motor dc
TRANSCRIPT

KONTRAK KULIAHTTL KLS A
TUGAS : 40% (T. KLPK & MANDIRI)
QUIS : 10 %
UTS : 10 %
UAS : 40%
Syarat tatap muka 80% dari kehadiran
SILABUS: Tugas buat karakteristik motor 25-9-2012
1. MESIN ARUS SEARAH (DAPAT DIFUNGSIKAN SBG MOTOR & PEMBANGKIT)
2. MESIN ARUS BOLAK BALIK(DAPAT DIFUNGSIKAN SBG MOTOR & PEMBANGKIT)
3. TRANSFORMATOR (UTK MENAIKKAN ATAU MENURUNKAN TEGANGAN LISTRIK)
KONTRAK KULIAHTTL KLS B
TUGAS : 40 % (T. KLPK & MANDIRI)
QUIS : 10 %
UTS : 10 %
UAS : 40%
Syarat tatap muka 80% dari kehadiran
SILABUS:
1. MESIN ARUS SEARAH (DAPAT DIFUNGSIKAN SBG MOTOR & PEMBANGKIT)
2. MESIN ARUS BOLAK BALIK(DAPAT DIFUNGSIKAN SBG MOTOR & PEMBANGKIT)
3. TRANSFORMATOR (UTK MENAIKKAN ATAU MENURUNKAN TEGANGAN LISTRIK)
GRADE NILAI TTL
• 81 SD 100 : A
• 66 SD 80 : B
• 56 SD 65 : C
• 46 SD 55 : D
• 0 SD 45 : E

KONTRAK KULIAHTEKNIK TENAGA LISTRIK KLS C
TUGAS : 30% (T. KLPK & MANDIRI)
QUIS : 15%
UTS : 15%
UAS : 40%
Syarat tatap muka 80% dari kehadiran
SILABUS:
1. MESIN ARUS SEARAH (DAPAT DIFUNGSIKAN SBG MOTOR & PEMBANGKIT)
2. MESIN ARUS BOLAK BALIK(DAPAT DIFUNGSIKAN SBG MOTOR & PEMBANGKITAN

MESIN ARUS SEARAH
Mesin arus searah : Suatu mesin yang dapat mengkonversi energi dari listrik
menjadi energi mekanik melalui medium medan magnet.
Fungsi medan magnet : • Tempat Penyimpanan Energi • Mengkopel proses perubahan energi
MotorEnergiListrik
EnergiMekanik
Medan Magnet
Input
Motor
• Tranduser yang dapat mengubah energi dari bentuk listrik menjadi bentuk mekanik.
• Arus listrik yang mengalir ke motor menyebabkan poros motor berputar.
• Daya listrik harus dicatu dalam bentuk dc. Pembangkit medan magnetik bisa memanfaatkan dari;– Magnet Permanen– Elektromagnetik yang memerlukan gulungan medan
dan catu daya

Mesin-Mesin Listrik
• Mesin-mesin listrik dapat dimanfaat sebagai penggerak yang biasa disebut sebagai motor [ inputnya energi listrik (V& I) dan outputnya energi mekanik (n & T)].
• Mesin-mesin listrik dapat dimanfaat sebagai pembangkit energi listrik yang biasa disebut sebagai generator [ inputnya energi mekanik (n&T) dan outputnya energi listrik (V&I)].
Manfaat Mesin – Mesin Listrik
Mesin-mesin listrik sangat dibutuhkan dalam kehidupan kita sehari-hari, dari kebutuhan rumah tangga sampai industri.Misalnya;Sebagai penggerak (seperti pompa air, lift, konveyor, blender, kulkas, printer, plotter, penggerak mesin perkakas numerik kontrol pada industri, dll), Sebagai pembangkit energi listrik ( seperti listrik yang kita manfaatkan sehari-hari; untuk memasak, penerangan, catu daya televisi, radio dll.)
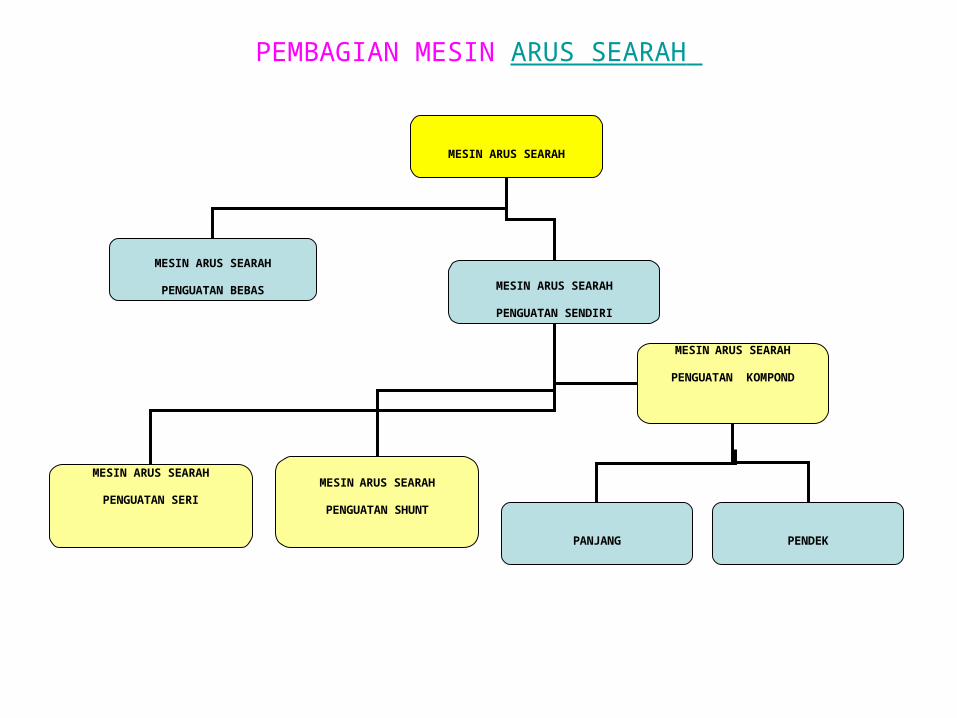
PEMBAGIAN MESIN ARUS SEARAH
MESIN ARUS SEARAH
MESIN ARUS SEARAH
PENGUATAN BEBAS MESIN ARUS SEARAH
PENGUATAN SENDIRI
MESINARUS SEARAH
PENGUATAN SHUNT
MESIN ARUS SEARAH
PENGUATAN SERI
MESINARUS SEARAH
PENGUATAN KOMPOND
PANJANG PENDEK
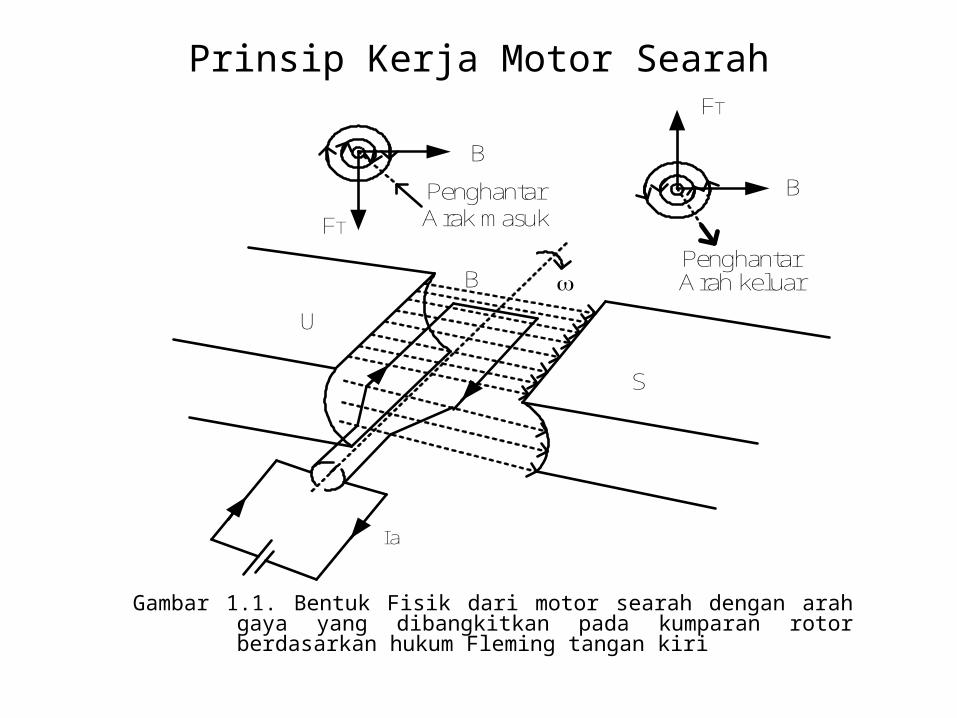
Prinsip Kerja Motor Searah
Gambar 1.1. Bentuk Fisik dari motor searah dengan arah gaya yang dibangkitkan pada kumparan rotor berdasarkan hukum Fleming tangan kiri
FT
B
PenghantarArah keluar
FT
B
PenghantarArak masuk
U
S
B w
Ia

Prinsip Kerja Motor Searah• Jika suatu penghantar dialiri arus listrik Ia, maka pada penghantar
tersebut dibangkitkan medan magnetik di sekelilingnya.
• Dan jika penghantar yang dilewati arus Ia tersebut ditempatkan dalam medan magnet B, maka akan terjadi interaksi antara kedua medan magnetik yang dihasilkan kumparan medan dan medan magnet yang dihasilkan jangkar (kumparan rotor).
• Dari interaksi kedua medan tersebut, dibangkitkan gaya FT. Arah gaya ini ditentukan oleh kaidah aturan tangan kiri, dengan jempol, telunjuk, dan jari tengah yang saling tegak lurus menunjukkan masing-masing arah FT, B, dan I.
• Besarnya gaya yang ditimbulkan sebanding dengan arus listrik Ia dan panjang penghantar efektif L yang memotong induksi medan magnetik B. Atau dapat dinyatakan dengan persamaan:
• FT = B.L.Ia..................................................................(1.1)
IakIakRRFT
IakF
Tm
T
'.
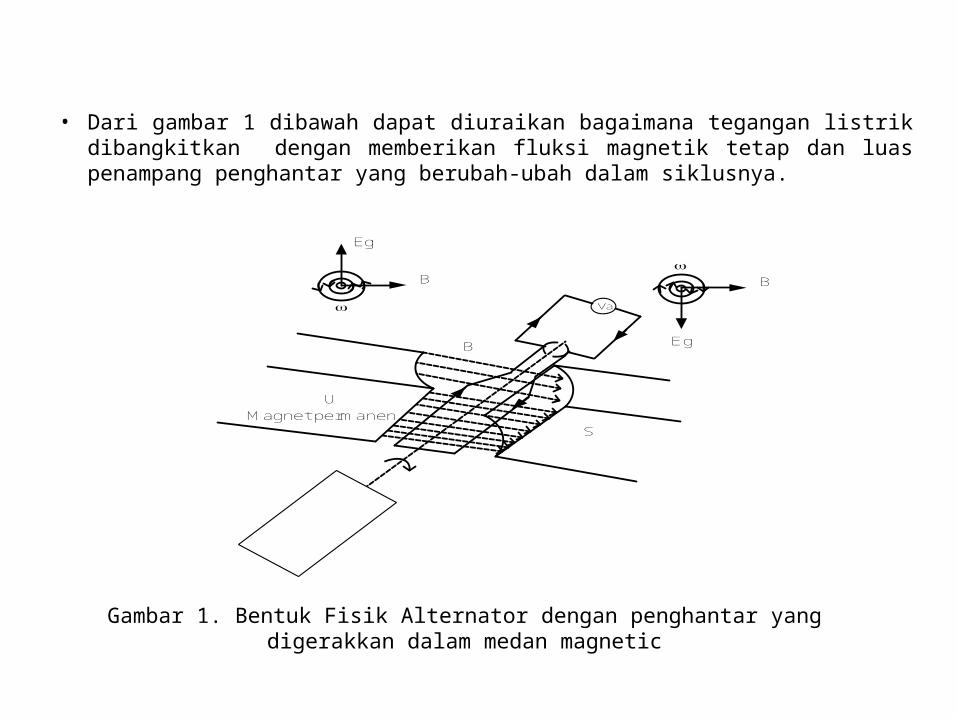
Gambar 1. Bentuk Fisik Alternator dengan penghantar yang digerakkan dalam medan magnetic
• Dari gambar 1 dibawah dapat diuraikan bagaimana tegangan listrik dibangkitkan dengan memberikan fluksi magnetik tetap dan luas penampang penghantar yang berubah-ubah dalam siklusnya.
Eg
B B
va
S
U
Magnet permanen
w
Eg
w
B

• Untuk penghantar yang mempunyai panjang L meter, digerakkan dalam medan magnetik dengan kecepatan gerakan v (meter/detik), sehingga dalam waktu dt penghantar tersebut telah bergerak sejauh v.dt.
• Sedangkan perubahan luas penghantar saat bergerak memotong medan magnetik ;
dA=v.dt.L ........................................................(4)

.............................(5)
• Sedangkan hubungan kecepatan tangensial dengan kecepatan angular adalah;
..............................................(6)
• dengan R adalah jari-jari kumparan penghantar pada mesin, sehingga persamaan (5) dapat disederhanakan menjadi :
.........................(7)
VoltNBLvdt
dtNBLv
dt
dANBe
..
Rv .w
VoltRNBLdt
dtNBLv
dt
dANBe
.. w
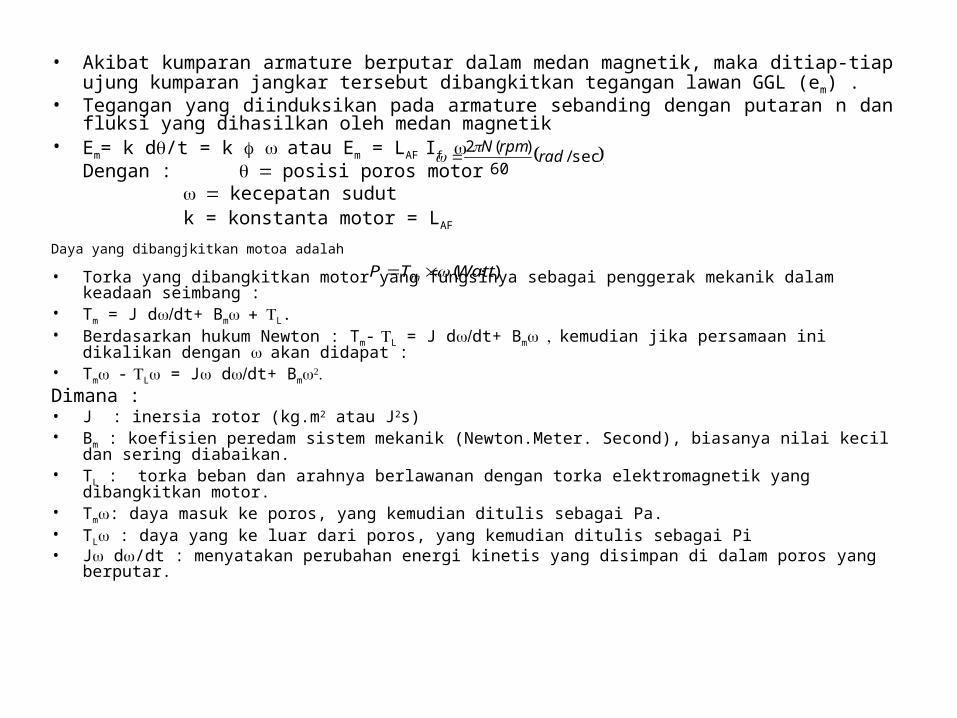
• Akibat kumparan armature berputar dalam medan magnetik, maka ditiap-tiap ujung kumparan jangkar tersebut dibangkitkan tegangan lawan GGL (em) .
• Tegangan yang diinduksikan pada armature sebanding dengan putaran n dan fluksi yang dihasilkan oleh medan magnetik
• Em= k d/t = k watau Em = LAF If wDengan : posisi poros motor
wkecepatan sudut k = konstanta motor = LAF
Daya yang dibangjkitkan motoa adalah
• Torka yang dibangkitkan motor yang fungsinya sebagai penggerak mekanik dalam keadaan seimbang :
• Tm = J dwdt+ BmwL.• Berdasarkan hukum Newton : Tm- L = J dwdt+ Bmwkemudian jika persamaan ini dikalikan dengan
wakan didapat :• Tmw- Lw = Jw dwdt+ BmwDimana :• J : inersia rotor (kg.m2 atau J2s) • Bm : koefisien peredam sistem mekanik (Newton.Meter. Second), biasanya nilai kecil dan sering diabaikan.• TL : torka beban dan arahnya berlawanan dengan torka elektromagnetik yang dibangkitkan motor.• Tmw: daya masuk ke poros, yang kemudian ditulis sebagai Pa.• TLw : daya yang ke luar dari poros, yang kemudian ditulis sebagai Pi• Jw dw/dt : menyatakan perubahan energi kinetis yang disimpan di dalam poros yang berputar.
sec)/60
)(2rad
rpmNw
)(WattTP m w

Prinsip Kerja Motor Searah
• Besarnya kerapatan medan magnetik B = /A, dengan adalah fluksi magnetik setiap kutub, dan A luas permukaan melingkar amartur atau lintasan penghantar selama berputar setara dengan 2R.L, dengan L adalah panjang rotor motor.
• Gaya tangensial yang bekerja di penghantar berputar didalam medan magnetik tersebut, mengakibatkan dibangkitkan torka motor Tm.
• Besarnya torka motor Tm sebanding dengan gaya tangensial FT dan jari-jari rotor R, atau dapat dinyatakan dengan formulasi sebagai berikut :
• Tm = R.FT = R.B.Ia.L atau dapat ditulis secara detail sebagai berikut :
…………….………..(1.2)

• Jika belitan motor arus searah terdiri dari belitan jangkar sebanyak Na dan belitan medan sebanyak Nf, maka induktansi mutual antara belitan jangkar yang berputar dan belitan medan adalah :
• Dengan adalah reluktansi kumparan motor dan celah udara
• Sehingga konstanta torka kT pada persamaan ( ) ekivalen dengan induktansi mutual yang terjadi pada motor, maksudnya kT = LAF.
• Jadi torka yang dibangkitkan motor arus searah dapat ditulis sebagai berikut:
• Tm= LAF..Ia. ( Newton-meter)
…………………………..………………………(1.3)
…………...……………………(1.4)

• InersiaJika suatu benda mempunyai momen kelembaman yang besar,bisa dikatakan bahwa benda tersebut sulit untuk digerakkan atau diberhentikan. Momen kelembaman atau inersia adalah ukuran kemampuan benda untuk melawan setiap usaha yang mengubah kecepatan berputarnya, sedangkan gaya yang diperlukan untuk memutar atau menghentikan benda berputar disebut torsi.Inersia J dianggap sebagai elemen yang menyimpan energi kenetik dari gerak rotasi. Inersia pada elemen tertentu besarnya tergantung pada komposisi geometris dari sumbu rotasi dan kecepatannya.
– Menurut hukum Newton, gerak rotasi dapat dinyatakan dengan • TJ(t)=J=Jdw/dt = Jd2/dt2.
• Gesekan (Peredam)– Peredam mempunyai sifat linier dalam suatu kondisi tertentu. Peredam
biasanya dimanfaatkan untuk meredam bermacam-macam gerak termasuk juga gerak isolasi. Peredam atau gesekan viscous mempunyai karakteristik yang menyerap energi, atau sama dengan sifat resistansi dalam rangkaian listrik. Bila koefisien gesekan (terutama viscous) dalam torsi per satuan kecepatan sudut, maka Tb(t) = Bd/dt
• Pegas– Jika sebuah pegas dipuntir, maka simpangan sudut sebanding dengan besarnya
torsi yang dipakai untuk memutar, Tk(t) = K(t). Umumnya pegas dianggap sebagi elemen penyimpan energi potensial atau analog dengan sifat kapasitor dalam rangkaian listrik

Prinsip Kerja Motor Searah
• Akibat dari armature yang berputar dalam medan magnetik, maka timbulnya tegangan lawan (em) dalam gulungan armature tersebut.
• Tegangan yang diinduksikan pada armature sebanding dengan putaran w dan fluksi yang dihasilkan oleh medan magnetik, atau dapat dinyatakan dengan formulasi:
• Em = kv.d/dt = kvw..........................................……………….(1.5)
• Mengacu pada persamaan (1.3), maka tegangan induksi yang dibangkitkan motor dapat ditulis sebagai berikut:
• Em = LAF..w...............................................................................(1.6)
Dengan: = posisi poros motorw=kecepatan sudutkv = konstanta back emf
Beban Mekanik Motor
• Beban mekanik motor adalah
……………………………………………(1.7)
Dengan J adalah inersia rotor dengan satuan kg-m2 atau J.s2. Suatu benda yang mempunyai momen kelembaman yang besar, bisa dikatakan bahwa benda tersebut sulit untuk digerakkan atau diberhentikan.
Momen kelembaman atau inersia adalah ukuran kemampuan benda untuk melawan setiap usaha yang mengubah kecepatan berputarnya.Inersia sebagai elemen yang menyimpan energi kinetik dari gerak rotasi.

• Syarat motor agar mampu menggerakan beban mekanik, motor harus mampu mengembangkan torka sebesar
……………………………………………(1.8)
• Tm merupakan torka motor yang dibangkitkn motor. Torka ini dimaksudkan untuk dapat menggerakan beban TL, mengatasi gangguan dan gesekan yang dialami motor.
• Konstanta B adalah koefisien gesekan atau peredam dari putaran motor mempunyai karakteristik yang menyerap energi atau sama dengan sifat reisstansi dalam rangkaian listrik dengan satuan N.m.s umumnya kecil dan dapat diabaikan.
• Sedangkan TL adalah torka beban pada poros motor.
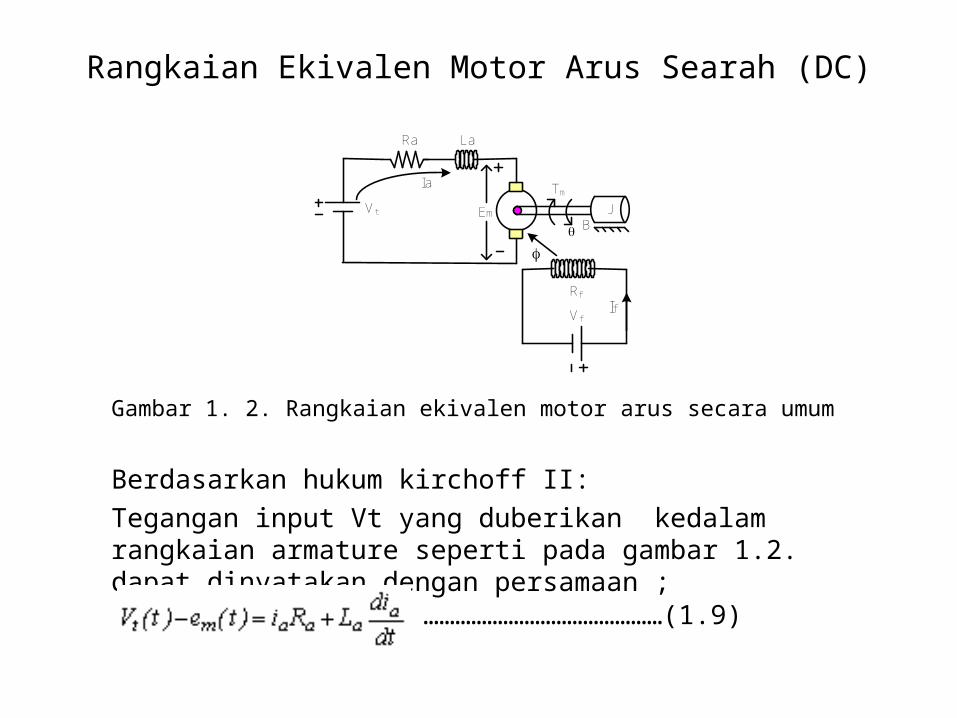
Rangkaian Ekivalen Motor Arus Searah (DC)
Gambar 1. 2. Rangkaian ekivalen motor arus secara umum
EmVt
Ia
Vf
Rf
If
JB
Tm
Ra La
Berdasarkan hukum kirchoff II:
Tegangan input Vt yang duberikan kedalam rangkaian armature seperti pada gambar 1.2. dapat dinyatakan dengan persamaan ;
………………………………………(1.9)
• Dengan Ra dan La masing-masing adalah resistansi dan induktansi dari kumparan armature motor. Dalam keadaan mantap pengaruh La bisa diabaikan, sehingga
……………………………………………………(1.10)
• Sehingga arus jangkar motor
atau …………………………………(1.11)
• Sehingga arus jangkar motor persamaan (1.11) disubsitukan kepersamaan (1.2) diperoleh hubungan torka terhadap kecepatan motor;
………………………………………..……(1.12)
• Pada saat motor masih belum bergerak (diam) dikatakan dalam keadaan stall. Pada kondisi ini motor mengembangkan torka stall, dan dapat dicari melalui subsitusiw = 0, sehingga diperoleh torka stall ;
……………………………………………….…..……(1.12)
• Torka ini terjadi pada saat motor mulai bergerak atau ketika beban yang dipikul lebih besar dari pada besarnya torka stall yang tersedia.
• Kecepatan tanpa beban, adalah kecepatan yang paling tinggi, dapat ditentukan pada saat motor berjalan tanpa beban mekanik, yakni TL=Tm=0, sehingga kecepatan beban nol adalah;
……………………………..……(1.13)

Karakteristik torka – putaran pada suatu harga Vt tertentu dapat dilihat pada gambar 1.3 dibawah ini:
Gambar 1.3. Karakteristik torka vs putaran motor searah
• Jika motor tanpa beban TnL diberi tegangan Vt, dan mempunyai kecepatan tanpa beban wnL, dengan motor mendapat beban sebesar Tx pada porosnya, maka titik kerja motor bergeser pada koordinat (Tx,wx).
Dengan catatan sebagai berikut ;1 wx diperoleh dari name plate (papan nama)2. Tx dihitung dengan 2 cara yaitu:
• Tx = kT.In.( In adalah arus nominal dapat dilihat pada papan nama)
• Tx = HP/wx (HP diperoleh dari papan nama dan wx adalah putaran nominal).
• Jadi torsi beban akan memperkecil kecepatan motor. Berkurangnya kecepatan motor ini mengakibatkan ggl lawan (Ea) menurun.
• Hal ini bisa diuraikan dari persamaan, yakni dengan tegangan masuk jangkar Vt yang konstan, maka ggl lawan em yang menurun menyebabkan arus jangkar Ia menjadi besar.
Menentukan Parameter Kecepatan Beban Nol Berdasarkan Name Plate
Penentuan kecepatan beban nol (tanpa beban) berdasarkan name plate suatu motor :
Penentuan kecepatan kecepatan normal berdasarkan name plate suatu motor :
Sehingga :
……………………………..……(1.13a)

Maka :
Efisiensi motor adalah :
…………………….…..…..……(1.13b)
………………..……(1.13c).
Pada mesin searah berlaku Efisiensimaksimum motor terjadi pada keadaan rugi-rugi jangkar sama dengan ½ rugi-rugi seluruhnya adalah :
…….……….…..…..……(1.13d)
Rugi-rugi jangkar :
Untuk Rugi-rugi jangkar sama dengan 1/2 rugi-rugi keseluruhnya:
Sehingga tahanan jangkar agar efisiensi motor maksimum :
……………………….….…..…..……(1.13e)
………………..….…..…..……(1.13f)

Contoh
• Suatu motor dc mempunyai name plate:
• 5 HP,200 volt, In =5Ampere, 3000 rpm, arus medan If = 0,6 Ampere, tahanan jangkar Ra =0,5 Ω
• Buatlah karakteritik motor dari data diatas !
• Kt= 60x(Vt-InRa)/ 2n = 60x(200-5x0,5)/ 2xx3000=0,63
• Tx=HP/wn=(5x 746)/(2n) = (5x 746)/(2xx3000)= 11,873 N-m
wx= 2n/60= 2x3000/60 = 314,1593 rad/sec
• Tstall =kTVt/Ra =0,63x200/0,5=251,4648 N-mLatihan• Suatu motor dc mempunyai name plate:
• 10 HP, 200volt, In = 10 Ampere, 3000 rpm, arus medan If = 1,2 Ampere, tahanan jangkar Ra =0,8 Ω
Tentukan :
• Kecepatan angular normal wx dan Kecepatan angular normal wnL
• Torka normal (Tx) dan Torka Stall (Tstall)
• Buatlah karakteritik motor dari data diatas (batas Kls B 28-9-2010)

Persamaan (1.14) dapat disederhanakan menjadi
………………………………..……(1.15)
Dari persamaan (1.15) dapat diuraikan hubungan antara keluaran mekanik w terhadap masukan tegangan input Vt dapat dituliskan;
…………………..……(1.16)
……………………………..……(1.14)
• Dengan mensubsitusikan persamaan (1.12) kepersamaan (1.8), maka diperoleh hubungan
• Karakteristik Dinamis
Contoh:Suatu motor arus searah magnet permanen memiliki konstanta torsi dan back emf sebagai berikut :
kT = 0,824 Nm/A, kv = 0,824 Volt.detik/radBila hambatan dari kumparan adalah 0,41 ohm
dan inersia rotor 2,15.10-2 kg-m2 dan koefisien gesekan 0,05.10-2 Nm.detik/rad dan fluks = 1 weber.
Hitunglah :Kecepatan putaran motor dalam kondisi
stasioner ( Vt = 85Volt), untuk kondisi tanpa beban dan kondisi beban penuh (13,57 Nm).

Penyelesaian
Kecepatan putaran motor dalam kondisi stasioner kondisi beban penuh (13,57 Nm).
Kecepatan putaran motor dalam kondisi stasioner ( Vt = 85Volt), untuk kondisi tanpa beban
Pembagian Motor Arus Searah:
1. Motor Arus Searah Penguat bebas
2. Motor arus searah penguat sendiri– Motor arus searah shunt– Motor arus searah seri– Motor arus searah kompound
• Motor arus searah kompound panjang
• Motor arus searah kompound pendek

Motor Arus Searah Penguat Bebas
Gambar 1.4. Rangkaian ekivalen motor arus searah penguat bebas
Em Vt
Ia
Vf Rf
If
J
B
T m
Dari rangkaian ekivalen pada gambar 1.4, berdasarkan hukum kirchoff tentang tegangan didapat persamaan:Vt = Em+IaRa……………………………………………(1.17)
Hubungan kecepatan dengan torka motor adalah sebagai berikut :
…………………………...……(1.18)
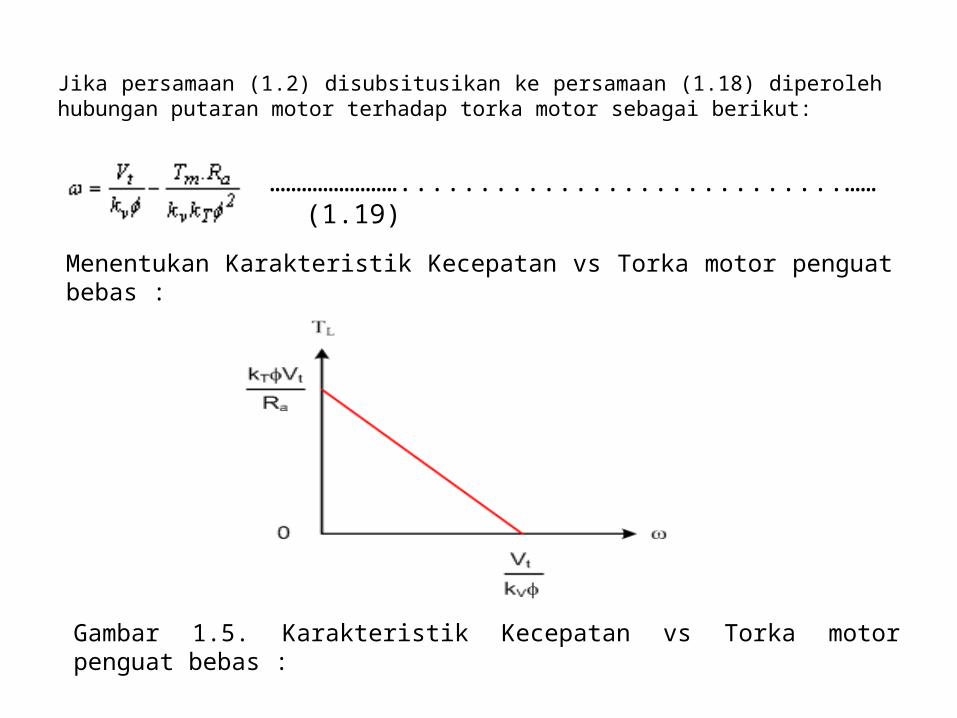
Jika persamaan (1.2) disubsitusikan ke persamaan (1.18) diperoleh hubungan putaran motor terhadap torka motor sebagai berikut:
……………………............................……(1.19)
Menentukan Karakteristik Kecepatan vs Torka motor penguat bebas :
Gambar 1.5. Karakteristik Kecepatan vs Torka motor penguat bebas :

Gambar 1.6. Karakteristik kecepatan motor vs torka,dengan beban variasi
Dari gambar 1.6. dapat dianalisis sebagai berikut :
Semakin tinggi torka beban diberikan, kecepatan motor semakin kecil dan sebaliknya semakin kecil torka beban diberikan kecepatan semakin tinggi
• Pemanfaatan motor sebagai penggerak mekanik, diinginkan putaran konstan, walaupun beban bervariasi ; sementara berdasarkan karakteristik gambar 1.6, dengan beban bervariasi, kecepatan motor juga bervariasi.
• Agar putaran motor konstan, pada saat beban berubah ada 3 parameter yang dapat diatur yaitu :– Pengaturan Tegangan input motor
– Pengaturan Tahanan jangkar
– Pengaturan eksitasi motor
• Pengaturan putaran konstan melalui pengaturan tegangan masukkan

Gambar 1.7 Karakteristik putaran konstan melalui pengaturan tegangan masuk motor.
wrad/detik)
Vt
kV
0
TL1
TL2
TL3
w1ww3
kTVt2
Ra
kTVt3
Ra
kTVt1
Ra
TL(N-m)
• Pada Gambar 1.7 menunjukkan Karakteristik putaran konstan (w2) dengan beban yang berbeda-beda melalui pengaturan tegangan masuk motor.
• Pada saat motor diberi beban TL1 dibutuhkan teganganVt1, TL2 dibutuhkan tegangan Vt2, dan beban TL3 dibutuhkan tegangan sebesar Vt3.
Contoh• Suatu motor arus searah penguat bebas memiliki parameter sebagai berikut;
Pin=7680 W, V=240V, Ra=0,5 ohm, dan Rf=120 ohm serta putaran nominal 1500 rpm.• Tentukan Arus beban penuh, dan arus saat start.• Tentukan kecepatan beban nol.
• Pada keadaan beban penuh Ib=7680W/240V=32 AmpereIf=240V/120 ohm=2 A
• Sehingga arus jangkar (Ia)– Ia=Ib = 32Ampere
• Pada keadaan pengasutan ;– Ia=(240V-0V)/0,5 ohm=480 A
• Sehingga pada saat pengasutan terjadi peningkatan arus sebesar 15 kali lebih besar terhadap aliran arus saat motor beban penuh.
• Tegangan induksi pada beban penuh (Em) = Vt-IaRa = 240V-32A.0,5ohm = 220,4 Volt
wnL=(240V. 2x1500/60rad/detik)/220,4V=171,4 rad/detik atau 1636 rpm
• Suatu motor arus searah penguat bebas memiliki parameter sebagai berikut; Pin=2700 W, V=100V, Ra=0,025 ohm, dan Rf=10 ohm serta putaran nominal 3000 rpm.
• Tentukan Arus beban penuh, dan arus saat start.
• Tentukan kecepatan beban nol.
Rangkaian Pengasutan dengan Penyisipan Resistor
EmV
Ia
VfRf
If
d
Catudaya
dc
Ib
RaR1 R2 R3
C1 C2 C3
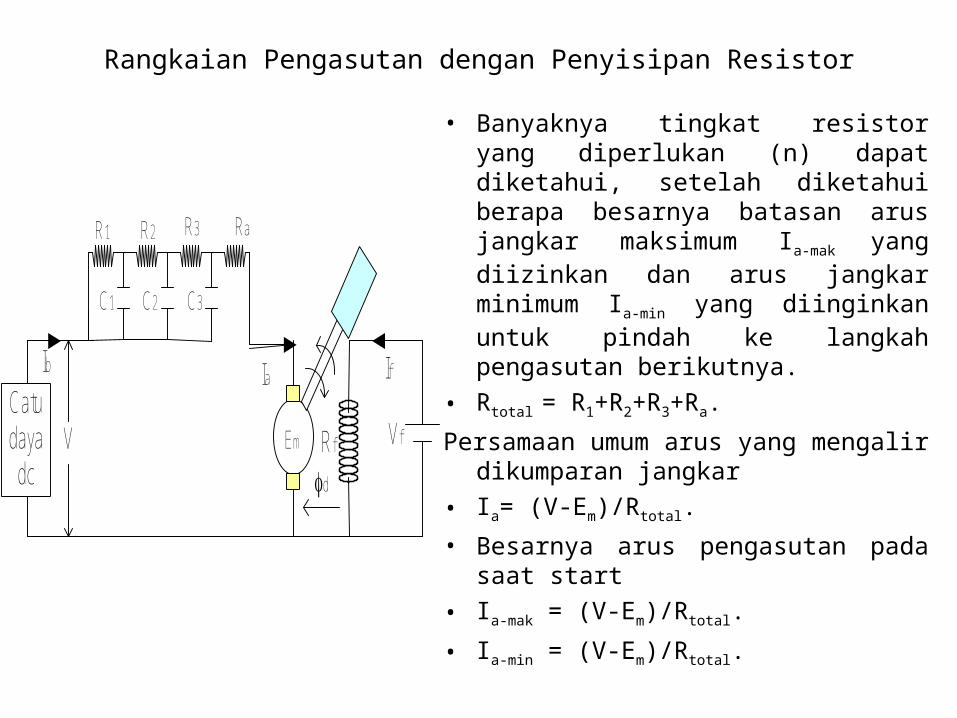
• Banyaknya tingkat resistor yang diperlukan (n) dapat diketahui, setelah diketahui berapa besarnya batasan arus jangkar maksimum Ia-mak
yang diizinkan dan arus jangkar minimum Ia-min yang diinginkan untuk pindah ke langkah pengasutan berikutnya.
• Rtotal = R1+R2+R3+Ra.
Persamaan umum arus yang mengalir dikumparan jangkar
• Ia= (V-Em)/Rtotal.
• Besarnya arus pengasutan pada saat start
• Ia-mak = (V-Em)/Rtotal.
• Ia-min = (V-Em)/Rtotal.

• Pada saat C1 dihubungkan, seketika itu arus meningkat;– Ia-mak =(V-Em)/Rtotal-R1.
– Ia-min =(V-Em)/Rtotal-R1.
• Pada saat C2 dihubungkan, seketika itu arus meningkat;– Ia-mak =(V-Em)/Rtotal-R2.
– Ia-min =(V-Em)/Rtotal-R2.
• Pada saat C3 dihubungkan, seketika itu arus meningkat;– Ia-mak =(V-Em)/Rtotal-R3.
– Ia-min =(V-Em)/Rtotal-R3.
• Perbandingan Ia-mak/Ia-min pada tiap perpindahan posisi kontak satu ketitik kontak lainnya dapat ditulis sbb:
• Ia-mak/Ia-min=Rtotal/Rtotal-R1=Rtotal-R1/Rtotal-R2= Rtotal-R(n-1)/Rtotal-R(n)
• Dengan menganggap K= Ia-mak/Ia-min
• Rtotal-Rn=RA
• Rtotal-R(n-1) =K.R total-R(n)
Atau
• Rtotal=K (n-1).K.Ra= KnRa
• Secara logaritmis, persamaan menjadi :
• Log(Kn)=(log(Rtotal/Ra))
• n x Log(K)=(log(Rtotal/Ra))
• n=(log(Rtotal/Ra))/log(la-mak/Ia-min)
TUGAS 1- TTLSEMESTER GANJIL 2010/2011
DOSEN PENGASUH MATA KULIAH : SUWITNO, ST.MT
• Sebuah motor dc Po = 4 HP, 350V, Pcu= 35% dari rugi-rugi total. Arus medan normal = 0,5A dan efisiensi beban penuh sebesar 89%.
• Jika ingin disain pengasutan yang terdiri atas beberapa resistor dengan arus maksimum sebesar 2 kali nilai beban penuhnya.
• Tentukan nilai resistor tiap tahap dan banyakanya tahapan yang harus dibuat.
PenyelesaianPo/Pin = 3730W/Pin
Pin=Po/= 3730W/88% = 4239W
Pcu+inti+gesekan= Pin-Po=4239W-3730W = 509W
Pcu=50%Prugi-total=254,5W
Ib=Pin/V=4239/200V=21,195A
Ia=Ib=21,195A
Ra=Pcu/Ia2=254,5W/(21,195A)2= 0,6 ohm
Ia-min=Ib=21,195A
Ia-mak=2xIb=2x21,195A=42,39A
Rtotal=V/Ia-mak=200V/42,39A=4,7ohmBanyak jumlah resitor yang diperlukan untuk proses pengasutan;• n=(log(Rtotal/Ra))/log(la-mak/Ia-min)• n=log(4,7/0,6)/log(42,39/21,195)• n=log(4,7/0,6)/log(2)=3
• Beberapa saat setelah motor distarting, maka terjadi aliran arus jangkar sebesar arus beban penuh(nominal), sehingga ggl motor yang semula 0 Volt juga meningkat menjadi sebesar:
• Em=V-Ia.Rtotal=200 Volt-21,195A. 4,7 ohm• Em=200V - 99,6165V = 100,3835 V=100,4V• Ketika kontak berpindah ke C1, kembali arus
maksimum mengalir, sedangkan besarnya ggl motorl masih bertahan di posisi 100,4 V, maka besarnya tahanan pengasutan totalnya menjadi:
• Rtotal-R1=R2+R3+Ra =(V-Em)/Ia-mak
• Rtotal-R1=R2+R3+Ra=(200V-100,4)/42,39A• Rtotal-R1=R2+R3+Ra=99,6V/42,39A= 2,35 ohm
• Setelah keadaan mulai berangsur-angsur ke keadaan mantap (steady state) maka akan mengalir arus jangkar yang menyebabkan terjadi jatuh tegangan yang lebih kecil pada tahanan asut, sehingga besarnya ggl motor ditentukan ;
• Em=V-Ia.Rtotal-R1=200V-21,195A. 2,35 ohm• Em=V-Ia.Rtotal-R1=200V-49,808V=150,1 92 V• Kemudian ketika kontak pengaturan resistor berpindah
ke C2, kemudian arus maksimum mengalir, sedangkan sebesarnya ggl motor masih bertahan diposisi 150,192 V, maka besarnya tahanan pengasutan totalnya ;
• Rtotal-R2=R3+Ra =(V-Em)/Ia-mak
• Rtotal-R2=R3+Ra =(200V-150,192V)/ 42,39A• Rtotal-R2=R3+Ra =(49,808V/42,39A =1,175 ohm
• Kembali setelah keadaan berangsur-angsur ke adaan mantap, maka akan mengalir arus jangkar yang menyebabkan jatuh tegangan yang lebih kecil pada tahanan asut sebelumnya, sehingga besarnya ggl motor menjadi;
Em=V-Ia.Rtotal-R2=200V-21,195A. 1,175 ohm
Em=V-Ia.Rtotal-R2=200V-24,904V = 175,096V
• Kemudian ketika kontak pengaturan berpindah ke C3, kembali arus maksimum mengalir, sedangkan besarnya ggl motor masih bertahan diposisi 175,096V, maka besarnya tahanan pengasutan totalnya sama dengan tahanan jangkarnya Ra, sehingga besarnya arus jangkar maksimum yang mengalir dapat ditentukan:
Ia-mak=(V-Em)/Ra=(200V-175,1V)/ 0,6 ohm
Ia-mak=(V-Em)/Ra=(24,9V/0,6 ohm = 41,5 A

• Sehingga jika diperhatikan arus yang mengalir saat pengasutan (41,5A) tetap dibawah, maksimum arus yang mengalir pada kumparan jangkar sebesar 2 kali beban penuh 2x21,195A = 42,39A
• Adapun nilai tahanan pengasutan selama proses pengasutan :
Rtotal-R2=R3+Ra =(49,808V/42,39A =1,175 ohm
1,175 ohm =R3+0,6 ohm
R3 = 1,175 ohm - 0,6 ohm = 0,575 ohm
• Rtotal=R2+R3+Ra = 2,35 ohm
R2+ 0,575 ohm + 0,6 ohm = 2,35 ohm
R2 = 2,35ohm-(0,575+0,6) ohm
R2 =2,35ohm-1,175ohm = 1,175 ohm
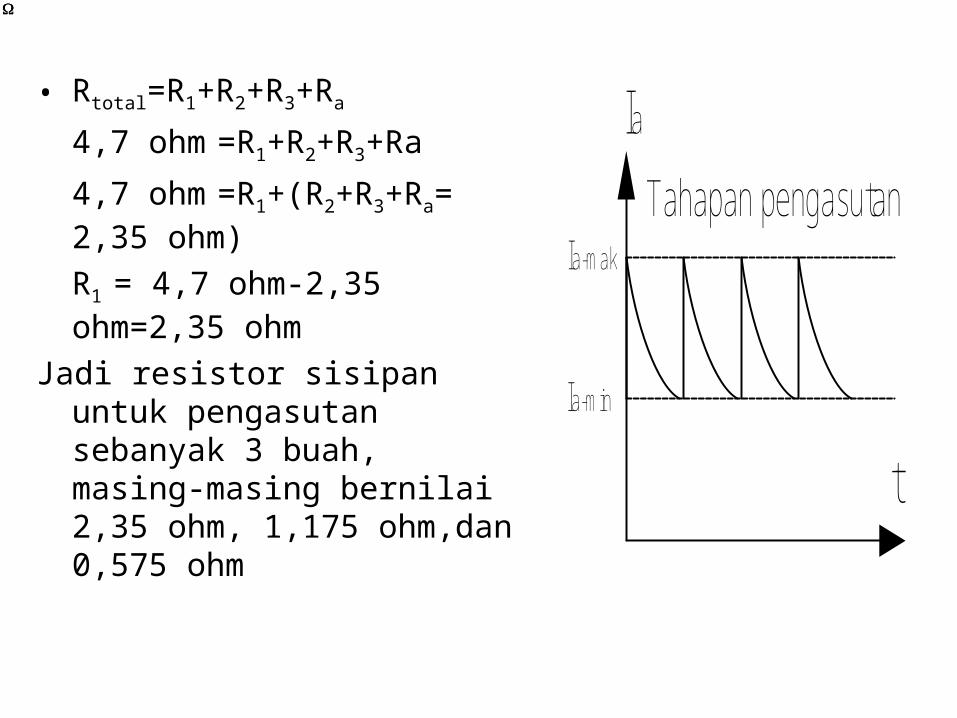
• Rtotal=R1+R2+R3+Ra
4,7 ohm =R1+R2+R3+Ra
4,7 ohm =R1+(R2+R3+Ra= 2,35 ohm)
R1 = 4,7 ohm-2,35 ohm=2,35 ohm
Jadi resistor sisipan untuk pengasutan sebanyak 3 buah, masing-masing bernilai 2,35 ohm, 1,175 ohm,dan 0,575 ohm
Tahapan pengasutan
Ia
Ia-mak
Ia-min
t
• Atau alternatif lain untuk menentukan nilai resistor pada setiap tahapan adalah;
Rtotal = K.Rtotal-R1
Rtotal-R1 = K.Rtotal-R2
Rtotal-R2 = K.Rtotal-R3
• Sehingga:
Rtotal-R1=Rtotal/K = 4,7 ohm/2 = 2,35 ohm
Rtotal-R2=Rtotal-R1/K =2,35 ohm/2 =1,175 ohm
Rtotal-R3=Rtotal-R2/K =1,175 ohm/2 = 0,6 ohm
R1 = Rtotal - Rtotal-R1 = 4,7 ohm -2,35 ohm =2,35 ohm
R2 = Rtotal-R1 - Rtotal-R2 = 2,35 ohm-1,175 ohm=1,175ohm
R3 = Rtotal-R2 - Rtotal-R3 =1,175 ohm- 0,6 ohm = 0,575ohm

tugasKELAS B
• Sebuah motor dc penguat bebas dengan daya keluaran Po = 12 HP, 250V, Pcu= 40% dari rugi-rugi total, dan efisiensi beban penuh sebesar 75%.
• Jika ingin disain arus maksimum sebesar 2 kali nilai beban penuhnya.
• Tentukan banyak nya tahapan dan nilai resistor tiap tahap yang harus dibuat.
• Tentukan nilai tahanan setiap stepnya

tugasKELAS A
• Sebuah motor dc penguat bebas dengan daya keluaran Po = 12 HP, 250V, Pcu= 40% dari rugi-rugi total, dan efisiensi beban penuh sebesar 75%.
• Jika ingin disain arus maksimum sebesar 2 kali nilai beban penuhnya.
• Tentukan banyak nya tahapan dan nilai resistor tiap tahap yang harus dibuat.
• Tentukan nilai tahanan setiap stepnya
Tugas KELAS C (17-10-2012)
• Sebuah motor dc penguat bebas dengandaya keluaran Po = 12 HP, 500V, Pcu= 25% dari rugi-rugi total, dan efisiensi beban penuh sebesar 75%.
• Jika ingin disain arus maksimum sebesar 3 kali nilai beban penuhnya.
• Tentukan banyak nya tahapan dan nilai resistor tiap tahap yang harus dibuat.
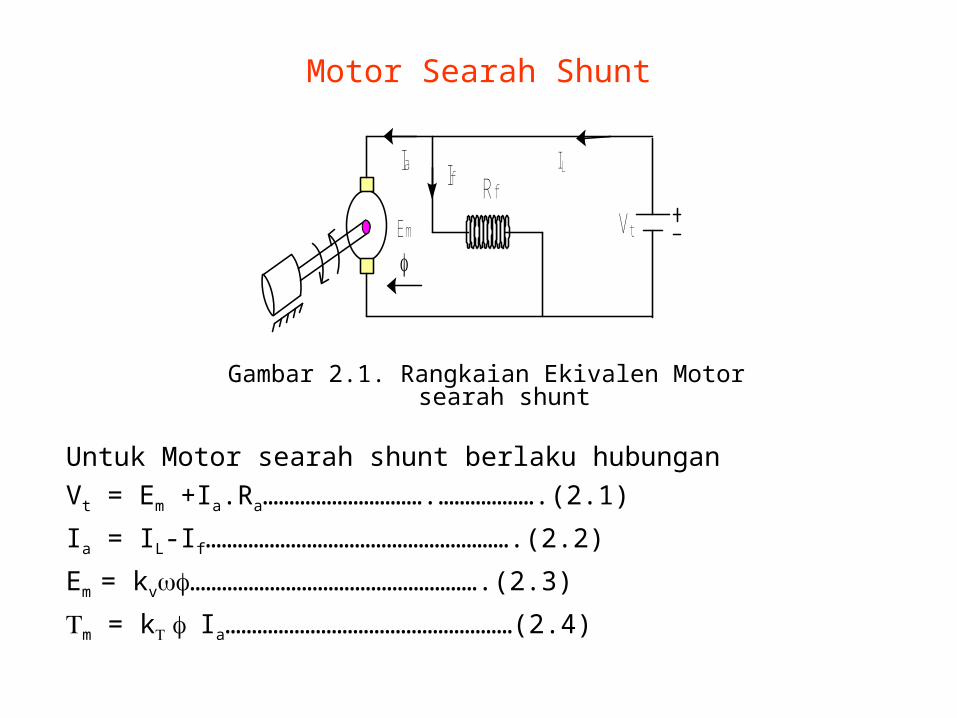
Motor Searah Shunt
Gambar 2.1. Rangkaian Ekivalen Motor searah shunt
Em
IaRf
If
IL
Vt
Untuk Motor searah shunt berlaku hubungan
Vt = Em +Ia.Ra………………………….……………….(2.1)
Ia = IL-If………………………………………………….(2.2)
Em = kvw……………………………………………….(2.3)
m = kIa………………………………………………(2.4)

Dari persamaan (2.6) diatas menunjukkan bahwa pada motor shunt bertambahnya kopel (artinya arus jangkar bertambah besar) mengakibatkan kecepatan (w) menurun.
……………………............................……(2.5)
Jika persamaan (2.4) disubsitusikan ke persamaan (2.5) diperoleh formulasi sebagai berikut :
……………………..................……(2.6)
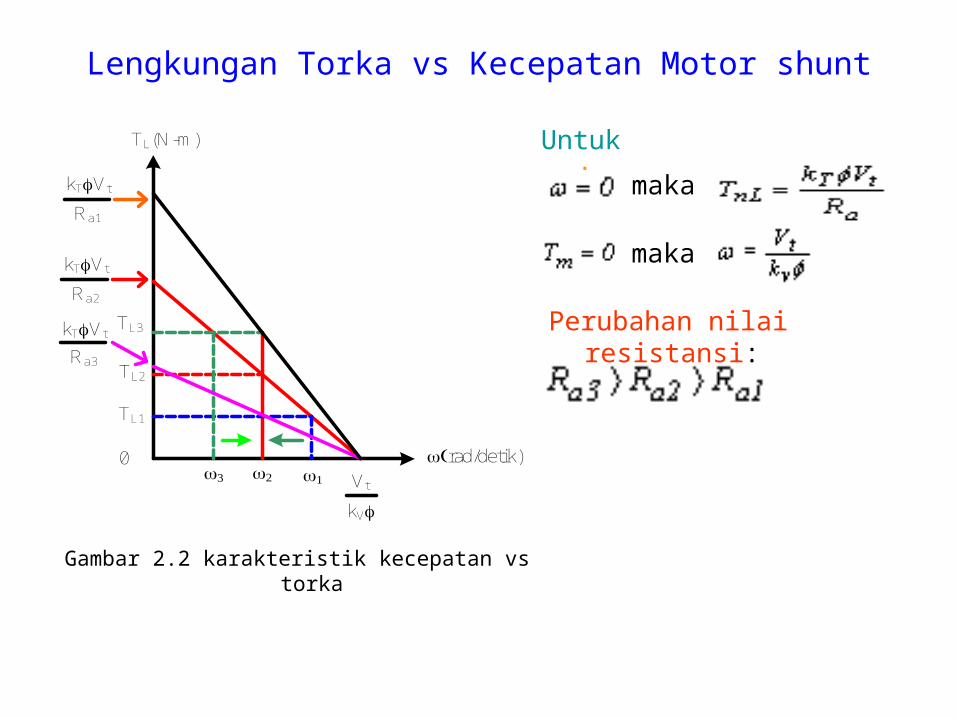
Lengkungan Torka vs Kecepatan Motor shunt
Gambar 2.2 karakteristik kecepatan vs torka
wrad/detik)
Vt
kV
0
TL1
TL2
TL3
w1ww3
kTVt
Ra2
TL(N-m)
kTVt
Ra3
kTVt
Ra1
Untuk :
maka
maka
Perubahan nilai resistansi:

Menentukan Kecepatan beban nol
• Penentuan kecepatan tanpa beban :
• Kecepatan normal berdasarkan papan nama :
• Sehingga diperoleh
• Maka penentuan kecepatan tanpa beban :
……………………..................……(2.7)
……………..................……(2.8)

• Efisiensi maksimum suatu motor, terjadi pada rugi-rugi jangkar sama dengan setengah rugi-rugi keseluruhan
• Rugi-rugi jangkar :
atau
• Sehingga nilai parameter, agar efisiensi motor maksimum adalah:
……..................……(2.9)
……...........................……(2.10)
……................................................……(2.11)

Contoh1
• Suatu motor arus searah shunt 500Volt, menarik arus total 5A, ketika berputar tanpa dibebani. Resistansi rangkaian jangkar sebesar 0,25 ohm dan resistansi kumparan medan sebesar 125 ohm putaran nominal 3000 rpm.
• Hitunglah efiensi dan daya keluaran ketika motor dibebani dan menarik arus 100A
Penyelesaian• Arus medan shunt (Ifp)=Vt/Rfp= 500V/125 ohm = 4A• Arus jangkar tanpa beban (IanL)= (IL-Ifp) = (5A-4A) =1A• Rugi-rugi daya tembaga (PcunL)= IanL
2.Ra =12 A2x 0,25 ohm = 0,25 Watt.
• Karena selain tembaga, (rugi inti dan rugi angin dan gesekan) merupakan rugi tetap /konstan (Pk) = Vt x IL – Pcu-nL= 500Vx5A - 0,25 Watt = 2499,75 Watt.
Pada Kondisi Beban Penuh
• Pin =Vt x IL=500V x 100A= 50 kW
• Pcu = (IL-Ifp)2.Ra =(100-4)2A2x 0,25 ohm=2,304 kW
• Jumlah rugi-rugi (Prugi)=Pcu+Pk = 2,304kW+2,4997kW = 4,8 kW.
• Pout=Pin- Prugi = 50 kW – 4,8 kW = 45,2 kW• Efisiensi = Pout/Pin x 100% = 45,2kW/50kW x 100%=90,4 %• Torka pada poros motor
Tm=Pout/wm=(60x45.200)/(2x3000)=143,876 N-m
• Jadi besarnya daya keluaran beban penuh sebesar 45,2 kW dan efisiensi beban penuh sebesar 90,4%.

Contoh 2
• Suatu motor arus searah shunt 250 V dengan daya keluaran nominal 12,5 kW berputar dengan kecepatan 1000rpm pada keadaan tanpa beban dan menarik arus masukan 4 Ampere.
• Resistansi jangkar 0,5 ohm dan resistansi medan shunt 250 ohm.• Hitung efisiensi motor tersebut ketika menyalurkan daya keluaran beban penuh 12,5
kW dan beroperasi pada tegangan 250V
Penyelesaian• Ifp=Vt/Rfp = 250V/250 ohm = 1Ampere• Ia-nL=(IL-Ifp) = (4 -1)Ampere = 3 Ampere• Pcu-nL=Ia-nL
2.Ra =3x 0,5 ohm = 4,5 Watt• Pk =Vt x IL – Pcu-nL=250V x 4 A – 4,5 W =995,5 Watt
Pada kondisi beban penuh:• IL=Pnominal/Vt = 12.500W/250V = 50 Ampere• Pcu=(IL-Ifp)2.Ra =(50-1)2 x 0,5 ohm=1.200,5 Watt• Pk = Vt x IL – Pcu-nL=250V x 4A-4,5 W=995,5 Watt• Prugi = Pcu +Pk=1200,5 W+995,5W = 2.196 Watt• Efisiensi = Pout/Pin x 100% =12,5kW/14.696kW x 100%= 85,06 %• Torka pada poros motor Tm=Pout/wm=(60x12500)/(2x1000)=119,366 N-m

quis kls C 31 Oktober 2012
• Suatu motor arus searah shunt 200Volt, menarik arus total 4 A, ketika berputar tanpa dibebani. Resistansi rangkaian jangkar (Ra) sebesar 0,025 ohm dan resistansi kumparan medan (Rf) sebesar 100 ohm, 3000rpm
Hitunglah :• daya keluaran ketika motor dibebani dan menarik arus
200A.• Torka Yang dihasilkan motor pada arus beban 200A• Efisiensi motor arus searah jenis shunt (batas kuliah Kls
C- 31-10-2012)
Tugas tgl 7-11-2012 kls C
• Suatu mesin Dc Shunt mempunyai data Sheet Va =100Volt, daya output = 8 HP, rugi tembaga = 37 % dari rugi-rugi total, efisiensi Mesin 80 %, arus medan (if) =2 Ampere, dengan putaran 1500 rpm
• Tentukan Torka yang dihasilkan motor dc shunt
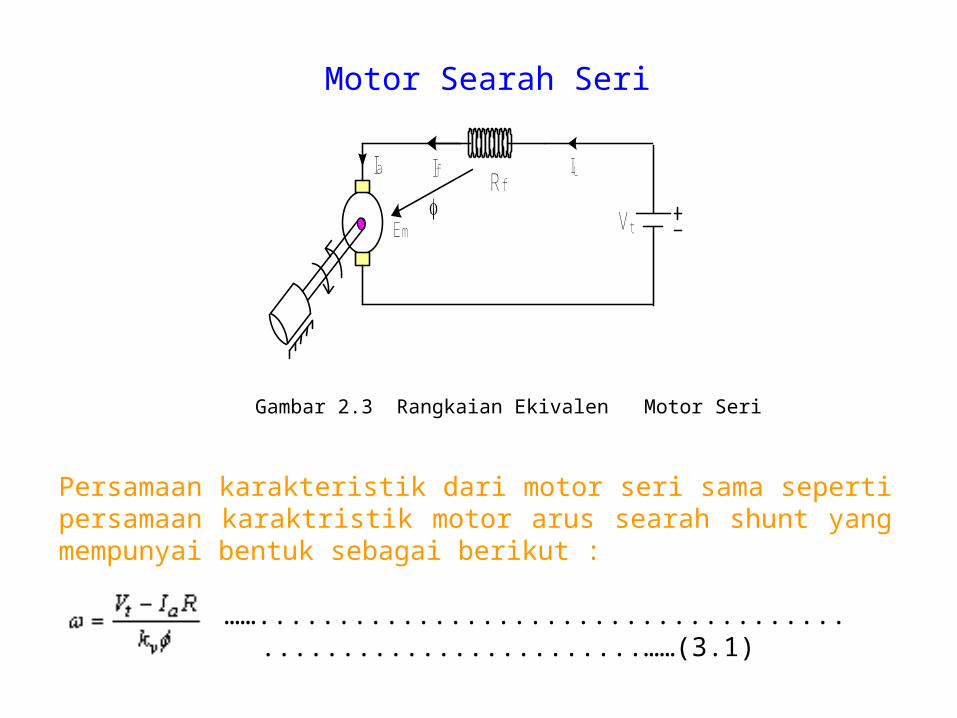
Motor Searah Seri
Gambar 2.3 Rangkaian Ekivalen Motor Seri
Em
IaRf
If
IL
Vt
Persamaan karakteristik dari motor seri sama seperti persamaan karaktristik motor arus searah shunt yang mempunyai bentuk sebagai berikut :
…….............................................................……(3.1)

• Dengan R adalah tahanan total didalam rangkaian jangkar yang terdiri dari tahanan jangkar, dan tahanan kumparan medan.
• Tetapi besar fluks magnetik dari motor searah seri bergantung kepada besar arus jangkarnya, dimana hubungan antara besaran fluksi magnet dan besar arus jangkar untuk mudahkan analisa maka diandaikan sebanding if adalah Ia = If.
• Besarnya torka elektromagnetik yang dibangkitkan motor seri :
……................................................……(3.2)
• atau
…….................................................................……(3.3)
• Kecepatan motor seri dapat ditulis :
……...............................................................……(3.4)

• Torka dengan kecepatan w=0
……......................................................……(3.5)
Gambar 2.4 Kecepatan.vs Torka dengan pengaturan tegangan dan tahanan total motor
Nilai tahanan total pada motor seri :R3 > R2 > R1
Contoh
• Dalam uji unit motor arus searah seri dengan tegangan terminal 230V, memiliki resistansi kumparan jangkar dan medan seri masing-masing 2,4 ohm dan 1,45 ohm serta tegangan jatuh sikat 2 V,.
• Hitung efisiensi dan daya keluaran pada kondisi berbeban, dengan arus motor 10,1A
• Torka yang dihasilkan motor dengan putaran nominal 1500 rpm• Penyelesaian
• Daya input motor (Pin)=(Vt-Vsikat )x IL=228 V x 10,1 A =2.303 Watt
• Pcu =Ia2(Ra+Rfs)=10,12 A2 x (3,85) ohm = 392,74 W
• Pout=Pin-Pcu =2.303Watt-392,74Watt =1910,3 Watt
• Efisiensi = Pout/Pin x 100%=1910,3W/2.303Wx 100% = 82.95%
mNn
PPT outout
12.161315002
3,191060
2
600 w

Latihan
• Dalam uji unit motor arus searah seri dengan tegangan terminal 220V, memiliki resistansi kumparan jangkar dan medan seri masing-masing 0,5 ohm dan 6 ohm serta tegangan jatuh sikat 2,5 V.
• Hitung efisiensi dan daya keluaran pada kondisi berbeban, jatuh tegangan pada jangkar dan medan 220V dengan arus motor 30,5 A
• Torka yang dihasilkan motor dengan putaran nominal 1600 rpm• Penyelesaian
• Daya input motor (Pin)=(Vt-Vsikat )x IL=
• Pcu =Ia2(Ra+Rfs)=
• Pout=Pin-Pcu =
• Efisiensi = Pout/Pin x 100%=
mNn
PPT outout
2
600 w

Motor Kompound
Gambar 3.1 Rangkaian ekivalen motor kompound panjang
Em
Ia Rf1
If2
IL
Rf2
If1
Vt
J B
Tm
• Dari gambar diatas dapat diperoleh formulasi:• IL = If2+Ia …………………….(3.1)• Vt = Em + Ia(Ra+Rfs) ………..(3.2)• If = Vf/Rfp …………….…….. (3.3)• Persamaan-persamaan diatas berlaku untuk motor kompon panjang
maupun pendek.• Untuk motor ini terdapat dua fenomena yang dapat menjadi acuan bagi
karakteristik tegangan terminalnya.• Peningkatan beban pada motor akan berakibat meningkatnya arus beban
(Ia), yang secara langsung akan berakibat meningkatnya pula arus jangkar (IL), berdasarkan persamaan (3.3).
Em
IaRf1
If2
IL
Rf2
If1
Vt
J B
Tm
Gambar 3.2 Rangkaian ekivalen motor kompound pendek
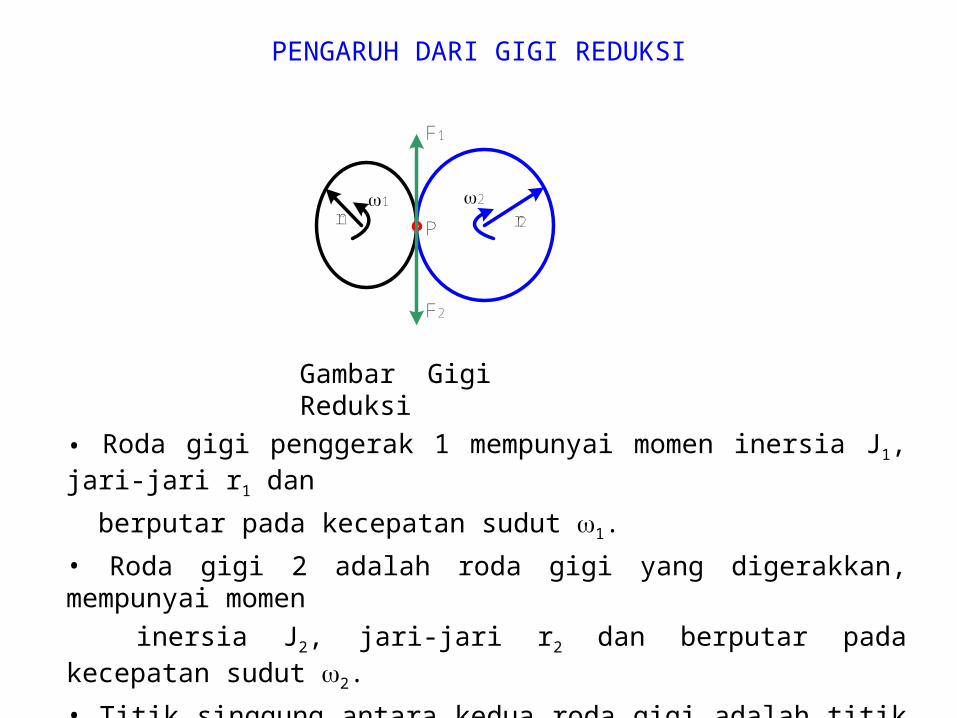
PENGARUH DARI GIGI REDUKSI
• Roda gigi penggerak 1 mempunyai momen inersia J1, jari-jari r1 dan
berputar pada kecepatan sudut w1.
• Roda gigi 2 adalah roda gigi yang digerakkan, mempunyai momen
inersia J2, jari-jari r2 dan berputar pada kecepatan sudut w2.
• Titik singgung antara kedua roda gigi adalah titik P.
Pr1 r2
w1 w2
F1
F2
Gambar Gigi Reduksi

LANJUT
• Untuk memutar roda gigi 2 searah dengan jarum jam,dititik P diperlukan gaya sebesar F2 dengan arah ke atas.
• Dilihat dari roda gigi 1, gaya ini merupakan beban, dan dapat digambarkan sebagai gaya sebesar F1 dengan arah ke bawah.
• Untuk roda gigi 1 berlaku :
dt
dJrFT
dt
dJTT
a
a
11111
1111
w
w
• Untuk roda gigi 2 berlaku :
dt
dJTrF
dt
dJTT a
22222
2222
w
w
• Pada keadaan seimbang, di titik P berlaku :
2211
21
rr
atau
FF
ww

LANJUT
• Penjabaran persamaan tersebut
dt
d
r
J
r
TF a 2
2
2
2
22
w
• Karena F1=F2 maka diperoleh persamaan menjadi;
22
1111
22
11
2
2
1211
12
2
2
12
2
1111
11
2
2
2
2
211
11111
aeka
aa
aa
aa
a
Tr
r
dt
dJT
Tr
r
dt
d
r
rJJT
dt
dJ
r
rT
r
r
dt
dJT
dt
dJ
dt
d
r
J
r
TrT
dt
dJFrT
w
w
ww
ww
w
; Dengan Ta2 adalah momen lawan pada roda gigi 2

LANJUT
• Dengan inersia ekivalen:
2
2
1211
r
rJJJ ek
• Ternyata bahwa terhadap poros roda gigi 1, momen inersia J2 berubah dengan faktor (r1/r2)2:
• Karena jari-jari berbanding terbalik dengan putarannya, maka J1-ek dapat dinyatakan juga sebagai;
2
1
2211
w
wJJJ ek
• Jadi momen beban keseluruhnya adalah:
21
2111 aeka T
dt
dJT
www
LANJUT
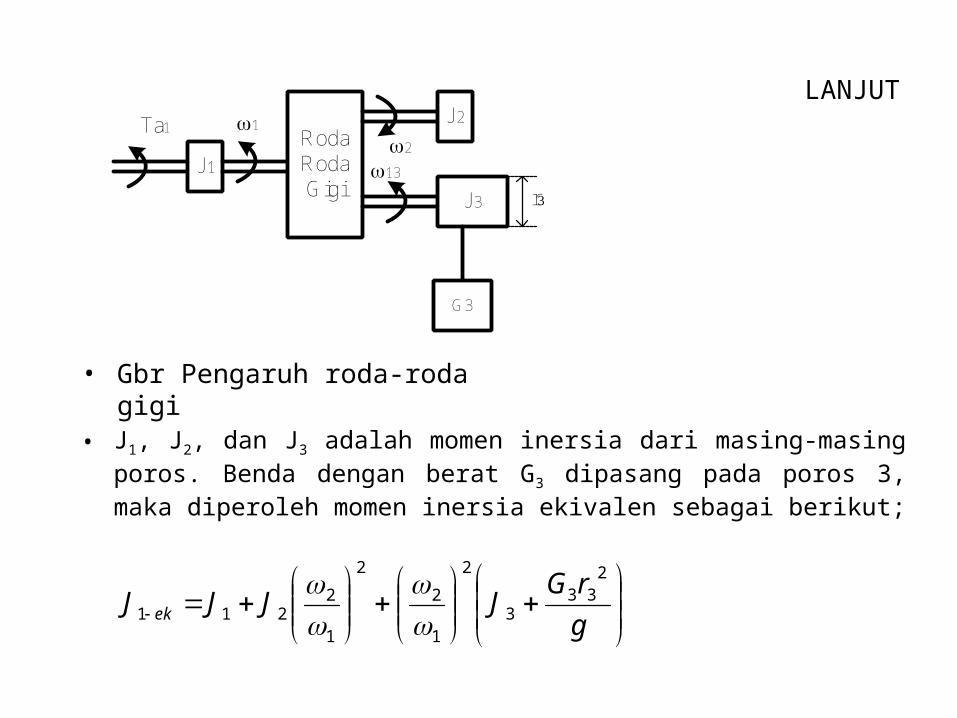
• J1, J2, dan J3 adalah momen inersia dari masing-masing poros. Benda dengan berat G3 dipasang pada poros 3, maka diperoleh momen inersia ekivalen sebagai berikut;
• Gbr Pengaruh roda-roda gigi
g
rGJJJJ ek
233
3
2
1
2
2
1
2211 w
www
J1
RodaRodaGigi
J2
J3
w1
w2
w13
G3
Ta1
r3
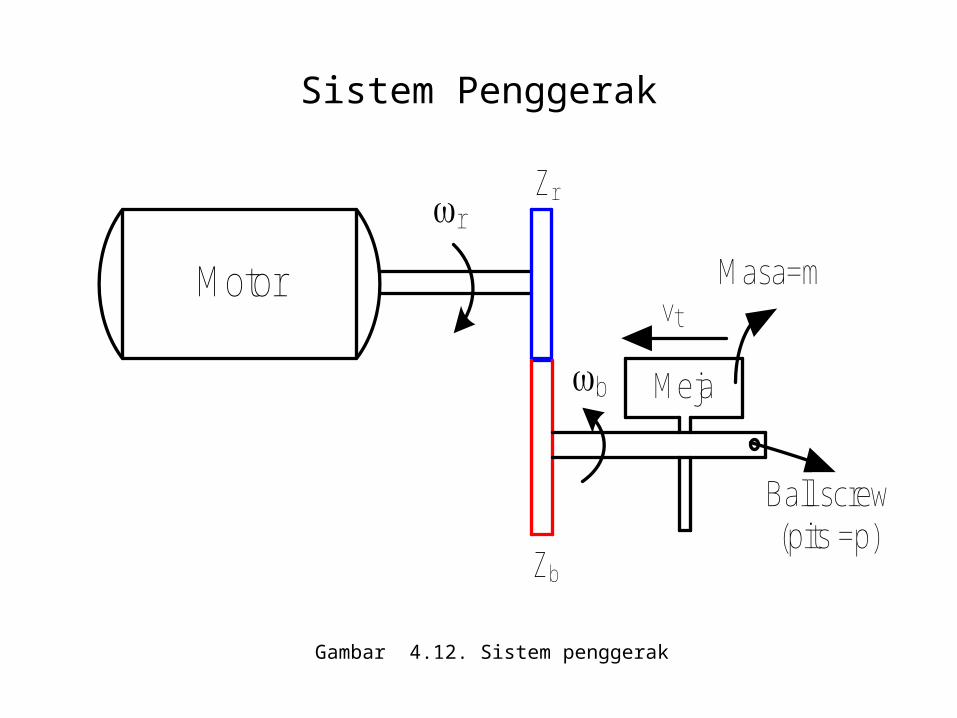
Sistem Penggerak
Gambar 4.12. Sistem penggerak
Motor
Meja
wr
wb
Masa=m
Ball screw(pits =p)
vt
Zr
Zb

Perbandingan putaran motor dan ulir penggerak ditentukan oleh perbandingan jumlah gigi dari reduksinya
Untuk mengetahui time constant dari sistem penggerak ini, inersia beban (meja + ball screw+roda gigi) harus dipindahkan ke rotor dari motornya
Dengan Jeq = inersia ekuivalen yang dinyatakan sebagai berikut:
Keterangan:Jr = inersia motorJrg1=inersia roda gigi 1Jrg2 = inersia roda gigi2Jb =inersia ulir penggerakm = masa dari mejap =pits dari ulir penggerak
wb=kecepatan putaran ulir penggerakwr=kecepatan putaran motor.
Contoh soal
Motor servo dc yang mempunyai rating putaran 500 rpm, dihubungkan ke meja melalui mekanis ball screw-nut dan kotak roda gigi dengan reduksi 2:1 (wb/wr=1/2). Masa meja m=1000kg dan pits dari ulir penggerak p=10mm. Bila torka statis(akibat gesekan dan gaya pemotongan), inersia roda gigi dan bakk screw dapat diabaikan, dengan inersia motor Jr=2,15.10-2 kg-m2.Hitunglah besarnya torka yang diperlukan untuk menggerakan meja (dari kondisi awal diam) dengan kecepatan vt=150mm/detik dalam waktu 0,15 detik ( dianggap saja percepatannya linier)

Penyelesaian
vt=150 mm/detikwb= 2vt/p. rad/detik.wb=150/10 putaran/detikwb=(2.150)/10 rad/detik.wb= 94,25 rad/detikwr=2wb= 188,5 rad/detik.Jeq=Jr+a2[m.p2/(2)2]Jeq = 2,15x 10-2+1/4x[1000.100/(2)2] kg-m2
Jeq =2,21.10-2 kg-m2.danTr=Jeqdw/dtTr=2,21.10-2 kg-m2 x (188,5 rad/detik/0,15 detik)Tr= 27,77 N-m.Untuk beban mekanik 27,77 N-m dibutuhkan suatu spesifikasi
penggerak sebagai berikut: Torka mesin = 125% x Torka beban

LANJUT
• Daya yang dibutuhkan untuk mensuplay beban mekanik tersebut;• Karena dalam perhitungan rugi-rugi mekanik diabaikan, maka
momen beban perlu ditambahkan 25% dari momen beban yang telah dihitung sebelumnya sebesar 6,82 N-m, sehingga total momen beban menjadi 34,6 N-m 1800 rpm, 1,5 Hp
HP 1,52atau 131.1
det/ 36,52 6.34 60
180026,34
WattP
ikradmN
xTP
m
mm
w
Penyelesaian
vt=200 mm/detikwb= 2vt/p. rad/detik.wb=200/10 putaran/detikwb=(2.200)/10 rad/detik.wb= 125,66 rad/detikwr=4wb= 502.65 rad/detik.Jeq=Jr+a2[m.p2/(2)2]Jeq = 4,15x 10-2+1/16x[3000.100/(2)2] kg-m2
Jeq =474,98 kg-m2.danTr=Jeqdw/dtTr=474,98kg-m2 x (502,65 rad/detik/0,10 detik)Tr= 2.3875e+006 N-m.Untuk beban mekanik 27,77 N-m dibutuhkan suatu spesifikasi
penggerak sebagai berikut:

LANJUT
• Daya yang dibutuhkan untuk mensuplay beban mekanik tersebut;• Karena dalam perhitungan rugi-rugi mekanik diabaikan, maka
momen beban perlu ditambahkan 25% dari momen beban yang telah dihitung sebelumnya sebesar 6,82 N-m, sehingga total momen beban menjadi 34,6 N-m
HP 2,04atau 523.1
det/ 36,52 09,29 60
50026,34
WattP
ikradmN
xTP
m
mm
w

PENGHUBUNG MESIN PENGGERAK DENGAN GENERATOR
Agar dapat menghasilkan listrik yang berkualitas tinggi ( tegangan dan frekuensinya stabil ), maka generator harus bekerja pada kecepatan putar ( rpm ) tertentu sesuai rekomendasi pabrik. Agar dapat berputar, generator harus dihubungkan dengan mesin penggerak yang dapat berupa motor bakar, turbin air, turbin uap, kincir angin, kincir air, dsb. Agar pembangkit listrik memiliki kinerja dan efisiensi maksimal, perlu didesain sedemikian rupa sehingga mesin penggerak maupun generator bekerja pada kecepatan putar ideal ( peak speed ) masing-masing. Untuk mencapai keadaan ideal tersebut, diperlukan jenis penghubung yang sesuai dengan perbandingan kecepatan antara shaft mesin penggerak dengan shaft generator. Adapun perbandingan kecepatan putar tersebut ada 3 macam yaitu :
• Pereduksi 1
LANJUT
• 1. Kecepatan putar mesin penggerak sama dengan kecepatan putar generator.Untuk keadaan ini, dapat digunakan sambungan langsung dimana poros mesin penggerak tersambung langsung ( coaxis ) dengan poros generator yang lazim digunakan pada genset motor bensin portable. Alternatif kedua, dapat digunakan direct couple seperti yang digunakan pada mesin pemotong rumput. Alternatif ketiga, dapat digunakan sambungan tidak langsung yaitu sistim pulley-belt atau sistim gear-rantai atau sistim gear to gear ( diameter kedua pulley atau jumlah gigi kedua gir musti sama ).2. Kecepatan putar mesin penggerak lebih rendah daripada kecepatan putar generator.Untuk keadaan ini, diperlukan sistim multiplikasi putaran sebagai penghubung. Jika perbedaan kecepatan putar tersebut tidak terlalu jauh ( lebih dari 1 : 3 ), dapat digunakan sistim multiplikasi tunggal yang cukup sederhana. Adapun sistim multiplikasi tersebut dapat berupa sistim pulley-belt yang terdiri dari sebuah pulley besar pada shaft mesin penggerak dan sebuah pulley kecil pada shaft generator yang dihubungkan oleh sebuah belt. Alternatif kedua, dapat berupa sistim gear-rantai yang terdiri dari sebuah gear ( sproket ) besar pada shaft mesin penggerak dan sebuah gear ( sproket ) kecil pada shaft generator yang dihubungkan oleh sebuah rantai. Alternatif ketiga, dapat berupa sistim gear to gear yang terdiri dari sebuah gear besar pada shaft mesin penggerak dan sebuah gear kecil pada shaft generator yang saling bersinggungan..

LANJUT
• Jika perbedaan kecepatan putar tersebut cukup jauh ( kurang dari 1 : 3 ), perlu digunakan sistim multiplikasi bertingkat yang cukup rumit. Untuk keperluan itu, dapat digunakan gear box type HELICAL sebagai salah satu alternatif yang banyak dipakai.
• Sedangkan gear box type WORM tidak dapat dipakai untuk sistim multiplikasi karena bersifat irreversibel ( tidak dapat dibalik ). Alternatif lain, dapat juga digunakan sistim pulley-belt bertingkat atau sistim gear-rantai bertingkat.
• Adapun banyaknya tingkat, tergantung dari Total Multiplication Ratio ( TMR ) yang diperlukan
• 3. Kecepatan putar mesin penggerak lebih tinggi daripada kecepatan putar generator.Untuk keadaan ini, diperlukan sistim pereduksi putaran sebagai penghubung.
• Jika perbedaan kecepatan putar tersebut tidak terlalu jauh ( kurang dari 3 : 1 ), dapat digunakan sistim pereduksi tunggal yang cukup sederhana.
• Adapun sistim pereduksi tersebut dapat berupa sistim pulley-belt yang terdiri dari sebuah pulley kecil pada shaft mesin penggerak dan sebuah pulley besar pada shaft generator yang dihubungkan oleh sebuah belt.
• Alternatif kedua, dapat berupa sistim gear-rantai yang terdiri dari sebuah gear ( sproket ) kecil pada shaft mesin penggerak dan sebuah gear ( sproket ) besar pada shaft generator yang dihubungkan oleh sebuah rantai.
• Alternatif ketiga, dapat berupa sistim gear to gear yang terdiri dari sebuah gear kecil pada shaft mesin penggerak dan sebuah gear besar pada shaft generator
yang saling bersinggungan.
LANJUT
• Jika perbedaan kecepatan putar tersebut cukup jauh ( lebih dari 3 : 1 ), perlu digunakan sistim pereduksi bertingkat yang cukup rumit. Untuk keperluan itu, dapat digunakan gear box baik yang type HELICAL maupun type WORM sebagai salah satu alternatif yang banyak dipakai.
• Alternatif lain, dapat juga digunakan sistim pulley-belt bertingkat atau sistim gear-rantai bertingkat. Adapun banyaknya tingkat, tergantung dari Total Reduction Ratio ( TRR ) yang diperlukan.Pada sebagian besar pembangkit listrik, kecepatan putar mesin penggerak tidak sama dengan kecepatan putar generator.
• Oleh karena itu, salah satu hal yang harus dilakukan dalam perencanaan sistim pembangkit listrik adalah menjembatani perbedaan kecepatan putar ( rpm ) ideal antara shaft generator dengan shaft turbin.
• Untuk itu, perlu dibuat desain suatu sistim pereduksi atau sistim multiplikasi yang berfungsi mentranformasi kecepatan putar ideal shaft turbin menjadi kecepatan ideal shaft generator tanpa banyak kehilangan daya.
• Secara prinsip, sistim pereduksi atau sistim multiplikasi adalah semua sistim mekanik mulai dari pulley atau gear yang terpasang pada shaft turbin, kemudian gear box ( jika ada ), sampai dengan pulley atau gear yang terpasang pada generator.
LANJUT
• Jadi bukan hanya gear box saja yang merupakan bagian dari sistim pereduksi atau sistim multiplikasi putaran. Demikian juga sebaliknya, sistim pereduksi atau sistim multiplikasi putaran tidak selalu berupa gear box.Adapun perbedaan antara sistim pereduksi dan sistim multiplikasi adalah pada transformasi kecepatan yang dihasilkannya.
• Sistim pereduksi mentransformasikan kecepatan putar tinggi menjadi kecepatan putar yang lebih rendah. Sedangkan sistim multiplikasi mentransformasikan kecepatan putar rendah menjadi kecepatan putar yang lebih tinggi.
• Sistim pereduksi digunakan jika kecepatan putar mesin penggerak ( termasuk turbin ) lebih tinggi daripada kecepatan putar generator. Situasi seperti itu lazim ditemui pada PLTA, PLTU, PLTGU, dan PLTP. Sedangkan sistim multiplikasi digunakan jika kecepatan putar mesin penggerak lebih rendah daripada kecepatan putar generator.
• Situasi seperti itu lazim ditemui pada PLTMH yang menggunakan kincir lintasan sebagai tenaga penggerak. Dalam artikel ini hanya akan dibahas tentang sistim pereduksi saja. Adapun sistim multiplikasi akan dibahas dalam artikel tersendiri jika ada yang request.
SISTIM PEREDUKSI PUTARAN
• Sistim pereduksi putaran yang dibahas di bawah ini dapat diterapkan pada semua jenis pembangkit listrik maupun pada proyek lainnya yang memerlukan sistim pereduksi putaran secara umum.Untuk dapat menentukan jenis pereduksi yang paling tepat dengan kebutuhan, perlu diketahui dulu data teknis dari mesin penggerak dan generator yaitu antara lain :
• a. Kecepatan putar mesin penggerak ( rpm ) yang memberikan efisiensi konversi tertingi ( peak speed ). Kalau diinginkan, boleh juga bukan peak speed ( biasanya diatasnya peak speed ) dengan maksud untuk memperoleh output daya yang lebih besar namun harus rela mengorbankan sedikit efisiensi.
• b. Kecepatan putar generator ( rpm ) yang direkomendasikan oleh pabrik. Kecepatan putar generator musti mengikuti standar dengan toleransi sekitar 2-5 % saja.
• Jika terlalu tinggi atau terlalu rendah melewati batas toleransinya, maka kualitas listrik yang dihasilkan akan berkualitas rendah ( tegangan dan frekuensinya tidak sesuai standar ).
LANJUT
• c. Daya yang yang dihasilkan mesin penggerak ( watt atau HP ) pada kecepatan kerja yang ditetapkan pada bagian a di atasd. Daya dari generator ( watt atau HP ) pada kecepatan kerja yang direkomendasikan pabrik pada bagian b di atasSetelah semua data bagian a-b-c-d tersebut di atas telah lengkap, maka langkah selanjutnya adalah melakukan analisis dan kalkulasi dengan mengikuti langkah-langkah berikut :
• 1. Memastikan bahwa daya mesin penggerak ( data c ) musti 5-10 % lebih besar dari pada daya generator ( data d ) agar sistem dapat bekerja normal sesuai harapan. Hal itu disebabkan oleh kehilangan daya akibat adanya slip dan atau gesekan pada sistim mekanik seperti bearing, gear, belt, rantai, dsb. Kehilangan daya tersebut bisa mencapai 5-10 persen dari daya total.
• Jika ternyata daya mesin penggerak tidak lebih besar daripada daya generator, maka musti dilakukan penggantian / perubahan rencana. Alternatif pertama adalah memperbesar daya mesin penggerak jika memungkinkan. Alternatif kedua adalah mengganti generator dengan daya yang lebih kecil.

LANJUT
• 2. Menghitung Total Reduction Ratio ( TRR ) ideal yang diperlukan berdasarkan data a dan b di atas.3. Setelah mendapatkan TRR ideal, langkah selanjutnya adalah mendesain rangkaian sistim pereduksi yang memiliki TRR aktual yang sama dengan TRR ideal.
• Jika tidak bisa diperoleh yang betul-betul sama, maka bisa digunakan TRR aktual sedikit di atas TRR ideal denan toleransi maksimal 5 %. Adapun pemilihan jenis sistim pereduksi yang akan digunakan, perlu mempertimbangan besar kecilnya TRR dengan pedoman sebagai berikut :• Jika TRR kurang dari 3, dapat digunakan sistim pereduksi sederhana ( lihat gambar ).
• Adapun sistim pereduksi tersebut dapat berupa sistim pulley-belt yang terdiri dari sebuah pulley kecil pada shaft mesin penggerak dan sebuah pulley besar pada shaft generator yang dihubungkan oleh belt.
• Alternatif kedua, dapat berupa sistim gear-rantai yang terdiri dari sebuah gear ( sproket ) kecil pada shaft mesin penggerak dan sebuah gear ( sproket ) besar pada shaft generator yang dihubungkan oleh rantai.

LANJUT
• Jika TRR lebih dari dari 3, perlu digunakan sistim pereduksi bertingkat yang lebih rumit. Untuk keperluan itu, dapat digunakan sistim pereduksi bertingkat baik sistim pulley-belt maupun sistim gear-rantai.
• Adapun banyaknya tingkat, tergantung dari TRR yang diperlukan. Jika TRR kurang dari 3, cukup satu tingkat. Jika TRR antara 3 dan 9, bisa 2 tingkat. Jika TRR antara 9 dan 27, bisa 3 tingkat.
• Dan jika TRR lebih dari 9, perlu dipertimbangkan penggunaan gear box agar tidak terlalu rumit. Adapun gear box yang dapat digunakan dapat dipilih yang type HELICAL maupun type WORM.
• Selain harus memilih rasio yang tepat, pemilihan gear box juga wajib memperhitungkan kekuatan yang harus dipikulnya agar tahan lama dan efisien. Gear box yang terlalu kecil, akan cepat rusak.
• Kalau terlalu besar, boros biaya dan tidak efisien karena banyak kehilangan daya. Mengenai type gear box, yang type HELICAL relatif lebih aman dari pada type WORM jika digunakan untuk memutar beban yang mempunyai momentum anguler yang besar seperti generator.
• Karena bersifat irreversibel, gear box type WORM bisa rontok jika belt penghubung turbin dan gear box putus ketika sedang berputar kencang .

LANJUT
• Hal itu disebabkan oleh momentum anguler generator yang akan memaksa bagian output gear box untuk tetap berputar selama beberapa saat sebelum momentumnya habis dan berhenti. Hal itu tidak akan terjadi pada gear box type HELICAL jika belt tersebut putus karena bersifat reversible.
• Sifat irreversible pada gear box type WORM disebabkan oleh konstruksi gearnya yang berbentuk seperti mekanik pemutar senar gitar. Dengan konstruksi seperti itu, pemutar dapat menggerakkan penggulung senar, tapi penggulung senar tidak bisa menggerakkan pemutar dan jika dipaksa bisa rontok.
• Gear box pada mobil apapun, semuanya type HELICAL, jadi pasti aman dipakai untuk dinamo. Tetapi dapat dipakai hanya jika rasionya cocok. Rumus untuk menghitung rasio gear box type HELICAL ( jika tidak dicantumkan rasionya ) adalah :Sedangkan rasio gear box type WORM lebih mudah dihitung karena rasionya sama dengan jumlah gigi pada gear outputnya.
LANJUT
• Catatan :Jika akan menggunakan sistim pulley-belt atau sistim gear-rantai baik tunggal maupun bertingkat, ada cara menghitungnya tersendiri ( lihat contoh pada gambar ). Demikian juga jika menggunakan sistim gear-rantai, TRR aktual bisa dihitung dengan cara yang sama hanya dengan mengganti diameter pulley menjadi jumlah gigi.
• Hal itu tidak diuraikan panjang lebar disini karena pilihan anda sudah mengarah kepada gear box mobil yang sudah diketahui rasionya. Jika seandainya rasio gear box mobil yang akan dipakai belum diketahui, bisa dibuatkan sketsanya dan keterangan jumlah gigi-giginya serta arah putarannya untuk dihitung secara tepat rasionya.
• Tentu saja harus dihitung sendiri-sendiri secara terpisah untuk tiap-tiap nomor speed ( perseneling ) mulai dari perseneling 1 sampai top speed ( perseneling tertinggi ) yang tersedia. Caranya sederhana asal ada sketsa dan datanya.
• Saya sendiri tidak punya data tentang rasio dari gear box mobil sehingga harus menghitungnya dulu ketika membutuhkan.

LANJUT
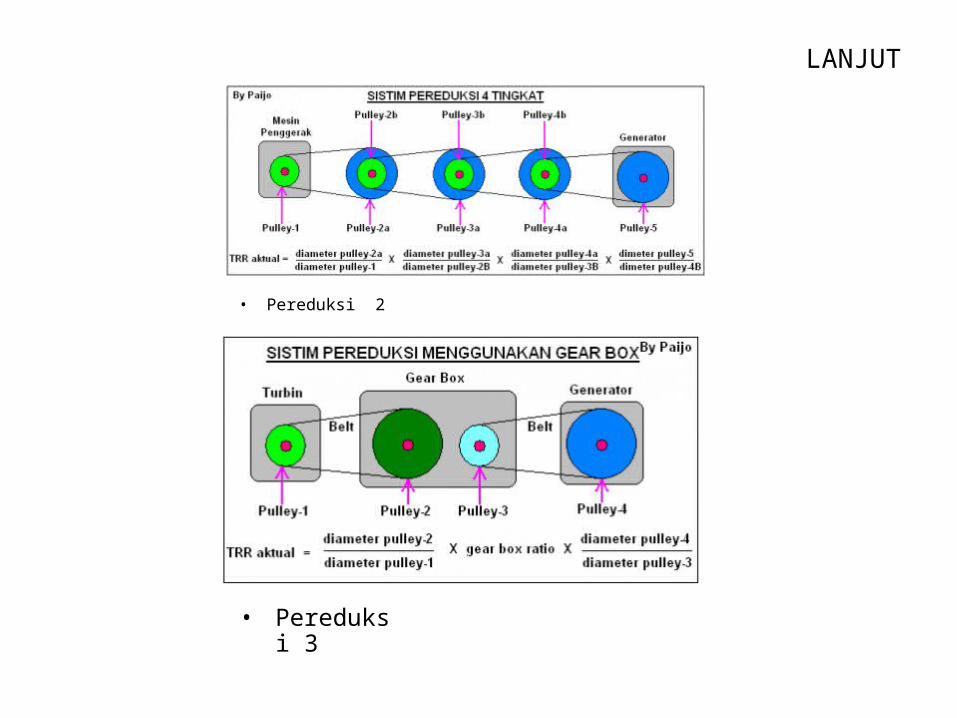
• Pereduksi 2
• Pereduksi 3

• Gear Box

REFERENCE
• [1] Analysis of Electric Machinery, Krause 1987, MC Grawhill International Edition
• [2] Electrical Machines and Drives, Peter Vas 1992, Oxford, ISBN 0 19 859378 3
• [2] Electromechanical Motion Devices, Paul C. Krause, Mc Graw – Hill Book Company, Copyright 1989, ISBN 0-07-100513-7
• [3] Electrical Engineer’s Reference Book, M.A. Laughton CENG,. FIEE,D.J.Warne, CENG FIEE, OXFORD, Six teenth Edition 2003, ISBN 07506 46 373.
• [4] Dasat Teknik Tenaga Listrik, Zuhal 1992, PT Gramedia Jakarta 1992