przegląd struktur i możliwości analogowych układów...
TRANSCRIPT

PUE-w10 1
Przegląd struktur i możliwości analogowych układów programowalnych
wprowadzenie układy EPAC firmy IMP układy ispPAC firmy Lattice układy FPAA firmy Anadigm
struktura i właściwości pierwszych analogowych układów programowalnych EPAC-IMP50E10, -IMP50E30
projektowanie w programie Analog Magic
Wykorzystano materiały firm: IMP, Lattice, Anadigm

PUE-w10 2
Analogowe układy programowalne - wprowadzenie
• Krótka historia - przegląd produktów
• EPAC f-my IMP (International Microelectronics Products) - 1994r
• FPAA f-my Motorola (2-ga połowa lat 90-tych)
• ispPAC f-my Lattice (od 1999 r.)
• AN..., f-my Anadigm (od 2001r.)
• Problemy technologiczne i marketingowe
• Główne obszary zastosowań, perspektywy rozwojowe

PUE-w10 3
Pierwsze analogowe układy programowalne EPAC (IMP)
• Niektóre cechy:
• programowalne w systemie (isp, daisy chain)
• wewnętrzna pamięć nieulotna (EEPROM)
• możliwość zabezpieczenia projektu (Security Bit)
• podgląd sygnałów wewnęrznych (Magic Probe)
• programowalna szybkość/pobór mocy
• Specjalizowane układy scalone:
•EPAC-IMP50E10 (wielokanałowa akwizycja i przetwarzanie danych pomiarowych),
•EPAC -IMP50E30 (układ nadzorująco-diagnostyczny)
• Programowanie połączeń i funkcji bloków wewnętrznych za pośrednictwem programu Analog Magic

PUE-w10 4
Analogowy układ programowalny EPAC-IMP50E10
VSSVDD Probe SLO
SDI
SCLK
SLI
ClkPDbAuxInnAuxInp AuxOut
-+
AuxAmp
Power_Down_Control
G
Clock
N 1
Security
Out3
Out2
OutAmpH
2
0V
15k Hz+
-
OutAmpG
2
0V
15k Hz+
-
Out1
OutAmpF
2
0V
15k Hz+
-
Dac_F
0.0 mV
Dac_H
0.0 mV
Dac_G
0.0 mV
SumAmpE
1+
+
CoreAm pD
1111
+
CoreAm pC
1111
+
InpAm pB
0.515KHz
InpAm pA
0.50.50.50.5
++
Offset
0.0 mV0.0 mV0.0 mV0.0 mV
LPF
1 5kHz 1 5Khz
1 5kHz
1 5kHz
In9p
In9n
InpMux
In1p
In1n
In8n
In8p
D
G/Z

PUE-w10 5
EPAC-IMP50E10 - multiplekser z oknem konfiguracyjnym

PUE-w10 6
EPAC-IMP50E10 - filtry wejściowe
PUE-w10 7
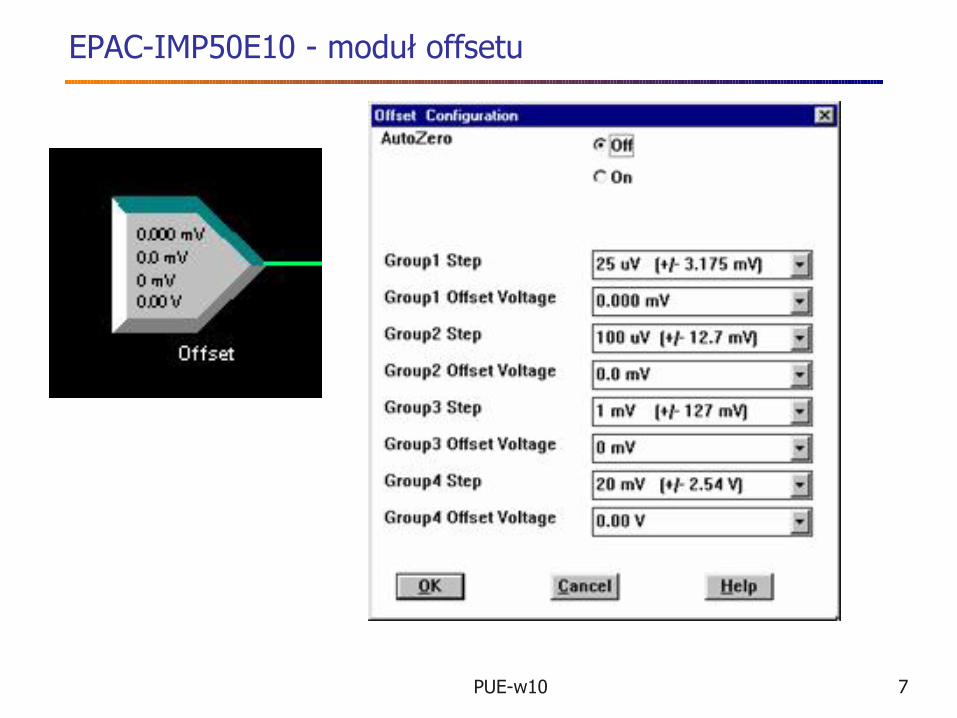
EPAC-IMP50E10 - moduł offsetu
PUE-w10 8
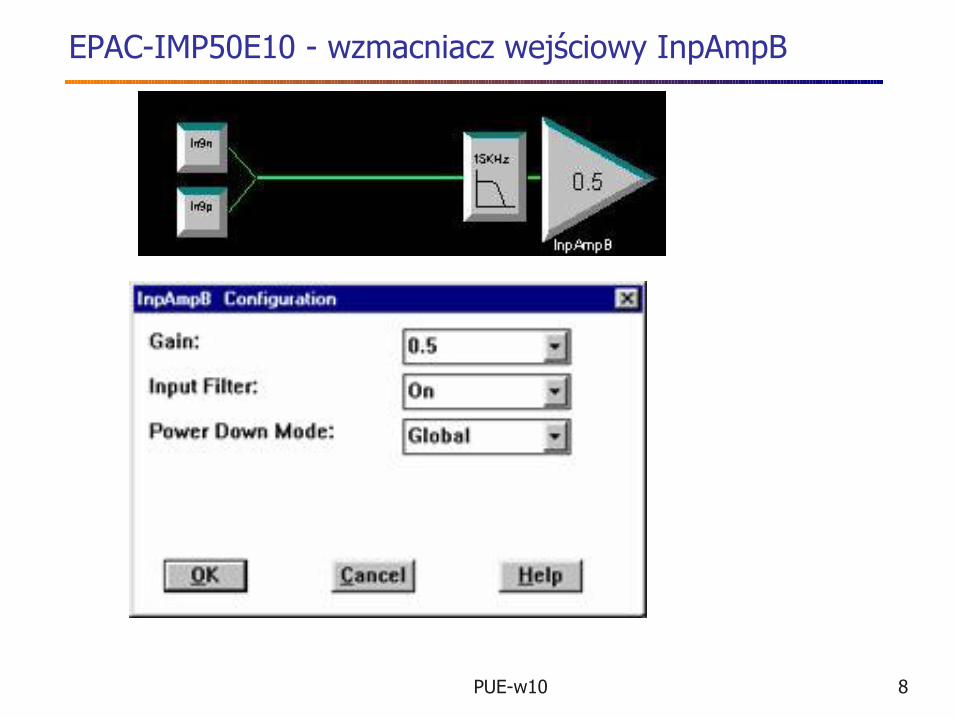
EPAC-IMP50E10 - wzmacniacz wejściowy InpAmpB

PUE-w10 9
EPAC-IMP50E10 - okna dialogowe wzmacniaczy C, E

PUE-w10 10
wzmacniacz F skonfigurowany jako S&H
PUE-w10 11
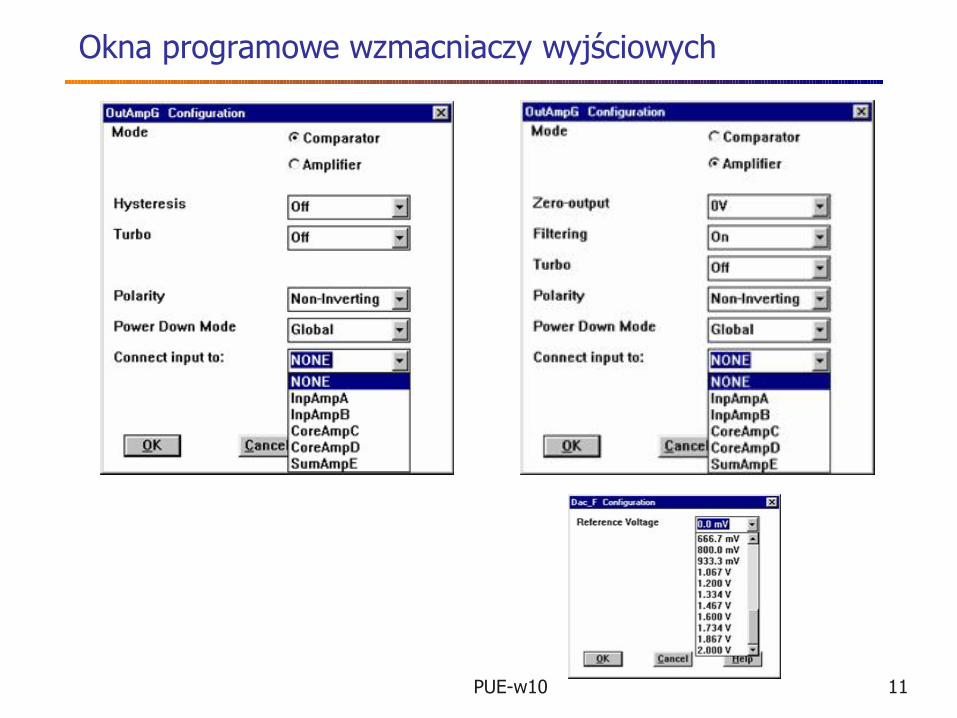
Okna programowe wzmacniaczy wyjściowych

PUE-w10 12
EPAC -IMP50E10 - generator wewnętrzny

PUE-w10 13
EPAC -IMP50E10 - zapezpieczenie dostępu
PUE-w10 14
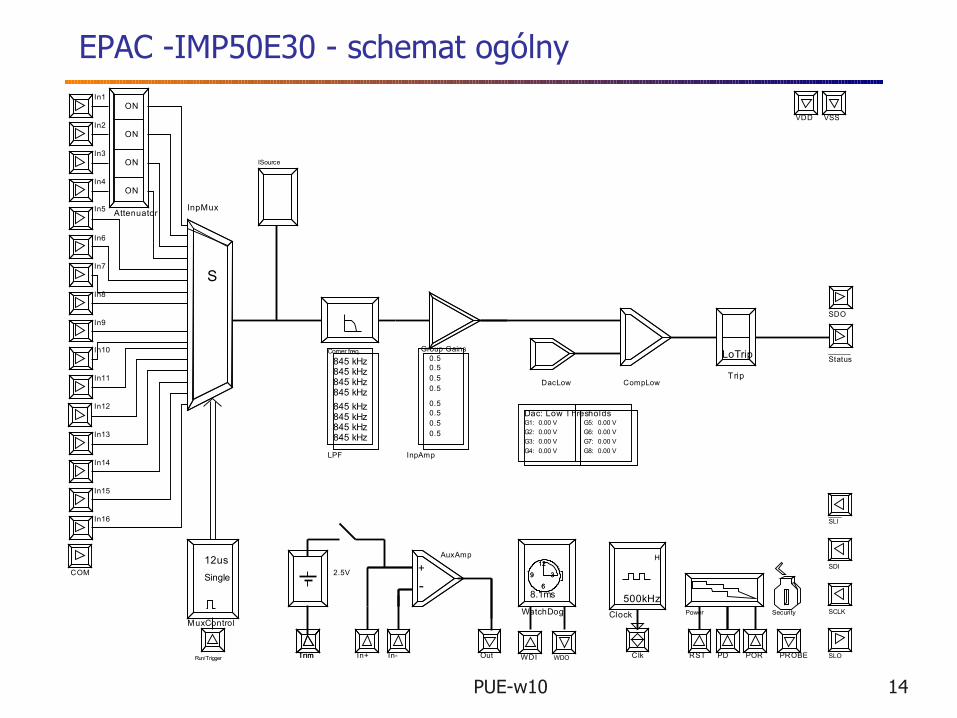
EPAC -IMP50E30 - schemat ogólny
VSSVDD
____POR
____RST PROBE SLO
SLI___
SCLK
SDI
____PD
PowerClock
Clk
500kHz
H
WatchDog
12
39
68.1ms
12
39
6
WDI WDO___
Trim
-+2.5V
In-In+Trim Out
AuxAmp
Security
Trip
_____Status
SDO
LoTrip
Dac: Low Thresholds
CompLowDacLow
G1: 0.00 VG2: 0.00 VG3: 0.00 VG4: 0.00 V
G5: 0.00 VG6: 0.00 VG7: 0.00 VG8: 0.00 V
Group Gains0.5
InpAmp
0.50.50.5
0.50.50.50.5
ISource
LPF
Corner freq.
845 kHz845 kHz845 kHz845 kHz845 kHz845 kHz845 kHz845 kHz
Run/Trigger
MuxControl
SingleCOM12us
Attenuator InpMuxIn5
In2
In1
In6
In10
In9
In8
In7
In4
In3
In12
In11
In14
In13
In16
In15
S
ON
ON
ON
ON

PUE-w10 15
EPAC -IMP50E30 - multiplekser wejściowy

PUE-w10 16
EPAC -IMP50E30 - blok sterowania multipleksera

PUE-w10 17
EPAC -IMP50E30 - wzmacniacz wejściowy
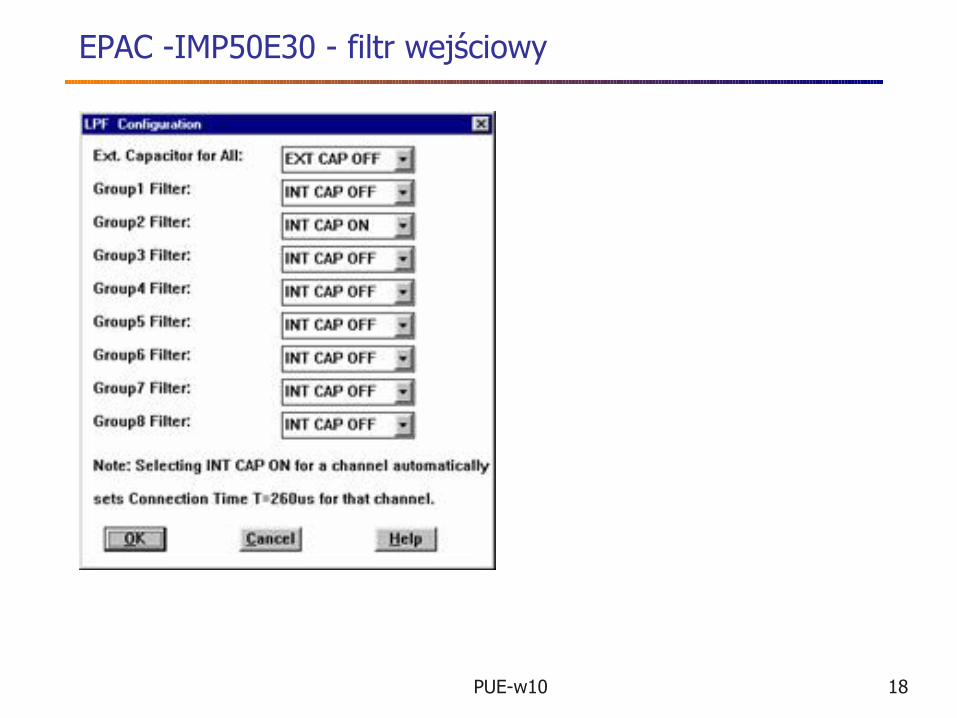
PUE-w10 18
EPAC -IMP50E30 - filtr wejściowy

PUE-w10 19
EPAC -IMP50E30 - komparator z sygn. stanu niskiego

PUE-w10 20
EPAC -IMP50E30 - komparator okienkowy

PUE-w10 21
EPAC -IMP50E30 - przetwornik A/C

PUE-w10 22
EPAC -IMP50E30 - wzmacniacz pomocniczy

PUE-w10 23
EPAC -IMP50E30 - układ taktujący (zegar)

PUE-w10 24
Przykłady zadań realizowanych za pomocą układów EPAC
1. Kondycjonowanie sygnałów z zastosowaniem układu EPAC-IMP50E10
Mikroprocesorowy układ pomiarowo-sterujący ma za zadanie m.in. zbierać sygnały z czterech tensometrycznych mostków pomiarowych MP1..MP4 i sukcesywnie przetwarzać je na postać cyfrową. Mikroprocesor posiada sześć wolnych cyfrowych końcówek wejściowo/wyjściowych oraz jedno 8-bitowe napięciowe wejście analogowe Ain (bez multileksera i bez układu próbkująco-pamiętającego) o zakresie pomiarowym: +0.5V .. +4.5V. Mostki pomiarowe dostarczają sygnałów różnicowych U1..U4, o maksymalnych zakresach zmian podanych w tabeli 1. Napięcie wspólne (nieróżnicowe) mieści się w granicach +2.25V..+2.55V.

PUE-w10 25
Przykłady zadań realizowanych za pomocą układów EPAC
µP (µC)
+5V
U4MP4
MP3
U3
U1MP1
U2MP2
UkMK
EPAC (-50E10)Ain
I/O
µP (µC)
+5V
U4MP4 U4MP4
MP3
U3
U1MP1 U1MP1
U2MP2 U2MP2
UkMK UkMK
EPAC (-50E10)Ain
I/O
1. Kondycjonowanie sygnałów z zastosowaniem układu EPAC-IMP50E10
Mikroprocesorowy układ pomiarowo-sterujący ma za zadanie m.in. zbierać sygnały z czterech tensometrycznych mostków pomiarowych MP1..MP4 i sukcesywnie przetwarzać je na postać cyfrową. Mikroprocesor posiada sześć wolnych cyfrowych końcówek wejściowo -wyjściowych oraz jedno 8-bitowe napięciowe wejście analogowe Ain (bez multileksera i bez układu próbkująco-pamiętającego) o zakresie pomiarowym: +0.5V .. +4.5V.

PUE-w10 26
Przykłady zadań realizowanych za pomocą układów EPAC
Mostki pomiarowe dostarczają sygnałów różnicowych U1..U4, o maksymalnych zakresach zmian podanych w tabeli 1. Napięcie wspólne (nieróżnicowe) mieści się w granicach +2.25V..+2.55V. Sygnały wymagają filtrowania filtrem dolnoprzepustowym 1-go rzędu, o częstotliwości granicznej podanej w tabeli; Należy również przewidzeć możliwość korygowania wzmocnionych i odfiltrowanych napięć pomiarowych przy pomocy wspólnego dla wszystkich kanałów zewnętrznego różnicowego sygnału korygującego Uk. Zmiana Uk o 40mV powinna zmieniać napięcie wyjściowe o 1% zakresu pomiarowego. Dodatkowo wskazana byłaby sygnalizacja przekroczenia 90% zakresu pomiarowego przez którykolwiek z sygnałów wejściowych (wzmocnionych i skorygowanych). Zaprojektować połączenia zewnętrzne i wewnętrzne oraz parametry bloków układu EPAC-IMP50E10.
Parametry mostków pomiarowych MP1 .. MP4 (do przykładu 1 z EPAC 50E10 zes- taw
U1min (mV)
U1max (mV)
fg1 (Hz)
U2min (mV)
U2max (mV)
fg2 (Hz)
U3min (mV)
U3max (mV)
fg3 (Hz)
U4min (mV)
U4max (mV)
fg4 (Hz)
1 0 250 250 -100 100 250 -50 50 250 100 500 250 2 20 220 15000 -400 400 15000 -100 100 15000 0 1000 15000

PUE-w10 27
Przykłady zadań realizowanych za pomocą układów EPAC
2. Nadzorowanie stanu wielu analogowych wejść pomiarowych z zastosowaniem układu EPAC-IMP50E30
Mikroprocesorowy układ pomiarowo-sterujący ma za zadanie m.in. nadzorować sygnały z czterech urządzeń pomiarowych UP1..UP4 i reagować w przypadku, gdy sygnały te nie mieszczą się zadanych granicach. Urządzenia pomiarowe dostarczają sygnałów różnicowych U1..U4, o dopuszczalnych zakresach zmian podanych w tabeli. Urządzenia UP3,UP4 są zasilane napięciem 0V,+5V, a urządzenia UP1,UP2 napięciem -15V, +15V. Sygnały powinny być filtrowane filtrem dolnoprzepustowym 1-go rzędu, o częstotliwości granicznej nie większej niż 16 kHz. Zaprojektować połączenia zewnętrzne i wewnętrzne oraz parametry bloków układu EPAC-IMP50E30 w taki sposób, aby możliwa była sygnalizacja stanu przekroczenia dopuszczalnego zakresu któregokolwiek z sygnałów wejściowych przy pomocy pojedynczej linii logicznej łączącej EPAC z mikrokontrolerem. Ocenić dokładność i parametry czasowe (opóźnienie) z jakimi jest realizowane zadanie sygnalizacji stanu przekroczenia zakresu.

PUE-w10 28
Przykłady zadań realizowanych za pomocą układów EPAC
Dopuszczalne zakresy napięć wyjściowych urządzeń UP1..UP4 zes- taw
U1min (mV)
U1max (mV)
U2min (mV)
U2max (mV)
U3min (mV)
U3max (mV)
U4min (mV)
U4max (mV)
1 1500 2500 3000 5500 200 500 100 900 2 2000 4250 2700 6000 100 800 200 800
Parametry mostków pomiarowych MP1 .. MP4 (do przykładu 1 z EPAC 50E10 zes- taw
U1min (mV)
U1max (mV)
fg1 (Hz)
U2min (mV)
U2max (mV)
fg2 (Hz)
U3min (mV)
U3max (mV)
fg3 (Hz)
U4min (mV)
U4max (mV)
fg4 (Hz)
1 0 250 250 -100 100 250 -50 50 250 100 500 250 2 20 220 15000 -400 400 15000 -100 100 15000 0 1000 15000