nakashima presentation
TRANSCRIPT

インターンシップ成果報告at ナカシマメディ
カル
ミーシャ・ブルックス ハーバード大学2014
2011.8.25

研修概要 膝関節、人工関節に関する知識習得 メディカルとプロペラの工場と R&D センターの
見学 MV プログラム Scott Banks の論文の要約 「 Joint Track 」人工関節の3次元挙動解析 オイラー角
研修期間
7 月4日~8月25日

膝関節・人工関節について 膝関節に関する仕事をするために詳しく(人工)
膝関節について勉強することが必要考察したこと 人工関節とインプラントの歴史 膝の仕組み 適応となる主な病態⇒OA, RA 変形膝関節疾患の治療 インプラントの種類 合併症

メディカルとプロペラの工場と R&D センターの見学

MV プログラム 医療機関から提供頂いた医用画像( CT 画像)を用
いて3次元骨モデルを構築する 大腿骨・脛骨・腓骨の認識とセグメンテーション
を学習した。 CT画像の骨の部分がはっきり映るように骨の領
域に色を塗る(白と黄色)

Scott A. Banks, PhD
University of Florida 機械工学科と航空宇宙工学科(アメリカ)
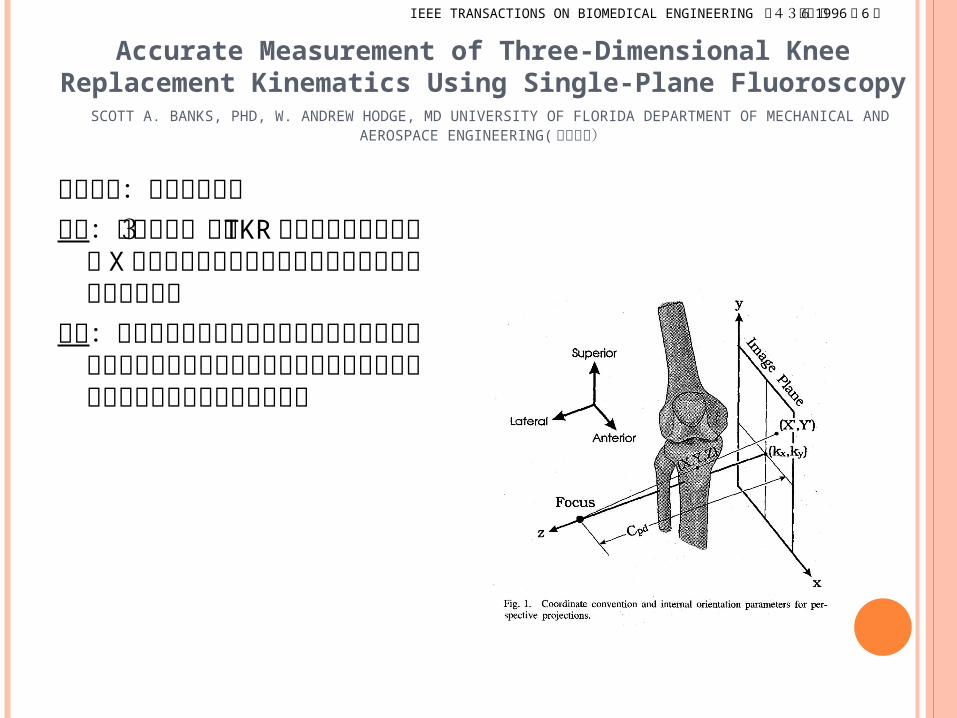
Accurate Measurement of Three-Dimensional Knee Replacement Kinematics Using Single-Plane
Fluoroscopy SCOTT A. BANKS, PHD, W. ANDREW HODGE, MD UNIVERSITY OF FLORIDA DEPARTMENT OF MECHANICAL AND
AEROSPACE ENGINEERING( アメリカ)
調査対象:膝の人工関節目的:動作中に3次元 TKR運動学の計測のための X 線透視法に基づいている技術の実行可能性分析を行う
方法:フルオロスコープの撮像幾何と人工関節の表面形状を与えられたコンピューターは実験的に取得された膝画像に合わせる
IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING 第43巻6号 1996年 6月

A【 . 総括】 X 線透視法で人工関節の2 D シルエットを与えてこの画像の抽出した輪郭を精密な幾何学的な人工モデルに基づいて計算された輪郭と比べる→ TKRコンポーネントが見積もられる
B.【形表現】WallaceとWintzの2 D 物体認識技術が基礎である。正規化フーリエ記述子( Normalized Fourier Descriptors NFD)が輪郭を表現する
C.【整合 /姿勢の推定】どちらのライブラリー内容(エントリー)が入力NFDによく似るか決定する。
D.【画像収集 /位置】フルオロスコープ( P1808、 Precise Optics、 Bay Shore、 NY、 0.3mmスポットサイズ)のビデオ出力は Hi 8ビデオテープに録音される。ビデオフレームはフレーム取込み器と単枠コントローラーでデジタル化される( 752 x 480 x 24ビット)。画像を8ビットグレースケールに変換して 640 x 480スクエアピクセルに縮小される。

E.【コンピューターモデル研究】理想的な条件下で姿勢推定技術の精度を評価するためにコンピューターモデル研究を行った
F.【 in vitro研究】膝人工関節の大腿骨コンポーネントと脛骨コンポーネント (Omnifit 7000, Osteonics Corp., Allendale, NJ)を設置した

結果:A.【コンピューターモデル研究の結果】・回帰分析によると推定誤りは大腿骨コンポーネント位置と相関がなかった( p=0.1)
B.【インビトロ研究】表 III姿勢推定誤りはモデル実験データの平均偏差によって計算される

考察:結果は透視図の直観的理解と一致している。理想的な条件下で、非常に正確な位置と姿勢の見積もりは有り得る
見解:以前の物体認識技術を広めることで2次元蛍光透視像からの人工膝関節置換術後の動作を計測するための6自由度( DOF)の方向 /位置(3 D)推定器を実行した。
定量比較データは正確な性能と計測力学に基づいている高度な機械の設計を許容する

2003 HAP PAUL AWARD PAPER OF THE INTERNATIONAL SOCIETY FOR TECHNOLOGY IN ARTHROPLASTY: DESIGN AND ACTIVITY DEPENDENCE OF
KINEMATICS IN FIXED AND MOBILE-BEARING KNEE ARTHROPLASTIESSCOTT A. BANKS, PHD, W. ANDREW HODGE, MD UNIVERSITY OF FLORIDA DEPARTMENT OF MECHANICAL AND AEROSPACE
ENGINEERING( アメリカ)
目的:健康な膝の拘束を再現できる人工関節がない。人工膝関節の本来の拘束が設計通りに動くか判断すること。そして本来な拘束が変化しながら膝運動のパターンが屈曲範囲で変化するか判断すること。
検体: 45 人( 59 膝)、インプラント 5 種類(表1)
The Journal of Arthroplasty Vol. 19 No.7 2004
方法階段昇降:フルオロスコープ 10 フレーム /秒で歩行 : フルオロスコープユニット、前半分の歩行サイクル時(歩行早期から立脚期まで)膝画像・ビデオ 30 フレーム /秒で
表① 研究したインプラントデザインの種類

結果 全ての膝を三つのグループに別けた: posterior stabilized( PS )、 cruciate retaining ( CR )、 mobile-bearing ( MB )
歩行と階段昇降の立脚期のキネマティック比較、歩行と階段昇降におけるインプラントグループの膝キネマティック

考察
膝動作を拘束することを目的としているインプラント特徴は設計されたとおり動くことがわかった。
膝グループを比較CR 膝タイプ1と2⇒拘束されていないインプラントデザインにみられる。そして、それは ACL と半月板に疾患がある膝と一致している .タイプ4⇒ CR/PS 動作の間と歩行 /階段の間に変化は一番少ない→矢状面シングルラディウス大腿骨コンポーネントとカーブ 脛骨インサートは動作の屈曲位においても適合が高いド
PS 膝は屈曲の脛骨大腿骨変位に明確な拘束を供給したRO 膝は伸展の変位に明確な拘束を供給した

理想の膝動作の本来のコントロール =優れた性能
この研究は膝変性関節炎に苦しんでいる人へ医療を提供するために、様々な設計手法を評価・比較・進化させる客観的な詳細情報を提供する
安定な膝の場合患者さんは関節安定の為にハムストリングを使うことが少ない=extensor mechanism(伸筋機構)はもっと効果的で関節の筋負担が減る
安定な膝の場合患者さんは関節安定の為にハムストリングを使うことが少ない=extensor mechanism(伸筋機構)はもっと効果的で関節の筋負担が減る

Dynamic Activity Dependence of In Vivo Normal Knee Kinematics Taka-aki Moro-oka, Satoshi Hamai, Hiromasa Miura, Takeshi Shimoto, Hidehiko Higaki, Benjamin J. Fregly, Yukihide Iwamoto, Scott A. Banks
University of Florida(アメリカ ), 九州大学 (日本 ),九州産業大学 (日本 ), The BioMotion Foundation(アメリカ )
Journal of Orthopaedic Research April 2008
目的: 3つの運動(ひざまずくこと、しゃがんだ、階段昇降)で健康な膝を解析(伸展から最大限の膝屈曲まで、高分解能動的な平面検出器画像) 検体: 健康な男性6人(平均 29 歳平均体重 69kg ) 方法:膝キネマティックモデルを登録する理想的な方法はMRIから構築された関節面で行った表面評価があるCTから構築された骨モデルを使うことかもしれない ひざまずくこと⇒ 90°から最大限の快適な屈曲までしゃがんだ⇒立っている設置から最大限の快適な屈曲まで階段昇降⇒上昇フェーズ 70°から 10° 屈曲まで

前に報告された形状マッチング技術で3 D 設置と方向が分かる
CTモデルは X 線画像に打ち出して手で骨画像と合わせた
人工マッチングアルゴリズムで骨モデルの登録を洗練
関節キネマティックはオイラー角で骨の3 D 設置から決定される

結果
運動によって骨キネマティックは違う
接触場所を評価する地区はCT モデルに対して不ぞろいな形でMRモデルに対して一貫して円形か楕円形だった

考察 考察:計算方法によって膝軸回転は違った。 しゃがんだと階段昇降の接触場所は大体同じ しゃがんだ⇒最大回転と最後部側面接触、ひざまずくことより最大屈曲角と脛骨回転レート( 100°から最大屈曲まで)は大きかった
外側大腿骨顆はシリンダー形の軸が脛骨周辺を上回っても脛骨関節面と適当な接触がある
健康な膝は形状的な関節合同を保持しながら様々な活動と中で行動の範囲を適応出来る

Dynamic Identification of a Mitsubishi PA10-6CE Robot using Motion Capture Chris Lightcap and Scott Banks University of Florida機械工学科と航空宇宙工学科
(アメリカ)
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 – Nov 2,2007
目的:モーションキャプチャで剛性リンク柔軟関節ロボットモデルにある動的パラメーターを見つける方法
方法:1)ロボットダイナミックは剛性トルクを除くように新しい形にパラメーター化されてデータ・セットで計算された2)剛性トルクを新しいパラメーター・セットからリーコンストラクトしてトーションバネを計測データに合わせる

マーカークラスターを4つのリンクの外表面に設置する

考察柔軟関節ロボットモデルはMitsubishi
PA10-6CEの動作をちゃんと表現する この方法で計算するマトリクスは小さくなってリ
グレッサートマトリクスとトルク計測は改良される

Joint Track 人工関節の3次元挙動解析 3つのファイルを読み込むことが必要:骨の画像
ファイル、インプラントの3Dモデル、キャリブレーション
正しくロード出来たら二つの画面が出る マッチング

6つのグラフが出る:xyz回転とxyz変位 ファイルの名前を JTS から CSV に変えることで
Excel で Joint Track のデータが見られる
J T_EULER_312 x_tran y_tran z_tran z_rot x_rot y_rot14.78583 - 2.63618 - 963.18 - 85.4363 1.009899 - 89.054314.85465 - 3.29502 - 963.048 - 85.7154 1.574051 - 89.8091
13.392 - 4.1206 - 963.008 - 84.8586 1.839676 - 90.366811.79004 - 4.62417 - 967.499 - 84.3369 2.15712 - 90.981611.51878 - 4.56604 - 972.293 - 82.7354 1.92564 - 91.153912.34055 - 4.53453 - 1001.82 - 81.5149 2.175621 - 91.501412.49073 - 4.44558 - 1009.59 - 83.7227 2.694747 - 92.158111.02181 - 3.91884 - 1014.44 - 83.2118 2.551247 - 92.00049.64579 - 4.983 - 1019.43 - 84.1223 2.483366 - 92.531
9.671775 - 4.83821 - 1023.15 - 83.1131 2.618109 - 92.881510.08067 - 4.3791 - 1023.33 - 84.8625 2.883668 - 93.15579.576035 - 4.79473 - 1028.51 - 85.2078 3.214056 - 93.45837.931051 - 4.92697 - 1033.1 - 84.6425 3.380182 - 93.34646.449153 - 5.31761 - 1033.12 - 83.7484 3.457219 - 93.48956.449153 - 5.31761 - 1033.12 - 83.8828 4.311107 - 93.5774

オイラー角
出力される値は絶対座標値であるため、膝の動作を判断しにくい
それゆえにオイラー角を使うことが必要になる
3つの軸:x、y、z回転マトリクス連立方程式

概念 全ての回転は3つの角で定義される回転は回転マトリクスとして書かれる 3つの回転マトリクスを定義する角をオイラー角
と呼ぶ
B= C= D=1 0
00 cosφ
sinφ 0 -sinφ
cosφ
c osψ sinψ
0-sinψ cosψ
0 0 0
1
c osθ 0 -sin θ
0 1 0
sin θ 0 cos θ
X軸周りの回転 Y軸周りの回転 Z軸周りの回転
元データX,Y,Zの変位

計算
計算した数字を入れて
(X tib ,Y tib ,Z tib )=(X fem ,Y fem ,Z fem )
Φ 、 θ 、 ψ を求めるために連立方程式を解く Φ :内外反 θ :回旋角度 ψ :屈曲角度

感想

聞いてくださってありがとうございました!
ご意見やご質問がありましたら お聞かせ下さい
Thank You For Listening!!!