rancang bangun kontrol motor pada perangkat...
TRANSCRIPT

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 203 -
RANCANG BANGUN KONTROL MOTORPADA PERANGKAT PENCACAH RIA IP10
Indarzah MP, Wahyuni Z. Imran, dan Sukandar
PRPN – BATAN, Kawasan Puspiptek, Gedung 71, Tangerang Selatan, 15310
ABSTRAK
RANCANG BANGUN KONTROL MOTOR PADA PERANGKAT PENCACAH RIAIP10.Telah dibangun sistem kontrol motor servo berbasis mikrokontroler AT89C2051untuk mengontrol pergerakan tray dan detektor dari Pencacah RIA IP10 hasil rancangbangun PRPN – BATAN. Tray memiliki 50 lubang dengan komposisi 10 x 5 lubang,sehingga dapat dilakukan pencacahan 5 tabung sampel secara simultan sebanyak 10 kaliuntuk keseluruhan lubang. Tray bergerak secara horizontal sedangkan detektor bergeraksecara vertikal. Sistem kontrol memiliki sensor optocoupler dan limit switch untukmendeteksi posisi detektor dan tray. Format data ASCII digunakan untuk berkomunikasidengan komputer melalui standar RS-232C.
Katakunci: mikrokontroler, motor servo, optocoupler, ASCII, pencacah RIA
ABSTRACT
DESIGN AND CONSTRUCTION OF MOTOR CONTROL ON IP10 RIA COUNTERSYSTEM. Design and construction has been developed for AT89C2051 microcontrollerbased servo motor control module for tray and detector on IP10 RIA Counter of PRPN-BATAN. Tray has 50 holes with 10 x 5 holes composition, with the result that 10 countingcan made for whole hole. Tray can move horizontally whereas detector can movevertically. Control system have optocoupler sensor and limit switch for detector and trayposition detection. ASCII data format is used for communication to the computer with RS-232C standard.
Keywords:microcontroller, servo motor, optocoupler, ASCII, RIA counter.
1. PENDAHULUAN
Perangkat pencacah RIA (Radioimmunoassay) merupakan perangkat yang biasa
dijumpai di laboratorium yang berfungsi untuk analisa darah manusia, analisis kandungan
progesteron pada sampel susu binatang sapi dan masih banyak aplikasi lainnya.
Pencacah RIA IP10 merupakan pencacah RIA hasil rancang bangun PRPN –
BATAN, memiliki keunggulan mampu mencacah secara simultan sebanyak 5 tabung
sampel. Untuk meletakkan tabung sampel digunakan sebuah tray yang terbuat dari
flexiglass. Tray ini memiliki lubang sebanyak 50 buah, dengan komposisi 5 X 10 lubang.
Detektor yang digunakan adalah NaI(Tl) sebanyak 5 buah. Untuk proses pencacahan

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 204 -
diperlukan pengaturan pergerakan detektor secara vertikal (naik dan turun) dan
pergerakan tray sampel secara horizontal (kanan dan kiri). Pergerakan posisi detektor
dan tray menggunakan motor servo, sehingga diperlukan motor servo sebanyak 2 buah.
Ketepatan posisi dan pergerakan tabung sampel dengan detektor merupakan hal yang
penting, karena mempengaruhi ketelitian hasil pencacahan serta keamanan tabung
sampel itu sendiri. Apabila terjadi ketidaktepatan, maka kemungkinan terburuk yang
terjadi adalah pecahnya tabung sampel atau sampel yang tumpah. Pencacahan
keseluruhan sampel yang terdapat pada tray akan memerlukan proses pencacahan
sebanyak 10 kali, dengan sekali cacahan simultan sebanyak 5 buah.
Ilustrasi pergerakan posisi tray dan detektor dapat dilihat pada gambar 1 sebagai
berikut:
Gambar 1. Pergerakan detektor dan tray
Kondisi awal tray dan detektor adalah pada home. Sebagai contoh ketika akan
dilakukan pencacahan pada tabung sampel yang tersimpan pada kolom 1, maka tray
akan bergerak sampai posisi kolom 1 berada tepat di atas posisi detektor. Kemudian
detektor akan bergerak ke posisi maksimum untuk selanjutnya dilakukan proses
pencacahan. Bila proses pencacahan selesai, maka detektor akan kembali ke posisi
home kemudian tray juga akan kembali ke posisi home. Diagram alir proses tersebut
dapat dilihat pada Gambar 2.

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 205 -
Gambar 2. Diagram alir pergerakan motor untuk proses pencacahan
Pada makalah ini akan dibahas rancang bangun sistem penggerak posisi detektor
dan tray, yang meliputi rancang bangun modul elektronik motor penggerak dan perangkat
lunak untuk kontrol pergerakan posisi detektor dan tray.
2. TEORI
Sistem penggerak posisi tray dan detektor pada perangkat RIA IP10 menggunakan
komponen utama motor servo produksi Panasonic dengan tipe MSMD042P10. Untuk
mengoperasikan motor digunakan driver yang sesuai yaitu Panasonic dengan tipe
MBDDT2210, sehingga proses pengaturan kerja motor menjadi lebih mudah.
Pengoperasian motor dilakukan dengan memberikan pulsa pada PULS2 pin untuk gerak
putar searah putaran jarum jam (CW), atau memberikan pulsa pada SIGN2 pin untuk
gerak putar berlawanan arah jarum jam (CCW). Sumber pulsa dan pengaturannya
dilakukan oleh modul kontrol motor.
Interkoneksi antara motor driver dengan modul kontrol motor dapat dilihat pada
gambar 3 berikut ini:

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 206 -
Gambar 3. Interkoneksi motor driver dengan modul kontrol motor [1]
Pengaturan perputaran motor dilakukan oleh modul kontrol dengan mengikuti format
masukan yang sesuai dengan gambar 4.
Gambar 4. Sinyal kontrol pengoperasian motor [1]
Modul kontrol menggunakan komponen utama mikrokontroler 8 bit AT89C2051 dari
Atmel. Spesifikasi mikrokontroler AT89C2051 adalah sebagai berikut [2]:
Kompatibel dengan keluarga MCS®-51
Memiliki 2KB Flash Programmable and Erasable Read-Only Memory (PEROM)
Tegangan operasi 2.7V-6VDC
Operasi statik penuh : 0 Hz s.d 24 MHz
2 tingkat program memory lock
128 x 8-bit RAM internal
15 Programmable I/O Lines
2 buah timer/counter 16 bit
6 sumber interupsi
Programmable serial UART
Direct LED drive output
On-chip analog comparator

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 207 -
Mikrokontroler AT89C2051 yang digunakan merupakan versi yang lebih minimal
dari MCS®-51, terutama dalam hal jumlah memory dan jumlah I/O yang dimiliki. Port yang
dimiliki adalah Port 1 dan Port 3 yang mampu menyediakan 15 I/O dari total 20 pin yang
dimiliki. Diagram blok mikrokontroler dapat dilihat pada gambar 5. Dari gambar tersebut
terlihat Port 1 yang memiliki 8 bit bidirectional I/O. Pin P1.2 s.d P1.7 memiliki pull-up
internal. P1.0 dan P1.1 memerlukan pull-up eksternal. P1.0 dan P1.1 juga bertindak
sebagai masukan positif (AIN0) dan masukan negatif (AIN1) dari komparator analog on-
chip yang presisi. Keluaran Port 1 mampu menyediakan arus sink sebesar 20 mA
sehingga dapat mengendalikan LED secara langsung. Port 3 terutama pin P3.0 s.d P3.5
dan P3.7 adalah bidirectional I/O yang memiliki pull-up internal. P3.6 terhubung secara
hard-wired sebagai masukan yang terhubung dengan keluaran dari komparator dan tidak
dapat diakses sebagai I/O. Port 3 juga mampu menyediakan arus sink sebesar 20 mA.
Gambar 5. Diagram blok AT89C2051 [2]

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 208 -
3. TATAKERJA (BAHAN DAN METODE) RANCANGAN
Sistem kontrol motor pencacah RIA IP10 dirancang untuk dapat menggerakkan dua
buah motor servo berdasarkan instruksi yang diberikan dari komputer. Apabila instruksi
tersebut telah selesai dilaksanakan,selanjutnya sistem kontrol akan memberikan respon
(laporan) kepada komputer, sehingga komputer dapat melaksanakan instruksi selanjutnya.
Sistem komunikasi antara komputer dengan kontrol motor menggunakan komunikasi
standar RS-232C.
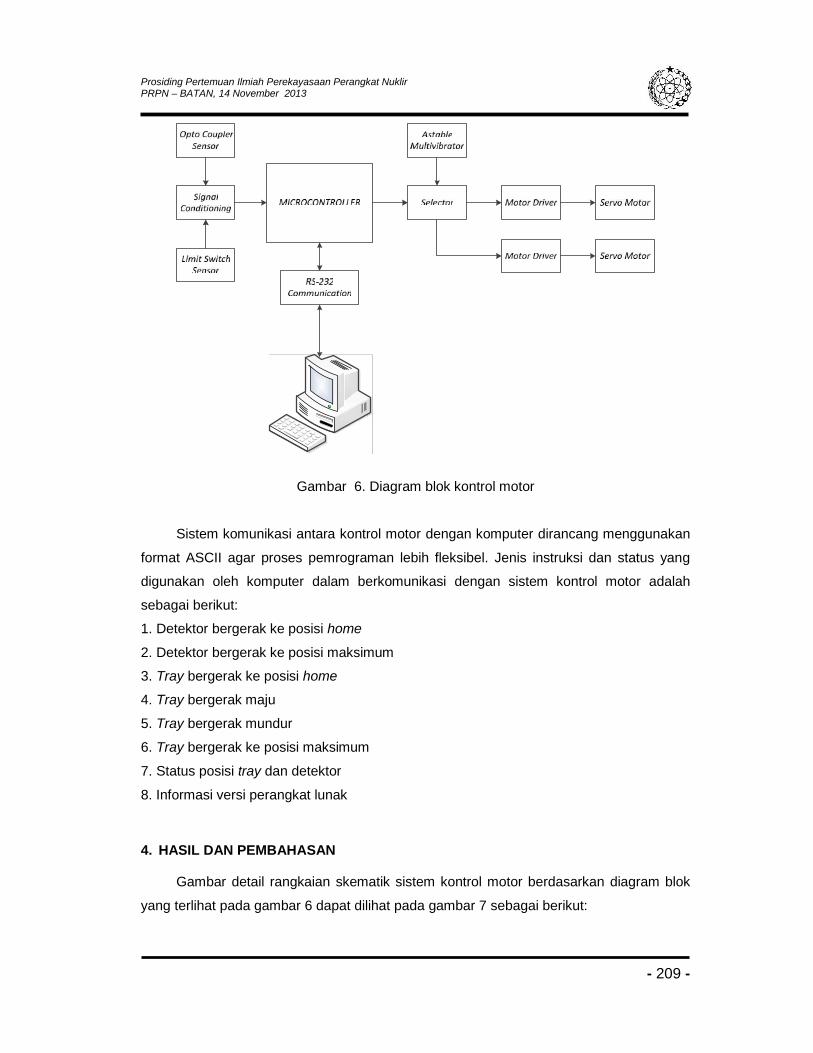
Diagram blok kontrol motor dapat dilihat pada gambar 6, terlihat bahwa komunikasi
antara komputer dengan kontrol motor dapat terjadi dalam dua arah. Hal ini diperlukan
mengingat bahwa sistem kontrol motor berfungsi untuk meringankan beban komputer,
serta menjamin komunikasi yang terjadi tidak terjadi kesalahan.
Untuk mendeteksi posisi tray sampel yang diinginkan untuk proses pencacahan,
digunakan sensor optocoupler. Untuk bahan deteksi optocoupler tersebut digunakan
sebuah lubang pada jalur yang akan dilewati tray dan bersesuaian dengan posisi kolom,
dengan jarak antar lubang 4.5 cm. Jumlah lubang yang dibuat sebanyak 10 buah yang
sesuai dengan jumlah kolom pada tray sampel. Mikrokontroler akan membaca posisi tray
berdasarkan keluaran dari optocoupler.
Sensor limit switch digunakan untuk mendeteksi posisi tray atau detektor, apakah
sudah berada pada posisi home atau sudah bergerak dan berada pada posisi maksimum.
Ada 4 posisi yang akan dikenali oleh mikrokontroler, yaitu posisi detektor home, posisi
detektor maksimum, posisi tray home dan posisi tray maksimum.
Kecepatan gerak motor ditentukan oleh pulsa yang dihasilkan oleh astable
multivibrator. Selector akan meloloskan pulsa ke pin masukan yang sesuai pada motor
driver berdasarkan jenis instruksi yang diberikan oleh komputer.
Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 209 -
Gambar 6. Diagram blok kontrol motor
Sistem komunikasi antara kontrol motor dengan komputer dirancang menggunakan
format ASCII agar proses pemrograman lebih fleksibel. Jenis instruksi dan status yang
digunakan oleh komputer dalam berkomunikasi dengan sistem kontrol motor adalah
sebagai berikut:
1. Detektor bergerak ke posisi home
2. Detektor bergerak ke posisi maksimum
3. Tray bergerak ke posisi home
4. Tray bergerak maju
5. Tray bergerak mundur
6. Tray bergerak ke posisi maksimum
7. Status posisi tray dan detektor
8. Informasi versi perangkat lunak
4. HASIL DAN PEMBAHASAN
Gambar detail rangkaian skematik sistem kontrol motor berdasarkan diagram blok
yang terlihat pada gambar 6 dapat dilihat pada gambar 7 sebagai berikut:

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 210 -
XTAL24
RST1
P1.0 12P1.1 13P1.2 14P1.3 15P1.4 16P1.5 17P1.6 18P1.7 19P3.2/INT06 P3.3/INT17 P3.4/T08 P3.5/T19 P3.0/RXD 2P3.1/TXD 3P3.711
XTAL15
U2AT89C2051
LS4
LS3
LS2
LS1
R14K7
R24K7
R34K7
R44K7
+5V
X111.0592Mhz
C133pF
C233pF
R510k
C310uF
+5V
R610R
R7330
+5V
R810R
R9330
+5V
R1010R
R11330
+5V
R1210R
R13330
+5V
JP3
JP3
JP1
JP4
1
23
U3:A
7408
12
1311
U3:D
7408
4
56
U3:B
7408
9
108
U3:C
7408
R14
1k
R15
1k
R16
1k
R17
1k
Q1BC547
Q2BC547
Q3BC547
Q4BC547
12345
J1MOTOR
162738495
J2RS232
R 4
DC7Q3
GN
D1
VCC
8
TR 2TH6
CV 5
U4
NE555
53%
P110K
C510uF
C40.01uF
+5V
R193K3
R18470
R201k
PIN 10 = GNDPIN 20 = VCC
C100.1uF
Q52N2222
13 12
U1:D74LS14
1 2
U1:A74LS14
3 4
U1:B74LS14
5 6
U1:C74LS14
T1IN11R1OUT12T2IN10R2OUT9
T1OUT 14R1IN 13
T2OUT 7R2IN 8
C2+
4
C2-
5
C1+
1
C1-
3
VS+ 2VS- 6
U5MAX232
123
J5OPTO1
123J6
OPTO2
123J7
OPTO3
123
J8OPTO4
R214K7
R224K7
C710uF
C810uF
C610uF
+5V
C910uF
+5V
12
J4PWR
J3LIMIT SWITCH
M2M3M4
GND
TXRX
D3LED
M1
Gambar 7. Skematik sistem kontrol motor
Port 3 digunakan sebagai media masukan mikrokontroler untuk membaca hasil
deteksi optocoupler yang merupakan posisi tray sampel. Apabila posisi tray sampel telah
tepat berada pada posisi yang ditentukan, masukan tegangan pada pin Port 3 yang
bersesuaian akan berubah nilainya dari tegangan 0 VDC menjadi 5 VDC. Pergerakan
motor yang menggerakan posisi tray diatur oleh kontrol motor berdasarkan informasi dari
optocoupler. Ketika instruksi untuk menggerakkan tray diberikan pada mikrokontroler
yang terdapat pada kontrol motor, maka pulsa diberikan pada PULS pin atau SIGN pin
yang sesuai. Selama tray bergerak dilakukan pengecekan status dari optocoupler.
Apabila sinyal dari optocoupler bernilai 5VDC maka kontrol motor akan menghentikan
pemberian pulsa pada pin tersebut, sehingga tray akan berhenti. Keadaan ini
menunjukkan bahwa tray telah berada pada posisi kolom tertentu.
Instalasi sensor pada sistem tray dapat dilihat pada gambar 8. Terlihat bahwa
lubang yang bersesuaian dengan posisi kolom pada tray terdeteksi oleh sensor
optocoupler yang terletak pada tray. Hal ini dapat dilihat secara visual dengan indikator
LED yang menyala pada optocoupler. Lubang ini merupakan penanda posisi penempatan
tabung sampel. Ada 10 lubang penanda yang menunjukkan 10 posisi penempatan tabung
sampel. Hasil pengujian menunjukkan bahwa posisi dan ukuran lubang serta posisi
penempatan sensor, menentukan kepresisian proses deteksi.

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 211 -
Port 1 khususnya P1.4 s.d P1.7 digunakan sebagai media masukan mikrokontroler
untuk membaca posisi tray dan detektor, dan juga sebagai pengaman. Mikrokontroler
akan mampu mendeteksi posisi tray dan detektor apakah pada posisi maksimum atau
home berdasarkan pada perubahan tegangan dari 5 VDC menjadi 0 VDC yang terdapat
pada limit switch. Ketika instruksi untuk menggerakkan tray atau detektor diberikan pada
kontrol motor, pulsa diberikan pada PULS pin atau SIGN pin yang sesuai pada motor
driver. Selama tray atau detektor bergerak, dilakukan pengecekan terhadap kondisi limit
switch. Bila sinyal dari limit switch bernilai 0 VDC, maka pemberian pulsa pada motor
driver dihentikan yang mengakibatkan detektor atau tray akan berhenti bergerak.
Gambar 8. Instalasi sensor optocoupler
Modul komunikasi menggunakan komponen MAX232, sehingga mikrokontroler
dapat melakukan komunikasi dengan standar RS-232C dengan komputer. MAX232 pada
dasarnya adalah suatu konverter tegangan dari standar RS-232C ke 5VDC atau
sebaliknya. MAX232 diperlukan karena tegangan kerja beserta keluaran I/O pada
mikrokontroler adalah 5VDC.
Modul astable multivibrator menggunakan komponen timer NE555, dengan
frekuensi yang dapat diatur dengan kisaran 12 Hz. Pengaturan frekuensi dilakukan untuk
memperoleh kecepatan gerak motor dan mendapatkan kepresisian sesuai dengan yang
diinginkan. Terdapat modul indikator yang menunjukkan bahwa modul sedang beroperasi.
Keluaran astable multivibrator selanjutnya diberikan ke masing-masing masukan motor
driver melalui selector yang terdiri dari gerbang AND dan rangkaian saklar yang

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 212 -
dikendalikan oleh mikrokontroler, untuk memilih salah satu dari ke empat masukan motor
driver yang akan digunakan.
Hasil rancangan PCB dari skematik sistem kontrol motor dan bentuk fisik hasil
perakitan, dapat dilihat pada gambar 9 dan 10 sebagai berikut:
Gambar 9. Tata letak komponen dan layout PCB kontrol motor
Gambar 10. Bentuk fisik modul sistem kontrol motor
Cara kerja dari sistem kontrol motor, khususnya pada mikrokontroler dalam
menangani instruksi pergerakan detektor dan tray, dapat dilihat pada state machine pada
gambar 11.

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 213 -
Gambar 11. State machine program pada mikrokontroler
Mikrokontroler akan menggerakkan motor jika instruksi yang diberikan melalui
komunikasi RS-232C dikenali. Jenis instruksi yang dikenali oleh mikrokontroler dapat
dilihat pada tabel 1.
Tabel 1. Jenis instruksi yang dikenali oleh mikrokontroler
No. Kode Instruksi Arti Instruksi1. !C DH Gerak detektor ke posisi home2. !C DS Gerak detektor ke posisi maksimum (set)3. !C TH Gerak tray ke posisi home4. !C TF Gerak tray maju5. !C TB Gerak tray mundur6. !C TM Gerak tray ke posisi maksimum7. !C CS Status posisi tray dan detektor8. !C CV Informasi versi perangkat lunak
Mikrokontroler akan memberikan respon terhadap instruksi yang diberikan berupa
data ACK dan untuk respon terhadap status adalah berupa status dari detektor diikuti
dengan status tray serta informasi firmware yaitu berupa versi dari perangkat lunak.
Status dari detektor dan tray mengikuti kode yang sesuai dengan tabel 2.
Tabel 2. Informasi Status detektor dan tray
StatusDetektor Informasi Status Status
Tray Informasi Status
H Detektor pada posisi Home H Tray pada posisi HomeS Detektor pada posisi Maksimum
(set)S Tray pada posisi kolom
tertentuM Tray pada posisi maksimum
Pemberian instruksi diawali dengan ! dan diakhiri dengan return. Respon status diawali
dengan ^, kemudian respon data dan diakhiri dengan return

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 214 -
Prosedur pengujian kerja sistem kontrol motor dilakukan dengan menggunakan
program HyperTerminal dan program bantu Uji Fungsi Kontrol RIA yang tampilannya
dapat dilihat pada gambar berikut:
Gambar 12. Program bantu untuk pengujian sistem kontrol motor
Hasil pengujian menunjukkan hasil sebagaimana yang diharapkan. Beberapa hasil
pengujian dapat dilihat pada gambar 13, yang menunjukkan bahwa tray bergerak ke
posisi home, kemudian bergerak ke posisi sampel 1 dan selanjutnya detektor bergerak ke
posisi maksimum dimana proses pencacahan sampel dapat dilakukan.
Gambar 13. Hasil pengujian pergerakan tray dan detektor

Prosiding Pertemuan Ilmiah Perekayasaan Perangkat NuklirPRPN – BATAN, 14 November 2013
- 215 -
5. KESIMPULAN
Sistem kontrol motor untuk perangkat pencacah RIA IP10 telah berhasil dirancang
dan dibangun serta diujicoba dengan hasil yang sesuai dengan diharapkan. Kemudahan
pengujian diperoleh dengan penggunaan format instruksi ASCII. Proses pengujian dapat
menggunakan hyperterminal, sehingga proses pengujian menjadi lebih sederhana dan
tidak diperlukan pembuatan program uji tersendiri. Posisi dan ukuran lubang deteksi untuk
sensor optocoupler serta posisi penempatan optocoupler menentukan kepresisian
pergerakan tray. Pengaturan frekuensi pada astable multivibrator diperlukan untuk
mendapatkan kecepatan, kepresisian dan kehalusan pergerakan tray dan detektor sesuai
yang diinginkan.
6. DAFTAR PUSTAKA
1. PANASONIC, “Instruction Manual AC Servo Motor and Driver Minas A4 Series”,
Matsushita Electric Industrial Co.Ltd, Osaka Japan, 2004.
2. ATMEL, “AT89C2051 8-bit Microcontroller with 2K Bytes Flash”, Atmel, 2008.
3. INTEL, “MCS®51 Microcontroller Family User’s Manual, Intel, 1994
TANYA JAWAB
Pertanyaan:
1. Apakah ada perbedaan posisi sampel dengan detector? Berdasarkan Ferasi
dibandingkan dengan hasil pengukuran? (Tri H)
Jawaban:
1. Tidak terjadi perbedaan ketepatan deteksi posisi sampel karena sebelumnya dilakukan
pengukuran terhadap posisi sinyal tersebut sebelum dilakukan penandaan posisi.
Perbedaaan terjadi hanya pada posisi sinyal yang tidak seluruhnya presisi, yang
diakibatkan oleh proses pembulatan lubang sinyal pada tray.