motori superconduttivi 2
TRANSCRIPT

Applicazioni della Superconduttività
MOTORI HTS
Corso di Laurea in Scienza dei Materiali
Cristian Pira
UNIVERSITÀ DEGLI STUDI DI PADOVA

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Motore DC a spazzole
statore
rotoreCircuito di armatura(o di rotore)

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Motore Universale(o con statore con filo avvolto)
statoreCircuito di eccitazione (o di statore)
rotoreCircuito di armatura(o di rotore)

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Principio di funzionamento

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Step Motor Ibridi

Ciclo di 4 passi del Motor Step

Step Motor a Magneti Permanenti

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Classificazione motori elettrici
Motori DC
• Motore a spazzole
• Motore universale
• Motore brushless
• Motore passo passo
Motori AC
• Motore Monofase
• Motore Trifase
• Sincrono
• Asincrono
• Motore universale
• Motore brushless

Motore Asincrono Trifase

Storia
1885 – Galileo Ferraris dimostra come produrreun campo magnetico rotante
1888 – Tesla brevetta il primo motore asincrono
1889 – George Westinghouse acquista i brevettie fonda la Westinghouse Electric Corporation

Campi magnetici rotanti
H
La circolazione nel solenoide di una corrente alternata sinusoidale
produrrà lo sviluppo lungo il suo asse x di un campo sinusoidale

Campi magnetici rotanti
h(t)
La circolazione nel solenoide di una corrente alternata sinusoidale
produrrà lo sviluppo lungo il suo asse x di un campo sinusoidale

Campi magnetici rotanti
La circolazione nel solenoide di una corrente alternata sinusoidale
produrrà lo sviluppo lungo il suo asse x di un campo sinusoidale
h(t)

Campi magnetici rotanti
La circolazione nel solenoide di una corrente alternata sinusoidale
produrrà lo sviluppo lungo il suo asse x di un campo sinusoidale
Si dimostra che:
h(t)

Campi magnetici rotanti
RICAPITOLANDO:
campo magnetico espresso come due vettori H/2 rotanti in verso opposto
SI DEDUCE CHE:
posso sovrapporre due o più campi sinusoidali
IN QUESTO MODO:
annullo una componente e ottengo un campo rotante di intensità costante

Campo rotante bifase
ΙD1 + D2Ι= HM/2 + HM/2

Campo rotante trifase
ΙD1 + D2+D3Ι = HM/2 + HM/2 + HM/2 = 1,5HM

Rotore e Statore


Principio di funzionamento
n1 = velocità campo magnetico rotante (velocità di sincronismo)n2 = velocità rotoreI2 = corrente indottaB = campo magneticoFe = forza elettromagnetica
f = frequenza di alimentazionep = numero di coppie polaris = velocità di scorrimento
n1= f 60 / p (giri/minuto)
s = (n1 – n2) / n1

Principio di funzionamento
v rotazione dell'albero < v rotazione del campo magnetico:
non c'è sincronismo tra le due velocità

Coppia motore asincrono
𝑠=𝑛1−𝑛2𝑛1

50 Hz vs 60 Hz

Pro - Contro
Peso e ingombro ridotti(a parità di potenza)
Autoavviante(sviluppa spontaneamente e automaticamente la coppia motrice necessaria variando la propria velocità)
Elevata corrente di spunto(4-10 volte maggiore della corrente assorbita a pieno carico)
Coppia e velocità non regolabili(necessità di elettronica di potenza)






Motore sincrono

Principio di funzionamento
𝑛= 𝑓 ∙60𝑝 ( 𝑔𝑖𝑟𝑖
𝑚𝑖𝑛𝑢𝑡𝑜 )

Rotore Macchina Sincrona

Rotore Macchina Sincrona

Avviamento Motore Sincrono
• Avviamento del sincrono come asincrono
• Avviamento mediante l’eccitatrice
• Avviamento mediante motore di lancio

Coppia motore sincrono

Pro - Contro
Velocità di rotazione precisa e stabile(variabile con inverter)
Non autoavviante(necessità di un sistema di avviamento)
Coppia e velocità non regolabili(necessità di elettronica di potenza)





Filosofia auto ibrida

Filosofia auto ibrida (2)

Filosofia auto ibrida (3)

Filosofia auto ibrida (4)
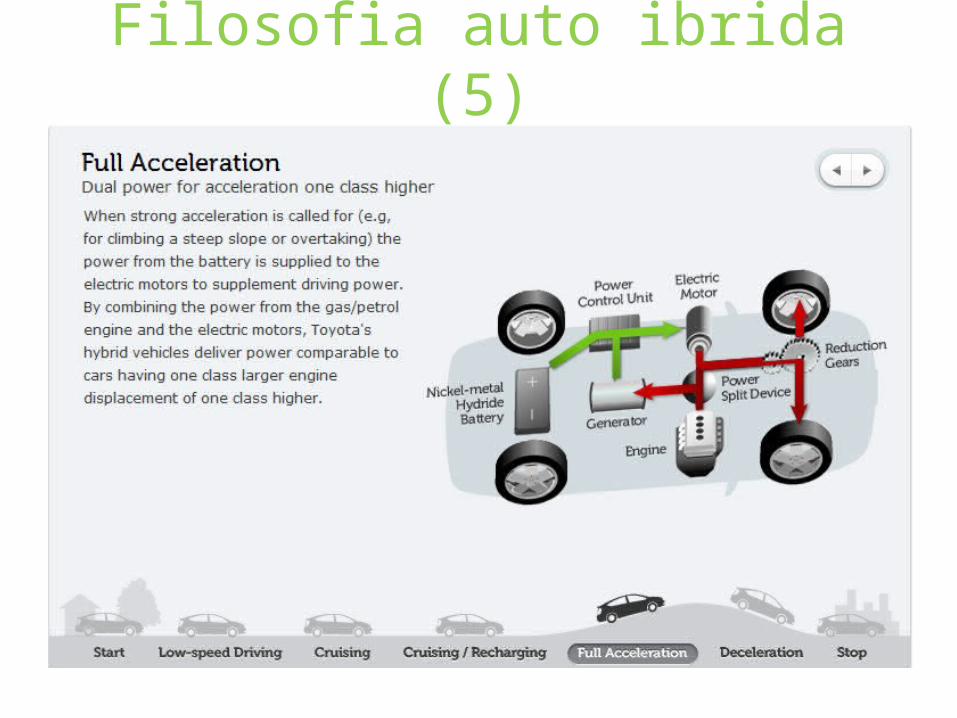
Filosofia auto ibrida (5)

Filosofia auto ibrida (6)

Filosofia auto ibrida (7)

Toyota Prius





Motori HTS

Perché?

Motivazioni

Un po’ di numeri

Dimensioni VS Potenza
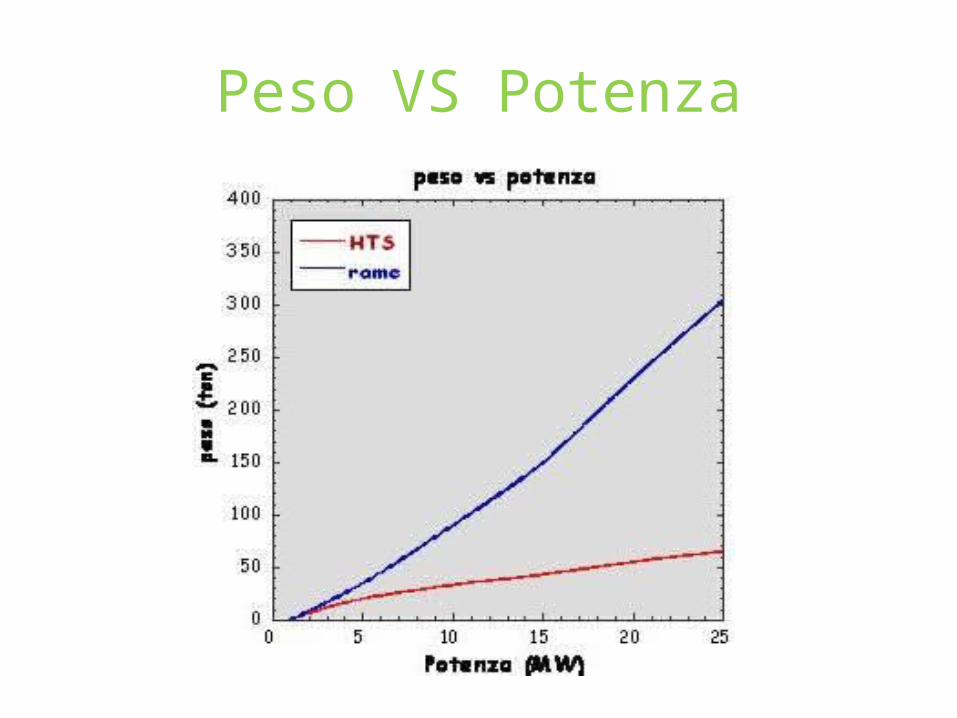
Peso VS Potenza

Rendimento in funzione del carico

Applicazioni in fase avanzata di studio



- received (with partner Reliance Electric) $10.2 million in Department of Energy Strategic Partnership Initiative awards in 1996 for cost-shared development of high-horsepower, commercial-scale motors;
- received a $10-million investment from Électricité de France, the French power company, in April 1997; and
- raised $27 million via a second public stock offering in February 1994.

• 2003 consegnata alla U.S. Navy il motore 5 MWadatto a navi offshore o propulsione ibrida
• 2004 definito il progetto del motore a 27 MW
• 2007 consegnata alla U.S. Navy il motore 27 MWadatto a navi da crociera e militari



Alternativa giapponese

Motore Radiale

Motore Assiale

Coppia Motore
T= coppia del motoreKt = costante empiricaBm = campo Magneticoip = densità di correnteD = diametro del motore
Kt è maggiore del 15% nei motori radiali rispetto ai motori assiali

Vantaggi Motore Assiale
1. Raffreddamento semplificato
2. Bobine superconduttive fisse
3. Sistema Brushless
4. Elevata affidabilità

Spaccato Motore Assiale

Motore 365 kW (2007)

Statore HTS
• Il circuito di armatura è composta da 6 bobine HTS con core in Ferro
• 3 Fasi
• I cavi sono costituiti di DI-BSCCO ((Bi,Pb)2Sr2Ca2Cu3O8+x)
Tc= 110 K Ic = 170-200 A (77K)
• Lo statore è raffreddato in azoto liquido

Specifiche Motore HTS 365 kW

Propulsore 800 kW

Propulsore 800 kW

Tecnologia EDS

EDS (Sospensione ElettroDinamica)
• Levitazione indotta da una forza repulsiva il campo magnetico prodotto dagli elettromagneti e il campo indotto sulle bobine ai lati della rotaia
• A basse velocità il campo indotto non è sufficiente a produrre la levitazione del treno

Sistema di propulsione e guida per EDS
• Motore a propulsione lineare sincrono come per i Maglev EMS
• Sistema elettronico di guida per stabilizzare la posizione del treno

Auto HTS
Prototipo 1 Prototipo 2

Configurazione

Motore superconduttivo

Vano motore Prototipo 1

Test Drive Prototipo 1

Performance Prototipo 1

Performance Prototipo 2

Performance
La società afferma che le auto HTS percorrono il
10% di strada in più rispetto ad un’auto elettrica