prototipe kunci pintu menggunakan motor …digilib.unila.ac.id/26616/3/skripsi tanpa bab...
TRANSCRIPT
PROTOTIPE KUNCI PINTU MENGGUNAKAN MOTOR STEPPERBERBASIS ARDUINO MEGA 2560 DENGAN PERINTAH SUARA PADA
ANDROID
(Skripsi)
Oleh
GUNTUR NANDA PRAKASA
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
2017

ABSTRAK
Prototipe Kunci Pintu Menggunakan Motor Stepper Berbasis Arduino Mega 2560dengan Perintah Suara pada Android
Oleh
GUNTUR NANDA PRAKASA
Kunci memegang peranan penting dalam sebuah sistem keamanan.Sistem kunci pintu rumah
yang ada sekarang ini sebagian besar masih menggunakan kunci mekanik konvensional.
Perkembangan teknologi digital memberikan solusi kemudahan dalam sebuah sistem kunci
sebagai pengaman. Berdasarkan hal tersebut di atas, terpikirkan oleh penulis untuk membuat
pengaman pintu yang dapat dikendalikan dari jarak jauh sehingga dapat memudahkan
pemilik rumah untuk mengontrol kunci pintu ketika lupa mengunci atau menaruh kunci pintu.
Aplikasi voice controller merupakan aplikasi berbasis sistem operasi android yang digunakan
untuk mengenali kata perintah. Aplikasi menggunakan komunikasi bluetooth dalam
pengendaliannya sehingga aplikasi ini dapat beroperasi dalan jarak 1 hingga 14 meter pada
kondisi ruang terbuka. Pengendalian kecepatan motor dc jenis stepper ini mengatur sudut dan
arah gerak motor menggunakan rangkaian driver motor stepper.
Hasil penelitian memperlihatkan bahwa semakin berat beban yang diberikan pada alat ini
maka nilai daya saat membuka dan mengunci pintu tetap konstan.Prototipe kunci pintu
dengan kendali suara berbasis arduino mega 2560 hanya diberikan beban 0,08 kg , 0,115 kg,
0,128 kg, dan 0,170 kg.
Kata kunci: Kunci , Motor Stepper , Mikrokontroler Arduino Mega 2560, Driver Motor
Stepper.

ABSTRACT
PROTOTYPE DOOR LOCK USING MOTOR STEPPER BASED ARDUINO MEGA2560 WITH VOICE COMMANDS ON ANDROID
By
Guntur Nanda Prakasa
The key plays an important role in security system. The house door lock system which exist
today largely is still using a conventional mechanical key. The development of digital
technology provides convenience in key system for safety. Based on reason, the work
focused on desaigning safety doors that can be controlled remotely, therefore it is easier
for the owners to control door lock when forgetting to lock.
Voice application controller is the Android operating system-based application that is used to
identify the command word. The application using bluetooth communication so that it can
operate within a distance of 1 to 14 meters in open space.The DC motor speed control set the
angle and direction of motion of the motor by using the stepper motor driver circuit .
The result showed that the of larger the load,the power for locking and releasing the key is
still contants. The prototype of this voice control locked system manage the load of 0.08 kg,
0.115 kg, 0.128 kg, and 0.170 kg.
Keywords: Key, Stepper Motor, Arduino Mega Microcontroller 2560 , Driver Stepper motor.
PROTOTIPE KUNCI PINTU MENGGUNAKAN MOTOR STEPPERBERBASIS ARDUINO MEGA 2560 DENGAN PERINTAH SUARA PADA
ANDROID
Oleh
GUNTURNANDA PRAKASA
Skripsi
Sebagai Salah Satu Syarat Untuk Mencapai GelarSARJANA TEKNIK
Pada
Jurusan Teknik ElektroFakultas Teknik Universitas Lampung
FAKULTAS TEKNIKUNIVERSITAS LAMPUNG
BANDAR LAMPUNG2017
RIWAYAT HIDUP
Penulis dilahirkan di Tanjung Baru Timur, Lampung pada tanggal 05 Agustus 1994
sebagai anak Pertama dari tiga bersaudara, dari bapak Edi saputra dan ibu Erna Wati.
Pendidikan sekolah dasar diselesaikan di SDN 1 Tanjung Baru Timur pada tahun
2006, Sekolah Menengah Pertama di SMPN 1 Bukit Kemuning diselesaikan pada
tahun 2009, dan Sekolah Menengah Atas di SMAN 1 Bukit Kemuning diselesaikan
pada tahun 2012.
Pada tahun 2012, Penulis terdaftar sebagai mahasiswa Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung melalui jalur SNMPTN (Seleksi Nasional
Masuk Perguruan Tinggi Negeri) Tes Tertulis 2012. Selama menjadi mahasiswa
penulis pernah menjadi asisten Laboratorium Konversi Energi Elektrik Universitas
Lampung pada tahun 2014-2017. Penulis juga aktif dalam organisasi Himpunan
Mahasiswa Teknik Elektro (HIMATRO) sebagai Kepala Divisi Kewirausahaan pada
tahun 2014-2015 dan Anggota Divisi Pendidikan pada tahun 2013-2014. Pada 4
Februari - 3 Maret 2015, Penulis melaksanakan Kerja Praktik di PT.PERTAMINA
RU III PLAJU.
PERSEMBAHAN
Dengan Ridho Allah SWT, teriring shalawat kepada Nabi Muhammad
Shalallahu Alaihi W assalam Karya tulis ini kupersembahkan untuk:
Ayah dan Ibuku TercintaEdi Saputra & Erna Wati
Serta Adikku TersayangJerry Equardo dan Della Dinda Aprillia
Keponakan TersayangRafael nikolas sadewa, Moura violen azzhalea andrie , dan Marissa shesa
nova
Teman-teman kebanggaankuRekan-rekan Jurusan Teknik Elektro
AlmamaterkuUniversitas Lampung
Bangsa dan NegarakuRepublik Indonesia
Terima-kasih untuk semua yang telah diberikan kepadaku. JazzakallahKhairan.
11
MOTTO
“Diwajibkan atas kamu berperang, padahal berperang itu adalah sesuatu yang kamu
benci. Boleh jadi kamu membenci sesuatu, padahal ia amat baik bagimu, dan boleh jadi (pula)
kamu menyukai sesuatu, padahal ia amat buruk bagimu; Allah mengetahui, sedang kamu
tidak mengetahui."
(Al-Quran, Surat Al-Baqarah: 216)
“Karena Sesungguhnya sesudah kesulitan itu ada kemudahan.
Sesungguhnya sesudah kesulitan itu ada kemudahan.”
( Al-Quran, Surat Al – Insyirah, 94 : 5 – 6 )
“Tidak ada balasan untuk kebaikan selain kebaikan (pula)”
(Al-Quran, Surat Ar – Rahman, 55 : 60)
“Apabila manusia telah meninggal dunia maka terputuslah semua amalannya kecuali tiga
amalan : shadaqah jariyah, ilmu yang bermanfaat, dan anak sholih yang mendoakan dia.”
( HR. Muslim )
“Manusia yang berakal ialah
manusia yang suka menerima dan meminta nasihat.”
( Umar bin Khatab RA )
SANWACANA
Puji syukur kehadirat Allah SWT yang telah melimpahkan rahmat dan hidayahnya
kepada penulis, sehingga dapat terselesaikanya tugas akhir ini. Shalawat serta
salam disanjungkan kepada Nabi Muhammad Shalallahu Alaihi Wassalam yang
dinantikan syafaatnya di hari akhir kelak.
Skripsi yang berjudul “PROTOTIPE KUNCI PINTU MENGGUNAKAN
MOTOR STEPPER BERBASIS ARDUINO MEGA 2560 DENGAN
PERINTAH SUARA PADA ANDROID” digunakan sebagai salah satu syarat
guna memperoleh gelar sarjana di jurusan Teknik Elektro Fakultas Teknik
Universitas Lampung.
Dalam masa perkuliahan dan penelitian, penulis mendapat banyak hal baik berupa
dukungan, semangat, motivasi dan banyak hal yang lainya. Untuk itu penulis
mengucapkan terimakasih kepada :
1. Bapak Prof. Dr. Ir. Hasriadi Mat Akin, M.P. selaku Rektor Universitas
Lampung.
2. Bapak Prof. Suharno, M.Sc., Ph.D. selaku Dekan Fakultas Teknik Universitas
Lampung.
3. Bapak Dr. Ing. Ardian Ulvan, S.T., M.Sc. Selaku kepala Jurusan Teknik Elektro
fakultas Teknik Universitas Lampung.
4. Bapak Ir. Noer Soedjarwanto, M.T. selaku Dosen Pembimbing Utama.
Terimakasih atas kesedian waktunya untuk membimbing dan memberikan
ilmu.
5. Bapak Ozea Zebua,S.T.,M.T. selaku pembimbing kedua. Terimakasih atas
waktu dan bimbinganya selama mengerjakan tugas akhir
6. Bapak Dr. Ahmad Saudi Samosir ,S.T.,M.T. selaku dosen penguji tugas akhir.
Terimakasih atas masukan guna membuat tugas akhir ini menjadi lebih baik.
7. Seluruh Dosen Teknik Elektro, Terimakasih atas bimbingan dan ilmu yang
telah diberikan selama menuntut ilmu di Jurusan Teknik Elektro Universitas
Lampung.
8. Keluarga Besar Teknik Elektro, Mbak Ning, Mbak Diah, Mas Daryono , Mas
Riyadi dll, terimakasih atas kebersamaan dan waktu serta ilmu yang telah
diberikan.
9. Ayah dan Ibu, Edi Saputra dan Erna Wati. Tiada kata yang dapat tertulis atas
segala pengorbanan yang kalian lakukan untuk hidupku, hanya terimakasih
yang tak terkira atas segala yang telah dilakukan untukku.
10. Adiku Jerry Equardo dan Della Dinda Aprillia terimakasih atas motivasi dan
dukunganya agar segera menyelesaikan Tugas Akhir ini.
11. Ikko, Gio, Mona, Riska, Khorik, dan Citra Keluarga KKN Periode Juli 2015-
2016 terimakasih atas do’a, motivasi, serta hal-hal yang telah membuat penulis
semangat untuk mengerjakan Tugas Akhir ini..
12. Teman Seperjuangan Skripsi Andri Abadi,S.T., Mahendra Dwi G, S.T. Winal
Prawira, Yogi Aldino, Faizun Z, Kris Sivam, Angga Kurniawan dan teman-
teman yang tidak bisa penulis sebutkan satu persatu.
13. Kepada Adik adik ELANG 12’ Bella Nurbaity Shafira, S.T., Ratih Ningtyas,
Windy Selviana, Gusti Robiatul A, Desi Purnama Sari, Dika Fauzia , dan
Risdawati Hutabarat, S.T. terimakasih atas do’a, motivasi, serta hal-hal yang
telah membuat penulis semangat untuk mengerjakan Tugas Akhir ini.
14. Kak Adit Hartanto, S.T.,Kak Denny Firmansyah Z, S.T., Kak Apriwan Rizki,
S.T. dan Kak Habib Sutriharjo, S.T. Terimakasih telah banyak membantu
penulis dalam mengerjakan Tugas Akhir ini sehingga selesai dengan baik.
15. Sahabat Konversi (Aji P, Rio, Dharma, Ipan , Panji, Yayan, Gusti, Hardy,
Agung D.S, Hekson, Paian, Andre BA , Pitia , Nabilla dan Rendi) terimakasih
atas kebersamaanya selama ini.
16. Rizki Alandani, C.S.T dan Rudi Ernansyah (Sensei Yang Terhormat)
terimakasih telah mengajari serta menemani hingga penulis mendapatkan gelar
S.T semoga cepat menyusul.
17. Kepada Teman Seperjuangan Eldineri Zulkarnain,S.P , Windu Nur Hardiranto
dan Zaki Mubarok, A.Md.Pet terimakasih banyak karna telah merepotkan
selama ini.
18. Teman-teman keluarga besar ELANG (Elektro Angkatan) 2012 terimakasih
atas segala yang telah diberikan.
Semoga apa yang telah diberikan selama ini mendapat balasan yang lebih baik
dari dari Allah SWT.
Bandar lampung, April 2017
Penulis,
Guntur Nanda Prakasa
DAFTAR ISI
Halaman
DAFTAR ISI .....................................................................................................i
DAFTAR GAMBAR .........................................................................................v
DAFTAR TABEL .............................................................................................vii
BAB 1 PENDAHULUAN
1.1 Latar Belakang .............................................................................................. 1
1.2 Tujuan Penelitian ........................................................................................... 3
1.3 Manfaat Penelitian ......................................................................................... 3
1.4 Rumusan Masalah .......................................................................................... 3
1.5 Batasan Masalah ............................................................................................ 4
1.6 Hipotesis ........................................................................................................ 4
1.7 Sistematika Penulisan .................................................................................... 4
BAB II TINJAUAN PUSTAKA
2.1 Motor Stepper ................................................................................................. 6
2.2 Pengendali Motor Stepper ............................................................................... 10
2.3 Arduino Mega 2560 ........................................................................................ 11
2.4 Bluetooth HC-05 Module ................................................................................ 12
2.5 Pemograman Android ..................................................................................... 13
2.5.1 Paket Android Speech ........................................................................... 13
2.5.2 Paket Bluetooth Android ....................................................................... 15
2.5.2.1 Bluetooth Permission ................................................................ 17

ii
BAB III METODE PENELITIAN
3.1 Waktu dan Tempat Penelitian ......................................................................... 19
3.2 Alat dan Bahan ................................................................................................ 19
3.3 Metode Penelitian............................................................................................ 20
3.3.1 Studi Literatur ....................................................................................... 20
3.3.2 Perancangan Alat dan Sistem ................................................................ 20
a. Penentuan komponen ........................................................................ 20
b. Perancangan Hardware .................................................................... 21
c. Perancangan Software ....................................................................... 21
d. Perancangan Program pada Mikrokontroler Arduino ...................... 21
3.3.3 Pengujian Alat dan Sistem ................................................................... 26
a. Pengujian Pengenalan Suara ............................................................. 27
b. Pengujian Arduino ............................................................................ 27
c. Pengujian Kontrol Motor Stepper ..................................................... 27
3.3.4 Analisa Sistem ...................................................................................... 28
a. Deskripsi Umum Sistem ................................................................... 28
b. Analisa Sistem Voice Recognition .................................................... 29
c. Analisa Rangkaian Kendali Motor Stepper ...................................... 31
3.4 Diagram Alir penelitian................................................................................... 32
3.5 Analisa dan Kesimpulan ................................................................................. 32
BAB IV HASIL DAN PEMBAHASAN
4.1 Perancangan Alat ............................................................................................ 34
iii
4.2 Pelaksanaan Perangkat Keras dan Pengujian .................................................. 35
4.2.1 Sistem Rangkaian Sistem Keseluruhan ................................................ 35
4.2.2 Bentuk Fisik Sistem Perangkat Keras ................................................... 36
4.2.3 Mikrokontroler Arduino Mega 2560 ................................................... 37
4.2.4 Motor Arus Searah Jenis Stepper .......................................................... 37
4.2.5 Driver motor stepper (Easy Driver Stepper) ......................................... 38
4.2.6 Power Supply ........................................................................................ 39
4.3 Hasil Perancangan Aplikasi Kunci Pintu via Android .................................... 39
4.4 Pengujian Aplikasi Android ............................................................................ 42
4.4.1 Pengujian Aplikasi Voice Controller .................................................... 42
4.4.2 Pengujian Perangkat Bluetooth ............................................................. 45
4.4.3 Pengujian Komunikasi USART ........................................................... 46
4.4.4 Pengujian Perangkat Keras secara Keseluruhan ................................... 48
4.5 Pengujian Beban.............................................................................................. 49
4.5.1 Pengujian dengan beban 0.080 kg ....................................................... 49
4.5.2 Pengujian dengan beban 0.115 kg ...................................................... 49
4.5.3 Pengujian dengan beban 0.128 kg ....................................................... 50
4.5.4 Pengujian dengan beban 0.170 kg ....................................................... 50
4.6 Perhitungan Daya dan Torsi Motor ................................................................ 52
4.6.1 Hasil Perhitungan Daya dan Torsi Motor dengan 0.080 kg .................. 52
4.6.2 Hasil Perhitungan Daya dan Torsi Motor dengan beban 0.115 kg ..... 53
4.6.3 Hasil Perhitungan Daya dan Torsi Motor dengan beban 0.128 kg ...... 55
4.6.4 Hasil Perhitungan Daya dan Torsi Motor dengan beban 0.170 kg ...... 56
iv
4.7 Pembahasan ..................................................................................................... 58
4.8 Kelebihan dan Kekurangan ............................................................................ 59
4.8.1 Kelebihan .............................................................................................. 60
4.8.2 Kekurangan ........................................................................................... 61
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan ..................................................................................................... 62
5.2 Saran ................................................................................................................ 63
DAFTAR PUSTAKA
LAMPIRAN
v
DAFTAR GAMBAR
Gambar Halaman
2.1 Penampang melintang dari motor stepper tipe variable reluctance (VR) 8
2.2 Ilustrasi sederhana dari motor stepper tipe permanent magnet (PM) .. 9
2.3 Penampang melintang dari motor stepper tipe hibrid .......................... 10
2.4 Easy Driver Stepper Motor .................................................................. 10
2.5 (a) bentuk pulsa keluaran dari pengendali motor stepper .......................... 11
2.5 (b) penerapan pulsa pengendali pada motor stepper dan arah putaran yang
bersesuaian ........................................................................................... 11
2.6 Arduino mega 2560 .............................................................................. 12
2.7 Modul bluetooth HC-05 ....................................................................... 13
2.8 Bluetooth Permission untuk mengaktifkan Perangkat Bluetooth ........ 18
3.1 Diagram alir mikrokontroler arduino .................................................. 24
3.2 Pengendali Motor Stepper .................................................................... 27
3.3 Blok Diagram Perancangan Alat ......................................................... 29
3.4 Diagram Alir Aplikasi pada Android .................................................. 30
3.5 Rangkaian shield arduino .................................................................... 31
3.6 Diagram alir penelitian ......................................................................... 32
4.1 Rangkaian Sistem Secara Keseluruhan ............................................... 36
4.2 Bentuk Fisik Sistem Perangkat Keras ................................................. 36
vi
4.3 Arduino Mega 2560 ............................................................................. 37
4.4 Motor DC Jenis Stepper ....................................................................... 38
4.5 Easy Driver Stepper ............................................................................ 38
4.6 Power Supply ....................................................................................... 39
4.7 Diagram Blok Perancangan Tampilan Login Aplikasi Pada
Smartphone ............................................................................................. 40
4.8 Diagram Blok Perancangan Tampilan Aplikasi Pada Smartphone ..... 40
4.9 Tampilan Login Aplikasi Pada Smartphone ....................................... 41
4.10 Tampilan Aplikasi Pada Smartphone ................................................... 41
4.11 Tampilan Perangkat Bluetooth Terhubung ......................................... 43
4.12 Tampilan Penelusuran Suara Google .................................................. 44
4.13 Tampilan Hasil Pengenalan Kata ......................................................... 44
4.14 Hasil pengujian Komunikasi USART dengan perintah “1” ................. 47
4.15 Hasil pengujian Komunikasi USART dengan perintah “2” ................ 47
4.16 Hasil pengujian Komunikasi USART dengan perintah “8” ................. 48
4.17 Hasil pengujian Komunikasi USART dengan perintah “9” ................ 48
4.18 Grafik Hubungan antara Arus terhadap beban pada saat membuka kunci
pintu dan mengunci pintu ................................................................... 51
4.19 Grafik Hubungan Daya terhadap Beban pada saat membuka kunci pintu
dan mengunci pintu ............................................................................. 58
vii
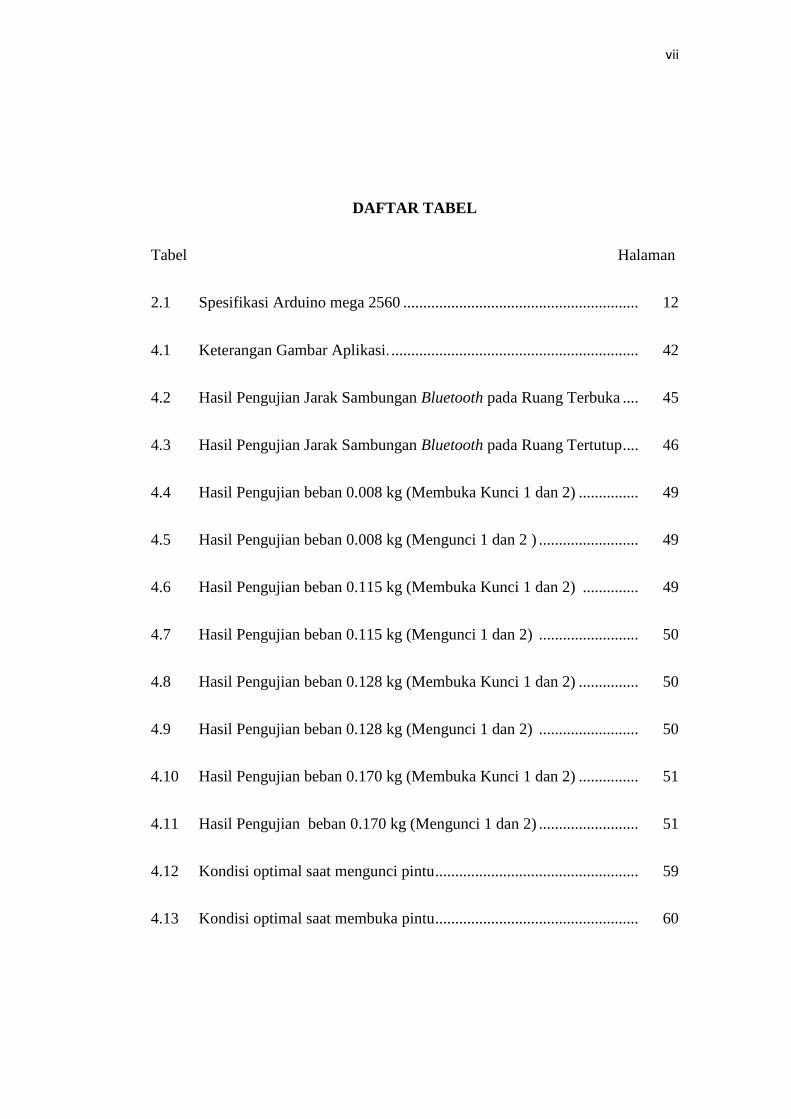
DAFTAR TABEL
Tabel Halaman
2.1 Spesifikasi Arduino mega 2560 ........................................................... 12
4.1 Keterangan Gambar Aplikasi. .............................................................. 42
4.2 Hasil Pengujian Jarak Sambungan Bluetooth pada Ruang Terbuka .... 45
4.3 Hasil Pengujian Jarak Sambungan Bluetooth pada Ruang Tertutup .... 46
4.4 Hasil Pengujian beban 0.008 kg (Membuka Kunci 1 dan 2) ............... 49
4.5 Hasil Pengujian beban 0.008 kg (Mengunci 1 dan 2 ) ......................... 49
4.6 Hasil Pengujian beban 0.115 kg (Membuka Kunci 1 dan 2) .............. 49
4.7 Hasil Pengujian beban 0.115 kg (Mengunci 1 dan 2) ......................... 50
4.8 Hasil Pengujian beban 0.128 kg (Membuka Kunci 1 dan 2) ............... 50
4.9 Hasil Pengujian beban 0.128 kg (Mengunci 1 dan 2) ......................... 50
4.10 Hasil Pengujian beban 0.170 kg (Membuka Kunci 1 dan 2) ............... 51
4.11 Hasil Pengujian beban 0.170 kg (Mengunci 1 dan 2) ......................... 51
4.12 Kondisi optimal saat mengunci pintu ................................................... 59
4.13 Kondisi optimal saat membuka pintu ................................................... 60

I. PENDAHULUAN
1.1. Latar Belakang
Kunci memegang peranan penting dalam sebuah sistem keamanan.Sistem kunci
pintu rumah yang ada sekarang ini sebagian besar masih menggunakan kunci
mekanik konvensional. Perkembangan teknologi digital memberikan solusi
kemudahan dalam sebuah sistem kunci sebagai pengaman.
Berdasarkan hal tersebut di atas, terpikirkan oleh penulis untuk membuat pengaman
pintu yang dapat dikendalikan dari jarak jauh sehingga dapat memudahkan pemilik
rumah untuk mengontrol kunci pintu ketika lupa mengunci atau menaruh kunci
pintu.
Pada saat ini perkembangan teknologi seluler telah mengalami kemajuan yang
sangat cepat. Hal ini ditunjukkan oleh munculnya bermacam-macam jenis ponsel
pintar atau sering disebut dengan smartphone. Ponsel pintar saat ini telah
menyajikan teknologi-teknologi yang dapat memberikan kemudahan bagi para
penggunanya. Dari segi operating system, ponsel pintar saat ini telah banyak
jenisnya seperti android, windows 8, ios dan masih banyak lagi.
Dari banyaknya fitur yang ditawarkan oleh ponsel pintar saat ini, ada salah satu
teknologi yang cukup memberikan kemudahan bagi penggunanya yaitu fitur
pengenalan ucapan atau speech recognition. Dalam sistem operasi android, fitur
speech recognition telah diberikan oleh google untuk pengguna melakukan

2
penelusuran menggunakan suara. Dimana pengguna hanya dengan mengucapkan
kata atau kalimat maka pengguna terebut dapat menggunakan mesin pencari
google. Berawal dari fitur inilah, timbul sebuah pemikiran untuk lebih
memanfaatkan fitur speech recognition pada ponsel android untuk mengendalikan
sebuah motor arus searah jenis stepper. Dimana dengan mengucapkan sebuah kata
perintah, motor ini dapat dikendalikan sesuai keinginan.
Motor arus searah atau sering di sebut motor dc merupakan jenis motor listrik yang
banyak digunakan sehari-hari. Aplikasi dari motor dc biasanya digunakan pada
aplikasi yang menggunakan torsi besar. Motor dc sering digunakan pada peralatan
pengangkat beban yang berat serta pada penggerak kendaraan bermotor. Dalam
penggunaannya motor dc jenis stepper ini dapat dilakukan pengaturan sudut rotasi
motor proporsional dengan pulsa masukan sehingga lebih mudah diatur. Dalam
pengendalian motor dc jenis stepper ini bisa dilakukan dengan mengubah nilai
sudut rotasi motor proporsional dengan pulsa masukan.
Selain bertujuan untuk memberikan kemudahan dalam pengoperasian suatu
peralatan, perlu juga dipikirkan bagaimana sebuah peralatan dapat dioperasikan
secara lebih luas dan fleksibel. Dengan tingginya mobilitas dari si pengguna, sebuah
peralatan dituntut untuk dapat digunakan lebih mudah. Disinilah pemanfaatan fitur
komunikasi tanpa kabel yaitu bluetooth. Dengan menggunakan komunikasi
bluetooth ini pengendalian operasi motor dc jenis stepper ini dapat lebih luas hingga
jarak 15 meter.
Dengan penjelasan hal-hal di atas penulis ingin mengangkat tugas akhir dengan
judul “Prototipe Kunci Pintu Menggunakan Motor Stepper Berbasis Arduino
Mega 2560 dengan Perintah Suara pada Android”.
3
1.2. Tujuan Penelitian
Penelitian ini memiliki beberapa tujuan, yaitu:
1. Menciptakan sebuah alat pengendali kunci pintu yang dapat dikendalikan
dengan perintah suara.
2. Merancang sebuah aplikasi berbasis sistem operasi android untuk membantu
pengendalian motor stepper.
3. Memperluas jangkauan pengendalian motor stepper dengan sistem komunikasi
bluetooth.
1.3. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah memberikan kemudahan bagi
orang yang menggunakan alat ini tanpa menggunakan kunci konvensional ketika
orang lupa mengunci atau menaruh kunci pintu dan juga sering tertinggal atau
hilang kuncinya. Maka dengan alat ini hanya dengan mengucapkan perintah suara
melalui smartphone kunci pintu otomatis ini dapat terbuka atau terkunci tanpa
menggunakan kunci pintu seperti biasanya. .
1.4 Rumusan Masalah
Dalam melaksanakan penelitian ini digunakan beberapa rumusan masalah yaitu:
1. Bagaimana mengendalikan kunci pintu menggunakan motor stepper dengan
perintah suara berbasis mikrokontroller.
2. Bagaimana membuat aplikasi berbasis sistem operasi android untuk membantu
pengendalian motor stepper.
3. Bagaimana memperluas jangkauan dari alat pengendali kunci ini.
4
1.5. Batasan Masalah
Penelitian ini memiliki beberapa batasan masalah, yaitu:
1. Perintah suara memanfaatkan fitur speech recognition dari sistem operasi
android yang berbasis penelusuran suara google yang diakses secara online.
2. Hanya menggunakan Easy Driver Stepper sebagai pengendali motor stepper
untuk membuka dan menutup kunci pintu.
3. Tidak membahas secara detail proses konversi speech recognition pada sistem
operasi android.
4. Keamanan kunci pintu ini sama seperti pintu lainnya hanya saja kunci pintu ini
lebih memudahkan pengguna dibandingkan kunci konvensional.
1.6. Hipotesis
Pada penelitian ini dengan memanfaatkan fitur speech recognition pada sistem
operasi android maka dapat mengirimkan perintah suara ke mikrokontroler melalui
komunikasi bluetooth. Dengan perintah yang diterima ini, mikrokontroler akan
memprosesnya dan mengendalikan motor stepper untuk membuka dan mengunci
pintu melalui driver motor stepper.
1.7. Sistematika Penulisan
Adapun sistematika penulisan yang digunakan dalan penelitian ini adalah sebagai
berikut,
I. PENDAHULUAN
Bab ini berisi tentang latar belakang penelitian, tujuan penelitian, manfaat
penelitian, rumusan masalah, batasan masalah, hipotesis, dan sistematika
penulisan laporan penelitian.
5
II. TINJAUAN PUSTAKA
Bab kedua ini berisi tentang dasar teori yang akan digunakan sebagai acuan
dalam perancangan alat, analisa serta pembahasan yang didapat setelah
melakukan penelitian.
III. METODE PENILITIAN
Bab ketiga ini mengulas tentang alat-alat, prosedur, serta metode perancangan
yang digunakan pada penelitian ini.
IV. HASIL DAN PEMBAHASAN
Bab berikut ini berisi hasil yang didapat setelah melakukan penelitian serta
menganalisa hasil penelitian tersebut.
V. KESIMPULAN DAN SARAN
Bab terakhir ini berisi tetang kesimpulan yang didapat setelah melakukan
penelitian serta menuliskan saran-saran yang mungkin menjadi acuan untuk
perkembangan alat ini kedepannya.
II. TINJAUAN PUSTAKA
2.1Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah
pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak
berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk
menggerakkan motor stepper diperlukan pengendali motor stepper yang
membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki
beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa.
Keunggulannya antara lain adalah :
Sudut rotasi motor proporsional dengan pulsa masukan sehingga
lebih mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai
bergerak.
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi .
Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik
(perputaran).
Murah dan banyak dijumpai dipasaran
Dapat menghasilkan perputaran yang lambat sehingga beban dapat
dikopel langsung ke porosnya.
Pada motor stepper umumnya tertulis spesifikasi Np (pulsa / rotasi). Sedangkan
7
kecepatan pulsa diekspresikan sebagai pps ( pulsa per second) dan kecepatan putar
umumnya ditulis sebagai ω (rotasi / menit atau rpm). Kecepatan putar motor stepper
(rpm) dapat diekspersikan menggunakan kecepatan pulsa (pps) sebagai berikut :
𝜔 =2∗𝑝ℎ𝑖∗𝑛
60 [rps]
𝜔 =2∗3.14∗𝑛
60 ............................................................................. (1)[11]
Keterangan :
𝜔 = rps
n = Step/ Putaran (pulsa/ rotasi)
Torsi yang dapat dihasilkan oleh motor stepper dapat dihitung berdasarkan
perbandingan daya kerja motor terhadap kecepatan putarannya atau dapat
dirumuskan sebagai berikut :
τ =𝑷
𝜔 ........................................................................................ (2) [10]
Keterangan :
τ = Torsi (Newton meter)
P = Daya Kerja Motor (Watt)
𝜔 = Kecepatan sudut (rps)
Untuk mengetahui beban maksimum yang dapat digerakkan motor stepper dapat
diperoleh dengan menghitung torsi dengan menggunakan rumus :
τ = F. L ................................................................................... (3) [10]
Keterangan :
F = Gaya berat yang bekerja terhadap motor (Newton)
L = Panjang lengan yang bergerak pada motor (meter)
8
Gaya berat yang bekerja terhadap motor dapat dituliskan dengan :
F = m. g .................................................................................. (4) [10]
Keterangan :
m = Massa (Kg)
g = Percepatan gravitas (m/s2)
Pada dasaranya terdapat 3 tipe motor stepper yaitu:
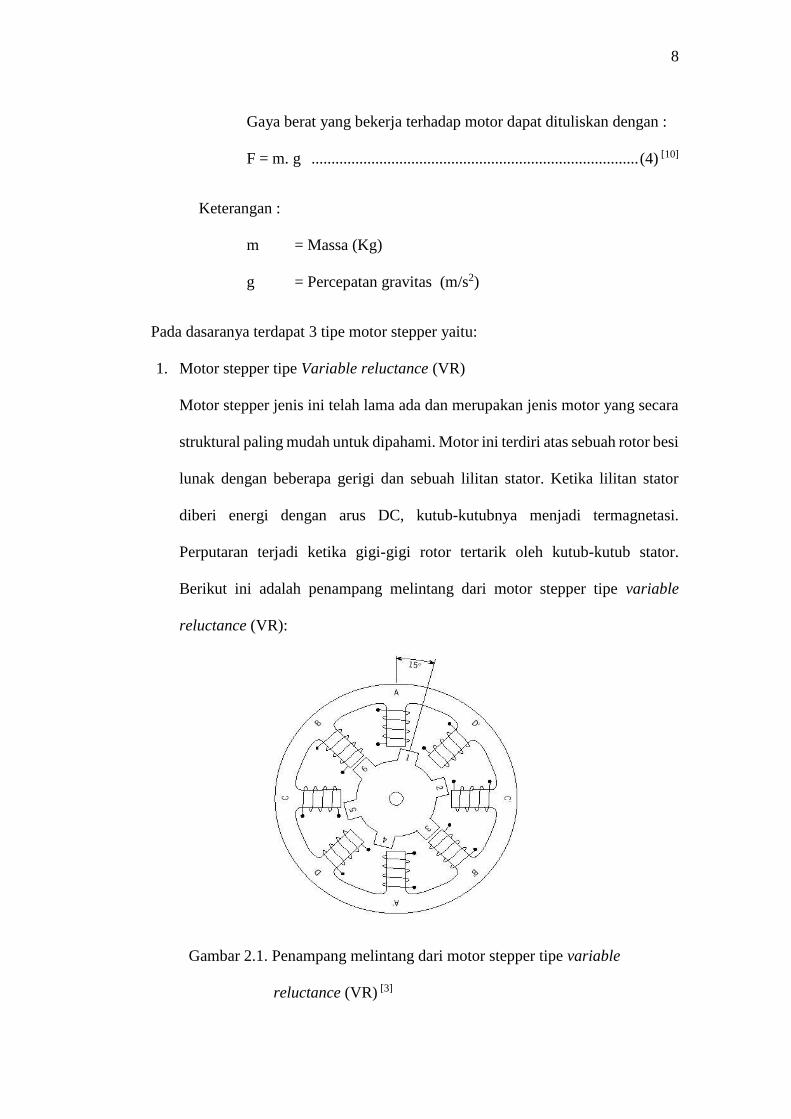
1. Motor stepper tipe Variable reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara
struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi
lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator
diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi.
Perputaran terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator.
Berikut ini adalah penampang melintang dari motor stepper tipe variable
reluctance (VR):
Gambar 2.1. Penampang melintang dari motor stepper tipe variable
reluctance (VR) [3]
9
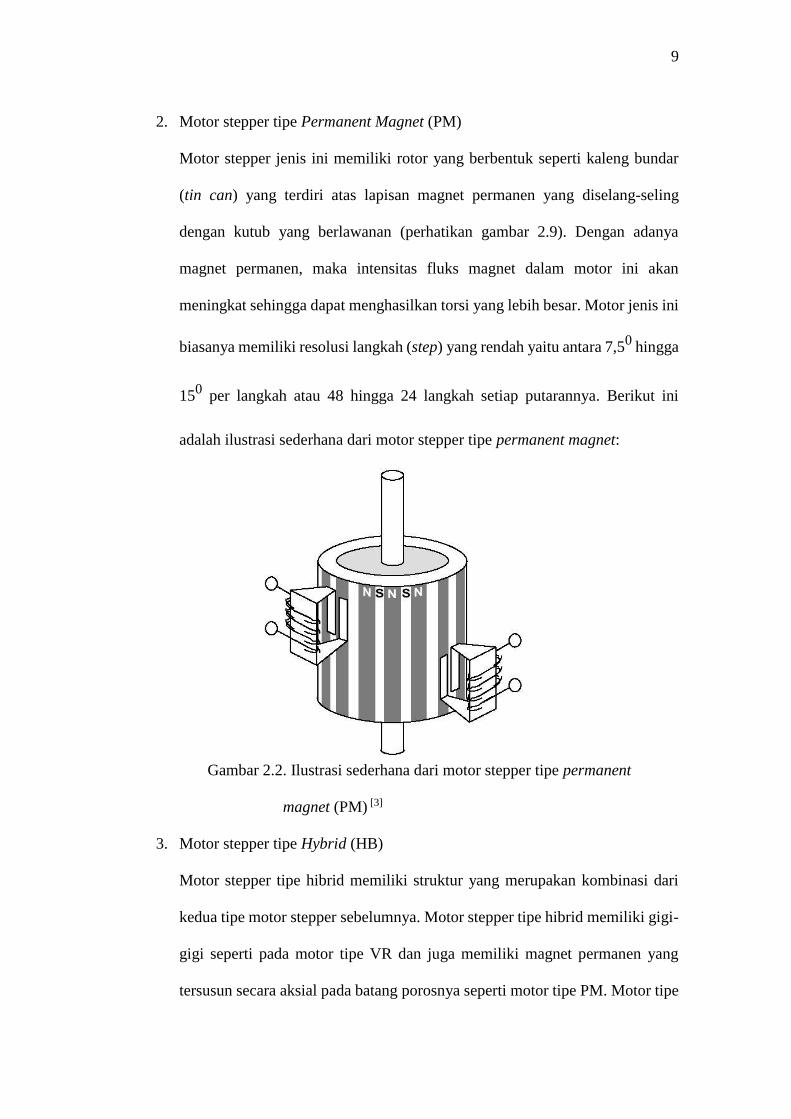
2. Motor stepper tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar
(tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling
dengan kutub yang berlawanan (perhatikan gambar 2.9). Dengan adanya
magnet permanen, maka intensitas fluks magnet dalam motor ini akan
meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini
biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,50 hingga
150 per langkah atau 48 hingga 24 langkah setiap putarannya. Berikut ini
adalah ilustrasi sederhana dari motor stepper tipe permanent magnet:
Gambar 2.2. Ilustrasi sederhana dari motor stepper tipe permanent
magnet (PM) [3]
3. Motor stepper tipe Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari
kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gigi-
gigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang
tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe
10
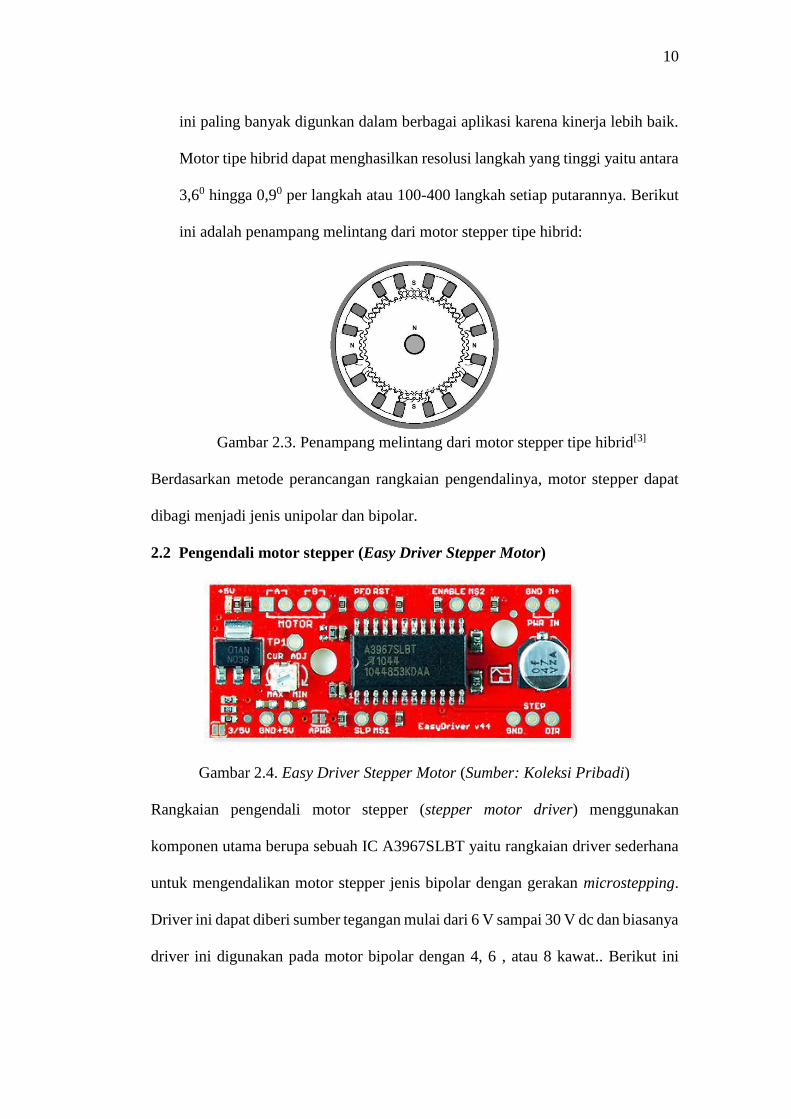
ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik.
Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara
3,60 hingga 0,90 per langkah atau 100-400 langkah setiap putarannya. Berikut
ini adalah penampang melintang dari motor stepper tipe hibrid:
Gambar 2.3. Penampang melintang dari motor stepper tipe hibrid[3]
Berdasarkan metode perancangan rangkaian pengendalinya, motor stepper dapat
dibagi menjadi jenis unipolar dan bipolar.
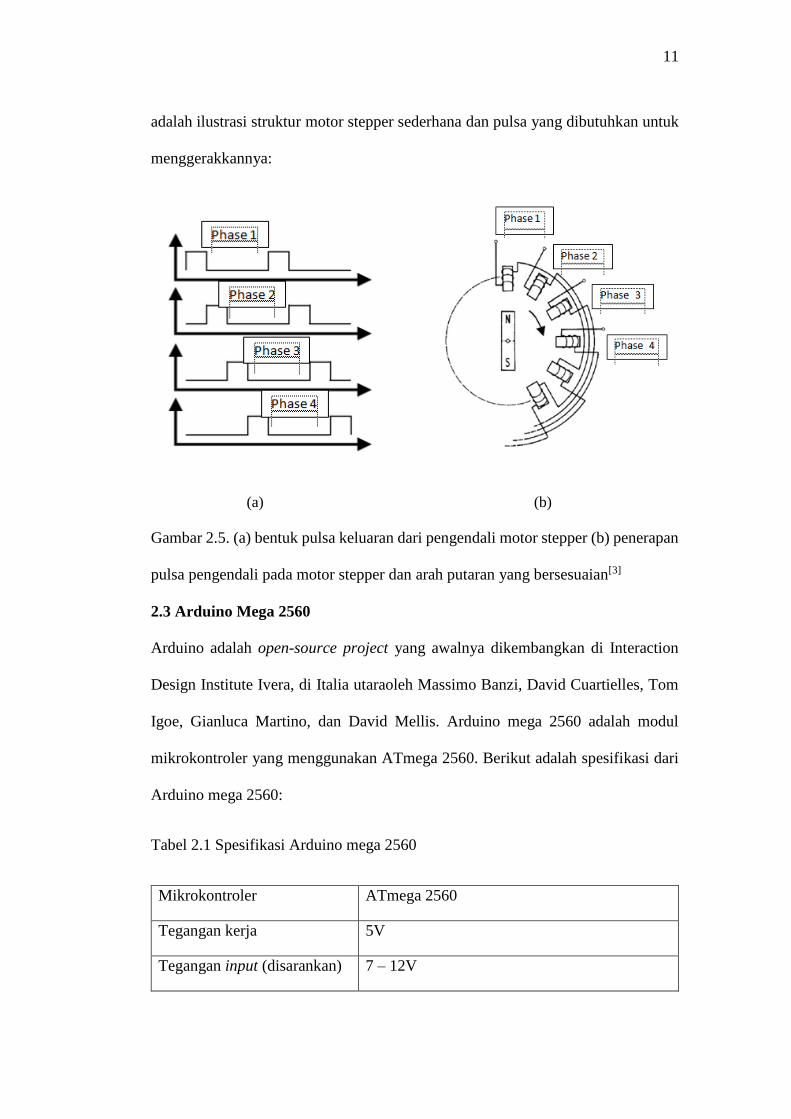
2.2 Pengendali motor stepper (Easy Driver Stepper Motor)
Gambar 2.4. Easy Driver Stepper Motor (Sumber: Koleksi Pribadi)
Rangkaian pengendali motor stepper (stepper motor driver) menggunakan
komponen utama berupa sebuah IC A3967SLBT yaitu rangkaian driver sederhana
untuk mengendalikan motor stepper jenis bipolar dengan gerakan microstepping.
Driver ini dapat diberi sumber tegangan mulai dari 6 V sampai 30 V dc dan biasanya
driver ini digunakan pada motor bipolar dengan 4, 6 , atau 8 kawat.. Berikut ini
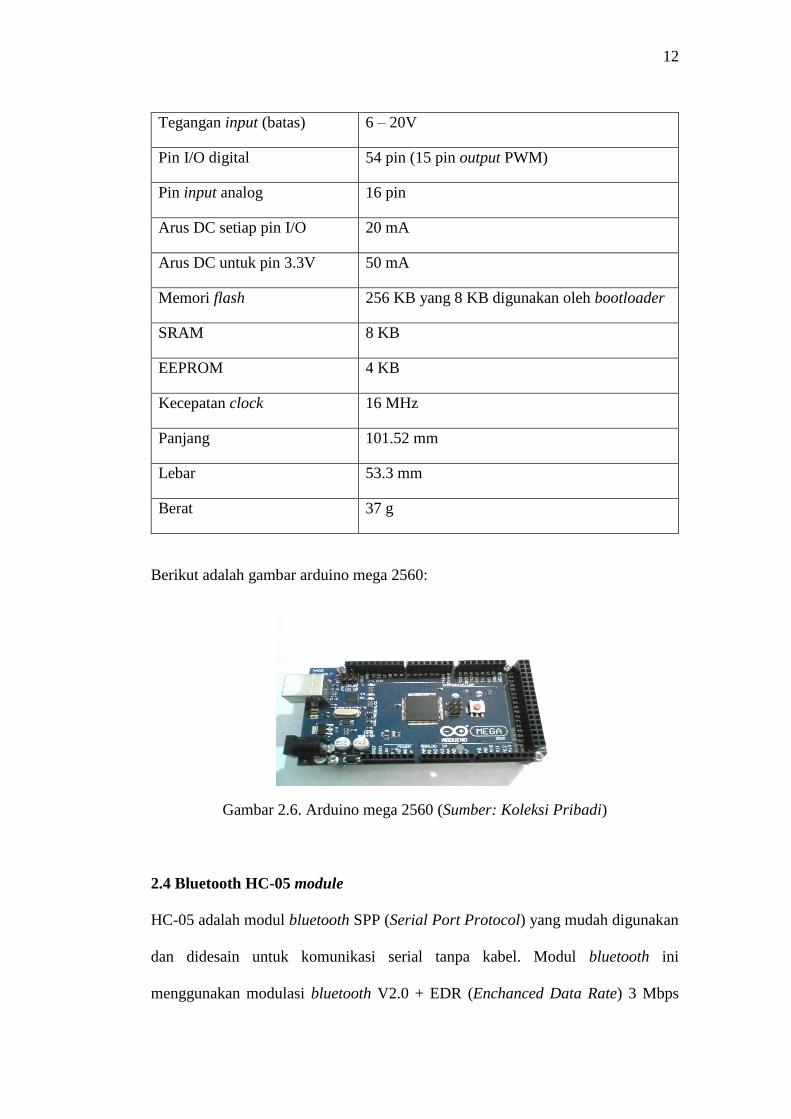
11
adalah ilustrasi struktur motor stepper sederhana dan pulsa yang dibutuhkan untuk
menggerakkannya:
(a) (b)
Gambar 2.5. (a) bentuk pulsa keluaran dari pengendali motor stepper (b) penerapan
pulsa pengendali pada motor stepper dan arah putaran yang bersesuaian[3]
2.3 Arduino Mega 2560
Arduino adalah open-source project yang awalnya dikembangkan di Interaction
Design Institute Ivera, di Italia utaraoleh Massimo Banzi, David Cuartielles, Tom
Igoe, Gianluca Martino, dan David Mellis. Arduino mega 2560 adalah modul
mikrokontroler yang menggunakan ATmega 2560. Berikut adalah spesifikasi dari
Arduino mega 2560:
Tabel 2.1 Spesifikasi Arduino mega 2560
Mikrokontroler ATmega 2560
Tegangan kerja 5V
Tegangan input (disarankan) 7 – 12V
12
Tegangan input (batas) 6 – 20V
Pin I/O digital 54 pin (15 pin output PWM)
Pin input analog 16 pin
Arus DC setiap pin I/O 20 mA
Arus DC untuk pin 3.3V 50 mA
Memori flash 256 KB yang 8 KB digunakan oleh bootloader
SRAM 8 KB
EEPROM 4 KB
Kecepatan clock 16 MHz
Panjang 101.52 mm
Lebar 53.3 mm
Berat 37 g
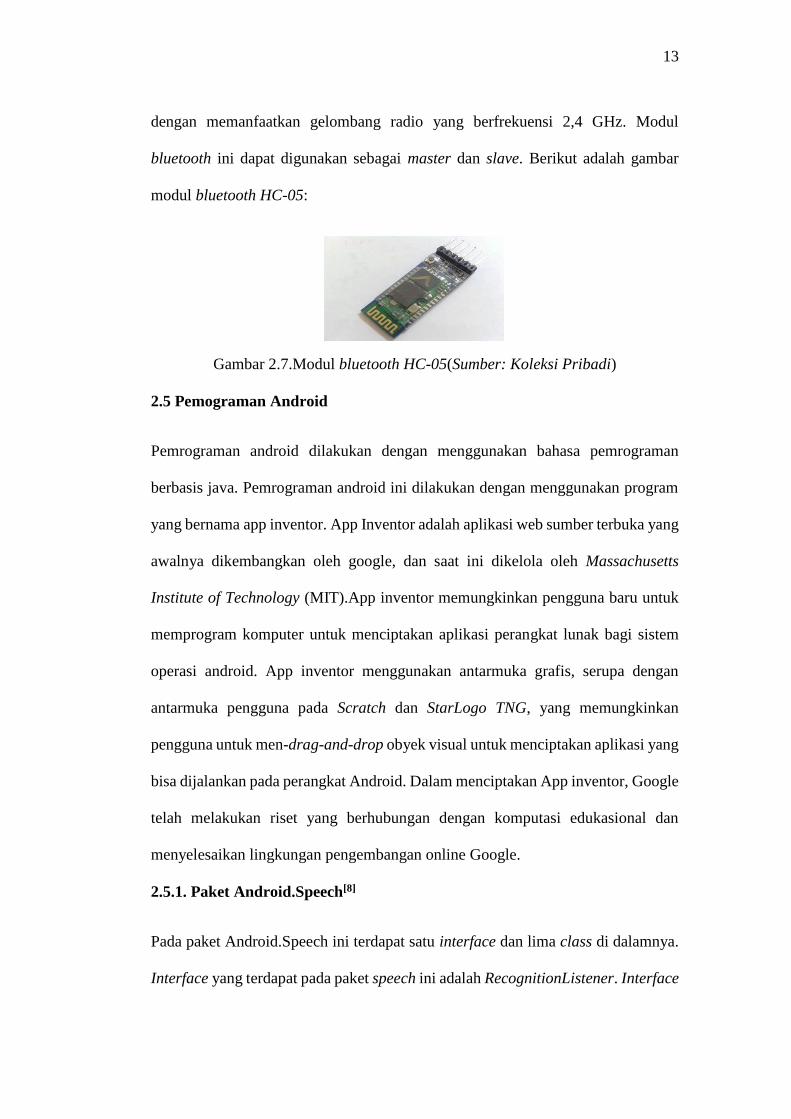
Berikut adalah gambar arduino mega 2560:
Gambar 2.6. Arduino mega 2560 (Sumber: Koleksi Pribadi)
2.4 Bluetooth HC-05 module
HC-05 adalah modul bluetooth SPP (Serial Port Protocol) yang mudah digunakan
dan didesain untuk komunikasi serial tanpa kabel. Modul bluetooth ini
menggunakan modulasi bluetooth V2.0 + EDR (Enchanced Data Rate) 3 Mbps
13
dengan memanfaatkan gelombang radio yang berfrekuensi 2,4 GHz. Modul
bluetooth ini dapat digunakan sebagai master dan slave. Berikut adalah gambar
modul bluetooth HC-05:
Gambar 2.7.Modul bluetooth HC-05(Sumber: Koleksi Pribadi)
2.5 Pemograman Android
Pemrograman android dilakukan dengan menggunakan bahasa pemrograman
berbasis java. Pemrograman android ini dilakukan dengan menggunakan program
yang bernama app inventor. App Inventor adalah aplikasi web sumber terbuka yang
awalnya dikembangkan oleh google, dan saat ini dikelola oleh Massachusetts
Institute of Technology (MIT).App inventor memungkinkan pengguna baru untuk
memprogram komputer untuk menciptakan aplikasi perangkat lunak bagi sistem
operasi android. App inventor menggunakan antarmuka grafis, serupa dengan
antarmuka pengguna pada Scratch dan StarLogo TNG, yang memungkinkan
pengguna untuk men-drag-and-drop obyek visual untuk menciptakan aplikasi yang
bisa dijalankan pada perangkat Android. Dalam menciptakan App inventor, Google
telah melakukan riset yang berhubungan dengan komputasi edukasional dan
menyelesaikan lingkungan pengembangan online Google.
2.5.1. Paket Android.Speech[8]
Pada paket Android.Speech ini terdapat satu interface dan lima class di dalamnya.
Interface yang terdapat pada paket speech ini adalah RecognitionListener. Interface
14
RecognitionListener ini digunakan untuk menerima notifikasi dari
SpeechRecognizer selama proses pengenalan berjalan. Semua panggilan balik akan
dieksekusi pada thread aplikasi utama. Pada interface RecognitionListener ini
terdapat public method yaitu:
a. onBeginningOfSpeech(), digunakan ketika memulai berbicara.
b. onBufferReceived(byte[] buffer), tujuan dari fungsi ini adalah untuk
memberikan umpan balik kepada pengguna mengenai audio yang ditangkap.
c. OnEndOfSpeech(), digunakan ketika setelah pengguna berhenti berbicara.
d. onError(), terjadi ketika ada kesalahan pada jaringan dan pengenalan.
e. onPartialResult(), digunakan ketika sebagian pengenalan dapat digunakan.
f. onReadyForSpeech(), digunakan ketika titik terakhir telah siap untuk
memulai berbicara.
g. onResult(), digunakan ketika hasil pengenalan telah didapatkan.
Selain interface, pada paket ini juga terdapat class yang digunakan, antara lain:
a. RecognitionService, class ini memberikan sebuah class dasar untuk
mengimplementasikan layanan pengenalan.
b. RecognitionService.Callback, class ini menerima panggilan balik dari
layanan pengenalan suara dan diteruskan ke pengguna.
c. RecognizerIntent, konstanta untuk mendukung pengenalan ucapan dengan
memulai sebuah intent.
d. RecognizerResultIntent, konstanta untuk menguhubungkan intent dengan
hasil pengenlan ucapan.

15
e. SpeechRecognizer, class ini memberikan akses kepada layanan pengenalan
ucapan.
2.5.2. Paket Bluetooth Android[8]
Platform android terdapat sebuah stack bluetooth yang memungkikan
pengguna untuk bertukar data dengan perangkat bluetooth lainnya secara
nirkabel. Kerangka aplikasi ini memberikan akses fungsi bluetooth ini melalui
APIs bluetooth android. API ini memungkinkan aplikasi nirkabel terhubung
dengan perangkat bluetooth lainnya, yang bisa akses point-to-point ataupun
multipoint.
Dengan menggunakan API bluetooth ini, sebuah android dapat melakukan
beberapa hal, antara lain:
- Memindai perangkat bluetooth lainnya
- Meng-query perangkat bluetooth lainnya untuk memasangkan perangkat
- Membuat sambungan RFCOMM
- Membangun sebuah sambungan dengan menggunakan pencarian layanan
pencarian.
- Mengirimkan data dari dan ke perangkat lainnya
- Mengatur banyak koneksi
Dari semua API bluetooth ini dapat ditemukan dalam paket android.bluetooth.
Berikut ini akan dijelaskan class dan interface yang akan dibutukan untuh
membuat sebuah komunikasi bluetooth.
a. Bluetooth Adapter
Mempresentasikan adapter bluetooth lokal yang ada (bluetooth radio). Dengan
menggunakan BluetoothAdapter ini, aplikasi dapat mencari perangkat
16
bluetooth lainnya, meng-query daftar perangkat yang terhubung, memberikan
sebuah BluetoothDevice cara mengetahui MAC address dan membuat sebuah
BluetoothServerSocket untuk berkomunikasi dengan perngkatlainnya.
b. Bluetooth Device
BluetoothDevice ini digunakan untuk meminta sebuah sambungan dengan
perangkat kontrol melalui sebuah BluetoothSocket atau informasi query
tentang perangkat seperti nama, alamat, class, dan bonding state.
c. Bluetooth Socket
Memberikan antarmuka untuk sebuah socket bluetooth. Point sambungan ini
memungkinkan sebuah aplikasi untuk mengubah data dengan perangkat
lainnya melalui output Stream dan input Stream.
d. Bluetooth Server Socket
Memberikan sebuah open server socket untuk melihat permintaan yang masuk.
Dalam menghubungkan dua buah perangkat android, salah satu dari perangkat
harus membuka server socket dengan menggunakan class ini.
e. Bluetooth Class
Mendeskripsikan karakteristik umum dan kapabilitas dari perangkat bluetooth.
f. Bluetooth Profile
Sebuah antarmuka yang mendefinisikan profil bluetooth.
g. BluetoothHeadset
Memberikan dukungan headset bluetooth untuk digunakan oleh handphone.
h. Bluetooth A2dp
Menjelaskan bagaimana suara dengan kualitas tinggi dapat dikirimkan dari satu
perngakat ke perangkat lainnya melalui sambungan bluetooth.
17
i. Bluetooth Health
Mereprsentasikan sebuah proxy profil kesehatan perangkat yang mengontrol
layanan bluetooth.
j. Bluetooth Health Callback
Sebuah class abstrak yang digunakan mengimplementasikan panggilan balik
Bluetooth health.
k. Bluetooth Health AppConfiguration
Merepresentasikan konfigurasi aplikasi bluetooth health thrid-party register
aplikasi untuk berkomunikasi dengan perangkat kontrol health bluetooth.
l. BluetoothProfile.ServiceListener
Sebuah antarmuka dimana pemberitahuan profil bluetooth client profil pada
saat terhubung atau tidak dengan layanan.
2.5.2.1. Bluetooth Permission
Dalam menggunakan fitur bluetooth pada aplikasi, aplikasi harus medeklarasikan
bluetooth permission ini. Aplikasi memperlukan izin untuk menampilkan
komunikasi bluetooth, seperti meminta sebuah sambungan, menerima sebuah
sambungan, dan transfer data.
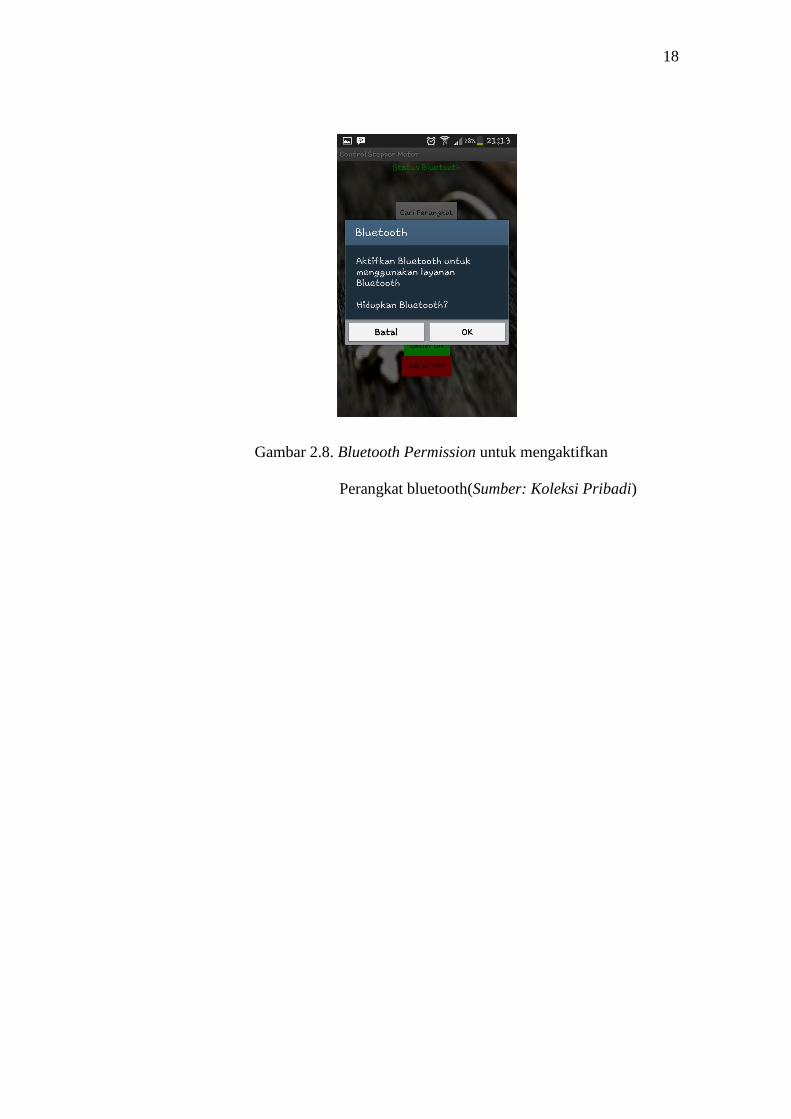
18
Gambar 2.8. Bluetooth Permission untuk mengaktifkan
Perangkat bluetooth(Sumber: Koleksi Pribadi)
III. METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
Perancangan dan penelitian ini akan dilakukan pada laboratorium terpadu teknik
elektro universitas lampung. Sedangkan waktu pelaksanaan penelitian di
estimasikan berlangsung mulai dari bulan Februari 2016 hingga Juli tahun 2016.
3.2. Alat dan Bahan
Dalam melaksanakan penilitian ini alat yang digunakan antara lain:
1. Komputer (PC)
2. Solder
3. Timah
4. PCB board
5. Multimeter
6. Bor PCB
7. Kabel
8. Cairan Feritclorite
Selain alat-alat diatas, penulis juga menggunakan komponen-komponen utama
yaitu:
1. Motor stepper Sunchor Nema 17
2. Driver motor stepper
20
3. Arduino Mega2560
4. Modul Bluetooth HC-05
5. Gear motor stepper
6. Prototype Kunci pintu Bergerigi
3.3. Metode Penelitian
Dalam menyelesaikan tugas akhir ini, metode penelitian yang di gunakan memiliki
4 tahapan penelitian yaitu:
3.3.1 Studi Literatur
Pada tahap ini dilakukan pengumpulan referensi sebagai dasar penentuan konsep
penelitian yang akan dilakukan. Referensi yang diperlukan berupa datasheet
maupun prinsip kerja dari komponen yang akan digunakan. Dari referensi yang
didapat ini juga digunakan untuk menyusun sebuah landasan teori dari penelitian
ini.
3.3.2 Perancangan Alat dan Sistem
Setelah dilakukannya pengumpulan referensi dan data, tahap selanjutnya yang
dilakukan adalah perancangan alat. Pada tahap ini akan dikelompokan menjadi 3
langkah yaitu penentuan komponen, perancangan hardware dan yang terakhir
adalah perancangan software.
a. Penentuan komponen
Penentuan komponen ini dilakukan berdasarkan referensi yang telah didapat
sebelumnya. Dimana akan ditentukan komponen apa saja yang akan diperlukan
dalan perancangan alat. Ada beberapa hal yang diperhatikan dari komponen
yang akan dipakai seperti prinsip kerja alat dan datasheet. Dengan mengetahui
21
prinsip kerja akan dapat mencocokkan apakah komponen terebut cocok dengan
konsep yang dibuat. Sedangkan datasheet diperlukan dalam penentuan
parameter-parameter dari komponen tersebut.
b. Perancangan Hardware
Tahap perancangan hardware adalah tahap perakitan dari komponen-komponen
yang ada sesuai konsep yang telah ditentukan. Hal pertama yang dilakukan
adalah dengan merancang rangkaian penelitian pada sebuah project board
terlebih dahulu. Hal ini dilakukan untuk mempermudah bongkar pasang
rangkaian pada saat pengujian alat. Setelah dilakukannya pengujian dan
dinyatakan berhasil maka selanjutnya akan dilakukan perancangan hardware
tahap akhir.
c. Perancangan Aplikasi pada Android
Setelah perancangan hardware ini maka tahap selanjutnya adalah perancangan
software dalam bentuk aplikasi. Perancangan software yang pertama adalah
perancangan sistem voice recognition. Aplikasi voice recognition yang dibuat
menggunakan fitur app inventor Sehingga aplikasi ini menggunakan database
yang disediakan oleh google voice. Dengan digunakannnya database ini, maka
pengenalan suara lebih mudah terbaca oleh datasheet yang tersimpan di google
voice.
d. Perancangan Program pada Mikrokontroler Arduino
Dalam perancangan ini menggunakan software Arduino IDE. Software ini
bekerja dengan berbasiskan pemrograman bahasa C. pemrograman dilakukan
dengan mengetikkan kode program berupa instruksi-instruksi yang akan
22
mengaktifkan pin pin yang terdapat pada mikrokontroler. Ketika melakukan
konfigurasi koneksi terhadap perangkat bluetooth, perlu dipastikan perangkat
dalam keadaan aktif dan tidak terkoneksi dengan perangkat nirkabel
lainnya.Untuk mengatur koneksi terhadap bluetooth, konfigurasi default
bluetooth yang digunakan yaitu:
Baudrate: 9600 bps
Nama: Guntur
Pairing kode: 4321
konfigurasi tersebut dapat diatur melalui serial monitor pada arduino IDE. Untuk
menguji koneksi arduino terhadap bluetooth dengan mengirimkan perintah “AT”
dan jika berhasil maka Bluetooth akan menjawab “OK”.
Untuk mengatur konfigurasi baudrate yaitu dengan mengirimkan perintah
“AT+BAUD(no.kode)”. jika bluetooth terhubung maka bluetooth akan
menjawab “OK”. Untuk mengatur konfigurasi nama maka dapat kita ubah
dengan mengirimkan perintah “AT+NAME(nama yang diinginkan)”. Jika
berhasil maka Bluetooth akan menjawab “OKsetname”. Sedangkan untuk
mengatur konfigurasi kode pin kita dapat mengubahnya dengan mengirimkan
perintah "AT+PIN(kode)” dan jika berhasil maka bluetooth akan menjawab
“OKsetPIN”. Contoh perintah konfigurasi:
AT+BAUD4
AT+NAMEcharlie
AT+PIN111210
Setiap perubahan diatas akan berlaku segera setelah perintah dikirim. Adapun
indeks yang digunakan untuk mengatur baudrate:
23
1 :1200bps
2 :2400bps
3 :4800bps
4 :9600bps
5 :19200bps
6 :38400bps
7 :57600bps
8 :115200bps
9 :230400bps
A :460800bps
B :921600bps
C :1382400bps
24
Start
Kondisi = 0
Bluetooth data
Bluetooth
menerima
data
Baca data
bluetooth
Y
T
Bluetooth
data = 1
Kondisi
=1 atau
kondisi =2
“Pintu terbuka 1,
coba lagi membuka
dengan buka 1”
Buka
1
Kondisi = Kondisi - 1
Y Y
T T
“Pintu Sudah
Terbuka “
Bluetooth
data = 2 Kondisi
= 2
Y Y “Sudah terbuka
silahkan kunci jika
ingin pergi”
Buka
2
Kondisi
= 1
“Pintu sudah
terbuka”
“Pintu terbuka 1,
coba lagi membuka
dengan buka 1”
T
T
Y
Kondisi = Kondisi - 2
1 2
25
2 1
Bluetooth
data = 8 Kondisi
=0 atau
kondisi =1
“Pintu terkunci 1
kali”
Tutu
p 1
Kondisi = Kondisi + 1
Kondisi = Kondisi + 1
“Pintu Sudah
Terkunci “
Y Y
T
Bluetooth
data = 9
T
Y
Kondisi = Kondisi + 2
Kondisi
= 0 “Sudah terkunci” Tutu
p 2
Kondisi
= 1
“Pintu Sudah
terkunci”
Y
T
“Pintu sudah
terkunci 1, coba
lagi dengan
mengunci 1”
Kondisi = Kondisi + 2
T
Y
Bluetooth
data = 3
Nyalakan Relay 01 pada
Power Supply
Y
Kondisi = Kondisi + 2
1
Bluetooth
data = 4
T
Kondisi = Kondisi + 2
Matikan Relay 01 pada
Power Supply
Y
Kondisi = Kondisi + 2
2
26
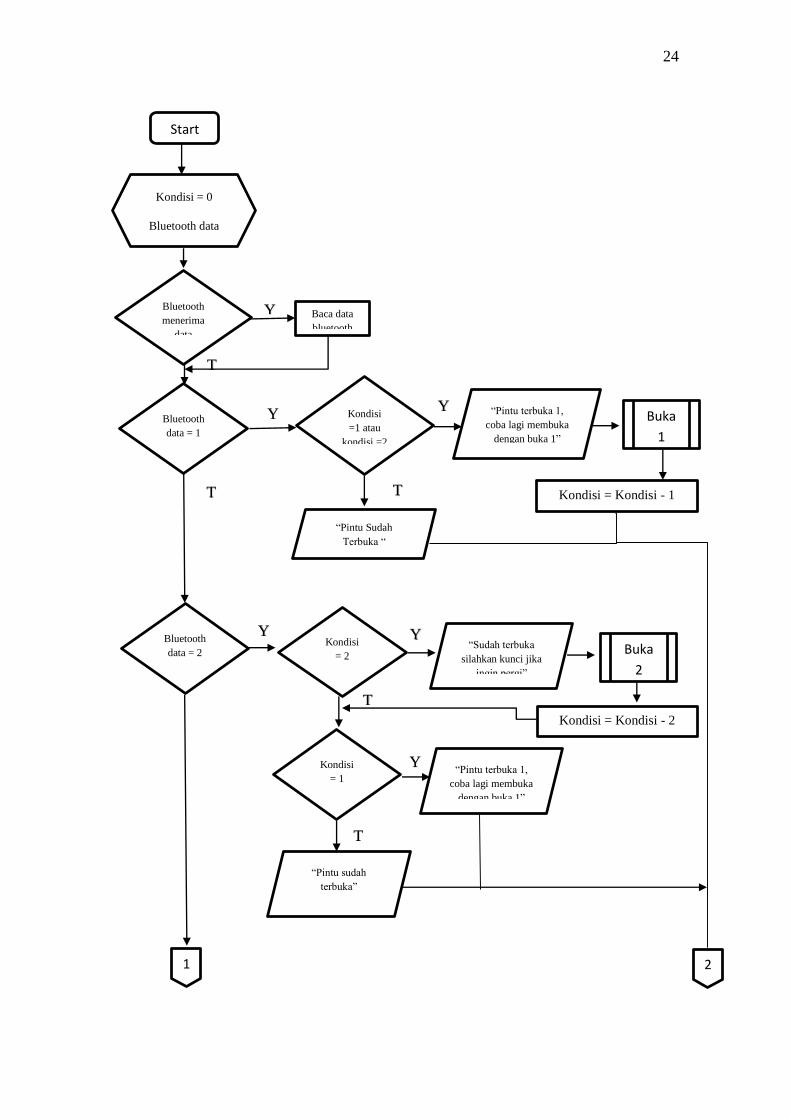
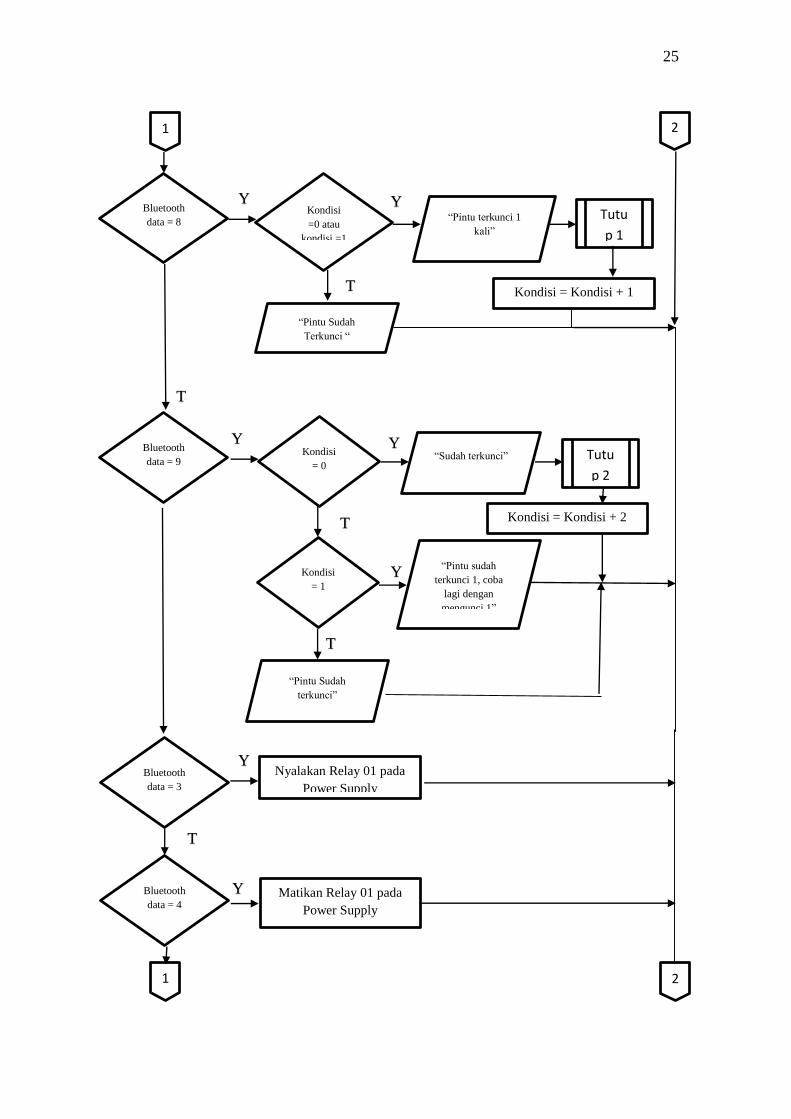
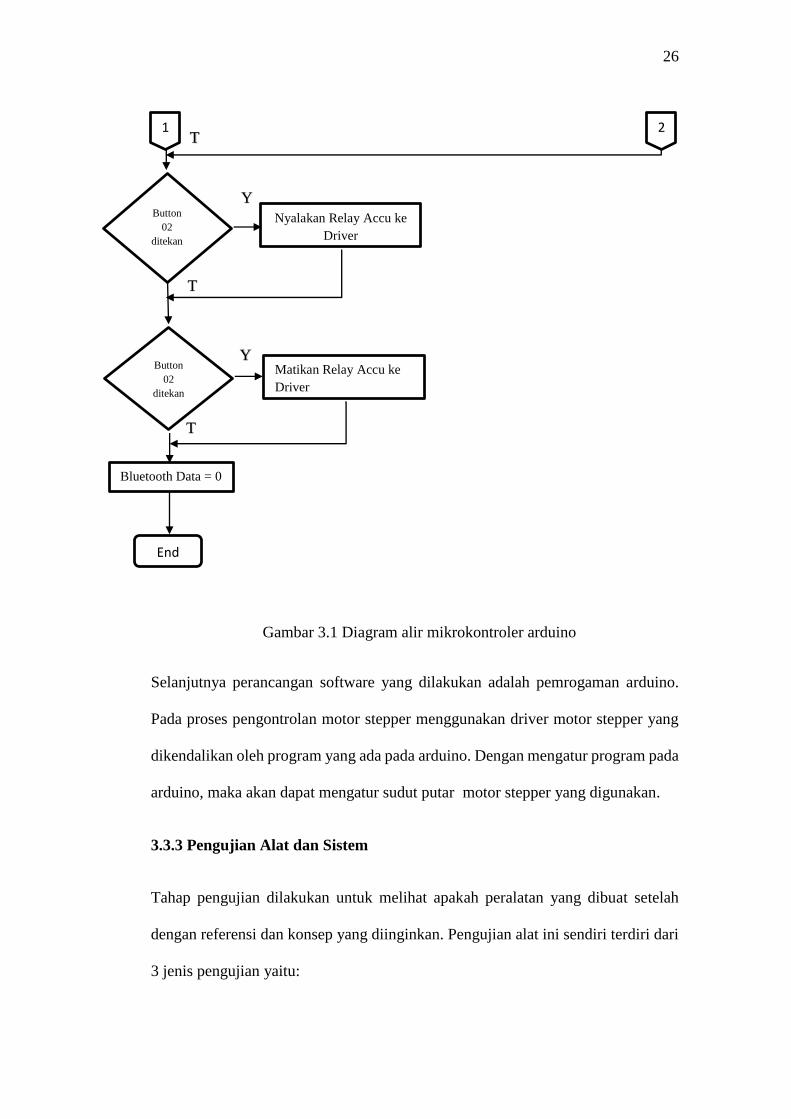
Gambar 3.1 Diagram alir mikrokontroler arduino
Selanjutnya perancangan software yang dilakukan adalah pemrogaman arduino.
Pada proses pengontrolan motor stepper menggunakan driver motor stepper yang
dikendalikan oleh program yang ada pada arduino. Dengan mengatur program pada
arduino, maka akan dapat mengatur sudut putar motor stepper yang digunakan.
3.3.3 Pengujian Alat dan Sistem
Tahap pengujian dilakukan untuk melihat apakah peralatan yang dibuat setelah
dengan referensi dan konsep yang diinginkan. Pengujian alat ini sendiri terdiri dari
3 jenis pengujian yaitu:
2 1 T
Kondisi = Kondisi + 2
Button
02
ditekan
Nyalakan Relay Accu ke
Driver
Button
02
ditekan
Matikan Relay Accu ke
Driver
Bluetooth Data = 0
End
Y
Kondisi = Kondisi + 2
T
Kondisi = Kondisi + 2
Kondisi = Kondisi + 2
T
Kondisi = Kondisi + 2
Kondisi = Kondisi + 2
Y
Kondisi = Kondisi + 2
Kondisi = Kondisi + 2
27
a. Pengujian Pengenalan Suara
Pengujian pengenalan suara dilakukan dengan melihat hasil pencocokan dari
motor stepper dengan suara pemakai melalui bluetooth. Dimana dengan
mencocokkan suara memakai software voice recognition Dari hasil suara itu
yang akan mengetahui pengenalan suara pada sofware tersebut behasil atau
tidak.
b. Pengujian Arduino
Pada tahap ini dilakukan sebuah pegujian dari penggunaan bahasa arduino
yang akan dihubungkan dengan easy driver motor stepper. Dimana arduino
ini yang akan dijadikan sebagai trigger untuk easy driver motor stepper dapat
menggerakan motor stepper .Sehingga pintu yang terkopel dengan motor
stepper akan bergerak sesuai perintah pengguna.
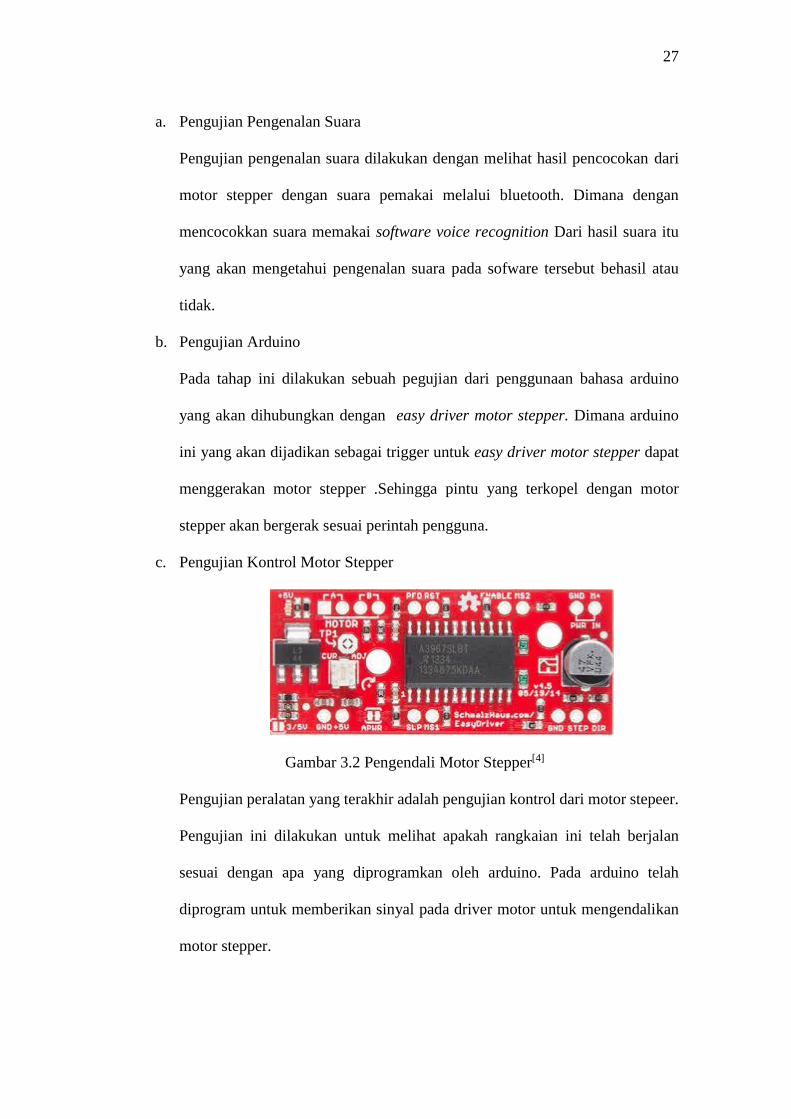
c. Pengujian Kontrol Motor Stepper
Gambar 3.2 Pengendali Motor Stepper[4]
Pengujian peralatan yang terakhir adalah pengujian kontrol dari motor stepeer.
Pengujian ini dilakukan untuk melihat apakah rangkaian ini telah berjalan
sesuai dengan apa yang diprogramkan oleh arduino. Pada arduino telah
diprogram untuk memberikan sinyal pada driver motor untuk mengendalikan
motor stepper.
28
3.3.4 Analisa Sistem
Analisis sistem dapat didefinisikan sebagai penguraian suatu sistem yang utuh
kedalam bagian-bagian komponennya dengan maksud untuk mengidentifikasi dan
mengevaluasi permasalahan-permasalahan, hambatan yang terjadi dan kebutuhan-
kebutuhan yang diharapkan sehingga dapat diusulkan perbaikan-perbaikannya.
Dalam penelitian kali ini analisa sistem yang dilakukan terdiri dari tahap-tahap
berikut ini :
a. Deskripsi umum sistem
Perancangan peralatan yang dilakukan ini memiliki sebuah sistem
pengendalian sudut putar motor stepper menggunakan perintah suara dari
penggunanya. Untuk melakukan pemrosesan suara ini, yaitu menggunakan
sistem berbasis voice recognition pada android untuk melakukan pemrosesan
perintah suara tersebut. Sistem ini akan mencocokan suara pada database voice
recognition android dengan data base yang dimiliki google voice. Setelah
melakukan pencocokan suara, hasil dari pencocokan suara ini akan dikirimkan
ke arduino dalam bentuk sinyal. Selanjutnya arduino akan menerima perintah
tersebut dan memproses sesuai perintah yang telah diprogram ke dalam
arduino. Dari perintah yang diterima itu arduino akan mengeluarkan sinyal
untuk mengontrol driver motor stepper. Kemudian driver motor stepper
tersebut akan memutar motor stepper sesuai perintah arduino.

29
Deskripsi sistem secara umum dapat dilihat pada diagram berikut ini,
Gambar 3.3 Blok Diagram Perancangan Alat
b. Analisa Sistem voice recognition
Aplikasi yang dirancang adalah sebuah software voice recognition. Dimana
dengan menggunakan software ini akan dapat melakukan perintah dengan
mengucapkan kata. Kemudian bluetooth meneruskan kata dari hasil software
tersebut yang terhubung dengan sistem arduino.Sehingga perintah yang
diucapkan akan dikirimkan ke bagian yang selanjutnya akan diproses oleh
arduino. Deskripsi sistem secara umum dapat dilihat pada diagram berikut ini,
30
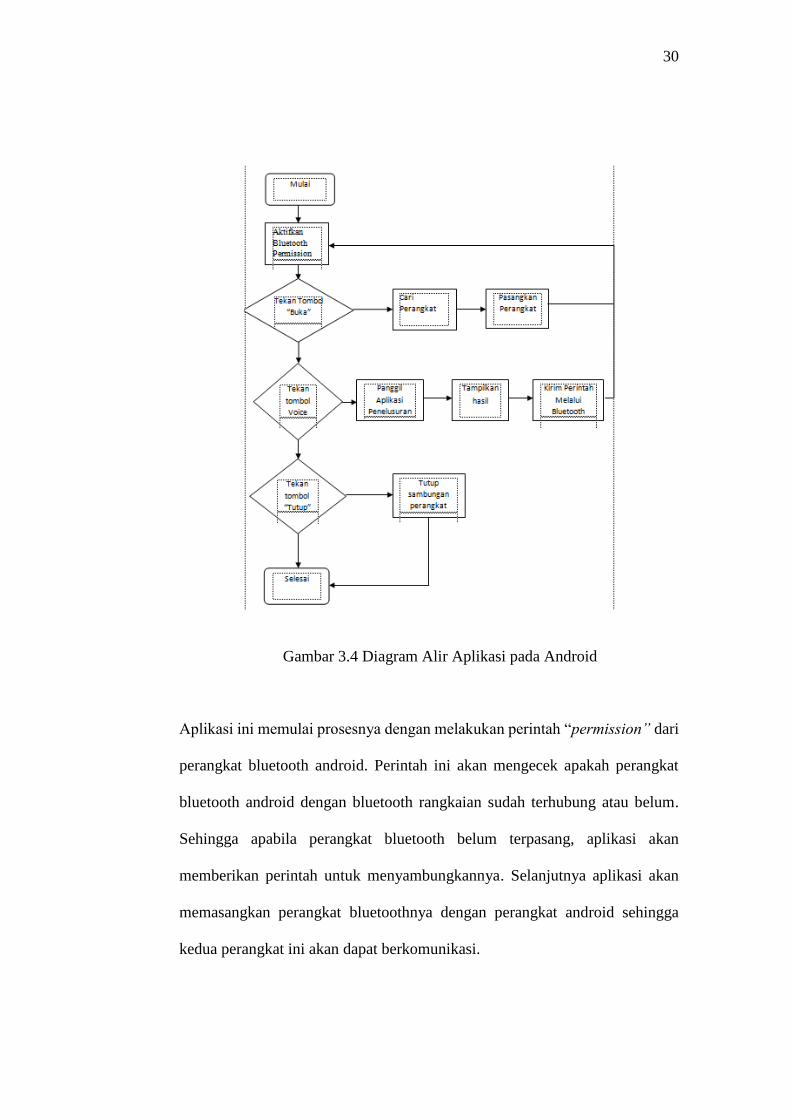
Gambar 3.4 Diagram Alir Aplikasi pada Android
Aplikasi ini memulai prosesnya dengan melakukan perintah “permission” dari
perangkat bluetooth android. Perintah ini akan mengecek apakah perangkat
bluetooth android dengan bluetooth rangkaian sudah terhubung atau belum.
Sehingga apabila perangkat bluetooth belum terpasang, aplikasi akan
memberikan perintah untuk menyambungkannya. Selanjutnya aplikasi akan
memasangkan perangkat bluetoothnya dengan perangkat android sehingga
kedua perangkat ini akan dapat berkomunikasi.
31
Proses selanjutnya adalah pencocokan kata, pengguna akan mengucapkan
sebuah kata sebagai perintah dan selanjutnya aplikasi pada android akan
mencocokkan suara kata tersebut dengan database. Database yang digunakan
pada aplikasi ini adalah database dari google voice. Setelah didapatkan hasil
dari pencocokan suara, aplikasi akan mengirimkan kata yang diucapkan
melalui bluetooth ke arduino. Suara inilah yang akan diproses oleh
mikrokontroler lebih lanjut untuk mengendalikan sudut putar motor stepper.
Flowchart dari aplikasi android ini dapat dilihat dari gambar 3.4
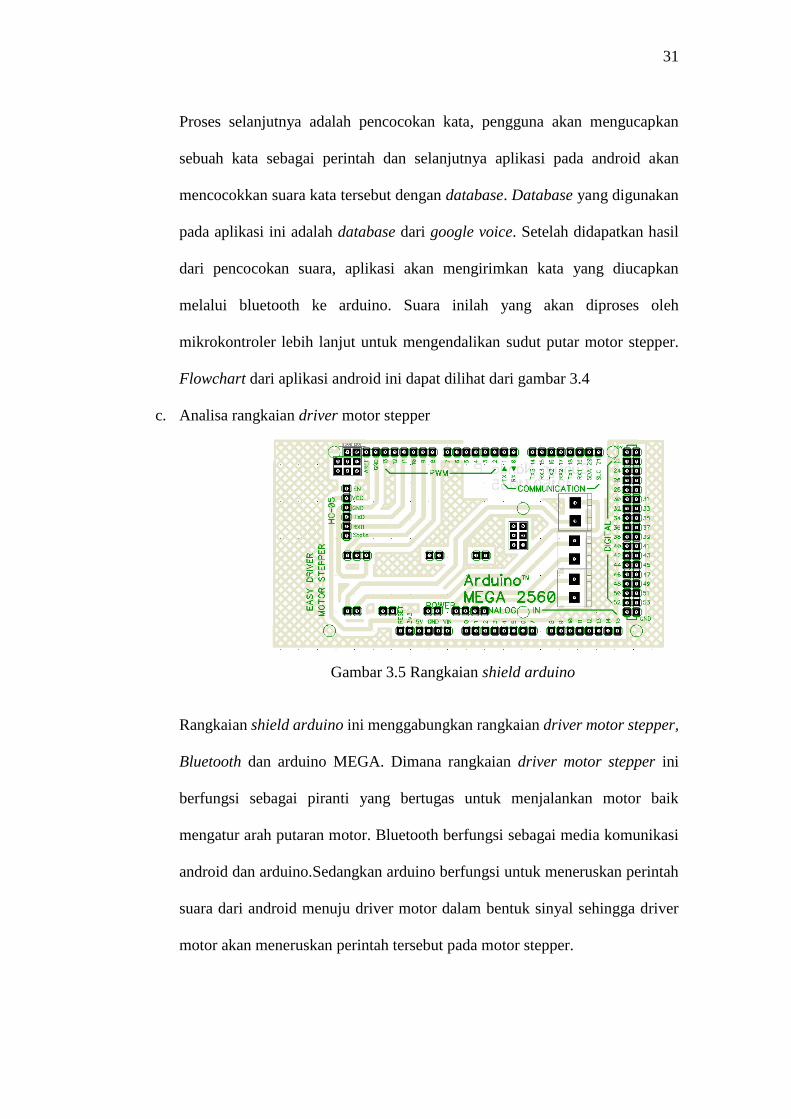
c. Analisa rangkaian driver motor stepper
Gambar 3.5 Rangkaian shield arduino
Rangkaian shield arduino ini menggabungkan rangkaian driver motor stepper,
Bluetooth dan arduino MEGA. Dimana rangkaian driver motor stepper ini
berfungsi sebagai piranti yang bertugas untuk menjalankan motor baik
mengatur arah putaran motor. Bluetooth berfungsi sebagai media komunikasi
android dan arduino.Sedangkan arduino berfungsi untuk meneruskan perintah
suara dari android menuju driver motor dalam bentuk sinyal sehingga driver
motor akan meneruskan perintah tersebut pada motor stepper.
32
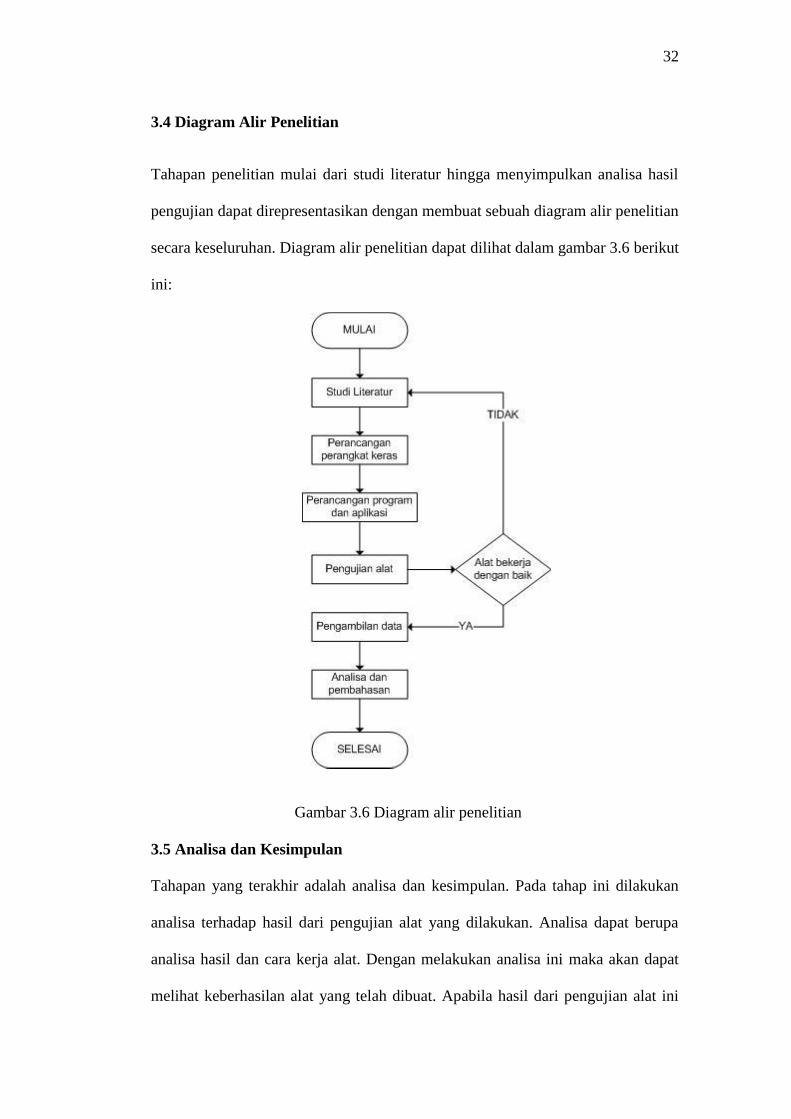
3.4 Diagram Alir Penelitian
Tahapan penelitian mulai dari studi literatur hingga menyimpulkan analisa hasil
pengujian dapat direpresentasikan dengan membuat sebuah diagram alir penelitian
secara keseluruhan. Diagram alir penelitian dapat dilihat dalam gambar 3.6 berikut
ini:
Gambar 3.6 Diagram alir penelitian
3.5 Analisa dan Kesimpulan
Tahapan yang terakhir adalah analisa dan kesimpulan. Pada tahap ini dilakukan
analisa terhadap hasil dari pengujian alat yang dilakukan. Analisa dapat berupa
analisa hasil dan cara kerja alat. Dengan melakukan analisa ini maka akan dapat
melihat keberhasilan alat yang telah dibuat. Apabila hasil dari pengujian alat ini

33
belum sempurna maka penelitian akan kembali pada tahap perancangan alat. Selain
melakukan analisa, pada tahap ini juga dilakukan perhitungan nilai-nilai yang
didapat dari pengujian. Perhitungan dilakukan secara manual berdasarkan rumusan
dari referensi yang ada. Hasil yang didapat dari perhitugan ini juga akan dianalisa
kembali. Sehingga hasil dari analisa dan perhitungan didapatkan kesimpulan dan
saran pada penelitian ini.
V. KESIMPULAN
5.1 Kesimpulan
Dari perancangan dan pembuatan prototipe kunci pintu menggunakan motor
stepper berbasis arduino mega 2560 dengan perintah suara pada android dapat
ditarik kesimpulan:
1. Prototipe kunci pintu dengan kendali suara berbasis arduino mega 2560 dengan
perintah suara pada android bekerja dengan range waktu selama 10-24 detik.
2. Prototipe ini memiliki jarak jangkauan pengendalian menggunakan
smartphone sebesar 7 meter pada kondisi indoor dan 12 meter pada kondisi
outdoor.
3. Pada pengujian motor stepper tegangan yang diperlukan motor saat membuka
kunci sebesar 1.2- 1.4 Volt dan saat mengunci pintu sebesar 1.6-1.8 Volt
sehingga untuk start motor memerlukan waktu yang lebih lama.

63
5.2 Saran
Prototipe kunci pintu menggunakan motor stepper berbasis arduino mega 2560
dengan perintah suara pada android ini, dalam kondisi mengunci atau membuka
kunci pintu telah sesuai dengan perintah yang di ucapkan pada smartphone.
Walaupun berhasil, proses untuk membuka dan mengunci pintu dari start awal
masih lambat, sehingga dibutuhkan penyempurnaan pada coding program arduino
untuk memperbaiki respon alat yang lambat serta penambahan tegangan keluaran
pada driver motor stepper.
DAFTAR PUSTAKA
[1] Maya, Desmira.2015, ”Implementasi Prototype Sistem Kendali Kunci
Pintu Dengan Smartphone Android Berbasis Microcontroller AVR
Atmega 328 Dan Fuzzy Logic”.Universitas Serang Raya.Volume 2,No,1,
http://ejurnal.unsera.ac.id/wp-ontent/uploads/2015/11/desmira_maya.pdf
(Diakses pada 16 Maret 2016)
[2] Undala, Figa.2015,”Prototype Sistem Keamanan Pintu Menggunakan
Radio Frequency Identification (RFID) Dengan Kata Sandi Berbasis
Mikrokontroler”UNTAN.Volume03,No1,http://jurnal.untan.ac.id/index.
php/jcskommipa/article/download/9535/9371.pdf (Diakses pada 16 Maret
2016)
[3] Syahrul, Mei 2011, “Motor Stepper: Teknologi, Metoda Dan Rangkaian
Kontrol”.UNIKOM.Volume6,No,3,http://jurnal.unikom.ac.id/_s/data/jur
nal/v06-n02/vol-6-artikel-7.pdf/pdf/vol-6-artikel-7.pdf (Diakses pada 16
Maret 2016)
[4] Schmalz, Brian.2010.“Easy Driver Stepper v.44”
https://www.sparkfun.com/datasheet/Robotics/A3967.pdf (Di akses pada
16 Maret 2016)
[5] Wahana Komputer.2005.”Electrical Membuat Aplikasi Android Tanpa
Coding Dengan App Inventor”.New Dehli: S. Chand & Company LTD.
[6] ITead Studio.2010.”HC-05: Bluetooth to Serial Port Module”.
http://www.robotshop.com/media/files/pdf/rb-ite-12-bluetooth_hc05.pdf.
(Di akses pada 19 Februari 2016)
[7] Arduino.2015.”Arduino MEGA 2560 &Genuino MEGA
2560”.https://www.arduino.cc/en/Main/ArduinoBoardMega2560#.
(Diaksespada 19 Februari 2016)
[8] DevelopersAndroid.2015.“ConnectivityBluetooth”.
http://developer.android.com/guide/topics/connectivity/bluetooth.html
(Diakses pada 25 Februari 2016)
[9] Susanto Rizky D, “Rancang Bangun Pengendali Kecepatan Putar Dan
Pengereman Motor Dc Menggunakan Perintah Suara Dengan
Memanfaatkan Fitur Speech Recognition Pada Sistem Operasi Android”,
(Skripsi).Universitas Lampung. Bandar Lampung : 2015
[10] Rifqi Muchamad, “Rancang bangun prototipe lift dengan kendali berbasis
mikrokontroler arduino”, (Skripsi). Universitas Lampung.Bandar
Lampung : 2016
[11] El Anwar Yogie, “Prototipe penggerak pintu pagar otomatis berbasis
Arduino Uno Atmega 328P dengan sensor sidik jari”, (Skripsi).Universitas
Lampung. Bandar Lampung : 2014