterial Elastic 110 [expr {$Gs*$Ig}];
𝐺𝑠 ∗ 𝐼𝑔 = 𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙𝑒;
𝐺𝑠 =𝐸𝑠
2 ∗ (1 + 𝜈) = 𝑀𝑜𝑑𝑢𝑙𝑜 𝑑𝑖 𝑡𝑎𝑔𝑙𝑖𝑜;
𝐼𝑔 = 𝐼𝑥 + 𝐼𝑦 = 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑′𝑖𝑛𝑒𝑟𝑧𝑖𝑎 𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙𝑒.
- $dof1 permette di definire la sollecitazione che deve essere modellata da tale sezione: 𝑇 ;
- $sectionTag sezione a cui si vuole assegnare la resistenza torsionale: soletta (sezione 20);
In conclusione, il comando che racchiude la modellazione della sezione è il seguente:
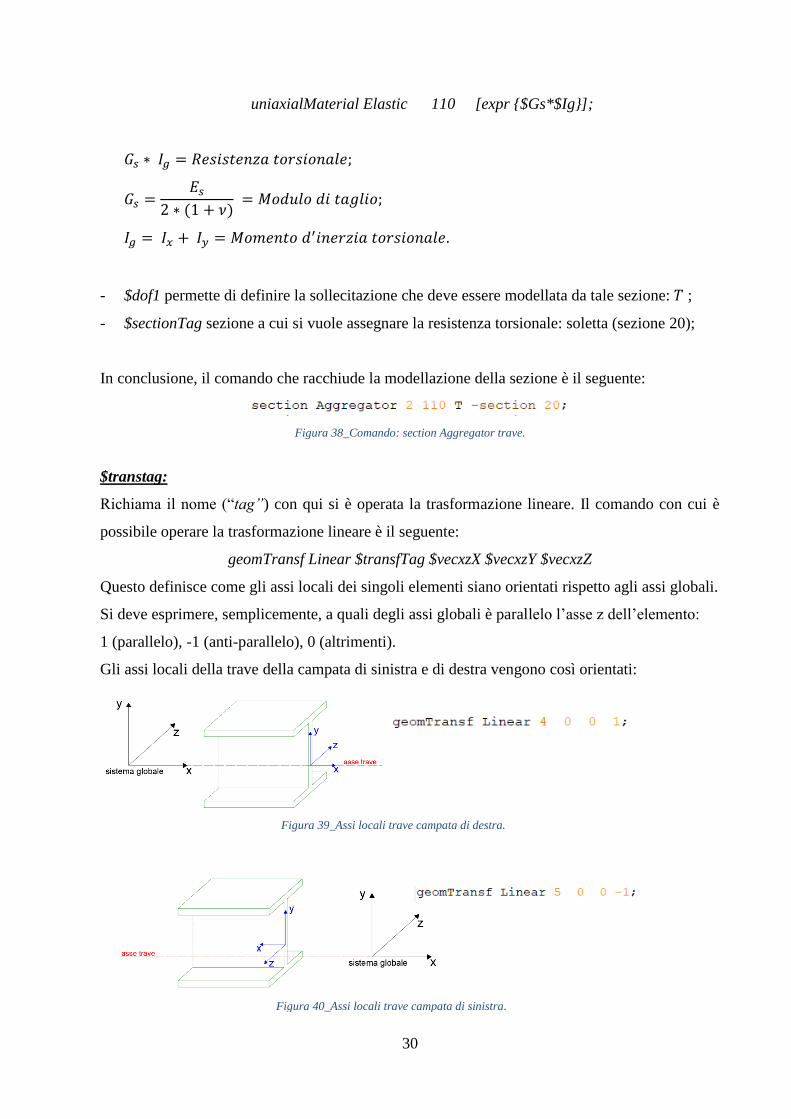
Figura 38_Comando: section Aggregator trave.
$transtag:
Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il comando con cui è
possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Questo definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali della trave della campata di sinistra e di destra vengono così orientati:
Figura 39_Assi locali trave campata di destra.
Figura 40_Assi locali trave campata di sinistra.
31
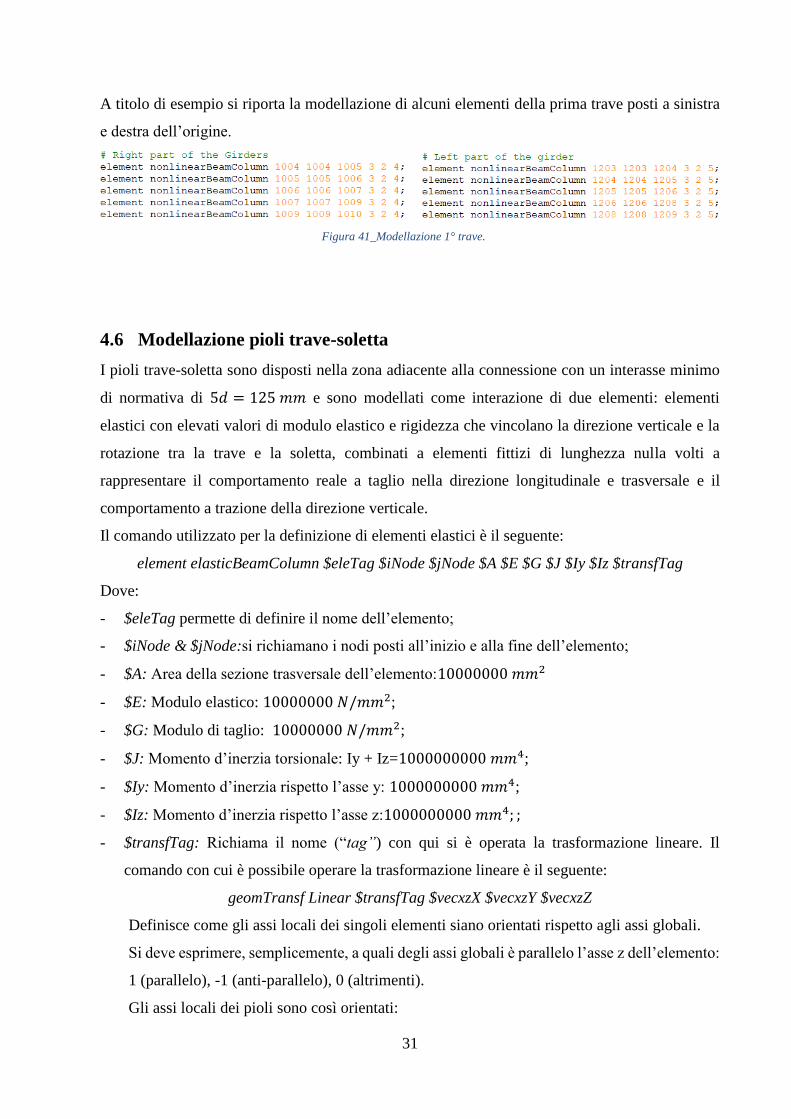
A titolo di esempio si riporta la modellazione di alcuni elementi della prima trave posti a sinistra
e destra dell’origine.
4.6 Modellazione pioli trave-soletta
I pioli trave-soletta sono disposti nella zona adiacente alla connessione con un interasse minimo
di normativa di 5𝑑 = 125 𝑚𝑚 e sono modellati come interazione di due elementi: elementi
elastici con elevati valori di modulo elastico e rigidezza che vincolano la direzione verticale e la
rotazione tra la trave e la soletta, combinati a elementi fittizi di lunghezza nulla volti a
rappresentare il comportamento reale a taglio nella direzione longitudinale e trasversale e il
comportamento a trazione della direzione verticale.
Il comando utilizzato per la definizione di elementi elastici è il seguente:
element elasticBeamColumn $eleTag $iNode $jNode $A $E $G $J $Iy $Iz $transfTag
Dove:
- $eleTag permette di definire il nome dell’elemento;
- $iNode & $jNode:si richiamano i nodi posti all’inizio e alla fine dell’elemento;
- $A: Area della sezione trasversale dell’elemento:10000000 𝑚𝑚2
- $E: Modulo elastico: 10000000 𝑁/𝑚𝑚2;
- $G: Modulo di taglio: 10000000 𝑁/𝑚𝑚2;
- $J: Momento d’inerzia torsionale: Iy + Iz=1000000000 𝑚𝑚4;
- $Iy: Momento d’inerzia rispetto l’asse y: 1000000000 𝑚𝑚4;
- $Iz: Momento d’inerzia rispetto l’asse z:1000000000 𝑚𝑚4; ;
- $transfTag: Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il
comando con cui è possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali dei pioli sono così orientati:
Figura 41_Modellazione 1° trave.

32
Il comando utilizzato per la definizione di elementi fittizi di lunghezza nulla volti a rappresentare
il comportamento reale a taglio nella direzione longitudinale e trasversale e il comportamento a
trazione della direzione verticale è il seguente:
element zeroLength $eleTag $iNode $jNode -mat $matTag1 $matTag2 ... -dir $dir1 $dir2 …
Di seguito si riporta un esempio.
Quindi, si definisce l’elemento 3005 di lunghezza nulla; infatti, collega due nodi aventi stesse
coordinate (2005 nodo del piolo e 5 nodo della soletta). Lungo la direzione 1 e 3, ovvero lungo
l’asse locale x e z, viene definito il materiale 6 che esprime il comportamento a taglio:
In particolare la resistenza a taglio 𝑄𝑢 del singolo piolo è calcolata secondo EN 1994-2 (2006),
paragrafo 6.3.2, che fa riferimento ai connettori a piolo con testa in solette piene di calcestruzzo.
La relativa rigidezza è calcolata invece secondo il modello di Gattesco e Giuriani [35]:
𝑄
𝑄𝑢= 𝛼√1 − 𝑒−
𝛽∗𝑠𝛼 + 𝛾 ∗ 𝑠
Dove:
𝛼 = 0.97;
𝛽 = 1.3 𝑚𝑚−1;
𝛾 = 0.0045 𝑚𝑚−1.
Figura 42_Orientamento assi locali pioli.
Figura 43_Definizione elemento zerolength.
Figura 44_Definizione comportamento a taglio Pioli.

33
Secondo questo legame costitutivo taglio-spostamento, la rigidezza è assunta come la pendenza
della retta che interseca la curva attorno a 0.4 =𝑄
𝑄𝑢 (figura 45):
Ciascun elemento zerolenght rappresenta due pioli allineati trasversalmente. Le proprietà
meccaniche dei pioli trave-soletta sono dunque:
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑎 𝑡𝑎𝑔𝑙𝑖𝑜 𝑄𝑢,𝑑𝑢𝑒 𝑝𝑖𝑜𝑙𝑖 = 290 𝑘𝑁
𝑅𝑖𝑔𝑖𝑑𝑒𝑧𝑧𝑎 𝐾𝑑𝑢𝑒 𝑝𝑖𝑜𝑙𝑖 = 864 𝑘𝑁/𝑚𝑚
Lungo la direzione 2, ovvero lungo l’asse locale y, viene definito il materiale 2 che esprime il
comportamento a trazione.
Per quanto riguarda tale comportamento, questo è considerato e verificato in merito alle
indicazioni fornite da EN 1994-2 (2006) ed integrate con quanto riportato in Design Handbook
precast and prestressed concrete (Chicago, 1999). Secondo il manuale, la resistenza a trazione
del piolo si basa su una duplice verifica che dipende dal meccanismo di rottura: la rottura del piolo
o quella del calcestruzzo attorno al piolo. In aggiunta, nel secondo caso risulta necessario
comprendere se la rottura coinvolga un singolo piolo o il gruppo di pioli. Nel caso di un gruppo
di pioli la superficie di rottura del calcestruzzo assume una forma piramidale. Le proprietà
meccaniche dei pioli trave-soletta sono:
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑎 𝑡𝑟𝑎𝑧𝑖𝑜𝑛𝑒 𝐹𝑡,𝑑𝑢𝑒 𝑝𝑖𝑜𝑙𝑖 = 111 𝑘𝑁
𝑅𝑖𝑔𝑖𝑑𝑒𝑧𝑧𝑎 𝐾𝑑𝑢𝑒 𝑝𝑖𝑜𝑙𝑖 = 800 𝑘𝑁/𝑚𝑚
Figura 45_Legge costitutiva taglio-spostamento dei pioli secondo Gattesco-Giuriani.
Figura 46_Definizione comportamento a trazione pioli.
34
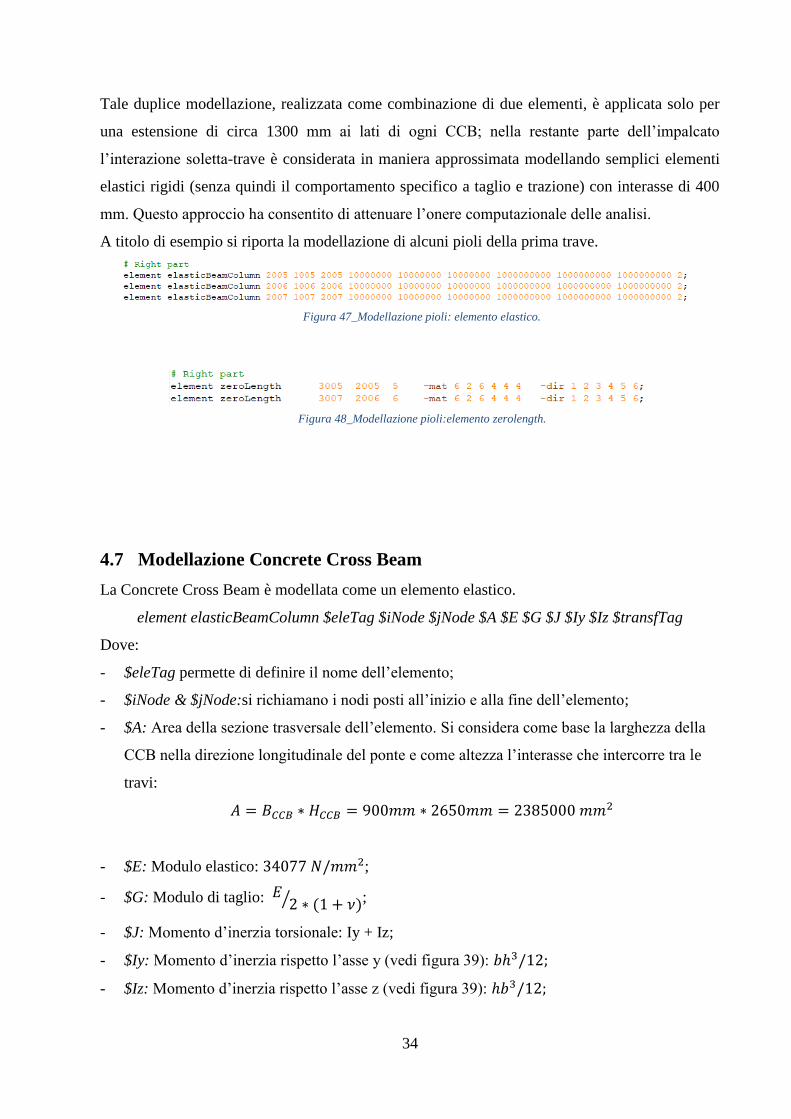
Tale duplice modellazione, realizzata come combinazione di due elementi, è applicata solo per
una estensione di circa 1300 mm ai lati di ogni CCB; nella restante parte dell’impalcato
l’interazione soletta-trave è considerata in maniera approssimata modellando semplici elementi
elastici rigidi (senza quindi il comportamento specifico a taglio e trazione) con interasse di 400
mm. Questo approccio ha consentito di attenuare l’onere computazionale delle analisi.
A titolo di esempio si riporta la modellazione di alcuni pioli della prima trave.
4.7 Modellazione Concrete Cross Beam
La Concrete Cross Beam è modellata come un elemento elastico.
element elasticBeamColumn $eleTag $iNode $jNode $A $E $G $J $Iy $Iz $transfTag
Dove:
- $eleTag permette di definire il nome dell’elemento;
- $iNode & $jNode:si richiamano i nodi posti all’inizio e alla fine dell’elemento;
- $A: Area della sezione trasversale dell’elemento. Si considera come base la larghezza della
CCB nella direzione longitudinale del ponte e come altezza l’interasse che intercorre tra le
travi:
𝐴 = 𝐵𝐶𝐶𝐵 ∗ 𝐻𝐶𝐶𝐵 = 900𝑚𝑚 ∗ 2650𝑚𝑚 = 2385000 𝑚𝑚2
- $E: Modulo elastico: 34077 𝑁/𝑚𝑚2;
- $G: Modulo di taglio: 𝐸 2 ∗ (1 + 𝜈)⁄ ;
- $J: Momento d’inerzia torsionale: Iy + Iz;
- $Iy: Momento d’inerzia rispetto l’asse y (vedi figura 39): 𝑏ℎ3/12;
- $Iz: Momento d’inerzia rispetto l’asse z (vedi figura 39): ℎ𝑏3/12;
Figura 47_Modellazione pioli: elemento elastico.
Figura 48_Modellazione pioli:elemento zerolength.
35
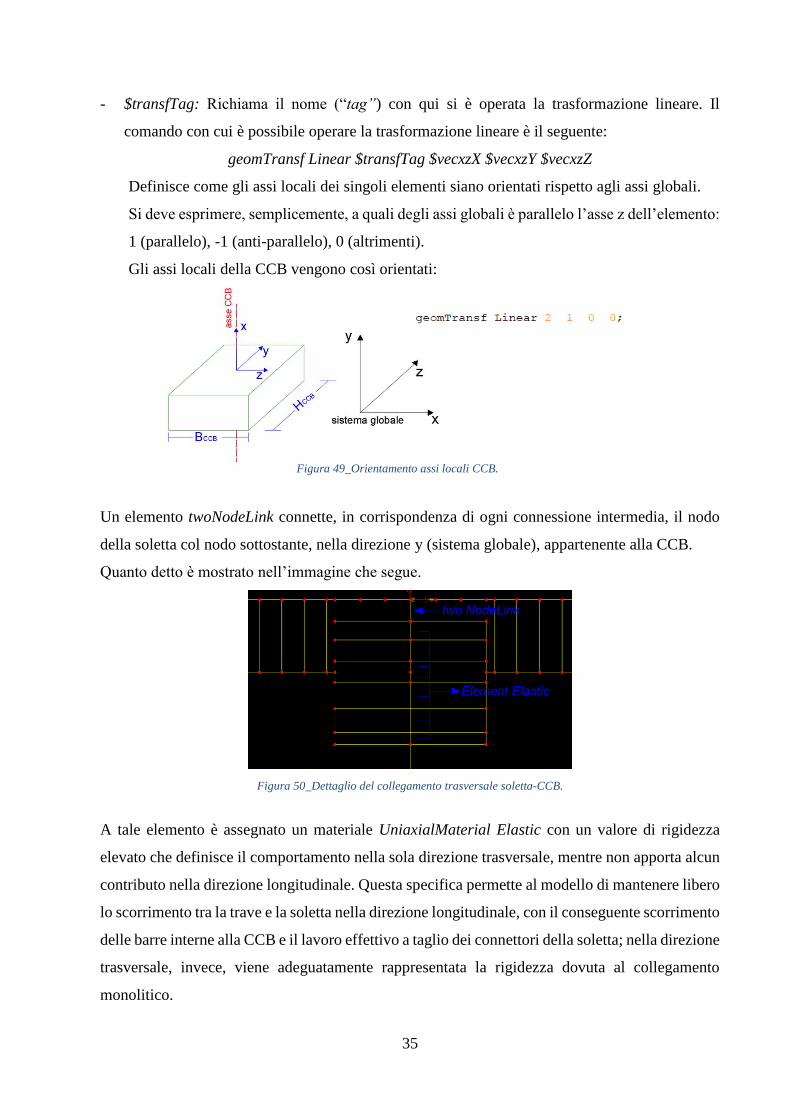
- $transfTag: Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il
comando con cui è possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali della CCB vengono così orientati:
Un elemento twoNodeLink connette, in corrispondenza di ogni connessione intermedia, il nodo
della soletta col nodo sottostante, nella direzione y (sistema globale), appartenente alla CCB.
Quanto detto è mostrato nell’immagine che segue.
Figura 50_Dettaglio del collegamento trasversale soletta-CCB.
A tale elemento è assegnato un materiale UniaxialMaterial Elastic con un valore di rigidezza
elevato che definisce il comportamento nella sola direzione trasversale, mentre non apporta alcun
contributo nella direzione longitudinale. Questa specifica permette al modello di mantenere libero
lo scorrimento tra la trave e la soletta nella direzione longitudinale, con il conseguente scorrimento
delle barre interne alla CCB e il lavoro effettivo a taglio dei connettori della soletta; nella direzione
trasversale, invece, viene adeguatamente rappresentata la rigidezza dovuta al collegamento
monolitico.
Figura 49_Orientamento assi locali CCB.

36
La CCB intermedia è resa solidale, nella direzione trasversale, da elementi elastici con valori
elevati di rigidezza per rappresentare adeguatamente la connessione monolitica trasversale offerta
dalla pila e dalla stessa CCB.
element elasticBeamColumn $eleTag $iNode $jNode $A $E $G $J $Iy $Iz $transfTag
Dove:
- $eleTag Permette di definire il nome dell’elemento;
- $iNode, $jNode: si richiamano i nodi posti all’inizio e alla fine dell’elemento;
- $A: area della sezione dell’elemento;
- $E: modulo di elasticità: 34077 𝑁/𝑚𝑚2;
- $G: modulo di taglio 𝐸 2 ∗ (1 + 𝜈)⁄ ;
- $J: Momento d’inerzia torsionale: Iy + Iz;
- $Iy: Momento d’inerzia rispetto l’asse y;
- $Iz: Momento d’inerzia rispetto l’asse z;
- $transfTag: Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il
comando con cui è possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali della CCB vengono orientati come mostrato in figura. L’immagine mette in
evidenza l’elemento appena descritto.
Figura 51_Dettaglio del collegamento trasversale della CCB intermedia.

37
4.7.1 Dettaglio modellazione CCB
Figura 52_Dettaglio modello 3D connessione DOMI-2 su Opensees.
1. Piastra in acciaio
Le due piastre di acciaio posizionate in testa alle travi e che confinano lateralmente alla
CCB sono modellate come elementi elastici. L’area della sezione differisce tra la parte
superiore più sottile e quella inferiore maggiormente spessa, contenente i fori per il
passaggio delle barre. L’inerzia della sezione è considerata assumendo la reale forma a T
con l’inserzione tra la piastra verticale in testa alla trave e il prolungamento dell’anima
della stessa trave nella connessione. Realisticamente solo la parte inferiore più spessa
manifesta un comportamento rigido, mentre la parte superiore più sottile potrebbe
assumere un comportamento deformabile. Si è comunque deciso di non modellare la non
linearità.
Il comando è lo stesso utilizzato per la modellazione della Concrete Cross Beam,
precedentemente descritta.
2. Concrete Cross Beam
Come già espresso nel capitolo 4 paragrafo 7, la CCB è modellata come un elemento
elastico; si presenta, quindi, come una trave verticale che giace lungo l’asse medio della
connessione ed è collegata inferiormente alla pila. Ad essa compete l’inerzia propria della
sezione in pianta della connessione monolitica di calcestruzzo.
Per riprodurre la resistenza a compressione dovuta alla presenza del calcestruzzo sono
previsti quattro elementi twoNodeLink posizionati al livello superiore e inferiore della CCB
che legano i piatti di acciaio all’asse della CCB, come mostrato in figura 53.

38
Figura 53_Modellazione CCB: twoNodeLink.
Questo comando viene utilizzato per creare un elemento “molla” delimitato da due nodi:
element twoNodeLink $eleTag $iNode $jNode -mat $matTags -dir $dirs
Dove:
- $eleTag permette di definire il nome dell’elemento;
- $iNode, $jNode richiama i nodi posti all’estremità dell’elemento;
- $matTags nome del materiale precedentemente definito. La resistenza del calcestruzzo
a compressione è calcolata considerando la porzione della CCB a contatto con la piastra:
𝐹𝑐 =𝐴𝑝𝑖𝑎𝑠𝑡𝑟𝑎 ∗ 𝑓𝑐
2⁄ = 7470000 𝑁
Dove, 𝑓𝑐 è il valore di resistenza medio del calcestruzzo e si è diviso per due per considerare
simultaneamente il comportamento degli elementi superiori ed inferiori.
- $dirs permette di indicare le direzioni lungo cui è definito il materiale:
o 1,2,3 traslazione lungo gli assi locali x, y e z;
o 4,5,6 rotazione rispetto agli assi locali x, y e z.
3. Barre post-tese
Le quattro barre post-tese presenti nell’area inferiore della CCB, sono modellate come due
elementi truss, ciascuno rappresentativo delle due barre appartenenti allo stesso piano
orizzontale e avente quindi area equivalente pari a 1412 𝑚𝑚2. L’elemento truss per
definizione lavora solamente nella direzione assiale; si definisce col seguente comando:
element truss $eleTag $iNode $jNode $A $matTag
In cui:
- $eleTag permette di definire il nome dell’elemento;
39
- $iNode, $jNode richiama i nodi posti all’estremità dell’elemento;
- $A area della sezione trasversale dell’elemento;
- $matTag nome del materiale precedentemente definito. Il comportamento delle barre è
modellato come il lavoro in serie (uniaxialMaterial Series) di due distinti materiali: uno
rappresentativo dell’acciaio (uniaxialMaterial Steel02) e l’altro (uniaxialMaterial
ElasticPPGap) rappresentativo della sola capacità tensionale di trazione delle barre. Le
barre infatti alloggiano nei fori predisposti della CCB senza che sia garantita aderenza
acciaio-calcestruzzo: per questo il loro lavoro si limita esclusivamente ad uno stato
deformativo di trazione.
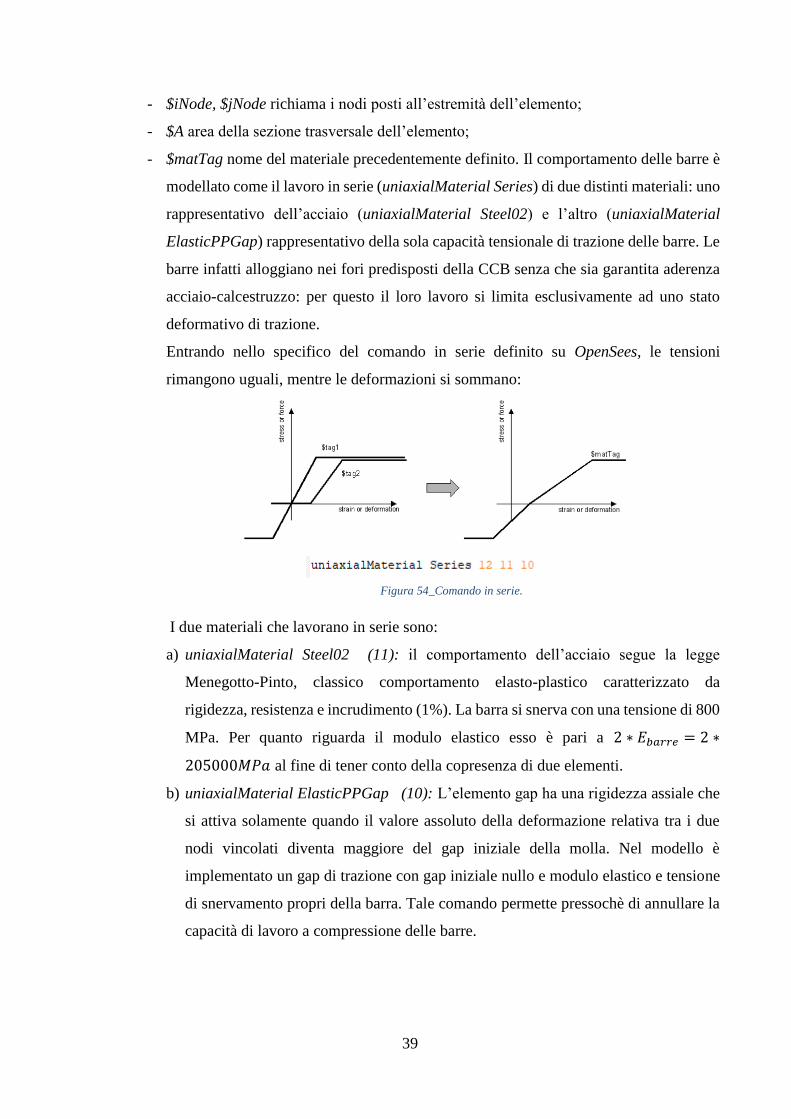
Entrando nello specifico del comando in serie definito su OpenSees, le tensioni
rimangono uguali, mentre le deformazioni si sommano:
I due materiali che lavorano in serie sono:
a) uniaxialMaterial Steel02 (11): il comportamento dell’acciaio segue la legge
Menegotto-Pinto, classico comportamento elasto-plastico caratterizzato da
rigidezza, resistenza e incrudimento (1%). La barra si snerva con una tensione di 800
MPa. Per quanto riguarda il modulo elastico esso è pari a 2 ∗ 𝐸𝑏𝑎𝑟𝑟𝑒 = 2 ∗
205000𝑀𝑃𝑎 al fine di tener conto della copresenza di due elementi.
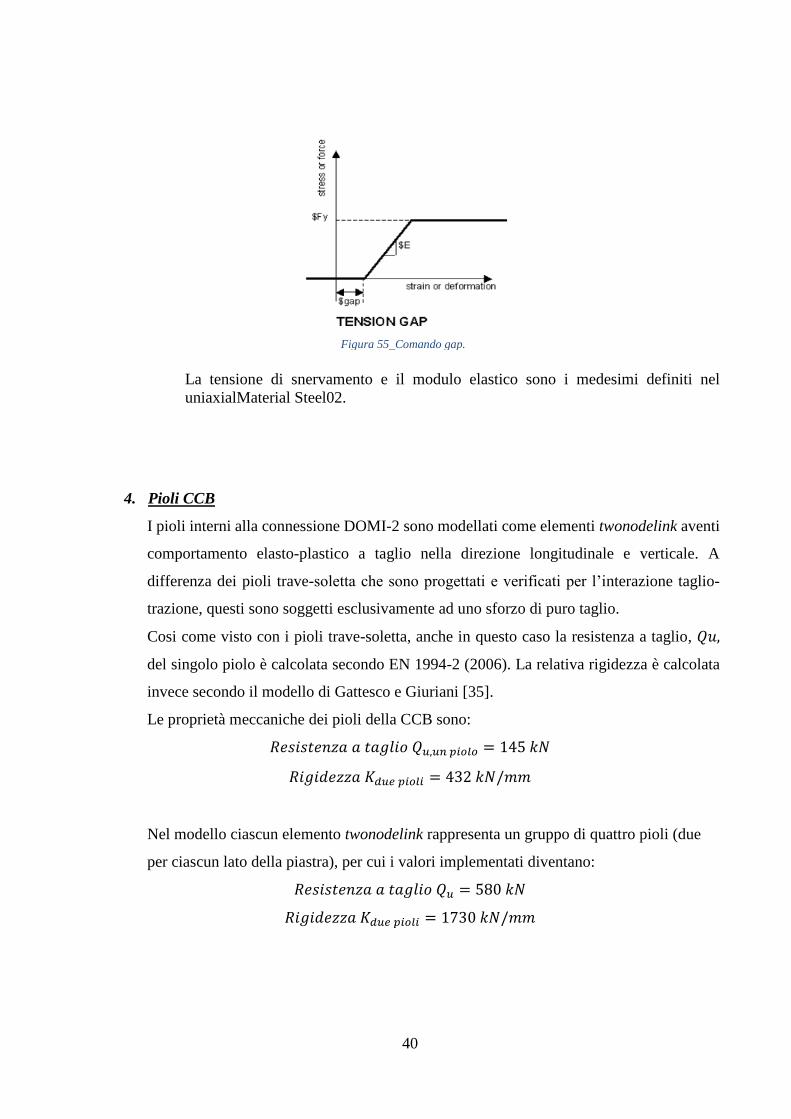
b) uniaxialMaterial ElasticPPGap (10): L’elemento gap ha una rigidezza assiale che
si attiva solamente quando il valore assoluto della deformazione relativa tra i due
nodi vincolati diventa maggiore del gap iniziale della molla. Nel modello è
implementato un gap di trazione con gap iniziale nullo e modulo elastico e tensione
di snervamento propri della barra. Tale comando permette pressochè di annullare la
capacità di lavoro a compressione delle barre.
Figura 54_Comando in serie.
40
La tensione di snervamento e il modulo elastico sono i medesimi definiti nel
uniaxialMaterial Steel02.
4. Pioli CCB
I pioli interni alla connessione DOMI-2 sono modellati come elementi twonodelink aventi
comportamento elasto-plastico a taglio nella direzione longitudinale e verticale. A
differenza dei pioli trave-soletta che sono progettati e verificati per l’interazione taglio-
trazione, questi sono soggetti esclusivamente ad uno sforzo di puro taglio.
Cosi come visto con i pioli trave-soletta, anche in questo caso la resistenza a taglio, 𝑄𝑢,
del singolo piolo è calcolata secondo EN 1994-2 (2006). La relativa rigidezza è calcolata
invece secondo il modello di Gattesco e Giuriani [35].
Le proprietà meccaniche dei pioli della CCB sono:
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑎 𝑡𝑎𝑔𝑙𝑖𝑜 𝑄𝑢,𝑢𝑛 𝑝𝑖𝑜𝑙𝑜 = 145 𝑘𝑁
𝑅𝑖𝑔𝑖𝑑𝑒𝑧𝑧𝑎 𝐾𝑑𝑢𝑒 𝑝𝑖𝑜𝑙𝑖 = 432 𝑘𝑁/𝑚𝑚
Nel modello ciascun elemento twonodelink rappresenta un gruppo di quattro pioli (due
per ciascun lato della piastra), per cui i valori implementati diventano:
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑎 𝑡𝑎𝑔𝑙𝑖𝑜 𝑄𝑢 = 580 𝑘𝑁
𝑅𝑖𝑔𝑖𝑑𝑒𝑧𝑧𝑎 𝐾𝑑𝑢𝑒 𝑝𝑖𝑜𝑙𝑖 = 1730 𝑘𝑁/𝑚𝑚
Figura 55_Comando gap.

41
4.8 Modellazione pila
La pila è modellata usando degli elementi non lineari, con sezione discretizzata in fibre, definiti
lungo l’asse dell’elemento. Essa è modellata attraverso due elementi aventi sezione differente: la
sezione alla base è maggiormente armata rispetto alla sezione in sommità.
Come già accennato precedentemente, il nodo alla base è vincolato per tutti i 6 gradi di libertà.
Il comando utilizzato per la modellazione della soletta è il seguente:
element nonlinearBeamColumn $eletag $iNode $jNode $numIngrPts $secTag $transtag
Dove:
$eletag:
Permette di definire il nome dell’elemento.
$iNode & $jNode:
Si richiamano i nodi posti all’inizio e alla fine dell’elemento.
$numIngrPts:
Numero di punti d’integrazione lungo l’elemento; posto pari a tre.
$secTag:
Permette di identificare l’oggetto Sezione definito in precedenza.
Il comportamento meccanico dell’acciaio (B450C) e del calcestruzzo (C 35/45) sono modellati,
rispettivamente, mediante il modello Menegotto-Pinto e Kent-Park.
Tali comportamenti sono riproposti attraverso i seguenti comandi:
uniaxialMaterial Concrete01 $matTag $fpc $epsc0 $fpcu $epsU
- $matTag nome assegnato al materiale: 1;
- $fpc compressione a 28 giorni: −43 𝑁/𝑚𝑚2;
Figura 56_Modello Menegotto-Pinto (sx); modello Kent and Park (dx).
42
- $epsc0 deformazione relativa alla massima compressione: −0.002;
- $fpcu resistenza ultima a compressione: −34 𝑁/𝑚𝑚2;
- $epsU deformazione ultima: −0.006.
N.B.: In ambiente Opensees la compressione è negativa.
uniaxialMaterial Steel02 $matTag $Fy $E $b $R0 $cR1 $cR2
- $matTag nome assegnato al materiale 9;
- $Fy tensione di snervamento: 500 𝑁/𝑚𝑚2;
- $E modulo elastico: 205000 𝑁/𝑚𝑚2;
- $b incrudimento: 0.005;
- $R0, $cR1, $cR2 parametri per controllare la transizione dal ramo elastico a quello plastico:
$R0=18; $cR1=0.925; $cR2 =0.15.
Come già accennato precedentemente la sezione viene discretizzata in fibre attraverso il comando:
section Fiber $secTag {
Questo comando consente all’utente di costruire un oggetto FiberSection. Ogni oggetto
FiberSection è composto da fibre, ciascuna fibra contenente un materiale uniassiale, un'area e una
posizione (y, z). Il comando per generare l'oggetto FiberSection contiene in {} i comandi per
generare tutte le fibre nell'oggetto.
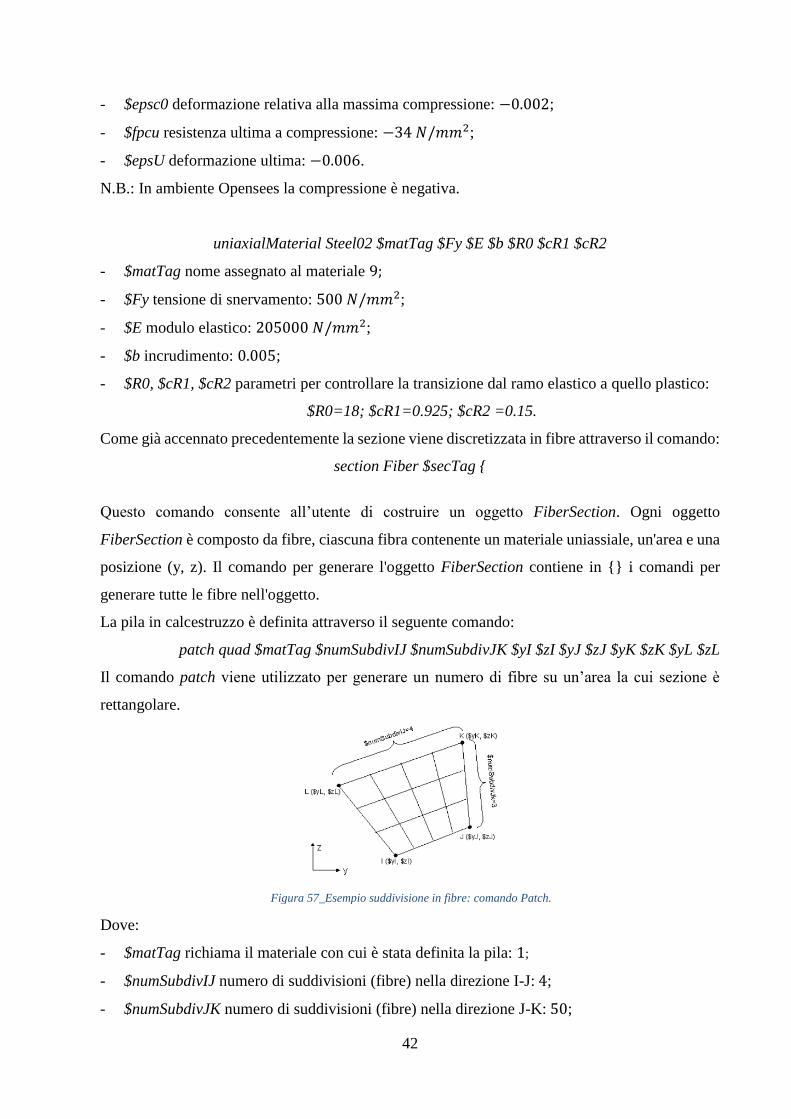
La pila in calcestruzzo è definita attraverso il seguente comando:
patch quad $matTag $numSubdivIJ $numSubdivJK $yI $zI $yJ $zJ $yK $zK $yL $zL
Il comando patch viene utilizzato per generare un numero di fibre su un’area la cui sezione è
rettangolare.
Dove:
- $matTag richiama il materiale con cui è stata definita la pila: 1;
- $numSubdivIJ numero di suddivisioni (fibre) nella direzione I-J: 4;
- $numSubdivJK numero di suddivisioni (fibre) nella direzione J-K: 50;
Figura 57_Esempio suddivisione in fibre: comando Patch.
43
- $yI, $zI, $yJ, $zJ, $yK, $zK, $yL, $zL coordinate dei quattro vertici.
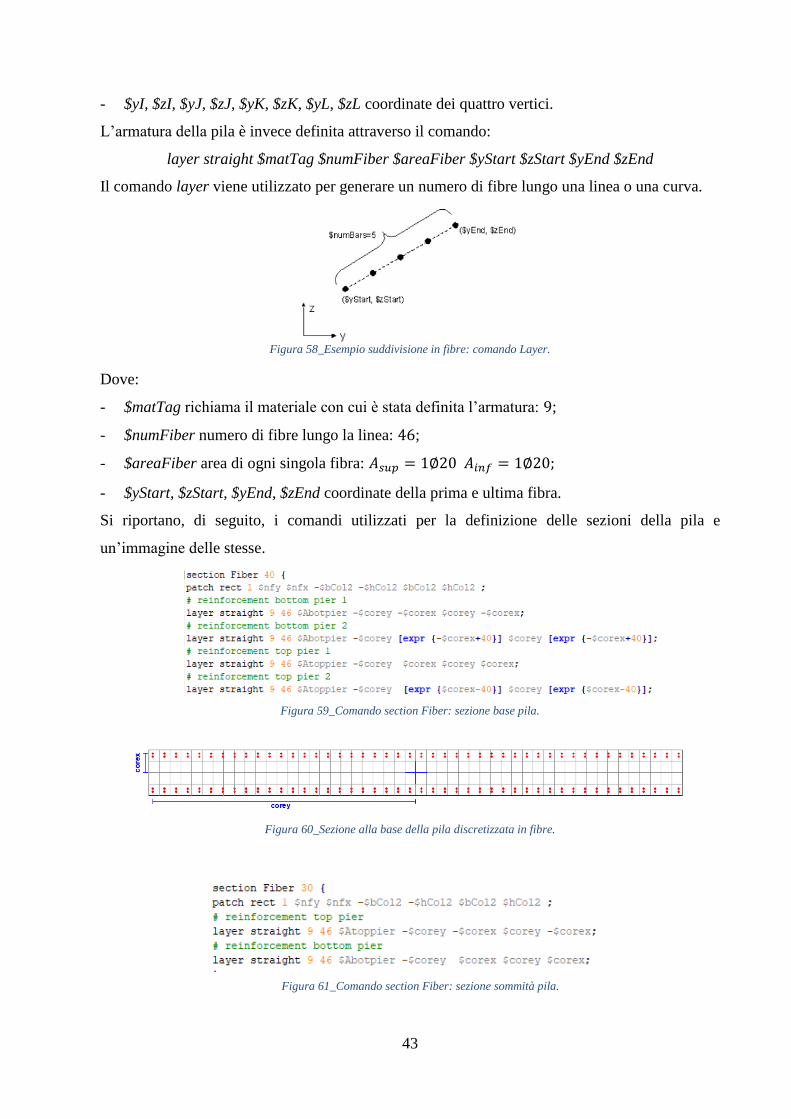
L’armatura della pila è invece definita attraverso il comando:
layer straight $matTag $numFiber $areaFiber $yStart $zStart $yEnd $zEnd
Il comando layer viene utilizzato per generare un numero di fibre lungo una linea o una curva.
Figura 58_Esempio suddivisione in fibre: comando Layer.
Dove:
- $matTag richiama il materiale con cui è stata definita l’armatura: 9;
- $numFiber numero di fibre lungo la linea: 46;
- $areaFiber area di ogni singola fibra: 𝐴𝑠𝑢𝑝 = 1∅20 𝐴𝑖𝑛𝑓 = 1∅20;
- $yStart, $zStart, $yEnd, $zEnd coordinate della prima e ultima fibra.
Si riportano, di seguito, i comandi utilizzati per la definizione delle sezioni della pila e
un’immagine delle stesse.
Figura 59_Comando section Fiber: sezione base pila.
Figura 60_Sezione alla base della pila discretizzata in fibre.
Figura 61_Comando section Fiber: sezione sommità pila.

44
Figura 62_Sezione alla sommità della pila discretizzata in fibre.
La sezione così definita tiene conto della flessione e del taglio ma non della torsione. E’ necessario,
quindi, introdurre il comando “Section Aggregator” che aggiunge alla resistenza flessionale e a
taglio della pila (sezione 30 & 40) anche la resistenza torsionale.
section Aggregator $secTag $matTag1 $dof1 -section $sectionTag
Dove:
- $secTag permette di assegnare il nome alla sezione che si sta definendo;
- $matTag1 permette di richiamare il nome di un materiale precedentemente definito a cui si è
assegnata la resistenza torsionale:
uniaxialMaterial Elastic 120 [expr {$Gc*$Is}];
𝐺𝑐 ∗ 𝐼𝑠 = 𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙𝑒 𝑝𝑖𝑙𝑎;
𝐺𝑐 =𝐸𝑐
2 ∗ (1 + 𝜈) = 𝑀𝑜𝑑𝑢𝑙𝑜 𝑑𝑖 𝑡𝑎𝑔𝑙𝑖𝑜 𝑝𝑖𝑙𝑎;
𝐼𝑠 = 𝐼𝑥 + 𝐼𝑦 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑′𝑖𝑛𝑒𝑟𝑧𝑎 𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙𝑒 𝑝𝑖𝑙𝑎.
- $dof1 permette di definire la sollecitazione che deve essere modellata da tale sezione: 𝑇 ;
- $sectionTag sezione a cui si vuole assegnare la resistenza torsionale: soletta (sezione 30 &40);
In conclusione, il comando che racchiude la modellazione delle due sezione è il seguente:
Figura 63_Section Aggregator pila: sezione alla base e in sommità.
$transtag:
Richiama il nome (“tag”) con qui si è operata la trasformazione lineare. Il comando con cui è
possibile operare la trasformazione lineare è il seguente:
geomTransf Linear $transfTag $vecxzX $vecxzY $vecxzZ
Definisce come gli assi locali dei singoli elementi siano orientati rispetto agli assi globali.
Si deve esprimere, semplicemente, a quali degli assi globali è parallelo l’asse z dell’elemento:
1 (parallelo), -1 (anti-parallelo), 0 (altrimenti).
Gli assi locali della pila vengono così orientati:

45
A titolo di esempio si riporta la modellazione dei due elementi costituenti la pila.
Figura 64_Assi locali pila.
Figura 65_Modellazione pila.

46
5. Analisi statica non lineare
Diverse sono le analisi, in ambiente OpenSees, che si possono svolgere sul modello. A titolo di
esempio si espongono gli steps e i risultati ottenuti al seguito di un’analisi statica non lineare.
5.1 Definizione e applicazione dei carichi
1) Peso proprio trave: Considerando un peso specifico dell’acciaio strutturale di
78.5 𝑘𝑁/𝑚3 e un’area pari a 0.027𝑚2, si ottiene un carico al metro lineare di:
78.5 𝑘𝑁/𝑚3 ∗ 0.027 𝑚2 = 2.1195 𝑘𝑁/𝑚
Considerando un incremento del 5% al fine di tenere in conto delle connessioni, pioli,
pittura etc. si ha:
𝑄𝑡𝑟𝑎𝑣𝑒 = 2.225 𝑘𝑁/𝑚
Il peso proprio della trave viene implementato come una forza puntuale agente sui nodi
della stessa. Segue un esempio:
Carico di tipo lineare il cui “tag” è 1 agente sul nodo 1017 diretto in direzione opposta
rispetto all’asse globale y. Il carico, espresso in 𝑁/𝑚𝑚, viene moltiplicato per 𝐿𝑔𝑖𝑟 =
4000𝑚𝑚, ovvero per l’interasse tra i nodi.
2) Carichi soletta strutturali e non: Considerando un peso specifico del calcestruzzo di
25 𝑘𝑁/𝑚3 e un’area pari a 0.25𝑚 ∗ 2.65𝑚 = 0.6625𝑚2, si ottiene un carico al metro
lineare di:
𝑄𝑠𝑜𝑙𝑒𝑡𝑡𝑎 = 25 𝑘𝑁/𝑚3 ∗ 0.6625 𝑚2 = 16.563 𝑘𝑁/𝑚
Al fine di tener presente di altri componenti della soletta, quali ad esempio le predalles, si
considera un carico extra di 1.25 𝑘𝑁/𝑚2, corrispondente ad uno spessore aggiuntivo di 5
cm:
𝑄𝑒𝑥𝑡𝑟𝑎 = 25 𝑘𝑁/𝑚3 ∗ 0.05 𝑚 ∗ 2.65 𝑚 = 3.313 𝑘𝑁/𝑚
Figura 66_Applicazione peso proprio trave.

47
Bisogna, inoltre, considerare i carichi non strutturali portati dalla soletta, quali:
o 𝑄𝑎𝑠𝑙𝑓𝑎𝑙𝑡𝑜 = 𝛾𝑎𝑠𝑓𝑎𝑙𝑡𝑜 ∗ 𝐴𝑎𝑠𝑙𝑓𝑎𝑙𝑡𝑜 = 3.9 𝑘𝑁/𝑚;
o 𝑄𝑚𝑎𝑟𝑐𝑖𝑎𝑝𝑖𝑒𝑑𝑒 = 𝛾𝑚𝑎𝑟𝑐𝑖𝑎𝑝𝑖𝑒𝑑𝑒 ∗ 𝐴𝑚𝑎𝑟𝑐𝑖𝑎𝑝𝑖𝑒𝑑𝑒 = 7.40 𝑘𝑁/𝑚;
o 𝑄𝑏𝑎𝑟𝑟𝑖𝑒𝑟𝑒 𝑑𝑖 𝑠𝑖𝑐𝑢𝑟𝑒𝑧𝑧𝑎 = 0.65 𝑘𝑁/𝑚;
o 𝑄𝑏𝑎𝑟𝑟𝑖𝑒𝑟𝑒 𝑑𝑖 𝑠𝑖𝑐𝑢𝑟𝑒𝑧𝑧𝑎 𝑝𝑒𝑟 𝑖 𝑝𝑒𝑑𝑜𝑛𝑖 = 0.20 𝑘𝑁/𝑚;
Dunque, il carico totale portato dalla soletta risulta essere:
𝑄𝑠𝑜𝑙𝑒𝑡𝑡𝑎,𝑇𝑂𝑇 = 32.072 𝑘𝑁/𝑚
Questo viene applicato su ogni elemento non lineare costituente la soletta nella seguente
maniera:
Carico lineare (“tag” 1) uniformemente distribuito sull’elemento (“tag” 1) ed agente in
direzione opposta rispetto all’asse locale y. I carichi agenti in direzione x e z, in tal caso,
sono nulli.
3) Peso proprio CCB intermedia: Considerando un peso specifico del calcestruzzo di
25 𝑘𝑁/𝑚3 e un’area pari a 0.90𝑚 ∗ 2.65𝑚 = 2.385𝑚2, si ottiene un carico al metro
lineare di:
𝑄𝐶𝐶𝐵,𝑖𝑛𝑡𝑒𝑟𝑚𝑒𝑑𝑖𝑎 = 25 𝑘𝑁/𝑚3 ∗ 2.385 𝑚2 = 59.625 𝑘𝑁/𝑚
Questo viene applicato con le medesime modalità con cui si implementa il carico sulla
soletta:
Carico uniformemente distribuito sull’elemento 4001 e agente parallelamente all’asse
locale z.
Figura 67_Applicazione carichi strutturali e non della soletta.
Figura 68_Applicazione peso proprio CCB intermedia.
48
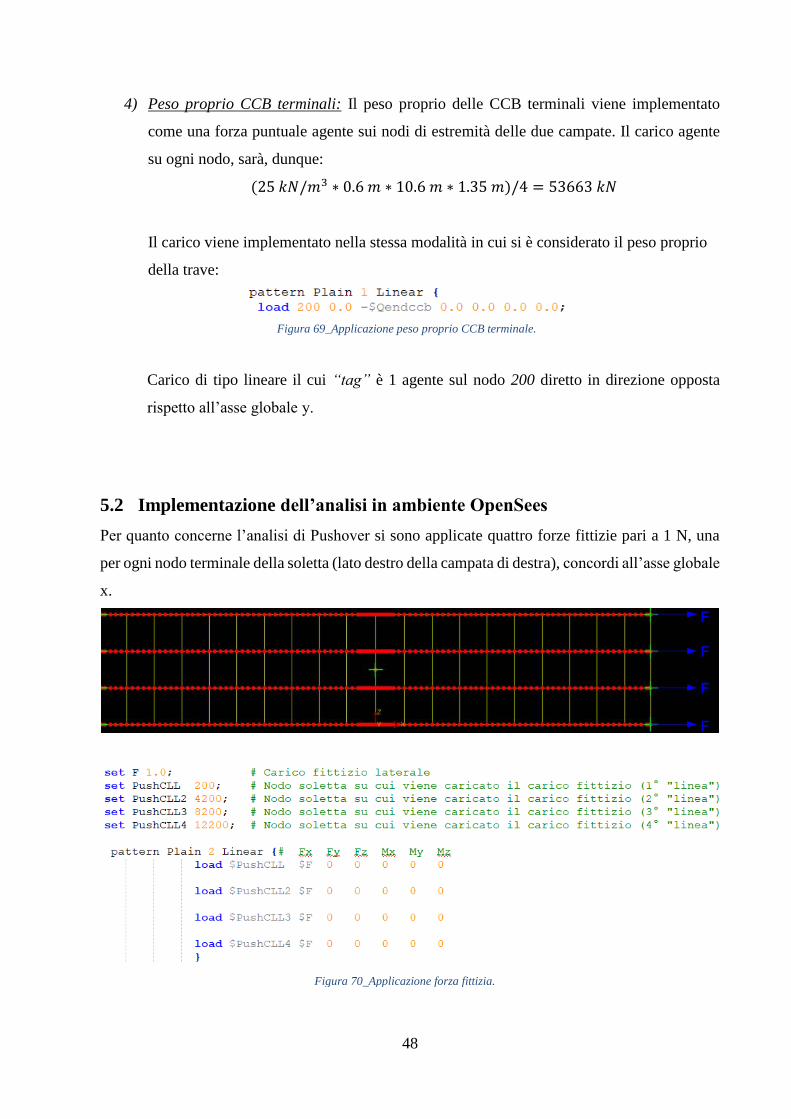
4) Peso proprio CCB terminali: Il peso proprio delle CCB terminali viene implementato
come una forza puntuale agente sui nodi di estremità delle due campate. Il carico agente
su ogni nodo, sarà, dunque:
(25 𝑘𝑁/𝑚3 ∗ 0.6 𝑚 ∗ 10.6 𝑚 ∗ 1.35 𝑚)/4 = 53663 𝑘𝑁
Il carico viene implementato nella stessa modalità in cui si è considerato il peso proprio
della trave:
Carico di tipo lineare il cui “tag” è 1 agente sul nodo 200 diretto in direzione opposta
rispetto all’asse globale y.
5.2 Implementazione dell’analisi in ambiente OpenSees
Per quanto concerne l’analisi di Pushover si sono applicate quattro forze fittizie pari a 1 N, una
per ogni nodo terminale della soletta (lato destro della campata di destra), concordi all’asse globale
x.
Figura 69_Applicazione peso proprio CCB terminale.
Figura 70_Applicazione forza fittizia.
49
Per implementare l’analisi, infine, è necessario definire i seguenti comandi:
1. Constrains Command: Questo comando è usato per costruire l'oggetto ConstraintHandler.
L'oggetto ConstraintHandler determina come vengono applicate
le equazioni dei vincoli nell'analisi. Quello che segue è il comando
per costruire un gestore dei vincoli (ConstraintHandler) semplice:
constraints Plain
2. Numberer Command: Questo comando viene utilizzato per costruire l'oggetto
DOF_Numberer. L'oggetto DOF_Numberer determina la
mappatura tra il numero di equazioni e gradi di libertà - come
sono numerati i gradi di libertà. Si costruisce un numeratore
RCM che usa lo schema inverso di Cuthill-McKee per ordinare
le equazioni matriciali:
numberer RCM
3. System Command: Questo comando viene utilizzato per costruire gli oggetti LinearSOE e
LinearSolver per archiviare e risolvere il sistema di equazioni
nell'analisi. Quello che segue è il comando per costruire un sistema di
equazioni lineari BandSPDSOE:
system BandSPD
Come suggerisce il nome, questa classe viene utilizzata per sistemi di
matrici positive definite simmetriche.
4. Test Command: Questo comando è usato per costruire un oggetto ConvergenceTest. Alcuni
oggetti SolutionAlgorithm richiedono un oggetto ConvergenceTest per
determinare se la convergenza è stata raggiunta alla fine di un step di
iterazione. Il test di convergenza viene applicato all'equazione della
matrice, AX = B memorizzata nel LinearSOE. Quello che segue è il
comando per costruire un test di convergenza:
test NormDispIncr $tol $iter
Dove:
- $tol esprime i criteri di tolleranza usati per verificare la convergenza.
In tal caso vale 1e−9;

50
- $iter esprime il numero massimo di iterazioni da controllare prima
di restituire errore: 100.
5. Algorithm Command: Questo comando viene utilizzato per costruire un oggetto
SolutionAlgorithm, che determina la sequenza di passaggi
necessari per risolvere l'equazione non lineare. Quello che segue
è il comando per costruire l’algoritmo:
algorithm Newton
Questo comando usa il metodo di Newton-Raphson per risolvere
le equazioni non lineari. Il metodo di Newton-Raphson è il più
utilizzato e il più robusto per risolvere equazioni algebriche non
lineari.
6. Integrator Command: Questo comando viene utilizzato per costruire l’oggetto Integrator,
che determina il significato dei termini delle equazioni. In tal caso,
il comando Integrator utilizzato è il seguente:
integrator DisplacementControl $node $dof $incr $numIter $ΔUmin $ΔUmax
Dove:
- $node: nodo la cui risposta controlla la soluzione: nodo 4200 (nodo
appartenente alla soletta della seconda trave, estremità destra della
campata di destra);
- $dof: grado di libertà del nodo su cui si opera il controllo dello
spostamento: direzione x del sistema di riferimento globale;
- $incr: incremento dello spostamento: dU=5mm;
- $numIter: numero di iterazione dell’algoritmo. Default = 1;
- $ΔUmin: dimensione del passo minimo di spostamento: dU=5mm;
- $ΔUmax: dimensione del passo massimo di spostamento: dU=5mm.
7. Analysis Command: Questo comando viene utilizzato per definire l’oggetto Analysis, che
definisce il tipo di analisi da eseguire. Nel caso in esame si opera
un’analisi statica:
analysis Static
51
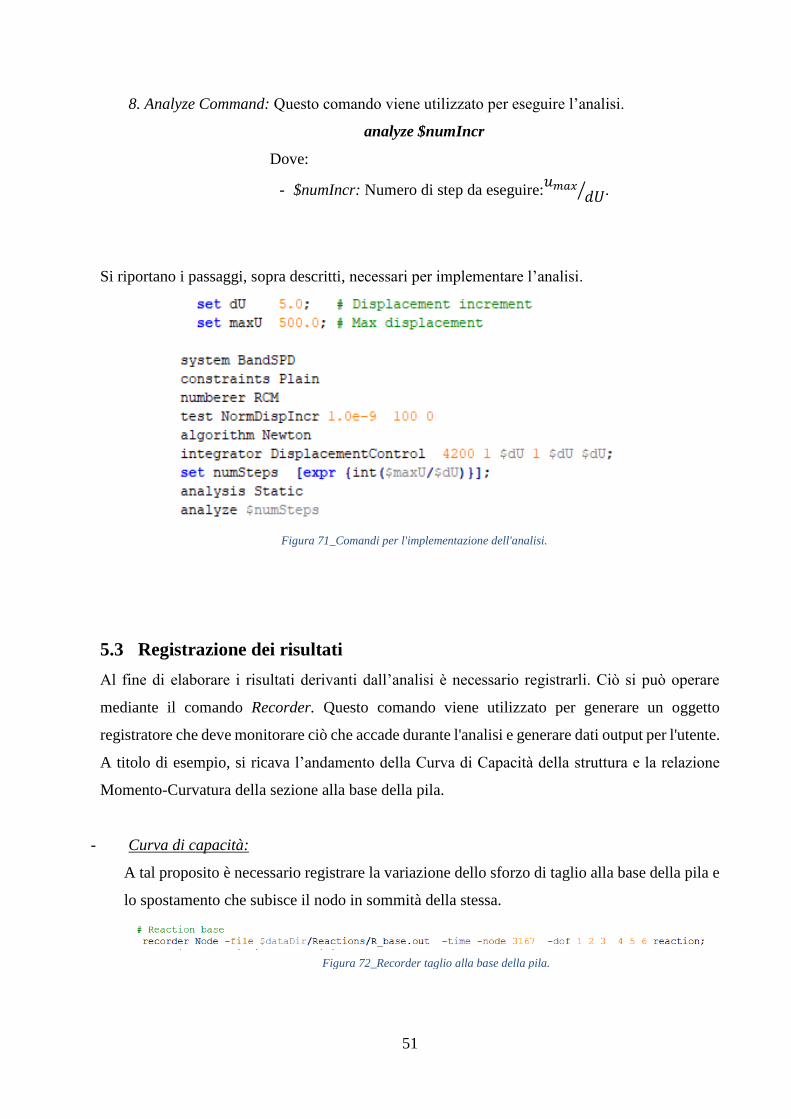
8. Analyze Command: Questo comando viene utilizzato per eseguire l’analisi.
analyze $numIncr
Dove:
- $numIncr: Numero di step da eseguire:𝑢𝑚𝑎𝑥
𝑑𝑈⁄ .
Si riportano i passaggi, sopra descritti, necessari per implementare l’analisi.
5.3 Registrazione dei risultati
Al fine di elaborare i risultati derivanti dall’analisi è necessario registrarli. Ciò si può operare
mediante il comando Recorder. Questo comando viene utilizzato per generare un oggetto
registratore che deve monitorare ciò che accade durante l'analisi e generare dati output per l'utente.
A titolo di esempio, si ricava l’andamento della Curva di Capacità della struttura e la relazione
Momento-Curvatura della sezione alla base della pila.
- Curva di capacità:
A tal proposito è necessario registrare la variazione dello sforzo di taglio alla base della pila e
lo spostamento che subisce il nodo in sommità della stessa.
Figura 71_Comandi per l'implementazione dell'analisi.
Figura 72_Recorder taglio alla base della pila.
52
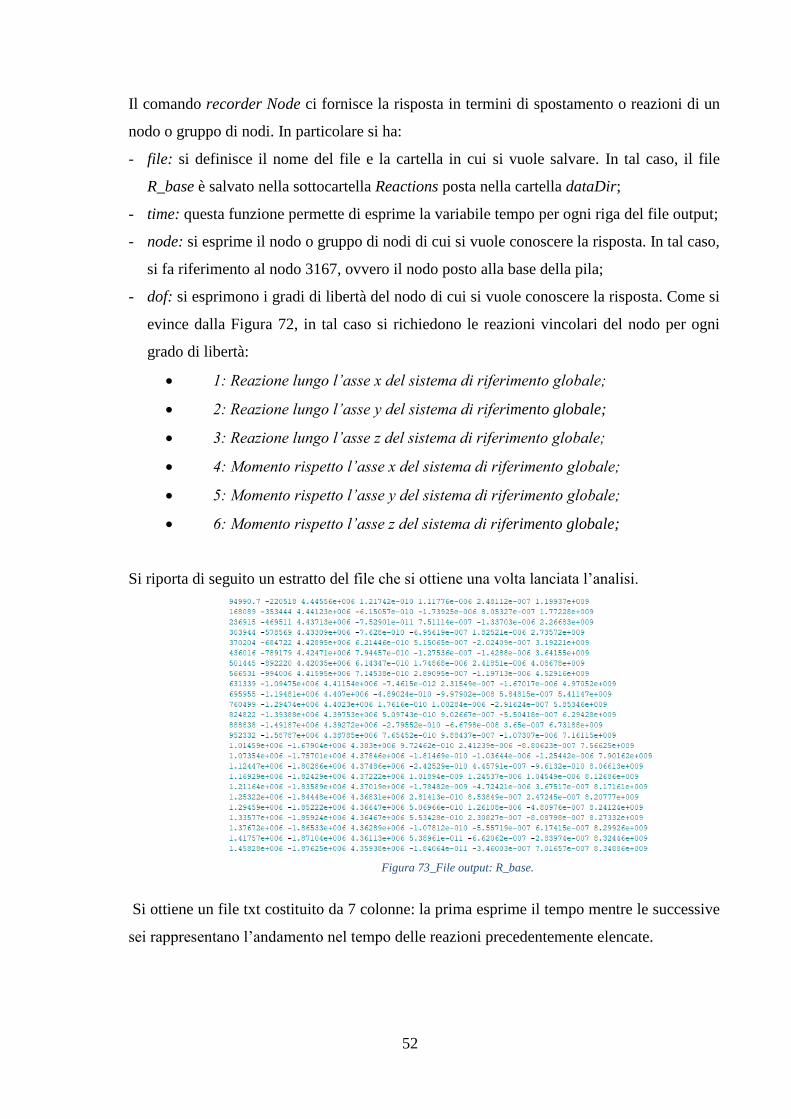
Il comando recorder Node ci fornisce la risposta in termini di spostamento o reazioni di un
nodo o gruppo di nodi. In particolare si ha:
- file: si definisce il nome del file e la cartella in cui si vuole salvare. In tal caso, il file
R_base è salvato nella sottocartella Reactions posta nella cartella dataDir;
- time: questa funzione permette di esprime la variabile tempo per ogni riga del file output;
- node: si esprime il nodo o gruppo di nodi di cui si vuole conoscere la risposta. In tal caso,
si fa riferimento al nodo 3167, ovvero il nodo posto alla base della pila;
- dof: si esprimono i gradi di libertà del nodo di cui si vuole conoscere la risposta. Come si
evince dalla Figura 72, in tal caso si richiedono le reazioni vincolari del nodo per ogni
grado di libertà:
• 1: Reazione lungo l’asse x del sistema di riferimento globale;
• 2: Reazione lungo l’asse y del sistema di riferimento globale;
• 3: Reazione lungo l’asse z del sistema di riferimento globale;
• 4: Momento rispetto l’asse x del sistema di riferimento globale;
• 5: Momento rispetto l’asse y del sistema di riferimento globale;
• 6: Momento rispetto l’asse z del sistema di riferimento globale;
Si riporta di seguito un estratto del file che si ottiene una volta lanciata l’analisi.
Si ottiene un file txt costituito da 7 colonne: la prima esprime il tempo mentre le successive
sei rappresentano l’andamento nel tempo delle reazioni precedentemente elencate.
Figura 73_File output: R_base.

53
Allo stesso modo si registra lo spostamento che subisce il nodo alla sommità della pila:
Le differenze rispetto al recorder Node sopra descritto sono:
- Il file Disp_N3168.out viene salvato nella sottocartella Drift;
- Si fa riferimento al nodo in sommità della pila: 3168;
- Si esprimono i gradi di libertà del nodo di cui si vuole conoscere la risposta. Come si evince
dalla Figura 77, in tal caso si richiedono gli spostamenti/rotazioni del nodo per ogni grado
di libertà:
• 1: Spostamento lungo l’asse x del sistema di riferimento globale;
• 2: Spostamento lungo l’asse y del sistema di riferimento globale;
• 3: Spostamento lungo l’asse z del sistema di riferimento globale;
• 4: Rotazione rispetto l’asse x del sistema di riferimento globale;
• 5: Rotazione rispetto l’asse y del sistema di riferimento globale;
• 6: Rotazione rispetto l’asse z del sistema di riferimento globale;
Si riporta di seguito un estratto del file che si ottiene una volta lanciata l’analisi.
Si ottiene un file txt costituito da 7 colonne: la prima esprime il tempo mentre le successive
sei rappresentano l’andamento nel tempo degli spostamenti o rotazioni precedentemente
elencate.
Figura 74_Recorder spostamento nodo sommità pila.
Figura 75_File output Disp_N3168.

54
- Momento – Curvatura:
A tal proposito è necessario registrare la variazione del momento flettente e della curvatura
nella sezione posta alla base della pila.
Figura 76_Recorder: momento flettente sezione alla base pila.
Il comando recorder Element ci fornisce la risposta in termini di deformazioni o sollecitazioni
di un elemento o gruppo di elementi. In particolare si ha:
- file: si definisce il nome del file e la cartella in cui si vuole salvare. In tal caso, il file
Force4007_sec1 è salvato nella sottocartella Pier posta nella cartella dataDir;
- time: questa funzione permette di esprime la variabile tempo per ogni riga del file output;
- ele: si esprime l’elemento o gruppo di elementi di cui si vuole conoscere la risposta. In tal
caso, si fa riferimento all’elemento 4007 che collega il nodo alla base della pila con quello
in mezzeria della stessa;
- Section: si esprime la sezione di cui si vuole conoscere l’andamento del momento. Come
si evince dalla figura 77, ogni elemento pila presenta due sezioni; ciò che ci interessa è la
sezione alla base, di conseguenza scriveremo 1.
- $RespType: si esprime, infine, il tipo di risposta che si sta indagando. In tal caso, poiché ci
interessano le sollecitazioni ed in particolar modo il momento flettente scriviamo: force.
Figura 77_Elemento pila.
55
Si riporta di seguito un estratto del file di output che si ottiene una volta lanciata l’analisi.
Figura 78_File output: Force4007_sec1.
Si ottiene un file txt costituito da cinque colonne:
- 1° colonna: tempo;
- 2° colonna: Forza rispetto l’asse y del sistema di riferimento locale;
- 3° colonna: Forza rispetto l’asse z del sistema di riferimento locale;
- 4° colonna: Momento rispetto l’asse y del sistema di riferimento locale;
- 5° colonna: Momento rispetto l’asse y del sistema di riferimento locale.
Allo stesso modo si registra la deformazione che subisce l’elemento alla base:
Figura 79_Recorder curvatura sezione alla base della pila.
Valgono le stesse considerazioni sopra fatte. In tal caso, rispetto al recorder Element
precedente, varia il nome del file (Def4007_sec1.out) e il tipo di risposta che non sarà più force
bensì deformation. Si riporta di seguito un estratto del file di output che si ottiene una volta
lanciata l’analisi.
Figura 80_File output: Def4007_sec1.

56
5.4 Elaborazione dei dati di output
I file di output vengono elaborati mediante il software Matlab, che permette di graficare la Curva
di Capacità della struttura e la relazione Momento – Curvatura della sezione alla base della pila.
- Curva di Capacità:
Si riporta la procedura svolta in Matlab per ottenere la Curva di Capacità.
Figura 81_Procedura Matlab per la definizione della Curva di Capacità.
Di seguito si illustrano i passaggi svolti:
• Riga 12: Si carica il file Disp_N3168 che fornisce gli spostamenti e le rotazioni del nodo
in sommità della pila rispetto agli assi del sistema globale;
• Riga 13: Si estrae dal file la seconda colonna, ovvero, quella che esprime lo spostamento
del nodo lungo l’asse x del sistema globale;
• Riga 15: Si carica il file R_base che fornisce le reazioni del nodo alla base della pila;
• Riga 16: Si estrae dal file la seconda colonna, ovvero, quella che esprime lo sforzo di taglio
lungo l’asse x del sistema di riferimento globale;
• Riga 18-23: Si grafica la Curva di Capacità:
Figura 82_Curva di Capacità.

57
Come si evince dalla Figura 82, il legame Forza-spostamento è caratterizzato da un iniziale
comportamento elastico lineare fino alla soglia di snervamento, seguito da un comportamento
post-elastico non lineare incrudente. Lo snervamento si ha per uno spostamento di circa 75
mm a cui corrisponde un valore di taglio alla base della pila di 1800 kN.
- Momento - Curvatura base pila:
Si riporta la procedura svolta in Matlab per ottenere la curva Momento - Curvatura.
Figura 83_Procedura Matlab per la definizione della curva Momento-Curvatura.
Di seguito si illustrano i passaggi svolti:
• Riga 64: Si carica il file Force4007_sec2 che fornisce le sollecitazioni agenti sull’elemento
della pila rispetto agli assi del sistema locale;
• Riga 65: Si estrae dal file la quarta colonna, ovvero, quella che esprime il momento rispetto
l’asse y del sistema locale;
• Riga 67: Si carica il file Def4007_sec2 che fornisce le deformazioni dello stesso elemento;
• Riga 68: Si estrae dal file la quarta colonna, ovvero, quella che esprime la curvatura
rispetto l’asse y del sistema locale;
• Riga 70-77: Si grafica la curva Momento – Curvatura:
Figura 84_Momento-Curvatura sezione base pila.

58
Come si evince dalla Figura 83, la sezione alla base della pila si plasticizza per un valore della
curvatura pari circa a 0.00664 1/m a cui corrisponde un Momento flettente di 7900 kNm.
Questi sono stati confrontati con i valori forniti dal software VcaSlu rappresentati nel grafico
mediante un cerchio rosso. Come si evince dalla figura, i valori ottenuti attraverso i due
software non differiscono tra loro di molto.