fizicadigilib.utcb.ro/repository/ccn/pdf/giurgiufizica.pdfa predominat mecanica, în secolul 19 -...
TRANSCRIPT
MIRCEA GIURGIU
FIZICANOTE DE CURS
UNIVERSITATEA TEHNICĂ DE CONSTRUCŢII BUCUREŞTI
- 2010 -

Prefaţă
Prezenta lucrare se adresează mai ales studenţilor de la Facultatea de
Geodezie a Universităţii Tehnice de Construcţii Bucureşti şi acoperă o parte
semnificativă din actualul plan de învăţământ al disciplinei Fizică. Însă,
lucrarea poate fi folosită şi de către studenţii celorlalte facultăţi ale
universităţii, deoarece ea cuprinde cea mai mare parte a capitolelor studiate de
aceştia la cursurile de fizică. De asemenea, lucrarea se adresează tuturor celor
interesaţi sa aprofundeze domeniul atât de complex şi de vast al fizicii.
Tratarea materialului de faţă s-a făcut corespunzător nivelului actual al
cursurilor de “Fizică generală”, punându-se accent pe evidenţierea principiilor
generale ale fizicii şi mai puţin asupra procedeelor specifice fiecărui domeniu.
Înţelegerea acestor cursuri presupune cunoştinţe matematice din
domeniul ecuaţiilor diferenţiale, calculului integral, algebrei şi analizei
vectoriale, etc.
Însuşirea fizicii este o premisă obligatorie pentru abordarea cu succes a
disciplinelor tehnice generale şi de specialitate necesare profesiei de inginer.
Autorul
1
CUPRINS
I INTRODUCERE 7
1.1. Unităţi de măsură. Mărimi fizice fundamentale 10
1.2. Formule dimensionale 12
1.3. Analiză dimensională 13
II ELEMENTE DE MECANICĂ CLASICĂ 16
2.1. Conceptele fundamentale ale mecanicii clasice 16
2.1.1. Elementele mişcării: traiectoria, viteza, acceleraţia 18
2.2. Principiile mecanicii clasice 21
2.3 Lucrul mecanic. Puterea 26
2.4. Energia cinetică 28
2.5. Energia potenţială 31
2.6. Teoremele generale ale mecanicii 35
2.6.1. Teorema impulsului 37
2.6.2. Teorema momentului cinetic 38
2.6.3 Teorema energiei 40
2.7. Oscilaţii şi unde elastice 44
2.7.1. Oscilaţii armonice 45
2.7.2. Compunerea oscilaţiilor armonice 47
2.7.3. Oscilaţii amortizate 51
2.7.4. Oscilaţii forţate şi rezonanţa 53
2.7.5. Unde elastice. Ecuaţia undei plane 56
2.7.6. Viteza de propagare a undelor. Dispersia undelor 59
2.7.7. Unde sferice 61
2.7.8. Energia undei. Intensitatea undei. Atenuarea undelor 62
2.7.9. Elemente de acustică 65
2.7.10. Ultrasunetele şi aplicaţiile lor 68

2
III TEORIA RELATIVITĂŢII 70
3.1. Relativitatea clasică 70
3.2. Teoria relativităţii restrânse (speciale) 73
3.2.1. Principiile relativităţii restrânse 74
3.2.2. Grupul de transformări Lorentz 75
3.2.3. Consecinţe cinematice ale grupului de transformări
Lorentz 77
3.2.3.1. Contracţia lungimilor 78
3.2.3.2. Dilatarea duratelor 79
3.2.3.3. Compunerea relativistă a vitezelor 80
3.2.3.4. Universul cvadridimensional 82
3.2.4. Elemente de dinamică relativistă 84
3.2.4.1. Dependenţa masei de viteză 84
3.2.4.2. Relaţia dintre masă şi energie 87
3.2.4.3. Relaţia dintre energie şi impuls 89
IV TERMODINAMICA 92
4.1. Noţiuni termodinamice de bază 92
4.2. Sisteme termodinamice 94
4.2.1. Gazul ideal 94
4.2.2. Teoria cinetico - moleculară a gazului ideal 96
4.2.2.1. Calculul cinetic al presiunii unui gaz ideal 96
4.2.2.2. Interpretarea cinetico - moleculară a temperaturii 99
4.2.2.3. Viteza termică a moleculelor 100
4.2.3. Gazul real 101
4.3. Legea barometrică şi distribuţia moleculelor din
atmosferă după altitudine 105
4.4. Distribuţia moleculelor unui gaz după modulul
vitezei – funcţia de distribuţie Maxwell 107

3
4.5. Principiile termodinamici 108
4.5.1. Energie internă, lucrul mecanic, căldura 108
4.5.2 Principiul întâi al termodinamicii 111
4.5.2.1. Coeficienţi calorici 112
4.5.2.2 Relaţia Robert Mayer pentru gazul ideal 112
4.5.2.3. Transformări politropice ale gazului ideal 113
4.5.3. Principiul al doilea al termodinamicii 117
4.5.3.1. Maşini termice. Ciclul Carnot 117
4.5.3.2. Entropia 119
4.5.4. Principiul al treilea al termodinamicii 123
V ELECTRICITATE ŞI MAGNETISM 126
5.1. Electrostatica 126
5.1.1. Saricina electrică. Legea Coulomb 126
5.1.2. Câmpul electric 129
5.1.2.1. Intensitatea câmpului electrostatic 129
5.1.2.2. Potenţialul electric . Relaţia dintre intensitatea
câmpului electric şi potenţialul electric 131
5.1.2.3. Fluxul câmpului electric. Teorema Gauss pentru medii
omogene. Ecuaţia Poisson 134
5.1.3. Capacitatea electrică a corpurilor conductoare.
Condensatoare 136
5.1.4. Medii dielectrice 140
5.1.5. Energia câmpului electrostatic 144
5.2. Mărimi si legi de bază în electrocinetică 146
5.2.1. Noţiuni introductive 146
5.2.2. Ecuaţia de continuitate 147
5.2.3. Curentul continuu în conductori metalici. Expresiile
locale ale legii Ohm şi legii Joule 148

4
5.2.4. Tensiunea electromotoare 151
5.3. Electromagnetism 153
5.3.1. Câmpul magnetic. Inducţia câmpului magnetic 153
5.3.2. Legea Biot-Savart-Laplace 155
5.3.3. Fluxul inducţiei câmpului magnetic 156
5.3.4. Legea circuitului magnetic (legea circuitală Ampère) 157
5.3.5. Inducţia electromagnetică 158
5.3.6. Autoinducţia. Energia câmpului magnetic 162
5.3.7. Curentul de deplasare. Inducţia magnetoelectrică 164
5.3.8. Câmpul electromagnetic. Ecuaţiile Maxwell 166
5.4. Unde electromagnetice 169
5.4.1. Ecuaţia undelor electromagnetice 169
5.4.2. Proprietăţile undelor electromagnetice 171
5.4.3. Energia transportată de undele electromagnetice 173
5.4.4. Spectrul undelor electromagnetice 176
VI OPTICA 178
6.1. Elemente de fotometrie 178
6.1.1. Mărimi şi unităţi fotometrice 180
6.2. Optica geometrică 183
6.2.1. Legile fundamentale ale opticii geometrice 183
6.2.2. Reflexia totală a luminii. Fibre optice 185
6.2.3. Aproximaţia gaussiană 186
6.2.4. Dioptrul sferic. Dioptrul plan 187
6.2.5. Oglinda sferică. Oglinda plană 191
6.2.6. Lentila subţire 193
6.2.7. Prisma optică 197
6.2.8. Aberaţiile sistemelor optice 202
6.2.9. Aparate optice 205

5
6.2.9.1. Caracteristicile aparatelor optice 205
6.2.9.2. Aparate optice cu imagini reale 207
6.2.9.3. Aparate optice cu imagini virtuale 211
6.3. Optica ondulatorie 214
6.3.1. Interferenţa luminii 214
6.3.1.1. Noţiuni despre condiţia de coerenţă 217
6.3.1.2. Dispozitive de interferenţă 220
6.3.2. Difracţia luminii 227
6.3.2.1. Difracţia Fraunhofer pe o fantă dreptunghiulară 228
6.3.2.2. Difracţia Fraunhofer pe o reţea de difracţie plană 232
6.3.3. Polarizarea luminii 237
6.3.3.1. Polarizarea luminii prin reflexie 238
6.3.3.2. Polarizarea luminii prin dublă refracţie 240
6.3.3.3. Dispozitive pentru obţinerea luminii liniar polarizae 242
6.3.3.4. Birefingenţă artificială 244
6.3.3.5. Polarizaţia rotatorie 247
6.4. Optica fotonică 249
6.4.1. Efectul fotoelectric 250
6.4.2. Teoria fotonică a luminii 253
6.4.3. Explicarea legilor efectului fotoelectric 255
6.4.4. Efectul Compton 256
6.5. Absorbţia şi dispersia luminii 260
6.5.1. Absorbţia luminii 260
6.5.2. Dispersia luminii 262
VII LASERI 265
7.1. Absorbţia, emisia spontană şi emisia stimulată 265
7.2. Amplificarea radiaţiei 269
7.3. Inversia de populaţie 270

6
7.4. Proprietăţile radiaţiei laser 272
7.5. Tipuri de laseri 274
VIII RADIAŢIA TERMICĂ 277
8.1. Legile experimentale ale radiaţiei termice a corpului negru 279
IX RADIAŢIA X 284
X HOLOGRAFIA 288
Bibliografie 293

Capitolul 1: Introducere
Fizica studiază cele mai generale forme de mişcare ale materiei (mecanice, termice,
electromagnetice, etc). Prin materie se înţelege realitatea obiectivă care există în mod
independent de conştiinţa umană şi este reflectată adecvat de aceasta. Atributul fundamental
al materiei, modul său de existenţă, este mişcarea. Prin mişcare se înţelege orice schimbare
sau proces: deplasare mecanică în spaţiu, reacţie chimică, radiaţie electromagnetică, proces
biologic, gândire. Formele fizice de mişcare ale materiei participă întotdeauna şi la formele
mai complexe (biologice, sociale), fără a epuiza însă esenţa lor calitativă. Astfel, legea
conservării energiei se aplică tuturor proceselor: chimice, biologice, etc; legea atracţiei
universale se aplică tuturor corpurilor: simple sau complexe, vii sau neînsufleţite, etc.
Scopul fizicii este descrierea, explicarea şi prevederea fenomenelor naturii, pentru a
le putea folosi şi stăpâni. Dezvoltarea fizicii a fost stimulată de necesităţile practice ale
oamenilor. La rândul lor descoperirile şi realizările fizicii stau la baza dezvoltării tehnicii;
modelele de cercetare fizice şi aparatura creată de fizicieni se aplică şi în celelalte ştiinţe ale
naturii (de exemplu, în chimie, biologie).
Fizica stabileşte legi pe baza observaţiilor şi a experimentului ştiinţific. Legea
exprimă legătura necesară şi esenţială între fenomene, legătura dintre cauză şi efect, care
condiţionează o dezvoltare determinată a fenomenelor.
Observaţia constă în studiul fenomenului în condiţiile sale naturale de desfăşurare,
în timp ce experimentul ştiinţific constă în reproducerea fenomenului în diverse condiţii
create artificial, cu scopul de a descoperi legităţile fenomenului.
Legile fizicii pot fi stabilite (descoperite sau formulate) numai într-o anumită etapă
sau grad de dezvoltare a ştiinţelor, a tehnicii, şi de obicei în urma unor nenumărate şi
7
îndelungate cercetări. După milenii de dezvoltare istorică a civilizatiei au putut fi stabilite,
de exemplu, legea mişcării planetelor (J. Kepler 1609,1619), legile mecanicii (I. Newton
1687), legea atracţiei universale (I. Newton 1687), legile mecanicii relativiste (A. Einstein
1905), legile mecanicii cuantice (1925), etc.
Domeniul fenomenelor studiate de fizică s-a lărgit odată cu dezvoltarea practicii
social-istorice a omenirii. Obiectul şi metodele fizicii au evoluat. De exemplu, în secolul 18
a predominat mecanica, în secolul 19 - electromagnetismul, iar în secolul 20 - fizica atomică
şi nucleară.
Descrierea şi explicarea fenomenelor fizice trebuie să fie cantitativă - condiţie
fundamentală a ştiinţelor exacte – de aceea matematica este un instrument indispensabil
fizicii; însă cantitatea se determină prin măsurări, de aceea măsurarea este un proces
fundamental în fizică.
Practica apare în triplu rol: de izvor de cunoştinţe, de criteriu al adevărului şi de
scop al cunoaşterii. Cercetarea ştiinţifică realizează unitatea dintre teorie şi practică, în
care rolul practicii este hotărâtor, iar rolul teoriei conducător. Practica fără teorie este
oarbă, iar teoria fără practică este sterilă.
Teoria explică un ansamblu de fenomene folosind un număr mic de ipoteze şi legi
fundamentale, numite de obicei principii, care sunt extrase din experienţă. Din acest sistem
de legi fundamentale sunt deduse teoretic toate legile cunoscute care privesc domeniul
cercetat. Orice teorie trebuie neapărat verificată în practică. Noţiunile şi mărimile fizice nu
sunt creaţii subiective arbitrare, ci reflectă realitatea obiectivă, tot mai precis şi mai deplin
odată cu dezvoltarea fizicii.
Teoriile fizice actuale nu trebuie absolutizate şi eternizate. Ele suferă a dezvoltare
treptată, ducând la un moment dat la crearea prin salt a unor teorii noi, care reflectă mai
8

bine realitatea obiectivă, conţinând ca un caz particular sau caz limită teoriile precedente şi
arătând totodată domeniul lor de valabilitate (principiul de corespondenţă).
Materia este infinită şi inepuizabilă în proprietăţile sale, în formele sale de organizare
şi manifestare. Obiectele şi fenomenele din natură se găsesc în nesfârşite interconexiuni şi
interdependenţe. De aceea, în studiul fenomenelor naturii suntem întotdeauna nevoiţi să
simplificăm, să schematizăm procesele studiate, să creăm modele teoretice ale obiectelor şi
fenomenelor. Fără schematizarea fenomenelor studiate fizica n-ar putea folosi aparatul
matematic, n-ar avea o teorie, n-ar putea conferi experienţei un scop determinat. Un model
corect trebuie să ia în considerare particularităţile principale ale fenomenului studiat, lăsând
la o parte trăsăturile secundare, neesenţiale, necaracteristice. Numai astfel se pot stabili
legile şi relaţiile cantitative. Arta cercetătorului este de a şti ce să păstreze şi ce să neglijeze
în problema propusă. Odată cu dezvoltarea fizicii, modelele sau schemele sunt perfecţionate
cantitativ şi chiar schimbate calitativ, pentru a putea exprima mai fidel realitatea obiectivă.
Exemple de schematizări şi modele: punctul material, solidul rigid, gazul ideal, gazul Van
der Waals, lichidul ideal, atomul lui Bohr, atomul din mecanica cuantică, etc.
Rezultatele fizicii au o mare importanţă pentru teoria cunoaşterii şi o mare
însemnătate practică. Rezultatele fizicii, împreună cu cele ale altor ştiinţe ale naturii, au
schimbat nu numai condiţiile de viaţă ale omenirii dar au creat noi moduri de gândire. Fizica
a pătruns în domenii inaccesibile măsurătorilor directe, acolo unde nu sunt aplicabile
etaloanele şi formele obişnuite de gândire.
9

1.1. Unităţi de măsură. Mărimi fizice fundamentale.
Măsurarea este procesul fundamental în fizică. A măsura o mărime fizică înseamnă a
stabili de câte ori se cuprinde în ea o altă mărime de aceeaşi natură, bine definită şi aleasă
prin convenţie drept unitate de măsură.
Orice măsurare fizică este întotdeauna un proces de interacţiune dintre obiectul
măsurat şi dispozitivul de măsură, proces care modifică şi starea obiectului măsurat (pentru
microparticule această perturbare este principial inevitabilă).
Nici o măsurare fizică nu este perfectă; orice măsurare fizică implică întotdeauna
erori de măsurare mai mari sau mai mici. Odată cu dezvoltarea ştiinţei şi tehnicii se
perfecţionează şi tehnica măsurătorilor. Astăzi în multe domenii, de exemplu în optică şi în
astronomie, s-a atins o precizie de măsurare extrem de înaltă.
În principiu, pentru fiecare mărime fizică se poate alege o unitate proprie arbitrară,
dar atunci legile fizicii s-ar exprima prin formule care ar conţine coeficienţi numerici
paraziţi, dependenţi de unităţile de măsură folosite. De aceea, ţinând seama de relaţiile între
diferite mărimi fizice, se alege întotdeauna un număr mic de mărimi fizice, numite mărimi
fizice fundamentale, şi pe baza acestora se construieşte un sistem coerent de unităţi de
măsură, astfel încât în cele mai frecvente şi mai importante formule fizice să dispară
coeficienţii numerici paraziţi. Celelalte mărimi fizice şi unităţile lor de măsură, legate de cele
fundamentale prin legi ale fizicii, se numesc mărimi fizice derivate, respectiv unităţi de
măsură derivate.
Nu există vreo lege a naturii care să ne impună alegerea anumitor mărimi drept
mărimi fundamentale sau să ne indice numărul acestora.
În sistemul internaţional SI, adoptat de Conferinţa Generală de Măsuri şi Greutăţi de
la Paris, din anul 1960, se disting trei clase de unităţi de măsură:
10

- unităţi fundamentale
- unităţi derivate
- unităţi suplimentare
Unităţile de măsură fundamentale sunt în număr de şapte (tabel 1.1):
Mărimea Denumirea Simbollungime, L metru m
masă, M kilogram kg
timp, T secundă s
intensitatea curentului electric, I amper A
temperatura termodinamică, θ kelvin K
cantitatea de substanţă, ν mol mol
intensitatea luminoasă, J candelă cd
Sistemul internaţional de unităţi fixează, pe lângă cele şapte unităţi fundamentale şi
două unităţi suplimentre:
Mărimea Denumirea Simbolunghi plan radian rad
unghi solid steradian sr
Coerenţa sistemului internaţional impune ca unităţile de măsură pentru mărimile
derivate să se exprime prin unităţi fundamentale şi eventual prin unităţi suplimentare. Este
clar că o mărime derivată nu se exprimă prin toate cele nouă mărimi, fundamentale sau
suplimentare, stabilite de SI. Practic toate mărimile derivate, întâlnite în cadrul mecanicii, se
exprimă numai prin trei mărimi fundamentale şi anume: lungimea L, masa M şi timpul T.
Unităţile de măsură ale mărimilor derivate ale SI se exprimă în funcţie de unităţile
fundamentale şi suplimentare prin intermediul relaţiilor de dependenţă dintre mărimi. Multe
11

din aceste unităţi au denumiri speciale şi simbol particular (N – Newton), mai comod de
folosit decât în exprimarea prin unităţile mărimilor fundamentale (kg.m/s2 pentru newton).
Pentru multipli şi submultipli diferitelor unităţi de măsură se folosesc următoarele
prefixe:
Multipli Unităţi Submultipli Unităţideca-hecto-kilo-mega-giga-tera-peta-exa-
da-h-k-M-G-T-P-E-
10 102
103
106
109
1012
1015
1018
deci-centi-mili-micro-nano-pico-femto-atto-
d-c-m-µ -n-p-f-a-
10-1
10-2
10-3
10-6
10-9
10-12
10-15
10-18
Se recomandă a nu se folosi simultan două prefixe la aceeaşi unitate de măsură şi a
nu se folosi prefixe la numitor.
În afara unităţilor SI se folosesc pe larg câteva unităţi de măsură tolerate, ca de
exemplu: kilogramul-forţă (kgf), litrul (l), calul-putere (CP), torrul (sau mm Hg).
1.2. Formule dimensionale
Dacă asociem fiecărei mărimi fundamentale câte un simbol L, M, T, I, θ , ν , J
(tabel 1.1) atunci pentru orice mărime fizică derivată x, se defineşte dimensiunea sa [x], ca
fiind monomul algebric format din puteri ale simbolurilor mărimilor fizice fundamentale,
exponentul fiecărui simbol fiind egal cu valoarea puterii la care respectiva mărime
fundamentală intră în definiţia mărimii derivate:
[x] = ηϕεδγβα νθ JITML (1.1)
Relaţia (1.1) se numeşte formula dimensională sau ecuaţia de dimensiuni a mărimii
derivate x faţă de mărimile fundamentale.
12

Coeficienţii ηϕεδγβα ,,,,,, , care pot fi întregi sau fracţionari, pozitivi sau
negativi, reprezintă dimensiunile mărimii fizice derivate în raport cu mărimile fizice
fundamentale corespunzătoare.
Ilustrăm modul de obţinere a formulelor dimensionale şi unităţile de măsură pentru
câteva mărimi derivate:
- viteza: v = dr/dt; [v] = [dr/dt] = L/T = LT-1; <v>SI = m/s
- acceleraţia: a = dv/dt; [a] = [dv/dt] = LT-1/T = LT-2 <a>SI = m/s2
- forţa: F = dp/dt; [F] = [dp/dt] = [d(mv)/dt] = LMT-2 <F>SI = kg.m/s2 = N
1.3. Analiză dimensională
Analiza dimensională este o metodă care studiază structura relaţiilor fizice pornind
de la premisa că aceste relaţii sunt corecte dimensional. Analiza dimensională se bazează pe
principiul omogenităţii dimensionale. Deoarece nu se pot aduna sau egala decât mărimi
fizice de aceeaşi natură, fiecare formulă fizică trebuie să fie omogenă din punct de vedere
dimensional, adică ambii membri ai egalităţii, cât şi fiecare termen al unei sume algebrice,
trebuie să aibă aceleaşi dimensiuni, altfel formula nu are sens. Acestă formulare reprezintă
chiar principiul omogenităţii dimensionale a formulelor fizice. Altfel spus, dacă mărimile
derivate x, y se exprimă dimensional sub forma:
[x] = .........111 γβα TML
[y] = .........222 γβα TML
atunci formula fizică:
x = y
poate fi corectă numai în cazul în care sunt satisfăcute egalităţile:
21 αα = ; 21 ββ = ; 21 γγ = ; ………
13

Aceste relaţii exprimă tocmai condiţia de omogenitate a formulelor fizice, asigurând
invarianţa legilor fizice în raport cu schimbările unităţilor de măsură pentru mărimile fizice
fundamentale.
Principiul omogenităţii dimensionale a formulelor fizice ne permite să găsim chiar
forma unor legi fizice. Presupunem că o anumită mărime fizică y depinde de alte mărimi
fizice a1, a2,....….an. Mărimea y se poate exprima faţă de de celelate n mărimi astfel:
y = const. n21 xn
x2
x1 a......aa
Scriind dimensional relaţia se obţine:
[y] = [ nxn
xx aaa ....... 2121 ] = nx
nxx aaa ][..........].[][ 21
21 = ixn
ia ][1
∏ (1.2)
Exprimând dimensiunea fiecărui termen din relaţia de mai sus în funcţie de mărimile
fizice fundamentale obţinem:
[y] = .......γβα TML
[a1] = .......111 γβα TML
[a2] = .......222 γβα TML .
. .[an] = .......nnn TML γβα
şi introducând aceste relaţii în formula (1.2) obţinem:
.......γβα TML = ixn
iii TML ......)(1
γβα∏
Exponenţii xi sunt necunoscutele sistemului:
αα =∑ i
n
i x1
ββ =∑ i
n
i x1
14

γγ =∑ i
n
i x1
. . .
Prin determinarea necunoscutelor xi se poate cunoaşte deci, prin metoda analizei
dimensionale, legea fizică dintre y şi cele n mărimi fizice a1, a2,….an, mărimi de care ştim că
aceasta depinde. Această metodă a analizei dimensionale este cunoscută şi sub denumirea
de metoda Rayleigh.
Prezentăm mai jos un exemplu de lucru cu metoda lui Rayleigh pentru deducerea
formulei perioadei pendulului gravitaţional. Ştiind din experienţă că perioada unui pendul
gravitaţional depinde de lungimea sa l şi de acceleraţia gravitaţională g, putem scrie:
T = const. 21 xx gl ⋅
Trecând la formula dimensională:
[T] = [ 21 xx gl ⋅ ] = 21 ][][ xx gl ⋅
deci: T = 22121 22 )( xxxxx TLLTL −+− ⋅=⋅
prin identificarea termenilor avem:
0 = x1 + x2
1 = -2x2
de unde rezultă: x1 = 1/2, x2 = -1/2
deci perioada pendulului este:
T = const. gl /
unde: const.- este o constantă adimensională care nu poate fi dedusă prin metoda analizei
dimensionale.
15

16
Capitolul 2: Elemente de mecanică clasică
Mecanica studiază mişcarea cea mai simplă a sistemelor fizice, anume deplasarea
lor în spaţiu şi timp, precum şi cauzele care o produc. Cinematica studiază mişcarea în
spaţiu şi timp, făcând abstracţie de cauzele mişcării. Dinamica studiază mişcarea
sistemelor fizice ţinând seama de cauzele care o produc iar statica studiază echilibrul
sistemelor fizice sub acţiunea forţelor. Sistemele fizice pot fi discrete sau continue. În
mecanică cel mai utilizat sistem – un model – este punctul material, punctul geometric în
care este concentrată masa sistemului. Un model mult utilizat este şi sistemul de puncte
materiale.
Mecanica este capitolul de bază al fizicii. Noţiunile şi legile mecanicii – forţă, lucru
mecanic, energie (cinetică, potenţială), legea fundamentală amFrr
= , principiul acţiunilor
reciproce, etc. – se aplică în toate celelalte capitole ale fizicii. Mecanica este cea dintâi
aplicaţie a matematicii la studiul cantitativ şi cauzal al fenomenelor naturii.
Mecanica şi-a elaborat un sistem de concepte, axiome şi principii care permit, prin
cunoaşterea stării de mişcare a unui sistem fizic la un moment dat, să poată fi determinată
evoluţia lui ulterioară.
2.1. Conceptele fundamentale ale mecanicii clasice
Studiul mişcării unui sistem fizic înseamnă studiul evoluţiei sistemului în spaţiu şi
timp. Spaţiul şi timpul sunt considerate în mecanica clasică mărimi absolute. Newton
afirmă despre spaţiu că “ spaţiul absolut considerat în însăşi estenţa lui şi fără nici o
legătură cu ceva extern, rămâne întotdeauna asemenea şi imobil” iar despre timp că “
timpul absolut, adevărat şi matematic în sine şi după natura sa, curge în mod uniform fără

17
nici o legătură cu ceva extern”. Spaţiul şi timpul sunt considerate în mecanica clasică
mărimi fizice, şi sunt deci supuse măsurării. În accepţiunea mecanicii clasice spaţiul este
tridimensional, nelimitat şi fără structură, adică este omogen (toate punctele spaţiului sunt
echivalente) şi izotrop (toate direcţiile sunt echivalente). Timpul este considerat universal,
unidimensional, omogen (curge uniform), şi ireversibil (curge într-un singur sens, de la
trecut prin prezent spre viitor).
Sistemele fizice sunt sisteme materiale. Una din proprietăţile materiei este masa.
Această proprietate se manifestă în două procese mai importante: la modificarea stării de
mişcare, măsura reacţiei sistemului fizic la schimbarea stării de mişcare fiind masa
inerţială mi şi la interacţiunea reciprocă dintre sistemele fizice care au această proprietate
(atracţia universală - proprietatea sistemelor fizice având masă de a se atrage reciproc, forţa
de interacţiune fiind proporţională cu masa, numită masa gravitaţională mg). Toate
experienţele au arătat, cu o foarte bună aproximaţie, că masa inerţială a unui sistem fizic
este egală cu masa sa gravitaţională. Prin urmare oricărui sistem fizic i se asociază o
mărime fizică numită masă, mărime reală şi pozitivă. Pentru mecanica clasică masa este o
mărime aditivă şi este presupusă constantă în timpul mişcării.
Deplasarea unui sistem are loc în raport cu alte corpuri. Fără aceste “alte corpuri“
nu se poate vorbi de deplasarea sistemului, care este întotdeauna relativă. O deplasare
absolută fără raportare la alte corpuri este lipsită de sens. Relativitatea mişcării este legată
de relativitatea poziţiei. Nu se poate vorbi de poziţie într-un spaţiu absolut, independent de
corpurile aflate în el, ci numai de poziţie faţă de alte corpuri. Corpul care se consideră prin
convenţie fix şi faţă de care se studiază mişcarea unui sistem fizic, se numeşte corp de
referinţă. De corpul de referinţă este legat rigid un sistem de coordonate, de exemplu, un
sistem cartezian de 3 axe ortogonale. Pentru măsurarea timpului trebuie ales un proces

18
periodic, de exemplu oscilaţiile unui pendul. Sistemul de coordonate pentru măsurarea
poziţiei şi ceasornicul pentru măsurarea timpului constituie un sistem de referinţă sau un
referenţial.
Poziţia unui punct material în raport cu acest referenţial este determinată prin
distanţa orientată de la originea sistemului de coordonate până la punct, numită vector de
poziţie. Proiecţiile vectorului de poziţie pe cele trei axe ortogonale sunt x, y, z, iar x ir
, y jr
,
z kr
sunt componentele vectorului de poziţie pe cele trei direcţii astfel încât:
kzjyixrrrrr
++= (2.1)
sau r2 = x2 + y2 +z2
unde kjirrr
,, sunt versorii celor 3 axe.
Din relaţia anterioară rezultă că poziţia unui punct este determinată de rr
sau de
proiecţiile x, y, z ale punctului pe cele trei axe ortogonale. În multe situaţii în locul
coordonatelor carteziene se folosesc coordonatele cilindrice sau cele sferice.
2.1.1. Elementele mişcării: traiectoria, viteza, acceleraţia
Se numeşte traiectorie linia sau curba descrisă de mobil în timpul mişcării sale,
adică locul geometric al punctelor prin care trece mobilul. Traiectoria poate fi rectilinie sau
curbilinie (în particular circulară). Forma traiectoriei depinde de referenţialul folosit.
Se presupune că mobilul descrie o traiectorie continuă bine determinată, în sensul
că în fiecare moment el ocupă pe traiectorie o poziţie determinată şi că această poziţie
variază în mod continuu în timpul mişcării. Aceasta înseamnă că x, y, z, coordonatele
punctului material, sunt funcţii finite, uniforme şi continue în timp. De asemenea şi
vectorul de poziţie rr
satisface aceste condiţii.
19
Dependenţa )(trrrr
= reprezintă legea mişcării. A cunoaşte relaţia )(trrrr
= este
echivalent cu a cunoaşte funcţiile:
x = x(t), y = y(t), z = z(t)
Aceste relaţii se numesc ecuaţiile parametrice ale mişcării. Eliminând timpul t între
aceste ecuaţii se obţine ecuaţia traiectoriei.
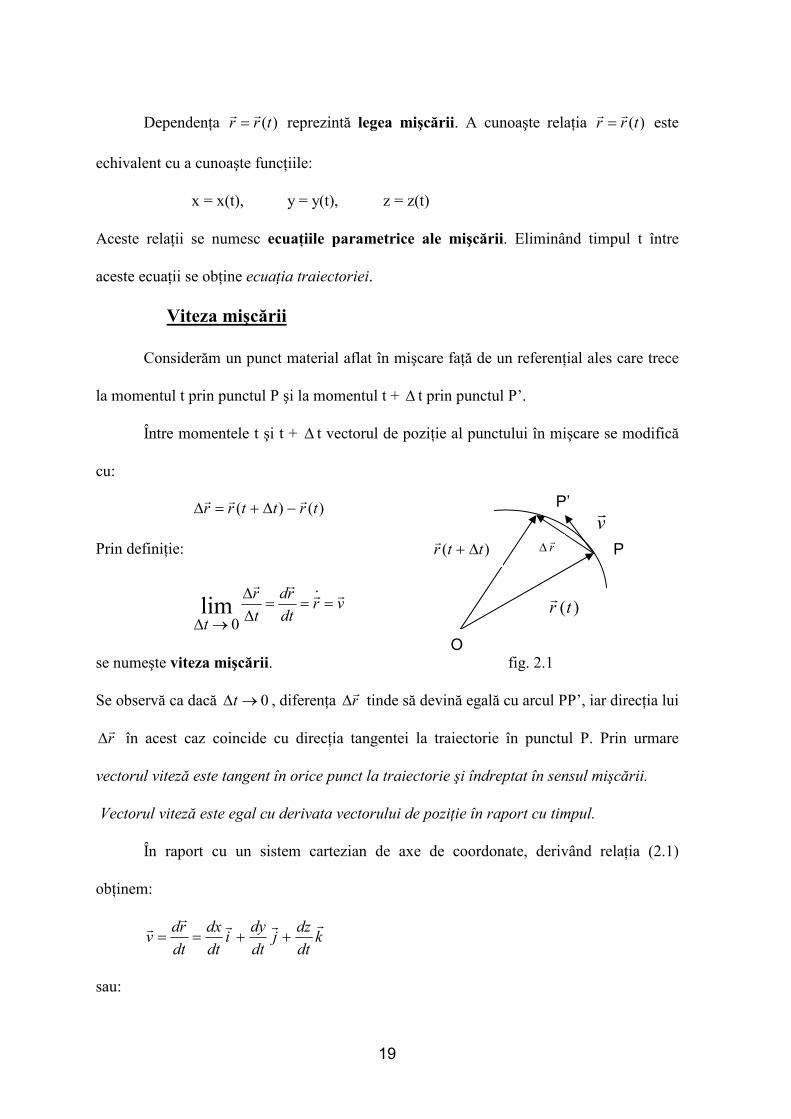
Viteza mişcării
Considerăm un punct material aflat în mişcare faţă de un referenţial ales care trece
la momentul t prin punctul P şi la momentul t + ∆ t prin punctul P’.
Între momentele t şi t + ∆ t vectorul de poziţie al punctului în mişcare se modifică
cu:
)()( trttrrrrr
−∆+=∆
Prin definiţie:
vrdtrd
tr
t
rrrr
===∆∆
→∆
.
0lim
se numeşte viteza mişcării. fig.
Se observă ca dacă 0→∆t , diferenţa rr
∆ tinde să devină egală cu a
rr
∆ în acest caz coincide cu direcţia tangentei la traiectorie în p
vectorul viteză este tangent în orice punct la traiectorie şi îndreptat
Vectorul viteză este egal cu derivata vectorului de poziţie în raport
În raport cu un sistem cartezian de axe de coordonate,
obţinem:
kdtdz
jdtdy
idtdx
dtrd
vrrrr
r++==
sau:
O
)( ttr ∆+r
rr∆
2.1
rcul PP’,
unctul P
în sensul
cu timpu
derivând
)(trr
vr
iar
. P
mi
l.
r
P
P’
direcţia lui
rin urmare
şcării.
elaţia (2.1)

20
kvjvivv zyx
rrrr++=
unde vx, vy, vz sunt componentele vitezei pe cele trei axe de coordonate.
Deci componenta vitezei pe o axă este egală cu derivata în raport cu timpul a coordonatei
respective (faţă de un referenţial cartezian ortogonal).
Cunoscând componentele vitezei, modulul său se obţine cu ajutorul relaţiei:
2222zyx vvvv ++=
Acceleraţia mişcării
Fie P şi P’ poziţiile punctului la momentele t şi respectiv t + ∆ t (fig. 2.1). În acest
interval de timp viteza mişcării s-a modificat cu:
)()( tvttvvrrr
−∆+=∆
Prin definiţie:
arvdtvd
tv
t
rrrrr
====∆∆
→∆
...
0lim
se numeşte acceleraţia mişcării.
Acceleraţia este egală cu derivata întâi a vitezei sau derivata a doua a vectorului
de poziţie în raport cu timpul.
În coordonate carteziene:
kzjyixarrrr ......
++=
sau kajaiaa zyx
rrrr++=
unde ax, ay, az sunt componentele acceleraţiei pe cele trei axe de coordonate.
Componentele acceleraţiei sunt egale cu derivatele componentelor respective ale vitezei în
raport cu timpul, sau cu derivatele de ordinul doi ale coordonatelor respective (faţă de un
referenţial cartezian).

21
Cunoscând componentele acceleraţiei, modulul său se obţine cu ajutorul relaţiei:
2222zyx aaaa ++=
În timp ce viteza este întotdeauna tangentă la traiectorie şi are sensul mişcării,
acceleraţia în mişcarea curbilinie este întotdeauna orientată spre “interiorul” traiectoriei,
adică spre partea concavă a traiectoriei, partea spre care se roteşte vectorul viteză tangent la
traiectorie.
2.2. Principiile mecanicii clasice
Mecanica clasică (newtoniană) se bazează pe principiile formulate de către Isaac
Newton în celebra sa carte “ Principiile matematice ale filosofiei naturale” (1687). Cu
ajutorul acestui sistem de principii poate fi dedusă evoluţia spaţio-temporală a orcărui
sistem mecanic ştiind starea de mişcare (poziţie şi viteză) a sistemului la un moment dat
cât şi relaţia dintre sistemul studiat cu exteriorul (ceea ce nu aparţine sistemului studiat).
Valabilitatea acestor principii a fost confirmată în mod foarte clar de către experimente.
Principiile mecanicii clasice elaborate de către Newton sunt valabile pentru mişcări
ale sistemelor fizice macroscopice cu viteze mici în raport cu viteza luminii în vid.
Principiul inerţiei
Experienţa arată că un corp în repaus faţă de Pământ rămâne în repaus atâta timp
cât asupra sa nu acţionează alte corpuri care să-i modifice această stare. De asemenea,
experienţe efectuate cu bile netede şi dure lansate pe suprafeţe orizontale netede şi dure (de
exemplu, pe gheaţă) când greutatea bilei este anulată de către reacţiunea normală a planului
şi forţele de frecare sunt mici, arată că mişcarea bilei se apropie tot mai bine de mişcarea
rectilinie uniformă. De aici, prin abstractizare, se ajunge la principiul inerţiei:

22
Un corp îşi păstrează starea de repaus sau de mişcare rectilinie uniformă atâta
timp cât asupra sa nu acţionează alte corpuri care să-i schimbe această stare de repaus
sau de mişcare rectilinie uniformă.
Principiul inerţiei nu poate fi verificat direct experimental deoarece nici un corp nu
poate fi sustras complet acţiunii altor corpuri, dar acest principiu este verificat prin toate
consecinţele sale.
Experienţa arată de asemenea că la orice acţiune exterioară care caută să schimbe
starea de repaus sau de mişcare rectilinie uniformă a corpului, corpul se opune,
reacţionează. Proprietatea unui corp de a-şi menţine starea de repaus sau de mişcare
rectilinie uniformă, în absenţa acţiunilor exterioare, sau de a se opune la orice acţiune
exterioară care caută să-i schimbe starea de mişcare, se numeşte inerţie. Astfel, corpurile
sunt inerte în sensul că nu-şi pot schimba de la sine starea lor de repaus sau de mişcare
rectilinie uniformă. În virtutea inerţiei corpurile se mişcă rectiliniu uniform în absenţa
acţiunilor exterioare şi datorită inerţiei tind să-şi menţină această stare de mişcare,
opunându-se sau reacţionând la acţiunile exterioare.
Conform principiului inerţiei, mişcarea rectilinie uniformă se autoîntreţine,
adică nu este necesară nici o cauză exterioară pentru menţinerea ei. Dimpotrivă, orice
acţiune exterioară strică o astfel de mişcare, curbând traiectoria şi modificând viteza, adică
produce o mişcare accelerată.
În formularea principiului inerţiei nu se spune nimic despre sistemul de referinţă.
Dar, evident că mişcarea rectilinie uniformă faţă de un referenţial nu mai este astfel faţă de
alte referenţiale care sunt în mişcare accelerată faţă de primul. Prin urmare, principiul
inerţiei nu poate fi valabil faţă de orice referenţial ales. Dacă însă principiul inerţiei este
valabil într-un referenţial dat, atunci el va fi automat valabil în toate referenţialele care se

23
mişcă rectiliniu uniform faţă de acesta. Sistemele de referinţă în care este valabil principiul
inerţiei se numesc sisteme de referinţă inerţiale.
Din punctul de vedere al principiului inerţiei toate sistemele de referinţă inerţiale
sunt absolut echivalente, nici unul din ele nu poate fi considerat fix sau absolut.
Pentru ca principiul inerţiei să fie valabil şi în sistemele de referinţă care se mişcă
accelerat este necesară introducerea unor forţe fictive, numite forţe de inerţie (cum ar fi
forţele centrifuge sau forţele Coriolis). Mecanica clasică presupune că este posibil
întotdeauna să se deosebească forţele reale de cele fictive.
Principiul fundamental al dinamicii
Newton a definit ca măsură a mişcării o mărime fizică numită impuls sau cantitate
de mişcare. Impulsul este egal cu produsul dintre masă şi viteză şi este un vector coliniar
cu viteza:
vmprr
=
Cu ajutorul acestei mărimi, prin modificarea stării de mişcare înţelegem
modificarea impulsului. Un sistem căruia i se modifică impulsul se află în interacţiune cu
exteriorul, deci asupra sistemului acţionează o forţă. Forţa este o măsură a interacţiunii şi
se defineşte ca fiind egală cu viteza de variaţie în timp a impulsului:
dtpd
Frr
= (2.2)
Această relaţie exprimă tocmai expresia matematică a principiului fundamental al
dinamicii, principiu care poate fi enunţat astfel:
Derivata impulsului unui corp în raport cu timpul este egală cu rezultanta forţelor
care acţionează asupra corpului respectiv.

24
Deoarece în mecanica clasică masa corpului m se consideră constantă, deci
dm/dt = 0, relaţia (2.2) se poate scrie sub forma:
amdtvd
mdtdm
vdtvd
mFr
rr
rr==+=
Relaţia amFrr
= este un caz particular al relaţiei (2.2). Această relaţie este valabilă
în aproximaţia mecanicii clasice, adică la mişcarea corpurilor cu viteze mici în raport cu
viteza luminii în vid.
Când asupra unui corp acţionează una sau mai multe forţe, calculul variaţiei
impulsului între două momente de timp ti şi tf se obţine integrând relaţia (2.2):
∫ ⋅=∆f
i
t
t
dtFprr
Dacă asupra corpului nu acţionează nici o forţă (corpul se consideră izolat), din
principiul fundamental al dinamicii rezultă că impulsul corpului este constant în timp,
adică corpul se poate mişca doar rectiliniu uniform. Din acest lucru se poate deduce că
principiul inerţiei este inclus în principiul fundamental al dinamicii. Acest lucru este însă
adevărat doar în cazul mecanicii clasice pentru care masa este constantă. În cazul mecanicii
relativiste masa corpurilor nu mai este constantă ci depinde de viteza corpului astfel încât
pentru un corp izolat:
0)( =⋅ vvmr
ceea ce înseamnă că în acest caz mişcarea poate să nu mai fie rectilinie şi uniformă.
Experienţa arată că principiul fundamental al dinamicii este valabil numai în
sisteme de referinţă inerţiale ca şi principiul inerţiei. Expresia matematică a principiului
fundamental al dinamicii nu se schimbă la trecerea de la un sistem de referinţă inerţial la
altul, deoarece nici mărimea forţei nici mărimea acceleraţiei nu se schimbă în acest caz.

25
Principiul acţiunii şi reacţiunii
Experienţa arată că acţiunea unui corp asupra altui corp poartă întotdeauna
caracterul unei interacţiuni, adică acţiunea unui corp asupra altuia naşte simultan o
reacţiune a acestuia din urmă asupra primului.
Principiul acţiunii şi reacţiunii afirmă că fiecărei acţiuni i se opune întotdeauna o
reacţiune, egală în modul şi de sens contrar, sau altfel spus, acţiunile reciproce a două
corpuri sunt întotdeauna egale în modul şi orientate în sensuri contrare. Cele două forţe,
acţiunea şi reacţiunea, sunt aplicate simultan şi la corpuri diferite.
Subliniem că în cazul acestui principiu este vorba de o interacţiune mutuală
simultană şi nu de o cauză şi un efect. Acţiunea şi reacţiunea nu apar numai la contactul a
două corpuri, ci şi în cazul interacţiunii prin intermediul unui câmp, de exemplu, atracţia
gravitaţională reciprocă dintre două corpuri sau interacţiunea dintre două corpuri cu sarcini
electrice aflate la distanţă unul de celălalt.
Principiul independenţei forţelor
Newton a dedus acest principiu tot din experienţă. În urma acţiunii asupra unui
corp a două forţe s-a constatat că acest corp se va deplasa pe direcţia diagonalei
paralelogramului determinat de cele două forţe, ceea ce nu reprezintă altceva decât regula
de compunere a două forţe cunoscută sub numele de regula paralelogramului. Acest lucru
exprimă tocmai principiul independenţei acţiunii celor două forţe. Pentru cazul acţiunii
asupra unui corp a mai multor forţe principiul independenţei forţelor poate fi generalizat
astfel: dacă asupra unui corp acţionează simultan mai multe forţe, acţiunea fiecărei forţe
este independentă de acţiunea celorlalte. Acceleraţia corpului este dată de rezultanta
acceleraţiilor produse de fiecare forţă asupra lui.

26
Principiul condiţiilor iniţiale
Ecuaţiile de mişcare ale unui sistem fizic obţinute prin aplicarea principiului
fundamental al dinamicii sunt ecuaţii diferenţiale de ordinul al doilea, iar pentru stabilirea
constantelor de integrare este necesară cunoaşterea poziţiei relative şi a vitezei relative ale
sistemului la un moment dat, de exemplu, la momentul iniţial. Astfel principiul condiţiilor
inţiale poate fi enunţat astfel: evoluţia unui sistem fizic în spaţiu şi timp este determinată
dacă sunt cunoscute poziţia relativă şi viteza relativă ale sistemului la un moment dat.
2.3. Lucrul mecanic. Puterea
Forţele pot produce deplasări ale corpurilor pe o direcţie oarecare. O măsură a
efectului util al forţei în acest proces este dată de lucrul mecanic definit prin produsul
dintre deplasare şi componenta forţei pe direcţia de deplasare, deoarece componenta
normală a forţei nu poate contribui la deplasarea dată. Astfel, lucrul mecanic elementar
este definit prin produsul scalar dintre forţa care acţionează asupra corpului Fr
şi
deplasarea elementară (infinitezimală) a acestuia rdr
între momentele t şi t + dt:
dL = rdFrr
⋅ (2.3)
Pentru o deplasare finită, lucrul mecanic are expresia:
L = ∫ ⋅f
i
r
r
rdFrr
(2.4)
În general lucrul mecanic depinde atât de stările iniţială (i) şi finală (f) precum şi de
toate stările intermediare prin care trece corpul, motiv pentru care lucrul mecanic este o
mărime de proces.

27
Ştiind că în coordonate carteziene rdr
se poate scrie:
kdzjdyidxrdrrrr
++=
relaţia (2.4) devine:
L = ∫ ⋅f
i
r
r
rdFrr
= ∫ ∫ ++=++f
i
f
i
zzyyxxzyx
t
t
dtvFvFvFdzFdyFdxF )()(
Pentru a putea calcula lucrul mecanic este necesară cunoaşterea expresiei explicite a forţei
Fr
. Cele mai întâlnite tipuri de forţe sunt:
- forţe constante: Fr
= const;
- forţe dependente de distanţă, cum ar fi forţele elastice rkFrr
−= , electrostatice
(date de legea lui Coulomb) rr
qQF
rr34πε
= , gravitaţionale (date de legea lui
Newton) rr
mMkF
rr3
−= ;
- forţe dependente de viteză, cum ar fi forţele de frecare ce se exercită la
deplasarea unor corpuri în medii fluide ncvF =r
(n≥1) sau forţele care se
exercită la deplasarea purtătorilor de sarcină electrică q şi masă m în câmpuri
magnetice de inducţie Br
, )( BvqFrrr
×= ;
- forţe dependente de timp, aşa cum sunt forţele dezvoltate de rachete, motoare,
etc.
Dacă forţa este tot timpul perpendiculară pe direcţia deplasării, lucrul mecanic
efectuat de forţă este nul. Prin urmare într-o mişcare curbilinie numai componenta
tangenţială a forţei efectuează lucru mecanic.
Lucrul mecanic are dimensiunile L2MT-2 şi se măsoară în N.m = J (joule).

28
Definim puterea momentană sau instantanee ca reprezentând derivata lucrului
mecanic la timp:
P = dtdL
Dacă lucrul mecanic este efectuat uniform, relaţia de definiţie a puterii devine:
P = dtdL
= vFdtrd
Frrrr⋅=
adică puterea dezvoltată de o forţă este egală cu produsul scalar dintre forţă şi viteză.
Unitatea de măsură pentru putere este J/s = W
O unitate de măsură tolerată este calul putere (CP): 1 CP = 736 W
2.4. Energia cinetică
O forţă care acţionează asupra unui corp îl deplasează, efectuând un lucru mecanic,
dar în acelaşi timp forţa produce şi modificarea stării de mişcare a corpului. Pornind de la
relaţia de definiţie a lucrului mecanic elementar (2.3) avem:
dL = mvdvdmvvdvmdm)v()vm(dvdtvdt
)vm(drd
dt)vm(d
rdF 22 +=+=⋅=⋅=⋅=⋅rrrrrr
rr
rrr
unde 22)( vvvv =⋅=rrr
, care prin diferenţiere dă vdvvdv =rr
Ştiind că în mecanica clasică masa este constantă relaţia de mai sus devine:
dL = rdFrr
⋅ = )mv21
(dmvdv 2= = dEc
iar prin integrare obţinem:
L = ∫ ⋅f
i
r
r
rdFrr
= ∆Ec = Ecf – Eci (2.5)
unde se defineşte:
29
Ec = 2
21
mv
şi se numeşte energia cinetică a corpului.
Relaţia (2.5):
L = ∆Ec
reprezintă teorema energiei cinetice: Lucrul mecanic efectuat de rezultanta forţelor care
acţionează asupra unui corp este egal cu variaţia energiei cinetice a corpului.
Dacă rezultanta forţelor aplicate corpului este permanent nulă, energia cinetică a
corpului se conservă (legea de consevare a energiei cinetice).
Energia cinetică este o mărime fizică scalară a mişcării. Existenţa mărimii fizice
energie cinetică şi a legii de conservare a energiei cinetice este legată de proprietatea de
omogenitate a timpului (simetria la translaţii temporale).
Mişcarea mecanică se transmite de la un corp la altul în procesul interacţiunii lor
prin intermediul forţei. Impulsul forţei ∫ ⋅=f
i
dtFHrr
, impulsul momentului forţei
∫ ∫ ×==f
i
f
i
dtFrdtMK )(rrrr
şi lucrul mecanic al forţei ∫ ⋅=f
i
rdFLrr
, măsoară cantitativ
mişcarea mecanică transmisă, fiind egale cu variaţia impulsului vmprr
= , a momentului
cinetic vmrprLrrrrr
×=×= şi respectiv a energiei cinetice Ec2
21
mv= ale corpului. Vom
demonstra aceste lucruri în paragrafele următoare deoarece ele reprezintă de fapt
principalele teoreme de variaţie şi conservare ale mecanicii.
Vom da mai departe expresia energiei cinetice a mişcării de rotaţie a unui corp.
Considerăm un corp solid rigid de volum V, omogen, a cărui densitate este ρ . Mişcarea
de rotaţie a solidului este acea mişcare în care toate punctele solidului descriu cu aceeaşi

30
viteză unghiulară cercuri paralele ale căror centre sunt situate pe o dreaptă, numită axă de
rotaţie. Fie axa de rotaţie )(∆ în jurul căreia solidul execută o mişcare de rotaţie uniformă
cu viteza unghiulară ω . Viteza unghiulară este aceeaşi pentru toate punctele solidului şi se
poate reprezenta printr-un vector de modul ω , situat de-a lungul axei de rotaţie, în sensul
dat de regula burghiului. Vectorul ωr
este vector alunecător, al cărui punct de aplicaţie
poate fi ales în orice punct al axei de rotaţie.
Un element de volum dV, de masă dVdm ρ= , situat la distanţa r faţă de axa de
rotaţie are viteza v = ω r astfel încât energia cinetică a acestui element de masă se poate
scrie:
dEc = dmrvdm 222
21
21 ω=⋅
Având în vedere că viteza unghiulară este aceeaşi pentru toate punctele solidului,
energia cinetică a mişcării de rotaţie a solidului rigid este:
Ec = 222
21
21
ωω IdmrV
=∫∫∫
unde:
∫∫∫ ∫∫∫==V V
22 dVrdmrI ρ
este momentul de inerţie al solidului rigid faţă de axa de rotaţie.
Comparând expresiile energiei cinetice de translaţie şi de rotaţie:
2
21
trtr mvE = , 2
21 ωIErot =
se vede că rolul masei m din mişcarea de translaţie îl joacă, în mişcarea de rotaţie,
momentul de inerţie I faţă de axa de rotaţie.

31
Aşa cum masa unui corp este o măsură a inerţiei sale în mişcarea de translaţie, tot
astfel momentul de inerţie faţă de o axă este o măsură a inerţiei corpului la mişcarea de
rotaţie în jurul acelei axe.
Valoarea momentului de inerţie depinde nu numai de mărimea masei corpului, ci şi
de modul cum sunt distribuite particulele corpului, adică de distanţele lor faţă de axa de
rotaţie. La aceeaşi masă totală, corpul care are masele părţilor componente mai depărtate
de axă va avea un moment de inerţie mai mare. De exemplu, momentul de inerţie al unui
inel (cilindru gol) este de două ori mai mare decât al unui disc (cilindru plin) omogen, din
acelaşi material şi de aceeaşi masă, faţă de axa lor de simetrie. Pentru a obţine un moment
de inerţie cât mai mare, materialul corpului trebuie distribuit cât mai departe de axa de
rotaţie.
Pentru orice solid rigid se poate defini o rază de inerţie (sau de giraţie) astfel:
22g
V
mRdmrI ∫∫∫ == ⇒ mI
Rg =
adică raza de inerţie reprezintă distanţa de la axa de rotaţie unde ar trebui concentrată toată
masa corpului pentru a da un moment de inerţie faţă de acea axă egal cu momentul de
inerţie al corpului dat.
2.5. Energia potenţială
Fie un punct material care se găseşte într-un câmp de forţe. Există câmpuri de forţe
numite conservative, de exemplu, câmpul gravitaţional sau câmpul electrostatic, pentru
care lucrul mecanic efectuat de forţele câmpului asupra unui punct material nu depinde de
traiectoria sau de viteza punctului material, ci numai de poziţiile iniţială şi finală. Atunci
lucrul mecanic efectuat de câmp asupra punctului material pe o traiectorie închisă este nul:

32
L = ∫ ⋅ rdFrr
= 0.
Reciproc, se poate lua această proprietate drept definiţie a câmpului conservativ:
Un câmp de forţe este conservativ dacă lucrul mecanic efectuat de forţele câmpului asupra
unui punct material este zero pe orice drum închis.
Pentru astfel de câmpuri în care lucrul mecanic este o diferenţială totală exactă
(lucrul mecanic pe o traiectorie închisă este nul) se poate defini o mărime numită energie
potenţială: diferenţiala energiei potenţiale a unui punct material este egală cu lucrul
elementar efectuat de forţele câmpului luat cu semn schimbat:
dEp = - dL
Înlocuind în relaţia de mai sus formula lucrului mecanic elementar şi integrând obţinem:
∫ ⋅−=∆r
r
rdFE
ref
p
rr ; L = -∆Ep
sau: Ep (r) = Ep ref - ∫ ⋅r
r
rdF
ref
rr (2.6)
de unde rezultă că energia potenţială a punctului material într-o anumită stare este
determinată până la valoarea unei constante arbitrare – energia potenţială a stării de
referinţă Ep ref.
Revenind la formula diferenţialei energiei potenţiale:
dEp = - rdFrr
⋅
aceasta se mai poate scrie în coordonate carteziene:
dEp = - ( Fx dx + Fy dy + Fz dz) (2.7)
Întrucât energia potenţială este o funcţie de rr
, diferenţiala ei în coordonate
carteziane se poate scrie:

33
dEp = dzz
Edy
y
Edx
x
E ppp
∂
∂+
∂
∂+
∂
∂ (2.8)
Prin egalarea relaţiilor (2.7) şi (2.8) obţinem:
x
EF p
x ∂
∂−= ;
y
EF p
y ∂
∂−= ;
z
EF p
z ∂
∂−=
sau: −=Fr
grad pE = ix
E p r
∂
∂− ( + j
y
E p r
∂
∂ + )k
z
E p r
∂
∂ (2.9)
adică forţa care se exercită asupra punctului material este egală cu gradientul luat cu
semn schimbat al energiei potenţiale (gradientul unui scalar este un vector ale cărui
componente sunt derivatele parţiale ale scalarului).
Vom da în continuare câteva expresii ale energiei potenţiale pentru diferite câmpuri
de forţe:
- câmp de forţe elastice: xkFrr
−= ; kxdxkdzjdyidxikxrdF −=++⋅−=⋅ )(rrrrrr
Ep = Ep ref - ∫ ⋅r
r
rdF
ref
rr = Ep ref ∫+
x
x
xdxk
ref
= Ep ref + 22
22refkxkx
−
făcând presupunerea că pentru x ref =0, Ep ref = 0, se obţine:
Ep (x) = 2
2kx
- câmp gravitaţional uniform: kmgFrr
−= ; mgdzkdzjdyidxkmgrdF −=++⋅−=⋅ )(rrrrrr
Ep = Ep ref - ∫ ⋅r
r
rdF
ref
rr = Ep ref ∫+
z
z
dzmg
ref
= Ep ref +mgz – mgz ref
alegând pentru z ref = 0, Ep ref = 0, se obţine:
Ep (z) = mgz
- câmp gravitaţional radial: rr
mMkF
rr3
−= ;

34
Ep(r) = Ep ref - ∫ ⋅r
r
rdF
ref
rr = Ep ref ∫
⋅+
r
rr
rdrkmM
ref
3
rr= Ep ref ∫+
r
rrdr
kmM
ref
2=
= Ep ref + )11
(rr
kmMref
−
alegând pentru r ref ∞→ , Ep ref = 0, se obţine:
Ep(r) = r
kmM−
- câmp electric radial: rr
qQF
rr34πε
=
Ep(r) = Ep ref - ∫ ⋅r
r
rdF
ref
rr = Ep ref ∫
⋅−
r
rr
rdrqQ
ref
34
rr
πε= Ep ref ∫−
r
rrdrqQ
ref
24πε=
= Ep ref + )11
(4 refrrqQ
−πε
alegând pentru r ref ∞→ , Ep ref = 0, se obţine:
Ep(r) = r
qQ 14
⋅πε
Spre deosebire de energia potenţială în câmp gravitaţional radial, care este
întotdeauna negativă, energia potenţială în câmp electric radial poate fi pozitivă sau
negativă în funcţie de semnul sarcinilor electrice q şi Q.
35
2.6. Teoremele generale ale mecanicii
Cele trei teoreme generale ale mecanicii clasice: teorema impulsului, teorema
momentului cinetic şi teorema energiei le vom trata în două situaţii: pentru un punct
material şi pentru un sistem discret de puncte materiale. Un sistem discret de puncte
materiale este un ansamblu finit de puncte materiale care nu sunt independente ci supuse la
legături reciproce, astfel încât să formeze un întreg mai mult sau mai puţin deformabil.
Exemple de astfel de sisteme de puncte materiale: un corp considerat ca ansamblu de
particule (molecule, ioni), o maşină ale cărei părţi pot fi aproximate prin puncte materiale,
sistemul solar, etc.
Asupra fiecărui punct material de masă m k din sistemul de n puncte materiale se
exercită, pe de o parte, forţe interne klFr
, ),1( nlk =≠ din partea celorlalte puncte
materiale ale sistemului şi, pe de altă parte, forţe externe extkF ,r
din partea corpurilor
externe care nu fac parte din sistem. Forţele interne sunt forţe de interacţiune dintre
punctele sistemului. Conform principiului acţiunii şi reacţiunii, forţa klFr
exercitată de
particula de masă m l asupra particulei de masă m k este egală în modul şi de sens opus cu
reacţiunea lkFr
exercitată de particula de masă m k asupra particulei de masă m l:
klFr
= - lkFr
, )0( =kkFr
sau klFr
+ lkFr
= 0
adică forţele interne sunt întotdeauna perechi, două câte două egale în modul şi de sens
opus, de aceea când sunt însumate pentru întregul sistem dau o rezultantă nulă.
Forţa internă rezultantă asupra particulei de masă m k este:
∑=
=n
lklFkF
1
rr, kl ≠
şi prin însumare asupra tuturor particulelor se obţine zero pentru rezultanta forţelor interne:

36
0int1
==∑=
n
kkFFrr
Înainte de a ne referi la momentul rezultant al forţelor interne vom reaminti
definiţia momentului unei forţe faţă de un punct (pol) arbitrar ales O.
Se defineşte momentul unei forţe Fr
faţă de un punct oarecare O ca fiind produsul
vectorial dinte vectorul de poziţie care uneşte acel punct cu originea forţei, şi forţă:
FrMrrr
×=
Modulul momentului forţei este dat de relaţia: FbFrrFM == ),sin(rr
unde b este braţul forţei, şi reprezintă distanţa de la punctul O până la direcţia forţei.
Punctul de aplicaţie al momentului forţei este în punctul ales O, direcţia sa este normală pe
planul determinat de vectorii rr
şi Fr
, iar sensul momentului forţei este dat de regula
burghiului.
Momentul forţei se măsoară în N.m .
Revenind la sistemul de puncte materiale se poate arăta uşor că momentul rezultant
al forţelor interne faţă de orice pol este nul.
Alegând un pol oarecare O, deoarece forţele interne sunt întotdeauna perechi, două
câte două egale în modul şi de sens opus, momentul rezultant faţă de polul O al celor două
forţe este zero pentru că ele au module si braţe egale faţă de O dar au sensuri diferite. Deci
momentul rezultant al tututor forţelor interne faţă de un pol oarecare este nul.
În acestă etapă putem afirma că pentru un sistem de puncte materiale rezultanta
forţelor interne şi momentul rezultant al forţelor interne faţă de orice pol sunt nule.
Cu acest rezultat vom trece la tratarea celor trei teoreme generale ale mecanicii, în
cele două situaţii – pentru punctul material şi pentru un sistem de puncte materiale.

37
2.6.1. Teorema impulsului
Pentru un punct material de masă m principiul fundamental al dinamicii :
dtpd
Frr
= , unde vmprr
=
afirmă că forţa aplicată punctului material (sau rezultanta mai multor forţe) este egală cu
derivata impulsului punctului material în raport cu timpul.
Din ecuaţia de mai sus rezultă:
pddtFrr
=
iar prin integrare:
Hr
∫=2
1
t
t
dtFr
= ppprrr
∆=− 12 (2.10)
Integrala Hr
= ∫2
1
t
t
dtFr
se numeşte impulsul forţei iar ecuaţia (2.10) exprimă matematic
tocmai teorema impulsului pentru punctul material: Impulsul forţei rezultante aplicate
punctului material este egal cu variaţia impulsului punctului material.
Dacă rezultanta forţelor aplicate punctului material este nulă, impulsul punctului
material se conservă, adică punctul material rămâne în repaus sau în mişcare rectilinie
uniformă.
Să considerăm în continuare un sistem de n puncte materiale asupra căruia
acţionează mai multe forţe externe şi a căror rezultantă este extFr
.
Să scriem ecuaţia principiului fundamental al dinamicii pentru fiecare punct
material al sistemului:
extkFkFdt
kpd
,rr
r
+=

38
Prin însumare asupra tuturor punctelor materiale ale sistemului, obţinem:
),(11∑∑==
+=n
k
n
kextkFkF
dtkpd rr
r
sau: ∑ ∑∑= ==
+=n
k
n
k
n
kextkFkFkp
dtd
1 11,
rrr
Ştiind că extFextkFn
k
rr=∑
=1, ; ∑
=
n
kkF
1
r= 0 (rezultanta forţelor interne este nulă) şi notând cu
∑=
=n
kkpP
1
rr impulsul total al sistemului, obţinem:
extFdtPd rr
=
Această relaţie exprimă matematic tocmai teorema impulsului pentru un sistem
de puncte materiale: derivata în raport cu timpul a impulsului total al unui sistem de
puncte materiale este egală cu rezultanta forţelor externe aplicte sistemului.
Dacă rezultanta forţelor externe este permanent nulă, impulsul total al sistemului
se conservă. Sistemul nu-şi poate schimba impulsul său total decât sub acţiunea unei forţe
rezultante externe, forţele interne nu pot schimba impulsul total al unui sistem de puncte
materiale ci pot doar redistribui impulsul între părţile componente ale sistemului.
2.6.2 Teorema momentului cinetic
În acelaşi fel în care am definit momentul forţei faţă de un pol, se defineşte şi
momentul impulsului sau momentul cinetic al punctului material, doar că se înlocuieşte
forţa Fr
cu impulsul pr
vmr
= al punctului material:
vmrprLrrrrr
×=×=

39
Derivând relaţia de mai sus în raport cu timpul şi înlocuind derivata impulsului cu
forţa, conform ecuaţiei principiului fundamental al dinamicii, obţinem:
MFrdtpd
rpdtrd
dtLd rrr
rrr
rr
=×=×+×= (2.11)
deoarece 0=×=× pvpdtrd rrrr
, vr
şi pr
fiind vectori paraleli. Deci:
dtLd
Mr
r=
Momentul forţei este egal cu derivata momentului cinetic în raport cu timpul.
Momentul forţei şi momentul cinetic se consideră faţă de acelaşi pol fix într-un sistem de
referinţă inerţial.
Analog, ca la teorema impulsului, se obţine teorema momentului cinetic pentru
punctul material:
∫ −=∆==2
1
12
t
t
LLLdtMKrrrrr
adică: impulsul momentului forţei rezultante aplicate punctului material este egal cu
variaţia momentului cinetic al punctului material.
Dacă momentul forţei rezultante este permanent nul, momentul cinetic al
punctului material se conservă sau altfel spus un punct material nu-şi poate schimba
momentul său cinetic decât sub acţiunea unui moment al forţei.
Să considerăm în continuare un sistem de n puncte materiale şi să aplicăm relaţia
(2.11) fiecărui punct material al sistemului:
ext,kMkMext,kFkrkFkr)kpkr(dtd
kLdtd rrrrrrrrr
+=×+×=×=
Însumând după toate punctele sistemului rezultă:

40
∑ ∑= =
+=n
k
n
kextkMkMkL
dtd
1 1
),(rrr
sau: ∑ ∑ ∑= = =
+=n
k
n
k
n
kextkMkMkL
dtd
1 1 1,
rrr
Ştiind că: extMextkMn
k
rr=∑
=1, ; 0
1
=∑=
n
kkM
r (momentul rezultant al forţelor interne faţă
de orice pol este nul) şi notând cu ∑=
=n
kkLL
1
rrmomentul cinetic total al sistemului faţă de
un pol, obţinem:
extMdtLd rr
=
Această relaţie exprimă matematic tocmai teorema momentului cinetic pentru un
sistem de puncte materiale: Derivata în raport cu timpul a momentului cinetic total al
sistemului de puncte materiale faţă de un pol dat este egală cu momentul rezultant al
forţelor externe faţă de acelaşi pol.
2.6.3. Teorema energiei
Să considerăm mişcarea unui punct material într-un câmp de forţe conservativ.
Aplicând teorema energiei cinetice (2.5), obţinem:
L = ∫ ∆=⋅2
1
rdFrr
Ec = - ∆Ep (deoarece L = - ∆Ep)
rezultă: ∆Ec + ∆Ep = ∆(Ec + Ep) = 0 ⇒ ∆E = 0 ⇒ E= constantă
sau: Ec1 + Ep1 = Ec2 + Ep2 (2.12)
unde E = Ec + Ep se numeşte energia mecanică.

41
Relaţia (2.12) reprezintă tocmai teorema conservării energiei mecanice: Într-un
câmp de forţe conservative are loc în timpul mişcării o transformare reciprocă a energiei
cinetice şi potenţiale ale punctului material, suma lor rămânând constantă.
Pentru un câmp de forţe neconservative (disipative), când lucrul mecanic depinde
de traiectorie şi de modul de mişcare, nu există energia potenţială, şi atunci energia
mecanică, sub formă de energie cinetică, nu se conservă, ci se transformă în alte forme de
energie nemecanice. De exemplu, în cazul forţelor de frecare, când lucrul mecanic depinde
de lungimea drumului şi nu este nul pe un drum închis, energia mecanică se transformă în
căldură.
Să presupunem acum că punctul material se află într-un câmp de forţe conservative
Fr
şi este supus în acelaşi timp la o forţă neconservativă (disipativă) 'Fr
. Aplicând din nou
teorema energiei cinetice, obţinem:
∫ =⋅+=2
1
rd)'FF(L ∆rrr
Ec sau ∆Ec = ∫ ∫ ∆−=⋅+⋅2
1
2
1
' rdFrdFrrrr
Ep + L’
deci rezultă:
L’ = ∆=⋅∫2
1
' rdFrr
(Ec + Ep) =∆E
Lucrul mecanic al forţelor neconservative (disipative) L’ aplicate punctului
material este egal cu variaţia energiei mecanice a punctului material.
De exemplu, lucrul mecanic al forţelor de frecare, care este întotdeauna negativ,
deoarece forţele de frecare sunt orientate în sens contrar sensului de mişcare, produce o
scădere a energiei mecanice, transformând-o în căldură.
Să considerăm în continuare un sistem de n puncte materiale şi să aplicăm teorema
energiei cinetice (în forma diferenţială) fiecărui punct material al sistemului:

42
extkdLkdLkrdextkFkFkvkmd ,),()21
( 2 +=⋅+=rrr
Însumând pentru toate punctele sistemului şi integrând, obţinem:
∑=
n
kkvkmd
1
2 )21
( = ∑=
+=⋅+n
kextdLdLkrdextkFkF
1
),(rrr
∆∑=
n
kkvkm
1
2
21
=∆Ec = ∑∫=
+=⋅+n
kextLLkrdextkFkF
1
2
1
),(rrr
∆Ec = extLL +
Variaţia energiei cinetice totale a sistemului de puncte materiale este egală cu
lucrul mecanic efectuat de toate forţele, atât externe, cât şi interne.
Forţele interne pot mări sau micşora energia cinetică totală a sistemului pe seama
altor forme de energie, prin intermediul lucrului mecanic al forţelor interne.
În cazul solidului rigid , alcătuit dintr-un sistem de puncte materiale care formează
un întreg nedeformabil, lucrul mecanic al forţelor interne este nul şi numai forţele externe
pot schimba energia sa cinetică.
Un alt caz important este acela în care forţele interne sunt consevative. În acest caz
se poate introduce energia potenţială a sistemului în funcţie numai de poziţiile tuturor
punctelor materiale ale sistemului, adică funcţie numai de configuraţia sistemului:
L = ∆−=⋅∑∫=
krdkFn
k
rr
1
2
1
Ep
Teorema energiei cinetice devine în acest caz:
∆Ec = -∆Ep + extL
sau: ∆ (Ec +Ep) = extL

43
Prin urmare, variaţia energiei mecanice a unui sistem conservativ este egală cu
lucrul mecanic al forţelor externe aplicate. De aici rezultă teorema conservării energiei
mecanice a unui sistem conservativ izolat.

44
2.7. Oscilaţii şi unde elastice
Prin mişcare oscilatorie se înţelege orice transformare a energiei unui sistem dintr-o
formă în alta, periodic sau cvasiperiodic, reversibil sau parţial reversibil. Pe scurt, sistemul
care oscilează se numeşte oscilator, iar mişcarea ca atare-oscilaţie. Oscilaţia este periodică,
dacă oscilatorul revine în aceeaşi stare după un interval de timp T numit perioadă, iar dacă
perioadele diferă puţin, deci nu sunt strict egale, oscilaţia este cvasiperiodică. Dacă energia
oscilatorului se păstrează constantă, procesul de oscilaţie este reversibil, iar dacă oscilatorul
pierde o parte din energia sa, cedând-o mediului ambiant, mişcarea oscilatorie este un proces
parţial reversibil, energia fiind pierdută printr-un proces ireversibil.
Toate mediile materiale (solide, lichide, gazoase) sunt medii deformabile. Supuse
unor solicitări (întindere sau comprimare) aceste medii îşi modifică dimensiunile. Dacă în
mediu, în urma deformării, apar forţe care tind să aducă particulele mediului în stare
nedeformată, mediul se numeşte elastic. Elasticitatea unui mediu este caracterizată prin
modulul de elasticitate (E) sau prin inversul lui, numit coeficient de compresibilitate ( β ).
Procesul de propagare a unei oscilaţii într-un astfel de mediul elastic se numeşte undă. Şi
unda este un fenomen periodic, iar din punct de vedere energetic are aceleeaşi tipuri de
caracteristici ca şi oscilaţia, energia undei putând rămâne constantă sau putându-se pierde
prin procese parţial reversibile sau ireversibile.
Pentru caracterizarea cantitativă a unei oscilaţii va fi nevoie de o funcţie care să depindă de
timp (numită elongaţie), iar pentru caracterizarea unei unde este necesară o funcţie care să
depindă atât de timp, cât şi de variabilele spaţiale (numită funcţie de undă). Aceste funcţii
trebuie să fie funcţii periodice atât în raport cu timpul, cât şi în raport cu variabilele spaţiale.
Cele mai importante oscilaţii sunt oscilaţiile armonice, adică acele oscilaţii în care mărimile
caracteristice se modifică după o funcţie armonică (sinus, cosinus, exponenţială complexă).

45
2.7.1. Oscilaţii armonice
Acest tip de oscilaţii este cauzat de acţiunea forţelor elastice Fe, forţe care sunt
proporţionale şi de semn contrar cu elongaţia y (depărtarea faţă de poziţia de echilibru la un
moment t): kyFe −=
unde k se numeşte constanta elastică.
Dacă un corp de masă m este supus numai acţiunii forţei elastice, el va executa oscilaţii
armonice liniare. Oscilaţiile armonice liniare se fac după o singură direcţie, iar asupra
corpului acţionează numai forţe elastice.
Conform principiului al doilea al mecanicii clasice, vom putea scrie:
kydt
ydm −=
2
2
Aceasta este o ecuaţie diferenţială de ordinul doi, cu coeficienţi constanţi şi omogenă (fără
termen liber), care se poate scrie sub forma:
oydt
yd=+ 2
02
2
ω (2.13)
mărimea notată cu ωo, se numeşte pulsaţie proprie a oscilaţiei, legată de perioada oscilaţiilor
proprii To sau de frecvenţa oscilaţiilor proprii 0ν prin relaţia:
00
0 22
πνπ
ω ===Tm
k
Soluţia unei astfel de ecuaţii diferenţiale (2.13) se caută sub forma:
rtCey −=
astfel că dupa înlocuierea soluţiei în ecuaţie se obţine:
020
2 =+ωr

46
Această ecuaţie se numeşte ecuaţia caracteristică a ecuaţiei diferenţiale, rădăcinile ecuaţiei
caracteristice fiind: 02,1 ωir ±= ,
iar soluţia ecuaţiei diferenţiale este:
ti
eCti
eCy 02
01
ωω −+=
Folosid formula Euler:
ixexix =+ sincos
şi înlocuind constantele de integrare C1 şi C2 cu alte două constante A şiϕ :
21sin CCA +=ϕ şi )(cos 21 CCiA −=ϕ
soluţia ecuaţiei diferenţiale se poate scrie în forma mai comodă şi mai des utilizată:
)sin( 0 ϕω += tAy
unde apar două constante de integrare: A – amplitudinea oscilaţiilor (distanţa sau depărtarea
maximă a oscilatorului faţă de poziţia sa de echilibru) şi φ – faza iniţială, o mărime care
precizează poziţia iniţială (la momentul t = 0) a oscilatorului, faţă de poziţia sa de echilibru.
Constantele de integrare se pot determina doar dacă se cunosc cele două condiţii iniţiale
privind oscilatorul, adică poziţia şi viteza iniţială ale acestuia.
Argumentul funcţiei armonice (sinus sau cosinus) se numeşte faza oscilaţiei.
Viteza de oscilaţie v reprezintă viteza cu care se depărtează sau se apropie oscilatorul de
poziţia sa de echilibru şi are expresia:
)cos( 00 ϕωω +== tAdt
dyv
iar energia cinetică a oscilatorului este:
)(cos22
10
2220
2
ϕωω
+=
= tAm
dt
dymEc
Acţiunea forţei elastice determină oscilatorul să acumuleze o energie potenţială elastică:

47
==2
2ykE p )(sin
2 022
20 ϕω
ω+tA
m
astfel că energia mecanică totală a oscilatorului este:
2
2kAEEE pc =+=
Această relaţie reprezintă legea conservării energiei în cazul oscilatorului armonic liniar.
Energia cinetică şi energia potenţială elastică a oscilatorului sunt variabile în timp,
transformându-se una în alta, dar în aşa fel încât suma lor (energia mecanică totală) să rămână
constantă.
2.7.2. Compunerea oscilaţiilor armonice
Dacă un oscilator participă simultan la două sau mai multe mişcări oscilatorii
armonice, mişcarea lui este compusă, el executând o mişcare dată de rezultanta mişcărilor
oscilatorii armonice individuale.
Expresia matematică a mişcării rezultante a oscilatorului se poate determina prin două
metode:
- metoda fazorială, în care un fazor reprezintă un vector de modul A, care se roteşte cu viteza
unghiulară ω0 şi la momentul iniţial se află orientat sub unghiul φ faţă de axa Ox.
- metoda trigonometrică, metodă care se bazează pe separarea părţii temporale a fazei de
partea care conţine faza iniţială, fapt ce revine la utilizarea formulelor trigonometrice:
αββαβα cossincossin)sin( ±=± (2.14)
Există multe situaţii de compunere a oscilaţiilor armonice, iar dintre acestea vom aminti
următoarele:

48
I. Compunerea oscilaţiilor paralele şi de aceeaşi pulsaţie
Să considerăm două oscilaţii armonice individuale de forma:
)sin( 1011 ϕω += tAy
)sin( 2022 ϕω += tAy
iar oscilaţia armonică rezultantă: 21 yyy += , va fi de forma:
)sin( 0 ϕω += tAy
deci: )sin( 0 ϕω +tA = )sin( 101 ϕω +tA + )sin( 202 ϕω +tA
Să determinăm amplitudinea A şi faza iniţială φ a oscilaţiei armonice rezultante. În acest scop
vom dezvolta funcţiile sinus din relaţiile precedente, utilizând formula trigonometrică
indicată mai sus (2.14) şi vom egala factorii din faţa funcţiilor sinus şi cosinus de argument
ω0 t. După calcule elementare, vom obţine:
)cos(2 122122
21 ϕϕ −++= AAAAA
2211
2211
coscos
sinsin
ϕϕϕϕ
ϕAA
AAtg
+
+=
Oscilaţia armonică rezultantă va avea amplitudinea cuprinsă în intervalul:
2121 AAAAA +≤≤−
valoarea ei minimă fiind zero dacă amplitudinile oscilaţiilor iniţiale sunt egale, iar diferenţa
de fază egală cu π (opoziţie de fază).
II. Compunerea oscilaţiilor paralele şi de pulsaţie puţin diferită
Dacă pulsaţiile celor două oscilaţii diferă puţin, adică:
01 ωω = şi ωωω ∆+= 02

49
atunci fazele iniţiale ale oscilaţiilor individuale sunt (se observă că faza iniţială a celei de a
doua oscilaţii depinde uşor de timp):
11 ϕϕ → şi tωϕϕ ∆+→ 22
Putem aplica raţionamentul din paragraful anterior, astfel încât amplitudinea oscilaţiei
rezultante va fi în acest caz:
)cos(2 122122
21 ϕϕω −+∆++= tAAAAA
În cazul particular, când amplitudinile oscilaţiilor iniţiale sunt egale (A1 = A2), expresia de
mai sus devine:
)22
cos(2 121
ϕϕω −+
∆=
tAA
În acest caz, oscilaţia rezultantă poate fi considerată o oscilaţie armonică de pulsaţie 0ω , dar
modulată în amplitudine de funcţia cosinus având argumentul de mai sus, iar faza ei iniţială
depinde foarte uşor de timp. Perioada Tb de modificare în timp a amplitudinii este dată de
intervalul dintre momentele de timp în care aceasta devine zero, adică intervalul de timp în care
argumentul funcţiei cosinus se modifică cu valoarea π :
=−
+∆
2212 ϕϕω
bT2
12 ϕϕπ
−+
şi rezultă expresia perioadei căutate:
ωπ
ωωπ
∆=
−=
22
12bT
Acest fenomen poartă numele de fenomen de bătăi, prin analogie cu cazul din acustică, în
care intensitatea sunetului prezintă întăriri şi slăbiri succesive. Fenomenul este cu atat mai
evident şi mai uşor de observat, cu cât diferenţa celor două pulsaţii ω∆ este mai mică,
perioada batăilor Tb devenind în acest caz mult mai mare.

50
III. Compunerea oscilaţiilor perpendiculare de aceeaşi pulsaţie
Dacă un oscilator este supus acţiunii a două forţe elastice de direcţii perpendiculare, adică
execută două oscilaţii armonice individuale de forma:
tAx x 0sinω=
)sin( 0 ϕω ∆+= tAy y unde: 12 ϕϕϕ −=∆ → diferenţa de fază
atunci are loc compunerea celor două oscilaţii armonice de aceeaşi pulsaţie, dar pe direcţii
perpendiculare.
Dezvoltând funcţia sinus şi înlocuind t0sinω din a doua relatie cu valoarea sa din prima
relatie, după efectuarea calculelor obţinem că traiectoria mişcării oscilatorului va fi în acest
caz o elipsă generalizată dată de ecuaţia:
ϕϕ ∆=∆−+ 22
2
2
2
sincos2yxyx AA
xy
A
y
A
x
Forma ei depinde atât de diferenţa de fază dintre cele două oscilaţii individuale, cât şi de
mărimea celor două amplitudini. Pentru diferite diferenţe de fază 0=∆ϕ , 2/π , π , 2/3π ,
π2 , forma traiectoriei devine mai simplă, aşa cum este redată în figura de mai jos (fig. 2.2).
3
= 0 =2
=
==
2=2
fig. 2.2

51
Dacă pulsaţiile oscilaţiilor perpendiculare sunt diferite, traiectoriile mişcării oscilatorului
sunt, în general, nişte curbe deschise. Numai dacă raportul pulsaţiilor este un număr raţional
traiectoriile sunt curbe închise, numite figurile lui Lissajoux.
2.7.3. Oscilaţii amortizate
Dacă asupra unui corp (oscilator) de masă m acţionează, în afară de forţa elastică, o
forţă de rezistenţă (de frecare), proporţională şi de semn contrar cu viteza:
dt
dybFr −= cu constb =
atunci oscilaţiile pe care le va executa corpul se numesc oscilaţii amortizate.
Principiul al doilea al dinamicii se scrie în acest caz:
dt
dybky
dt
ydm −−=
2
2
relaţie care conduce la ecuaţia diferenţială a mişcării:
oydt
dy
dt
yd=++ 2
02
2
2 ωβ (2.15)
În această ecuaţie am utilizat o nouă notaţie:
m
b
2=β
în care b este constanta de proporţionalitate a forţei de frecare, iar β senumeşte coeficient de
amortizare.
Dacă frecarea este mare, deci β ≥ 0ω soluţia ecuaţiei diferenţiale a mişcării (2.15) nu este
specifică unei mişcări amortizate, elongaţia se atenuează exponenţial în timp, pană când
mişcarea corpului încetează, acest tip de mişcare numindu-se mişcare aperiodică (sau
mişcare aperiodică critică pentru cazul în care β = 0ω ).
52
În schimb, dacă frecarea este mică, deci β < 0ω , şi urmăm aceleaşi etape de rezolvare a
ecuaţiei diferenţiale a mişcării (2.15) ca şi în cazul ecuaţiei oscilaţiilor armonice(2.13), atunci
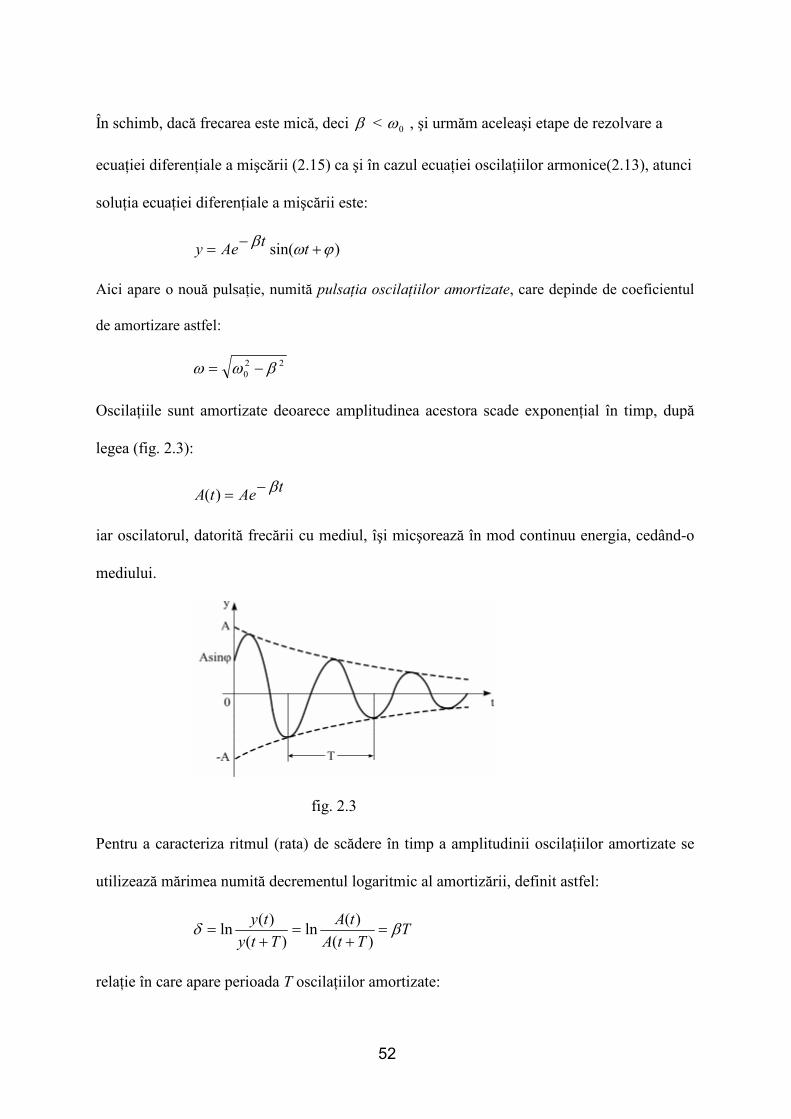
soluţia ecuaţiei diferenţiale a mişcării este:
)sin( ϕωβ +−= ttAey
Aici apare o nouă pulsaţie, numită pulsaţia oscilaţiilor amortizate, care depinde de coeficientul
de amortizare astfel:
220 βωω −=
Oscilaţiile sunt amortizate deoarece amplitudinea acestora scade exponenţial în timp, după
legea (fig. 2.3):
tAetA β−=)(
iar oscilatorul, datorită frecării cu mediul, îşi micşorează în mod continuu energia, cedând-o
mediului.
fig. 2.3
Pentru a caracteriza ritmul (rata) de scădere în timp a amplitudinii oscilaţiilor amortizate se
utilizează mărimea numită decrementul logaritmic al amortizării, definit astfel:
TTtA
tA
Tty
tyβδ =
+=
+=
)(
)(ln
)(
)(ln
relaţie în care apare perioada T oscilaţiilor amortizate:
53
22
0
22
βω
πωπ
−==T
Oscilatorul amortizat are o perioadă de oscilaţie T mai mare (oscilează mai lent, deci cu o
frecvenţă mai mică) decât perioada de oscilaţie T0 a oscilatorului armonic liber (neamortizat),
datorită pierderii continue de energie prin amortizarea oscilaţiilor.
Oscilaţiile din natură sunt amortizate, deoarece, întotdeauna, asupra oscilatorului acţionează
forţe de frecare.
2.7.4. Oscilaţii forţate şi rezonanţa
Pentru a compensa pierderile de energie datorită amortizării oscilaţiilor, asupra
oscilatorului trebuie acţionat cu o forţă perturbatoare exterioară periodică, forţă care
determină oscilatorul să execute un nou tip de oscilaţii, numite oscilaţii forţate. Sistemul
oscilant (oscilatorul) va intra în regim de oscilaţii forţate dacă forţa exterioară este periodică.
Se ştie că orice funcţie periodică poate fi descompusă într-o serie Fourier de funcţii armonice.
De aceea, să considerăm că forţa exterioară este de tip armonic (funcţiile armonice sunt
funcţii periodice), având expresia:
tFF pωsin0=
iar ecuaţia diferenţială corespunzătoare în acest caz se poate obţine în mod analog ca şi
pentru cazurile precedente:
tm
Fy
dt
dy
dt
ydpωωβ sin2 02
02
2
=++
Aceasta este o ecuaţie diferenţială de ordinul doi cu coeficienţi constanţi şi neomogenă (care
are termen liber). Soluţia ei generală este o sumă dintre soluţia generală a ecuaţiei omogene
(ecuaţia conţinută în membrul stâng, care este chiar ecuaţia oscilaţiilor amortizate) şi soluţia

54
particulară a ecuaţiei neomogene (care are, de obicei, forma termenului liber):
)sin()sin( ppp tAttAey ϕωϕωβ +++−=
Se observă că soluţia ecuaţiei omogene (primul termen), care scade exponenţial în timp,
caracterizează regimul tranzitoriu şi, după un timp teoretic infinit, dar practic finit, ea devine
egală cu zero. După acest moment soluţia va conţine doar termenul al doilea, iar mişcarea va
intra într-un regim staţionar de oscilaţii forţate, adică nişte oscilaţii armonice neamortizate, cu
amplitudinea Ap şi pulsaţie egală cu pulsaţia forţei exterioare perturbatoare ωp . Solutia
ecuaţiei oscilaţiilor întreţinute (oscilaţiilor forţate) în regim stationar este:
)sin( ppp tAy ϕω +=
Deoarece acestă soluţie trebuie să fie valabilă în orice moment al regimului staţionar,
înlocuind această expresie în ecuaţia diferenţială a oscilaţiilor amortizate şi alegând două
momente de timp convenabile, se obţine un sistem de două ecuaţii algebrice din care se poate
afla atât amplitudinea oscilaţiilor forţate:
( ) 22222
0
0
4 pp
p
FA
ωβωω +−=
cât şi faza iniţială a oscilaţiilor forţate:
−
−=
220
2
p
pp arctg
ωω
βωϕ
Cele două mărimi pA şi pϕ pot fi de asemenea deduse şi prin metoda fazorială descrisă în
paginile anterioare.
Aceste două mărimi care caracterizează oscilaţiile forţate depind esenţial de pulsaţia ωp a
forţei perturbatoare periodice exterioare. Dacă pulsaţia forţei exterioare ωp se apropie de
valoarea pulsaţiei proprii ωo a oscilatorului, atunci amplitudinea oscilaţiilor forţate creşte

55
foarte mult. Acest fenomen poartă numele de fenomen de rezonanţă, iar oscilaţia cu
amplitudine maximă a oscilatorului se numeşte oscilaţie de rezonanţă. Dacă nu ar exista
frecare, deci dacă ar fi β = 0, atunci amplitudinea Ap la rezonanţă ar creşte foarte mult. Totuşi,
acest fapt nu se întâmplă în mod practic deoarece, întotdeauna, frecarea este prezentă, chiar
dacă β are valori foarte mici. În anumite cazuri, când ωp se apropie foarte mult de ωo ,
amplitudinea Ap la rezonanţă creşte atât de mult încât poate duce la distrugerea mecanică a
materialului din care este confecţionat oscilatorul. De aceea, la proiectarea podurilor,
clădirilor, a dispozitivelor mecanice sau electronice, trebuie ţinut cont că este posibil să apară
fenomenul de rezonanţă.
Pentru a afla valorea amplitudinii maxime (amplitudinii de rezonanţă), să reprezentăm grafic
fig. 2.4
dependenţa amplitudinii Ap de pulsaţia ωp a forţei exterioare, curbă care se numeşte curbă de
rezonanţă (fig. 2.4). Impunând condiţia de maxim, obţinem:
0=p
p
d
dA
ω, ⇒
220
0,
2 βωβ −=
m
FA rezp
expresie care se realizează pentru valorea pulsaţiei de rezonanţă egală cu:
220 2βωωω −== rezp
56
Pentru a compensa pierderile de energie prin frecare, trebuie introdusă periodic din exterior
energie şi aceasta se realizează prin acţiunea forţei periodice exterioare.
2.7.5. Unde elastice. Ecuaţia undei plane
Mediile continue (gaze, lichide şi solide) sunt sisteme de particule legate, adică
particule (molecule, atomi sau ioni) care interacţionează între ele. De aceea, dacă una din
particule oscilează, vor începe să oscileze şi particulele vecine, oscilaţia propagându-se de la
particulă la particulă. Procesul de propagare a unei oscilaţii în mediul ambiant se numeşte
undă. În decursul propagării undei, fiecare particulă a mediului oscilează în jurul poziţiei sale
de echilibru, mişcarea oscilatorie propagându-se din aproape în aproape, dar nu instantaneu,
ci cu o viteză u finită. Totalitatea punctelor la care a ajuns unda la un moment dat t, puncte
care oscilează în fază, se numeşte suprafaţă de undă. Cea mai depărtată suprafaţă de undă la
un moment dat faţă de sursa undelor se numeşte front de undă.
Forma geometrică a frontului de undă determină denumirea undei (undă plană, undă sferică,
undă cilindrică ).
După relaţia dintre direcţia deplasării particulelor mediului (direcţia de oscilaţie) şi direcţia
propagării undelor, deosebim:
- unde longitudinale: direcţia lor de oscilaţie este coliniară cu direcţia de propagare. Aceste
unde se propagă în toate mediile (solide, lichide, gazoase).
- unde transversale: direcţia lor de oscilaţie este perpendiculară pe direcţia de propagare.
Aceste unde se propagă doar în solide, deoarece solidele sunt singurele medii care pot
menţine tensiuni tangenţiale.

57
În continuare ne vom ocupa de studiul undelor plane. Pentru a deduce ecuaţia undei plane, să
considerăm că punctual S, în care se găseşte sursa undelor, oscilează cu amplitudine
constantă, deci fără amortizare, conform relaţiei:
tAyS ωsin=
În general, elongaţia y nu trebuie neapărat să aibă semnificaţia unei lungimi, ea poate
desemna şi o mărime fizică ondulatorie oarecare, de exemplu: presiunea, respectiv
intensitatea câmpului electric sau intensitatea câmpului magnetic. În general, în aceste cazuri,
elongaţia nu se notează cu y, ci cu Ψ, purtând numele de funcţie de undă. Elongaţia este o
funcţie doar de variabila timp, pe când funcţia de undă depinde atât de timp cât şi de
coordonatele spaţiale x, z, y.
Un punct M din mediu, situat la distanţa x de sursă, va intra în oscilaţie mai târziu, după un
interval de timp:
u
xt =1
adică exact timpul necesar ca unda, care se propagă cu viteza u, să străbată distanţa x dintre S
şi M . Deci, în punctul M ecuaţia oscilaţiei va avea forma:
)(sin 1ttAyM −= ω
Ţinând cont că lungimea de undă λ a undei reprezintă distanţa străbătută de undă în timpul
unei perioade T a oscilaţiei, adică:
uT=λ
vom obţine soluţia undei armonice plane:
−=
−=λ
πωx
T
tA
u
xtAyM 2sinsin
sau: )sin( kxtAyM −= ω ,

58
unde λπ2
=k si se numeste număr de undă.
Înlocuind pe My , cu Ψ , evidenţiind prin aceasta că funcţia de undă depinde atât de timp cât
şi de coordonatele spaţiale x, y, z, soluţia undei armonice plane se scrie:
)sin(),( kxtAtx −= ωψ
Efectuând derivata a doua partială a funcţiei de undă în raport cu timpul t, respectiv cu
distanţa x, obţinem:
Ψ−=∂
Ψ∂ 22
2
ωt
Ψ−=∂
Ψ∂ 22
2
kx
şi împarţind cele două derivate:
22
2
2
2
2
uk
x
t =
=
∂
Ψ∂∂
Ψ∂ω
rezultă ecuaţia undelor plane:
01
2
2
2
2
=∂
Ψ∂−
∂
Ψ∂
tux
Prin generalizare, considerând că unda se propagă pe toate cele trei direcţii în spaţiu, se
obţine ecuaţia generală a undelor:
01
2
2
2
2
2
2
2
2
=∂
Ψ∂−
∂
Ψ∂+
∂
Ψ∂+
∂
Ψ∂
tuzyx
Sau utilizând operatorul lui Laplace aceasta se scrie:
01
2
2
=∂
Ψ∂−∆Ψ
tu (2.16)

59
2.7.6. Viteza de propagare a undelor. Dispersia undelor
Viteza de propagare a undelor armonice monocromatice plane u coincide cu viteza
de deplasare a fazei şi de aceea se numeşte viteza de fază. Expresia ei se obţine punând
condiţia ca faza să fie constantă şi apoi diferenţiind faza undei. Deoarece faza undei depinde
de variabilele spaţiale şi de timp, trebuie să diferenţiem faza ca o funcţie de două variabile:
constkxt =−=ωα ⇒ 0=−= kdxdtd ωα
de unde viteza de fază este:
uTkdt
dxv f ====
λω
Viteza de fază a undelor armonice monocromatice plane depinde de mediul prin care
acestea se propagă, medii solide, lichide sau gazoase.
Pentru undele longitudinale în solide viteza de fază a acestora este dată de relaţia:
ρE
vs =
iar în lichide: βρ1
=lv (2.17)
În gaze propagarea undelor se consideră a fi un proces adiabatic (fără transfer de energie net
de la undă la mediu) astfel că în relaţia (2.17) pentru gaze trebuie considerat coeficientul de
compresibilitate adiabatic:
ad
ad dp
dV
V
−=
1β
Însă în procese adiabatice constpV =γ , unde Vp CC /=γ este exponentul adiabatic al
gazului. Diferenţiind constpV =γ se obţine:
01 =+ − dVpVdpV γγ γ

60
şi deci: pdp
dV
adγ1
−=
Deci viteza de fază a undelor în gaze este:
µ
γργ
ρβRTp
vad
g ===1
deoarece RTm
pVµ
=
Pentru undele transversale într-o coardă, dacă T este tensiunea (forţa) din coardă şi µ este
masa unităţii de lungime, atunci viteza de fază a undelor este:
µT
vtr =
Iar în medii tridimensionale de densitate ρ şi modul de elasticitate la forfecare G:
µG
vtr =
Însă, unda armonică monocromatică plană este un concept idealizat, în sensul că o undă
sinusoidală, cu o întidere infinită în spaţiu şi timp nu poate purta cu sine nici o informaţie.
Numai semnalele, adică perturbaţiile mărginite în spaţiu şi timp pot purta o informaţie.
Semnalele (undele reale) nu sunt monocromatice, ci prezintă un spectru oarecare de frecvenţe
(mai multe frecvenţe apropiate ca valoare), deoarece orice proces perturbator care este sursa
unei unde are o durată şi o întindere spaţială finită.
O suprapunere de mai multe (infinit de multe) unde armonice monocromatice plane cu
frecvenţe foarte apropiate se numeşte grup de unde sau pachet de unde, iar viteza cu care se
propagă grupul de unde se numeşte viteza de grup, care se identifică cu viteza de deplasare a
maximului central. Se poate demonstra că viteza de grup are expresia:

61
λ
λω
d
dvv
dk
dvkv
dk
kvd
dk
dv f
ff
ff
g −=+===)(
deci: λ
λd
dvvv f
fg −=
numită şi relaţia Rayleigh.
Viteza de grup este viteza cu care se deplasează amplitudinea grupului şi deoarece
intensitatea undei este proporţională cu pătratul amplitudinii, înseamnă că viteza de grup este
viteza de transfer a energiei undei în mediu în care aceasta se propagă.
Se observă că viteza de propagare a undei (viteza de fază fv ) depinde de lungimea de undă: u
= u(λ). Acesta este fenomenul de dispersie a undelor: undele care au lungimi de undă diferite
se propagă în acelaşi mediu cu viteze diferite. Cu alte cuvinte, derivata vitezei de fază fv în
raport cu lungimea de undă λ este diferită de zero. Dacă undele cu lungimi de undă mai lungi
se propagă mai repede decât undele cu lungimi de undă mai scurte, atunci dispersia se
numeşte normală, iar dacă undele cu lungimi de undă mai lungi se propagă mai încet decât
undele cu lungimi de undă mai scurte, atunci dispersia se numeşte anomală.
2.7.7. Unde sferice
În cazul în care suprafeţele de undă sunt sferice, funcţia de undă în coordonate
carteziene ),,,( tzyxΨ , devine în coordonate sferice, doar ),( trΨ , datorită faptului că mediul
fiind omogen şi izotop funcţia de undă nu depinde de coordonatele unghiulare θ şi ϕ . În
acest caz este recomandabil a se exprima laplacianul din ecuaţia (2.16) în coordonate sferice:
( ) 01
2
2
2=
∂
Ψ∂−∆Ψ
tur (2.18)
unde ( )r∆Ψ este componenta laplacianului după rază, adică:

62
( ) ( )Ψ∂
∂=
∂Ψ∂
∂∂
=∆Ψ rrrr
rrrr 2
22
2
11
astfel încât ecuaţia (2.18) devine:
( )Ψ∂
∂r
rr 2
210
12
2
2=
∂
Ψ∂−
tu
sau: ( )Ψ∂
∂r
r 2
2
( ) 01
2
2
2=Ψ
∂
∂− r
tu
notând: ),(),( ' trtrr Ψ=Ψ
ecuaţia devine: ( ) 01
2
'2
2' =
∂
Ψ∂−∆Ψ
tur
care este o ecuaţie diferenţială de acelaşi tip ca şi cea a undelor plane, deci soluţia este:
)sin(),(' krtAtr −=Ψ ω
Revenind la funţia de undă ),( trΨ , solutia ecuaţiei diferenţiale a undelor sferice se scrie:
)sin(1
),( krtAr
tr −=Ψ ω
Se observă că amplitudinea oscilaţiilor în unda sferică scade cu distanţa 1/r faţă de locul în
care se află sursa care generează undele.
2.7.8. Energia undei. Intensitatea undei. Atenuarea undelor
Propagarea undelor elastice într-un mediu determină o mişcare de oscilaţie a
particulelor mediului, deci a fiecărui volum elementar din mediul de propagare al undei, în
jurul poziţiei sale de echilibru. Deci, unda elastică posedă energie mecanică, sub formă de
energie cinetică şi energie potenţială elastică. Într-un interval de timp oarecare dt, fiecare
volum elementar al mediului de propagare al undei elastice suferă şi o deformaţie elastică şi,
datorită propagării undei elastice, îşi modifică energia cinetică cu valoarea cdE , iar energia

63
potenţială cu valoarea pdE . Într-un mediu conservativ, deci care nu are pierderi de energie,
energia mecanică totală primită de mediu este egală cu energia mecanică totală transportată
de undă.
În concluzie, unda elastică transportă energie, iar această energie este transmisă de la sursa
undei către toate punctele mediului în care se propagă unda.
Presupunem un cilindru elementar de suprafaţă S şi înalţime dx într-un câmp de unde plane.
Pentru S şi dx mici, putem considera că toate punctele mediului aflat în acest cilindru
infinitezimal oscilează cu aceeaşi amplitudine. Adică legea de oscilaţie a acestor puncte este:
)sin(),( kxtAtx −= ωψ
Energia oscilatorie din volumul dVdE ρ= este:
pc dEdEdE += (2.19)
unde: )(cos2
1
2
1 2222 kxtAdVdmvdEc −== ωωρ (2.20)
şi: )(sin2
1
2
1 2222 kxtAdVdkdE p −=Ψ= ωωρ (2.21)
aici k este constanta elastică pe care o atribuim mediului din cilindrul de volulm dV, cu
dmdmdk ρωω 22 ==
Înlocuind (2.20) şi (2.21) în (2.19) obţinem:
dVAdE 22
2
1ρω=
Deci densitatea de volum dE/dV a energiei oscilatorii este:
22
2
1A
dV
dEρω= (2.22)

64
În cursul propagării undelor prin aria S este transferată energie. Energia transferată prin
unitatea de suprafaţă, orientată normal pe direcţia propagării undei, în unitatea de timp, se
numeşte intensitatea undei (se măsoară în W/m2):
dV
dEu
Sudt
dEu
dt
dE
SI ===
1,
unde: ==dt
dxu viteza de propagare a undei în acel mediu
Tinând cont de relaţia (2.22) intensitatea undei devine:
uAI 22
2
1ρω=
Dacă unda se propagă printr-un mediu absorbant, atunci are loc absorbţia treptată a energiei
undei de către particulele mediului, iar amplitudinea undei scade după o lege exponenţială:
deAA γ−= 0
unde A0 este amplitudinea undei la distanţa d = 0 iar γ este coeficientul de atenuare.
Cum intensitatea undei este proporţională cu amplitudinea, în cazul unui mediu absorbant
obţinem:
deIdI κ−= 0)(
Care reprezintă legea de atenuare a undelor. Ea permite aflarea expresiei intensităţii undei la
distanţa d de pătrundere în mediul absorbant, iar κ = 2γ este coeficientul de absorbţie al
mediului.
65
2.7.9. Elemente de acustică
Undele elastice cu frecvenţe cuprinse între limitele 16 Hz şi 20 kHz, produc o
senzaţie auditivă şi se numesc unde sonore sau sunete. Acustica se ocupă cu studiul
producerii, propagării şi recepţionării undelor acustice şi cu studiul efectelor produse în urma
interacţiunilor acestora cu mediul prin care se propagă. În funcţie de senzaţia auditivă
produsă, sunetele se deosebesc după înălţime, timbru şi intensitate auditivă (tăria).
Înălţimea este calitatea sunetelor de a fi mai "înalte" (mai "ascuţite") sau mai "joase" (mai
"grave"), după cum frecvenţa lor ν este mai înaltă sau mai joasă.
Timbrul este proprietatea sunetelor prin care pot fi deosebite două sunete de aceeaşi
intensitate şi înălţime, dar produse de surse sonore diferite. Se datorează faptului că
majoritatea sunetelor reprezintă superpoziţii de oscilaţii armonice cu intensităţi diferite şi cu
frecvenţe care sunt multiplii întregi ai unei frecvenţe minime, dar cu intensitatea cea mai
mare, numită frecvenţă fundamentală ν0 sau sunet fundamental. Frecvenţele care sunt
multiplii frecvenţei fundamentale se numesc armonice.
Timbrul sunetelor se datorează prezenţei sau absenţei anumitor armonice din spectrul
sunetelor provenind de la surse sonore diferite cât şi diferenţelor de intensitate a fiecarei
armonice prezente.
Intensitatea auditivă sau tăria este legată de faptul că urechea poate percepe un sunet de o
anumită frecvenţă numai dacă acesta are o intensitate cuprinsă între o valoare minimă, numită
prag de audibilitate (P.A.) şi o intensitate maximă, numită pragul senzaţiei dureroase (P.S.D.)
(fig. 2.5). În afara acestor limite, care depind de frecvenţă, sunetul nu poate fi perceput ca
atare, deoarece este fie prea slab şi nu poate fi perceput, fie pentru prea puternic, producând
senzaţii de durere.
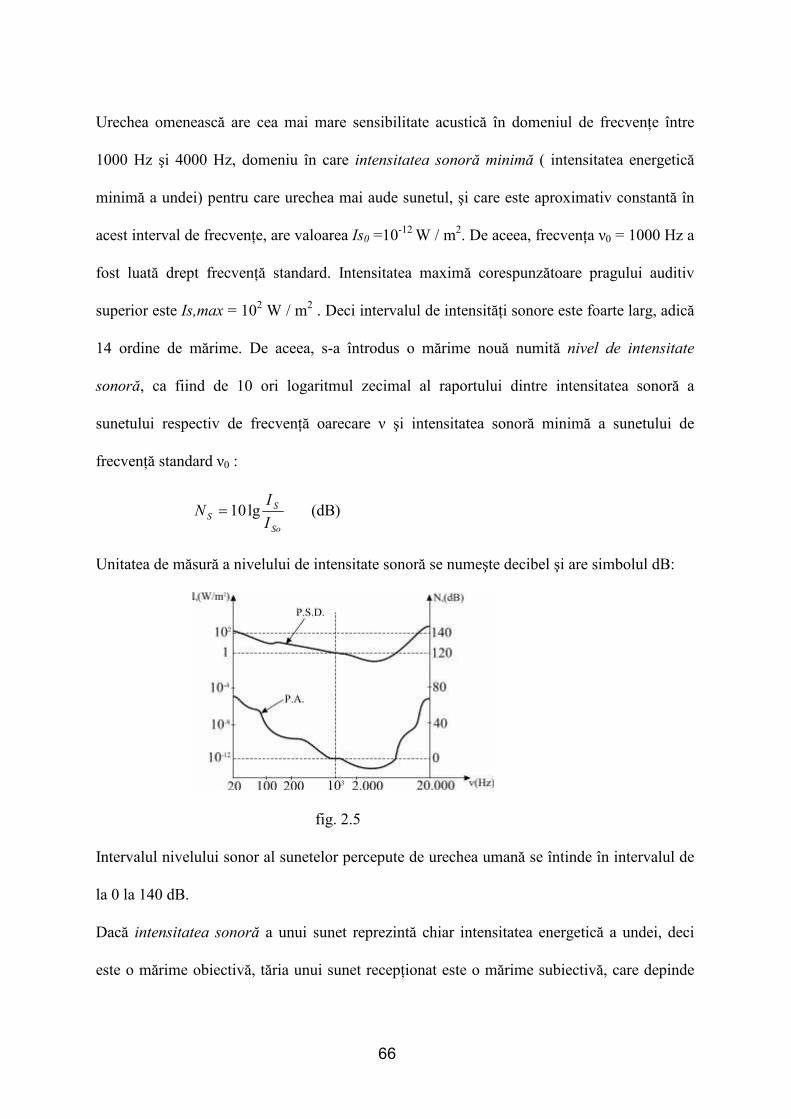
66
Urechea omenească are cea mai mare sensibilitate acustică în domeniul de frecvenţe între
1000 Hz şi 4000 Hz, domeniu în care intensitatea sonoră minimă ( intensitatea energetică
minimă a undei) pentru care urechea mai aude sunetul, şi care este aproximativ constantă în
acest interval de frecvenţe, are valoarea Is0 =10-12 W / m2. De aceea, frecvenţa ν0 = 1000 Hz a
fost luată drept frecvenţă standard. Intensitatea maximă corespunzătoare pragului auditiv
superior este Is,max = 102 W / m2 . Deci intervalul de intensităţi sonore este foarte larg, adică
14 ordine de mărime. De aceea, s-a întrodus o mărime nouă numită nivel de intensitate
sonoră, ca fiind de 10 ori logaritmul zecimal al raportului dintre intensitatea sonoră a
sunetului respectiv de frecvenţă oarecare ν şi intensitatea sonoră minimă a sunetului de
frecvenţă standard ν0 :
So
SS I
IN lg10= (dB)
Unitatea de măsură a nivelului de intensitate sonoră se numeşte decibel şi are simbolul dB:
fig. 2.5
Intervalul nivelului sonor al sunetelor percepute de urechea umană se întinde în intervalul de
la 0 la 140 dB.
Dacă intensitatea sonoră a unui sunet reprezintă chiar intensitatea energetică a undei, deci
este o mărime obiectivă, tăria unui sunet recepţionat este o mărime subiectivă, care depinde

67
de receptorul auditiv şi nu permite o măsurare cantitativă precisă. Totuşi, experimental s-a
constatat că există o legătură între intensitatea sonoră şi senzaţia produsă asupra urechii.
Experimentele au arătat că senzaţia fiziologică (de tărie) produsă de un sunet este
proporţională cu logaritmul intensităţii sonore (legea Weber-Fechner). Cu alte cuvinte, dacă
intensitatea sonoră creşte de 100 de ori, senzaţia auditivă (tăria sunetului) creşte abia cu 2
unităţi.
Datorită diferenţelor cu care sunt percepute diferite sunete de către ureche, în sensul că
asupra urechii ele produc senzaţii diferite, se impune ordonarea sunetelor după senzaţia pe
care acestea o produc. Pentru aceasta, se impune introducerea unei mărimi noi, numită
intensitate auditivă (Ia).
Prin definiţie, intensitatea auditivă Ia a unui sunet de frecvenţă ν este egală cu intensitatea
sonoră Is a sunetului standard de referinţă, de frecvenţă ν0 = 1000 Hz (pentru care urechea are
maximum de sensibilitate), care produce aceeaşi senzaţie auditivă ca şi sunetul dat. Din
această definiţie a intensităţii auditive rezultă evident că intensitatea auditivă a unui sunet de
frecvenţă 1000 Hz are aceeaşi valoare cu intensitatea sonoră a sa.
Se poate defini nivelul intensităţii auditive, ca fiind egal cu de 10 ori logaritmul raportului
dintre intensitatea auditivă a sunetului de studiat şi intensitatea auditivă minimă ( 0Ia ) care se
acceptă că este aceeaşi cu intensitatea sonoră minimă a sunetului de frecvenţă standard
ν0=1000 Hz (Is0):
0
lg10Ia
IaNa = (fon)

68
2.7.10. Ultrasunetele şi aplicaţiile lor
Ultrasunetele sunt unde elastice a căror frecvenţă este mai mare decât 20 kHz, limita
aceasta, desigur, nu trebuie înţeleasă în mod strict, frecvenţele maxime atinse în prezent fiind
de ordinul a 2 · 109 Hz (adică 2 GHz). Generarea ultrasunetelor se realizează prin două
metode electroacustice principale, bazate pe două fenomene: efectul piezoelectric invers şi
efectul magnetostrictiv. Efectul piezoelectric direct constă în următoarele: dacă o plăcuţă
cristalină (cuarţ sau titanat de bariu), tăiată în mod convenabil, de-a lungul anumitor axe, este
supusă unei comprimări mecanice, plăcuţa se polarizează, adică pe feţele ei apar sarcini
electrice de semn opus.
Efectul piezoelectric invers constă în aplicarea pe feţele plăcuţei cristaline a unui câmp
electric alternativ, drept rezultat, plăcuţa va suferi deformaţii mecanice (se va alungi sau
comprima) în ritmul frecvenţei câmpului electric. Aceste deformaţii mecanice se vor
transmite în mediul ambiant sub formă de unde ultrasonore. Dacă plăcuţa are grosimea d, în
ea se vor induce unde mecanice staţionare, la capetele plăcuţei fiind situate nodurile undei.
Pentru unda cu frecvenţa fundamentală, condiţia este ca grosimea plăcuţei să fie egală cu o
semilungime de undă. Ţinând cont de expresia vitezei undelor în medii solide, frecvenţa
ultrasunetului generat este:
ρν
λ Ed
2
1
2== ⇒
ρν
E
d2
1=
Efectul magnetostrictiv constă în proprietatea corpurilor feromagnetice (de exemplu, o bară
de nichel) de a se deforma mecanic (comprima sau dilata) atunci când sunt supuse acţiunii
unui camp magnetic alternativ. Deformaţiile mecanice ale barei se transmit în mediul
ambiant sub formă de unde ultrasonore, frecvenţa acestora calculându-se cu o formulă
similară celei de mai sus.

69
Aplicaţiile ultrasunetelor se bazează în principal pe trei proprietăţi remarcabile ale acestora.
- Deoarece au frecvenţe foarte mari, undele ultrasonore transportă energii considerabile.
- Având frecvenţe foarte mari şi, deci, lungimi de undă foarte mici, fenomenul de difracţie
este foarte puţin prezent pentru obstacolele obişnuite şi, în consecinţă, undele ultrasonore pot
fi emise şi recepţionate pe direcţii riguros determinate.
- Frecvenţa lor fiind în afara domeniului de audibilitate, undele ultrasonore nu se aud, deci
funcţionarea aparatelor cu ultrasunete nu este deranjantă.
Din punct de vedere al interacţiunii ultrasunetelor cu mediul ambiant, aplicaţiile
ultrasunetelor se împart în două categorii: aplicaţii pasive, în care ultrasunetele nu modifică
structura şi proprietăţile mediului prin care se propagă, ci servesc numai la obţinerea de
informaţii referitoare la calitatea sau dimensiunile corpului examinat, precum şi aplicaţii
active, în care ultrasunetele, interacţionând cu mediul de propagare, îi modifică acestuia atât
structura, cât şi proprietăţile.
Aplicaţiile pasive cele mai importante ale ultrasunetelor sunt următoarele: defectoscopia
ultrasonoră, microscopia ultrasonoră, hidrolocaţia ultrasonoră, comunicaţia între submarine,
sonicitatea etc.
Aplicaţiile active cele mai importante ale ultrasunetelor sunt următoarele: cavitaţia,
prelucrarea materialelor solide (şlefuire, tăiere, perforare), schimbarea structurii metalelor
(prin micşorarea granulaţiei acestora), obţinerea de aliaje a unor metale nemiscibile, lipirea şi
cositorirea ultrasonoră, distrugerea bacteriilor şi microorganismelor, modificarea unor funcţii
biologice, etc.

70
Capitolul 3: Teoria relativităţii
Studiul mişcării unui sistem fizic se face în raport cu un referenţial. Prin referenţial
se înţelege un ansamblu rigid de corpuri şi un ceasornic solidar cu acesta. Faţă de acest
referenţial un sistem fizic poate fi în repaus relativ sau în mişcare relativă.
Raportând mişcarea unui sistem la diferite referenţiale, legile mişcării stabilite în
raport cu fiecare din ele vor fi diferite, ceea ce arată că nu toate referenţialele sunt la fel de
adecvate pentru stabilirea legilor de mişcare. Vom studia în continuare doar mişcarea
sistemelor fizice faţă de referenţiale inerţiale, adică faţă de acele referenţiale care se mişcă
unele faţă de altele rectiliniu şi uniform.
Fie un referenţial (R) format dintr-un sistem cartezian ortogonal de trei axe şi un
ceasornic, referenţial în raport cu care la momentul t poziţia unui punct este determinată de
coordonatele x, y, z. În raport cu un alt referenţial (R’) acelaşi eveniment este caracterizat
prin ansamblul (x’, y’, z’, t’). Relaţiile care exprimă variabilile x’, y’, z’, t’ ca funcţii de x,
y, z, t se numesc relaţii de transformare (grup de transformări), iar cu stabilirea acestor
relaţii se ocupă teoria relativităţii.
3.1. Relativitatea clasică
Pe baza observaţiilor experimentale privind mişcarea corpurilor macroscopice cu
viteză mică faţă de viteza luminii în vid s-a stabilit grupul de transformări, valabil în
mecanica clasică, numit grupul de transformări Galilei. Observaţiile au impus ipoteza că
interacţiunile dintre corpuri se exercită instantaneu la distanţă, ceea ce înseamnă că
semnalele se transmit cu viteză infinită. Această ipoteză face posibilă sincronizarea tuturor
ceasornicelor, avînd drept consecinţă faptul că ceasornice sincrone măsoară aceeaşi durată
în sisteme de referinţă diferite:

71
'tt ∆=∆ → t – t 0 = t’ – t’0
Considerând t 0 = t’0 = 0, rezultă:
t = t’ (3.1)
Astfel, timpul, acelaşi în toate sistemele de referinţă inerţiale (timp universal)
implică simultaneitatea absolută a două evenimente, adică evenimente simultane într-un
referenţial sunt simultane în orice alt referenţial.
Fie (R) şi (R’) două referenţiale, având originile O şi respectiv O’, aflate în mişcare
relativă cu viteza Vr
unul în raport cu celălalt. Spaţiul fiind euclidian, între vectorii de
poziţie ai unui punct oarecare P în raport cu cele două referenţiale există relaţia:
0' rtVrrrrrr
++= (3.2)
unde 0rr
este vectorul de poziţie al originii O’ la t 0 = t’0 = 0.
Relaţiile (3.1) şi (3.2) constituie grupul de transformări Galilei. În coordonate
carteziene acest grup de transformări capătă forma:
x = x’ + Vxt’ + x0
y = y’ + Vyt’ + y0
z = z’ + Vzt’ + z0
t = t’
Din examinarea acestor relaţii se observă că transformarea Galilei este liniară
(variabilele sunt la puterea întâi, ceea ce înseamnă că la un eveniment în (R) corespunde un
singur eveniment în (R’)), reciprocă (se exprimă la fel x’, y’, z’, t’ în funcţie de x, y, z, t,
modificând doar semnul vitezei), şi asimetrică (coordonatele spaţiale nu se modifică la fel
cu coordonata temporală).
Vom analiza câteva consecinţe ale grupului de transformări Galilei:

72
1. Invarianţa distanţelor. Fie 1rr
şi 2rr
vectorii de poziţie în raport cu (R) ai punctelor P1
şi P2, şi '1rr
şi '2rr
vectorii de poziţie ai aceloraşi puncte în raport cu (R’), vectori consideraţi
la t1= t2. Utilizând relaţia (3.2), distanţa dintre cele două puncte este:
'rrrr
∆=∆
de unde rezultă că distanţa este invariantă în raport cu transformarea Galilei, adică este
aceeaşi în raport cu orice referenţial inerţial.
2. Legea de compunere a vitezelor. Derivând relaţia (3.2) în raport cu timpul şi ţinând
seama că constV =r
se obţine:
V'vvrrr
+= (3.3)
unde vr
este viteza în raport cu (R) iar 'vr
viteza în raport cu (R’)
3. Invarianţa acceleraţiilor. Derivând relaţia (3.3) în raport cu timpul şi deoarece
constV =r
, se obţine:
'aarr
= (3.4)
4. Principiul relativităţii clasice. Pentru mişcări ale corpurilor macroscopice cu viteze
mici în raport cu viteza luminii masa corpurilor este constantă. Ţinând cont de relaţia (3.4)
rezultă:
'FFrr
=
Pe de altă parte, principiul al doilea al mecanicii newtoniene impune:
2
2
dt
rdmF
rr= şi
2
2
dt
'rdm'F
rr= (3.5)
Întrucât 'FFrr
= , integrând ecuaţiile (3.5) se obţine aceeaşi formă a dependenţei
lui rr
şi 'rr
. Cu alte cuvinte, legile mecanicii clasice sunt invariante în raport cu grupul

73
de transformări Galilei şi acest lucru constituie tocmai principiul relativităţii clasice.
Altfel spus, legile mecanicii clasice trebuie astfel formulate încât să-şi păstreze forma la
trecerea de la un referenţial la altul, iar transformarea care asigură această invarianţă este
transformarea Galilei.
3.2. Teoria relativităţii restrânse (speciale)
Teoria relativităţii restrânse a fost creată în esenţă de Albert Einstein în 1905.
În 1863 J. C. Maxwell a formulat legile electromagnetismului şi a dat teoria
electromagnetică a luminii. Ecuaţiile lui Maxwell nu sunt invariante la transformările
Galilei, deci legile fenomenelor electromagnetice şi optice ar trebui să difere de la un
referenţial inerţial la altul. Or, aceasta ar permite determinarea mişcării relative a
referenţialelor inerţiale şi evidenţierea unui referenţial absolut, presupus legat de eterul
cosmic, universal. Ceea ce n-a permis mecanica, ar permite optica. Dar, nenumăratele
experienţe optice, de exemplu experienţele lui Michelson şi Morley de la sfârşitul secolului
nouăsprezece, au arătat că nici prin mijloace optice nu se poate determina mişcarea unui
referenţial inerţial. Astfel, s-a găsit că viteza luminii în vid este independentă de mişcarea
inerţială a sursei sau a observatorului, deci este aceeaşi faţă de diferite referenţiale. Acest
lucru contrazice legea clasică de compunere a vitezelor (3.3), deci şi grupul de transformări
Galilei.
Contradicţia ivită a fost rezolvată clar şi precis în 1905 de către Albert Einstein prin
crearea teoriei relativităţii. Pe baza rezultatelor experimentale Einstein extinde principul
relativităţii clasice al lui Galilei la întreaga fizică, şi îl completează cu un alt principiu
privind invarianţa vitezei maxime de interacţiune.

74
3.2.1. Principiile relativităţii restrânse
La baza teoriei relativităţii restrânse stau următoarele principii:
a) Principiul relativităţii restrânse (einsteiniene): Toate sistemele de referinţă inerţiale
sunt echivalente pentru toate legile fizicii. Acest lucru înseamnă că echivalenţa
referenţialelor inerţiale nu este un principiu de relativitate propriu mecanicii, ci este un
principiu de relativitate universal pentru toată fizica. Prin urmare, referenţialele fiind
echivalente, înseamnă că forma legilor fizicii nu se modifică la trecerea de la un referenţial
inerţial la altul, iar grupul de transformări care asigură această invarianţă este grupul
Lorentz. Principiul relativităţii einsteiniene indică echivalenţa tuturor sistemelor de
referinţă inerţiale, în sensul că, nici o experienţă de fizică efectuată în interiorul unui
referenţial inerţial nu poate să pună în evidenţă mişcarea acestui sistem în raport cu un alt
sistem de referinţă inerţial.
b) Principiul invarianţei vitezei maxime de interacţiune: Viteza maximă de propagare a
interacţiunilor – egală cu viteza luminii în vid – este invariantă în raport cu orice
referenţial inerţial şi cu orice direcţie de propagare. Acest principiu impune afirmaţia că
viteza luminii are aceeaşi valoare în raport cu orice referenţial inerţial, în contradicţie cu
legea compunerii vitezelor în mecanica clasică. Pe de altă parte acest principiu subliniază
caracterul propagării din aproape în aproape a interacţiunilor, înlăturând definitiv ipoteza
propagării instantanee a interacţiunilor la distanţă.
c) Principiul de corespondenţă se adaugă celor anterioare şi face legătura dintre fizica
clasică şi cea relativistă: Legile fizice deduse pe baza primelor două principii ale
relativităţii restrânse trebuie astfel formulate încât pentru viteze relativ mici (v/c →0) să
cuprindă drept cazuri particulare legile fizicii clasice. În consecinţă legile clasice nu sunt

75
înlocuite, ci li se precizează domeniul mai restrîns de valabilitate (sunt valabile la viteze
mici în raport cu viteza luminii în vid).
3.2.2. Grupul de transformări Lorentz
Ne propunem să deducem mai jos grupul de transformări care să satisfacă
principiile relativităţii restrânse.
Fie referenţialele (R) şi (R’) în mişcare cu viteza Vr
astfel încât Ox≡O’x’,
Oy II O’y’ şi Oz II O’z’ (fig.3.1).
Fie P un eveniment de
coordonate x’, y’, z’, t’ în raport cu
(R’) şi de coordonate x, y, z, t, în
raport cu (R). Din modul particular
în care am ales referenţialele, cu y ≡
y’ şi z ≡ z’, rezultă:
x’ = x’(x,t) ; t’ = t’(x,t)
Noile transformări trebuie să fie liniare, la fel ca şi transformările Galilei. De
asemenea, noile transformări trebuie practic să coincidă cu transformările Galilei pentru
valori mici ale vitezei relative Vr
. În aceste condiţii pentru coordonatele x’ şi x trebuie să
avem:
x’ = α (x - Vt) (3.6)
unde α nu depinde de coordonate, ci eventual de viteza relativă V a celor două sisteme.
Relaţia (3.6) trebuie să fie liniară iar pentru punctele x = Vt din planul O’y’z’
trebuie să rezulte x’ = 0 în (R’), deci polinomul liniar al lui x’ trebuie să fie divizibil cu x –
Vt, adică să fie proporţional cu x – Vt.
y y’
z z’
x≡x’ O O’
•P
Vr
fig. 3.1

76
Analog trebuie să avem:
x = α (x’ + Vt’) (3.7)
deoarece pentru punctele x’ = -Vt’ din planul Oxy trebuie să rezulte x = 0 în (R), deci
polinomul lui x trebuie să fie proporţional cu x’ + Vt’.
Coeficientul α trebuie să fie acelaşi în virtutea echivalenţei referenţialelor, altfel
trecerea de la un sistem de referinţă la altul ar fi diferită, în contradicţie cu principiul
relativităţii restrânse. Putem considera că (R) se mişcă cu –V faţă de (R’), atunci
coordonatele din (R) vor fi considerate cu accent, iar cele din (R’) fără accent, deci trecerea
inversă se obţine din cea directă prin substituţia (x,t,V) ⇔ (x’,t’,-V):
x’ = α (x - Vt) ⇔ x = α (x’ + Vt’)
(în cazul transformărilor Galilei α = 1).
Să presupunem acum că în momentul iniţial, când originile O şi O’ coincid, se
emite un semnal luminos din origine în sensul axei comune Ox. Un punct oarecare în care
ajunge semnalul are coordonata x = ct în (R) şi x’ = ct’ în (R’), cu aceeaşi viteză c a luminii
(am ţinut cont de al doilea principiu al teoriei relativităţii restrânse). Aplicând
transformările (3.6) şi (3.7) pentru punctul în care ajunge semnalul luminos, obţinem:
ct’ = α (c – V)t, ct = α (c+V)t’,
de unde, înmulţindu-se membru cu membru se obţine:
22 /1
1
cV−=α
deci: 22 /1
'cV
Vtxx
−
−= şi
22 /1
''
cV
Vtxx
−
+=
Introducând prima relaţie în a doua, sau invers, obţinem formulele pentru
transformarea timpului:

77
22
2
/1
/'
cV
cVxtt
−
−= şi
22
2
/1
/''
cV
cVxtt
−
+=
Reunind rezultatele, obţinem grupul de transformări Lorentz, care dă trecerea de
la un referenţial inerţial, la altul care se mişcă faţă de primul cu viteza constantă V, de-a
lungul axei comune Ox:
22 /1
'cV
Vtxx
−
−= ,
22 /1
''
cV
Vtxx
−
+=
y’ = y, z’ = z, y = y’, z = z’
22
2
/1
/'
cV
cVxtt
−
−= ,
22
2
/1
/''
cV
cVxtt
−
+=
Grupul de transformări Galilei se obţine ca un caz limită al grupului de transformări
Lorentz, considerând 0/ →cV .
Încă înainte ca Einstein să enunţe principiul relativităţii, Lorentz a observat faptul că
acest grup lasă invariantă ecuaţia undelor electromagnetice, şi deci ecuaţiile lui Maxwell, la
trecerea de la un referenţial inerţial la altul. Einstein, urmând o sugestie a lui H. Pointcaré, a
propus ca toate legile fizice să fie astfel formulate încât să rămână invariante la
transformarea Lorentz.
Grupul de transformări Lorentz satisface toate cele trei principii ale teoriei
relativităţii restrânse.
3.2.3. Consecinţe cinematice ale grupului de transformări
Lorentz
Numim sistem de referinţă propriu sistemul în raport cu care un sistem fizic
oarecare se află în repaus, iar mărimilor care caractrizează sistemul fizic în raport cu acest

78
referenţial li se atribuie cuvântul propriu. De exemplu, distanţa dintre două puncte a
sistemului fizic se numeşte distanţă proprie, volumul sistemului se numeşte volum
propriu, iar durata dintre două evenimente care au loc în acelaşi punct al sistemului (în
repaus faţă de referenţialul ales) se numeşte durată proprie.
3.2.3.1. Contracţia lungimilor
Fie (R) şi (R’) două referenţiale inerţiale în mişcare relativă cu viteza Vr
orientată
pe direcţia Ox, aceeaşi cu O’x’.
Fie P1P2 un segment de
dreaptă care pentru simplificarea
calculelor îl considerăm paralel cu
axa Ox, segment în repaus în raport
cu (R’).
Pentru observatorul din (R’) distanţa
dintre cele două puncte este:
12 'x'x'x −=∆
Obsevatorul legat de (R) reperează simultan (t1 = t2 = t) abscisele celor două puncte,
găsind:
12 xxx −=∆
Din reperarea simultană în (R) şi utilizând transformarea coordonatei x din grupul
de transformări Lorentz, rezultă:
22
12
22
1
22
212 c/V1)'x'x()Vtc/V1'x()Vtc/V1'x(xxx −−=+−−+−=−=∆
deci:
y y’
z z’
x≡x’ O O’
P 1 P 2
•• ..................
Vr
fig. 3.2

79
22 /1' cVxx −∆=∆ (3.8)
Relaţia (3.8) arată că lungimea corpurilor pe direcţia mişcării se contractă.
Distanţa dintre două puncte fixate este maximă în raport cu sistemul propriu de referinţă;
în raport cu orice alt sistem, în mişcare faţă de sistemul propriu, distanţa este mai mică.
Doar dimensiunea sistemului fizic pe direcţia mişcării (x) este modificată faţă de
diferite referenţiale, dimensiunile transversale pe direcţia mişcării ramânând aceleaşi (y =
y’, z = z’), de aceea volumul sistemului fizic apare contractat faţă de volumul propriu în
acelaşi raport ca şi dimensiunea x:
22 /1' cVdVdV −=
De exemplu, un corp sferic în referenţialul propriu apare turtit în direcţia mişcării
într-un alt referenţial inerţial, faţă de care corpul se mişcă cu viteza Vr
.
3.2.3.2. Dilatarea duratelor
Să considerăm că în raport cu (R’) la momentele 1't şi 2't în P1 şi respectiv în P2
(fig. 3.2) au loc două evenimente.
Durata dintre evenimente în raport cu (R’) este:
12 't't't −=∆
În raport cu (R) durata dintre evenimente este:
22
2
22
2
11
22
2
22
12
c/V1
c/'xV't
c/V1
c/'Vx't
c/V1
c/'Vx'tttt
−
+=
−
+−
−
+=−=
∆∆∆
Relaţia arată că, în general, duratele în raport cu cele două referenţiale sunt diferite.
Discuţia acestei relaţii se poate face în cateva cazuri particulare:
80
a) 0'=∆t şi 0'≠∆x : evenimente simultane în (R’) dar care au loc în puncte diferite. În
acest caz, în raport cu (R) durata dintre evenimente este:
22
2
/1
/'
cV
cxVt
−
∆=∆
Prin urmare, evenimentele simultane în (R’) dar care au loc în puncte diferite nu mai sunt
simultane în nici un alt referenţial aflat în mişcare faţă de (R’), ceea ce înseamnă că
simultaneitatea este relativă la un anumit referenţial.
b) 0'≠∆t şi 0'=∆x : evenimente în acelaşi punct faţă de (R’) dar la momente diferite. În
acest caz (R’) este referenţial propriu, iar 't∆ este durată proprie.
În raport cu (R) durata dintre evenimente este:
22 /1
'
cV
tt
−
∆=∆
rezultat cunoscut sub numele de dilatarea duratelor (deoarece t∆ > 't∆ ): durata proprie
dintre două evenimente este minimă în raport cu durata dintre aceleaşi evenimente
măsurată din oricare alt referenţial inerţial.
3.2.3.3. Compunerea relativistă a vitezelor
Ne vom referi la acelaşi caz particular al celor două referenţiale în mişcare relativă
cu viteza Vr
după axa Ox≡O’x’ pentru care trecerea de la (R’) la (R) se face cu grupul de
trasformări Lorentz:
22 /1
''
cV
Vtxx
−
+=
y = y’
z = z’
81
22
2
/1
/''
cV
cVxtt
−
+=
Proiecţiile vitezei mişcării pe cele trei axe de coordonate în raport cu (R) sunt:
xv = dt
dx yv =
dt
dy zv =
dt
dz (3.9)
iar în raport cu (R’):
'xv =
'dt
'dx '
yv = 'dt
'dy '
zv = 'dt
'dz (3.10)
Diferenţiind grupul Lorentz, făcând rapoartele cerute de relaţia (3.9) şi ţinând seama de
(3.10) se obţine:
x2
x
x
'vc
V1
V'vv
+
+=
x2
22
y
y
'vc
V1
c/V1'vv
+
−=
x2
22
z
z
'vc
V1
c/V1'vv
+
−=
Se obsevă că relaţia relativistă de compunere a vitezelor diferă de relaţia clasică
dedusă cu ajutorul transformării Galilei.
Trecerea de la (R) la (R’) se poate obţine făcând xx 'vv ⇔ şi VV −⇔ :
x2
x
x
vc
V1
Vv'v
−
−=
x2
22
y
y
vc
V1
c/V1v'v
−
−=
82
x2
22
z
z
vc
V1
c/V1v'v
−
−=
Formulele de compunere relativistă a vitezelor satisfac principiul de corespondenţă,
în sensul că pentru 0/ →cV acestea devin formulele clasice de compunere a vitezelor.
Presupunând o mişcare după axa Ox≡O’x’ astfel încât c'v x = şi V c= , se obţine:
c
cc
c
ccvx =
+
+=
21
ceea ce înseamnă că formulele de compunere a vitezelor satisfac principiul vitezei maxime
de propagare a interacţiunilor (invarianţa vitezei luminii la modificarea referenţialelor).
3.2.3.4. Universul cvadridimensional
În anul 1908, matematicianul Minkowski introduce noţiunea de spaţiu
cvadridimensional (în prezent numit şi spaţiul Minkowski) în care, în afara celor trei
coordonate spaţiale:
x1 = x, x2 = y, x3 = z
se introduce a patra coordonată:
x4 = ict
În acest spaţiu intervalul s2 dintre două evenimente se scrie sub forma:
s2 = 22222 )t(c)z()y()x( ∆∆∆∆ −++
Cu alte cuvinte, intervalul s reprezintă distanţa dintre două puncte în spaţiul
cvadridimensional. Mărimea s2 este invariantă faţă de grupul de transformări Lorentz, la fel
cum în fizica clasică faţă de grupul de tansformări Galilei este invariantă mărimea:
83
222 )()()( zyx ∆+∆+∆
adică, distanţa între două puncte în spaţiul tridimensional.
Invarianţa intervalului s2 arată legătura indestructibilă dintre spaţiu şi timp. Teoria
relativităţii restrânse scoate în evidenţă faptul că spaţiul şi timpul, ca forme de existenţă a
materiei, nu pot fi izolate unul de altul. Prin izolarea noţiunilor de spaţiu şi timp se ajunge
la spaţiul absolut şi timpul absolut, care sunt noţiuni aproximative şi valabile doar pentru
viteze relative mult mai mici decât viteza luminii în vid.
În spaţiul Minkowski dimensiunile spaţiale x, y, z sunt reale iar dimensiunea ict
este imaginară. Prin urmare în acest univers, fiecărui eveniment i se atribuie patru
coordonate (x,y,z,ict), iar evoluţia unui sistem fizic descrie o traiectorie numită linie de
univers. Dacă intervalul s2 dintre două evenimente din acest univers este pozitiv (s2>0)
atunci evenimentele sunt separate printr-un interval de tip spaţial. Două evenimente
separate print-un interval de tip spaţial sunt absolut separate spaţial sau absolut
independente şi nu pot fi legate cauzal între ele, deoarece nici un semnal nu le poate uni,
viteza necesară fiind mai mare decât viteza luminii în vid. Dacă s2 < 0 atunci evenimentele
sunt separate printr-un interval de tip temporal. Două evenimente separate printr-un
interval de tip temporal sunt absolut separate temporal sau în succesiune temporală
absolută şi pot fi legate cauzal între ele. În sfârsit există cazul în care intervalul s2 = 0. În
acest caz cele două evenimente sunt legate prin propagarea luminii.

84
3.2.4. Elemente de dinamică relativistă
În dinamica relativistă rămâne valabilă afirmaţia că derivata impulsului în raport cu
timpul este egală cu forţa care acţionează asupra punctului material. De asemenea, sunt
valabile principiile de conservare ale impulsului şi energiei pentru sisteme izolate.
3.2.4.1. Dependenţa masei de viteză
Pentru a obţine dependenţa masei de viteza corpului, ne vom baza pe formulele
relativiste de compunere a vitezelor şi pe legea conservării impulsului.
Ne imaginăm o ciocnire neelastică a două corpuri. Masa corpurilor este aceeaşi m0
când corpurile se află în repus fată de (R) (fig. 3.3). În referenţialul (R’) corpurile se
deplasează, unul spre celălalt cu vitezele 'v (paralele cu axa O’x’), iar după ciocnire rămân
în repaus faţă de (R’).
Referenţialul (R’) se
deplasează cu viteza 'v faţă de (R)
pe axa Ox ≡ O’x’. Evident că după
ciocnire cele două corpuri se vor
deplasa cu viteza 'v faţă de (R).
În procesul ciocnirii masa:
m = m1 + m2
se conservă.
Pentru obsevatorul din (R) legea conservării impulsului se scrie sub forma:
'v)mm(vm 2111 +=
unde:
y y’
z z’
x≡x’ O O’
• • m1 m2
'vr
fig. 3.3
'vr 'v
r

85
22221
/'1
'2
/'1
''
cv
v
cv
vvv
+=
+
+= (3.11)
deci: ')(/'1
'221221 vmm
cv
vm +=
+
de unde: 2221 )1/'1
2( m
cvm =−
+ (3.12)
În referenţialul aflat în repaus masa celor două corpuri este aceeaşi 0m . Corpul cu
masa 2m se află în repaus faţă de (R) deoarece viteza sa faţă de acest sistem este:
0/'1
''222 =
−
+−=
cv
vvv
Deci relaţia (3.12) devine:
0221 )1/'1
2( m
cvm =−
+
din care rezultă pentru 0m :
22
22
10/'1
/'1
cv
cvmm
+
−=
Utilizând relaţia (3.11) putem scrie egalitatea:
2
22
22
222
2
22
21
/'1
/'1
)/'1(
'4111
+
−=
+⋅−=−
cv
cv
cv
v
cc
v
deci: 22110 /1 cvmm −= sau
221
01
/1 cv
mm
−=
În cazul în care un corp cu masa de repaus 0m se deplasează cu viteza v, relaţia de
mai sus devine:
22
0
/1 cv
mm
−=

86
Această relaţie reprezintă tocmai dependenţa masei de viteză. Masa 0m
reprezintă masa de repaus, iar m reprezintă masa faţă de referenţialul în raport cu care
particula (corpul, sistemul fizic) se deplasează cu viteza v, şi se numeşte masă de
mişcare.
Se observă că dacă v creşte, masa corpului creşte, acesta fiind un efect relativist.
Pentru viteze v mult mai mici decât viteza luminii în vid c, masa de mişcare se poate
aproxima cu masa de rerpaus: 0mm ≅ . Acest rezultat reprezintă chiar aproximaţia
mecanicii clasice care afirmă că la viteze mult mai mici decât viteza luminii în vid masa
corpurilor rămâne constantă.
Putem scrie de asemenea impulsul corpului cu masa de repaus 0m aflat în mişcare
cu viteza v faţă de referenţialul (R):
22
0
/1 cv
vmvmp
−==
rrr
Cum am mai precizat la începutul acestui capitol în dinamica relativistă rămâne
valabilă afirmaţia că derivata impulsului în raport cu timpul este egală cu forţa care
acţionează asupra corpului, astfel încât:
amdt
dmv
dt
vdm
dt
dmvvm
dt
d
dt
rrr
rrr
r+=+=== )(
însă această relaţie diferă de cea clasică prin faptul că 0≠dt
dm. Se remarcă de asemenea că
spre deosebire de mecanica clasică în mecanica relativistă forţa şi acceleraţia nu mai sunt
coliniare.

87
3.2.4.2. Relaţia dintre masă şi energie
Fie un corp cu masa proprie m0 supus acţiunii forţei Fr
. Presupunând corpul iniţial
în repaus, forţa îl deplasează pe direcţia şi în sensul ei modificându-i starea de mişcare.
Lucrul mecanic efectuat de forţă pe distanţa elementară rdr
este:
mvdvdmv
vmddmvvvmdvpddt
rdrd
dt
pdrdFdL
+=
=+====⋅=
2
)()(rrrrrr
rr
rrr
Din relaţia de dependenţă a masei de viteză:
22
0
/1 cv
mm
−=
prin diferenţiere şi efectuarea calculelor rezultă:
22 vc
mvdvdm
−=
astfel încât:
dmcdmvcdmvdL 2222 )( =−+=
Potrivit teoremei de variaţie a energiei cinetice:
dL = dEc
Pentru situaţia considerată, energia cinetică iniţială este nulă. Fie Ec energia cinetică a
corpului în momentul în care corpul are viteza v, şi deci masa m.
Integrând dEc = c2dm între limitele considerate:
∫∫ =m
m
E
c dmcdEc
0
2
0
se obţine:
Ec = mc2 – m0c2
Deci energia cinetică a corpului apare ca diferenţă a doi termeni.

88
Termenul
E0 = m0c2
este numit energie de repaus, iar
E = m0c2 + Ec = mc2
este energia totală a corpului (corespunzătoare masei de mişcare m ).
Relaţia:
E = mc2
are valabilitate generală în sensul că orice sistem fizic de masă m are energia E = mc2 şi
reprezintă cunoscuta formulă a lui Einstein care a stat la baza dezvoltării fizicii nucleare.
Această relaţie ne precizează că legea de conservare a energiei este şi lege de conservare a
masei. Deci variaţia de energie a unui punct material sau a unui sistem de puncte materiale
implică o variaţie de masă potrivit relaţiei:
mcE ∆=∆ 2
În cadrul fizicii nucleare întâlnim fenomenul de transformare a masei în energie
(fisiunea nucleară, anhilarea electron - pozitron), cât şi fenomenul invers, de transformare a
energiei în masă (generarea de perechi electron – pozitron).
În cazul vitezelor mici, energia cinetică dată de diferenţa celor doi termeni:
Ec = mc2 – m0c2
devine: Ec = m0c2(1 + ......)
8
3
2
14
4
2
2
++c
v
c
v - m0c
2 ≅2
1m0v
2
adică se obţine în prima aproximaţie expresia clasică a energiei cinetice.

89
3.2.4.3. Relaţia dintre energie şi impuls
Considerăm un sistem cu masa de repaus m0, în mişcare cu viteza v în raport cu
(R). În raport cu acest referenţial impulsul sistemului şi energia lui totală sunt:
p = mv
E = m c2
unde:
2
2
0
1c
v
mm
−
= (3.13)
Împărţind primele două relaţii, viteza se poate scrie:
v = E
pc 2
Înlocuind această ultimă relaţie şi m = E/c2 în relaţia (3.13), după ridicarea la pătrat
se obţine:
202
22
4
2
)1( mE
cp
c
E=−
sau: 420
222 cmcpE +=
adică tocmai relaţia dintre energia totală E şi impulsul p ale sistemului:
220
2 cmpcE +±=
Utilizând expresia energiei de repaus E0 = m0c2, relaţia precedentă se poate scrie:
2
00
1
+±=
E
pc
E
E
Dependenţa E/E0 = f(pc/E0)
este arătată în figura alăturată, în
abscisă fiind pc/E0, iar în ordonată
E/E0.
pc/E0
E/E0
1
-1
I
II

90
Această dependenţă are două ramuri.
- ramura superioară (I) :
2
00
1
++=
E
pc
E
E
care arată că pe măsură ce creşte impulsul, creşte şi energia.
- ramura inferioară (II) :
2
00
1
+−=
E
pc
E
E
care corespunde valorilor negative ale energiei totale; potrivit acestei ramuri, pe măsură ce
creşte impulsul sistemului energia sa totală scade. Acest rezultat a fost ignorat de fizica
clasică, considerându-se că nu există sisteme în aceste stări. Dirac a presupus că astfel de
sisteme există, şi deoarece energia totală a sistemului este negativă, înseamnă că aceste
sisteme sunt în stări “legate”, pe când sistemele cu energia totală pozitivă se află în stări
“libere”. Este evident că pentru a trece un sistem din starea “legată” în starea “liberă” la
aceeaşi valoare a impulsului trebuie să i se transfere o energie egală cu diferenţa energiilor
celor două stări:
2
00 12
+=∆
E
pcEE
cu 02min
EE =∆
Acest lucru a fost pus în evidenţă experimental în fizica nucleară. Procesul se
numeşte generare de perechi şi se desfăşoară în felul următor: radiaţia γ de energie
022,1≥γE MeV, în câmpul coulombian al nucleelor (în câmpul nucleelor din necesitatea
conservării impulsului) generează o pereche electron – pozitron (pozitronul este
antiparticula electronului, având sarcina +e), ceea ce se scrie:
min,, EEEhE pozitroncelectronc ∆++== νγ

91
unde νh este energia fotonului, electroncE , este energia cinetică a electronului, iar pozitroncE ,
energia cinetică a pozitronului. Se observă că procesul nu poate avea loc decât dacă
minEE ∆≥γ, minE∆ fiind o energie de prag ( minE∆ = 2 Eo,e =1,022 MeV, unde Eo,e este
energia de repaus a electronului).
Este cunoscut şi procesul invers: un electron şi un pozitron în repaus se anihilează
rezultând doi fotoni de aceeaşi energie γE = 0,511 MeV = Eo,e , şi direcţii opuse, situaţie
impusă de legile de conservare ale energiei şi impulsului.

92
Capitolul 4: Termodinamică
Termodinamica studiază proprietăţile fizice ale sistemelor macroscopice, scoţând
în evidenţă, în special, legile care descriu mişcarea termică a materiei.
Făcând parte din fizica macroscopică, termodinamica este o teorie fenomenologică
şi ca atare, în obiectul său de studiu nu intră consideraţii privind natura intimă a materiei.
Termodinamica stabileşte pe baza unor principii generale, legi şi relaţii între parametrii
fizici ai unui sistem, indiferent de natura acestuia. Ca urmare, consecinţele care decurg din
legile termodinamicii sunt aplicabile în mod obligatoriu orcărui sistem fizic macroscopic.
4.1. Noţiuni termodinamice de bază
Sistemele pe care le studiază termodinamica sunt constituite dintr-un număr foarte
mare de elemente. Aceste elemente pot fi de natură foarte variată ca de exemplu: molecule,
electroni, nucleoni, nuclee atomice, fotoni, dipoli electrici, oscilatori, goluri într-un cristal,
etc. Tot ce nu face parte din sistem, formează mediul exterior.
Sistemul se numeşte izolat dacă acesta nu schimbă nici masă, nici energie cu
mediul exterior. Sistemul se numeşte neizolat dacă acesta interacţionează cu mediul
exterior.
Sistemul se numeşte închis, dacă între el şi mediul înconjurător există schimb de
energie dar nu există schimb de masă.
Sistemul se numeşte deschis, dacă între el şi mediul înconjurător există atât schimb
de energie cât si schimb de masă.

93
Starea unui sistem este definită printr-un ansamblu de proprietăţi pe care le are
sistemul la un moment dat. Starea sistemului termodinamic este determinată de un
ansamblu de mărimi fizice numite parametri de stare. Aceştia caracterizează proprietăţile
sistemului termodinamic în acel moment. Exemple de parametri de stare: masa, densitatea,
temperatura, presiunea, volumul, etc.
Se utilizează împărţirea parametrilor în două categorii:
- parametri intensivi, sunt acei parametri care nu depind de dimensiunea sau de
întinderea sistemului, ca de exemplu: temperatura, presiunea, potenţialul chimic, etc.
- parametri extensivi, sunt acei parametri care variază proporţional cu extinderea
sau masa sistemului, ca de exemplu: masa, energia, entropia, volumul, numărul de
particule, etc.
În unele cazuri parametrii de stare pot fi clasificaţi şi în alte două categorii:
parametri interni si parametri externi.
Starea unui sistem termodinamic se numeşte stare de echilibru termodinamic,
dacă toţi parametrii care o caracterizează nu se modifică în timp.
Starea unui sistem termodinamic se numeşte stare de neechilibru termodinamic,
dacă parametrii care o caracterizează se modifică în timp.
Trecerea sistemului dintr-o stare în alta se numeşte proces sau transformare de
stare.
Procesul se numeşte cvasistatic, dacă parametrii de stare variază în timp atât de
lent încât, la orice moment, sistemul să poată fi considerat în echilibru.
Procesul în urma căruia sistemul trece dintr-o stare iniţială de echilibru într-o stare
de echilibru finală fără a trece succesiv prin stări intermediare de echilibru se numeşte
proces necvasistatic.

94
Procesul în care, în urma schimbării semnului de variaţie al parametrilor de stare
sistemul evoluează de la starea finală spre cea iniţială trecând prin aceleaşi stări
intermediare de echilibru prin care a trecut în procesul iniţial, de la starea inţială la cea
finală, fără ca în mediul exterior să se fi produs vreo modificare, se numeşte proces
reversibil .
Prin definiţie toate procesele care nu sunt reversibile se numesc ireversibile. Toate
procesele necvasistatice sunt şi procese ireversibile. Experienţele şi întreaga practică ne
arată că procesele din natură sunt ireversibile.
Transformarea este numită ciclică dacă starea finală a sistemului termodinamic
coincide cu starea sa iniţială.
4.2. Sisteme termodinamice
4.2.1. Gazul ideal
Gazul ideal este cel mai simplu model cinetico-molecular folosit pentru gaze.
Caracteristicile principale ale acestui model sunt:
- gazul este format dintr-un număr foarte mare de particule (molecule sau atomi).
- dimensiunile moleculelor sunt mici în comparaţie cu distanţa dintre ele, astfel
încât ele pot fi considerate puncte materiale.
- moleculele se află într-o mişcare haotică continuă; mişcarea fiecărei molecule,
luată separat, se supune legilor mecanicii clasice.
- forţele intermoleculare se neglijează: moleculele se mişcă liber, traiectoriile lor
fiind linii drepte.
- ciocnirile dintre molecule gazului şi pereţii vasului în care se află sunt perfect
elastice.
95
Starea unui gaz ideal de masă m, la echilibru termodinamic este caracterizată de trei
parametri macroscopici de stare: presiune (p), volum (V), temperatură absolută (T), şi care
satisfac următoarea ecuaţie de stare:
pV = νµ
RTm
RT= (ecuaţia Clapeyron – Mendeleev) (4.1)
unde µ este masa molară, R este constanta universală a gazului ideal
R = 8310 J/ kmol k şi ν numărul de moli de gaz.
Dacă sistemul trece dintr-o stare de echilibru iniţială, într-o altă stare de echilibru
finală, cu modificarea celor trei parametri p,V,T, spunem că a avut loc o transformare
generală.
Gazul ideal, ca sistem termodinamic, poate suferi procese termodinamice în care
unul dintre parametri se menţine constant. Aceste transformări se numesc transformări
simple şi sunt:
a) Transformarea izotermă: T = constant
Din relaţia (4.1), prin considerarea temperaturii constante ⇒
pV = constant (4.2)
care reprezintă legea transformării izoterme (Legea Boyle - Mariotte)
b) Transformarea izobară: p = constant
Din relaţia (4.1), prin considerarea presiunii constante ⇒
V
T = constant (4.3)
care reprezintă legea transformării izobare (Legea Gay - Lussac)
c) Transformarea izocoră: V = constant
Din relaţia (4.1), prin considerarea volumului constant ⇒

96
p
T = constant (4.4)
care reprezintă legea transformării izocore (Legea Charles)
Pentru gaze se definesc următorii coeficienţi termici:
1)α p = 1
V
V
T p
∂∂
- coeficient de dilatare izobară
2) αV = 1
p
p
T V
∂∂
- coeficientul termic al presiunii
3) β T = - T
p
V
V
1
∂∂
- coeficient de compresibilitate izotermă
4) β S = - S
p
V
V
1
∂∂
- coeficient de compresibilitate adiabatică
unde S - reprezintă entropia sistemului
După efectuarea calculelor, pentru gazele ideale aceşti coeficienţi au valorile:
α p = αV =1
T, β T =
1
p,
p
1S γ
β =
4.2.2. Teoria cinetico - moleculară a gazului ideal
4.2.2.1. Calculul cinetic al presiunii unui gaz ideal
Bazându-ne pe caracteristicile modelului de gaz ideal, prezentate anterior, vom
stabili în continuare formula presiunii exercitate de gaz asupra pereţilor vasului.
Pentru stabilirea acestei formule se consideră un vas de formă cubică de latură l,
deci de volum V = l3, în care se află închis un gaz ideal alcătuit din N molecule identice,
fiecare de masă m.

97
Dacă se notează cu v1, v2, .....vN, modulele vitezelor pe care le au la un moment dat
cele N molecule care alcătuiesc gazul, atunci mărimea:
2v = v v v
N
N12
22 2+ +.. .. .
=
v
N
i
N2
1∑
se numeşte viteză pătratică medie .
Presiunea exercitată de gaz asupra pereţilor vasului este determinată de numărul
ciocnirilor exercitate de molecule pe unitatea de suprafaţă a peretelui, în unitatea de timp.
Să considerăm o moleculă de masă “m” care se deplasează cu viteza “v”, paralel cu
latura Ox a cubului.
Întrucât ciocnirea fiecărei molecule cu peretele vasului este perfect elastică, ea îşi
variază impulsul cu cantitatea:
∆ H = - mv - (mv) = - 2mv (4.5)
Conform teoremei variaţiei impulsului : ∆ H = f ∆ τ
unde ∆ τ teprezintă timpul cât durează ciocnirea dintre molecule şi perete, iar f forţa
medie cu care o moleculă ciocneşte peretele în intervalul de timp ∆ τ . Peretele
reacţionează la rândul lui cu o forţă egală şi de sens contrar. În urma ciocnirii molecula se
întoarce spre peretele opus cu care se ciocneşte tot perfect elastic după care revine la
primul perete. Timpul dintre două ciocniri consecutive ale unei molecule cu acelaşi perete
este:
∆ t = 2l
v (4.6)
Deoarece timpul ∆ τ cât durează ciocnirea este necunoscut, se înlocuieşte forţa de
ciocnire f cu forţa de ciocnire medie fm care acţionează asupra peretelui în intervalul de
timp ∆ t dintre două ciocniri consecutive.

98
În acest caz relaţia (4.5) devine :
2mv = fm ∆ t
de unde rezultă:
fm = 2mv
t∆ (4.7)
Ţinându-se seama de relaţia (4.6), se obţine pentru forţa medie fm cu care o
moleculă acţionează asupra peretelui expresia:
fm = mv
l
2
(4.8)
Se consideră că cele N molecule se distribuie uniform după cele trei direcţii, astfel
că pe fiecare din direcţiile Ox, Oy, şi Oz acţionează N/3 molecule. Cele N/3 molecule vor
produce pe un perete forţa:
F = 1
3 1
f m
N
i∑ = 1
3
2
1
mv
l
iN
∑ = mN
l3v 2
(4.9)
(am utilizat în formula de mai sus definiţia vitezei pătratice medii)
Presiunea exercitată pe perete va fi:
p =F
S =
F
l 2 =
1
3
N
l 3m v 2 =
1
3
N
V m v 2 =
1
3n m v 2 (4.10)
unde: N
V = n - concentraţia moleculelor (numărul de molecule din unitatea de volum).
Formula: p = 1
3n m v 2
reprezintă formula fundamentală a teoriei cinetico-moleculare a gazului ideal.
Această formulă se mai poate scrie şi sub forma:
p = 2
3n
mv 2
2 =
2
3n ε t (4.11)
unde: ε t - este energia cinetică medie a unei molecule în mişcarea de translaţie.

99
4.2.2.2. Interpretarea cinetico - moleculară a temperaturii
În cadrul acestei teorii se consideră că energia cinetică medie a mişcării de
translaţie a moleculelor unui gaz aflat la echilibru este o măsură a temperaturii sistemului
şi invers, temperatura unui gaz ideal este o măsură a intensităţii mişcării termice a
moleculelor.
În aceast caz rezultă că : ε t ~T
Termodinamica arată că formula completă este:
ε t = 3
2kT (4.12)
unde k = 1,38 . 10-23 J/K, este o constantă universală şi se numeşte constanta lui
Boltzmann.
Înlocuind formula (4.12) în relaţia ce reprezintă formula fundamentală a t.c.m.
(4.11) rezultă ecuaţia termică de stare a gazului ideal:
p = nkT (4.13)
În cazul gazului ideal, moleculele nu interacţionează între ele şi energia internă a
gazului este data numai de suma energiilor cinetice.
Dacă gazul ideal este monoatomic, moleculele nu au decât mişcări de translaţie şi
energia internă se exprimă prin suma energiilor cinetice medii de translaţie ale moleculelor
acelui gaz:
U = N . ε t = ν NA 3
2kT =
3
2 ν NA k T =
3
2 ν R T (4.14)
Relaţia anterioară reprezintă ecuaţia calorică de stare a gazului ideal monoatomic.
Pentru un gaz ideal cu un număr oarecare de atomi în moleculă relaţia de mai sus se
poate generaliza:

100
U = i
2 ν R T (4.15)
unde "i" reprezintă numărul de grade de libertate ale gazului.
i = 3 - pentru gazele monoatomice
5 - pentru gazele biatomice
6 - pentru gazele poliatomice
4.2.2.3. Viteza termică a moleculelor
Se defineşte viteza termică a moleculelor gazului ideal astfel:
vT = v 2
Egalând expresiile pentru energia medie de translaţie din relaţiile (4.11) şi (4.12)
rezultă:
mv 2
2 =
3
2kT ⇒ vT =
3kT
m (4.16)
sau: vT = 3RT
µ (4.17)

101
4.2.3. Gazul real
Aşa cum am constatat la modelul utilizat pentru gazul ideal, acest model nu ţine
cont de interacţiunea intermoleculară şi nici de volumul moleculelor gazului, considerând
moleculele punctiforme.
Wan der Waals (1837 - 1923) aduce corecţii modelului de gaz ideal, obţinând o
ecuaţie ce descrie mai bine comportarea gazelor în diferite transformări.
1. Wan der Waals a luat în consideraţie şi forţele de interacţiune dintre moleculele
gazului, constatând că aceste forţe contribuie cu un termen suplimentar la presiunea
gazului din vas, şi numeşte acest termen suplimentar presiune internă (pi).
A considerat presiunea internă ca fiind invers proporţională cu pătratul volumului
ocupat de gaz (urmând un raţionament de analiză a modului de interacţiune a moleculelor
gazului).
pi = a
V 2 (4.18)
unde "a" este o constantă a forţelor de legătură Wan der Waals.
2. În comprimarea gazelor la presiuni foarte mari, volumul nu se reduce la zero aşa
cum rezultă din ecuaţia gazului ideal. Din acestă cauză Wan der Waals a considerat că nu
trebuie neglijat volumul propriu al moleculelor gazului.
El a considerat că molculele sunt sfere rigide de diametru "d". Numeşte covolum
(b) volumul ocupat de toate moleculele dintr-un mol de gaz, găsind pentru acesta formula:
b = 4 NA v (4.19)
unde :”v” - reprezintă volumul propriu al unei molecule.
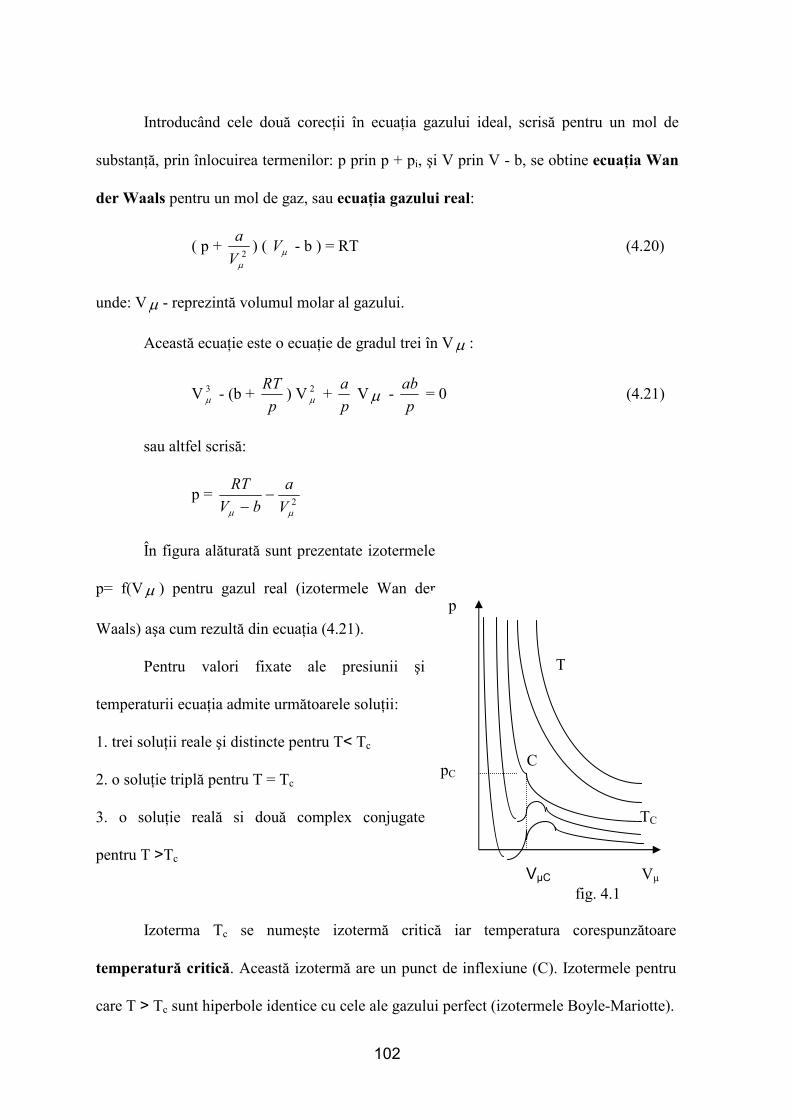
102
Introducând cele două corecţii în ecuaţia gazului ideal, scrisă pentru un mol de
substanţă, prin înlocuirea termenilor: p prin p + pi, şi V prin V - b, se obtine ecuaţia Wan
der Waals pentru un mol de gaz, sau ecuaţia gazului real:
( p + a
Vµ2
) ( Vµ - b ) = RT (4.20)
unde: Vµ - reprezintă volumul molar al gazului.
Această ecuaţie este o ecuaţie de gradul trei în Vµ :
V µ3 - (b +
RT
p) V µ
2 + a
p Vµ -
ab
p = 0 (4.21)
sau altfel scrisă:
p = RT
V b
a
Vµ µ−−
2
În figura alăturată sunt prezentate izotermele
p= f(Vµ ) pentru gazul real (izotermele Wan der
Waals) aşa cum rezultă din ecuaţia (4.21).
Pentru valori fixate ale presiunii şi
temperaturii ecuaţia admite următoarele soluţii:
1. trei soluţii reale şi distincte pentru T< Tc
2. o soluţie triplă pentru T = Tc
3. o soluţie reală si două complex conjugate
pentru T >Tc
Izoterma Tc se numeşte izotermă critică iar temperatura corespunzătoare
temperatură critică. Această izotermă are un punct de inflexiune (C). Izotermele pentru
care T > Tc sunt hiperbole identice cu cele ale gazului perfect (izotermele Boyle-Mariotte).
p
Vµ
pC C
VµC
TC
T
fig. 4.1

103
Pentru punctul critic se pot calcula valorile pc şi Tc ale presiunii si temperaturii: în
punctul critic Vµ = Vµc sau (Vµ - Vµc )3 = 0, care scrisă ca un binom la cub arată
astfel:
(Vµ - Vµc )3 = V µ3 - 3V µc V µ
2 + 3V µc
2 V µ - V µc
3 = 0 (4.22)
Comparând această ecuaţie cu ecuaţia gazului real (4.21) scrisă în punctul critic:
V µc
3 - (b +RT
p
c
c
) V µc
2 + a
pc
Vµc - ab
pc
= 0 (4.23)
rezultă prin identificarea coeficienţilor:
b +RT
p
c
c
= 3 V µc V µc = 3b
a
pc
= 3 V µc
2 ⇒ pc = a
b27 2 (4.24)
ab
pc
= V µc
3 Tc = 8
27
a
Rb
Parametrii critici pot fi deduşi într-un mod foarte general din condiţiile ca tangenta
la izoterma prin punctul critic să fie orizontală (dp
dVµ
=0) şi ca punctul critic să fie un punct
de inflexiune (d p
dV
2
2µ
=0).
Pentru T = constant obţinem:
dp
dVµ
= - ( )2bV
RT
−µ
+ 2
3
a
Vµ
= 0
şi d p
dV
2
2µ
= ( )
23
RT
V bµ − -
4
6
µV
a = 0

104
Cu ajutorul acestor ecuaţii şi înlocuind pe T şi Vµ cu Tc şi V cµ obtinem aceeaşi
parametrii critici ca şi cei calculaţi mai sus.
Valorile constantelor "a" şi "b" sunt caracteristice fiecărui gaz în parte. Ele se pot
determina măsurând valorile experimentale ale presiunii şi temperaturii critice pc şi Tc.
Ecuaţia stărilor corespondente
Putem transforma ecuaţia Wan der Waals (4.20) introducând în locul coordonatelor
p, Vµ şi T, alte coordonate, numite coordonate reduse, care au avantajul de a fi
adimensionale:
π = p
pc
; ω = V
V c
µ
µ
; τ = T
Tc
Dacă exprimăm constantele a, b, şi R din (4.24) în funcţie de pc, V µc , Tc ⇒
a = 3 pc V µc
2 ; b = V cµ
3 ; R =
8
3
p V
T
c c
c
µ
şi introducând aceste expresii şi coordonatele reduse în ecuaţia gazului real (4.20)
obţinem:
(π + 3
2ω ) ( 3 ω - 1) = 8 τ (4.25)
care se numeşte ecuaţia stărilor corespondente.

105
4.3. Legea barometrică şi distribuţia moleculelor din
atmosferă după altitudine
Mişcarea moleculelor în atmosferă se datorează atât agitatiei termice şi gravitaţiei,
cât şi variaţiilor de presiune la diferite înălţimi. Atmosfera Pământului nu este în echilibru
termic (temperatura scade cu altitudinea) şi ca atare mişcarea datorită agitaţiei termice este
mai complicată.
Pentru simplificarea calculelor se consideră o "atmosferă ideală", lipsită de vânturi
şi curenţi şi aflată în echilibru termic. Într-o astfel de "atmosferă ideală" mişcarea
moleculelor se datorează doar agitaţiei termice şi gravitaţiei.
Să considerăm o coloană verticală de atmosferă ideală cu înălţimea infinitezimală
dh. Presiunea în partea superioară o notam cu p1 iar în partea inferioară cu p2 > p1. Se poate
scrie:
dp = - ρ g dh (4.26)
Presiunea ρ g dh se datorează greutăţii coloanei de aer din atmosferă, dintre cele
două nivele, iar semnul minus se adaugă deoarece dp este negativă (presiunea scade cu
înălţimea) pentru un dh pozitiv (adică, la o creştere de înălţime dh apare o micşorare a
presiunii dp).
Din ecuaţia de stare a gazului ideal se poate calcula densitateaρ :
pV = m
µRT ⇒ ρ =
p
RT
µ
introducând relaţia de mai sus în ecuaţia (4.26) se obţine:
dp = - p
RT
µg dh

106
sau: dp
p = -
µg
RT dh
Integrând relaţia:
p
pdp
p0
∫ = - p
RT
µ∫h
dh0
⇒ ln p
p0
= - p
RT
µ h ⇒ p = p0 e
g
RTh−
µ
(4.27)
formulă cunoscută sub numele de legea barometrică. Această formulă arată că presiunea
în atmosferă scade cu altitudinea după o lege exponenţială.
Conoscând ecuaţia termică de stare a gazului ideal:
p = nkT
din legea barometrică rezultă:
nkT = n0kT e
g
RTh−
µ
⇒ n = n0 e
g
RTh−
µ
(4.28)
Dacă exprimăm masa molară µ în funcţie de masa unei molecule "m" obţinem:
µ = m NA
şi ţinem cont de relaţia: R = k NA , relaţia (4.28) devine:
n = n0 e
mgh
kT−
(4.29)
care reprezintă formula de distribuţie a moleculelor din atmosferă dupa energia potenţială a
unei molecule (mgh).
Această formulă se mai numeşte şi funcţia de distribuţie a moleculelor din
atmosferă dupa energia potenţială sau funcţia de distribuţie Boltzmann a moleculelor din
atmosfera terestră.
107
4.4. Distribuţia moleculelor unui gaz după modulul vitezei -
funcţia de distribuţie Maxwell
Se ştie că moleculele unui gaz au viteze diferite chiar şi la echilibru termic şi deci
se poate vorbi despre o distribuţie a vitezelor moleculelor.
Presupunem că într-un recipient se află un gaz omogen la echilibru termic alcătuit
dintr-un număr N foarte mare de molecule (deci alcătuind un sistem termodinamic) având
vitezele v1, v2, .... vn. Distribuţia Maxwell, arată că din acest număr total N de molecule,
există un număr dNV de molecule având vitezele cuprinse între v şi v + dv.
Acest număr dNv este dat conform teoriei probabilităţilor de relaţia:
dNV = N ·f(v) ·dv (4.30)
unde f(v) reprezintă funcţia de distribuţie a vitezei moleculelor, iar raportul dNV/N
reprezintă probabilitatea ca o moleculă să aibă viteza cuprinsă între v şi v + dv. Conform
statisticii Maxwell - Boltzmann, funcţia de distribuţie este de forma:
f(v) = 4π (m
kT2π)3/2 v2 e
mv
kT−
2
2 (4.31)
care reprezintă funcţia de distribuţie a moleculelor după modulul vitezei sau funcţia de
distribuţie Maxwell.
Întroducând această funcţie în relaţia (4.30) se obţine;
dNV = 4π N (m
kT2π)3/2 v2 e
mv
kT−
2
2 dv (4.32)
relaţie ce reprezintă legea de distribuţie Maxwell a moleculelor după modulul vitezei.
Ea este o lege statistică.
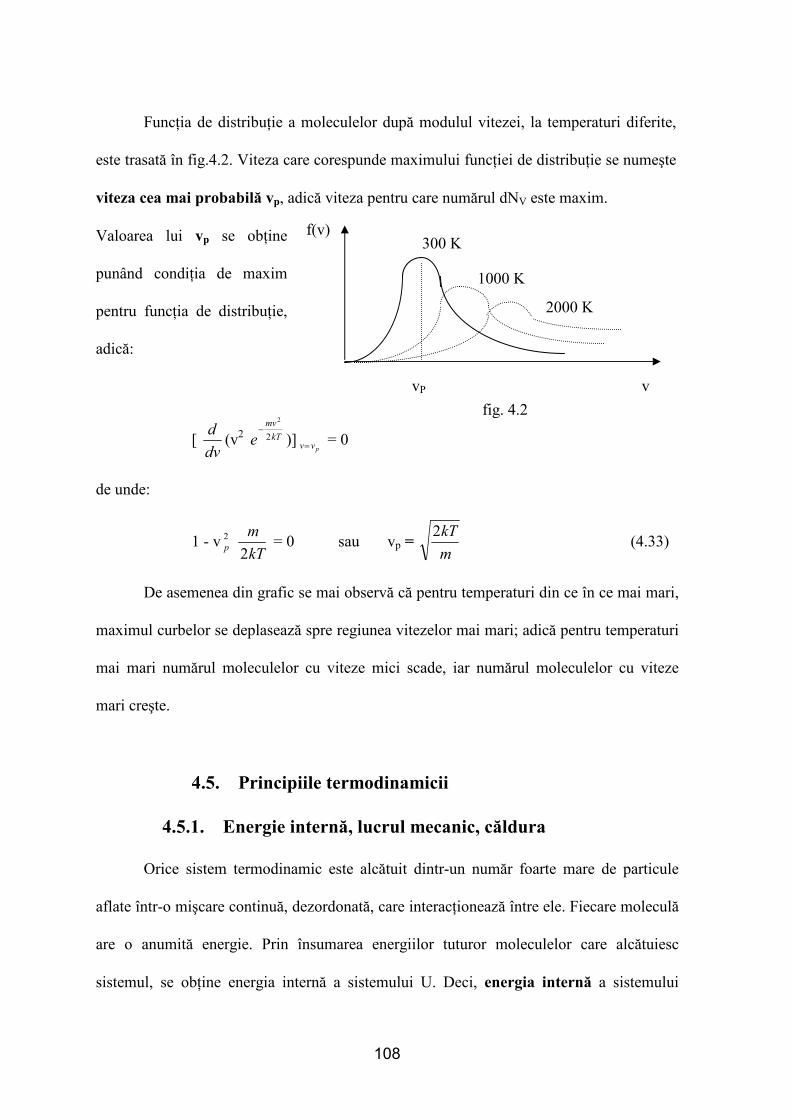
108
Funcţia de distribuţie a moleculelor după modulul vitezei, la temperaturi diferite,
este trasată în fig.4.2. Viteza care corespunde maximului funcţiei de distribuţie se numeşte
viteza cea mai probabilă vp, adică viteza pentru care numărul dNV este maxim.
Valoarea lui vp se obţine
punând condiţia de maxim
pentru funcţia de distribuţie,
adică:
[ d
dv(v2 e
mv
kT−
2
2 )] v vp= = 0
de unde:
1 - v p
2 m
kT2 = 0 sau vp =
2kT
m (4.33)
De asemenea din grafic se mai observă că pentru temperaturi din ce în ce mai mari,
maximul curbelor se deplasează spre regiunea vitezelor mai mari; adică pentru temperaturi
mai mari numărul moleculelor cu viteze mici scade, iar numărul moleculelor cu viteze
mari creşte.
4.5. Principiile termodinamicii
4.5.1. Energie internă, lucrul mecanic, căldura
Orice sistem termodinamic este alcătuit dintr-un număr foarte mare de particule
aflate într-o mişcare continuă, dezordonată, care interacţionează între ele. Fiecare moleculă
are o anumită energie. Prin însumarea energiilor tuturor moleculelor care alcătuiesc
sistemul, se obţine energia internă a sistemului U. Deci, energia internă a sistemului
f(v)
v
300 K
1000 K
2000 K
vP
fig. 4.2

109
termodinamic se defineşte ca fiind suma dintre energiile cinetice ale tuturor moleculelor
datorată mişcării de agitaţie termică şi energiile potenţiale ale lor determinate de forţele
intermoleculare, precum şi energiile potenţiale în câmpurile de forţe externe.
Ca exemplu, pentru gazul ideal energia internă este formată doar din suma
energiilor cinetice ale tuturor moleculelor datorată mişcării de agitaţie termică.
Energia internă este o funcţie de stare, ceea ce înseamnă că fiecărei stări a
sistemului îi corespunde o valoare bine determinată a energiei interne U.
Deci energia internă fiind o funcţie de stare, înseamnă că va fi la rândul ei complet
determinată de parametrii sistemului:
U = U (a1, a2, ...... an, T ) (4.34)
care constituie ecuaţia calorică de stare a sistemului termodinamic.
Pentru un sistem simplu, având volumul ca unic parametru extern:
U = U ( V, T ) (4.35)
În formă diferenţială ecuaţia (4.35) se scrie :
dU = ( )∂∂U
VT dV + ( )
∂∂U
TV dT (4.36)
Energia internă este o funcţie de stare şi admite diferenţială totală exactă. În
consecinţă când sistemul trece dintr-o stare (1), într-o stare (2), variaţia energiei interne
∆ U nu depinde decât de valorile acestor stări U1 şi U2 şi nu depinde de valorile
intermediare prin care a trecut sistemul (ceea ce este echivalent cu a spune că energia
internă este o funcţie de stare). Deci, pentru un proces ciclic ∆ U = 0.
Schimbul de energie dintre un sistem neizolat şi mediul exterior se poate produce
în două feluri diferite:
- prin variaţia parametrilor externi ai sistemului, ceea ce implică un schimb de lucru
mecanic cu mediul exterior.

110
- fără variaţia parametrilor externi ai sistemului, dar cu variaţia temperaturii, ceea
ce implică un schimb de căldură cu mediul exterior.
Trebuie remarcat că energia internă este o mărime care se referă la starea unui
sistem, pe când lucrul mecanic şi căldura sunt mărimi care se referă la o transformare a
sistemului. Din acest motiv, lucrul mecanic şi căldura sunt forme ale schimbului de
energie dintre sistem şi mediul exterior.
Q şi L nu sunt funcţii de stare, ele sunt mărimi de proces, în sensul că valoarea lor
depinde de procesul pe care l-a efectuat sistemul. De asemenea, precizăm că Q şi L nu
admit diferenţiale totale exacte, deci nu au sens notaţiile dQ şi dL, în locul cărora vom
folosi notaţiile δ Q şi δ L, cu precizarea că prin aceste notaţii nu înţelegem diferenţialele
acestor mărimi ci o valoare infinitezimală a lor într-o transformare elementară.
Prin convenţie vom considera:
L > 0 dacă lucrul mecanic este efectuat de sistem spre exterior
L < 0 dacă lucrul mecanic este efectuat din exterior asupra sistemului
Q > 0 dacă sistemul primeşte căldură din exterior
Q < 0 dacă sistemul cedează căldură mediului exterior
În cursul unei transformări elementare, lucrul mecanic efectuat de forţele de
presiune se scrie :
δ L = p dV (4.37)
iar cantitatea de căldură :
δ Q = C dT (4.38)
unde C = capacitatea calorică a sistemului

111
4.5.2. Principiul întâi al termodinamicii
Principiul întâi al termodinamicii este expresia principiului conservării energiei
pentru procesele în care intervine şi o cantitate de căldură.
Primul principiu se exprimă prin relaţia generală, valabilă pentru o transformare
infinitezimală a sistemului:
δ Q = dU + δ L (4.39)
Căldura primită de sistem se regăseşte în variaţia energiei interne a sistemului şi în
lucrul mecanic furnizat mediului exterior.
Pentru o transformare finită, forma integrală a principiului întâi este:
Q = ∆ U + L (4.40)
Câteva exemple de aplicare a primului principiu în unele procese termodinamice:
a) În cazul proceselor ciclice, întâlnite de exemplu la maşinile termice:
∆ U = 0 ⇒ Q = L
b) În cazul în care sistemul nu schimbă lucru mecanic cu exteriorul (V = const.):
L = 0 ⇒ QV = ∆ U
c) În cazul în care sistemul evoluează izolat, deci fără schimb de căldură şi fără
schimb de lucru mecanic:
∆ U = 0 ⇒ U = const.
deci energia sistemului rămâne constantă în timpul procesului.

112
4.5.2.1. Coeficienţi calorici
Se numeşte capacitate calorică a unui sistem mărimea definită prin relaţia:
C = δQ
dT, [C] = J/K
Se numeşte căldură specifică a unui sistem mărimea definită prin relaţia:
c = C
m =
1
m δQ
dT, [c] = J/Kg K
Se numeşte căldură molară a unui sistem mărimea definită prin relaţia:
C = µ c = µm
δQ
dT, [C ] = J/mol K
sau : C = 1
ν δQ
dT ; unde ν = numărul de moli
4.5.2.2. Relaţia Robert Mayer pentru gazul ideal
Pentru gaze, se constată o diferenţă între valorile coeficienţilor calorici în cazul
unei transformări izobare faţă de cei dintr-o transformare izocoră. Pentru gazul ideal relaţia
dintre aceşti coeficienţi este o relaţie simplă, numită relaţia Robert Mayer.
Pentru demonstraţie ne folosim de definiţiile coeficienţilor calorici şi de primul
principiu al termodinamicii:
Conform definiţiei, căldura molară la volum constant este:
CV = 1
ν (δQ
dT)V
ţinând cont de principiul întâi ⇒CV = 1
ν (δQ
dT)V =
1
ν( )∂∂U
TV
Conform definiţiei, căldura molară la presiune constantă este:
Cp = 1
ν (δQ
dT)p
113
ţinând cont de principiul întâi ⇒Cp = 1
ν (δQ
dT)p =
1
ν[ ( )
∂∂U
Tp + p ( )
∂∂V
Tp ]
Dar pentru gazul ideal: ( )∂∂U
Tp = ( )
∂∂U
TV deoarece energia internă a gazului ideal
depinde doar de temperatură.
Din ecuaţia de stare a gazului ideal: ( )∂∂V
Tp =
p
Rν
⇒ Cp = CV + p
ννR
p = CV + R
deci : Cp = CV + R (4.41)
care reprezintă chiar relaţia Robert Mayer între căldurile molare ale unui gaz ideal.
Relaţia se poate scrie şi între căldurile specifice:
cp = cV + R
µ (4.42)
şi între capacităţile calorice:
Cp = CV + ν R
Pentru gazele ideale căldura molară la volum constant este dată de relaţia:
CV = i
2R ; unde: i = 3 pentru gazele monoatomice, 5 pentru gazele
biatomice şi 6 pentru gazele poliatomice.
4.5.2.3. Transformări politropice ale gazului ideal
Transformările politropice sunt acele transformări în care capacitatea calorică a
sistemului rămîne constantă în cursul procesului.
C = constant

114
Deducerea ecuaţiei unei transformări politropice:
δ Q = ν CdT
dU = ν CV dT
ν CdT = ν CV dT + pdV
ν (C - CV) dT - pdV = 0 (4.43)
prin diferenţierea ecuaţiei de stare a gazului ideal rezultă:
pdV + Vdp = ν RdT (4.44)
şi înlocuirea lui dT din relaţia (4.44) în relaţia (4.43), rezultă:
(C - CV - R)pdV + (C - CV)Vdp = 0
sau ţinând cont de relaţia R. Mayer:
(C - Cp)pdV + (C - CV)Vdp = 0
împărţind relaţia cu produsul : pV(C - CV), rezultă:
C C
C C
dV
V
p
V
−
− +
dp
p = 0 (4.45)
Numim indice politropic (notat cu n) următorul raport:
n = C C
C C
p
V
−
− (4.46)
Prin integrarea relaţiei (4.45) obţinem ecuaţia transformărilor politropice:
pV n = const. (4.47)
în care indicele politropic n ia valori de la - ∞ la ∞ .
Transformările simple ale gazului ideal sunt şi ele transformări politropice, deci luând
valori particulare pentru indicele politropic vom regăsi legile transformărilor cunoscute:
a) n = γ ⇒ pV γ = const. - Transformarea adiabatică
Un sistem este izolat adiabatic dacă el nu schimbă căldură cu mediul exterior.

115
Q = 0 deci C = 0
rezultat care se deduce şi din relaţia de definiţie a indicelui politropic:
n = C C
C C
p
V
−
− = γ ⇒ C = 0
Ecuaţia acestui proces, aşa cum rezultă şi din ecuaţia transformărilor politropice
este:
pV γ = const. (4.48)
numită ecuaţia Poisson.
În coordonate (T, V) ecuaţia devine:
TV γ −1 = const. (4.49)
Lucrul mecanic într-o transformare adiabatică din starea (1) în starea (2) este:
L = pdVV
V
1
2
∫ = k dV
VV
V
γ1
2
∫ = k
1− γ(V V2
111− −−γ γ )
dar: p V p V1 1 2 2γ γ= = k
de unde prin înlocuirea constantei k:
L = p V p V1 1 2 2
1
−
−γ (4.50)
b) n = 1 ⇒ pV = const. - Transformarea izotermă
din: n = C C
C C
p
V
−
− = 1 ⇒ C→∞
Lucrul mecanic într-o transformare izotermă din starea (1) în starea (2) este:
L = pdVV
V
1
2
∫ = ν RT dV
VV
V
1
2
∫ = ν RT lnV
V
2
1
(4.51)
Deoarece dU = 0, rezultă că într-o transformare izotermă lucrul mecanic şi căldura
sunt egale, transformându-se reciproc în timpul procesului.

116
c) n → ∞ ⇒ V = const. - Transformarea izocoră
din: n = C C
C C
p
V
−
− → ∞ ⇒ C =CV
În acest caz lucrul mecanic este zero, variaţia energiei interne fiind o consecinţă a
schimbului de căldură cu exteriorul.
d) n = 0 ⇒ p = const. - Transformarea izobară
din: n = C C
C C
p
V
−
− = 0 ⇒ C =Cp
Lucrul mecanic într-o transformare izobară din starea (1) în starea (2) este:
L = pdVV
V
1
2
∫ = p (V2 - V1) = p∆V (4.52)
În figura 4.3 sunt reprezentate cele patru transformări :
fig. 4.3
Izoterma şi adiabata sunt hiperbole echilatere, dar panta adiabatei este mai mare
deoarece γ > 1.
p
V
V= const.
p=const.
T=const.
Q=0

117
4.5.3. Principiul al doilea al termodinamicii
4.5.3.1. Maşini termice . Ciclul Carnot
Considerăm un proces termodinamic ciclic reprezentat în figura 4.4, în planul pV.
În procesul 123 gazul efectuează lucrul mecanic pozitiv, iar în procesul 341 gazul se
comprimă şi deci lucrul mecanic efectuat va fi negativ.
Aria ciclului 12341 reprezintă lucrul mecanic efectuat pe întregul ciclul.
Aria unei transformări ciclice în planul de coordonate pV reprezintă
întotdeauna lucrul mecanic efectuat de sistem în acel ciclu.
Dacă ciclul este parcurs în sensul 1234 lucrul mecanic efectuat de sistem este
pozitiv, deci o maşină care ar funcţiona după un astfel de ciclu ar produce în exterior lucru
mecanic, această maşină numindu-se motor termic (fig. 4.5).
Randamentul unui motor termic este:
η = =−L
Q
Q Q
Q1
1 2
1
(4.53)
unde Q1(>0) - reprezintă căldura primită de
sistem în procesul ciclic de la o sursă de căldură
aflată la temperatura T1 ( termostatul de
temperatură superioară), respectiv Q2 (<0)
reprezintă căldura cedată de sistem în acel ciclu
unei alte surse aflate la temperatura T2
(termostatul de temperatură inferioară).
Q1
L
Q2
S. T.
T2
T1
fig. 4.5
fig. 4.4
p
V
1
3 2
4

118
Dacă ciclul este parcurs în sens invers,
adică 4321, obţinem schema de funcţionare a
unei maşini frigorifice sau pompe termice, care
pe seama lucrului mecanic efectuat în exterior,
transmite căldură de la sursa rece la sursa caldă
(fig. 4.6).
Maşinile frigorifice se caracterizează prin eficienţa frigorifică definită astfel:
ε f
Q
L= 2 (4.54)
Iar pompele termice sunt caracterizate prin eficienţa pompei definită asfel:
ε p
Q
L= 1 (4.55)
Ciclul Carnot
Ciclul Carnot este un ciclu biterm, reversibil, care corespunde unei maşini termice
ideale a cărei substanţă de lucru este un gaz ideal. Ciclul este constituit din două izoterme
corespunzătoare temperaturilor T1 şi T2 şi din
două adiabate (fig. 4.7).
Pentru a calcula randamentul unei maşini
termice care funcţionează după un ciclu Carnot,
conform formulei 4.53 este necesară aflarea
celor două călduri Q1 şi Q2 schimbate de sistem
cu mediul exterior într-un ciclu:
Q1
L
Q2
T1
S. T.
T2
fig. 4.6
V
p
A B
D C
fig. 4.7
T1
T2

119
Q1 = ν RT1lnV
V
B
A
şi Q2 = ν RT2 lnV
V
D
C
(4.56)
⇒ η C
L
Q
Q Q
Q= =
−
1
1 2
1
= 1 -
TV
V
TV
V
C
D
B
A
2
1
ln
ln
Pentru transformările adiabatice BC şi DA se poate aplica ecuaţia lui Poisson:
T1V B
γ −1 = T2V C
γ −1 şi T1V A
γ −1 = T2V D
γ −1 (4.57)
făcând raportul lor ⇒
V
V
B
A
= V
V
C
D
introducând acest raport în formula randamentului obţinem:
η C = 1 - T
T
2
1
(4.58)
În concluzie randamentul unei maşini termice care funcţionează după un ciclu ideal
Carnot este independent de natura agentului termic; el depinde doar de temperatura celor
două surse de căldură (termostate). Randamentul oricărei maşini termice care ar funcţiona
între aceleaşi temperaturi T1 şi T2 ar avea un randament mai mic decât randamentul η C .
4.5.3.2. Entropia
Pornind de la formula randamentului pentru ciclul Carnot se poate obţine o relaţie
algebrică între cantităţile de căldură şi temperaturile celor două surse:
η C
Q
Q
T
T= − = −1 12
1
2
1
; Q Q2 2= − ( Q2 <0 )
şi deci:

120
Q
T
Q
T
1
1
2
2
0+ = (4.59)
Acest rezultat poate fi generalizat: toate procesele ciclice reversibile efectuate de un
sistem oarecare, pot fi descompuse într-o sumă de cicluri Carnot infinitezimal mici
(fig.4.8), pentru fiecare astfel de ciclu infinitezimal fiind valabilă relaţia 4.59.
fig. 4.8
În fig. 4.8 ciclul reversibil reprezentat prin curba Γ (efectuat în sens orar) este
descompus în cicluri elementare prin trasarea unui număr mare de adiabate. Pentru fiecare
ciclu Carnot obţinut se aplică relaţia 4.59:
02
2
1
1 =+i
i
i
i
T
Q
T
Q δδ (i = n,1 )
unde iQ1δ este căldura elementară primită pe izoterma de temperatură T1i, iar iQ2δ este
căldura elementară cedată pe izoterma de temperatură T2i.
Pentru ciclul întreg scriem:
δ δQ
T
Q
T
i
i
i
ii
n1
1
2
21
0+
=
=∑
care la limită devine:
δQ
T∫ = 0 (4.60)
numită egalitatea Clausius.
p
V
Γ
iQ2δ
iQ1δ
121
Această relaţie constituie expresia cea mai generală a principiului II al
termodinamicii pentru procesele reversibile. Acest din urmă rezultat arată că luând
integrala între două stări 1 şi 2, mărimea δQ
T este independentă de drumul de integrare sau
altfel spus δQ
T este o diferenţială totală exactă (deci o funcţie de stare ).
Pentru procesele reversibile se defineşte funcţia de stare S - numită entropie:
dS = δQ
T (4.61)
(se observă că 1/T este un factor integrant pentru cantitatea de căldură)
Pentru trecerea sistemului din starea (1) în starea (2) variaţia entropiei este:
∫=−=2
1
12T
QSSS
δ∆ <S> = J/K (4.62)
Entropia are următoarele proprietăţi:
1. Entropia este o funcţie de stare
2. Într-o transformare adiabatică, reversibilă, entropia rămâne constantă.
3. Entropia este o funcţie aditivă.
4. Valoarea entropiei este definită până la o constantă arbitrară S0:
S = δQ
T∫ + S0 (4.63)
Variaţia entropiei în procesele ireversibile
Procesele reale sunt în general ireversibile. Într-un ciclu Carnot ireversibil sistemul
ar ceda sursei reci o cantitate mai mare de căldură decât în condiţii de reversibilitate, de
aceea η irev < η rev , astfel încât egalitatea lui Clausius devine o inegalitate:
δQ
T
irev∫ < 0 (4.64)

122
relaţie numită inegalitatea Clausius.
Pentru procesele ireversibile, entropia nu se defineşte. În acelaşi timp entropia fiind
o funcţie de stare, trebuie să putem determina variaţia ei între două stări (1) şi (2) în urma
unui proces ireversibil.
Fie un proces ciclic care este constituit din procese reversibile cât şi din procese
ireversibile (fig. 4.9).
fig. 4.9
Deci ciclul întreg este ireversibil şi putem scrie inegalitatea lui Clausius:
δQ
T
irev∫ = δ δQ
T
Q
T
irev
1
2
2
1
∫ ∫+ < 0
sau : δQ
T
irev
1
2
∫ + S1 - S2 < 0
sau în sfârşit : δQ
T
irev
1
2
∫ < S2 - S1 = ∆ S
deci : ∆ S > δQ
T
irev
1
2
∫ (4.65)
Pentru un sistem izolat δQirev este zero, deci :
∆ S > 0 (4.66)
Am arătat de asemenea că pentru un proces reversibil este valabilă relaţia:
∫=−=2
1
12T
QSSS
δ∆
Deci pentru un sistem izolat:
∆ S = 0 (4.67)
p
V
1 2
irev
rev

123
Combinând relaţiile 4.66 şi 4.67 obţinem:
∆ S ≥ 0 (4.68)
Cu ajutorul entropiei principiul al doilea al termodinamicii se poate enunţa astfel:
Un sistem termodinamic izolat va evolua astfel încât entropia sa să crească sau să
rămână cel mult constantă dacă procesul este reversibil.
Calculul entropiei gazului ideal
Într-o transformare reversibilă a gazului ideal variaţia entropiei este:
dS = δQ
T =
dU pdV
TC
dT
Tp
dV
TV
+= +ν
după integrare obţinem:
S = ( )ν C T R VV ln ln+ + S0 (4.69)
iar variaţia entropiei este:
∆S CT
TR
V
VV= +
ν ln ln2
1
2
1
(4.70)
4.5.4. Principiul al treilea al termodinamicii
Entropia sistemelor termodinamice este determinată până la o constantă aditivă,
motiv pentru care se impune stabilirea constantei S0.
Principiul al treilea al termodinamicii a fost formulat de către Nernst astfel: “ dacă
temperatura absolută a unui sistem tinde către zero entropia sa tinde către o valoare
constantă sau variaţia entropiei tinde către zero”:
.lim0
constSKT
=→
sau 0lim0
=∆→
SKT

124
Deci pentru T → 0 K, entropia sistemului nu poate fi modificată prin nici un fel de
acţiune. Planck a arătat că pentru T → 0 K nu numai ∆S, ci şi S →0. Formularea
principiului al treilea al termodinamicii dată de Planck este: “ când temperatura tinde la
zero absolut, entropia sistemului este nulă”:
0lim 00
==→
SSKT
Formularea principiului al treilea al termodinamicii se mai face şi astfel: “prin nici
o experienţă nu poate fi atinsă temperatura de 0 K”.
Din principiul al treilea al termodinamicii rezultă următoarele consecinţe:
1. capacităţile calorice Cx, pentru un parametru x constant, tind spre 0 pentru
T → 0 K
2. coeficientul de dilatare termică şi coeficentul termic al presiunii tind spre zero
când T → 0 K
3. este imposibilă atingerea temperaturii de zero absolut.
Să ne imaginăm un ciclu Carnot cu T2 = 0 (fig. 4.10). Variaţia entropiei pe întregul
ciclu este:
S∆ = δQ
T∫ = 1
1
T
Q
Dar conform principiului doi al
termodinamicii variaţia entropiei într-un
proces ciclic reversibil, cum este şi ciclul
Carnot, este zero (egalitatea Clausius). Deci:
S∆ = δQ
T∫ = 0 S fig. 4.10
T
T1

125
Se obţine că Q1/T1 = 0, deşi Q1 primită de la sursa caldă este nenulă. Această
contradicţie se explică prin aceea că s-a încercat să se presupună că se poate construi un
ciclu Carnot cu temperatura sursei reci T2 = 0 K.
Deci este imposibil să se realizeze un ciclu în care temperatura agentului termic să
atingă temperatura de 0 K sau altfel spus, temperatura absolută de 0 K nu poate fi atinsă.

126
Capitolul 5: Electricitate şi magnetism
5.1. Electrostatica
5.1.1. Saricina electrică. Legea Coulomb
Sarcina electrică este o proprietate a substanţei - o mărime fizică - care poate fi
pusă în evidenţă în condiţii specifice. Într-un şir de experienţe, efectuate la diferite
momente ale istoriei cunoaşterii umane, referitoare la electrizarea corpurilor, curenţii
electrici în conductori metalici, electroliţi şi gaze, structura cristalină a substanţei, structura
atomului şi apoi a nucleului, a fost pusă în evidenţă existenţa a doua tipuri de sarcini
electrice, pozitive (+) şi negative (-). Sarcina electrică cea mai mică, determinată pe cale
experimentală, este sarcina electronului care are valoarea: e = (1.6021±0.00007)10-19 C.
Unitatea de sarcină electrică în sistemul internaţional este C (coulombul).
Studiul fenomenelor electrice se bazează pe principiul conservării sarcinilor
electrice: într-un sistem izolat sarcina electrică totală, adică suma algebrică a
sarcinilor pozitive şi negative rămâne constantă.
Conform acestui principiu sarcina electrică totală într-un astfel de sistem se poate
modifica numai aducând sarcini electrice din exterior sau luând din acel sistem sarcini
electrice.
O ilustrare a principiului conservării sarcinilor electrice este experienţa în care la
întâlnirea unui pozitron (e+) cu un electron (e-) are loc transformarea acestora în radiaţie
electromagnetică. Masa de repaus a celor două particule se transformă în energia a două
cuante de radiaţie γ în acord cu relaţia lui Einstein, E=mc2. Sarcina totală este zero atât
înainte cât şi după acest proces:
e- + e+ → γ +γ

127
Principiul conservării sarcinilor electrice poate fi enunţat fie ca un postulat de baza
al teoriei electromagnetismului, fie ca o lege empirică verificată în toate observaţiile
experimentale.
În diferite cazuri practice, sarcinile electrice sunt distribuite pe o curbă, pe o
suprafaţă sau în interiorul unui volum, în aşa fel încât oricât de mic ar fi elementul de
curbă, de suprafaţă sau de volum, pe el se vor afla un număr foarte mare de particule
încărcte (electroni sau ioni ). Aşadar, practic se poate considera o distribuţie continuă a
sarcinii electrice pe elementul respectiv, neglijând structura discontinuă a sarcinilor
electrice. Astfel se pote defini noţiunea de densitate de sarcină.
Pentru cele trei situaţii posibile se definesc:
Densitatea liniară de sacină electrică:
dl
dq
l
ql
=∆
∆=
→∆ 0limλ
unde dq este elementul de sarcină distribuit pe elementul de lungime dl.
Pentru o porţiune finită, de lungime L, sarcina electrică q se calculează cu ajutorul
integralei:
q = ∫L
dlλ
Densitatea superficială de sacină electrică:
σ =dq
dS
unde dS reprezintă elementul de suprafaţă pe care se află elementul de sarcină dq.
Pentru o porţiune finită, de suprafaţă S, sarcina electrică q se calculează cu ajutorul
integralei:
q = ∫S
dSσ

128
Densitatea volumică de sacină electrică:
ρ =dq
dV
unde dV reprezintă elementul de volum pe care se află elementul de sarcină dq.
Într-un spatiu finit, de volum V, sarcina electrică q se calculează cu ajutorul integralei:
q = ∫V
dVρ
Legea Coulomb
Forţa de interacţiune dintre două sarcini electrice punctuale (a căror dimensiuni
sunt foarte mici în raport cu distanţa pe care le separă ) q1 si q2, aşezate în vid, se exercită
de-a lungul dreptei care le uneşte, este proporţională cu produsul sarcinilor şi invers
proporţională cu pătratul distanţei dintre ele:
rF12 = k
q q
rr1 2
123 12
r = - 21F
r (5.1)
unde r12 este distanţa dintre sarcinile punctuale iar k este o mărime a cărei valoare depinde
de sistemul de unităţi de măsură. Dacă sarcinile se află în vid, în sistemul internaţional de
unităţi k=1
4 0πε, în care ε 0 = 8,85. 10-12 F/m şi reprezintă permitivitatea electrică a
vidului. Pentru alte medii dielectrice: ε ε ε= r 0 , unde ε r reprezintă permitivitatea electrică
relativă a mediului respectiv.
Într-un sistem format din mai multe sarcini electrice punctuale forţa care acţionează
asupra unei sarcini este egală cu suma vectorială a forţelor care se exercită din partea
tuturor celorlalte sarcini (principiul independenţei acţiunii forţelor electrice).
Într-un sistem în care sarcina este distribuită continuu se exprimă un element de
forţă:

129
d2 rF = 123
12
21
04
1r
r
dqdq r
πε (5.2)
Deci între două distribuţii finite de sarcini se va exercita forţa:
r rF
dq dq
rr dV dV
VV
= ∫∫1
4 0
1 2
123 12 1 2
21πε
(5.3)
unde dV1 şi dV2 reprezintă cele două elemente de volum în care se află distribuite continuu
sarcinile dq1 şi dq2.
5.1.2. Câmpul electric
Câmpul electric este o stare a materiei care există în jurul sarcinii electrice, având
ca sursă sarcina electrică şi mijlocind interacţia dintre sarcini. Când corpurile încărcate cu
sarcină electrică sunt în repaus şi sarcina lor se află în echilibru, câmpul electric produs
este un câmp electrostatic.
5.1.2.1. Intensitatea câmpului electrostatic
Intensitatea câmpului electric este o mărime vectorială, funcţie de punct, egală cu
raportul dintre forţa electrică care se exercită asupra unui corp electrizat de probă, aflat
într-un anumit punct al câmpului electric, şi valoarea sarcinii electrice q a acestui corp.
Er
= 0
lim→q q
Fr
Valoarea sarcinii electrice q a corpului de probă, cu ajutorul căruia este pusă în
evidenţă forţa Fr
, trebuie sa aibă o valoare foarte mică pentru ca să nu fie perturbat câmpul
electric Er
ce se determină.

130
În sistemul internaţional de unităţi, pentru unitatea de măsură a intensităţii
câmpului electric se foloseşte V/m.
Dacă se cunoaşte intensitatea Er
a câmpului electric, atunci forţa pe care o exercită
asupra unei sarcini q se exprimă:
Fr
= q Er
(5.4)
Conform relaţiei (5.2) intensitatea câmpului electric în jurul unei sarcini punctuale q1 ia
forma:
Er
= 2
12
q
Fr
= 12312
1
04
1r
r
q r⋅
πε (5.5)
unde r12 este distanţa de la sarcina punctuală q1 pană în locul unde este calculată
intensitatea Er
a câmpului electric creat de această sarcină. Sarcina punctuală q2 joacă rolul
sarcinii de probă.
Pe baza principiului superpoziţiei, intensitatea câmpului electric creat de un sistem
de n sarcini punctuale are expresia:
Er
= j
n
j j
jr
r
q r∑=
⋅1
304
1
πε (5.6)
unde rj este distanţa de la o sarcina oarecare qj până la punctul în care se calculează
intensitatea câmpului electric Er
.
În cazul unei distribuţii continue de sarcină intensitatea câmpului electric se
calculează cu ajutorul integralei:
Er
= rr
dqr∫⋅ 3
04
1
πε (5.7)
Integrala se calculează pe volumul, suprafaţa sau linia pe care sunt distribuite sarcinile ce
crează câmpul electric.

131
5.1.2.2. Potenţialul electric. Relaţia dintre intensitatea
câmpului electric şi potenţialul electric
Lucrul mecanic efectuat împotriva forţei electrice (sau de către forţa electrică), la
deplasarea cu d rr
a unei sarcini punctuale q în câmpul electric se exprimă:
dL = Fr
· d rr
(5.8)
Ţinând cont de relaţia (5.4), relaţia de mai sus devine:
dL = q Er
· d rr
de unde se obţine:
q
dL= E
r· d r
r (5.9)
Se notează:
q
dL= - dV
deci rezultă:
dV = - Er
· d rr
(5.10)
Mărimea V se numeşte potenţial electric. În sistemul internaţional de unităţi,
unitatea de măsură a potenţialului electric este voltul (V).
Potenţialul electric se poate deci exprima cu ajutorul integralei astfel:
V = - ∫ ⋅ rdErr
+ constantă arbitrară (5.11)
Dacă se cunoaşte distribuţia în spaţiu a vectorului intensitate se poate calcula
variaţia finită a potenţialului cu ajutorul integralei:
V2 – V1 = ∆V = - ∫ ⋅2
1
rdErr
(5.12)

132
integrala fiind calculată pe un drum finit între punctele 1 şi 2 de coordonate (x1, y1, z1) şi
respectiv (x2, y2, z2).
Se numeşte tensiune electrică (U) diferenţa de potenţial V1 – V2
Utilizând relaţia (5.12), formula de calcul a tensiunii electrice dintre două puncte este:
U = ∫ ⋅2
1
rdErr
(5.13)
Dacă punctele 1 şi 2 coincid (deci integrala se face pe un drum închis l) atunci:
V1 = V2
deci relaţia (5.12) în acest caz devine:
∫ ⋅l
rdErr
= 0 (5.14)
Utilizând formula Stokes, integrala curbilinie pe drumul închis l se poate
transforma într-o integrală de suprafaţă, pe o suprafaţă oarecare S care se sprijină pe
această curbă:
∫ ⋅l
rdErr
= ∫∫ ⋅S
dSnErotrr
= 0 (5.15)
unde: rot Er
= Er
×∇ , iar “∇ ” este operatorul gradient.
Se ştie că operatorul gradient, notat cu “grad” sau “∇ “ (nabla), este dat de expresia:
∇ = kz
jy
ix
rrr
∂
∂+
∂
∂+
∂
∂
Din relaţia (5.15) rezultă:
rot Er
= 0 (5.16)

133
care este o relaţie de bază în elecrostatică. Această relaţie este echivalentă din punct de
vedere fizic cu afirmaţia că circulaţia pe un drum închis al vectorului intensitatea
câmpului electric este zero.
Exprimând intensitatea câmpului electric precum şi vectorul rdr
cu ajutorul
coordonatelor carteziene:
kEjEiEE zyx
rrrr++=
kdzjdyidxrdrrrr
++=
Se observă că relaţia (5.10) capată forma:
dV = - ( dzEdyEdxE zyx ++ ) (5.17)
Pe de altă parte, diferenţiala potenţialului electric poate fi scrisă:
dV = dzz
Vdy
y
Vdx
x
V
∂
∂+
∂
∂+
∂
∂ (5.18)
Confruntând relaţiile (5.17) şi (5.18) se obţin pentru componentele intensităţii câmpului
electric expresiile:
Ex = - dxx
V
∂
∂, Ey = - dy
y
V
∂
∂, Ez = - dz
z
V
∂
∂ (5.19)
Pe baza acestor relaţii intensitatea câmpului electric se poate exprima vectorial astfel:
)( kz
Vj
y
Vi
x
VE
rrrr
∂
∂+
∂
∂+
∂
∂−= (5.20)
Cum am arătat anterior operatorul gradient este dat de expresia:
∇ = kz
jy
ix
rrr
∂
∂+
∂
∂+
∂
∂
deci relaţia (5.20) se poate scrie în forma:
Ev
= - grad V
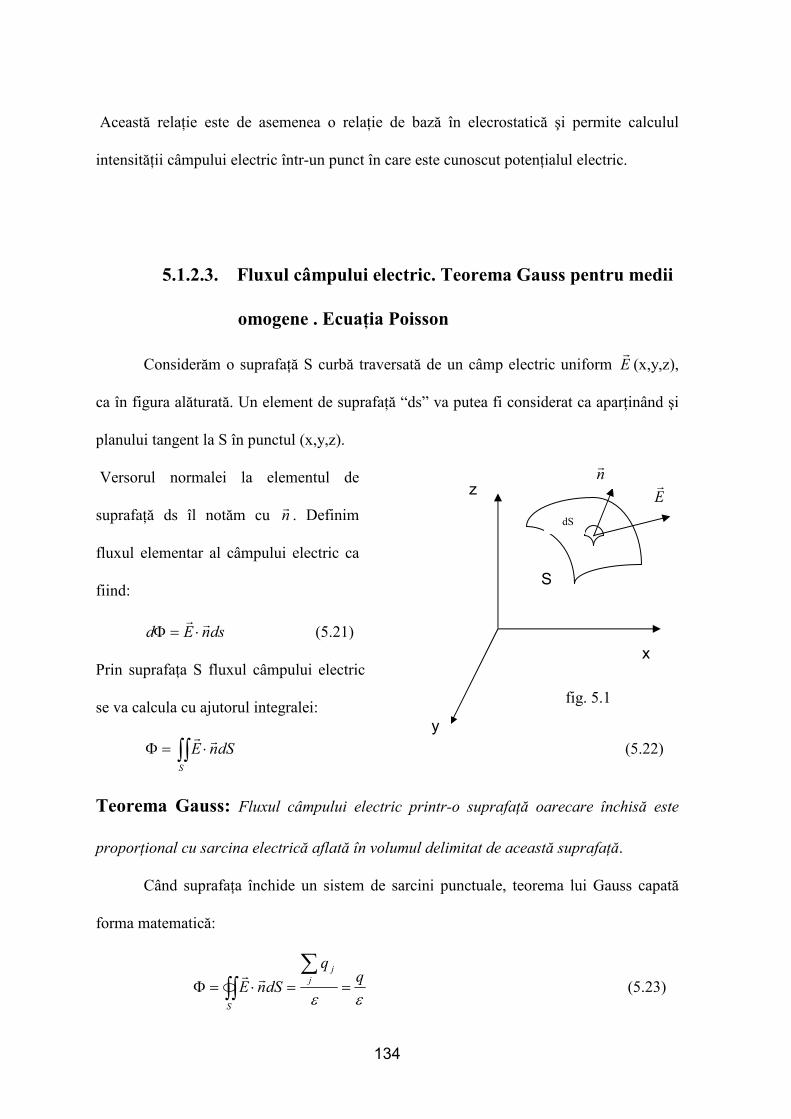
134
Această relaţie este de asemenea o relaţie de bază în elecrostatică şi permite calculul
intensităţii câmpului electric într-un punct în care este cunoscut potenţialul electric.
5.1.2.3. Fluxul câmpului electric. Teorema Gauss pentru medii
omogene . Ecuaţia Poisson
Considerăm o suprafaţă S curbă traversată de un câmp electric uniform Er
(x,y,z),
ca în figura alăturată. Un element de suprafaţă “ds” va putea fi considerat ca aparţinând şi
planului tangent la S în punctul (x,y,z).
Versorul normalei la elementul de
suprafaţă ds îl notăm cu nr
. Definim
fluxul elementar al câmpului electric ca
fiind:
dsnEdrr⋅=Φ (5.21)
Prin suprafaţa S fluxul câmpului electric
se va calcula cu ajutorul integralei:
∫∫ ⋅=ΦS
dSnErr
(5.22)
Teorema Gauss: Fluxul câmpului electric printr-o suprafaţă oarecare închisă este
proporţional cu sarcina electrică aflată în volumul delimitat de această suprafaţă.
Când suprafaţa închide un sistem de sarcini punctuale, teorema lui Gauss capată
forma matematică:
εεq
q
dSnEj
j
S
==⋅=Φ∑
∫∫rr
(5.23)
fig. 5.1
z
y
x
Er
S
nr
dS

135
unde s-a notat q = ∑j
jq , iar є este permitivitatea electrică.
În cazul în care suprafaţa închide o distribuţie continuă de sarcină, teorema Gauss
are expresia matematică:
∫∫∫∫∫ ==⋅=ΦVS
qdvdSnE
ερ
ε1rr
(5.24)
unde s-a notat q = ∫∫∫V
dVρ , iar ρ reprezintă densitatea volumică de sarcină electrică.
Utilizând formula Gauss - Ostrogradski, integrala pe suprafaţa S din relaţia precedentă se
transformă într-o integrală pe volumul V, unde V este volumul delimitat de suprafaţa S:
∫∫∫∫∫ ⋅=⋅VS
dVEdivdSnErrr
(5.25)
unde: div Ev
= =⋅∇ Er
( kz
jy
ix
rrr
∂
∂+
∂
∂+
∂
∂)· ( kEjEiE zyx
rrr++ ) =
z
E
y
E
x
E zyx
∂
∂+
∂
∂+
∂
∂
Utilizând relaţia (5.25), relaţia (5.24) devine:
∫∫∫ ⋅V
dVEdivr
= ∫∫∫V
dVρε1
, din care rezultă:
ερ
=Edivr
(5.26)
Folosindu-ne de relaţia: Ev
= - grad V sau )( kz
Vj
y
Vi
x
VE
rrrr
∂
∂+
∂
∂+
∂
∂−= (în această
relaţie V reprezintă potenţialul electric) şi înlocuind componentele intensităţii câmpului
electric cu ajutorul potenţialului electric, adică x
VE x ∂
∂−= ,
y
VE y ∂
∂−= ,
z
VE z ∂
∂−= ,
relaţia (5.26) devine:
ερ
−=∂
∂+
∂
∂+
∂
∂2
2
2
2
2
2
z
V
y
V
x
V

136
sau folosind notaţia pentru operatorul lui Laplace: =∆2
2
2
2
2
2
zyx ∂
∂+
∂
∂+
∂
∂
ερ
−=∆V (ecuaţia Poisson) (5.27)
În situaţia în care densitatea de sarcină este zero, dar există câmp electric, putem scrie:
0=∆V (5.28)
numita ecuaţia Laplace.
În paragrafele anterioare am întâlnit două ecuaţii fundamentale pentru câmpul electrostatic
:
rot Er
= 0, ceea ce în formă integrală se scrie ∫ ⋅l
rdErr
= 0
şi ερ
=Edivr
, ceea ce în formă integrală se scrie εq
dSnES
=⋅∫∫rr
Aceste ecuaţii, fie în formă diferenţială, fie în formă integrală, sunt ecuaţiile Maxwell
pentru electrostatică (sarcinile electrice se află în repaus).
5.1.3. Capacitatea electrică a corpurilor conductoare.
Condensatoare
Potenţialul unui singur conductor, încărcat electric, la echilibru, depărtat suficient
de alte conductoare, ca să nu se influenţeze electrostatic cu acestea, este acelaşi în toate
punctele sale şi se calculează cu ajutorul relaţiei:
∫∫=S r
dS
4
1V
σπε
(5.29)
unde r este distanţa dintre elementul de sarcină de pe suprafaţa dS, pe care se află
elementul de sarcină dSdq σ= şi punctul în care se calculează V.

137
Pe de altă parte, sarcina distribuită pe conductor se calculează cu ajutorul relaţiei:
∫∫=S
dSq σ (5.30)
Dacă pe conductor se mai aduc sarcini, σ din expresiile (5.29) şi (5.30) se
multiplică cu acelaşi factor, ceea ce face ca şi valorile lui V si q să se multiplice cu acelaşi
factor. Înseamnă că raportul dintre q şi V este o mărime constantă, o proprietate a
conductorului. Se notează acest raport cu C:
V
qC =
C se numeşte capacitatea electrică a conductorului.
Unitatea de măsură pentru capacitate în S.I. este faradul (F). În practică se folosesc
submultiplii faradului (10-12 ÷ 10-3 F).
Vom da mai jos, ca exemplu, calculul capacităţii electrice a unui conductor sferic
încărcat, la echilibru electrostatic, plasat în vid şi depărtat suficient de alte conductoare.
Folosind teorema Gauss, se găseşte pentru potenţialul electric al sferei:
R
qV ⋅=
04
1
πε
unde q este sarcina distribuită pe suprafaţa conductorului sferic iar R este raza
conductorului.
Capacitatea electrică a conductorului are în acest caz expresia:
V
qC = = R04πε (5.31)
Capacitatea electrică a unei sfere conductoare cu raza egală cu raza pământului are
valoarea de 0,7 · 10-3 F.

138
Fie doi conductori oarecare apropiaţi unul de altul, încărcaţi cu sarcinile electrice Q
si respectiv –Q, având potenţialele V1, respectiv V2. Aceşti doi conductori formează un
condensator electric a cărui capacitate este dată de relaţia:
21 VV
QC
−= (5.32)
Condensatorul plan este un sistem format din doi conductori plani, paraleli şi
apropiaţi unul de altul între care se găseşte un dielectric cu permitivitatea electrică ε. Pe cei
doi conductori plani (armături) se află sarcini egale şi de semn opus Q, respectiv +Q, iar
intensitatea câmpului dintre armături determinată cu ajutorul teoremei Gauss este dată de
expresia:
E =εσ
unde σ este densitatea superficială de sarcină de pe cele două armături (σ = Q/S, S este
aria unei armături). Er
este orientat perpendicular pe armături, cu sensul spre armătura
negativă.
Pentru calculul capacităţii condensatorului plan se utilizează relaţia dintre potenţial
şi intensitatea câmpului electric:
dV = - drErdE ⋅−=⋅rr
dUVVEdVVdrEdV 211
V
V
d
0
2
2
1
⋅==−⇒−=−⇒⋅−=∫ ∫ εσ
unde d este distanţa dintre cele două armături.
deci capacitatea condensatorului plan este:
21 VV
QC
−= =
d
S
d
Sε
εσσ
= (5.33)

139
Condensatorul sferic este format din doi conductori sferici încărcaţi cu sarcinile
electrice Q, respectiv -Q, de raze R1 şi R2, între care se găseşte un dielectric cu
permitivitatea electrică ε. Utilizând teorema Gauss valoarea intensităţii câmpului electric
într-un punct situat între cele două armături este:
2
1
4)(
r
QrE ⋅=
πε
Utilizând relaţia dintre potenţial şi intensitatea câmpului electric şi folosind
expresia pentru Er
din relaţia de mai sus, se obţine diferenţa de potenţial dintre armăturile
sferice:
)11
(44
)(21
21RR
QVV
r
QrV −=−⇒=
πεπε cu r ∈[R1, R2]
deci capacitatea condensatorului sferic este:
21 VV
QC
−= =
12
214RR
RR
−⋅πε (5.34)
Condensatorul cilindric este format din doi conductori cilindrici, aşezaţi coaxial,
încărcaţi cu sarcinile electrice Q, respectiv -Q, de raze R1 şi R2, fiecare de lungime l, între
care se găseşte un dielectric cu permitivitatea electrică ε. Raza conductorului interior R1
poate fi considerată atât de mică încât să putem scrie pentru acest conductor o densitate
liniară de sarcină λ.
Utilizând teorema Gauss valoarea intensităţii câmpului electric într-un punct situat
între cele două armături este:
r2
El
rl2Eπελ
ελ
πΦ =⇒=⋅= cu r ∈[R1, R2]
unde l reprezintă lungimea orcăreia dintre conductori.

140
Utilizând relaţia dintre potenţial şi intesitatea câmpului electric şi folosind expresia
pentru Er
din relaţia de mai sus, se obţine diferenţa de potenţial dintre armăturile
cilindrice:
1
21
V
V
R
R
2R
Rln
2VVdrEdV
2
1
2
1πελ
=−⇒⋅−=∫ ∫
deci capacitatea condensatorului cilindric este:
21 VV
QC
−= =
1
2
1
2 ln
2
ln2 R
Rl
R
Rl πε
πελλ
= (5.35)
5.1.4. Medii dielectrice
Un corp dielectric poate fi definit ca un corp care la echilibru electrostatic, în
general, modifică valoarea câmpului electric în spaţiul pe care îl ocupă.
Unele proprietăţi ale mediilor dielectrice pot fi studiate umplând cu ele spaţiul
dintre armăturile unui condensator plan.
La început sa considerăm că între plăcile condensatorului plan nu avem un
dielectric, ci vid. Capacitatea condensatorului se exprimă:
d
SC 00 ε= (5.36)
unde S este aria feţei interioare a uneia dintre plăci, d distanţa dintre armături şi 0ε
permitivitatea electrică a vidului.
Aplicând pe plăcile condensatorului diferenţa de potenţial U0, sarcina electrică de pe una
din plăci este:
q0 = C0U0 (5.37)

141
Introducând între plăcile condensatorului un dielectric omogen şi izotrop în condiţiile în
care sarcina pe plăci se păstrează aceeaşi se constată experimental că diferenţa de
potenţial scade la valoarea:
r
UU
ε0=
unde rε este permitivitatea electrică relativă a mediului dielectric. Întrucât sarcina
condensatorului rămâne aceeaşi putem scrie:
000
0 UCU
CCUqr
===ε
de unde rezultă:
C = 0Crε (5.38)
Deci capacitatea creşte de rε ori la introducerea dielectricului între plăci.
În absenţa dielectricului intensitatea câmpului este:
0
000 ε
σ==
d
UE
Numim inducţia câmpului electric mărimea dată de relaţia: ED ε=
Deci în absenţa dielectricului inducţia câmpului electric dintre plăcile
condensatorului plan are valoarea:
0000 σε == ED (5.39)
În prezenţa dielectricului intensitatea câmpului electric este:
0
000
εεσ
εε rrr
E
d
U
d
UE ====
de unde, se obţine pentru inducţia câmpului electric:
000 DEED r ==== σεεε (5.40)

142
În condiţiile în care sarcina pe plăcile condensatorului rămâne aceeaşi, inducţia
câmpului păstrează aceeaşi valoare în cele două situaţii, fară, şi cu dielectric.
Să analizăm ce se întâmplă dacă se păstrează neschimbată diferenţa de potenţial
dintre armături.
Dacă la introducerea dielectricului omogen şi izotrop diferenţa de potenţial aplicată
pe condensator se păstrează aceeaşi, ca atunci când dielectricul nu există, se constată
experimental că sarcina electrică de pe plăcile condensatorului creşte de rε ori.
Pentru sarcina electrică vom scrie:
q0 = C0U0
în situaţia fără dielectric şi:
q = CU0
în situaţia cu dielectric.
Dar întrucât: q = 0qrε rezultă în acest caz pentru capacitatea condensatorului:
0CC rε=
Deci şi în acest caz capacitatea condensatorului creşte de rε ori la introducerea
dielectricului între plăci.
Intensitatea câmpului electric este:
0
000 ε
σ===
d
UEE
aceeaşi în cele două situaţii, cu, şi fără dielectric.
Inducţia câmpului electric este:
0000 σε == ED
în situaţia fără dielectric şi:

143
σσεεσ
εεεε ===== 00
000 rrEED
sau
0DD rε=
în situaţia cu dielectric.
Obsevăm că, în condiţiile în care intensitatea câmpului se păstrează aceeaşi,
inducţia câmpului este mai mare în spaţiul ocupat de dielectric decât atunci când era vid.
Aceasta se datoreşte fenomenului de polarizare a dielectricului. Se poate introduce
noţiunea de intensitate de polarizare, sau simplu, polarizare. Se poate scrie:
PEDDD =−=−=− 000 εσσ
unde cu P s-a notat mărimea numită intensitate de polarizare sau polarizarea dielectricului.
Densitatea de sarcină:
0' σσσ −=
se regăseşte pe oricare din cele două feţe ale dielectricului şi constituie manifestarea
macroscopică a faptului că fiecare moleculă a dielectricului devine un dipol sau se
comportă ca un diopl, în câmpul electric. Sarcinile electrice, de pe feţele dielectricului, de
densitate superficială 'σ se numesc sarcini legate.
Rezultă că, în condiţiile stabilite mai sus polarizarea dielectricului se exprimă:
P = 'σ
Obsevăm că:
E)1(EE'P 0r00 εεεεσσσ −=−=−==
Se numeşte susceptibilitate electrică mărimea:
1−= re εχ
Deci polarizarea electrică se mai poate scrie:

144
EP eχε 0=
Cum intensitatea câmpului este o mărime vectorială înseamnă că şi polarizarea este
o mărime vectorială. De asemenea şi inducţia câmpului electric este o mărime vectorială.
Într-un mediu dielectric omogen şi izotrop cei trei vectori PDEvrr
,, au aceeaşi
direcţie, astfel că între cei trei vectori se pot scrie relaţiile:
PED
EP
ED
errr
rr
vr
+=
=
=
0
0
ε
χε
ε
unde ε şi eχ sunt mărimi scalare. În mediile anizotrope ε şi eχ sunt mărimi tensoriale. În
astfel de medii direcţiile celor trei vectori, în general, nu sunt aceleaşi.
5.1.5. Energia câmpului electrostatic
Să considerăm un condensator plan, încărcat, care are una dintre plăci (1) legată la
pământ. Cealaltă placă (2) va avea potenţialul V = q/C, unde q este sarcina de pe această
placă, iar C capacitatea condensatorului. În acest caz tensiunea dintre plăci U = V = q/C.
Pentru a trece sarcina dq de pe placa 1 pe placa 2 este necesar sa se efectueze lucrul
mecanic elementar:
dL = Udq = dqC
q
Dacă se porneşte de la starea când sarcina plăcii 2 este egală cu zero şi se ajunge la
starea cănd sarcina acestei plăci este q, lucrul mecanic efectuat este:
2
0
2
2
1
2
1
2CUqU
C
qdq
C
qL
q
==== ∫
if WWWL −=∆=

145
unde W reprezintă energia câmpului electrostatic dintre plăcile condensatorului.
Condensatorul fiind iniţial descărcat Wi = 0, deci energia electrostatică a câmpului
electric este W = Wf = L
Expresia energiei câmpului electrostatic al condensatorului este deci:
2
2
1CUW = (5.41)
Dacă utilizăm formulele deduse pentru condensatorul plan, relaţia de mai sus
devine:
VEEdd
SCUW 222
2
1)(
2
1
2
1ε
ε===
unde: V = Sd, volumul dintre cele două lăci, deci volumul în care există câmp electrostatic.
Împărţind W, cu V, obţinem densitatea energiei electrostatice localizată în spaţiul
dintre plăci w= W/V:
2
2
1Ew ε= (5.42)
Formula de mai sus se poate gerneraliza pentru orice conductor izolat, încarcat cu
sarcini aflate în echilibru electrostatic. Energia câmpului electrostatic se va localiza în
spaţiul din afara conductorului deoarece în interiorul conductorului, la echilibru
electrostatic, intensitatea câmpului este egală cu zero.
Dacă energia câmpului electrostatic nu este distribuită uniform în spaţiu atunci se
scrie densitatea de energie dintr-un volum elementar:
dVEwdVdW 2
2
1ε==
iar energia totală a câmpului electrostatic se calculează cu ajutorul integralei:
∫∫∫=V
dVEW 2
2
1ε (5.43)

146
5.2. Mărimi şi legi de bază în electrocinetică
5.2.1. Noţiuni introductive
Electrocinetica se ocupă de fenomenele determinate de deplasarea ordonată a
sarcinilor electrice.
Când un ansamblu de sarcini electrice (purtători de sarcină) se deplasează ordonat
într-un sens ia naştere un curent electric. Curenţii electrici sunt de două tipuri, de conducţie
şi de convecţie.
Curentul electric de conducţie constituie o mişcare ordonată a purtătorilor de
sarcină “liberi” dintr-un conductor sub acţiunea unui câmp electric.
Curentul electric de convecţie constituie o mişcare ordonată de sarcini electrice, dar
aceste sarcini aparţin unui corp macroscopic care este în mişcare. De exemplu, un curent
de convecţie ia naştere în mişcarea de revoluţie a Pământului dat fiind că acesta este
încărcat cu sarcini electrice.
Existenţa unui curent electric este pusă în evidenţă prin efectele termice, chimice şi
magnetice pe care acest curent le produce.
Convenţional, sensul curentului electric este considerat sensul de deplasare a
sarcinilor pozitive.
Dacă printr-o spurafaţă oarecare S, în intervalul de timp dt, trece sarcina dq,
intensitatea curentului electric se defineşte astfel:
dt
dqI = (5.44)
Intensitatea curentului electric este o mărime fizică scalară egală cu sarcina
transportată printr-o suprafaţă oarecare S în unitatea de timp.
În S.I. unitatea de masură a intensităţii este amperul (A).
147
În orice punct din spaţiu unde există un curent electric se poate defini un vector ir
,
numit densitate de curent, care are aceeaşi direcţie şi acelaşi sens cu direcţia si sensul de
mişcare ale sarcinilor pozitive. Modulul densităţii de curent este dat de relaţia:
ndS
dIi =
unde dSn este un element de suprafaţă perpendicular pe direcţia de deplasare a sarcinilor
electrice.
În S.I. unitatea de măsură a densităţii de sarcină este A/m2.
Dacă un element de suprafaţă dS este orientat oricum faţă de vectorul ir
, atunci
intensitatea dI a curentului prin acest element de suprafaţă se poate exprima:
dSnidIvr⋅=
unde nr
este versorul normalei la dS.
Pornind de la relaţia anterioară, intensitatea curentului printr-o suprafaţă finită S se
exprimă:
∫∫ ⋅=S
dsniIrr
(5.45)
5.2.2. Ecuaţia de continuitate
Să considerăm o suprafaţă oarecare S, închisă, care delimitează volumul V, în care
se află sarcina electrică q (fig.5.2):
∫∫∫=V
dVq ρ
unde ρ este densitatea volumică de sarcină.
Sarcina q se poate deplasa în timp prin
traversarea suprafeţei S, prin care se stabileşte
curentul de intensitate I:
V
ρ
S
fig. 5.2

148
∫∫∫ ∂∂
−=−=V
dVtdt
dqI
ρ
Aceeaşi intensitate se poate exprima cu ajutorul densităţii de curent:
∫∫ ⋅=S
dSniIrr
Pe de altă parte, conform teoremei Gauss-Ostrogradski se poate scrie:
∫∫ ∫∫∫=⋅S V
dVidivdSni )(rrr
Confruntând ultimele trei relaţii se poate scrie:
t
idiv∂
∂−=
ρr
sau: 0=∂
∂+
tidiv
ρr (5.46)
care se numeşte ecuaţia de continuitate.
La stabilirea acestei ecuaţii, aşa cum se poate constata din cele prezentate mai sus,
s-a folosit principiul conservării sarcinii electrice.
5.2.3. Curentul continuu în conductori metalici. Expresiile
locale ale legii Ohm şi legii Joule
În acest paragraf ne vom referi la curentul continuu ce se poate stabili într-un
conductor, omogen şi izotrop, menţinut la o temperatură normală.
Vom considera că, într-un astfel de conductor, purtătorii de sarcină ‘liberi” sunt
electronii.
Dacă luăm în calcul un conductor de formă cilindrică, de lungime l şi secţiune
transversală S, şi aplicăm la capetele lui o diferenţă de potenţial V1 – V2 (V1 > V2), în

149
conductor se stabileşte un curent de intensitate I, constantă în timp şi cu aceeaşi valoare în
oricare secţiune transversală a conductorului, pe care îl numim curent continuu.
Relaţia dintre intensitatea curentului I şi diferenţa de potenţial aplicată pe
conductor este dată de legea lui Ohm:
R
VVI 21 −= (5.47)
unde R este rezistenţa electrică a conductorului, o mărime care depinde de proprietăţile
intrinseci ale conductorului, de dimensiunile acestuia, cât şi de condiţiile exterioare. În
S.I. rezistenţa electrică are ca unitate de măsură ohmul (Ω ).
În funcţie de dimensiunile conductorului considerat mai sus, rezistenţa electrică se
exprimă:
S
lR ρ=
unde ρ este rezistivitatea electrică, o mărime care depinde de natura conductorului şi de
condiţiile exterioare. Se observă, conform relaţiei anterioare, că în S.I. unitatea de măsură
pentru rezistivitatea electrică este m⋅Ω . Inversul rezistivităţii:
ρ
σ1
=
se numeşte conductivitate electrică şi are ca unitate de masură în S.I. 11 −− ⋅Ω m .
Acum putem trece la stabilirea expresiei locale a legii Ohm. Pentru aceasta
obsevăm mai întâi că relaţia (5.47) capătă forma:
Sl
U
S
l
VVI 21 σ
ρ=
−= (5.48)

150
În relaţia anterioară se înlocuieşte expresia intensităţii câmpului electric l
UE =
pentru acest tip de conductor. Pe de altă parte se poate exprima densitatea de curent S
Ii = .
Astfel că, pornind de la relaţia (5.48) putem scrie:
Ei σ=
Întrucât în cazul unui conductor omogen şi izotrop σ este un scalar iar ir
are sensul
şi direcţia lui Er
se poate scrie:
Eivr
σ= (5.49)
care reprezintă chiar expresia locală a legii Ohm.
Când într-un conductor se stabileşte un curent continuu de intensitate I în
conductor se degajă o căldură a cărei expresie este dată de legea Joule:
Q = RI2t (5.50)
unde R este rezistenţa conductorului iar t este durata curentului prin conductor. Pentru a
stabili forma locală a legii Joule vom introduce noţiunea de densitate a puterii termice w:
Slt
Qw =
mărime numeric egală cu căldura care se degajă în unitatea de volum a conductorului, în
unitatea de timp.
Folosind relaţia (5.50) se poate scrie:
2
22 1
iSl
Is
l
Slt
tRIw
σ
ρ===
Folosind substituţia 222 Ei σ= se obţine:
2Ew σ= (5.51)
care reprezintă expresia locală a legii Joule.

151
5.2.4 Tensiunea electromotoare
Un câmp electrostatic nu poate întreţine un curent electric pe un drum închis,
deoarece câmpul produce un lucru mecanic total nul asupra unei sarcini care urmează un
astfel de drum. Dacă un astfel de câmp favorizează deplasarea sarcinii pe o porţiune a
drumului, el se va opune deplasării în acelaşi sens a sarcinii în restul drumului.
Când la bornele unei surse de energie electrică este conectat un rezistor, în rezistor
se stabileşte un curent al cărui sens este de la potenţialul ridicat la potenţialul scăzut, de la
borna pozitivă a sursei, la borna ei negativă. Sarcina pozitivă se deplasează în sensul
câmpului coulombian. Pentru a păstra, în oricare punct al circuitului, inclusiv în interiorul
sursei, acelaşi sens de deplasare a sarcinii pozitive, trebuie ca în interiorul sursei să se
efectueze un lucru mecanic împotriva câmpului coulombian. Raţionamentul se poate face
şi pentru electron schimbând sensul de parcurgere al circuitului închis.
Lucrul mecanic efectuat asupra sarcinii în interiorul sursei îl putem asocia unui
“câmp electromotor“ sau “câmp imprimat“, a cărui natură diferă, în general, de a
câmpului coulombian şi a cărui existenţă este legată de conversia unei forme de energie, în
energie electrică (în sursa galvanică - energia chimică, în termoelement - energia termică,
în fotoelement - energia luminoasă, în generatoarele rotative de curent electric - energia
mecanică, toate aceste forme de energie se transformă în energie electrică).
În general, putem spune că într-un punct al circuitului o sarcină este supusă acţiunii
câmpului:
SC EEErrr
+=
unde CEr
este câmpul electric coulombian iar SEr
este câmpul electromotor din interiorul
sursei. Câmpul electromotor, de regulă, este nul în unele puncte, sau chiar pe porţiuni mari

152
ale circuitului. Se întâlnesc şi situaţii particulare - în cazul inducţiei electromagnetice -
când acest câmp electromotor acţionează în orice punct al circuitului.
Circulaţia vectorului Er
de-a lungul unei linii de circuit închis (când circuitul este
închis) se poate scrie:
ldEldEldE SC
rrrrrr
∫∫ ∫ +=
Prima integrală din membrul drept este nulă, deoarece circulaţia câmpului
coulombian pe un drum închis este nulă. Integrala a doua din membrul drept este diferită
de zero când în circuit se găseşte o sursă de energie electrică. Cu ajutorul acestei integrale
se defineşte tensiunea electromotoare E a sursei.
E = ldES
rr⋅∫
Tensiunea electromotoare este o mărime fizică egală cu lucrul mecanic efectuat
de câmpul electromotor asupra unei sarcini pozitive unitare pe porţiunea de circuit (de
sursă) în care acest câmp există. Câmpul electromotor acţionează asupra sarcinii pozitive
asfel încât curentului să i se asigure în interiorul sursei acelaşi sens ca şi în circuitul
exterior sursei.
Luând în considerare forma locală a legii Ohm dedusă în paragraful anterior,
tensiunea electromotoare definită mai sus, cât şi principiul conservării sarcinii electrice, se
pot deduce uşor, ca aplicaţii directe, legea Ohm generalizată şi teoremele Kirchhoff.

153
5.3. Electromagnetism
5.3.1. Câmpul magnetic. Inducţia câmpului magnetic
În spaţiul din jurul unui curent electric (sau din jurul sarcinilor electrice ce se
deplasează cu viteză constantă) cât şi din jurul magneţilor permanenţi se stabileşte o stare
a materiei numită câmp magnetic.
Existenţa câmpului magnetic este pusă în evidenţă prin intermediul forţei cu care
acţionează câmpul magnetic asupra unui curent (altul decât cel care ar putea eventual
genera câmpul magnetic).
Forţa are expresia:
BlIdFdrrr
×= (5.52)
Această forţă este numită forţă electromagnetică şi este dată deci de produsul
vectorial (fig. 5.3) dintre factorul lIdr
, unde I este intensitatea curentului ce străbate
porţiunea de circuit ldr
, şi mărimea vectorială Br
, care este o mărime ce caracterizează
câmpul magnetic, numită inducţia câmpului magnetic. Relaţia anterioară poate fi
considerată ca relaţie de definiţie a inducţiei câmpului magnetic.
Modulul forţei se va scrie:
dF = (Idl)·Bsinα
şi ia valori între IBdl, când 2
πα = şi 0, când 0=α .
Se observă că măsurând modulul forţei dF, intensitatea curentului I şi porţiunea de circuit
dl, se poate determina experimental modulul inducţiei câmpului magnetic B.
Unitatea de măsură în S.I. pentru inducţia magnetică este tesla (T).
Pentru a afla forţa electromagnetică care acţionează asupra întegului circuit de lungime l se
integrează relaţia (5.52):
lIdr B
r
Fdr
α
fig. 5.3
154
)(0∫ ×=l
BldIFrrr
(5.53)
care în cazul simplu al unui conductor rectiliniu devine:
αsinBIlF =
Acţiunea câmpului magnetic asupra unui curent electric reprezintă în esenţă
acţiunea câmpului magnetic asupra sarcinilor electrice în mişcare. Forţa cu care un câmp
magnetic acţionează asupra unei sarcini electrice în mişcare se numeşte forţa Lorentz.
Fie dq sarcina elementară pozitivă pe care curentul de intensitate I o transportă în
intervalul de timp dt de-a lungul conductorului dl. Viteza de transport a sarcinii electrice
este: vdtdldt
dlv =⇒=
Prin definiţie avem: dt
dqI =
Introducând această relaţie în formula forţei electromagnetice, obţinem:
dF = (Idl)·Bsinα = dq·v·B·sinα
Prin integrare pentru întreaga sarcină q, se obţine:
∫ =⋅=q
qvBdqvBF0
sinsin αα
Deoarece pentru sarcina pozitivă, vectorul vqr
are aceeaşi orientare cu lIdr
,
obţinem expresia vectorială a forţei Lorentz:
)( BvqFrrr
×⋅=
Această forţă este perpendiculară atât pe direcţia de mişcare a particulei cât şi pe
direcţia inducţiei câmpului magnetic. Datorită forţei Lorentz, o particulă încărcată electric
este deviată la trecerea prin câmpul magnetic.

155
5.3.2. Legea Biot-Savart-Laplace
Legea Biot-Savart-Laplace dă expresia inducţiei câmpului magnetic la distanţa r de
elementul de curent lIdr
(fig.5.4):
34 r
rlIdBd
rrr ×=
πµ
(5.54)
unde µ este permeabilitatea magnetică a mediului.
În cazul unui circuit de lungime l inducţia
câmpului magnetic într-un anumit punct se
calculează prin integrarea relaţiei (5.54):
∫×
=l r
rldIB
34
rrr
πµ
(5.55)
Dacă se ţine seama de relaţia dintre intensitatea curentului şi densitatea de curent
ir
, care poate fi scrisă ca fiind dVilIdrr
= , unde dV este volumul porţiunii de curent
considerate, atunci relaţiile (5.54) şi (5.55) pot fi aduse la forma:
dVr
riBd
34
rrr ×=
πµ
(5.56)
şi
∫×
=V
dVr
riB
34
rrr
πµ
(5.57)
unde V este volumul ocupat de curentul electric, în particular, de conductorul în care s-a
stabilit curentul electric considerat.
În cazul particular al conductorului rectiliniu infinit r
IB
πµ2
= , iar în cazul unei
bobine l
NIB µ= (unde N reprezintă numărul de spire iar l lungimea bobinei).
l rr
lIdr
fig. 5.4
Bdr

156
5.3.3. Fluxul inducţiei câmpului magnetic
Fluxul inducţiei câmpului magnetic print-o suprafaţă elementară dS se defineşte
(fig. 5.5):
dSnBdrr⋅=Φ (5.58)
unde nr
este versorul normalei la dS.
Fluxul printr-o suprafaţă S (fig. 5.5) se va
exprima:
∫∫ ⋅=ΦS
dSnBrr
(5.59)
Unitatea de măsură pentru fluxul câmpului magnetic în S.I. este weberul (Wb).
1Wb = 1T·1m2.
Ţinând cont de faptul că în cazul câmpului magnetic nu avem surse, fluxul
inducţiei magnetice printr-o suprafaţă închisă este egal cu zero.
0=⋅=Φ ∫∫S
dSnBrr
(5.60)
Pe baza teoremei Gauss – Ostrogradski se poate scrie:
0)( ==⋅∫∫ ∫∫∫S V
dVBdivdSnBrrr
unde S este suprafaţa închisă, iar V este volumul delimitat de suprafaţa S.
Deci se obţine:
0=Bdivr
(5.61)
care reprezintă una din ecuaţiile diferenţiale ale lui Maxwell. Faţă de electrostatică unde
ερ
=Edivr
, în cazul câmpului magnetic 0=Bdivr
, ceea ce semnifică faptul că în cazul
câmpului magnetic nu avem surse.
Br
nr
ds
S
α
fig. 5.5

157
Relaţia 0=Bdivr
este valabilă nu doar pentru câmpuri magnetice constante (în
magnetostatică) ci şi în cazul câmpurilor magnetice variabile.
5.3.4. Legea circuitului magnetic (legea circuitală Ampère)
Legea circuitală Ampère stabileşte că circulaţia vectorului inducţie magnetică Br
,
pe un drum închis l, este proporţională cu intensitatea curentului I care trece printr-o
suprafaţă oarecare S ce se sprijină pe drumul l (fig. 5.6).
fig. 5.6
∫ =⋅l
IldB µrr
(5.62)
De la forma finită (integrală) a legii circuitale Ampère se poate trece la forma ei
diferenţială care constituie totodată una dintre ecuaţiile Maxwell în formă particulară,
valabilă doar în cazul magnetostaticii (a câmpurilor magnetice constante în timp).
Folosind teorema Stokes putem scrie:
∫ ∫∫ ⋅=⋅l S
dSnBrotldBrrrr
)( (5.63)
unde S este o suprafaţă oarecare care se sprijină pe drumul închis l (fig. 5.6).
Pe de altă parte, membrul drept al relaţiei (5.62) poate fi scris sub forma:
I
l
ldr
Br
S

158
∫∫ ⋅=S
dSniIrr
µµ (5.64)
unde ir
este vectorul densitate de curent.
Ţinând seama de relaţia (5.64) legea circuitală Ampère devine:
∫ =⋅l
ldBrr
∫∫ ⋅S
dSnirr
µ (5.65)
Din confruntarea relaţiilor (5.63) şi (5.65) se obţine ecuaţia diferenţială;
iBrotrr
µ= (5.66)
care reprezintă o formă particulară a uneia din ecuaţiile Maxwell, cu valabilitate doar în
domenilul magnetostaticii. Forma generală a acestei ecuaţii va fi dată în capitolul în care
ne ocupăm de câmpul electromagnetic. Forma generală implică postularea unui termen
suplimentar în membrul drept al ecuaţiei, numit curent de deplasare.
De asemenea, ecuaţia de mai sus, care exprimă forma diferenţială a legii circuitale
Ampère, pune în evidenţă caracterul rotaţional al câmpului magnetic (în jurul curenţilor
există linii de câmp magnetic închise care înconjoară curentul electric).
5.3.5. Inducţia electromagnetică
Fenomenul de inducţie electromagnetică, descoperit de Faraday încă din 1831,
poate fi pus în evidenţă prin nenumărate experienţe simple care arată că în orice circuit, în
cazul variaţiei fluxului inducţiei magnetice prin suprafaţa delimitată de acel circuit, apare
un curent electric numit curent de inducţie. Existenţa curentului este determinată de
tensiunea electromotoare indusă în circuit. Experienţele arată că mărimea t.e.m. de
inducţie nu depinde de modul în care se realizează variaţia fluxului magnetic Φ, ci numai
de viteza de variaţie a lui Φ, adică dt
dΦ. Într-adevăr, din expresia fluxului inducţiei

159
magnetice αcosBS=Φ , rezultă posibilitatea de a produce o variaţie a fluxului prin
modificarea unuia din parametrii: B, S sau α.
Pentru a stabili relaţia dintre t.e.m. indusă şi viteza de variaţie a fluxului,
considerăm circuitul din figura 5.7, cu o latură de lungime l mobilă, latură care se
deplasează perpendicular pe direcţia inductiei câmpului magnetic, cu viteză constantă.
La deplasarea conductorului, electronii
din interiorul acestuia se vor deplasa cu aceeaşi
viteză în raport cu câmpul magnetic Bv
şi asupra
lor va acţiona forţa Lorentz:
)( BveFrrr
×⋅−=
şi de modul F = evB, orientată în lungul
conductorului.
Acţiunea acestei forţe este echivalentă cu acţiuna unei forţe electrice, determinată
de un câmp electric E:
eE = evB sau E = vB
Acest câmp este de origine neelectrostatică, este un câmp imprimat (electromotor)
şi circulaţia sa pe un contur, dă mărimea t.e.m. induse iε :
iε = ∫ ===⋅dt
dSB
dt
lvdtBvBlldE
rr
unde dS = lvdt reprezintă variaţia ariei circuitului străbatut de câmpul magnetic de inducţie
Br
în intervalul de timp dt (fig. 5.7). În calculul integralei s-a ţinut seama că E ≠ 0 numai
pe lungimea l . Folosind dΦ = BdS, obţinem formula de legătură dintre t.e.m. şi viteza de
variaţie a fluxului inducţiei magnetice:
dt
di
Φ−=ε (5.67)
Fr
Br
vr
vdt
fig. 5.7
160
unde semnul minus indică sensul t.e.m. induse în funcţie de variaţia fluxului (legea lui
Lenz).
Relaţia (5.67) exprimă legea lui Faraday pentru inducţia electromagnetică:
t.e.m. indusă iε într-un circuit este egală cu viteza de variaţie a fluxului inducţiei
magneticeΦ prin acel circuit, luată cu semn schimbat.
Se poate arăta că legea lui Faraday este independentă de modul în care s-a produs
variaţia fluxului magnetic prin circuit: prin schimbarea formei circuitului, prin rotirea lui,
prin deplasarea într-un câmp magnetic neuniform sau prin însăşi variaţia în timp a
câmpului magnetic.
A doua lege a inducţiei electromagnetice este legea lui Lenz, lege care indică
sensul t.e.m. induse: curentul indus are sensul pentru care fluxul inducţiei magnetice
induse se opune variaţiei fluxului magnetic inductor. Aceasta înseamnă că dacă fluxul
magnetic inductor scade (dt
dΦ < 0), sensul curentului de inducţie este astfel încât să creeze
un câmp magnetic propriu, de acelaşi sens cu câmpul magnetic inductor, iar dacă fluxul
magnetic inductor creşte (dt
dΦ > 0), curentul indus are acel sens care determină un câmp
magnetic indus de sens contrar sensului câmpului magnetic inductor.
Maxwell, generalizând rezultatele experimentale cu privire la fenomenul de
inducţie electromagnetică, a ajuns la concluzia că în toate punctele spaţiului unde există
un câmp magnetic variabil în timp apare întotdeauna un câmp electric, independent de
existenţa unui conductor electric; conductorul nu face decât să pună în evidenţă existenţa
câmpului electric prin apariţia curentului electric.

161
Câmpul electric indus se numeşte câmp electrodinamic; spre deosebire de câmpul
electrostatic, câmpul electrodinamic este rotaţional. Într-adevăr, din legea lui Faraday şi
din definiţia fluxului magnetic rezultă:
∫ ∫∫ ∫∫ ∂∂
−=−=⋅l S S
dSnt
BdSnB
dt
dldE
rr
rrrr
şi aplicând teorema Stokes:
∫ ∫∫ ⋅=⋅l S
dSnErotldErrrr
Din egalarea ultimilor două relaţii obţinem:
dt
BErot
rr ∂
−= (dt
BE
rr ∂
−=×∇ ) (5.68)
Această relaţie reprezintă forma locală a legii inducţiei electromagnetice şi exprimă
caracterul rotaţional al câmpului electrodinamic. Astfel, un câmp magnetic variabil se
înconjoară întotdeauna cu linii închise de câmp electric. Prin aceasta se deosebeşte câmpul
electrodinamic de câmpul electrostatic al sarcinilor fixe, ale cărui linii de câmp sunt
deschise. Deci, câmpul electric poate fi irotaţional ( 0=Erotr
), ca în cazul câmpului
electrostatic, cât şi rotaţional (dt
BErot
rr ∂
−= ), ca în cazul câmpului electrodinamic. Câmpul
magnetic are în schimb întotdeauna un caracter rotaţional.

162
5.3.6. Autoinducţia. Energia câmpului magnetic
Să considerăm că într-un circuit închis s-a stabilit curentul I. Prin suprafaţa limitată
de circuit va exista un flux magnetic )(IΦ . Când curentul din circuit capătă o variaţie dI,
fluxul magnetic variază cu dΦ . Se defineşte inductanţa circuitului astfel:
dI
dL
Φ=
Unitatea de masură pentru inductanţă în S.I. este henry (H); 1H = sA
sV
A
Wb⋅Ω=
⋅=
Pornind de la definiţia inductanţei legea lui Faraday se poate scrie:
dt
dILi −=ε
Această relaţie este o formă particulară a legii inducţiei electromagnetice, numită şi legea
autoinducţiei, iar iε se numeşte în acest caz tensiune autoindusă.
Fie un circuit a carui inductanţă este L, prin care circulă un curent i(t)= dtdq / . În
circuit va apare o tensiune autoindusă dt
diLi −=ε . Pentru deplasarea sarcinilor electrice
prin circuit este necesară efectuarea unui lucru mecanic:
d = Lididt
dqLdidq
dt
diLdqi −=−=−=⋅ε
Considerând ca i ],0[ I∈ prin integrare se obţine lucrul mecanic total:
∫ −=−=I
ILLidi
0
2
2
Ştiind că: = magW∆ , unde Wmag reprezintă energia câmpului magnetic din jurul
circuitului când în circuit s-a stabilit un curent I, rezultă că = Wmag. - Wmag. iniţial =
Wmag. (deoarece curentul iniţial în circuit era zero şi deci Wmag. iniţial =0).
Deci energia câmpului magnetic se calculează cu ajutorul formulei:

163
Wmag. = 2
2IL (5.69)
Pentru o bobină cu N spire, de lungime l şi cu aria secţiunii unei spire S, utilizând
legea lui Faraday, inductanţa se poate calcula astfel:
dt
dI
l
SN
dt
l
NId
NSdt
BSdN
dt
dNi
2)()(
µµ
ε −=−=−=Φ
−=
Confruntând această ultimă relaţie cu legea autoinducţiei, rezultă formula de calcul
a inductanţei unei bobine:
l
SNL
2
µ=
Introducând acestă ultimă relaţie în relaţia (5.69) obţinem pentru energia câmpului
magnetic:
Wmag = µ
µµ
µ2
)(222
222
22 BV
l
NISlI
l
SNIL ===
unde V = Sl este volumul din interiorul bobinei.
Definim densitatea de energie a câmpului magnetic din interiorul bobinei ca fiind
energia câmpului magnetic din unitatea de volum: wmag = Wmag/V. Deci densitatea de
energie a câmpului magnetic este data de relaţia:
wmag = µ2
2B sau wmag= 2
2
1Hµ (5.70)
unde HBrr
µ= este o relaţie de material, iar Hr
este vectorul intensiatea câmpului magnetic.
Dacă energia câmpului magnetic nu este distribuită uniform în spaţiu atunci se scrie
densitatea de energie dintr-un volum elementar:
dVB
dVwdW magmag µ2
2
==
164
iar energia totală a câmpului magnetic se calculează cu ajutorul integralei:
∫∫∫=V
dVB
Wµ2
2
5.3.7. Curentul de deplasare. Inducţia magnetoelectrică
Legea de conservare a sarcinilor electrice exprimată prin ecuaţia de continuitate :
0=∂
∂+
tidiv
ρr, conduce la o dificultate în cazul curenţilor nestaţionari.
Am arătat în capitolele anterioare că în cazul câmpului magnetic, datorită faptului
că nu avem surse, întotdeauna este valabilă ecuaţia:
0=Bdivr
(5.71)
De asemenea am arătat că în cazul magnetostaticii este valabilă legea Ampère,
care în forma locală are următoarea expresie:
iBrotrr
µ= (5.72)
Aspectul particular al acestei ultime ecuaţii poate fi dovedit uşor printr-o
confruntare cu ecuaţia de continuitate.
Dacă în relaţia (5.72) aplicăm operatorul divergenţă ambilor membri se obţine:
idivBrotdivrr
µ=)(
dar cum 00)( =⇒= idivBrotdivrr
Acest rezultat este însă în contradicţie cu ecuaţia de continuitate în cazul curenţilor
nestaţionari: t
idiv∂
∂−=
ρr. Această contradicţie a fost rezolvată de catre Maxwell, care a
postulat un termen suplimentar t
D
∂
∂r
, unde Dr
reprezintă inducţia câmpului electric. Astfel,
în cazul curenţilor nestaţionari, în legea Ampère trebuie considerat în locul lui ir
, curentul
165
total dt
Diit
rrr ∂+= , care este constituit din doi curenţi: i
r- curentul de conducţie şi
t
D
∂
∂r
-
curentul de deplasare ( tir
, ir
, dir
sunt de fapt densităţile de curent). Deci, curentul de
deplasare dir
este egal cu viteza de variaţie a inducţiei electrice:
t
Did ∂
∂=
rr
În această situaţie ecuaţia (5.72), care a fost demonstrată în cazul unui câmp
magnetostatic, trebuie completată în cazul curenţilor variabili în timp cu curentul de
deplasare:
)(t
DiBrot
∂
∂+=
rrr
µ (5.73)
care în forma integrală se poate scrie:
∫ =⋅l
ldBrr
dSnt
DdSni
SS
rr
rr⋅
∂
∂+⋅ ∫∫∫∫ µµ (5.74)
sau utilizând relaţia de material HBrr
µ= :
∫ =⋅l
ldHrr
dSnt
DdSni
SS
rr
rr⋅
∂
∂+⋅ ∫∫∫∫
Dacă în relaţia (5.73) aplicăm operatorul divergenţă ambilor membri se obţine:
0=+= dt idividividivrrr
ceea ce înseamnă că liniile curentului total trebuie să fie închise, deci, acolo unde se
termină liniile curentului de conducţie, aceste linii trebuie să se continuie cu liniile
curentului de deplasare. Aşa cum rezultă din (5.73) sau (5.74), curentul de deplasare
creează un câmp magnetic ca şi curentul de conducţie. El este o sursă de câmp magnetic
dBr
care se determină prin legea circuitului magnetic:

166
∫ =⋅l
d ldBrr
dSnt
DdSni
SS
d
rr
rr⋅
∂
∂=⋅ ∫∫∫∫ µµ (5.75)
Rezultă deci că orice câmp electric variabil, indiferent dacă este în vid, într-un mediu
dielectric sau într-un conductor, creează un curent de deplasare şi deci, un câmp magnetic.
Fenomenul de inducere a unui câmp magnetic (variabil) de către un câmp electric
variabil se numeşte inducţie magnetoelectrică.
Pentru câmpurile electrice care variază lent în timp (cvasistaţionare, de frecvenţă
joasă) curenţii de deplasare sunt mici. În cazul proceselor cu variaţie rapidă în timp (de
înaltă frecvenţă), curenţii de deplasare au valori mari şi nu pot fi neglijaţi în comparaţie cu
curenţii de conducţie.
În concluzie, curentul de deplasare există oriunde există un câmp electric variabil
în timp, deci el există şi în interiorul conductorilor parcurşi de curent electric variabil însă
are valori mult mai mici decât curentul de conducţie. Curentul de deplasare creează în
jurul lui un cîmp magnetic la fel ca şi curentul de conducţie. Deosebirea esenţială între
curentul de conducţie şi curentul de deplasare constă în faptul că în timp ce curentul de
conducţie corespunde mişcării unor sarcini electrice, curentul de deplasare în vid se
datoreşte doar variaţiei câmpului electric, ca atare el nu este însoţit de o degajare de
caldură.
5.3.8. Câmpul electromagnetic. Ecuaţiile Maxwell
Curentul de deplasare creează în jurul său un câmp magnetic. Deoarece curentul de
deplasare este generat de variaţia câmpului electric ( 0≠∂
∂
t
Dr
), rezultă că o variaţie în timp
167
a câmpului electric generează un câmp magnetic. Dar, un câmp electric variabil, creează
un curent de deplasare variabil şi în consecinţă un câmp magnetic variabil.
Astfel, spaţiul ocupat de un câmp electric variabil este ocupat în acelaşi timp şi de
un câmp magnetic variabil.
Pe de altă parte, ştim că un câmp magnetic variabil produce un câmp electric.
Practic, avem întotdeauna câmpuri magnetice variabile în care variază nu doar Br
, ci şi
t
B
∂
∂r
, şi în acest caz câmpul electric produs este de asemenea variabil. Deci, spaţiul ocupat
de un câmp magnetic variabil este ocupat simultan şi de un câmp electric variabil.
Ambele câmpuri, electric şi magnetic, sunt deci într-o interconexiune, generându-
se reciproc şi alcătuind câmpul electromagnetic. Starea câmpului electromagnetic este
definită de vectorul intensitatea câmpului electric Er
şi de vectorul inducţia câmpului
magnetic Br
, respectiv, prin intermediul relaţiilor de material, de catre Dr
şi Hr
. Aceste
mărimi sunt legate între ele printr-un sistem complet de ecuaţii liniare cu derivate parţiale
care determină starea câmpului electromagnetic în fiecare punct al câmpului şi care se
numesc ecuaţiile Maxwell. Sistemul ecuaţiilor Maxwell este considerat sistemul de
ecuaţii fundamental al electrodinamicii. Recapitulăm acest sistem de ecuaţii care
înglobează toate fenomenele electromagnetice studiate în capitolele anterioare:
a) Forma integrală a ecuaţiilor Maxwell
∫ =⋅l
ldHrr
dSnt
DdSni
SS
rr
rr⋅
∂
∂+⋅ ∫∫∫∫ - ecuaţia Maxwell-Ampère pentru legea circuitului
magnetic
∫ ∫∫ ⋅∂
∂−=⋅
l S
dSnt
BldE
rr
rr - ecuaţia Maxwell –Faraday pentru legea inducţiei
electromagnetice

168
∫∫∫∫∫ =⋅VS
dVdSnD ρrr
- legea lui Gauss pentru fluxul electric
0=⋅∫∫S
dSnBrr
- legea lui Gauss pentru fluxul magnetic
b) Forma locală a ecuaţiilor Maxwell
t
DiHrot
∂
∂+=
rrr
dt
BErot
rr ∂
−=
ρ=Ddivr
0=Bdivr
Luând aceste ecuaţii drept postulate, cu ajutorul lor pot fi stabilite legile şi relaţiile
întâlnite în diferite domenii ale electricităţii şi magnetismului. Mulţimea fenomenelor
electrice, magnetice şi electromagnetice se supun acestor ecuaţii. De la forma generală a
acestor ecuaţii se poate trece uşor la formele particulare, proprii diferitelor domenii ale
electromagnetismului.
Studiul fenomenelor electromagnetice implică şi cunoaşterea proprietăţilor
mediului, proprietăţi care apar explicit în relaţiile de material impuse de polarizarea
electrică şi magnetică:
HB
EDrr
rr
µ
ε
=
=
la care se adaugă în cazul mediilor conductoare legea lui Ohm: Eirr
σ=

169
5.4. Unde electromagnetice
5.4.1. Ecuaţia undelor electromagnetice
Din teoria câmpului electromagnetic a lui Maxwell decurge proprietatea de
propagare a câmpului electromagnetic sub forma undelor electromagnetice. Dacă un câmp
electromagnetic este creat într-o regiune oarecare, limitată a spaţiului, el se propagă în
restul spaţiului cu o viteză finită. Pentru a demonstra această afirmaţie în modul cel mai
simplu, vom considera cazul particular al unui mediu omogen, izotrop şi fară sarcini
electrice distribuite în volum, adică: ε = constant, µ = constant (mediu omogen şi izotrop),
ρ = 0 (absenţa sarcinilor libere). Considerăm de asemenea că în acel mediu nu există
curenţi de conducţie ( 0=ir
).
Cu aceste condiţii ecuaţiile lui Maxwell devin:
dt
BErot
rr ∂
−=
0=Bdivr
t
DHrot
∂
∂=
rr
sau t
EBrot
∂
∂=
rr
εµ
0=Ddivr
sau 0=Edivr
Aplicând operatorul rotor primei ecuaţii se obţine:
)Brot(t
)t
B(rot)Erot(rot
rr
r
∂
∂−=
∂
∂−=
Substituind Brotr
prin expresia dată de cea de a treia ecuaţie putem scrie:
2
2
t
E)Erot(rot
∂∂
−=
rr
εµ
sau scris cu ajutorul simbolului nabla “∇ ”:

170
2
2
t
EE
∂∂
−=×∇×∇
rr
εµ (5.76)
Aplicând regula de efectuare a produsului dublu vectorial:
EEErrr
2)( ∇−⋅∇∇=×∇×∇
şi folosind a patra ecuaţie Maxwell: 0==⋅∇ EdivErr
, iar EErr
∆=∇ 2 (operatorul lui
Laplace), relaţia (5.76) devine:
0t
EE
2
2
=∂∂
−
rr
εµ∆
sau explicitând operatorul Laplace:
0t
E
z
E
y
E
x
E2
2
2
2
2
2
2
2
=∂∂
−∂∂
+∂∂
+∂∂
rrrr
εµ (5.77)
care reprezintă ecuaţia diferenţială a undelor electromagnetice, în care variabilă în timp
şi spaţiu este intensitatea câmpului electric.
Printr-o demonstraţie asemănătoare, pornind de la treia ecuaţie Maxwell şi folosind
ecuaţiile unu şi doi se poate scrie o ecuaţie diferenţială a undelor electromagnetice de
forma:
0t
B
z
B
y
B
x
B2
2
2
2
2
2
2
2
=∂∂
−∂∂
+∂∂
+∂∂
rrrr
εµ (5.78)
în care variabilă în timp şi spaţiu este inducţia câmpului magnetic
Dacă comparăm relaţiile (5.77) şi (5.78) cu ecuaţia generală a undelor, cunoscută
de la capitolul de oscilaţii şi unde elastice:
0tv
1
zyx 2
2
22
2
2
2
2
2
=∂∂
−∂∂
+∂∂
+∂∂ ΨΨΨΨ
rezultă că viteza de propagare a undelor electromagnetice este dată de relaţia:
vεµ
1=

171
Astfel, din sistemul ecuaţiilor lui Maxwell, rezultă că atât câmpul electric cât şi
câmpul magnetic nu sunt localizate în spaţiu, ci se propagă sub formă de unde cu aceeaşi
viteză εµ
1. Deci, cele doua componente, electrică şi magnetică, se propagă simultan în
spaţiu, coexistă în fiecare punct din spaţiu şi reprezintă unda electromagnetică.
În cazul propagării în vid, obţinem:
v 8
00
1031
⋅===µε
c m/s
care este egală cu valoarea vitezei luminii în vid.
Acest rezultat deosebit de interesant al teoriei electromagnetice a condus la
concluzia că lumina reprezintă o undă electromagnetică.
5.4.2. Proprietăţile undelor electromagnetice
a) Transversalitatea undelor electromagnetice
Ecuaţia undelor electromagnetice admite ca soluţie, şi soluţia ecuaţiei undei plane,
deoarece la distanţă mare de sursă o porţiune dintr-o undă sferică poate fi considerată
practic plană. Deci soluţia ecuaţiei unelor electromagnetice care se propagă pe o singură
direcţie este de tipul soluţiei unei unde plane:
)sin(0 kxtEE −= ωrr
)sin(0 kxtBB −= ωrr
sau sub formă complexă, şi alegând de asemenea axa Ox drept direcţie de propagare:
)(0
kxtieEE
−= ωrr
)(0
kxtieBB
−= ωrr (5.79)

172
unde k este numărul de undă, cu k=ω v, iar 0Er
, 0Br
reprezintă amplitudinea constantă,
independentă de coordonate, a mărimilor vectoriale Er
şi respectiv Br
. Din sistemul
ecuaţiilor lui Maxwell alegem ecuaţiile:
0=⋅∇ Er
( )0=Edivr
0=⋅∇ Br
( )0=Bdivr
(5.80)
Operatorul divergenţă aplicat funcţiilor din (5.79) se reduce la expresia:
∇ = kz
jy
ix
rrr
∂
∂+
∂
∂+
∂
∂ = - (ik) i
r⋅ (5.81)
unde ir
este versorul direcţiei de propagare Ox, iar i este unitatea imaginară. Considerând o
direcţie de propagare arbitrară de versor nr
, conform (5.81) avem:
nikr
−=∇ (5.82)
şi deci ecuaţiile (5.80) se scriu:
0
0
=⋅−=⋅∇
=⋅−=⋅∇
BnikB
EnikErrr
rrr
din care rezultă că Er
şi Br
sunt perpendiculari pe nr
, deci pe direcţia de propagare a undei.
Am arătat astfel ca undele electromagnetice sunt unde transversale.
b) O altă proprietate importantă a undelor electromagnetice este că Er
şi Br
sunt
perpendiculari între ei şi împreună cu nr
alcătuiesc un triedru drept.
Considerăm ecuaţia:
t
BE
∂
∂−=×∇
rr
(5.83)
şi calculăm derivata în raport cu timpul a lui Br
(din ecuaţia 5.79):
Bikxti
eiBt
B rr
ωωω =−⋅=∂
∂ )(0

173
Se observă că operaţia de derivare în raport cu timpul se reduce la înmulţirea
funcţiei respective cu )( ωi .
Ţinând cont de această menţiune cât şi de (5.82), ecuaţia (5.83) se scrie sub forma:
BiEnikrrr
ω−=×−
dar ştiind că ω = kv, se obţine:
=×Enrr
v Br
(5.84)
din care rezultă pe de o parte că Er
şi Br sunt perpendiculari unul pe celălalt şi pe de altă
parte, că cei trei vectori nr
, Er
şi Br
sunt perpendiculari între ei şi alcătuiesc un triedru
drept.
Întrucât, EEn =×rr
, din (5.84) rezultă:
=B
Ev sau E =
εµ
H , unde B = µ H (5.85)
deci E şi B (respectiv E şi H) se află într-un raport constant, ceea ce înseamnă că cei doi
vectori au aceeaşi fază, variază sincron atingând simultan valorile maxime şi minime.
5.4.3. Energia transportată de undele electromagnetice
Una din proprietăţile importante ale undelor electromagnetice este aceea că unda
electromagnetică transportă energie şi această energie este evident conţinută în câmpurile
electric şi magnetic. Pornind de la relaţiile densităţiilor de energie ale câmpului electric şi
respectiv magnetic, deduse în capitolele anterioare, densitatea de energie totală va fi dată
de suma celor două densităţii de energie:
w µ
ε2
2
2
1
2
1 BE += sau w 22
2
1
2
1HE µε += (5.86)

174
Ţinând cont că pentru undele electromagnetice este valabilă relaţia: E = εµ
H
densitatea energiei totală devine:
w = 222
2
1
2
1HHH µµµ =+
adică, densitatea energiei electrice a undei electromagnetice este egală cu densitatea
energiei magnetice, iar densitatea totală este deci de doua ori mai mare decât densitatea de
energie a fiecăreia din cele două componente ale câmpului electromagnetic:
w = 22 HE µε =
Intensitatea undei electromagnetice adică, energia care trece în unitatea de timp,
prin unitatea de suprafaţă perpendiculară pe direcţia de propagare, este egală cu produsul
dintre viteza undei şi densitatea totală de energie:
I ==dt
dW
S
1vw= 221
EEµε
εεµ
=
fiind deci direct proporţională cu pătratul amplitudinii oscilaţiei vectorului electric. Ţinând
cont de relaţia (5.85), relaţia de mai sus devine:
I = HE ⋅ = PHErrr
=×
Vectorul HEPrrr
×= , numit vectorul Poynting, este egal în modul cu intensitatea
undei electromagnetice şi este orientat în sensul direcţiei de propagare a undei
electromagnetice (are sensul vectorului nr
).
Modulul vectorului Poynting este deci egal cu energia transportată de unda
electromagnetică în unitatea de timp, prin unitatea de suprafaţă perpendiculară pe
direcţia de propagare.

175
Ne propunem în continuare să calculăm variaţia în timp a energiei electromagnetice W care
se află în interiorul unui volum V, mărginit de o suprafaţă S.
Pentru acest lucru vom porni de la relaţia:
∫∫∫=V
wdVW
unde w reprezintă densitatea energiei totale a câmpului electromagnetic.
Derivând această relaţie în raport cu timpul, obţinem:
∫∫∫ ∂∂
=∂
∂
V
dVt
w
t
W (5.87)
Din (5.86) rezultă:
t
HH
t
EE
t
w
∂
∂+
∂
∂=
∂
∂r
rr
rµε
în care introducând pentru derivatele t
E
∂
∂r
şi t
B
∂
∂r
expresiile corespunzătoare din ecuaţiile
lui Maxwell se obţine:
EEit
w rrr(+⋅−=
∂
∂ HHrot
rr− Erot
r)
sau: )( HEdivEit
w rrrr×−⋅−=
∂
∂ (5.88)
(s-a folosit ecuaţia cunoscută din analiza vectorială: BBAdivrrr
=× )( AArotrr
− Brotr
)
Introducând (5.88) în (5.87) şi aplicând teorema Gauss-Ostrogradski se găseşte:
∫∫∫ ∫∫ ⋅×+⋅=∂
∂−
V S
dSnHEdVEit
W rrrrr)(
sau: ∫∫∫ ∫∫ ⋅+=∂
∂−
V S
dSnPdVEt
W rr2σ (5.89)
Ecuaţia (5.89) exprimă tocmai variaţia în timp a energiei electromagnetice W care se află
în interiorul unui volum V, mărginit de o suprafaţă S.
176
Scăderea energiei electromagnetice din volumul V considerat, este egală cu
energia disipată prin efect termic (efect Joule) plus energia transportată de undele
electromagnetice prin suprafaţa S care mărgineşte volumul V.
5.4.4. Spectrul undelor electromagnetice
Undele electromagnetice acoperă un domeniu foarte larg de frecvenţe sau de
lungimi de undă (104 m ÷ 10-14 m).
Rezumăm aici clasificarea uzuală a spectrului electromagnetic:
1. Unde herţiene (unde radio) ≅λ 104 ÷ 100 m
2. Microunde ≅λ 100 ÷ 10-3 m
3. Infraroşii ≅λ 10-3 ÷ 10-7 m
4. Vizibil ≅λ 8.10-7 ÷ 4.10-7 m
5. Ultraviolet ≅λ 4.10-7 ÷ 10-8 m
6. Raze X şi raze γ ≅λ 10-8 ÷ 10-14 m
Undele herţiene, microunde, infraroşii, vizibile şi ultraviolete iau naştere la
tranziţia electronilor de la periferia atomului între stări energetice vecine. Aceste tipuri de
unde sunt produse fie în instalaţii electronice (circuite oscilante LC, cavităţi rezonante) fie
de către corpurile încălzite. Undele radio se clasifică în: unde lungi (30 km ÷ 750 m), unde
medii (750 ÷ 50 m), unde scurte (50 ÷ 10 m) şi unde ultrascurte (10 m ÷ 30 cm).
Razele X sunt unde electromagnetice penetrante care iau naştere când electronii din
păturile interne, mai apropiate de nucleu, trec în pături mai profunde, eliberând surplusul
de energie obţinut din tranziţie (radiaţia X cu spectru de linii). De asemenea razele X mai
pot lua naştere prin frânarea electronilor puternic acceleraţi pe anticatod, proces în care
177
energia cinetică a electronilor se transferă în fotoni X (radiaţie X cu spectru continuu sau
radiaţie de frânare).
Razele γ sunt unde electromagnetice de origine nucleară. Ele se caracterizează
printr-o energie foarte mare, energie rezultată prin dezexcitarea nucleelor. Razele γ de
provenienţă cosmică, cu energie deosebit de mare, se numesc radiaţii cosmice.
Acest domeniu larg de lungimi de undă al undelor electromagnetice implică
multiple aplicaţii în tehnică şi evident mijloace de producere şi detecţie foarte diferite.

178
Capitolul 6: Optica
6.1. Elemente de fotometrie
Fotometria este partea de optică în care se studiază intensitatea surselor de radiaţii,
precum şi unele mărimi legate de această intensitate. În fotometrie, folosind ochiul
omenesc drept receptor de lumină, se caută să se măsoare efectele luminii şi să se exprime
în mod cantitativ rezultatele acestor măsurători.
O senzaţie luminoasă se poate percepe numai pentru un interval spectral limitat, şi
anume pentru radiaţii din domeniul situat aproximativ între 400 şi 780 nm. Energia radiată
în acest domeniu se numeşte radiaţie vizibilă sau lumină, în sensul obişnuit al cuvântului.
Senzaţia luminoasă depinde, pe de o parte, de valoarea fluxului de energie radiantă
(mărime reprezentând energia emisă de sursa de lumină în unitatea de timp) care cade pe
un element fotosensibil al retinei, pe de altă parte, de lungimea de undă a radiaţiei
recepţionate. Componenţa dupa lungimi de undă a unei radiaţii condiţionează culoarea
acesteia. Ochiul este un receptor care are sensibilitate diferită pentru diferite lungimi de
undă din domeniul vizibil.
Pentru a caracteriza cantitativ dependenţa sensibilităţii ochiului de lungimea de
undă se introduce mărimea denumită sensibilitate spectrală relativă Vλλλλ.
Dacă se iluminează o suprafaţă perfect difuzantă cu lumină verde cu λ= 555 nm,
sursa de lumină având fluxul de energie radiantă constant ( v
eφ ), şi se iluminează o
suprafaţă vecină, cu aceleaşi caracteristici ca şi prima, cu o lumină de altă culoare,
constatăm că, pentru ca ochiului cele două suprafeţe să pară la fel de luminoase este nevoie
ca fluxul de energie radiantă al acestei surse ( λφe ) sa crească mult peste cel al sursei de
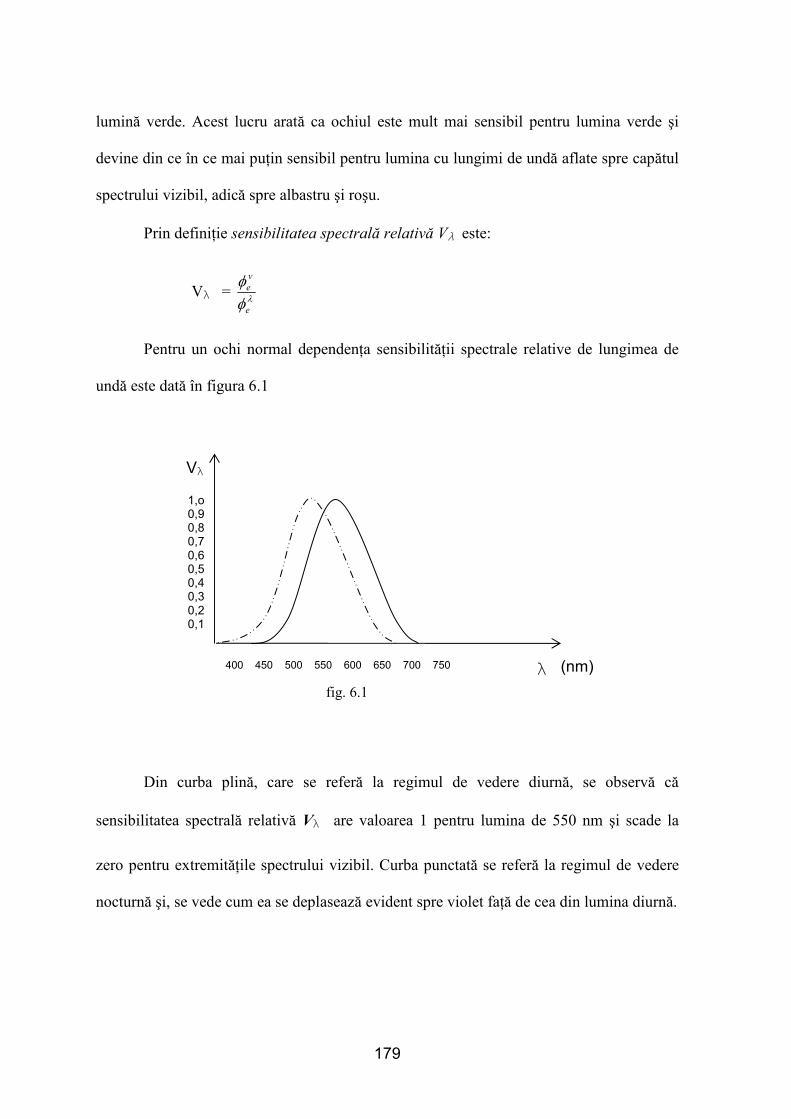
179
lumină verde. Acest lucru arată ca ochiul este mult mai sensibil pentru lumina verde şi
devine din ce în ce mai puţin sensibil pentru lumina cu lungimi de undă aflate spre capătul
spectrului vizibil, adică spre albastru şi roşu.
Prin definiţie sensibilitatea spectrală relativă Vλλλλ este:
Vλλλλ = λφφ
e
v
e
Pentru un ochi normal dependenţa sensibilităţii spectrale relative de lungimea de
undă este dată în figura 6.1
Din curba plină, care se referă la regimul de vedere diurnă, se observă că
sensibilitatea spectrală relativă Vλλλλ are valoarea 1 pentru lumina de 550 nm şi scade la
zero pentru extremităţile spectrului vizibil. Curba punctată se referă la regimul de vedere
nocturnă şi, se vede cum ea se deplasează evident spre violet faţă de cea din lumina diurnă.
Vλλλλ
λλλλ
1,o 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1
(nm) 400 450 500 550 600 650 700 750
fig. 6.1

180
6.1.1. Mărimi şi unităţi fotometrice
Pentru caracterizarea numerică a rezultatelor măsurătorilor fotometrice în
fotometrie se foloseşte un sistem propriu de mărimi fizice şi de unităţi de masură, care este
un sistem biofizic (fiziologic), legat de sistemul de mărimi energetice prin intermediul
sensibilităţii spectrale relative a ochiului uman.
1. Fluxul luminos φ
Dacă fluxul energetic radiant al sursei de lumină este monocromatic, cu lungimea
de undă λ , atunci se defineşte fluxul luminos monocromatic corespunzător:
λλλ φφ eKV=
unde K este echivalentul fotometric al radiaţiei, mărime care în cazul vederii diurne are
valoarea 683 lm/W.
Dacă fluxul energetic radiant al sursei de lumina este complex, adică este suma
unor fluxuri radiante monocromatice, atunci fluxul luminos corespunzător este:
λλφφ eVK∑=
Dacă, la descompunerea spectrală, fluxul radiant are un spectru continuu între două
lungimi de undă 1λ şi 2λ , atunci fluxul luminos va fi dat de relaţia:
12
)(2
1
λλ
λλφ
φ
λ
λλ
−=
∫ dV
K
e
Unitatea de măsură a fluxului luminos este lumenul (lm).
2. Intesitatea luminoasă I

181
Intensitatea luminoasă a unei surse punctiforme de lumină într-o direcţie dată, se
defineşte ca fiind egală cu raportul dintre fluxul luminos emis în unghiul solid elementar
din jurul acelei direcţii şi valoarea acelui unghi solid:
Ω
=d
dI
φ
Unitatea de măsură a intensitaţii luminoase este candela (cd). Ea este o unitate
fundamentală a sistemului internaţional de unităţi de măsură.
3. Luminanţa L
Luminanţa unei surse de lumină într-un punct al său şi într-o direcţie dată, care
formează cu normala la suprafaţă în acel punct unghiul θ este:
Ω
=ddS
dL
θφ
cos
2
unde φd este fluxul luminos emis în unghiul solid Ωd , dS este aria elementului de
suprafaţă a sursei ( θcosdS este aria aparentă, egală cu proiecţia elementului de suprafaţă
dS pe planul normal pe direcţia de observare).
Există şi o altă relaţie de definţie echivalentă, des utilizată în fotometrie:
θcosdS
dIL =
unde dI este intensitatea luminoasă a sursei de lumină în punctul dat şi în direcţia
considerată.
Unitatea de măsură pentru luminanţă este cd/m2 sau, cu denumirea anterioară, nit (nt).
În general luminanţa unei surse depinde de direcţia de observaţie. Sursele de lumină a
căror luminanţă nu depinde de direcţia de observaţie se numesc surse perfect difuzante.
4. Iluminarea E
Iluminarea unei suprafeţe, într-un punct dat, este raportul dintre fluxul luminos
primit de o suprafaţă elementară din jurul acelui punct şi aria suprafeţei:

182
dS
dE
φ=
sau ţinând cont de definiţia intensităţii luminoase I:
ir
IE cos
2=
unde r este distanţa de la sursa de lumină până la punctul în care calculăm iluminarea, iar i
este unghiul de incidenţă al luminii pe suprafaţă.
Unitatea de măsură pentru iluminare este luxul (lx).
5. Emitanţă (exitanţă) luminoasă M
Emitanţa luminoasă a unei surse întinse, într-un punct al sau, este raportul dintre
fluxul luminos emis de către un element de suprafaţă din jurul acelui punct şi aria acelui
element de suprafaţă:
dS
dM
φ=
Unitatea de măsură a emitanţei este lm/m2.
În cazul corpurilor perfect difuzante între emitanţa si luminanţa sursei de lumină
există relaţia:
M = π L
6. Eficacitatea luminoasă η
Eficacitatea luminoasă a unei surse este raporul dintre fluxul lumins emis de o
sursă şi puterea consumată de aceasta:
P
φη = (unitatea de măsură este lm/W)
Lămpile cu incandescenţă au eficacitatea luminoasă cuprinsă între 7 şi 18 lm/W
pentru puteri cuprinse între 25 şi 1000 W, în timp ce lămpile cu descărcari în gaze ajung la
eficacităţi de circa 50 lm/W. Mărimile forometrice se măsoară cu aparte optice numite
183
fotometre. Fotometrul Lummer –Brodhun este unul din cele mai utilizate fotometre. De
asemenea se fac frecvent masurători fotometrice şi cu sfera intergratoare Ulbricht.
6.2. Optica geometrică
6.2.1. Legile fundamentale ale opticii geometrice
Aşa cum este cunoscut din electromagnetism, propagarea luminii constă în
propagarea unei unde electromagnetice cu lungimea de undă cuprinsă între 400 şi 780 nm.
Asupra unor receptori (ochi, emulsie fotografică, etc.) lumina acţionează prin intermediul
câmpului electric al undei electromagnetice. Totuşi multe dintre fenomenele optice pot fi
înţelese şi numeroase instrumente optice pot fi concepute fară a fi nevoie să se ţină seama
de natura electromagnetică a luminii.
La baza opticii geometrice stă conceptul de rază de lumină - înţeleasă ca un
fascicul de lumină cât se poate de îngust. Optica geometrică s-a constituit pe baza unor
observaţii calitative referitoare la razele de lumină şi a unor relaţii cantitative referitoare la
parcursul razelor de lumină.
Aceste observaţii şi relaţii le vom denumi legile fundamentale ale opticii geometrice.
1. Legea propagării rectilinii a luminii: Într-un mediu omogen şi izotrop lumina se
propagă în linie dreaptă.
2. Legea independenţei mersului razelor de lumină: Dacă mai multe raze de lumină se
întâlnesc în acelaşi punct ele nu se influenţeză reciproc, parcursul şi intensitatea lor
ramânând neschimbate.
3. Legea reversibilităţii mersului razelor de lumină: Mersul unei raze de lumină este
independent de sensul de propagare.

184
4. Legile reflexiei: daca o rază de lumină ajunge la suprafaţa de separare a două medii
transparente diferite, o parte din lumină se întoarce din mediul din care a venit, adică se
reflectă, iar altă parte se refractă, adică pătrunde în al doilea mediu schimbându-şi direcţia
de propagare.
Legile reflexiei stabilite experimental încă din antichitate sunt:
1. Raza incidentă, raza reflectată şi normala în punctul de incidenţă sunt în acelaşi
plan, numit plan de incidenţă.
2. Unghiurile de incidenţă i si de reflexie r sunt egale ca mărime, razele incidentă şi
reflectată fiind situate de cele două parţi ale normalei în punctul de incidentă.
5. Legile refracţei sunt:
1. Raza incidentă, raza refractată si normala în punctul de incidenţă sunt în acelaşi
plan, numit plan de incidenţă.
2. Legea a doua a refracţiei conduce la stabilirea direcţiei razei refractate şi se
exprimă prin relaţia:
n1sin i = n2 sin r
unde n1 şi n2 sunt indicii de refracţie absoluţi (sau simplu spus, indici de refracţie) ai
mediilor 1 şi 2 prin care trece lumina; i este unghiul de incidenţă şi r unghiul de refracţie.
Atât i cât şi r se măsoară faţă de normala care trece prin punctul de incidenţă.
Legea a doua a refracţiei a fost stabilită abia în secolul XVII-lea de Snellius (1626),
relaţia respectivă fiind publicată ulterior de către Descartes (1637) şi de aceea ea este
cunoscută si sub numele de relaţia Snellius – Descartes.
Legile reflexiei cât şi legile refracţiei, stabilite iniţial experimental, pot fi uşor
deduse cu ajutorul principiului lui Fermat:
“Drumul real parcurs de lumină între două puncte fixate este acela pentru care timpul de
propagare a luminii între aceste puncte este minim „

185
Se poate considera o rază de lumină care se reflectă sau se refractă, se calculează
distanţa dintre cel două puncte din considerente geometrice, iar cu ajutorul principiului lui
Fermat se pune condiţia ca între cele două puncte prin care trece lumina timpul de
propagare să fie minim, adică derivata distanţei dintre cele două puncte la timp sa fie nulă.
În urma acestor calcule vom obţine tocmai legile reflexiei şi refracţiei.
6.2.2. Reflexia totală a luminii. Fibre optice
Reflexia totală a luminii se poate produce la limita de separare a două medii cu
indici de refracţie diferiţi, atunci când indicile de refracţie al celui de-al doilea mediu este
mai mic decât al primului. În aceste condiţii raza refractată se departează de normală,
existând un unghi de inchidenţă pentru care unghiul de refracţie devine 90o. Numim acest
unghi, unghi limită (l). Unghiul limită se calculează cu relaţia:
sin l = n2 /n1
La incidenţa luminii peste unghiul limită, întreg fasciculul de lumină suferă doar reflexie,
acest fenomen fiind denumit reflexie totală.
Fibrele optice reprezintă o importantă aplicaţie, bazată pe fenomenul reflexiei
totale a luminii. Dacă lumina pătrunde într-o bară dintr-un mediu transparent cu indicele
de refracţie mai mare decât al mediului înconjurător, ea poate suferi o serie de reflexii
totale astfel încât fasciculul de lumină urmăreşte curburile barei fară ca lumina să poată
ieşi din ea. Un conductor de lumină poate fi constituit dintr-un mănunchi de fibre optice
subţiri. Fiecare fibră constă dintr-un miez mai refringent şi un înveliş exterior mai puţin
refringent. Acest lucru se realizează prin introducerea unei bare subţiri de sticlă într-un tub
de sticlă mai puţin refringent. Prin încălzire sticlele se înmoaie şi diametrul barei acoperite
poate fi redus la câţiva micrometri. Un mănunchi de astfel de fibre sudate între ele prin-o
nouă înmuiere la cald poate conduce la realizarea unui conductor de lumină subţire,

186
flexibil şi totuşi suficient de rezistent. Un astfel de conductor poate dirija lumina pe un
traseu curbat, cu foarte mici pierderi de intensitate a luminii. Progresele recente au dus la
obţinerea de fibre optice suficient de pure şi omogene care au permis realizarea de cabluri
optice folosite pentru comunicaţii de date la mare distanţă, chiar intercontinentale. De
asemenea fibrele optice au devenit indispensabile în anumite tehnici medicale.
6.2.3. Aproximaţia gaussiană
Optica geometrică s-a dezvoltat în principal pe baza cecetărilor având drept scop
realizarea de instrumente optice din ce în ce mai perfecţionate, capabile sa furnizeze
imaginile unor obiecte la care să se poată distinge cât mai multe detalii. Evident s-a
urmărit obţinerea de imagini cât mai clare şi mai asemănatoare obiectelor observate.
Întrucât imaginea unui obiect reprezintă juxtapunerea imaginilor porţiunilor infinit
de mici care alcătuiesc obiectul, claritatea acesteia ar putea fi perfectă dacă imaginea unui
punct al obiectului ar fi de asemenea punctiformă. Un sistem optic care satisface această
condiţie se numeşte stigmatic, iar punctul obiect şi punctul imagine se numesc puncte
conjugate.
Cele mai simple sisteme optice sunt oglinda (o suparafaţă reflectatoare) şi dioptrul
(suprafaţa de separare dintre două medii cu indici de refracţie diferiţi).
Deşi aceste sisteme optice sunt simple, nici prin aceste sisteme imaginea unui punct
nu este total stigmatică decat în anumite condiţii. Orice abatere de la stigmatism o numim
“aberaţie”. Aceste aberaţii sunt de doua tipuri: geometrice si cromatice. Cele geometrice
constituie abateri de la stigmatism în lumină monocromatică, ele se datorează formei şi
lărgimii fascicului de lumină, pe când cele cromanice apar datorită dependenţei indicelui
de refracţie de lungimea de undă a luminii.

187
În anumite condiţii un sistem optic real poate forma o imagine aproximativ
stigmatică. Cel mai important caz de stigmatism aproximativ, sau apropiat, apare în cazul
formării imaginii cu raze de lumină foarte apropiate de axa optică, paraxiale. Aceasta
aproximaţie este numită aproximaţia paraxială sau aproximatia gaussiană.
În paragrafele următoare vom preciza în ce condiţii se poate obţine un stigmatism
aproximativ acceptabil în cazul dioptrilor sferici cât şi în cazul oglinzilor sferice.
6.2.4. Dioptrul sferic. Dioptrul plan
Suprafaţa sferică este suprafaţa cea mai uşor de confecţionat cu suficientă precizie
pentru a se realiza piesele optice, numite lentile, din care se confecţionează sistemele
optice. Două medii cu indicii de refracţie diferiţi, separaţi printr-o suprafaţă sferică,
formează sistemul optic cel mai simplu. Acest sistem optic poartă numele de dioptru
sferic. El se caracterizează prin: raza dioptrului R – raza suprafeţei sferice; centrul
dioptrului C – centrul suprafeţei sferice; vârful dioptrului V- este centrul calotei sferice a
dioptrului; axa principală a dioptrului CV – axa care uneşte vârful cu centrul dioptrului;
indicii de refracţie n1 şi n2 ai celor două medii omogene şi izotrope care mărginesc
dioptrul. Orice dreaptă care trece prin centrul dioptrului se numeşte axă optică secundară.
Sistemele optice sunt formate în cazul general din mai mulţi dioptri sferici.
Când raza dioptrului tinde la ∞ , dioptrul sferic devine un dioptru plan.
La un dioptru sferic vom distinge un spaţiu obiect, care reprezintă spaţiul în care se
găseşte obiectul, cât şi spaţiul imgine, care reprezintă spaţiul în care se formează imaginea.
Distanţa de la obiect până la vârful dioptrului o numim distanţă obiect şi o notăm cu p1, iar
pe cea de la imagine până la vârful dioptrului o numim distanţă imagine şi o notăm cu p2.
În figura 6.2 este prezentat mersul razelor de lumină prin-un dioptru sferic:

188
Ne propunem să găsim poziţia imaginii unui obiect punctiform P1 situat pe axul
optic. Considerăm raza de lumină P1I, izvorâtă din P1, care atinge dioptrul sub unghiul de
incidenţă i şi se refractă sub unghiul de refracţie r. Raza refractată intersectează axul optic
principal în punctul P2. Raza incidentă în V trece nedeviată, pentru această rază unghiurile
de incidenţă şi de refracţie sunt zero. În P2 se intersectează deci două raze izvorâte din P1.
Adoptăm următoarele notaţii:
p1 = VP1, p2 = VP2, R = VC
considerând că p1, p2 şi R reprezintă segmente dirijate cu originea în vârful dioptrului.
Adoptând un sens pozitiv în lungul axului dioptrului, mărimile p1, p2 şi R pot avea valori
pozitive sau negative, după cum sunt orientate în sensul ales drept pozitiv sau în sens opus.
Un segment de dreaptă se consideră pozitiv daca el este orientat, fată de vârful dioptrului,
în sensul de mers al luminii prin dioptru. În cazul ales (figura 6.2) lumina se propagă de la
stânga spre dreapta, înseamnă că: p1<0, p2>0, R>0.
Punctul P2 se poate consideră drept imagine a punctului luminos P1 doar în
condiţiile în care dioptrul sferic poate fi considerat un sistem optic aproximativ stigmatic.
În condiţii de stigmatism considerăm fasciculul de lumină care pleacă din P1 ca
fiind un fascicul îngust, paraxial (aproximaţia lui Gauss), deci punctul de incidenţă I se
găseşte aproape de vârful dioptrului. În aceste condiţii se pot face aproximaţiile:
P1I ≅ P1V= - p1 şi P2I ≅ P2V = p2
Aplicând teorema sinusului în triunghiurile P1IC şi P2IC obţinem:
V P1 P2 C
I
fig. 6.2

189
απ sin)sin(
11 IP
i
CP=
−
)sin(sin22
απ −=
IP
r
CP
Ţinând cont de aproximaţia lui Gauss şi de convenţia de semne, relaţiile de mai sus devin:
αsin
sin
1
1 i
p
Rp=
−
+−
αsin
sin
2
2 r
p
Rp=
−
Împarţind relaţiile de mai sus membru cu membru şi ţinând cont de legea refracţiei, după
efectuarea calculelor se obţine:
R
nn
p
n
p
n 12
1
1
2
2 −=− (6.1)
numită relaţia punctelor conjugate sau formula fundamentală a dioptrului sferic.
Conform acestei relaţii toate razele din P1 se vor intersecta după refracţie în P2, deci
putem spune că în aproximaţia opticii geometrice (aproximaţia lui Gauss) dioprul sferic
este un sistem optic stigmatic. Pentru un astfel de sistem stigmatic, constatăm că în
aproximaţia gaussiană, unui obiect plan, perpendicular pe axul optic îi corespunde o
imagine tot plană şi perpendiculară pe axul optic şi asemănătoare cu obiectul (ortoscopică).
Mărirea transversală a obiectului se defineşte ca fiind egală cu raportul dintre
mărimea imaginii şi mărimea obiectului, măsurate perpendicular pe axul optic:
1
2
y
y=β
Ţinând cont de aproximaţia opticii geometrice se poate arăta uşor că mărirea
transversală a unui dioptru sferic este dată de relaţia:
12
21
pn
pn=β (6.2)
Pentru orice dioptru sferic se pot defini focarele sale.

190
Se numeşte focar imagine F2 punctul de pe axul optic în care s-ar forma imaginea unui
obiect aşezat tot pe acest ax dar foarte îndepărtat de dioptrul sferic, practic la infinit.
Distanţa focală imagine f2 este distanţa VF2.
Analog, focarul obiect F1 este punctul de pe axul optic, în care dacă am aşeza un obiect
imaginea sa se formează practic la infinit, iar VF1, reprezintă distanţa focală obiect f1.
Conform acestor definiţii din (6.1) se obţin formulele pentru distanţele focale f1 şi
f2:
⇒−
=−R
nn
f
n 12
1
1 12
11
nn
Rnf
−−= (6.3)
⇒−
=R
nn
f
n 12
2
2 12
22
nn
Rnf
−=
Se poate arată uşor că între cele două distanţe focale există relaţia:
12
2
1
1 =+p
f
p
f
Relaţiile (6.1), (6.2), (6.3), reprezintă relaţiile dioptrului sferic.
Dioptrul sferic poate fi considerat un sistem optic stigmatic.
Pentru a obţine relaţiile dioptrului plan este suficient ca în relaţiile dioptrului sferic
(6.1), (6.2), (6.3), să introducem condiţia ca ∞→R .
Deci pentru dioptrul plan relaţiile devin:
1
1
2
2
p
n
p
n= (6.4)
1=β (6.5)
Dioptrul plan nu are focare (acestea sunt practic la infinit). Într-un dioptru plan se
formează deci o imagine dreaptă, virtuală şi egală în mărime cu obiectul, a cărei poziţie se
poate obţine din (6.4).

191
6.2.5. Oglinda sferică. Oglinda plană
Prin oglindă se înţelege o suprafaţă de formă geometrică regulată cu proprietăţi
reflectatoare puternice. În marea majoritate a cazurilor această suprafaţă este realizată prin
depunerea unui strat metalic subţire, de argint, de mercur sau de aluminiu, pe o suprafaţă
de sticlă bine şlefuită şi lustruită. După forma suprafeţei, oglinzile se împart în plane şi
curbe. Oglinzile curbe pot fi sferice, parabolice sau cilindrice. După cum suprafaţa
reflectatoare este interioară sau exterioară, oglinzile curbe se numesc concave, respectiv
convexe. O oglindă sferică este o porţiune dintr-o suprafaţă sferică reflectatoare.
Oglinzile sferice sunt de două feluri:
- oglinzi concave, la care suprafaţa reflectatoare este partea interioară a sferei
- oglinzi convexe, la care suprafaţa reflectatoare este partea exterioară a sferei
La oglinzile sferice întâlnim următoarele elemente geometrice: centrul de curbură
C, vârful oglinzii V, axul optic principal, axe secundare - elemente geometrice definite
similar cu cele pe care le-am definit la dioptrul sferic.
Relaţiile care dau poziţia şi mărimea imaginii formate de o oglindă sferică se pot
obţine din relaţiile dioptrului sferic, punând condiţia:
n2 = - n1
Din relaţiile (6.1), (6.2), (6.3), folosind condiţia de mai sus obţinem relaţiile oglinzilor
sferice:
Rpp
211
12
=+ (6.6)
1
2
p
p−=β (6.7)
Dacă ∞→1p , p2 = f2 = R/2, iar dacă ∞→2p , p1 = f1 = R/2

192
Pentru oglinda sferică cele două focare coincid, focarul comun F fiind situat pe
axul optic, la mijlocul distanţei dintre vârful V şi centrul C al oglinzii. Deci în cazul
oglinilor sferice se vorbeşte de o singură distanţă focală f :
f = R/2. (6.8)
Tinând seama de aceasta, relaţia (6.6) se transformă în relaţia mai frecvent folosită:
fpp
111
12
=+ (6.9)
Formarea imaginilor în oglinzile sferice se bazează pe fenomenul de reflexie a
luminii pe oglindă. Pentru a construi imaginea unui obiect plan, aştezat perpendicular pe
axul optic, se folosesc următoarele raze particulare de lumină:
- raza de lumină care pleacă dintr-un punct al obiectului şi trece prin centrul C al oglinzii,
se reflectă pe aceeaşi direcţie dar în sens contrar.
- raza de lumină care pleacă dintr-un punct al obiectului şi se propagă spre oglindă paralel
cu axul optic, se reflectă pe oglindă astfel încât se întoarce prin focarul oglinzii F.
- raza de lumină care pleacă dintr-un punct al obiectului şi se propagă spre oglindă trecând
prin focarul F al oglinzii, se reflectă pe oglindă astfel încât se întoarce paralel cu axul optic
principal.
Cu ajutorul celor trei raze de lumină particulare se poate construi foarte uşor imaginea
unui obiect atât în oglinzile concave cât şi în cele convexe. Se poate remarca că imaginea
unui obiect într-o oglindă concavă poate fi reală, dar şi virtuală, mărită, dar şi micşorată,
dreaptă, dar şi răsturnată – toate aceste situaţii depinzând de poziţia pe care o are obiectul
faţă de oglindă, în schimb, pentru o oglindă convexă, dacă obiectul este real, imaginea este
întotdeauna virtuală, micşorată şi dreaptă, indiferent de poziţia obiectului faţă de oglindă.
Oglinda plană poate fi considerată o oglindă sferică pentru care raza poate fi
considerată infinit de mare. Relaţiile (6.6), (6.7), (6.8), conduc la:

193
P2 = - p1
1=β
Oglinda plană formează o imagine simetrică cu obiectul faţă de oglindă (imagine
virtulală, dacă obiectul este real şi invers). Imaginea este evident dreaptă şi egală în
mărime cu obiectul.
Trebuie de asemenea remarcat că oglinda plană este un sistem optic riguros
stigmatic, întrucât poziţia imaginii unui punct nu depinde de unghiul de incidenţă al
razelor care pornesc din punctul obiect.
6.2.6. Lentila subţire
Lentila este un sistem optic sub forma unui mediu transparent, limitat de doi dioptri
sferici sau un dioptru sferic şi unul plan.
Dacă ambii dioptri sunt sferici, axele lor optice coincid (dioptri centraţi),
constituind axul optic al lentilei. Pentru stabilirea relaţiilor privind poziţia şi mărimea
imaginii formate de o lentilă ţinem seama că imaginea formată de primul dioptru pe care
cade lumina devine obiect pentru cel de-al doilea dioptru, imaginea dată de acesta din
urmă constituind imaginea formată de lentilă. Dacă distanţa dintre vârfurile celor doi
dioptri care constituie lentila este mică, putem aproxima această distanţă cu un punct,
numit centrul optic al lentilei O. Lentilele pentru care se poate face această aproximaţie
poartă numele de lentile subţiri. Tot ce vom spune în continuare despre lentile se va referi
doar la lentilele subţiri.
Formulele lentilelor subţiri se pot obţine din formulele dioptrului sferic, aplicate de
două ori pentru cei doi dioptri ai lentilei. Dupa efectuarea calculelor şi aproximarea
distanţei V1V2 dintre vârfurile dioptrilor cu zero se obţin formulele lentilelor subţiri:

194
fpp
111
12
=− (6.10)
unde: )
11)(1(
1
211
2
RRn
nf
−−= (6.11)
În relaţia de mai sus, n2 reprezintă indicele de refracţie al mediului lentilei şi n1 indicele de
refracţie al mediului exterior, iar R1 şi R2 sunt razele celor doi dioptri ai lentilei.
Mărirea transversală se obţine ca fiind un produs al măririlor în cei doi dioptri care
mărginesc lentila:
1
221
p
p== βββ (6.12)
La lentile se obişnuieste să se vorbească de o singură distanţă focală f (dată de
formula 6.11), dar de fapt lentila are două focare aşezate simetric faţă de lentila, F1 –
focarul obiect şi F2 – focarul imagine.
Inversul distanţei focale a unui sistem optic se numeşte convergenţa acestuia.
Unitatea de masură a convergenţei este dioptria (m-1):
f
C1
=
Din punct de vedere geometric lentilele pot avea formele schiţate în figura 6.3.
Formelor numerotate cu 1, 2, 4 şi 5 le corespund denumirile de lentile biconvexă,
plan convexă, biconcavă şi plan concavă. Lentila de forma 3 se numeşte menisc
convergent, iar cea de forma 6 se numeşte menisc divergent.
1 2 3 Lentile convergente
fig. 6.3
4 5 6 Lentile divergente
195
Lentilele de formele 1, 2 şi 3 sunt mai groase în dreptul axului optic decât la
margine, iar lentilele, 4, 5 şi 6 sunt mai groase la margine.
Lentilele de formele 1, 2, şi 3 se numesc lentile convergente.
Lentilele convergente au distanţa focală pozitivă, iar focarele lor sunt reale şi aşezate
simetric faţă de centrul optic al lentilei, cu F1 aflat de aceeaşi parte a lentilei ca şi obiectul,
iar F2 în partea opusă.
Lentilele de formele 4, 5, şi 6 se numesc lentile divergente.
Lentilele divergente au distanţa focala negativă, iar focarele lor sunt virtuale şi aşezate
simetric faţă de centrul optic al lentilei, cu F2 aflat de aceeaşi parte a lentilei ca şi obiectul,
iar F1 în partea opusă.
Întrucât dupa străbaterea lentilei razele dintr-un fascicul paralel cu axul optic au
direcţii care se intersectează în F2, o lentilă convergentă va transforma un fascicul paralel
într-un fascicul convergent, iar o lentilă divergentă îl va transforma într-un fascicul
divergent, de unde şi denumirile celor două feluri de lentile.
Formarea imaginilor în lentilele subţiri se bazează pe fenomenul de refracţie al
luminii pe cei doi dioptri ai lentilei. Pentru a construi imaginea unui obiect plan, aşezat
perpendicular pe axul optic, se folosesc următoarele raze particulare de lumină.
a) pentru lentila convergentă
- raza de lumină care trece prin centrul optic al lentilei trece nedeviată.
- raza de lumină care pleacă dintr-un punct al obiectului şi se propagă spre lentilă paralel
cu axul optic, se refractă prin focarul imagine F2 al lentilei.
- raza de lumină care pleacă dintr-un punct al obiectului şi se propagă spre lentilă trecând
prin focarul obiect F1 al lentilei, se refractă astfel încât trece de lentilă paralel cu axul optic
principal.
b) pentru lentila divergentă

196
- raza de lumină care trece prin centrul optic al lentilei trece nedeviată.
- raza de lumină care pleacă dintr-un punct al obiectului şi se propagă spre lentilă paralel
cu axul optic, se refractă astfel încât prelungirea ei sa treacă prin focarul imagine F2 al
lentilei.
- raza de lumină care pleacă dintr-un punct al obiectului şi se propagă spre lentilă pe
direcţia focarului obiect F1 al lentilei, se refractă astfel încât trece de lentilă paralel cu axul
optic principal.
Cu ajutorul celor trei raze de lumină particulare se poate construi foarte uşor
imaginea unui obiect atât în lentilele convergente cât şi în cele divergente. Se poate
remarca că imaginea unui obiect într-o lentilă convergentă poate fi reală, dar şi virtuală,
mărită, dar şi micşorată, dreaptă, dar şi răsturnată – toate aceste situaţii depinzând de
poziţia pe care o are obiectul faţă de lentilă, în schimb, pentru o lentilă divergentă, dacă
obiectul este real, imaginea este întotdeauna virtuală, micşorată şi dreaptă, indiferent de
poziţia obiectului faţă de lentilă. În figura (6.4) exemplificăm modul de construcţie a
imaginilor într-o lentilă, în cazul unei lentile convergente, cu obiectul aşezat mai departe
de lentilă decât dublul distanţei sale focale:
În acest caz imaginea obiectului prin lentila convergentă este o imagine reală, micşorată şi
răsturnată.
De obicei un sistem optic este constituit din mai multe lentile, iar un caz special pentru
un sistem optic cu mai multe lentile îl constituie cazul în care aceste lentile sunt centrate şi
O F2
fig. 6.4
F1
L

197
aflate în contact - sistem de lentile alipite. Pentru un astfel de sistem, convergenţa
sistemului este egală cu suma algebrică a convergentelor componentelor sistemului:
∑=i
iCC
6.2.7. Prisma optică
Prisma optică este un mediu transparent, delimitat de doi dioptri plani, a căror
intersecţie reprezintă muchia prismei. Un plan perpendicular pe muchia prismei constituie
o secţiune principală prin prismă (figura 6.5). Cea de-a treia latură a prismei geometrice
poate fi chiar neşlefuită şi nepolişată, putând fi chiar diferită de un plan.
Unghiul diedru A este numit unghi refringent al prismei. Practic, în toate aplicaţiile
indicele de refracţie n al materialului din care este făcută prisma este mai mare decât al
mediului înconjurător, de obicei aerul. Mersul unei raze de lumină monocromatice prin
prismă este arătat în figura (6. 5), unde i şi i’ reprezintă unghiurile de incidenţă şi respectiv
de emergenţă, iarδ reprezintă unghiul de deviaţie prin prismă al razei de lumină incidente.
Raza incidentă se refractă prima dată într-un punct I de pe faţa AB sub unghiul de
incidenţă i dupa care intră în prismă. La ieşirea din prismă suferă o noua refracţie în
punctul 'I de pe faţa AC, după care părăseşte prisma cu unghiul de emergenţă 'i . Notăm
cu r şi 'r unghiurile formate de raza de lumină din interiorul prismei cu normalele prin
cele două puncte de incidenţă. Prin străbaterea prismei, raza de lumină este deviată cu
A
B
fig. 6.5
C

198
unghiul δ faţă de de direcţia iniţială. Din considerente geometrice (fig. 6.5) unghiul de
deviaţie este:
'' riri −+−=δ
dar: 'rrA +=
deci deviaţia prin prismă este:
Aii −+= 'δ (6.13)
Dacă se roteşte prisma în jurul unui ax perpendicular pe secţiunea principală,
trecând prin primul punct de incidenţă, astfel încât unghiul de incidenţă să ia valori
succesive între 2/π şi zero, urmărindu-se în acelaşi timp şi variaţia unghiului de deviaţie
δ , se constată că acesta scade până la o valoare minimă mδ , după care începe să crească,
remarcându-se că deviaţia are valoare minimă când raza de lumină străbate prisma după o
direcţie perpendiculară pe bisectoarea unghiului refringent A.
În aceste condiţii 'ii = şi 2/Ar = şi deci:
Aim −= 2δ
Din legea refracţiei sin i = n sin r , de unde:
2sin
2sin
A
A
n
mδ+
= (6.14)
Conform relaţiei (6.14) se poate determina valoarea indicelui de refracţie al materialului
din care este realizată prisma măsurând cu un goniometru, unghiul de deviaţie minimă mδ
şi cunoscând valoarea unghiului refringent A al prismei.
Condiţia 'ii = la deviaţie minimă se poate stabili şi pe cale teoretică, derivând în
raport cu i mărimile care intervin în relaţiile prismei:
Aii −+= 'δ
rni sinsin =

199
'sin'sin rni =
Arr =+ '
Se obţine:
di
di
di
d '1+=
δ ;
di
drrni coscos =
di
drrn
di
dii
''cos
''cos = ; 0
'=+
di
dr
di
dr
la minim de deviaţie:
0=di
dδ
de unde:
1'
−=di
di
iar relaţiile precedente devin:
di
dr
di
dr '−= ,
di
drrni 'cos'cos −=− ,
di
drrni coscos =
Din împarţirea membru cu membru a ultimelor două relaţii se obţine:
r
r
i
i
cos
'cos
cos
'cos=
sau, după înlocuiri trigonometrice, ridicare la pătrat şi folosirea legii refracţiei:
)'sin
1)(sin1()sin
1)('sin1(2
22
2
22
n
ii
n
ii −−=−−
de unde:
in
ii
n
i 22
22
2
2
sin'sin
'sinsin
−−=−−
sau: )1
1('sin)1
1(sin2
22
2
ni
ni −=−

200
Întrucât amblele unghiuri, i şi 'i au valori cuprinse între o şi 2/π rezultă că la deviaţie
minimă:
'ii =
În cazul unei prisme de unghi refingent mic şi dacă unghiul de incidenţă este de
asemenea mic, sinusurile unghiurilor pot fi aproximate cu valorile unghiurilor respective,
putându-se scrie nri = şi '' nri = . În acest caz:
AnArrn )1()'( −=−+=δ
Deci, pentru prisme de unghi refringent mic şi la incidenţă practic normală, unghiul de
deviaţie prin prismă devine independent de valoarea unghiului de inchidenţă.
Dacă unghiul 'r este mai mare decât unghiul limită l la interfaţa prismă - mediul
înconjurator, raza de lumină se reflectă total pe faţa AC.
Deci, pentru ca o rază de lumină pătrunsă în prismă să mai poată ieşi din ea
(condiţia de emergenţă) trebuie ca:
'r < l sau 'sin r < n
l1
sin =
n fiind indicele de refracţie relativ al materialului prismei în raport cu al mediului
înconjurator. Întrucât 'rrA += , valoarea maximă a unghiului refringent al prismei A
pentru care lumina mai poate străbate prisma la deviaţie minimă, fară a se produce reflexie
totală pe faţa AC este:
lA 2max =
situaţie în care lumina pătrunde razant pe faţa AB şi iese razant pe faţa AC.
În anumite instrumente optice este necesară devierea luminii cu un anumit unghi,
(frecvent de 900 sau 1800) ceea ce se poate realiza prin refelxie totală în interiorul prismei.
Aceste prisme se numesc prisme cu refelxie totală (figura 6.6).
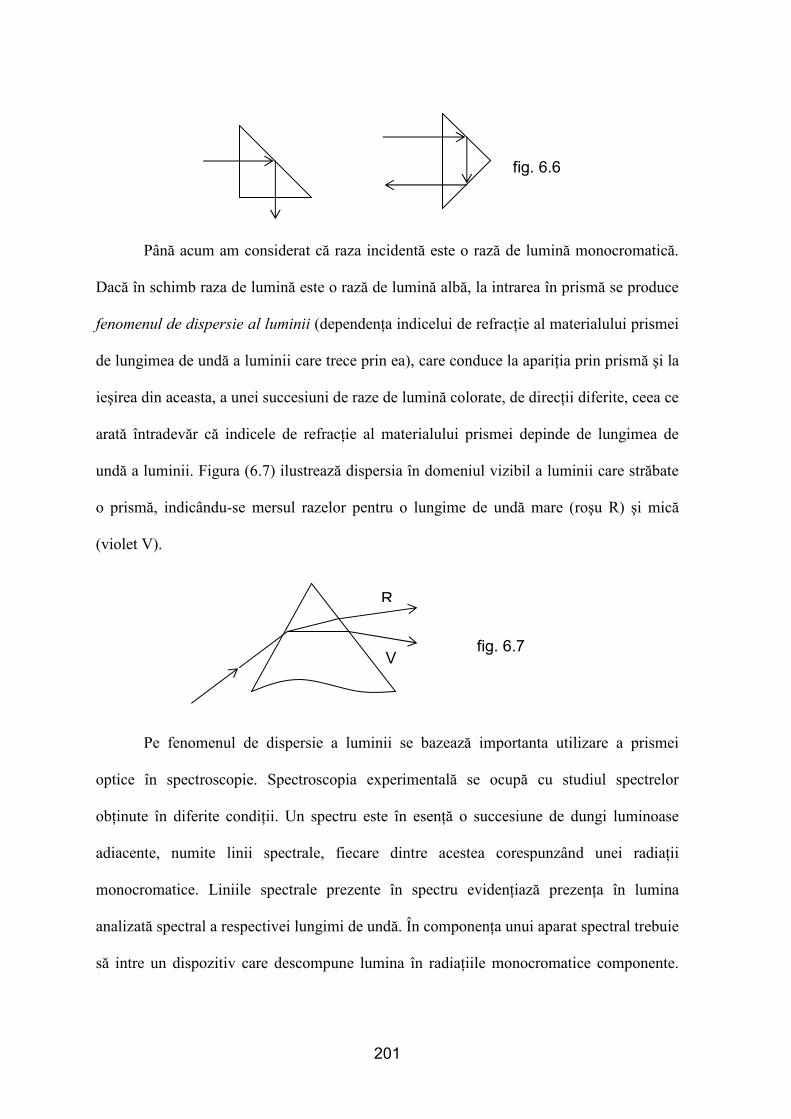
201
Până acum am considerat că raza incidentă este o rază de lumină monocromatică.
Dacă în schimb raza de lumină este o rază de lumină albă, la intrarea în prismă se produce
fenomenul de dispersie al luminii (dependenţa indicelui de refracţie al materialului prismei
de lungimea de undă a luminii care trece prin ea), care conduce la apariţia prin prismă şi la
ieşirea din aceasta, a unei succesiuni de raze de lumină colorate, de direcţii diferite, ceea ce
arată întradevăr că indicele de refracţie al materialului prismei depinde de lungimea de
undă a luminii. Figura (6.7) ilustrează dispersia în domeniul vizibil a luminii care străbate
o prismă, indicându-se mersul razelor pentru o lungime de undă mare (roşu R) şi mică
(violet V).
Pe fenomenul de dispersie a luminii se bazează importanta utilizare a prismei
optice în spectroscopie. Spectroscopia experimentală se ocupă cu studiul spectrelor
obţinute în diferite condiţii. Un spectru este în esenţă o succesiune de dungi luminoase
adiacente, numite linii spectrale, fiecare dintre acestea corespunzând unei radiaţii
monocromatice. Liniile spectrale prezente în spectru evidenţiază prezenţa în lumina
analizată spectral a respectivei lungimi de undă. În componenţa unui aparat spectral trebuie
să intre un dispozitiv care descompune lumina în radiaţiile monocromatice componente.
fig. 6.6
R
V fig. 6.7

202
Prisma optică realizează această descompunere prin fenomenul de dispersie a luminii.
Unul dintre cele mai simple aparate spectrale cu prisma este spectroscopul.
6.2.8. Aberaţiile sistemelor optice
Până acum s-a tratat formarea imaginilor cu ajutorul sistemelor optice în limita
aproximaţiei gaussiene (fascicule paraxiale) şi atribuind fiecărui mediu transparent o
anumită valoare a indicelui de refracţie. În aceste condiţii am stabilit că imaginea unui
obiect plan, perpendicular pe axul optic al sistemului este practic stigmatică - fiecărui
punct al obiectului îi corespunde o imagine punctuală, este plană şi situată de asemenea
perpendicular pe axul optic, şi este ortoscopică, adică asemenea obiectului, nedeformată.
Relaţiile stabilite în aproximaţia gaussiană sunt esenţiale pentru precizarea poziţiei
şi obţinerea mărimii imaginii formate cu ajutorul unui sistem optic, dar, în cazul
instrumentelor optice, la formarea imaginii contribuie şi razele neparaxiale şi, ca urmare,
imaginile se abat mai mult sau mai puţin de la stigmatism, planeitate şi ortoscopie. Aceste
abateri pot fi apreciate trasând mersul razelor de lumină, în conformitate cu legile refracţiei
şi reflexiei şi sunt denumite aberaţii geometrice.
În plus, aşa cum s-a arătat în paragraful precedent, indicele de refracţie al unui
mediu depinde de lungimea de undă a radiaţiei monocromatice considerate, ceea ce
conduce la nesuprapunerea imaginilor corespunzătoare diferitelor culori. Apare astfel
aberaţia cromatică.
Cunoaşterea aberaţiilor unui sistem optic prezintă interes pentru a vedea dacă sistemul
optic poate fi folosit sau nu în anumite aplicaţii.
203
Aberaţii geometrice:
1. Aberaţia de sfericitate. Aceasta apare în cazul formării imaginii cu un fascicul de
lumină larg şi simetric faţă de axul optic. Corectarea aberaţiei de sfericitate a unui
instrument optic se poate realiza: 1. reducând prin diafragmare lărgimea fasciculului de
lumină (ceea ce duce totuşi la o scădere a luminozităţii instrumentului); 2. prin constituirea
unui sistem centrat de lentile convergente şi divergente; 3. prin alegerea cât mai
avantajoasă a formei şi orientării fiecărei lentile.
2. Coma. Apare în cazul fasciculelor largi, puţin înclinate faţă de axul optic. Ea apare
datorită faptului că puterea de refracţie a sistemului optic este diferită pentru diferite
regiuni de incidenţă şi unghiuri de incidentă, ceea ce face ca razele de lumină să nu
conveargă în acelaşi punct imagine. În planul care secţionează fasciculul se obţin figuri
caracteristice de forma unei comete sau chiar mai complicate. Prin întrebuinţarea unei
diafragme se constată ca pentru o anumită poziţie a acesteia faţă de sistemul optic,
fasciculul de raze emergente prezintă o simetrie în mersul razelor ducând la micşorarea
aberaţiei de comă.
3. Aberaţia de astigmatism. Această aberaţie geometrică se manifestă atunci când imaginea
unui obiect punctiform este formată de către un fascicul îngust de lumină, mult înclinat
faţă de axul optic al sistemului. În aceste condiţii fasciculul emergent nu se mai
concentrează într-un punct ci formează două mici segmente de dreaptă. Aberaţia de
astigmatism este strâns legată şi de cea de curbură a câmpului. Astigmatismul unui sistem
optic se corectează prin alegerea potrivită a elementelor constructive: curburi, suprafeţe,
distanţe, indici de refracţie, etc.
4. Distorsiunea. Ea reprezintă abaterea de la condiţia de ortoscopie. Dacă mărirea
sistemului optic nu are aceeaşi valoare pentru toate regiunile obiectului plan, imaginea
acestuia este deformată, apărând aberaţia de distorsiune.
204
Distorsiunea poate persista şi după corectarea în măsură corespunzătoare a următoarelor
grupuri de aberaţii: de sfericitate împreună cu coma, sau de astigmatism împreună cu
curbura câmpului. În general, claritatea imaginii afectate doar de distorsiune nu este
influenţată de lărgimea sau de înclinarea faţă de axul optic a fasciculelor de lumină care
contribuie la formarea imaginii. Forma distorsionată a imaginii este condiţionată de
prezenţa în sistemul optic a unor diafragme şi care sunt uzual introduse pentru micşorarea
altor aberaţii. Prin faptul că distorsiunile sunt contrare pentru diafragma plasată după sau
înaintea sistemului optic, această aberaţie poate fi eliminată alcătuind un sistem optic din
două jumătaţi simetrice şi plasând diafragma (necesară din alte considerente) la mijlocul
distanţei dintre cele două jumătăţi ale sistemului.
Aberaţia cromatică
Această aberaţie se produce datorită fenomenului de dispersie a luminii care străbate
sistemul optic şi are drept consecinţă formarea unor imagini cu contururi irizate în diferite
culori. Întrucât mărirea imaginii produse de o lentilă depinde de distanţa focală a acesteia,
mărimile imaginilor vor fi diferite pentru diverse culori. Ştim că pentru o lentilă formula
distanţei focale este dată de relaţia:
)
11)(1
)((
1
211
2
RRn
nf
−−=
λ
unde )(2 λn , care este indicele de refracţie al materialului din care este confecţionată
lentila, depinde de lungimea de undă a luminii care o străbate. Datorită acestui fapt în
cazul unei lentile convergente focarul razelor violete se formează mai aproape de lentilă
decât focarul razelor roşii, iar în cazul unei lentile divergente poziţia focarelor
corespunzătoare razelor violete şi roşii este inversă. Acest lucru este folosit la eliminarea
aberaţiei cromatice prin asocierea unor lentile convergente cu unele divergente şi

205
realizarea unor sisteme, numite sisteme acromate. O asemenea asociere se obţine dacă pe o
lentilă biconvexă din sticlă de crown (pe bază de calciu) se lipeşte o lentilă divergentă din
sticlă de flint (pe bază de plumb). Această asociere compensează aberaţiile celor două
lentile astfel încât sistemul are un focar acromat.
6.2.9. Aparate optice
Intrumentele optice sunt combinaţii de oglinzi, lentile, prisme, formând un
ansamblu unitar, destinate observării şi măsurării unor mărimi optice. Ele se clasifică în
două categorii: aparate cu imagini reale (obiective) şi aparate cu imaginii virtuale
(oculare).
Aparatele optice obiective dau imagini reale şi funcţionează înregistrând imaginea
obiectelor pe un receptor fizic (placă sau film fotografic). Dintre aceste tipuri de aparate
amintim: aparatul fotografic, aparatul de proiecţie, retroproiectorul, epidiascopul, etc.
Imaginea reală furnizată de aparatul optic poate fi prinsă pe un ecran, o emulsie fotografică
sau un strat fotosensibil. Un astfel de strat este şi retina ochiului, de aceea, fară sa fie pe
deplin justificat, şi ochiul omenesc poate sa fie considerat un aparat optic care formează
imagini reale.
Aparatele optice ocupare dau imagini virtuale, funcţionează o dată cu ochiul şi
imaginea acestora se formează în ochiul observatorului, pe retină. Astfel de aparate sunt:
lupa, luneta, microscopul, telescopul, etc.
6.2.9.1. Caracteristicile aparatelor optice
Instrumentele sau aparatele optice sunt caracterizate prin anumite mărimi care
permit sa se facă comparaţia dintre două aparate de acelaşi tip şi să se poată alege care

206
dintre ele îndeplineşte anumite cerinţe. Principalele mărimi caracteristice ale aparatelor
optice sunt:
1. Mărirea liniară. Ea se defineşte ca fiind raportul dintre o anumită dimensiune liniară a
imaginii ( 2y ) şi dimensiunea corespunzătoare a obiectului ( 2y ). Deoarece numai imaginile
reale pot să aibă dimensiuni liniare măsurabile direct, rezultă că mărirea liniară se
defineşte doar pentru aparatele optice obiective:
1
2
y
yM =
2. Puterea
1
2
y
tgP
α=
unde 2α reprezintă unghiul sub care se vede prin instrument obiectul liniar de mărime 1y .
3. Grosismentul
1
2
αα
tg
tgG =
unde 2α reprezintă unghiul sub care se vede prin instrument obiectul, iar 1α unghiul cu
care se vede cu ochiul liber acelaşi obiect, situat la distanţa optimă de vedere δ .
Pentru ochiul uman normal se consideră cm25=δ , deci între putere şi grosisment
se poate stabili relaţia:
4
PPG == δ
4. Puterea separatoare. Reprezintă proprietatea pe care o are un aparat optic de a vedea
distinct prin el două puncte apropiate ale obiectului. În cazul microscopului, puterea
separatoare este cea mai mică distanţă dintre două puncte ale obiectului pentru ca ele să se
vadă distinct prin aparat – putere separatoare liniară. Dacă punctele sunt prea apropiate
ele se suprapun. În cazul lunetei puterea separatoare este determinată de unghiul minim

207
dintre două raze care vin de la două puncte luminoase (de exemplu de la două stele) pentru
ca ele sa dea imagini separate - în acest caz putem vorbi de putere separatoare unghiulară.
5. Câmpul unui aparat. Este regiunea din spaţiu pe care o poate explora aparatul. Se poate
vorbi astfel de un câmp de lărgime cu dimensiunile perpendiculare pe axul optic al
aparatului cât şi de un câmp de adâncime, cu dimensiunile pe direcţia axului optic.
6. Claritatea. Reprezintă raportul fluxurilor luminoase trimise ochiului de suprafeţe egale
din obiect şi din imagine. La aparatele cu putere mică pentru îmbunătăţirea clarităţii se
caută să se mărească fluxul luminos care pătrunde în aparat.
6.2.9.2. Aparate optice cu imagini reale
1. Ochiul poate fi socotit foarte bine un sistem optic, deoarece el formează imagini reale pe
retină, dar ochiul este un sistem optic complicat, iar pentru a putea compara sistemul optic
al ochiului cu sistemele optice obişnuite se introduce un model simplificat al ochiului,
sistem numit ochiul redus. Acesta se consideră a fi un dioptru sferic, având raza de curbură
şi indicele de refracţie potriviţi asfel încât să formeze imaginea în dreptul retinei ochiului.
Ochiul redus are lungimea de 22 mm, raza 5,7 mm, indicele de refracţie 1,33, raza de
curbură a retinei 9,7 mm, frontifocalele anterior şi posterior 17, 1 mm şi 22, 8 mm, puterea
58,64 dioptrii.
Imaginea reală de pe retină este formată de către cristalin, acesta fiind alcătuit din
straturi suprapuse, flexibile. Sub acţiunea muşchilor ciliari suprafeţele limitatoare ale
cristalinului se pot bomba, conferind sistemului convergenţa necesară pentru formarea
imaginii pe retină. Operaţia respectivă se numeşte acomodarea ochiului. Ochiul normal
poate vedea clar obiecte situate între infinit şi 15 cm. Neacomodat, deci relaxat, ochiul se
găseşte în starea de convergenţă minimă, care, la ochiul normal, corespunde formării pe

208
retină a imaginii obiectelor de la infinit. Pentru observarea obiectelor de la 15 cm
acomodarea este puternică, devenind obositoare dacă este menţinută un timp îndelungat.
De aceea se consideră drept distanţă minimă de vedere acea distanţă pe care ochiul o poate
menţine, fară efort, un timp îndelungat. Pentru ochiul normal se adoptă drept distanţă
minimă de vedere distinctă δ =25, cm.
Punctul cel mai îndepărtat vizibil (M )se numeşte punctum remotum, iar punctul cel
mai apropiat vizibil fară oboseală (m), punctum proximum. Pentru ochiul normal M se află
la infinit faţă de ochi iar m se află la δ faţă de ochi.
Dacă, fară acomodare, imaginea unui obiect de la infinit se formează înaintea
retinei, ochiul este miop, distanţa cristalin - retină fiind mai mare decât cea
corespunzătoare ochiului normal, iar dacă, tot fără acomodare, imaginea unui obiect de la
infinit s-ar forma în spatele retinei, ochiul este hipermetrop, distanţa cristalin - retină fiind
mai mică decât la ochiul normal. Miopul vede clar, fară acomodare, obiectele situate la o
distanţă mai mică decât infinit şi, cu acomodare, obiecte situate la o distanţă mai mică
decât δ . Pentru miop punctele M şi m sunt mai apropiate de ochi decât pentru o persoană
cu ochi normal. Hipermetropul vede, cu acomodare, obiecte situate între infinit şi o
distanţă mai mare decât δ , punctum proximum al hipermetropului fiind mai îndepărtat de
ochi decât pentru o persoană cu ochi normal.
Ambele defecte pot fi corectate cu ochelari sub formă de lentile divergente, în
cazul miopiei, şi convergente, în cazul hipermetropiei. Lentilele pentru ochelari se fac sub
formă de menisc divergent, respectiv convergent, suprafaţa convexă fiind îndreptată spre
obiect, iar cea concavă spre ochi.
Cu vârsta, capacitatea de acomodare scade, cristalinul nu se mai poate bomba
suficient pentru formarea pe retină a imaginii obiectelor situate la distanţa de 0, 25 m.

209
Îndepărtarea punctului proxim se corectează pentru presbit cu ochelari convergenţi, ca şi
pentru ochiul hipermetrop.
Ochiul are o putere de separaţie unghiulară de aproximativ un minut, ca urmare,
două stele, apropiate unghiular, mai apar separate la observarea cu ochiul liber, dacă
unghiul format de fasciculele paralele provenite de la acestea este de cel puţin un minut.
2. Aparatul de fotografiat. Partea principală a aparatului de fotografiat o constituie
obiectivul, care poate fi de la o simplă lentilă până la un sistem foarte complicat, cu
distanţe focale diferite şi care dau posibilitatea ca aparatele fotografice să posede
caracteristici foarte diferite cu privire la mărire, puterea de separare, câmp şi luminozitate.
Formarea imaginii este aceeaşi ca la oricare lentilă convergentă. Imaginea reală se
formează pe placa sensibilă fotografică pe care o impresionează şi în urma unui tratament
– de revelare şi fixare - se formează o imagine, „negativul”, după care într-un proces
invers de impresionare a altui strat fotosensibil se obţine „pozitivul”, o imagine
asemănătoare obiectului.
Pentru micşorarea aberaţiilor se întrebuinţează o diafragmă. Obiectivele simple au
o diafragmă montată în faţa obiectivului, o lentilă convergentă cu concavitatea spre
exterior pentru a micşora astigmatismul şi curbura câmpului, nu însă şi distorsiunea.
Pentru acromatizare se utilizează dublete acromate. Prin întrebuinţarea a două lentile
simple sau acromate montate simetric faţă de diafragmă practic sunt înlăturate coma,
distorsiunea şi aberaţia cromatică. Mărirea tipurilor de lentile, ca şi montarea diafragmei
simetric sau nesimetric în interiorul sistemului optic, au dus la o mulţime de tipuri de
obiective, deci la o mulţime de tipuri de aparate de fotografiat.
Obiectivul fotografic fiind destinat înregistrării fotografice a imaginii, prezintă
unele caracteristici legate de faptul că înnegrirea emulsiei fotografice depinde de cantitatea
de energie radiantă recepţionată în timpul expunerii. Ca urmare, timpul convenabil de

210
expunere va depinde de luminozitatea aparatului fotografic, în estenţă a obiectivului
acestuia.
Cu cât obiectul de fotografiat este mai îndepărtat, cu atât imaginea sa este mai
mică. Pe o imagine de mici dimensiuni unele detalii se pierd din cauza dimensiunilor
finite ale microcristalelor fotosensibile, o ulterioară mărire a fotografiei ne mai putând
îmbunătăţi rezoluţia imaginii. Pentru o distanţă obiect – obiectiv fotografic dată,
dimensiunea imaginii se poate mări prin creşterea distanţei focale a obiectivului. Aceasta
impune însă lungirea, neconvenabiă, a aparatului fotografic. O soluţie de realizare a unui
obiectiv cu distanţă focală suficient de mare, menţinându-se lungimea aparatului în valori
convenabile, este adoptată în cazul teleobiectivului. El se compune dintr-un sistem
convergent şi unul divergent. Prin introducerea lentilei divergente, distanţa focală a
teleobiectivului, distanţă de care depinde mărirea imaginii, este mult mai mare decât
lungimea aparatului.
Fotoreporterii au nevoie să treacă rapid de la înregistrări de prim plan la
fotografierea unor ansambluri, deci să modifice fără dificultate mărirea imaginii, fără a
schimba poziţia filmului. Aceasta impune schimbarea rapidă a distanţei focale a
obiectivului. În acest scop se folosesc în prezent obiective fotografice numite zoom
(obiective transfocatoare). Un astfel de obiectiv transfocator este alcatuit din trei lentile,
dintre care cele marginale au poziţii fixe în interiorul obiectivului, iar cea centrală se poate
deplasa între acestea în lungul axului optic comun. Prin această deplasare se schimbă
distanţa focală a obiectivului şi deci mărirea imaginii. Cuplarea deplasării lentilei centrale
cu deplasarea întregului obiectiv faţă de film permite ca filmul să rămână în planul focal al
obiectivului, oricare ar fi distanţa focală momentană a acestuia.
3. Aparatul de proiecţie. Aparatele de proiecţie servesc la proiectarea pe un ecran a
imaginii unei figuri, a unui clişeu prin transparenţă - dispozitiv numit diascop, sau a unui

211
text de pe o carte, plan, fotografie - dispozitiv numit episcop. Sunt aparate care întrunesc
în ele cele două funcţii şi se numesc epidiascoape. La orice aparat de proiecţie se disting
două părţi principale: condensorul de lumină şi obiectivul. Condensorul are ca scop
iluminarea uniformă a filmului. El este în general constituit din două lentile plan convexe,
iar clişeul se aşează alături de faţa posterioară a condensorului pentru a fi cât mai uniform
luminat. Obiectivul se aşează în conul luminos al condensorului pentru a utiliza toate
razele.
4. Retroproiectorul, este un aparat de proiecţie care serveşte la proiectarea pe un ecran a
ceea ce este scris sau desenat pe o folie transparentă. Deosebirile faţă de aparatul de
proiecţie constau în aceea că în cazul retroproiectorului obiectivul are dimensiuni mult mai
mari (circa 25cm x20 cm) şi că el este aşezat orizontal.
6.2.9.3. Aparate optice cu imagini virtuale
1. Lupa este cel mai simplu instrument ocular (cu imagini virtuale) şi este de obicei o
lentilă simplă convergentă cu distanţă focală mică. Imaginea virtuală formată de lupă
trebuie să se formeze la o distanţă mai mare decât distanţa optimă de vedere δ , de preferat
la infinit, distanţă pentru care ochiul nu are nevoie de acomodare. Puterea lupei este data
de inversul distanţei sale focale f:
fP
1=
Lupa prezintă aberaţii care se pot observa mai ales de la distanţe focale f mai mici
de 30 mm. Pentru aceasta s-au confecţionat lupe formate din mai multe lentile, alipite sau
depărtate.
2. Microscopul. Acest aparat serveşte la observarea obiectelor foarte mici care nu pot fi
distinse cu ochiul liber. Este un aparat optic ocular compus din două parţi: obiectivul,
212
îndreptat spre obiect şi ocularul, în apropierea căruia se află ochiul observatorului. Ambele
părţi ale microscopului sunt sisteme optice mai mult sau mai puţin complexe.
Obiectivul primeşte fascicule largi de la puncte situate în imediata apropiere a
axului optic al instrumentului. Imaginea dată de obiectiv trebuie sa fie corectată în special
pentru aberaţia de sfericitate, coma şi aberaţia cromatică. Se construiesc obiective uscate
şi obiective cu imersie, după cum staţiul dintre lentila frontală a obiectivului şi lama cu
preparatul de observat este plin cu aer sau cu un lichid de imersie.
Ocularul vizează un câmp larg, primind de la fiecare punct al obiectivului câte un
fascicul îngust, dar care poate fi mult înclinat faţă de axul optic. Ca urmare, ocularul
trebuie să fie corijat mai ales pentru astigmatism, curbura câmpului, distorsiune şi aberaţia
cromatică. Obiectivul microscopului formează o imagine reală şi mărită a obiectului, care
devine obiect pentru ocular; imaginea dată de ocular, care are rolul de lupă, fiind virtuală.
Distanţa focală a obiectivului microscopului este de câţiva milimetri, iar cea a ocularului
de câţiva centimetri. Puterea microscopului este dată de relaţia:
21
ff
eP =
unde f1 şi f2 sunt distanţele focale ale obiectivului, respectiv ocularului, iar e – interstiţiul,
distanţa dintre focarul imagine al obiectivului şi focarul obiect al ocularului.
Preparatul microscopic este iluminat puternic de un condensor format fie dintr-o oglindă
concavă, fie de un sistem de lentile convergente cu distanţă focală scurtă.
3. Luneta. Telescopul. Lunetele şi telescoapele sunt instrumente care au ca scop mărirea
diametrului aparent sub care apar imaginile obiectelor îndepartate. Dacă obiectivul este de
regulă o oglindă, aparatul se numeşte telescop; în cazul unui obiectiv format din lentile,
aparatul se numeşte lunetă. În ambele cazuri privim imaginea reală formată de obiectiv cu
ajutorul unui ocular.
213
Lunetele sunt de dpuă tipuri: lunete terestre care formează o imagine dreaptă a
obiectelor terestre îndepărtate şi lunete astronomice, alcătuite dintr-un obiectiv convergent
cu distanţă focală mare, de ordinul metrului, şi care formează o imagine răsturnată a
obiectelor cereşti.
Principala aberaţie prezentată de obiectivul unei lunete este aberaţia cromtică.
Pentru evitarea acestei aberaţii s-au construit telescoape cu oglindă parabolică în care, prin
faptul că avem doar reflexie, nu apare aberaţia cromatică. În plus, în cazul fasciculului
paralel cu axa optică, oglinda parabolică strânge razele în focarul ei, fără a prezenta
abereţia de sfericitate. Oglinzile realizate pot avea diametre mari, s-a ajuns până la 6 m,
care atrage după sine şi o micşorare a efectelor de difracţie, deci o putere separatoare mai
mare decât în cazul lunetelor.
Diferitele tipuri de telescoape funcţionează după acelaşi principiu: imaginea
obiectului care este situat la infinit (foarte îndepartat), se formează în focarul oglinzii. Se
interpune în mersul razelor fie o oglindă plană – telescopul lui Newton, fie o oglindă
hiperbolică – telescopul Cassegrain şi care produce o deviere laterală a fasciculului sau
întoarecerea fasciculului spre oglinda telescopului, astfel că imaginea sa poată fi observată
cu ajutorul unui ocular. Grosimentul telescopului este dat, ca şi la lunetă, de raportul
distanţelor focale ale obiectivului şi ocularului:
ocular
obiectiv
f
fG =

214
6.3. Optica ondulatorie
6.3.1. Interferenţa luminii
Prin interferenţă se înţelege efectul suprapunerii a două sau mai multe unde de
frecvenţe egale şi coerente. În prezentul capitol sunt tratate fenomenele care apar la
suprapunera unor unde luminoase, unde care în cadrul opticii ondulatorii sunt tratate ca
fiind unde de natură electromagnetică. Astfel conform teoriei electromagnetice lumina este
o undă electomagnetică transversală având două componente care se propagă corelat,
câmpul electric şi câmpul magnetic. Aceste două componente sunt perpendiculare între
ele, sunt corelate ca mărime şi sunt orientate perpendicular pe direcţia de propagare a
undei. Totuşi, din cele două componente ale câmpului electromagnetic doar componenta
electrică este sesizată de către ochi, celulă fotografică sau emulsie fotografică şi, deci,
vectorul câmp electric Er
al undei trebuie considerat drept vector luminos, oscilaţiile
luminoase reprezentând variaţiile periodice ale acestui vector. Conform teoriei
electromagnetice toate undele de natură electromagnetică, deci şi lumina, se propagă în vid
cu viteza de circa 3.108 m/s.
În cele ce urmează vom înţelege prin intensitatea luminii energia luminoasă care
trece în unitatea de timp prin suprafaţa perpendiculară pe direcţia de propagare a luminii.
Intensitatea luminii este proporţională cu amplitudinea vectorului luminos, deci cu pătratul
valorii maxime a intensităţii câmpului electric al undei în locul respectiv.
Efectul interferenţei undelor poate fi înţeles ca un efect al suprapunerii undelor pe
baza principiului superpoziţiei formulat de către Young în 1802 cu referire la suprapunerea
undelor de natură elastică. Conform acestui principiu, deplasarea unui punct al mediului, în
zona în care se suprapun cele două unde, este suma vectorială a deplasărilor produse de
215
fiecare undă în parte. Deci efectul suprapunerii mai multor unde se obţine însumând
vectorii deplasare corespunzători tuturor undelor care interferă în locul respectiv.
Principiul superpoziţiei poate fi aplicat imediat la interferenţa undelor luminoase,
înlocuindu-se vectorii deplasare cu vectorii câmp electric ai undei în locul unde are loc
interferenţa. În cazul interferenţei optice, în regiunea de interferenţă a undelor luminoase,
în anumite condiţii pe care le vom preciza în continuare, apar aşa numitele franje de
interferenţă, care reprezintă o distribuţie locală de maxime şi minime de intensitate a
luminii. Întrucât intensitatea luminii este proporţională cu pătratul amplitudinii oscilaţiei
(pătratul valorii maxime a vectorului luminos), franjele de interferenţă pun în evidenţă
tocmai variaţia în spaţiu a intensităţii luminoase. Pentru explicarea fenomenului de
interferenţă este necesar să se calculeze valoarea amplitudinii rezultante, în funcţie de
mărimile care caracterizează oscilaţiile componente, şi deci să se înţeleagă fenomenul de
compunere a oscilaţiilor paralele şi de frecvenţă egale.
Aşa cum este cunoscut, componenta electrică a câmpului electromagnetic care se
propagă în spaţiu pe o direcţie oarecare Ox, poate fi scrisă de forma:
)sin(),( 0 kxtEtxE −= ωrr
unde T
ππνω
22 == , ν este frecvenţa iar T este perioada undei. Mărimea
λπ2
=k se
numeşte număr de undă, λ reprezentănd lungimea de undă, iar kxt −ω , numindu-se faza
undei. O astfel de undă care se propagă pe o singură direcţie, poarta numele de undă plană.
În optică, în afara de undele plane, se operează şi cu unde sferice care se pot descrie cu
expresia:
)sin(),,,( 0 krtr
EtzyxE −= ω
rr
În acest caz suprafaţa de undă este sferică.

216
La o undă oarecare atât amplitudinea undei cât şi faza pot depinde de timp.
Să considerăm pentru simplificare două unde plane 1Er
şi 2Er
de frecvenţe egale, ale
căror direcţii de vibraţie sunt paralele şi care se suprapun într-o anumită regiune din spaţiu:
)sin(),( 1011 kxtEtxE −= ωrr
)sin(),( 2022 kxtEtxE −= ωrr
Unda rezultantă se poate scrie:
21 EEErrr
+=
şi este de forma:
)sin(),( 0 kxtEtxE −= ωrr
Cunoaştem de la compunerea oscilaţiilor paralele şi de frecvenţe egale că amplitudinea
undei rezultante este dată de relaţia:
ϕ∆++= cos2 0201202
201
20 EEEEE (6.15)
unde ϕ∆ reprezintă diferenţa de fază dintre cele două unde.
Din relaţia de mai sus rezultă că amplitudinea undei rezultante nu depinde doar de
amplitudinile 01E şi 02E ale undelor care se suprapun, ci şi de diferenţa de fază, a fazelor
celor două unde.
Ochiul sau oricare alt receptor optic nu poate urmări o variaţie rapidă ca cea a
amplitudinii undei luminoase rezultante. Frecvenţa medie a undelor din domeniul optic
este de ordinul 1015 Hz, pe care detectorii optici nu o pot înregistra, ci o pot doar media.
Intensitatea luminii este proporţionlă cu amplitudinea medie a undei la pătrat:
≈I < 20E >
deci relaţia (6.15) poate fi scrisă:
2121 2 IIIII ++= < ϕ∆cos > (6.16)
217
unde termenul 212 II < ϕ∆cos > reprezintă termenul de interferenţă.
Dacă acest termen este nul nu apare fenomenul de interferenţă şi în acest caz 21 III += ,
deci avem o simplă suprapunere a celor două unde luminoase, intensitatea luminii având
aceeaşi valoare în întrega zonă în care cele două unde luminoase se suprapun.
Dacă acest termen este nenul, apare ceea ce numim fenomenul de interferenţă şi în acest
caz 21 III +≠ , în regiunea de interferenţă a undelor luminoase, intensitatea luminii nu mai
este aceeaşi, ea se modifică de la punct la punct şi apar aşa numitele franje de interferenţă,
care reprezintă o distribuţie locală de maxime şi minime de intensitate a luminii.
Pentru ca intensitatea undei rezultante să fie constantă în fiecare punct al zonei de
interferenţă termenul < ϕ∆cos > trebuie să rămână constant în timp. Numim această
condiţie, condiţia de coerenţă. Deci două unde sunt coerente dacă:
< ϕ∆cos > = ϕ∆cos = constant.
6.3.1.1. Noţiuni despre condiţia de coerenţă
Dacă în cazul undelor elastice este uşor sa se obţină maxime şi minime de
interferenţă, realizându-se uşor conditia de diferenţă de fază constantă în timp, în cazul
undelor luminoase acest lucru prezintă dificultăţi.
Lumina este generată în interiorul unui microsistem (atom, ion, moleculă) care emite
continuu doar un interval foarte scurt, de ordinal 10-8 s. Se va genera astfel un tren de undă
de lungime finită, care se propagă în spaţiu. Numim lungimea trenului de undă, lungime de
coerenţă. Următoarea emisie din atom apare după un oarecare interval de timp, faza
iniţială a acestei oscilaţii electromagnetice neavând nici o legătură cu cea a emisiei
precedente. De asemenea, nu există nici o corelaţie între direcţiile vectorilor luminoşi
218
corespunzători diferitelor emisii, vectorul luminos putând avea orice orientare în planul
perpendicular pe direcţia de propagare a luminii.
Să ne închipuim că dispunem de două surse punctiforme de lumină, care emit
radiaţii monocromatice cu aceleaşi lungime de undă. Într-un punct din spaţiu, unde se
întâlnesc undele luminoase emise de cele două surse, vectorii luminoşi vor forma între ei
un unghi care va lua toate valorile posibile, în timpul observaţiei, nefiind îndeplinită
condiţia de paralelism a oscilaţiilor. Dar chiar dacă orientarea paralelă a vectorilor ar fi
impusă, folosindu-se lumină liniar polarizată, interferenţa tot nu ar fi observabilă din cauza
diferenţei de fază a oscilaţiilor componente, care poate lua de asemenea, statistic, toate
valorile posibile, intensitatea undei luminoase rezultante devenind – în tot spaţiul de
suprapunere a undelor – suma intensităţilor componente.
Deci cu două surse de lumină diferite nu se poate obţine o figură de interferenţă pentru că
sursele sunt incoerente.
Pentru a se realize condiţia de coerenţă facem ca cele două fascicule de lumină care
se suprapun să provină de la aceeaşi sursa de lumină, ceea ce e posibil prin folosirea
undelor difractate (aşa cum se procedează la dispozitivul Young) sau împărţind fasciculul
iniţial în două porţiuni - metoda divizării de amplitudine, care apoi pot fi aduse la
suprapunere (de ex. prin reflexie sau refracţie), ca în unele dispozitive de interferenţă
(oglinzi Fresnel, oglinda Lloyd, prisma Fresnel, bilentila Billet).
În cele două fascicule care interferă, raze provenite de la acelaşi punct al sursei ar
transporta trenuri de unde obţinute prin separarea în două a aceloraşi trenuri de unde
transportate de raza de lumină în lungul direcţiei de propagare, înainte de despicarea în
două a fasciculului. Evident, trenurile de undă succesive transportă oscilaţii necorelate
între ele din punct de vedere al fazei şi a orientării vectorului luminos. Dar trenurile de
unde din fasciculele care interferă şi care provin din dedublarea aceluiaşi tren de unde

219
reflectă aceleaşi schimbări care au avut în atomul emiţător. În locul de întâlnire al acestora
sunt îndeplinite condiţiile de producere a interferenţei. Deci în fasciculele care se
suprapun, deşi emisiile din diferite puncte ale sursei de lumină transportă oscilaţii
incoerente, din fiecare punct al sursei de lumină există două raze care transportă oscilaţii
coerente, astfel încât condiţia de coerenţă este îndeplinită pentru tot fasciculul, cu condiţia
întâlnirii în punctul de interferenţă a câte două trenuri de unde provenind din acelaşi tren
de unde iniţial. Îndeplinirea acestei condiţii depinde, pe de o parte, de lungimea trenurilor
de unde (lungimea de coerenţă), pe de altă parte, de diferenţa între distanţele străbătute de
razele de lumină de la separarea lor până în punctul unde se produce o nouă intersecţie.
Lungimea de coerenţă depinde de natura atomului emiţător, de linia spectrală aleasă şi de
condiţiile de excitare în sursa de lumină. Cu cât linia spectrală este mai fină, mai aproape
de monocromatism riguros, cu atât trenul de unde este mai lung şi deci, cu atât poate fi mai
mare distanţa dintre drumurile strabătute de razele de lumină care interferă, de la separarea
până la reîntâlnirea lor, fără ca interferenţa să dispară. Cu alte cuvinte, pentru ca
fenomenul de interferenţă să aibă loc, diferenţa de drum optic dintre undele care interferă
trebuie să fie mai mică decât lungimea de coerenţă.
Din tot ce am discutat pâna în prezent reiese că, pentru ca fenomentul de
interferenţă să se producă, trebuie ca undele luminoase să se suprapună în spaţiu, planele
lor de oscilaţie să fie paralele, trebuie să fie coerente, iar diferenţa de drum optic dintre
undele luminoase să fie mai mică decât lungimea de coerenţă.

220
6.3.1.2. Dispozitive de interferenţă
Dispozitivul Young
La acest dispozitiv obţinerea celor două unde coerente se face prin divizarea
frontului de undă. Acest dispozitiv are o importanţă istorică, deoarece cu ajutorul său s-a
realizat în 1801 prima experienţă de interferenţă a luminii, interpretată în cadrul teoriei
ondulatorii a luminii. Dispozitivul Young, extrem de simplu, este schiţat în figura 6.8.
Dispozitivul constă din două fante dreptunghiulare şi înguste, paralele. O altă fantă, la fel
ca şi cele două şi paralelă cu ele, iluminată puternic de către o sursă de lumină, iluminează
la rândul său cele două fante.
O sursă de lumină liniară sau o fantă îngustă, cum este cazul fantei F generează
unde cilindrice. Într-o secţiune perpendiculară pe suprafaţa cilindrului, este reprezentată
printr-un arc de cerc (desenat punctat în figura 6.8) unda cilindrică emisă de fanta F,
iluminată de sursa S. Astfel de unde cilindrice sosesc în punctual P de pe ecran de la
fantele F1 şi F2. Intersecţia celor două unde cilindrice este o dreaptă, în consecinţă franjele
sunt drepte.
Pentru calcularea interfranjei, notăm cu xm distanţa OP, iar din figura 6.8 obţinem:
2222 )( lxDr m ++=
*
F
F1 F2
D
r1
r2
2l S
P
O
xm
fig. 6.8

221
2221 )( lxDr m −+=
prin scăderea celor două relaţii de mai sus se obţine:
lxrr m421
22 =− ,
dar: )(2))(( 1212122
12
2 rrDrrrrrr −≅+−=−
unde s-a făcut aproximarea 2/)( 12 rr + =D deoarece distanţa D (de ordinal metrului) este
mult mai mare decât distanţele 2l şi xm (de ordinal milimetrilor).
Deci diferenţa de drum dintre cele două unde δ 12 rr −= este:
D
lxrr m212 =−=δ
Punând condiţia de maxim de interferenţă:
λmrr =− 12 , obţinută din condiţia: 1)/2cos(cos ==∆ λπδϕ
unde m este un numar întreg, şi se numeşte ordin de interferenţă;
xm are valoarea:
l
Dmxm 2
λ=
Dar franjele sunt echidistante şi interfranja, adica distanţa dintre două franje consecutive,
este:
l
Dxxi mm 21
λ=−= + (6.17)
Pentru m = 0 se obţine maximul situat în punctual O, numit maximul central sau franja
luminoasă centrală, de ambele părţi a acestui maxim situându-se maximele de ordinile ±1,
±2, ……, denumirea maximului fiind dată de valoarea numărului m.
Dacă sursa de lumină nu emite o radiaţie monocromatică atunci fiecare lungime de
undă îşi va forma propria figură de interferenţă. Poziţia maximului central nu depinde de
lungimea de undă, asfel că, în lumină albă maximul central va fi întotdeauna o franjă albă.
222
Cu ajutorul dispozitivului Young se observă franje de interferenţă pentru diferite
poziţii ale ecranului faţă de planul fantelor, însă bineînţeles că valoarea intrefranjei
diferită. Din acest motiv se spune că franjele obţinute cu acest dispozitiv sunt nelocalizate.
Mai există şi alte dispozitive care produc franje nelocalizate. Dintre acestea
amintim pe scurt:
- Oglinzile Fresnel. Dispozitivul este format din două oglinzi plane care fac între ele un
unghi foarte mic, deci sunt practic aproape una în prelungirea celeilalte. O sursă de lumină
(de regulă o fantă paralelă cu muchia comună a celor două oglinzi) aflată în faţa oglinzilor
va forma două imagini virtuale, exchivalente cu două surse de lumină coerente. Lumina
provenită de la cele două surse coerente virtuale, în fapt fasciculele de lumină reflectate pe
cele două oglinzi, se va suprapune într-o anumită zonă, deci se va produce fenomenul de
interferenţă. Acest dispozitiv se poate reduce la un dispozitiv de tip Young, ceea ce
permite calculul uşor al interfranjei.
- Biprisma Fresnel. Dispozitivul este format din două prisme identice de unghi refringent
foarte mic, realizate din sticlă cu acelaşi indice de refracţie şi care au baza comună. De la o
sursă de lumină aşezată în faţa biprismei porneşte un fascicul de lumină care va fi deviat
cu un unghi δ întru-un anumit sens de către o jumatate din biprismă şi în sens opus cu
acelaşi δ de către partea cealaltă de biprismă, astfel încât, într-o anumită regiune din
spaţiu aflată în vecinătatea biprismei lumina se suprapune, ca şi cum ar proveni de la două
surse virtuale de lumină coerente, şi deci se formează franje de interferenţă.
- Bilentilele Billet. În cazul acestui dispozitiv de interferenţă cele două surse coerente sunt
constituite din imaginile reale ale unei surse de lumină formate de către două jumătăţi ale
unei lentile convergente subţiri. Cele două jumătăţi de lentilă sunt depărtate una de alta,
spaţiul dintre ele fiind umplut cu o substanţă opacă. Sursa de lumină este situată în planul
223
de simetrie al dispozitivului, iar fenomenul de interferenţă are loc în zona de suprapunere a
fasciculelor provenite de la cele două jumătăţi de lentilă.
- Oglinda Lloyd. Acest dispozitiv este constituit dintr-o oglindă plană, astfel aşezată, încât
lumina care se reflectă pe oglindă să interfere cu fasciculul provenit direct de la sursă. Cele
două surse de lumină, sursa de lumină reală şi imaginea sa virtuală în oglinda plană, fiind
coerente. Lărgimea câmpului de intereferenţă depinde de dimensiunile şi poziţionarea
oglinzii faţă de sursă.
În dispozitivele descrise anterior, de tip Young – Fresnel, franjele se găseau, atunci
când sursa era de dimensiuni mici, răspândite într-o regiune întinsă din spaţiu, deci
nelocalizate, adică nu se observau doar într-un singur loc. Prin iluminarea însă a unei
pelicule, un strat subţire de ulei întins pe apa, a băşicilor de săpun, a straturilor subţiri de
oxizi de pe o lama de oţel, etc., se observă coloraţii în lumină albă şi franje luminoase şi
întunecoase în lumină monocromatică. Aceste franje se observă pe pelicula sau lama însăşi
şi de aceea ele se numesc franje localizate. Prezentăm mai jos câteva tipuri de dispozitive
care produc franje localizate:
- Lama cu feţe plane şi paralele. Într-o astfel de lamă cele două raze de lumină provin din
despicarea aceleiaşi raze de lumină incidente, deci ele sunt coerente. Aceste raze se
întâlnesc la infinit, sau dacă străbat un sistem convergent, în planul focal imagine al
acestuia. În figura 6.9 este prezentat mersul razelor de lumină prin lamă. Intensitatea
luminii în punctul de intersecţie al celor două raze este condiţionată de diferenţa
drumurilor optice. Până în punctul A razele străbat acelaşi drum. Conform principiului lui
Fermat, de la frontul de undă DC până în punctul de interferenţă drumurile optice sunt
egale. Diferenţa de drum este deci cea care se produce între punctul A, unde are loc
despicarea, şi frontul de undă DC. Pe parcursul ABC drumul optic este:

224
r
dnBCABn
cos2)(1 =+=δ
Pe AD drumul optic are valoarea:
idtgriACAD sin2sin2 ===δ
Reflexia pe un mediu mai refringent induce o defazare egală cu π . Ca urmare, reflexia în
A introduce o diferenţă de drum de ± 2/λ , ceea ce nu se întâmplă la reflexia în B. Deci
drumul optic 2δ are valoarea:
2
sin22
λδ −= idtgi
Diferenţa de drum dintre cele două raze este:
2
)sincos
(221
λδδδ +−=−= itgr
r
nd
iar dupa efectuarea calculelor diferenţa de drum are valoarea finală:
2
cos2λ
δ += rnd
Să presupunem că lumina reflectată de lama cu feţe plane şi paralele întâlneşte o
lentilă convergentă, aşezată asfel încât să aibă axul optic perpendicular pe lamă. În acest
caz razele R şi 'R vor fi concentrate într-un punct din planul focal al lentilei. Intensitatea
luminoasă în acel punct depinde de diferenţa de drum δ . Din formula precedentă reiese
că, pentru o lamă dată şi o anumită lungime de undă , diferenţa de drum este funcţie doar
I R 'R
B
C
D
A fig. 6.9
d

225
de r, deci de înclinarea razelor incidente pe lamă. O franjă de interferenţă din planul focal
al lentilei va avea deci forma locului geometric al punctelor corespunzătoare aceleiaşi
valori a unghiului de incidenţă. Ca urmare, figura de interferenţă este compusă din franje
de egală înclinare, care au formă de cercuri concentrice cu centrul în focarul lentilei.
În centrul cercurilor interferă razele care cad normal pe lamă, pentru care i = r = 0,
corespunzând deci unei diferenţe de drum :
2
20
λδ += nd
Centrul figurii corespunde în general unei stări de interferenţă oarecare, diferită de maxim
sau minim.
- Pana optică. Ea constă dintr-un material transparent, delimitat de două suprafeţe plane
care formează între ele un unghi mic α (de ordinul minutelor). Pana optică este în fond o
prismă de unghi foarte mic. Dacă pe pană ajunge un fascicul de lumină monocromatică se
formează chiar pe suprafaţa sa franje de interferenţă a căror formă este o dreaptă paralelă
cu muchia penei, luminoase sau întunecoase, aceeaşi luminozitate corespunzând punctelor
în care stratul subţire are aceeaşi grosime. Din acest motiv franjele obţinute la suprafaţa
penei optice se numesc franje de egală grosime. Pentru lumină monocromatică cu
lungimea de undă λ valoarea interfranjei este dată de relaţia:
αλn
i2
=
unde n este indicele de refracţie al materialului penei.
Relaţia de mai sus se obţine astfel: se consideră două puncte de pe suprafaţa penei în care
grosimea ei are valorile d şi 'd şi presupunem că aceste două puncte aparţin la două franje
paralele vecine. Diferenţa de drum în fiecare din cele cele două puncte, la incidenţă
normală, va fi:
226
2
2λ
δ += nd
2
'2'λ
δ += nd
Franjele din cele două puncte fiind învecinate rezultă că λδδ =−' , de unde:
λ=− )'(2 ddnd
pentru unghiuri mici ale penei optice:
αα ≅−
=i
ddtg
'
unde i reprezintă distanţa dintre cele două puncte, deci după modul în care au fost
considerate cele două puncte această distanţă reprezintă chiar interfranja.
Uitlizând acestă ultimă relaţie se poate scrie:
λα =ind2
din care se obţine tocmai formula dorită:
αλn
i2
=
Diferenţa de drum în cazul franjelor formate pe pana optică fiind mică, face ca
fenomenul să poată fi observat şi în lumină albă, când apar franje de diferite culori.
Coloraţiile strălucitoare ale baloanelor de săpun sau cele care apar după ploaie, când un
strat subţire de ulei se întinde peste apa care mai acoperă asfaltul, sunt datorate franjelor de
egală grosime, observate în lumina albă a zilei.
Este de remarcat, acum la sfârsitul discuţiei despre interferenţă că, în cazul unui surse de
lumină înguste (punct sau fantă), figura de interferenţă este nelocalizată, pe când, în cazul
unor surse întinse, figura de interferenţă este localizată (cazul franjelor de egală înclinare,
localizate la infinit, sau a celor de egală grosime).

227
6.3.2. Difracţia luminii
Una din legile fundamentale ale opticii geometrice este legea propagării rectilinii a
luminii într-un mediu omogen. Conform acestei legi, umbra pe un ecran a unui corp opac
pe care cade lumina ar trebui să fie net separată de regiunea iluminată. Experienţa arată că
acest rezultat este adevărat doar într-o primă aproximaţie şi că în unele cazuri lumina
pătrunde în regiunea umbrei geometrice, iar în afara umbrei apar regiuni luminoase
alternând cu altele întunecoase, adică apar franje de difracţie.
Difracţia este un fenomen caracteristic propagării undelor şi constă în ocolirea de
către lumină a obstacolelor de dimensiuni comparabile cu lungimea sa de undă. Într-un
sens mai larg, prin difracţie se înţelege orice fenomen produs de unde când acestea
întâlnesc în calea lor neomogenităţi ale mediului (de exemplu, ocolirea fantelor,
obstacolelor, a ecranelor, etc.).
Teoria corpusculară nu a putut explica difracţia luminii. Huygens a fost primul
care propus o teorie ondulatorie a luminii. Experimentele de difracţie a luminii se pot
interpreta calitativ prin aplicarea principiului lui Huygens cu privire la propagarea undelor
în spaţiu. Conform acestui principiu, fiecare punct al suprafeţei sferice, care reprezintă
suprafaţa unei unde plecate dintr-un izvor de unde punctiform, este o sursă de unde
secundare elementare în momentul în care este atins de unda primară provenită de la
izvorul punctiform. Înfăşurarea geometrică a tuturor acestor unde elementare se constituie
într-un nou front de undă care se propagă în spaţiu, direcţia de propagare fiind normală la
frontal de undă. Principiul lui Huygens explică pătrunderea luminii în regiunea umbrei
geometrice în cazul difracţiei pe o fantă, pe un obstacol opac şi la marginile unui ecran.
Problemele de difracţie sunt printere cele mai dificile probleme din optică. Datorită
aparatului matematic complicat nu vom discuta în cele ce urmează decât metodele
aproximative folosite în toate cazurile de interes practic.

228
Fenomenul de difracţie care se produce în cazul când sursa de lumină este foarte
îndepărtată, astfel încât razele de lumină sunt practic paralele, se numeşte difracţie în
lumină paralelă sau difracţie Fraunhofer. Difracţia luminii produsă când sursa punctiformă
de lumină este apropiată de obstacol sau fantă (unde sferice), se numeste difracţie în
lumină divergentă sau difracţie Fresnel. În cele ce urmează vom studia doar două cazuri de
interes practic de difracţie în lumina paralelă (Fraunhofer).
6.3.2.1. Difracţia Fraunhofer pe o fantă dreptunghiulară
Fasciculul de lumină care vine de la sursa S (sub formă de fantă perpendiculară pe
planul figurii 6.10) plasată în planul focal al lentilei C (colimator) este transformat în
fascicul paralel de către aceasta, frontul său de undă fiind plan (undă plană). Acest fascicul
paralel cade normal pe un ecran opac în care s-a practicat fanta de lărgime a, ale cărei
margini sunt paralele cu ale fantei sursei.
Ne propunem să găsim care este distribuţia de intensitate (sau amplitudine) în
figura de difracţie de pe ecranul E, care va fi formată din dungi luminoase (maxime) şi
dungi întunecate (minime) paralele cu fanta sursei S.
* S
C F
L
a
P
E
δ
O
fig. 6.10

229
Suprafaţa de undă plană a fantei de laţime a, conform principiului Huygens-Fresnel, este
sediul izvoarelor elementare care emit unde elementare coerente şi în fază, astfel că prin
lentila L, se pot focaliza în punctual P din planul focal E razele paralele după direcţia α .
Diferenţa de drum între razele marginale care pornesc de la fanta F de lărgime a este:
ααδ aa ≈= sin
în care s-a ţinut seama că unghiurile de difracţie sunt mici.
Diferenţa de fază între cele două raze extreme este dată:
αλπ
λπδ
ϕ a22
≈= (6.18)
Pentru a afla intensitatea franjei în punctual P vom împărţi unda plană de pe
suprafaţa fantei F în mici fâşii înguste, paralele cu fanta sursei S şi de lăţimi egale. Fiecare
fâşie din suprafaţa undei din F va trimite în punctual P un fascicul de amplitudine A∆ ,
după direcţia α şi care prezintă diferenţa de fază ϕ∆ faţă de fasciculele alăturate.
Pentru calculul efectiv al intensităţii în punctul P vom folosi metoda fazorială a lui
Fresnel. În reprezentarea fazorială, considerând undele emise de către fâşiile succesive în
aceeaşi direcţie α , vom avea un lanţ de vectori. Lungimile A∆ ale vectorilor vor fi
aceleaşi deoarece fâşiile au dimensiuni egale, iar doi vectori succesivi vor face între ei
acelaşi unghi ϕ∆ (fig. 6.11 a). Ultimul vector va determina cu primul vector unghiul ϕ
dat de relaţia (6.18). Amplitudinea rezultantă este dată de mărimea vectorului OA care
uneşte originea primului vector cu extremitatea ultimului vector. Trecând la limtă pentru
A∆ şi ϕ∆ infinitezimali, ceea ce corespunde unui numar foarte mare de fâşii, lanţul de
vectori se transformă într-un arc de cerc cu unghiul la centru ϕ (fig. 6.11 b).
Menţionăm faptul că razele difractate în direcţia fasciculului incident, şi care vor fi
strânse în punctual O din figura de difracţie, vor da în reprezentarea fazorială un lanţ de
vectori paraleli între ei ),0( o== ϕα , a caror amplitudine rezultantă este A0 (fig. 6.11 c).

230
Mărimea acestei amplitudini corespunde arcului de cerc OA din figura 6.11 b şi, ca
urmare, raza cercului din care face parte arcul de cerc este:
x
f
a
A
a
AAAR
λπ
αλπ
λπδϕ 222
0000 ==== (6.19)
unde s-a ţinut cont de relaţia (6.18), iar afx ≅ reprezintă depărtarea faţă de punctual O a
punctului P din figura de difractie, iar f reprezintă distanţa focală a lentilei L.
Amplitudinea rezultantă în direcţia α este coarda subîntinsă de arcul OA şi are
mărimea:
2
sin2ϕ
RA =
sau, ţinând cont de (6.19):
2
2sin
0 ϕ
ϕ
AA =
Intensitatea fiind proporţională cu pătratul amplitudinii va fi dată de formula:
2
2
02
2
0
)(
sin
)2
(
2sin
xf
a
xf
a
III
λπλπ
ϕ
ϕ
== (6.20)
ϕ
ϕ∆ A
O
A
0,0 == ϕα
O
C ϕ
a
A0
c b fig. 6.11

231
Reprezentarea grafică a intensitaţii în funcţie de x arată că figura de difracţie are maxime si
minime nule aşa după cum se vede în figura 6.12.
Se obţin minime pentru acele valori ale lui x pentru care:
0)sin( =xf
a
λπ
adică: a
fkxλ
= cu k =± 1, ± 2,± 3…..
Pentru k =0 se obţine maximul central deoarece:
1sin
lim2
20 =→ ϕ
ϕ
ϕ şi ca urmare I= I0
Se remarcă următoarele:
- maximul central al figurii de difracţie pe o fantă are lăţimea dublă faţă de maximile
secundare.
- lărgimea maximelor (atât a celui central cât şi a celor secundare) este invers
proporţională cu lărgimea a a fantei.
- intensitatea maximelor secundare scade pe masură ce ne depărtăm de maximul central.
- poziţia maximelor şi minimelor depinde de lungimea de undă. În cazul luminii albe vom
avea un ansamblu de astfel de figuri de difracţie, corespunzând diferitelor culori. Maximul
central este comun pentru toate lungimile de undă, deci el va avea culoarea albă.
I
I0
a
fλ2−
a
fλ−
a
fλ
a
fλ2
O
fig. 6.12

232
6.3.2.2. Difracţia Fraunhofer pe o reţea de difracţie plană
Numim reţea de difracţie sistemul construit dintr-un număr foarte mare de fante
fine, paralele, egale ca lăţime şi echidistante, situate în acelaşi plan. Aceste fante le numim
în mod obişnuit trăsăturile reţelei. Reţeaua de difracţie se realizează cu ajutorul unui vârf
de diamant. Fie o astfel de reţea a cărei porţiune striată are lungimea L (lungimea reţelei) şi
a cărei număr total de trăsături este N. Vom nota cu l constanta reţelei, adică distanţa care
separă două puncte omologe a două fante vecine. Ea este dată de formula: l = L/N, iar
numărul de trasături pe unitatea de lungime n este: n = N/L.
În aparatele spectrale care folosesc reţele de difracţie plane, asupra acestora cade
lumina sub forma unui fascicul paralel provenit de la obiectivul colimator, iar lumina
difractată de reţea este concentrată de o lentilă în planul său focal, unde se observă figura
de difracţie. Fasciculul de lumină paralel cade sub unghiul de incidenţă i faţă de reţeaua de
difracţie, după care fasciculul va fi difractat cu unghiul α şi se va concentra în planul
focal al lentilei, în punctual P.
Diferenţa de drum dintre două raze de lumină difractate de două trăsături vecine ale
reţelei, în cazul în care razele incidente şi cele difractate sunt de aceeaşi parte a normalei,
este dată de formula:
)sin(sin αδ −= il (6.21)
S
i
l
α
α
P
O
E
fig. 6.13

233
iar în cazul în care razele incidente sunt de o parte a normalei, iar cele difractate sunt de
cealaltă parte a normalei:
)sin(sin αδ += il (6.22)
Pentru cazul incidenţei normale pe reţea )0( =i , din ambele relaţii se obţine aceeaşi
valoare a diferenţei de drum:
il sin=δ (6.23)
În cazul reţelei plane avem N fascicule difractate care interferă. Pe ecranul E se vor
forma maxime şi minime cu o structură mai complicată. Pentru a găsi amplitudinea si
intensitatea rezultantă vom folosi construcţia grafică a lui Fresnel: toate cele N trăsături,
identice ca dimensiuni vor interfera în punctual P din planul focal al lentilei cu vibraţii
coerente de amplitudini egale a, unghiul de difracţie fiind acelaşi. Diferenţa de fază între
undele care provin de la oricare două fante succesive, între care există o diferenţă de drum
dată de relaţiile (6.21, 6.22, 6.23), este constantă şi dată de relaţia:
λπδ
ϕ2
=
Prin urmare, diagrama fazorială conduce la un lanţ format din N vectori, lungimea fiecărui
vector fiind egală cu amplitudinea vibraţiei transportate de raza difractată de către o fantă a
reţelei, iar unghiul ϕ dintre direcţiile a doi vectori consecutivi este egal cu diferenţa de
fază între oscilaţiile provenite de la două fante consecutive.
Diferenţa de fază între oscilaţiile din prima şi a N-a rază va fi ϕN . Lungimea vectorului
OA va fi egală cu amplitudinea rezultantă. În figura 6.14, punctul C reprezintă centrul
cercului de rază R, circumscris porţiunii de poligon regulat formată din vectorii
componenţi.

234
Din triunghiul OCA care are unghiul din C egal cu ϕN , se obţine pentru
amplitudinea rezultantă:
2
sin2ϕN
RA =
iar din triunghiul OCD:
2
sin2ϕ
Ra =
deci amplitudinea rezultantă se poate scrie:
2sin
2sin
ϕ
ϕN
aA =
Cea mai mare valoare a lui A se obţine când cei N vectori sunt coliniari. Vom nota
această amplitudine cu A0. Deci: A0 = aN ⋅ , şi deci amplitudinea oscilatiei rezultante în
punctual P se poate scrie:
2sin
2sin
0 ϕ
ϕ
N
N
AA =
Intensitatea fiind proporţională cu pătratul amplitudinii va fi dată de formula:
2
0
2sin
2sin
=ϕ
ϕ
N
N
II (6.24)
O
A
C
D
ϕN
fig. 6.14

235
Din relaţia 6.24 este uşor de văzut că pentru N finit se obţin minime nule de câte ori se
anulează numărătorul fracţiei, deci pentru:
=2
ϕN 0, ±π , ± π2 , …..± πk
În figura de difracţie (fig. 6.15) vom întâlni atât maxime principale de intensitate mare,
maxime secundare de intensitate slabă, cât si minime nule. Între două maxime principale
consecutive se formează (N-1) minime nule şi (N-2) maxime secundare. Maximile
principale au lăţimea dublă faţă de maximile secundare.
Cu cât numărul de trasături ale reţelei este mai mare şi reţeaua are o lungime L mai
mare, cu atât maximile principale vor fi mai intense şi mai subţiri, observabile pe un fond
întunecos, în sensul că maximile secundare devin atât de puţin intense încât în figura de
difracţie de pe ecranul E se observă parctic doar maximile principale foarte intense.
Numărul maxim de ordine care se pot fi obţine de o parte şi de alta a maximului
principal central (k = 0) se poate calcula din condiţia ca diferenţa de drum să aibă valoarea
maximă, deci 1sin =α , ceea ce înseamnă emergenţă razantă, adică:
il(sin ± λmax)1 k=
Numărul maxim de ordine este: 12 max +k .
fig. 6.15

236
Trebuie remarcat şi faptul că intensitatea maximelor principale nu este aceeaşi, ea
scade pe măsură ce ne departăm de maximul numărul zero, adică maximul principal
central.
Dacă iluminăm reţeaua cu lumină albă observăm că maximul principal central se
va forma în acelaşi loc pentu toate lungimile de undă, deci el va avea o culoare albă.
Pentru toate celelalte ordine se obţin spectre de diferite ordine, de ambele părţi ale
maximului principal central, lungimile de undă scurte fiind situate mai aproape de
maximul central.
237
6.3.3. Polarizarea luminii
Lumina este emisă de către atomi şi molecule. Conform teoriei ondulatorii a
luminii acesta este o undă electromagnetică transverslă. O proprietate importantă a undelor
electromagnetice este că intensitatea câmului electric Er
(pe care îl vom numi în
continuare vectorul luminos, deoarece el este cel care produce senzaţia de vedere) şi
inducţia magnetică Br
sunt perpendiculari între ei, iar fiecare dintre ei este în acelaşi timp
perpendicular pe direcţia de propagare a undei luminoase.
Lumina, aşa cum apare în general în natură, este nepolarizată sau naturală. În
cazul luminii naturale toate direcţiile de vibraţie din planul perpendicular pe direcţia undei
luminoase sunt echivalente, amplitudinea vectorului luminos pe toate direcţiile fiind
aceeaşi. Acest rezultat este explicabil dacă ţinem seama că lumina captată de un receptor
provine de la o multitudine de atomi sau molecule în intervalul necesar percepţiei. Să ne
referim pentru simplificare, la lumina monocromatică. Un atom emite un tren de unde, cu
lungimea de undă respectivă, pentru care vectorul luminos are o anumită orientare în
planul perpendicular pe direcţia de propagare. Această emisie durează aproximativ 10-8 s.
La o nouă emisie orientarea vectorului luminos, precum şi faza vibraţiei la un moment dat
nu are nici o legătură cu cele corespunzătoare emisiei precedente, nici cu cele ale emisiilor
simultane provenite de la alţi atomi. Întrucât toate direcţiile din planul perpendicular pe
direcţia de propagare sunt la fel de posibile, iar receptorul sumează pe multitudinea de
atomi şi mediază pe un anumit interval de timp, este explicabil de ce lumina naturală nu
prezintă nici o direcţie privilegiată a vectorului luminos. În figura 6.16 a, planul figurii
reprezintă un plan perpendicular pe direcţia de propagare a luminii naturale, iar fiecare
dreaptă cu săgeţi la capete indică amplitudinea vectorului luminos având această direcţie.

238
Spunem că lumina este liniar polarizată (sau total polarizată) atunci cand printr-un
procedeu oarecare a fost selectată pentru vectorul luminos o singură direcţie de vibraţie în
planul perpendicular pe direcţia de propagare, aşa cum se arată în figura 6.16 b.
Dacă în schimb vectorul luminos vibrează în toate direcţiile din planul
perpendicular pe direcţia de popagare a luminii dar nu are aceeaşi amplitudine în toate
direcţiile, existând două direcţii, una pe care amplitudinea vectorului luminos este minimă
şi una pe care aceasta este maximă, spunem ca lumina este parţial polarizată (fig. 6.16 c).
Evident lumina liniar polarizată reprezintă cazul extrem, pentru care amplitudinea minimă
este nulă. Se defineşte gradul de polarizare P al luminii parţial polarizate conform relaţiei:
minmax
minmax
II
IIP
+−
=
Conform acestei formule gradul de polarizare este nul în cazul luminii naturale şi are
valoarea 1 pentru lumina liniar polarizată. Lumina parţial polarizată poate fi considerată un
amestec de lumină naturală şi de lumină liniar polarizată.
Metode de polarizare a luminii
6.3.3.1. Polarizarea luminii prin reflexie
Polarizarea luminii prin reflexie este cea mai simplă metodă de obţinere a luminii
polarizate. Reflexia pe oglindă produce transformarea luminii naturale în lumină parţial
polarizată, predominând în aceasta vibraţiile perpendiculare pe planul de incidenţă. Se
constată ca pentru diferite unghiuri de incidenţă gradul de polarizare al luminii reflectate
diferă, existând un unghi de incidenţă pentru care lumina reflectată este total polarizată.
fig. 6.16
a b c

239
Pentru reflexia aer - sticlă se constată că polarizarea totală prin reflexie se produce la
unghiul de incidenţă de aproximativ 570.
Brewster a stabilit experimental că în aceste condiţii:
ntgiB =
unde n reprezintă indicele de refracţie relativ al mediului pe care se face reflexia (sticla),
faţă de mediul din care vine lumina (aerul).
Din relaţia de mai sus şi din legea refracţiei rezultă:
ni
itgi
B
BB ==
cos
sin şi n
r
iB =sin
sin
de unde riB sincos =
şi deci 2/π=+ riB
ceea ce arată că în aceste condiţii fasciculul reflectat este perpendicular pe cel refractat.
Unghiul Bi se numeşte unghi de incidentă brewsteriană.
Faptul că, la incidenţă brewsteriană, lumina reflectată de oglindă este total
polarizată, unghiul Bi se mai numeşte şi unghi de polarizare totală.
Experienţa a arătat că la polarizarea totală prin refelxie, deci la incidenţă
brewsteriană, vectorul luminos este perpendicular pe planul de incidenţă al oglinzii pe care
se produce polarizarea. Când unghiul de incidenţă diferă de cel brewserian, fasciculul
reflectat este doar parţial polarizat, vectorului luminos perpendicular pe planul de incidenţă
corespunzându-i amplitudinea maximă. Fasciculul de lumină refractat este, pentru orice
unghi de incidenţă, un fascicul de lumină parţial polarizată, predominând în această lumină
vibraţiile paralele cu planul de incidenţă.
Experimental s-a constatat că la o singură reflexie pe o suprafaţă de sticlă (o placă
plan paralelă) cu n = 1,5, la incidenţă brewsteriană, în fasciculul refractat trece 100 % din
lumina care vibrează paralel cu planul de incidenţă şi 85 % din cea care vibrează

240
perpendicular pe planul de incidentă (deci lumina refractată este parţial polarizată,
preponderenţă având vibraţiile paralele cu planul de incidenţă), restul de 15 % fiind
conţinut în fasciculul reflectat. Prin urmare gradul de polarizare al luminii refractate este
mic dacă se utilizează o singura placă. Utilizând un set de placi plan paralele, şi paralele
între ele, se poate obţine şi în fasciculul refractat un grad de polarizare mult mai mare, iar
pentru un număr suficient de mare de astfel de plăci gradul de polarizare în lumină
refractată se poate considera egal cu unitatea, deci lumina este practic total polarizată.
6.3.3.2. Polarizarea luminii prin dublă refracţie (birefringenţă naturală)
Producerea luminii polarizate se poate realiza cu ajutorul fenomenului de dublă
refracţie, fenomen care are loc în corpurile transparente şi anizotrope (corpuri ale căror
proprietăţi variază cu direcţia). Trecera luminii prin aceste cristale duce la dedublarea razei
luminoase, acest fenomen fiind denumit birefringenţă naturală.
Proprietăţi de anizotropie deosebit de puternice posedă spatul de Islanda (calcitul, o
variantă cristalizată a carbonatului de calciu). Cristalul de calcit cristalizează în sistemul
romboedric cu unghiurile între muchii de 780 '5 , respective 1010 '55 . Cristalul de calcit
poate fi imaginat ca provenind dintr-un cub care a fost turtit după după o diagonală 'AA
astfel încât cele şase feţe pătrate au devenit romburi. Dreapta 'AA constituie o axă de
simetrie de ordinal 3 a romboedrului, întrucât o rotaţie de 1200 în jurul acestei direcţii
readuce cristalul în poziţie identică cu cea iniţială. Această axă cristalografică are şi
proprietăţi optice speciale. Ea poartă denumirea de axă optică a cristalului. Astfel de
cristale, cum este şi calcitul, se numesc cristale optice uniax.
Alte cristale cu mai puţine elemente de simetrie, prezintă două axe optice şi din
această cauză se numesc cristale optice biaxe (cum sunt mica, gipsul, etc.)
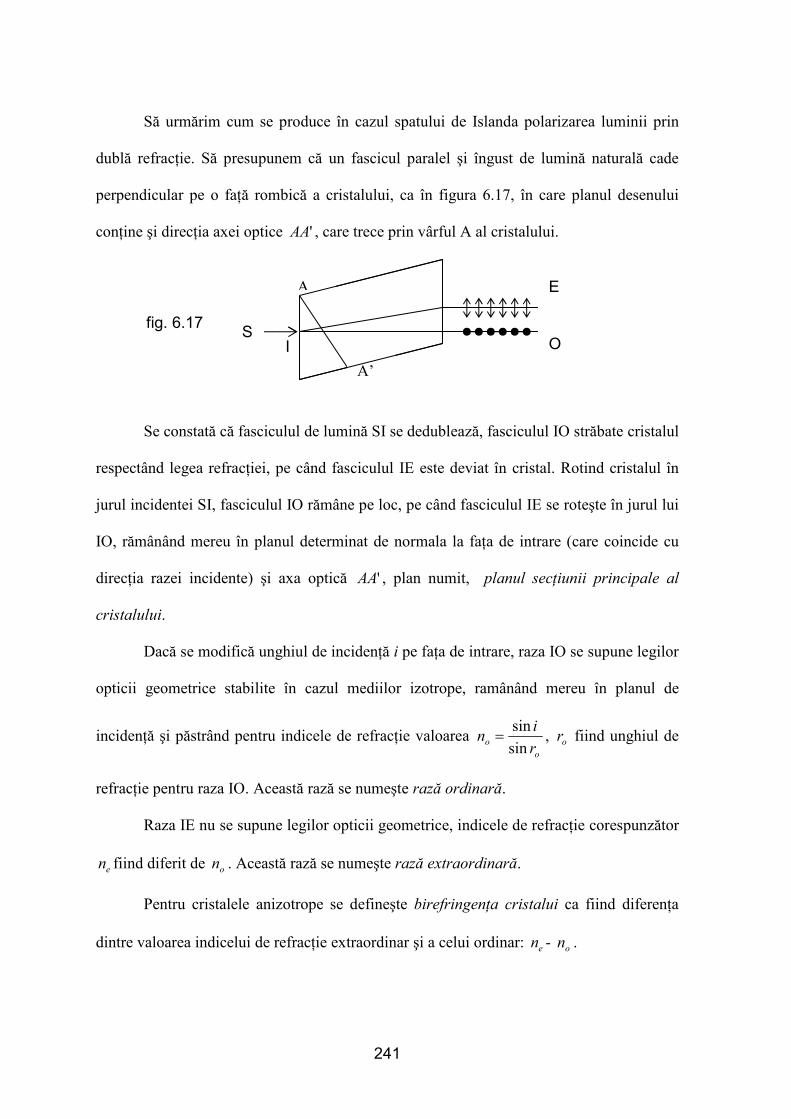
241
Să urmărim cum se produce în cazul spatului de Islanda polarizarea luminii prin
dublă refracţie. Să presupunem că un fascicul paralel şi îngust de lumină naturală cade
perpendicular pe o faţă rombică a cristalului, ca în figura 6.17, în care planul desenului
conţine şi direcţia axei optice 'AA , care trece prin vârful A al cristalului.
Se constată că fasciculul de lumină SI se dedublează, fasciculul IO străbate cristalul
respectând legea refracţiei, pe când fasciculul IE este deviat în cristal. Rotind cristalul în
jurul incidentei SI, fasciculul IO rămâne pe loc, pe când fasciculul IE se roteşte în jurul lui
IO, rămânând mereu în planul determinat de normala la faţa de intrare (care coincide cu
direcţia razei incidente) şi axa optică 'AA , plan numit, planul secţiunii principale al
cristalului.
Dacă se modifică unghiul de incidenţă i pe faţa de intrare, raza IO se supune legilor
opticii geometrice stabilite în cazul mediilor izotrope, ramânând mereu în planul de
incidenţă şi păstrând pentru indicele de refracţie valoarea o
or
in
sin
sin= , or fiind unghiul de
refracţie pentru raza IO. Această rază se numeşte rază ordinară.
Raza IE nu se supune legilor opticii geometrice, indicele de refracţie corespunzător
en fiind diferit de on . Această rază se numeşte rază extraordinară.
Pentru cristalele anizotrope se defineşte birefringenţa cristalui ca fiind diferenţa
dintre valoarea indicelui de refracţie extraordinar şi a celui ordinar: en - on .
I
E
A’
A
fig. 6.17 S
O

242
În cazul în care lumina se propagă în cristal pe direcţia axei optice, se constată că
en = on , cele două fascicule care corespund aceleiaşi raze incidente, propagându-se după
aceeaşi direcţie. În aceste condiţii dispare dubla refracţie, deci birefringenţa cristalului
devine nulă.
Dacă fasciculul SI este suficient de îngust şi cristalul suficient de gros, cele două
fascicule IO şi IE ies din cristal deplaste şi chiar separate complet, fiind paralele între ele
dacă faţa de ieşire a cristalului este paralelă cu cea de intrare a luminii în cristal, ca şi în
figura 6. 17.
În ceea ce priveşte starea de polarizare a fasciculelor IO şi IE, se constată că
ambele fascicule sunt liniar polarizate, având planele de vibraţie perpendiculare între ele.
Vibraţiile ordinare sunt perpendiculare pe planul principal al razei ordinare, iar vibraţiile
extraordinare sunt conţinute în planul principal ar razei extraordinare. Prin plan principal al
razei ordinare se înţelege planul determinat de axa optică şi de raza ordinară, iar prin plan
principal al razei extraordinare cel determinat de axa optică şi de raza extraordinară.
6.3.3.3. Dispozitive pentru obţinerea luminii liniar polarizate
Prisme polarizatoare
Este dificil de reuşit cu un singur cristal birefringent să separăm complet cele două
fascicule de lumină emergente total polarizate, cel ordinar şi cel extraordinar, chiar dacă
fasciculul de lumină este suficient de îngust şi utilizăm cristale mai groase. Din acest motiv
s-a apelat la combinaţii de cristale birefringente, cu ajutorul cărora să se obţină un fascicul
emergent liniar polarizat, de lărgime suficient de mare şi luminozitate bună.
Aceste prisme sunt de două categorii:
- prisme care transmit ambele fascicule liniar polarizate, atât cel ordinar cât şi cel
extraordinar, dar în direcţii suficient de diferite pentru a putea fi utilizat doar un fascicul.
243
- prisme care transmit doar unul dintre fasciculele liniar polarizate, eliminându-l pe
celălalt.
Pentru exemplificare, vom descrie, din prima categorie, prisma Rochon, iar din a
doua categorie prisma Nicol, numită curent nicol.
1. Prisma Rochon este confecţionată din spat de Islanda sau din cuarţ. Se compune din
două jumătăţi tăiate astfel încât se aibă axele optice orientate în direcţii perpendiculare.
Cele două jumătăţi sunt alipite cu glicerină sau ulei de ricin. Dacă un fascicul de lumină
albă cade normal pe faţa de intrare a prismei pătrunzând în cristal în lungul axei optice,
suferă fenomenul de dublă refracţie la suprafaţa de separare a celor două prisme ale
dispozitivului. Fasciculul ordinar, liniar polarizat, iese nedeviat prin prisma Rochon, iar
fasciculul de lumină extraordinar iese colorat şi suficient de deviat pentru a putea fi
îndepărtat prin diafragmare.
2. Prisma Nicol este obţinută dintr-un cristal de spat de Islanda alungit. Mai întâi, prin
şlefuire şi polişare, se modifică uşor orientarea feţelor, astfel încât feţele să formeze
unghiuri de 48o cu axa optică a cristalului. Apoi se taie cristalul în două. Pentru o lungime
convenabil aleasă a cristalului planul tăieturii este perpendicular pe feţele şlefuite. Se obţin
astfel două prisme geometrice, cu secţiunea în formă de triunghi dreptunghic, care se
alipesc cu balsam de Canada sau glicerină. Indicele de refracţie al balsamului de Canada
are o valoare cuprinsă între en şi on . Raza ordinară se reflectă total pe stratul de balsam de
Canada, pe când raza extraordinară, mai puţin deviată şi corespunzându-i alt indice de
refracţie, străbate mai departe prisma, ieşind singură din ea. Se obţine astfel un fascicul de
lumină liniar polarizat.
244
Polaroizi
Polaroizii (geamurile polaroizi) sunt geamuri pe care s-a depus un strat de gelatină,
în care sunt înglobate cristale fine de herapatit (iodosulfat de chinină) orientate în acelaşi
sens prin metode mecanice sau electrice. Aceste cristale prezintă fenomenul de dicroism
(ca şi cristalele de turmalină): raza incidentă se descompune în cele două raze, ordinară şi
extraordinară, însă din cristal iese doar raza extraordinară, cea ordinară fiind puternic
absorbită de cristalul însuşi. Polaroizii, deşi nu au aceeaşi eficacitate optică în domeniile
extreme ale spectrului vizibil ca şi prismele polarizatoare, sunt totuşi mult întrebuinţaţi
deoarece se pot construi uşor pe suprafeţe mari, obţinându-se fascicule largi de lumină
liniar polarizate.
6.3.3.4. Birefingenţă artificială
Unor materiale natural izotrope li se pot provoca pe diferite căi o anizotropie, care
în general, nu are aceeaşi valoare în orice punct al mediului, materialul devenind astfel
anizotrop, dar, în acelaşi timp materialul este şi neomogen. Dacă o acţiune exterioară
creează o direcţie pronunţat preferenţială într-un material iniţial izotrop, pe cale mecanică,
electrică sau magnetică, această direcţie poate deveni axă optică a materialului, devenit
astfel anizotrop. Dintre cazurile de birefingenţă artificială (sau provocată) amintim:
1. Birefingenţa mecanică. Un corp izotrop transparent supus unor deformări mecanice, de
exemplu de întindere sau comprimare, şi întrodus între nicoli încrucişaţi, ne arată ca el a
devenit anizotrop din punct de vedere optic şi se comportă ca şi un cristal uniax, având axa
optică îndreptată după direcţia efortului maxim. Orice piesă supusă unor solicitări
mecanice suferă deformarea nu numai după direcţia de acţionare a forţei solicitatoare,
piesa se deformează şi după o direcţie perpendiculară pe aceasta. Se pun astfel în evidenţă
efortul maxim P şi, perpendicular pe acesta, efortul minim Q, care se numesc şi tensiunile

245
principale. Birefringenţa provocată ( en - on ) este proporţională cu diferenţa tensiunilor
principale:
( en - on ) = )( QPC −λ
unde C se numeşte constantă fotoelastică, iar λ este lungimea de undă a radiaţiei
întrebuinţate.
Aşezând piesa de cercetat astfel ca direcţia efortului maxim P sa fie la 45o faţă de
nicolii încurcişaţi, se obţin o serie de franje colorate în cazul în care tensiunile nu se
repartizează uniform în piesă. Franjele de aceeaşi culoare - izocromele - corespund la
aceleaşi valori ale birefingenţei, deci la aceleaşi valori ale diferenţei tensiunilor principale
P – Q. În felul acesta se pot dimensiona în mod raţional piesele mecanice ale căror modele
realizate din plexiglas se studiază prin această metodă, numită fotoelasticitate. Şi piesele
de sticlă prost răcite, având tensiuni interioare, sau masele plastice, se pot cerceta cu
dispozitive fotoelastice.
2. Birefingenţă electrică (efectul Kerr) reprezintă birefringenţa provocată unor materiale
(lichide şi gaze) sub acţiunea unui câmp electric. Efectul câmpului electric (sau efectul
Kerr) decurge practic fără inerţie, ceea ce a condus la numeroase aplicaţii ale celulelor
Kerr pentru comanda intensităţii fasciculelor de lumină.
Celula Kerr este de regulă umplută cu nitrobenzen, în care sunt cufundaţi doi
electrozi plani, constituind un condensator plan, putându-se astfel aplica un câmp electric
uniform. Între nicoli încrucişaţi, în absenţa câmpului electric, lumina nu trece prin sistem.
La aplicarea câmpului electric, lichidul din zona condensatorului electric se comportă ca şi
un cristal uniax, cu direcţia axei optice în direcţia câmpului electric, lumina fiind lăsată să
treacă într-o proporţie depinzând de intensitatea câmpului. Efectul va fi maxim când
direcţia câmpului electric va fi la 45o faţă de direcţiile de vibraţie permise de nicolii

246
încrucişaţi. Experienţa arată că birefingenţa provocată este proporţionlă cu pătratul
intensităţii E a câmpului electric:
2kEnn oe =−
Ca urmare, diferenţa de fază dintre vibraţiile extraordinară şi ordinară, după
străbaterea lungimii l a zonei aflată în câmp electric, va fi:
λ
πλ
πλδ
πϕ2
2)(
22lkEnnl oe =
−==
sau: 22 BlEπϕ =
unde constanta de material B, denumită constanta Kerr, scade cu creşterea temperaturii.
Pentru majoritatea lichidelor birefingenţa este pozitivă, deşi există şi unele (eter
eticlic, unii alcooli sau unele uleiuri) pentru care birefingenţa este negativă.
3. Birefingenţă magnetică (efectul Cotton – Mouton). Se poate provoca birefingenţă
artificială şi prin aplicarea unor câmpuri magnetice exterioare. Aplicarea unui câmp
magnetic suficient de intens, perpendicular pe direcţia de propagare a luminii, face ca
mediul să devină anizotrop.
La aplicarea câmpului magnetic mediul capătă proprietăţi optice asemănătoarte cu
cele ale unui cristal uniax, cu direcţia axei optice pe direcţia câmpului magnetic.
Birefingenţa indusă fiind proporţională cu pătratul intensităţii câmpului magnetic H :
2kHnn oe =−
Ca urmare diferenţa de drum satisface relaţia:
2)(ClH
nnl oe =−
=λλ
δ
raportul λk
C = este numită constanta Cotton – Mouton a materialului, după numele celor
care au descoperit fenomenul.

247
6.3.3.5. Polarizaţia rotatorie
Am arătat în paragrafele precedente că o lamă dintr-un cristal uniax tăiată
perpendicular pe axa optică nu produce fenomenul de birefingenţă la incidenţa normală a
luminii pe ea. Dacă introducem o astfel de lamă între nicoli încrucişaţi (polarizatori
perpendiculari) este de aşteptat să se producă completa extincţie a luminii care se propagă
în lungul axei optice. Aşa se petrec lucrurile în cazul marii majorităţi a cristalelor uniaxe,
însă dacă lama este din cuarţ, tăiată perpendicular pe axa optică, introdusă între nicoli
încrucişaţi, se constată experimental că o parte din lumină trece prin sistem. Acest lucru se
explică prin faptul că lama de cuarţ a rotit planul de vibraţie a luminii liniar polarizate
transmisă de primul nicol, astfel încat cei doi nicoli se comportă ca şi cum nu ar mai fi
încrucişaţi, şi deci, o parte din lumina provenită de la primul nicol poate trece prin al
doilea nicol.
Acest fenomen prin care unele medii rotesc planul de vibraţie al luminii liniar
polarizate care trece prin ele poartă numele de polarizaţie rotatorie.
Fenomenul de polarizaţie rotatorie se întâlneşte la unele cristale birefringente, cum
este şi cazul cuarţului, dar şi la alte cristale din sistemul cubic, ca de exemplu cloratul de
sodiu, la anumite solide amorfe, la unele lichide pure sau la soluţiile unor substanţe
organice.
O binecunoscută substanţă optic activă este şi zaharoza. Unghiul de rotaţie al
planului de vibraţie α este proporţional cu distanţa strabătută de lumină prin acel mediu l,
şi depinde de o constată specifică mediului, numită polarizaţie rotatorie specifică ][α ,
care la rândul ei depinde puternic de lungimea de undă a luminii liniar polarizate care trece
prin mediul dat. De exemplu, pentru cuarţ polarizaţiea rotatorie specifică este de
aproximativ 15o/mm pentru roşu şi de 51o/mm pentru violet. În soluţia de zahăr, unghiul de
248
rotaţie este proporţional cu concentraţia c de zahăr în apă. Relaţia dintre unghiul de rotaţie
şi concentraţia de zahăr în apă, numită şi legea lui Biot (1831) este:
lc ⋅⋅= ][αα
Rotirea planului de polarizaţie se poate face spre dreapta observatorului – substanţe
optic active dextrogire, sau spre stânga – substanţe optic active levogire.
Polarimetrele sunt aparate care conţin polarizori pentru măsurarea unghiului de
rotaţie produs de soluţiile de zahăr sau alte substanţe optic active; cu ajutorul acestora se
pot face analize polarimetrice cu privire la concentraţia în soluţii a substanţelor optic
active.

249
6.4. Optica fotonică
Teoria ondulatorie a luminii dă o descriere completă a tuturor fenomenelor care
se referă la interacţiunea lumină – lumină, cum se întâmplă în cazul interferenţei şi
difracţiei. Când încercăm însă să tratăm interacţiunea luminii cu substanţa, ca în cazul
emisiei şi absorbţiei luminii, în cel al efectului fotoelectric, etc, apar serioase dificultăţi. În
aceste cazuri nu apar numai uşoare deosebiri între teorie şi experiment, care sunt
detectabile prin determinări cantitative, ci teoria prevede rezultate radical diferite decât
cele obţinute experimental.
O serie de fenomene descoperite şi studiate la sfârşitul secolului al XIX-lea şi
începutul secolului XX nu au putut fi explicate cu ajutorul teoriei ondulatorii a luminii,
ceea ce a impus introducerea unor noi concepte, pe baza cărora s-a constituit mai târziu
teoria fotonică a luminii. Amintim aici eforturile facute pentru explicarea distribuţiei de
energie în spectrul corpului negru, eforturi care au condus în 1900 la introducerea de către
Planck a noţiunii de cuanată de energie, deoarece teoria electromagnetică conjugată cu
teoria clasică a echipartiţiei energiei nu au putut explica distribuţia în spectrul de energie
observat experimental. Introducerea de către Max Planck a conceptului de cuantă de
energie reprezintă începutul unei noi teorii asupra luminii, teorie care va evidenţia
caracterul discontinuu al luminii, având la bază noţiunea de foton. Acestată nouă teorie
poartă numele de teoria fotonică a luminii.
În cadrul teoriei fotonice au putut fi explicate o serie de fenomene petrecute la
intercaţiunea luminii cu substanţa, printre care, efectul fotoelectric, efectul Compton,
presiunea luminii, etc. Tocmai la aceste fenomene ne vom referi în cele ce urmează,
încercând să punem în evidenţă necesitatea elaborării teoriei fotonice a luminii pentru
explicarea acestora.

250
6.4.1. Efectul fotoelectric
Efectul fotoelectric constă în emisia de electroni de către corpurile solide sub
acţiunea luminii. Descoperirea efectului fotoelectric i se atribuie lui Hertz (1888) care a
observat că producerea scânteii electrice între doi electrozi de Zn este mult uşurată dacă
unul din electrozi este iluminat cu lumină ultravioletă.
Există două feluri de efecte fotoelectrice:
- extern, în care, sub influenţa luminii, substanţa emite electroni şi
- intern, în care creşte energia electronilor care interacţionează cu lumina, dar aceştia nu
părăsesc substanţa, ci paticipă la conducţie (fenomen care se produce în semiconductoare).
În cele ce urmează ne vom referi la efectul fotoelectric extern. Figura 6.18 indică
schema experimentală pentru studierea legilor efectului fotoelectric.
Într-un tub de curaţ vidat T sunt introduşi doi electrozi. Catodul K constă dintr-o
placă metalică iar anodul A este de obicei un inel de nichel. Montajul electric permite
K A
V
G
T
fig. 6.18

251
polarizarea pozitivă sau negativă a anodului A faţă de catod. Tensiunea între A şi K se
măsoară cu voltmetrul V iar intensitatea curentului care circulă între aceşti electrozi este
măsurată cu galvanometrul G. Se polarizează anodul pozitiv faţă de catod şi se constată că,
atâta vreme cât fotocelula este la întuneric, galvanometrul nu indică existenţa unui curent.
Iluminând catodul cu lumină monocromatică de lungime de undă potrivit aleasă, între A şi
K se stabileşte, practic instantaneu, un curent de electroni, numit fotocurent, indicat de
galvanometrul G. Aceasta arată că sub acţiunea luminii electronii sunt scoşi din metalul
catodului şi în prezenţa câmpului electric sunt orientaţi spre anod.
Măsurând pentru acelaşi flux luminos 1Φ , dependenţa intensităţii curentului
fotoelectric de tensiunea aplicată electrozilor se obţine o curbă de felul celei din figura
6. 19. Mărind fluxul incident, curentul prin fotocelulă se măreşte, obţinându-se curbele
prezentate în figură pentru 3Φ > 2Φ > 1Φ .
Din analiza curbelor caracteristice curent - tensiune se pot trage următoarele
concluzii:
- pentru tensiunea zero între electrozi (U = 0), fotocurentul I este diferit de zero. Acest
lucru arată că o parte din cei mai rapizi electroni reuşesc sa ajungă la anod fară nici o
tensiune de accelerare.
U0 0 U
I IS3
IS2 IS1
3Φ
2Φ
1Φ fig. 6.19

252
- pentru a anula curentul este necesară aplicarea unei tensiuni inverse pe electrozi (catodul
mai pozitiv decât anodul) de mărime U0, numită tensiune de frânare. Valoarea tensiunii de
frânare dă o masură a energiei cinetice maxime a electronilor care părăsesc catodul,
deoarece între energia cinetică maximă şi tensiunea de frânare există relaţia:
0max, eUEc = (6.25)
dedusă pe baza legii conservării energiei.
- tensiunea de frânare depinde liniar de frecvenţa radiaţiei cu care se iluminează catodul
(fig. 6.20) şi la o anumită frecvenţă 0ν , numită frecvenţă de prag, ea se anulează. Deci
pentru frecvenţe ν < 0ν efectul fotoelectric nu se mai produce.
- la tensiuni pozitive între A si K intensitatea fotocurentului creşte odată cu tensiunea,
deoarece câmpul electric dintre electrozi, din ce în ce mai intens, antrenează un număr din
ce în ce mai mare de electroni către anod. La valori suficient de mari ale tensiunii,
intensitatea atinge valoarea de saturaţie IS, care este proporţională cu mărimea fluxului
luminos pe catod (fig. 6.19). Curentul de saturaţie corespunde situaţiei în care toţi electroni
emişi în unitatea de timp de către anod ajung la catod.
Toate aceste constatări au condus la următoarele legi ale efectului fotoelectric:
I. La frecvenţă constantă, intensitatea curentului fotoelectric de saturaţie este direct
proporţională cu fluxul luminos incident.
U0
0ν ν 01ν 02ν 03ν ν
Ec,max
fig. 6.20 fig. 6.21
1 2 3
253
Dacă se modifică frecvenţa radiaţiilor incidente, se găseşte că energia cinetică
maximă a elecronilor, calculată cu (6.25) creşte liniar cu creşterea frecvenţei (fig. 6.21)
pentru orice valoare a fluxului incident. În figură, familia de drepte paralele (1, 2, 3)
prezintă o astfel de dependenţă pentru catozi din materiale diferite. Rezultă cea de-a doua
lege a efectului fotoelectric:
II. Energia cinetică a fotoelectronilor emişi creşte liniar cu frecvenţa luminii incidente şi
nu depinde de mărimea fluxului luminos.
Analizând figurile 6. 19 şi 6. 20 se poate formula legea a treia:
III. Efectul fotoelectric se poate produce numai dacă frecvenţa luminii incidente este cel
putin egală cu o frecvenţă de parg 0ν (denumită şi pragul roşu al efectului fotoelectric).
Măsurându-se intervalul de timp care se scurge din momentul iluminării catodului
până la apariţia fenomenului, s-a găsit că el este mai mic decăt 10-9 s şi, ca urmare, s-a
formulat legea a patra a efectului fotoelectric:
IV. Efectul fotoelectric se produce practic instantaneu.
6.4.2. Teoria fotonică a luminii
Legile experimentale ale efectului fotoelectric enunţate mai sus sunt în contradicţie
cu teoria ondulatorie a luminii, care explică efectul fotoelectric astfel: unda
electromagnetică luminoasă produce oscilaţii forţate ale electronilor cu o amplitudine
proporţionlă cu amplitudinea undei incidente. Dacă forţele care ţin electronii în interiorul
materialului nu sunt prea mari, electronii pot fi expulzaţi cu o viteză proporţională cu
amplitudinea luminii incidente, implicit cu intensitatea luminii. Această concluzie a teoriei
electromagnetice a luminii a fost infirmtă de experienţă în cazul efectului fotoelectric.
Conform teoriei ondulatorii, efectul fotoelectric ar trebui să se producă pentru orice
frecvenţă a luminii, cu condiţia ca intensitatea luminii să fie suficient de mare. De

254
asemenea, ar trebui să existe un decalaj între momentul iluminării suprafeţei emisive şi cel
al emisiei, timp în care electronul ar trebui să acumuleze energie suficientă pentru a parăsi
metalul.
La baza teoriei fotonice a luminii stă conceptul de foton. În anul 1905, Albert
Einstein a arătat că toate legile efectului fotoelectric se pot explica imediat dacă
presupunem că lumina este formată dintr-un flux de particule de energie foarte mică,
numite fotoni.
Energia fotonilor ε este dată de relaţia:
νε h= (6.26)
unde ν este frecvenţa luminii, iar h = 6,625.10-34 J.s, este o constantă universală,
cunoscută azi sub denumirea de constanta lui Planck.
Alături de energie, ca oricare altă particulă, fotonul trebuie să aibă şi impuls.
Ţinând seama de relaţia (din teoria relativităţii) care dă echivalenţa dintre masă şi energie:
E = mc2
şi luând în considerare relaţia (6.26), se obţine masa de mişcare a fotonului:
2c
hm
ν=
Dacă avem în vedere relaţia dintre masa de mişcare m şi masa de repaus m0:
2
2
0
1c
v
mm
−
=
şi tinând sema de faptul că fotonul se deplasează în vid cu viteza luminii, rezultă că:
00 =m
deci noţiunea de masă de repaus a fotonului nu are sens, fotonul neavând referenţial
propriu (el se deplasează cu aceeaşi viteză c faţă de orice referenţial inerţial).
Impulsul fotonului este:

255
λ
νν h
c
hc
c
hmcp ====
2
unde ν
λc
= este lungimea de undă.
6.4.3. Explicarea legilor efectului fotoelectric
Pentru explicarea efectului fotoelectric, Einstein presupune că la ciocnirea
fotonului cu electronul, fotonul cedează acestuia întrega sa energie. Electronul cheltuieşte
o parte din energia primită pentru a ieşi din metal, iar restul se regăseşte sub formă de
energie cinetică. Din legea conservării energie se scrie:
2
2mvLh +== νε (6.27)
În această relaţie, cunoscută sub numele de ecuaţia lui Einstein, νh este energia
absorbită de la foton, 2
2mvreprezintă energia cinetică a fotoelectronului extras, iar L este
lucrul mecanic de extracţie al electronului din catod, mărime ce depinde de materialul din
care este făcut catodul.
Cu ajutorul ecuaţiei lui Einstein se pot explica uşor legile efectului fotoelectric. Fiind
vorba de interacţiunea dintre două particule, fotoelectronii apar instantaneu, indiferent de
fluxul luminos, adică independent de numărul fotonilor incidenţi (legea a IV-a).
Creşterea fluxului incident implică creşterea numărului de fotoni incidenţi de egală
energie, ceea ce duce la creşterea numărului de fotoelectroni emişi şi, implicit, la creşterea
valorii de saturaţie a curentului fotoelectric (legea I-a).
Din ecuaţia lui Einstein se obţine:
Lhmv
−= ν2
2

256
ceea ce arată ca energia cinetică a electronilor emişi variază liniar cu valoarea frecvenţei
luminii incidente (legea a II-a).
Energia νh a fotonilor este cu atât mai mică cu cât frecvenţa este mai mică, ceea
ce conform ecuaţiei lui Einstein, duce la micşorarea energiei cinetice a electronilor emişi.
Pentru o anumită frecvenţă 0ν , de parg, energia cinetică a fotoelectronilor este nulă. Pentru
această frecvenţă ecuaţia lui Einstein devine:
Lh =0ν
Energia absorbită în acest caz serveşte doar pentru efectuarea lucrului mecanic de
extracţie. Deci pentru frecvenţeν < 0ν efectul fotoelectric nu se mai produce (legea a III-a).
Cu tot acest succes obţinut prin explicarea efectului fotoelectric, teoria fotonică a
luminii nu a fost unanim recunoscută decât în urma experienţelor de împrăştiere a razelor
X efectuate de Compton.
6.4.4. Efectul Compton
Confirmarea deplină a naturii corpusculare a luminii a fost dată de către A. H.
Compton în anul 1923 prin descoperirea efectului care-i poartă numele. În 1923 Compton
a studiat împrăştierea radiaţiilor X pe atomi uşori. Un fascicul îngust de raze X cu
lungimea cunoscută 0λ , cade pe o ţintă de grafit (sau o altă ţintă). Razele X împrăştiate
sub un unghi θ faţă de direcţia iniţială sunt analizate pentru a li se cunoaşte lungimea de
undă şi intensitatea. În urma acestui experiment Compton observă următoarele:
- pe lângă radiaţia cu lungimea de undă incidentă 0λ , mai apare a doua radiaţie de lungime
de undă λ , cu atât mai mare decât 0λ , cu cât unghiul de împrăştiere este mai mare.
- comportamentul este acelaşi, indiferent de natura ţintei. Experimental el a stbilit că:
)cos1(0 θλλ −=− a
257
unde a este o constantă cu valoarea 2,426 pm.
Efectul Compton nu poate fi explicat în cadrul teoriei ondulatorii, în conformitate
cu care la împraştierea radiaţiei luminoase se schimbă doar distribuţia spaţială a
intensitaţii, nu şi lungimea de undă.
Explicaţia efectului Compton a fost dată pe baza teoriei fotonice, considerându-se
că la împraştierea razelor X are loc o interacţiune între foton şi electronul substanţei ţintă,
ţinându-se cont de legile de conservare ale energiei şi impulsului.
Presupunând că, înaine de ciocnirea cu fotonul, electronul era în stare de repaus, şi
notând cu 0ν frecvenţă fotonului incident şi cu ν frecvenţa fotonului imprăştiat sub
unghiul θ , legea conservării energie se scrie:
LEhh c ++= νν 0 (6.28)
unde 0νh este energia fotonului incident, νh este energia fotonului împrăştiat, cE energia
cinetică a electronului în urma ciocnirii şi L lucrul mecanic de ieşire a electronului din
materialul ţintei.
Ţinând seama că energia fotonului incident este mult mai mare decât lucrul
mecanic de ieşire (în experienţa lui Compton de 1550 ori), în relaţia 6.28, L poate fi
neglijat, ca şi cum electronul ar fi liber.
Considerând L =0 şi ţinând seama de relaţia 20
2 cmmcEc −= din teoria relativităţii,
relaţia 6.28 se scrie:
20
20 cmmchh −+= νν
sau:
200
2 )( cmhmc +−= νν (6.29)
Urmărind figura 6.22, care redă conservarea impulsului, putem scrie:
eppprrr
+=0

258
unde 0pr
şi pr
reprezintă impulsurile fotonului înainte şi după ciocnire, fotonul fiind
împrăştiat sub unghiul θ , iar epr
este impulsul electronului după interacţiune, el fiind
împrăştiat sub unghiul ϕ faţă de direcţia fascicului incident de raze X.
Tinând seama că: c
hp 0
0
ν= ,
c
hp
ν= , mvpe = şi luând în considerare triunghiul
impulsurilor din figura 6.22, rezultă:
θνννν
cos2
20
2
2
22
2
20
222
c
h
c
h
c
hvm −+=
sau θνννν cos2 02222
02222 hhhcvm −+= (6.30)
Ridicând la pătrat relaţia (6.29), se obţine:
420
2000
22220
242 )(22 cmcmhhhhcm +−+−+= νννννν (6.31)
Scăzând din (6.31) ecuaţia (6.30), rezultă:
420
2000
222242 )(2)cos1(2 cmcmhhcvmcm +−+−−=− ννθνν
care se poate scrie sub altă formă dacă se ţine seama de relaţia dintre masă şi viteză din
teoria relativităţii )1(2
222
0c
vmm −= , şi anume:
420
2000
2420 )(2)cos1(2 cmcmhhcm +−+−−= ννθνν
sau: )cos1(2)(2 022
00 θνννν −=− hcmh
Împărţind relaţia anterioară cu cmh 002 νν , rezultă:
)cos1()(
00
0 θνν
νν−=
−
cm
hc
pr
θ 0pr
ϕ
epr
fig. 6.22

259
sau 2
sin2 2
00
θλλ
cm
h=−
Deci variaţia λ∆ a lungimii de undă în efectul Compton este:
2
sin2 2 θλ Λ=∆
unde cm
h
0
=Λ se numeşte lungime de undă Compton.
Variaţia de lungime de undă obţinută, dedusă din ipoteza fotonică a luminii,
confirmă observaţiile experimentale:
- variaţia λ∆ a lungimii de undă este independentă de natura substanţei ţintă, în expresia
sa intrând doar constantele universale h, c şi m0.
- variaţia lungimii de undă se schimbă o dată cu modificarea unghiului de împrăştiere,
având valorile extreme, zero pentru 0=θ şi Λ2 pentru 180=θ 0.
- când particula care interacţionează cu fotonul este un electron, lungimea de undă
Compton are valoarea 426,2==Λ a pm, aşa cum s-a stabilit şi experimental. Pentru alte
particule cu mase de repaus mai mari decât ale electronului, lungimea de undă Compton ia
valori foarte mici, de cele mai multe ori neglijabile faţă de lungimea de undă a radiaţiei
incidente.
În concluzie, efectul Compton a contribuit la fundamentarea teoriei fotonice a
luminii, confirmând în mod stralucit că fotonul are impuls.
260
6.5. Absorbţia şi dispersia luminii
6.5.1. Absorbţia luminii
Lumina este absorbită mai mult sau mai puţin prin trecerea ei printr-un mediu
oarecare. Absorbţia nu este aceeaşi pentru toate radiaţiile, deci este selectivă. Astfel, sticla
este transparentă şi incoloră în vizibil deoarece absoarbe radiaţiile în vizibil mai puţin, în
schimb, ea este foarte absorbantă pentru undele ultraviolete.
Să presupunem că un fascicul de lumină monocromatică străbate perpendicular un
strat de substanţă cu grosimea infinit mică dx. Dacă la intrarea în strat intensitatea luminii
este I, prin străbaterea acestuia intensitatea variază cu dI, astfel încât:
IdxdI α−=
Semnul minus arată ca lumina este slăbită prin fenomenul de absorbţie în substanţa
străbătută. Slăbirea provocată de străbaterea unui strat de grosime finită x poate fi obţinută
prin integrarea relaţiei anterioare:
∫∫ −=xI
I
dxI
dI
00
α
care conduce la:
xeII ⋅−= α0
În această relaţie, numită şi legea Bouguer-Lambert, 0I reprezintă intensitatea
luminii la intrarea în strat, iar I intensitatea la ieşirea din strat. Constanta de material
α este numită coeficient de absorbţie. Valoarea acestuia depinde de substanţa absorbantă
şi de lungimea de undă a radiaţiei monocromatice. Pentru radiaţiile în vizibil 510−≅α m-1
pentru aer şi 210−≅α m-1 pentru sticlă.
Micşorarea intensităţii fasciculului luminos prin străbaterea materialului poate fi
datorată transformării energiei luminoase în altă formă de energie, caz în care avem de-a
261
face cu fenomenul de absorbţie propru zisă, sau împrăştierii luminii în alte direcţii decât
cea a fascicului incident.
Dacă substanţa absorbantă este dizolvată într-un solvent transparent, slăbirea
intensităţii depinde de numărul de molecule absorbante întâlnite de fasciculul luminos,
astfe încât coeficientul de absorbţie α este proporţional cu concentraţia c a substanţei:
εα = c
unde constanta ε , numită coeficient de extincţie, depinde de asemenea de substanţa
absorbantă şi de lungimea de undă a luminii, fiind independentă de concentraţia c.
În aceste condiţii legea Bouguer-Lambert devine:
xceII ⋅⋅−= ε0
relaţie cunoscută uzual sub numele de legea Lambert-Beer.
Atunci când în soluţie au loc reacţii chimice depinzând de concentraţia c, de
exemplu asociaţii moleculare favorizate de creşterea concentraţiei, ε încetează să mai fie
independent de concentraţie, apărând abateri de la legea Lambert-Beer.
Întrucât α , şi respectiv ε , depind de lungimea de undă, compoziţia spectrală a
luminii transmise print-un strat de substanţă diferă funcţie de compoziţia spectrală a
luminii incidente. Toate materialele transparente şi colorate absorb o parte a spectrului
vizibil. Astfel, dacă lumina emisă de un filament incandescent este lăsată să trecă printr-o
placă de sticlă verde, aceasta va absorbi în oarecare măsură radiaţiile din domeniile roşu şi
albastru-violet ale spectrului vizibil, lumina transmisă aparând observatorului ca lumină
verde.
Cu ajutorul unui aparat spectral cu prismă se poate obţine spectrul de absorbţie al
unui material. Gazele atomice rarefiate au spectre de absorbţie de linii, lungimile de undă
absorbite fiind egale cu unele dintre lungimile de undă pe care gazul respectiv le emite
când este excitat (prin producerea unor descărcări electrice, aducerea la temperatură înaltă,
262
etc.). Spectrul de absorbţie al unui gaz atomic are însă mai puţine linii decât cel de emisie
al aceluiaşi gaz, deoarece sunt absorbite numai radiaţii care corespund tranziţiilor de pe
nivelul fundamental energetic al atomului pe nivele superioare, excitate, pe când spectrul
de emisie cuprinde şi linii care corespund unor tranziţii între diverse nivele excitate.
Gazele moleculare rarefiate dau spectre de absorbţie de benzi, fiecare bandă fiind
alcătuită dintr-o grupare de linii de absorbţie apropiate în spectru.
În spectrele de absorbţie ale gazelor la presiune mai mare şi, în special, în cele ale
lichidelor şi solidelor apar benzi complicate care nu pot fi uşor descompuse în linii.
Practic toate materialele transparente prezintă o absorbţie selectivă în anumite
regiuni spectrale.
În domeniul vizibil se poate realiza o absorbţie neselectivă, deci în aceeaşi
proporţie pentru toate lungimile de undă, cu ajutorul unei suspensii de particule de negru
de fum sau cu ajutorul unei plăci de sticlă acoperită cu un strat subţire semitransparent de
platină. O astfel de placă constituie un filtru negru.
6.5.2. Dispersia luminii
Dispersia luminii, fenomen natural observat în curcubeu, a fost pus în evidenţă
experimental şi studiat ştiinţific de către Newton cu ajutorul unei prisme. Experienţa facută
de către Newton constă în trimiterea printr-o prismă a unei raze de lumină albă. Această
rază trecând prin prismă se descompune, asfel încât pe un ecran aşezat în faţa fasciculului
de lumină care iese din prismă în loc de o pată luminoasă albă se vede o pată colorată,
numită de către Newton spectru. Culorile se succed în mod continuu, de la roşu până la
violet. Dacă se trece printr-o altă prismă fiecare culoare din spectru, se constată că aceasta
nu se mai descompune, deci spectrul care iese din prima prismă este compus din radiaţii

263
simple monocromatice (cu o singură lungime de undă λ ). Prin amestecarea tuturor
culorilor din spectru se reface lumina albă iniţială.
Descompunera luminii albe prin prismă arată că indicele de refracţie n al mediului din care
este confecţionată prisma nu este acelaşi pentru toate radiaţiile cu lungimi de undă diferite.
Prin dispersia luminii se înţelege fenomenul care rezultă din variaţia indicelui de refracţie
n al unui mediu în funcţie de lungimea de undă a lumini care trece prin el: )(λfn = .
Disperisia luminii este de două tipuri: dispersie normală şi dispersie anormală.
Dispersia normală este cazul de dispersie în care indicele de refracţie n creşte monoton o
dată cu descreşterea lungimii de undă a luminii (de la roşu la violet).
O relaţie dedusă de Cauchy, şi care corespunde satisfăcător datelor experimentale de
dispersie normală pe domenii nu prea întinse, în care materialul este transparent, este:
.....42+++=
λλ
CBAn
în care λ reprezintă lungimea de undă, iar constantele de material A > B > C..... pot fi
determinate experimental prin măsurători ale indicelui de refracţie pentru diferite radiaţii
monocromatice.
Prin prismele umplute cu iod se constată că radiaţiile dinspre albastru sunt deviate
mai puţin decât cele dinspre roşu (invers decât la dispersia normală), iar alte radiaţii sunt
absorbite, ceea ce a dus la denumirea de dispersie anormală. S-a constatat că toate
corpurile care absorb lumina foarte puternic într-un anumit domeniu (sau domenii) de
lungimi de undă, prezintă în acel loc (acele locuri) dispersia anormală.
Spectrele tuturor substanţelor prezintă benzi de absorbţie. Dacă stratul de substanţă
este incolor, deci nu absoarbe în vizibil, el poate absorbi în ultraviolet sau infraroşu şi în
vecinătatea acestei benzi de absorbţie variaţia cu lungimea de undă a indicelui de refracţie
prezintă mersul neobişnuit ce caracterizează dispersia anormală. Deşi o astfel de dispersie

264
este întâlnită la orice substanţă, în vecinătatea benzilor de absorbţie s-au menţinut
denumirile de dispersie normală pentru dispersia dintr-o regiune spectrală depărtată de
banda de absorbţie şi de dispersie anormală pentru dispersia din vecinătatea benzii de
absorbţie.
În figura 6.23 este prezentată schematic dependenţa de lungimea de undă a
indicelui de refracţie al unei substanţe care prezintă o bandă de absorbţie în infraroşu.
Să presupunem că liniile punctate orizontale limitează banda de absorbţie.
Deplasându-ne de la dreapta la stânga, deci spre lungimi de undă descrescătoare, indicile
de refracţie creşte, conform dispersiei normale, creşterea devenind pronunţată în
apropierea benzii de absorbţie. Chiar în dreptul acesteia, substanţa nu mai este transparentă
şi, în general, nu se mai poate determina valoarea indicelui de refracţie. De cealaltă parte a
benzii de absorbţie (spre lungimi de undă mai mici) valoarea indicelui de refracţie este mai
mică decât era la lungimi de undă mai mari decât a benzii de absorbţie. Este tocmai zona
dispersie anormale. Continuând deplasarea spre lungimi de undă mai mici se găseşte un
mers normal al dispersiei cu o creştere rapidă a lui n cu descreşterea lui λ . Creşterea din
nou rapidă a lui n din stânga figurii indică apropierea de o nouă bandă de absorbţie situată
în vizibil. Se poate concluziona că în apropierea unei benzi de absorbţie materialele devin
mai dispersive, are loc o variaţie mai rapidă a indicelui de refracţie pentru variaţii mici ale
lungimii de undă.
λ
n
fig. 6.23
265
Capitolul 7: Laseri
7.1. Absorbţia, emisia spontană şi emisia stimulată
Efectul de amplificare a radiaţiei (efectul maser sau laser), care stă la baza
funcţionării generatoarelor şi amplificatoarelor cuantice de radiaţii, se bazează pe
fenomenul de emisie stimulată sau indusă, care este inversul fenomenului de absorbţie a
radiaţiei. Când un foton este absorbit, energia lui este transferată în energie internă a
sistemului atomic (atom, moleculă, etc.) şi acesta din urmă trece într-o stare energetică
excitată. Sistemul atomic respectiv poate fi excitat, de exemplu, prin trecerea sa de pe
starea fundamentală n, cu valoarea energetică cea mai mică, pe o anumită stare energetică
cuantificată superioară m, de unde poate reveni la starea iniţială (fundamentală) prin
eliberarea energiei câştigate sub formă de radiaţie cu frecvenţa mnν dată de condiţia lui
Bohr:
nmmn EEh −=ν (7.1)
În această relaţie, mE şi nE sunt energiile stărilor excitată şi fundamentală ale sistemului
atomic, iar h este constanta lui Planck.
Emisia de radiaţie cu frecvenţa dată de relaţia de mai sus poate avea în două
moduri:
- trecerea de la starea excitată pe cea fundamentală se face fără intervenţie din afară, în
acest caz avem emisie spontană.
- dacă asupra sistemului atomic aflat în stare excitată acţionează câmpul unei unde
electromagnetice având frecvenţa mnν , egală cu cea corespunzătoare tranziţiei considerate,
sistemul atomic va emite o undă care se găseşte într-o relaţie bine determinată cu unda
incidentă. Acest process se numeşte emisie stimulată sau emisie indusă. La rândul său
unda emisă în acest mod este capabilă să stimuleze un alt sistem mecanic, ş.a.m.d..

266
Procesul conduce la amplificarea undei incidente, idee care stă la baza principiului de
funcţionare a generatoarelor cuantice de radiaţie.
Noţiunea de emisie stimulată a fost introdusă de Einstein, pornind de la un
ansamblu de sisteme atomice aflat la temperatura T în echilibru termodinamic cu pereţii
incintei în care se află. Datorită acestui echilibru, Einstein postulează că radiaţia emisă şi
absorbită de către sisteme prin tranziţii între nivelele energetice trebuie sa se supună legii
radiţiei corpului negru.
Fie m si n două nivele energetice ale sistemului atomic. Nivelului superior m îi
corespunde energia Em, iar celui inferior n, energia En. Tranziţiile posibile între cele două
nivele sunt corespunzătoare absorbţiei sau emisiei de radiaţie cu frecvenţa bine
determinată, dată de relaţia (7.1).
Să determinăm probabilităţile tranziţiilor de absorbţie şi emisie, cât şi numărul de
tranziţii efectuate în fiecare caz în unitatea de timp. Să considerăm un sistem atomic aflat
în starea energetică inferioară n, în prezenţa radiaţiei electromagnetice având densitatea de
energie, în unitatea de interval de frecvenţă, la frecvenţa de tranziţie ν , egală cu νρ . Acest
sistem este capabil să absoarbă o anumită cantitate din energia radiaţiei prezente, trecând
în starea excitată m. Probabilitatea aceste tranziţii într-un interval de timp dt depinde de
densitatea de energie νρ după relaţia:
E
fig. 7.1
m n

267
dtBdP nm
abs
nm νρ=
unde nmB este o constantă numită coeficient Einstein de absorbţie, şi ea dă probabilitatea
de absorbţie în unitatea de timp pentru unitatea de densitate de energie. Numărul de
tranziţii de absorbţie )( mn→ în unitatea de timp pentru ansamblul de sisteme atomice va
fi proporţional cu numărul Nn de sisteme atomic din unitatea de volum aflate în starea n şi
cu probabilitatea de absorbţie, adică:
νρnmn
abs
n BNdt
dN=−
)( (7.2)
în care abs
ndN )( va reprezenta numărul cu care se măreşte populaţia nivelului m.
Dacă în prezenţa radiaţiei de densitate νρ , sistemul se găseşte în starea superioară
m, el va reveni sub influenţa acestei radiaţii pe starea n, emiţând energia câştigată prin
excitaţie sub formă de radiaţie cu frecvenţa ν (relaţia 7.1) şi în fază cu unda care a
provocat tranziţia. Dat fiind că această tranzaţie se face sub influenţa radiaţiei prezente,
fenomenul a fost numit emisie stimulată sau emisie indusă. În fenomenul de emisie
stimulată se obţine o undă amplificată, monocromatică şi coerentă.
Probabilitatea unei astfel de tranziţii va depinde deci de densitatea νρ a radiaţiei şi,
ca urmare, pentru intervalul de timp dt vom avea:
dtBdP mn
indus
mn νρ=
unde mnB este o constantă, numită coeficient de emisie indusă şi reperezintă probabilitatea
de emisie indusă în unitatea de timp pentru densitatea de energie unitară. Numărul
tranziţiilor induse nm→ în unitatea de timp, pentru unitatea de volum, va fi:
νρmnm
indus
m BNdt
dN=−
)( (7.3)
268
mN reprezentând numărul de sisteme atomice din unitatea de volum, aflate în starea m, iar
- indus
mdN )( este numărul de sisteme atomice cu care se micşorează mN prin emisie indusă.
Dacă, în absorţia radiaţiei, sistemul atomic considerat se găseşte pe starea
energetică superioară m, atunci probabilitatea de trecere a acestui sistem de la starea m la
starea inferioară n, în intervalul de timp dt va fi:
dtAdP mn
spon
mn =tan
unde mnA este o constantă, numită coeficient de emisie spontană, care dă posibiliatea
fenomenului de emisie spontană în unitatea de timp. Observăm că tanspon
mndP nu depinde de
densitatea νρ . În acest caz, sistemele atomice emit întâmplător, la diferite momente de
timp, radiaţia emisă spontan fiind incoerentă şi distribuită într-un interval de frecvenţe
(nemonocromatică).
Numărul tranziţiilor spontane nm→ va depinde numai de probabilitatea de
tranziţie în unitatea de timp mnA şi de numărul Nm de sisteme atomice aflate pe starea m.
Deci: mnm
spon
m ANdt
dN=−
tan)( (7.4)
Deoarece ansamblul sistemelor atomice a fost presupus în echilibru termodinamic,
numărul sistemelor care emit trebuie să fie egal cu cel al celor care absorb energie, deci,
ţinând sema de relaţiile (7.2), (7.3) şi (7.4) obţinem:
)( mnmnmnmn ABNBN += νν ρρ (7.5)
Pe de altă parte, la echilibru termodinamic, repartiţia pe nivelele de energie este
dată de legea lui Boltzman, deci:
kT
h
n
m
n
m eg
g
N
Nν
−
= (7.6)

269
În legea Boltzman mg şi ng sunt ponderile statistice ale nivelelor de energie considerate.
Menţionăm că în cazul în care mg = ng = 1 (nivele nedegenearte), aveam:
BBB mnnm ==
şi relaţia (7.6) devine:
kT
nE
mE
nkT
h
nm eNeNN
−−−
==
ν
(7.7)
Nivelele energetice m şi n, considerate anterior, au fost asfel alese încât frecvenţa
prin tranziţii între ele să coincidă cu cea a câmpului electromagnetic cu care sistemele
atomice se află în echilibru. Menţionăm că nu toate tranziţiile (între diferite nivele) sunt
însoţite de radiaţie, ci există şi procese neradiative (de relaxare).
7.2. Amplificarea radiaţiei
În procesul de amplificare a radiaţiei rolul esenţial îl au fenomenele de absorbţie şi
de emisie stimulată. Emisia spontană generează zgomot şi nu va fi luată în considerare.
Să considerăm din nou numărul de sisteme atomice în echilibru termodinamic cu
radiaţia electromagnetică de densitate de energie νρ . Conform relaţiei (7.2) numărul de
fotoni absorbiţi în unitatea de volum, în timpul dt, va fi:
dtBNdN n
abs
n νρ=− )(
şi energia absorbită va fi:
dthBNdW na νρν=
Neglijând emisia spontană, numărul fotonilor emişi (relaţia 7.3) în unitatea de
volum, în acelaşi timp dt va fi:
dtBNdN m
indus
m νρ=− )(
şi energia emisă va fi:
270
dthBNdW mi νρν=
Pentru a obţine amplificarea trebuie ca energia emisă să fie mai mare decât energia
absorbită, adică:
ai dWdWW −=∆ > 0 sau dthBNNW nm νρν)( −=∆ > 0
Satisfacerea acestei condiţii impune nm NN − > 0, adică în intervalul de timp dt trebuie să
existe un surplus de sisteme atomice pe starea excitată m.
Dacă această condiţie este îndeplinită, un foton cu frecvenţa ν , care întâlneşte un sistem
atomic în starea m va induce emisia de către acesta a unui nou foton cu aceeaşi frecvenţă şi
fază ca ale celui incident. Cei doi fotoni existenţi, repetând procesul, vor induce emiterea
altor doi fotoni, ş.a.m.d. Pe măsura propagării în mediu, unda este amplificată. Dacă
fotonul incident întâlneşte sisteme atomice în starea inferioară, el va fi absorbit, conducând
la excitarea sistemului. Dacă condiţia mN > nN nu este îndeplinită, amplificarea nu are loc.
7.3. Inversia de populaţie
În mod natural condiţia mN > nN nu este îndeplinită. Aşa cum am mai precizat, la
echilibru termodinamic raportul numărului de sisteme atomice în cele două stări este dat de
distribuţia Boltzman, care arată că la orice valoare a lui T numărul de sisteme aflate pe un
nivel scade cu creşterea energiei nivelului. Deci pe nivelele superioare se află mai puţine
sisteme atomice decât pe cele joase. Deşi probabilităţile de absorbţie şi emisie indusă sunt
egale, numărul fotonilor absorbiţi depăşeşte numărul celor emişi, deoarece majoritatea
sistemelor atomice se află pe stările joase de energie şi, ca urmare, condiţia de amplificare
nu este satisfăcută în mod natural.
Pentru a realiza condiţia mN > nN vor trebui create condiţii speciale de mărire a
numărului de sisteme atomice de pe nivelul superior, adică să se producă inversia de

271
populaţie. În acest caz, ansamblul de sisteme atomice nu mai este în echilibru
termodinamic, ci în raport cu nivelele m şi n considerate, el are temperatură negativă.
Ţinându-se cont de relaţia (7.7) putem deduce uşor:
n
m
nm
N
Nk
EET
ln
−−= (7.8)
La echilibru termodinamic mN < nN şi mE > nE , deci T> 0.
Dacă printr-o anumită metodă se reuşeşte mN > nN , deşi sistemul de sisteme
atomice nu se mai află în echilibru, pentru un interval de timp se stabileşte un echilibru
forţat. E ca şi cum, conform relaţiei (7.8), acest lucru ar corespunde la T< 0.
Ansamblul de sisteme atomice pentru care s-a realizat inversia de populaţie şi care
posedă temperatură negativă în raport cu aceste nivele, este capabil de amplificare (acţiune
laser) a radiaţiei de frecvenţă ν corespunzătoare tranziţiei între nivelele considerate. Acest
ansamblu de sisteme atomice se numeşte mediu activ.
Pentru realizarea unui surplus de populaţie pe nivelul superior al tranziţiei laser
sunt necesare mai multe condiţii. Dintre acestea cea mai importantă este necesitatea unui
timp de viaţă mediu lung al nivelului superior al tranziţiei laser - nivelul trebuie să fie
metastabil. În aceste condiţii se pot acumula, pe acest nivel, un număr cât mai mare de
sisteme atomice, încât acesta să depăşească mult numărul de sisteme atomice de pe nivelul
inferior, dacă acesta este tot un nivel excitat, sau de pe nivelul fundamental, dacă acesta
este nivelul inferior al tranziţiei laser. Acest proces de transfer al sistemelor atomice din
starea fundamentală în starea excitată superioară a tranziţiei laser, a căpătat numele de
pompaj. Realizarea pompajului depinde, printre altele, de natura substanţei utilizate ca
mediu, astfel:

272
- dacă mediul activ este solid, mijlocul cel mai eficace de pompaj este iradiera acestuia cu
lumină intensă având frecvenţa adecvată (pompaj optic).
- dacă mediul activ este un gaz (sau amestecuri de gaze), pompajul cu randamentul cel mai
bun se realizează cu ajutorul unei descărcări electrice în gazul respectiv sau prin ciocniri
neelastice între atomii gazului şi electronii proveniţi de la un tun electronic special.
Funcţionarea unui laser este legată şi de prezenţa unei cavităţi de rezonanţă, care
conţine mediul activ. O astfel de cavitate (de obicei de tip etalon Fabry-Perot) este
construită în aşa fel încât drumul optic dus-întors al radiaţiei prin cavitate sa fie un
multiplu întreg al lungimii de undă λ . Alegând potrivit distanţa dintre plăcile etalonului
(deci lungimea cavităţii) se pot selecta, de la o sursă bogată în radiaţii, una sau mai multe
lungimi de undă pentru care este îndeplinită această condiţie.
Excitarea mediului activ, care umple cavitatea, într-un mod oarecare (iradiera cu
lumină, descărcare în gaz sau ciocniri cu electroni) cu lungimea de undă selectată, conduce
la apariţia în cavitate a unei unde staţionare, îndeplinindu-se condiţia de autooscilaţie.
Pentru apariţia fenomenului laser, realizarea inversiei de populaţie este numai condiţie
necesară, dar nu şi suficientă. Ea trebuie completată cu condiţia de autooscilaţie, care
constă în necesitatea ca puterea radiaţiei obţinute prin amplificare să depăşească puterea
pierdută în cavitate. Pentru a realiza aceasta, trebuie depăşită o putere de prag a radiaţiei
excitatoare, începând de la care efectul laser are loc.
7.4. Proprietăţile radiaţiei laser
Coerenţa. Radiaţia spontană este emisă de sistemele atomice în mod întâmplător, la
momente diferite; ca urmare, această radiaţie este necoerentă, faza ei variind întâmplator.
În schimb, radiaţia stimulată este emisă de sistemele atomice în fază cu radiaţia
stimulatoare şi, prin urmare, este coerentă. După cum am arătat, efectul laser este declanşat

273
de primii fotoni emişi în mod spontan. Să presupunem că a fost emis spontan un singur
foton, care, prin stimulare, va obliga unul din sistemele atomice acumulate pe nivelul
superior al tranziţiei laser să emită un foton. Acesta este coerent cu cel care l-a produs, la
rezonanţă (care este cea mai probabilă), fiind în fază cu el, iar în afara rezonanţei, în avans
sau în întârziere de fază cu o cantitate finită. Deci faza radiaţiei stimulate nu variază deloc,
ci este comandată de unda stimulatoare. Fotonul indus va stimula, la rândul său, un alt
sistem atomic, ş.a.m.d. Ca urmare, radiaţia indusă va fi în totalitate o radiaţie coerentă.
Direcţionalitatea. Datorită dimensiunilor lor finite, sursele obişnuite de lumină emit
fascicule de divergenţă mare. În cazul laserului, ţinând seama de amplificare, semnalul
emis este extrem de direcţional. În acest caz, datorită formei speciale a cavităţii rezonante
(de tip etalon Fabry-Perot) undele se reflectă de un număr mare de ori pe oglinzile de la
capete, fiind amplificate numai acele unde care se propagă de-a lungul axei cavităţii.
Undele care formează un unghi cu acestă direcţie se reflectă de un număr mic de ori şi apoi
părăsesc cavitatea prin pereţii laterali fără să participle la amplificare. Unghiul de
divergenţă este cuprins între 0,10 şi 10 pentru laserii cu mediu activ solid şi sub un minut
de grad pentru cei cu mediu activ gazos.
Monocromaticitatea. Una dintre cele mai importante proprietăţi ale radiaţiei laser este
monocromaticitatea extrem de pronunţată a acesteia. Această proprietate depinde de
calităţile cavităţii rezonante şi de procesul de emisie stimulată care are loc în interiorul său.
Monocromaticitatea la un laser cu gaz este de ordinal 10-2 Hz.
Intensitatea. Cea mai imprtantă limitare a surselor de lumină obişnuite pare a fi luminanţa
lor foarte mică pentru diferite aplicaţii. Emisia stimulată, care stă la baza efectului laser,
forţează sistemele atomice excitate să emită mai rapid decât ar face-o în mod normal, fapt
care, corelat cu direcţionalitatea foarte bună, conduce la luminanţe foarte mari ale surselor
laser. Ca exemplu, laserul cu rubin conduce la luminanţe de 5.109 ori mai mari decât o arie

274
echivalentă a suprafeţei solare. Această valoare este şi mai mare la laserii cu gaz deoarece
au o direcţionalitate mai mare.
7.5. Tipuri de laseri
Realizarea primilor laseri (Light Amplification by Stimulated Emission of
Radiation) se datorează în primul rând fizicienilor C.H Townes, N. G. Basov şi A. M.
Prokhorov, cărora li s-a decernat în 1964 premiul Nobel.
Realizarea practică a unui laser presupune existenţa unei cavităţi rezonante şi a
unui sistem de pompaj pentru realizarea inversiei de populaţie. De exemplu, la laserul cu
rubin (mediu solid) cavitatea rezonantă este constituită din însuşi mediul activ(rubinul), iar
sistemul de excitare este în mod obligatoriu optic şi se realizează cu un tub de descărcare
în Xe sau amestec de neon-kripton, construit în formă de spirală în jurul barei de rubin. În
cazul laserilor cu gaz inversia de populaţie se realizează în principal cu ajutorul excitării
mediului gazos prin ciocniri electronice, produse de descărcarea electrică în gaz (dar s-au
realizat şi laseri care folosec ambele metode de excitare, atât optică, cât şi prin descărcare
electrică), iar cavitatea rezonantă este formată de însuşi tubul de descărcare umplut cu
mediul activ, care se termină cu două oglinzi plane şi paralele, aşezate perpendicular pe
axul tubului şi având un coeficient de reflexie mare.
Vom enumera în continuare cele mai importante tipuri de laseri construiţi:
Laserul cu He-Ne, realizat pentru prima dată în 1959, conţine ca mediu activ un amestec
gazos de He-Ne în raportul 10:1, cu presiunea totală de 1,1 Torr. Acest amestec gazos se
află într-un tub de descărcare, care constituie împreună cu oglinzile reflectatoare, cavitatea
rezonantă. Prin fenomenele de descărcare electrică în gaze, la ciocnirile electronilor cu
atomii, şi a atomilor exitaţi cu cei neexcitaţi, apar stări metastabile ale neonului care

275
servesc la obţinerea radiaţiei stimulate respective. La aceste tipuri de laseri se obţin radiaţii
în infraroşu cu lungimile de undă de 1152.6 nm, 1161,7 nm, 1207 nm şi în vizibil cu
lungimea de undă de 632,8 nm. Laserul cu He-Ne emite în mod continuu cu o putere de 10
– 15 mW.
Laserul cu He-Ne a fost realizat pentru prima data în România, la Bucuresti în anul 1961,
de colectivul de cercetători condus de prof. I. Agârbiceanu.
Laserul cu Rubin are ca mediu activ un cristal de rubin (Al2O3+0,05 0/00 Cr) şi a fost
realizat în 1960 de către T. H. Maiman. Cristalul de rubin este tăiat sub formă de bară
cilindrică astfel încât axa optică a cristalului să coincidă cu axa cilindrului. Prin iradierea
cristalului de rubin cu radiaţia de 560 nm, care se face cu un tub de descărcare în Xe sau
amestec de neon-kripton, construit în formă de spirală în jurul barei de rubin, se realizează
pompajul optic. Pentru a concentra toată lumina emisă de lampă pe cristal, pereţii incintei
în care se află dispozitivul sunt acoperiţi cu un strat difuzant de oxid de magneziu. Laserul
astfel construit emite lumina stimultă cu lungimile de undă de 694,3 nm şi 692,9 nm.
Laserul cu rubin funcţionează în pulsuri (durata unui puls este de aproximativ 10-8 s), iar în
timpul pulsului el furnizează o putere de ordinal zecilor de MV.
Alte tipuri de laseri utilizează diferite alte medii active solide, lichide şi gazoase:
- laserul cu neodim trivalent Nd+++ înglobat în sticlă de bariu-crom
- laserul cu coloranţi organici în soluţie, de exemplu rodamina dizolvată în alcool, care a
permis realizarea laserului “acordabil” cu emisie laser în domeniul de lungimi de undă
500 – 600 nm; iar cu alţi coloranţi, între 330 – 1176 nm.
- laserul cu semiconductori, unde se utilizează nivelele energetice caracteristice acestor
substanţe (joncţiuni p-n)
- laserul cu dioxid de carbon, care este un laser de putere mare
- laserul cu vapori de cesiu

276
- laserul cu azot ( cu radiaţii laser în ultraviolet)
- laserul (continuu) cu neodim în Ytrium-Aluminium-Granat (YAG: Nd+++)
- laseri cu lichide, de exemplu laserul cu chelaţi, cu mediu activ europiu-chelat (chelatul
fiind un radical organic - acetonatul de benzen dizolvat în alcool etilic)
- laserul cu argon ionic
Un alt tip interesant de laser este laserul cu electroni liberi realizat in 1977, în care
electronii liberi (relativişti) traversează un câmp magnetic periodic sau câmpul unor unde
electromagnetice staţionare şi emit radiaţii electromagnetice (emisie spontană) care în
interiorul unor cavităţi rezonante devin radiaţie de emisie stimulată.
Aplicaţiile laserilor sunt foarte numeroase. Se găsesc aplicaţii în: verificarea
experimentală a teoriei relativităţii, cercetarea câmpului gravitaţional, radioastronomie, în
măsurători optice, în medicină (operaţii pe retină, tehnică dentară, endoscopie), în biologie,
la tăierea şi prelucrarea materialelor, în spectroscopia atomică şi moleculară, în separarea
izotopilor, în meteorologie, în geofizică, în aplicaţiile militare, în fuziunea nucleară , etc.
De asemenea, realizarea laserilor a condus la crearea şi dezvoltarea unor discipline noi, de
mare importanţă pentru ştiintă şi tehnică, cum ar fi optica neliniară, holografia, etc.
277
Capitolul 8: Radiaţia termică
S-a constatat pe cale experimentală că toate corpurile din natură sunt surse de
radiaţii electromagnetice, ale căror caracteristici depind de natura corpurilor, cât şi de
temperatura la care acestea se află. Din acest motiv, acest tip de radiaţie a primit
denumirea de radiaţie termică. Această radiaţie este determinată de mişcarea de agitaţie
termică a atomilor şi moleculelor, care au ca rezultat excitarea energetică a acestora prin
ciocniri, urmată de dezexcitarea prin emise de radiaţie electromagnetică. Ansamblul
acestor radiaţii electromagnetice de dezexcitare formează tocmai radiaţia termică.
Dacă se plasează un corp încălzit într-o incintă vidată cu pereţii perfect reflectatori
şi izolată adiabatic de exterior, se stabileşte în timp o stare de echilibru între radiaţia
termică emisă de corp şi radiaţia pe care acesta o absoarbe din incintă. Corpul primeşte în
unitatea de timp de la radiaţia absorbită aceiaşi cantitate de energie pe care el însuşi o
emite sub formă de radiaţie termică. Distribuţia de energie între corp şi radiaţie nu variază
în timp, obţinându-se astfel radiaţia termică de echilibru. Proprietăţile radiaţiei termice de
echilibru sunt următoarele:
- spectrul său este continuu
- este izotropă şi omogentă
- este nepolarizată
Radiaţia termică are proprietăţile comune tuturor undelor: se reflectă, se refractă,
este absorbită.
Pentru fiecare dintre aceste trei fenomene se defineşte coeficientul corespunzător:
- coeficientul de reflexie ρ , definit ca raportul dintre fluxul de radiaţie reflectat (fluxul
reprezentând energia din unitatea de timp a radiaţiei termice) şi cel incident:
i
r
Φ
Φ=ρ

278
- coeficientul de transmisie τ , definit ca raportul dintre fluxul de radiaţie transmis şi cel
incident: i
t
Φ
Φ=τ
- coeficientul de absorbţie α , definit ca raportul dintre fluxul de radiaţie absorbit şi cel
incident:
i
r
Φ
Φ=α
Conform legii consevării energiei se obţine:
1=++ ατρ
Aceşti trei coeficienţi depind de lungimea de undă a radiaţie incidente, precum şi de natura
sau temperatura corpului.
Un corp al cărui coeficient de absorbţie este unitar )1( =α indiferent de lungimea
de undă a radiaţiei incidente şi temperatură se numeşte corp negru. În natură nu se pot
întâlni corpuri negre absolute, însă există şi unele corpuri cu o comportare apropiată de cea
a corpului negru (de ex. negrul de fum sau negrul de platină).
Suprafaţa unui corp care emite şi absoarbe radiaţii se caracterizează prin:
- emitanţa energetică(exitanţă energetică) M, definită ca energia emisă în unitatea de
timp, în toate direcţiile, de unitatea de suprafaţă emisivă:
dt
dW
SM
1= (W/m2)
Emitanţei energetice, definită global pentru pentru toate lungimile de undă îi
corespunde mărimea emitanţa energetică spectrală, definită ca fiind emitanţa energetică
din vecinătatea unei lungimi de undă considerate:
λλ
d
dMm =
Pentru toate lungimile de undă emitanţa energetică totală este dată de relaţia:

279
λλdmM ∫∞
=0
Aşa cum am precizat anterior, în natură nu exista corpuri negre absolut, dar se pot
construi dispozitive care să aproximeze destul de bine un asfel de corp. Experimental, se
poate realiza un corp negru cu ajutorul unei incinte opace cu pereţii interiori foarte
absorbanţi (de ex. o incintă de cupru cu oxid de cupru negru) având un orificiu foarte mic.
O radiaţie termică care pătrunde în incinta va suferi reflexii succesive însoţite de absorbţii
parţiale pe pereţii interiori ai incintei, astfel încât radiaţia este practic complet absorbită.
Suprafaţa orificiului se comportă ca un corp negru. De asemenea, această incintă se poate
introduce într-un cuptor, deci se poate încalzi incinta la o temperatură oarecare T şi atunci
orificiul va emite o radiaţie termică care are proprietaţile corpului negru aflat la aceeaşi
temperatură. Se poate astfel cerceta repartiţia spectrală a energiei radiaţiei termice emise
de către corpul negru la diferite temperaturi. Studiul experimental al radiaţiei corpului
negru a condus la formularea unor legi specifice ale radiaţiei termice.
8.1. Legile experimentale ale radiaţiei termice a corpului negru
1. Legea lui Kirchhoff: “emitanţa energetică spectrală a unui corp negru depinde doar de
temperatura sa absolută şi de lungimea de undă a radiaţiei emise, fără a depinde de natura,
forma şi dimensiunile corpului”,
),( Tmm λλλ =
Integrând emitanţa energetică spectrală în raport cu lungimea de undă se obţine:
∫∞
==0
)(),( TMdTmM λλλ
Legea Kirchhoff se mai poate enunţa astfel: “emitanţa energetică a corpului negru este o
funcţie universală de temperatura sa absolută”.

280
2. Legea Stefan-Boltzmann. Emitanţa energetică a corpului negru M, cuprinzând toate
frecvenţele, toate direcţiile de propagare şi toate stările de polarizare depinde de
temperatura absolută T prin legea stabilită experimental de Stefan şi justificată teoretic de
Boltzman:
4TM ⋅=σ
lege cunoscută sub numele de legea Stefan-Boltzmann, iar σ este o constantă universală a
cărei valoare este 5,6697.10-8 Wm-2K-4.
3. Legea de deplasare Wien. Distribuţia spectrală a energiei emise sub formă de radiaţie
termică nu depinde de materialul, forma şi dimensiunile corpului negru, ci numai de
temperatura acestuia. Curba distribuţiei emitanţei energetice spectrale λm la diferite
temperaturi este reprezentată în figura 8.1.
Se observă că pe măsura creşterii temperaturii, maximul curbelor se deplasează
spre lungimi de undă mai mici. Această modificare a distribuţiei spectrale a energiei
determinată de creşterea temperaturii este descrisă de legea de deplasare Wien:
bT =⋅maxλ
unde maxλ este lungimea de undă corespunzătoare maximului de distribuţie a emitanţei
energetice spectrale la temperatura T, iar b este o constantă universală cu valoarea
2,8978 .10-3 m.K. În aceste condiţii, la temperaturile atinse în mod curent, maximul emisiei
λ
λm
T2>T1
T1
fig. 8.1

281
se găseşte în infraroşu. La 5000 K acest maxim intră în regiunea galbenului din vizibil, iar
la peste 7200 K, maximul intră în ultraviolet.
Legile radiaţiei termice au o deosebită importanţă practică, în special la
determinarea temperaturilor mari ale corpurilor prin metoda pirometriei optice.
În cadrul fizicii clasice, s-a încercat fără succes explicarea legilor experimentale ale
radiaţiei termice a corpului negru. Astfel, bazându-se pe termodinamica clasică şi pe legea
echipartiţiei energiei, Rayleigh şi Jeans au obţinut o formulă teoretică pentru emitanţa
energetică spectrală a corpului negru:
kTc
m4
2
λπ
λ = (8.1)
în care k este constanta Boltzmann şi c este viteza luminii în vid.
Această formulă a fost confirmată experimental numai la lungimi de undă mari, fiind în
contradicţie cu experienţa spre lungi de undă mici. Această divergenţă dintre formula
Rayleigh-Jeans şi experienţă a fost denumită “catastrofa ultravioletă”. În schimb, la
lungimi mici de undă, Wien a găsit valabilă o altă formulă pentru emitanţa spectrală a
corpului negru:
T
C
ec
m λλ λ
2
51
−= (8.2)
unde c1 şi c2 sunt constante universale.
Atât formula 8.1 cât şi formula 8.2, conduc la valori infinite pentru emitanţa
energetică integrală M.
În anul 1900 Planck stabileşte o formulă generală, în deplină concordanţă cu datele
experimentale:
1
125
2
−
⋅=kT
hc
e
hcm
λ
λ λπ
(8.3)

282
unde h este constanta lui Planck. În figura 8.2 sunt reprezentate grafic formulele 8.1 (curba
R-J), 8.2 (curba W) şi 8.3 (curba P).
Se poate vedea imediat că formulele Rayleigh-Jeans şi Wien constituie cazuri
particulare ale formulei Planck. Într-adevăr, pentru Tλ >> 1 (unde cu lungimi de undă
lungi sau temperaturi ridicate): kT
hc
eλ = .......1 ++kT
hc
λ, formula Planck devine
kTc
m4
2
λπ
λ = , adică formula Rayleigh-Jeans. Pentru Tλ << 1 (unde cu lungimi de undă
scurte sau temperaturi foarte joase) formula lui Planck devine: kT
hc
ehc
m λλ λ
π −⋅=
5
22, adică
formula stabilită de Wien.
Pentru a explica mecanismul radiaţiei termice şi a demonstra formula care-i poartă
numele, Planck a considerat că atomii şi moleculele care întră în constituţia corpului negru,
se comportă ca nişte oscilatori electromagnetici foarte mici care emit şi absorb energie. În
legătură cu aceşti oscilatori atomici, Planck a făcut următoarele ipoteze, în contradicţie cu
concepţiile fizicii clasice:
- un oscilator nu poate avea orice energie E, ci doar numai un multiplu întreg al unei
cantităţi distincte νh :
E = νhn ⋅
λ
λm
fig. 8.2
P W R-J

283
- oscilatorul nu emite radiaţiile în mod continuu, ci numai în “salturi”, sau cuante, sau
fotoni. Aceste cuante de energie se emit atunci când oscilatorul trece de la o stare
cuantificată de energie la alta. Atâta timp cât oscilatorul rămâne în una din stările sale
(stări staţionare) el nu emite şi nu absoarbe energie.
Constanta lui Plank, este o constantă universală cu un rol deosebit de important în
fizica modernă. Legile radiaţiei corpului negru dau pentru această constantă valoarea
6, 62 .10-34 Js.
Demonstraţiei făcute de Planck pentru a deduce formula care-i poartă astăzi numele
i se poate reproşa caracterul ei inconsecvent. Astfel ipoteza structurii fotonice a radiaţiei
termice (pe baza căreia se calculează energia medie a unui mod de vibraţie) este utilizată în
acelaşi timp cu ipoteza ondulatorie (pe baza căreia calculează numărul modurilor de
vibraţie). Deci, Planck cuantificând energia oscilatorilor atomici, trata radiaţia
electromagnetică exclusiv ca o undă. Einstein, studiind legile efectului fotoelectric, a arătat
pentru prima dată însuficienţa în anumite condiţii a acestei descrieri ondulatorii a radiaţiei,
elaborănd teoria fotonică a luminii, teorie prezentată deja într-un capitol anterior.
284
Capitolul 9: Radiaţia X
Razele X sunt radiaţii electromagnetice similare celor luminoase, însă au frecvenţe
mult mai mari. Domeniul de lungimi de undă corespunzătoare radiaţiilor X se întinde între
0,1 Å şi 500 Å. Structura discontinuă a radiaţilor electromagnetice rezultă în mod evident
din experienţele cu raze X.
În anul 1895, W.K. Röngen lucrând cu razele catodice (cunoscute astăzi ca fiind
electronii) a descoperit existenţa radiaţiei X, caracterizată prin:
- radiaţia este produsă la impactul razelor catodice (electronilor) cu o suprafaţă solidă
- radiaţia nu este deviată în câmpuri electrice şi magnetice
- trecerea radiaţiei printr-un gaz provoacă ionizarea gazului mărindu-i conductivitatea
electrică
- elementele mai uşoare sunt mai transparente la razele X decât elementele mai grele
- impresionează placa fotografică
- posedă proprietăţile caracteristice radiaţiei luminoase: se reflectă, se refractă, se
polarizează şi produce fenomene de interferenţă şi difracţie.
Descoperirea proprietăţilor optice – polarizare şi difracţie, a clarificat natura
electromagnetică a radiaţiei X.
Razele X se produc în tuburi speciale. Un astfel de tub de raze X, este un tub de
descărcare în care electronii emişi de un catod încălzit sunt acceleraţi către anod de o
diferenţă de potenţial de ordinul 104 – 105 V. De pe suprafaţa anodului ţintă, numit şi
anticatod, se emite radiaţia X. Metoda difracţiei pe reţele cristaline a permis să se
determine experimental lungimea de undă a razelor X şi să se determine spectrul lor.
Într-un tub de raze X iau naştere două tipuri de astfel de raze: radiaţii X cu spectru
continuu (radiaţiile de frânare) şi radiaţii X cu spectru de linii (radiaţie X caracteristică).

285
Radiaţiile X de frânare se produc prin frânarea electronilor puternic acceleraţi pe
anticatod, ea fiind rezultatul efectului fotoelectric invers, în care energia cinetică a
electronilor incidenţi se transformă în fotoni de energie νh . Cu cât electronul trece mai
aproape de un nucleu din anodul ţintă, deci cu cât parametrul de ciocnire este mai mic, cu
atât el este mai puternic frânat şi energia fotonului emis este mai mare. Există fotoni care
sunt frânaţi până la oprire, în acest caz energia fotonului este maximă. Fotonii emişi de un
ansamblu de astfel de electroni frânaţi pot avea orice energie între zero şi energia maximă
egală cu energia electronilor incidenţi, deci spectrul radiaţiei de frânare este un spectru
continuu. Experimental s-a găsit că spectrul continuu este net delimitat spre lungimi mici
de undă, valoarea lungimii de undă minimă minλ fiind independentă de materialul
anodului, dar depinde de tensiunea de acclerare U a electronilor. Conform teroiei
fotonice, energia maximă a unui foton este determinată de tensiunea de accelerare conform
realţiei: eUhc
hE ===
minmaxmax
λν
de unde: eU
hc=minλ (9.1)
Spre exemplu, pentru U = 10 000 V, se obţine minλ = 1,24 Å, valoare care este în
concordanţă cu ce aceea obţinută prin difracţia razelor X pe cristale.
În figura 9.1 se prezintă spectrul radiaţiei X de frânare pentru diferite valori ale
tensiunii de accelerare. Spectrul pentru fiecare tensiune de accelerare începe de la o
lungime de undă minimă corespunzătoare tensiuni de accelerare, conform relaţiei (9.1). Pe
măsură ce creştem tensiunea de accelerare, limita spectrului continuu se deplasează spre
lungimi de undă mai mici.
Cu cât tensiunile de accelerare sunt mai mari, peste spectrul continuu de frânare se
suprapune un spectru de linii.

286
Acest spectru de raze X are doar câteva lungimi de undă, lungimi caracteristice
materialului anodului, şi de aceea aceste raze se numesc radiaţii X caracteristice.
Mecanismul de generare a spectrului caracteristic constă în aceea că, ciocnindu-se
cu atomii anodului, electronii puternic acceleraţi smulg acestora electroni din păturile
profunde, cu număr cunatic principal mic (n = 1 - pătura K, n = 2 - pătura L, n = 3 - pătura
M, etc.). Electronii atomului tind să se rearanjeze pentru a aduce atomul în starea de
energie minimă, deci locurile rămase libere sunt ocupate de electroni din păturile
superioare cu numărul cunantic principal n mai mare, tranziţiile respective fiind însoţite
de emisia de raze X cu lungimi de undă bine deterninate, grupate în serii. Deoarece fiecare
tip de atom are un anumit spectru energetic rezultă că radiaţia X caracteristică depinde în
mod esenţial de structura atomică a materialului anticatodului.
Lungimea de undă a radiaţiei X caracteristice se poate calcula destul de bine cu
ajutorul următoarei relaţii cunoscută şi sub numele de legea lui Moseley:
)11
)((1
22 knZR
nk
−−= σλ
unde R este constanta Rydberg, Z este numărul atomic al elementului emiţător, n şi k sunt
numerele cuantice principale ale nivelelor între care are loc tranziţia, σ este o constantă,
numită constantă de ecranare, care se determină experimental.
0 0,2 0,4 0,6 0,8 1 λ (Å)
Intensitatea relativă
10
8
6
4
2
0 20 KV
30 KV
40 KV
50 KV
fig. 9.1
287
Din legea lui Moseley se vede că lungimile de undă emise depind prin intermediul
lui Z de tipul elementului emiţător. Această dependenţă a dus spectrului de linii al radiaţiei
X denumirea de spectru caracteristic. Legea lui Moseley ne mai arată că între mecanismul
de emisie al spectrului luminos şi cel de emise a radiaţiilor X caracteristice nu este o mare
diferenţă. În schimb, datorită faptului că radiaţiile X caracteristice sunt emise prin
dezexcitare pe nivele interioare, spectrul razelor X se găseşte la lungimi de undă mai mici
(deci frecvenţe şi energii mult mai mari decât pentru lumină) şi are mai puţine linii decât
spectrul luminos, linii a caror frecvenţă variază monoton cu Z.
Din cauza acestei din urmă caracteristici, spectrele de raze X se utilizează pentru
identificarea elementelor. Această metodă de analiză şi identificare prin excitarea radiaţiei
X caracteristice este foarte precisă şi foarte sensibilă. Ea a servit la identificarea unor
elemente grele necunoscute cât şi la descoprerirea elementelor transuraniene (Z > 92).
Fizicianul român Horia Hulubei a adus contribuţii importante în studiul radiaţiilor X
caracteristice emise de elementele grele.
Trebuie de asemenea remarcată deosebita importanţă a utilizării radiaţiei X în
medicină (la obţinerea radiografiilor), în biologie, în studiul reţelelor cristaline ale
corpurilor solide - prin difracţia razelor X pe aceste reţele cristaline, etc.

288
Capitolul 10: Holografia
Holografia este tehnica de obţinere a unei fotografii în relief – holograme, fără a
folosi un obiectiv. Holografia a fost concepută de fizicianul D. Gabor în 1947 însă datorită
lipsei la acea vreme a unui surse de lumină coerentă – cerinţă absolut necesară în realizarea
hologramelor, descoperirea sa a fost concretizată în anul 1963 de către fizicienii Leith şi
Upatnicks, care au obţinut holograme cu ajutorul unui laser He –Ne. Denis Gabor a primit
premiul Nobel în 1971 pentru holografie.
Metoda lui Denis Gabor constă în obţinerea imaginii unui obiect din figura
generală de difracţie Fresnel, produsă de acel obiect. Această metodă a fost numită
holografie (holos = întreg, grafos = scriere, în limba greacă).
Metoda constă în două etape:
- peste un fond luminos coerent se suprapune figura de difracţie Fresnel, produsă de
obiectul luminat coerent cu fondul luminos, interferograma rezultată înregistrată pe o placă
fotografică constituie holograma (care conţine toate informaţiile cu privire la amplitudinea
şi faza luminii difractate de obiect).
- holograma fotografică se iluminează cu un fascicul de lumină paralelă, monocromatică şi
datorită variaţiilor în densitatea optică prezentată de placa fotografică, apar efecte de
difracţie prin care se reconstituie imaginea obiectului.
Experienţa reuşeşte bine dacă se utilizează o sursă de lumină coerentă şi de intensitate
mare. Să analizăm în continuare mai amănunţit modul de realizare a acestor două etape.
Dacă fotografia obişnuită reţine o imagine datorită intensităţii mediate în timp a
luminii provenite din diferite puncte ale obiectului, holograma înregistrează şi informaţia
cuprinsă în faza undei optice transmise sau reflectate de obiect. Dar mediile de înregistrare
disponibile (filme, plăci, detectori foto, etc.), răspund numai la intensitatea luminii

289
(proporţională cu pătratul amplitudinii). Acest fapt, impune înregistrarea informaţiei de
fază prin conversie în variaţii de intensitate, ceea ce se realizează practic prin
interferometrie, unda transmisă sau reflectată de obiect este suprapusă peste o undă de
referinţă care provine de la acelaşi laser, iar figura de interferenţă rezultantă este
întrgistrată pe placa fotografică.
Principiul holografiei este deci simplu. Pentru a putea înregistra şi faza undei sosite
de la un obiect, se foloseşte încă o undă coerentă cu cea obiect, care interferă cu aceasta.
Figura de interferenţă obţinută depinde deci, atât de amplitudinile celor două unde, cât şi
de diferenţa de fază dintre ele în planul hologramei.
Metoda cea mai simplă de a obţine o hologramă este redată în figura 10.1.
Fasciculul luminos emis de un laser şi expandat cu ajutorul unei lentile, este scindat
în două: o parte din fascicul cade pe o oglindă (O) şi cealaltă parte din fascicul cade pe
obiectul de holografiat. Fasciculul reflectat de oglindă reprezintă fasciculul de referinţă, iar
fasciculul reflectat de obiect constituie fasciculul obiect. Ambele fascicule fiind coerente,
interferă la nivelul plăcii fotografice, formând un tablou de interferenţă determinat atât de
amplitudinea cât şi de fazele relative ale undelor reflectate de obiect ( holograma H-).
O
θ
Obiect
Laser
H-
fig. 10.1
Placă fotografică

290
Într-adevăr, lumina reflectată de obiect prezintă modificări în funcţie de poziţia în
spaţiu a diverselor puncte ale obiectului, tabloul de interferenţă (holograma H-)
înregistrând astfel informaţiile de fază.
În acest procedeu, monocromaticitatea şi coerenţa luminii sunt esenţiale, aşa încât
laserii folosiţi curent sunt cei de heliu-neon sau cei cu argon ionizat.
Pentru reconstituirea imaginii, holograma obţinută prin developare (holograma H+)
se plasează în aceeaşi poziţie ca la înregistrare şi se iluminează cu un fascicul de referinţă
identic cu cel de la înregistrare, sub acelaşi unghi de incidenţă (fig. 10.2).
Fasciculul de referinţă se difractă pe hologramă, care se comportă acum ca şi o
reţea de difracţie complicată şi ca atare apar unde având aceeaşi structură ca şi undele
reflectate de obiect (fasciculul obiect). Astfel, holograma reproduce fasciculul obiect
printr-un proces de modulare. Undele produse prin difracţie, formează o imagine virtuală a
obiectului în poziţia în care a fost înregistrat; această imagine clară, nedistorsionată, poate
fi văzută de observator, care are senzaţia că priveşte însuşi obiectul real. În afară de această
imagine primară virtuală, holograma va difracta înspre observator o imagine conjugată
O
θ
Imagine primară virtuală Laser
H+
fig. 10.2
E
Imagine conjugată reală
Placa fotografică cu holograma

291
reală, care apare neclară şi puternic distorsionată. Dacă fasciculul laser de iluminare este
dirijat în sens invers fasciculului iniţial, acesta iluminând partea inversă a hologramei, va
produce o imagine reală a obiectului în locul poziţiei iniţiale a obiectului, imagine care
poate fi înregistrată direct pe o placă fotografică fără a fi necesare lentile.
Hologramele se caracterizează prin urmatoarele:
- o porţiune dintr-o hologramă dă prin iluminare aceeaşi imagine pe care o dă holograma
întreagă, însă cu cât este mai mic fragmentul folosit pentru reconstituirea imaginii, cu atât
este mai slabă claritatea ei.
Această proprietate se explică prin faptul că orice porţinue a unei holograme conţine
înregistrate figurile de interferenţă create de toate punctele obiectului.
- pe aceeaşi placă fotografică se pot înregistra mai multe holograme folosind fascicule
laser orientate sub diverse unghiuri. Se poate obţine astfel stocajul optic al informaţiilor.
Este de menţionat că hologramele, care sunt obţinute de regulă pe plăci fotografice, pot fi
stocate şi pe alţi fotodetectori, cum ar fi: sticlele fotoceramice, receptorii termoplastici,
fotolacurile-polimeri, cristale feroelectrice, etc.
Holografia se aplică în microscopie, în transmiterea imaginilor prin atmosfera
terestră, în stocajul holografic al informaţiilor - un domeniu de mare interes în momentul
actual. Alte aplicaţii şi dezvoltări se referă la hologramele Fourier, hologramele
bidimensionale, de volum, de fază, prin reflexie, în culori, cu radiaţii invizibile, holografia
ultraacustică.
Prelucrarea automată a datelor solicită memorarea unui volum mare de date şi un
rapid acces la informaţiile stocate. Cu ajutorul holografiei (bi sau tridimensionale) se pot
realiza sisteme optice de memorare a datelor de mare capacitate (memorii holografice).
Există procesoare şi calculatoare optice specializate în prelucrarea optică a informaţiei. În
prezent, în multe centre de cercetare din lume se fac cercetări pentru obţinerea de memorii
292
holografice superioare, sau cel puţin competitive cu memoriile actuale folosite de
calculator. Desigur, încă sunt probleme de rezolvat, dar rezultatele obţinute până în prezent
atestă că memoriile holografice şi în general tehnicile de stocare holografică a informaţiei
vor câştiga în competitivitate faţă de altele.
La reconstituirea holografică apare un efect de difracţie, ca şi în imaginea
obiectului difuzant iluminat de un laser, efectul de granularitate “spekle”: obiectul sau
imaginea imaginea dă impresia că este acoperit de o structură granulară foarte fină. S-a
dezvoltat astfel un capitol de optică “spekle” cu multe aplicaţii.
Cu ajutorul holografiei şi a utilizării transformatei Fourier la formarea imaginii în
sistemele optice se poate realiza recunoaşterea formelor, identificarea optică a unui semnal
(de exemplu, de câte ori apare o literă dată într-un text tipărit).
De asemenea, metoda interferometriei holografice poate fi folosită cu succes în
tehnică pentru verificarea şi controlul calităţii şi formei suprafeţelor.
Este de reţinut ca în momentul de faţă hologramele se pot genera pe calculator
(hologramă sintetizată pe calculator). Calculatoarele desenează un sistem de franje care
trecute pe negativ (placa holografică) dau naştere unui fascicul difractat.

293
Bibliografie
1. Ghe. Ciobanu: Termodinamica, Universitatea Bucureşti 1982
2. T. Creţu: Fizică generală, Editura Tehnică 1984
3. D. Demirian: Fizica, U.T.C.B. 1978
4. I. Dima: Electricitate şi magnetism, Universitatea Bucureşti 1981
5. I. Druică Zeletin: Fizica, U:T.C.B. 1989
6. A. Einstein: Teoria relativităţii, Editura Tehnică 1957
7. R. Feymann: Fizica modernă, Editura Tehnică 1970
8. I.A. Friş, K.V. Timoreva: Curs de fizică generală, Editura Tehnică 1964
9. D. Halliday, R. Resnick: Fizica, Editura Didactică şi Pedagogică, 1975
10. A. Hristev: Mecanică şi acustică, Editura Didactică şi Pedagogică, 1984
11. Ch. Kitell, W.D. Knight, M.A. Rudermann: Cursul de fizică Berkeley, Editura
Didactică şi Pedagogică, 1981
12. J.C. Maxwell: Tratat elementar de electricitate, Editura Ştiinţifică şi Enciclopedică
1989
13. I. Newton: Principiile matematice ale filosofiei naturale, Editura Academiei 1969
14. Al. Nicula: Electricitate şi magnetism, Editura Didactică şi Pedagogică, 1973
15. I.M. Popescu: Fizica, Editura Didactică şi Pedagogică, 1982
16. E. Purcell: Cursul de fizică Berkeley, Editura Didactică şi Pedagogică, 1982
17. F.W. Sears, M.W. Zemanskz, H.D. Young: Fizica, Editura Didactică şi Pedagogică,
1983
18. R. Tomulescu: Curs de fizică generală, U:T.C.B., 1992
19. R. Ţiţeica, I. Popescu: Fizică Generală, Editura Tehnică 1971
20. S.G. Landsberg: Optica, Editura Tehnică, 1958
21. G.G. Brătescu: Optica, Editura Didactică şi Pedagogică, 1982
294
22. M. Giurgiu, Fizica, Editura Matrix Rom, 2003
23. M. Giurgea, L. Nasta: Optica, Editura Academiei Române, 1998
24. Şt. Levai, M Bulinski, O. Toma: Optica, Editura Universităţi Bucuresti, 2002
25. M. Giurgiu, Fizica II, Editura Matrix Rom, 2005
26. R. Ţiţeica, I. Popescu: Fizică Generală, Editura Tehnică 1973, 1975
27. I. Iova: Elemente de optică aplicată, Editura Didactică şi Pedagogică, 1982
28. I. Cucurezeanu: Laseri, Editura Academiei RSR, 1966