pwm controller
DESCRIPTION
Diseño de un circuito para medir RPM’s con sistema de control de lazo cerrado:TRANSCRIPT

Universidad de Puerto Rico en AguadillaDepartamento de Electrónica, Física y Control de Calidad
Diseño de un circuito para medir RPM’s
con sistema de control de lazo cerrado:
Jomel Maldonado Vélez, 802-97-4141
Harvin Batista Molina, 444-06-0888
Principios de Medidas I, TEIN 2001 Sección L31
Presentado a: Prof. Edgardo Desardén
Fecha de entrega: 13 de noviembre de 2009

Introducción
Supongamos que la farmacéutica de C.O.R.A. posee una maquinaria para
separar ciertos tipos de fluidos de un sólido, esto se tiene que hacer mediante el uso de
la fuerza centrípeta que ejerce esta maquinaria sobre el fluido al girar a una revolución
determinada. La farmacéutica se comunica con nosotros al notar que al añadir material
a la maquina, esta no logra calibrarse y no mantiene una revolución constante
determinada. En el momento que se nos informa sobre el defecto nos solicitan un
controlador para esta maquinaria en donde se le asigne una revolución y esta se
calibre constantemente para que se mantenga en esta revolución, adicional a esto se
nos informa que el espacio es limitado por tanto el circuito no debe ocupar mucho
espacio.
Para este proyecto utilizaremos Op-Amps para amplificar la señal del sensor y
controlar el voltaje para regresar a las revoluciones necesarias. Para lograrlo
utilizáremos un sensor de revoluciones óptico el cual envía pulsaciones de voltaje. Este
se conecta a un convertidor de frecuencias a voltaje para luego, mediante Op-amps,
acondicionar la señal de salida y aumentar o reducir el voltaje, del motor que gira la
centrifuga, de ser necesario.

Teoría de Operación
La teoría de control automático es una rama interdisciplinaria de la ingeniería y
las matemáticas que trabaja con el comportamiento de sistemas dinámicos, o bien sea,
sistemas en movimiento. La salida deseada es la referencia. Cuando se requiere que
una o más variables de salidas sigan cierta referencia con respecto al tiempo, se utiliza
un controlador que se encarga de manipular las entradas del sistema para obtener una
salida que corresponda a la referencia.
Este circuito logra controlar las revoluciones de un motor de corriente directa
mediante el uso de modulación por ancho de pulso (PWM). Esto es una técnica donde
se modifica el ciclo de trabajo (Duty Cycle) de una señal periódica para controlar el
voltaje promedio que se envía a una carga resistiva. El ciclo de trabajo de una señal
periódica es el ancho relativo de su parte positiva en relación con su parte negativa.
Ósea, la relación del tiempo que esta encendido vs. el tiempo que está apagado. Por
ejemplo, si tenemos una fuente que esta alternado entre 0 y 12 voltios a un 50% de
Duty Cycle, su voltaje promedio será de 6 voltios.
En el circuito, hay una pareja de LED y fototransistor infrarrojo, las aspas del
abanico interrumpen el paso de luz infrarroja. Estas interrupciones causan unas
pulsaciones de voltaje, los cuales son directamente proporcional a las revoluciones.
Esa señal sale de una forma senosoidal, debido a la curvatura de las aspas, así que se
pasa por un Op-Amp configurado como comparador para convertir la señal a
rectangular.
La señal que sale del Op-Amp comparador pasa a un convertidor de frecuencia
a voltaje (F/V converter). Este lo convierte en un voltaje, lo cual pasa a otro Op-Amp
configurado como buffer para no demandarle corriente al F/V converter.
La salida del buffer pasa por un Op-Amp configurado como Amplificador
Invertidor, el cual tiene una ganancia de Av = 11.11, pero con salida con signo
negativo. Luego pasa por otro Op-Amp configurado como Sumador Invertidor, el cual
se encarga de añadirle .555 voltios al voltaje de salida del Op-Amp anterior y de invertir
el signo, para que quede positivo. Este es el punto del voltaje de salida que puede ser
medido con un multímetro digital que tenga la opción de fijar el rango y escala, para
que no esté cambiando las escalas.
Adicionalmente pasa por un Op-Amp configurado como comparador, la entrada
no invertidora del Op-Amp será el set point de un potenciómetro para ajustar los RPM
deseados. La entrada invertidora será la referencia de los RPM que salen del Op-Amp
Sumador Invertidor. La lógica de esta configuración es:
Si el RPM<Set Point, el Op-Amp satura a Vcc=15 V y enciende el Darlington Pair, lo
cual enciende el motor.
Si el RPM>Set Point, el Op-Amp envía Vdd=-15 V, lo cual apaga el Darlington Pair y
apaga el Motor.
Esta corrección lo hace de 130 a 150 veces por segundo. Es por esto que mantiene las
revoluciones constantes.
Cómputos
El abanico tiene 7 aspas, lo cual crea 7 interrupciones por cada revolución. Si
nos interesa medir RPM utilizando un osciloscopio, como el osciloscopio mide en ciclos
por segundo, tenemos que dividir esos ciclos entre 7 y luego multiplicarlo por 60,
debido a que las revoluciones que deseamos leer son por minuto. Así que la formula de
conversión de frecuencia a RPM queda expresada por:
60)7
( xFrecuencia
RPM
Esa frecuencia, pasa por un Op-Amp comparador que sirve como filtro para
eliminar la parte senosoidal y convertirla a cuadrada, de modo que si pasa de 6 voltios,
el comparador satura a Vcc = 15 V. La señal aun mantiene la misma frecuencia, así
que en el primer comparador la frecuencia queda expresada como:
FinFout
Luego, al pasar por el F/V converter, este lo convierte de frecuencia a voltaje,
con una atenuación. Cuando Fin=50 Hz, Vout = 50 mV y cuando Fin=295 Hz, Vout =
275 mV. Básicamente esta atenuando con un factor de 10000. Ósea que el voltaje de
salida de F/V converter queda expresado como:
10000
FinVout
El convertidor mantiene linealidad siempre y cuando Fin no baje de 10 Hz.
Cuando esto sucede, la salida deja de ser lineal. Inclusive, puede ser negativa, es por
esto que se utiliza un sumador invertidor para ajustar el cero.
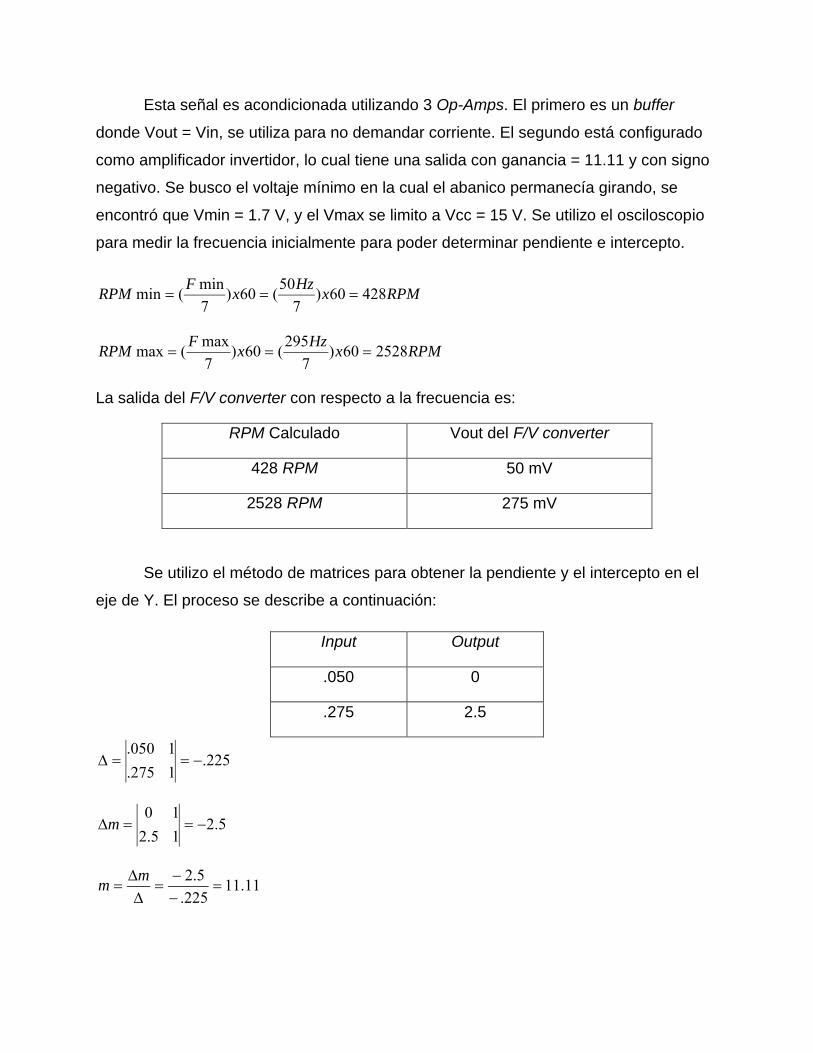
Esta señal es acondicionada utilizando 3 Op-Amps. El primero es un buffer
donde Vout = Vin, se utiliza para no demandar corriente. El segundo está configurado
como amplificador invertidor, lo cual tiene una salida con ganancia = 11.11 y con signo
negativo. Se busco el voltaje mínimo en la cual el abanico permanecía girando, se
encontró que Vmin = 1.7 V, y el Vmax se limito a Vcc = 15 V. Se utilizo el osciloscopio
para medir la frecuencia inicialmente para poder determinar pendiente e intercepto.
RPMxHz
xF
RPM 42860)7
50(60)
7
min(min
RPMxHz
xF
RPM 252860)7
295(60)
7
max(max
La salida del F/V converter con respecto a la frecuencia es:
RPM Calculado Vout del F/V converter
428 RPM 50 mV
2528 RPM 275 mV
Se utilizo el método de matrices para obtener la pendiente y el intercepto en el
eje de Y. El proceso se describe a continuación:
Input Output
.050 0
.275 2.5
225.1275.
1050.
5.215.2
10m
11.11225.
5.2
m
m
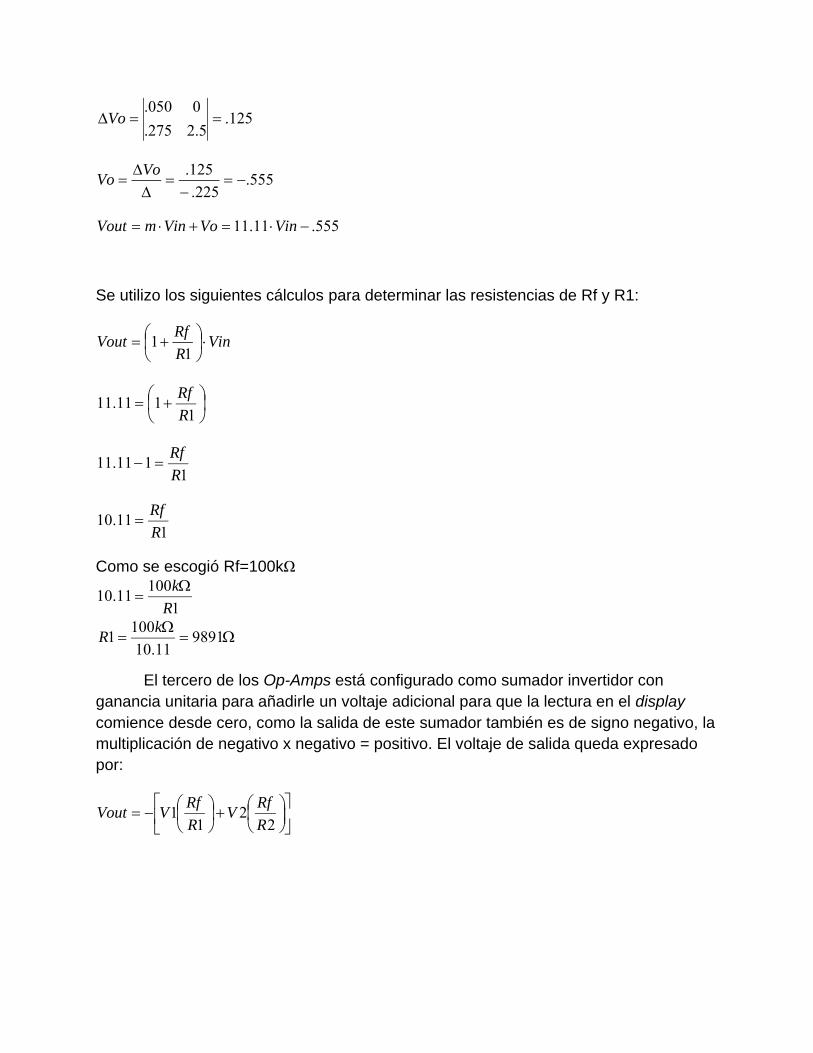
125.5.2275.
0050.Vo
555.225.
125.
Vo
Vo
555.11.11 VinVoVinmVout
Se utilizo los siguientes cálculos para determinar las resistencias de Rf y R1:
VinR
RfVout
11
1111.11
R
Rf
1111.11
R
Rf
111.10
R
Rf
Como se escogió Rf=100kΩ
1
10011.10
R
k
989111.10
1001
kR
El tercero de los Op-Amps está configurado como sumador invertidor con ganancia unitaria para añadirle un voltaje adicional para que la lectura en el displaycomience desde cero, como la salida de este sumador también es de signo negativo, la multiplicación de negativo x negativo = positivo. El voltaje de salida queda expresado por:
22
11
R
RfV
R
RfVVout
Conclusión
Queda demostrado que se puede realizar un circuito controlador con
retroalimentación de lazo de cerrado. Siguiendo pasa a paso el proceso en el diseño y
utilizando el método matricial y las debidas formulas, el trabajo se hace aun más
sencillo y los resultados son sorprendentes.
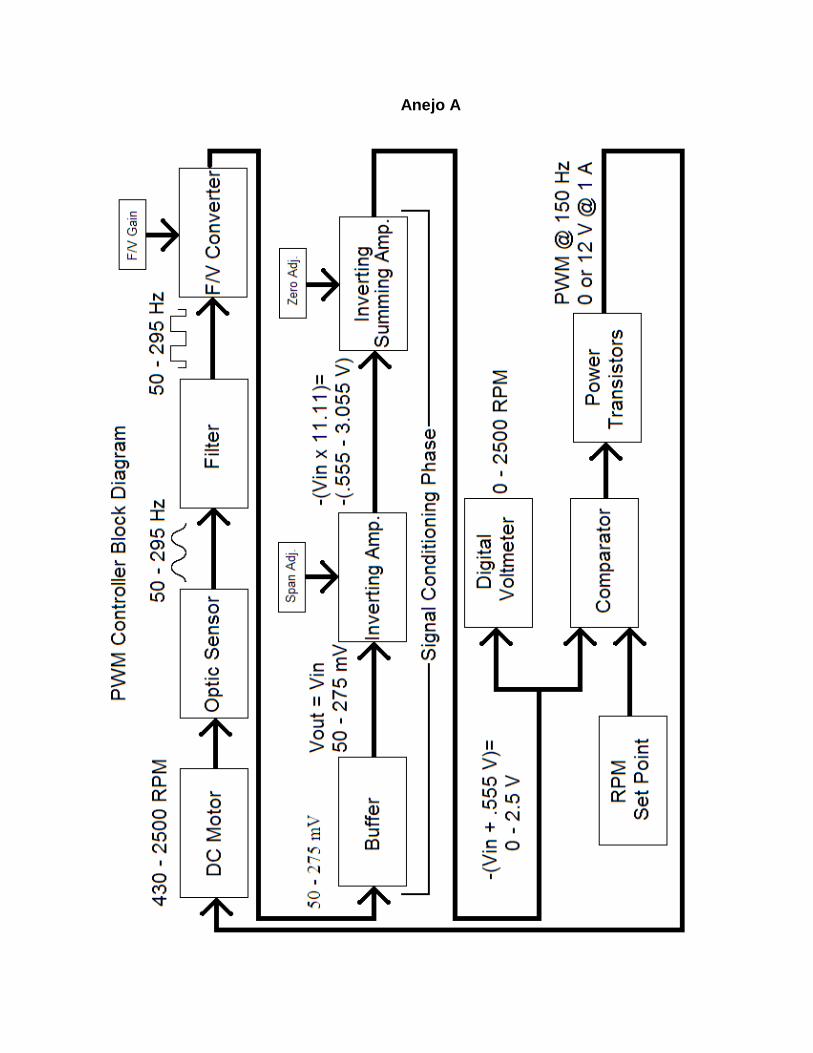
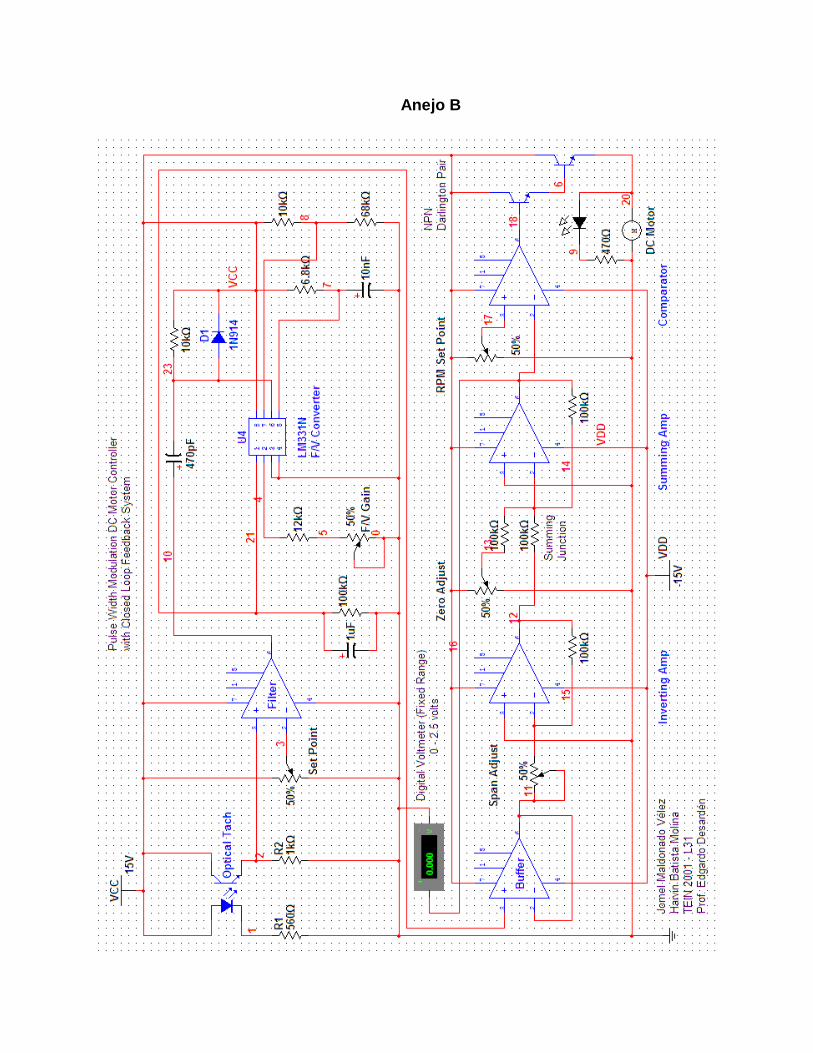
En este proyecto la parte difícil fue buscar un circuito integrado IC que nos
pudiera convertir eficazmente de frecuencia a voltaje. Inicialmente se intento con un
timer LM555, pero no se obtuvieron los resultados deseados ya que no actuaba de
forma lineal. Pero luego se logro eficientemente con el F/V Converter LM331N el cual
dio una estabilidad y linealidad superior al LM555. Después de esto continuamos todo
con Op-Amps, se utilizo un total de 5 Op-Amps para filtrar, comparar, invertir, amplificar
y sumar. Tanto el acondicionamiento se señal como el sistema de control con
retroalimentación de lazo de cerrado se logro con Op-Amps. Logramos calcular a qué
velocidad los Op-Amps verifican la entrada para regular la velocidad del motor y se
encontró como resultado 130 a 150 veces por segundos, es decir que tiene un refresh
rate de 150 Hz.
Se puede hacer casi toda operación matemática con los Op-Amps, de hecho,
este sistema de control es uno básico. Si esto fuera un sistema cuyo medio te
transmisión torsional es por engranajes, se podría hacer más sofisticado para que el
rate de aceleración sea más lento, para permitir que el engranaje tenga un periodo de
acople y no sufra por cargas cíclicas de torque excesivo, lo cual le puede reducir la vida
útil a la transmisión.
Anteriormente se añadían resistencias en serie con la carga resistiva para
disipar la energía en forma de calor y operar los motores a un voltaje parcial. El PWM
es lo que se utiliza actualmente ya que es la forma más eficiente de modular el voltaje
sin disipar energía en forma de calor. Esto se utiliza como controlador en los autos
eléctricos e híbridos, en las industrias en el área de robótica y en los procesos de la
manufactura. En fin, en donde se requiera energizar un motor que no sea A.C. ni
Stepper Motor, a revoluciones parciales.
Anejo A
Anejo B