p2 calmettes tds
TRANSCRIPT

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 1/30
Travaux Diriges d’Automatique
–
Commande des SystemesLineaires Continus
⋄ M1 ⋄
U.E. Csy – module P2
Annee 2014–2015

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 2/30
2
Ecole des Mines Albi Carmaux CSy – P2
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 3/30
Les seances de Travaux Diriges de commande des systemes lineaires continus –notees TD5, TD6,. . . dans votre emploi du temps – sont reparties sur 11 creneaux de 1h30.La sequence conseillee est la suivante :
— Probleme no1 – Analyse d’un processus chimique
TD5 → modelisation et debut de la correction proportionnelle ;TD6 → fin de la correction proportionnelle ; etude d’une perturbation et debutde la correction integrale ;TD7 → fin de la correction integrale et correction PI.TDM2→ Analyse et simulation a l’aide de Matlab jusqu’a la correction PI incluse ;TDM3 → Analyse et simulation a l’aide de Matlab, correction PID.
— Probleme no2 – Regulation de temperature
TD8 →
jusqu’a la question 4 incluse ;TD9 → de la question 5 a la fin.
— Probleme no3 – Asservissement de niveau dans un bac, Synthese de correcteurs P.I.
TD10 → jusqu’a la question 5 incluse ;TD11 → de la question 6 a la fin.
— Probleme no4 – Asservissement de position angulaire, Synthese d’un correcteurAvance de Phase
TD12
→methode du modele et debut des caracteristiques harmoniques de l’avance
de phase;TD13 → fin caracteristiques harmoniques et application a l’asservissement.

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 4/30
4
Ecole des Mines Albi Carmaux CSy – P2
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 5/30
Probleme no
1
Analyse d’un procede chimique
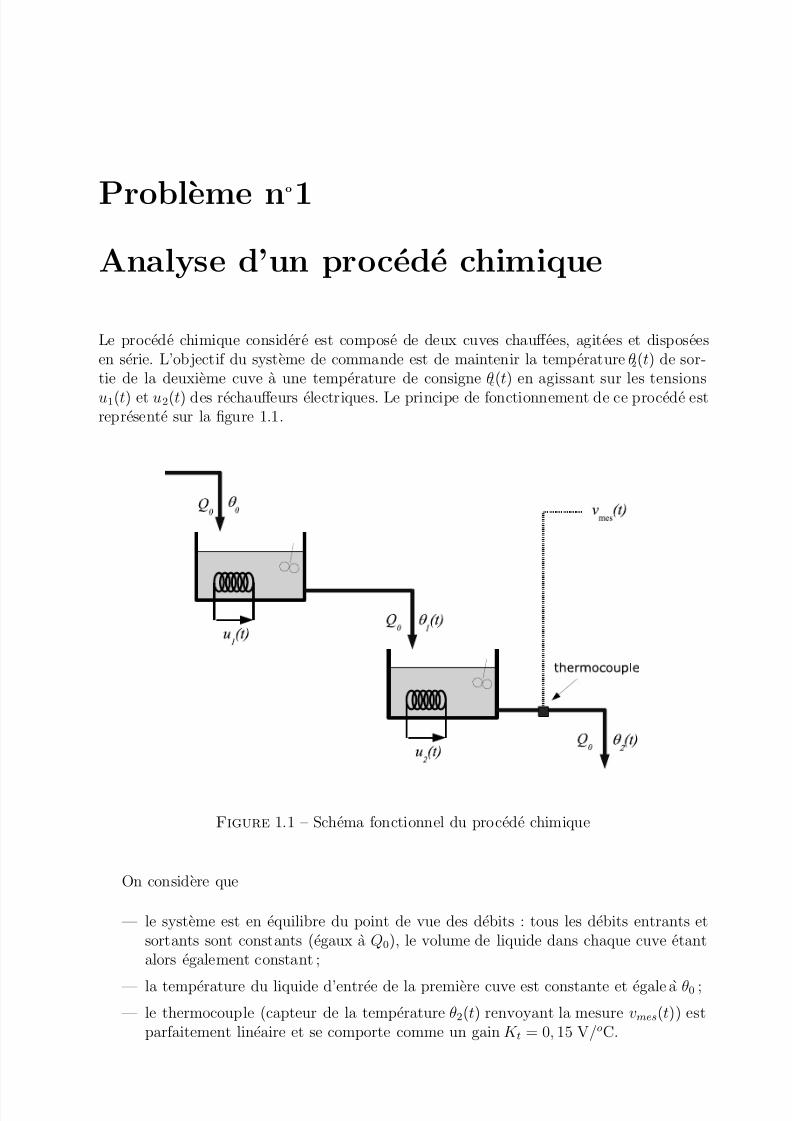
Le procede chimique considere est compose de deux cuves chauffees, agitees et disposeesen serie. L’objectif du systeme de commande est de maintenir la temperature θ2(t) de sor-tie de la deuxieme cuve a une temperature de consigne θc(t) en agissant sur les tensions
u1(t) et u2(t) des rechauffeurs electriques. Le principe de fonctionnement de ce procede estrepresente sur la figure 1.1.
Figure 1.1 – Schema fonctionnel du procede chimique
On considere que
— le systeme est en equilibre du point de vue des debits : tous les debits entrants etsortants sont constants (egaux a Q0), le volume de liquide dans chaque cuve etantalors egalement constant ;
— la temperature du liquide d’entree de la premiere cuve est constante et egale a θ0 ;
— le thermocouple (capteur de la temperature θ2(t) renvoyant la mesure vmes(t)) estparfaitement lineaire et se comporte comme un gain K t = 0, 15 V/oC.

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 6/30
6 1. ANALYSE D’UN PROCEDE CHIMIQUE
Ce systeme n’est pas lineaire dans son fonctionnement global (echanges thermiques). Tou-tefois, en considerant un point de fonctionnement du systeme et des petites variations desdifferents signaux autour de ce point, l’analyse peut raisonnablement se faire sur un modelelinearise. C’est dans cette hypothese que nous travaillons ici.
1.1 Modelisation (modele de representation autourd’un point de fonctionnement)
Plusieurs experiences ont ete menees sur le procede a partir de l’etat d’equilibre choisicomme point de fonctionnement (on notera d’une ⋆ les variations autour de ce point) :
— une variation de type echelon de 0.1 volt sur l’entree u1(t) a conduit a l’evolutionde la temperature θ1(t) representee sur la figure 1.2 ;
0 500 1000 1500 2000 2500 3000 35000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
temps (sec)
r é p o n s e θ 1
( t )
Figure 1.2 – Reponse θ1(t) a un echelon d’amplitude 0.1 volt
— une augmentation de u2(t) de 10 a 12 volts a pour consequence une augmentationde la temperature θ2(t) de 85 a 90oC avec un comportement semblable a celui d’unmodele du premier ordre ; u2(t) atteint 95% de sa variation totale (variation de4.75oC) au bout de 30 minutes (1800s) ;
— on donne la fonction de transfert G3( p) = Θ⋆
2( p)
Θ⋆1( p)
= 11+1200 p
.
1. Ecrire les fonctions de transfert G1( p) = Θ⋆
1( p)
U ⋆1 ( p) et G2( p) =
Θ⋆2( p)
U ⋆2 ( p) ;
2. Commenter la fonction de transfert G3( p) ;
3. Dessiner le schema bloc du procede.
Ecole des Mines Albi Carmaux CSy – P2
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 7/30
1.2. ASSERVISSEMENT EN TEMPERATURE DU PROCEDE 7
1.2 Asservissement en temperature du procede
1.2.1 Correction proportionnelle sur la commande u2(t)
On souhaite asservir le systeme avec une correction elementaire (correction proportionnellede gain K ) sur le signal u2(t). Le signal de consigne sera note θc(t).
L’analyse se fait autour du point de fonctionnement.
1. Dessiner le schema bloc de l’asservissement ;
2. Discuter des notions d’asservissement et de regulation du systeme ;
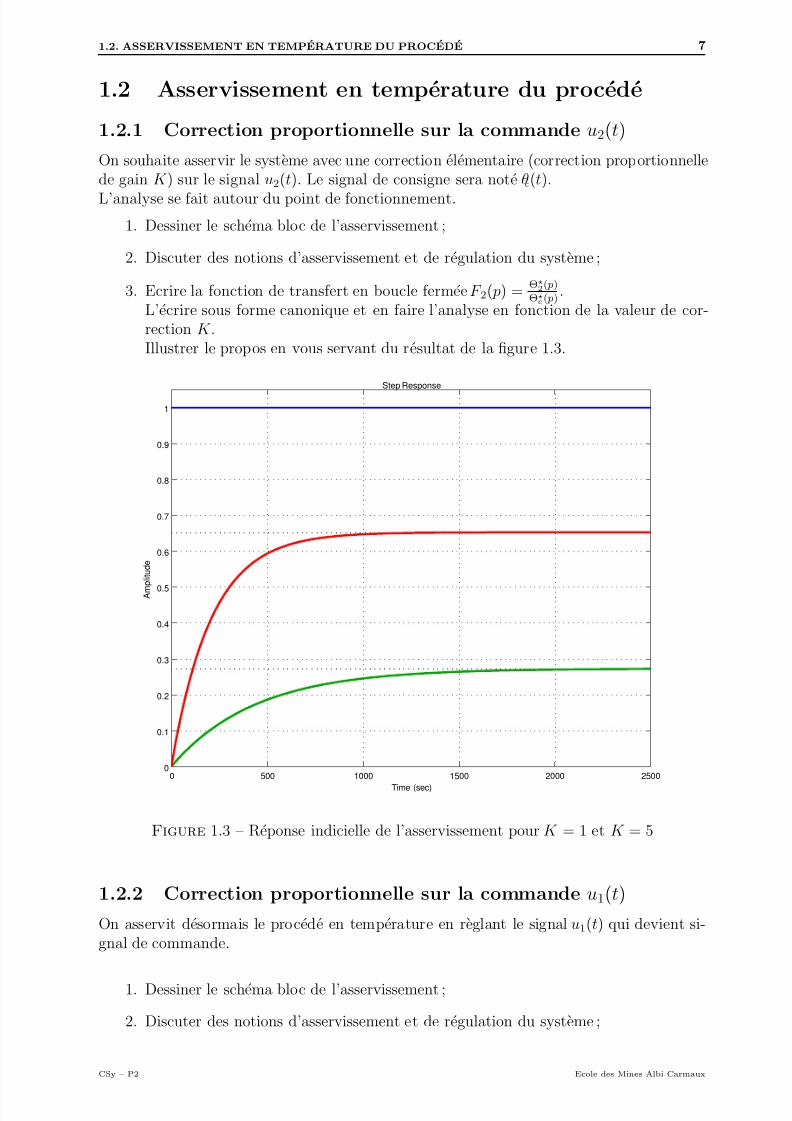
3. Ecrire la fonction de transfert en boucle fermee F 2( p) = Θ⋆
2( p)
Θ⋆c( p)
.L’ecrire sous forme canonique et en faire l’analyse en fonction de la valeur de cor-rection K .Illustrer le propos en vous servant du resultat de la figure 1.3.
0 500 1000 1500 2000 25000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (sec)
A m
p l i t u d e
Figure 1.3 – Reponse indicielle de l’asservissement pour K = 1 et K = 5
1.2.2 Correction proportionnelle sur la commande u1(t)
On asservit desormais le procede en temperature en reglant le signal u1(t) qui devient si-gnal de commande.
1. Dessiner le schema bloc de l’asservissement ;
2. Discuter des notions d’asservissement et de regulation du systeme ;
CSy – P2 Ecole des Mines Albi Carmaux
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 8/30
8 1. ANALYSE D’UN PROCEDE CHIMIQUE
3. Ecrire la fonction de transfert en boucle fermee F 1( p) = Θ⋆
2( p)
Θ⋆c( p)
.L’ecrire sous forme canonique ;
4. Donner l’expression du gain statique de F 1( p) en fonction de K . Commenter ;
5. A partir de l’application numerique, calculer les poles de la fonction de transfert
F 1( p). Discuter de leur nature (et du comportement dynamique de l’asservisse-ment) en fonction de la valeur de K . Tracer succinctement, dans le plan complexe,l’evolution des poles de F 1( p) en fonction de K . Analyser le comportement dyna-mique de l’asservissement en fonction du gain de correction K ;
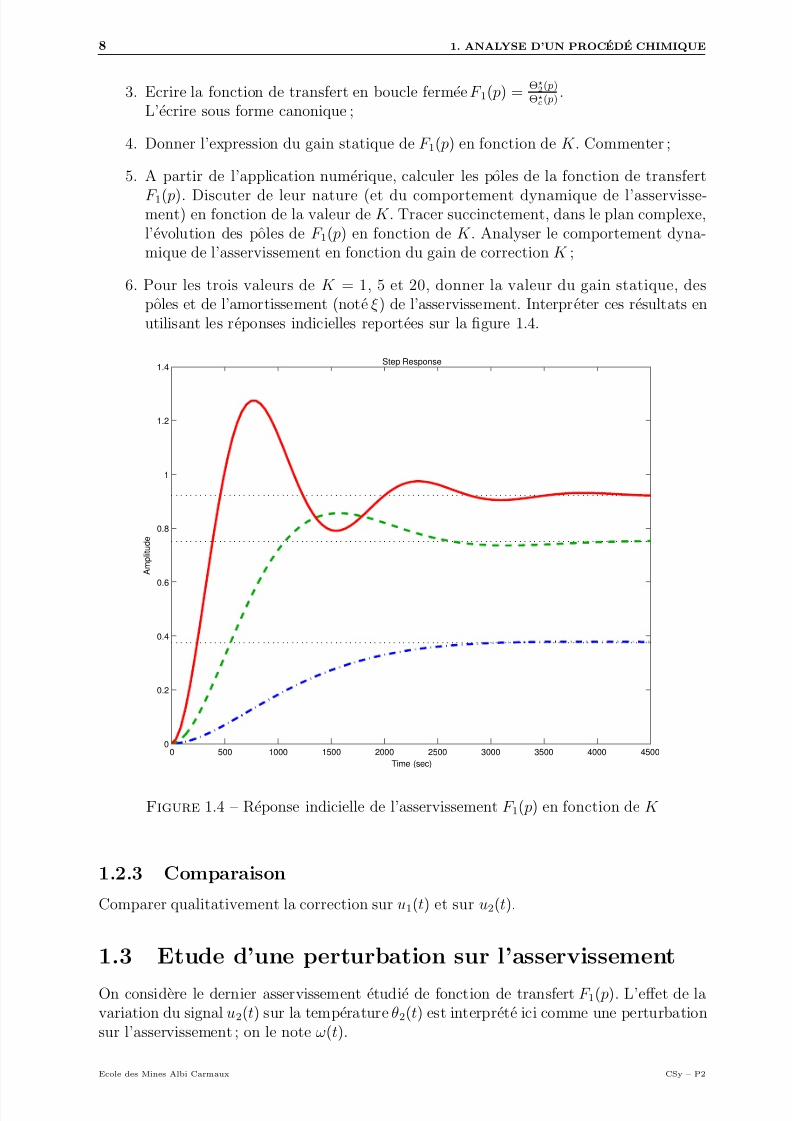
6. Pour les trois valeurs de K = 1, 5 et 20, donner la valeur du gain statique, despoles et de l’amortissement (note ξ ) de l’asservissement. Interpreter ces resultats enutilisant les reponses indicielles reportees sur la figure 1.4.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
0.2
0.4
0.6
0.8
1
1.2
1.4 Step Response
Time (sec)
A m p l i t u d e
Figure 1.4 – Reponse indicielle de l’asservissement F 1( p) en fonction de K
1.2.3 Comparaison
Comparer qualitativement la correction sur u1(t) et sur u2(t).
1.3 Etude d’une perturbation sur l’asservissement
On considere le dernier asservissement etudie de fonction de transfert F 1( p). L’effet de lavariation du signal u2(t) sur la temperature θ2(t) est interprete ici comme une perturbationsur l’asservissement ; on le note ω(t).
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 9/30
1.4. ANALYSE D’UNE CORRECTION INTEGRALE 9
1. Ecrire l’expression de la sortie Θ⋆2( p) en fonction de la consigne et de la perturbation ;
2. Quel serait, en regime permanent, l’effet d’une perturbation de type echelon d’am-plitude ω0 sur la sortie de l’asservissement 1.Donner les valeurs numeriques pour des corrections proportionnelles K = 1, 5 et 20
et pour une perturbation d’amplitude ω0 = 1oC .
1.4 Analyse d’une correction integrale
On pose :
G( p) = G1( p)G3( p) = Θ⋆
2( p)
U ⋆1 ( p) =
5, 56.10−6
p2 + 2, 5.10−3 p + 1, 39.10−6
On realise l’asservissement de temperature du procede comme indique sur le schema bloc
de la figure 1.5 avec une correction integrale pure : D( p) = K
′
p .
Figure 1.5 – Schema bloc de l’asservissement
1. Donner l’expression de la fonction de transfert T ( p) en boucle ouverte.
2. Donner l’expression de la fonction de transfert F ( p) en boucle fermee.
3. Calculer l’erreur de position de cet asservissement. Qu’apporte la caracteristiqueintegrale de la correction a l’asservissement ?
4. Calculer l’erreur de vitesse (de traınage) de l’asservissement. Conclure.
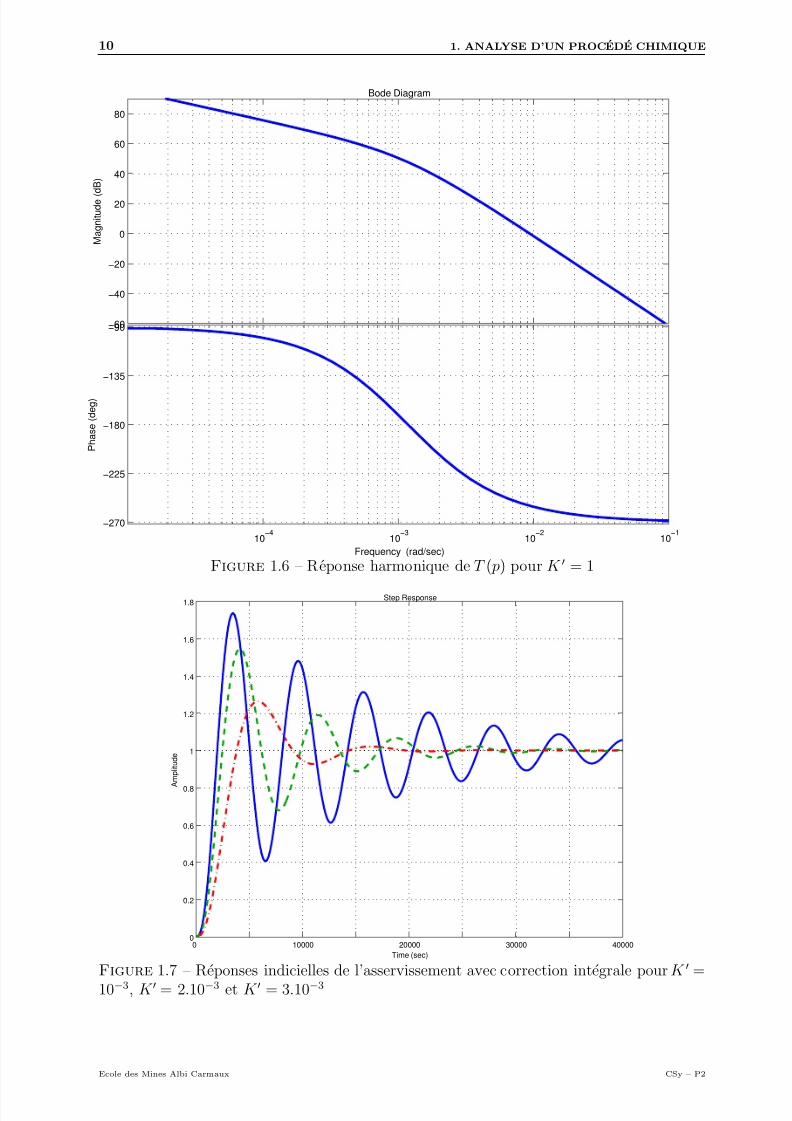
5. La reponse harmonique en boucle ouverte pour K ′ = 1 est donnee sur la figure 1.6.Donner la valeur des marges de stabilite.
6. L’asservissement est-il stable pour K ′ = 1 ? Justifier.
7. A l’aide du trace harmonique en boucle ouverte et en donnant la demarche, donnerla condition que doit remplir K ′ pour que l’asservissement soit stable.
8. Retrouver ce resultat en utilisant le critere de Routh.
9. Determiner la valeur de K ′ pour que l’asservissement ait une marge de phase de45o.
10. Commenter les resultats de la figure 1.7.
11. Montrer que ce type de correction permet de rejeter les perturbations de typeechelon. On se basera sur le travail fait a la question 1.3.
1. Le choix d’une telle perturbation etant ici l’effet d’une variation sur le signal u2(t) n’est certespas realiste mais permet d’apprehender la problematique de regulation c’est a dire du comportement del’asservissement face a une perturbation
CSy – P2 Ecole des Mines Albi Carmaux
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 10/30
10 1. ANALYSE D’UN PROCEDE CHIMIQUE
−60
−40
−20
0
20
40
60
80
M a g n i t u d e ( d B )
10−4
10−3
10−2
10−1
−270
−225
−180
−135
−90
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
Figure 1.6 – Reponse harmonique de T ( p) pour K ′ = 1
0 10000 20000 30000 400000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8 Step Response
Time (sec)
A
m p l i t u d e
Figure 1.7 – Reponses indicielles de l’asservissement avec correction integrale pour K ′ =10−3, K ′ = 2.10−3 et K ′ = 3.10−3
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 11/30
1.5. CORRECTION PROPORTIONNELLE-INTEGRALE (PI) 11
1.5 Correction Proportionnelle-Integrale (PI)
Pour que l’asservissement presente une erreur de position nulle et des caracteristiquesdynamiques (temps de montee, de reponse et premier depassement) acceptables – commepar exemple celles obtenues pour une correction proportionnelle K = 5 (paragraphe 1.2.2)
– nous proposons de faire la synthese du correcteur PI de fonction de transfert :
D( p) = K
T i p(1 + T i p)
avec K = 5 et T i = 2000. La reponse harmonique de la fonction K tG( p) est reportee surla figure1.8.
−60
−40
−20
0
20
40
M a g n i t u d e ( d B )
10−5
10−4
10−3
10−2
−180
−135
−90
−45
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
Figure 1.8 – Lieu de transfert de K tG( p)
1. A quoi correspond le lieu de transfert represente sur la figure 1.8 ?
2. Tracer le comportement asymptotique de D( p) sur le meme graphique ;
3. Deduire le lieu de transfert en boucle ouverte. Mesurer la marge de phase ;
4. La reponse indicielle de l’asservissement est reportee sur la figure 1.9. Commenterles performances dynamiques et en precision de cet asservissement. Comparer lecorrecteur proportionnel integral aux correcteurs etudies precedemment.
CSy – P2 Ecole des Mines Albi Carmaux

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 12/30
12 1. ANALYSE D’UN PROCEDE CHIMIQUE
0 1000 2000 3000 4000 5000 6000 7000 80000
0.2
0.4
0.6
0.8
1
Step Response
Time (seconds)
A m p l i t u d e
Figure 1.9 – Reponse indicielle de l’asservissement
1.6 Analyse et simulation a l’aide de MATLAB
On considere le procede linearise en considerant la correction sur la commande u1(t). Lafonction de transfert du procede a commander s’ecrit :
G( p) = G1( p)×G3( p) = K 1
(1 + τ 1 p) × K 3
(1 + τ 3 p)
avec K 1 = 4, τ 1 = 600s, K 3 = 1 et τ 3 = 1200s.Le capteur est assimilable a un gain K t = 0, 15V/oC.Trois correcteurs de fonctions de transfert D1( p), D2( p) et D3( p) vont etre etudies etcompares.[Entre crochets seront donnees les commandes MATLAB a utiliser – leur syntaxe peut etreobtenue grace a l’aide en ligne avec la commande help]
1.6.1 Correction Proportionnelle – D1( p) = K 1. Apres avoir proprement defini les differents parametres et les differentes fonctions de
transfert sous MATLAB, ecrire les fonctions de transfert T ( p) en boucle ouverte etF ( p) en boucle fermee [ feedback ] pour une correction proportionnelle de gain K = 5,K = 20 et K = 50.
2. Quelle est la fonction de transfert utilisee pour le critere des marges de stabilite ?Quel est l’objectif de ce critere ?Donner les marges de stabilite [margin ] pour les trois cas.Quelle conclusion peut-on tirer du resultat de marge de gain ?
3. Donner les poles [pole ] de la fonction de transfert en boucle fermee, le coefficientd’amortissement [damp] et tracer les reponses indicielles [step] de l’asservissementpour les 3 valeurs de K .
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 13/30
1.6. ANALYSE ET SIMULATION A L’AIDE DE MATLAB 13
4. Etablir le lien entre le premier depassement, le coefficient d’amortissement et lamarge de phase.
5. Demontrer que l’erreur de position est finie, qu’elle egale 11+KK 1K 3K t
θ0 et que savaleur correspond aux resultats obtenus sur les traces indiciels.
6. Demontrer que l’erreur de vitesse est infinie. En faire une illustration a l’aide deMATLAB.
1.6.2 Correction Integrale – D2( p) = K ′
p
1. Pour K ′ = 1, ecrire la nouvelle fonction de transfert T ( p) en boucle ouverte.
2. Tracer l’evolution des poles de la fonction de transfert en boucle fermee [rlocus ] enfonction de K ′.Discuter de la stabilite de l’asservissement en fonction de K ′.
3. Refaire la demarche de l’analyse de la stabilite de l’asservissement a partir de lamesure des marges de stabilite.
4. Pour deux ou trois valeurs de K ′ representatives, tracer la reponse indicielle del’asservissement. Commenter les resultats obtenus en terme de caracteristiques dy-namiques et de performances en precision de l’asservissement.
5. Demontrer que l’erreur de vitesse est finie. En faire une illustration a l’aide deMATLAB.
1.6.3 Correction Proportionnelle Integrale – D3( p) = K ′′T i p
(1 + T i p)
On pose K ′′ = 20 et on considere trois valeurs de T i : T i = 1000s, 2600s et 7000s.
1. Faire l’analyse du correcteur seul dans le plan de Bode (savoir positionner la pulsa-tion 1
T i).
Quel est l’interet de ce correcteur ? Qu’apporte-t-il aux basses frequences ? Auxhautes frequences ?Ce type de correcteur peut-il ameliorer le degre de stabilite de l’asservissement ?
2. Comparer les marges de phase obtenues avec le correcteur D3( p) pour les differentesvaleurs de T i a celle obtenue pour une correction proportionnelle D1( p) = K de gainK = 20.
3. Tracer les reponses indicielles de l’asservissement pour les correcteurs D3( p) ainsi quepour la correction proportionnelle K = 20 ; faire le lien avec la question precedente.
4. Discuter du compromis temps de reponse/degre de stabilite sur le choix de T i. Endeduire une methode de placement de P.I.
1.6.4 Placement d’un P.I.D. par synthese dans le plan de BodeOn souhaite placer un correcteur qui satisfasse le cahier des charges :
CSy – P2 Ecole des Mines Albi Carmaux

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 14/30
14 1. ANALYSE D’UN PROCEDE CHIMIQUE
— le temps de montee (raideur) de l’asservissement doit correspondre a celui mesureepour un gain proportionnel de valeur 20 ;
— l’erreur de position de l’asservissement doit etre nulle ;
— la marge de phase doit etre de 70o.
Pour repondre a ce cahier des charges, on propose de calculer le correcteur :
D4( p) = 20 × K
T i p(1 + T i p)(1 + T d p)
que l’on comparera a la correction proportionnelle de gain 20.
1. Pour quelle raison le correcteur D4( p) peut-il satisfaire le cahier des charges ?
2. En utilisant l’algorithme de reglage vu en cours, calculer le bon parametre T d ;
3. Deduire la valeur d’ajustement K ;
4. Quel choix est-il judicieux de faire pour T i ;
5. Definir, sous Matlab, le correcteur D4( p) ;
6. Comparer, dans le plan de Bode, la marge de phase dans le cas de la correctionproportionnelle et dans celui du correcteur D4( p) ;
7. Illustrer l’effet du correcteur dans le plan de nyquist comparativement a la correctionproportionnelle ;
8. Comparer les reponses indicielles des deux asservissements consideres.Commenter.
1.6.5 Placement d’un P.I.D. par la methode du modele
On souhaite placer un correcteur qui satisfasse le cahier des charges :
— l’erreur de position de l’asservissement doit etre nulle ;
— le premier depassement doit etre de l’ordre de 5% ;
— le temps de reponse de l’asservissement ne doit pas exceder 1/4 d’heure (900s).
Pour repondre a ce cahier des charges, on propose de calculer le correcteur :
D5( p) = K
T i p(1 + T i p)(1 + T d p)
1. On choisit de compenser le pole rapide du systeme pour obtenir une fonction detransfert en boucle fermee d’ordre 2.Quelle valeur doit prendre T i ? Justifier ;
2. Pour quelle raison le correcteur D5( p) peut-il satisfaire le cahier des charges ?
3. Traduire les specifications desirees en terme de ζ et de ωn (tels que definis dans lecours) ;
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 15/30
1.6. ANALYSE ET SIMULATION A L’AIDE DE MATLAB 15
4. Deduire les parametres K et T d ;
5. Definir, sous Matlab, le correcteur D5( p) ;
6. Comparer les reponses indicielles des deux asservissements consideres.Commenter.
CSy – P2 Ecole des Mines Albi Carmaux

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 16/30
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 17/30

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 18/30
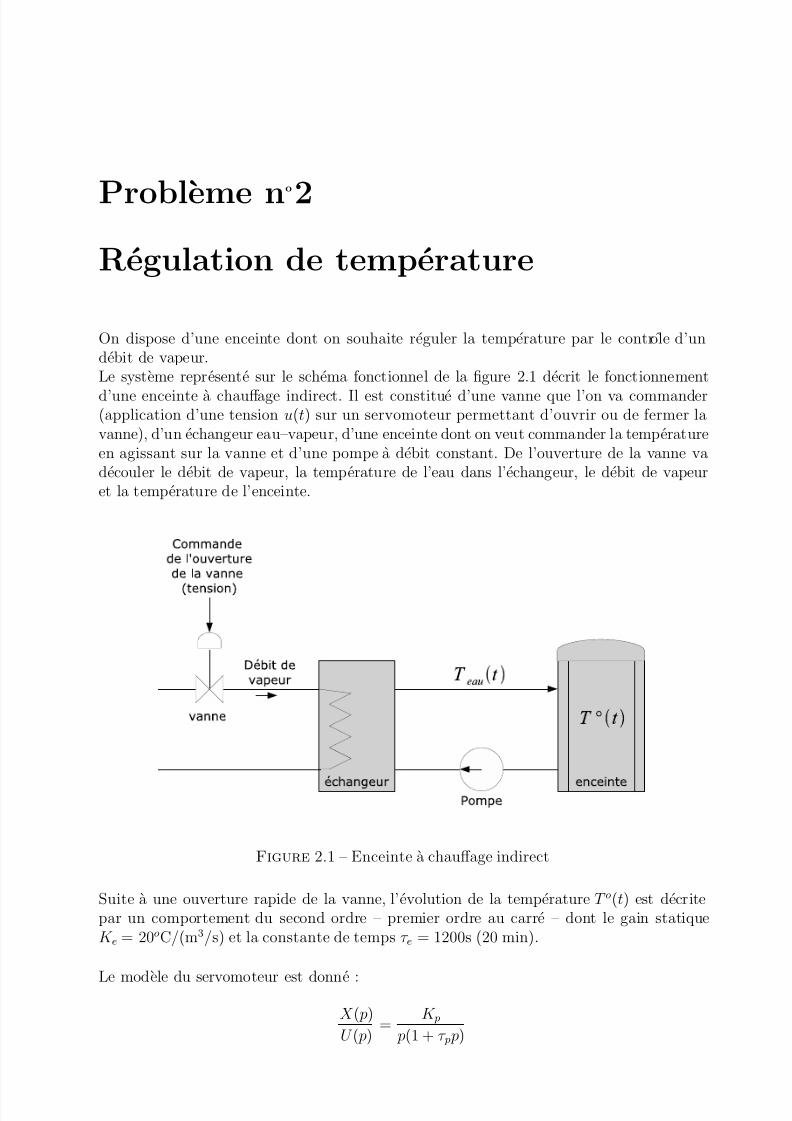
18 2. REGULATION DE TEMPERATURE
pour lequel x(t) est la position lineaire de la soupape montee sur l’arbre du moteur. Ondonne K p = 2.10−4m/V et τ p = 0.5s.
La fonction de transfert de la vanne est assimilable a un gain de valeur K v = 100(m3/s)/m.
L’organe de mesure de la temperature est un capteur de gain K c = 5.10
−2V/0C.
1. Representer le schema blocs de la chaıne directe du procede ;
2. Un regulateur proportionnel K est implante pour commander la temperature del’enceinte par action sur la tension u(t). Representer le schema bloc de l’asservisse-ment;
3. Ecrire les fonctions de transfert en boucle ouverte et en boucle fermee ;
4. Faire une analyse de la stabilite de l’asservissement par le critere algebrique deRouth et le critere geometrique du revers ;
5. Le lieu de transfert de la boucle ouverte pour K = 1 represente dans le plan deBode est donne figure 2.2. Retrouver le resultat de la question precedente dans ceplan.
−80
−60
−40
−20
0
20
40
M a g n i t u d e ( d B )
10−4
10−3
10−2
−270
−225
−180
−135
−90
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
Figure 2.2 – Boucle ouverte pour K = 1
6. Pour quelle(s) raison(s), dans le cas d’une correction proportionnelle, l’erreur deposition de l’asservissement est-elle nulle ?
Ecole des Mines Albi Carmaux CSy – P2
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 19/30
19
7. Dessiner le comportement indiciel de l’asservissement pour K = 0.08.
On propose de remplacer le correcteur proportionnel par une correction proportion-nelle derivee (PD) de fonction de transfert :
D( p) = K (1 + T d p)
avec K = 0.08 et T d = 2539.
8. Quelle est l’influence de ce correcteur sur la precision de l’asservissement ?
9. Faire le trace de la reponse harmonique de D( p) sur le graphique 2.2. Deduire celuide la nouvelle fonction de transfert en boucle ouverte ;
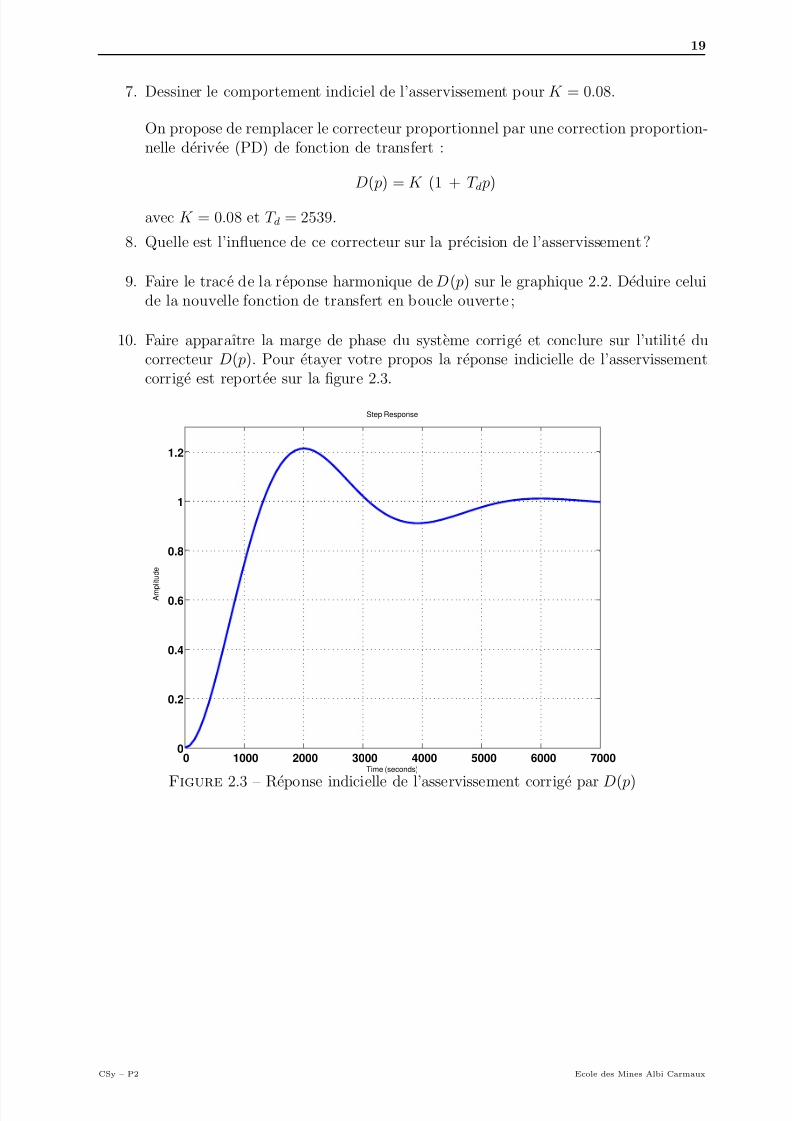
10. Faire apparaıtre la marge de phase du systeme corrige et conclure sur l’utilite ducorrecteur D( p). Pour etayer votre propos la reponse indicielle de l’asservissementcorrige est reportee sur la figure 2.3.
0 1000 2000 3000 4000 5000 6000 70000
0.2
0.4
0.6
0.8
1
1.2
Step Response
Time (seconds)
A m p l i t u d e
Figure 2.3 – Reponse indicielle de l’asservissement corrige par D( p)
CSy – P2 Ecole des Mines Albi Carmaux

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 20/30
20 2. REGULATION DE TEMPERATURE
Ecole des Mines Albi Carmaux CSy – P2
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 21/30
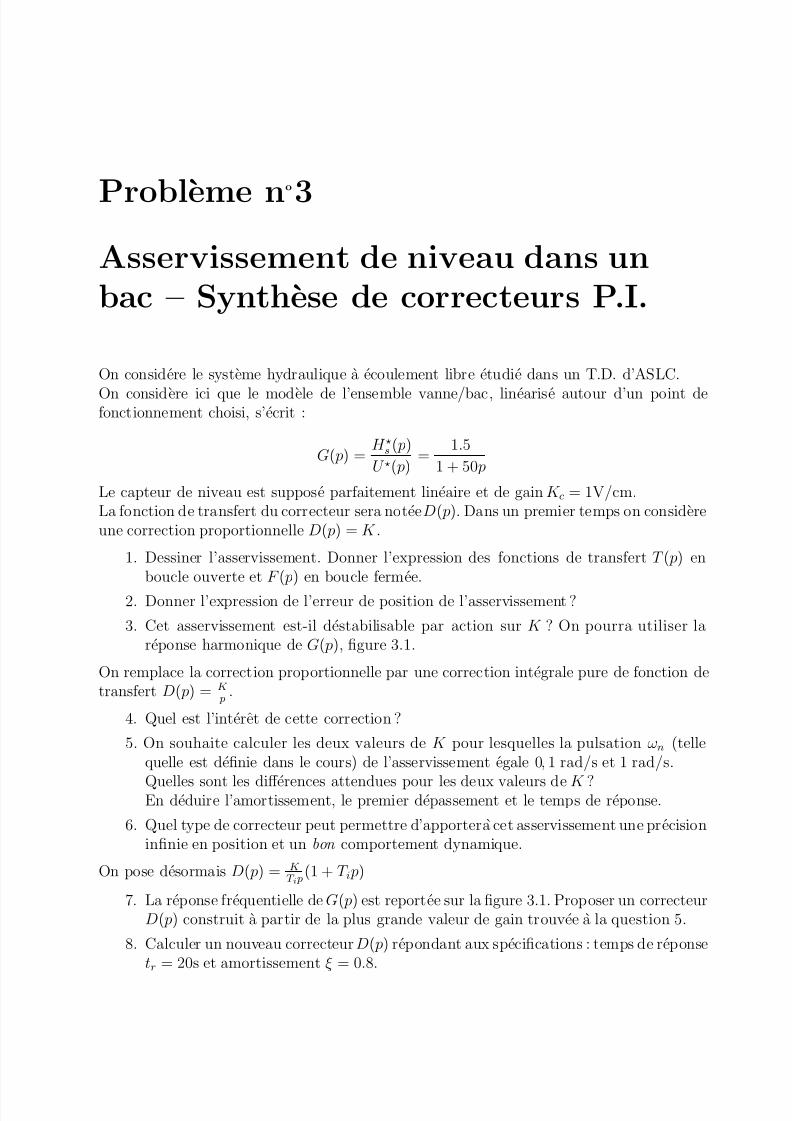
Probleme no
3
Asservissement de niveau dans unbac – Synthese de correcteurs P.I.
On considere le systeme hydraulique a ecoulement libre etudie dans un T.D. d’ASLC.
On considere ici que le modele de l’ensemble vanne/bac, linearise autour d’un point defonctionnement choisi, s’ecrit :
G( p) = H ⋆s ( p)
U ⋆( p) =
1.5
1 + 50 p
Le capteur de niveau est suppose parfaitement lineaire et de gain K c = 1V/cm.La fonction de transfert du correcteur sera notee D( p). Dans un premier temps on considereune correction proportionnelle D( p) = K .
1. Dessiner l’asservissement. Donner l’expression des fonctions de transfert T ( p) enboucle ouverte et F ( p) en boucle fermee.
2. Donner l’expression de l’erreur de position de l’asservissement ?
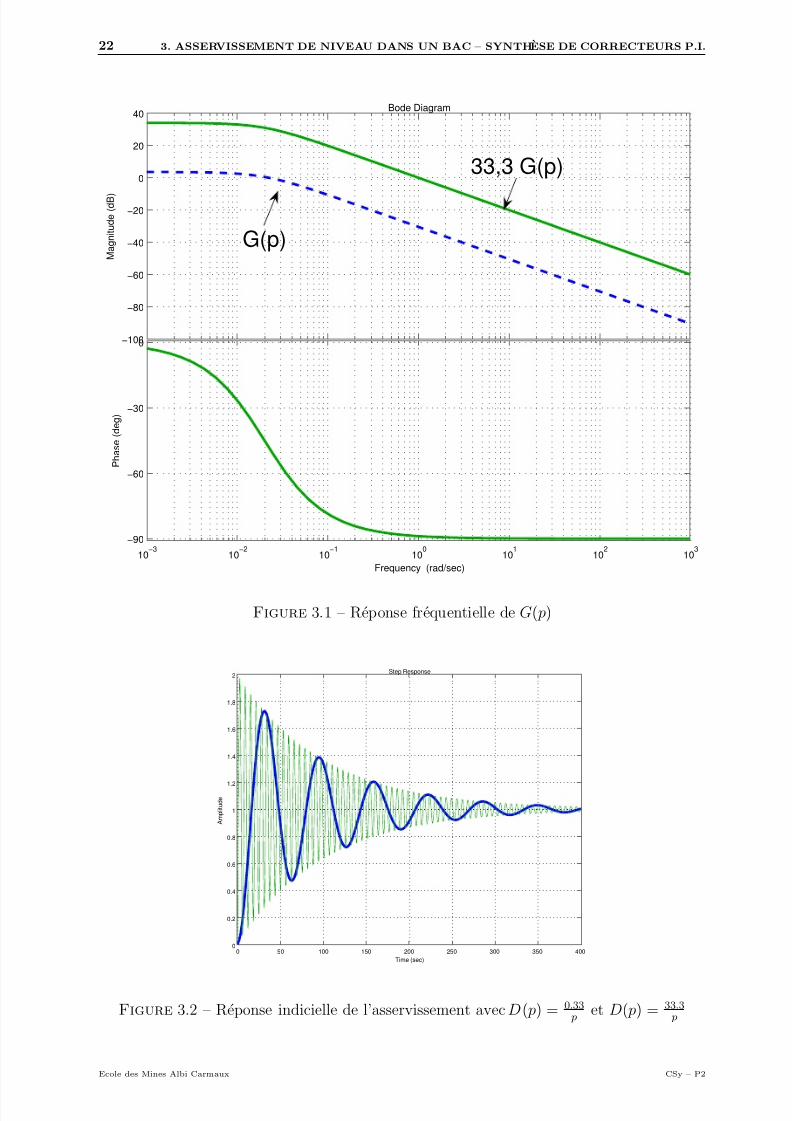
3. Cet asservissement est-il destabilisable par action sur K ? On pourra utiliser lareponse harmonique de G( p), figure 3.1.
On remplace la correction proportionnelle par une correction integrale pure de fonction detransfert D( p) = K
p .
4. Quel est l’interet de cette correction ?
5. On souhaite calculer les deux valeurs de K pour lesquelles la pulsation ωn (tellequelle est definie dans le cours) de l’asservissement egale 0, 1 rad/s et 1 rad/s.
Quelles sont les differences attendues pour les deux valeurs de K ?En deduire l’amortissement, le premier depassement et le temps de reponse.
6. Quel type de correcteur peut permettre d’apporter a cet asservissement une precisioninfinie en position et un bon comportement dynamique.
On pose desormais D( p) = K T i p
(1 + T i p)
7. La reponse frequentielle de G( p) est reportee sur la figure 3.1. Proposer un correcteurD( p) construit a partir de la plus grande valeur de gain trouvee a la question 5.
8. Calculer un nouveau correcteur D( p) repondant aux specifications : temps de reponsetr = 20s et amortissement ξ = 0.8.
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 22/30
22 3. ASSERVISSEMENT DE NIVEAU DANS UN BAC – SYNTHESE DE CORRECTEURS P.I.
−100
−80
−60
−40
−20
0
20
40
M a g n i t u d e ( d B )
10−3
10−2
10−1
100
101
102
103
−90
−60
−30
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
G(p)
33,3 G(p)
Figure 3.1 – Reponse frequentielle de G( p)
0 50 100 150 200 250 300 350 4000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2 Step Response
Time (sec)
A m p l i t u d e
Figure 3.2 – Reponse indicielle de l’asservissement avec D( p) = 0.33 p
et D( p) = 33.3 p
Ecole des Mines Albi Carmaux CSy – P2
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 23/30
23
0 5 10 15 20 25 30 35 40 450
0.2
0.4
0.6
0.8
1
1.2
1.4 Step Response
Time (sec)
A m p l i t u d e
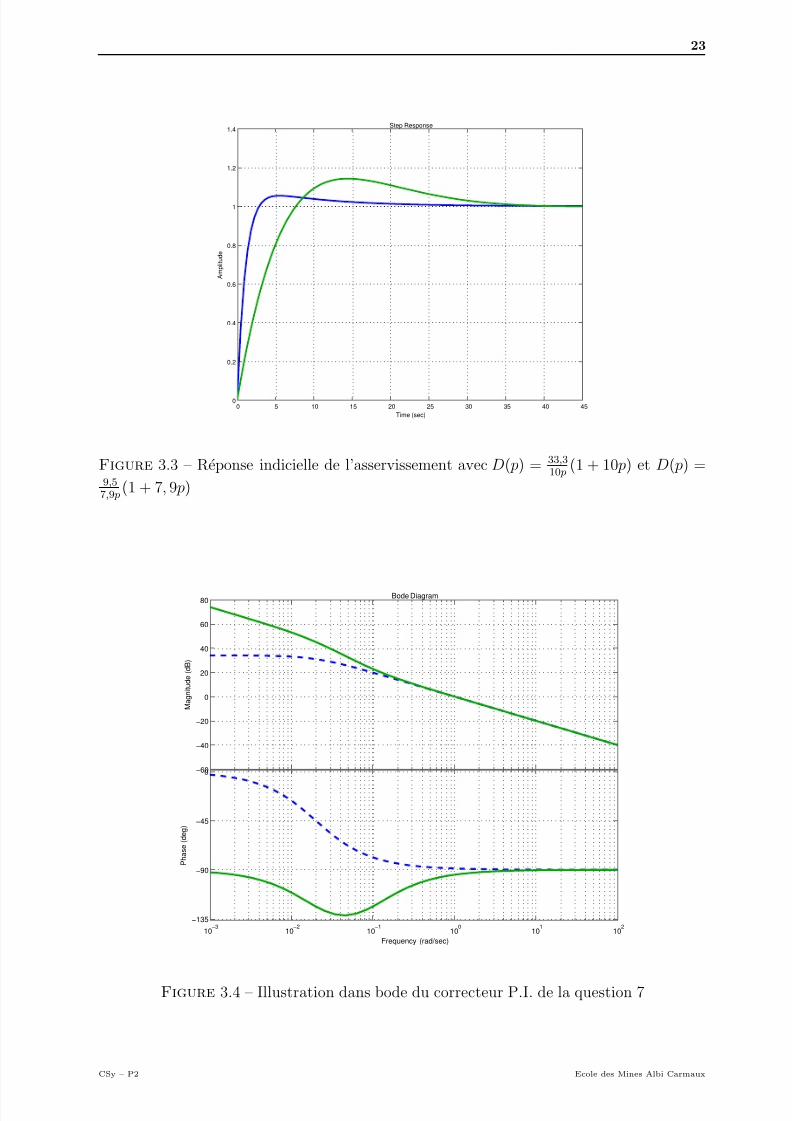
Figure 3.3 – Reponse indicielle de l’asservissement avec D( p) = 33,310 p
(1 + 10 p) et D( p) =9,57,9 p
(1 + 7, 9 p)
−60
−40
−20
0
20
40
60
80
M a g n i t u d e ( d B )
10−3
10−2
10−1
100
101
102
−135
−90
−45
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
Figure 3.4 – Illustration dans bode du correcteur P.I. de la question 7
CSy – P2 Ecole des Mines Albi Carmaux

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 24/30
24 3. ASSERVISSEMENT DE NIVEAU DANS UN BAC – SYNTHESE DE CORRECTEURS P.I.
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 25/30
Probleme no
4
Asservissement de position angulaire– Synthese d’un correcteur Avancede Phase
Nous considerons un asservissement de position angulaire. La fonction de transfert dusysteme a commander (modele du moteur a courant continu dont on neglige la constantede temps electrique) est :
G( p) = K
p(1 + T m p) =
1.69
p(1 + 0.16 p)
Le schema bloc de l’asservissement est represente sur la figure 4.1.
Figure 4.1 – Asservissement de position angulaire du moteur
On rappelle que le capteur de position angulaire est lineaire et de gain K s = 10 V/tr etque l’on pose K e = K s.
D( p) est la fonction de transfert d’un correcteur que nous allons synthetiser ; on proposede faire l’etude du correcteur :
D( p) = 1 + τ 1 p1 + τ p
Ce correcteur est de type avance de phase lorsque τ 1 > τ .

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 26/30
26
4. ASSERVISSEMENT DE POSITION ANGULAIRE – SYNTHESE D’UN CORRECTEUR AVANCE DEPHASE
Synthese du correcteur D( p) par la methode du modele
On appelle methode du modele la methode qui permet d’obtenir, par identification, lesparametres d’un correcteur afin d’obtenir un modele desire en boucle fermee.
Nous proposons de calculer les parametres τ 1 et τ du correcteur D( p) afin que le systemeasservi se comporte comme un systeme du second ordre avec un amortissement ξ = 0.7.
1. Quel effet peut avoir le correcteur D( p) sur la precision de l’asservissement ? Argu-menter.
2. Nous avons deux parametres a regler pour repondre a une specification (amortisse-ment) ; le degre de liberte va etre utilise en faisant une compensation du pole liea la constante de temps mecanique : on pose τ 1 = T m.Montrer que le modele fonction de transfert du systeme asservi est, dans ce cas, unmodele du second ordre.
3. Calculer le parametre τ qui permet d’avoir un facteur d’amortissement ξ = 0.7.
4. Esquisser l’allure de la reponse indicielle de l’asservissement 1 et la comparer quali-tativement a celle obtenue pour D( p) = 1.
Synthese d’un correcteur avance de phase
On pose τ 1 = aτ avec a > 1. Le correcteur avance de phase s’ecrit alors :
D( p) = 1 + aτ p
1 + τ p
, a > 1
Caracteristiques harmoniques de l’avance de phase
1. Tracer le comportement frequentiel asymptotique de D( p) dans le plan de Bode.
2. Ecrire le module et l’argument de D( jω).
3. Montrer que l’argument est maximal 2 pour la pulsation ωmax = 1√ a τ
. Placer cettepulsation sur le trace asymptotique.
4. On note Φmax, l’argument maximal. Montrer que :
Φmax = arctan√
a − arctan 1√ a
En utilisant les egalites trigonometriques adequates 3, montrer que l’on a la relation :
sinΦmax = a− 1
a + 1
1. On rappelle que pour un modele du second ordre, les caracteristiques dynamiques sont : tr ≃ 3
σ (−σ
partie reelle du pole dominant) ; tm ≃ 1.8
ωn; D1 = e
−πξ√ 1−ξ2 .
2. On rappelle que d arctanu
dω = 1
1+u2du
dω
3. On s’en sort rapidement en utilisant les egalites pratiques cos(arctanx) = 1√ 1+x2
, sin(arctanx) =x√ 1+x2
et sin(a− b) = sin(a)cos(b)− sin(b)cos(a)
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 27/30
27
5. Montrer que pour la pulsation ωmax, le module en decibels egale 10 log a.
6. Deduire des calculs precedents le trace reel de la reponse harmonique de D( p).
7. De maniere generale, quel est l’apport de ce correcteur sur le lieu de transfert de laboucle ouverte.
Application a l’asservissement de position
Soient T 1( p) la fonction de transfert en boucle ouverte pour D( p) = 1 et T Avφ( p) la fonctionde transfert en boucle ouverte pour D( p) = 1+ aτp
1+ τp .
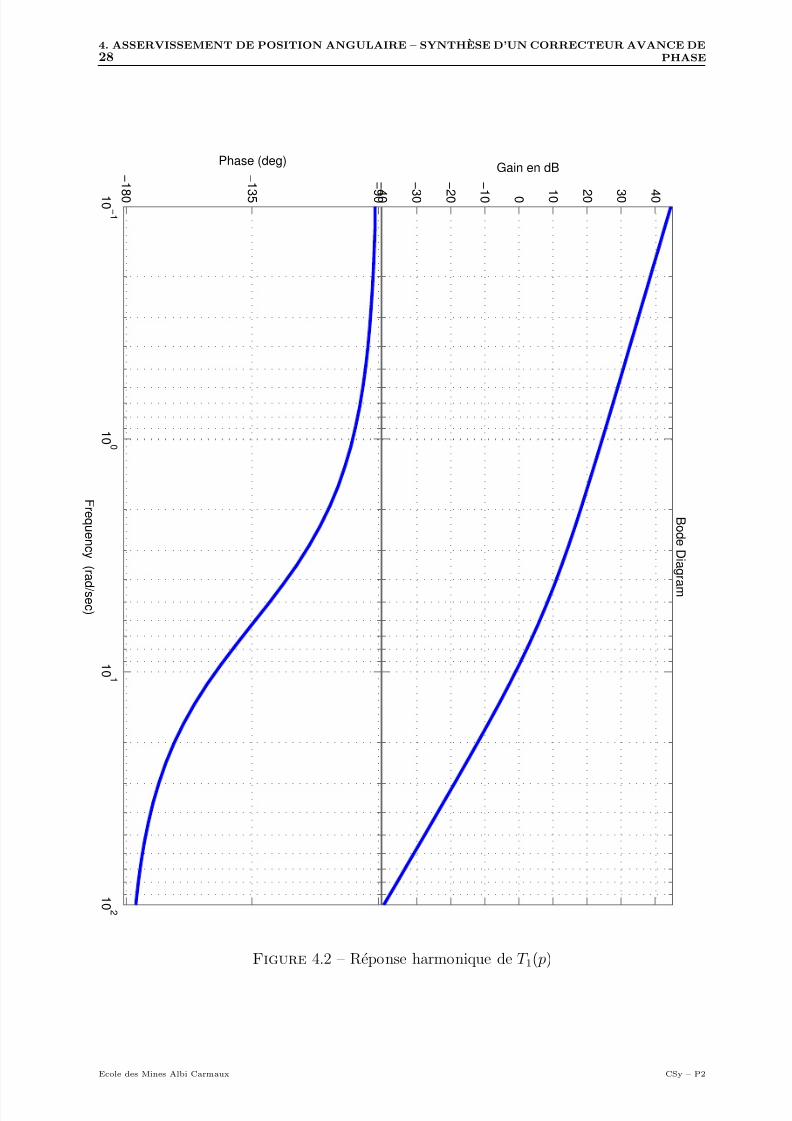
La reponse harmonique de T 1( p) est representee sur la figure 4.2, reponse a partir de laquellenous avions mesure une marge de phase de 35o a la pulsation ω0dB = 9.5rad/s.
L’obejctif de l’exercice est de placer l’avance de phase D( p) pour ameliorer le degre de
stabilite de l’asservissement et obtenir une marge de phase de 65o. Le correcteur D( p) doitdonc etre calcule pour apporter :
Marge de phase a apporter = Marge de phase desiree − Marge de phase avant correction
soit :Φmax = 65o − 35o = 30o
1. Calculer le parametre a qui garantisse Φmax = 30o.
2. Sur la boucle ouverte apres correction notee T Avφ( p), on souhaite que la pulsation demesure de la nouvelle marge de phase corresponde a celle que nous avons note ωmax,c’est a dire a la pulsation ou le correcteur apporte le maximum Φmax de phase.Determiner graphiquement la valeur de ωmax.
3. Deduire des resultats precedents la valeur de τ .
4. Esquisser la reponse harmonique de ce correcteur considere seul en notant les valeursremarquables.
5. A partir de cette esquisse, tracer, sur la figure 4.2, la reponse harmonique de lafonction de transfert T Avφ( p), boucle ouverte apres correction.
6. Mesurer la nouvelle marge. Pourquoi ce resultat est-il un peu inferieur a la margeescomptee ?
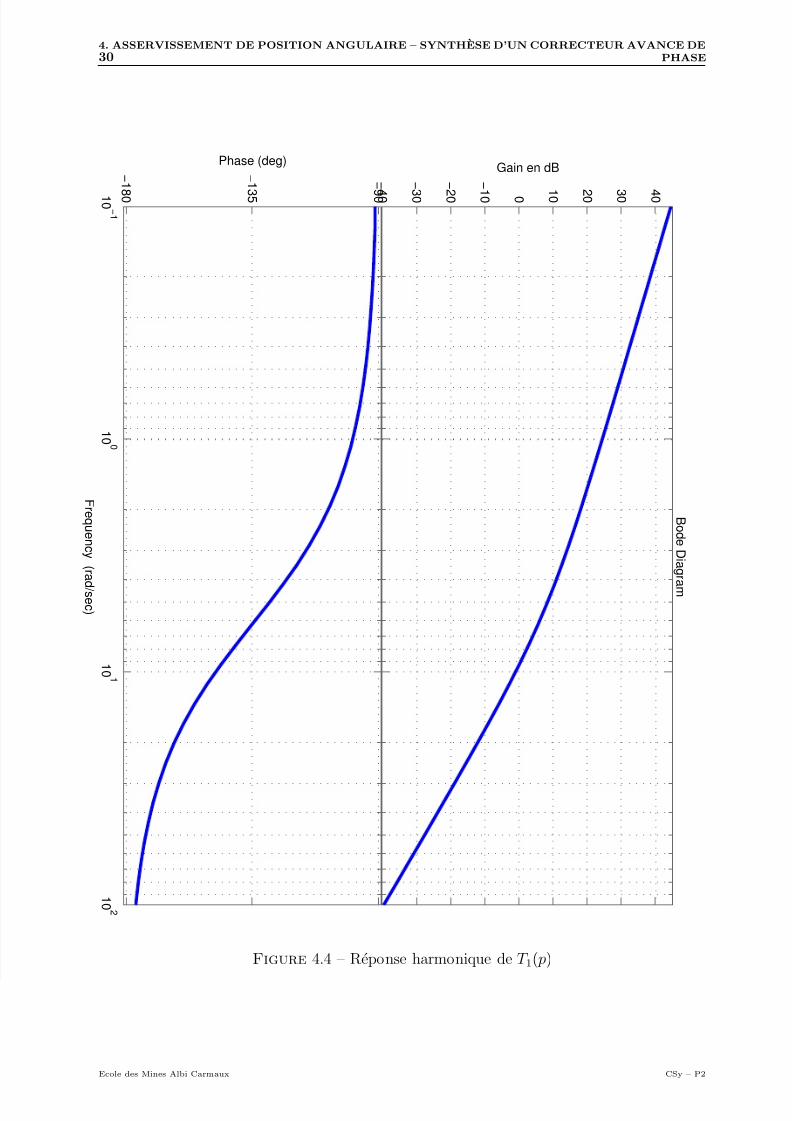
7. Afin de mettre en œuvre la demarche de placement d’un correcteur avance de phasedans son integralite, calculer un nouveau correcteur avance de phase tel que lamarge de phase egale 70o (travailler sur la figure 4.4. On majorera la quantite Φmax
de depart de 20%).
La figure 4.3 illustre les reponses indicielles de l’asservissement pour le correcteur D( p) = 1,l’avance de phase no1 de fonction de transfert D( p) = 1+0.133 p
1+0.044 p et l’avance de phase no2 de
fonction de transfert D( p) = 1+0.15 p1+0.03 p
.
CSy – P2 Ecole des Mines Albi Carmaux
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 28/30
28
4. ASSERVISSEMENT DE POSITION ANGULAIRE – SYNTHESE D’UN CORRECTEUR AVANCE DEPHASE
−
4 0
−
3 0
−
2 0
−
1 0 0 1 0 2 0 3 0 4 0
Gain en dB
B o d eD i a gr am
F r e q u en c y
( r a
d / s e c )
1 0 −1
1 0 0
1 0 1
1 0 2
−1
8 0
−1
3 5
−
9 0
Phase (deg)
Figure 4.2 – Reponse harmonique de T 1( p)
Ecole des Mines Albi Carmaux CSy – P2

8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 29/30
29
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4 Step Response
Time (sec)
A m p l i t u d e
D(p)=1
avance de phase n°1
avance de phase n°2
Figure 4.3 – Reponses indicielles de l’asservissement corrige par avance de phase
CSy – P2 Ecole des Mines Albi Carmaux
8/18/2019 P2 Calmettes TDs
http://slidepdf.com/reader/full/p2-calmettes-tds 30/30
30
4. ASSERVISSEMENT DE POSITION ANGULAIRE – SYNTHESE D’UN CORRECTEUR AVANCE DEPHASE
−
4 0
−
3 0
−
2 0
−
1 0 0 1 0 2 0 3 0 4 0
Gain en dB
B o d eD i a gr am
F r e q u en c y
( r a
d / s e c )
1 0 −1
1 0 0
1 0 1
1 0 2
−1
8 0
−1
3 5
−
9 0
Phase (deg)
Figure 4.4 – Reponse harmonique de T 1( p)